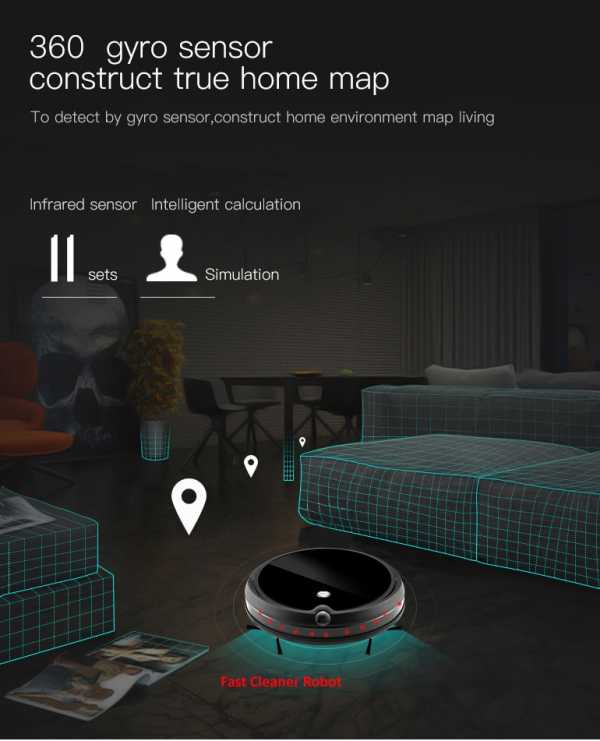
Что представляют собой роботы с камерами на радиоуправлении. Какие модели наиболее популярны. Как работают i-spy Tank, Rover Tank и Mini Spy Robot. Каковы их основные характеристики и возможности. Как управлять такими роботами-камерами.
Что такое робот с камерой на радиоуправлении
Робот с видеокамерой на радиоуправлении — это современное устройство для мобильного видеонаблюдения. Он представляет собой компактную платформу на колесах или гусеницах, оснащенную камерой и системой дистанционного управления. Основные особенности таких роботов:
- Небольшие размеры и маневренность
- Наличие встроенной видеокамеры
- Возможность удаленного управления через Wi-Fi или радиоканал
- Автономное питание от аккумуляторов
- Передача видео в режиме реального времени
Роботы-камеры могут использоваться для различных целей — от развлечения до профессионального видеонаблюдения в труднодоступных местах. Рассмотрим наиболее популярные модели таких устройств.

Обзор модели I-spy Tank
I-spy Tank — одна из самых распространенных моделей роботов-камер. Ее ключевые характеристики:
- Внешний вид в виде игрушечного танка
- Управление через Wi-Fi с помощью смартфона или планшета
- Камера с разрешением 640×480, 30 кадров/сек
- Поворотная камера с изменяемым углом наклона
- Дальность управления до 30 м в помещении, до 60 м на открытом пространстве
- Питание от 6 батарей, время работы до 80 минут
- Встроенная подсветка для работы в темноте
I-spy Tank отлично подходит как для развлечения, так и для наблюдения за детьми в качестве видеоняни. Управление осуществляется через специальное мобильное приложение.
Возможности модели Rover Tank
Rover Tank — еще одна популярная модель робота-камеры. Ее отличительные особенности:
- Футуристичный дизайн корпуса
- Камера с разрешением 320×240, 3 Мп
- Инфракрасная подсветка для работы в темноте
- Встроенный микрофон для записи звука
- Управление через Wi-Fi с мобильных устройств
- Питание от 6 батарей AA, время работы до 80 минут
- Дальность управления аналогична I-spy Tank
Главное преимущество Rover Tank — наличие инфракрасной подсветки и микрофона, что позволяет использовать его для скрытого видеонаблюдения в темное время суток.

Особенности модели Mini Spy Robot
Mini Spy Robot отличается от предыдущих моделей следующими характеристиками:
- Компактные размеры и специфичный дизайн
- Управление с помощью отдельного пульта радиоуправления
- Черно-белая камера
- Противоударный корпус
- Возможность самостоятельно переворачиваться при падении
- Не требует подключения к смартфону
Mini Spy Robot хорошо подходит для использования в сложных условиях благодаря защищенному корпусу. При этом качество видео у него ниже, чем у конкурентов.
Как управлять роботом-камерой на примере I-spy Tank
Рассмотрим процесс управления роботом-камерой на примере модели I-spy Tank:
- Установите на смартфон специальное приложение I-spy Toys
- Включите робота с помощью переключателя на корпусе
- Дождитесь, когда замигает индикатор Wi-Fi соединения
- Найдите в настройках Wi-Fi вашего смартфона сеть робота и подключитесь к ней
- Запустите приложение I-spy Toys
- В приложении появится изображение с камеры робота
- Используйте виртуальные кнопки для управления движением
- Можно делать фото и видео с помощью соответствующих кнопок
Таким образом, управление роботом-камерой интуитивно понятно и не требует специальных навыков. Главное — обеспечить стабильное Wi-Fi соединение между роботом и смартфоном.

Сферы применения роботов с камерами
Роботы-камеры на радиоуправлении могут использоваться в различных сферах:
- Развлечения и игры для детей и взрослых
- Видеонаблюдение за детьми в качестве «видеоняни»
- Осмотр труднодоступных мест (под автомобилем, в узких проходах)
- Охрана помещений и территорий
- Исследование опасных зон
- Съемка видео от первого лица
- Обучение основам робототехники
Компактные размеры и маневренность позволяют таким роботам проникать туда, куда сложно попасть человеку. При этом оператор может наблюдать за происходящим в режиме реального времени.
Преимущества и недостатки роботов-камер
Рассмотрим основные плюсы и минусы использования роботов с камерами на радиоуправлении:
Преимущества:
- Мобильность и возможность удаленного управления
- Компактные размеры
- Передача видео в реальном времени
- Возможность записи фото и видео
- Автономная работа от аккумуляторов
- Многофункциональность применения
Недостатки:
- Ограниченное время работы от батарей
- Невысокое качество видео у бюджетных моделей
- Ограниченная дальность действия Wi-Fi
- Возможные помехи при передаче видеосигнала
- Уязвимость к механическим повреждениям
Несмотря на некоторые недостатки, роботы-камеры остаются востребованными устройствами благодаря своей универсальности и простоте использования.

Как выбрать робота с камерой
При выборе робота-камеры стоит обратить внимание на следующие параметры:
- Разрешение и качество камеры
- Наличие инфракрасной подсветки для ночной съемки
- Время автономной работы
- Дальность действия управления
- Наличие микрофона для записи звука
- Способ управления (Wi-Fi или отдельный пульт)
- Защищенность корпуса от повреждений
- Возможность поворота и наклона камеры
Выбор конкретной модели зависит от целей использования. Для развлечения подойдут более простые и недорогие варианты, а для профессионального применения стоит выбирать модели с расширенным функционалом.
Серия мобильных камер-роботов «I-spy Танк» и преимущества моделей
Содержание страницы
Робот с камерой на радиоуправлении – это новинка среди беспроводных устройств видеонаблюдения. Представленные игрушки имеют футуристичный и неожиданный дизайн. Такой шпион понравится и детям и взрослым!
На сегодняшний день первенство завоевали несколько видов радиоуправляемых/Wi-Fi роботов. Это «i-spy Tank», «Rover Tank» и «Mini Spy Robot». Все эти устройства объединяет возможность беспроводного управления, компактный размер и встроенная видеокамера. Тут общие черты заканчиваются, так как по конструкции и дизайну, управлении и противоударной защите, мегапикселям в камере и функциям – роботы отличаются.
«I-spy Tank»

Радиоуправляемые шпионы «i-spy Tank» — это мобильные камеры для видеонаблюдения, исполненные в виде игрушки. Применение такого танка различно: для игр детей и взрослых, для наблюдения за детьми (в качестве видеоняни), для просмотра труднодоступных мест (под машиной) и т. д.
Робот с камерой управляется посредством Wi-Fi и специальной программы, через устройства на базе операционных систем от компании Google и Apple Сама веб-камера может поворачиваться, выдвигаться в вверх или менять угол наклона и имеет разрешение: 640 х 480, 30 кадров/сек. Зона управления – 30 метров в помещении и 60 метров при открытой/прямой видимости.
Питается шпион на радиоуправлении от 6 батарей и характеризуется полной автономностью. Продолжительность действия составляет 80 минут на полностью заряженных батареях.
Внешний вид
Игрушка «i-spy Tank» разработана на базе танка, но дизайн футуристичен и подчеркнут обтекаемыми деталями пластикового корпуса. Радиоуправляемый шпион имеет четыре колеса, две гусеницы, антенну и встроенную веб-камеру. Сверху, возле камеры расположены сигнальная лампа и индикатор питания. Освещение танка осуществляется с помощью встроенных «фар»: две сзади и спереди.
Перевернув робота на радиоуправлении – можно увидеть съёмную крышку для батарей, тумблер включателя, кнопку Reset и SSID адрес.
Включение
Для непосредственного включения радиоуправляемого «i-spy Tank» необходимо сначала загрузить приложение в магазине. Программа называется «I-spy Toys» и загрузка полностью бесплатна.
Инструкция включения:
- После скачивания и установки, необходимо перевернуть игрушку и переключить тумблер в положение ON. Впоследствии должен загореться индикатор питания, находящийся слева от объектива веб-камеры.
- Примерно через минуту начнёт мигать сигнальная лампа справа от объектива. Это означает, что шпион на радиоуправлении обнаружил Wi-Fi соединение.
- Зайдите в настройки Wi-Fi устройства на базе Android или iPhone, iPad. Здесь появится SSID адрес (номер указан на задней части танка). Необходимо провести сопряжение (то есть нажать на адрес и подождать подключения).
- Зайдите в приложение «I-spy Toys», если вы видите картинку – значит игрушка настроена и готова к работе.
Радиоуправляемые игрушки можно также перезагрузить посредством нажатия на кнопку Reset.
Управление
После включения танка и входа в приложения – воспроизводится изображение в режиме реального времени.
Управление «i-spy Tank» на радиоуправлении:
- При входе в приложение наблюдаются индикаторы управления в правом и левом углах дисплея в виде подсвечиваемых кругов. Левая кнопка управляет движением назад/вперед, а правая — поворотами: влево/вправо.
- Между индикаторами управления, находятся две отдельно расположенные стрелочки: Вниз/Вверх, которые выдвигают или опускают камеру из корпуса.
- Чтобы сделать фото – нажмите на иконку с изображением фотоаппарата, которая расположена сверху дисплея. Спустя несколько секунд – всплывет оповещение о сохранении картинки на устройстве.
- Для начала записи – нажмите на иконку с изображением видеокамеры, которая расположена сверху дисплея (возле фото). После того как вы произвели управление шпиона по заданному маршруту – сохраните запись. Это осуществляется повторным нажатием на кнопку видеокамеры.
- Для просмотра, сохранённых записей, необходимо нажать иконку просмотра, которая расположена сверху дисплея (возле видеокамеры). Устройство на базе Android или iPhone, iPad выведет две папки, где сохранены файлы и предоставит просмотр видео или фотографий.
- «I-spy Tank» на радиоуправлении имеет функцию «Gyro mode». Иконка для включения находится, также сверху дисплея и изображена в виде «волчка». Для входа в режим – нажмите на иконку. Для движения вперед – наклоните устройство iPhone/iPad/Android вперед, а для движения назад – возвращайте в исходное положение/наклоните назад. Для поворота вправо – наклоните iPhone/iPad/Android вперед. Соответственно для того, чтобы повернуть игрушку влево – необходимо наклонить iPhone/iPad/Android влево.
- Дисплей в приложении можно переверчивать, с помощью иконки в виде стрелочки, которая находится возле индикатора «Gyro mode». Для включения/выключения функции – нужно нажать на иконку ON, которая расположена возле неё.
Радиоуправляемые танки модели «i-spy Tank» не имеют микрофона для прослушивания в режиме реального времени.
«Rover Tank»
Шпион «Rover Tank» — это мобильная камера для видеонаблюдения, исполненная в виде игрушки на радиоуправлении. Имеет похожий дизайн с «i-spy Tank», но в данном случае камера встроена в корпус и не выдвигается. Веб-камера имеет разрешение 320 х 240, 3 мегапикселя. Преимуществом среди аналогов является инфракрасная подсветка, которая в темных помещениях осуществляет хороший обзор. Также, возле оптики, встроен микрофон для прослушки.
Робот с камерой управляется с помощью специальной программы, через устройства на базе Android или iPhone, iPad, подключение к Wi-Fi. Зона управления – 30 м в помещении и 60 м при открытой/прямой видимости.
Питается шпион на радиоуправлении от 6 батарей класса АА и характеризуется полной автономностью. Продолжительность действия составляет 80 минут на полностью заряженных батареях.
Применяется такой танк, как и «i-spy tank»: для игр детей и взрослых, для наблюдения за детьми (в качестве видеоняни), для просмотра труднодоступных мест (под машиной) и т. д.
Внешний вид
Радиоуправляемые игрушки «Rover Tank» исполнены в более футристичном дизайне, чем «i-spy tank». Корпус модели также обтекаем и изготовлен из пластика. Также шпион имеет четыре колеса с гусеницами, антенну и встроенную веб-камеру с инфракрасной подсветкой и микрофоном. Сверху, возле камеры расположены сигнальная лампа и индикатор питания. Освещение маршрута, осуществляется с помощью встроенных «фар»: две сзади и спереди.
Перевернув робота на радиоуправлении – можно увидеть съёмную крышку для батарей, тумблер включателя, кнопку Reset и SSID адрес.
Включение
Включается «Rover Tank» также, как и «i-spy Tank»: необходимо загрузить приложение в магазине, подключится к Wi-Fi и зайти в приложение для управления. Программа разработана компанией Bookstore и загрузка полностью бесплатна.
Инструкция включения танка на радиоуправлении:
- После скачивания и установки, необходимо перевернуть игрушку и переключить тумблер в положение ON.
- Зайти в настройки Wi-Fi устройства Android или iPhone, iPad, где появится SSID адрес (номер указан на задней части танка). Провести подключение.
- Зайти в приложение.
Управление
После включения танка и входа в приложения – воспроизводится изображение в режиме реального времени.
Управление танком на радиоуправлении:
- При входе в приложение, наблюдаются индикаторы управления в правом и левом углах дисплея в виде иконок. Стрелки управления расположены слева и справа и отвечают за движения вперед/назад и соответственно влево/вправо.
- Также, как и в «i-spy tank» имеются иконки фото, видео и «Gyro mode». Управление этими функциями аналогично.
- Иконка звука – включат или выключает воспроизведение аудио при нажатии.
Радиоуправляемые роботы компании Bookstore – это не только видеонаблюдение в помещениях различной степени освещения, но и возможность прослушивания.
«Mini Spy Robot»

Радиоуправляемые модели «Mini Spy Robot» имеют очень специфичный дизайн. Корпус устройства противоударный/ В комплектацию робота входит черно-белая веб-камера, три колеса.
В отличие от предыдущих моделей, устройством командуют дистанционно, с помощью пульта на радиоуправлении. Этот девайс не подключается к мобильным телефонам или планшетам.
Перед непосредственным началом работы, необходимо прикрутить к пульту две антенны и переключить тумблер в положение ON. Шпион будет готов к работе, после изъятия «чеки» из отверстия, которое находится возле колеса.
Такие радиоуправляемые модели обладают преимуществом, в виде противоударности и возможности выхода из любого положения, в отличие от «Rover Tank» или «i-spy Tank» (не имеют возможности перевернуться, если оказались на спине).
Шпионы на радиоуправлении «Rover Tank», «i-spy Tank», «Mini Spy Robot» — это возможность скрытого видеонаблюдения. В случае использования «Rover Tank» это еще и прослушка. Отличиями также являются и способ управления: «Mini Spy Robot» принимает команды от пульта на радиоуправлении, а «Rover Tank» и «i-spy Tank» — от мобильного телефона или планшета. Также, «Mini Spy Robot» имеет повышенную защиту от ударов и черно-белую камеру, а его аналоги пластиковый корпус и показывают цветное изображение.
arze.ru
Мобильный робот с камерой на Raspberry Pi
Raspberry Pi это одноплатный компьютер, сделанный для обучения базовым компьютерным навыкам для школьников. В последствии получивший намного более широкое применение и популярность, чем ожидали его авторы. Наша плата выглядит так: Данная версия платы оснащена процессором ARM11 фирмы Broadcom BCM2835[4] с тактовой частотой 700 МГц и модулем оперативной памяти на 256МБ/512МБ.
Raspberry Pi работает под управлением операционной системы Linux.
Мы, будем использовать плату версии «B» с установленной ОС Raspbian.
Данная версия платы оснащена процессором ARM11 фирмы Broadcom BCM2835[4] с тактовой частотой 700 МГц и модулем оперативной памяти на 256МБ/512МБ.
Raspberry Pi работает под управлением операционной системы Linux.
Мы, будем использовать плату версии «B» с установленной ОС Raspbian.
1. Сборка робота на базе гусеничной платформы
Raspberry Pi и камера будут установлены на гусеничную платформу. По сути это будет мобильная система видеонаблюдения. Сама Raspberry Pi с драйвером моторов будет закреплена с помощью конструктора Lego, так как на данной плате отсутствуют необходимые крепежные элементы.
Сама Raspberry Pi с драйвером моторов будет закреплена с помощью конструктора Lego, так как на данной плате отсутствуют необходимые крепежные элементы.
 Электропитание платы и моторов раздельное. На моторы стоит 8 аккумуляторов по 1.2 вольта, на плату стоять 2 аккумулятора по 3.7 вольта. Все аккумуляторы включены последовательно. Моторы получают питание через драйвер моторов выполненный на L293D с помощью навесного монтажа.
Электропитание платы и моторов раздельное. На моторы стоит 8 аккумуляторов по 1.2 вольта, на плату стоять 2 аккумулятора по 3.7 вольта. Все аккумуляторы включены последовательно. Моторы получают питание через драйвер моторов выполненный на L293D с помощью навесного монтажа.
 Электропитание самой платы осуществляется через линейный стабилизатор, так как требуется фиксированное напряжение в 5 вольт.
Что умеет данная платформа делать:
1. Сам перемещаться по площади (квартире и тд) используя датчик Ultrasonic HC-SR04 для обьезда препядствий.
2. Снимать через определенное время фото (видео кадр) снимок и отправлять его на яндекс или гугл диск.
3. Сам подъезжать на базу для подзарядки используя ИК-локатор.
4. Возможность ручного управления, используя браузер и интернет.
Стабилизатор для питания самой платы raspberry.
На макетной плате был собран драйвер управления моторами на L293 и установлен гироскоп mpu-6050, подключенный по шине I2C.
Электропитание самой платы осуществляется через линейный стабилизатор, так как требуется фиксированное напряжение в 5 вольт.
Что умеет данная платформа делать:
1. Сам перемещаться по площади (квартире и тд) используя датчик Ultrasonic HC-SR04 для обьезда препядствий.
2. Снимать через определенное время фото (видео кадр) снимок и отправлять его на яндекс или гугл диск.
3. Сам подъезжать на базу для подзарядки используя ИК-локатор.
4. Возможность ручного управления, используя браузер и интернет.
Стабилизатор для питания самой платы raspberry.
На макетной плате был собран драйвер управления моторами на L293 и установлен гироскоп mpu-6050, подключенный по шине I2C.
 Общаться с интернетом будет за счет вот такого WiFi адаптера Tp-Link.
Общаться с интернетом будет за счет вот такого WiFi адаптера Tp-Link.
 Завелся сразу из коробки, без установки дополнительного программного обеспечения.
Так же установлена камера для raspberry pi с CSI интерфейсом.
Завелся сразу из коробки, без установки дополнительного программного обеспечения.
Так же установлена камера для raspberry pi с CSI интерфейсом.
 Для поворота камеру использоваться будет вот такой механизм на двух сервоприводах.
Для поворота камеру использоваться будет вот такой механизм на двух сервоприводах.
 Управлять им будет Raspberry напрямую с GPIO портов, как и моторами движения через микросхему L293D.
Зарядка робота будет осуществляется с док станции к которой надо будет подъехать. Для этого на передней части шасси установлены контакты для подзарядки.
Управлять им будет Raspberry напрямую с GPIO портов, как и моторами движения через микросхему L293D.
Зарядка робота будет осуществляется с док станции к которой надо будет подъехать. Для этого на передней части шасси установлены контакты для подзарядки.
 Была куплена в магазине вот такая макетная плата на которой все будет смонтировано. От деталей конструктора Lego для крепления Raspberry пришлось отказаться, так как не все умещается.
Была куплена в магазине вот такая макетная плата на которой все будет смонтировано. От деталей конструктора Lego для крепления Raspberry пришлось отказаться, так как не все умещается.
 Прикрепив ее к шасси получаем.
Прикрепив ее к шасси получаем.
 Далее на штырьки так крепим саму Raspberry Pi.
Далее на штырьки так крепим саму Raspberry Pi.
 Теперь на шасси.
Теперь на шасси.
 Примерно вот так будет ездить платформа:
Примерно вот так будет ездить платформа:
2. Общая схема подключения

3. Подключение моторов
Подробно разберём схему подключения моторов с помощь L293D.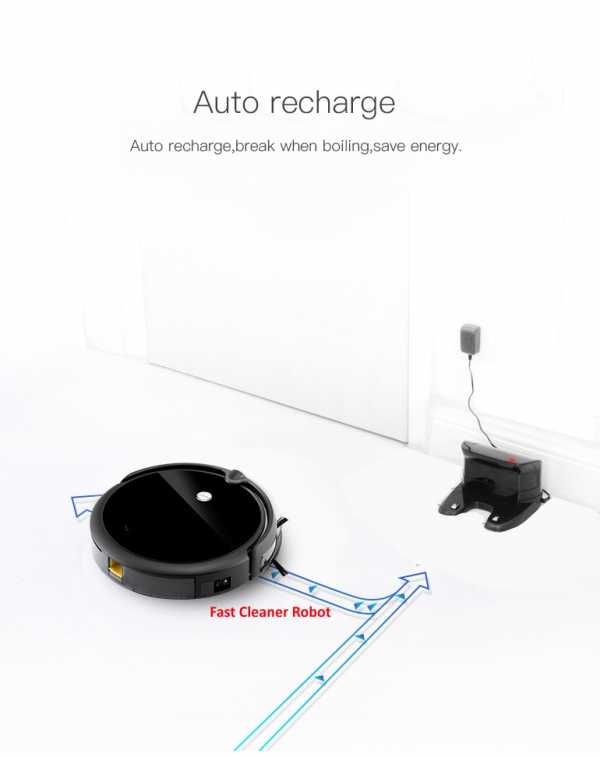 Порты GPIO Raspberry Pi к драйверу моторов подключаем следующим образом:
Левый мотор:
L293 IN1 on GPIO 9
L293 IN2 on GPIO 10
L293 EN1 on GPIO 11
Правый мотор:
L293 IN3 on GPIO 23
L293 IN4 on GPIO 24
L293 EN2 on GPIO 25
Порты GPIO Raspberry Pi к драйверу моторов подключаем следующим образом:
Левый мотор:
L293 IN1 on GPIO 9
L293 IN2 on GPIO 10
L293 EN1 on GPIO 11
Правый мотор:
L293 IN3 on GPIO 23
L293 IN4 on GPIO 24
L293 EN2 on GPIO 25
4. Настройка Raspberry Pi
Для того чтобы управлять данным шасси удалено, нужен белый IP адрес (постоянный), который можно сделать с помощью роутера находящегося в помещении. Для удаленного управления и настройки нам понадобится программа PuTTY. Скачать ее можно на просторах интернета. На Raspberry нужно включить SSH сервер, если вы этого не сделано то в консоли нужно набрать командуsudo raspi-configВ пункте SSH нажать на Enable. Далее перезагрузить плату, теперь мы можем удаленно подключится. Устанавливаем на нашем компьютере PuTTY и настраиваем ее. Для этого в вкладке «Сеанс» вводим IP адрес Raspberry Pi. IP адрес можно посмотреть в настройках роутера. Номер порта оставляем 22, тип соединения SSH. Нажимаем «Сохранить» введя при этом название сеанса. Теперь настройки сохранены. Далее выбираем пункт Соединение -> Данные и вводим наши имя и пароль для входа на Raspberry. Если не меняли, то имя и пароль те же: pi и raspberry. Вводим мы это для того, чтобы не вводить каждый раз имя и пароль при входе. Теперь выбираем пункт SSH ->X11 и ставим галочку напротив «Включить переадресацию X11», а в строчке «Отображение дисплея Х» необходимо написать
localhost:0Вернемся в вкладку «Сеанс» и сохраняем все настройки под тем именем, что уже записали. Всё, настройка завершена! Нажимаем «Соединить» и входим в командную строку Raspberry Pi. Теперь настраиваем картинку с камеры в браузер. Для этого в командной строке вводим:
sudo apt-get updateПосле завершения работы команды, пишем следующую:
sudo apt-get upgradeЗатем:
sudo raspi-configи включаем поддержку камеры. Перезагружаемся, снова запускаем PuTTY и соединяемся с raspberry. Далее устанавливаем приложения нужные для правильной работы mjpg-streamer:
sudo apt-get install libjpeg8-devЗатем:
sudo apt-get install cmakeСкачиваем исходники mjpg-streamer:
wget github.com/jacksonliam/mjpg-streamer/archive/master.zipПотом распаковываем полученный архив:
unzip ./master –d ./Valli (Vflli произвольное имя)Заходим в папку
cd /Valli/mjpg-streamer-master/mjpg-streamer-experimentalдалее вводим
make clean allКомандой nano меняем файл start.sh
sudo nano Valli/mjpg-streamer-master/mjpg-streamer-experimental/start.shудаляем там две незакомментрованные строки и пишем вместо них
cd etc/ms/mjpg-streamer-master/mjpg-streamer-experimental ./mjpg_streamer -o "./output_http.so -w ./www" -i "./input_raspicam.so -x 640 -y 480 -fps 10 -ex auto -awb auto -vs -ISO 100"Выходим из редактора командой Ctrl+X, затем Enter (соглашаемся с изменением) и Y (да). В папке mjpg-streamer-experimental запускаем наш скрипт:
./start.shДолжно запуститься и в консоли будет много букв на камере загорится светодиод. Команда Ctrl+C остановит скрипт и светодиод погаснет. Открываем браузер, заходим по такой ссылке:
ip-address-raspberry:8080/?action=stream(где ip-address-raspberry – это IP нашей raspberry) и попадаем на вебсервер, нажимаем на Stream и видим:
 Чтоб робот двигался необходимо установить веб-интерфейс, который будет управлять роботом. Устанавливаем. Для начала скачиваем WebIOPi
Чтоб робот двигался необходимо установить веб-интерфейс, который будет управлять роботом. Устанавливаем. Для начала скачиваем WebIOPi
wget webiopi.googlecode.com/files/WebIOPi-0.6.0.tar.gzраспаковываем
tar xvzf WebIOPi-0.6.0.tar.gzЗаходим в папку
cd WebIOPi-0.6.0и запускаем файл установки командой
sudo ./setup.shПосле установки, командой:
update-rc.d webiopi defaultsделаем автозапуск интерфейса с raspberry. Как всегда открываем браузер, заходим по такой ссылке: ip-address-raspberry:8000 и получаем
 В итоге получаем:
Всем удачи!
В итоге получаем:
Всем удачи!Вконтакте
Google+
robotclass.ru
Мобильные камеры-роботы | Блог cambat.ru
Одной из новинок беспроводных технологий является робот с видеокамерой на радиоуправлении. В настоящее время есть несколько самых распространенных моделей таких устройств: «i-spy Tank», «Rover Tank» и «Mini Spy Robot». Все эти роботы похожи тем, что ими можно дистанционно управлять, они имеют небольшой размер и оснащены встроенной камерой видеонаблюдения. По всем остальным же параметрам они имеют множество отличий между собой.
 Итак, рассмотрим подробнее одного из них — «I-spy Tank». Такое устройство представляет собой мобильную видеокамеру, внешне которая имеет вид игрушки. Использовать такую камеру можно в различных целях: в качестве игрового устройства как для детей, так и для более старшего поколения; в качестве видеоняни для присмотра за детьми и в других целях.
Итак, рассмотрим подробнее одного из них — «I-spy Tank». Такое устройство представляет собой мобильную видеокамеру, внешне которая имеет вид игрушки. Использовать такую камеру можно в различных целях: в качестве игрового устройства как для детей, так и для более старшего поколения; в качестве видеоняни для присмотра за детьми и в других целях.
Управлять таким роботом можно за счет Wi-fi соединения и специального программного обеспечения, с использованием устройств, работающих на операционных системах от Google и Apple. Встроенная веб-камера способна двигаться по кругу, подниматься вверх. Кроме того, устройство может менять угол наклона. Разрешение видеокамеры 640 х 480, 30 кадров/сек.. Управлять этой игрушкой можно на расстоянии до 30 метров, если находиться в каком-либо помещении, а при использовании ее на открытой местности расстояние возрастает до 60 метров. Питание такому устройству обеспечивают 6 батарей. За счет этого оно может абсолютно автономно функционировать. При полной зарядке робот может непрерывно проработать 80 минут.
Игрушка «i-spy Tank» внешне полностью напоминает танк. Корпус сделан из пластика. Робот состоит из следующих элементов: 4 колеса, 2 гусеницы, антенна и встроенная веб-камера. На верхней части устройства располагается сигнальная лампа и индикатор питания. Также имеется освещение. За него отвечают фары, расположенные как спереди, так и сзади устройства. На нижней части робота имеется отверстие для батареек и кнопка включения, кнопка Reset и SSID адрес.
Перед началом использования такого устройства нужно установить специальное приложение «I-spy Toys». Данное приложение для пользователей является бесплатным. После того, как приложение готово к работе, нужно включить игрушку с помощью переключателя на нижней части устройства. После этого загорается индикатор питания, расположенный слева от камеры. Спустя одну минуту справа от видеокамеры загорится и будет мигать лампочка. Такой сигнал говорит о том, что робот обнаружил сеть wi-fi. Для того, чтобы подключить робота нужно в настройках используемого устройства выполнить сопряжение. Для этого потребуется SSID адрес, который имеется на самой игрушке. О правильно выполненном подключении говорит наличие изображения в установленном приложении. Кнопка Reset предназначена для перезагрузки устройства.
Картинка в приложении передается в онлайн режиме. Радиоуправление игрушкой выполняется путем нажатия необходимых кнопок в приложении. В нем имеются кнопки для передвижения, для фотосъемки с сохранением изображения, для видеозаписи, а также для просмотра полученной информации. Радиоуправляемый робот «i-spy Tank» не имеет встроенного микрофона для осуществления аудиозаписи.
blog.cambat.ru
Строим гусеничного Bluetooth-робота с камерой. Часть 2 / Habr
Часть 1Часть 3
Продолжаем строить гусеничного робота.
В первой части мы с вами подобрали и, надеюсь, заказали все необходимые детали. Кстати, недавно проверял, все детали Tamiya (гусеницы, площадки, мотор-редукторная коробка) были в наличии в Terraelectronica. Подороже, конечно, чем из Китая, но зато рядом.
Те, кто уже получил детали, наверняка уже собрали шасси.
Теперь займемся бортовой электроникой, видеоподсистемой и питанием.
Bluetooth
Моторы уже подключены к MotorShield. Пора установить связь с ПК.
Для этого берем Bluetooth модуль и подключаем его пины T и R к пинам 0(Rx) и 1 (Tx) Arduino. + и — подключаем соответственно к пинам +5 и GND. Не перепутайте полярность питания — модуль может сгореть.
При подаче питания на Arduino модуль должен мигать светодиодом — он готов к подключению.
Идем на ПК, ищем bluetooth устройство с именем «linvor» — это имя модуля по умолчанию. В дальнейшем его, как и скорость работы можно изменить с помощью AT команд. (В частности, я свой настроил на 115200 вместо 9600 и дал имя «BT1»). Спариваем ПК с модулем, используя код «1234». В системе должно появиться 2 COM порта — один для исходящих соединений, другой для входящих. Нас интересует именно первый.

Выпишите номер COM порта, он нам пригодится потом для подключения. Если портов в свойствах устройства два и вы не можете определить который исходящий, запишите оба, определите позже методом тыка.
Видеоподсистема
Сначала я заказал вот такой комплект:

Но при попытке избавиться от толстого шнурка, я спалил камеру. Если вы аккуратнее, то все, что вам нужно, это закрепить камеру на роботе винтиком и подать на нее 12В (от 9В у меня вопреки заявляениям китайцев не работает). Передающая часть готова.
Для приемной части есть два пути — купить маленький телевизор на 4-7″ (я себе недавно такой купил) или подключить к ПК/ноутбуку.
Для второго варианта нам понадобится подключить EasyCAP к ПК, поставить драйвер и установить любую программу, которая может выводить изображение с устройства видеозахвата. Я использую DScaler.
А для того, чтобы удобнее было пользоваться, ресивер и EasyCAP я встроил в коробку от комлекта ресивера с камерой. Туда же можно положить аккумулятор для питания ресивера. Для этого в задней стенке прорезал отверстия под разъем антенны, ручки подстройки ресивера и под USB разъем EasyCAP.
Внутри коробки соединяем выходы ресивера со входами CVRS и Audio (если есть микрофон на камере). Предварительно сняв ручку и антенну, просовываем в отверстия ресивер и EasyCAP. Крепим к дну двусторонним или обычным скотчем оба девайса.

«1.2GHz Receiver+EasyCAP»
Снаружи навинчиваем антенну и надеваем колпачок и ручку. Подключать EasyCAP к ПК или ноуту будем комплектным удлинительным шнурком.

«1.2GHz Receiver+EasyCAP»
На этом этапе полезно подать питание на камеру, включить ресивер и попробовать в DScaler сначала подключиться к EasyCAP (устройство видно как USB VideoGrabber) а затем ручкой настройки на ресивере поймать сигнал с камеры.
Если все собрано правильно, поздравляю — видеотракт готов, можно побаловаться с ним.
Pan&Tilt
Если вы заказали поворотно-наклонную (PanTilt) площадку и сервоприводы, то нужно собрать подвес камеры. Все соединения делаются обычным суперклеем, но будьте осторожны, сервоприводы приклеиваются намертво! Поэтому стоит проверить все дважды.
Камеру на площадку крепим разъемом вниз, в сторону поворотной (Pan) сервы.
Перед установкой камеры, найдите среднее положение поворотного сервопривода и надев качалку в этом положении так, чтобы камера смотрела вперед, прикрутите шурупом.
К поворотному сервоприводу я вырезал из белого акрила скобу, с помощью которой немного удобнее крепить к площадке всю конструкцию. можно напрямую длинным винтиком М3 или с помощью П-образной детальки конструктора, как у меня:

К самой скобе сервопривод крепится комплектными шурупами. В конструкторе винтики М4, поэтому мне пришлось немного рассверлить отверстия в плате.
Сервоприводы подключаем так: коричневый и красный провод — +5 и Gnd соответственно, оранжевый — сигнал управления. Сигнальный провод сервы вращения подключаем к пину D10 Arduino, сигнальный провод сервы наклона камеры — к пину D9. На sensor shield есть удобные трехконтактные разъемы GND,VCC,Dx для каждого цифрового пина Arduino. Сделаны специально для такого случая — штекер сервы подключается напрямую без дополнительных проводков.
Так как я спалил свою камеру, да и качество ее не особо высокое было, то я купил модуль Sony 1/3″ CCD
К счастью, передатчик убитой камеры уцелел и я припаял его напрямую к камере Sony, аккуратно выпаяв его из сгоревшей дешевой камеры.
Питание камеры и передатчика я объединил, припаяв на один штеккер и затянув в термоусадку.
У передатчика желтый провод — видеовход, белый — аудиовход, красный и черный как обычно — + питания и земля, но питание от преобразователя, встроенного в шнурок, поэтому нужно запомнить какой провод шел к передатчику, когда отпаивать будете. У меня получилось вот так:
«Sony CCD camera & 1.2GHz Transmitter»
Передатчик греется во время работы, но это особенность его конструкции, что-то там китайцы намудрили с питанием, видимо.
Питание
Моторы и Arduino мы будем питать от одного источника, для этого переключатель Ext/Ard на MotorShield установим в положение Ard. Теперь напряжение 7-12В можно подать через стандартный разъем питания Arduino или через клеммник на MotorShield.
Для питания камеры и передатчика можно использовать либо отдельный аккумулятор на 12В

К сожалению, в описании на HK ошибка — от 2S он не работает, все равно нужно 12в (3S)и более на входе.
Аккумулятор устанавливаем на первом этаже. Спереди этажи можно скрепить металлической скобой из конструктора, чтобы второй этаж не болтался.
Ура, аппаратная часть готова. Осталось написать прошивку для микроконтроллера и программу для ПК.
P.S. Вопрос — на новогодних каникулах кто-нибудь собирается этим заниматься или отложить написание последней статьи на середину января?
habr.com
Роботы на съемочной площадке
В настоящее время роботы широко применяются на съемочных площадках по всему миру. Системы контроля движений камеры используются для обеспечения высокой точности и плавности съемок, повторов траектории движения камеры и создания уникальных эффектов. Беспилотники используют для бюджетных съемок с воздуха. В этом они успешно заменяют дорогие в эксплуатации вертолеты. Роботы нередко применяются в производстве различной кинопродукции. Механизированные аниматронные куклы используют для съемок “несуществующих” объектов. Эта технология пришла на смену покадровой съемке.
Появление систем контроля движения камеры (camera motion control systems) стало одной из вех развития технологической составляющей киноиндустрии. Профессиональные устройства контроля включают роботизированную панорамную головку, кран-тележку и операторский кран — три в одном.
Источник картинки
Источник картинки
Панорамная головка обеспечивает устойчивость и резкость при съемках в труднодоступных местах, повторяемость движений камеры. Роботизированные операторские краны повышают плавность съемки.
Источник картинки
Автоматические приводы позволяют оператору дистанционно управлять камерой, заблаговременно программировать траекторию перемещения. Система фиксирует и сохраняет все параметры камеры в конкретный момент времени, включая, в частности, фокусное расстояние и позицию. Сохраненные данные используются для воспроизведения траектории движения камеры. Благодаря этой технологии, можно снимать по-отдельности различные объекты. После комбинирования они выглядят так, словно были сняты в одном и том же месте в одно и то же время.
Вне зависимости от технологии совмещения в одном кадре нескольких изображений, для их последовательной съемки нужно, чтобы камера перемещалась по одной и той же траектории. Человек-оператор справиться с этим может разве что в самых простых случаях, тогда как роботизированной системе по плечу многократное воспроизведение самой замысловатой траектории с одновременным изменением различных параметров.
Первое масштабное применение повтора движений камеры относится к 1975 году. Режиссер «Звездных войн» Джордж Лукас создал ряд эпизодов, в которых модели космических кораблей приближались, “пролетали” мимо и удалялись от камеры, которая разворачивалась за ними на 180 градусов. Возможности подобных съемок были ограничены – не было системы, способной запомнить и точно воспроизвести столь сложные движения камеры. Требовалось создать механизм, который мог бы записывать информацию о траектории камеры и воспроизводить её через несколько дней. Так появилась система Дайкстрафлекс (Dykstraflex), записывающая одновременно скорость движения камеры, её положение, фокусное расстояние объектива, углы поворотов, зум и т.д.
Источник картинки
Каждое движение камеры программировалось отдельно: сдвиг вперед, панорамирование, повороты по вертикали. Названная в честь своего разработчика Джона Дайкстра (John Dykstra) установка использовалась, например, для съемок битв между несколькими космическими кораблями. В 1978 году Джону Дайкстра и двум соавторам «Дайкстрафлекс» был вручен Оскар за технические достижения.
Сегодня многие компании производят мобильные и предназначенные для павильонных съемок роботизированные механизмы, управляющие движениями камеры. Технические решения для управления движением камеры, пришли в кинематограф из промышленности, где роботы уже обладали требуемой точностью движений. Современные аппараты могут контролировать и записывать движения по 13 осям, управляют зумом, фокусом и экспозицией.
Специализированные роботы активно используются для съемки сложных рекламных роликов, добавляя им реализма.
Управление некоторыми роботами со временем становится все проще и интуитивнее. К примеру, оператор может просто переместить камеру и “показать” ей движение, которое необходимо воспроизвести. Подобная система “программирования” обеспечивает быструю переналадку робота.
На съемочной площадке фильма «Трансформеры 4: Эпоха истребления» использовался промышленный робот KUKA Robotics, обеспечивающий пространственные перемещения камеры.
Система контроля движения камеры Milo способна двигаться со скоростью более двух метров в секунду, и с высочайшей точностью. Кроме того, система способна автоматически удерживать объект съемки в фокусе.
Источник картинки
Роботизированные системы контроля движения камеры серьезно облегчили труд оператора. Например, при съемке погони в пыли и песке, человек может находиться на удалении от робота — с процессом справится автоматика.
Для съемок фильма «Гравитация» была создана роботизированная система освещения «Light Box» из 196 панелей, на каждой из которых размещалось 4096 светодиодных ламп. Система позволяла мгновенно менять углы освещения, создавая иллюзию смещения актеров относительно источников света и отражающих поверхностей. Каждая сцена синхронизировалась с заранее заготовленной компьютерной графикой, которую проецировали на стены помещения — необходимую точность могли обеспечить лишь роботы.
Источник картинки
Источник картинки
На сегодняшний день состоялось несколько кинофестивалей, где можно было посмотреть видеосюжеты, снятые при помощи беспилотных летательных аппаратов. Можно припомнить, например, Нью-Йоркский Drone Film Festival и Flying Robot International Film Festival в Сан-Франциско, а также фестиваль Rise of the Drones, специализирующийся на экстремальных видах спорта.
Использование наземных роботов и летающих дронов при съемках познавательных программ о природе и жизни диких животных не пугает зверей и гарантирует безопасность операторов. Канал National Geographic использовал радиоуправляемых колесных роботов для уникальных съемок львов. Инфракрасные камеры и дроны позволили операторам снимать животных ночью, в период их активности.
Источник картинки
Источник картинки
Источник картинки
Источник картинки
Выход трейлера к фильму «Мир Юрского периода» сопровождался рядом критических отзывов, связанных с тем, что в классической картине 1993 года динозавры выглядели более реалистично. В «Парке Юрского периода» из 14 минут с участием динозавров, лишь в течение 4 минут использовалась компьютерная графика. В остальное время, включая знаменитую сцену с тираннозавром, Стивен Спилберг полагался на аниматронику — методику создания сложных макетов и кукол, покадровая съемка которых неэффективна.
Для фильма было сконструировано несколько полноразмерных телеуправляемых роботизированных динозавров. Мощные гидравлические приводы позволили «ящерам» двигаться и разевать клыкастые пасти. Робот-тираннозавр мог совершать до 57 видов движений. Для управления десятками актуаторов требовалась автоматизированная система. Обычные пульты дистанционного управления не обеспечивали требуемый функционал. Пришлось создать мини-копию динозавра, размером с большую собаку. Ее движениями управляли вручную, а компьютер преобразовывал информацию в управляющие сигналы для актуаторов многотонного рободинозавра.
Некоторые аниматронные модели, использующиеся на съемках, были настолько сложными, что для управления ими требовалось несколько операторов, отвечающих за мимику, движения туловища, лап, челюстей и т.д. При съемке сцены с трицератопсом в «Парке» движения куклы контролировались одиннадцатью людьми, сидящими в яме, вырытой под тушей «животного». Самым маленьким роботом оказался крошечный динозаврик, вылупляющийся из яйца на глазах у ученых. Настоящий шедевр аниматроники — спинозавр из третьего «Парка Юрского периода» — весил 12 тонн.
Кроме динозавров, создаются и другие аниматронные модели, например реалистичная модель младенца. Подобные роботы существенно упрощают съемки — не нужно упрашивать родителей, робот не устает и не капризничает.
Одна из основных проблем использования в кино аниматронных персонажей — недостаток времени для изготовления кукол. В сравнении с компьютерной графикой у аниматроники есть один неисправимый недостаток: многие роботы огромны и обладают значительным весом.
++
С каждым годом роботы занимают все более значимые позиции на съемочной площадке — помогают снимать кино и сами выступают в роли актеров. Нет сомнений, что с каждым следующим годом их роль будет только возрастать, позволяя снимать все более впечатляющие сюжеты, а также упрощая и повышая экономическую эффективность процесса съемок.
Использованные источники и публикации по теме:
http://www.mirf.ru/Articles/print466.html
http://mozhenko.blogspot.ru/2009/02/blog-post.html
http://ci-ne-ma.diary.ru/p102712430.htm
http://snimifilm.com/post/sistema-kontrolya-dvizheniya-kamery
http://www.robo-geek.ru/letayuschie-roboty/dji-otkryvaet-kinofestival-ekstremalnyh-semok-s-ispolzovaniem-dronov
http://www.liveinternet.ru/users/fedel/post249784966/
http://www.filmpro.ru/materials/18811
http://russia.tv/article/show/article_id/4394/
http://www.5-tv.ru/news/50058/
http://www.mirf.ru/Articles/print5972.html
http://www.digitaltrends.com/movies/gravity-director-alfonso-cuaron-on-how-to-creatively-fake-zero-gravity/#!yg1O7
robotrends.ru
Автоматизированное видеонаблюдение на роботах / Ivideon corporate blog / Habr

На днях в США мужчина устроил драку с роботом. Робот K5 компании Knightoscope мирно патрулировал парковку, когда пьяный совершил подлое нападение. Беспомощная машина весом около 140 килограммов упала на бок и не смогла подняться без посторонней помощи – у нее нет оружия, рук и подходящей программы.
Случай с K5 не единичный (в Японии был такой же борец с машинами) и поднимает много вопросов, касающихся надежности подобных систем. Мы посмотрим на ситуацию со своей колокольни. Робот явно не слепой, в нем есть камеры, помогающие двигаться по маршруту и собирать информацию об окружающем мире. Что вообще происходит в сфере видеонаблюдения на самоходных машинах?
Knightoscope K5
Knightscope показала робота-охранника K-5 в 2013 году и с тех пор проводит тестовые испытания. K5 оснащён системой камер, записывающих видео на 360 градусов вокруг. Похожий на R2D2 робот распознает лица и номера машин (определяет до 300 номеров в минуту), выявляет наличие оружия и даже понимает, когда поведение людей отклоняется от нормы. Он способен передвигаться, избегая столкновений, по различным участкам, преодолевать минимальные препятствия и патрулировать населенные пункты по тротуарам.
Яйцеподобные роботы прошли более 35 000 часов испытаний и 25 000 миль пробега по торговым центрам, автостоянкам и производственным объектам. И все же без инцидентов с ними не обошлось: кроме случая с нападения хулигана, один из роботов не мог избежать столкновения с 16-месячным ребенком – хотя робот видел малыша, он не просчитал последствия возможного столкновения.
Cobalt Robotics
Похожий на передвижную вазу для цветов мобильный робот-охранник компании Cobalt Robotics сделан в корпусе, обитом тканью, чтобы как можно дальше уйти от ассоциаций с охранной боевой системой. Cpbalt ориентируется в пространстве, узнает людей по лицам, считывает удостоверения личности и сообщает о любой подозрительной активности и потенциальных проблемах с безопасностью.
Помимо широкоугольных камер ночного и дневного видения, в нем есть 60 датчиков, LIDAR и RFID, микрофон, детекторы дыма и CO2. Благодаря этому арсеналу робот умеет различать, должен ли человек быть в здании на данный момент или нет, обнаруживает открытые и закрытые двери и окна (может даже распознать звук разбитого окна), находит протекающий кран, замечает пожар и даже обращает внимание на предметы, не лежащие на своих привычных местах.
Военные роботы
Разработчики из (внезапно) Ирландии создали компанию, предлагающую роботизированные системы для обезвреживания взрывоопасных веществ и видеонаблюдения. Основное преимущество по сравнению с конкурентами – это использование проверенных временем технологий при значительном (по заверению разработчиков) снижении стоимости комплектующих.
Этот маленький робот, похожий на игрушку, выглядит очень хрупким из-за своих размеров, но внешность обманчива. MAARS сочетает миниатюрность с большим количеством огневой мощи. Модульная конструкция позволяет оснащать его разнообразными оружием: от нелетальных лазеров (предназначенных для ослепления врагов) до слезоточивого газа и даже гранатомета.
Не каждый военный робот должен обладать огневой мощью. Разведка – важная часть военных операций и маленький Guardbot как раз построен для тайной деятельности. Первоначально разработанный для гипотетической исследовательской миссии на Марс, Guardbot оснащен камерами и может перемещаться по различным поверхностям (снег, песок и даже вода для него проходимы).
Разработанный для помощи корпусу морской пехоты США, беспилотный «Гладиатор» выглядит как маленький танк и может комплектоваться различными типами вооружений (как с удаленным управлением, так и ручным – солдатом прямо на поле боя). При небольшой скорости движения (не более 20 км/ч), Gladiator обладает мощным бронированным корпусом.
Не забудем про боевых роботов Samsung, охраняющих границу Южной Кореи. Робот SGR-1 оснащен радаром, прибором ночного видения, камерами. Оружие робота — 5,5-миллиметровые пулеметы и 40-миллиметровые автоматические гранатометы.
Presence и Ohmni для дома
Все вышеперечисленные устройства могут позволить себе только крупные компании или государственные институты, но роботизированное видеонаблюдение востребовано и для домашнего использования. Компания People Power представила устройство Presence 360, которое сами разработчики называют «первым в мире роботом для камеры видеонаблюдения с углом обзора 360°».
Presence 360 представляет собой турель, на которую устанавливается смартфон, который вы оставляете дома, чтобы контролировать безопасность с помощью камеры. Специальное приложение присылает вам уведомление, если камера обнаруживает движение.
Робот контролировать безопасность в запрограммированных точках на заранее указанный промежуток времени – поддерживается до трех точек обзора, охватывающих виды на (к примеру) входную дверь, дверь черного хода и кухонное окно.
Минус такого решения очевиден – камера никак не перемещается по дому. Возможно, стоит установить ее на управляемую через интернет платформу с колесами?
Компания OhmniLabs показала передвижного робота Ohmni, оснащенного двумя камерами видеонаблюдения и планшетом – фактически, это версия робота телеприсутствия, адаптированная для домашнего использования, а не для видеоконференций в офисе.
Наблюдение за дикой природой
Камеры наблюдения и фото-ловушки – это важная часть исследований в природе, и в некоторых случаях единственный способ увидеть дикое животное в естественной среде обитания. Но у камер есть существенный недостаток – они не вызывают никакого интереса у четвероногих, и нельзя заставить животное позировать на камеру. Проблему может решить серия адаптированных роботов-наблюдателей.
Новые роботы с камерами максимально похожими на тех, за кем наблюдают. Камера видеонаблюдения скрыта в одном из глаз робота. Роботы воспроизводят такие же движения, что и животные, обладают хвостами и ушами, которыми могут шевелить. Правда ничего не сообщается о запахе, а ведь с помощью носами многие животные исследует незнакомцев.
Робот-доставщик
В прошлом году Starship Technologies начала испытания своих роботов автономной доставки в 40 городах и 12 странах. Боты успешно пересекают тротуар, избегают препятствий, объезжают пешеходов. Скорость движения в среднем равна шести с половиной километрам в час, а перевозить он может до одиннадцати с половиной килограммов груза.
У робота девять камер видеонаблюдения, расположенных спереди и сзади. Они позволяют не только двигаться по заданному курсу, но и защищают от людей, помогая заснять лица тех, кто может угрожать роботу.
Intellos Sharp
Робот Sharp обрабатывает данные от камер и датчиков, замеряющих состав окружающей воздушной среды. Подвижная опора поднимает одну из камер на высоту человеческого роста, что дает роботу возможность заглядывать поверх препятствий. Гибкая технологическая платформа ASI позволит в будущем легко дополнять устройство новыми системами.
Робот может вести наблюдение круглосуточно: выявлять нежелательные объекты и нештатные ситуации, отсылать отчеты о своей деятельности, фиксировать подозрительные событиях. При этом робот может действовать автономно либо в составе команды. Кроме того, робот оснащен системой «отпугивания» нарушителей – для этого в нем есть сирена, мигающие огни и возможность голосового оповещения.
— Большинство из новых образцов «наблюдательной» робототехники пока проходят тестирование в различных условиях, однако уже можно сделать вывод, что за роботизированным, автономным, подвижным видеонаблюдением – будущее. Со временем Ivideon обязательно примет участие в развитии этой сферы. Пока же мы предлагаем стационарные решения для дома и для бизнеса. Впрочем, на следующей неделе у нас наконец-то появятся активные поворотные камеры для дома, а там и до колесных платформ близко.
habr.com
Робот телеприсутствия на Arduino и Android за 2600р, 100 строчек кода и 5 вечеров.
В этом семестре я ходил на курс, посвященный Arduino, и захотелось мне сделать что-нибудь такое несложное, но тем не менее интересное. И пришла идея сделать робота с камерой, которым можно управлять удаленно через интернет, просматривать картинку с камеры и разговаривать с людьми. Идея родилась под влиянием лекции, на которой представители стартапа endurancerobots.com показали действующего робота телеприсутствия, собранного их гениальным инженером на коленке за неделю. Это действительно гениально, я потратил несколько вечеров, но не смог придумать ничего проще. Поэтому идея полностью взята у них (схема, настройка ПО), отличие только в микроконтроллере.
Ездящих роботов я уже делал, поэтому управление моторами с помощью Arduino — это простая и знакомая мне задача.
Добавим сюда распространенное многофункциональное устройство — телефон на Android, который имеет встроенную камеру, микрофон, динамик и аж несколько способов подключения к интернету: WiFi и 3G. На телефон можно установить любую программу для видеосвязи, например Linphone, что избавляет нас от написания своего софта для передачи видео и голоса. Фишка решения в том, что управление осуществляется также через Linphone посредством DTMF сигналов, это знакомые вам сигналы тонового набора для телефонных линий. Управляющий Linphone на компьютере позволяет с помощью цифровой клавиатуры отправлять DTMF коды, а Linphone-клиент на телефоне их принимать и записывать данные события в системный лог. Например, принятый DTMF сигнал «1» оставляет в логе такую строчку:
D/Linphone( 5727): DTMF received: 49
А если на Android включить debug mode, то системный лог можно читать по USB через службу ADB. Также можно использовать появившийся позже протокол ADK, разработанный Google для взаимодействия Android с периферией. Но я не разобрался, как им по-простому читать логи.
Дело за малым — соединить между собой телефон и Arduino и добраться до заветной ADB. После рассмотрения всех возможных вариантов оказалось, что несмотря на то, что и на телефоне и на Arduino имеется USB порт, на большинстве телефонов (в отличие от планшетов) он работает в режиме slave, для соединения же двух девайсов по USB один из них должен быть в режиме USB host, т.е. без специальных плат для соединения Arduino и Android все равно не обойтись. Таковых было найдено минимум две: IOIO и USB Host Shield 2.0, так же было найдено множество библиотек к ним. Для расписанного выше сценария нам идеально подходит плата USB Host Shield 2.0 с библиотекой microbridge, в которой даже есть программка-пример для чтения логов с телефона, т.е. нам и кодить-то почти ничего не надо! Однако, библиотека сразу не заработала, заглянув в исходники и заставив ее выводить сообщения для отладки, я выяснил, что телефон не коннектится к Arduino. Видимо, из-за того, что библиотека была написана под древний «Android >1.5» и, увы, не обновлялась с 2011 года. Тут надо сказать, что схема робота была продумана заранее, выбраны соответствующие компоненты и библиотеки, и робот уже практически собран, а неработающая библиотека означала фейл всей схемы. Я уже начал было гуглить спецификацию протокола ADB, чтобы исправить библиотеку, но, везению моему не было предела, потому что я нашел версию microbridge, доделанную добрым человеком для работы с Android >=4.2!
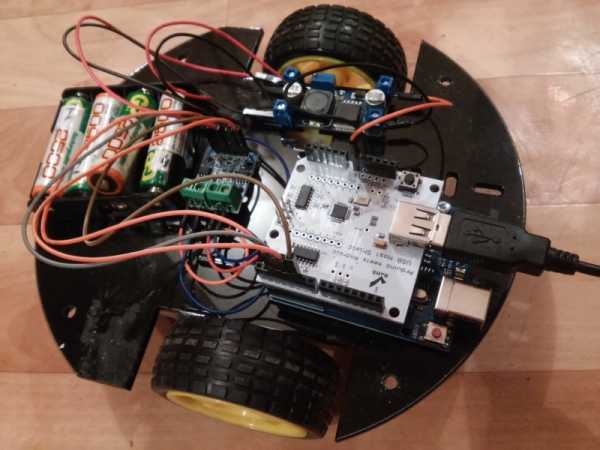
USB Host Shield легко соединяется с Arduino. Arduino управляет моторами через контроллер. Батарея аккумуляторов выдает 5-6 В, а моторы рассчитаны на 3-6 В, поэтому контроллер моторов питается напрямую от батареи, а Arduino — через преобразователь, повышающий напряжение до 8 В.
Омниколесо, поставлявшееся вместе с платформой не крутилось и заедало, пришлось заменить его на мебельное колесо из леруа-мерлен (оо, там их огромный выбор).
Целый вечер потратил на придумывание и выпиливание держателя для телефона, который позволял бы закреплять на нем телефоны разных размеров, в том числе планшеты. В итоге сделал только раму и нижнее крепление. А потом догадался вместо верхнего крепления прилепить на раму двусторонний скотч. Все! Держится! Скотч — это вещь!
Cписок использованного оборудования
Платформа с колесами и моторами — 1000р
USB Host Shield 2.0 (китайский) — 700р
Телефон LG L90 с Android 4.4.2 и программой Linphone (использовал свой, в стоимость не входит)
Arduino Uno (китайская), контроллер моторов, DC-DC преобразователь напряжения — 700р
4 аккумулятора АА и зарядное устройство (имелись)
Мебельное омниколесо и алюминиевый профиль из леруа-мерлен — 200р
Программа для Arduino доступна на github
Программа для Android — 0 строчек
Руки, голова, паяльник и инструменты.
Компьютер для удаленного управления роботом.
Как подключиться к роботу
(Написано для примера, естественно, мой робот обычно выключен.)
Скачайте и установите программу для видеосвязи Linphone, имеются версии для всех популярных настольных и мобильных операционных систем, в том числе для Windows, Linux, Mac, Android. После установки откроется помощник настройки аккаунта. В версии для компьютера он находится в меню Help -> Account assistant. С его помощью создайте новый аккаунт на linphone.org или введите данные для имеющегося SIP аккаунта.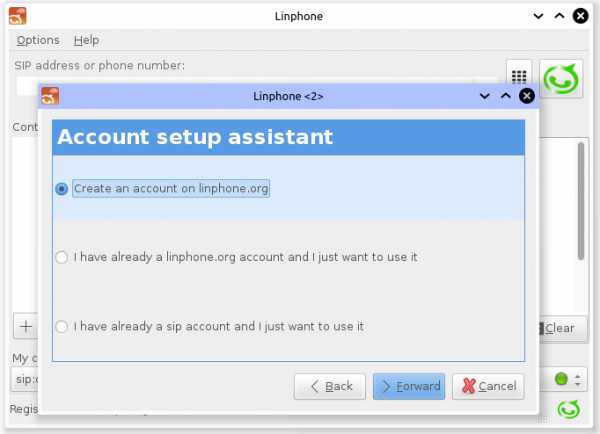
Можете сделать тестовый звонок на sip:[email protected], но лично у меня видео так не работает.
Позвоните на [email protected], включите видеосвязь и клавиатуру для тонового набора.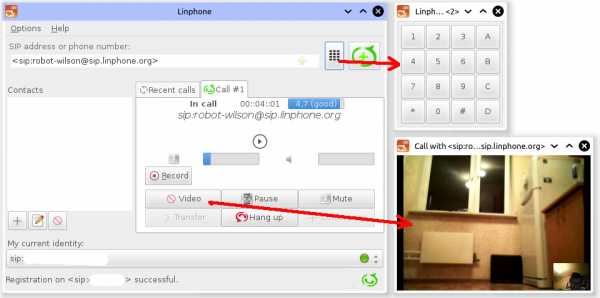
Управление:
2 — вперед
4 — влево
6 — вправо
8 — назад
Все, можно ездить!
Существующие баги: бывает, что команды пропускаются.
mdemetrio.livejournal.com
