Как собрать робота в домашних условиях. Какие детали и компоненты потребуются для создания самодельного робота. Пошаговая инструкция по сборке простого робота своими руками. Какие бывают виды самодельных роботов. На что обратить внимание при конструировании робота-самоделки.
Что такое самодельный робот и зачем его создавать
Самодельный робот — это устройство, собранное своими руками из подручных материалов и электронных компонентов. Создание такого робота позволяет:
- Получить практические навыки в робототехнике и электронике
- Развить инженерное мышление и творческие способности
- Сэкономить на покупке готового робота
- Создать уникальное устройство под свои задачи
- Увлекательно провести время за интересным хобби
Самодельные роботы могут выполнять различные функции — от простого перемещения до сложных манипуляций. Все зависит от фантазии и навыков создателя.
Какие бывают виды самодельных роботов
Существует множество разновидностей самодельных роботов:

- Колесные роботы — самые простые в изготовлении
- Шагающие роботы — имитируют движения животных или человека
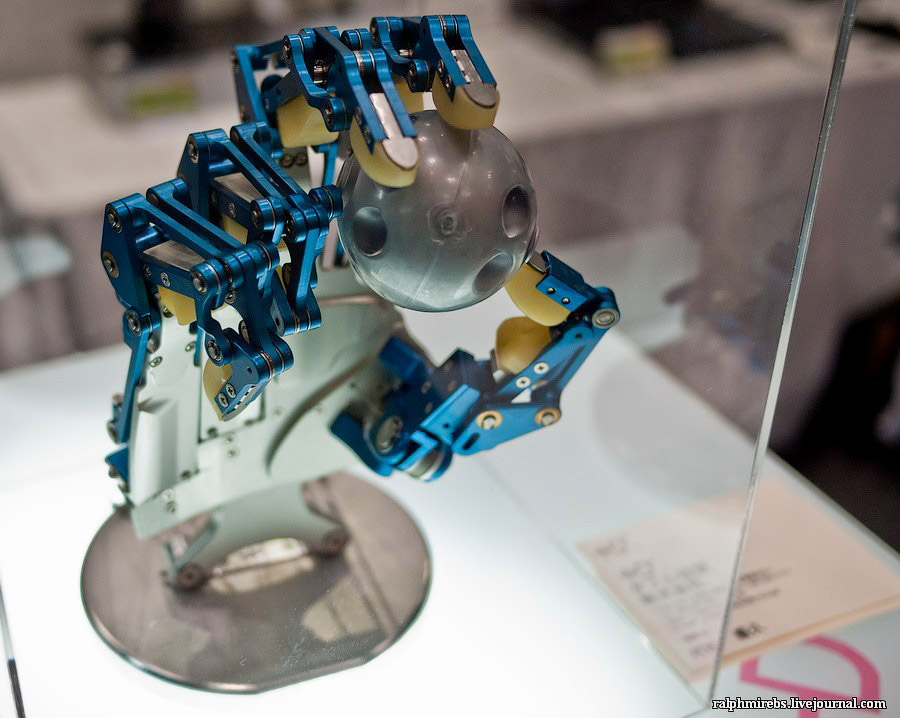
- Манипуляторы — роботизированные руки для захвата предметов
- Летающие роботы — квадрокоптеры, дроны
- Подводные роботы — для исследования водной среды
- Роботы-игрушки — для развлечения и обучения
- Роботы-помощники — для бытовых задач
Выбор типа робота зависит от целей создания и имеющихся ресурсов. Начинающим лучше начать с простых колесных конструкций.
Необходимые компоненты для сборки простого робота
Для создания базовой модели самодельного робота потребуются следующие детали:
- Платформа-шасси — основа конструкции
- Колеса или гусеницы — для передвижения
- Двигатели — приводят робота в движение
- Аккумулятор — источник питания
- Микроконтроллер (например, Arduino) — «мозг» робота
- Датчики — для получения информации об окружении
- Провода, разъемы — для соединения компонентов
- Крепежные элементы — для сборки конструкции
Дополнительно могут понадобиться различные модули расширения, сервоприводы, светодиоды и другие компоненты в зависимости от функционала робота.

Пошаговая инструкция по сборке простого робота
Рассмотрим основные этапы создания базовой модели колесного робота:
- Подготовка платформы-шасси — вырезаем основу из пластика или фанеры
- Установка колес — крепим колеса к платформе через оси
- Монтаж двигателей — прикрепляем моторы к платформе
- Подключение контроллера — устанавливаем Arduino и подключаем к нему компоненты
- Подсоединение датчиков — монтируем и подключаем нужные сенсоры
- Установка аккумулятора — размещаем батарею и подключаем питание
- Программирование — загружаем скетч управления в Arduino
- Тестирование — проверяем работу всех узлов робота
Это базовая схема сборки. Конкретные шаги могут отличаться в зависимости от конструкции робота.
На что обратить внимание при конструировании робота
При создании самодельного робота важно учитывать следующие моменты:
- Прочность конструкции — все элементы должны быть надежно закреплены
- Баланс — правильное распределение веса для устойчивости
- Энергоэффективность — оптимальное потребление энергии
- Простота обслуживания — возможность легкой замены компонентов
- Безопасность — отсутствие острых краев, изоляция проводки
- Функциональность — робот должен выполнять поставленные задачи
Также важно заранее продумать алгоритм работы робота и подобрать компоненты с учетом планируемых функций.
Программирование самодельного робота
Для управления роботом необходимо запрограммировать микроконтроллер. Процесс включает:- Выбор среды разработки (например, Arduino IDE)
- Написание программного кода на C++ или другом языке
- Компиляция и загрузка скетча в микроконтроллер
- Отладка и тестирование программы
Начинающим лучше использовать готовые библиотеки и примеры кода, постепенно усложняя программу. Важно учитывать особенности работы всех компонентов робота.
Возможные проблемы при создании робота и их решение
При конструировании самодельного робота могут возникнуть следующие сложности:
- Нестабильное движение — проверьте балансировку и крепление колес
- Быстрый разряд батареи — оптимизируйте энергопотребление
- Ошибки в работе датчиков — проверьте подключение и калибровку
- Сбои в программе — отладьте код, проверьте совместимость компонентов
- Перегрев двигателей — установите систему охлаждения
Большинство проблем решается путем тщательной проверки всех узлов и постепенной отладки конструкции. Не бойтесь экспериментировать и вносить изменения в проект.

Истории самодельного робота. Ч.1 / Хабр
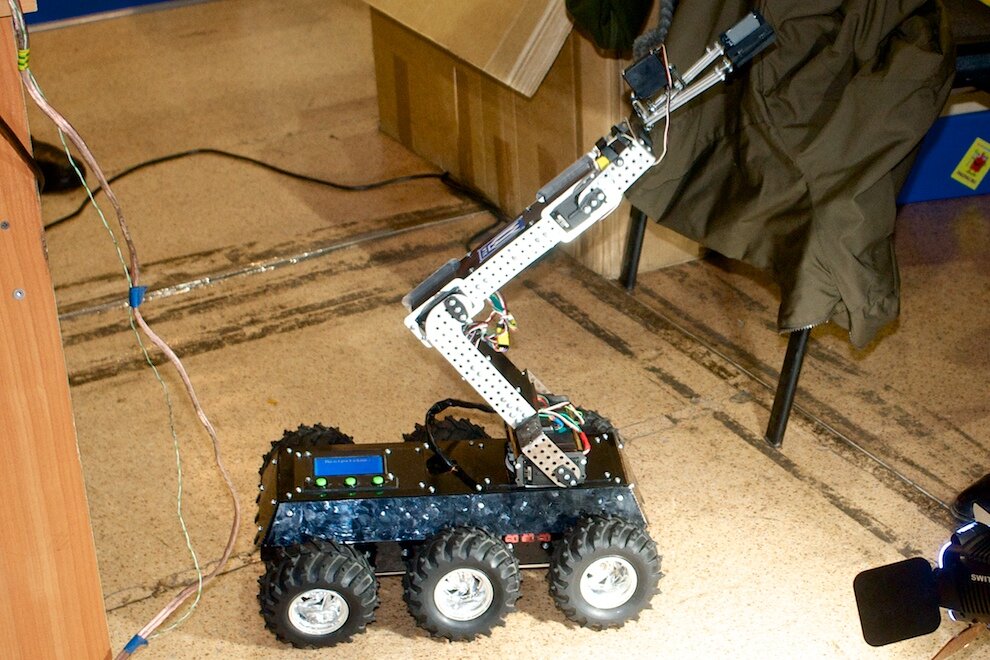
Всегда был интересен процесс интеграции тех или иных роботов в социальную, городскую сферу.Возникает очень много вопросов, как технического, юридического так и этического характера.
Что будет например если ваша поделка весом под 60 кг сломает, например, кому то ногу.Или собьется GPS-трек и робот спровоцирует ДТП на оживленном пешеходном переходе-перекрестке? Или подарит цветы не той, «незапрограммированной» девушке, ошибется цветом кожи клиента или доставит до адресата пиво теплым а шаурму холодной? Задавшись в один прекрасный момент идеей создания робота своей мечты можно получить ответы на некоторые эти вопросы, заодно, в очередной раз, попробовать перевернуть мир.Собственно под катом описан процесс создания некого универсального робота.Конкретно шасси.
Первые роботы были скорее «пробой пера»
Был такой, 2-х колесный
И такая модификация:
Ну и такая:
После изучения с полсотни вариантов конструкций, как заводских так и самодельных решено было взять за основу простую и изящную конструкцию типа «Краб» от тайландских мастеров газонокошения. Были визуально определены конструкция, механика и кинематика.
Были визуально определены конструкция, механика и кинематика.
Итак, для создания нам понадобится:
- Кучка металлолома:
Колеса.Желательно выбрать с ярко выраженным протектором, параллельным оси колеса, чтобы реализовать грунто-зацеп и танковый разворот.В данном случае используются колеса от мотоблока.
Ведомые звезды.От мотоциклов, мокиков и прочей велосипедятины.
Электродвигатели с редуктором модели MY1016Z2 на 12 вольт.Как выяснилось позже запас магнитного насыщения сердечника и толщина изоляции обмоток такого двигателя позволяют запросто их перегружать напряжением в 24 вольта, повышая ток и мощность.
Мотоциклетная цепь. Была выбрана мотоциклетная цепь под номером 428, для пущей совместимости с большинством зубчатых колес.
Пульт дистанцинного управления.Использовать можно любой, был взят китайский для авиамоделизма, с радиусом действия до 400м.
Микроконтоллер Atmega 8a.
Парочка сборок Дарлингтона для управления электромагнитными реле.К примеру ULN2803AFWG.
Электромагнитные реле и постели для них, применяющиеся преимущественно на автомобилях.

- Свинцовая аккумуляторная батарея.
Спустя пару месяцев махания диском болгарки, росчерка электродами и конструкция из пота, крови и металла была готова.
Ступицы, оси, шайбы и прочие запчасти.Не обошлось без токарных работ по вытачиванию упоров, натяжных роликов для цепей.
Кусок металла и куча проводов:
Электронная начинка для теста всей конструкции предельная проста:
Atmega напрямую прикрученная к транзисторной сборке, которая напрямую управляет реле.Реле, надо отметить, коммутируют нагрузку через самодельные дросселя, чтобы немного сгладить якорные токи при пуске двигателей.
Переполюсовка питания двигателей также осуществляется по команде с Atmeg`и через отдельные реле.
Проведя процедуру привязки приемника к пульту, замкнув сервисной перемычкой контакты на приемнике, на сленге «Bind» — можно приступить к программированию управления пультом.
Посмотрим на выходные сигналы с приемника осциллографом:
Ага, в взависимости от положения стика меняется длительность импульса.Можно обработать это микроконтроллером, считывая уровни сигналов, считая такты-длительность.
Пару-десятков тестов для калибровки и код был написан.
Так выглядит исходник по приему сигналов с приемника и управлением роботом.
;by IC ;GK1 ;PC5-муфта ;pc4-контакт 4- реверс правый борт (ВЫХОДНОЙ СИГНАЛ) ;pc3-контакт 3 -реверс левый борт (ВЫХОДНОЙ СИГНАЛ) ;pc2-контакт 2 -мотор-редуктор правый борт (ВЫХОДНОЙ СИГНАЛ) ;pc1-контакт 1 -мотор-редуктор левый борт (ВЫХОДНОЙ СИГНАЛ) ;pc0-ДВС (ВЫХОДНОЙ СИГНАЛ)G ;pb-ВХОДНОЙ СИГНАЛ ПДУ ;ПДУ - канал 4 - левый стик, лево-право ;ПДУ - канал 3 - левый стик, вверх-вниз ;ПДУ - канал 2 - правый стик, вверх-вниз (вниз-скважность уменьшается, вверх- скважность увеличивается) ;ПДУ - канал 1 - правый стик, лево- право (лево-скважность уменьшается, право- скважность увеличивается) ;d7-d8 -нейтраль ;0116h - высоко ;91 - низко rjmp RESET ; Reset Handler rjmp EXT_INT0 ; IRQ0 Handler rjmp EXT_INT1 ; IRQ1 Handler ;rjmp TIM2_COMP ; Timer2 Compare Handler ;rjmp TIM2_OVF ; Timer2 Overflow Handler ;rjmp TIM1_CAPT ; Timer1 Capture Handler ;rjmp TIM1_COMPA ; Timer1 CompareA Handler ;rjmp TIM1_COMPB ; Timer1 CompareB Handler ;rjmp TIM1_OVF ; Timer1 Overflow Handler ;rjmp TIM0_OVF ; Timer0 Overflow Handler ;rjmp SPI_STC ; SPI Transfer Complete Handler ;rjmp USART_RXC ; USART RX Complete Handler ;rjmp USART_UDRE ; UDR Empty Handler ;rjmp USART_TXC ; USART TX Complete Handler ;rjmp ADC ; ADC Conversion Complete Handler ;rjmp EE_RDY ; EEPROM Ready Handler ;rjmp ANA_COMP ; Analog Comparator Handler ;rjmp TWSI ; Two-wire Serial Interface Handler ;rjmp SPM_RDY ; Store Program Memory Ready Handler RESET: cli ldi r17, 0xff out 0x3D, r17 ;инициализация стэка ldi R16, 0b00111111 ;порт С как выход out 0x14, r16 ;настройка через регистр DDRC\ ldi R16, 0x0 ;порт B как вход out 0x17, r16 ;настройка через регистр DDRB ldi R16, 0x0 ;порт D как вход out 0x11, r16 ;настройка через регистр DDRD sbi 0x12, 0 ;устанавливаем бит активации Pull-up в PORTD для пина PD0 sbi 0x12, 1 ;устанавливаем бит активации Pull-up в PORTD для пина PD1 sbi 0x12, 2 ;устанавливаем бит активации Pull-up в PORTD для пина PD2 jmp PDU_mode U_turn_right_PDU: nop CALL R1__LEFT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON nop jmp chanel3 U_turn_left_PDU: nop CALL R2__RIGHT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON nop jmp chanel3 PDU_mode: chanel1: ldi r21, 0 ldi r22, 0 ldi r23, 1 ldi r24, 0 nop get_low: nop sbic 0x10, 0 jmp get_low ;дождались нуля на PD0 get_rising: nop sbis 0x10, 0 jmp get_rising ;дождались HIGH сигнала на PD0 get_falling: nop add r21, r23 ;основной бит adc r22, r24 ;дополнительный sbic 0x10, 0 jmp get_falling ;Сигнал HIGH закончился cpi r22, 1 breq U_turn_right_PDU cpi r21, 0x9f ;a0 brlo U_turn_left_PDU chanel2: ldi r21, 0 ldi r22, 0 ldi r23, 1 ldi r24, 0 nop get_low2: nop sbic 0x10, 1 jmp get_low2 ;дождались нуля на PD0 get_rising2: nop sbis 0x10, 1 jmp get_rising2 ;дождались HIGH сигнала на PD0 get_falling2: nop add r21, r23 ;основной бит adc r22, r24 ;дополнительный sbic 0x10, 1 jmp get_falling2 ;Сигнал HIGH закончился cpi r22, 1 breq Motion_forward_PDU cpi r21, 0x9f ;a0 brlo Motion_backward_PDU nop CALL M1__LEFT_OFF CALL M2__RIGHT_OFF CALL latency_relay_switch CALL R1__LEFT_OFF CALL R2__RIGHT_OFF nop chanel3: ldi r21, 0 ldi r22, 0 ldi r23, 1 ldi r24, 0 get_low3: sbic 0x10, 2 jmp get_low3 ;дождались нуля на PD0 get_rising3: sbis 0x10, 2 jmp get_rising3 ;дождались HIGH сигнала на PD0 get_falling3: add r21, r23 ;основной бит adc r22, r24 ;дополнительный sbic 0x10, 2 jmp get_falling3 ;Сигнал HIGH закончился cpi r22, 1 breq Clutch_ON_PDU CALL Clutch_OFF nop jmp PDU_mode Clutch_ON_PDU: CALL Clutch_ON jmp PDU_mode Motion_forward_PDU: CALL R2__RIGHT_ON CALL latency_relay_switch CALL R1__LEFT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON nop jmp chanel3 Motion_backward_PDU: CALL M1__LEFT_ON CALL M2__RIGHT_ON nop jmp chanel3 LDI R16,2 ; Загружаем адрес нулевой ячейки LDI R17,0 ; EEPROM ;LDI R21, 0x33 ; и хотим записать в нее число cc RCALL EEWrite ; вызываем процедуру записи.
LDI R16,1 ; Загружаем адрес нулевой ячейки LDI R17,0 ; EEPROM mov r21, r22 RCALL EEWrite ; вызываем процедуру записи. ldi r25, 1 ;флаг записи епромки LDI R16,3 ; Загружаем адрес нулевой ячейки LDI R17,0 ; EEPROM mov r21, r25 RCALL EEWrite ; вызываем процедуру записи. skip: nop jmp idle EEWrite: SBIC EECR,EEWE ; Ждем готовности памяти к записи. Крутимся в цикле RJMP EEWrite ; до тех пор пока не очистится флаг EEWE CLI ; Затем запрещаем прерывания. OUT EEARL,R16 ; Загружаем адрес нужной ячейки OUT EEARH,R17 ; старший и младший байт адреса OUT EEDR,R21 ; и сами данные, которые нам нужно загрузить SBI EECR,EEMWE ; взводим предохранитель SBI EECR,EEWE ; записываем байт SEI ; разрешаем прерывания RET ; возврат из процедуры EERead: SBIC EECR,EEWE ; Ждем пока будет завершена прошлая запись. RJMP EERead ; также крутимся в цикле. OUT EEARL, R16 ; загружаем адрес нужной ячейки OUT EEARH, R17 ; его старшие и младшие байты SBI EECR,EERE ; Выставляем бит чтения IN R25, EEDR ; Забираем из регистра данных результат RET Motion_forward: CALL latency_relay_switch CALL R2__RIGHT_ON CALL latency_relay_switch CALL R1__LEFT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON CALL latency CALL M1__LEFT_OFF CALL M2__RIGHT_OFF CALL latency_relay_switch CALL R1__LEFT_OFF CALL R2__RIGHT_OFF Motion_backward: CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON CALL latency CALL M1__LEFT_OFF CALL M2__RIGHT_OFF U_turn_right: CALL latency_relay_switch CALL R1__LEFT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON CALL latency CALL M1__LEFT_OFF CALL M2__RIGHT_OFF CALL latency_relay_switch CALL R1__LEFT_OFF ;ret U_turn_left: CALL latency_relay_switch CALL R2__RIGHT_ON CALL latency_relay_switch CALL M1__LEFT_ON CALL M2__RIGHT_ON CALL latency CALL M1__LEFT_OFF CALL M2__RIGHT_OFF CALL latency_relay_switch CALL R2__RIGHT_OFF ;ret jmp Motion_forward TEST1: CALL ICE_Start CALL latency CALL ICE_Stop CALL latency CALL M1__LEFT_ON CALL latency CALL M1__LEFT_OFF CALL latency CALL M2__RIGHT_ON CALL latency CALL M2__RIGHT_OFF CALL latency CALL R1__LEFT_ON CALL latency CALL R1__LEFT_OFF CALL latency CALL R2__RIGHT_ON CALL latency CALL R2__RIGHT_OFF CALL latency CALL Clutch_ON CALL latency CALL Clutch_OFF jmp TEST1 idle: ;sbi 0x15, 5 ;PortC, бит 5 nop jmp idle EXT_INT0: sbi 0x15, 5 ;PortC, бит 5 reti EXT_INT1: sbi 0x15, 4 ;PortC, бит 5 reti ;Задержка latency_relay_switch: ;калиброванная задержка для переключения реле ldi r20, 255 ldi r21, 100 ;ldi r22, 1 delay2: subi r20, 1 sbci r21, 0 ;sbci r22, 0 brne delay2 nop ret ;Задержка latency: ldi r20, 255 ldi r21, 255 ldi r22, 12 delay1: subi r20, 1 sbci r21, 0 sbci r22, 0 brne delay1 nop ret ICE_Start: sbi 0x15, 0 ;PortC, бит 0 RET ICE_Stop: cbi 0x15, 0 ;PortC, бит 0 ret M1__LEFT_ON: sbi 0x15, 1 ;PortC, бит 1 ret M1__LEFT_OFF: cbi 0x15, 1 ;PortC, бит 1 ret M2__RIGHT_ON: sbi 0x15, 2 ;PortC, бит 2 ret M2__RIGHT_OFF: cbi 0x15, 2 ;PortC, бит 2 ret R1__LEFT_ON: sbi 0x15, 3 ;PortC, бит 3 ret R1__LEFT_OFF: cbi 0x15, 3 ;PortC, бит 3 ret R2__RIGHT_ON: sbi 0x15, 4 ;PortC, бит 4 ret R2__RIGHT_OFF: cbi 0x15, 4 ;PortC, бит 4 ret Clutch_ON: sbi 0x15, 5 ;PortC, бит 5 ret Clutch_OFF: cbi 0x15, 5 ;PortC, бит 5 ret
После окончательной сборки и с полсотни выездов стало ясно что механика робота работает отлично. Данная телега легко справляется с большинством препятствий, значительными уклонами до 40 ‰, обладает запасом мощности, достаточной маневренностью.
Данная телега легко справляется с большинством препятствий, значительными уклонами до 40 ‰, обладает запасом мощности, достаточной маневренностью.
Как видно на видео на некоторых участках местности крутящего момента двигателей явно не хватает.
Не беда — они легко выдерживают 2-х кратную перегрузку с повышением момента и оборотов.Достаточно установить в силовой цепи последовательно еще 1 аккумулятор, но при этом появляется другая большая проблема — залипание контактной части реле, вследствии возрастания тока.Что собственно и произошло — вдруг 60000 грамовая машина потеряв управление понеслась в недопустимую сторону.
Решение проблемы установкой контакторов с дугогашением не рассматривается в принципе — жизнь людей дороже, пусть лучше сгорит транзистор в контроллере электродвигателя.
Вернувшись на «базу» без потерь решено было серьезно доработать схемотехнику и алгоритмы управления роботом, в пользу человечества.Иначе как он сможет автономно развозить шаурму? не привлекая внимания работников правоохранительных органов и не попадать в криминальную сводку местных новостей.
Как можно заметить робот представленный в заголовке статьи и робот описанный в теле статьи несколько отличаются.Это значит лишь то, что не все истории рассказаны.
На робота будут установлены более-менее профессиональные контроллеры электродвигателей с векторным управлением крутящего момента, различными программными функциями типа hard-stop, выполнено дублирование сигналов, установлена датчиковая аппаратура и литиевые аккумуляторы, будет заменен, на более интересный, микропроцессор.
Запись теплового следа и поиск отклонений для фиксаций нарушений охранного периметра и локальных техногенных дефектов.
Подключение робота к купюроприемнику по старому протоколу mdb vending.
Обо всем этом и приключениях робота среди людей в следующих частях.
P.S. Новые законы робототехники не за горами.
P.S.S. Рабочее название проекта «Grass-killer».
Как сделать робота своими руками / Схемы, чертежи, видео, инструкции по сборке роботов дома
В данном разделе сайта вы найдете подробные инструкции по сборке роботов своими руками в мастерской или даже у себя дома. Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
search
ВездеМагазинНовостиОбзорыОрганизацииСделай самСтатьиФорум
DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкция
В этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту. Достаточно легкий в изготовлении робот, не требующий никаких дорогостоящих комплектующих. Попробуйте сделать такого робота самостоятельно. Смотрите подробности…
Смотрите подробности…
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданию
Возможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под управлением arduino и смартфона…
DIY: Реалистичная робот-рыба из пвх трубы под Arduino. Пошаговая инструкция по созданию
В этой инструкции показано подробно, как сделать своими руками робота-рыбу из обычной водопроводной трубы, который сможет плавать в воде и даже использоваться в промышленных целях. Для его создания понадобиться не так уже много материалов и времени…
DIY: Робот с голосовым управлением и зрением на базе MakeBlock и Android. Пошаговая инструкция по созданию
В данной инструкции мы расскажем, как оснастить простого гусеничного робота из конструктора MakeBlock компьютерным зрением и управлением от голосовых команд.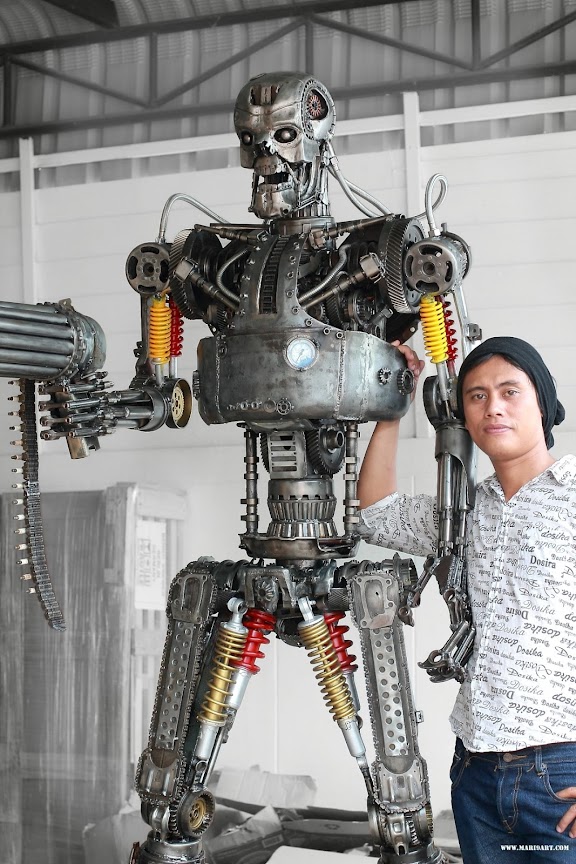 Вам может показаться это сложной задачей, но на самом деле все очень просто…
Вам может показаться это сложной задачей, но на самом деле все очень просто…
DIY: Подталкиватель мышки на LEGO Mindstorms. Пошаговая инструкция по изготовлению
В данной инструкции мы хотим поделиться с вами навыками построения робота на основе комплекта Mindstorm, который двигает вашу компьютерную мышь. Вам наверняка интересно узнать, зачем нужно использовать такую дорогую вещь для такой простой задачи? Цель этого робота – уберечь ваш компьютер в спящем режиме без изменения настроек. Да, кажется, это совершенно бесполезный предмет, но это весело, убедитесь сами…
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Популярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств. ..
..
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданию
Это руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобства представляем вам 9 шагов для более детального подхода к сборке. Что из этого получиться увидим, когда соберем эту игрушку у себя дома…
DIY: Роботизированная рука на базе LEGO Mindstorm NXT. Пошаговая инструкция по созданию
В данной инструкции мы расскажем вам, как можно построить самостоятельно
роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в
этой инструкции автор хотел сделать штатив для своей камеры. Но это
оказалось трудным заданием. После нескольких экспериментов автору
удалось сделать простую роботизированную руку. ..
..
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданию
Если вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданию
Sneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности. Sneel является биомиметическим, мобильным, водным роботом с открытым исходным кодом. Электромеханическая конструкция Sneel имитирует структуру и движения реальной водяной змеи, чтобы исследовать поведение линейных роботов во время плавания. Представляем вам подробнейшую пошаговую инструкцию по его изготовлению…
Электромеханическая конструкция Sneel имитирует структуру и движения реальной водяной змеи, чтобы исследовать поведение линейных роботов во время плавания. Представляем вам подробнейшую пошаговую инструкцию по его изготовлению…
DIY: Arduino управляемый робот для игры в пинг-понг. Пошаговая инструкция по созданию
Эта пусковая установка для пинг-понга управляется от Arduino. Конструкция использует сервопривод для распределения шариков и два двигателя с колесами для скорости и ловкости толчков…
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданию
Представляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться. Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
Самодельный робот — настольный теннис — RTTF.ru
Турниры LIVE
Ближайшие турниры
все городаМоскваМытищиСегодня вт 04.10.2022
19:30 225 Люблино 13
19:30 300 Лосинка 53
19:30 150 Лосинка 61
19:30 360 ФилиТТ 8
19:30 535 ФилиТТ 22
19:30 690 TENIX 191
19:30 475 TN Club 19
20:00 277 HurricaneTT 20
20:00 750 Крылья 162
21:00 444 TTL-Савёл 11
ср 05.10.2022
11:00 180 Point 10
11:00 315 TTL-Савёл 173
11:00 275 TENIX 0
11:00 отк ФилиТТ 3
11:30 424 ФилиТТ 1
12:30 577 HurricaneTT 0
12:30 260 NATEN-1905 2
15:00 230 Point 5
15:00 600 TTL-Савёл 161
15:00 277 HurricaneTT 0
15:00 150 TENIX 0
15:30 450 ФилиТТ 1
16:45 отк Лосинка 111
19:30 350 Люблино 11
19:30 140 Point 12
19:30 888 ФилиТТ 8
19:30 250 ФилиТТ 16
19:30 450 TENIX 17
20:00 575 Крылья 96
20:00 1107 HurricaneTT 2
21:00 200+ TTL-Савёл 61
чт 06.
 10.2022
10.202211:00 430 Point 1
11:00 400 TTL-Савёл 61
11:00 690 TENIX 3
11:30 444 ФилиТТ 1
11:30 175 TENIX 2
12:30 260 NATEN-1905 2
12:30 577 HurricaneTT 0
15:00 100 Point 3
15:00 500 TTL-Савёл 22
15:00 277 HurricaneTT 1
15:00 430 TENIX 0
15:30 333 ФилиТТ 0
19:30 200 Люблино 6
19:30 330 Point 10
19:30 300 Лосинка 3
19:30 585 ФилиТТ 1
19:30 175 ФилиТТ 3
19:30 575 TENIX 2
19:30 275 TN Club 0
20:00 430 Крылья 31
20:00 327 HurricaneTT 3
21:00 444 TTL-Савёл 5
пт 07.
 10.2022
10.202211:00 140 Point 1
11:00 259 TTL-Савёл 11
12:30 395 NATEN-1905 3
12:30 577 HurricaneTT 0
15:00 300 Point 1
15:00 175 TTL-Савёл 31
15:00 357 HurricaneTT 0
16:45 отк Лосинка 0
Групповые тренировки
Сегодня вт 04.10.2022
20:00 отк VoikaTT 5
21:00 отк ЛуЦентр 5
21:00 отк NATEN-1905 7
ср 05.10.2022
09:00 отк NATEN-1905 7
10:30 отк Люблино 1
11:00 отк HurricaneTT 1
19:00 отк Люблино 0
21:00 отк NATEN-1905 5
чт 06.10.2022
09:00 отк ЛуЦентр 6
09:00 отк NATEN-1905 4
18:30 отк ЛуЦентр 10
20:00 отк VoikaTT 0
21:00 отк ЛуЦентр 6
21:00 отк NATEN-1905 6
пт 07.
 10.2022
10.202209:00 отк ЛуЦентр 0
09:00 отк NATEN-1905 5
10:30 отк Люблино 1
18:00 отк ЛуЦентр 3
19:00 отк Люблино 1
20:30 отк ЛуЦентр 2
21:00 отк NATEN-1905 7
вс 09.10.2022
13:30 отк Люблино 0
20:00 отк NATEN-1905 4
пн 10.10.2022
10:30 отк Люблино 1
вт 11.10.2022
09:00 отк ЛуЦентр 2
18:30 отк ЛуЦентр 5
Обновления видео
0МТ смешанные пары. Исмаилов/Абраамян — Ливенцов/Прохорова
0Алексей Ливенцов и Юлия Прохорова. Тренировка парной игры от чемпионов России
0Кабрера Даниэль 660 — Чичаев Николай 598. Орехово-Зуево. Междугородний Турнир по настольному теннису
Орехово-Зуево. Междугородний Турнир по настольному теннису
0Заркина Дарья 444 рттф — Пахомова Анастасия 273 рттф. Орехово-Зуево. Сентябрь 2022 год
5Непробиваемая стенка от Попова в Лиге-про
0Почему нельзя купить накладку, как у контрактного игрока, в магазине
0Как прокатить мяч по столу
0Фёдоров Арсений 693 — Кабрера Даниэль 660.Орехово-Зуево. Междугородний Турнир по настольному теннису
0Aidos Kenzhigulov (KZA) vs Emmanuel Lebesson (FRA) | MT Grps
0Denis Zholudev (KZA) vs Alexis Lebrun (FRA) | MT Grps
Михайлова Полина
Обновления фото
0***
0Фото без названия
0Фото без названия
0Кубок России 22 Охотникова
0Кубок России 22 Зиронова
0Кубок России 22 Прохорова
0Кубок России 22 Щербатых
0Кубок России 22 Макаров
0Кубок России 22 Исавов
0Кубок России 22 Гаврилов
клуб Чертаново / Коцюр Валерия
Ширшов Василий589
от 800 р.
ВПТ Авиа
Семешин Павел733
от 800 р.
HurricaneTT
Анисимов Антон1088
от 2000 р.
ФилиТТAnisimov.RTTF.ru
Сейчас на сайте
игроков: 157Дмитри Boris P vitap alexp55 seompson Gav232 laexssi MikeS mr_sover sapfir58-58 gagnant Ренат vihr filiTT Benjamin-tt box_of_nails Миротворец Konigor J-Point egor6690 Сергей Арбитражный AlexFed Tony153 sgolovan ArtTT contentRTTF SASHA K Denisoff79 kirja24able fedx Vitvit AAndreev ЛуЦентр developerit МиХаил poly-x EvgenyK zamkivsem matratc Kepkina 0007 knyaz plot0201 sherenkov murtts fextok Alexbi NIko_gda владимир1956 Strike86 Ruslan78 fbtv TENIX Евгений Б. rchshld Allpachino sbasygin Mr.Ukol Admiral Марат SERGONY veled.po Bask Артем_2004 tennesseest Lublino bronnik56 kutuzov mr.dmitry.nechaev Mass artem.popov Allex Nik.g ru perovicktt Lena zeos13 korlagon Impresario machette Piton Smar Hurricane-TT Drom fedor darkysyanok bolgovea maxim83 jesmart ill MargaritaCh subik68 MichaelM Freemka lionKing sesrgceg Slider Максим57 SPAmen 19teva77 OlegS shep78 Ilya_Korogodsky vaatu99 corbel Rustam88 intro04 Сергей Маркелов akorotitskiy olmi TEMONTII KlodIK beloit TTL-Savel Bender BigDenisV Крылья chemech Svechnikov uche123 CaH_CaHbI4 Pirogus Gregoire Levaronzon21 mightySLav Miha07 vladn56 Astamega Алекс. polbotinka Rico7 Poprick Юргин AmaLi Block belenyuk dmitriiK Вольный Mefistofel 0207 Fedor100 GalinaD Boykon uram1961 Mikhail1 EYurkov Jambalova Pasha777 Calt DyPeMaP Nemurov valzon Abdulaziz Gannik 281120 Дмитрий Борисович Моисеев Grigoire vitekjostky
polbotinka Rico7 Poprick Юргин AmaLi Block belenyuk dmitriiK Вольный Mefistofel 0207 Fedor100 GalinaD Boykon uram1961 Mikhail1 EYurkov Jambalova Pasha777 Calt DyPeMaP Nemurov valzon Abdulaziz Gannik 281120 Дмитрий Борисович Моисеев Grigoire vitekjostky
Акции от RTTF.ru
акция
Конкурс прогнозов. Недельный зачет за 03.10.2022 — 09.10.2022
Жизнь на сайте
форум
88
Россия! Россия!
форум
14
Инженер — лучший тренер.
новость
2
Сатиян Гнанасекаран приносит победу Индии над Германией
форум
57
Буква закона
0LIVE! | WT Groups S4 | 2022 World Team Championships Finals Chengdu
0LIVE! | MT Groups S3 | 2022 World Team Championships Finals Chengdu
эфир
0
live Международный турнир. Смешанные пары. 04.10.2022
Смешанные пары. 04.10.2022
новость
0
Стартует последний день группового турнира ЧМ в Чэнду-2022
форум
4
Фильмы о настольном теннисе
форум
138
Беспредельщик Игорь Кикоть
новость
0
Итоги 40-й недели 2022 года на RTTF.ru
форум
155
Стоит ли переходить на шипы?
форум
6
Русский зигзаг.
опрос
29
Какой мяч Вам больше нравится из DHS?
новость
10
Открытие нового зала для настольного тенниса в спортивном центре «Территория Мяча»
Новости клубов
Hurric
3
Групповые тренировки с МСМК Вороновой Анастасией в Hurricane-TT
Крылья
0
Тайский массаж в Крыльях
VoikaT
15
Групповые занятия вечер VoikaTT
ЛуЦент
241
Групповые тренировки в клубе «ЛуЦентр». Тренер-Крегель Дмитрий
Тренер-Крегель Дмитрий
TTL-Са
0
Массажный кабинет в ТТL-Савеловская
VoikaT
1
Утренние группы в клубе VoikaTT
ArtTT-
8
Продажа столов Donic Waldner 30mm
VoikaT
4
Набор в детские группы в VoikaTT.
Обсуждение турниров
турнир
1
04.10 вт 11:00 220 TENIX
турнир
4
04. 10 вт 11:30 490 TENIX
10 вт 11:30 490 TENIX
турнир
2
30.09 пт 19:30 600 Люблино
турнир
4
29.09 чт 19:30 200 Люблино
турнир
2
01.10 сб 18:00 350 Люблино
турнир
1
01.10 сб 11:00 150 Люблино
турнир
3
03.10 пн 20:00 444 Крылья
турнир
1
28.09 ср 18:00 отк СоцЦентр
Купля-продажа б/у
продам
8
DNA Platinum H max. красн. и черн.квадрат
продам
4
Victas Balsa 8.5
продам
0
Butterfly M.Maze
продам
9
Сборные ракеты ⛳🏓🧩🚀🏏
продам
0
Продам почти новое основание Mizutani Super ZLC
продам
0
Робот для тенниса новый в наличие продаю
продам
7
Продам пару малоигранных т05 Макс толщины большого размера
продам
5
красная тенерджи 19 максимальной толщины стандартного размера в неплохом состоянии
Дни рождения
Сегодня 04.
 10.2022 втAndrUsa 214
10.2022 втAndrUsa 214Ульянов АндрейИИгорь1963 330
Янчук Игорьiilya_lysko 218
Лыско ИльяCablemaster 318
Мацкевич Дмитрий00410 178
Дыскин Михаилвсе дни рождения за 4 октября
Завтра 05.10.2022 ср
SSergey…K 532Коготков СергейLESHASM 501
Смирнов Алексейiindi42 198
Булошников Игорьвсе дни рождения за 5 октября
Робот своими руками, или Сотвори себе друга
«Вставьте шплинт А в гнездо Б…»
Почитатели творчества Айзека Азимова, конечно же, узнали текст в кавычках в заголовке. Один из самых коротких рассказов автора трех законов робототехники повествует о горемыках-астронавтах, которым для сборки оборудования на станции прислали специального робота-сборщика в разобранном виде. И с невнятными инструкциями в виде пачки машинописных листов со смазанным текстом. Ирония Азимова вполне понятна. Сборка позитронного робота — процесс намного более сложный, чем, например, сборка шкафа или компьютера.
Ирония Азимова вполне понятна. Сборка позитронного робота — процесс намного более сложный, чем, например, сборка шкафа или компьютера.
Ведь робот — самодостаточный, автономный механизм, который благодаря датчикам и сервоприводам способен ориентироваться и передвигаться в окружающем пространстве, а также принимать кое-какие самостоятельные решения.
Профессионалы в робототехнике, конечно же, создают удивительные экземпляры, но и стоят они соответственно. Например, знаменитого хондовского Asimo купить нельзя — желающие завести себе дома подобного робота могут взять его в аренду за «символические» $14 000 в месяц. Принято считать, что создание роботов сейчас под силу только крупным компаниям с многомиллионными бюджетами и дилетантам в этих вопросах и ловить нечего. Или это общественное мнение тоже устарело?
Сегодня благодаря энтузиастам-роботостроителям, превратившим свое хобби в бизнес, каждый из нас может попробовать свои силы в сотворении собственного Электроника. При этом процесс создания «робота из набора» не ударит сильно ни по карману, ни по затраченному времени и усилиям. Результат же принесет не только массу удовольствия, но и кучу знаний и умений в области электроники.
При этом процесс создания «робота из набора» не ударит сильно ни по карману, ни по затраченному времени и усилиям. Результат же принесет не только массу удовольствия, но и кучу знаний и умений в области электроники.
Разработчики робототехнических платформ сегодня не фанаты-одиночки. У них есть собственные сообщества — такие, к примеру, как KISS Institute for Practical Robotics, некоммерческая организация с благородными целями вовлечения в изучение электроники и робототехники учащихся школ и студентов. Под ее эгидой в рамках образовательной программы Botball Educational Robotics Program проводятся конференции по робототехнике и даже соревнования автономных роботов.
Соревнования, проводимые в рамках образовательной программы Botball, собирают десятки команд юных робототехников.Для любителей конструировать роботов существует свой DIY (Do It Yourself) журнал Make:, а для покупки комплектующих они могут обратиться к любой из множества компаний-производителей.
Имея в распоряжении столько доступной каждому информации и желание собрать собственного робота, остается ответить только на один вопрос: с чего же начать?
Робонаборы Solarbotics
Канадская компания Solarbotics, выросшая, как и большинство подобных стартапов, из увлечения ее создателей роботами, предлагает новичку-робототехнику целую россыпь готовых наборов, из которых можно создать и простенькую игрушку с зачатками роборазума, и сложный автономный механизм, который можно выставлять на соревнования роботов, наподобие Botball.
Наборы Solarbotics просты в освоении, но не думайте, что сборка робота с их помощью — спинномозговой процесс. Работая над собственным творением, вам придется и «паять-починять», и даже освоить азы программирования, чтобы вдохнуть в своего робота программу-жизнь. Впрочем, подробные пошаговые инструкции, прилагающиеся к каждому набору, позволят не оступиться на новой для вас робототехнической тропинке.
SolarSpeeder.
 Быстрее скорости света
Быстрее скорости светаСамым простым набором Solarbotics является SolarSpeeder — миниатюрный автомобиль, работающий от солнечных батарей. Тут бы логично возразить, что никаким роботом тут и не пахнет, но с чего-то же нужно начать. А в SolarSpeeder есть практически все, что затем можно встретить и в более серьезном роботе. Сервоприводы для вращения колес, солнечная батарея для получения энергии и контроллер для управления сервоприводами и батареей.
На крыше SolarSpeeder расположена солнечная батарея, которая делает эту машинку полностью автономной.
Соберите SolarSpeeder — и вы увидите, какой он шустрый. Стоит попасть на его спину солнечным лучам, как он ринется вперед. Три метра за сорок секунд безо всяких батареек.
В наборе SolarSpeeder есть монтажная плата, являющаяся по совместительству и шасси, сервомотор для передачи мощности колесам, солнечная батарея, пара транзисторов, диодов и конденсаторов. Конечно, с непривычки придется попотеть, чтобы собрать воедино «сложную» схему SolarSpeeder. Зато после успешной сборки можно устраивать с друзьями настоящие гонки с этими шустрыми солнечными машинками.
Зато после успешной сборки можно устраивать с друзьями настоящие гонки с этими шустрыми солнечными машинками.
PumLatern. Днем и ночью с фонарем
В совершенстве освоили паяльник и отвертку, собирая SolarSpeeder? Прекрасно. Если вам не чуждо чувство прекрасного, соберите PumLatern — робофонарь.
C виду PumLatern выглядит как обыкновенный ночник. На самом деле — это робот-фонарь.
Роботизированный ночник весь день будет заряжать себя от установленной на его макушке солнечной батареи, а ночью порадует вас диковинной игрой света четырех ярких светодиодов, которые, включаясь хаотически, создадут на стенах вашей комнаты невиданные узоры.
В комплекте PumLatern имеются разнообразные трафареты.
А еще можно выбрать один их многих вариантов декора боковин PumLatern или создать свой собственный вариант. Микросхема-контроллер внутри робота-ночника заведует работой блока зарядки аккумуляторов от солнечной батареи и управлением, включением светодиодов. Собирая PumLatern, придется поработать побольше, чем с машинкой SolarSpeeder, но результат стоит того.
Микросхема-контроллер внутри робота-ночника заведует работой блока зарядки аккумуляторов от солнечной батареи и управлением, включением светодиодов. Собирая PumLatern, придется поработать побольше, чем с машинкой SolarSpeeder, но результат стоит того.
Семейство MouseBot: Herbie и другие робогрызуны
Хотите сказать, что SolarSpeeder и PumLatern — не настоящие роботы? Так, роботизированные вещи. Возможно. Но зато их сборка позволит вам набить руку для действительно серьезного проекта.
Обвинить семейство MouseBot в том, что они — не роботы, сложно. Ведь эти шустрые «мыши» имеют в воем составе датчики, которые позволяют им двигаться за лучом света и не заезжать под препятствия, куда путеводный луч попасть не может.
«Мышиное» семейство MouseBot.
В дружную мышиную робосемью входит красный Herbie, черный Horatio, синий Hamlet и белая Harriet. Инфракрасные датчики на их мордочках способны отличить свет от тьмы и сигнализировать об этом сервомоторам с колесами. А датчик-хвост, почувствовав, что мышь заезжает под препятствие, тут же даст команду на задний ход.
А датчик-хвост, почувствовав, что мышь заезжает под препятствие, тут же даст команду на задний ход.
Sumovore. Робокоп в миниатюре
Конечно, мыши MouseBot умеют многое. Но не столько, сколько робот-боец Sumovore. Судя по названию, этот малыш виртуозно владеет искусством японской борьбы сумо — пусть и сражается он только с себе подобными.
Несмотря на простые правила, сумо требует быстроты, ловкости и изворотливости. Чтобы заполучить эти качества, в составе Sumovore имеются четыре оптических сенсора, позволяющих «видеть» обстановку вокруг, и два высокочастотных инфракрасных датчика, обеспечивающих мгновенную реакцию на приближающееся препятствие. Мощный мотор придает Sumovore не только скорость, но и силу, которая пригодится ему, чтобы вытолкать противника за пределы круга.
Робот Sumovore — один из вариантов обширного семейства SumoBot.
Микропроцессорный мозг робота-сумоиста имеет модульную конструкцию. В основной модуль вшиты базовые правила поведения Sumovore. Их можно расширить с помощью дискретных модулей: Anti Sumo-dance, предотвращающего бесконечный «танец» двух столкнувшихся Sumovore; Anti edge-ram, останавливающего робота в случае победы; и модуля, позволяющего переключить Sumovore из режима борца в режим исследователя.
Собирая Sumovore, придется много паять. «Мозг» робосумоиста представляет собой непростой перепрограммируемый микроконтроллер и несколько сенсоров.
В собранном виде робот Sumovore выглядит весьма грозно.
Впрочем, это далеко не все. Мозг-микроконтроллер Amtel Mega8L Sumovore можно перепрограммировать с помощью массы программных систем, таких, например, как WinAVR, для решения самых разнообразных задач, где требуется находить и толкать предметы и обходить препятствия.
Платформа EZ-Board. Искусство роботостроения
Конечно, как ни крути, а наборы Robot Kits все-таки являются готовыми к употреблению конструкторами. Следуя инструкции, с их помощью можно получить механизм, действие которого запрограммировано разработчиками набора.
Следуя инструкции, с их помощью можно получить механизм, действие которого запрограммировано разработчиками набора.
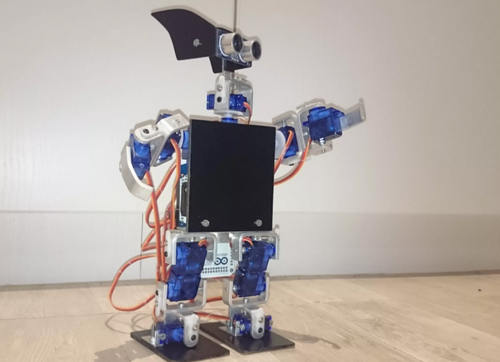
Ну а если хочется отправить творчество и фантазию в свободный полет? Что же, тогда милости просим в компанию EZ-Robot. Ее платформа-микроконтроллер EZ-Board — tabula rasa для роботостроителей.
Платформа EZ-Board — уникальная во всех отношениях робототехническая платформа.
Во-первых, она обладает встроенными USB-портом и приемо-передатчиком Bluetooth, обеспечивающими реализацию дистанционного управления роботом «из коробки». Но главное — платформа EZ-B совместима с массой робототехнической периферии. Имея на борту более двадцати последовательных портов, восемь аналого-цифровых преобразователей и поддержку периферии такой широко известной open source платформы, как Arduino, к EZ-B можно подключать хоть датчики распознавания речи и систему голосового синтеза, хоть камеры распознавания цвета и движения. Туда же стоит записать температурные датчики, сенсоры вибрации, радары, измеряющие расстояние до объекта, интерфейсы для связи с беспроводными устройствами, работающими на частоте 2,4 ГГц, LCD-дисплеи, USB-джойстки, хабы и даже MIDI-интерфейс.
Туда же стоит записать температурные датчики, сенсоры вибрации, радары, измеряющие расстояние до объекта, интерфейсы для связи с беспроводными устройствами, работающими на частоте 2,4 ГГц, LCD-дисплеи, USB-джойстки, хабы и даже MIDI-интерфейс.
И чтобы запрограммировать работу со всем этим богатством, вовсе не требуется быть семи пядей во лбу. Программная среда EZ-Builder позволяет разрабатывать скрипты, управляющие роботом, без единой строчки кода. Точнее говоря, код, конечно же, есть, только вот от «программиста» он скрыт. А доступны ему простые в освоении инструменты подключения и изменения параметров многочисленных датчиков и приводов.
Используя платформу EZ-B, энтузиасты оживили игрушечных WALL-E.
Если же в программировании вы ас, то EZ-Robot предложит вам среду EZ-B SDK, основанную на Microsoft Visual Studio и работающую с компилятором .Net 3,5.
Благодаря своим аппаратным возможностям и разнообразным средам программирования, удовлетворяющим потребности как новичка, так и профессионала, платформа EZ-B широко используется энтузиастами-робототехниками. Посмотрите, какие интересные решения на ее основе сделал, например, канадский роботостроитель DJ Sures.
Посмотрите, какие интересные решения на ее основе сделал, например, канадский роботостроитель DJ Sures.
Пылесос Roomba сам по себе является роботом, но, дополненный платой EZ-B, он получает массу дополнительных возможностей.
Игрушки в его «лаборатории» в буквальном смысле слова оживают. Особое впечатление производит тюнингованный робот-пылесос Roomba от компании iRobot, получивший благодаря DJ Sures зрение и способность распознавать голосовые команды.
Пробуйте!
Рассмотренные робототехнические платформы — лишь малая часть того, что придумали любители роботов по всему миру.
Их, конечно, можно считать забавой, несерьезными игрушками. Но стоит помнить, что игрушки эти могут быть созданы вашими собственными руками. И в процессе их создания и отладки вы научитесь многим вещам, позволяющим вам упростить освоение более сложных проектов, связанных с электроникой, программированием контроллеров и созданием автономных интерактивных систем.
Именно эту цель и преследуют наборы Robot Kits и открытые аппаратные робоплатформы. Они, возможно, ваш первый шаг к будущему хобби на всю жизнь или даже любимой профессии.
Автор: Евгений Лебеденко.
P.S. Приобрести EZ-Robot по интересной цене можно в России на сайте www.ez-robot.ru
робототехника
Если у вас есть статья, заметка или обзор, которыми вы хотите поделиться с аудиторией нашего сайта, присылайте информацию на: [email protected].
Комментариев нет. Стань первым!
технологии недели • ТНТ MUSIC — Здесь твоя музыка
В сегодняшнем обзоре гаджетов и современных разработок мы предлагаем подняться в воздух на байке, сыграть в самую депрессивную компьютерную игру современности, собрать себе VR-шлем, заплатить за проезд красивыми глазами и не только. Вашему вниманию — всё самое интересное из мира технологий.
Кадр из видео
Летающий мотоцикл
Какой самый быстрый способ передвигаться в пробке? – Мотоцикл. А что может быть быстрее мотоцикла? – Летающий мотоцикл. И в самом скором времени вы сможете такой приобрести. К сожалению, его ещё не построили, но собираются. Компания, специализирующаяся на реактивных ранцах, представила новый проект. И даже объявила сбор средств на него. Всего планируют сделать четыре вида летающих байков: военный, грузовой, сверхлёгкий и для активного отдыха. Отличаться они будут скоростью и грузоподъёмностью. Разработчики уверяют, что их детище способно подниматься на высоту 115 км и разгоняться до 240 км/ч. Цена вопроса – предварительно чуть меньше 400 тысяч долларов.
А что может быть быстрее мотоцикла? – Летающий мотоцикл. И в самом скором времени вы сможете такой приобрести. К сожалению, его ещё не построили, но собираются. Компания, специализирующаяся на реактивных ранцах, представила новый проект. И даже объявила сбор средств на него. Всего планируют сделать четыре вида летающих байков: военный, грузовой, сверхлёгкий и для активного отдыха. Отличаться они будут скоростью и грузоподъёмностью. Разработчики уверяют, что их детище способно подниматься на высоту 115 км и разгоняться до 240 км/ч. Цена вопроса – предварительно чуть меньше 400 тысяч долларов.
Самодельные VR-шлемы
Просто играть в приставку — это неинтересно. То ли дело с VR-шлемом. А теперь представьте, что именно у вас будет самый оригинальный гаджет виртуального зрения.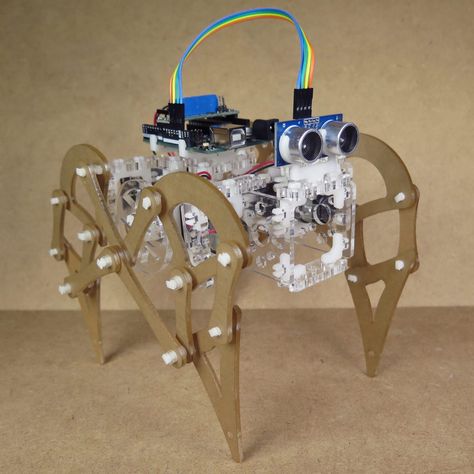 Одна из известных компаний выпустила занятный набор. Купив его, любой желающий сможет почувствовать себя дизайнером. В коробке, помимо геймпада, имеется выкройки из картона, собрав которые, вы получите VR-шлемы. Пока есть лишь несколько модификаций: птица, слон, фотоаппарат, ну, или стандартный вариант.
Одна из известных компаний выпустила занятный набор. Купив его, любой желающий сможет почувствовать себя дизайнером. В коробке, помимо геймпада, имеется выкройки из картона, собрав которые, вы получите VR-шлемы. Пока есть лишь несколько модификаций: птица, слон, фотоаппарат, ну, или стандартный вариант.
Фото: Twitter
Может, со стороны и выглядит странно. Но, по задумке, каждый гаджет отлично впишется в конкретные игры. Продажа наборов стартует в начале апреля. Готовьтесь выложить за разноцветный картон около 80 долларов.
Фото: Twitter
Робот-бабочка
Робот-собака, робот-человек… Этим нас уже не удивить. Французский инженер Эдвин Ван Руймбеке представил робота-бабочку. Механическим насекомым сможет управлять любой желающий. Сломать гаджет будет непросто. Корпус выполнен из полипропилена, углеродного волокна и полимеров. Размах крыльев – 29 см, вес – всего 10 граммов. Питается бабочка от обычного аккумулятора. Все маневры совершаются не за счёт крыльев, а за счёт хвоста. Максимальная скорость не очень большая – всего 18 км/ч. Логичный вопрос: зачем такой робот нужен вообще? Пока создатель видит в нём лишь красивую игрушку. А там, кто знает — вдруг бабочке найдут полезное применение? На этапе сбора средств гаджет обойдётся в 78 долларов.
Все маневры совершаются не за счёт крыльев, а за счёт хвоста. Максимальная скорость не очень большая – всего 18 км/ч. Логичный вопрос: зачем такой робот нужен вообще? Пока создатель видит в нём лишь красивую игрушку. А там, кто знает — вдруг бабочке найдут полезное применение? На этапе сбора средств гаджет обойдётся в 78 долларов.
Оплата проезда лицом
Всё-таки в некоторых вопросах Китай — впереди планеты всей. Вполне возможно, что скоро жителям Поднебесной вообще не понадобится носить с собой деньги. Телефон и банковские карты тоже можно будет оставить дома. В стране тестируют систему оплаты проезда по распознаванию лиц. Чтобы попасть в транспорт достаточно подойти к турникету, на котором находится планшет. Система отсканирует вас, проанализирует информацию, поделится ей с вами, и если всё в порядке, то вы попадете в поезд. Удобно! Если технология успешно приживется, то её планируют внедрить и во все остальные сферы.
Удобно! Если технология успешно приживется, то её планируют внедрить и во все остальные сферы.
Фото: Twitter
Умная трость для слабовидящих
Российские разработчики тоже радуют. Встречайте – умная трость. Она создана для людей с проблемами зрения. Гаджет оснащён искусственным интеллектом. Он умеет распознавать предметы (в том числе и в тёмное время суток), определять расстояния и даже запоминать лица людей. Последних трость фотографирует и вносит в свою базу. Обо всех препятствиях на пути устройство сообщит вибросигналом.
Фото: «Сенсор-Тех»/Facebook
С помощью трости можно найти интересующие вас вещи. Например, где лежат ключи, а где — вилка. Гаджет оснащён несколькими камерами, микрофоном и ультразвуковым датчиком.
Фото: «Сенсор-Тех»/Facebook
Игра-тлен
В начале марта мир увидел компьютерную игру с оригинальным названием «ШХД: ЗИМА». Сделали её поэт Илья Мазо и разработчик Александр Игнатов. Никаких стрелялок или загадок. Вся суть – бродить по обычной российской многоэтажке. Из квартиры вы сможете выбраться только во двор. Ещё будет возможность вынести мусор, пожарить яичницу и прогуляться до закрытых ларьков.
Никаких стрелялок или загадок. Вся суть – бродить по обычной российской многоэтажке. Из квартиры вы сможете выбраться только во двор. Ещё будет возможность вынести мусор, пожарить яичницу и прогуляться до закрытых ларьков.
Смотрится всё депрессивно. Но на Западе развлекаловка тоже вызвала интерес. Как признались создатели, на самом деле это не игра, а арт-проект. В него ещё входят книга, спектакль и фильм. Но об этом как-нибудь в другой раз.
Понравилась новость?
Расскажите друзьям:
Читайте также:
Технологии
Кибербезопасность: с чем сейчас борются антивирусы?
Читайте наш новый технологичный обзор!
Технологии
Видеонаблюдение: лучшие программы
Рассказываем о сервисах для настройки IP-камер, а также архивации снятой хроники.
Технологии
Когда откроются границы: выбираем электронного помощника в изучении иностранного языка
Налаживаем контакты на удалёнке и готовимся к будущим путешествиям!
Новости СМИ2
самодельных роботов | Пресс без крахмала
10 Простых ботов для строительства с вещами вокруг дома
от Рэнди Сарафана
августа 2021 г., 192 стр.
ISBN-13:
9781718500235
Полный цвет
ПИНА PDF, Mobi и ePub), $10,99
Загляните внутрь!
Загрузить Глава 10: SKITTER
Самодельные роботы — это руководство для начинающих по сборке разнообразных мобильных автономных ботов из обычных бытовых материалов. Его 10 креативных и простых в исполнении проектов предназначены для максимального удовольствия с минимальными усилиями — опыт работы с электроникой не требуется!
От качающегося воблера до катящегося баррелера, каждый бот является самоуправляемым и обладает уникальным характером. Есть точно названный Inchworm Bot, сделанный из алюминиевых линеек; Buffer, бот, похожий на дворника, который полирует пол во время ходьбы; и Sail Bot, который меняет направление в зависимости от ветра.
Есть точно названный Inchworm Bot, сделанный из алюминиевых линеек; Buffer, бот, похожий на дворника, который полирует пол во время ходьбы; и Sail Bot, который меняет направление в зависимости от ветра.
Хакерский подход Рэнди Сарафана к скульптурной робототехнике понравится строителям всех возрастов. Вы изучите основы электроники, освоитесь с инструментами и механическими системами и обретете уверенность в себе, чтобы продолжить самостоятельное изучение. Вам предстоит открыть для себя огромный мир роботов, и Самодельные роботы — идеальная отправная точка.
Биография автора
Рэнди Сарафан работает на Instructables.com более десяти лет и опубликовал более 300 статей с практическими рекомендациями для Интернета, сборников книг и журналов по широкому кругу вопросов — от гигантских ездовых роботов к ромашковому мороженому. Он также руководит командой сообщества Instructables, создает онлайн-классы и является автором 62 проектов, которые нужно сделать с мертвым компьютером (Workman Publishing).
Table of contents
Introduction
Chapter 1: Building Tools and Supplies
Chapter 2: Getting Started with Electronics
Chapter 3: Motors
Chapter 4: Soldering and Desoldering
Chapter 5 : Воблер
Глава 6: Буфер
Глава 7: Daze
Глава 8: Барреллер
Глава 9: Ленивый
Глава 10: Skitter
Глава 11: дюйм -червя
Глава 12: Walker
Глава 13: SAIL
Глава 14: Flip Flop
Приложение A: Справочные материалы
Посмотреть приложение B: .
Отзывы
«Если вы хотите вдохновить будущего инженера-робототехника, обратите внимание на книгу «Самодельные роботы». В этой книге рассказывается, как легко собирать роботов из недорогих электрических компонентов и повседневных предметов домашнего обихода. легко следовать инструкциям, вы будете работать над все более техническими сборками, изучая новые способы заставить роботов двигаться, например, ползать, вилять, катиться и ползать по всему полу».
—Майк Уоррен, дизайнер, изобретатель и автор бестселлера Cut in Half: The Hidden World Inside Everyday Objects
«Это выглядит [как] хорошо».
— Алан Уильямс, мастер по гаджетам
«Это самое быстрое руководство по созданию и перемещению ботов, которое я когда-либо видел, но оно также разделяет любовь и признательность за роботов как к новой забавной среде для самовыражения. вместо этого ключевые аспекты того, что вам нужно, чтобы сделать забавных роботов как можно скорее, ясны, просты и забавны!»
—Доктор. Эндрю Джеймс Куитмайер, директор Лаборатории цифрового натурализма
«Я могу поручиться за удовольствие, так как я тестировал некоторых роботов из книги».
—Бекки Стерн, Digi-Key
» Самодельные роботы Книга очень продуманно сконструирована — вдохновение от роботов сочетается с практическим изучением техник и методов. Эта книга могла бы сэкономить мне много времени в моем путешествии. »
»
— Эрик Дж. Вильгельм, основатель Instructables
«Вы получите массу удовольствия, создавая этих шатких и дурацких роботов, которых вы выпускаете на свободу, чтобы таскаться по дому. Однако вы можете не осознавать, что вы только что приобрели базовые навыки инженера-электромеханика, и методы, изложенные в этой книге, используются всеми роботами, от самых неуклюжих до самых сложных».
— Alex S, Fuzzy Wobble, Toy Maker
«Не совсем сверхъестественная долина, но балансирующая на грани недоверия, книга Рэнди Сарафана о роботах, сделанных из повседневных предметов домашнего обихода, вдохнет жизнь в обыденные предметы и пополнит вашу семью членами, которых вы не надо гулять, умываться и кормить. Отличная книга!»
— Паула Франкель Левин, профессор Школы искусств Государственного университета Сан-Франциско. нравится и молодым, и старым».
— Дэн Мур, креативный технолог, Make It Do A Thing
«Подход Рэнди Сарафана к обучению робототехнике освежающий, увлекательный, доступный и (самое главное) увлекательный. Использование повседневных материалов в каждом проекте поистине блестяще. . Четкая документация и продуманные учебные пособия демистифицируют начало работы с электроникой и быстро побуждают читателей освоиться с инструментами и двигателями. Не терпится превратить все в маленького робота!»
Использование повседневных материалов в каждом проекте поистине блестяще. . Четкая документация и продуманные учебные пособия демистифицируют начало работы с электроникой и быстро побуждают читателей освоиться с инструментами и двигателями. Не терпится превратить все в маленького робота!»
— Одри Лав, Echo Echo Studio
» Самодельные роботы — обязательная книга не только для новичков в увлекательном мире DIY, но и для преподавателей, которые хотят научиться преподавать сложные концепции в весело. Рэнди включил не только некоторые из своих классических творений, но и несколько новых, с интересным и забавным поведением, которое побудит вас исследовать, экспериментировать и творить».
— Марио Кайседо Лангер, преподаватель STEAM и профессиональный создатель
«В большинстве книг о роботах-конструкторах предполагается, что у вас есть доступ к цифровым производственным инструментам, что у вас есть навыки конструирования и вам нужен программируемый робот. бюджеты, показывая читателю, как сделать 10 различных роботов из обычных или недорогих предметов. Простое, но подробное введение в инструменты, электронику и методы строительства гарантирует участие тех, кто еще не освоил эти навыки».
бюджеты, показывая читателю, как сделать 10 различных роботов из обычных или недорогих предметов. Простое, но подробное введение в инструменты, электронику и методы строительства гарантирует участие тех, кто еще не освоил эти навыки».
— Майкл Шайло, адъюнкт-профессор практики интерактивных медиа, Нью-Йоркский университет Абу-Даби
«Если у вас есть хорошие навыки верстальщика и ассортимент некоторых наиболее распространенных материалов, эта книга будет хорошим выбором… Все библиотечные системы должны иметь эту книгу. Она станет хорошим дополнением к университетской библиотеке».
— Элиана, 12 лет, Kids’ BookBuzz
10 простых ботов, которые можно собрать из предметов вокруг дома @RandySarafan #Robotics « Adafruit Industries – Создатели, хакеры, художники, дизайнеры и инженеры!
Новая книга: Самодельные роботы: 10 простых ботов, которые можно собрать из предметов по дому.
 Автор: @RandySarafan #Robotics Роботы: 10 простых ботов, которые можно собрать из домашних вещей, Рэнди Сарафан.
Автор: @RandySarafan #Robotics Роботы: 10 простых ботов, которые можно собрать из домашних вещей, Рэнди Сарафан. Самодельные роботы – руководство для начинающих по созданию широкого спектра мобильных автономных ботов из обычных бытовых материалов. Его 10 креативных и простых в исполнении проектов предназначены для максимального удовольствия с минимальными усилиями — опыт работы с электроникой не требуется!
От качающегося воблера до катящегося баррелера, каждый бот является самоуправляемым и обладает уникальным характером. Есть точно названный Inchworm Bot, сделанный из алюминиевых линеек; Buffer, бот, похожий на дворника, который полирует пол во время ходьбы; и Sail Bot, который меняет направление в зависимости от ветра.
Хакерский подход Рэнди Сарафана к скульптурной робототехнике понравится строителям всех возрастов. Вы изучите основы электроники, освоитесь с инструментами и механическими системами и обретете уверенность в себе, чтобы продолжить самостоятельное изучение.
Откройте для себя огромный мир роботов, и Самодельные роботы — идеальная отправная точка.
Мини-обзор от Adafruit
Мне прислали копию, и это прекрасное чтение. Книга не предполагает, что вы знакомы со сложными вещами, такими как электрические схемы или производство, — она объясняет концепции удивительно легко и терпеливо. При этом можно собрать десять забавных роботов из предметов, которые могут лежать у вас дома. Благодаря большему количеству дистанционного обучения и домашнего обучения в этом году это было бы отличным дополнением к домашнему обучению, а также созданию и помощи любопытным людям, чтобы начать работу с концепциями создания и робототехники без необходимости иметь высшее образование.
Интервью
Adafruit задает автору Рэнди Сарафану несколько вопросов:
Это ваша первая книга?
Самодельные роботы — моя вторая книга. В моей первой книге «62 Project to Make with a Dead Computer» речь шла о перепрофилировании старых компьютеров (и других электронных устройств), чтобы дать им новую жизнь в виде проектов «сделай сам». Хотя некоторые из проектов в книге все еще актуальны, ряд устройств, которые я перепрофилировал, уже устарели, когда я писал книгу в 2008 году, и теперь могут считаться музейными артефактами.
Хотя некоторые из проектов в книге все еще актуальны, ряд устройств, которые я перепрофилировал, уже устарели, когда я писал книгу в 2008 году, и теперь могут считаться музейными артефактами.
Чем вы занимаетесь, немного о себе и т. д.
Я работаю в Instructables почти 15 лет и работала редактором по технологиям, ведущим создателем контента и совсем недавно менеджером сообщества. За это время я опубликовал более 350 инструкций по широкому кругу вопросов. Я постоянно работаю, учусь и создаю что-то новое.
Что вдохновило вас на написание книги о роботах?
После окончания колледжа я провел три недели, обучая робототехнике младших школьников. Мы использовали коммерческие комплекты роботов, и к концу первой недели половина деталей отсутствовала. Ко второй неделе у них у всех были наполовину построенные роботы, которых можно было запрограммировать, но они были практически бесполезны. К прошлой неделе мы полностью отказались от наборов и начали создавать арт-роботов, используя вибрирующие моторы, бумажные стаканчики, резиновые ленты и маркеры. Это было намного проще, дешевле, быстрее и во всех отношениях веселее, чем дорогие комплекты роботов, которые выдавали.
Это было намного проще, дешевле, быстрее и во всех отношениях веселее, чем дорогие комплекты роботов, которые выдавали.
Этот опыт заставил меня задуматься над тем, почему это произошло. Во-первых, когда вы собирали роботов из деталей, которые можно найти под рукой, никогда не было «неправильных» или отсутствующих деталей. Также не было «правильного» способа построить этих роботов, и дети могли свободно модифицировать их по своему усмотрению. Кроме того, не было больших технических барьеров или зависимостей, стоящих на пути к получению результатов. Для меня важно было не то, что ученики собирали роботов, которые выполняли определенную задачу, например, следование по линии, а изучали технологии, проявляли творческий подход и получали удовольствие от открытой игры.
Случайно через несколько лет у меня появился друг, который постоянно говорил, что хочет научиться строить роботов, но это слишком сложно. Вспомнив свой прежний опыт обучения роботов, я решил использовать эти принципы, чтобы быстро построить простого робота, чтобы показать ему, насколько это может быть просто. Мне было очень весело это делать, и я решил построить еще один, а потом еще и еще. Следующее, что я знаю, я пишу книгу.
Мне было очень весело это делать, и я решил построить еще один, а потом еще и еще. Следующее, что я знаю, я пишу книгу.
Кто ваша целевая аудитория? Как вы думаете, кто больше всего выиграет от этого?
Эта книга предназначена для всех, кто хочет весело провести время и проявить творческий подход, приступая к работе с робототехникой. Единственное требование состоит в том, что вы должны быть достаточно зрелыми, чтобы обращаться с электродрелью и паяльником, или вы можете получить помощь от того, кто это делает.
Даже если вы какое-то время занимаетесь сборкой роботов, я надеюсь, что эта книга все же содержит некоторую информацию, которая может оказаться для вас интересной или полезной.
Зачем писать книгу по робототехнике, когда есть другие ресурсы, такие как Instructables? Почему бы не посты в блоге или серию видео?
На самом деле все это началось с серии инструкций! По мере продвижения я начал рассматривать это как целостный проект, который не может быть полностью инкапсулирован с помощью одноразовых руководств. Я хотел создать четкое руководство, чтобы поделиться своей конкретной теорией создания роботов вместе с примерами проектов. Книга казалась лучшим способом добиться этого.
Я хотел создать четкое руководство, чтобы поделиться своей конкретной теорией создания роботов вместе с примерами проектов. Книга казалась лучшим способом добиться этого.
Кроме того, несмотря на то, что руководства по технологиям часто быстро устаревают, я думаю, что информация, которой я делюсь, более актуальна. Я уверен, что через 10 или даже 20 лет кто-то сможет взять в руки эту книгу и все же что-то из нее извлечь. Хотя я надеюсь, что такие веб-сайты, как Instructables, все еще существуют и будут процветать через 20 лет, сейчас я оглядываюсь назад на цифровое искусство, которое я создавал два десятилетия назад, и большая его часть исчезла из Интернета. Хотя нас заставляют верить, что цифровая информация будет жить в сети вечно, я искренне верю, что книги по-прежнему имеют более длительный срок хранения (в прямом и переносном смысле).
И, если вы когда-нибудь перерастете книгу, вы разовьете знания и навыки, чтобы превратить ее в робота. Вы не можете сделать это с видео!
Планируете ли вы позже сделать несколько видео и других материалов для книги?
Я планирую регулярно публиковать информацию о роботах на Instructables, поэтому следите за моим профилем там. Я также публикую обновления в Instagram под @madeineuphoria и (совсем) недавно завел аккаунт в TikTok.
Я также публикую обновления в Instagram под @madeineuphoria и (совсем) недавно завел аккаунт в TikTok.
Нужна ли мне определенная предыстория для продолжения? У вас есть какие-нибудь рекомендации?
Я специально написал эту книгу для начинающих, и никакой специальной подготовки не требуется. Я призываю вас быть любопытными, творческими и терпеливыми к себе. Не расстраивайтесь, если с первого раза не получится. Кроме того, примите свои ошибки. Иногда неожиданные результаты могут привести к более интересным местам, чем то, куда вы пытались попасть в первую очередь.
Итак, я дочитал эту книгу, что дальше?
После того, как вы освоите сборку роботов, описанных в этой книге, следующим шагом, скорее всего, станет изучение микроконтроллеров, электроники и датчиков. Вы можете найти список дополнительных ресурсов в приложении.
Планируете ли вы дополнительные книги в будущем?
Эта книга создавалась более 10 лет, и я рад, что она наконец увидела свет. Это огромный груз с моих плеч. На данный момент я счастлив сделать паузу и отпраздновать эту книгу. Тем не менее, я начал обрисовывать в общих чертах по крайней мере пять будущих книг.
Это огромный груз с моих плеч. На данный момент я счастлив сделать паузу и отпраздновать эту книгу. Тем не менее, я начал обрисовывать в общих чертах по крайней мере пять будущих книг.
Спасибо, Рэнди, за то, что нашел время поговорить с нами, и всяческих успехов с книгой!
Книга самодельных роботов: 10 простых ботов, которые можно собрать из подручных материалов от No Starch Press, и их можно приобрести у стандартных розничных продавцов по всему миру. Я надеюсь, что библиотеки также выберут это для справки.
Хватит макетировать и паять – немедленно приступайте к изготовлению! Игровая площадка Adafruit’s Circuit Playground битком набита светодиодами, датчиками, кнопками, клипсами типа «крокодил» и многим другим. Создавайте проекты с помощью Circuit Playground за несколько минут с помощью сайта программирования MakeCode с функцией перетаскивания, изучайте информатику с помощью класса CS Discoveries на code. org, переходите в CircuitPython, чтобы вместе изучать Python и аппаратное обеспечение, TinyGO или даже используйте Arduino. ИДЕ. Circuit Playground Express — новейшая и лучшая плата Circuit Playground с поддержкой CircuitPython, MakeCode и Arduino. Он имеет мощный процессор, 10 NeoPixels, мини-динамик, инфракрасный прием и передачу, две кнопки, переключатель, 14 зажимов типа «крокодил» и множество датчиков: емкостное касание, ИК-близость, температура, свет, движение и звук. Целый огромный мир электроники и кодирования ждет вас, и он умещается на вашей ладони.
org, переходите в CircuitPython, чтобы вместе изучать Python и аппаратное обеспечение, TinyGO или даже используйте Arduino. ИДЕ. Circuit Playground Express — новейшая и лучшая плата Circuit Playground с поддержкой CircuitPython, MakeCode и Arduino. Он имеет мощный процессор, 10 NeoPixels, мини-динамик, инфракрасный прием и передачу, две кнопки, переключатель, 14 зажимов типа «крокодил» и множество датчиков: емкостное касание, ИК-близость, температура, свет, движение и звук. Целый огромный мир электроники и кодирования ждет вас, и он умещается на вашей ладони.
Присоединяйтесь к более чем 35 000 создателей на каналах Adafruit в Discord и станьте частью сообщества! http://adafru.it/discord
Хотите поделиться потрясающим проектом? Выставка Electronics Show and Tell проходит каждую среду в 19:00 по восточному времени! Чтобы присоединиться, зайдите на YouTube и проверьте чат шоу — мы опубликуем ссылку там.
Присоединяйтесь к нам каждую среду в 20:00 по восточноевропейскому времени, чтобы задать вопрос инженеру!
Подпишитесь на Adafruit в Instagram, чтобы быть в курсе совершенно секретных новых продуктов, закулисья и многого другого https://www. instagram.com/adafruit/
instagram.com/adafruit/
CircuitPython — Самый простой способ программирования микроконтроллеров — CircuitPython.org
Maker Business — Проблемы в торговле между Китаем и США, отмеченные законопроектом о принудительном труде = ==.
Python для микроконтроллеров — Информационный бюллетень Python для микроконтроллеров: Модернизация старых компьютеров, Pinguin и многое другое! #CircuitPython @micropython @ThePSF @Raspberry_Pi
Ежемесячный выпуск Adafruit IoT — канарейка CO2 в угольной шахте, приколы AQI и многое другое!
Microsoft MakeCode — MakeCode Спасибо!
EYE on NPI — понижающий силовой модуль Maxim Himalaya uSLIC #EyeOnNPI @maximintegrated @digikey
Новые продукты — Adafruit Industries — Создатели, хакеры, художники, дизайнеры и инженеры! — НОВЫЙ ПРОДУКТ — Датчик газа MOX Adafruit ENS160 — Модернизация Sciosense CCS811 — STEMMA QT / Qwiic
Получайте единственный свободный от спама ежедневный информационный бюллетень о носимых устройствах, ведении «производственного бизнеса», электронных советах и многом другом! Подпишитесь на AdafruitDaily. com!
com!
5 самодельных роботов, дающих надежду любителям самоделок (с видео)
Команда разработчиков медиаплатформ
Для Стива Норриса, , создание роботов ручной сборки — идеальное хобби. Он инженер-программист на работе и разнорабочий дома, поэтому робототехника «сделай сам» объединяет его интересы в области аппаратного обеспечения, электроники и искусственного интеллекта. программирование в одном удобном и очень красивом пакете. Бегло взглянув на его каталог из более чем дюжины причудливых и полезных ботов, создается впечатление, что его дом, мало чем отличающийся от дома футуриста Дэниела Х. Уилсона, представляет собой своего рода страну техно-чудес, наполненную роботизированными чудесами. Этот образ не за горами. Он делит свой дом со всевозможными автоматизированными домашними животными и слугами, в том числе с подставкой для ног робота, а также с женой и кошкой, которые терпят механических соседей по дому.
Для Норриса создание бота — это не просто сбор всех запасных частей, которые он найдет. «Прежде чем построить робота, я хочу знать, что он будет делать, — сказал Норрис PM, — какова его цель в жизни». Исходя из этой философии дизайна, Норрис определяет, как должен двигаться робот, какие датчики ему нужны для взаимодействия с миром и каким принципам поведения должен следовать бот. Этот методический подход распространяется и на партии, которые он выбирает. Все его роботы используют 912-мегагерцевые приемопередатчики, чтобы он мог с легкостью управлять всей своей конюшней автоматов. Он использует продуманное сочетание деталей от высококлассных поставщиков для любителей, так что ни одна из его работ не является просто набором или готовым, собранным по инструкции роботом.
«Прежде чем построить робота, я хочу знать, что он будет делать, — сказал Норрис PM, — какова его цель в жизни». Исходя из этой философии дизайна, Норрис определяет, как должен двигаться робот, какие датчики ему нужны для взаимодействия с миром и каким принципам поведения должен следовать бот. Этот методический подход распространяется и на партии, которые он выбирает. Все его роботы используют 912-мегагерцевые приемопередатчики, чтобы он мог с легкостью управлять всей своей конюшней автоматов. Он использует продуманное сочетание деталей от высококлассных поставщиков для любителей, так что ни одна из его работ не является просто набором или готовым, собранным по инструкции роботом.
Норрис часто публикуется в журнале Robot Magazine, который выходит раз в два месяца и в котором фигурирует несколько его роботов. Помимо своих собственных творений, ему нравится линия iRobot для ухода за домом: несколько новых пылесосов Roomba патрулируют его дом в поисках пыли… и Scooba для мытья полов.
51-летний будущий художник говорит, что его любимый робот — HAL 9000 из 2001: Космическая одиссея . Что ж, эти самодельные творения могут быть не такими страшными, творения Стива Норриса настоящие, функциональные и очень веселые. Обратите внимание на эти пять избранных:
Стоунхенджские роботизированные цифровые часы
Группа разработчиков медиа-платформ
Стоунхенджские часы представляют собой роботизированную руку, которая переставляет набор стоячих пронумерованных карточек для отображения времени. Стоунхендж оказался почти таким же зрелищем, как и его тезка. Причудливое очарование, которое бот продемонстрировал в коротком видео на YouTube (ниже), привлекло внимание крупного дистрибьютора электроники, который связался с Норрисом, чтобы построить более мощный Стоунхендж для демонстрации в вестибюле своей штаб-квартиры.
[youtube]http://www.youtube.com/v/pH0HLXnXljY&hl=en&fs=1&rel=0&color1=0x006699&color2=0x54abd6[/youtube]
Из всех своих творений Норрис считает часы Стоунхенджа «очень легко построить самому». Все, что вам нужно, это умная рука CrustCrawler за 800 долларов и набор пронумерованных карточек. CrustCrawler поставляется с микросхемой Parallax Propeller, представляющей собой универсальный микроконтроллер с восемью процессорами — по сути, восемью мозгами. Это жизненно важно, поскольку в робототехнике, говорит Норрис, «вам всегда нужно делать много вещей одновременно», от запуска двигателей и различных датчиков до программирования процессора, который будет действовать как координатор функций. Если это звучит сложно, не волнуйтесь: здесь Норрис бесплатно предоставляет исходный код, управляющий его рукой.
Все, что вам нужно, это умная рука CrustCrawler за 800 долларов и набор пронумерованных карточек. CrustCrawler поставляется с микросхемой Parallax Propeller, представляющей собой универсальный микроконтроллер с восемью процессорами — по сути, восемью мозгами. Это жизненно важно, поскольку в робототехнике, говорит Норрис, «вам всегда нужно делать много вещей одновременно», от запуска двигателей и различных датчиков до программирования процессора, который будет действовать как координатор функций. Если это звучит сложно, не волнуйтесь: здесь Норрис бесплатно предоставляет исходный код, управляющий его рукой.
Стоунхендж в настоящее время пересматривается, чтобы улучшить его производительность. Норрис обнаружил, что задержка в командах руке иногда могла привести к тому, что часы отставали настолько, что ему приходилось искусственно пропускать вперед, чтобы сохранить правильное время. В ближайшие несколько месяцев он надеется представить миру более сильный, быстрый и своевременный Стоунхендж.
Платформа для мобильных камер RoboCam
Группа разработчиков медиаплатформ
Даже находясь вдали от дома, Норрис может мгновенно оказаться в своем доме с помощью своего робота телеприсутствия с веб-камерой на палке. Веб-камера, установленная на двухфутовой трубе из ПВХ, возвышается на три фута над землей. Это можно проверить с помощью веб-сервера, к которому Норрис обращается через свой ноутбук по выходным, чтобы он мог убедиться, что все двери и окна по-прежнему закрыты, и что его кошка Мона все еще хорошо играет с остальными ее частями. компаньоны.
RoboCam также выигрывает от использования iRobot Create в качестве основы. В стандартную комплектацию Create входит большинство датчиков, которые нужны Норрису, а также запрограммированная возможность парковаться на зарядной станции. Когда Норрис заканчивает патрулировать свой дом, он просто направляет RoboCam обратно к зарядной станции, а об остальном позаботится сам.
В отличие от многих других творений Норриса, RoboCam не имеет реальной автономной работы, за исключением возможности стыковки. Однако он полностью наворочен датчиками — настолько, что Норрис описывает его управление как «защитное». Он не позволит ему подойти достаточно близко к объектам, чтобы столкнуться с ними, и оснащен датчиками обрыва, которые остановят робота, а не позволят ему упасть с лестницы. Тем не менее, управлять RoboCam из любой точки страны не всегда просто. «Точно так же, как с марсоходом НАСА: вы делаете что-то не так, вы не можете это исправить», — говорит нам Норрис. Чтобы помочь своему восприятию глубины, Норрис установил лазерную указку, которая наклонена вниз таким образом, что светит красной точкой примерно в трех футах перед ботом.
Норрис видит широкий спектр применений технологии телеприсутствия, особенно в сочетании с роботами, и считает, что различные приложения найдут свое место в ближайшем будущем. Все возможно, от предоставления людям на противоположных концах мира возможности общаться друг с другом, до более альтруистических целей, таких как уход за пожилыми людьми.
RoboStool Мебель по требованию
Команда разработчиков медиаплатформ
Концепция RoboStool возникла из вопроса, который Норрис задал себе во время похода по магазинам: «Почему бы не превратить табуретку в робота?» Внезапно он обнаружил, что ищет именно то, что нужно: табурет, который «мог бы удерживать электронику» с «достаточно легкой крышкой, чтобы сидеть на шасси». Кто бы мог подумать: яркий блок коричневого винила, который он забрал домой из Bed Bath & Beyond, также оказался его любимым ботом.
Почему бы и нет? RoboStool трудно не любить. Он будет верно следовать за вами, а затем сядет за вас, чтобы вы могли дать отдых своим ногам, когда садитесь. Он оснащен множеством датчиков, которые позволяют управлять им тремя различными способами: дистанционно, с помощью навигационной системы с инфракрасным маяком, в которой бот перемещается к определенным путевым точкам (см. Видео ниже), и в режиме «Следуй за мной». с помощью термодатчика.
с помощью термодатчика.
[youtube]http://www.youtube.com/v/lPnwycXY6lk&hl=en&fs=1&rel=0&color1=0x006699&color2=0x54abd6[/youtube]
Конечно, эта большая крышка на RoboStool имеет решающее значение. Норрис установил его на два поршня, которые поднимают его и обнажают лицо, похожее на краба-отшельника, на котором установлены основные звуковые и тепловые датчики бота. Первый помогает RoboStool измерять расстояние, но тепловое отслеживание «самое интересное», отметил Норрис. Для него и его компании очень приятно, что RoboStool следует за ними повсюду. С поднятой крышкой он выглядит почти очаровательно в стиле Wall-E.
В основании RoboStool находятся датчики, которые предотвращают его столкновение с предметами. Пара инфракрасных датчиков предотвращает столкновение со стенами и людьми, а дополнительный звуковой датчик посылает сигналы, которые будут держать RoboStool в курсе того, что впереди. Единственное, чего не хватает RoboStool, так это датчика обрыва RoboCam, поскольку он патрулирует второй этаж на предмет усталости ног, хотя Норрис никогда не попадал в аварии ни с одним из своих ботов. «Удивительно, но ни один из них не пострадал», — сказал он.
«Удивительно, но ни один из них не пострадал», — сказал он.
Это настолько полностью реализованный робот-компаньон, что посетители его веб-сайта часто принимают его за профессионально изготовленный продукт. «Люди получают от этого самое большое удовольствие, — говорит Норрис. «[Это], вероятно, будет со мной навсегда, потому что это такая забавная вещь, и все хотят ее увидеть».
Huey Color Chasing Robot
Команда разработчиков медиаплатформ
Huey может показаться маленьким и простым — в конце концов, это по сути термодатчик, установленный на колесах, — но Норрис утверждает, что бот — его «самая сложная машина, даже несмотря на то, что он меньше, чем большинство других». Он следует трем правилам робототехники, а не правил, как их определил Айзек Азимов, но он все равно гордился бы: 1. Всегда смотрите на то, что он отслеживает; 2. Всегда двигайтесь к тому, что он отслеживает; и 3. Если он окажется слишком близко к тому, к чему движется, отступите.
В основе сложной системы Huey лежит CMUcam2+, надежная комбинация микроконтроллера и камеры, которая обрабатывает визуальную информацию, такую как изменение цвета. Отслеживание цвета позволяет Хьюи реагировать на различные оттенки (Hue-y) различными способами — например, он может убежать от кого-то в синей рубашке или преследовать любого с ярко-розовым квадратом бумаги в руке. Однако по большей части Хьюи следует своим трем указаниям и безжалостно преследует все, что выслеживает, как взволнованный щенок. Технологии, использованные при создании и программировании Хьюи, наверняка появятся в будущих ботах Норриса.
«Меня всегда восхищала эта концепция робота, который следует за вами», — говорит Норрис PM. Он обнаруживает, что три руководящих принципа Хьюи могут заставить его действовать удивительным образом, например, выполнять изящные трехочковые повороты. Хьюи «никогда не был запрограммирован на выполнение трехочкового поворота, но он делает это благодаря этим трем факторам», — говорит Норрис. Это признак эмерджентного поведения: когда робот выполняет действия, которые специально не продиктованы его программой. Вместо того, чтобы просто выйти из-под контроля, Хьюи стал грациозным маленьким парнем. Это приятный результат для Норриса. Он объясняет, что речь идет не об истинном интеллекте, когда речь идет о таком боте, как Хьюи, а о развитии его таким образом, чтобы он «казался очень умным».
Это признак эмерджентного поведения: когда робот выполняет действия, которые специально не продиктованы его программой. Вместо того, чтобы просто выйти из-под контроля, Хьюи стал грациозным маленьким парнем. Это приятный результат для Норриса. Он объясняет, что речь идет не об истинном интеллекте, когда речь идет о таком боте, как Хьюи, а о развитии его таким образом, чтобы он «казался очень умным».
Дистанционное управление на основе жестов RoboWand и не только
Группа разработчиков медиаплатформ
На первый взгляд текущий проект Норриса, RoboWand, напоминает Wii-mote. И хотя идея пришла ему не оттуда (в конце концов, Nintendo не изобрела системы управления на основе жестов), технология похожа на ту, что вы найдете внутри Wii-mote или даже iPhone. Поскольку он использует тот же приемопередатчик 912 МГц, что и большинство его ботов, RoboWand позволит Норрису управлять большинством созданных им роботов, включая RoboCam и RoboStool. Он сможет управлять как направлением, так и скоростью, всего лишь взмахом руки.
Он сможет управлять как направлением, так и скоростью, всего лишь взмахом руки.
Робоманд тоже не так уж и сложен. Он встроен в отрезок трубы из ПВХ и состоит из выключателя, приемопередатчика, акселерометра и бортового одноплатного компьютера. Однако степень контроля, которую он будет предлагать по сравнению с обычным пультом, должна обеспечить Норрису более плавный опыт, когда он выстраивает RoboStool для идеального отдыха.
*****
Итак, что ждет робота-волшебника дальше? Норрис дал нам краткий обзор: он планирует ответить на наиболее часто задаваемый вопрос в робототехнике. Что бы ни делал робот, всегда найдется кто-то, кто хочет знать: «Да, но сможет ли он принести мне пиво?»
Ответ Стива Норриса? «Скоро.»
Он придумывает систему, в которой будут задействованы два робота: один — холодильник; другой, дворецкий. Холодильник все еще находится в стадии разработки, но он планирует, что он сможет обрабатывать два разных напитка в диспенсерах, которые дворецкий может принести. Дворецкий, как только он получает заказ на напиток, отправляет сообщение в RoboFridge, приказывая ему открыться. Затем он «использует дверь холодильника, чтобы выровняться» и стыкуется с ней, извлекая пиво и возвращая его тому, кто его просил.
Дворецкий, как только он получает заказ на напиток, отправляет сообщение в RoboFridge, приказывая ему открыться. Затем он «использует дверь холодильника, чтобы выровняться» и стыкуется с ней, извлекая пиво и возвращая его тому, кто его просил.
И это действительно станет блестящей вехой в развитии робототехники.
Узнайте больше о творениях Норриса на его веб-сайте или посетите роботов, которых вы видели в этой статье:
* Стоунхенджские роботизированные цифровые часы
* Платформа для мобильных камер RoboCam
* Хьюи, робот, преследующий цвета
* The RoboStool
Что можно сделать из материалов, которые можно найти в доме?
Сегодня мы рассмотрим переработку вторичного сырья и то, как мы можем превратить повседневные материалы в нечто прекрасное. Мы будем собирать материалы со всего дома, такие как вторсырье и канцелярские товары, чтобы построить робота.

Роботы — это машины, которые могут выполнять задачу автоматически, независимо от того, управляются ли они с помощью пульта дистанционного управления или управляются встроенным кодом внутри робота. Хотя мы, возможно, не сможем построить полностью функционирующего автоматизированного робота дома, мы можем манипулировать повседневными материалами, чтобы создавать шарнирные движения, которые оживляют нашего робота.
Апсайклинг — это форма вторичной переработки, при которой мы находим способ вторичного использования материалов, которые обычно отправляются прямо на свалку или на перерабатывающий завод, где их разбивают и превращают в новые материалы. Однако переработка по-прежнему требует много ресурсов для сбора вторсырья с мест, доставки его на завод для сортировки, отправки на другие заводы для переработки и так далее. Находя новые способы использования старых материалов, мы можем уменьшить количество мусора на наших свалках и уменьшить углеродный след.
Время разработки этого проекта займет около 5-10 минут, а время сборки может занять 30 минут и более. Этот проект подходит для всех возрастов.
Этот проект подходит для всех возрастов.
Список материалов:
В то время как это список материалов мы использовали для наш бот, ваши материалы могут варьироваться от практически любых! Воображение и дизайнерское мышление являются ключом к тому, чтобы заставить вашего робота работать из материалов, которые у вас есть.
- Картонная коробка
- Кусочки картона
- Картонные трубки
- Кнопки (также можно использовать латунные застежки или скрепки)
- Пластиковые листы (например, разрезанный пластиковый контейнер для выпечки)
- Лента или пистолет для горячего клея и клей-карандаш
- Ершик для труб
- Ножницы
- Вертел (деревянный дюбель или соломинка также могут подойти)
- Дырокол (полезно, но ножницы могут справиться с работой, если вы будете осторожны)
Направления :
Этот проект во многом основан на вашем творчестве — если вы этого не хотите, никакие два робота не будут выглядеть одинаково.
Сначала соберите все материалы. Соберите как можно больше вещей! Проверьте мусорное ведро и попросите у родителей случайные предметы, которые вы можете использовать, и все остальное, что вы можете найти. Чем больше различных материалов у вас есть, тем больше способов вы можете представить и спланировать для создания своего робота.
Теперь пришло время воображать, планировать и проектировать! Какие материалы лучше всего подходят для того, что вы хотите построить? Подумайте о том, что вы хотите, чтобы ваш робот умел делать, и как вы могли бы добиться этого. Например, мы хотели, чтобы голова и руки нашего робота имели движение, поэтому мы подумали о том, как добавить детали, которые могли бы поворачиваться или выдвигаться. Нарисуйте свой план на чистом листе бумаги, в блокноте или в приложении для 3D-рисования.
Теперь приступайте к сборке своего робота. Поскольку все наши роботы могут выглядеть по-разному, вот несколько советов для начала:
- Если у вас уже есть коробка нужного размера, хорошо начать с тела или туловища робота.
 Если нет, вырежьте и соберите коробку по размеру тела вашего робота. Все это можно соединить скотчем или горячим клеем. На самом деле, большинство вещей, которые вам нужны для этого проекта, можно просто склеить или склеить.
Если нет, вырежьте и соберите коробку по размеру тела вашего робота. Все это можно соединить скотчем или горячим клеем. На самом деле, большинство вещей, которые вам нужны для этого проекта, можно просто склеить или склеить.
- Использование дюбелей или карандашей может быть отличным способом заставить предметы поворачиваться или двигаться. Например, мы хотели, чтобы голова нашего робота двигалась из стороны в сторону, поэтому мы взяли шпажку и протолкнули ее через край нашего картона — см. рисунок ниже. Затем я подумал о том, как голова будет выходить из верхней части тела робота и прорезать отверстия по бокам, где шампур мог выйти и иметь свободное движение, а сверху вырезал широкую щель, которая была шире головы, чтобы у него может быть пространство для перемещения из стороны в сторону.
- Вот как можно поворачивать и выдвигать ручки:
- Возьмите четыре трубки от туалетной бумаги и отрежьте две по вертикали, затем закрепите их лентой, чтобы они стали тоньше и могли поместиться внутри других трубок, не вызывая трения вдоль стены
- Затем с двумя другими трубками обрежьте стороны примерно на дюйм от дна.
 Это будет слот для направляющей, поэтому он должен быть достаточно толстым, чтобы в него поместилась шпажка (или соломинка, палочка от эскимо)
Это будет слот для направляющей, поэтому он должен быть достаточно толстым, чтобы в него поместилась шпажка (или соломинка, палочка от эскимо)
- Затем соберите рельсовую систему. В две более тонкие трубки мы собираемся вставить шпажку (или соломинку, палочку от эскимо) примерно на полдюйма от верха.
- Теперь возьмите каждую из своих тонких трубок и поместите их, направляющим концом вперед, в трубки с прорезанными в них прорезями, затем осторожно заклейте концевое отверстие, не скрепляя трубки вместе. Идея состоит в том, что внутренняя труба будет скользить по дорожке, не проваливаясь. Это может потребовать проб и ошибок.
- Не забудьте украсить! Весь этот процесс позволяет вам задействовать свое творческое мышление, когда вы работаете над созданием своего робота. Помните, что разработка чего-то с нуля — это повторяющийся процесс, а это означает, что вам может потребоваться переосмыслить и переработать несколько раз, прежде чем они будут завершены, и это нормально.
 Постарайтесь не унывать. Чем больше мы стараемся, тем больше мы узнаем, и тем больше удовольствия мы можем получить!
Постарайтесь не унывать. Чем больше мы стараемся, тем больше мы узнаем, и тем больше удовольствия мы можем получить!
Как адаптироваться для учащихся младшего и старшего возраста
Для младших школьников сосредоточьтесь на создании классного робота, даже если у него нет движущихся частей. Предложите маленьким детям включить хотя бы одну подвижную часть, например руку или голову. Даже крутящиеся пуговицы по бокам или на груди было бы весело!
Для учащихся старшего возраста: посмотрите, сможете ли вы найти какие-нибудь старые игрушки или компьютеры и открыть их (под присмотром взрослых и с помощью соответствующих инструментов), чтобы найти что-нибудь, что могло бы либо придать вашему роботу крутой вид, либо, если деталь работает, светящийся светодиод или моторизованный компонент к вашему роботу. Светодиод означает светоизлучающий диод, и у них есть анодный (+) и катодный (-) провода, которые должны быть подключены к источнику питания, чтобы загореться, обычно около 2-3 вольт, поэтому обычная батарейка поможет.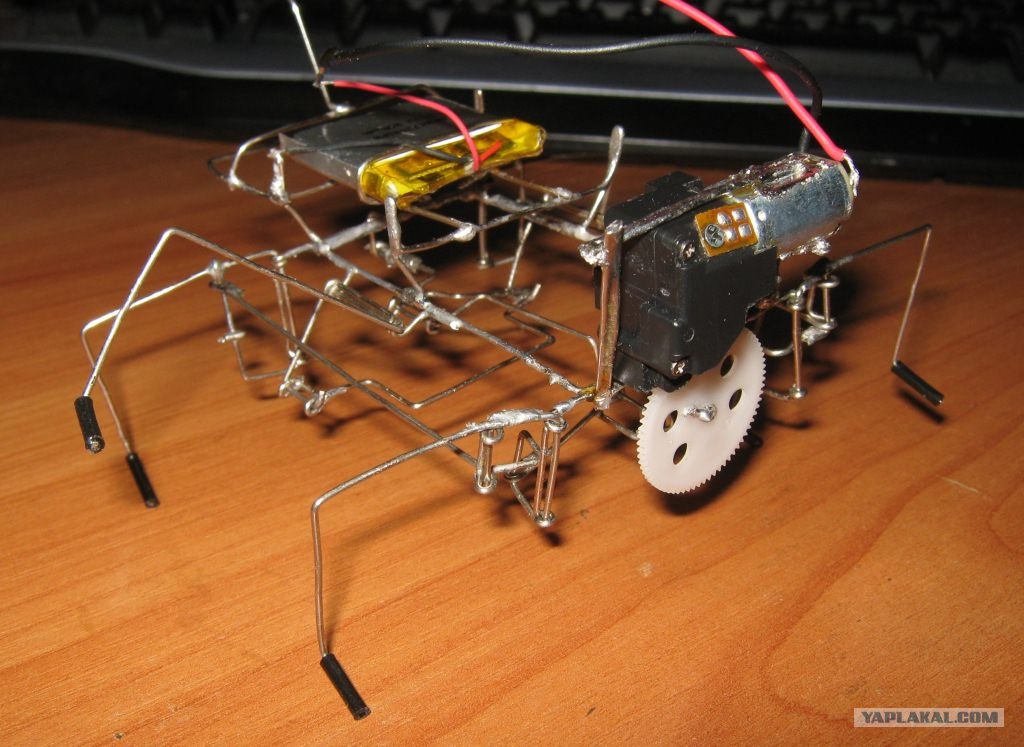 У двигателей постоянного тока есть вращающийся конец оси, поэтому все, что прикреплено к этому концу, будет вращаться при подключении к источнику питания. Эта страница проекта с инструкциями немного затрагивает безопасность разборки игрушек и общие советы.
У двигателей постоянного тока есть вращающийся конец оси, поэтому все, что прикреплено к этому концу, будет вращаться при подключении к источнику питания. Эта страница проекта с инструкциями немного затрагивает безопасность разборки игрушек и общие советы.
Наконец, вот некоторые методы сборки из картона, которые могут оказаться полезными:
© Exploratorium, www.exploratorium.edu
Руководство для домовладельцев по автоматизации и самодельным роботам для повседневной жизни
Руководство для домовладельцев по автоматизации и самодельные роботы для повседневной жизни | BHGRE HomeCityБлагодаря проектам домашней автоматизации и робототехники вы можете сделать свой дом более комфортным и удобным, наслаждаясь творческим и технически подкованным выходом для своей изобретательности.
Домашняя автоматизация имеет множество преимуществ, в том числе:
- Лучшее управление бытовой техникой и освещением
- Повышение безопасности и безопасности за счет автоматизации процессов, о которых легко забыть
- Повышенный комфорт и удобство
- Экономия времени
- Повышение контроля и эффективности
Наличие «умного» дома становится все более популярным. К сожалению, технология умной домашней автоматизации недешева, а роботизированные устройства для дома еще дороже. Вот почему это выгодно делать самому… помимо того, что это еще и веселее!
К сожалению, технология умной домашней автоматизации недешева, а роботизированные устройства для дома еще дороже. Вот почему это выгодно делать самому… помимо того, что это еще и веселее!
Итак, с чего начать? Вот более подробный обзор того, что вам нужно сделать, чтобы заняться собственным проектом автоматизации или робототехники своими руками дома, а затем несколько примеров проектов, с которых можно начать. Вы полный новичок в этой идее? Не волнуйся! Существует довольно много идей, которые вы можете реализовать, не имея предварительных знаний в области робототехники и автоматизации, так что получайте удовольствие!
Основы и требования к проекту робототехники или домашней автоматизации
Итак, вы готовы начать, но с чего? Как создать робота или взломать домашние системы, чтобы автоматизировать их, если у вас нет в этом большого опыта? Вот несколько идей, с которых можно начать.
Знайте свои инструменты и платформы
Во-первых, вам нужно знать инструменты, доступные для этого процесса.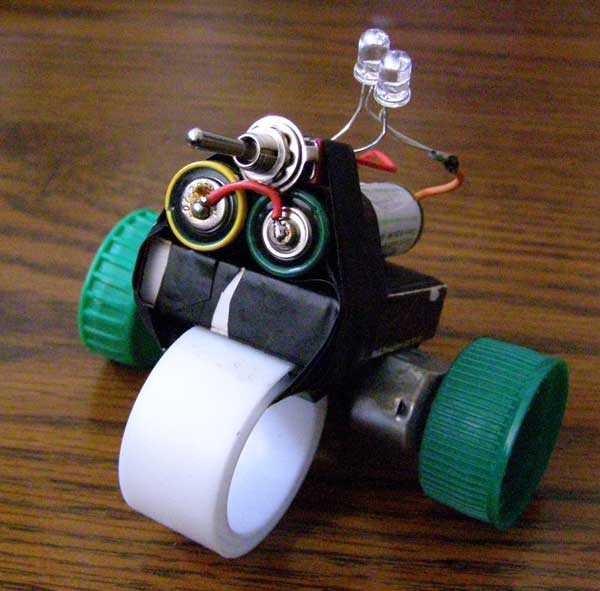 Если вы полный новичок, вам понадобится базовая терминология, прежде чем вы начнете. Рассмотрим следующие термины:
Если вы полный новичок, вам понадобится базовая терминология, прежде чем вы начнете. Рассмотрим следующие термины:
- Датчик — датчик обнаруживает факторы в окружающей среде, чтобы автоматизированная система или робот могли функционировать соответствующим образом. Их можно уподобить замене человеческих чувств.
- Контроллер — Контроллер используется для отправки сигналов устройству автоматизации или роботу. Это может быть как простой выключатель, так и сложный компьютер. Большинство контроллеров представляют собой портативные удаленные устройства. В случае домашней автоматизации контроллер может быть встроен в интерфейс.
- Микроконтроллер — Микроконтроллер представляет собой небольшой компьютер, созданный на одной интегральной схеме, используемый для программирования роботов; Примером этого является микросхема.
- Контроллер сервопривода — Контроллер сервопривода представляет собой центр управления сервосистемой, который включает двигатель, устройство обратной связи и сам контроллер.
 Для самодельных мобильных роботов необходим сервоконтроллер, обеспечивающий правильную реакцию.
Для самодельных мобильных роботов необходим сервоконтроллер, обеспечивающий правильную реакцию. - Печатная плата — Печатная плата позволяет выполнять соединения контроллера или беспроводного приемника с различными компонентами системы.
- Модуль — В домашней автоматизации модуль представляет собой подмножество системы, используемой для управления одним элементом в доме. Хорошим примером является модуль управления термостатом.
- Интерфейс — Интерфейс — это место, где вы взаимодействуете со своим творением. Это приложение на вашем смартфоне, экран на пульте дистанционного управления или программа на вашем компьютере, которую вы используете для управления тем, что вы создали.
Когда вы поймете основные термины, вам нужно будет выбрать платформу. Платформа является центральной частью аппаратного обеспечения, которое позволяет строителю программировать функции робота. Он может быть простым или сложным, в зависимости от конструкции робота.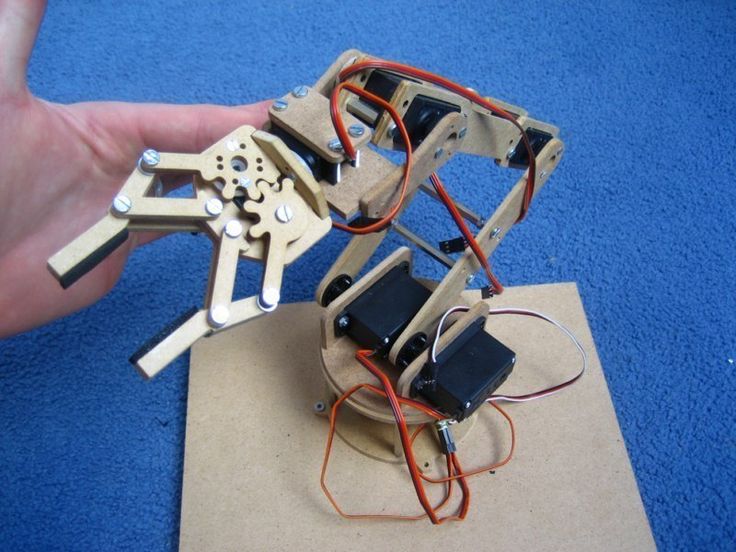 Некоторые популярные платформы для энтузиастов DIY включают:
Некоторые популярные платформы для энтузиастов DIY включают:
- Комплект роботов Pololu 3pi — Комплект роботов Pololu 3pi имеет микроконтроллер ATmega 168, работающий на частоте 20 МГц и запрограммированный на языке C/C++. Он оснащен ЖК-дисплеем 8×2 и может двигаться со скоростью до 1 м/с.
- Raspberry Pi — Этот компьютер размером с кредитную карту представляет собой полный компьютер Linux, который является экономичным, но при этом мощным инструментом программирования. Самодельные хакеры любят его из-за его небольшого размера, но способности обрабатывать больше, чем предлагает базовый микроконтроллер.
- Arduino — Arduino предлагает платы, которые создают простую в использовании платформу робототехники «сделай сам». Эти платы имеют процессоры Atmel/microchip, работающие на «тактовой частоте» по доступной цене. Они принимают входные данные от переключателей и датчиков и посылают сигналы на выход.
 Arduino довольно популярен среди производителей и поэтому широко представлен в онлайн-сообществе. Это делает его отличным выбором для самодельных хаков, потому что большинство проектов были выполнены другими людьми, которые могут дать несколько советов. Он также не требует пайки в большинстве случаев.
Arduino довольно популярен среди производителей и поэтому широко представлен в онлайн-сообществе. Это делает его отличным выбором для самодельных хаков, потому что большинство проектов были выполнены другими людьми, которые могут дать несколько советов. Он также не требует пайки в большинстве случаев. - WiFi-модуль Espressif ESP8266 . Это крошечное устройство изначально было разработано как модуль приемопередатчика WiFi, но его встроенные вычислительные возможности делают его отличной платформой для небольших роботов.
- STM32 Nucleo Board — эта конкретная платформа, совместимая с платами Arduino Uno, имеет в своей основе другое программирование. Это доступно и позволяет быстро пробовать новые идеи.
Есть и другие, но они чаще всего используются для проектов «сделай сам».
Далее вам нужно решить, какую форму подключения вы будете использовать. Будет ли ваш робот или система автоматизации беспроводной или проводной? Вот некоторые соображения:
- Для подключения Ethernet требуются провода, что не идеально для большинства приложений, но может сократить расходы.
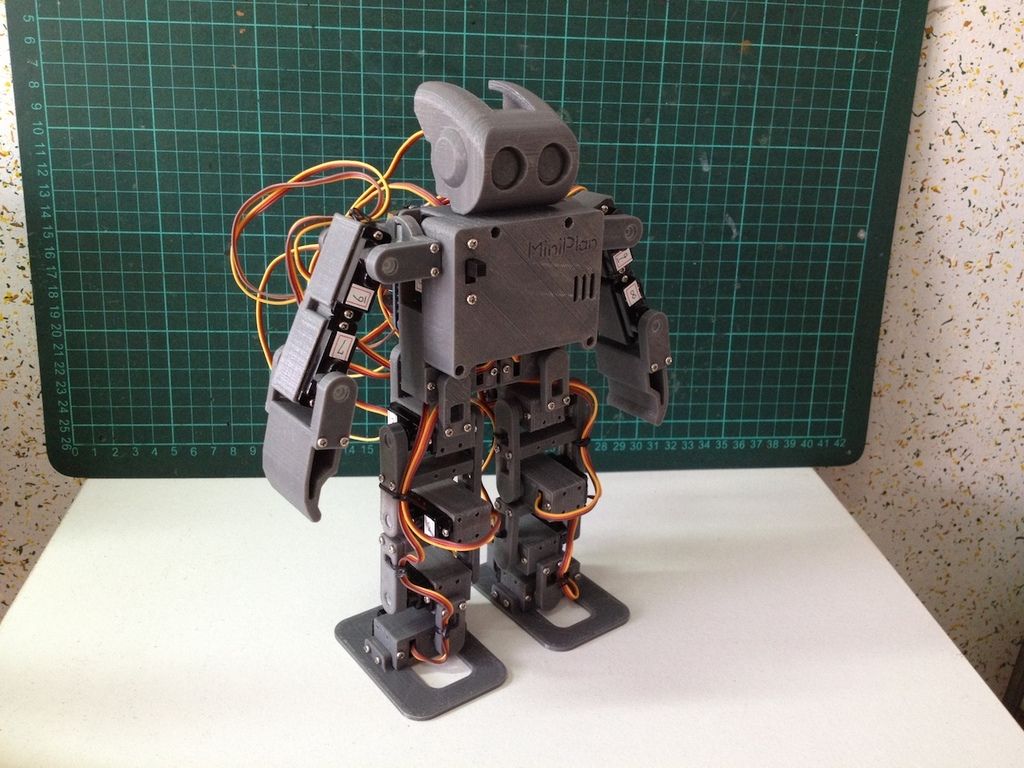
- WiFi лучше всего подходит для интеграции систем в Интернет или внутри Интернета.
- Модули Xbee и RF — отличное решение.
- Подключение Bluetooth также работает хорошо, особенно для домашней автоматизации.
- Убедитесь, что выбранное вами соединение присутствует как на модулях, так и на центральном процессоре.
После выбора подключения вам необходимо выбрать интерфейс. Вот ваши варианты:
- Используйте центральный блок для запуска интерфейса и прямого подключения модулей к нему. Для этого хорошо подходят веб-интерфейсы.
- Используйте интерфейс, в котором данные из модулей настроены на облачный сервис. Это дает свободу управлять вашими системами автоматизации или роботом удаленно. Подумайте о возможности проверить камеры видеонаблюдения во время отпуска на пляже!
- Рассмотрите возможность сочетания обоих вариантов, чтобы удовлетворить ваши потребности и цели.
Далее нужно выбрать мотор, если система будет мобильной, как в случае с роботом. Некоторые из ваших вариантов включают:
Некоторые из ваших вариантов включают:
- Непрерывный постоянный ток — Простое управление и широкая доступность делают их популярными, но они требуют понижения передачи. В постоянном двигателе постоянного тока мощность вызывает непрерывное вращение двигателя.
- Шаговый двигатель — Шаговый двигатель предназначен для вращения всего на несколько градусов при приложении мощности, а затем останавливается. Для создания непрерывного вращения требуется импульсная мощность. Не требует понижения передачи на низких скоростях, но плохо работает при переменных нагрузках или на неровных поверхностях.
- Серводвигатель — Серводвигатель использует постоянный двигатель постоянного тока и добавляет контур обратной связи для обеспечения правильного позиционирования, что обеспечивает лучший угловой контроль. Это популярный и доступный вариант.
Наконец, вы захотите собрать основные инструменты, которые вам понадобятся для проекта. Вот некоторые предметы, которые нужно собрать:
Вот некоторые предметы, которые нужно собрать:
- Паяльник
- Припой
- Отвертки различных размеров
- Плоскогубцы
- Пинцет
- Wire
- Batteries
- Wire strippers and cutters
- Rotary tool
- Drill
- Saw
- Vise
- Breadboard
- Power supply
- Multimeter
- Jumper wires
- Computer or tablet
For more information about Настройка для работы своими руками, посетите:
- Как сделать робота: выбор правильных инструментов
- Журнал PC: Лучшие устройства домашней автоматизации 2017 года
- Электронный дом: 5 способов создать систему домашней автоматизации своими руками менее чем за 50 долларов
- Открытый исходный код: 5 инструментов домашней автоматизации с открытым исходным кодом
- Открытая домашняя автоматизация: создание собственной системы домашней автоматизации — выбор подходящих технологий a План
После того, как у вас есть необходимые инструменты, вы готовы составить план своей сборки.
 Вот несколько советов и приемов, которые помогут вам достичь желаемого с помощью вашего плана.
Вот несколько советов и приемов, которые помогут вам достичь желаемого с помощью вашего плана. - Поставьте цель — Мастерить — это весело, но вы должны убедиться, что у вас есть конечная цель, прежде чем вы начнете. Что вы хотите, чтобы ваша система или ваш робот на самом деле делали? Какую проблему вы хотите, чтобы он решил? Четкая цель поможет вам в дальнейшем планировании.
- Выберите платформу — Мы уже обсудили платформы, но ваш план должен включать логическую платформу и выбор языка программирования для поставленных задач. Установление этого на раннем этапе поможет вам избежать осложнений на этом пути.
- Установите бюджет — Сколько вы хотите потратить? Ответ будет зависеть от вашего семейного бюджета, вашей цели и от того, сможете ли вы купить что-то уже построенное для выполнения той же работы. Кроме того, вам нужно будет решить, является ли процесс частью вашего удовольствия, потому что иногда весело делать что-то, что приносит опыт, даже если вы можете купить это дешевле.
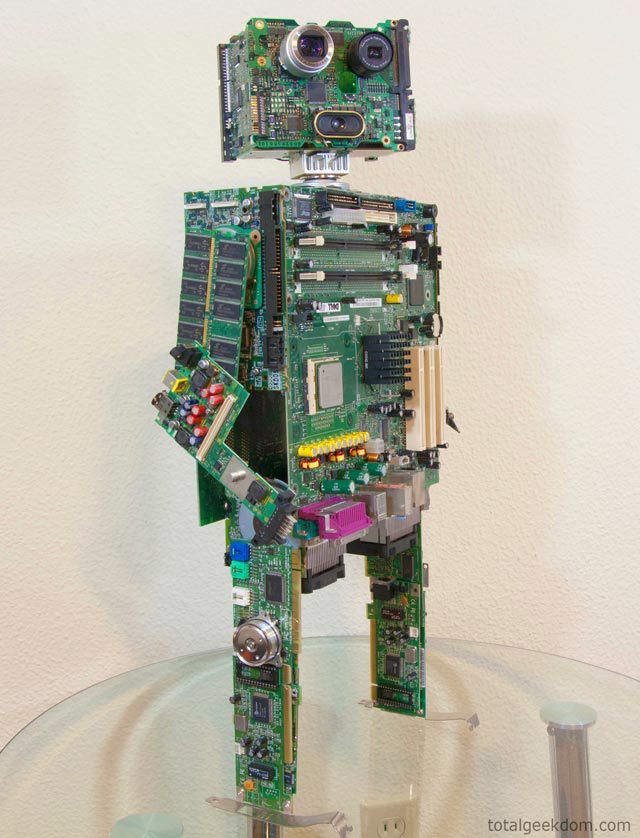
- Подумайте о материалах — Вы можете сделать робота из картонной коробки или систему домашней автоматизации, которая протягивает провода по всему потолку, но это не идеально. Подумайте о материалах, которые вы хотите использовать, и соберите их перед началом проекта.
- План для всех аспектов — Убедитесь, что ваш план охватывает все основы. Например, если вы собираетесь автоматизировать освещение дома, было ли в плане указано, как обращаться с проводкой?
- Найдите шаблон — Любой проект робототехники или домашней автоматизации своими руками, который вы хотели бы реализовать, вероятно, имеет базовый онлайн-шаблон. Найдите один из них и позвольте ему направлять ваше планирование, даже если вы не придерживаетесь его на 100%. Это сэкономит немало времени и нервов!
- Безопасность превыше всего — От ношения защитных очков, когда это необходимо, до безопасного тестирования электрических соединений, установите правила безопасности на протяжении всего процесса сборки и тестирования.
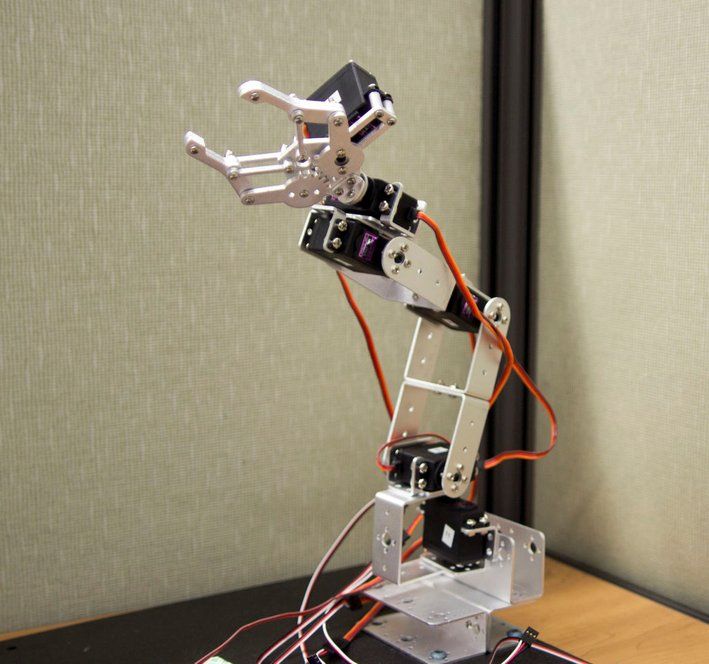
Для получения дополнительной информации о планировании и пошаговых руководств по планированию посетите:
- Popular Mechanics: соберите своего первого робота — пошаговые планы
- Instructables: Your First Robot
- DIY Projects: Make a Robot
- Домашняя автоматизация: как подключить ваш дом к автоматизации
- Умный дом США: спланируйте собственную систему умного дома
Ваш первоначальный план хорош?
После того, как вы получили первоначальный план или нашли его в Интернете, вам нужно присмотреться, чтобы определить, является ли это лучшим способом сделать то, что вам нужно. Вот контрольный список для планирования, который вы можете просмотреть, чтобы определить, правильный ли вы выбрали план.
- Имеет ли план практическую функцию или работу?
- Учитывает ли план перемещения, если это необходимо?
- Учитывает ли план манипуляции с предметами в окружающей среде, если это необходимо?
- Как будет работать окончательный проект?
- Как робот будет ощущать окружающую среду?
- Есть ли в плане четкие инструкции, которым можно легко следовать?
- Учитывает ли план управление завершенным проектом?
- Процесс управления прост и удобен?
- Содержит ли план достаточно деталей, чтобы его было легко выполнять?
- Хорошо ли выглядит дизайн?
- Будет ли конечный продукт безопасным?
- У вас есть подходящие материалы или вы можете их достать?
- Будет ли конечный продукт стоить дороже, чем покупка готовой системы?
- Использует ли проект платформу с открытым исходным кодом или легкодоступную платформу?
- Вы знаете или понимаете эту платформу или можете ее изучить?
- Есть ли в проекте шаги, которые вы не можете выполнить?
Что делать, если ваш дизайн не на должном уровне? Покопайтесь еще немного, так как в Интернете часто есть много версий одного и того же проекта.
 Или используйте свои знания, чтобы настроить дизайн. Вы также можете проконсультироваться на онлайн-форуме, посвященном вашей сборке, или даже в подразделе Reddit, чтобы получить совместную настройку.
Или используйте свои знания, чтобы настроить дизайн. Вы также можете проконсультироваться на онлайн-форуме, посвященном вашей сборке, или даже в подразделе Reddit, чтобы получить совместную настройку. Выведите свою игру на новый уровень
Итак, что вы можете сделать, если вы уже освоили основы программирования, работы в сети, системной автоматизации и создания роботов?
Если вы работаете над домашней автоматизацией, вот несколько стратегий, которые помогут вывести вашу игру на новый уровень:
- Подумайте о том, чтобы заняться проектом, требующим подключения к электрической сети дома.
- Рассмотрите возможность добавления дополнительных устройств в созданную вами систему автоматизации.
- Рассмотрите возможность автоматизации более сложной системы, такой как аудиосистема, спринклерная система или система вентиляции и кондиционирования.
- Рассмотрите возможность использования другой платформы.
- Рассмотрите возможность разработки приложения для работы вашей системы.

Для робототехники вам может понадобиться:
- Рассмотрим проект, требующий от вас дополнительного изучения программирования.
- Подумайте о создании автономного робота.
- Рассмотрите возможность создания робота для новой, более сложной функции.
- Рассмотрите возможность разработки приложения для запуска вашего робота.
- Рассмотрите возможность создания робота, работающего на гидравлике, для вашего дома.
Вот еще несколько идей о продвинутых проектах:
Домашняя автоматизация
- LifeHacker: Создайте систему домашней автоматизации с помощью Raspberry Pi и Arduino 124 41 Инструкции по автоматизации умного дома на Android4. Форумы AV: Расширенный проект домашней автоматизации своими руками
- Взлом своими руками: автоматизация дома через Интернет с помощью Raspberry Pi!
Для робототехники:
- Давайте создадим роботов: как сделать простой автономный автомобиль
- Make: как построить самобалансирующийся автономный бот Arduino
- Открытая культура: научиться программировать бесплатно
- 2 Digital
- 2 Digital
- Media Central: DIY Coding
Список проектов
Итак, теперь, когда у вас есть общее представление о том, что нужно для создания собственного робота или робота для дома, вы готовы приступить к работе? Вот несколько ссылок на проекты, которыми вы можете заняться. Как всегда, не забудьте хорошо оценить план, чтобы убедиться, что он будет делать то, что вы хотите, и иметь задачи, которые вы можете позволить себе решить самостоятельно.
Как всегда, не забудьте хорошо оценить план, чтобы убедиться, что он будет делать то, что вы хотите, и иметь задачи, которые вы можете позволить себе решить самостоятельно.
Взлом существующих систем
У вас уже есть принтер, дверной звонок, телефон, DVD-плеер и т. д.? Почему бы не взломать его, чтобы он стал автоматизированным, или изменить его, чтобы улучшить его общую функцию. Вот несколько идей.
- Instructables: домашняя автоматизация с помощью смартфона
- Lifehacker: превратите старые наушники в Bluetooth-совместимые наушники по дешевке
- Instructables: домашняя автоматизация с помощью Arduino и JavaScript
- Geeky Gadgets: кнопка Amazon Dash взломана для создания Raspberry Бесшумный дверной звонок Пи
- Raspberry Pi: интернет-дверной звонок Raspberry Pi
- Марка: дверной звонок, меняющий цвет радиоуправляемая машинка для управления ею с помощью устройства Android
- Lifehacker: The Enough уже отключает звук вашего телевизора, когда появляются знаменитости с передержкой
- Hackaday: создайте свой собственный клон LoJack
- Мир ПК: встройте компьютер в свой стол
- DIY.
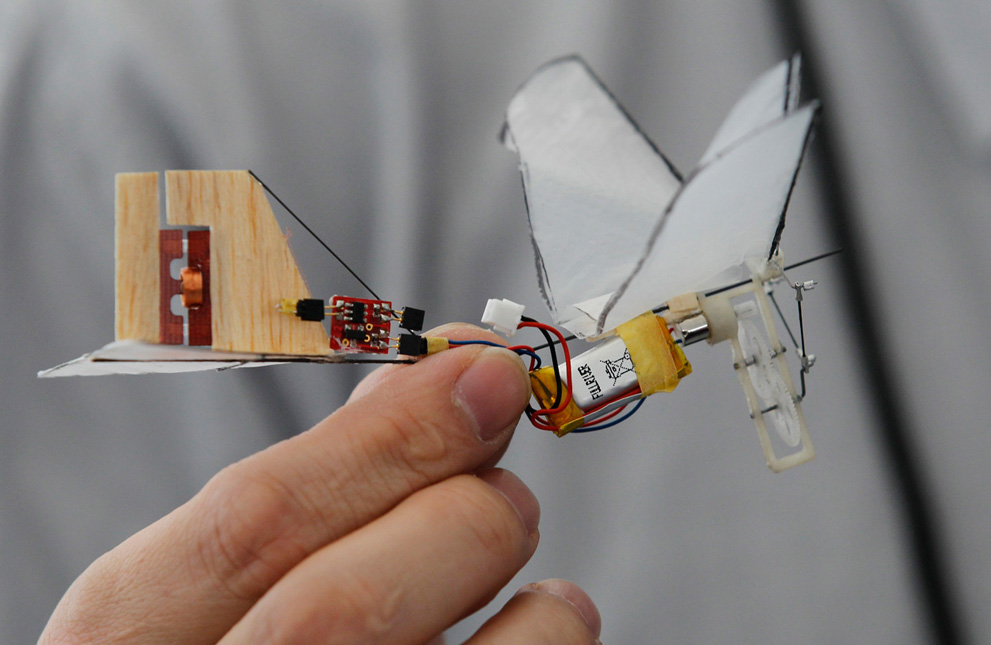 org: взломайте устройство для управления радиоуправляемой машиной
org: взломайте устройство для управления радиоуправляемой машиной - Блог Simply Smart Circuitry: проект «Сделай сам» — проект камеры дверного звонка Pi3
Может быть, вы чувствуете себя авантюрно и хотите начать свой проект робототехники или домашней автоматизации с нуля. Вот несколько идей, которые вы можете попробовать воплотить в жизнь.
- Домашняя автоматизация своими руками: проект новой веб-камеры Raspberry Pi
- Семейная и домашняя безопасность: самодельное оборудование для обеспечения безопасности и защиты дома
- Автоматизированный дом: панель управления домашней автоматизации Arduino своими руками от Мэта Смита
- Инструкции: автоматический ящик для выращивания Arduino своими руками
- Марка: Garduino — Geek Gardening with Arduino
- Материалы: как Как сделать самодельный термостат-гнездо
- Взлом своими руками: машина на дистанционном управлении своими руками — как сделать машинку на радиоуправлении!
Функциональные идеи
Робототехника и автоматизация должны сделать вашу жизнь проще.
 Независимо от того, решают ли они рутинную задачу, которая вам не нравится, или немного упрощают задачу, с помощью робототехники и технологий автоматизации вы можете лучше наслаждаться своим домом. Вот несколько проектов, которые могут сделать именно это:
Независимо от того, решают ли они рутинную задачу, которая вам не нравится, или немного упрощают задачу, с помощью робототехники и технологий автоматизации вы можете лучше наслаждаться своим домом. Вот несколько проектов, которые могут сделать именно это: - Инструкции: DIY Roomba
- Сделать: голосовое управление Roomba
- Интересно, как сделать: как построить робота, который уберет ваш дом Платформа для мобильных камер
- Инструкции: Самодельный PIR-сенсор движения Arduino Освещение и безопасность
- Обзор схемы: Самодельный роботизированный автомобиль Raspberry Pi для видеонаблюдения с веб-управлением
- Практические советы: Самодельное беспроводное индукционное зарядное устройство
- Инструкции: добавьте беспроводную зарядку к вашему смартфону
- Боб Вилла: Гений! Видеомагнитофон превратил автоматическую кормушку для домашних животных
- Самодельные автоматические солнцезащитные жалюзи с серводвигателем за 4 доллара (видео)
- Электронный дом: моторизованные шторы — 6 лучших моторизованных систем обработки окон своими руками
Идеи для развлечений
практичный.
 Некоторые просто для развлечения. Если вы хотите добавить немного веселья в свой дом и получить удовольствие от занятий робототехникой, рассмотрите эти проекты:
Некоторые просто для развлечения. Если вы хотите добавить немного веселья в свой дом и получить удовольствие от занятий робототехникой, рассмотрите эти проекты: - Жизнь робота: RoboStool — мебель по запросу
- Марка: Nvidia Jetson TX1 Cat Spotter and Laser Teaser
- Lifehacker: сборка ретро-игровой консоли «все в одном» внутри старой NES
- Взлом своими руками: робот для распознавания жестов своими руками
- Lifehacker: расширенное руководство по настройке игровой консоли своими руками с помощью Raspberry Pi
- Make: сборка простого робота для коктейлей с помощью Arduino
- Интересная инженерия: сборка шагающего робота своими руками из деталей, разбросанных по всему дому
- Ubergizmo: RoboDS управляет крошечным роботом
- Робот DF: сборка настоящего работающего дроида BB8
- Lifehacker: сборка игровой консоли Raspberry Pi в стиле ретро
Самодельные роботы Рэнди Сарафана — 9781718500235
Варианты доставки 00441 на австралийский адрес
- Когда моя книга будет отправлена с вашего склада?
- Когда прибудет мой заказ?
- Отслеживание доставки
- Международные заказы
- Ограничения на доставку
- Проблемы с доставкой
Варианты доставки: Доставка на австралийский адрес
| Служба | Цена за заказ Австралия широкий |
Срок поставки 1 После отправки |
|---|---|---|
| Экономная доставка (отслеживается) через почту Австралии Заказные товары будут отправлены, как только они поступят на склад. |
7,95 $ | 2-10 дней после поступления всех товаров на склад |
| Экспресс-доставка 2 (отслеживается) через StarTrack Express 3 Заказные товары будут отправлены экспресс-почтой, как только они поступят на склад. Заказ может быть отправлен несколькими партиями, однако с вас будет взиматься только фиксированная плата. |
14,95 долл. США | 1-2 дня после поступления каждого товара на склад |
 Заказ может быть отправлен несколькими партиями, однако с вас будет взиматься только фиксированная плата.
Заказ может быть отправлен несколькими партиями, однако с вас будет взиматься только фиксированная плата.
1 Ожидаемый период доставки после отправки заказа выбранным вами способом доставки.
2 Express доступен не для всех товаров.
3 Обратите внимание, что эта услуга не имеет приоритета над временными рамками статуса «Отправлено», и что временные рамки «Обычно отправляются до» по-прежнему применяются ко всем заказам.
NB Все наши расчеты основаны на рабочих днях и предполагают, что отправка и доставка не осуществляются в праздничные и выходные дни.
Когда моя книга будет отправлена с вашего склада?
После того, как мы получим ваш заказ, мы проверим его, завершим выставление счетов и подготовим ваши товары перед отправкой с нашего склада в Сиднее.
Вы заметите, что на каждой странице продукта на веб-сайте указан предполагаемый диапазон дат доставки для экономичной доставки, а также для экспресс-доставки, если она доступна для этого продукта.
Этот предполагаемый диапазон дат поставки представляет собой комбинацию:
- время отправки вашего заказа с нашего склада и
- время, необходимое для отправки вашего заказа вам.
В дополнение к предполагаемому диапазону дат доставки, на странице продукта вы найдете, сколько времени потребуется для отправки товара.
| Время отправки Время, необходимое для проверки заказа, выставления счета, подготовки вашего товара (ов) и отправки.  |
Пояснение Время отправки будет зависеть от статуса вашего товара(ов) на нашем складе. |
|
|---|---|---|
| Немедленная загрузка |
Немедленная загрузка |
Только цифровые загрузки |
| Отправки на следующий рабочий день |
Обычно отправляется на следующий рабочий день + |
В наличии на нашем складе. |
| Отправка в течение 4-5 рабочих дней |
Обычно отправка в течение 4-5 рабочих дней + |
Заказ размещен у поставщика, ориентировочное время прибытия на склад 4-5 рабочих дней. |
| Отправка в течение 5-14 рабочих дней |
Обычно отправка в течение 5-14 рабочих дней + |
Заказ размещен у поставщика, ориентировочное время прибытия на склад 5-14 рабочих дней. |
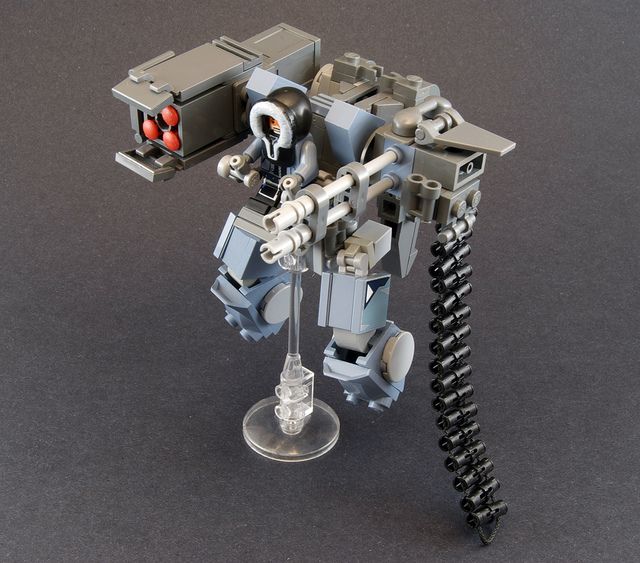
+ Все наши расчеты основаны на рабочих днях и предполагают, что отправка и доставка не осуществляются в праздничные и выходные дни.
Когда прибудет мой заказ?
Расчетная дата доставки — это предполагаемая дата доставки вашего заказа в выбранное вами место доставки.
После отправки заказа вы получите электронное письмо с подтверждением и обновлением статуса.
- Если вы заказываете несколько товаров и не все из них есть на складе, мы сообщим вам ожидаемое время их прибытия.
- Для предметов, которых нет в наличии, мы будем предоставлять текущую предполагаемую отгрузку и сроки доставки.
- Как только ваш заказ будет отправлен с нашего склада в Сиднее, вы получите электронное письмо со статусом «Заказ отправлен». Это будет содержать вашу информацию об отслеживании
Все наши оценки основаны на рабочих днях и предполагают, что отправка и доставка не осуществляются в праздничные и выходные дни.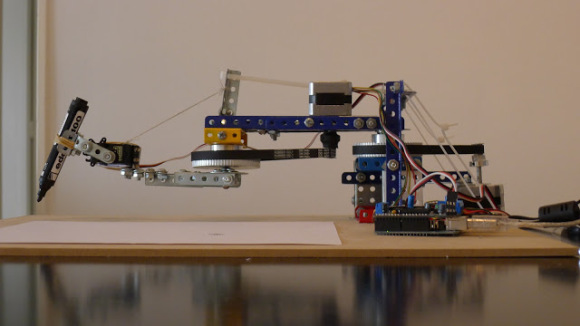
Отслеживание доставки
Экономная доставка: Почта Австралии
Доставка Почтой Австралии можно отслеживать в пути с помощью eParcel. Вы можете отслеживать свою доставку, перейдя на страницу отслеживания AusPost и введя свой номер отслеживания. Электронное письмо с отправленным заказом будет содержать эту информацию для каждой посылки.
- Доставка стандартной почтой Австралии обычно происходит в течение 2-10 рабочих дней с момента отправки. Обратите внимание, что сроки доставки могут варьироваться в зависимости от области доставки, и по разным причинам доставка может занять больше времени, чем первоначально предполагаемые сроки.
- Если вы не получили посылку в установленные сроки, мы советуем вам сначала связаться с местным почтовым отделением, так как посылка может находиться там, ожидая вашего получения.
- Если вы не получили никакой информации после обращения в Почту Австралии, свяжитесь с нами, чтобы подтвердить правильность сведений о доставке, зарегистрированных у нас.
 После этого мы свяжемся с вами и предложим соответствующие действия.
После этого мы свяжемся с вами и предложим соответствующие действия.
Экспресс-доставка через StarTrack Express
Вы можете отслеживать свою доставку, перейдя в StartTrack для отслеживания, используя свой номер накладной. Номер накладной высылается вам по электронной почте вместе со счетом-фактурой во время отгрузки.
- Имейте в виду, что сроки доставки могут варьироваться в зависимости от региона доставки — приблизительное время доставки обычно составляет 1-2 рабочих дня.
- По вопросам доставки вашего заказа обращайтесь в службу поддержки клиентов Star Track по телефону 13 23 45 и укажите указанный выше номер накладной.
- Если вы не получили никакой информации после контакта со Star Track, пожалуйста, свяжитесь с нами, чтобы подтвердить правильность зарегистрированного у нас адреса доставки. После этого мы свяжемся с вами и предложим соответствующие действия.
Международная доставка
Чтобы отслеживать заказы, отправленные DHL, перейдите на страницу отслеживания DHL. Тарифы на международные направления доставки указаны ниже. При международной доставке мы задержим ваш заказ до тех пор, пока не сможем отправить вам все товары сразу.
Тарифы на международные направления доставки указаны ниже. При международной доставке мы задержим ваш заказ до тех пор, пока не сможем отправить вам все товары сразу.
| Вес посылки | Новая Зеландия | Гонконг | США и Канада | Соединенное Королевство |
|---|---|---|---|---|
| До 1 кг | $30 | $35 | 40 долларов | 45 долларов |
| 1,5 кг | $35 | 45 долларов | 50 долларов | 60 $ |
| 2 кг | 40 долларов | 50 долларов | 60 $ | 70 $ |
| 2,5 кг | 45 долларов | 60 $ | 70 $ | 80 $ |
| 3 кг | 50 долларов | 65 $ | $75 | 90 $ |
| 3,5 кг | $55 | $75 | $85 | 100 долларов |
| 4 кг | 60 $ | 80 $ | 95 $ | 105 долларов |
| 4,5 кг | 65 $ | $85 | 100 долларов | 115 долларов |
| 5 кг | 70 $ | 95 $ | 110 $ | 125 $ |
Если вес вашего заказа превышает 1,0 кг (2,2 фунта, что примерно эквивалентно 1 или 2 книгам в мягкой обложке), мы сообщим вам стоимость доставки и запросим ваше одобрение перед отправкой заказа.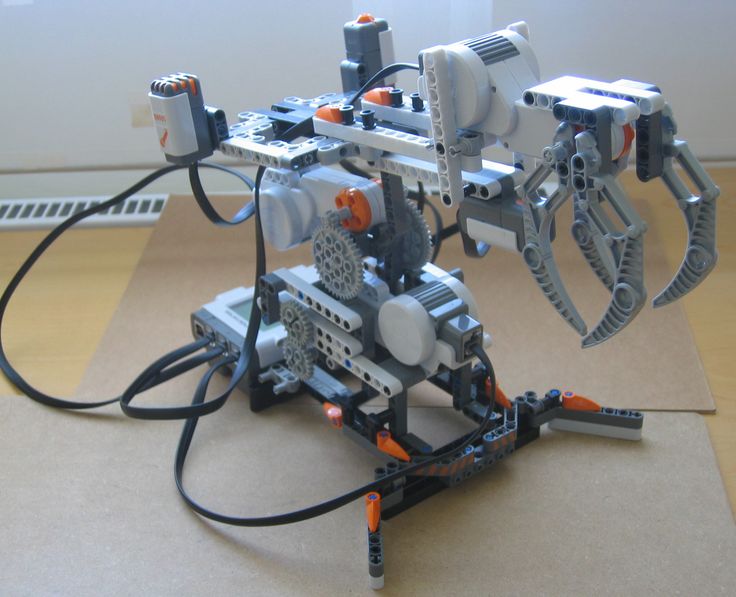
Обратите внимание, что некоторые страны могут время от времени взимать с получателя пошлины за «импорт» посылок. Поскольку эти сборы являются обязанностью получателя, пожалуйста, проверьте таможенную службу в стране назначения, чтобы узнать, применимы ли сборы.
Чтобы отслеживать заказы, отправленные DHL, перейдите на страницу отслеживания DHL. Вы можете проверить, находится ли адрес доставки в удаленном районе, в DHL Remote Area Services.
Повторная доставка: Если ваш заказ возвращен нам компанией доставки из-за неверных или недостаточных сведений о доставке, с вас будет взиматься стоимость повторной доставки заказа. Обратите внимание, что если адрес доставки указан неверно и заказ был отправлен, в зависимости от выбранного варианта доставки мы не сможем изменить адрес доставки до тех пор, пока заказ не будет возвращен.
Проблемы с доставкой
В случае, если курьерская компания не сможет доставить ваш заказ из-за неверной информации об адресе, она вернет заказ обратно в Dymocks Online.
