Как использовать ROBOTC для программирования роботов VEX. Какие возможности предоставляет ROBOTC 4.0 для работы с датчиками цвета. Каким образом можно реализовать обратную связь при обнаружении цветов на VEX роботах.
Что такое ROBOTC и для чего он используется в робототехнике
ROBOTC — это мощный язык программирования роботов, разработанный специально для образовательной робототехники. Он предназначен в первую очередь для программирования роботов на платформах LEGO MINDSTORMS NXT и VEX Robotics.
Основные особенности ROBOTC:
- Основан на языке C, что облегчает переход к «взрослому» программированию
- Имеет удобную среду разработки с отладчиком
- Позволяет создавать сложные алгоритмы управления роботами
- Поддерживает работу с различными датчиками и моторами
- Имеет обширную библиотеку готовых функций для типовых задач
ROBOTC активно используется в образовательных учреждениях для обучения основам робототехники и программирования. Его применяют при подготовке к соревнованиям роботов, таким как FIRST Tech Challenge.
Обзор новых возможностей ROBOTC 4.0 для VEX Robotics
Версия ROBOTC 4.0 для платформы VEX Robotics предоставляет ряд важных улучшений:
- Улучшенная поддержка датчиков цвета VEX
- Расширенные возможности отладки программ
- Новые функции для работы с серводвигателями
- Оптимизированный генератор кода для более быстрого выполнения программ
- Обновленный симулятор виртуальных роботов
Одним из ключевых нововведений стала улучшенная поддержка работы с датчиками цвета. Теперь разработчики могут легко считывать данные о цвете и использовать их для реализации различных алгоритмов управления роботом.
Работа с датчиками цвета в ROBOTC 4.0
Датчики цвета позволяют роботу определять цвет поверхностей или объектов. В ROBOTC 4.0 появились новые функции для удобной работы с этими датчиками:
getColorSensor()— получение «сырых» данных с датчика цветаgetColorHue()— определение оттенка цветаgetColorSaturation()— определение насыщенности цветаgetColorValue()— определение яркости цвета
Пример использования датчика цвета для определения цвета поверхности:
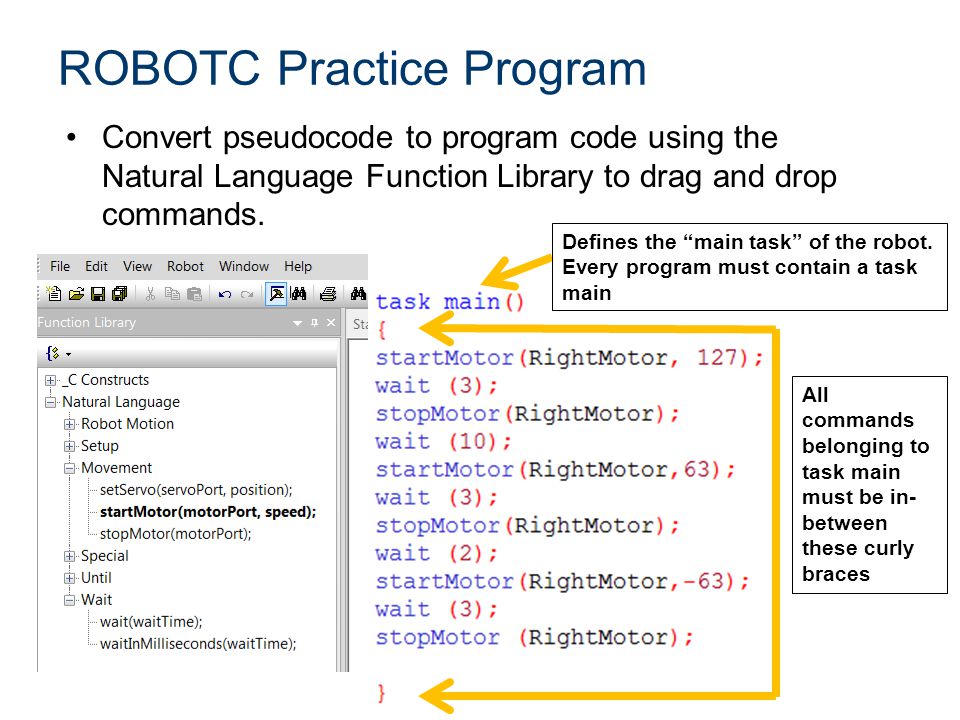
task main()
{
while(true)
{
int hue = getColorHue(colorSensor);
if(hue < 30)
displayString(1, "Red");
else if(hue < 90)
displayString(1, "Yellow");
else if(hue < 150)
displayString(1, "Green");
else
displayString(1, "Blue");
wait1Msec(100);
}
}
Этот код непрерывно считывает оттенок цвета с датчика и выводит название обнаруженного цвета на экран робота.
Реализация обратной связи при обнаружении цветов
Одно из важных применений датчиков цвета — реализация обратной связи для управления движением робота. Например, робот может двигаться по линии определенного цвета или останавливаться при обнаружении препятствия заданного цвета.
Пример программы движения по черной линии:
task main()
{
while(true)
{
int value = getColorValue(colorSensor);
if(value < 30) // Черный цвет
{
setMotorSpeed(leftMotor, 50);
setMotorSpeed(rightMotor, 50);
}
else
{
setMotorSpeed(leftMotor, 30);
setMotorSpeed(rightMotor, 70);
}
wait1Msec(10);
}
}
Здесь робот движется прямо, если датчик обнаруживает черный цвет линии. При съезде с линии робот поворачивает, чтобы вернуться на нее.

Продвинутые алгоритмы обработки цвета в ROBOTC
ROBOTC 4.0 позволяет реализовывать более сложные алгоритмы обработки данных с датчиков цвета. Например, можно использовать фильтрацию для устранения шумов или применять нечеткую логику для более точной классификации цветов.
Пример реализации простого медианного фильтра для сглаживания показаний датчика:
#define BUFFER_SIZE 5
int colorBuffer[BUFFER_SIZE];
int bufferIndex = 0;
int getFilteredColor()
{
int sum = 0;
for(int i = 0; i < BUFFER_SIZE; i++)
{
sum += colorBuffer[i];
}
return sum / BUFFER_SIZE;
}
task main()
{
while(true)
{
colorBuffer[bufferIndex] = getColorValue(colorSensor);
bufferIndex = (bufferIndex + 1) % BUFFER_SIZE;
int filteredColor = getFilteredColor();
// Использование отфильтрованного значения
wait1Msec(10);
}
}
Такой подход позволяет снизить влияние случайных выбросов в показаниях датчика и сделать поведение робота более стабильным.
Интеграция обнаружения цветов с другими системами робота
Данные с датчиков цвета можно эффективно использовать в сочетании с другими системами робота. Например, информацию о цвете можно комбинировать с данными от ультразвуковых дальномеров или гироскопов для более точной навигации.
Пример программы, использующей датчик цвета вместе с энкодерами двигателей для точного позиционирования:
task main()
{
int targetDistance = 1000; // Целевое расстояние в тиках энкодера
int startPosition = nMotorEncoder[leftMotor];
while(nMotorEncoder[leftMotor] - startPosition < targetDistance)
{
int hue = getColorHue(colorSensor);
if(hue < 30) // Красный цвет - препятствие
{
stopAllMotors();
playSound(soundBeepBeep);
break;
}
setMotorSpeed(leftMotor, 50);
setMotorSpeed(rightMotor, 50);
wait1Msec(10);
}
stopAllMotors();
}
Здесь робот движется на заданное расстояние, но останавливается, если встречает красное препятствие. Это демонстрирует, как можно объединить данные от разных датчиков для создания более интеллектуального поведения робота.
Советы по оптимизации программ с использованием датчиков цвета
При работе с датчиками цвета в ROBOTC важно учитывать некоторые моменты для создания эффективных и надежных программ:
- Калибровка датчиков: Перед использованием датчиков цвета необходимо провести их калибровку для текущих условий освещения. ROBOTC предоставляет функции для автоматической калибровки.
- Частота опроса: Не стоит опрашивать датчик слишком часто, это может привести к замедлению работы программы. Обычно достаточно считывать данные 10-20 раз в секунду.
- Фильтрация данных: Применение фильтров (например, медианного или экспоненциального сглаживания) поможет устранить шумы и сделать показания более стабильными.
- Использование пороговых значений: Вместо жестко заданных границ цветов лучше использовать адаптивные пороговые значения, которые могут подстраиваться под условия освещения.
- Комбинирование с другими датчиками: Для повышения надежности рекомендуется использовать данные от нескольких типов датчиков.
Следуя этим рекомендациям, вы сможете создавать более надежные и эффективные программы для роботов VEX с использованием ROBOTC 4.0.
LEGO Mindstorms NXT — ссылки
- Подробности
- 11.03.2010 13:24
- www.mindstorms.com – официальный сайт компании ЛЕГО;
- www.mindstorms.su– неофициальный российский сайт LEGO Mindstorms;
- http://www.int-edu.ru/object.php?m1=608&m2=2&id=891– вводный курс LEGOMindstorms NXT на русском языке;
- http://www.lugnet.com/– форум пользователей LEGO Mindstorms NXT;
- http://www.nxtprograms.com/ – примеры разработок роботов из LEGO MindstormsNXT.
Языки и среды программирования для LEGO Mindstorms NXT:
- NBC/NXC (Next Byte Codes & Not eXactly C):
- Компилятор и документация к NBC: http://bricxcc.sourceforge.net/nbc/.
- Интегрированная среда разработки: http://bricxcc.sourceforge.net/.
- Среда LabVIEW для LEGO Mindstorms NXT: www.ni.com/mindstorms.
Интернет-ресурсы по LEGO Mindstorms NXT из книги David Perdue, «Unofficial Lego Mindstorms NXT Inventor’s Guide».

(см. сайт http://nxtguide.davidjperdue.com/)
Общие ресурсы
- Обновления программ: http://mindstorms.lego.com/support/updates
- NXTreme: http://mindstorms.lego.com/overview/nxtreme.aspx
- NXTLOG: http://www.mindstorms.com/nxtlog
- LUGNET: http://www.lugnet.com
- MOC pages: http://www.mocpages.com
- Brickshelf: http://www.brickshelf.com
- Peeron LEGO Inventories: http://www.peeron.com
- Brickset: http://www.brickset.com
- Fun Projects for your LEGO MINDSTORMS NXT: http://www.nxtprograms.com/index.html
- MINDSTORMS NXT Building Instructions: http://ricquin.net/lego/instructions/
- Technica: http://isodomos.com/technica/technica.html
- Blackbird’s Technicopedia: http://www.ericalbrecht.com/technic
Ресурсы для программистов:
- Which approach is best for you? NBC and NXC: http://bricxcc.sourceforge.net/nbc
- NBC Debugger for NXT: http://www.
 sorosy.com/lego/nxtdbg
sorosy.com/lego/nxtdbg - BricxCC: http://bricxcc.sourceforge.net
- Programmable Brick Utilities: http://bricxcc.sourceforge.net/utilities.html
- leJOS NXJ: http://lejos.sourceforge.net
- RobotC: http://www.robotc.net
- Writing Efficient NXT-G Programs: http://www.firstlegoleague.org/sitemod/upload/Root/WritingEfficientNXTGPrograms2.pdf
- OnBrick NXT Remote Control: http://www.pspwp.pwp.blueyonder.co.uk/science/robotics/nxt/
- NXTender: http://www.tau.ac.il/~stoledo/lego/NXTender
- NXT Programming Software: http://www.teamhassenplug.org/NXT/NXTSoftware.html
Ресурсы для Bluetooth:
- MINDSTORMS Bluetooth Resources: http://www.mindstorms.com/bluetooth
- NXTBluetoothCompatibilityList:
http://www.vialist.com/users/jgarbers/NXTBluetoothCompatibilityList - Analysis of the NXT Bluetooth-Communication Protocol: http://www.tau.ac.il/~stoledo/lego/btperformance.
 html
html - D-Link: http://www.dlink.com
NXT-Блоги
- The NXT STEP: http://www.thenxtstep.com
- nxtasy.org: http://www.nxtasy.com
- bNXT: http://www.bnxt.com
Ресурсы по автоматизированному конструированию
(LEGO computer-aided design resources):
- LEGO Digital Designer: http://ldd.lego.com
- Google SketchUp NXT Parts Library: http://groups.google.com/group/LegoTechnicandMindstormsNXTParts
- Solid Modeling: http://www-education.rec.ri.cmu.edu/solidmodel
- LDraw: http://www.ldraw.org
- Setting up LDraw to Create Virtual NXT Robots: http://nxtblog.davidjperdue.com
- MLCAD: http://www.lm-software.com/mlcad
- LeoCAD: http://www.leocad.org
- Bricksmith: http://bricksmith.sourceforge.net
- LPub: http://www.kclague.net/LPub
- LSynth: http://www.kclague.net/LSynth
- L3P: http://www.hassings.
 dk/l3/l3p.html
dk/l3/l3p.html - LDView: http://ldview.sourceforge.net
Методы конструирования
(Building techniques)
- TECHNIC Design School: http://technic.lego.com/technicdesignschool
- LEGO Design School: http://creator.lego.com/designschool
- LEGO Education Constructopedia: http://www.lego.com/education/default.asp?l2id=3_3&page=4_1
- Изучаем геометрию LEGO: http://www.syngress.com/book_catalog/174_lego_robo/chapter_01.htm
- LEGO Design: http://www.owlnet.rice.edu/~elec201/Book/legos
- Sergei Egorov’s LEGO Geartrains: http://www.malgil.com/esl/lego/geartrains.html
Образовательные ресурсы
- LEGO Education: http://www.legoeducation.com
- MINDSTORMS Education NXT blog: http://www.legoeducation.com/community/9/blogs/nxt/default.aspx
- LEGO ED West: http://www.legoedwest.com
- LEGO Engineering: http://www.legoengineering.com
- FIRS T LEGO League: http://www.
 firstlegoleague.org
firstlegoleague.org - US FIRS T Curriculum Collection: http://www.usfirst.org/community/fll/content.aspx?id=798
- Robotics Academy: http://www-education.rec.ri.cmu.edu
Наборы LEGO, детали LEGO и заказные детали
(custom hardware)
- LEGO Store: http://shop.lego.com
- LEGO Education Store: http://www.legoeducation.com/store
- BrickLink: http://www.bricklink.com
- HiTechnic: http://www.hitechnic.com
- Mindsensors.com: http://www.mindsensors.com
LEGO storage
- Robotics Learning Store: http://www.roboticslearning.com/store
- Storage and Organizers at the LEGO Education Store: http://www.legoeducation.com/store/SearchResult.aspx?pt=17
- Plano Molding Company: http://www.planomolding.com
Персональные вебсайты
- David J. Perdue: http://www.davidjperdue.com
- Philippe Hurbain: http://www.philohome.com
- Dave Astolfo: http://www.
 astolfo.com
astolfo.com - Daniele Benedettelli: http://daniele.benedettelli.com
- Michael Gasperi: http://extremenxt.com/lego.htm
- Matthias Paul Scholz: http://mynxt.matthiaspaulscholz.eu
- Steve Hassenplug: http://www.teamhassenplug.org
- Brian Davis: http://mindstorms.lego.com/MeetMDP/BDavis.aspx
- Bryan Bonahoom: http://www.funtimetechnologies.com/teamb2
- Laurens Valk: http://www.freewebs.com/laurens200
- Jürgen Stuber: http://www.jstuber.net
- Kevin Clague: http://www.kclague.net
- Mario Ferrari: http://www.marioferrari.org/lego.html
- Miguel Agullo: http://technicpuppy.miguelagullo.net
LEGO events
- LEGO World: http://www.legoworld.nl
- BrickFest: http://www.brickfest.com
- BrickWorld: https://registration.brickworld.us
- NWBrickCon: http://www.nwbrickcon.org
- BrickFair: http://www.brickfair.
 com
com
- < Назад
Код пользователя для программирования и загрузки
| Наиболее мощной функцией VirtualVEX является возможность загрузки программ, созданных пользователями. Вы можете использовать эту функцию для настройки управления драйвером, тестирования новых алгоритмов привода или того и другого. VirtualVEX предназначен для чтения синтаксиса ROBOTC. ROBOTC (www.robotc.net) — популярный язык программирования, используемый многими командами VRC. EasyC, еще один популярный язык для команд VRC, в настоящее время не поддерживается. В основном это связано с тем, что EasyC работает по системе перетаскивания. Тем не менее, поддержка EasyC все еще рассматривается для будущего выпуска. Если ваш программист знает синтаксис ROBOTC (или может легко его выучить), вы почти готовы программировать виртуального робота VirtualVEX. Однако должны быть предприняты некоторые другие шаги. Required Materials:
Note : вы можете получить все необходимые инструменты в одном пакете, загрузив набор для программирования, доступный на странице загрузок. Он включает в себя редактор кода, связанный с компилятором и source.cs. Шаблон source.cs «Электропроводка» виртуального робота
код скомпилирован, вы можете загрузить его в VirtualVEX, поместив main.dll в папку C:\VVData\UserCode (для стандартной версии) или Использование IDE для компиляции
Среда разработки VVDevelop
Руководство: Создание пользовательского кода с помощью VVDevelop |



 » и имя на «основной»
» и имя на «основной» 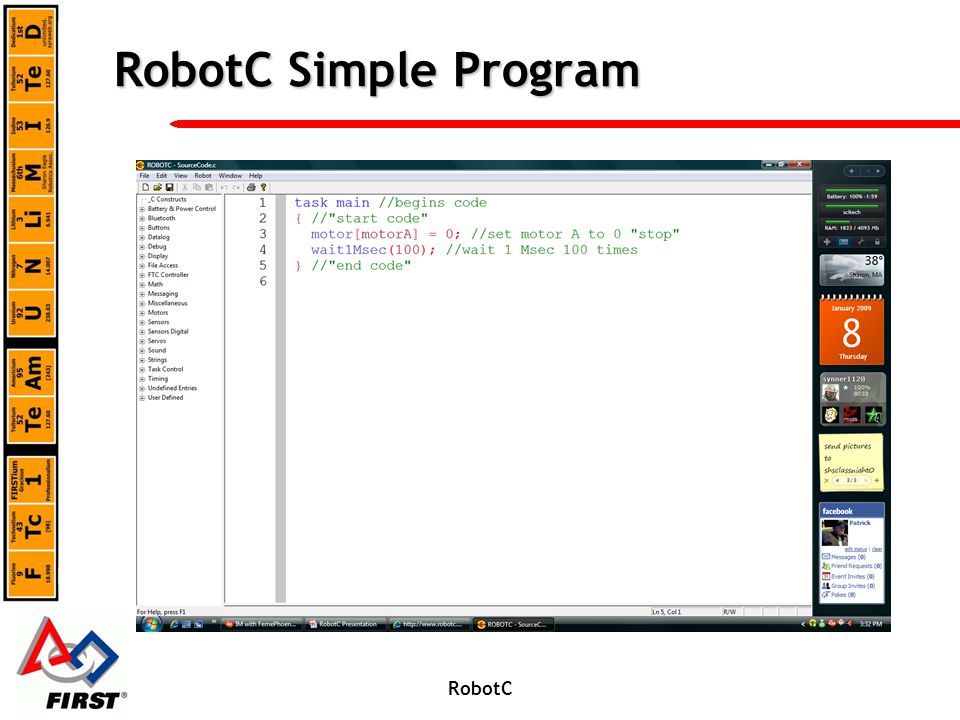 Большинство из них настолько незначительны, что вы никогда с ними не столкнетесь, но в определенных ситуациях вы можете столкнуться с этим конфликтом. Вот различия, относящиеся к программированию для VirtualVEX:
Большинство из них настолько незначительны, что вы никогда с ними не столкнетесь, но в определенных ситуациях вы можете столкнуться с этим конфликтом. Вот различия, относящиеся к программированию для VirtualVEX: ROBOTC.net :: Дом лучшего языка программирования роботов для образовательной робототехники. Сделано для программирования NXT и программирования VEX.
ROBOTC — это язык программирования роботов для программирования NXT и VEX.
-
robotc.net Скорость страницы -
Robotc.net Ресурсы, используемые на стр. Уникальные хосты, на которые ссылается страница 16 Ресурсы HTTP, загруженные на страницу 67 9010 . 55 Ресурсы CSS, на которые ссылается страница 6 Ресурсы JavaScript, на которые ссылается страница 18 РОБИЛЬНЫЙ РЕСУСКИЙ РЕСУРСКИЙ РЕСУРС.  0109
0109 967,663 JS Resources на стр. 2,478,368 Другие ресурсы на странице 43,318 . Домены Аналогичные robotc.net www.obotc.net
www.robotc.net
www.eobotc.net
www.reobotc.net
www.erobotc.net
www.dobotc.net0220 www.rdobotc.net
www.drobotc.net
www.fobotc.net
www.rfobotc.net
www.frobotc.net
www.tobotc.net
www.rtobotc.net
www.trobotc.net
www .rbotc.net
www.ribotc.net
www.roibotc.net
www.riobotc.net
www.rkbotc.net
www.rokbotc.net
www.rkobotc.net
www.rlbotc.net
www.rolbotc .net
www.rlobotc.net
www.rpbotc.net
www.ropbotc.net
www.rpobotc.net
www.rootc.net
www.rovotc.net
www.robvotc.net
www.rovbotc.net
www.rogotc.net
www.robgotc.net
www.rogbotc.net
www.rohotc. net
net
www.robhotc.net
www.rohbotc.net
www.ronotc.net
www .robnotc.net
www.ronbotc.net
www.robtc.net
www.robitc.net
www.roboitc.net
www.robiotc.net
www.robktc.net
www.roboktc.net
www.robkotc .net
www.robltc.net
www.roboltc.net
www.roblotc.net
www.robptc.net
www.robptc.net
www.robpotc.net
www.roboc.net
www.roborc.net
www.robotrc.net
www.robortc.net
www.robofc.net
www.robotfc.net
www.roboftc.net
www.robogc.net
www.robotgc.net
www .robogtc.net
www.roboyc.net
www.robotyc.net
www.roboytc.net
www.robot.net
www.robotx.net
www.robotcx.net
www.robotxc.net
www.robotd .net
www.robotcd.net
www.robotdc.net
www.robotf.net
www.robotcf.net
www.robotv.net
www.robotcv.net
www.robotvc.net
www.robotcnet
www.robotc.et
www.robotc.bet
www. robotc.nbet
robotc.nbet
www.robotc.bnet
www.robotc.het
www.robotc.nhet
www.robotc.hnet
www.robotc .jet
www.robotc.njet
www.robotc.jnet
www.robotc.met
www.robotc.nmet
www.robotc.mnet
www.robotc.nt
www.robotc.nwt
www.robotc.newt
www.robotc.nwet
www.robotc.nst
www.robotc.nest
www.robotc.nset
www.robotc.ndt
www.robotc.nedt
www.robotc.ndet
www.robotc.nrt
www.robotc.nert
www.robotc.nret
www.robotc.ne
www.robotc.ner
www.robotc.netr
www.robotc.nef
www.robotc.netf
www .robotc.neft
www.robotc.neg
www.robotc.netg
www.robotc.negt
www.robotc.ney
www.robotc.nety
www.robotc.neyt
Alexa Rank рассчитывается на основе комбинации среднего количества ежедневных посетителей этого сайта и просмотров страниц на этом сайте. Сайт с самой высокой комбинацией посетителей и просмотров страниц занимает первое место.
Похожие записи
 .
.