Как работает реле контроля скорости электродвигателя. Какие бывают виды реле скорости. Где применяются реле контроля скорости в системах управления электроприводом. Какие преимущества дает использование реле скорости.
Принцип работы реле контроля скорости электродвигателя
Реле контроля скорости электродвигателя — это устройство, которое отслеживает частоту вращения вала электродвигателя и выдает управляющий сигнал при достижении заданной скорости. Как работает такое реле?
Основной принцип работы реле скорости заключается в преобразовании механического вращения вала двигателя в электрический сигнал. Это может осуществляться разными способами:
- С помощью постоянного магнита, вращающегося вместе с валом, и неподвижной обмотки. При вращении магнита в обмотке наводится ЭДС, пропорциональная скорости.
- С использованием тахогенератора — небольшой электрической машины, вырабатывающей напряжение, пропорциональное скорости вращения.
- На основе центробежного механизма, срабатывающего под действием центробежной силы при определенной скорости.
Полученный электрический сигнал сравнивается с заданным пороговым значением. При его превышении происходит срабатывание выходных контактов реле.
Виды реле контроля скорости электродвигателей
Существует несколько основных типов реле контроля скорости электродвигателей:
1. Индукционные реле скорости
Принцип действия основан на взаимодействии магнитных полей вращающегося постоянного магнита и неподвижного статора с короткозамкнутой обмоткой. При достижении заданной скорости статор поворачивается и переключает контакты.
2. Реле скорости с тахогенератором
Используется тахогенератор постоянного или переменного тока, напряжение на выходе которого пропорционально скорости вращения. Это напряжение сравнивается с опорным и управляет выходным реле.
3. Центробежные реле скорости
Имеют простую конструкцию на основе центробежного механизма. При определенной скорости вращения центробежная сила преодолевает сопротивление пружины и замыкает контакты.
4. Электронные реле скорости
Современные устройства на основе микропроцессоров. Могут использовать различные датчики скорости и обеспечивают высокую точность контроля.
Применение реле контроля скорости в системах управления электроприводом
Где используются реле контроля скорости электродвигателей? Основные области применения:
- Системы плавного пуска и торможения двигателей
- Защита двигателей от перегрузок и заклинивания
- Стабилизация скорости вращения при изменении нагрузки
- Автоматическое управление производственными процессами
- Контроль работы конвейеров, вентиляторов, насосов
- Системы позиционирования в станках с ЧПУ
Реле скорости позволяют повысить надежность и эффективность работы электроприводов в различных отраслях промышленности.
Преимущества использования реле контроля скорости
Применение реле контроля скорости в системах управления электродвигателями дает ряд важных преимуществ:
- Точный контроль скорости вращения вала двигателя
- Защита двигателя от перегрузок и аварийных режимов
- Автоматизация процессов пуска, останова и регулирования скорости
- Повышение энергоэффективности электропривода
- Увеличение срока службы двигателя и механизмов
- Оптимизация технологических процессов
Таким образом, реле контроля скорости являются важным элементом современных систем управления электроприводом, обеспечивая их надежную и эффективную работу.

Настройка и эксплуатация реле контроля скорости
Для правильной работы реле контроля скорости электродвигателя необходимо выполнить его настройку и соблюдать правила эксплуатации. Как это сделать?
Настройка реле скорости
Основные этапы настройки:
- Выбор диапазона контролируемых скоростей
- Установка порога срабатывания реле
- Настройка времени задержки срабатывания
- Калибровка датчика скорости
- Проверка работы реле на разных скоростях
Точная процедура настройки зависит от типа и модели конкретного реле скорости. Необходимо следовать инструкции производителя.
Правила эксплуатации
При использовании реле контроля скорости следует соблюдать следующие правила:
- Устанавливать реле в соответствии с требованиями к условиям эксплуатации
- Проводить периодическую проверку настроек и калибровку
- Контролировать надежность электрических соединений
- Своевременно очищать реле от пыли и загрязнений
- Не допускать механических повреждений корпуса и внутренних элементов
Соблюдение этих правил обеспечит длительную и надежную работу реле контроля скорости в составе системы управления электроприводом.

Перспективы развития реле контроля скорости
Развитие технологий приводит к появлению новых типов реле контроля скорости электродвигателей. Какие тенденции наблюдаются в этой области?
Основные направления развития:
- Повышение точности измерения скорости
- Расширение функциональных возможностей
- Интеграция с цифровыми системами управления
- Уменьшение габаритов и энергопотребления
- Использование беспроводных технологий передачи данных
Современные реле скорости все чаще строятся на базе микропроцессоров, что позволяет реализовать сложные алгоритмы обработки сигналов и управления. Это повышает их точность и расширяет области применения.
Перспективным направлением является создание интеллектуальных реле скорости, способных адаптироваться к изменяющимся условиям работы и самостоятельно оптимизировать свои параметры.
Таким образом, реле контроля скорости электродвигателей продолжают совершенствоваться, обеспечивая все более эффективное управление электроприводами в различных отраслях промышленности.
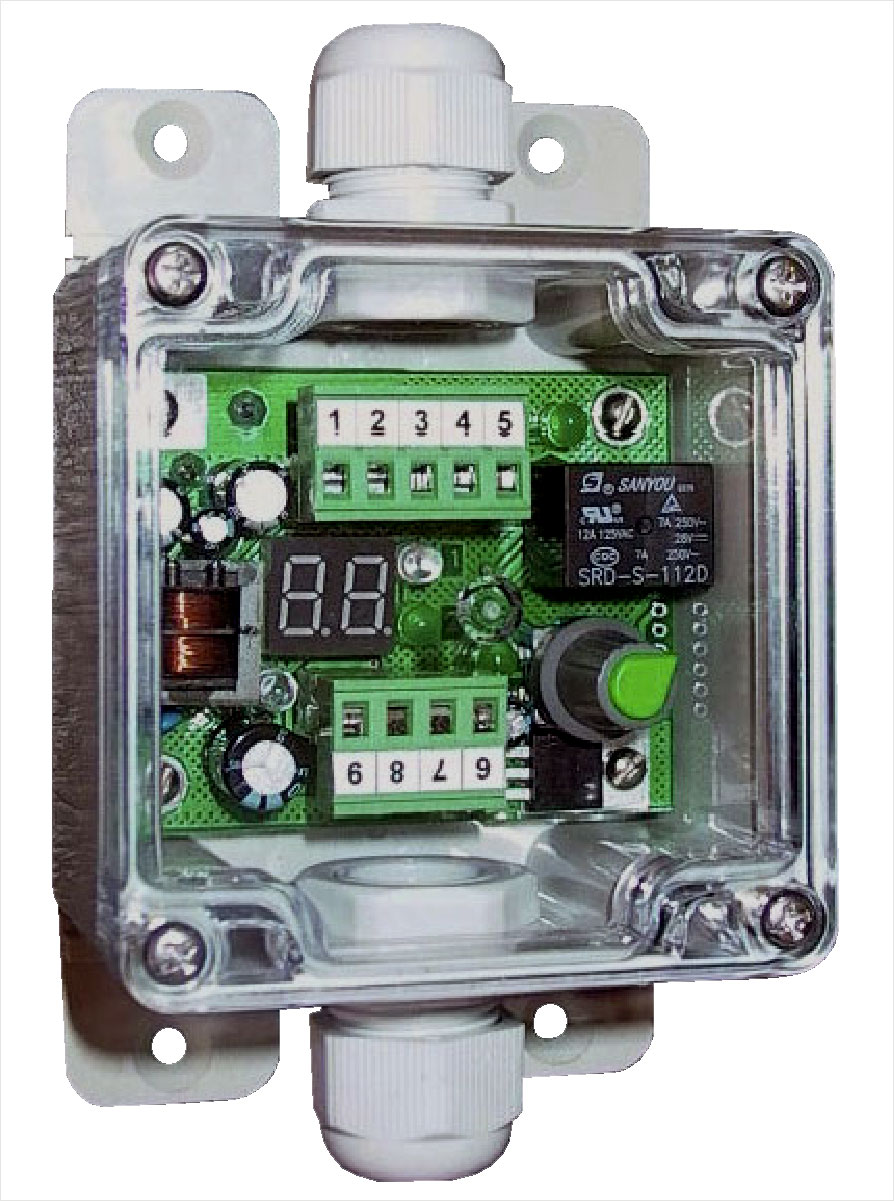
Реле контроля скорости РКС-М
Общие сведения
Реле торможения противовключением типа РКС-М предназначено для применения в схемах автоматического торможения трехфазных асинхронных двигателей с короткозамкнутым ротором методом противовключения мощностью не более 10 кВт. РКС-МХ4:
РКС — тип реле;
М — модернизированный;
Х4 — климатическое исполнение (УХЛ, О) и категория размещения (4)
по ГОСТ 15543.1-89.
Условия эксплуатации
Высота над уровнем моря не более 2000 м.
Окружающая среда невзрывоопасная, не содержащая пыли (в том числе токопроводящей) в количестве, нарушающем работу реле, а также агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию.
Тип атмосферы по содержанию коррозионных агентов — II по ГОСТ 15150-69.
Группа механического исполнения М8 по ГОСТ 17516.1-90.
Рабочее положение — при горизонтальном расположении оси вала реле. Не допускается наклон вала реле более чем на 5°.
Место установки, защищенное от попадания воды, масла, эмульсии и т. п..
п..
Реле для внутригосударственных и экспортных поставок соответствуют ТУ 16-523.240-75.
Требования безопасности реле должны соответствовать ГОСТ 12.2.007.6-93. ТУ 16-523.240-75
Номинальный ток контактов, А — 2,5
Номинальное напряжение переменного тока на контактах, В — 500
Номинальная частота тока, Гц — 50; 60
Максимальная частота вращения ротора, мин—1— 3000
число переключающих контактов — 2
число органов настройки — 2
Коммутационная износостойкость контактов, циклов срабатывания, не менее (при токе на контактах до 0,45 А и соsj=0,3-0,45) — 0,8·106в каждую сторону вращения
Масса, кг, не более — 1,25
Гарантийный срок для внутригосударственных поставок — 2,5 года со дня ввода реле в эксплуатацию, для поставок на экспорт — 1 год со дня ввода реле в эксплуатацию, однако не более 2 лет с момента проследования их через государственную границу.
Конструкция и принцип действия
Реле состоит из основания и корпуса, внутри которых расположены статор, постоянный магнит и подвижная контактная система (рис. 1, 2).
1, 2).
Контактная часть реле:
1 — размыкающий контакт;
2 — замыкающий контакт;
3 — поводок;
4 — орган настройки
Общий вид, габаритные и установочные размеры реле РКС-М:
1 — соединительная полумуфта;
2 — эластичная полумуфта
Статор выполнен в виде короткозамкнутых обмоток типа «беличья клетка». Постоянный магнит расположен на валике, который соединяется с валом электродвигателя при помощи соединительной и эластичной полумуфт. Контактная часть реле расположена на лицевой стороне корпуса.
Поводок, переключающий контакты, закреплен на статоре неподвижно. В нерабочем положении реле поводок расположен симметрично относительно двух переключающих контактов.
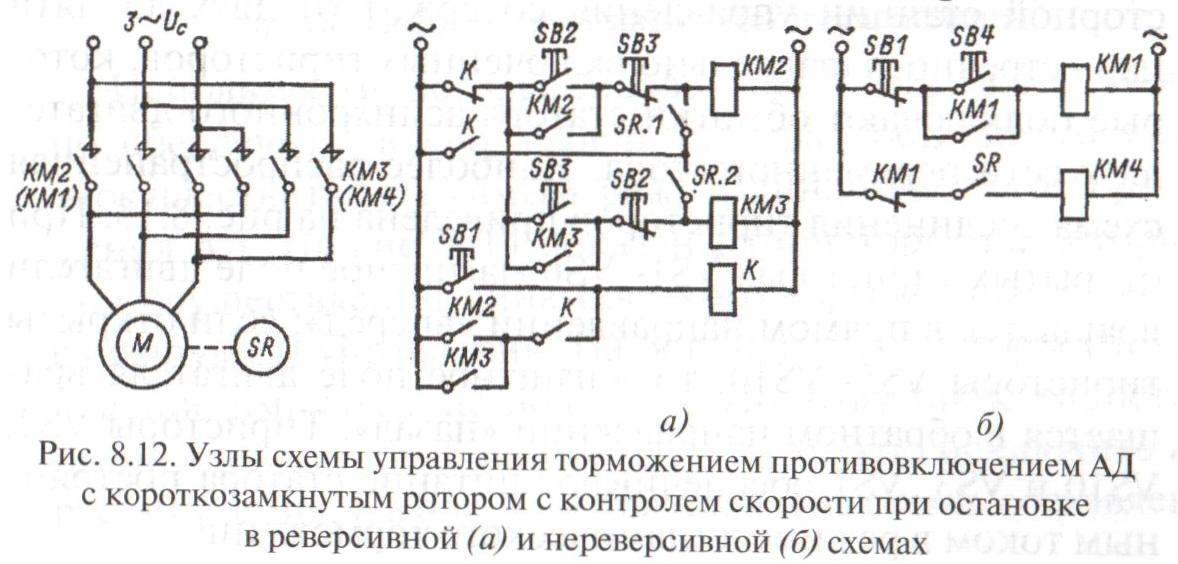
Реле работает следующим образом. При вращении вала реле постоянный магнит, вращающийся внутри корпуса реле, наводит ЭДС в обмотках поворотного статора. В результате взаимодействия магнитных потоков вращающегося магнита и статора, последний поворачивается. Укрепленный на статоре поводок осуществляет размыкание и замыкание соответствующих контактов. Схемы включения реле для торможения приведены на рис. 3-8.
Схемы включения реле для торможения приведены на рис. 3-8.
Схема подключения реле для торможения нереверсивного электродвигателя:
KM1, KM2 — контакторы;
K3 — контакт реле, замыкающийся при вращении электродвигателя;
SB2 — кнопка «пуск»;
SB1 — кнопка «стоп»
Схема подключения реле для торможения реверсивного электродвигателя:
KM1, KM2 — контакторы;
K3 — контакты реле, замыкающиеся и размыкающиеся при вращении электродвигателя вперед;
K4 — контакты реле, замыкающиеся и размыкающиеся при вращении электродвигателя назад;
SB2 — кнопка «пуск вперед»;
SB3 — кнопка «пуск назад»;
SB1 — кнопка «стоп»
Схема подключения реле для торможения нереверсивного электродвигателя:
KM1, KM2 — контакторы;
K3 — контакт реле, замыкающийся при вращении электродвигателя;
KL — промежуточное реле;
SB2 — кнопка «пуск»;
SB1 — кнопка «стоп»
Схема подключения реле для торможения реверсивного электродвигателя:
KM1, KM2 — контакторы;
K3 — контакт реле, замыкающийся при вращении электродвигателя вперед;
K4 — контакт реле, замыкающийся при вращении электродвигателя назад;
KL1, KL2 — промежуточные реле;
SB2 — кнопка «пуск вперед»;
SB3 — кнопка «пуск назад»;
SB1 — кнопка «стоп»
Схема подключения реле для торможения нереверсивного электродвигателя с большой скоростью торможения:
KM1-KM3 — контакторы;
K4 — контакт реле, замыкающийся при вращении электродвигателя;
SB2 — кнопка «пуск»;
SB1 — кнопка «стоп»
Схема подключения реле для торможения реверсивного электродвигателя с большой скоростью торможения:
KM1-KM3 — контакторы;
K4 — контакты реле, замыкающиеся и размыкающиеся при вращении электродвигателя вперед;
K5 — контакты реле, размыкающиеся и замыкающиеся при вращении электродвигателя назад;
KL — промежуточное реле;
SB1 — кнопка «стоп»;
SB2 — кнопка «пуск вперед»;
SB3 — кнопка «пуск назад»;
K — резисторы в цепи статора электродвигателя
При нажатии кнопки «стоп» выключается контактор прямого направления вращения электродвигателя и одновременно включается контактор противоположного направления вращения, в результате чего происходят торможение противовключением.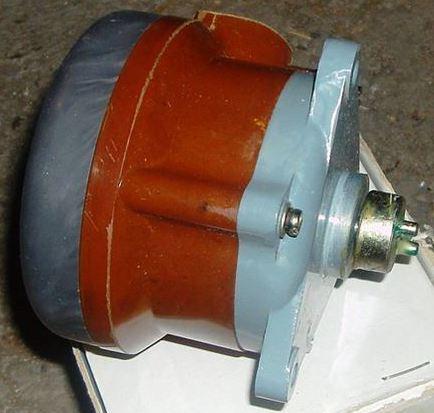
Снижение скорости вращения вала уменьшает силу магнитного взаимодействия магнита и статора реле, контактные пружины возвращают поворотный статор в начальное положение и торможение прекращается, после чего реле снова готово к работе.
Схемы, приведенные на рис. 3-6, применяются для малой скорости вращения при торможении.
В случае, если в процессе работы машины возможен поворот вала реле «от руки», рекомендуются схемы, приведенные на рис. 5 и 6. В эти схемы включены промежуточные реле, которые предотвращают возможность включения контакторов при вращении рабочих органов машины «от руки», когда электродвигатель отключен.
Если скорость торможения велика, то следует применять схемы, приведенные на рис. 7, 8. Резисторы в этих схемах предназначены для снижения скорости торможения. Значение их сопротивлений, Ом/фазу можно определить по формуле:
R=(0,12-0,2)U/I,
где U — номинальное напряжение электродвигателя, В;
I — ток статора электродвигателя, А.В комплект поставки входят: реле, техническое описание и инструкция по эксплуатации — 1 экз. на партию реле до 16 шт., отправляемую в один адрес.
на партию реле до 16 шт., отправляемую в один адрес.
Устройства контроля скорости электродвигателей | Онлайн журнал электрика
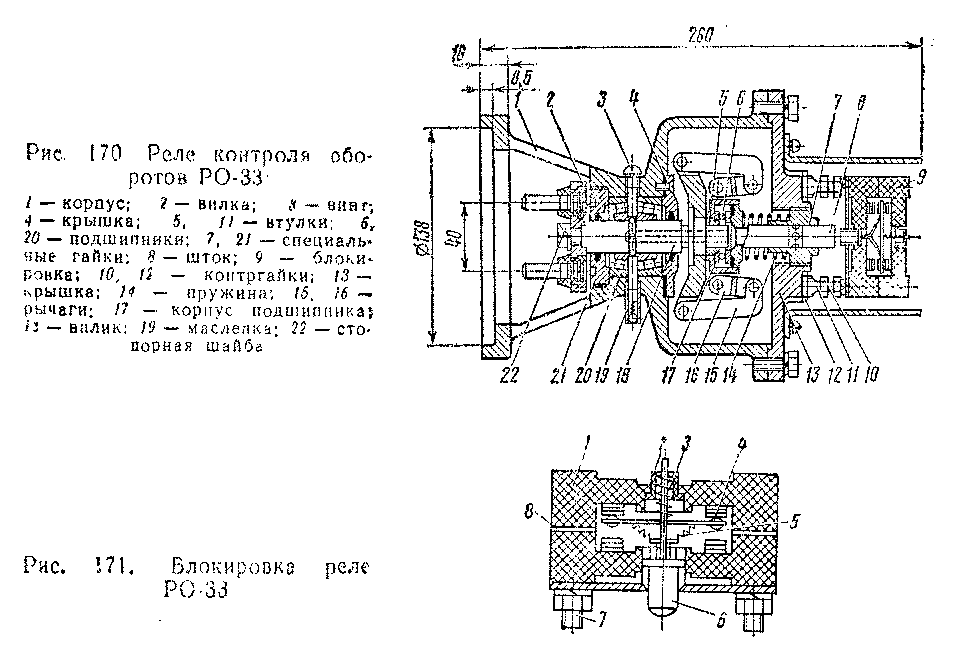
В схемах торможения противотоком асинхронных электродвигателей обширно используют индукционное реле контроля скорости. С валом электродвигателя, угловую скорость которого нужно держать под контролем, связывают входной вал реле 5, на котором установлен цилиндрический неизменный магнит 4.
При вращении электродвигателя поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке наводится ЭДС, величина которой пропорциональна угловой скорости вращения вала. Под ее воздействием в обмотке возникает ток и появляется сила взаимодействия, стремящаяся повернуть статор 6 в сторону вращения магнита.
При определенной частоте вращения сила растет так, что упор 2, преодолевая сопротивление плоской пружины, переключает контакты реле. Реле снабжено 2-мя контактными узлами: 1 и 7, которые переключаются зависимо от направления вращения.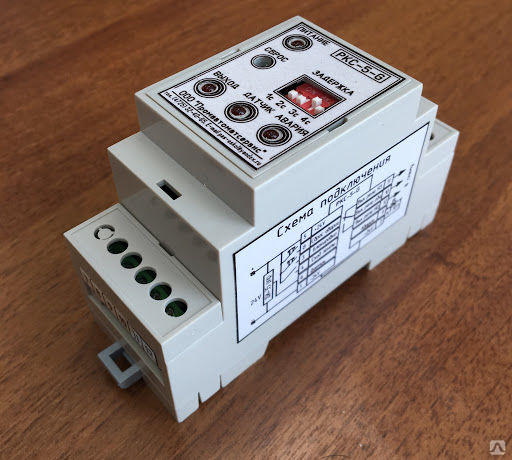
Набросок 1. Индукционное реле контроля скорости
Индукционное реле контроля скорости имеет достаточно сложную конструкцию и низкую точность, которая может быть применимой только для грубых систем управления. Более высочайшая точность контроля скорости может быть получена при помощи тахогенератора — измерительной микромашины, напряжение на зажимах которой прямо пропорционально скорости вращения.
Тахогенераторы употребляют в системах оборотной связи регулируемого привода с огромным спектром конфигурации скорости, и потому погрешность их составляет всего несколько процентов. Наибольшее распространение имеют тахогенераторы неизменного тока.
На рис. 2 показана схема реле контроля скорости электродвигателя М с применением тахогенератора G, в цепь якоря которого включено электрическое реле К и регулировочный реостат R. Когда напряжение на зажимах якоря тахогенератора превзойдет напряжение срабатывания, реле производит переключение во наружной цепи.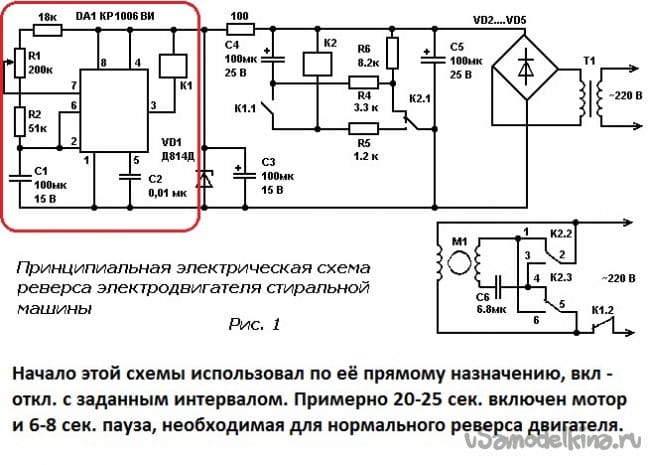
Набросок 2. Реле контроля скорости с тахогенератором
Набросок 3. Схема тахометрического моста
С повышением сопротивления цепи якоря точность работы схемы увеличивается. Потому время от времени реле подключают к тахогенератору через промежный полупроводниковый усилитель. Может быть также внедрение для этой цели полупроводниковых бесконтактных пороговых частей, владеющих размеренным напряжением срабатывания.
Надежность работы схемы может быть повышена, если тахогенератор неизменного тока поменять бесконтактным асинхронным тахогенератором.
Асинхронный тахогенератор имеет полый немагнитный ротор, выполненный в виде стакана. На статоре расположены две обмотки, находящиеся под углом 90° друг к другу. Одну из обмоток включают в сеть переменного тока. С другой обмотки снимают синусоидальное напряжение, пропорциональное частоте вращения ротора. Частота выходного напряжения всегда равна частоте сети.
В современных исполнительных электродвигателях неизменного тока тахогенератор встраивают в один корпус с машиной и устанавливают на одном валу с главным движком. Это уменьшает пульсации выходного напряжения и увеличивает точность регулирования скорости.
В электродвигателях серии ПБСТ обычно используют тахогенераторы неизменного тока типа ПТ-1 с электрическим возбуждением. Высокомоментные электродвигатели неизменного тока имеют интегрированный тахогенератор с возбуждением от неизменных магнитов.
В тех случаях, когда электродвигатель М неизменного тока тахогенератора не имеет, его скорость можно держать под контролем измеряя ЭДС якоря. Для этого употребляют схему тахометрического моста, который образован 2-мя резисторами: R1 и R2, якорем Rя и дополнительными полюсами машины Rдп. Выходное напряжение тахометрического моста Uвых = U1 — Uдп , либо
Uвых = (Rдп / Rдп + Rя) х Е = (Rдп / Rдп + Rя) х сω
Последнее равенство справедливо при условии всепостоянства магнитного потока электродвигателя. Включая на выходе тахометрического моста пороговый элемент, получают реле, настроенное на определенную угловую скорость вращения. Точность тахометрического моста невелика из-за непостоянства сопротивления щеточного контакта и нарушения равновесия при нагреве сопротивления.
Включая на выходе тахометрического моста пороговый элемент, получают реле, настроенное на определенную угловую скорость вращения. Точность тахометрического моста невелика из-за непостоянства сопротивления щеточного контакта и нарушения равновесия при нагреве сопротивления.
Если электродвигатель неизменного тока работает на искусственной характеристике и в цепь якоря включено огромное дополнительное сопротивление, функции реле скорости может выполнить реле напряжения, включенное на зажимы якоря.
Напряжение на якоре электродвигателя Uя = E + IяRя.
Так как Iя = (U — Е) / (Rя + Rдоб), получим Uя = (Rдоб / (Rя + Rдоб)) х Е + (Rя / (Rя + Rдоб)) х U, то вторым слагаемым можно пренебречь и считать напряжение на зажимах якоря прямо пропорциональным ЭДС и скорости вращения электродвигателя.
Набросок 4. Контроль скорости при помощи реле напряжения
Набросок 5. Центробежное реле контроля скорости
Очень ординарную конструкцию имеют центробежные реле скорости. Основанием реле служит пластмассовая планшайба 4, установленная на валу, скорость вращения которого нужно держать под контролем. На планшайбе закрепляются плоская пружина 3 с мощным подвижным контактом 2 и недвижный регулируемый контакт 1. Пружина выполнена из специальной стали, модуль упругости которой фактически не находится в зависимости от конфигурации температуры.
Основанием реле служит пластмассовая планшайба 4, установленная на валу, скорость вращения которого нужно держать под контролем. На планшайбе закрепляются плоская пружина 3 с мощным подвижным контактом 2 и недвижный регулируемый контакт 1. Пружина выполнена из специальной стали, модуль упругости которой фактически не находится в зависимости от конфигурации температуры.
При вращении планшайбы на подвижный контакт действует центробежная сила, которая при определенной скорости вращения преодолевает сопротивление плоской пружины и производит переключение контактов. Токоподвод к контактному узлу производят через контактные кольца и щетки, которые на рисунке не показаны. Такие реле употребляют в системах стабилизации скорости микродвигателей неизменного тока. Невзирая на свою простоту, система обеспечивает поддержание скорости с погрешностью порядка 2%.
Читайте также: компенсация за ЖКХ инвалидам 1 группы в 2019-2020 году (по нормам или по факту)
arduino — управление скоростью двигателя постоянного тока при изменении направления реле
спросил
Изменено 5 лет, 11 месяцев назад
Просмотрено 5к раз
\$\начало группы\$
Я создаю схему, которая управляет двигателем постоянного тока (24 В, 5 А) в обоих направлениях. (Не использую H-мост из-за мощного двигателя, по крайней мере, я не могу ничего найти в местном магазине).
Пока схема выглядит так:
(Не использую H-мост из-за мощного двигателя, по крайней мере, я не могу ничего найти в местном магазине).
Пока схема выглядит так:
Когда Arduino устанавливает контакты 7 и 8 в положение HI-LOW, двигатель получает одно направление. А когда LOW-HI наоборот. (Реле переключает отрицательный и положительный контакты)
Однако с помощью этого метода я не могу контролировать скорость двигателя. Я хотел бы заставить двигатель медленно увеличивать его скорость.
Я думаю использовать полевой МОП-транзистор и подключить его к выводу ШИМ на Arduino, этот метод работает только в одном направлении, но не в обратном.
Я заблудился, может кто-нибудь указать мне направление или дать мне ссылку, чтобы перейти. Заранее спасибо.
- Arduino
- микроконтроллер
- MOSFET
- мотор-контроллер
\$\конечная группа\$
1
\$\начало группы\$
Сначала создайте однонаправленный ШИМ-регулятор скорости, например такой:
смоделируйте эту схему — схема создана с помощью CircuitLab
справиться с приложенным напряжением и током.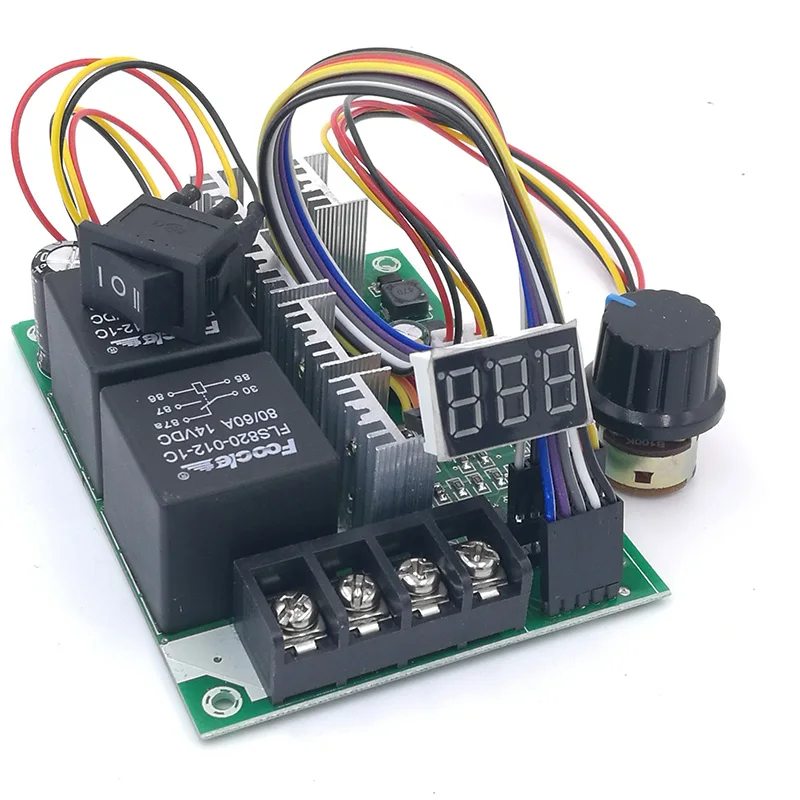
D1 — это быстродействующий диод Шоттки, предотвращающий выбросы высокого напряжения (вызванные магнитной энергией, накопленной в индуктивности двигателя), которые в противном случае могли бы разрушить полевой транзистор. Это также повышает эффективность за счет рециркуляции тока через двигатель, когда магнитное поле разрушается.
Чтобы изменить направление, вам просто нужно поменять местами провода двигателя, как вы это делали раньше. Контакты реле должны быть подключены между регулятором скорости и двигателем следующим образом:
имитация этой цепи
Двигатель движется вперед при срабатывании одного реле и назад при срабатывании другого реле. Когда оба реле отпущены, двигатель имеет короткое замыкание, поэтому он быстро останавливается и сопротивляется механическому вращению.
Перед переключением направления вы должны остановить двигатель, медленно уменьшая ШИМ до нуля, а затем отпуская оба реле. В противном случае он будет потреблять очень большой ток при реверсировании, потому что, продолжая вращаться в исходном направлении, он генерирует напряжение, которое добавляется к приложенному напряжению.
В противном случае он будет потреблять очень большой ток при реверсировании, потому что, продолжая вращаться в исходном направлении, он генерирует напряжение, которое добавляется к приложенному напряжению.
\$\конечная группа\$
2
\$\начало группы\$
Вы не можете управлять скоростью напрямую с помощью реле, потому что они механические и вы не можете переключать их на высокой скорости. У вас есть два решения: использовать H-мост или использовать реле для переключения направления и один транзистор для управления скоростью.
Имеются Н-мосты, управляющие двигателем 24В, 5А. Обычно их не найти в местном магазине. Если требуются компоненты локального хранилища, у вас есть возможность построить собственный H-мост с дискретными компонентами. Более сложной частью обычно будет верхняя сторона, так как ваш Arduino не более 0-5 В, а ваш двигатель 24 В, а P-MOSFET труднее найти в больших усилителях, но обычно вы можете решить это с помощью оптопар. Кстати, тебе обычно в любом случае хочет изолировать с помощью оптронов. Также не забудьте правильно рассчитать требования к управлению, потому что Arduino может не справиться с емкостями тока затвора. Самая нижняя схема в этой теме выглядит как хорошая отправная точка.
Кстати, тебе обычно в любом случае хочет изолировать с помощью оптронов. Также не забудьте правильно рассчитать требования к управлению, потому что Arduino может не справиться с емкостями тока затвора. Самая нижняя схема в этой теме выглядит как хорошая отправная точка.
Поскольку у вас уже есть работающие релейные переключатели, может быть проще выбрать второй вариант. Для этого самый простой способ — использовать N-канальный полевой МОП-транзистор между «землей» реле и фактической землей. Не забудьте также правильно рассчитать требования к вождению. Поскольку вы не предоставили реальных схем, трудно дать лучший совет, но схема с этой страницы выглядит хорошо (воспроизведена для полноты):
Вы можете заменить реле DPDT на то, что у вас уже есть, а TIP120 на более мощный MOSFET.
\$\конечная группа\$
2
\$\начало группы\$
Привод mosfet PWM и реле не должны быть проблемой, если
- ваш двигатель меняет направление при изменении полярности; существуют только однонаправленные двигатели, у которых нет постоянных магнитов, но есть катушка намагничивания.

- вы хорошо подумали, что произойдет, если вы измените направление на полной скорости
- вы добавили несколько искрогасителей, чтобы ваши реле жили дольше. Такой большой двигатель имеет значительную паразитную индуктивность, которая вызывает искрение в переключателях размыкающего реле. См. приложение:
- вы знаете, что двигатель может потреблять во много раз больше тока при запуске по сравнению с установившейся работой.
Дополнение по искрогашению:
Если снять провод постоянного тока с работающего двигателя, то видна искра. Это характерно для сильно индуктивных деталей, таких как реле, двигатели, электромагниты и т. д. Искра возникает за счет индукции. В катушках, которые подключены к напряжению постоянного тока, это означает, что ток катушки никогда не начинается и не прекращается в нулевое время, это происходит только постепенно. Когда провод питания постоянного тока снимается, ток все еще продолжается и постепенно ухудшается, пока вся магнитная энергия не рассеется. . Течение выбирает тот путь, который легче всего ломается. Часто это воздух и то, что мы видим как искру.
. Течение выбирает тот путь, который легче всего ломается. Часто это воздух и то, что мы видим как искру.
Подавить искру, облегчив индуктивному скачку. Возьмите два стабилитрона более 12 В, скажем, по 15 В каждый. Соедините их последовательно, но в противоположных направлениях. Подключите этот двойной стабилитрон параллельно двигателю. Он не закорачивает источник питания 12 В, потому что для любого тока требуется 15 В. Но ваше реле не подвергается сварке, когда контакт размыкается, потому что индуктивный пиковый ток теряется в стабилитроне.
Принято дополнительное примечание:
Также можно использовать индуктивный ограничитель тока. Когда на работающий двигатель внезапно подается обратное напряжение, ток питания резко возрастает. Катушка индуктивности на источнике питания ограничит мгновенный всплеск тока, и это будет менее вредным для источника питания.
\$\конечная группа\$
2
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
ток — двигатель постоянного тока и реле последовательно друг с другом
Прежде всего, спасибо за любые комментарии или ответы, я довольно много читал здесь, и это мне очень помогло, что очень ценно.
Во-вторых, извиняюсь, если допустил очевидные/глупые ошибки. Я только около 4 недель играю с электроникой, и мне даже пришлось напомнить себе, что такое закон Ома в начале!
Я пытаюсь спроектировать сигнальную систему для модели железной дороги, что является довольно тривиальной задачей, за исключением того, что я действительно не хочу питать поезда от батареи. Таким образом, в то время как все последующие логические схемы довольно просты с реле, питающимися от хорошего источника постоянного тока 12 В, рельсовая цепь, которая обнаруживает присутствие поезда, а также обеспечивает питание двигателя, сбивает меня с толку.
На приведенной ниже схеме очень просто то, что у меня есть на данный момент. ..
..
Я не был уверен, что проще для двигателя постоянного тока, поэтому я соединил индуктор и переменный резистор параллельно.
Кнопочные выключатели здесь просто представляют собой колеса поезда, поэтому они всегда оба закрыты или оба открыты.
Реле представляет собой реле Omron G2R-2, 12 В постоянного тока с сопротивлением катушки 275 Ом.
Двигатель 6 В, 0,5 А (в любом случае, это текущий план). Этот… http://www.nigellawton009.com/6VMicroMotors.html
И я намерен управлять им через Radio Control с помощью RX45d-v5, найденного здесь: http://www.micronradiocontrol.co.uk/rx_dt_land_v5.html#dt_rx45_v5
Итак, мои вопросы.. ,
-
Не мог бы кто-нибудь указать мне в направлении хорошего учебного ресурса для двигателей постоянного тока? Я изо всех сил пытаюсь найти достойную информацию о том, что производитель не превозносит достоинства своего конкретного бренда.
-
Когда на двигателе указано «6 В — 0,5 А», обычно это пиковый ток? т.
 е. гарантирует ли он, что пусковой ток при запуске не превысит значение 0,5 А?
е. гарантирует ли он, что пусковой ток при запуске не превысит значение 0,5 А? -
Я предполагаю, что 6 В двигателя является максимальным значением, а контроллер фактически представляет собой очень сложный переменный резистор для управления скоростью двигателя путем управления напряжением на двигателе. Я понял это неправильно? Мое намерение состояло в том, чтобы обратный диод над реле был стабилитроном на 12 В и имел источник питания на 18 В, чтобы оставить 6 В для двигателя. Нужен ли мне еще один последовательный резистор (R1) или контроллеры двигателей имеют тенденцию обрабатывать это внутри, потребляя постоянное напряжение 6 В и питая двигатель только тем, что требуется?
Поскольку двигатель рассчитан на 0,5 ампера, мне, очевидно, нужно найти место, куда этот ток пойдет. Я не слишком беспокоюсь о том, чтобы потратить дополнительные средства на резисторы большей мощности или что-то подобное, и цепь будет замкнута только примерно в 5% случаев. Так что достаточно времени, чтобы вещи остыли между активациями. Однако я, очевидно, стремлюсь ничего не ломать.
Однако я, очевидно, стремлюсь ничего не ломать.
Реле рассчитано на 0,43А, но это только то, что оно нормально потребляет? то есть 12/275? Сможет ли он справиться с дополнительной силовой нагрузкой через него и возможно ли это вообще физически, если я зафиксировал напряжение на 12В стабилитроном, а катушка статическая 275 Ом?
У меня есть стабилитроны 1N5349B — 5 Вт — максимальный ток 395 мА. Лист данных ниже:
Честно говоря, я понятия не имею, как их читать.
- Говорит ли это о том, что при 12 В диод начнет проводить в обратном направлении и начнет работать при приблизительно 1 мА и сопротивлении 2,5 Ом, а затем, по мере увеличения тока, он будет стабилен до 395 мА, и в этот момент диод будет иметь сопротивление 125 Ом, а затем любой больший ток заставит его лопнуть? на мой взгляд 395 мА при 125 Ом составляет 49 В, так что я предполагаю, что здесь что-то упустил?
В каком случае очень просто добавить резистор параллельно катушке реле, чтобы снять дополнительный ток, который не может пройти через комбинацию катушки и диода?
- Там, где я планирую использовать 18–12 В на реле и 6 В на двигателе (если это окажется правильным), будет ли разумно использовать более высокое напряжение питания и добавить токоограничивающий резистор? то есть питание 24 В, 12 В на реле, 6 В на двигателе и 6 В на резисторе 6 Вт, 24 Ом, чтобы ток оставался на уровне 0,5 А и не выше.

