Что такое промышленные роботы-манипуляторы. Какие бывают виды промышленных роботов. Для чего используются роботы в производстве. Каковы преимущества внедрения робототехники на предприятиях.
Что такое промышленный робот-манипулятор
Промышленный робот-манипулятор — это автоматическое устройство, состоящее из манипулятора с несколькими степенями подвижности и перепрограммируемого устройства управления для выполнения двигательных и управляющих функций в производственном процессе. Основное назначение промышленных роботов — замена человека при выполнении основных и вспомогательных технологических операций в промышленности.
Ключевые характеристики промышленных роботов-манипуляторов:
- Автоматическое функционирование
- Возможность перепрограммирования для выполнения различных задач
- Наличие нескольких степеней подвижности (от 3 до 7 осей)
- Способность манипулировать объектами, инструментами, заготовками
- Высокая точность и повторяемость движений
Основные виды промышленных роботов
Промышленные роботы классифицируются по нескольким основным признакам:
По количеству степеней подвижности:
- 3-осевые
- 4-осевые
- 5-осевые
- 6-осевые
- 7-осевые
По грузоподъемности:
- Сверхлегкие (до 1 кг)
- Легкие (до 10 кг)
- Средние (10-100 кг)
- Тяжелые (100-1000 кг)
- Сверхтяжелые (свыше 1000 кг)
По типу кинематической схемы:
- Декартовые (линейные)
- Цилиндрические
- Сферические
- Ангулярные (антропоморфные)
- SCARA
- Параллельной структуры (дельта-роботы)
Области применения промышленных роботов
Промышленные роботы-манипуляторы нашли широкое применение в различных отраслях производства:
- Автомобилестроение
- Машиностроение
- Металлообработка
- Электроника
- Химическая промышленность
- Пищевая промышленность
- Фармацевтика
- Легкая промышленность
Основные технологические операции, выполняемые роботами:
- Сварка
- Окраска
- Сборка
- Паллетирование
- Упаковка
- Фрезерование
- Шлифование
- Полировка
- Перемещение заготовок и деталей
Преимущества внедрения промышленных роботов
Использование робототехники в производстве дает ряд существенных преимуществ:
- Повышение производительности труда
- Улучшение качества продукции
- Снижение брака
- Возможность круглосуточной работы
- Исключение влияния человеческого фактора
- Повышение безопасности труда
- Экономия производственных площадей
- Быстрая переналадка на новые изделия
- Сокращение производственного цикла
Шарнирные роботы — самый распространенный тип
Шарнирные роботы являются наиболее универсальным и распространенным типом промышленных роботов. Их ключевые особенности:

- Конструкция из нескольких звеньев, соединенных шарнирно
- От 3 до 7 степеней подвижности
- Способность совершать сложные пространственные движения
- Большая рабочая зона
- Высокая точность позиционирования
Шарнирные роботы эффективно применяются для следующих задач:
- Сварка
- Сборка
- Укладка на поддоны
- Перемещение деталей
- Фрезерование
- Шлифование
- Окраска
Роботы Delta для высокоскоростных операций
Роботы Delta имеют параллельную кинематическую структуру и предназначены для сверхбыстрых операций. Их ключевые характеристики:
- Конструкция из 3-4 параллельных кинематических цепей
- Легкая конструкция с высокой жесткостью
- Сверхвысокие скорости и ускорения
- Компактная рабочая зона
- Грузоподъемность до 8 кг
Области применения Delta-роботов:
- Высокоскоростная сортировка
- Упаковка
- Перекладка мелких изделий
- Сборка электронных компонентов
- Инспекция продукции
Коллаборативные роботы для совместной работы с человеком
Коллаборативные роботы (коботы) — новый класс роботов, способных безопасно работать рядом с человеком. Их особенности:

- Легкая конструкция
- Округлые формы без острых углов
- Ограничение усилий и скоростей
- Наличие сенсоров для обнаружения контакта
- Простота программирования
Коллаборативные роботы применяются для:
- Мелкосерийной сборки
- Контроля качества
- Упаковки
- Обслуживания станков
- Лабораторных исследований
Роботизированные технологические комплексы
Для решения комплексных производственных задач создаются роботизированные технологические комплексы (РТК), включающие:
- Промышленные роботы
- Технологическое оборудование
- Транспортно-накопительные устройства
- Системы управления
- Вспомогательные устройства
РТК позволяют автоматизировать целые участки и линии, обеспечивая высокую производительность при минимальном участии человека.
Перспективы развития промышленной робототехники
Основные тенденции в развитии промышленных роботов:
- Повышение точности и скорости работы
- Увеличение числа степеней свободы
- Расширение функциональных возможностей
- Интеграция систем машинного зрения
- Развитие коллаборативных технологий
- Упрощение программирования и обучения
- Снижение стоимости роботов
Промышленные роботы становятся все более доступными и эффективными, что способствует дальнейшему росту автоматизации производства во всех отраслях.

Промышленный робот — разновидности и их внедрение на производство
Промышленный робот — разновидности и их внедрение на производство СтатьиОценить мой проект
Заказать сервис
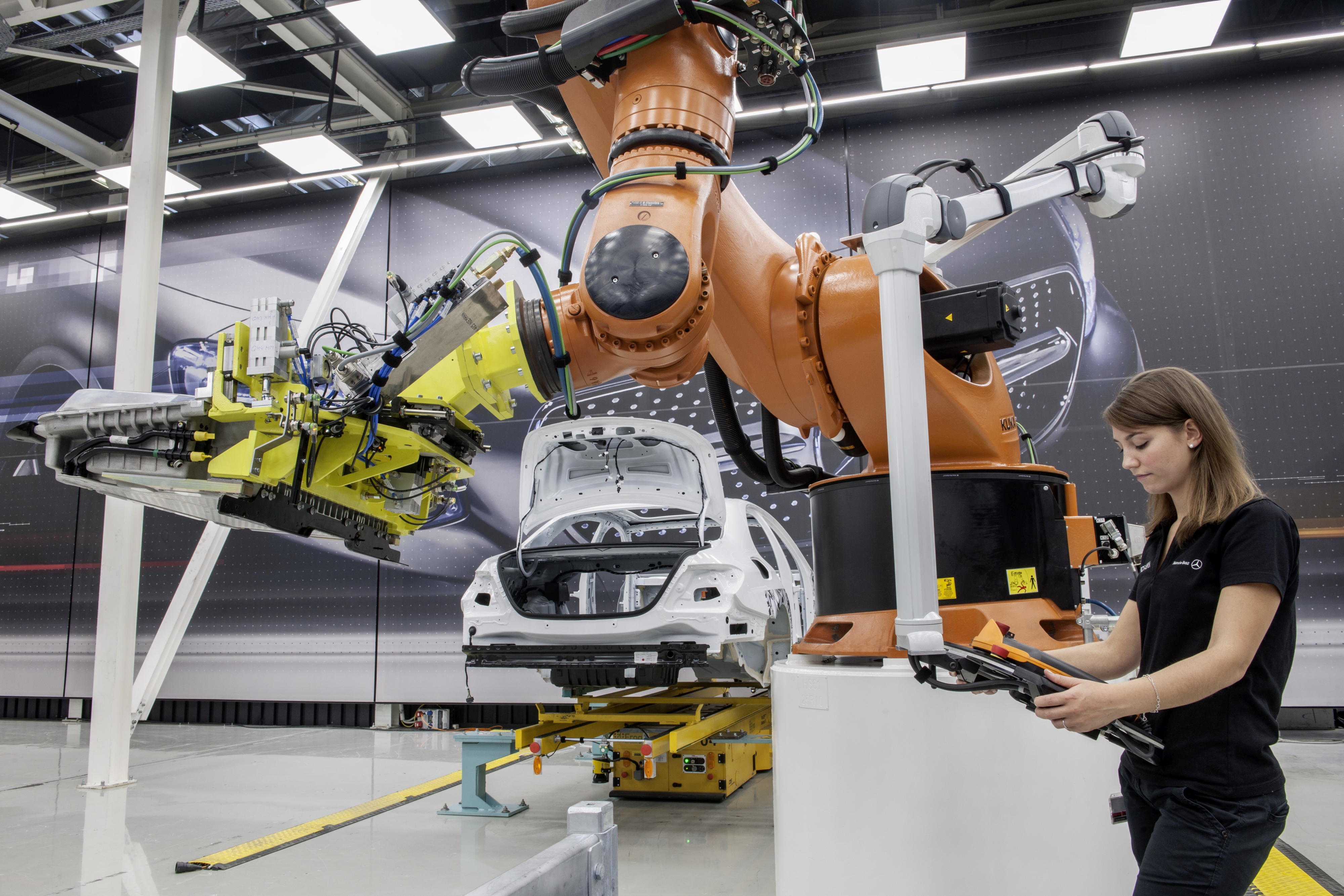
Один из наиболее востребованных вариантов промышленного оборудования — робот-манипулятор. Эти машины управляются дистанционно и являются неотъемлемым элементом многих технологических процессов, особенно тех, что опасны для человека или вредны для здоровья. Наиболее эффективны промышленные роботы-манипуляторы в составе автоматизированных производственных систем. Их использование позволяет повысить уровень качества и увеличить производительность выполняемых работ. Отличный выбор такого оборудования предлагает компания «ДС-Роботикс» в нашем каталоге.
Особенности и разновидности манипуляторов
Промышленные роботы-манипуляторы этого типа относятся к профессиональному оборудованию. Их конструкция позволяет имитировать движение руки человека. Отличительной чертой подобных устройств является их способность выполнять задачи, которые являются физически невозможными для человека.
Отличительной чертой подобных устройств является их способность выполнять задачи, которые являются физически невозможными для человека.
Разработаны такие приспособления специально для модернизации производств и повышения экономической отдачи от них. Ещё одна причина роста их популярности — снижение или даже полное исключение производственных травм. При этом непосредственное присутствие человека при выполнении операций не требуется. Работники предприятия могут удалённо управлять роботом.
Главное различие между такими устройствами заключается в дополнительном навесном оборудовании. В зависимости от сферы использования и технического задания, промышленный робот-манипулятор может быть оснащён следующими механизмами:
- захватами различных типов;
- сварочной головкой;
- фрезой;
- лазерным сканером и пр.
Преимущества промышленного робота-манипулятора
Преимущества использования оборудования данного типа очевидны: существенно повышается точность выполняемых операций, возрастает их безопасность, снижается количество брака.
Компания «ДС-Роботикс» рекомендует вам внедрить на своём предприятии эти дистанционно управляемые машины. Они являются незаменимыми помощниками во многих сферах промышленности. Благодаря их внедрению вы сможете повысить конкурентоспособность и сделать свой бизнес ещё более успешным. Наша компания занимается внедрением роботов от ведущих производителей — компаний Kuka и ABB — их роботы уже зарекомендовали себя как надежные помошники в любой отрасли промышленности.
Чтобы заменить человека на производстве, нужна его усовершенствованная копия – к такому выводу пришли инженеры, впервые создавшие робототехнику. Однажды это открытие стало настоящим техническим прорывом, а сегодня используется предприятиями едва ли не во всех отраслях производства.
Промышленный манипулятор – это тип робота, который по внешнему исполнению, функционалу подобен человеческой руке. Он может работать как самостоятельное устройство или являться составным элементом роботизированного комплекса. Он управляется дистанционно, сводя к минимуму вовлеченность специалистов в физически сложную, монотонную механическую работу.
ДС-РОБОТИКС предлагает широкий выбор производственных роботов манипуляторов? с которым можно ознакомиться в каталоге.
Устройство робота-манипулятораРоботизированная рука управляется при помощи программного обеспечения. Конструкция не подразумевает наличия гидравлики или пневматики – все процессы построены на электромеханике.
В структуру входит ряд компонентов.
- Рабочий орган – устройство, выполняющее технологические операции, воздействующее на объект манипулирования. Это инструмент (фреза, сварочная головка, лазерный сканер) или захватное устройство.
- Опорные конструкции – элементы, обеспечивающие прочность, жесткость фиксации.
 В зависимости от специфики робота, несущие конструкции могут представлять собой стойки, колонны или другие решения.
В зависимости от специфики робота, несущие конструкции могут представлять собой стойки, колонны или другие решения. - Манипуляционная система – это сложный механизм с разомкнутой кинематической цепью, состоящий из большого количества звеньев. Служит для пространственной ориентации рабочего органа, его переноса к точке работы.
- Привод – компонент, который преобразует энергию в механическое движение. Действует согласно параметрам, заданным при помощи программного обеспечения. Привод, в свою очередь, состоит из энергоустановки, двигателей, передаточных механизмов.
- Система программного управления – это «ядро» автоматизированного помощника, позволяющее машине самостоятельно выполнять задачи без непосредственного участия человека. При помощи программирования оператор формирует управляющие сигналы, которые запускают выполнение операций.
Система состоит из следующих элементов:
- пульта управления;
- запоминающего устройства; вычислительного устройства;
- блоков управления приводами манипулятора;
- технологического оборудования.

Разновидности роботов-манипуляторов
Классифицируют их по широкому диапазону признаков. Приведем основные из них.
- По количеству осей:
- 4-осевые – применяются для фасовки и укладки продукции;
- 6-осевые – используются для прочих операций.
2. По степени подвижности: от 2 до 6 уровня. Чем выше параметр, тем более точно робот-манипулятор производит наклоны, сжатие, вращение – другими словами, имитирует движение человеческой руки.
3. По типу операций:
- универсальные – выполняют основные, а также вспомогательные задачи, робота можно быстро переориентировать на новый вид работы;
- подъемно-транспортные – перемещают объекты в пространстве;
- производственные – выполняют конкретные технологические задачи: покраску, сварку, резку, сортировку, сверление, гибку.
- По грузоподъемности:
- легкие – до 10 кг;
- средней грузоподъемности – до 200 кг;
- тяжелые – до 1 тонны;
- сверхтяжелые – более 1 тонны.

Автоматизированные устройства помогают повысить эффективность предприятий в различных сферах: металлургии, автомобилестроении, химической, пищевой, легкой промышленности – это далеко не все направления.
На мировом рынке существует большой выбор роботизированных комплексов. Новые технологии становятся все более доступными также для малого и среднего бизнеса. Приобретение промышленного манипулятора – это не расход, а инвестиция! Сферы применения в производстве разнообразны.
Почему стоит купить робота-манипулятора
Внедрение роботизированного манипулятора позволяет тысячам предприятий решать несколько важнейших задач:
- увеличивать объем выпуска продукции;
- повышать качество выпускаемых изделий, продуктов;
- сокращать производственный цикл за счет способности работать круглосуточно;
- освобождать сотрудников от выполнения физически обременительных и опасных для здоровья операций;
- автоматизировать монотонную работу.

ДС-РОБОТИКС уже много лет сотрудничает с лучшими компаниями, которые занимаются проектированием – это европейские производители KUKA, ABB. Купить манипулятор, подходящий для производства — легко, оставьте заявку, и мы свяжемся с вами.
Современные роботокомплексы, с одной стороны, представляют собой сложные высокотехнологичные системы, а с другой, они просты в эксплуатации. Не нужно быть программистом, чтобы научиться ставить перед машиной производственные задачи. Более того, многие управляются голосом! Всю самую сложную работу берем на себя: наши инженеры полностью подготовят машины к использованию, так что вашим сотрудникам останется задавать простые алгоритмы и контролировать качество работы.
Каждый клиент задается вопросом сколько стоит промышленный робот с установкой и обучением сотрудников, ответить сразу на этот вопрос невозможно. Необходимо учесть, что цена уникальна для каждого производства. Просто сообщите ДС-РОБОТИКС, какое оборудование вам необходимо, и мы подскажем выгодное решение. Наши специалисты сопровождают каждый проект от поступления заявки до внедрения оборудования в работу производственного комплекса. Мы научим ваших сотрудников работать с новой техникой и обеспечим сервисное обслуживание.
Наши специалисты сопровождают каждый проект от поступления заявки до внедрения оборудования в работу производственного комплекса. Мы научим ваших сотрудников работать с новой техникой и обеспечим сервисное обслуживание.
Запрос на обратную связь
Укажите Ваше имя и телефон.
Мы с Вами обязательно свяжемся.
Ваше имя *
Телефон *
* обязательные поля
Согласие на обработку персональных данных в соответствии с Пользовательским соглашением
Спасибо за Ваше обращение!
Наши менеджеры обязательно свяжутся с Вами.
Каталог промышленных роботов
см. также Коллаборативные роботы
Российские роботы
ARKODIM, «Торговый дом «Аркодим», Татарстан
Промышленные линейные роботы-манипуляторы ARKODIM
GRINIK, GRINIK Robotics (ООО «АвангардПЛАСТ»), Новосибирск
Разработка, собственное производство и продажа промышленных роботов GRINIK
PSX, SMITEK (ООО Смайтек), Россия
Портальный робот обеспечивающий высокоточное позиционирование технологического средства (сварочного аппарата, гидроабразивной резки, лазерного датчика) по 5 координатам в пространстве.
«Эйдос-Медицина» в 2018 году ведет разработку промышленного шестиосевого робота. / 2018.05.04 business-gazeta.ru
Зарубежные роботы
Arcsystem, Yaskawa, Япония
Сварочный комплекс. Один или два манипулятора и ограждение. Комплекс может выпускаться в одной из 600 комбинаций рабочих инструментов, треков для перемещения и основаниями.
Baxter, Rethink Robotics, США
промышленный робот, 2 руки. Разработан в 2012 году. К середине 2015 года продано менее 1000 роботов. В качестве недостатка отмечается низкая скорость работы робота.
BRAVO, TAL, Индия
первый промышленный робот (5-осевой) разработанный и собираемый в Индии.
2017.04.30 Первый промышленный робот Made in India.
Comau Smart SiX 6-1.4
CR-35iA, Fanuc, Япония
Коллаборативный промышленный манипулятор с уникальной для таких систем грузоподъемностью до 35 кг.
FoxBot, Foxconn, Тайвань
2016.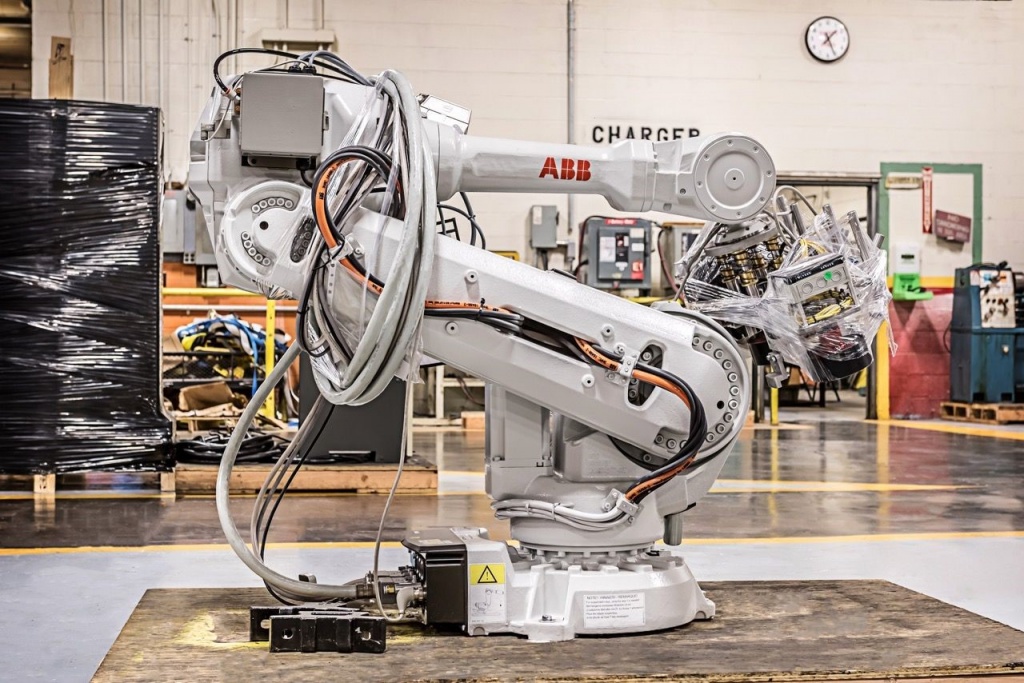 10 На предприятиях Foxconn Group установлено уже 40 тысяч роботов FoxBot. Ежегодно выпускается около 10 000 роботов. Большую часть компонентов для них (кроме приводов и редукторов), Foxconn выпускает самостоятельно, включая контроллеры и ПО.
10 На предприятиях Foxconn Group установлено уже 40 тысяч роботов FoxBot. Ежегодно выпускается около 10 000 роботов. Большую часть компонентов для них (кроме приводов и редукторов), Foxconn выпускает самостоятельно, включая контроллеры и ПО.
В 2015.04 Foxconn поставила три первых робота в лапшичные Dazzing Noodles в Китае, где они выполняют функции приготовления пищи, включая извлечение готовой лапши из горячей воды. 2015.05.05 Роботы Foxconn начали готовить лапшу.
Franka, Franka Emika, Германия
Манипулятор коллаборативного типа, разработанный стартапом. Предназначен для позиционирования инструментов, может выполнять сверлильные и сборочные операции. Использует тензодатчики и системы управления крутящим моментом. Поставки намечены на 2017 год. Программирование модульного типа или путем задания траектории движением манипулятора. Успешные операции можно сохранять в облаке. 7 степеней свободы. Точность до 0.1 мм. Длина — до 80 см с объектом до 3 кг. Ориентировочная стоимость $10 тыс.
2017.01.13 Franka Emika — бюджетный «умный» коллаборативный робот.
Hyundai YS100, Hyundai, Южная Корея
IRB 1100, ABB Robotics, Европа
6-осевой промышленный робот с грузоподъемностью 4 кг (радиусы действия 475 мм и 580 мм). Анонсирован в октябре 2018 года, доступность для заказов — с декабря 2018 года. В декабре 2019 показан с новым контроллером OmniCore C90XT для жестких условий эксплуатации.
2019.12.21 ABB запустил IRB 1100 с новым контроллером OmniCore C90XT для жестких условий эксплуатации — видео.
2018.10.12 ABB представляет IRB 1100 — своего самого компактного и легкого 6-осевого робота.
IRB 6640-2352.55, ABB Robotics, Европа
Используется, например, в составе роботизированной моечной машины FlexWasher, включающая камеру предварительной промывки, основную камеру с роботом IRB 6640-2352.55, сушильную камеру, станцию очистки и фильтрации воды.
2015.08.18 ABB оснастила моечными машинами FlexWasher завод Ford Sollers в Елабуге
KUKA KR 5 arc
промышленный робот для работы с легкими грузами
KR 5-2 arc HW, KUKA
промышленный робот для работы с легкими грузами
KR 6-2, KUKA
промышленный робот для работы с легкими грузами
КК 16-2, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 CR, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 F, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 KS-F, KUKA
промышленный робот для работы с легкими грузами
KR 16-3 S, KUKA
промышленный робот для работы с легкими грузами
KR 16 arc HW, KUKA
промышленный робот для работы с легкими грузами
KR 16 L6-2, KUKA
промышленный робот для работы с легкими грузами
KR 16 L6-2 KS, KUKA
промышленный робот
KR 30-3, KUKA
для работы с грузами до 30 кг, максимальная длина — 2033 мм
KR 30-3 CR, KUKA
промышленный робот
KR 30-3 F, KUKA
промышленный робот
KR 30-4 KS, KUKA
промышленный робот
KR-30-4 KS-F, KUKA
промышленный робот
KR-30 HA, KUKA
промышленный робот повышенной точности
KR 30 L16-2, KUKA
промышленный робот
KR 40 PA, KUKA
промышленный робот
KR 60-3, KUKA
промышленный робот
KR 60-3 F, KUKA
промышленный робот
KR 60-4 KS, KUKA
промышленный робот
KR 60-4 KS-F, KUKA
промышленный робот
KR 60 L16-2 KS, KUKA
промышленный робот
KR 60 HA, KUKA
промышленный робот
LaserSnake2, OC Robotics, Объединенное Королевство
Роботизированный манипулятор с точным позиционированием по всем степеням свободы, оснащенный мощным лазерным резаком с оптической фокусировкой для резки любого материала. Управляется дистанционно. Проект разрабатывался с 2013 года, испытан в 2016 году.
Управляется дистанционно. Проект разрабатывался с 2013 года, испытан в 2016 году.
LBR iiwa 7 R800, KUKA Robotics, Германия
Коллаборативный робот с сенсорной системой распознавания
2015.05 Робот помощник археолога был представлен на международной выставке в мае 2015 года. Выполненый на основе промышленного робота — манипулятора KUKA LBR iiwa, помощник археолога способен снимать грунт и проводить очистку окаменелостей, склейку деталей, выемку фрагментов. Среди достоинств робота — способность неутомимо совершать мельчайшие движения кистями и скребками в круглосуточном режиме. Робот также умеет фотографировать все участки фрагмента в HD-формате, фиксировать изменения, проводить радиоуглеродный анализ. 2015.08.07 Роботы-археологи: железная рука помощи
LBR iiwa 14 R820, KUKA Robotics, Германия
Коллаборативный робот с сенсорной системой распознавания
LR Mate-200, Fanuc, Япония
72 см. Для работы с грузами до 1 кг.
LS3-B, Epson, Япония
SCARA робот, нагрузка до 3 кг. Анонс в апреле 2019.
LS6-B, Epson, Япония
SCARA робот, нагрузка до 6 кг. Анонс в апреле 2019.
LS10-B, Epson, Япония
SCARA робот, нагрузка до 10 кг. Анонс в апреле 2019.
LS20-B, Epson, Япония
SCARA робот, нагрузка до 20 кг. Анонс в апреле 2019.
M-710, Fanuc, Япония
Серия легковесных роботов для работы с грузами от 20 до 70 кг. Компактное запястье, жесткая конструкция руки, узкая база и зона досягаемости до 3.1 м. Высокие угловые скорости, хорошие инерционные показатели.
M-2000iA/1700L, Fanuc, Япония
2015.06.11 FANUC, японский производитель роботов и систем автоматизации, заявила о создании самого мощного в мире промышленного робота, способном поднимать 1.7 тонн. Максимальный вынос руки составляет 4.7 метров. Робот обладает 6-ю осями свободы, сильными «запястьями», обеспечивающими надежное функционирование и высокую точность движений. Робота представят в октябре 2015 года на выставке EMO в Милане. Видео по ссылке.
Робота представят в октябре 2015 года на выставке EMO в Милане. Видео по ссылке.
Motoman MH-24, Yaskawa Electric, Япония
2015.06.03 Промышленный робот Motoman MH-24 демонстрирует владение катаной. Видео на Youtube.
MXE350L, Kawasaki
Промышленный робот, рассчитанный на высокие нагрузки.
NextAge, Kawada Industries, Inc.
Кооперативный робот с двумя манипуляторами, коммерчески доступен с 2009 года. Официальный сайт: global.kawada.jp
2015.07.07 Использование кооперативных роботов набирает обороты в Японии.
Roberta, ABB Robotics, Европа
Перспективная коллаборативная система.
Sawyer, Rethink Robotics, США
Коллаборативный промышленный робот. Развитие идей Baxter, но может работать быстрее и точнее. В коммерческой доступности с 2015.09
Sensabot, NREC, США
Телеуправляемая роботизированная платформа для наблюдения за промышленными объектами, особенно во взрывоопасных или агрессивных средах.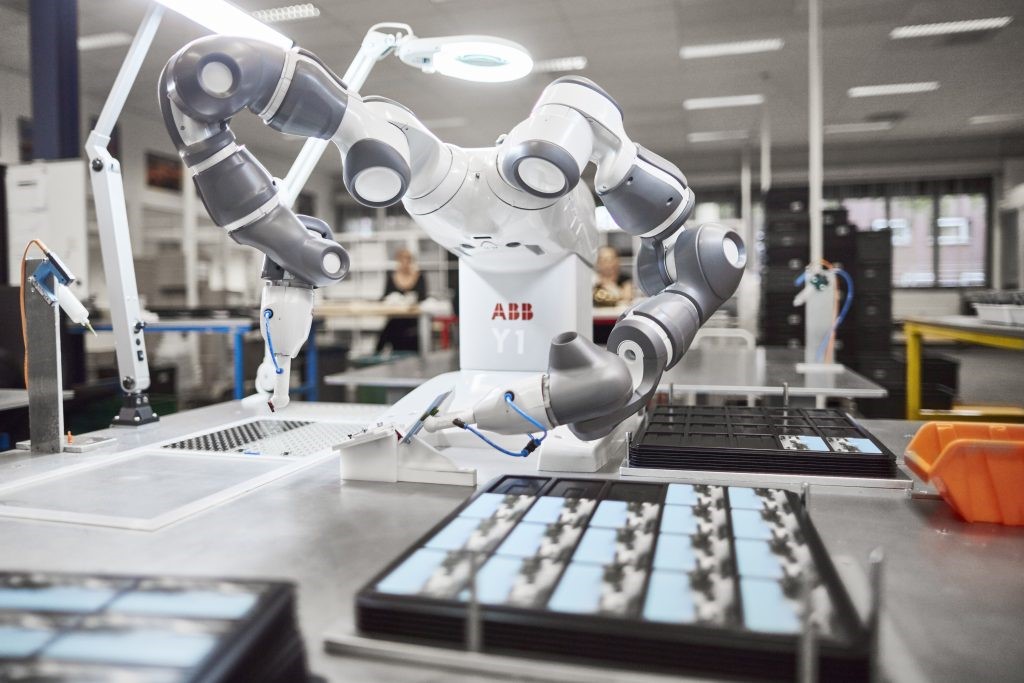
uArm Swift, UFACTORY
Настольный робоманипулятор с 4DOF, полезной нагрузкой до 0.5 кг. Встроенный порт, пакет управления по блочной схеме, работает автономно без подключения к ПК или с ПК. Повторяемость до 5 мм.
2017.02.11 uArm Swift и uArm Swift Pro — настольные мини-манипуляторы для «домашнего» применения
uArm Swift Pro, UFACTORY
Настольный робоманипулятор с 4DOF, полезной нагрузкой до 0.5 кг. Встроенный порт, пакет управления по блочной схеме, работает автономно без подключения к ПК или с ПК. Повторяемость до 0.2 мм.
2017.02.11 uArm Swift и uArm Swift Pro — настольные мини-манипуляторы для «домашнего» применения
Unix 410S, Japan Unix
Паяльные роботы серии 410S.
2015.10.05 В Мексике покажут настольные паяльные роботы серии 410S компании Japan Unix
UR10, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 10 кг (22 фунта)
UR5, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 5 кг (11 фунтов)
Способен работать с весом до 5 кг (11 фунтов)
UR3, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 3 кг (6.5. фунтов)
VT6L, Epson, Япония
6-осевой манипулятор VT6L, досягаемость до 900 мм с грузом до 6 кг. Манипулятор начального уровня. Ориентир цены — $13900. Анонс в апреле 2019.
xArm, UFactory, Китай
Коллаборативный робот, модели xArm 5 Lite, xArm 6, xArm 7
2018.10.24 xArm — рука, протянутая малому бизнесу
YuMi, ABB Robotics, Европа
2 манипулятора.
Поиск Роботы FANUC по сериям
Готовы начать свое путешествие по автоматизации? Есть вопросы, прежде чем начать? Мы здесь, чтобы помочь.
Заполните форму ниже, и опытный эксперт по автоматизации FANUC свяжется с вами.
Для чего используются шарнирные роботы?
Шарнирные роботы являются наиболее распространенным типом роботов. «Сочлененный» — это термин, обозначающий способ движения осей и суставов. Оси и суставы обычно разрабатываются так, чтобы сдерживать движение в оболочке рабочего пространства. При рассмотрении этих типов роботов вы также можете найти модели, предназначенные для работы бок о бок с людьми, использующие шарнирное сочленение для безопасной работы, не сталкиваясь с людьми или другими механизмами. Прокрутите до серии Collaborative, чтобы увидеть наших шарнирных роботов, разработанных для безопасной работы в одном рабочем пространстве с людьми.
«Сочлененный» — это термин, обозначающий способ движения осей и суставов. Оси и суставы обычно разрабатываются так, чтобы сдерживать движение в оболочке рабочего пространства. При рассмотрении этих типов роботов вы также можете найти модели, предназначенные для работы бок о бок с людьми, использующие шарнирное сочленение для безопасной работы, не сталкиваясь с людьми или другими механизмами. Прокрутите до серии Collaborative, чтобы увидеть наших шарнирных роботов, разработанных для безопасной работы в одном рабочем пространстве с людьми.
В шарнирной конструкции манипулятора робота используется ряд осей, начиная от моделей с 3 осями и заканчивая моделями с 7 осями. 6-осевой робот — одна из наиболее адаптируемых конфигураций шарнирных роботов. С 6 осями он может двигаться вперед и назад, вверх и вниз. Он также может рыскать, наклоняться и катиться, что приводит к сложному набору движений, которые могут имитировать движения человеческой руки. Это преимущество шарнирного робота позволяет ему делать такие вещи, как захват мелких предметов с полки и размещение их на конвейере. Такая же сложность делает шарнирных роботов отличным выбором для роботизированных упаковочных решений, укладки на поддоны и специальных приложений, таких как роботы для снятия заусенцев.
Такая же сложность делает шарнирных роботов отличным выбором для роботизированных упаковочных решений, укладки на поддоны и специальных приложений, таких как роботы для снятия заусенцев.
Преимущества шарнирных роботов включают большее количество степеней свободы (DOF), чем у других роботов, что делает их более универсальными. Интегрируя шарнирную конструкцию манипулятора робота в производственную линию, вы можете повысить свою производительность за счет увеличения скорости и повышения точности. Вы также улучшите качество и повысите гибкость, чтобы быстро адаптировать процесс к изменениям. Поскольку шарнирно-сочлененные роботизированные системы являются более распространенной частью производственного процесса, они также стали более доступными, что делает их жизнеспособным вариантом для малого и среднего бизнеса.
Роботы для сборки автомобилей могут включать шарнирных роботов, которые служат в качестве роботов для соединения материалов, роботов для нанесения покрытий и роботов для герметизации. Роботы могут быть частью линии и выполнять задачи независимо друг от друга, а могут работать совместно, чтобы помогать людям в производственном процессе.
Роботы могут быть частью линии и выполнять задачи независимо друг от друга, а могут работать совместно, чтобы помогать людям в производственном процессе.
Для чего используются роботы Delta?
Дельта-роботы — это роботы в форме зонтика, предназначенные для имитации движения руки. Однако этот робот очень быстрый, поэтому он может работать с гораздо большей точностью и скоростью, чем люди. Дельта-роботы, также известные как роботы с параллельным соединением или роботы-пауки, часто являются отличной альтернативой дорогим универсальным системам автоматизации.
В дельта-роботах двигатели закреплены внутри рамы, благодаря чему масса и сопротивление остаются над рабочим пространством и вдали от сверхлегких манипуляторов и инструментов на конце манипулятора. Роботы Delta обычно представляют собой роботов с легкой полезной нагрузкой и инструментами, которые могут включать захватный палец, вакуумную присоску, захватный рычаг или другое специальное приложение.
Из-за своей необычной конструкции дельта-роботы могут с исключительной ловкостью двигать руками в пределах своего рабочего пространства по осям x и y, но обычно с ограниченным движением по оси z. Их рабочая зона, как правило, более контролируемая и ограниченная, чем рабочая зона шарнирного робота. Дельта-роботам потребуется 4 или более осей для выполнения такой простой задачи, как перемещение предмета из мусорного ведра в коробку, или такой сложной, как захват бутылочек с таблетками или перемещение плоских предметов в положение стоя или другие типы переориентации деталей.
Исключительная ловкость роботов Delta делает их отличным выбором при выборе роботов для точной сборки, роботов для захвата и упаковки, а также роботов для захвата и размещения. Эти высокопроизводительные роботы часто являются хорошим выбором для роботизированных упаковочных решений. Добавление технологий машинного зрения позволяет этой серии роботов выполнять более сложные задачи, такие как размещение продуктов неправильной формы в коробчатых отсеках, например, перемещение продуктов питания в коробки.
Роботы Delta также подходят для использования на предприятиях, где действуют строгие правила охраны труда и техники безопасности. Их можно настроить в соответствии со стандартами производителей продуктов питания для промывки оборудования. Двигатели могут быть изолированы в корпусах, чтобы гарантировать, что продукты питания или фармацевтические продукты защищены от потенциальных загрязнителей, таких как смазочные материалы, фрагменты металла или пластика или пыль.
Дельта-роботы — удобный выбор для быстрого и последовательного выполнения повторяющихся задач. Это решение особенно полезно при замещении деятельности человека, которая вызывает умственную усталость или травмы от повторяющихся движений, такие как синдром запястного канала, боли в спине или тендинит.
Специальные роботы и серийные приложения
Поскольку промышленные роботы могут быть сконфигурированы таким образом, что они предлагают почти бесконечную функциональность, их удобно сортировать по нескольким рабочим группам, называемым роботами по сериям. Шарнирно-сочлененные роботы и дельта-роботы — два самых популярных робота по сериям. Поскольку вы рассматриваете робототехнику для своего производства или производственного предприятия, есть шесть дополнительных категорий роботов по сериям для изучения.
Шарнирно-сочлененные роботы и дельта-роботы — два самых популярных робота по сериям. Поскольку вы рассматриваете робототехнику для своего производства или производственного предприятия, есть шесть дополнительных категорий роботов по сериям для изучения.
Коллаборативные роботы
Хотя автоматизация с выключенным светом — захватывающая концепция, на многих объектах роботы работают вместе с людьми, выполняя особо повторяющиеся или опасные задачи. Это позволяет вашей команде сосредоточиться на более интеллектуальной или познавательной работе. Коллаборативные роботы или коботы в производстве предназначены для работы бок о бок с людьми. Они используют функции остановки безопасности вместо ограждения, уменьшая площадь, занимаемую роботом. Некоторые модели предназначены для легкой работы, например, небольшие сборочные роботы, в то время как другие созданы для выполнения тяжелой работы в таких отраслях, как автомобилестроение, металлообработка, дистрибуция и упаковка.
Снижая нагрузку на сотрудников, эта серия роботов повышает безопасность на рабочем месте и позволяет людям сосредоточиться на более технически ориентированных задачах. У FANUC больше моделей коботов, чем у любого другого производителя коботов в отрасли, включая шесть моделей грузоподъемностью от 4 до 35 кг практически для любого производственного применения.
Роботы-укладчики на поддоны
Почти в каждой отрасли готовая продукция должна быть упакована в паллеты для транспортировки. Хотя в каждом секторе есть разные размеры готовой продукции с разными требованиями к весу и различными конфигурациями отгрузки, почти для каждой работы есть опция робота-укладчика на поддоны.
Роботы-укладчики на поддоны — это специализированное оборудование, которое служит в качестве робота для перемещения деталей. Эти сверхмощные роботы устанавливаются таким образом, что позволяют им взаимодействовать с последними этапами сборочной линии, чтобы захватывать, поднимать, перемещать и размещать полезные грузы в заданных конфигурациях.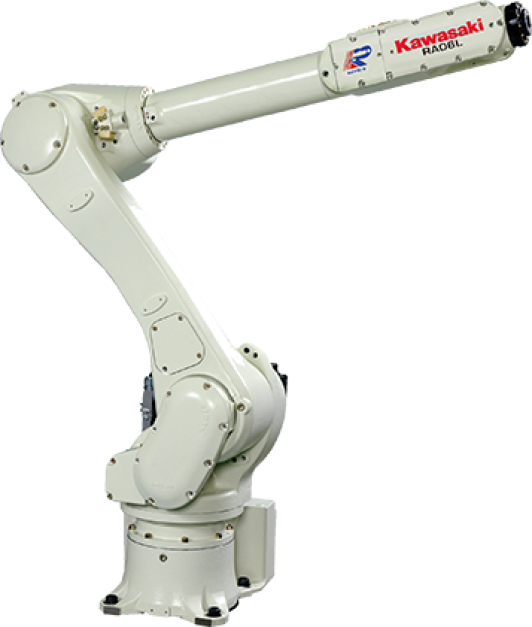
Погрузочно-разгрузочные роботы для роботов-укладчиков с высокой грузоподъемностью могут включать полезную нагрузку до 2300 кг. FANUC был одним из первых поставщиков роботов, разработавших серию, специально предназначенную для укладки на поддоны, и по-прежнему лидирует в отрасли.
Роботы для дуговой сварки
Роботы для дуговой сварки FANUC используются во многих отраслях промышленности. Они легко настраиваются и могут работать в очень тесных или узких местах. Эти роботы были впервые использованы в автомобильной промышленности для сварки сидений, осей и других компонентов, взяв на себя некоторые из самых опасных задач в отрасли.
Современные сверхмощные роботы рассчитаны на суровые условия сварки, поэтому ваш персонал может сосредоточиться на менее опасных работах. Эти сварочные роботы имеют тонкую руку и полое запястье. Промышленные роботы для дуговой сварки могут быть запрограммированы на лазерную сварку, пайку и резку.
FANUC предлагает широкий выбор моделей, которые можно настроить в соответствии со сварочными требованиями вашей организации. Робот для дуговой сварки поставляется с различными инструментами, которые повышают универсальность и делают сварочные процессы более безопасными. FANUC также предлагает серию коботов для дуговой сварки, которые могут работать в одном пространстве с вашими операторами сварки.
Робот для дуговой сварки поставляется с различными инструментами, которые повышают универсальность и делают сварочные процессы более безопасными. FANUC также предлагает серию коботов для дуговой сварки, которые могут работать в одном пространстве с вашими операторами сварки.
Роботы с верхним креплением
Роботы с верхним креплением спроектированы так, чтобы быть достаточно легкими, чтобы безопасно устанавливаться над рабочим пространством как часть системы сборки роботов, что делает их разновидностью мобильных роботов. Верхние крепления или портальный робот могут позволить ему перемещаться над производственным или производственным процессом.
Если вы ищете робота с большой полезной нагрузкой, эти легкие верхние крепления могут выдерживать полезную нагрузку до 70 кг. Эти 6-осевые станки также обеспечивают исключительную универсальность, упрощая и делая более безопасным уход за рабочими местами и управление ими.
Роботы с верхним креплением также снижают затраты на техническое обслуживание и погрузочно-разгрузочные работы. Эти модели имеют ряд осей и множество вариантов монтажа.
Эти модели имеют ряд осей и множество вариантов монтажа.
Покрасочные роботы
Роботы для покраски обеспечивают большую согласованность и скорость покрасочных работ и повышают безопасность в опасных условиях окрасочных работ. Эти роботы для нанесения покрытий имеют гладкую алюминиевую поверхность, устойчивую к загрязнению, и их легко чистить. Алюминиевая поверхность также делает малярных роботов легкими, поэтому они могут работать с меньшим энергопотреблением. Полое запястье позволяет трубкам проходить через робота, устраняя необходимость прокладки внешних шлангов.
Конфигурации шарнирно-сочлененных роботов FANUC могут работать с широким спектром задач по окраске и нанесению покрытий. 6-осевое сочленение позволяет оптимизировать рабочую зону шарнирно-сочлененного робота. Поскольку мы разработали некоторые модели для работы в опасных условиях с широким диапазоном досягаемости, покрасочные роботы могут избавить людей от необходимости помещать людей в ситуации, опасные для их здоровья. Все малярные роботы FANUC проектируются и производятся в Рочестер-Хиллз, штат Мичиган, с 1982.
Все малярные роботы FANUC проектируются и производятся в Рочестер-Хиллз, штат Мичиган, с 1982.
Серия SCARA
Роботы FANUC SCARA — быстрые, точные, простые в использовании и доступные по цене решения для максимальной производительности. Кроме того, роботы FANUC SCARA обеспечивают лучшую в своем классе скорость и производительность. Эти высокопроизводительные роботы предназначены для работы в составе роботизированной системы сборки, для захвата и размещения, а также в качестве инспекционных роботов в различных приложениях.
Хотя роботы SCARA часто представляют собой небольшие сборочные роботы и могут считаться роботами с легкой полезной нагрузкой, в зависимости от модели они также могут обрабатывать полезную нагрузку до 6 кг. Поскольку они имеют конструкцию с креплением на пьедестале, они занимают меньшую площадь и работают в пределах эффективной рабочей зоны робота SCARA. Это открывает захватывающие возможности для различных роботизированных упаковочных решений.
Программное обеспечение для промышленных роботов | Более 250+ программных функций
Варианты программного обеспечения для роботов
Благодаря более чем 250 программным функциям для улучшения интеллекта, движения, безопасности и производительности мы даем вам возможность заставить ваших роботов видеть, чувствовать, учиться и обеспечивать вашу безопасность.
Запрос информации о программном обеспечении
Программные продукты FANUC для роботов включают в себя специальные функции, простые в использовании интерфейсы и эксклюзивные функции для упрощения и стандартизации программирования роботов. Эти функции и преимущества позволяют пользователям FANUC быстро и легко запускать свои роботы с максимальной производительностью.
4D-графика
Опция 4D Graphics позволяет процессору 3D-графики в iPendant отображать робота,
инструменты, детали и другие компоненты ячеек в 3D-графике качества настольного компьютера. В сочетании с роботом
внутренние данные контроллера, обучающий кулон отображает невидимые данные в роботе как 4-е измерение
Информация.
Расширенный пакет РСУ
Расширенный пакет DCS включает в себя самые популярные и наиболее часто используемые опции безопасности, а также мощный вариант 4D-графики в одном экономичном пакете.
Расширенный пакет EIP
Расширенный пакет EIP (Ethernet/IP) включает в себя самые популярные и широко используемые средства связи. опции. Он включает в себя: Ethernet/IP-адаптер, Ethernet/IP EDA, ПК Remote iPendant, устройство HMI и пульт дистанционного управления. Опции iPendant в одном пакете. Этот вариант рекомендуется для интерфейса робота FANUC с контроллером Rockwell. GuardLogix или ПЛК CompactLogix.
All Smooth Stop
Когда указан All Smooth Stop, тип останова указанных аварийных сигналов становится остановом категории 1 во всех режимах. режимы работы (АВТО, режим Т1 и Т2).
Монитор производства дуги
Опция Arc Production Monitor используется со сварочными источниками питания Lincoln Power Wave,
поддержка мониторинга Lincoln Production Monitoring™ и CheckPoint™ на основе облачного сервера
особенность. Эта опция добавляет поддержку для выбора профиля сварки, настройки серийного номера детали, производства.
Мониторинг обработки ошибок, отображение WeldScore™ (включено в опцию аналогового измерителя), прокси
Поддержка сервера (включена в R558 — возможность подключения к Интернету и возможность настройки), использование сети
Настройка монитора.
Эта опция добавляет поддержку для выбора профиля сварки, настройки серийного номера детали, производства.
Мониторинг обработки ошибок, отображение WeldScore™ (включено в опцию аналогового измерителя), прокси
Поддержка сервера (включена в R558 — возможность подключения к Интернету и возможность настройки), использование сети
Настройка монитора.
ArcTool
Пакет прикладного программного обеспечения ArcTool предоставляет уникальное технологическое решение для роботизированной дуговой сварки.
ArcTorchMate
Опция ArcTorchMate представляет собой экономичное и простое в использовании решение для автоматической регулировки Центральная точка инструмента (TCP) в системах с одним движением или для систем, включающих MultiARM. особенность (два или более роботов, управляемых одним контроллером).
Автоматический выход назад
Auto Backward Exit (R861) позволяет роботу начать запись своего пути в определенный момент программы. и точно двигайтесь назад (влево) по записанному пути, чтобы вернуться в исходную начальную точку под
программный контроль.
и точно двигайтесь назад (влево) по записанному пути, чтобы вернуться в исходную начальную точку под
программный контроль.
Оси основного процесса
Базовые оси процесса позволяют настраивать и управлять серводвигателем или двигателями независимо от движения. группу с помощью групповых входов или двух специальных инструкций для обучающего подвесного пульта. Этот вариант рекомендуется для привода конвейеров, шпинделей и т. д., со вспомогательным серводвигателем. Технологический двигатель имеет следующее характеристики: ось принимает только команды скорости, положение оси не может быть задано напрямую, и ось не принадлежит ни к одной группе движения.
Базовый удаленный TCP
Опция Basic Remote TCP (RTCP) включает кадр RTCP, RTCP Jogging и RTCP Motion. RTCP это
рекомендуется для приложений, в которых робот контролирует ориентацию заготовки вокруг фиксированной
инструмент в рабочей ячейке. Кадр RTCP определяется первым, прежде чем опция RTCP используется для запуска робота или
включить движение RTCP в программу робота.
Найдите программное решение для ваших нужд
Свяжитесь с нами
Защита от столкновения
Collision Guard обеспечивает высокочувствительный метод обнаружения столкновения робота с объектом. а затем немедленно останавливает робота. Это помогает свести к минимуму возможность повреждения конца рычага. инструменты и робот. Защита от столкновений эффективна как для программного, так и для толчкового движения.
Постоянное отложение
Постоянная наплавка — это метод управления, позволяющий поддерживать постоянную скорость наплавки проволоки во время сварки. Это согласовывает скорость подачи присадочной проволоки с движением робота. Скорость подачи проволоки регулируется по мере того, как робот скорость изменяется из-за ускорения, замедления или запрограммированных изменений скорости.
Постоянный путь
Постоянный путь позволяет роботу сохранять один и тот же путь независимо от статической или динамической коррекции скорости. изменения. Путь, который был запрограммирован и протестирован при переопределении низкой скорости, будет сохранен, когда
программа выполняется со 100% переопределением.
изменения. Путь, который был запрограммирован и протестирован при переопределении низкой скорости, будет сохранен, когда
программа выполняется со 100% переопределением.
Индивидуальное плетение
Индивидуальное плетение позволяет создавать индивидуальную схему плетения для специализированных сварочных работ.
Безопасное подключение ввода/вывода DCS
DCS Safe I/O Connect используется для считывания и настройки входов и выходов безопасности.
Синхронизация двух дисков
Функция Dual Drive Motor Axis обеспечивает синхронную работу двух двигателей (ведущего и ведомого). Основная функция функции двойного привода состоит в том, чтобы компенсировать синхронную ошибку между главная и подчиненная оси.
Ввод/вывод глобальных данных EtherNet (EGD)
Глобальные данные Ethernet (EGD) позволяют обмениваться данными ввода-вывода через Ethernet с другими устройствами, такими как роботы и
GE Fanuc 90/30 PLC, которые поддерживают протокол EGD.:quality(80)/images.vogel.de/vogelonline/bdb/1093100/1093112/original.jpg) EGD использует UDP/IP и основан на клиент-серверном протоколе.
модель. EGD можно настроить для обмена до 256 байтов ввода-вывода.
EGD использует UDP/IP и основан на клиент-серверном протоколе.
модель. EGD можно настроить для обмена до 256 байтов ввода-вывода.
Улучшенное зеркальное отображение
Опция «Расширенное зеркальное отображение» позволяет переводить всю программу обучающего подвесного пульта или ее часть. научите подвесную программу зеркально отображать исходные запрограммированные точки.
Ethernet-порт Enhanced Vision
Порт Ethernet Enhanced Vision предоставляет порт Ethernet с ограниченными функциями, который поддерживает FTP (файловые передача), обмен сообщениями с помощью пользовательских сокетов и функциональность HTTP (веб).
Вывод кода ошибки
Опция вывода кода ошибки позволяет отправлять коды ошибок контроллера на другое устройство (например, на ПЛК) в виде числовых значений.
Расширенное управление осями
Опция «Расширенное управление осями» позволяет настроить серводвигатель FANUC для группы движения робота. Всего (включая оси робота) до 9 осей может быть настроено в группе движения робота. Эти двигатели FANUC
обычно используются для управления роботом на блоке передачи робота (RTU), приводя в действие сервозахват на
запястье робота или управление другими устройствами позиционирования/вращения.
Всего (включая оси робота) до 9 осей может быть настроено в группе движения робота. Эти двигатели FANUC
обычно используются для управления роботом на блоке передачи робота (RTU), приводя в действие сервозахват на
запястье робота или управление другими устройствами позиционирования/вращения.
Выбор внешнего режима
Выбор внешнего режима позволяет SAFE I/O [выбирать] режим работы (AUTO, T1 или T2) [с] удаленного устройство вместо переключателя режимов на панели оператора
Найдите программное решение для ваших нужд
Свяжитесь с нами
Интерфейс внешнего обзора (EVI)
В то время как FANUC i RVision — это чрезвычайно мощная полностью интегрированная 2D/3D-машина.
системы машинного зрения, FANUC осознает, что технология машинного зрения быстро развивается, и хочет, чтобы ее
чтобы клиенты могли воспользоваться преимуществами любой технологии, повышающей ценность роботов FANUC.
система. Интерфейс внешнего обзора (EVI) — это опция, позволяющая контроллеру робота FANUC подключаться к
легко с любой системой машинного зрения (MVS) с использованием обмена сообщениями через разъем Ethernet. FANUC EVI предлагает стандартные
Макросы КАРЕЛЬ
FANUC EVI предлагает стандартные
Макросы КАРЕЛЬ
Отчеты об ошибках и происшествиях
Параметр «Отчеты об ошибках и инцидентах» отображает журнал отчетов об ошибках. Проблемные зоны могут быть определяется путем просмотра гистограммы, показывающей пять основных сбоев по количеству инцидентов, продолжительности и общему количеству отказов. время. На графике показаны только неисправности, возникающие во время производства, и отсортированы повторяющиеся неисправности, которые были не зафиксировано.
Функция гибкого регулирования давления
Опция гибкого управления давлением добавляет новые функции к и без того мощному сервомолотному управлению FANUC.
программное обеспечение, помогающее клиентам выполнять пользовательские последовательности прессования с помощью линейных приводов с сервоприводом.
Недавно добавленные функции включают возможность плавного переключения между режимами управления силой и положением,
построение и анализ кривых крутящего момента в зависимости от положения, а также возможность определения пользовательского программирования TP
инструкция, управляющая всей последовательностью нажатия.
Библиотека сварочного оборудования Fronius
Опция библиотеки сварочного оборудования Fronius (R653) позволяет настроить ArcTool для связи с Источники питания для дуговой сварки Fronius с различными аппаратными и программными интерфейсами.
Синхронизация тепловой волны
Heat Wave Sync (R799) обеспечивает метод улучшения контроля над распределением энергии сварочной дуги по сварной шов путем синхронизации графиков сварки с положением переплетения горелки.
Высокоточное отслеживание линии
Опция High Accuracy Line Tracking (R884) повышает точность отслеживания за счет расширения возможностей робота. реакция на изменение скорости конвейера.
Устройство ЧМИ (SNPX)
Эта функция позволяет устройству HMI удаленно отслеживать и контролировать данные внутри робота.
контроллер. Робот взаимодействует с удаленным HMI, используя те же драйверы и адресацию, что и GE.
Фанук Серия 90 ПЛК.
Интеллектуальная проверка помех (IIC) для дуги
IIC (Intelligent Interference Check) для дуги (R872) — это опция, улучшенная [из] Intelligent Interference Check. Interference Check (R759), специально для удовлетворения потребностей приложений дуговой сварки.
Калибровочная рамка iRC
iRCalibration Frame Shift, ранее CellCal, — это параметр калибровки, который компенсирует изменения кадров. установив ГЛАВНЫЙ фрейм, который запускает программу обучения поиску фреймов. После того, как рамка изменения, iRCalibration Frame Shift снова запускает ту же программу обучения поиску кадров и вычисляет смещение кадра.
iRCalibration Vision Axis Master
iRCalibration Vision Axis Mastering восстанавливает статус мастеринга, который может быть утерян во время технического обслуживания. например, при замене двигателя. Он использует зрение для выравнивания целевых меток на роботе.
iRCalibration Vision Master Recovery
iRCalibration Vision Master Recovery восстанавливает данные мастеринга, автоматически измеряя цель с
камера до и после замены мотора/редуктора.
Мастеринг iRCalibration Vision
iRCalibration Vision Mastering повышает точность робота за счет автоматического измерения фиксированной цели (используя камера, прикрепленная к наконечнику инструмента робота) при изменении положения робота. Он регулирует оси Основные данные от J2 до J5 и константы упругости осей от J2 до J6. Пружинные константы могут быть регулируется только при включенной функции компенсации гравитации (используется как дополнительная функция).
iRCalibration Vision MultiCal
iRCalibraton Vision Multi Calibration использует оборудование iRVision для поиска координатных кадров между несколькими руки робота. Vision Multi-Cal определяет взаимосвязь между двумя роботами или между роботом и позиционер координируется одним контроллером.
iRCalibration Vision Shift
iRCalibration Vision Shift имеет две отдельные функции. 1. Легко изменяет выученные позиции
программы, если система перемещается или переустанавливается. 2. Простая модификация позиций программы робота
созданный с помощью автономной системы программирования на заводе.
2. Простая модификация позиций программы робота
созданный с помощью автономной системы программирования на заводе.
Набор iRCalibration Vision TCP
iRCalibration Vision TCP Set автоматически устанавливает центральную точку инструмента (TCP) робота с помощью камеры.
iRPickTool/инструменты повышения эффективности
Инструменты iRPickTool /Efficiency позволяют повысить производительность и сократить время простоя за счет только комплектования достижимых частей на конвейере.
Навигация iRVision 2D
Пакет iRVision 2D используется для обнаружения заготовок, которые смещаются в двух измерениях. Заготовки могут сдвигать параллельно рабочей поверхности (X,Y) и вращать на рабочей поверхности (Roll).
iRVision без калибровки
iRVision No-Cal позволяет использовать камеру iRVision для обнаружения деталей без необходимости калибровки
камеру или определить любые пользовательские кадры или кадры инструментов.
iRVision 3D Multi-View
Процесс 3D Multi-View Vision измеряет несколько точек заготовки для ее трехмерного положения и позы. с помощью четырех 2D-камер и обеспечивает компенсацию роботизированной обработки заготовки.
iRVision 3DL
Процесс 3D Laser (3DL) Vision измеряет 3D-плоскость заготовки и обеспечивает 3D-смещение для компенсация робота.
Считыватель штрих-кодов iRVision
Процесс Reader Vision считывает одномерные и двумерные штрих-коды.
Подборщик мусора iRVision
Опция iRVision Bin Picking позволяет системе машинного зрения распознавать положение и положение каждого частей, которые случайным образом размещаются внутри контейнера, а робот подбирает эти части одну за другой. один. Использует предотвращение помех для предотвращения столкновений между роботом/захватом и стенками бункера.
Клиент iRVision
Клиент iRVision позволяет роботу взаимодействовать с оборудованием машинного зрения. Координация между видением
аппаратное и программное обеспечение зависит от установленной версии программного обеспечения.
Координация между видением
аппаратное и программное обеспечение зависит от установленной версии программного обеспечения.
Инспекция iRVision
Опция iRVision Inspection (ранее называвшаяся Error Proofing) поддерживает широкий спектр задач машинного зрения. включая измерение объекта или элемента, наличие/отсутствие, обнаружение дефектов, проверку поверхностных дефектов, цветовой анализ и многие другие. iRVision Inspection может работать отдельно или в сочетании с другими Процессы iRVision, такие как 2D- или 3D-навигация (приобретаются отдельно).
Найдите программное решение для ваших нужд
Свяжитесь с нами
КАРЕЛЬ
Опция KAREL необходима для запуска любых клиентских программ KAREL в роботах FANUC. КАРЕЛ — мощный язык программирования, который позволяет вам получить доступ и управлять всеми аспектами робота FANUC, кроме движение.
Математические функции
Опция Math Function предоставляет дополнительные инструкции редактору программы TP, позволяя
математические функции. SIN, COS, TAN, ASIN, ACOS, ATAN, ATAN2, SQRT, LN, EXP, ABS, TRUNC и ROUND.
SIN, COS, TAN, ASIN, ACOS, ATAN, ATAN2, SQRT, LN, EXP, ABS, TRUNC и ROUND.
Утилита меню
Утилита меню предоставляет возможность разрабатывать множество функций пользовательского интерфейса для программы робота в рамках минут.
Библиотека сварочного оборудования Miller
Опция Miller Weld Equipment Library (R580) позволяет настроить ArcTool для связи с Источники питания для дуговой сварки Miller с различными аппаратными и программными интерфейсами.
Пакет движения
Пакет Motion включает в себя самые популярные и широко используемые параметры движения. Включает в себя: Столкновение Защита, постоянный путь, управление скоростью ADV-CP, управление путем ADV-CP, предотвращение сингулярности и движение Опции интерфейса в одном пакете.
Мульти интерфейс UOP
Интерфейс Multi UOP (J964) обеспечивает независимые интерфейсы UOP для поддержки управления до пяти программы.
Многофункциональное оборудование
Опция для нескольких устройств позволяет контроллеру робота управлять несколькими источниками питания для дуговой сварки. одновременно.
одновременно.
Многогрупповое движение
Группа движения определяет набор двигателей и осей, которые объединяются для выполнения задачи движения. ФАНУК роботы являются примером группы движения, обычно группы 1. Дополнительные группы движения определяются для оси управления на оборудовании, отличном от робота. Максимальное количество групп, которое может быть поддерживается контроллером, равно восьми. В качестве групп движения в систему можно добавить до четырех роботов.
Multi-Arm
MultiARM обеспечивает тесную связь всех роботов через единый контроллер.
Найдите программное решение для ваших нужд
Свяжитесь с нами
ROBOGUIDE (R) PaintPRO
Программное обеспечение PaintPRO представляет собой графическое автономное решение для программирования, которое упрощает обучение роботизированной траектории и
разработка процесса покраски. PaintPRO специально разработан для создания контуров, которые могут использоваться
Прикладное программное обеспечение PaintTool™ от FANUC America Corporation.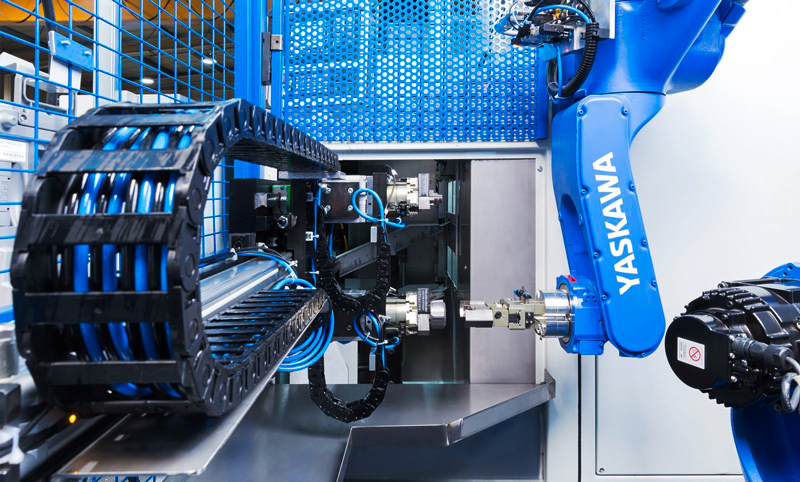
PaintWorks IV
PAINTworks IV от FANUC America предоставляет необходимые инструменты для интегрированного управления покрасочным цехом. система. Предлагая централизованное управление на уровне ячейки, PAINTworks IV взаимодействует со всеми роботами системы окраски, поршневые и колокольные зоны. PAINTworks IV также используется с роботизированными системами запайки и дозирования. предлагая архитектуру непрерывного контроля для всего цеха покраски. Базовое управление системой PAINTworks IV функциями являются управление процессом, мониторинг процесса и последовательность действий ячейки в реальном времени.
Инструмент для поддонов Turbo II
Пакет PalletTool Turbo II (R871) предназначен для упрощения настройки роботизированной укладки на поддоны. приложения, относящиеся к чемоданам или сумкам, с пакетом программного обеспечения, включающим PalletTool 4D.
Инструмент для поддонов Turbo Lite
PalletTool Turbo Lite предоставляет набор функций, поддерживаемых в PalletTool Turbo II. Это подмножество
обеспечивает идеальную конфигурацию заказа, доступную только для роботов CRX Collaborative. Это
включает в себя все функции, необходимые для эффективного паллетирования. Для совместного и несовместного CR
роботов, используйте PalletTool Turbo II.
Это подмножество
обеспечивает идеальную конфигурацию заказа, доступную только для роботов CRX Collaborative. Это
включает в себя все функции, необходимые для эффективного паллетирования. Для совместного и несовместного CR
роботов, используйте PalletTool Turbo II.
Подтверждение полезной нагрузки
Подтверждение полезной нагрузки используется для оценки точности настройки полезной нагрузки робота. Он включен в Идентификация полезной нагрузки.
Идентификация полезной нагрузки
Идентификация полезной нагрузки (J669), доступная для большинства моделей роботов, используется для оценки полезной нагрузки робота. автоматически с помощью встроенной функции. Идентификация полезной нагрузки также включает подтверждение полезной нагрузки. (J878), который используется для оценки точности настройки полезной нагрузки при незначительном движении робота.
Набор инструментов для разработчиков ПК (PCDK)
Комплект разработчика для ПК позволяет создавать приложения Microsoft Windows®, которые
коммуникационная информация и инструкции с контроллером робота FANUC. В приложениях используется
высокопроизводительный Robot Server и Robot Neighborhood, которые представлены как объектно-ориентированные API внутри
средства разработки Visual Basic 6, VB.NET и C#.
В приложениях используется
высокопроизводительный Robot Server и Robot Neighborhood, которые представлены как объектно-ориентированные API внутри
средства разработки Visual Basic 6, VB.NET и C#.
Файловые службы ПК
Программное обеспечение PC File Service предоставляет мощные возможности управления файлами для роботов FANUC. Это позволяет вам для планирования резервного копирования файлов приложений робота на ПК. Как ручные передачи, так и автоматические/периодические расписания поддерживаются.
Интерфейс ПК
Опция интерфейса ПК позволяет контроллеру реагировать на приложения ПК, написанные с помощью ПК. Комплект разработчика (PCDK).
Интерфейс управления движением ПЛК
Интерфейс PLC Motion позволяет программировать роботов R-30iB Plus с помощью дополнительных инструкций FANUC. (АОИ).
Регистратор процессов
Process Logger собирает данные приложения, связанные с процессом. Затем вы можете использовать обучающий подвесной интерфейс
графически анализировать тренды для выявления корректировок ненормального поведения процесса. Регистратор процессов
позволяет вам устанавливать пороги для собираемых элементов процесса и размещать сигналы тревоги, если элемент должен упасть
из толерантности.
Затем вы можете использовать обучающий подвесной интерфейс
графически анализировать тренды для выявления корректировок ненормального поведения процесса. Регистратор процессов
позволяет вам устанавливать пороги для собираемых элементов процесса и размещать сигналы тревоги, если элемент должен упасть
из толерантности.
Направляющие iHMI R-30iB Plus
Направляющие iHMI R-30iB Plus обеспечивают беспрецедентную простоту использования и простоту настройки.
Пульт дистанционного управления iPendant
Опция Remote iPendant позволяет использовать HMI, например планшет, в качестве удаленного iPendant, включая возможность запускать робота в автоматическом режиме.
Инструмент для удаления
Прикладное программное обеспечение RemovalTool и устройство контроля усилия обеспечивают экономичное решение. для роботизированной обработки поверхностей и кромок.
ROBOGUIDE (R) PaintPRO
Программное обеспечение PaintPRO представляет собой графическое автономное решение для программирования, которое упрощает обучение роботизированной траектории и
разработка процесса покраски. PaintPRO специально разработан для создания контуров, которые могут использоваться
Прикладное программное обеспечение PaintTool™ от FANUC America Corporation.
PaintPRO специально разработан для создания контуров, которые могут использоваться
Прикладное программное обеспечение PaintTool™ от FANUC America Corporation.
Найдите программное решение для ваших нужд
Свяжитесь с нами
ROBOGUIDE (R) WeldPRO
WeldPRO позволяет пользователям моделировать процесс роботизированной дуговой сварки в трехмерном пространстве. Вы можете легко ориентироваться через WeldPRO для создания полных рабочих ячеек путем импорта реальных файлов САПР инструментов и заготовок. Кто угодно знакомый с программированием робота FANUC сможет легко создавать новые траектории сварки с соответствующей горелкой углы и параметры процесса. Все программы и настройки [из] виртуального рабочего места могут быть перенесены к реальному роботу, чтобы сократить время установки.
Интерфейс RSI
Интерфейс удаленного датчика (RSI) — это функция, облегчающая обмен данными о местоположении и т. д. с
внешнее устройство, такое как ПК или контроллер стороннего производителя.
Сервогорелка
ServoTorch — это полностью интегрированный, управляемый сервоприводом, монтируемый на запястье, четырехроликовый (4) «вытягивающий» провод. кормушка, управляемая роботами серии ARC Mate®. Конструкция оптимизирована для подачи алюминия и мягких провод. Интеграция двигателя подачи проволоки с управлением движением робота обеспечивает сопряжение сварочного процесса.
Одно- и двухосевые позиционеры
Одно- и двухосевые сервопозиционеры FANUC America — это высокопроизводительные позиционеры, разработанные предоставить интеграторам деталей и инструментов гибкое, надежное и экономичное решение манипуляции во время нанесения.
Избегание сингулярности
Функция предотвращения сингулярности позволяет роботу FANUC с встроенным запястьем избегать сингулярности запястья.
автоматически во время линейного движения, что позволяет избежать замедления TCP во время высокой скорости J4 и J6
встречно-вращательные движения, связанные с сингулярностью запястья.
Библиотека сварочного оборудования SKS (R864)
Опция SKS Weld Equipment Library (R864) позволяет настроить ArcTool для связи с SKS arc. сварочные источники питания через соединение Ethernet IP с интерфейсом SKS FB5 Fieldbus.
Мягкий поплавок
Мягкое плавание используется для компенсации отклонений в точности заготовки в тех случаях, когда робот используется для крепления заготовок на станке.
Сплайновое движение (R904)
Spline Motion определяет траекторию, которая плавно проходит через обученные точки. Движение по пути поддерживает запрограммированную скорость на поворотах, если механические ограничения не будут превышены.
SpotTool+
SpotTool+ упрощает и стандартизирует настройку, интерфейс, программирование, эксплуатацию и обслуживание
Роботы FANUC, используемые в кузовных мастерских, включая точечную сварку, приварку шпилек, дозирование и
обработка материала. Предусмотрены встроенные функции, типичные для приложений кузовного цеха, что позволяет пользователю
легко обучать позиционным данным и логическим последовательностям, используя знакомые термины и команды меню.
Потоковое движение
Опция Streaming Motion позволяет внешнему устройству выполнять планирование траектории пути, траектории пути к роботу почти в реальном времени, что позволяет использовать очень гибкие и динамичные приложения.
Найдите программное решение для ваших нужд
Свяжитесь с нами
Комплект для сварки толстых листов
Сочетает в себе функции сенсорного контроля и отслеживания шва по дуге в одном удобном варианте.
Отслеживание сквозного шва
Отслеживание швов по дуге (TAST) автоматически регулирует вертикальную и боковую траекторию робота в соответствии с заданными параметрами. компенсировать деформацию или смещение детали. Часто используется с Touch Sensing для определения начала сварного шва. соединение, TAST измеряет ток обратной связи и регулирует траекторию движения робота, чтобы сварной шов оставался в соединении. центр.
Защита горелки
Защита горелки — это набор опций, которые используются для выполнения точной дуговой сварки.
Ограничение крутящего момента
Инструкция ограничения крутящего момента позволяет вам ограничить максимальное значение крутящего момента указанного вспомогательного двигателя или двигатели осей робота.
Датчик касания
Touch Sensing использует датчик, например лазерный, для обеспечения бесконтактной компенсации детали. смещение за счет автоматического изменения траектории сварки, что устраняет необходимость ручной подкраски точек.
Сенсорный пропуск
Touch Skip можно использовать для автоматического выполнения SKIP, когда возмущающий крутящий момент превышает заданные пределы. из-за неожиданного столкновения роботов.
Выбор режима TP
Выбор режима TP позволяет вам [[выбрать]] режим работы (AUTO/T1/T2 или AUTO/T1) непосредственно [из] Научите подвесной экран.
Tracking Jog
Функция Tracking Jog для MultiARM упрощает обучение программированию MultiARM.
