Как самостоятельно собрать бесколлекторный двигатель. Какие материалы и инструменты потребуются для изготовления. Каковы основные этапы сборки бесколлекторного мотора своими руками. Как правильно намотать обмотки статора и собрать ротор с магнитами. На что обратить внимание при тестировании самодельного бесколлекторного двигателя.
Принцип работы бесколлекторного двигателя
Бесколлекторный двигатель (BLDC) состоит из статора с обмотками и ротора с постоянными магнитами. Его работа основана на взаимодействии магнитных полей статора и ротора:
- Обмотки статора создают вращающееся магнитное поле
- Ротор с магнитами стремится выровняться с полем статора
- Контроллер переключает обмотки, поддерживая вращение
В отличие от коллекторных моторов, в BLDC нет щеток, что повышает КПД и надежность. Управление осуществляется электронным контроллером.
Необходимые материалы и инструменты
Для изготовления бесколлекторного двигателя своими руками потребуются:

- Статор из электротехнической стали
- Медная проволока для обмоток
- Неодимовые магниты для ротора
- Подшипники
- Вал ротора
- Корпус и крепежные детали
- Эпоксидная смола
- Паяльник, припой
- Мультиметр
Также понадобятся базовые слесарные и электромонтажные инструменты. Важно использовать качественные материалы для обеспечения эффективной работы мотора.
Расчет и проектирование двигателя
Перед сборкой необходимо произвести расчеты основных параметров двигателя:
- Число пар полюсов ротора
- Число зубцов статора
- Диаметр и длина статора
- Число витков и сечение провода обмоток
- Размеры магнитов ротора
Расчет параметров зависит от требуемых характеристик мотора — мощности, момента, скорости вращения. Для точных расчетов рекомендуется использовать специализированное программное обеспечение.
Изготовление статора и намотка обмоток
Статор является основой бесколлекторного двигателя. Порядок его изготовления:
- Нарезка пластин электротехнической стали
- Сборка сердечника статора
- Изоляция пазов статора
- Намотка обмоток по рассчитанной схеме
- Пропитка обмоток лаком или смолой
Правильная намотка обмоток критически важна для работы двигателя. Необходимо точно выдерживать число витков и схему соединения фаз.

Сборка ротора с постоянными магнитами
Ротор бесколлекторного двигателя состоит из следующих элементов:
- Вал
- Магнитопроводящий сердечник
- Постоянные магниты
- Бандажная оболочка
Ключевой момент — точное позиционирование и надежное крепление магнитов. Для этого используется эпоксидная смола. После установки магнитов ротор балансируется для устранения биений.
Изготовление корпуса и сборка двигателя
Корпус двигателя должен обеспечивать надежное крепление статора и подшипников ротора. Основные этапы сборки:
- Установка подшипников в корпус
- Монтаж статора в корпус
- Установка ротора
- Монтаж датчиков положения ротора
- Подключение выводов обмоток
При сборке важно обеспечить соосность статора и ротора, а также минимальный воздушный зазор между ними для повышения эффективности двигателя.
Подключение контроллера и тестирование
Для работы бесколлекторного двигателя необходим электронный контроллер (ESC). Порядок подключения и тестирования:
- Соединение выводов обмоток с контроллером
- Подключение датчиков положения ротора
- Настройка параметров контроллера
- Подача питания и проверка вращения
- Измерение рабочих характеристик мотора
При первом запуске следует соблюдать осторожность и начинать с низких оборотов. Необходимо контролировать температуру двигателя и отсутствие посторонних шумов.

Возможные проблемы и их устранение
При самостоятельном изготовлении бесколлекторного двигателя могут возникнуть следующие проблемы:
- Двигатель не запускается или вращается рывками
- Повышенный нагрев обмоток или магнитов
- Сильная вибрация при работе
- Низкая мощность или КПД
Причинами могут быть ошибки в расчетах, некачественная намотка, неправильная сборка. Для устранения проблем необходима тщательная проверка всех этапов изготовления и настройки двигателя.
Заключение
Изготовление бесколлекторного двигателя своими руками — сложная, но интересная задача. Она требует знаний в области электротехники и навыков точной механической обработки. При соблюдении всех рекомендаций можно создать работоспособный двигатель с хорошими характеристиками. Однако для ответственных применений лучше использовать профессионально изготовленные моторы.
Бесколлекторный двигатель своими руками расчет
- Магазины Китая
- RCMOMENT.COM
- Хобби
- Радиотовары
Нестандартное использование бесколлекторного мотора, в любительских целях. Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм. Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8. За подробностями под кат Приветствую! Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта Посылка, упаковка, комплект поставки Внешний вид двигателя GoolRC 3660 Внешний вид ESC контроллера Внешний вид сервомашинки Использование и способ подключения Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами. Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей. Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя. Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений.
 Вот что внутри 3660 серии еще фото Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п. Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
Вот что внутри 3660 серии еще фото Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п. Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок. Общие требования при выборе мотора были следующие: — Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В). — Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.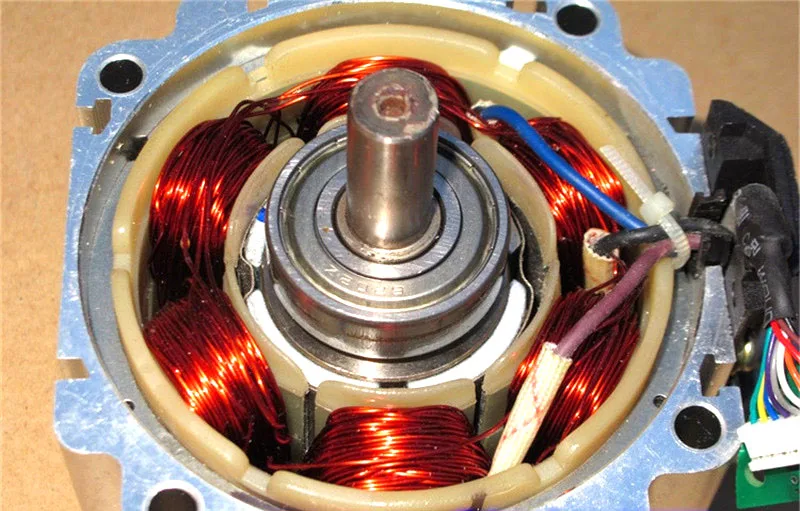
Характеристики комплекта
Наверх ▲
- Характеристики бесколлекторного мотора GoolRC 3660:
- Характеристики ESC контроллера:
- Характеристики сервомашинки:
- Параметры комплекта:
- Состав комплекта:
Модель: GoolRC 3660 Мощность: 1200W Рабочее напряжение: до 13V Предельный ток: 92A Обороты на вольт (RPM/Volt): 3800KV Максимальные обороты: до 50000 Диаметр корпуса: 36mm Длина корпуса: 60mm Длина вала: 17mm Диаметр вала: 5mm Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6) Коннекторы: 4mm позолоченные «бананы» male Защита: от пыли и влаги Модель: GoolRC ESC 60A Продолжительный ток: 60A Пиковый ток: 320A Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd BEC: 5.8V / 3A Коннекторы (Вход): T plug male Коннекторы (вызод.): 4mm позолоченные «бананы» female Размеры: 50 х 35 х 34mm (без учета длины кабелей) Защита: от пыли и влаги Рабочее напряжение: 6.
Посылка, упаковка, комплект поставки
Наверх ▲ Теперь несколько слов о самой посылке. Посылка пришла в виде небольшого почтового пакета с коробкой внутри Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
- Внешний вид двигателя GoolRC 3660
В посылке фирменная коробочка GoolRC Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя. Наверх ▲ БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Начнем с самого главного — с двигателя. Наверх ▲ БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
- Внешний вид ESC контроллера
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner. Маркировка на корпусе С заднего торца видно подшипник Заявлена защита от брызг и влаги Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм Провода имеют термоусадку разного цвета: желтый, оранжевый и синий Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм Габариты корпуса двигателя 36х60 мм Сравнение с коллекторным 775 двигателем Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя Сравнение с другими модельными двигателями Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте) Наверх ▲ ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.
Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя Сравнение с другими модельными двигателями Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте) Наверх ▲ ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.
- Внешний вид сервомашинки
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный))))) На корпусе присутствует маркировка с названием и характеристиками, что очень удобно Охлаждение активное, работает и регулируется автоматически. Для оценки размеров приложил PCB ruller Наверх ▲ В наборе также присутствует сервомашинка GoolRC на 9 кг.
Аналогично перепутать полярность можно если вы очень сильный))))) На корпусе присутствует маркировка с названием и характеристиками, что очень удобно Охлаждение активное, работает и регулируется автоматически. Для оценки размеров приложил PCB ruller Наверх ▲ В наборе также присутствует сервомашинка GoolRC на 9 кг.
- Использование и способ подключения
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни) Макрофото вала сервомашинки Пробуем закрепить крестообразный рычаг для фотографии На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические. Фото платы управления сервой Наверх ▲ Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока.
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений) Привожу чертеж посадочных мест и габаритов двигателя 3660
- Заключение
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6) Скрин из программы для печати на принтере Заодно напечатал и хомут для крепления сверху Мотор 3660 с установленным цанговым патроном типа ER11 Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель. Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема. Соединяем все, по цветам. Источник показывает, что холостой ток контроллера небольшой (0.26А) Теперь сверлильный станок. Собираем все и крепим на стойку Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660 Наверх ▲ Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели. Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время. Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.
Его можно использовать для включения и для регулировки оборотов двигателя При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема. Соединяем все, по цветам. Источник показывает, что холостой ток контроллера небольшой (0.26А) Теперь сверлильный станок. Собираем все и крепим на стойку Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660 Наверх ▲ Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели. Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время. Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.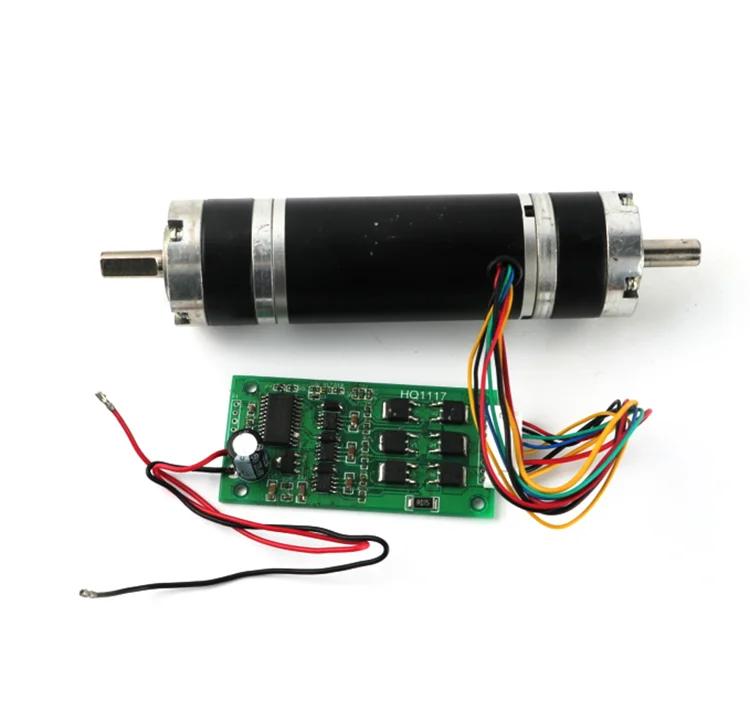 п.).
п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
Планирую купить +63 Добавить в избранное Обзор понравился +92 +156
Бесколлекторный двигатель своими рукам
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом.
К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба
4 группы по 3 зуба
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.
Другими словами, при помощи драйвера получается регулировать момент вращения, который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить скорость вращения ротора электродвигателя.
Бесколлекторный двигатель
Если в коллекторном двигателе всё приходит в действие за счёт механики, то в бесщёточном — чистая электроника. Также позиции некоторых элементов в конструкции меняются местами. В коллекторном двигателе обмотки находились на роторе, а постоянные магниты — на статоре.
В коллекторном двигателе обмотки находились на роторе, а постоянные магниты — на статоре.
У бесколлеторного — постоянные магниты переносятся на ротор, а катушки с обмоткой располагаются на статоре. Также ротор и статор могут менять свои позиции: есть модели двигателей с внешним ротором. Здесь отсутствуют щётки и коллектор, вместо них добавлен микропроцессор (контроллер) и кулер для охлаждения системы.
Микропроцессор контролирует положение ротора, скорость вращения, равномерное распределение напряжения по катушкам обмотки.
Читать еще: Глухой стук и вибрация двигателя
Основные типы бесщёточного двигателя :
- Асинхронный — это двигатель, который преобразовывает электроэнергию переменного тока в механическую. Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks).
- Синхронный — это двигатель переменного тока, у которого частота вращений ротора равна частоте вращений магнитного поля.

Тип двигателя с внешним ротором
Расположение ротора и статора в бесщёточном двигателе DigiPro
- Из-за отсутствия щёток меньше трения.
- Меньше подвержены износу.
- Отсутствие искр и возможного возгорания.
- Упрощенная регулировка крутящего момента в больших пределах.
- Экономия расходуемой энергии.
- У инструментов с реверсом одинаковая мощность в обоих направлениях вращения.
- Быстрый запуск с больших скоростей.
- Могут разгоняться до предельных показателей.
- Некоторые модели при сильной нагрузке оснащены системой защиты двигателя.
- Значительно дороже в цене, чем коллекторные двигатели.
- Техническое обслуживание более узкоспециализированное.
Несомненно бесколлекторные двигатели ориентированы на профессиональные работы с приличной нагрузкой. Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен.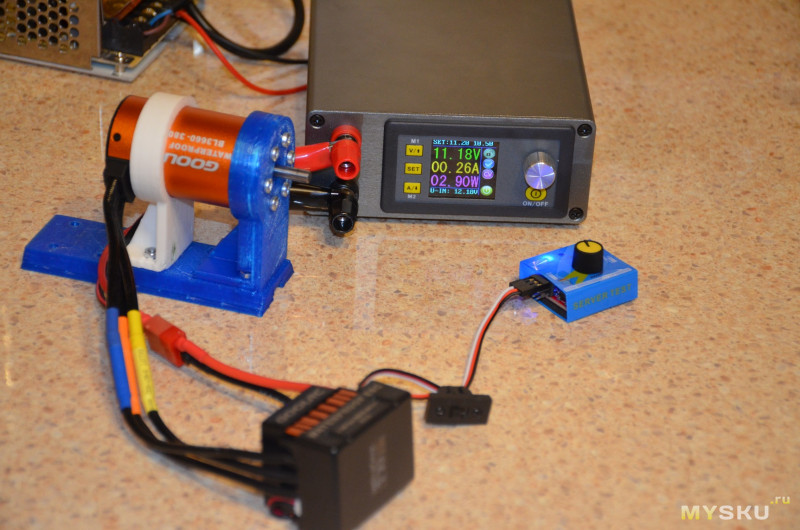 Уже исходя из ответа делать свой выбор.
Уже исходя из ответа делать свой выбор.
Сколько людей — столько и мнений.
Компания Greenworks старается делать качественную продукцию на разных типах двигателя, чтобы каждый мог подобрать себе инструмент по предпочтениям, функционалу и необходимой мощности под конкретные задачи, которые у каждого клиента свои. Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Обычно бесколлекторный двигатель представляет собой синхронный электродвигатель, через который проходит постоянный ток и контролируется через контроллер. У бесколлекторного двигателя коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора
Покупка двигателя может быть непростой задачей, так как на рынке есть огромный выбор двигателей.
Какой двигатель предлагает лучшие характеристики по разумным ценам? Мы составили список бесколлекторных (бесщеточных) двигателей, которые определенно помогут вам выбрать подходящий вариант для ваших задач.
Бесколлекторный двигатель Crazepony EMAX RS2205 2300KVПервый в списке мотор Crazepony. Этот бренд предлагает лучшие услуги для клиентов по доступным ценам. Он считается одним из лучшим, потому что это один из самых продаваемых бесколлекторных двигателей.
По сравнению с другими в списке, это недавно разработанный высококачественный бесщеточный двигатель, который обеспечивает высокую производительность.
Этот двигатель состоит из винтов CW и CCW, адаптеров, системы всасывания воздуха и механизма быстрого охлаждения. Что уменьшает нагрев на 30% и позволяет ему дольше работать.
Читать еще: Что такое двигатель iqdrive
Направление вращения двигателя отмечено направляющей стрелкой, чтобы вы легко определили двигатели CW и CCW (направление вращения). Эти гоночные двигатели идеально подойдут для радиоуправляемого вертолета, квадрокоптера, FPV, мультикоптера, дрона.
Эти гоночные двигатели идеально подойдут для радиоуправляемого вертолета, квадрокоптера, FPV, мультикоптера, дрона.
Характеристики бесколлекторного двигателя Crazepony EMAX RS2205 2300KV
- Провод AWG — 20 AWG
- Диаметр статора 22мм
- Высота статора 5мм
- Диаметр вала 3мм
- Конфигурация 12N14P
- Диаметр мотора 27,9 мм
- Высота мотора 31,7 мм
- Резьба вала адаптера M5
- Входное напряжение 12,6-16,8 В
Плюсы:
- Время работы.
- Высокая эффективность.
- Лучшая скорость разгона.
- Механизм быстрого охлаждения.
Минусы:
HOBBYSKY
2300KV 2204 Бесщеточный двигательСледующий в списке от HOBBYSKY. Этот бренд известен разработкой аппаратных устройств, таких как коптеры, роботы и многое другое. Они продают продукты на международном уровне и стремятся предоставлять все лучшее для своих клиентов.
Это один из лучших бесщеточных моторов, доступных на рынке, потому что у него очень конкурентная цена и он имеет одни из лучших летных характеристик.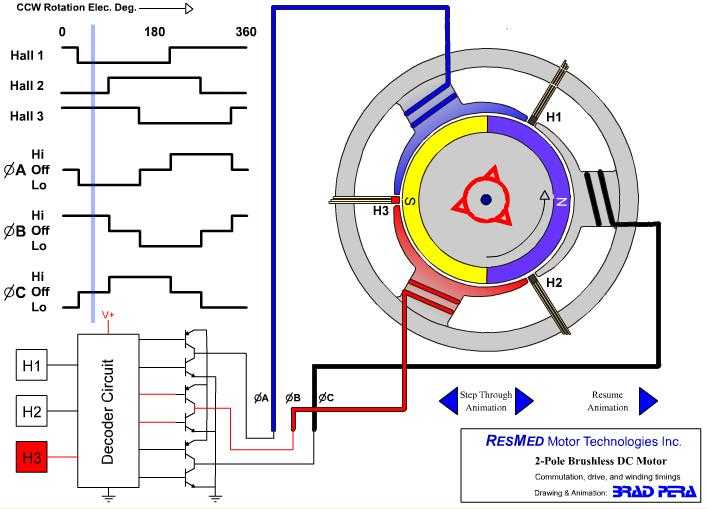
Эти двигатели специально разработаны для квадрокоптеров.
Спецификации:
- 440G максимальной тяги
- Аккумулятор 2 / 3S
- 12N14P рамки
- Пропеллеры 5-6 дюймов
- Длина 32,2 мм
- 9 мм в диаметре
- 3 мм вала
Плюсы:
- Стоимость.
- Хорошие летные характеристики.
- Большая продолжительность полета.
Минусы:
- Возможны минимальные вибрации.
Номер 3 в списке бесщеточный мотор GoolRC. С небольшими затратами вы получаете отличные функции, такие как всасывание воздуха, система охлаждения и высокоскоростные подшипники. Защитный слой бесщеточных двигателей выполнен из термостойкой магнитной стали.
В целом, этот двигатель обеспечивает очень эффективные результаты при установке на квадрокоптеры и вертолеты. Он также имеет сильную защиту от перегрузки и высокий крутящий момент.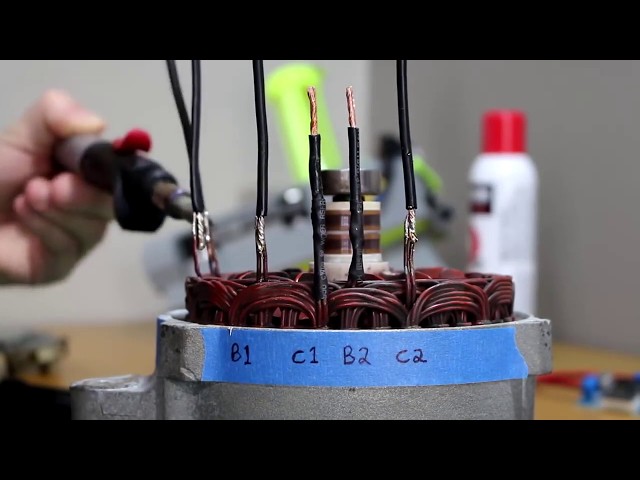 С другой стороны, недостатком этого продукта является то, что он производит некоторый шум из-за помех электромагнитного сигнала.
С другой стороны, недостатком этого продукта является то, что он производит некоторый шум из-за помех электромагнитного сигнала.
95% его функций могут работать без радиаторов, поддерживая следующие технические характеристики:
- 4 полюса, 5200 кВ
- Размеры 36 * 50 мм
- Мощность 900 Вт
- Максимальное напряжение Бесколлекторный двигатель DLFPV 4-х частей DL2205 2300KV
Когда дело доходит до бесщеточных двигателей, DLFPV предлагает одни из лучших бесщеточных двигателей на рынке. Они специализируется на разработке гоночных самолетов FPV RC, квадрокоптеров, камер, мониторов, передатчиков и приемников.
Эти бесщеточные моторы специально разработаны для тех, кто любит создавать интересные проекты. Обеспечивая 100% качество благодаря материалам, используемым при изготовлении бесщеточных двигателей.
Этот комплект оснащен подшипником NMB, системой всасывания воздуха, быстрым охлаждением, держателем винта и крышкой двигателя.
Бесщеточный электродвигатель DLFPV — это продукт среднего класса, имеющий отличные характеристики, включая систему всасывания воздуха и механизм охлаждения. Цена ниже по сравнению с конкурентами. Но единственным недостатком этого продукта является то, что он производит шум и может быть несовместим с другими аппаратными устройствами.
Спецификаций бесщеточных двигателей DLFPV:
- Конфигурация 12N4P
- Вес 28 грамм
- Максимальная мощность 270 Вт
- Внутреннее сопротивление 65 мОм
- Максимальный ток 24А
- Максимальный ток эффективности> 80 %
Плюсы:
- Высокая эффективность.
- Большая продолжительность полета.
Минусы:
- Более слабая конструкция.

- Шум.
Номер 5 в списке от Hobbymate. Название продукта — двигатель hobbymate FPV Quadcopter и идеально подходит для беспилотных летательных аппаратов небольшого размера. Хотя он не является экономичным для многих пользователей, он вошел в список лучших из-за его высокой производительности и надежности.
По сравнению с другими двигателями вы можете легко реализовать его на устройствах без каких-либо помех. И чтобы двигатель работал, вам нужно подать питание 5 В на контроллер полета, используя понижающий регулятор напряжения.
В целом это неплохой двигатель с хорошей системой всасывания воздуха, строгим контролем качества и медной обмоткой. ESC поддерживает сверхскоростное управление с двунаправленным вращением. Двигатель дает стабильные характеристики при различных напряжениях и тепловых условиях.
Модернизированная модель имеет защиту, которая основана на защите от низкого напряжения и перегреве. Производительность этого бесщеточного мотора впечатляет, и он эффективно работает при входной (2 / 4S) или 15 / 25A импульсной мощности.
Производительность этого бесщеточного мотора впечатляет, и он эффективно работает при входной (2 / 4S) или 15 / 25A импульсной мощности.
- Максимальная тяга 440G
- Количество ячеек 2-3S
- Вес 25г
- 12N14P рамки
- 3 мм вал
- Пропеллеры 5-6 дюймов
- Диаметр 9 мм
Особенности мотора QuobbyCopter HobbyMate:
- 2-4S Липо вход
- 15 ампер тока
- 25 ампер взрыв
- 70 мм моторных проводов
- Длина сигнального провода 120мм
- N-канальный МОП-транзистор
Плюсы:
- Высокое время работы.
- Высокая эффективность.
- Минусы:
- Заключение
- Crazepony Motor является нашим главным нашим выбором, потому что он имеет тонкую конструкцию из прочных материалов с высокой надежностью.
- Этот бесколлекторный двигатель оснащен системой быстрого охлаждения для увеличения срока службы и высокой производительности.

Несмотря на то, что он стоит немного дороже, его легкий вес и портативная конструкция позволяют вашему квадрокоптеру, самолету или вертолету снизить вес за счет двигателей. Один недостаток этих двигателей, что их сложно найти в наших магазинах.
Схемные особенности
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
- Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
- Принципиальная схема устройства представлена на рисунке.
Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком. С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.

- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.
Бесколлекторник своими руками
@@Конструктивные особенности CD-ROM движков очень разные. Поэтому в этой статье даются общие рекомендации по переделке таких двигателей с минимальными затратами в 3 фазные авиамодельные двигатели.
@@Требования к CD-ROM движкам (данные приведены для двигателей, которые реально переделывались):
- Число зубцов (полюсов) ротора должно быть равным 9
- Количество устанавливаемых заново магнитов — 12
- Диаметр ротора: 28.5 мм
- Высота ротора: 7.8 мм
- Диаметр оси: 3 мм
- Длина оси: 6.8 мм
- Диаметр статора: 24 мм
- Высота статора: 5.
 2 мм
2 мм - Вес переделанного двигателя — 21 г
- Тип намотки — дельта
- Намотка проводом диаметром — 0,4-0,5 (желательно ПЭТВ)
- Количество витков — 17-20 на зуб
@@Используемые клеи: «111», фиксаторы резьбы (продаются в автомагазинах). @@Используемая эпоксидная смола: любая не российская и не 5-минутка.
Подготовительные работы
@@На внутренней стороне ротора приклеено намагниченное пластмассовое кольцо. Аккуратно удалите его. Это можно сделать следующим образом: согнутый и нагретый гвоздь вводится в пластмассу. Даем ему остыть, и осторожно вытягиваем пластмассовое кольцо
@@Статор отсоединяем от пластины, на которой он крепится (вариантов крепления очень много и поэтому я не привожу технологию — в каждом конкретном случае решайте сами как это сделать). Отсоединения статора, аккуратно удаляем с него намотку, Стараемся не повредить заводскую лакировку.
Перемотка
@@Перемотку статора ведут медным проводом, диаметром 0. 4mm — 0.5mm. На каждый полюс мотаем от 17 до 20 витков.
4mm — 0.5mm. На каждый полюс мотаем от 17 до 20 витков.
@@Чем меньше витков, тем больше обороты, большее количество витков позволяет получить более высокий вращающийся момент. Изоляция провода должна остаться неповрежденной — это критично, иначе ваш двигатель не будет работать.
@@Вы можете выбрать между типом намотки «дельты» и «звезда». С намоткой «звезда» двигатель будет иметь более высокий вращающий момент, меньше оборотов в минуту и будет «есть» меньше. Намотка «дельта» даст «более горячий» двигатель с более высокими оборотами в минуту и большим КПД, но будет иметь больший «аппетит» и будет греться больше. Намотка «звезда» «тяжелее» для работы контроллера.
- Проверка качества
@@Проверка качество намотки производится мультиметром. Провод НЕ ДОЛЖЕН быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым.
Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции). Если вы не уверены, что нет повреждений или «коротыша» — снимайте намотанный провод и мотайте еще раз.
Если вы не уверены, что нет повреждений или «коротыша» — снимайте намотанный провод и мотайте еще раз.
Соедините, закрепите и пропаяйте выводы обмоток. Сопротивление обмоток ~ 0,1-0,14 ом на фазу.
Установка новых магнитов в ротор
@@ОЧЕНЬ ВАЖНО — магниты должны быть установлены с соблюдением полярности — N-S-N-S …, иначе ваш двигатель не будет работать. Хороший способ проверять полярность состоит в том, чтобы разместить 12 магнитов на столе в один ряд, в таком же порядке приклеивать магниты в стакан ротора. Для приклеивания используйте высококачественный клей (не используйте эпоксидную смолу 5-минутку).
@@Добейтесь равномерного размещения магнитов в стакане ротора.
Как можно это сделать: устанавливая магниты в стакан, прокладывайте их тонкими кусочками бумаги одинаковой толщины, если один из зазоров получился больше, то увеличьте толщину бумаги. Расстояние между магнитами должно быть одинаковым.
Не пожалейте времени, чтобы сделать эту работу. После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
Испытание
@@Трения между ротором и магнитами не должно быть. Если движение при проворачивании без значительного усилия и толчков, то можете пробовать запускать собранный двигатель.
- @@ВЫ МОЖЕТЕ изменить направление вращения, меняя 2 из этих 3 контактов между двигателем и контроллером.
- @@Готовые моторы.
- Авторам опубликованных статей предоставляются скидки в нашем магазине
Создание и тестирование бесколлекторного мотора
HOMPAIN 26 декабря 2016 в 12:07 В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания.
Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы. На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники.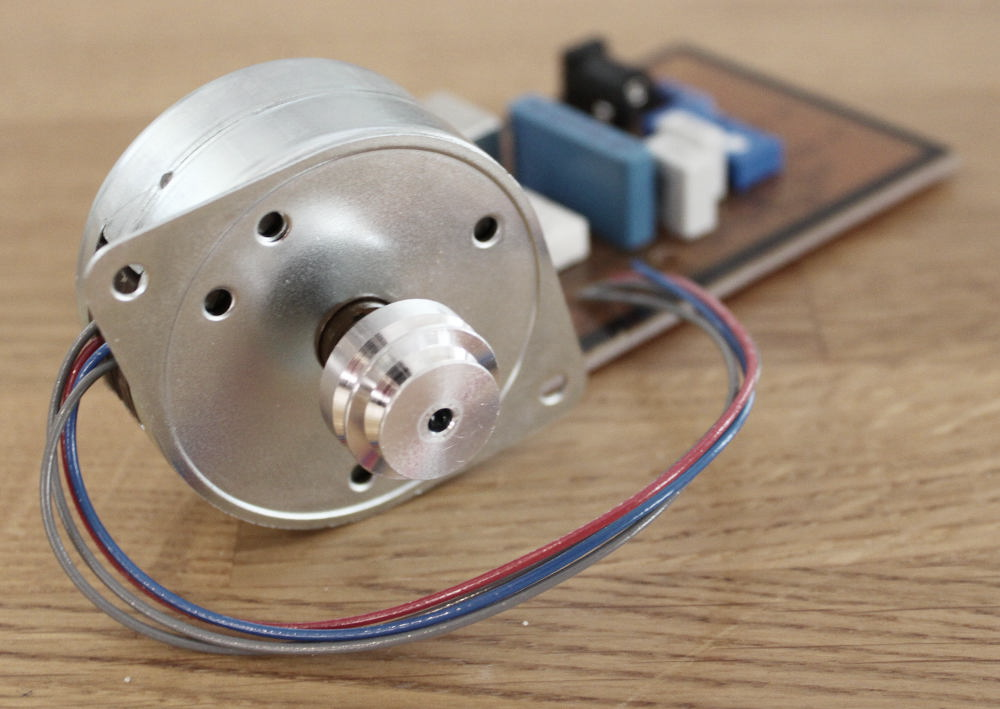 С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей.
Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора.
В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты. Первый такой мотор был напечатан нами 3D принтере как эксперимент.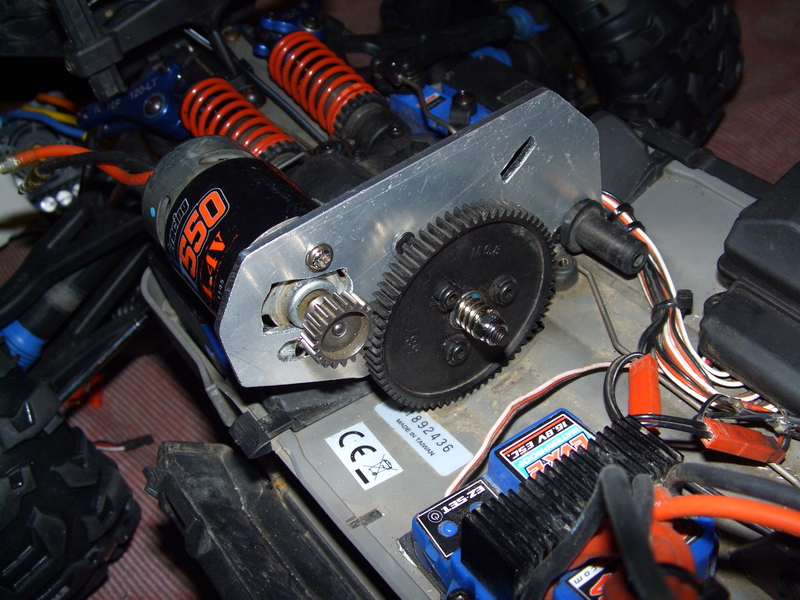
Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность.
Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
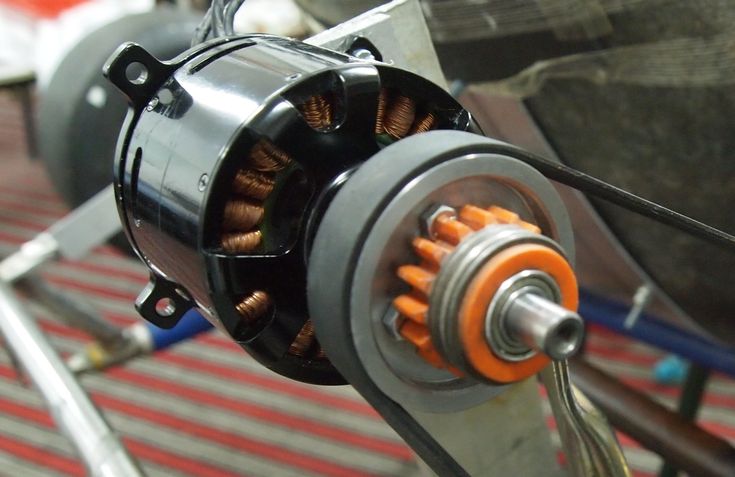
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.
Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.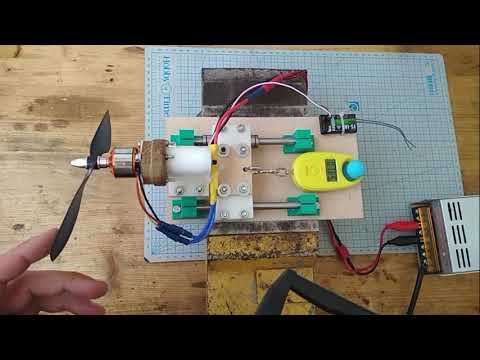 5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.
5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.
Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.
Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд. Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора. Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы. Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы. Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений. В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда: https://youtu.be/rlmqB6aB8cg
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания.
Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
Вдохновили ролики о самодельных моторах. Решился и сделал такой с нуля
Приветствую тебя, уважаемый читатель.
В этой статье я расскажу, как сделал самодельный бесщеточный мотор полностью с нуля в домашних условиях. Кому интересно, усаживайтесь поудобнее и начинаем.
На сборку двигателя своими руками меня подтолкнул не один десяток роликов с зарубежных каналов, там люди собирали электромоторы из того, что было и они хорошо работали и запускались с первого раза.
Источник: https://www.youtube.com/watch?v=RnnnrT4xMUUИсточник: https://www.youtube.com/watch?v=RnnnrT4xMUU
- Вот и мне после просмотра данных роликов захотелось собрать что-то свое, что заработает и это можно будет применить в своих самоделках.

- Нашел я у себя трансформатор от микшера, также заказал 50 штук неодимовых магнитов из Китая и контроллер для управления двигателем.
- Диаметр тора от моего трансформатора равен 62 мм, по ним я сделал чертеж в компасе для ротора.
Чертеж ротора с расположением магнитовЧертеж ротора с расположением магнитов
Из металлического листа вырезал круг диаметром 62 мм, таких же размеров сделал круг из фанеры, толщиной 3 мм.
металлический и фанерный круг D= 62 ммметаллический и фанерный круг D= 62 мм
На металлическом диске сделал разметку для центров магнитов, все работы проводил при помощи циркуля и транспортира.
Из фанеры я вырезал диск диаметром 37,65 мм, он будет держать магниты на одинаковом расстоянии от вала.
Примерил магниты по месту и просверлил центральное отверстие под валПримерил магниты по месту и просверлил центральное отверстие под вал
Далее я из фанеры выпилил кольцо с внутренним диаметром 62 мм, который затем приклеил на ротор с помощью эпоксидной смолы.
(Магниты устанавливал чередуя полюса, для этого взял один из магнитов и проверял, притягивается ли магнит или отталкивается и так расставил все 12 штук поочередно — притягивается, отталкивается).
магниты с Китая, в моем моторе использовал магниты 12 мм на 3 ммМагниты вклеены на эпоксидную смолумагниты с Китая, в моем моторе использовал магниты 12 мм на 3 мм
После высыхания эпоксидки я слегка отшлифовал поверхность, убрав наплывы.
Затем я принялся за изготовление статора из тора трансформатора. Сделал на скорую руку станок из точила и проделал пропилы в торе, постепенно измеряя зазор штангенциркулем, в идеале он должен быть одинаковым.
Зазоры еще не подогнал под один размерЗазоры еще не подогнал под один размер
В итоге получился такой тор, процесс пропиливания пазов занял много времени, около 6 часов за станком.
Зазоры готовы и практически не расходятся по размерамЗазоры готовы и практически не расходятся по размерам
После того, как пропилы готовы, я взял лак для ногтей у своей сестры ( с ее разрешения) и покрасил зазоры, чтобы защитить обмотку от случайного КЗ.
Лак защищает обмотку от соприкосновения с металлом тораЛак защищает обмотку от соприкосновения с металлом тора
Одного лака для защиты недостаточно, я взял обычный лист А4 и нарезал из него полосок, ими обклеил каждый зуб статора.
Заизолировал статор бумагойЗаизолировал статор бумагой
Для того, чтобы ротор вращался, необходимо сделать крепление для подшипника. Я взял алюминиевый диск, сделал в нем отверстия и проточил их напильником, затем примотал его к статору на капроновую нитку и промазал лаком. (Листайте галерею ???? ???? ).
Алюминиевый диск, проделал отверстияпроточил напильником отверстия до овальной формыпримотал диск с статору капроновой нитьюпроклеил лаком капроновую нитьАлюминиевый диск, проделал отверстия
Теперь статор готов для того, чтобы сделать на нем обмотку. В своих закромах нашел проволоку диаметром 0,5 мм, ее и использовал для намотки. Количество витков на каждом зубе вмещал максимально возможно, получилось ровно 50, обмотку мотать нужно в одном направлении и с одинаковым количеством витков.
Пушистый друг пришел на помощьПушистый друг пришел на помощь
Обмотки подключил звездой, то есть соединил концы каждой фазы друг с другом, а оставшиеся три вывода подключаются к контроллеру.
Обмотка двигателя
Когда я полностью сделал обмотку, я приступил к изготовлению ручки из пластиковой трубы, в которой будет находится еще один подшипник, он уменьшит перекосы и придаст жесткость конструкции.
Собрал ручку и установил в нее подшипникСобрал ручку и установил в нее подшипник
Для выставления расстояния между ротором и статором я использовал обычную металлическую трубку, которую стачивал до тех пор, пока не получится минимально возможного зазора. (Чем меньше зазор, тем выше крутящий момент, но ниже обороты).
В ходе испытаний были небольшие доработки и я заменил пластиковую ручку на металлическую с алюминиевым переходником. Также установил трехкулачковый патрон на вал.
практически готовая бормашинкапрактически готовая бормашинка
В итоге создания самодельного двигателя по ходу процесса у меня получилась практически готовая бормашинка, осталось только отцентровать трехкулачковый патрон и сделать защитный кохуж на ротор двигателя.
Вот такой бесщеточный мотор с зажимным патрономВот такой бесщеточный мотор с зажимным патроном
- Также прикладываю видео работы данного мотора.
- Кому понравилась статья про сборку мотора, пишите в х свои доработки, пожелания, а также ставьте лайк и подписывайтесь на канал.
- Благодарю за дочитывание и всем добра.
Управление бесколлекторным двигателем своими руками
Компания Trinamic известна своими интегральными решениям для управления шаговыми двигателями. На этот раз фирма сделала значительный рывок вперед и выпустила микросхему контроллера бесколлекторных двигателей TMCC Она объединяет в одном корпусе процессор Cortex-M4 и драйвер силового трехфазного моста. Благодаря поддержке широкого спектра интерфейсов и датчиков положения TMCC способна стать базовой микросхемой для электроприводов: как для простых, так и для сложных и ответственных приложений. Управление бесколлеторным двигателем — сложная задача. Как известно, в таких двигателях нет коллекторно-щеточного узла.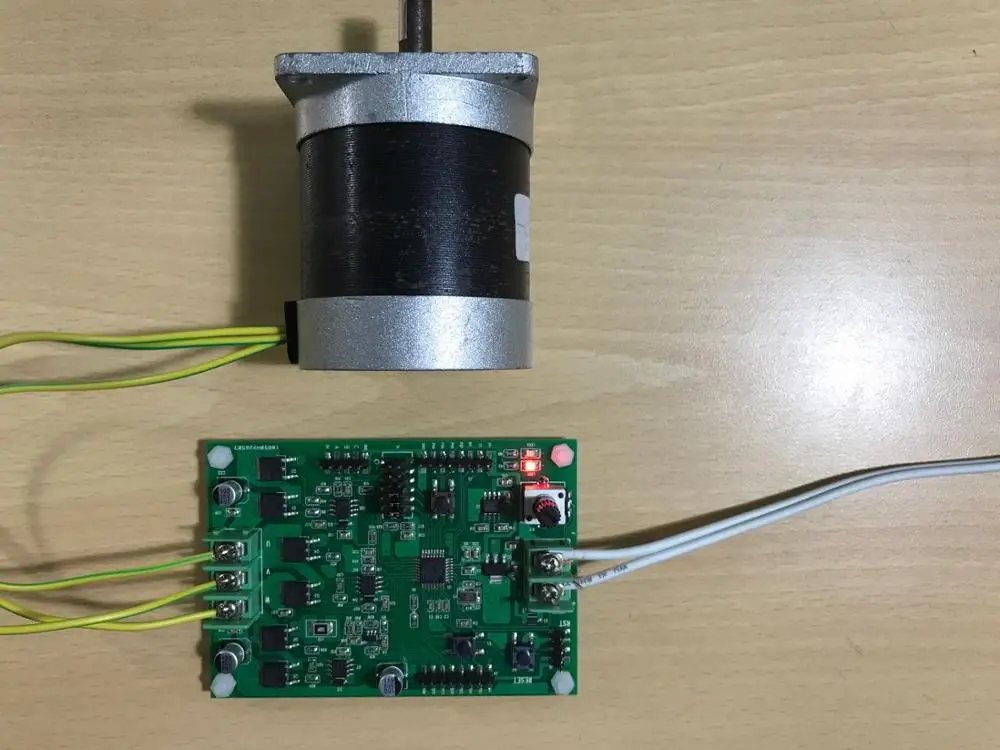
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Прямой эфир
- Схема управления бесколлекторными моторами BLDC, PMSM на микроконтроллере STM32
- Управление бесколлекторным двигателем постоянного тока
- Самодельный бесколлекторный двигатель под управлением Arduino
- Трехфазный бесколлекторный двигатель
- TMCC160 — контроллер и драйвер бесколлекторного двигателя в одном корпусе
- Бесколлекторный двигатель
- Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
- Управление бесколлекторным двигателем постоянного тока
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Управление бесколлекторным двигателем
Прямой эфир
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов — это далеко не полный перечень областей применения бесколлекторных двигателей БД постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки. Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием.
Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см.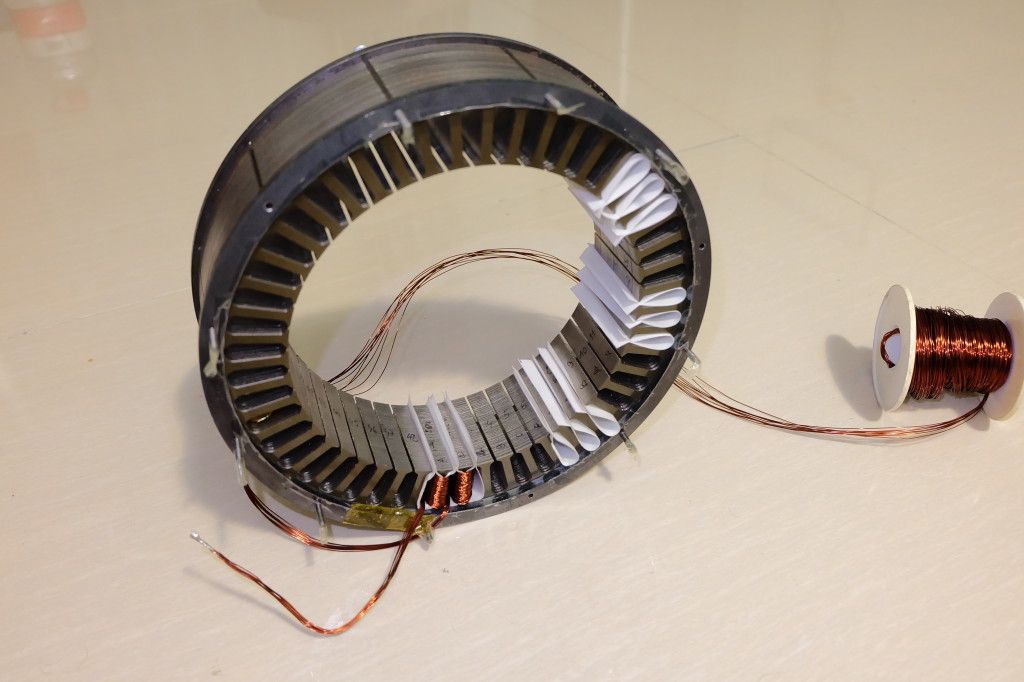 Соответственно, каждая из конструкций имеет определенную сферу применения.
Соответственно, каждая из конструкций имеет определенную сферу применения.
Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.
Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту робототехника, медицинское оборудование, станки ЧПУ и т.
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу.
То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4. Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты. Привод коллекторного типа отличается от БД как конструктивными особенностями см. Рассмотрим конструктивные отличия.
Привод коллекторного типа отличается от БД как конструктивными особенностями см. Рассмотрим конструктивные отличия.
Из рисунка 5 видно, что ротор 1 на рис. Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря. Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле.
Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется. Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению.
То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать.
По этой же причине эти двигатели не могут использоваться как генератор. Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла.
Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции. Чтобы заставить работать приводы данного типа, потребуется специальный контроллер см. Без него запуск невозможен. Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:.
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла.
Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации. Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное см.
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:. В кажущейся простоте управления есть масса сложностей.
Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках.
Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой.
Внешний вид такого многофункционального устройства можно увидеть на рисунке 8. Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД — их относительно высокая стоимость с учетом цены драйвера.
К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка. Синхронный двигатель с постоянным магнитом.. На рисунке 8 изображён контроллер коллекторного двигателя, а подписан как универсальный контроллер бесколлекторного.
Иван Иванович, вы не правы. И мне не понятно ваше возмущение. Но никак не от двух. Если вам не сложно, приведите аргументы, а не беспочвенные утверждения. Если говорите о какой-то ошибке, то, пожалуйста, указывайте в чем конкретно ошибка.
А то не понятно…. Ошибка в том, что 5. А — это бесколлекторный, а 5. В — это коллекторный. У Вас наоборот…. Понравилась статья? Поделиться с друзьями:. Вам также может быть интересно. Комментарии и отзывы Комментарии: 6. Иван Иванович.
Вам также может быть интересно. Комментарии и отзывы Комментарии: 6. Иван Иванович.
Макаров Дмитрий автор. У вас ошибка в 5 рисунке. Согласен с вами. Ошибку исправил. Добавить комментарий Отменить ответ. Политика конфиденциальности Пользовательское соглашение О нас.
Схема управления бесколлекторными моторами BLDC, PMSM на микроконтроллере STM32
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора. Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока БДПТ эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера , за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя. Теперь же разберемся в том, как устроен бесколлекторный двигатель.
На этом и основан принцип работы любого электродвигателя. Теперь же разберемся в том, как устроен бесколлекторный двигатель.
Управление бесколлекторным двигателем по сигналам . Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б).
Управление бесколлекторным двигателем постоянного тока
Когда я начал разрабатывать блок управления бесколлекторным двигателем мотор-колесом , было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями. Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему градусов и почему алгоритм управления именно такой. Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления. Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока. Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ. Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления. Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать. Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока. Синхронная машина Синхронная машина управляется от трехфазной сети переменного тока.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока. Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ. Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления. Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать. Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока. Синхронная машина Синхронная машина управляется от трехфазной сети переменного тока.
Самодельный бесколлекторный двигатель под управлением Arduino
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
И стоит задача его включения.
Трехфазный бесколлекторный двигатель
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией ШИМ. Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока БДПТ , который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений.
TMCC160 — контроллер и драйвер бесколлекторного двигателя в одном корпусе
Хотелось бы сделать более-менее универсальный регулятор, который можно настроить для управления широким разнообразием бесколлекторных двигателей. Поэтому, потребуется интерфейс для настройки регулятора. Обзор паяльной Постоянные магниты, которые в коллекторном моторе установлены на неподвижном статоре, у бесколлекторного мотора расположены вокруг вала, и этот узел называется ротор. Проволочные обмотки бесколлекторного мотора размещены вокруг ротора и имеют несколько различных магнитных полюсов. Датчиковые бесколлекторные моторы имеют на роторе сенсор, который посылает сигналы о положении ротора в процессор электронного регулятора скорости.
драйвер для бесколлекторного двигателя постоянного тока схема — Управление бесколлекторным двигателем — схемотехника.
Бесколлекторный двигатель
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку.
Управление бесколлекторным двигателем постоянного тока
Не ожидал вообще что про меня кто-то помнит Возможно по Arduino буду выкладывать какие-то посты, но тут уже как пойдет с оборудованием, смотря что выделят в универе на это все дело Могу скинуть пару видео сюда по этой тематике, если будет желание посмотреть, пиши. Найдены возможные дубликаты. Все комментарии Автора. А можно ли каким-либо образом присобачить вай-фай модуль к модели? Знаю звучит бредово, но на радиоуправлении нельзя еще и одновременно показывать картинку. Или можно? Очень хочется видеть все в режиме онлайн.
Найдены возможные дубликаты. Все комментарии Автора. А можно ли каким-либо образом присобачить вай-фай модуль к модели? Знаю звучит бредово, но на радиоуправлении нельзя еще и одновременно показывать картинку. Или можно? Очень хочется видеть все в режиме онлайн.
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Простой электродвигатель своими руками из подручных средств
Многие радиолюбители всегда не прочь смастерить какой-нибудь декоративный прибор исключительно в демонстративных целях. Для этого используются простейшие схемы и подручные средства, особенно большим спросом пользуются подвижные механизмы, способные наглядно показать воздействие электрического тока. В качестве примера мы рассмотрим, как сделать простой электродвигатель в домашних условиях.
Что понадобится для простейшего электродвигателя?
Учтите, что изготовить рабочую электрическую машину, предназначенную для совершения какой либо полезной работы от вращения вала в домашних условиях довольно сложно. Поэтому мы рассмотрим простую модель, демонстрирующую принцип работы электрического двигателя. С его помощью вы можете продемонстрировать взаимодействие магнитных полей в обмотке якоря и статоре. Такая модель будет полезной в качестве наглядного пособия для школы или приятного и познавательного времяпрепровождения с детьми.
Для изготовления простейшего самодельного электродвигателя вам понадобится обычная пальчиковая батарейка, кусочек медной проволоки с лаковой изоляцией, кусочек постоянного магнита, по размерам не больше батарейки, пара скрепок. Из инструмента хватит кусачек или пассатижей, кусочка наждачной бумаги или другой абразивный инструмент, скотч.
Процесс изготовления электродвигателя состоит из таких этапов:
- Намотайте на пальчиковую батарейку от 10 до 15 витков медной проволоки – это и будет ротор мотора.
 Можно использовать не только батарейку, но и любое круглое основание.
Можно использовать не только батарейку, но и любое круглое основание. - Снимите намотку с батарейки, постарайтесь не сильно нарушать диаметр витков. Зафиксируйте всю катушку двумя диаметрально противоположными витками, как показано на рисунке ниже. Рис. 1: зафиксируйте обмотку витками
- При помощи мелкого наждака зачистите концы якоря электродвигателя. Ваша задача – удалить слой изоляции, так как через эти концы будет осуществляться токосъем.
- При помощи пассатижей согните две скрепки таким образом, чтобы получились круглые петли посредине скрепки. В качестве основания для перегиба петли можно использовать любой твердый предмет, к примеру, спичку. Рис. 2: согните скрепку
- Зафиксируйте скотчем обе скрепки на выводах пальчиковой батарейки, важно добиться плотного прилегания. Если нужно, намотайте несколько слоев скотча.
- Поместите в петли концы ротора, он же будет выступать и валом электродвигателя. Зачищенные концы провода должны располагаться на скрепках.
 Рис. 3: поместите ротор в петли
Рис. 3: поместите ротор в петли - Зафиксируйте под катушкой на поверхности пальчиковой батарейки постоянный магнит.
Простой электродвигатель готов – достаточно толкнуть пальцем катушку и она начнет вращательное движение, которое будет продолжаться до тех пор, пока вы не остановите вал мотора или не сядет батарейка.
Рис. 4: запустите катушкуЕсли вращение не происходит, проверьте качество токосъема и состояние контактов, насколько свободно ходит вал в направляющих и расстояние от катушки до магнита. Чем меньше расстояние от магнита до катушки, тем лучше магнитное взаимодействие, поэтому улучшить работу электродвигателя можно за счет уменьшения длины стоек.
Одноцилиндровый электродвигатель
Если предыдущий вариант никакой полезной работы не выполнял в силу его конструктивных особенностей, то эта модель будет немного сложнее, зато найдет практическое применение у вас дома. Для изготовления вам понадобится одноразовый шприц на 20мл, медная проволока для намотки катушки (в данном примере используется диаметром 0,45мм), проволока из меди большего диаметра для коленвала и шатуна (2,5 мм), постоянные магниты, деревянные планки для каркаса и конструктивных элементов, источник питания постоянного тока.
Из дополнительных инструментов понадобится клеевой пистолет, ножовка, канцелярский нож, пассатижи.
Процесс изготовления электродвигателя заключается в следующем:
- При помощи ножовки или канцелярского ножа обрежьте шприц, чтобы получить пластиковую трубку.
- Намотайте на пластиковую трубку тонкую медную проволоку и зафиксируйте ее концы клеем, это будет обмотка статора. Рис. 5: намотайте проволоку на шприц
- С толстой проволоки удалите изоляцию при помощи канцелярского ножа. Отрежьте два куска проволоки.
- Согните из этих кусков проволоки коленчатый вал и шатун для электродвигателя, как показано на рисунке ниже. Рис. 6: согните коленвал и шатун
- Наденьте кольцо шатуна на коленчатый вал, чтобы обеспечить его плотную фиксацию, можно надеть кусок изоляции под кольцо. Рис. 7: наденьте шатун на коленвал
- Из деревянных плашек изготовьте две стойки для вала, деревянное основание и ушко для неодимовых магнитов.
- Склейте неодимовые магниты вместе и приклейте к ним ушко при помощи клеевого пистолета.

- Зафиксируйте второе кольцо шатуна в ушке при помощи шплинта из медной проволоки. Рис. 8: зафиксируйте второе кольцо шатуна
- Вставьте вал в деревянные стойки и наденьте втулки для ограничения перемещения, сделайте их из кусочков родной изоляции провода.
- Приклейте статор с обмоткой, стойки с шатуном на деревянное основание, кроме дерева можете использовать и другой диэлектрический материал. Рис. 9: приклейте стойки и статор
- При помощи саморезов с плоской шляпкой зафиксируйте выводы на деревянном основании. Два контакта должны иметь достаточную длину, чтобы касаться вала электродвигателя – один выгнутой части, другой прямой. Рис. 10: точки касания вала
- Наденьте на вал с одной стороны маховик для стабилизации вращения, а с другой крыльчатку для вентилятора.
- Припаяйте один вывод обмотки электродвигателя к контакту колена, а второй к отдельному выводу. Рис. 11: припаяйте выводы обмотки
- Подключите электродвигатель к батарейке при помощи крокодилов.
Одноцилиндровый электродвигатель готов к эксплуатации – достаточно подключить питание к его выводам для работы и прокрутить маховик, если он находится в том положении, с которого сам стартовать не может.
Рис. 12: подключите питаниеЧтобы прекратить вращение вентилятора, отключите электродвигатель посредством снятия крокодила хотя бы с одного из контактов.
Электродвигатель из пробки и спицы
Также представляет собой относительно простой вариант самоделки, для его изготовления вам понадобится пробка от шампанского, медная проволока в изоляции для намотки якоря, вязальная спица, медная проволока для изготовления контактов, изолента, деревянные заготовки, магниты, источник питания. Из инструментов вам пригодятся пассатижи, клеевой пистолет, мелкий натфиль, дрель, канцелярский нож.
Процесс изготовления электродвигателя будет состоять из таких этапов:
- Обрежьте края пробки, чтобы получить две плоских поверхности, на которых будет располагаться провод.

- Просверлите сквозное отверстие в пробке и проденьте в него спицу. С одной стороны намотайте изоленту. Рис. 13: вставьте спицу и намотайте изоленту
- В торце пробки вставьте два отрезка проволоки и приклейте их.
- Намотайте обмотку ротора из тонкой проволоки в одном направлении. Сделайте перемотку якоря изолентой, чтобы витки в электродвигателе не распустились во время работы.
- Зачистите надфилем концы обмотки электродвигателя и выводы на пробке и соедините их.
Для лучшего контакта можно припаять. Выводы следует согнуть так, чтобы они буквально лежали на спице.
Рис. 15: согните выводы- Сделайте деревянное основание, две опоры для вала и две стойки для магнитов. Высверлите в опорах отверстия под спицу.
- Приклейте опоры на основание и вставьте в них ротор электродвигателя. Зафиксируйте подвижный элемент ограничителями, наиболее просто сделать их из изоленты. Рис. 16: установите вал на стойки
- Из двух концов проволоки изготовьте щетки для электродвигателя и зафиксируйте их саморезами на основании.
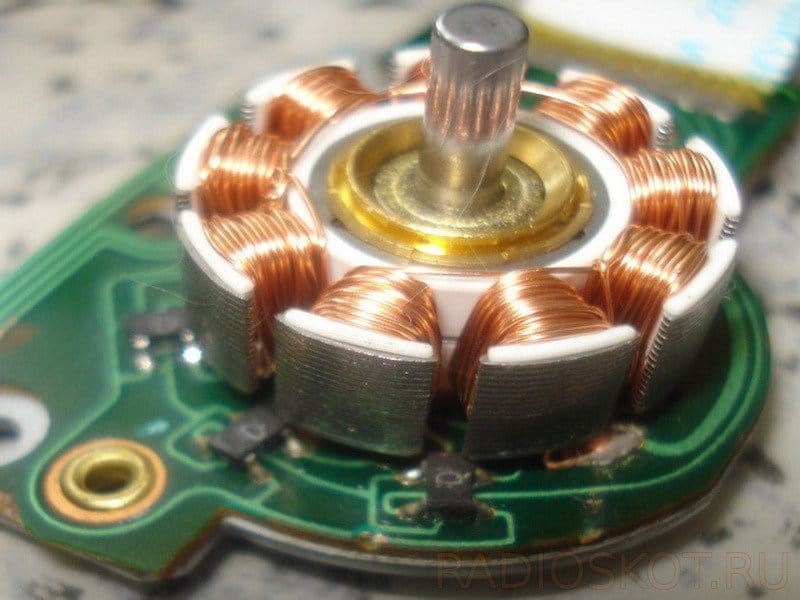 Рис. 17: щетки для электродвигателя
Рис. 17: щетки для электродвигателя - На стойки приклейте два магнита и разместите их с двух сторон от ротора с минимальным зазором.
Наденьте крыльчатку вентилятора на вал и подключите к источнику питания – при протекании электрического тока по катушке произойдет магнитное взаимодействие с полем постоянных магнитов, благодаря чему и возникнет вращательное движение. Простейший электродвигатель готов, запитать его можно и от переменного тока в сети, но вместо батарейки вам придется использовать блок питания.
Видео инструкции в помощь
О покупке мощного бесколлекторного электродвигателя переменного тока для радиоуправляемой модели и подключении контроллера своими руками
Нестандартное использование бесколлекторного мотора, в любительских целях.
Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов).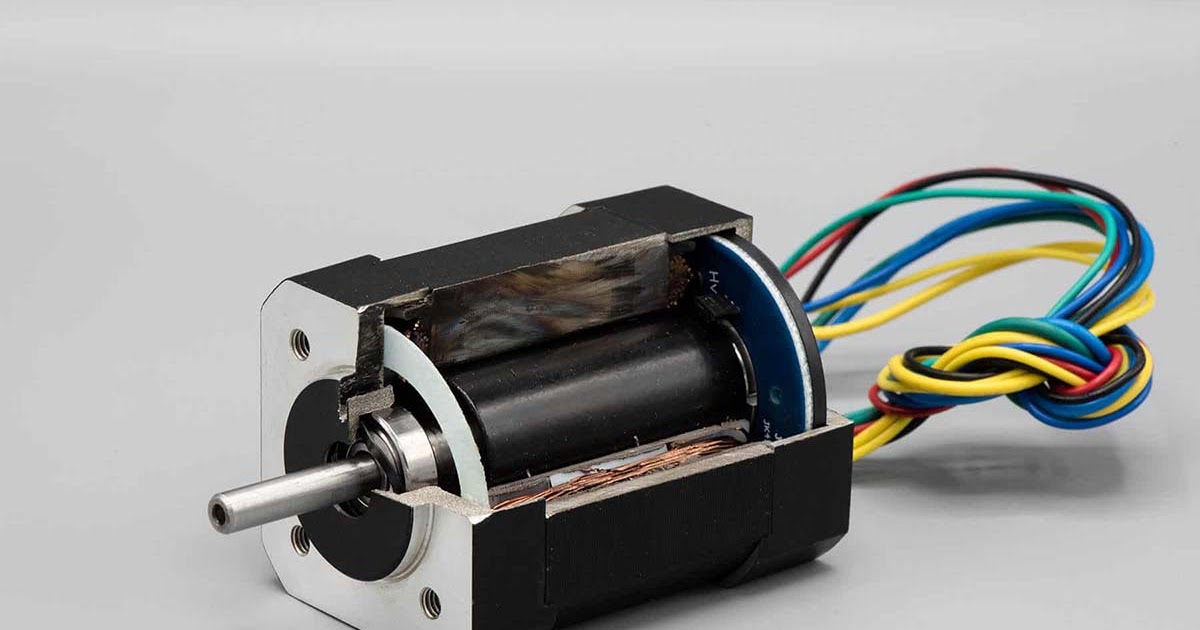 Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.
Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото
Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5. 8V / 3A
8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе
С заднего торца видно подшипник
Заявлена защита от брызг и влаги
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм
Габариты корпуса двигателя 36х60 мм
Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.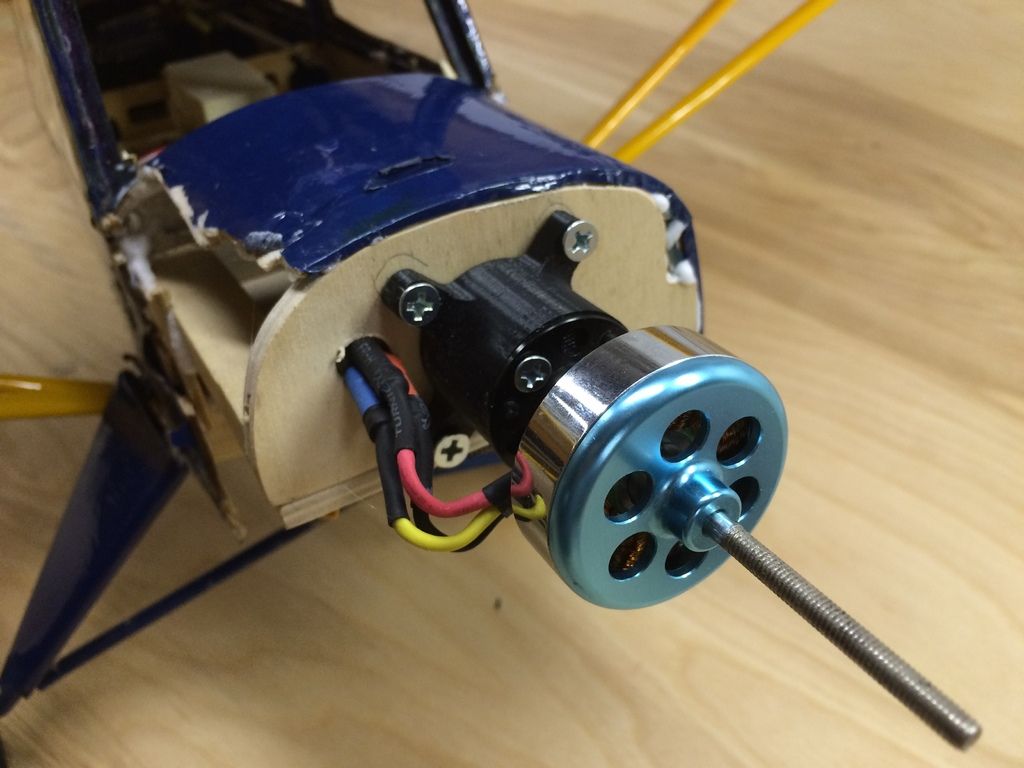
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки
Пробуем закрепить крестообразный рычаг для фотографии
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри.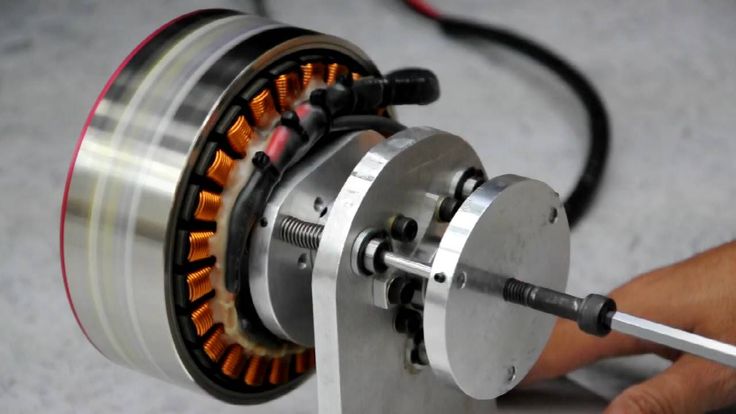 Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические.
Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические.
Фото платы управления сервой
Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока.
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)
Скрин из программы для печати на принтере
Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11
Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.
Соединяем все, по цветам.
Источник показывает, что холостой ток контроллера небольшой (0.26А)
Теперь сверлильный станок.
Собираем все и крепим на стойку
Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат
Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
Дрон своими руками: Урок 3. Силовая установка.
Содержание
- Дрон своими руками: Урок 1. Терминология.
- Дрон своими руками: Урок 2. Рамы.
- Дрон своими руками: Урок 3. Силовая установка.
- Дрон своими руками: Урок 4. Полётный контроллер.
- Дрон своими руками: Урок 5. Сборка.
- Дрон своими руками: Урок 6. Проверка работоспособности.
- Дрон своими руками: Урок 7.
FPV и расстояние удаления.
- Дрон своими руками: Урок 8. Самолёты.
Введение
Теперь, когда вы выбрали или построили раму, следующим шагом будет выбор правильной силовой установки. Так как большинство существующих дронов являются электрическими, мы сосредоточимся на создании исключительно электрической тяги посредством бесколлекторных моторов постоянного тока. В состав силовой установки входят моторы, несущие винты (пропеллеры, сокр. пропы), ESC и аккумуляторная батарея.
1. Мотор
От того какие моторы вы будете использовать в своей сборке, будет зависеть, какую максимальную нагрузку сможет поднять дрон, а также сколько времени он сможет находиться в полёте. Силовая установка должна обязательно состоять из моторов одной марки и модели, такой подход обеспечит ей сбалансированную работу. При этом стоит отметь, что даже абсолютно одинаковые (Бренд/Модель) моторы могут иметь незначительную разницу в скорости, которую в последующем выравнивает полётный контроллер.
Brushed vs Brushless
В коллекторных (Brushed) моторах ротор с обмоткой вращается внутри статора на котором магниты зафиксированы жёстко. В бесколлекторных (Brushless) моторах всё на оборот; обмотка крепится жёстко к внутренней части статора, а магниты установлены на валу и вращаются. В большинстве случаев вы будете рассматривать только бесколлекторные моторы (БК) постоянного тока. Моторы такого типа широко используются в индустрии радиолюбителей при сборке различных продуктов, начиная от вертолётов и самолётов и заканчивая системами привода в автомобилях и катерах.
Бесколлекторные моторы типа «Pancake» имеют больший диаметр, они более плоские и как правило имеют высокий крутящий момент и более низкое значение KV (детали ниже). В БПЛА небольших размеров (обычно размером с ладонь) чаще всего используют маленькие коллекторные моторы из-за более низкой цены и простого двухпроводного контроллера. Несмотря на то, что бесколлекторные моторы могут быть разных размеров и иметь разные характеристики, выбор меньшего размера совсем не означает, что будет дешевле.

Inrunner vs Outrunner
Существует несколько типов бесколлекторных моторов постоянного тока:
- Inrunner – внутренний ротор. Обмотка зафиксирована на статоре, магниты установлены на валу ротора, который вращается (как правило используются на радиоуправляемых лодках, вертолётах и автомобилях из-за высокого KV).
- Outrunner – наружный ротор. Магниты зафиксированы на статоре, который вращается вокруг неподвижной обмотки. Нижняя часть мотора зафиксирована. (как правило, у моторов такого типа больше крутящего момента).
- Hybrid Outrunner – технически это «Outrunner», но реализованный в корпусе «Inrunner». Такой подход позволил объединить в одном типе крутящий момент «Outrunner» и отсутствие внешних вращающихся элементов как у моторов типа «Inrunner».
KV
Рейтинг KV – макс. число оборотов, которое может развить мотор без потери в мощности при заданном напряжении.
Для большинства многороторных БЛА актуально низкое значение KV (например, от 500 до 1000), поскольку это способствует обеспечению стабильности. В то время как для акробатического полёта будет актуальным значение KV между 1000 и 1500, в тандеме с несущими винтами (пропеллерами) меньшего диаметра. Допустим, значение KV для конкретного мотора составляет 650 об/вольт, то при напряжении в 11.1В мотор будет вращаться со скоростью: 11.1 × 650 = 7215 об/мин, а если вы будете использовать мотор при более низком напряжении (скажем, 7.4В), то частота вращения составит: 7.4 × 650 = 4810 об/мин. При этом важно отметить, что использование низкого напряжения, как правило означает, что потребление тока будет выше (Мощность = Ток × Напряжение).
Тяга
Некоторые производители бесколлекторных моторов могут указывать в спецификации информацию о максимально возможной тяге (Thrust) создаваемой мотором в купе с рекомендуемым несущим винтом. Единицей измерения тяги, как правило, являются килограмм (Кг/Kg), фунт (Lbs) или Ньютон (N).
Например, если вы строите квадрокоптер и вам известно, значение тяги отдельно взятого мотора = до 0.5кг в купе с 11-дюймовым несущим винтом, то на выходе четыре таких мотора смогут поднять на максимальной тяге: 0.5кг × 4 = 2кг. Соответственно, если общий вес вашего квадрокоптера составляет чуть менее 2кг, то c такой силовой установкой он будет взлетать только на максимальных оборотах (макс. тяге). В данном случае будет актуальным, либо выбрать более мощную связку «мотор + несущий винт», которые позволят обеспечить большую тягу, либо уменьшить общую массу беспилотника. При макс. тяге силовой установки = 2кг, вес дрона должен составлять не более половины этого значения (1кг, включая вес самих моторов). Аналогичный расчёт можно сделать для любой конфигурации. Предположим, что вес гексакоптера (включая раму, моторы, электронику, аксессуары и т.д.) составляет — 2.5кг. Значит каждый двигатель для такой сборки должен обеспечивать (2.5кг ÷ 6 моторов) × 2 = 0.83кг тяги (или более). Теперь вы знаете как рассчитать оптимальную тягу моторов исходя из общего веса, но прежде чем принимать решение, предлагаем ознакомиться с разделами ниже.

Дополнительные соображения
- Разъёмы: у коллекторных моторов постоянного тока доступно два разъёма «+» и «-». Смена проводов местами меняет направление вращения мотора.
- Разъёмы: бесколлекторные моторы постоянного тока имеют три разъёма. Чтобы узнать как их подключить, а также как изменить направление вращения, обратитесь к разделу «ESC» ниже.
- Обмотки: обмотки влияют на KV моторов. Если вам необходимо наиболее низкое значение KV, но при этом в приоритете крутящий момент, будет лучшим обратить своё внимание на бесколлекторные моторы постоянного тока типа «Pancake».
- Монтаж: у большинства производителей есть общая схема монтажа для БК моторов постоянного тока, которая позволяет компаниям, производящим рамы не прибегать к изготовлению так называемых адаптеров. Шаблон как правило метрический, с двумя отверстиями разнесёнными на 16мм друг от друга, и ещё двумя отверстиями, разнесёнными на 19мм (под углом 90° к первому).

- Резьба: монтажная резьба, используемая для крепления бесколлекторного мотора к раме, может варьироваться. Обычные метрические размеры винтов М1, М2 и М3, имперские размеры могут быть 2-56 и 4-40.
2. Несущие винты (Пропеллеры)
Несущие винты (пропеллеры, сокр. пропы) для многороторных БЛА берут своё начало от винтов радиоуправляемых самолётов. Многие спросят: почему бы не использовать лопасти вертолёта? Несмотря на то, что это уже было сделано, представьте себе размеры гексакоптера с лопастями от вертолёта. Также стоит отметить, что вертолётная система требует изменения шага лопастей, а это существенно усложняет конструкцию.
Вы также можете спросить, почему бы не использовать турбореактивный двигатель, турбовентиляторный двигатель, турбовинтовой двигатель и т.д? Безусловно они невероятно хороши для обеспечения большой тяги, но при этом требуют большое количество энергии. Если первостепенной задачей беспилотника является очень быстрое перемещение, а не зависание в ограниченном пространстве, один из выше перечисленных двигателей может быть хорошим вариантом.
Лопасти и диаметр
Несущие винты большинства мультироторных БЛА имеют две, либо три лопасти. Наибольшее применение получили винты с двумя лопастями. Не думайте, что добавление большего количества лопастей автоматически приведёт к увеличению тяги; каждая лопасть работает в потоке, возмущенном предыдущей лопастью, снижая КПД пропеллера. Несущий винт малого диаметра имеет меньшую инерцию и следовательно его легче ускорять и замедлять, что актуально при акробатическом полёте.
Шаг/Угол Атаки/Эффективность/Тяга
Тяга, создаваемая несущим винтом, зависит от плотности воздуха, числа оборотов винта, его диаметра, формы и площади лопастей, а также от его шага. Эффективность винта связана с углом атаки, который определяется как шаг лопасти минус угол спирали (угол между результирующей относительной скоростью и направлением вращения лопасти). Сама эффективность — это отношение выходной мощности к входной. Большинство хорошо спроектированных винтов имеют КПД более 80%.
На угол атаки влияет относительная скорость, поэтому пропеллер будет иметь разную эффективность при разных скоростях мотора. На эффективность также сильно влияет передний край лопасти несущего винта, и очень важно, чтобы он был максимально гладким. Несмотря на то, что конструкция с переменным шагом была бы наилучшей, дополнительная сложность, необходимая по сравнению с присущей многороторной простотой, означает, что пропеллер с переменным шагом почти никогда не используется.
Вращение
Несущие винты рассчитаны на вращение по часовой стрелке (CW), либо против часовой стрелки (CCW). На направление вращения указывает наклон лопасти (смотреть на пропеллер с торца). Если правая кромка лопасти выше — CCW, если левая кромка — CW. Если конструкция вашего беспилотника подразумевает перевёрнутое расположение моторов (как в случае с конфигурациями Vtail, Y6, X8) обязательно измените направление вращения несущих винтов, чтобы тяга была направлена вниз.
Лицевая сторона несущего винта всегда должна быть обращена к небу. Документация которая идёт с контроллером полёта как правило содержит информацию о направлении вращения каждого винта, для каждой поддерживаемой контроллером многомоторной конфигурации.
Материалы исполнения
Материал(ы), используемые для изготовления несущих винтов (пропеллеров), могут оказывать умеренное влияние на лётные характеристики, но безопасность должна быть главным приоритетом, особенно, если вы новичок и не опытны.
- Пластмасса (ABS/Нейлон и т.д.) — является самым популярным выбором, когда речь заходит о многомоторных БЛА. Во многом это связано с низкой стоимостью, достойными лётными характеристиками и показательной долговечностью. Как правило в случае краша, по крайней мере, один пропеллер оказывается сломанным, и пока вы осваиваете дрон и учитесь летать, у вас всегда будет много сломанных пропов. Жёсткость и ударопрочность пластикового винта может быть улучшена посредством усиления углеродным волокном (карбон), такой подход макс.
результативен и не так дорог по сравнению с винтом полноценно исполненным и карбона.
- Фиброармированный полимер (углеродное волокно, нейлон усиленный карбоном и т.д.) — является «передовой» технологией во многих отношениях. Детали из углеродного волокна всё ещё не очень просты в изготовлении, и поэтому вы платите за них больше, чем за обычный пластиковый винт с аналогичными параметрами. Пропеллер изготовленный из углеродного волокна сложнее сломать или согнуть, и, следовательно, при краше, он нанесёт больший ущерб всему, с чем соприкоснётся. Одновременно с этим, карбоновые винты, как правило, хорошо сделаны, более жёсткие (обеспечивают минимальные потери в эффективности), редко требуют балансировки и имеют более лёгкий вес по сравнению с любыми другими материалами исполнения. Такие винты рекомендуется рассматривать только после того, как уровень пилотирования пользователя станет комфортным.
- Дерево — редко используемый материал для производства несущих винтов многороторных БЛА, поскольку для их изготовления требуется механическая обработка, которая в последствии делает деревянные пропеллеры дороже пластиковых.
При этом дерево вполне прочное и никогда не гнётся. Отметим, что деревянные пропеллеры всё ещё применяют на радиоуправляемых самолётах.
Складные
Складные пропы имеют центральную часть, которая соединяется с двумя поворотными лопастями. Когда центр (который соединен с выходным валом мотора) вращается, центробежные силы действуют на лопасти, выталкивая их наружу и по существу делая пропеллер «жёстким», с тем же эффектом, что и классический не складываемый винт. Из-за низкого спроса и большого количества требуемых деталей, складные пропеллеры встречаются реже. Основное преимущество складных пропов это компактность, а в сочетании со складной рамой, транспортировочные размеры дрона могут быть значительно меньше полётных. Сопутствующим преимуществом складного механизма является отсутствие необходимости, при краше, менять винт целиком, достаточно будет заменить только повреждённую лопасть.
Установка
Как и БЛА, несущие винты могут имеют широкий диапазон размеров.
Таким образом, в этой отрасли существует целый ряд «стандартных» диаметров вала двигателя. В связи с чем несущие винты часто поставляются с небольшим набором переходных колец (выглядят как шайбы с отверстиями разного диаметра в центре), которые устанавливают в центральное посадочное отверстие пропа, в случае если диаметр отверстия несущего винта оказался больше диаметра вала используемого мотора. Так как не все разработчики комплектуют пропы набором таких переходных колец, рекомендуется заблаговременно сверять диаметр отверстия приобретаемых пропов с диаметров вала вашего мотора.
Фиксироваться винт на моторе может исходя из того, какой из способов крепления поддерживает ваш мотор. Если вал мотора не подразумевает никаких вариантов крепежа (резьб. соединение, различные приспособления для крепления и т.д.), в таком случае применяются специальные адаптеры, такие как пропсейверы и цанговые зажимы.
- Пропсейвер – представляет из себя втулку с боковыми симметрично расположенными отверстиями в которые вкручены винты.
Втулка надевается на вал мотора и фиксируется боковыми винтами. Поверх втулки устанавливается пропеллер который в свою очередь фиксируется резиновым кольцом идущим в комплекте с втулкой (как правило в комплекте их несколько). Из-за своей ненадёжности, но в тоже время быстрого монтажа, лучше всего подходят для проведения кратковременных тестовых полётов в процессе сборки беспилотника.
- Цанговый зажим – по сравнению с пропсейвером является более сбалансированным и надёжным адаптером. Цанговый зажим состоит из разрезной конусообразной втулки с резьбовым соединением (Цанга), зажимной втулки, шайбы и кок-гайки. Сначала на вал мотора одевается цанга, затем зажимная втулка, после идут несущий винт (пропеллер) с шайбой, замыкает конструкцию зажима кок-гайка.
Бесколлекторные моторы с наружным ротором (типа «Outrunner») как правило, в верхней его части, имеют несколько резьбовых отверстий рассчитанных под установку различных адаптеров и креплений. Не менее популярным вариантом крепления пропеллера на валу БК мотора является самозатягивающая гайка.
Вал такого мотора на конце имеет резьбу, направление которой противоположно направлению вращения ротора. Такой подход исключает самопроизвольное откручивание фиксирующей гайки, обеспечивая безопасную и надежную эксплуатацию дрона.
Защита несущих винтов
Защита несущих винтов – призвана исключить прямой контакт силовой установки БЛА с встречным объектом, сохранив тем самым её целостность и работоспособность, а также не допустить получение травм о быстро вращающиеся пропеллеры в результате столкновения с людьми и животными. Защита пропеллеров крепится к основной раме. В зависимости от варианта исполнения может как частично перекрывать рабочую зону силовой установки, так и полностью (кольцевая защита). Защита винтов чаще всего применяется на небольших (игрушечных) БЛА. Применение в сборке элементов защиты несёт и ряд компромиссов, среди которых:
- Может вызывать избыточную вибрацию.
- Как правило выдерживает не сильные удары.
- Может понизить тягу, если под пропеллером размещено слишком много крепёжных опор.
Балансировка
Неудовлетворительная балансировка имеет место быть у большинства недорогих пропеллеров. Чтобы в этом убедиться, далеко ходить не надо, достаточно вставить в центральное посадочное отверстие винта карандаш (как правило при дисбалансе одна сторона будет тяжелее другой). В связи с чем настоятельно рекомендуется проводить балансировку своих пропов, перед тем как устанавливать их на моторы. Несбалансированный пропеллер будет вызывать избыточные вибрации, которые в свою очередь отрицательно влияют на работу полётного контролера (проявляется в некорректном поведении дрона в полёте), не говоря уже об увеличении шумности, повышенном износе элементов силовой установки и ухудшении качества съёмки подвешенной камеры.
Пропеллер может быть уравновешен разными способами, но если вы строите беспилотник с нуля, то в арсенале инструментов обязательно должен быть недорогой балансир пропеллеров, позволяющий легко и просто определять дисбаланс веса в винте.
3. ESC
ESC (англ. Electronic Speed Controller; рус. электронный контроллер скорости) — позволяет полётному контроллеру управлять скоростью и направлением вращения мотора. При правильном напряжении, ESC должен выдерживать макс. ток, который может потреблять мотор, а также ограничивать ток проходящий через фазу при коммутации. Большинство ESC, применяемых в беспилотном хобби, позволяют мотору вращаться только в одном направлении, однако с правильной прошивкой они могут работать в обоих направлениях.
Подключение
Изначально ESC может сбивать с толку, потому что для его подключения доступно несколько проводов/контактов/коннекторов, доступных с двух сторон (ESC может приходить как с уже припаянными коннекторами, так и без).
- Подача питания: два толстых провода (обычно чёрный и красный) предназначены для подачи питания от распределительной платы/жгута проводов к которым питание приходит непосредственно от основной аккумуляторной батареи дрона.
- 3 коннектора: С противоположной стороны контроллера доступны три коннектора предназначенные для соединения с тремя пулевидными коннекторами (как правило идут в комплекте с моторами) на бесколлекторном моторе. Применение коннекторов при подключении ESC позволяет при необходимости (в случае сбоя) осуществить быструю смену контроллера без использования паяльника. Бывает, что пулевидные коннекторы идущие с мотором не соответствуют коннекторам на регуляторе, в таком случае просто замените на подходящие.
- 3-контактный R/C servo разъём с тонкими проводами: посредством которых осуществляется обработка сигнала поступающего от приёмника, из которых один провод является сигнальным (передача сигнала газа к ESC или вход), второй «минус» (или земля), и плюсовой провод (не задействуется, если отсутствует встроенный BEC; при встроенном BEC является выходом 5В питания, который в последствии можно использовать для питания бортовой электроники).
BEC
Во времена зарождения авиамоделизма в качестве силовой установки использовался двигатель внутреннего сгорания, а питание бортовой электроники осуществлялось от небольшой батареи. С приходом электрической тяги и регуляторов (ESC), в последние, стали включать так называемую цепь устранения батареи — BEC (на англ. Battery Eliminator Circuit; или преобразователь бортового питания; как правило, обеспечивает дополнительный источник тока напряжением 5В при силе тока 1А, либо выше).
При сборке мультиротора необходимо подключить все ESC к контроллеру полёта, но потребуется только один BEC, иначе могут возникнуть проблемы при подаче питания на одни и те же линии. Поскольку обычно нет способа отключить BEC на ESC, лучше всего удалить красный провод (+) и обмотать его изолентой для всех ESC, кроме одного. Также важно оставить чёрный провод (земля) для общего заземления.
Прошивка
Не все существующие на рынке ESC одинаково хороши для применения в мультироторных сборках. Важно понимать, что до появления многомоторных БЛА, бесколлекторные моторы использовались в первую очередь в качестве силовой установки радиоуправляемых автомобилей, самолётов и вертолётов. Большинство из них не требуют быстрого времени отклика или обновления. ESC с встроенным программным обеспечением SimonK или BLHeli способны очень быстро реагировать на входящие изменения, что в целом предопределяет разницу между стабильным полётом или крашем.
Распределение питания
Поскольку каждый ESC питается от основной батареи, основной разъем АКБ должен быть как-то разделен на четыре ESC. Для этого используется плата распределения питания или жгут распределения питания. Эта плата (или кабель) разделяет положительные и отрицательные клеммы основного аккумулятора на четыре. Важно отметить, что типы разъёмов, используемых на аккумуляторе, ESC и распределительной плате, могут не совпадать, поэтому лучше по возможности выбирать «стандартный» разъём (например, Deans), который используется повсеместно. Многие недорогие платы могут требовать пайки, в данном случае пользователь решает сам какой конкретный разъём ему использовать в сборке. Самый простой распределитель питания может включать в себя два входных клеммных блока, либо пайку всех положительных соединений вместе, а затем всех отрицательных соединений вместе …
4. Аккумулятор
Химия
Батареи, используемые в беспилотных летательных аппаратах, в настоящее время исключительно литий-полимерный (LiPo), причем состав некоторых из них бывает достаточно экзотичным — литий-марганцевые или другие варианты лития.
Напряжение
На практике вам потребуется только один аккумулятор для вашего БПЛА. Напряжение этой батареи должно соответствовать выбранным вами БК моторам. Почти все АКБ, используемые в наши дни, основаны на литии и содержат несколько элементов (банок) по 3.7В каждая, где 3.7В = 1S (т.е однобаночная АКБ; 2S – двух баночная и т.д.). Поэтому батарея с маркировкой 4S, вероятно, будет иметь номинальное значение: 4 × 3.7В = 14.8В. Также количество банок поможет вам определить, какое зарядное устройство необходимо использовать. Отметим, что однобаночная батарея большой ёмкости физически может выглядеть как многобаночная батарея низкой ёмкости.
Ёмкость
Ёмкость аккумуляторной батареи измеряется в ампер-часах (Ач). Аккумуляторы небольших размеров могут иметь ёмкость от 0.1Ач (100 мАч), ёмкость АКБ для беспилотных летательных аппаратов среднего размера может варьироваться от 2-3Ач (2000 мАч — 3000 мАч). Чем выше ёмкость, тем дольше время полёта, и соответственно тяжелей АКБ. Время полёта обычного БПЛА может находится в интервале 10-20 минут, что может показаться недолгим, но вы должны понимать, что беспилотник в процессе полёта постоянно борется с гравитацией, и в отличие от самолёта, он не имеет поверхностей (крыльев) обеспечивающих помощь в виде оптимальной подъёмной силы.
Скорость разряда
Скорость разряда от литиевой батареи измеряется в «C», где 1C — ёмкость батареи (обычно в ампер-часах, если вы не рассматриваете дрон размером с ладонь). Скорость разряда большинства LiPo батарей составляет не менее 5C (в пять раз больше ёмкости), но, так как большинство моторов, используемых в мультироторных БЛА, потребляют большой ток, батарея должна иметь возможность разряжаться при невероятно высоком значении тока, который, как правило, составляет порядка 30А или более.
Безопасность
LiPo АКБ не совсем безопасны, так как они содержат газообразный водород под давлением и имеют тенденцию гореть и/или взрываться, когда что-то не так. Таким образом, если у вас есть какие-либо сомнения относительно работоспособности аккумулятора, не в коем случае, не подключайте его к беспилотнику или даже к зарядному устройству — считайте его «списанным» и утилизируйте его надлежащим образом. Контрольные признаки того, что с аккумулятором что-то не так это вмятины или вздутие (т.е. утечка газа). При зарядке LiPo батареи лучше всего использовать безопасные LiPo ящики (Battery safe box). Хранение батареи также лучше осуществляться в этих ящиках. В случае краша, первое, что вам нужно сделать, это отключить и проверить аккумулятор. Батарея исполненная в боксе может увеличить вес, но при этом реально поможет защитить АКБ при краше. Некоторые производители продают аккумуляторы с жестким чехлом и без него.
Зарядка
Большинство LiPo аккумуляторов имеют два разъема: один предназначен для использования в качестве основных «разрядных» проводов, способных выдерживать большой ток, а другой, обычно меньшего размера и короче, является разъёмом для зарядки (как правило белый JST разъём), в котором один контакт соответствует заземлению, а остальные, количеству банок АКБ.
Монтаж
Аккумуляторная батарея является самым тяжелым элементом беспилотника, поэтому её следует устанавливать в центральной мёртвой точке, чтобы обеспечить одинаковую нагрузку на моторы. Аккумуляторная батарея не подразумевает какого-либо специального монтажа (особенно саморезы, которые могут повредить LiPo и вызвать возгорание), поэтому некоторые используемые сегодня методы монтажа включают в себя ремни на липучке, резиновые, пластиковые отсеки и другие. Самым распространённым вариантом монтажа АКБ является подвешивание батареи под рамой с помощью ремня с липучкой.
Мои самодельные бормашинки с бесколлекторными двигателями.
Денис52
Эта была одной из первых.
Наконечник Boride с цангой 2.35мм в качестве донора.
Мотор B20-40-31L
Технические характеристики:
Размеры: 20мм x 40мм
KV: 1850 rpm/v
Максимальный ток: 8A
Максимальная мощность: 170W
Сборка
Подключение, контроллер на 20А и сервотестер
Денис52
Модернизация с патроном проксон.
Денис52
Бормашинка-карандаш)
После модернизации первой бормашинки остался вал под цанги 2.35мм, захотелось его куда нибудь приспособить.
https://yadi. sk/i/lbcUWy6DyEYLC
Денис52
Бормашина-фрезер.
Выполнена по типу шпинделя, т.е. вал мотора одновременно является цанговым валом. Патрон ER16 зажимает от 1 до 10мм.
Вес машинки 440гр,
длина 110мм,
диаметр 36мм
Второй вариант с большим двигателем.
Вес 485гр
длина 120мм
Еще не доделал комплект.
Денис52
Опыт с трехкулачковым патроном.
Это далеко не все машинки, их было более десяти разновидностей, но не все как-то получалось фоткать и снимать, о чем иногда жалею.
planetaplan
Круто!
yuko
Очень уважаю такое самодельчество, действительно круто!
А блок питания тоже сам?
Халит
интересная тема.
я тут приобрел бормашину от компании «Профиль», прочувствовал прелести прямого привода…
Денис52
yuko
А блок питания тоже сам?
Когда как, что на фото и видео да, самодельные, из электронного трансформатора для галогенок Ташибра 250вт, а для мощных машинок иногда покупаю готовые, все от задач зависит.
Халит
я тут приобрел бормашину от компании «Профиль»
Хорошая машинка, приходилось работать Бшкой, только если по мне так оооочень громоздкая, ооочень тяжелая и оочень дорогая, особенно для коллекторного движка.
chyuck
Круть
КромешНИК
Это впечатляет!
С уважением.
Халит
Денис52
ооочень тяжелая и оочень дорогая, особенно для коллекторного движка.
с удовольствием приобрету машину вашего производства.
Нестор74
Очень достойно!
я бы тоже такую хотел иметь в хозяйстве.
Денис52
Халит
с удовольствием приобрету машину вашего производства.
Производства у меня нет, это чисто хоббийный интерес, просто делюсь опытом, так сказать от самодельщика самодельщикам.
Иногда делаю на заказ, когда интересный проект появляется, но это в индивидуальном порядке.
Нестор74
я бы тоже такую хотел иметь в хозяйстве.
Что мешает, давайте делать 😊
Денис52
Была задумка сделать серию из трех машинок Ф24,28 и 36мм перекрывающих все задачи. Пока удалось «отшлифовать» конструкцию двух 28 и 36мм, Ф24мм пока в процессе, но может так получиться, что хватит и двух машинок.
Это первичные прикидочные эскизы, что-то уже тестировалось, а что-то еще впереди.
Юрий Александрович Т
Видно что все надежно и основательно.Фрезерный вы сделали интересно посмотреть на микро токарный.Я думаю вы сможете.
[B][/B]
Limon2017
Муж просил спросить можно ли такую сделать, выдерживают 140 гр С 1 час с регулятором оборотов на блоке управления и с приводом от педали. Если да, то сколько стоить будет?
Денис52
Юрий Александрович Т
микро токарный
По дереву прямой привод бабки запросто можно сделать на бесколлекторнике, делал когда-то такой, на дубовых подшипниках скольжения, шелестит еле слышно,
а вот по металлу сложнее, обороты нужны меньше, а крутящий момент больше. Токарный резец по металлам он ведь не режет, а скорее выдавливает стружку. На токарном можно «шабрить», тогда и обороты можно вплоть до 50т выставить.
Вот так я выравниваю кривые китайские патроны, прям на валу, обычным острым обломком твердосплавной фрезы, главное угол реза подобрать, очень эффективный съем происходит, это что-то типа механического шабрения получается.
https://yadi.sk/i/fnuqTphc32NaiN
Limon2017
Муж просил спросить можно ли такую сделать, выдерживают 140 гр С 1 час с регулятором оборотов на блоке управления и с приводом от педали.
Ничего себе, 140гр 😊
боюсь что вряд ли магниты ротора выдержат такую температуру.
А где работать? Руки больше 70гр уже не держат…
Халит
Денис52
Иногда делаю на заказ, когда интересный проект появляется, но это в индивидуальном порядке.
поинтересуюсь тогда, что для вас «интересный проект»?
Денис52
Халит
поинтересуюсь тогда, что для вас «интересный проект»?
Вопрос не простой, ну, наверное как минимум то, чего не делал еще 😊
На самом деле ведь конструкций и инженерных решений может быть много. Взять хотя бы две самые крупные бормашинки, что выше, они при всей своей схожести имеют разные конструкции, и для роторов были применены разные решения, кроме того имеют разные корпуса. А внешне мало отличимые машинки, синяя имеет двигатель 3670, черная 3680 всего то.
Вы ставьте задачи конкретней, а там можно и подумать, глядишь и идея появится.
Я прошу понять меня правильно, у меня есть любимая работа, которой я отдаю 8 часов в день. И ее мне хватает для хлеба с маслом, поэтому бормашинки на поток я ставить пока не собираюсь, не моё это. А вот решать новые инженерные задачи что-то придумывая, могу себе в качестве хобби позволить.
влад-ч
А можно подробнее о примененных моторчиках и контролерах?
Как я понимаю моторы авиамодельные?
Kazik.Ku
Просто прелесть, как хороши бормашинки, прям самое то, что надо! Хотелось бы повторить, очень. Кабы подробную инструкцию, сам-то ни в жисть не сдюжу- токарить есть, а технологий нету, к сожалению.
Денис52
А можно подробнее о примененных моторчиках и контролерах?
Как я понимаю моторы авиамодельные?
Для бормашинок лучше подходят инраннеры (inrunner) это двигатели с внутренним ротором. Применяются они в основном на авто и судомоделях, в авиамоделях чаще используются аутранеры (outrunner) с внешним ротором.
А вот контроллеры я использую наоборот авиа, с автомодельными как-то не задалось. Авиа контроллеры удобней в использовании, они позволяют двигателю не запускаться сразу после подачи питания, а только после поворота ручки сервотестера, это и для безопасности хорошо.
Контроллеры беру вертолетные самые простые и дешевые (300-500р), как правило на ток 30-50А более чем хватает. С подключение все элементарно, вход постоянка, трехфазный выход на двигатель и сервотестер регулятор на разъеме.
https://ru.aliexpress.com/stor…14.12010608.0.0 . 8YUnWh
Хотелось бы повторить, очень.
Значит надо делать 😊 Тем более раз токарный есть.
Для начала надо определиться с размером бормашинки в зависимости от предполагаемых задач. Для первого раза лучше выбрать двигатель не мелкий 2860 или 2968.
Конкретный выбор зависит от желаемых оборотов. Обороты обозначаются в Kv (об/вольт) Меньше обороты — больше крутящий момент и наоборот.
Как правило менее оборотистые двигатели стоят дороже. Поэтому лучше взять дешевый нужных размеров и перемотать под нужные обороты.
Перемотка дело не сложное, количество витков там очень маленькое (4-6витков), схема простая. Главное аккуратно разобрать и снять старую обмотку.
Вот например статор нового двигателя намотал, он сделан из трех коротких статоров склеенных вместе, здесь всего 4 витка достаточно толстого провода 0.6мм, 3 часа неспешной работы. Разборка заняла больше времени, все отскоблить и очистить от старой обмотки.
Можно без перемотки, но тогда нужно подбирать по оборотам, вот например 1680Kv
http://www.ebay.com/itm/MOTORE…xYAAOSwd0BV5b8B
А эти перематывать, т. к. шибко шустрые
http://www.ebay.com/itm/High-E…zEAAOSwc3ZUq69G
http://www.ebay.com/itm/GoolRC…%3D111849690491
Далее выбор патрона и его соединение с ротором, в общем все решать по мере поступления …
yuko
Очень интересно! Тему в закладки. буду изучать.
alex-wolff
прикольно.
Тоже была мысля сделать прямой привод на кучу своих наконечников форедомовских, даже где то двигатель валяется, но чёто так и не дошло до реализации. вобщем однозначный респект.
Kazik.Ku
Здорово! А патрон или цангу и подшипник где- какой лучше брать, подскажите пожалуйста, а?
Денис52
Kazik.
Здорово! А патрон или цангу и подшипник где- какой лучше брать, подскажите пожалуйста, а?
Выбор патрона в некотором смысле дело интимное 😊
Кому-то трехкулачковый нравится, кому-то быстрозажимной подавай, мне вот больше цанговые ER или проксоновский.
PROXXON 28940 можно у нас купить, к нему нужен еще переходник на вал или самому выточить вал под конкретные цели. Чертеж вала под проксоновские цанги я здесь выкладывал.
Патроны ER8, 11, 16 это уже в китае, дешевле будет. Алиекспресс, таобао, ибэй здесь помогают. Патроны с посадкой на вал меньше 5мм найти почти не реально, да и те что с отверстиями от 5мм требуют повозиться, отверстия как правило провалены и геометрия хромает. Поэтому в ряде случаев разумней взять сразу цанговый вал, проточить его до нужного диаметра и просто заменить им вал ротора.
Подшипники дело серьезное, лучше не экономить, впрочем они не так дороги. При выборе нельзя превышать допустимые обороты, чревато повышенным нагревом и быстрым износом.
Хотя у меня в практике были случаи когда я отходил от этого правила, вот например скоростной шпиндель для чпу с оборотами за 50т, подшипники SKF 628/8 работают выше своего предела и на удивление хорошо работают, но все же такие случаи скорее частный случай и исключение из правил.
После покупки подшипники нужно хорошенько вымыть в бензине, высушить и поменять смазку на PTFE или масло для стоматологических наконечников, чем и смазывать периодически.
Покупаю подшипники в интернет магазинах, например часто в емех беру, но конечно они есть не только там.
6804ZZ большой подшипник в бормашине-фрезере.
https://www.emex.ru/f?detailNum=6804ZZ&packet=-1&brandId=29
На производителе тоже лучше не экономить, выйдет боком.
NTN, NSK, SKF будет правильным выбором.
Да, и не забывать про натяг, это обязательно
Kazik.Ku
Спасибо большое за готовую информацию- ёмко, четко, бальзам на сердце)))Поварю пока в голове.
maxx2000
Денис52
Покупаю подшипники в интернет магазинах, например часто в емех беру, но конечно они есть не только там.6804ZZ большой подшипник в бормашине-фрезере.
А если керамические подшипники поставить? Дорого, зато хоть до 100 тыщ крути и никакого обслуживания весь срок службы.
Денис52
maxx2000
А если керамические подшипники поставить? Дорого, зато хоть до 100 тыщ крути и никакого обслуживания весь срок службы.
Дык я не против, и в случае с высокоскоростным шпинделем всерьез рассматривал этот вариант, но обошлось.
Все это вопрос цены, ну и конечно нужно чтобы «овчинка выделки стоила»
Если ценник значения не имеет, то начать наверное стоит не с подшипников, а сделать лазерную нарезку листов статора и ротора, чтобы сталь была определенной марки и минимальной толщины (толстоват все таки металл у китайцев). Потом отшихтовать их. На ротор поставить неодимы нужного качества и количества. Обязательно иметь под рукой стенд динамической балансировки. Ну и потом можно повыеживаться с подшипниками, да еще не просто с керамикой, а с прецизионными радиально-упорными. Представляете сколько все это будет стоить 😊
А если ничего этого нет и обороты до 20-30т, то какой смысл в керамике?
Проще и дешевле пшикнуть масла и работать дальше.
У брендовых производителей подшипники ходят очень долго, если они по уму поставлены.
влад-ч
Kazik.Ku
А патрон или цангу и подшипник где- какой лучше брать
По мне лучше всего взять стандартный форедомовский наконечник номер 30 и пристыковать к нему моторчик через муфту переходник, это наиболее простой вариант.
У меня давно эта идея в голове крутилась, но как то упустил из виду существование модельных моторов, и поэтому ничего толкового в голову не приходило.
Денис52 — Сервотестер это вот это ?
http://www.kosmodrom.com.ua/el.php?name=SERVO-TESTER
http://lviv.prom.ua/p64025594-…l?no_redirect=1
И еще нужен сильноточный блок питания, регулировка напряжения на блоке питания нужна или нет, какое напряжение?
Лучше брать готовый или же переделывать из компового или для галогенок?
А движки лучше брать подороже или можно не парится и взять на алиэкспресс?
Извините за кучу вопросов.
Но ваша идея и ее реализация супер!
Денис52
влад-ч
пристыковать к нему моторчик
Таких конструкций в сети много, только это несколько разные вещи. У меня была цель сделать не проще, а удобнее для работы. А простота здесь как правило есть обратная сторона удобства.
http://popgun.ru/files/g/97/orig/5524784.jpg
https://www.shipmodeling.ru/imgup/img_cqy8n1464883029.jpg
http://fion. ru/images/handmade…1ebbd9dbf85.jpg
влад-ч
Сервотестер это вот это ?
Да.
https://ru.aliexpress.com/stor…0608.0.0.WIUNTM
влад-ч
И еще нужен сильноточный блок питания, регулировка напряжения на блоке питания нужна или нет, какое напряжение?
Лучше брать готовый или же переделывать из компового или для галогенок?
Что касается тока, то для импульсного БП 20-40А не проблема. Регулировка не нужна, достаточно правильно выбрать напряжение БП, а остальное сделает сервотестер, он регулирует уже трехфазное напряжение на двигателе.
С компа никогда не брал БП, а вот транс для галогенок использовал часто (если мощности хватает), с ним получается очень компактно. Но можно и готовый взять на 20-30А, они в районе 1тр.
влад-ч
А движки лучше брать подороже или можно не парится и взять на алиэкспресс?
Движки я беру на алиэкспресс, ибей и хоббикинге
Брендовые моторы немного получше будут, но они и стоят намного дороже. Меня китайские устраивают полностью.
влад-ч
Спасибо за подробную консультацию!
Limon2017
Денис52
Ничего себе, 140гр 😊
боюсь что вряд ли магниты ротора выдержат такую температуру.
А где работать? Руки больше 70гр уже не держат…
Стерилизация.
влад-ч
Еще раз прошу прощения за надоедливость и много вопросов.
Денис52
Поэтому в ряде случаев разумней взять сразу цанговый вал, проточить его до нужного диаметра и просто заменить им вал ротора.
А как в общих чертах происходит процесс замены вала ротора цанговым валом.
Денис52
А как в общих чертах происходит процесс замены вала ротора цанговым валом
Очень просто, выпрессовывается родной вал и на его место ставится новый. Вернее, сидят с натягом только алюминиевые крышки, что спереди и сзади ротора, если их снять (они еще приклеены к магнитам и магнитопроводу), то вал в самом магнитопроводе сидит достаточно свободно. В тисочках легонько давишь на вал уперевшись в одну из крышкек, она деформируется, отклеивается и ее уже можно стащить с вала.
влад-ч
А ротор не сорвется при работе с нового вала или он как то дополнительно фиксируется после сборки?
Денис52
А ротор не сорвется при работе с нового вала или он как то дополнительно фиксируется после сборки?
Там на валу лыска сделана, а в магнитопроводе соответственно под неё плоскость. Я конечно за все моторы не могу говорить, но те что видел было так. Но даже если в каком-то будет без лыски, то можно на фиксатор посадить, не сорвется.
И еще, вал внутри ротора как правило имеет бOльший диаметр, чем видимая часть вала, которая торчит из двигателя или на которой сидят подшипники. На мелких моторах валы часто имеют три диаметра, например, из двигателя торчит Ф2.35мм, под подшипник Ф3мм, а внутри ротора Ф4мм. Так что прежде чем шлифовать цанговый вал нужно разобрать и промерить диаметр.
При выпресовке крышки сильно деформировать не надо, чуть чуть стронуть, чтобы клей отошел и снимать руками прокручивая. На крышках грузики балансировочные и их нужно пометить в каком положении стояли и вернуть потом на место.
http://electrotransport.ru/ussr/images/3/uklatu.jpeg
http://electrotransport.ru/uss…downfile&id=805
влад-ч
Спасибо!
KREPKIY51
Денис.
Расскажите подробнее, что нужно для управления такими моторами. Что куда, в какой последовательности присоединять. Желательно с ссылками на али или ебей.
Спасибо.
Денис52
Денис.
Расскажите подробнее, что нужно для управления такими моторами. Что куда, в какой последовательности присоединять. Желательно с ссылками на али или ебей.
Спасибо.
Так вот же, в первом сообщении фото
https://forum.guns.ru/forums/ic…52/17452290.jpg
Это собственно все, что нужно)
Желтый это контроллер (ESC), черный и красный провод у него это питание, а с обратной стороны три синих провода, это на двигатель.
Синий это сервотестер, он соединяется с контроллером трехжильным шлейфом (см.фото)
Ссылки на контроллер и сервотестер выше уже давал. Или они не видны?
Ну давайте еще раз повторим)
https://ru.aliexpress.com/stor…0608.0.0.WIUNTM
https://ru.aliexpress.com/stor…14.12010608.0.0
Это как пример, а так контроллер выбирается на тот ток который нужен.
Денис52
Доделал БП для черной бормашины.
Халит
добротно!
chyuck
Денис52
Доделал БП
Пора в барахоке тему создавать,да заказы брать
——————
.а парень очень просто, с улыбкой отвечал, я с Дальнего Востока — я с города Сучан!!!
CEMEHbi4
отмечусь, поизучать.
aleksgol
В сообщении (Вот например статор нового двигателя намотал, он сделан из трех коротких статоров склеенных вместе) Дмитрий а можно по подробнее про ротор как магниты стыковать. Все мои попытки сделать тандем из двух двигателей 1230 без результата,пытался запустить от одного контролера соеденив вылы пшик двигателя.А вот чтобы обьеденить с магнитами затыр …
Денис52
1230 не разбирал, покажите как он внутри, ротор/статор, интересно.
А что не понятно со стыковкой?
Одноименной полярностью в ряд + к +, — к -, с третьим мотором не повезло, полярность ротора не совпала, пришлось переклеивать.
aleksgol
Спасибо! затыр был с полярностью магнитов ,я думал если +к- притягиваются значит магнит как бы удлиняется в этом моя ошибка.1230 двух полюсный
ротор больше ничем не различаются от ваших.Обьеденить нужно для замены двигателя maxon Ф16мм х 56мм (47000 35 ват )в виду непригодности ремонта обмотки,а купить новый 375 евро стоит.1230 обьденю через втулку 12мм внутренный 16мм наружный по мощности получается около 100ват. Подошел бы и один но условия жeсткие пусть будет запас.
Денис52
aleksgol
1230 двух полюсный ротор больше ничем не различаются от ваших.
Сделайте пожалуйста фото ротора и статора с обмотками, хочу глянуть на него.
aleksgol
Сын приедет ко мне и попрошу чтобы сфотографировал у меня нечем фотографировать
kU
Подкину идею: сделать двигатель, который напрямую (без гибкого рукава) втыкается в наконечники американского стандарта.
Существует достаточно много приспособ (сверлилки, ленточные напильники и т.п.), которые либо используют форедомовский 30-й наконечник, либо сами как бы являются наконечником.
Но наличие гибкого рукава в таких системах заметно ухудшает характеристики.
Лично мне такой девайс был бы интересен.
Денис52
Сын приедет ко мне и попрошу чтобы сфотографировал у меня нечем фотографировать
Хорошо, буду ждать.
А сам двигатель такой
http://forum.woodtools.ru/index.php?topic=73768.0
или другой? Kv какое?
Подкину идею: сделать двигатель, который напрямую (без гибкого рукава) втыкается в наконечники американского стандарта.
Ну тут пожалуй идея не нова)
Это второе, что приходит людям в голову)
http://plazon.ru/pro-radio/mastak/bor1.jpg
http://fion.ru/images/handmade…1ebbd9dbf85.jpg
в смысле прикрепить двигатель к наконечнику.
Лидирует конечно двигатель с патроном на валу)
Только зачем? Рукав конечно по жестче будет, чем провод к движку, а дальше только минусы, развесовка с наболдашником/мотором на конце, габариты не малые, все это скажется на маневренности и удобстве.
Да, относительно проще, но если бы мы сложностей боялись, мы бы много чего не сделали (в Советские времена разумеется).
А сейчас вот так, до основания
http://www.verapravaya.ru/media/articles/full/0/252.jpg
Когда-то это был Вoлгoгpaдcкий тpaктopный гигант, одна смена 15т человек((
«Слава», чему-то/кому-то там, принято сейчас говорить в таких случаях тчк
AAAAA
Существует достаточно много приспособ (сверлилки, ленточные напильники и т.п.), которые либо используют форедомовский 30-й наконечник, либо сами как бы являются наконечником.
https://i2.guns.ru/forums/icons…933/2933173.jpg типа того?)
Денис52
https://i2.guns.ru/forums/icons…933/2933173.jpg типа того?)
Вот так было бы удобней и симпатишней)
aleksgol
Похож
aleksgol
У меня 2 вот таких только kv4200 после перемотки буду смотреть обороты http://www.parkflyer.ru/51855/ru/product/2469355/
aleksgol
У меня 2 вот таких только kv4200 после перемотки буду смотреть обороты http:
Денис52
aleksgol
У меня 2 вот таких только kv4200 после перемотки буду смотреть обороты http://www.parkflyer.ru/51855/ru/product/2469355/
Да, да, вот он то меня и интересует)
Вы их уже разобрали, как крышки снимаются?
kU
AAAAA
типа того?)
Да, именно так. И моторчик можно достаточно мощный, т. к. предполагаемое использование — в приспособах, а не как удерживаемую руками бормашинку.
Денис52
И моторчик можно достаточно мощный, т.к. предполагаемое использование — в приспособах
Но тогда это будет уже не бормашина, а просто некий привод для вращения чего либо. И если не планируется работа в руках как бормашиной, то и рукав получается не будет ограничивать.
kU
смысл в том чтобы избавиться от недостатков рукава: потеря мощности, риск перекручивания при подклинивании инструмента, лишние вибрации на высоких оборотах.
aleksgol
Крышки пока не снял. который сгорел лежит в дихлоретане второй день, до этого лежал в ацетоне сдернуть крышки на смог приклеены чем то. если не получится снять проточу корпус на токарном я думаю там до обмоток мм 3-4 есть а там видно будет главное статоры достать что бы обьеденить, думаю через втулку мненужен Ф16мм
Денис52
aleksgol
Крышки пока не снял. который сгорел лежит в дихлоретане второй день, до этого лежал в ацетоне сдернуть крышки на смог приклеены чем то.если не получится снять проточу корпус на токарном я думаю там до обмоток мм 3-4 есть а там видно будет главное статоры достать что бы обьеденить, думаю через втулку мне нужен Ф16мм
Не понял, а как же вы тогда решили, что ротор не отличается, раз крышки не сняли?
aleksgol
ротор больше ничем не различаются от ваших
Я себе ваш ротор представлял совсем иначе, чем мои, поэтому и попросил фото.
У вас оооочень интересный проект запланирован, во всяком случае для меня, да и сложность далеко не начального уровня.
Также я предполагаю совершенно другую конструкцию статоров, нежели в моих моторах, потому мне не понятна фраза «статоры достать», посмотрим как оно на самом деле.
В общем жду с нетерпением результатов.
aleksgol
Первая попытка была года полтора назад.1230 2 шт.и один 1220 мне отдали горелыми. разбирал просто в тисках выдавил роторы на зад. крышки деформировались. статоры вышли легко размотал было по 7 витков 3 жилы вытачил корпус 16 мм и две крышки под подшипник3х9х2,5
мотал столько же. роторы как я писал соеденил +к- на ось3мм но он незапускался даже недергался.Решил спарку сделать на 1 валу разобрал перемотал две крышки новые два корпуса на Ф16 каждый запускался и работал без нагрева но когда соеденил паралельно проработал 2-3 секунды и пшик больше я этим не занимался купили новый Maxon 16х54 и установили в ручку а двигатели и корпуса выкинул.кстати разбирал 1220 там кольцевые магниты 2 штуки стояли хотел их снять они раскололись. Сейчас сново проблема с Максоном намотка статора отслоилась. Купил два 1230 сново попробывал стыковать на этот раз через втулку без разбора двигателей выставил фазировку чтобы крутились в разные стороны и валами соеденил втулкой запаралелил и сново пшик одного мотора.По новой не хочу выламывать конструктив поменять хочу.Максон стоит в ручке сквозь которую работает пылесос .Хочу оребрение на корпуса вытачить ф16мм.
aleksgol
aleksgol
Забыл написать 1230 статор з обмотки, а это кожух хочу поставить в ручку охлаждение будет лучше пылесосом
Денис52
Понятно, не забудьте насчет фото.
Я думаю крышки сидят на фиксаторе, передняя на резьбе, задняя на гладкую. На переднюю нужно прикрепить вороток, нагреть до 80гр и открутить расшатывая взад вперед, затем вынув ротор заднюю просто выбить.
melenki33
Денис д/день
Бормашинка-карандаш получил
спасибо
опробую отпишусь
Денис52
melenki33
Денис д/день
Бормашинка-карандаш получил
спасибо
опробую отпишусь
Приветствую, хорошо
Денис52
aleksgol, ну что там с фотками ротора/статора, будут?
Денис52
Две среднеразмерные машинки с двигателями 2968 по мотивам бормашины-фрезера 3680, т.е. одновальные.
Двигатели перемотаны на 2100kv, патрон ER11, вес бронзовой 300г, дюралевой 220г
влад-ч
Денис52
Двигатели перемотаны на 2100kv
Перемотка осуществляется в сторону увеличения или уменьшения витков?
Или же полюса по другому включаются?
Халит
Денис52
Две среднеразмерные машинки с двигателями 2968 по мотивам бормашины-фрезера 3680, т.е. цельновальные.
Двигатели перемотаны на 2100kv, патрон ER11, вес бронзовой 300г, дюралевой 220г
Отлично получилось, Денис!
Денис52
Отлично получилось, Денис!
Спасибо Владимир, но пока рановато, вот когда… тогда…)))
Перемотка осуществляется в сторону увеличения или уменьшения витков?
Или же полюса по другому включаются?
Тут значица так.
1. Обороты двигателя определяются индуктивностью его обмоток. Индуктивность в свою очередь пропорциональна квадрату числа витков.
2. Поскольку это трехфазные двигатели, то обмотки могут коммутироваться звездой или треугольником.
Т.е. в первом приближении изменить обороты можно просто перекоммутировав обмотки с звезды в треугольник и наоборот.
http://www.avislab.com/blog/wp…/brushless6.gif
При переходе от звезды к треугольнику обороты умножаются на 1.73 (во столько же уменьшится крутящий момент)
При переходе от треугольника к звезде на 0.57…
3. Для увеличения оборотов количество витков нужно уменьшить, для уменьшения — увеличить.
Как будет соединен двигатель заранее узнать невозможно, только по факту, даже один и тот же мотор может быть соединен по разному, не работают китайцы по гостам))
В случае с моими 2968 один двигатель был переделан на звезду с треугольника, а второй уже был звездой, поэтому перематывался.
Какая операция сложнее, сложно сказать, все зависит от качества заливки обмоток (как у китайца кисточка мазанет), некоторые относительно легко разматываются, а некоторые тяжело, приходится каждый проводок иголочкой выковыривать. В общем 80% успеха это аккуратно, не спеша разобрать мотор.
Даже винтики на крышках чтобы раскрутить, нужно не полениться, погреть мотор и взяв хорошую, подходящую отвертку раскачивая потихоньку выкрутить. Иначе обломаются, т.к. каленые и сидят на хорошем фиксаторе.
Денис52
Вторую решил помучить 16мм шаром, а она и не сопротивлялась))
За 10мин работы нагрелась до 45-50гр, причем в первые 4-5мин, потом так и держалась.
Вторая полегче бронзовой на 70гр, 220гр.
Шаровая твердосплавная фреза составляет почти треть веса машинки))
ДмитрийВолк
Очень понравилось. Так все таки можно у вас заказать такую как на последнем видио. И сколько это будет стоить?
Денис52
Очень понравилось.
Пока нет, много другой работы, три новых модельки никак не доделаю, до гриндера все никак руки не дойдут собрать, и надо как-то всё это сделать чтобы из дома не выгнали и с работы не уволили со всеми этими хоббями))
nsck
Получил борку от Дениса. Задумывалась как помощник форедому. Но после сегодняшнего дня она явно станет основным инструментом. Мощности мне за глаза, в руке удобно, всё сделано на совесть. Очень доволен, спасибо!
——————
https://www.instagram.com/dmitrynsck/
Халит
хочу сделать небольшой отзыв:
Денис, еще раз хочу поблагодарить за проделанную работу.
про сравнение с Профилем-М:
1. габариты. .. у вашей машины — это однозначный плюс. Профиль гораздо габаритнее, и такой нюанс как вынесенный двигатель при моей манере работы (когда инструмент не лежит на столе, а висит в воздухе) утомляет достаточно быстро. Также в плюс отмечу и компактность блока питания вашей машины.
2. оборотистость и момент — в принципе на уровне, может психологически, но мне показалось что на вашей машине верха лучше работают…с точки зрения эргономики мне работать вашей гораздо комфортнее. Момент на всем диапазоне оборотов более чем достаточен. При резьбе титана остановить машину не удалось (честно говоря — не особенно пытался, берегу).
3. удобство смены инструмента — в принципе примерно одинаково, опять же привыкаешь. и однозначно — цанги лучше держат инструмент, при условии, что диаметр хвостовика совпадает с цангой. Есть такой нюанс: возможно в будущем реализуете — можно просверлить вал патрона за посадкой цанги, скажем, диаметром 4-5 мм, чтобы инструмент садился более глубоко внутрь, создавая мЕньшую консольную нагрузку на подшипники. .. в принципе, мне надо будет попробовать сделать это на своей машине, чтобы не резать хвостовики бор-фрез…
в общем и целом — все отлично работает, и все нравится, еще раз благодарю вас за работу!
С уважением, Владимир.
прилагаю фото плашки резаной вашей машиной
Денис52
Ваши работы лучшая оценка)
Рад, что понравилась машинка и надеюсь она поможет осуществить самые смелые замыслы!
Денис52
Подниму тему))
Двигатель Tenshock 1030 попал ко мне в очень плачевном состоянии, видать прошел через ооочень кривые ручонки в попытках что-то из него сотворить.
Вал погнут, ротор побит, балансировки нет, подшипники изувечены, обмотки протеры, сам весь обшарпан, в общем руки бы оторвал…
А двигатель тем не менее очень хороший, фирмовый породистый немец конструкции 6N4P (6 слотов статора и 4 полюса ротора), что для Ф20мм очень круто, обычно четырехполюсники начинаются от 24мм. И из этого добра нужно было сделать бормашинку))
Испытания от блока питания 10В 2А!!, фреза тупенькая, однако моторчик рвёт будь здоров, если его нормально «кормить» вполне встанет рядом с более крупными китайчатами, а то и переплюнет))
Денис52
И еще одна поделка. Бормашина-карандаш уже была, на этот раз пусть будет бормашина-маркер)) 100тыс. об/мин!!
Двигатель Leopard LBA1625 15000kV
Вал сделан под стоматологические фрезы, коих в этом размере самый большой выбор, да и качество отменное.
Выход на 100тыс. об/мин нужно делать плавно, иначе синхронизация может срываться.
На видео показаны шаровые фрезы 1 и 3мм твердосплав и 1мм алмазная по стеклу.
Халит
Денис, поздравляю, отличные работы.
нумер 2 — практически то, о чем я писал 😊
Денис52
Денис, поздравляю, отличные работы.нумер 2 — практически то, о чем я писал
Спасибо)
Да, помню. Над 100тысячной я еще поработаю, попробую другой вариант конструкции, чисто ради эксперимента.
Халит
Денис52
Над 100тысячной я еще поработаю, попробую другой вариант конструкции, чисто ради эксперимента.
с удовольствием впишусь, если вы будете на то любезны.
Денис52
Да тут дело не в любезности, просто технологии пока нет, а чтобы она появилась нужно много времени, чтобы собрать несколько машинок данного типа.
Та, что на видео, собрана по сути на коленке, первый вариант, и кто его знает сколько их еще будет и будет ли. Ну и двигателей я таких больше не встречал в продаже, когда-то попался, я заинтересовался такими оборотами…
Халит
Денис52
собрана по сути на коленке
да, обратил внимание на проточку «цанги» выполненную на листе текстолита 😊
тем не менее, имейте, пожалуйста, меня в виду.
Денис52
да, обратил внимание на проточку «цанги» выполненную на листе текстолита
Ага, микротокарничег, по быстрому))))))
nsck
Денис, если вдруг, я тоже в теме на карандаш-маркер
Денис52
с удовольствием впишусь, если вы будете на то любезны.
Денис, если вдруг, я тоже в теме на карандаш-маркер
На 100т.об. вряд ли получится, движков нет, а вот поменьше возможно что нибудь и придумаю.
Денис52
В продолжение темы среднеразмерных машинок с двигателями 2968.
Среднеразмерная 3.
Максимальные рабочие обороты 10т.
Arkado
Послежу.
Денис52
Вот так выглядит перемотанный статор, намотан проводом 2х0.6мм
Послежу.
А что следить, делать надо, и воять, воять)))
Денис52
Среднеразмерная 2968 с патроном Проксон
Халит
Денис52
Среднеразмерная 2968 с патроном Проксон
вполне
Денис52
вполне
С этим патроном машинка получилась чуть чуть потише, потому что подшипник спереди стоит меньше)
Антон42
Среднеразмерная 2968 с патроном Проксон
Классно!
Денис, подскажите у этого патрона свои оригинальные цанги или подходят разные? Я к тому, что нужно их (цанги) где то отдельно заказывать?
Денис52
Цанги у проксона свои, оригинальные, они идут в наборе с гайкой.
Proxxon 28940
http://bormaw.ivsupport.ru/upl…ngi-proxxon.jpg
Цанги не плохие, подкаленные, но с особенностями, не очень ровные бывают, поэтому нужно проявить смекалку и с нужной стороны подклеить кусочек скотча.
Vit-3
Здравствуйте, Денис. Очень интересные машинки у Вас. Где можно прочесть характеристики и цены на них, если Вы делаете на заказ. Работаю с металлом, камнем. По этому нужна какая-то универсальная машинка (понимаю, что это, почти невозможно) или несколько разноплановых. Для разного камня нужны разные скорости. Очень облегчила бы работу присутствие педали управления скорости. Иногда использую стоматологическую бормашинку — 300 тыс.об. Но у нее слабое место — мощность. Заинтересовала Среднеразмерная 2968 с патроном Проксон, Среднеразмерная 3, низкооборотистая, высокомоментная, но не понял, надеюсь тоже с набором патронов и Бормашина — маркер. 100тыс. об/мин.
Спасибо!
Денис52
Здравствуйте! А какие именно характеристики вас интересуют?
Меня в основном интересовали только обороты и диапазон регулировки. Можете посмотреть характеристики самих моторов (на алиэкспресс, ибей) только они никакого отношения к рабочим режимам не имеют.
Каждая из машинок оснащена своим патроном, er11, er16, проксон, и для каждого патрона свои цанги. er11 позволяет устанавливать цанги для хвостовиков 1..7мм с шагом 0.5мм + несколько штук дюймовых размерностей и тд и тп
На заказ не делаю.
Антон42
Здравствуйте, Денис!
Теперь интересует оформление блока питания, кмк глухой корпус например из пластика не подойдет, нужна вентиляция и теплоотдача чтобы была? из чего лучше соорудить короб, что бы вместить туда потроха?
Может у компьютерщиков что можно поспрашивать?
alexalexalex
Денис, добрый день.
Есть к вам предложение-просьба: Вы сможете провести своеобразный мастер-класс по принципу «делай как я» по всему циклу от покупки всех составляющих на али-экспресс и до настройки/регулировки?
Ну например:
1. вы определяете, какую машинку вы хотите сделать следующей.
2. заказываете подходящий моторчик, подшипники, патрон/цанги, тестер сервопривода, контроллер, источник питания… скидываете сюда ссылки. а мы повторяем 😊
3. когда придут посылки, вы показываете, как разобрать/перемотать и т.д. мы повторяем 😊
4. вы делаете токарку. мы повторяем 😊
5. вы делаете блок питания. мы повторяем 😊
что скажете?
Попробую объяснить от себя: я очень хочу сделать бормашинку с бесколлекторным моторчиком, но у меня уже на выборе мотора, контроллера, сервотестера возникают опасения, что я выберу совсем несовместимые компоненты или окажется, что выбор в корне не правильный. В общем, если один раз пройти весь путь под вашим руководством, дальше будет гораздо проще 😊
AAAAA
Денис, добрый день.
Есть к вам предложение-просьба: Вы сможете провести своеобразный мастер-класс по принципу «делай как я» по всему циклу от покупки всех составляющих на али-экспресс и до настройки/регулировки?
Ну например:
1.
2. заказываете подходящий моторчик, подшипники, патрон/цанги, тестер сервопривода, контроллер, источник питания… скидываете сюда ссылки. а мы повторяем
3. когда придут посылки, вы показываете, как разобрать/перемотать и т.д. мы повторяем
4. вы делаете токарку. мы повторяем
5. вы делаете блок питания. мы повторяемчто скажете?
Попробую объяснить от себя: я очень хочу сделать бормашинку с бесколлекторным моторчиком, но у меня уже на выборе мотора, контроллера, сервотестера возникают опасения, что я выберу совсем несовместимые компоненты или окажется, что выбор в корне не правильный. В общем, если один раз пройти весь путь под вашим руководством, дальше будет гораздо проще
если не секрет, а зачем это ТС?) это добрый кусок работы, съёмка видео, объяснялки, плюс в личку вопросами замучают. может проще купить готовое у автора темы?)
Халит
Денис, спасибо за машину, вот очередной карвинг, выполненный в ее помощью:
Денис52
alexalexalex
Спасибо!А где такую цангу найти и где вы такие цанги покупаете?
Али, ибей, тао…
Халит
Денис, спасибо за машину, вот очередной карвинг, выполненный в ее помощью:
Отличная работа, Владимир!
Цангу 3/32 опробовали?
На втором фото разрез под фиксатор, под 90гр, чем режете?
Халит
Денис52
Цангу 3/32 опробовали?
На втором фото разрез под фиксатор, под 90гр, чем режете?
Денис, спасибо.
цанга работает (про свой долг вам помню, торчу немного).
фрейм режу обычной ножовкой по металлу, к сожалению фрезера пока нет ;(
Денис52
О каких цанговых валах речь?
ly01ik
Отмечусь, интересно
Sedoi93
Я бы тоже приобрел мини бор машину,если мастер ответит.
FullNaga35
интересно
Денис52
Sedoi93
Я бы тоже приобрел мини бор машину,если мастер ответит.
Надеюсь скоро появится в продаже в
http://stameskino.ru/
http://rezbaderevo.ru/kesha-v-stameskino
http://rezbaderevo.ru/igor-baz…vpechatleniyami
http://rezbaderevo.ru/bormashi…y-variant-anons
http://rezbaderevo.ru/seriynaya-bormashina-kesha-v-rabote
http://rezbaderevo. ru/bormashi…h-v-tvorchestve
Халит
поздравляю, Денис!
anshcustom
Подпишусь. Интересная тема. Я правильно понял, что можно заказать машинку под свои нужды и запросы?
Халит
с помощью машины от Дениса выполнена эта гравировка:
материал — титан. глубина поднутрения 1-1,5 мм.
Денис52
Спасибо, Владимир!
Классные и необычные у вас работы)
Про мелкую машинку не забыл, на данный момент остановился на одной конструкции, подобрал комплектующие и жду удобного момента чтобы начать сборку.
Я правильно понял, что можно заказать машинку под свои нужды и запросы?
Всё зависит от ваших запросов и моей занятости)
Халит
Денис52
Про мелкую машинку не забыл, на данный момент
о, Денис, отлично!
с нетерпением жду результата.
suhai123
Замечательно, хотелось бы узнать планируемые цены
A.M.M
Приветствую. А можно ссылку на контроллер, который Вы используете для бормашины-фрезер 1/2. А то у меня только 30-ти амперные контроллеры находятся, а в этих движках токи более существенные.
Денис52
30ти амперный и использую, его более чем хватит для любой бормашины.
Денис52
С Днём Космонавтики!! «Поехали!»
http://stameskino. ru/shop/CID_548.html
Халит
с почином, Денис!
Желаю успешного развития темы!
Денис52
Спасибо, буду стараться)
serjgraver
Денис, где бы посмотреть по перемотке инраннеров, в сети ничего нет
Денис52
Бормашина «Триада» с трехкулачковым патроном до 6.5мм + беспроводная педаль + синхронизатор пылесоса
Zebra2
с трехкулачковым патроном до 6.5мм
!!!!
planetaplan
Надо на 2.35 делать машинку безколлекторную,с быстрозажимным патроном, что бы для граверов,в конкуренцию пневматики дорогой.
AAAAA
«Триада»
прочиталось как ТриГада))) машинка по видео ну очч понравилась) и педаль беспроводная) торчащий ключ может мешать оперативно регулировать обороты. но владельцу ничего не мешает воткнуть туда гвоздь, а ключ под руками будет лежать)) провод стремноватый какой то, как у бабушкиного утюга. как вариант можно в версии «премиум» делать на блоке неск выходов под вторую бормашину и переключатель между ними)
Надо на 2.35 делать машинку безколлекторную,с быстрозажимным патроном,
)))лучше двигатель с переходником под съёмные наконечники для микромотора. кто то наконечник нск купит за 350ойро, а кто то китай с али за 20-40долл. тогда можно в премиум комплектации редуктор съёмный как у нск или бадеко)))
Денис52
прочиталось как ТриГада))) машинка по видео очч понравилась) и педаль беспроводная) торчащий ключ может мешать оперативно регулировать обороты. но владельцу ничего не мешает воткнуть туда гвоздь, а ключ под руками будет лежать)) провод стремноватый какой то, как у бабушкиного утюга. как вариант можно в версии «премиум» делать на блоке неск выходов под вторую бормашину и переключатель между ними)
Это просто авторская работа, так что говорить о версиях неуместно.
Провод в нейлоновой оплетке «змеиная кожа», очень мягкий и удобный, о чем собственно владелец и говорит. Втыкать гвоздь вместо ключа это верх глупости, уверен хозяин этого делать не станет, т.к., во-первых, это вопрос безопасности, во-вторых, потеряв ключ заменить его будет очень сложно и дорого, а в-третьих, ключ совершенно не мешает регулировке, т. к. находится на достаточном удалении. Всё продумано))
)))лучше двигатель с переходником под съёмные наконечники для микромотора. кто то наконечник нск купит за 350ойро, а кто то китай с али за 20-40долл. тогда можно в премиум комплектации редуктор съёмный как у нск или бадеко)))
Нет уж, этими трансформерами пущай занимаются нск с бадеками, как показывает их же практика компактными такие машинки не получаются, да и по возможностям не ахти. Для профессиональных сабуровских и кутзаловских фрез с хвостовиками 1/4″ ни нск, ни бодеко не могут предложить микромотор, тем более с трехкулачковым патроном, и уж тем более в таких компактных габаритах как Триада)
Надо на 2.35 делать машинку безколлекторную,с быстрозажимным патроном, что бы для граверов,в конкуренцию пневматики дорогой
Шибко дорого получается с маленькими машинками, готовых моторов нет, а переделывать оочень хлопотное занятие, + много возни с кинематикой.
Денис52
Денис, вопрос по поводу вашей крайней машинки для Олега. Спрашивал у него, но ответа не дождался. Там вы поставили патрон вместо цанги. Интересует — какой именно (где купить?) и насколько удалось решить вопрос с точностью зажима расходки. Насколько помню — вы вроде бы всегда предпочитали цанговые зажимы. Блок питания и педаль — супер!!!
С патроном отдельная тема, поскольку нужен был не просто патрон, а миниатюрный трехкулачковый Ф24-25мм и емкостью до 6.5мм.
Патрон взят от китайского наконечника под гибкий вал (желтого цвета) Точность у него так себе и гайка сильно люфтила, не представляю как им работать штатно. Поэтому далее началось шаманство, патрон разбирался устранялся люфт зубчатой гайки, чтобы вращалась плотно, кулачки подгонялись для точного зажима. Результат не гарантирован, но в моем случае все получилось, хотя один патрон я так и не смог довести до ума. Точность зажима получилась 0. 05-0.1 на 50мм.
Простоиван
Точность зажима получилась 0.05-0.1 на 50мм.
Вполне себе точность. Спасибо.
kirsan_kaifat
классно
Cudeyar
Хорошая вещь получилась
Денис52
Мини бормашина с бесколлекторным двигателем на базе быстрозажимного наконечника «Foredom» T/30 (h30)
бывший электрик
интересно
Денис52
В бормашине использован фирменный двигатель Tenshock серии Viper, модель VZ1030.
Халит
Денис52
Мини бормашина с бесколлекторным двигателем на базе быстрозажимного наконечника «Foredom» T/30
Ура-Ура!
Денис, прекрасная реализация!
Поздравляю.
Халит
и да, с Днем Рождения!
Желаю всяческих благ!
AAAAA
с ДР!))
K_V_E
С Днем Рождения.
Денис52
Большое спасибо, друзья 😊
Халит
Получил от Дениса это изделие «Мини бормашина с бесколлекторным двигателем на базе быстрозажимного наконечника «Foredom» T/30″.
Успел немного поработать машиной.
Отзыв исключительно положительный (это уже вторая машинка, выполненная Денисом с учетом моих пожеланий, так что опыт имеется).
Машина отлично сбалансированная, оперируется «письменным» хватом отлично, все манипуляции проводятся без напряжения кисти, вес машинки в районе 160 граммов, с учетом кабеля и разьема.
Установка и вынимание боров производятся удобно, никаких биений в ходе работы не появилось, ощущение монолитного инструмента.
Диапазон заявлен Денисом до 50 т.об., но наверху я машинку не крутил, вполне довольно было среднего показателя (20-25 т.об) для комфортной работы твердосплавными борами.
Приведу фото своего изделия, вся фактура на котором выполнена с помощью двух машинок от Дениса — цанговой с патроном ER11, большими борами, и новой, с патроном под боры 2,35 мм (материал рукояти — титан марки ВТ-06, после нанесения текстуры проведена пескоструйная обработка и оксидирование).
Еще раз благодарю Дениса за проделанную работу!
smesh
Подходит к концу процесс изготовления бормашины под руководством и с помощью Дениса. Двигатель 3968 инранер безколлекторник был приобретен у Дениса после его перемотки с kv 200 на звезде. Блок питания S-360-36, а также регулятор скорости приобретены на алиэкспрессе. Разъем РС19 нашел у работников завода «Прогрэс». Переключение между треугольником и звездой происходит переворотом ответной части разъема(выполнена проточка под ключ 180 градусов). Токарные работы выполнял у себя на работе. Спереди стоит подшипник SKF 6802, сзади поставил бывший родной передний(он побольше, чем был задний). патрон ЕР16, цанги пока купил 3,17мм, 6мм,8мм. Купил здесь на форуме две цанги твердосплавные 12,5мм из Пензы. Закаленную сталь CPM S125 по периметру бланка после конусной гидрорезки обтачивает нормально, обороты не падают как только не прижимал. Во общем подведу итоги: машинка получилась очень мощная, для моих нужд то что надо. Осталось дождаться проводов мягких,»змеинную шкурку» для оплетки, корпус для блока питания.
Пробный запуск:
На втором снимке обкатка с авиамодельным пропеллером.
smesh
Наконец то закончил проект по бормашине для своих хобийных дел. Двигатель электрический безколлекторный, перемотан на 35 вольт, мощность 500 ватт. Обороты регулируемые, причем, есть дополнительное переключение с треугольника на звезду и обратно переворотом разъема на 180 градусов. Есть переключение направления вращения. Цанговый патрон ER16, прикупил пока цанги 3,175мм, 6мм, 8мм, можно использовать цанги до 10мм. Крутящий момент не замерял, но на минимальных оборотах руками машину не остановить. Фото прилагаю, в дальнейшем планирую видео снять.
Денис52
Был у меня такой проект бормашины под названием «Богатырь», которая стала прототипом для бормашины Игоря. Вал у двигателя Ф8мм, поэтому без труда реализуется одновальная схема.
Переключение треугольник-звезда дает понижение оборотов в 1.73 раза, таким образом при питании 36В на звезде получается 6000об/мин., треугольником 10000об/мин.
Кр.момент очень большой на обоих режимах, а на 6т.об. просто дизель)
Фото бормашины Богатырь с трехкулачковым патроном до 8.5мм.
smesh
Добавил видео:
smesh
Сегодня замерял биение фрезы на расстоянии 30мм от патрона, получилось 0,07мм. Не знаю, много это или мало?
Денис52
Это приличная точность, повезло, берегите цанги.
По калёнке бор-фрезами не работают, для этого есть абразив. ВК8 и на токарном то с трудом калёнку берёт, а на скоростях бормашины это смерть фрезе.
Для переключения реверса не надо выключать БП, импульснику все эти переходные процессы не есть хорошо, переключайте на ходу, мотор плавно остановится и плавно начнет вращаться в обратную сторону.
Для работы по НЕ каленному металлу обороты для фрезы ставьте максимальные (в идеале вообще нужно 15-20т), и работать будет комфортнее и фреза дольше останется острой.
smesh
Да, фреза затупилась, оставлю ее для показухи, закажу еще пару штук, для дерева и пластика.
Тигирь
Тут многое от фазы луны зависит. Я как-то казанскими фрезами злющий японоподшипник обрабатывал. Несколько часов чистого машиновремени. Вопреки ожиданиям, фрезы остались живыми
Халит
Денис52
Был у меня такой проект бормашины под названием «Богатырь», которая стала прототипом для бормашины Игоря.
Переключение треугольник-звезда дает понижение оборотов в 1.73 раза, таким образом при питании 36В на звезде получается 6000об/мин., треугольником 10000об/мин.
Кр.момент очень большой на обоих режимах, а на 6т.об. просто дизель)
Фото бормашины Богатырь с трехкулачковым патроном до 8.5мм.
уже вполне приличный шпиндель для небольшого фрезера.
саид-ахмед10181948
на продажу делайте ?
Денис52
уже вполне приличный шпиндель для небольшого фрезера.
Вполне, 1-1.2квт при соответствующем исполнении можно снять.
на продажу делайте ?
Бывает делаю, но смотря что именно.
Cjhtynj
Денис52
В бормашине использован фирменный двигатель Tenshock серии Viper, модель VZ1030.
Денис52 как Вы реализуете состыковку шпинделя и вала мотора на этой машинке.
tomsonix
Привет!и сколько стоит сия бормашинка?
Денис52
Денис52 как Вы реализуете состыковку шпинделя и вала мотора на этой машинке.
На жесткой посадке, запресовке. По сути это единый цельный вал.
Но в отличии от предыдущих одновальных машинок эта квазиодновальная.
Привет!и сколько стоит сия бормашинка?
Не продается
Cjhtynj
[QUOTE]Изначально написано Денис52:
[B]
Но как тогда менять подшипники в двигателе? Они не вечные, да и нагрузка на них будет, Я так понимаю, что в шпиндельном подшипнике на наружней обойме упора нет.
Денис52
На этапе сборки/отладки я разбирал/собирал машинку два раза, проблем не возникало, подшипники снимаются спец.съемником. Это во-первых, во-вторых, машинка сделана достаточно добротно и расчетный ресурс таков, что на мой век точно хватит, я ведь тоже не вечный) Так что не переживайте, всё хорошо)
Cjhtynj
Денис52
На этапе сборки/отладки я разбирал/собирал машинку два раза, проблем не возникало, подшипники снимаются спец.съемником. Это во-первых, во-вторых, машинка сделана достаточно добротно и расчетный ресурс таков, что на мой век точно хватит, я ведь тоже не вечный) Так что не переживайте, всё хорошо)
Ни как не хотел, что то плохое сказать про Вашу продукцию, наоборот машинки очень понравились. Размеры и эстетика на высоте, просто хотел узнать про надёжность и конструктив, а то бывает с виду всё хорошо,а внутренности. ..
Денис52
Я ведь не крупный производитель, который в угоду прибыли оптимизирует затраты, экономит и т.п., я разрабатываю машинки преимущественно для себя, своих нужд или удовлетворения конструкторского аппетита. Поэтому стараюсь делать как положено для должной работы.
Халит
Как пользователь двух машинок от Дениса могу сказать — никаких проблем с эксплуатацией не возникает. Разбирать и лезть в работающий механизм не собираюсь и не считаю необходимым.
Cjhtynj
Денис52Вот так было бы удобней и симпатишней)
А вот эта машинка как устроена? Есть похожий моторчик, тоже хочется, что то такое сделать.
Cjhtynj
Cjhtynj
Денис52
Разбирать и лезть в работающий механизм не собираюсь и не считаю необходимым.
Золотые слова, спасибо, Владимир)
Как дела у маленькой, цанга нормально открывается, наконечник пластиковый не заменили?
А вот эта машинка как устроена?
Это не машинка, это «фотошоп», наложение картинок рукавного наконечника и коллекторного моторчика) Изначально выглядело так
https://i2.guns.ru/forums/icon…933/2933173.jpg
Я такого никогда не делал.
Cjhtynj
Денис52
Это не машинка, это «фотошоп», наложение картинок рукавного наконечника и коллекторного моторчика) Изначально выглядело так
https://i2.
Я такого никогда не делал.
Жаль, думал может мыслями поделитесь.
Халит
Денис52
Золотые слова, спасибо, Владимир)
Как дела у маленькой, цанга нормально открывается, наконечник пластиковый не заменили?
Денис, спасибо Вам.
Мелкий наконечник трудяга, работает. Все открывается-запирается, работает. Пластик пока не собрался сменить, это ж надо себя заставить…
Вот последнее по времени изделие, все резал с помощью вашей мелкой машины. Материал — титан.
Денис52
Денис, спасибо Вам.
Мелкий наконечник трудяга, работает. Все открывается-запирается, работает. Пластик пока не собрался сменить, это ж надо себя заставить…
Вот последнее по времени изделие, все резал с помощью вашей мелкой машины.
Всегда пожалуйста, вижу, что в правильных руках машинки, и как результат шикарные работы)
zegolan
Вдохновленный идеями Дениса, затеял постройку собственной бормашины на цанговом валу ER11. Хотел сделать одновальную конструкцию. Но при попытке вытащить вал из ротора — магнит треснул. Так что ротор на свалку. Заказал еще один мотор, такого же размера. С расчетом, что он послужит донором ротора. Но боюсь, что и новый сломается. Придется городить муфту или еще что-то для соединения вала ротора и цанги, а не хотелось бы
smesh
Купил себе тоже такой моторчик, но я сразу планирую переделать наконечник от китайского форидома через муфту. Машинка будет высокооборотистая не для силовых работ.Мотор 28 диаметра, напряжение до 40 вольт.
smesh
Вот такой купил:https://www.rcecho.com/RCS-Model-2865-5Y-1398KV-4-Poles-RC-Hobby-Car-Inrunner-Brushless-Motor-IM616.html
Денис52
zegolan
Вдохновленный идеями Дениса, затеял постройку собственной бормашины на цанговом валу ER11. Хотел сделать одновальную конструкцию. Но при попытке вытащить вал из ротора — магнит треснул. Так что ротор на свалку. Заказал еще один мотор, такого же размера. С расчетом, что он послужит донором ротора. Но боюсь, что и новый сломается. Придется городить муфту или еще что-то для соединения вала ротора и цанги, а не хотелось бы
Ротор можно склеить эпоксидкой и замотать кевларовой нитью (из магазина для рыболовов) или в крайнем случае тонкой шелковой/капроновой.
Это если зазор позволяет.
Вообще странно, что он у вас лопнул. Наверное перекос был когда выдавливали. Перед выдавливание вала хорошо бы погреть без фанатизма, до 60-70гр.
Какой размер мотора и конфигурация? Двухполюсный ротор?
Денис52
smesh
Машинка будет высокооборотистая не для силовых работ.Мотор 28 диаметра, напряжение до 40 вольт.
Эт вряд ли, мотор крупный, да еще 4х полюсный, в долговременном режиме 10-11т.об, кратковременно до 15т.об, а дальше печка будет. Питание ему нужно 8-11В не больше, КВ слишком высокое.
В моделизме эти моторы используются только с водяным охлаждением, даже принудительное воздушное не спасает. Собственно под эти цели моторы и наматываются, чтобы получить квт мощности.
smesh
Ну тогда буду искать перемотчика, под 35 вольт. я думаю на кв 800 надо мотать
Денис52
Ну тогда буду искать перемотчика, под 35 вольт. я думаю на кв 800 надо мотать
Ну что вы, на 35В даже не мечтайте.
Для этого мотора рабочая частота перемагничивания статора не более 350-370Гц, все что выше будет греться, вот и считайте комбинации кв и питания.
zegolan
Какой размер мотора и конфигурация? Двухполюсный ротор?
Конфигурация такая
Specifications
Model: KB28-47-26S
RPM/V: 1500
No-load Current (7.4V): 0.4A
Max. Amps: 15A
Resistance: 0.0996
Max. Volt(V): 20
Motor Diameter: 27.6mm
Motor Length: 47mm
Shaft Diameter: 3.17mm
Shaft Length: 12mm
Weight: 135g
Mounting Hole Size: M2.5, pitch 16mm, M3, pitch 19mm
Mounting Hole Depth: 4mm Max.
Да вот, собственно, ссылка на него
https://www.ebay.com/itm/RCS-M. ..=item3fabaffa 51
Ротор, к сожалению, восстановить не получится. После того, как он треснул, при попытке таки вытащить вал, он распался на несколько кусков. Вал в роторе держался за счет трения и клея
Выдавливал его я на вертикальном прессе. Нашел обрезок трубы подходяшего диаметра, поставил на нее ротор и потихоньку давил на вал. Он сначала сдвинулся на пару миллиметров, а потом ротор треснул
Мысль нагреть его тоже была, но побоялся что неодим утратит свои свойства от высокой температуры.
Сейчас жду доставки другого движка, такого же размера но попроще, более оборотистого. Мысль — вытащить их нового ротор и поставить его в старый. Но теперь уже не знаю, как вытаскивать из него вал. Боюсь и новый сломать. Придется, очевидно, городить муфту Но хочется все сделать как у вас, одновально. Думаю высверлить в валу цанги ER11 отверстие под диаметр вала ротора и соединить их. Если получится — сделать это отверстие под горячую посадку(на пару соток меньше диаметра вала ротора). А если не получится, то сделаю пару отверстий с резьбой сбоку и прижму винтами. Этакая муфта
smesh
Да, получается зря деньги на мотор потратил.
Денис52
Ну почему зря, на 10-11т.об. получится вполне компактная машинка, как Фазер или Триада.
donzava
Денис приветствую, есть хотелка написал в личку, если не тяжело- ответьте
с ув. Евгений
Денис52
Маленькая бормашинка-маркер под названием Калибри, диаметром 20мм и весом около 150гр хорошо подойдет для мелких работ различными борфрезами с размером хвостовиков 1.2 / 2 / 2.4 / 3 / 3. 2
Максимальная мощность бормашины 120Вт, обороты до 15т
Денис52
Маленькая бормашинка-маркер под названием Калибри, диаметром 20мм и весом около 150гр хорошо подойдет для мелких работ различными борфрезами с размером хвостовиков 1.2 / 2 / 2.4 / 3 / 3.2
Максимальная мощность бормашины 120Вт, обороты до 15т
optikov
Денис приветствую, прошу написать мне в личку на мой E-mail на яндекс jimnet, есть один вопрос. С ув.
aleksmar77
Какие интересные машинки делает Денис! нашел этот форум по наводке Дениса Боровика. Задал ему вопрос про регулятор для бесколлекторный машины из последних его видео, и он любезно отправил меня к Денису Горбунову и дал ссылку на этот форум. Пока еще не все просмотрел и не все перечитал, но уже очень интересно!
aleksmar77
alex-wolff
прикольно.
Тоже была мысля сделать прямой привод на кучу своих наконечников форедомовских, даже где то двигатель валяется, но чёто так и не дошло до реализации. вобщем однозначный респект.
Я собрал себе бормаштнку с форедомовским наконечником вот она
про гибкий вал и не вспоминаю больше. Очень мне нравится, хоть и тяжёлая вышла
Денис52
Сделал новую модель. Скоростная, до 22т.об., с цангами проксон.
Двигатель двухполюсный, не совсем обычный, статора не видно, все в обмотках.
Калёный
Чудные машинки на любой вкус.
dokavasia
Денис, у меня такой же наконечник. А можно ли использовать движок от блендера? Не пробовал? Есть у меня немецкий на 400 ватт. По размеру как раз для этого наконечника.
Халит
Как владелец и пользователь двух машин от Дениса могу только выразить уважение к его работе!
И хотел бы иметь третью! Она мне нужна «…под библиотеку!» (С)
Денис52
Денис, у меня такой же наконечник. А можно ли использовать движок от блендера? Не пробовал? Есть у меня немецкий на 400 ватт. По размеру как раз для этого наконечника.
Наверное можно, к чему только ни присабачивали эти наконечники.
Я не пробовал.
Я так считаю, чем соединять наконечники с чем попало и как попало, не думая ни об эргономике, не проводя никаких расчетов, уж лучше использовать родной привод, пусть и с гибким валом. Это точно будет не хуже, там хотя бы производитель подумал и все просчитал за пользователя.
Денис52
Как владелец и пользователь двух машин от Дениса могу только выразить уважение к его работе!
И хотел бы иметь третью! Она мне нужна «…под библиотеку!» (С)
Спасибо, Владимир! Ваши работы заслуживают ничуть не меньшего уважения и интереса.
С бормашинками я как бы подзавязал, но когда вдруг возникают интересные идеи, то берусь за реализацию. Машинка выше, тому пример, новый двигатель, новые возможности.
Халит
Да, очень интересная машина получилась, обороты, как это принято сейчас говорить,- огонь. И компактная. Под конкретного заказчика выполнялось?
Денис52
Да, резчик по дереву заказал. Долго не получалось сделать такую машинку, но вдруг, случайно, нашелся мотор с подходящими характеристиками.
Халит
Ясно.
Как обычно — заслуживающая уважения работа.
Я чуть позже, возможно, обращусь к вам за советом.
Купил я тут себе в мастерскую очередную «игрушку» — советский станок-пантограф 6464. Еще не устанавливал внутрь и не запускал. На текущий момент не понятно — возможно ли использовать стандартную схему привода шпинделя через ремни, или проще докупить электрический шпиндель и его поставить вместо стокового…
Денис52
Ух ты, интересный агрегат. Видел как-то вживую нечто подобное, модель не знаю, но было очень интересно наблюдать за его работой)
Бесколлекторный мотор своими руками с помощью спиннера
Так же, как повальное увлечение Pokémon Go из ниоткуда, спиннеры стали популярными, и стало более популярно крутить один из них между пальцами. Но в последнее время людям (включая меня) в конце концов это наскучило, и поэтому в этом проекте давайте добавим новую цель для спиннера , создав простой мотор с использованием Fidget Spinner . С помощью этой схемы вы сможете заставить вертушку вечно вращаться с помощью элементарной физики и не беспокоиться о том, что она простаивает в каком-то углу вашей комнаты. Вы также изучите основы как работает бесщеточный двигатель постоянного тока поскольку концепция, которую мы здесь используем, такая же, как и в знаменитых двигателях BLDC . Звучит достаточно интересно??? Приступим…
Необходимые материалы:
- Спиннер Fidget Spinner
- Электромагнит 12 В
- Неодимовые магниты
- Адаптер постоянного тока 12 В
- 7805 Регулятор напряжения
- 1N4007 Диод
- Резисторы (1K и 10K)
- Светодиод
- Датчик Холла (US1881)
- Соединительные провода
- Макет
- Устройство для крепления спиннера и электромагнита
Как заставить Fidget Spinner вращаться бесконечно?
Этот проект прост и легок в реализации, если вы понимаете принцип его работы, который мы сейчас обсудим. Итак, как мы уже говорили ранее, мы собираемся использовать ту же концепцию, которая используется в двигателях BLDC. Двигатели постоянного тока очень известны и находят свое жизненно важное применение в дронах, радиоуправляемых машинах и, главным образом, в электромобилях. В этих двигателях используются датчики Холла вместо обычных щеток, отсюда и культовое название «Бесщеточный двигатель постоянного тока». Я не хочу слишком углубляться в его работу, но здесь я кратко объясняю , как работает двигатель BLDC . В двигателе BLDC (ступичного типа) статор будет иметь обмотки, образующие электромагнит, а ротор будет иметь постоянные магниты. Датчик, называемый датчиком Холла, используется для определения полярности магнита, противоположной электромагниту, и использует эту информацию для запуска электромагнита с той же полярностью. Как мы знаем, подобные полюса отталкиваются, и, следовательно, электромагнит будет отталкивать постоянный магнит, заставляя его вращаться. Эта последовательность будет повторяться, и датчик Холла будет считывать полярность магнитов и запускать электромагнит упорядоченным образом, чтобы поддерживать вращение ротора.
Теперь перейдем к нашему проекту Превращение вертушки в бесколлекторный двигатель . Здесь прядильщиком является Ротор. Поскольку у обычного прядильщика нет магнита, нам пришлось бы прикрепить магниты к прядильщику. Убедитесь, что вы используете только неодимовые магниты , а также убедитесь, что все магниты обращены вверх или имеют один и тот же полюс. Вы можете сделать это, используя другой магнит, у моего спиннера на конце была металлическая деталь, поэтому было легко приклеить магниты, и это выглядело так, как показано ниже. Я также снял центральный кожух, чтобы обнажить шарикоподшипник.
Ротор теперь готов с магнитами , теперь нам нужен электромагнит, который нужно поместить прямо под путь магнитов, чтобы мы могли отталкивать магниты. У меня электромагнит на 12 В, запитайте свой и поднесите его ко всем своим магнитам, чтобы убедиться, что они колеблются друг от друга. Теперь нам нужно определить, когда магнит окажется над электромагнитом, и только тогда запустить его. После того, как магнит начнет колебаться, мы должны выключить электромагнит, чтобы спиннер мог свободно вращаться, и снова включить электромагнит, когда над ним появятся неодимовые магниты, и таким образом вы получите спиннер, который вращается при каждом обнаружении. Это обнаружение и запуск могут быть достигнуты с помощью приведенной ниже схемы.
Принципиальная схема и объяснение:
Полная электрическая схема для Fidget Spinner Motor Project приведена ниже, ответственность каждого компонента в цепи поясняется далее.
Адаптер постоянного тока 12 В: Необходимость в 12 В в этом проекте заключается в том, что электромагнит работает только с 12 В. Он также потребляет ток около 330 мА, поэтому в качестве источника питания я выбрал адаптер постоянного тока 12 В 1 А.
7805 Регулятор напряжения: Источником для этого проекта является 12 В, но нам нужны регулируемые 5 В для датчика Холла и модуля L293D, поэтому мы используем 7805 для преобразования 12 В в 5 В.
Драйвер двигателя L293D: Как было сказано ранее, мы должны быстро включать и выключать электромагнит в зависимости от положения магнита на спиннере. L293D обычно используется для управления двигателями, но его также можно использовать в нашем приложении для управления электромагнитом. Он получает данные от датчика Холла и на основе этих данных включает или выключает электромагнит. Мы будем использовать только один электромагнит, поэтому другая секция остается свободной.
Датчик Холла: Датчик Холла используется для проверки того, находится ли магнит непосредственно над электромагнитом, и только если он там, он подает питание на электромагнит через L293D; иначе электромагнит останется выключенным. Узнайте больше о датчике Холла и его взаимодействии с Arduino.
Резистор 10 кОм: Резистор 10 кОм используется для подачи высокого уровня на выходной контакт датчика Холла, этот резистор является обязательным, иначе выходной контакт датчика останется плавающим.
Резистор 1K и светодиод: Резистор в сочетании со светодиодом используется для индикации того, обнаруживает ли датчик Холла магнит или нет. Если магнит обнаружен, светодиод выключится, иначе он останется включенным. Вы можете проверить эту работу в видео ниже.
Диод: Диод — это просто диод свободного хода, который защищает L293D от обратного тока электромагнита из-за его индуктивной природы. Необязательно использовать это, если вы тестируете его на короткое время.
Конденсаторы (C1 и C2): Конденсаторы C1 и C2 являются сглаживающими конденсаторами, пропускающими через себя только чистый постоянный ток, поскольку они пропускают переменный ток через землю. Эти конденсаторы также не являются обязательными.
Когда вы закончите со своей схемой , поместите датчик Холла немного выше электромагнита , а затем поместите спиннер над электромагнитом, сохраняя минимальный воздушный зазор. Я использовал болт с резьбой и гайку, чтобы сделать необходимое расположение, вы можете использовать свой собственный метод. Мой выглядит примерно так, как показано ниже.
Let’s Spin The Fidget Spinner:
Когда вы закончите со схемой и разместите спиннер, как показано выше, пришло время увидеть ваш спиннер в виде BLCD Motor . Просто дайте спиннеру первый толчок, и он будет вращаться вечно, как показано в видео ниже.
Если он не работает должным образом, используйте светодиод в цепи, чтобы проверить, работает ли датчик Холла, а также проверьте, правильно ли подается и обесточивается электромагнит. Также убедитесь, что правая сторона датчика Холла обращена вверх, а магниты имеют ту же полярность, что и описанная выше. Скорость спиннера зависит от положения датчика холла и расстояния воздушного зазора. Вы можете поэкспериментировать с датчиком Холла и проверить, в каком положении вы получаете максимальную скорость.
Надеюсь, вы поняли проект и вам понравилось создавать нечто подобное. Если у вас возникли проблемы с получением этой работы, используйте раздел комментариев, чтобы опубликовать свою проблему, или используйте форум для получения дополнительной технической помощи. Оставайтесь творческими, и мы встретимся в следующем проекте, а пока счастливого вращения.
Как работают бесщеточный двигатель и ESC
В этом уроке мы узнаем, как работают бесщеточный двигатель и ESC. Эта статья является первой частью следующего видео, где мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части мы узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Как это работает
Двигатель постоянного тока BLDC состоит из двух основных частей: статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если подать ток через катушку, она создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
Итак, если мы применим соответствующий ток, катушка создаст магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы будем активировать каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
Чтобы повысить КПД двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
С этой конфигурацией мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, необходимо шесть шагов или интервалов.
Если мы посмотрим на форму сигнала тока, то увидим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена. Это дает представление о том, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному напряжению постоянного тока с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации мы фактически имеем соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
Итак, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два МОП-транзистора в каждом из 6 интервалов, и это то, для чего на самом деле предназначены ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесщеточного двигателя, активируя соответствующие МОП-транзисторы для создания вращающегося магнитного поля, чтобы двигатель вращался. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда какую фазу активировать. Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных под углом 120 или 60 градусов друг к другу.
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и регуляторов скорости, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
Хорошо, достаточно теории, а теперь давайте продемонстрируем и посмотрим на жизнь то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем заметить, это три синусоиды. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Мы видим, что при изменении оборотов двигателя частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Здесь я хотел бы поблагодарить Banggood.com за предоставление мне этого осциллографа. Это Rigol DS1054Z, и это один из лучших осциллографов начального уровня в своей ценовой категории. Он имеет четыре входных канала, полосу пропускания 50 МГц, которая может быть изменена до 100 МГц, частоту дискретизации 1 Гвыб/с и относительно большую глубину памяти 24 Мб.
Дисплей 7 дюймов, очень красивый и яркий. Он имеет различные математические функции, фильтры нижних и верхних частот, декодирование SPI и I2C и многое другое. Итак, еще раз большое спасибо Banggood.com и убедитесь, что вы проверили этот осциллограф в их магазине.
Тем не менее, это основной принцип работы бесколлекторного двигателя. Если вам нужны еще реальные живые примеры и вы научились управлять бесколлекторными двигателями с помощью Arduino, вам следует ознакомиться со второй частью этого руководства.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Как сделать бесколлекторный двигатель своими руками — наука/технология
| Добро пожаловать, Гость : Зарегистрируйтесь на Nairaland / ВХОД! / Актуальные / Недавние / Новые Статистика: 2 932 691 член, 7 092 917 тем. Дата : четверг, 29 сентября 2022 г., 05:08 |
Nairaland Forum / Наука/Технологии / Как сделать своими руками бесколлекторный двигатель (1923 просмотров)
Как сделать горящую лазерную указку из предметов домашнего обихода (сделай сам) ) / Как перемотать бесщеточный двигатель (v-man Innovation) / как сделать щеточный двигатель бесколлекторным от Igwevictor (2) (3) (4)
(1) ( Reply ) ( Go Down )
| How To Make Diy Brushless Motor by victorigwe: 6:23pm On Jun 05 , 2017 |
| Привет! Я расскажу вам, как сделать свой собственный бесщеточный двигатель своими руками, это просто, вы видите, что здесь, в Нигерии, бесщеточный двигатель стоит 4600 найра, и я хочу сделать радиоуправляемый вертолет или квадрокоптер даже самолетом, и вам нужна настройка за ваши деньги, здесь это выход, сделать любой kv самостоятельно, следуя советам или шагам, которые вы узнаете, как сделать свой собственный.
|
| Re: Как сделать DIY безмолвного мотора от Victorigwe: 18:39 на июня 05 , 2017 |
| Re: Как сделать бесколлекторный двигатель своими руками by victorigwe: 18:50 On Jun 05 , 2017 |
| шаг 1 ромов катушку
|
| Re: How To Make Diy Brushless Motor by victorigwe: 10:04pm On Jun 05 , 2017 |
| step 3: coilling возьмите толстую медную проволоку и намотайте ее таким образом, как показано на рисунке.
|
| Re: How To Make Diy Brushless Motor by victorigwe: 10:15pm On Jun 05 , 2017 |
| my is 47 turn calculate it by амитура. |
| Re: Как сделать бесколлекторный мотор своими руками0217 22:29 On 05 июня , 2017 |
| шаг 5; держатель подставки
|
| Re: How To Make Diy Brushless Motor by victorigwe: 10:34pm On Jun 05 , 2017 |
| step 7 : install it
|
| Re: How To Make Diy Brushless Motor by victorigwe: 10:41pm On Jun 05 , 2017 |
| step 8: glue back the brushless Заменяю вал на длинный, проклеиваю обратно резинкой Eposy.
|
| Re: Как сделать бесколлекторный мотор своими руками by victorigwe: 22:44 On 05 июня , 2017 | 9
| Re: Как сделать DIY безмолвного двигателя от Victorigwe: 22:48 на июня 05 , 2017 |
| Re: Как сделать бесколлекторный мотор своими руками by victorigwe: 22:58 On 05 июня , 2017 |
| шаг 11 тест
|
| Re: Как сделать бесколлекторный двигатель своими руками by victorigwe: 23:11 от июня 05 , 2017 |
| Видео |
(1) ( Ответ
9000 2. Теперь здесь! / Сравнение тарифов Talktoomuch™ и Skype на звонки!( Go Up )
| Разделы: политика (1) бизнес автомобили (1) работа (1) карьера образование (1) романтика компьютеры телефоны путешествия спорт мода здоровье религия знаменитости тв-фильмы музыка-радио литература веб-мастера программирование techmarket Ссылки: (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) Nairaland — Copyright © 2005 — 2022 Oluwaseun Osewa. Все права защищены. См. Как рекламировать. 38 |
Самодельный бесщеточный шпиндель
20-09-2011 #1
Ив добавил еще один самодельный бесщеточный шпиндель в мою растущую коллекцию и решил опубликовать свои приключения на тот случай, если кто-то ищет на рынке тихий шпиндель с низким крутящим моментом для резки пластика и алюминия на фрезерном станке. Мой большой шпиндель ER11 оказался первоклассным. рабочая лошадка, которую я использую в 90% случаев, она подвергалась жестокому обращению даже однажды, прорезав два 30-миллиметровых отверстия через 20-миллиметровый алюминий
с помощью кольцевой пилы .Иногда я обнаруживал, что цанговые патроны ER11 ограничивают выбор инструмента, т.е. фрезы типа «ласточкин хвост» / Т-образные пазы, резьбовые фрезы и оправки для продольных пил, как правило, имеют диаметр вала больше, чем у ER11, вместимость 7 мм
Мне удалось приобрести себе цанговый вал ER20 C10 ооооооооооооооооооо…. Я надеюсь повторить успех первый шпиндель с несколькими незначительными модификациями и ER20 (до 13 мм)
его все еще очень простая конструкция, оригинал имеет один двухрядный радиально-упорный подшипник 3200 в носовой части, этот будет иметь два двухрядных радиально-упорных контакта 3200 примерно на 10 мм друг от друга в носовой части, и это должно остановить передачу любого стандартного люфта подшипника двигателя на конец инструмента …. на самом деле я не могу себе представить, плохо вижу разницу, поскольку шпиндель MK 1 работает довольно хорошо, но я мог бы также, теория есть и подшипники дешевые 🙂
меня поражает, что больше людей не строили шпиндель такого типа, но я думаю, что большинство из вас режет дерево, но для тех, кто режет пластик и алюминий на фрезерном станке, они имеют большой смысл
этот я использую на 12 В 350 Вт источник питания и получить 2800 об / мин, и он поддерживает достаточный крутящий момент на средних сотнях (об / мин), чтобы справиться со всем, что на него бросают .
Карбид 6 мм с 4 зубьями — это мой предел при резке алюминия, а с фрезой с радиусом 60 мм я плохо получаю резонансные узоры по ветру любых отверстий, через которые я прохожу, если только я не буду очень легко
(э-э-э-э… если что-то из этого делает17:50 100A Контроллер скорости бесколлекторного двигателя RC BEC ESC (убедитесь, что у вас есть версия BEC любого контроллера скорости, так как она устраняет необходимость в подаче питания 5 В на ваш сервотестер/контроллер)
17:09 C10 ER20 100L цанговый патрон с ЧПУ, удлинительный хвостовик 9на ebay на 16:60 есть писк, так как чипы поставляются
«Outrunner Motor C6364 KV230 Brushless for RC Airplane»
, но тот, который я получил, был очень плохо сбалансирован, раструб был не так, как у
на градус или около того, и я не хотел беспокоить свою задницу, пытаясь исправить это)86:59 (приблизительно) + немного смазки для локтей пару кусков аллила и блок питания 12 В
чтобы получить второй карманный квадрат с первым я вырезал его под размер установил первый подшипник и ER20 зажимной патрон и поместил всю сборку в планку и снял последние 0,5 мм с помощью небольшого сверлильного инструмента, затем снял наружную часть корпуса до 43 мм.
Приспособление 4597Приспособление 4596
удаление существующий вал шпинделя может быть проблемой, но этот вышел довольно легко
обрежьте одну из выемок подшипника до запрессовки, и вы сможете разобрать
шпиндель и выровнять вторую выемку подшипника до почти идеального совмещения чтобы сделать его совместимым с моим существующим зажимом шпинделя, и это не обязательно (это поможет сохранить дерьмо, хотя и выглядит шикарно)
деталь, собранная снова, чтобы снять, где корпус подшипника сидит, до плотной правильной посадки
сервоконтроллер и 100A ESP
почти закончены…. просто нужно немного сверлить и нарезать резьбу, чтобы зафиксировать корпус подшипника на ацеталевом креплении, и они были сняты фетиш для этих бесколлекторных моторов 😈
синий мотор самый «дешевый» с сильно разбалансированным колоколом, также в спешке, чтобы закончить его, мне удалось снять слишком много материала с корпуса подшипника и пришлось используйте алюминиевую ленту, чтобы проложить его, чтобы он подходил к моему зажиму, хотя я видел пару узких мест, и теперь он будет списан как запасноймаленький будет разгоняться до теоретических 48000 об/мин на 12В, но я не вижу, чтобы подшипники долго работали на такой скорости, я продолжаю осмелиться испытать его до разрушения, но я просто не могу заставить себя сделать это, и я справляюсь с этим.
, желтый будет работать до 10000 об/мин, и я обычно использую его для заточки инструментов
пример некоторых работ, выполняемых с этими шпинделями … я люблю резать ацеталь и люблю фрезеровать резьбу M3 в ацетале, если что-то пойдет не так, вы, как правило, не ломаете инструмент….
Фрезерование резьбы должно быть классифицировано как экстремальный вид спорта …. это ОЧЕНЬ увлекательно … или это только мне грустно ?
Последний раз редактировалось Blackburn Mark; 20-09-2011 в 17:23.
‘Fly Electric’ — Самодельные моторы
‘Fly Electric’ — Самодельные моторы
В конце 2000 года Кристиан Лукас, Людвиг Ретцбах и Эмиль Кюрфус опубликовали в немецком журнале elektroModell проект самодельного бесколлекторного двигателя. Хотя коммерческие бесколлекторные «аутраннеры» уже несколько лет были доступны в Европе (например, Actro), эти ребята продемонстрировали, как любой, у кого есть токарный станок, может сделать эти двигатели самостоятельно. Этот тип двигателя теперь стал известен как «LRK» по их именам.
С тех пор все изменилось, и революция «CD-Rom» наступила. Внезапно стало возможным ограбить ваш старый компьютер на детали, чтобы сделать невероятно мощные моторы, часто даже без токарного станка. Это поразило мое воображение. Благодаря усилиям GoBrushless.com новые компоненты стали легко доступны, и началось производство…
У меня есть несколько страниц на этом сайте для демонстрации этой технологии. На этой странице я перечисляю некоторые из моих наиболее успешных двигателей, и вы можете найти ссылки на более конкретные страницы ниже. Хотя двигатели CDRom довольно легко изготовить, расширение до больших размеров может быть довольно сложным из-за сложности обработки. Освоив их, я теперь могу строить любые размеры, точно настраивать их в соответствии с моделью и легко чинить, когда они ломаются. Я получаю огромное удовольствие от полета на собственном моторе и теперь не повернул бы назад. Дискуссионная группа LRK является хорошим ресурсом для получения дополнительной информации.
* Электродвигатели для компакт-дисков (легкие)
* Моторы Crocodile (высокий КПД)
* Советы по обработке (точная обработка)
* Плотность намотки (расширенный совет)
* Балансировка двигателей (расширенный совет)
* Фрезерный станок (самодельная мельница из сверла)
Двигатели «Крокодил»
В рамках проекта «Крокодил» были созданы двигатели с очень высоким КПД с использованием специального 40-мм статора. Мой первый имеет толщину 10 мм и весит 168 г (6 унций). Он превращает 11×7 при 7000 в 3 липосакции при 30А и на 40% эффективнее, чем Astro 15G. Мой второй имеет статор 20 мм и на 75% эффективнее, чем Astro 40G, и равен Actro 40-5 с винтом 16×8, вращающим 7000 об / мин при 1300 Вт. Подробнее здесь.
|
|
Мотор «Floppy Drive» мощностью 400 Вт
Это мой самый мощный мотор на сегодняшний день (хотя и не такой эффективный, как моторы ditto и croc). Он вращает винт 9×5 со скоростью около 10 000 об/мин. Он потребляет 35 А от 3 LiPoly. Он весит всего 138 г (4,9 унции). Он легче, чем слабый Speed 500 (153 г/5,4 унции), и мощнее, чем редукторный Astro 15, который весит почти в два раза больше (248 г/8,7 унции). Впечатленный?
|
Готовый двигатель |
Большинство бит для моего первого мотора флоппи-дисковода |
Двигатель «То же самое» мощностью 250 Вт
Насыщение железа в статоре происходит довольно редко, но может произойти с гибкими статорами (из-за их большого диаметра и относительно длинных и тонких зубьев). Лучшим выбором для более крупных двигателей являются статоры от приводов Iomega Ditto и других «ленточных стримеров». У них часто 18 довольно коротких зубьев, что делает двигатель очень крутящим. У некоторых 9или 12 зубов. Вы можете купить их всего за 99 пенсов на ebay.
Ральф Окон — «мистер Дитто», и его сайт — выдающаяся демонстрация того, чего можно достичь. Мой лучший результат с этими статорами на данный момент — это двигатель, который вращает 11×7 при 6700 об / мин и потребляет 26 А от 3 Lipo. Он имеет такую же тягу, что и вышеупомянутый двигатель, с 2/3 тока. Хороший!
Я использовал два статора с 18 зубьями (10×36,5 мм) и двадцать магнитов 3x5x10 мм. Я обнаружил, что магниты толщиной 3 мм потребляют на 13,5% меньше тока, чем магниты толщиной 2 мм, почти без потери скорости вращения.
|
Мотор на Speedy Bee |
Экспериментальная обмотка |
Двойной двигатель CD/S400 для банок
Аналогичен серии Axi 2208. Он превращает APCe 8×6 со скоростью около 9000 об/мин, потребляя менее 9 А от 3 LiPoly. Он идеально подходит для моего 36-дюймового «Спитфайра», поэтому я пока не стал его улучшать. 0011
Два статора GB 22,7 мм образуют сердечник с 14 витками двухжильного провода диаметром 0,375 мм, звезда. Умная часть (это не моя идея) — это банка, сделанная из корпуса Speed 400. Это намного проще создать, чем сделать колокол с нуля. Он также очень легкий, что требует меньшей точности. Это, в свою очередь, работает более плавно и приводит к меньшему количеству проблем с балансировкой / резонансом, которые могут быть проблемой с роторами DIY.
Я начал с 24 магнитов 1x5x5 мм в 12-полюсной конфигурации, но теперь использую 12 магнитов 1,2x5x10 мм. Это уменьшило воздушный зазор с 0,56 мм до 0,36 мм и упростило установку. Я читал о людях, использующих магниты толщиной 1,5 мм, но я думал, что воздушный зазор 0,15 мм будет менее щадящим.
Несмотря на то, что банка на основе Speed 400 очень проста в изготовлении, я был обеспокоен тем, что тонкая толщина стенок отрицательно скажется на эффективности. Из измерений с самодельным датчиком на эффекте Холла было ясно, что через стороны уходит значительный поток. Поэтому я сделал свой собственный колокол с гораздо более толстыми стенками. Я не могу провести прямое сравнение, потому что я использовал магниты толщиной 2 мм. Более высокий поток приводит к более низким оборотам, поэтому 8000, измеренные при 7А, не стали неожиданностью. Я ожидаю, что если я оптимизирую обмотки для «правильного» звонка с 2-миллиметровыми магнитами, он будет работать лучше, чем более простая версия Speed 400. Однако пока выигрывала простота конструкции последнего!
|
Скорость 400 может двигатель |
Самодельный звонок с магнитами 2 мм против банки Speed 400 |
«Стандартный» двигатель для компакт-дисков
Если существует такая вещь, как стандартный двигатель для компакт-дисков, то это один статор диаметром 22 мм, стандартный колокол, 12 магнитов размером 1x5x5 мм и 20 витков. Я использую статор GB 22,7мм и 23 витка провода 0,45мм, звезда. Это дает примерно такую же мощность, как Speed 400 с редуктором, при 1/3 веса и почти вдвое меньшем токе. Неплохо! Взгляните на мою страницу двигателей CD-Rom для более подробной информации.
|
«Пустой» сердечник плюс готовый мотор |
Как начинается обмотка |
Замена Speed 400 для быстрых моделей
Стандартный двигатель CDRom может иметь 6 полюсов вместо 12. Это дает двигатель, который будет вращать небольшой пластиковый винт Gunther (5×4,3) на более высоких оборотах, чем хороший Speed 400. Статическое потребление тока может быть немного выше (13-14 А), но это приводит к большей скорости и более длительному полету. быстрая модель. Я использую стандартные пакеты 8xAr800, которые я всегда использовал на 400-х. В дополнение к преимуществам производительности и продолжительности работы, двигатель весит в три раза меньше. См. мою страницу двигателей CD-Rom для более подробной информации.
|
Основные компоненты с парой тестовых банок |
Некоторые из вариантов магнита пробовал |
Дополнительная информация (те же ссылки, что и выше):
* Моторы CD-Rom (легкие)
* Моторы Crocodile (высокий КПД)
* Советы по обработке (точная обработка)
* Плотность намотки (расширенный совет)
* Балансировка двигателей (расширенный совет)
* Фрезерный станок (фреза своими руками из дрели)
Начало страницы
Нажмите на ссылки выше для получения дополнительной информации.
Нажмите на ссылки ниже, чтобы перейти на другие страницы.
Дом
Искусство возможного
Отсутствие материи
Ссылки
Обновления
Эл. адрес
КАРТА САЙТА
10 простых и креативных проектов своими руками с использованием электродвигателя
Хотите ли вы найти хорошее применение мотору, стоящему в вашем гараже, или помогаете своему ребенку с его научным проектом, вот десять творческих и недорогих проектов «сделай сам», которые можно сделать с помощью мотора.
1. Автоматическая кормушка для кошек
Устали от того, что кошка требует еды в нерабочее время? Эта самодельная автоматическая кормушка изменит правила игры. Он выдает корм вовремя и в нужном количестве, поэтому ваша кошка получает здоровое питание независимо от того, находитесь ли вы рядом. Это удивительно легко и доступно сделать.
Он использует Arduino в качестве мозга, контейнер в качестве держателя для еды и серводвигатель, который вращается для управления открытием и закрытием крышки контейнера, поэтому еда высвобождается. Чтобы настроить его, запрограммируйте Arduino на раздачу еды в желаемые часы и в определенном количестве, а затем спроектируйте кормушку. Вы можете спроектировать его так, как хотите, если расположите серводвигатель под углом поворота.
Связанный: Отличные проекты Arduino для начинающих
2. Авто Тиндер
Этот проект «сделай сам» с использованием мотора берет на себя всю тяжелую работу, заключающуюся в том, чтобы назначить свидание в tinder, проводя пальцем по экрану. Распечатайте автоматический трут-пальец (любой дизайн, который вы сочтете подходящим), соедините детали, протестируйте и соберите все это.
Вам понадобится Arduino (UNO), шаговый двигатель, стилус для сенсорного экрана и палец, который можно распечатать на 3D-принтере. Если вы не можете получить доступ к машине для 3D-печати, пересадите силиконовый палец и вместо этого прикрепите его к двигателю.
3. Машинка на радиоуправлении с Arduino
Владеть радиоуправляемой машинкой еще веселее, когда ее создал ты. Сначала вам нужно разобрать настоящую радиоуправляемую машину с аккумулятором, чтобы понять, как все работает и куда девается.
Как только вы это поймете, переходите к следующему шагу и удалите все детали, оставив нетронутыми только аккумулятор и двигатель. Аккумулятор остается неповрежденным, чтобы питать оригинальный двигатель постоянного тока и облегчать вашу работу.
Замените оригинальный электрический модуль автомобиля на Arduino Uno, а приемник на модуль HC-06 для лучшего дистанционного управления. Наконец, подключите 9-вольтовую батарею к устройству через VIN для питания Arduino.
Связанный: Что вам нужно для создания собственного автономного робота
4. Робот следящего за линией
Для этого творческого проекта вам понадобится шасси с двигателем и колесами для корпуса, Arduino Uno для управления работой робота, переключатель, датчики приближения, моторный щит L293D, провода-перемычки и держатель батареи.
Прикрепите моторный шилд L293D к Arduino и подсоедините его к шасси. Сделайте то же самое и для других частей, запустите код Arduino, и ваш робот точно определит и будет следовать по заранее определенным линиям.
5. Самоиграющая Мелодика
Эта самовоспроизводящаяся мелодия прослушивает загруженные фрагменты мелодии и пытается воспроизвести звук в режиме реального времени. Как и в большинстве творческих проектов «сделай сам» с использованием двигателя, Arduino является мозгом проекта. Он управляет двигателем постоянного тока, электроклапаном и позволяет самоиграющей мелодике получать и обрабатывать управляющие значения.
Вам понадобится Arduino Nano R3, резистор 1 кОм, два драйвера двигателя (L928), кнопочный переключатель, источник питания 12 В 5 А, регулятор напряжения, соленоид и двигатель постоянного тока 12 В с энкодером.
6. Мини-робот-пожарный
Мини-робот-пожарный не просто поможет вашим старым моторам; он также способен обнаруживать, приближаться и даже тушить пожар. Он работает на Arduino, но обнаруживает возгорание через сенсорный модуль.
После обнаружения двигатели движутся к огню через модуль L293D, и робот тушит его, разбрызгивая воду из небольшого контейнера с насосом. Прямо под контейнером находится серводвигатель для управления распылением воды.
Вам понадобится Arduino Uno, три пожарных датчика, серводвигатель SG90, модуль драйвера двигателя L293D, погружной насос 5 В, крошечная макетная плата, двухмоторное шасси робота с двумя колесами, небольшая банка и соединительные провода. Эти предметы легко найти, и они столь же доступны по цене.
7. Разыграли! Передвижная коробка для салфеток
Если вы хотите отомстить тому, кто вас разыграл, или хотите напугать своего друга, эта движущаяся коробка для салфеток обязательно их достанет. Все, что вам нужно, это радиоуправляемая машинка (вы можете сделать свою, как описано выше), коробка из папиросной бумаги обычного размера и ножницы. Подготовьте коробку, вытащив все ткани и обрезав ее дно.
Поместите машинку на радиоуправлении в коробку и, если возможно, закрепите ее скотчем для устойчивости. Добавьте примерно треть салфеток, которые вы удалили ранее, положите их на стол и передвигайте коробку всякий раз, когда кто-то прикасается к ней, чтобы напугать их.
8. Часы от первого лица
Замените свои старые настенные часы, используя мотор, чтобы сделать крутые часы от первого лица для вашего дома. Он показывает время на постоянно обновляемом движущемся дисплее. Как и в большинстве творческих проектов «сделай сам» с использованием мотора из нашего списка, его легко сделать, и вам также понадобится Arduino (Nano R3).
Другие компоненты, которые вам понадобятся, включают печатную плату, стандартные светодиоды, резисторы на 220 Ом, батарею 9 В, двигатель постоянного тока и импульсный стабилизатор. Чтобы сделать это, сначала соберите светодиоды на печатной плате (вы можете использовать светодиоды разных цветов для лучшего эффекта), а затем припаяйте резисторы.
Резистор помогает защитить светодиоды от высокого напряжения. Затем подключите импульсный регулятор для преобразования тока и подключите 9-вольтовую батарею, чтобы завершить настройку. Наконец, подключите Arduino к компьютеру и запустите код, чтобы часы заработали.0011
9. Открывалка потайной двери
Если вы постоянно теряете ключи, этот потайной дверной замок — идеальный способ найти хорошее применение вашему старому мотору и полностью избавиться от ключей. Вам понадобится Arduino UNO, шаговый двигатель и драйвер шагового двигателя, зуммер, емкостный датчик, адаптер 12 В, перемычки и монтажная лента.
Когда все будет готово, с помощью мультиметра найдите проводящую поверхность для системы. Хорошие места для проверки включают дверную ручку, замочную скважину и глазок. Соедините все части вместе с помощью перемычек.
Найдите место рядом с электрической розеткой для адаптера на 12 В, установите систему, подключите ее и вуаля! Ваш секретный открыватель двери будет готов.
Ознакомьтесь с пошаговым руководством по выполнению этого проекта.
10. Колесо обозрения с функцией распознавания лиц
Этот проект требует определенных усилий, но результат стоит каждой потраченной на него секунды. Как следует из названия, это колесо обозрения с возможностью распознавания лиц. Итак, вам понадобится; Комплект колеса обозрения Lego, Arduino, L29Модуль 3D-драйвера, двигатель постоянного тока с высоким крутящим моментом, макетная плата, Raspberry Pi Zero и модуль камеры Raspberry Pi.
Во-первых, настройте код, чтобы двигатель вращался, и соберите L293D, чтобы управлять им. Затем подключите двигатель к колесу обозрения, чтобы оно вращалось.
