Как создать робота-рисовальщика своими руками. Какие детали нужны для сборки рисующего робота. Как запрограммировать робота для рисования заданных фигур и изображений. Каковы перспективы применения роботов-художников в будущем.
Что такое робот-рисовальщик и как он работает
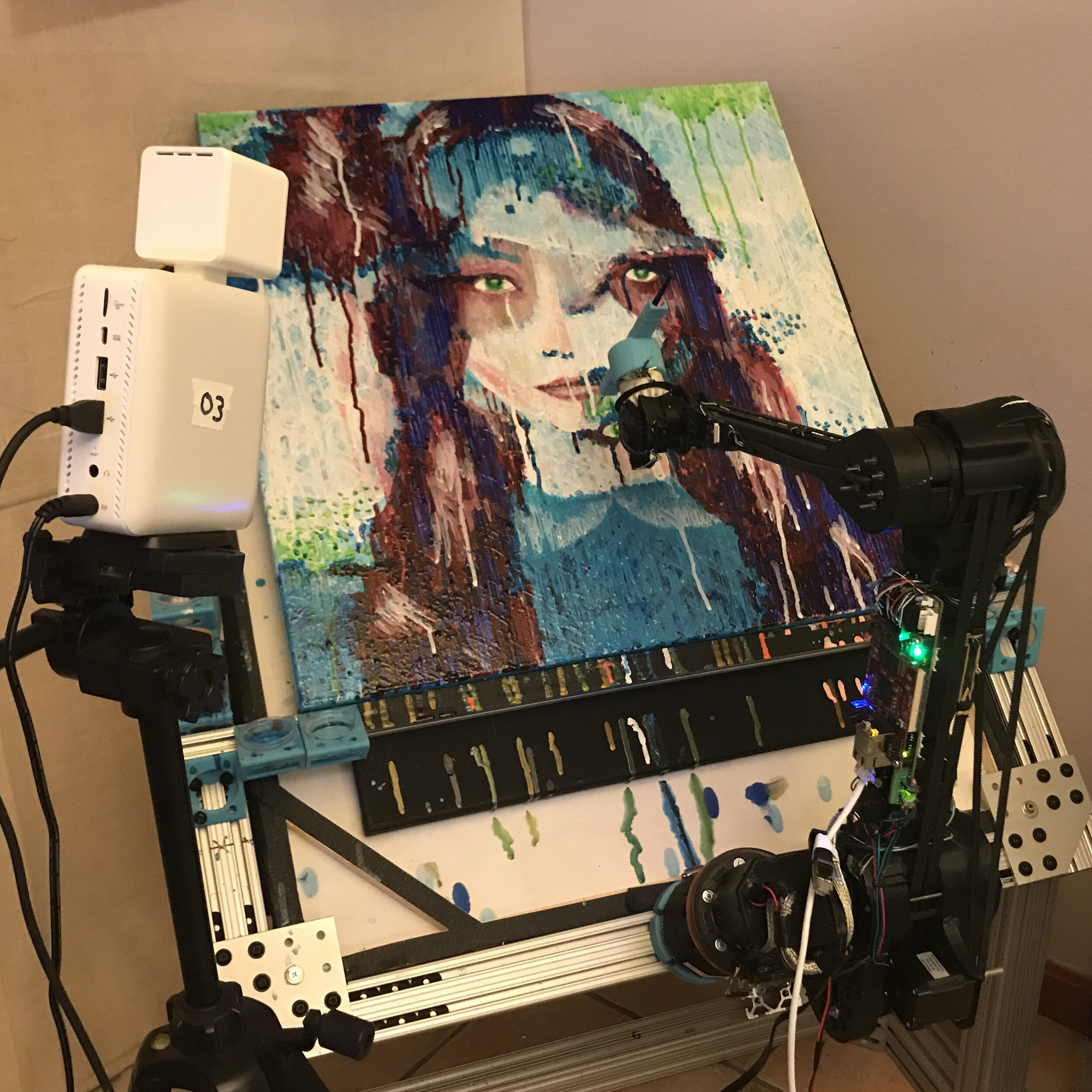
Робот-рисовальщик — это автоматизированное устройство, способное создавать рисунки и изображения на плоской поверхности с помощью различных инструментов. Принцип работы такого робота заключается в преобразовании цифровых данных об изображении в механические движения рисующего элемента.
Основные компоненты робота-рисовальщика включают:
- Механическую платформу для перемещения
- Рисующий механизм (держатель для маркера, кисти и т.п.)
- Сервоприводы для управления движениями
- Микроконтроллер для обработки команд
- Программное обеспечение для преобразования изображений в команды
Как работает процесс рисования роботом? Изображение разбивается на отдельные линии и точки. Затем программа генерирует последовательность команд для сервоприводов, которые перемещают рисующий элемент по заданной траектории. Это позволяет воспроизвести исходное изображение с высокой точностью.
Преимущества использования роботов-рисовальщиков
Роботы-рисовальщики обладают рядом уникальных преимуществ по сравнению с ручным рисованием:
- Высокая точность и повторяемость результатов
- Способность работать непрерывно длительное время
- Возможность создавать сложные масштабные изображения
- Воспроизведение цифровых изображений в физической форме
- Рисование на различных поверхностях и материалах
- Программируемость и гибкость настройки
Эти преимущества делают роботов-рисовальщиков востребованными в различных сферах — от образования и развлечений до промышленного дизайна и искусства. Они позволяют реализовать творческие идеи, которые сложно воплотить вручную.
Создание робота-рисовальщика на базе LEGO Mindstorms EV3
Конструктор LEGO Mindstorms EV3 предоставляет отличную базу для создания простого робота-рисовальщика. Какие компоненты потребуются для сборки?
- Микрокомпьютер EV3 — «мозг» робота
- Два больших сервомотора для движения платформы
- Средний сервомотор для управления рисующим элементом
- Датчики касания для ручного управления
- Инфракрасный датчик для дистанционного управления
- Детали конструктора для сборки корпуса и механизмов
Процесс сборки включает создание подвижной платформы на гусеничном ходу и закрепление на ней рисующего механизма с держателем для маркера. Сервомоторы обеспечивают перемещение робота и подъем/опускание маркера. Датчики позволяют управлять роботом в ручном режиме.
:strip_icc()/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/x/y/ZPeUZYRdOAekOK1ZdizA/2011-06-24-robo-artista.jpg)
Программирование робота-рисовальщика на базе EV3
Для управления роботом-рисовальщиком на базе EV3 можно использовать графическую среду программирования LEGO Mindstorms. Какие основные блоки программы потребуются?
- Блоки управления большими моторами для движения платформы
- Блок управления средним мотором для маркера
- Блоки ожидания нажатия датчиков касания
- Блок ожидания сигнала с ИК-датчика
- Циклы для повторения действий
- Переключатели для выбора режимов
С помощью этих блоков можно запрограммировать базовые движения робота — вперед, назад, поворот, подъем/опускание маркера. Комбинируя простые команды, можно заставить робота рисовать различные фигуры и надписи.
Пример простой программы для рисования квадрата:
- Опустить маркер
- Двигаться вперед 3 секунды
- Повернуть на 90 градусов
- Повторить шаги 2-3 еще 3 раза
- Поднять маркер
Усложняя алгоритмы, можно научить робота рисовать более сложные изображения и даже воспроизводить векторную графику.
Перспективные области применения роботов-рисовальщиков
Роботы-рисовальщики находят все более широкое применение в различных сферах. Какие направления выглядят наиболее перспективными?
- Образование — обучение основам робототехники и программирования
- Искусство — создание масштабных художественных инсталляций
- Реклама — автоматизированное нанесение изображений на различные поверхности
- Промышленный дизайн — быстрое прототипирование и визуализация идей
- Строительство — разметка поверхностей и нанесение маркировки
- Развлечения — интерактивные аттракционы и шоу
По мере развития технологий роботы-рисовальщики становятся более точными, быстрыми и функциональными. Это открывает новые возможности для их практического применения в самых разных областях.
Ограничения и недостатки современных роботов-рисовальщиков
Несмотря на впечатляющие возможности, роботы-рисовальщики пока имеют ряд ограничений:
- Ограниченный выбор инструментов для рисования
- Сложность точной передачи цветов и оттенков
- Невозможность имитировать некоторые техники рисования
- Отсутствие художественной интерпретации и импровизации
- Высокая стоимость промышленных моделей
- Сложность программирования сложных изображений
Преодоление этих ограничений — одно из основных направлений совершенствования технологий роботизированного рисования. Ведутся разработки более совершенных механизмов и алгоритмов, позволяющих расширить художественные возможности роботов.
Будущее роботов-рисовальщиков: перспективы развития технологий
Каких инноваций можно ожидать в сфере роботов-рисовальщиков в ближайшие годы?
- Интеграция искусственного интеллекта для создания оригинальных изображений
- Разработка более совершенных инструментов для рисования
- Создание многофункциональных роботов-художников
- Миниатюризация и удешевление устройств
- Расширение палитры используемых материалов
- Интеграция с технологиями дополненной реальности
Эти инновации позволят роботам-рисовальщикам выйти на новый уровень и найти еще более широкое применение как в промышленности, так и в творческих индустриях. Возможно, в будущем роботы смогут создавать настоящие произведения искусства наравне с человеком.
Заключение: роботы-рисовальщики как шаг к творческому искусственному интеллекту
Роботы-рисовальщики представляют собой важный этап в развитии творческих возможностей искусственного интеллекта. Они демонстрируют, как машины могут не только воспроизводить, но и создавать визуальный контент. Хотя до полноценного машинного творчества еще далеко, эти устройства открывают новые горизонты в области автоматизированного искусства и дизайна.

Сочетание механических систем, алгоритмов компьютерного зрения и элементов искусственного интеллекта позволяет создавать все более совершенные роботизированные системы для рисования. В будущем они могут стать незаменимыми помощниками художников и дизайнеров, расширяя границы человеческого творчества.
Робот-художник EV3 Print3rbot
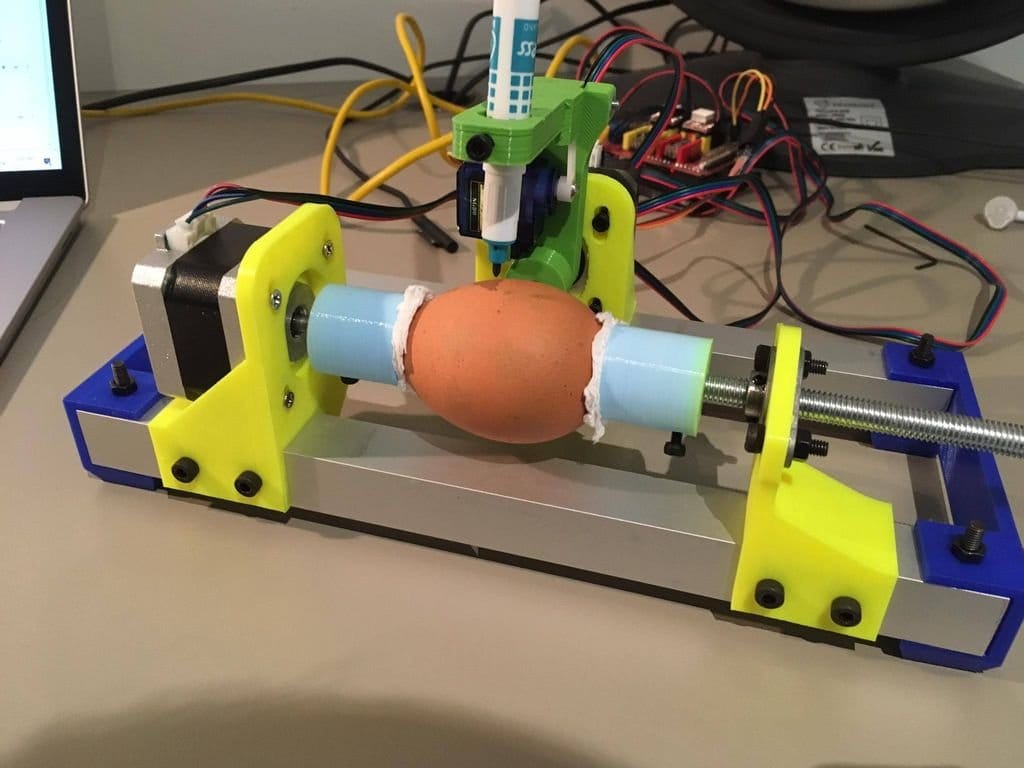
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Посмотреть, как робот рисует логотип сайта ПрогХаус, можете на следующем видео:
Автором проекта является Christophe Avenel. Страничку проекта вы можете найти здесь. В оригинальной конструкции робота используются детали из домашнего набора конструктора, плюс две шестерёнки из образовательного набора и три детали распечатанные на 3D-принтере. Моя конструкция такая же, но я собрал этого робота, используя только детали из базового образовательного набора. При этом размеры рук совпадают и можно использовать оригинальную авторскую управляющую программу без изменений.
При этом размеры рук совпадают и можно использовать оригинальную авторскую управляющую программу без изменений.
Собираем робота-художника EV3 Print3rbot
Сначала я сразу дам схему сборки робота-художника EV3 Print3rbot, а затем напишу, как оживить его. Кроме базового образовательного набора LEGO Mindstorms EV3 (45544) вам понадобятся ещё фломастер диаметром около 8 мм и 4 резинки для денег. Более тонкий фломастер не подойдёт, т.к. он будет стоять неровно, и будет болтаться. Итак, вот схема сборки робота:
Файлы:
| Инструкция для сборки робота-художника EV3 Print3rbot Версия:от 24.03.2017 | |
Инструкция для сборки робота-художника EV3 Print3rbot из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544). В версии от 24.03.2017 добавлены забытые необходимые детали. |
|
23. 03.2017 9.55 MB 105354 03.2017 9.55 MB 105354 |
Фломастер вставляйте сверху вниз, а после того как вы просунули его на достаточное расстояние, чуть потяните его обратно вверх, чтобы он прочно закрепился. После этого зафиксируйте его резинками, как показано на картинке, чтобы он не болтался. Резинки, которые держат фломастер, должны быть хорошо натянуты.
Две другие резинки нужны, чтобы руки робота не люфтили. Эти две резинки тоже должны быть хорошо натянуты. Если вы оттягиваете руки робота, то эти резинки должны возвращать их назад.
Установка ev3dev
Управляющая программа работает на прошивке ev3dev, поэтому сначала нужно установить на EV3 эту прошивку. Как это сделать написано в статье «ev3dev – устанавливаем и настраиваем Debian Linux на LEGO Mindstorms EV3». Там же написано, как выполнять команды на EV3 и как копировать файлы на EV3, поэтому эту статью читайте обязательно.
Обратите внимание, что версия ev3dev должна быть ev3dev-jessie-ev3-generic-2017-02-11 или более поздняя.
Установка управляющей программы
Управляющая программа написана на языке программирования Python (Питон). Чтобы установить программу нужно просто скопировать нужные файлы в EV3. Здесь есть два способа.
1. Если EV3 подключен к интернету, то вы можете выполнить следующую команду:
git clone https://github.com/cavenel/ev3-print3rbot.git
Так вы скопируете на свой EV3 последнюю версию необходимых файлов непосредственно из репозитория проекта. После копирования файлы будут находиться в папке /home/robot/ev3-print3rbot.
Копирование с HTTPS у меня не заработало при подключении EV3 к компьютеру через USB-кабель. А при подключении к интернету через Wi-Fi всё скопировалось без проблем. Поэтому, если по каким-либо причинам команда не выполнилась, используйте второй способ.
2. Вы можете скачать папку ev3-print3rbot со всеми необходимыми файлами со страницы проекта (для этого нажмите на кнопку «Clone or download» и выберите пункт «Download ZIP») к себе на компьютер.
Или скачайте чуть более старую версию файлов, которую использовал я, по ссылке ниже.
| Управляющая программа для робота-художника EV3 Print3rbot Версия:от 23.03.2017 | |
Управляющая программа для робота-художника EV3 Print3rbot. |
|
| 23.03.2017 22.36 KB 8472 |
После скачивания, распакуйте архив ev3-print3rbot-master.zip, переименуйте папку «ev3-print3rbot-master» на «ev3-print3rbot» и скопируйте её в директорию /home/robot на EV3.
Подготовка изображений
Управляющая программа работает только с векторными рисунками формата SVG, причём только с такими SVG-файлами, которые не содержат трансформации. Чтобы конвертировать любой SVG-файл, вы можете воспользоваться программой Inkscape. Для этого скачайте и установите на компьютер Inkscape. Затем запустите программу, выберите меню «Правка -> Параметры», в диалоге настроек найдите «Поведение -> Трансформация» и удостоверьтесь, что выбран режим сохранения трансформаций «С оптимизацией». После этого закройте окно с параметрами и закройте программу Inkscape.
Для этого скачайте и установите на компьютер Inkscape. Затем запустите программу, выберите меню «Правка -> Параметры», в диалоге настроек найдите «Поведение -> Трансформация» и удостоверьтесь, что выбран режим сохранения трансформаций «С оптимизацией». После этого закройте окно с параметрами и закройте программу Inkscape.
Теперь вы можете конвертировать файл следующей командой:
"C:\Program Files\Inkscape\inkscape.exe" image1.svg --verb=EditSelectAll --verb=ObjectToPath --verb=SelectionUnGroup --verb=FileSave --verb=FileClose --verb=FileQuit
где «C:\Program Files\Inkscape\inkscape.exe» — это путь к программе Inkscape на вашем компьютере, image1.svg – это путь к вашему файлу, а всё остальное – это действия, которые будет делать Inscape. После выполнения команды, файл будет подготовлен для того, чтобы его мог использовать робот-художник.
Перед началом рисованием размер рисунка будет подогнан под размеры области рисования, поэтому реальный размер изображения не имеет значения.
Готовый файл скопируйте на EV3 в папку /home/robot/ev3-print3rbot/images.
Запуск управляющей программы
Прежде чем запустить программу поменяйте текущую папку, если вы ещё этого не сделали, с помощью команды:
cd ev3-print3rbot/
Затем откройте в редакторе файл writer.py, найдите в конце строку:
wri.draw_image(image_file = 'images/test.svg',max_speed=35)
Здесь test.svg – это файл, который робот художник будет рисовать. Файл test.svg уже есть в папке images, так что вы можете, ничего не меняя, сразу запустить программу и посмотреть, что нарисует робот-художник. А вот, чтобы робот нарисовал другой рисунок, используя ваш SVG-файл, замените имя test.svg на имя своего файла, например, image1.svg. Обратите внимание, что перед запуском программы ваш SVG-файл должен быть подготовлен и скопирован в папку images как об этом уже было написано выше.
Файл, который робот рисует на видео, вы можете скачать здесь:
Логотип ПрогХаус в формате SVG для робота-художника EV3 Print3rbot
Версия:от 23. 03.2017 03.2017 |
|
Логотип ПрогХаус в формате SVG для робота-художника EV3 Print3rbot. |
|
| 23.03.2017 3.93 KB 3192 |
Запустите управляющую программу командой:
python3 writer.py
После этого робот, поднимет руки вверх, затем сложит их и начнёт рисовать.
Запуск управляющей программы из меню ev3dev
Кроме способа описанного выше вы можете запустить управляющую программу прямо из меню ev3dev. Для этого найдите с помощью проводника файл writer.py и выберите его (т.е. нажмите на центральную кнопку EV3). После этого управляющая программа запустится.
Добавить комментарий
Робот-рисовальщик
- Главная
- Список секций
- Техническое творчество и изобретательство
- Робот-рисовальщик
- Авторы
- Руководители
- Файлы работы
- Наградные документы
Бочковский Р.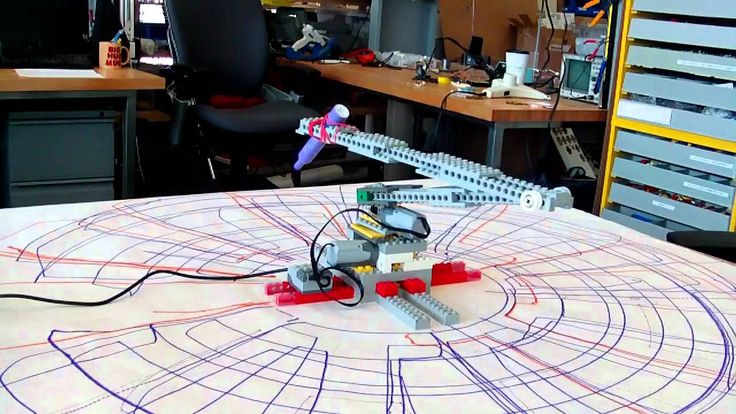 А. 1Сметанин Д.М. 1
А. 1Сметанин Д.М. 1
1МБОУ «СОШ №3»
Гурова А.А. 1
1МБОУ «СОШ №3»
Автор работы награжден дипломом победителя III степени
Диплом школьникаСвидетельство руководителя
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке «Файлы работы» в формате PDF
Введение
Сегодня роботы-художники распространены среди любителей конструирования. И нам тоже это очень интересно, поэтому мы решили создать робота-рисовальщика. Когда робот рисует запрограммированную тобой фигуру или надпись, чувствуешь себя волшебником. Подобные роботы могут использоваться как в развлекательных целях, так и в профессиональной среде.
Цель нашего проекта: на основе микрокомпьютера EV3, деталей конструктора LEGOMindstorms и различных дополнительных материалов сделать робота, способного «нарисовать» на плоскости заданную фигуру, а также рисовать под управлением инфракрасного пульта и под управлением кнопок (влево, вправо, вперед, назад, по диагонали).
Для достижения цели поставлены следующие задачи:
составить план сбор робота-рисовальщика;
осуществить сборку робота, который способен рисовать на плоскости;
составить программу для корректной работы робота;
провести апробацию робота.
Основные методы создания – это моделирование, конструирование и программирование.
1 Теоретическая часть
1.1 Возможности конструктора LegoMindstormsEV3
В моем распоряжении находилось набор конструктора LEGOMINDSTORMSEV3. Используя его, можно создать собственных роботов LEGO: животных, транспортные средства, машины, приборы и управлять ими. С помощью различных сочетаний программных блоков, моторов и датчиков можно заставить свои модели ходить, говорить, захватывать предметы, думать, стрелять и выполнять любые действия, которые только можно придумать. Каждый робот обладает уникальными функциями и программами для управления его поведением, которые можно написать в бесплатном приложении для программирования для планшетов и ПК/MAC. Есть множество способов оживить роботов LEGOMINDSTORMS, используя специальное приложение, которое можно установить на смартфон.
С помощью различных сочетаний программных блоков, моторов и датчиков можно заставить свои модели ходить, говорить, захватывать предметы, думать, стрелять и выполнять любые действия, которые только можно придумать. Каждый робот обладает уникальными функциями и программами для управления его поведением, которые можно написать в бесплатном приложении для программирования для планшетов и ПК/MAC. Есть множество способов оживить роботов LEGOMINDSTORMS, используя специальное приложение, которое можно установить на смартфон.
2 Практическая часть
Продумав все конструкционные элементы, мы приступили к конструированию нашей модели. Модель робота состоит из двух частей: платформы для крепления рисующего механизма и собственно сам рисующий механизм.
В таблице приведены основные блоки и их использование в проекте.
|
Изображение |
Название |
Для чего используется |
|
Микропроцессор EV3. |
Управляют движением сервомоторов |
|
|
Два больших сервомотора EV3 |
Электромоторы управляют движением гусениц вперед-назад |
|
|
Средний сервомотор EV3 |
Электромотор управляет движением маркера влево-вправо |
|
|
Четыре датчика касания |
Выполняют роль кнопок, которые запускают работу сервомоторов |
|
|
Инфракрасный датчик |
Позволяет управлять работой микро-компьютера с ИК-пульта |

В результате нашей деятельности был создан готовый к использованию робот-рисовальщик, который способен нарисовать запрограммированную надпись EV3 и пешеходную зебру. Также робот может рисовать под управлением кнопок (датчики касания):
Также робот может рисовать под управлением кнопок (датчики касания):
Нажатие на первую кнопку запускает движение вперед;
Нажатие на вторую кнопку запускает движение назад;
Нажатие на третью кнопку запускает движение вправо;
Нажатие на четвертую кнопку запускает движение влево;
Нажатие на первую и третью кнопку одновременно запускает движение вперед-вправо по диагонали;
Нажатие на первую и четвертую кнопку одновременно запускает движение вперед-влево по диагонали;
Нажатие на вторую и третью кнопку одновременно запускает движение назад-вправо по диагонали;
Нажатие на вторую и четвертую кнопку одновременно запускает движение назад-влево по диагонали.
Также роботом можно управлять с ИК-пульта. Четыре кнопки пульта запрограммированы аналогично датчикам касания, которые выполняют роль кнопок.
Заключение
Цель нашей работы считаем достигнутой.
Список использованных источников
Руководство пользователя https://robot-help.ru/images/lego-mindstorms-ev3/instructions/ev3_user_guide_education.pdf
Изучаем датчик касания https://robot—help.ru/lessons/lesson-4.html
Просмотров работы: 231
STOW Group Robotics Electrical Draftsman
- Brandstraat 30, 9160 Lokeren, Belgium
- Полная занятость
- Отдел: Инженерное дело
Описание компании
Stow является динамичным и глобальным ключевым игроком в индустрии стеллажей и хранения. В соответствии с нашим постоянным ростом и инновационными усилиями мы разработали автоматизированные решения для хранения как поддонов, так и контейнеров. Эти автоматизированные решения возглавляет Stow Robotics.
В соответствии с нашим постоянным ростом и инновационными усилиями мы разработали автоматизированные решения для хранения как поддонов, так и контейнеров. Эти автоматизированные решения возглавляет Stow Robotics.
Описание работы
- Изучает и анализирует чертежи и/или другую соответствующую информацию, предоставленную внутренними заинтересованными сторонами.
- Сообщает об отсутствующей информации, проблемах и/или предлагает другие возможные решения внутренним заинтересованным сторонам для эффективного создания чертежей.
- Проверяет документацию по оборудованию и при необходимости измеряет оборудование, чтобы обеспечить правильное использование и оптимальную конфигурацию назначенного оборудования.
- Создает концептуальные чертежи, чертежи проектов и оборудования с использованием программного обеспечения САПР в соответствии со стандартами чертежей компании.
- Улучшает стандарты рисования компании.
- Поддерживает библиотеку Eplan для оптимизации создания проектов в будущем.
- Преобразует требования проекта в соответствующие чертежи проекта.
- Создает автоматизированный способ создания повторяющихся частей чертежей проекта.
- Оптимизирует содержание чертежей, добавляя информацию об электрических компонентах, например, настройки микропереключателей, скриншоты конфигураций и т. д.
- Следим за электрическими шкафами клиентов на нашем производстве, чтобы гарантировать, что шкафы соответствуют самым высоким стандартам и доставляются вовремя.
- Предоставляет инженеру систем управления обратную связь относительно новых компонентов или изменений в чертежах.
Квалификация
- Степень бакалавра или магистра инженерии со специализацией в области электромеханики, электричества или аналогичной области.
- Опыт работы чертежником-электриком не менее 2 лет.
- Хорошее знание Eplan.
- Автономный командный игрок.
- Критично и точно.
- Хорошие организаторские способности.

- Свободное владение голландским и английским языками.
Дополнительная информация
- Вы будете тесно сотрудничать с другими звездами рэка в открытой и полной энтузиазма среде.
- Вы сможете участвовать в обучении.
- Вы будете иметь привлекательную заработную плату в международной среде, в том числе
- Конкурентоспособная брутто-зарплата
- Групповое и медицинское страхование
- Ваучеры на питание (8 €)
- Бонус CAO90
- 40 часов в неделю + 12 дней ADV
2 909003 Важное примечание! -
Unimate был первым работающим промышленным роботом.
 Он был создан Джорджем Деволем в 1950-х годах и работал на сборочных линиях с 1961 года.
картинка: http://spectrum.ieee.org/image/MTkyOTkyOQ
Он был создан Джорджем Деволем в 1950-х годах и работал на сборочных линиях с 1961 года.
картинка: http://spectrum.ieee.org/image/MTkyOTkyOQ -
Космическая война! видео о космических боях, созданное в 1962 году. Это была первая видеоигра, созданная для компьютера. Изображение: https://en.wikipedia.org/wiki/Spacewar_(video_game)
-
DTMF был впервые разработан в Bell System в США и стал известен под торговой маркой Touch-Tone для использования в кнопочных телефонах, поставляемых клиентам, начиная с 1963 года. https://en.wikipedia.org/wiki/Dual-tone_multi-frequency_signaling
-
Sketchpad (он же Robot Drawingman) — революционная компьютерная программа, написанная Айвеном Сазерлендом в 1963 году в ходе его докторской диссертации, за которую он получил премию Тьюринга в 1919 году.88. https://en.wikipedia.org/wiki/Sketchpad
-
Telcan, произведенный британской компанией Nottingham Electronic Valve Company в 1963 году, был первым домашним видеомагнитофоном.
 Его можно было купить целиком или в виде комплекта за 60 фунтов стерлингов, что эквивалентно примерно 1100 фунтам стерлингов (более 1600 долларов США) в валюте 2014 года. Однако у него было несколько недостатков: он был дорогим, его было непросто собрать, и он мог записывать только 20 минут за раз. Он был записан в черно-белом формате, единственном доступном в то время в Великобритании формате.
https://en.wikipedia.org/wiki/Videocassette_recorder
Его можно было купить целиком или в виде комплекта за 60 фунтов стерлингов, что эквивалентно примерно 1100 фунтам стерлингов (более 1600 долларов США) в валюте 2014 года. Однако у него было несколько недостатков: он был дорогим, его было непросто собрать, и он мог записывать только 20 минут за раз. Он был записан в черно-белом формате, единственном доступном в то время в Великобритании формате.
https://en.wikipedia.org/wiki/Videocassette_recorder -
В 1962 году компания Philips изобрела компакт-кассетный носитель для хранения аудио, представив его в Европе 30 августа 1963 года на Берлинском радиошоу и в США (под брендом Norelco) в ноябре 1964 года под торговой маркой Compact Cassette. Команду Philips возглавил Лу Оттенс в Хасселте, Бельгия. https://en.wikipedia.org/wiki/Compact_Cassette#Before_the_Compact_Cassette
-
CDC 6600 обычно считается первым успешным суперкомпьютером, превосходящим своего самого быстрого предшественника, IBM 7030 Stretch, примерно в три раза.
 https://en.wikipedia.org/wiki/CDC_6600
https://en.wikipedia.org/wiki/CDC_6600 -
Barclays выпустил первую кредитную карту в Великобритании, Barclaycard, в 1966 году. 27 июня 1967 года Barclays установил первый в мире банкомат в Энфилде. Британский актер Рег Варни был первым, кто использовал эту машину. https://en.wikipedia.org/wiki/Barclays#1946_to_1980
-
Magnavox Odyssey — первая коммерческая домашняя игровая консоль. Odyssey была разработана Ральфом Х. Бэром при содействии инженеров Уильяма Харрисона и Уильяма Руша. Они начались около 1966, а к 1968 году был закончен рабочий прототип. https://en.wikipedia.org/wiki/Magnavox_Odyssey
-
Через несколько месяцев после того, как Telefunken начал продавать Rollkugel, Энгельбарт выпустил свою демоверсию 9 декабря 1968 года. https://en.wikipedia.org/wiki/Computer_mouse#History
Мы переедем из Шпьер-Хелкин в Локерен в феврале 2023 года.
Вы готовы отправиться в Шпьер-Хелкин, пока мы не переедем.
Мне интересно
Политика конфиденциальностиPowered by
(обработчик данных)
Политика конфиденциальности и условия использования
Хронология технологий 1960-х годов
Корень американской истории
Жизнь Эрин Келли
1970-е
Шампейн-Урбана История
AP ХРОНОЛОГИЯ ГЛАВ ИСТОРИИ США
Т Уильямс APUSH Хронология
Хронология семидесятых ( :
Гражданская война в США
История мудрости Н.
