Как работает драйвер шагового двигателя. Какие бывают типы драйверов. Как выбрать напряжение и ток для шагового двигателя. Как собрать простой драйвер своими руками. Какие микросхемы используются в современных драйверах.
Принцип работы шагового двигателя и необходимость драйвера
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Его ротор поворачивается на фиксированный угол при подаче одного электрического импульса. Для корректной работы такого двигателя необходим специальный драйвер, который выполняет следующие функции:
- Формирует последовательность импульсов нужной формы для обмоток двигателя
- Ограничивает ток через обмотки на заданном уровне
- Обеспечивает нужное направление вращения
- Реализует различные режимы работы (полный шаг, полушаг, микрошаг)
Без специализированного драйвера управлять шаговым двигателем очень сложно, а в некоторых случаях невозможно. Поэтому драйвер является неотъемлемой частью системы управления на основе шаговых двигателей.
Основные типы драйверов шаговых двигателей
Существует несколько основных типов драйверов шаговых двигателей:
- Униполярные драйверы — используются для управления униполярными шаговыми двигателями. Имеют простую схему, но меньшую эффективность.
- Биполярные драйверы — применяются для биполярных шаговых двигателей. Имеют более сложную схему, но обеспечивают лучшие характеристики.
- Драйверы с ШИМ-регулированием тока — обеспечивают точное управление током обмоток с помощью широтно-импульсной модуляции.
- Микрошаговые драйверы — позволяют делить полный шаг двигателя на микрошаги для повышения плавности вращения.
Выбор типа драйвера зависит от конкретной задачи, типа используемого двигателя и требований к точности позиционирования.
Выбор напряжения и тока для шагового двигателя
Правильный выбор напряжения питания и рабочего тока критически важен для эффективной работы шагового двигателя. При этом необходимо учитывать следующие факторы:
- Напряжение питания влияет на скорость нарастания тока в обмотках и максимальную скорость вращения двигателя. Чем выше напряжение, тем быстрее нарастает ток и выше максимальная скорость.
- Рабочий ток определяет крутящий момент двигателя. Больший ток обеспечивает больший момент, но приводит к повышенному нагреву.
- Индуктивность обмоток двигателя ограничивает скорость нарастания тока. Для двигателей с высокой индуктивностью требуется более высокое напряжение питания.
Обычно рекомендуется выбирать напряжение питания в 10-20 раз выше номинального напряжения двигателя. Рабочий ток устанавливается на уровне номинального тока двигателя или немного ниже во избежание перегрева.
Схема простого драйвера шагового двигателя
Основные компоненты схемы:
- Два H-моста для управления обмотками двигателя
- Микроконтроллер для формирования управляющих сигналов
- Силовые цепи питания
- Выходы для подключения обмоток двигателя (A и B)
Такая схема позволяет реализовать полношаговый и полушаговый режимы работы двигателя. Для реализации микрошагового режима потребуется более сложная схема с ШИМ-управлением током обмоток.
Современные микросхемы для драйверов шаговых двигателей
Современные драйверы шаговых двигателей часто реализуются на основе специализированных микросхем, которые значительно упрощают схемотехнику. Вот некоторые популярные микросхемы драйверов:
- A4988 — популярный драйвер для 3D-принтеров, поддерживает микрошаговый режим до 1/16 шага
- DRV8825 — более мощная альтернатива A4988, поддерживает микрошаг до 1/32
- TMC2208 — «тихий» драйвер с продвинутым микрошаговым режимом до 1/256
- L298N — простой драйвер для небольших двигателей, без микрошага
Выбор конкретной микросхемы зависит от требований к мощности, точности и функциональности драйвера.
Изготовление драйвера шагового двигателя своими руками
Для самостоятельного изготовления простого драйвера шагового двигателя потребуются следующие компоненты:
- Микросхема драйвера (например, A4988 или L298N)
- Микроконтроллер (Arduino или аналогичный)
- Конденсаторы и резисторы согласно схеме
- Печатная плата или макетная плата
- Источник питания соответствующей мощности
Процесс сборки включает следующие этапы:
- Разработка или выбор готовой схемы драйвера
- Изготовление или заказ печатной платы
- Пайка компонентов на плату
- Программирование микроконтроллера
- Тестирование и настройка драйвера
При самостоятельном изготовлении важно соблюдать меры безопасности и правила работы с электронными компонентами.
Настройка и оптимизация работы драйвера
После изготовления драйвера необходимо провести его настройку и оптимизацию:
- Установка правильного тока обмоток с помощью подстроечного резистора или программно
- Выбор оптимального режима микрошага для конкретной задачи
- Настройка параметров разгона и торможения для плавной работы
- Проверка тепловых режимов работы драйвера и двигателя
- Оптимизация управляющей программы для достижения требуемых характеристик движения
Правильная настройка позволит добиться максимальной производительности и надежности системы управления шаговым двигателем.
Драйвер шагового двигателя своими руками
Драйвер шагового двигателя своими руками — управление с помощью аудио усилителя
Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.
Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.
Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
Рисунок 2
Формы сигналов в схеме на Рисунке 2: вход Шаг_А (Канал 1), вход Шаг_В (Канал 2), выходы OUTR+ (Канал 3), OUTR- (Канал 4) и сигнал на обмотках двигателя (OUTR+ минус OUTR-, средняя осциллограмма), вычисленный с помощью математической функции осциллографа.
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг 3,7/5 2871reviews
Драйвера Шд Своими Руками Радиоэлектроника для профессионалов. Промышленная электроника. Драйвер Шагового Двигателя Для Чпу Станка.
Сайт для людей с паяльником в руках. РадиоКот: 4-х осевой StepDir контроллер шаговых. Вы здесь ‘ самодельный станок с ЧПУ, отзывы ‘ Схема контроллера, шаговые двигатели ‘ Драйвер для двигателя с 4-ми выводами. В инете есть статья по драйверам ШД, там этот процесс хорошо описан. Управление двигателями робота — SERVODROID.
Самодельный Драйвер. Контроллер биполярного шагового двигателя. Полушаг и микрошаг.
Простой драйвер биполярного. Этот драйвер реализует полношаговый режим с одной включенной фазой и способен управлять двигателем с током до 0,5А. Контроллер шагового двигателя своими руками tech Из серии ‘станок с ЧПУ своими руками. Понимаю, конечно, что хочется попробовать. Драйвер ULN2003, подключенный к этим выходам, исправен? Простой драйвер биполярного ШД cadhouse В статье описывается stepdir контроллер униполярных шаговых двигателей.
На практике в программе Mach4 и подобных, драйвер работает на фиксированной частоте Kernel speed 4 ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР — Тест на шумность шаговых двигателей и драйверов для 3D принтера. Своими руками.
Разбираем G-коды реальной программы. Pronterface – управление 3D принтером. Драйвер Для Мтк 6582. Простой в изготовлении контроллер шагового двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов. Драйвер для двигателя с 4-ми выводами Форум. Как настроить LinuxCNC или Мач, или GRBL, чтобы на китайских драйверах шагового двигателя выставить микрошаг. Ходовая гайка для ЧПУ своими руками.
Свежие комментарии. Andrey Kabanov к записи Водородная горелка своими руками. Принципиальная схема Контроллер шагового двигателя Схема драйвера биполярного шагового двигателя и USB контроллера схема длинная и нуждается в прокрутке для: Драйвер шагового двигателя USB на микроконтроллере AVR своими руками. Драйвер Шагового Двигателя Для Чпу Станка Форум forum При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Kb — таблицы специализированных микросхем драйверов.
Драйвер биполярного ШД на транзисторах Форум Как уже отмечалось ранее, для управления биполярными двигателями требуются более сложные схемы, такие как H-мосты. Схема простого драйвера для униполярного шагового.
Смотреть HD Опубликовано: 3. ПРОСТОЙ ДРАЙВЕР ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ СВОИМИ РУКАМИ ССЫЛКА НА СХЕМУ. Как запустить шаговый двигатель без драйвера How to run a stepper motor without a driver.
Драйвер шагового двигателя на основе SLA7024M. Создаем робота своими руками по видео-урокам в статье для начинающих робототехников. Драйверы униполярного и биполярного шагового. Драйвера Шд Своими Руками.
Самодельный станок с ЧПУ | Поиск
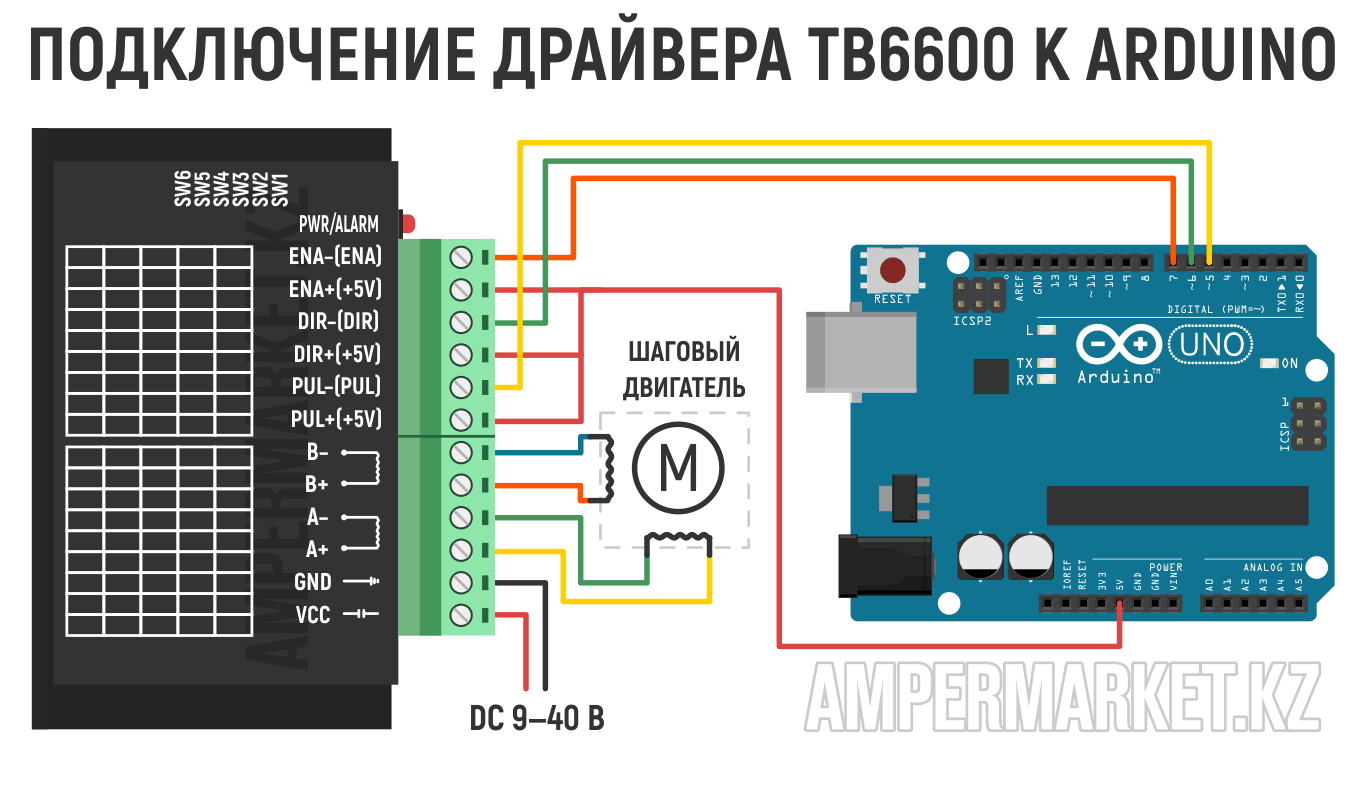
Подключение драйвера ШД на L298N к Ардуино, шаговому двигателю и БП
Подключение драйвера ШД на L298N к Ардуино, шаговому двигателю и БП
Получив множество писем с просьбами о рассмотрении возможности подключения к разрабатываемому станку простейшего драйвера ШД на L298N для биполярных двигателей, я купил на aliexpress.
Подключение драйвера ШД на TB6560 к Ардуино, шаговому двигателю и БП
Подключение драйвера ШД на TB6560 к Ардуино, шаговому двигателю и БП
Разобравшись с драйверами ШД DM420, я понял, что они обладают не сбалансированным набором возможностей.
Изготовление каретки винтовой передачи для станка с ЧПУ на Ардуино
Изготовление каретки винтовой передачи скольжения станка с ЧПУ
В качестви гаек скольжения в винтовой передаче простого станка с ЧПУ используются обычные гайки М6, закреплённые на подвижной платформе.
Самодельный источник питаний ШД для станка с ЧПУ на Ардуино
Изготовление источника питания из старых зарядников для телефонов
С источником питания для шаговых двигателей можно особо не заморачиваться и купить обычный блок питания для персонального компьютера.
Самодельная муфта соединения ШД и оси для станка с ЧПУ на Ардуино
Муфта соединения оси шагового двигателя и оси винтовой передачи
Для передачи крутящего момента от шагового двигателя оси винтовой передачи станка ЧПУ можно использовать гибкую муфту .
Контакты разработчиков ПО для самодельного станка с ЧПУ
Контакты
Внимание! Я не занимаюсь куплей-продажей составляющих станков с ЧПУ.
Где купить комплектующие для самодельного станка с ЧПУ
Где и как купить детали для изготовления простого станка с ЧПУ
В этом разделе описано, где можно приобрести комплектующие для дешёвого станка с ЧПУ.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для гравировки фотографий на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание , фотографии, картины
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: выжигание и резка орнаментов и силуэтов с помощью CO2-лазера
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино для интерполяции дуги
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , драйверы с управлением DIR/PUL ( CW/CLK )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: пример интерполяции дуги
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для лазерной гравировки и резки силуэтов и орнаментов твердотельником
Прошивка Ардуино для станка с ЧПУ для лазерной гравировки и резки силуэтов и орнаментов твердотельным лазером
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание силуэтов и орнаментов
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для 3D-сканирования на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: 3D-сканирование
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для фрезеровки на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: рисование , фрезерование 2D , фрезерование 3D
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для фрезеровки, Драйверы L298N, 4 контакта
Прошивка Ардуино для станка с ЧПУ, драйверы на L298N, биполярные шаговые двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N
Шаговые двигатели: биполярные
Назначение: рисование , фрезерование 2D , фрезерование 3D
Схема подключения: здесь
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для лазерной гравировки силуэтов, Драйверы L298N, 4 контакта
Прошивка Ардуино для станка с ЧПУ, драйверы L298N, биполярные двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N , двойной мост (double bridge)
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание силуэтов и орнаментов
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйвер L298N) для гравировки фотографий на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы L298N, биполярные двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N , драйверы с четырехконтактным управлением (двойной мост)
Шаговые двигатели: биполярные, 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание , фотографии, картины
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы ШД ULN2003) для лазерной гравировки на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы ULN2003, двигатели 28BYJ-48-5V
Краткое описание
Контроллер: Ардуино
Драйверы ШД: ULN2003
Шаговые двигатели: 28BYJ-48-5V
Назначение: лазерная гравировка / выжигание
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы ШД ULN2003) для для фрезеровки 2D, 3D на ЧПУ
Прошивка Ардуино для станка с ЧПУ, драйверы ULN2003, двигатели 28BYJ-48-5V
Краткое описание
Контроллер: Ардуино
Драйверы ШД: ULN2003
Шаговые двигатели: 28BYJ-48-5V
Назначение: рисование , фрезерование 2D , фрезерование 3D
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Скачать прошивку для Ардуино ЧПУ, выбор прошивки Arduino
Прошивка Ардуино для станка с ЧПУ
Скачать исходный код прошивки для Ардуино
Ниже представлен список прошивок Ардуино для различных конфигураций станка с ЧПУ.
Скачать прошивку для Ардуино ЧПУ, установка прошивки Arduino
Прошивка Ардуино для станка с ЧПУ
Здесь можно скачать прошивку для ЧПУ на Ардуино.
On-line генерация G-кода по растровому изображению
Интернет-сервис формирования
On-line генерация G-кода по растровому изображению
Интернет-сервис формирования G-кода из BMP, JPG, GIF, PNG
Выбрать изображение
BMP, JPG, GIF или PNG.
Программа для ЧПУ на Ардуино для фрезеровки, гравировки, 3D-сканирования
Скачать последнюю версию программы управления станком с ЧПУ на Ардуино
Для корректного скачивания программного обеспечения для станка с ЧПУ на базе Arduino нажмите правой кнопкой мыши на соответствующей ссылке
и в выпавшем меню выберите пункт Сохранить объект как .
Руководство по программе для ЧПУ на Ардуино: настройка программы управления станком с ЧПУ
Экспорт G-кода
Настройка экспорта G-кода в программе ECNC
В программе ECNC , начиная с версии 2.
Скачать программу для Ардуино ЧПУ, установка программы ECNC
Программа управления ЧПУ на Ардуино для Windows
Скачать программу для работы со станком с ЧПУ на базе Ардуино
Здесь можно скачать Ардуино ЧПУ программу бесплатно .
Пошаговая инструкция по гравировке не металле на станке с ЧПУ
Гравировка на металле с помощью слабого лазера
Здесь я опишу, как гравировать на поверхности металла с помощью станка с ЧПУ и слабого лазерного модуля.
Электроника для сборки самого дешевого ЧПУ на Ардуино
Электроника, необходимая для изготовления простого самодельного станка с ЧПУ
При создании станка с CNC нам понадобятся следующие электронные компоненты:
компьютер
Для простого станка с ЧПУ понадобится обычный компьютер/ноутбук с одним свободным USB разъёмом.
ЧПУ на Ардуино, установка ременной передачи
Установка ременной передачи на станок с ЧПУ на Ардуино
Следующая доработка коснулась скорости работы станка с ЧПУ в ущерб его мощности.
ЧПУ на Ардуино, изготовление дешёвого станка для выжигания / гравировки лазером
Лазерный гравер с ЧПУ на Arduino
Продолжаем дорабатывать простой станок с ЧПУ на Arduino.
ЧПУ на Ардуино, изготовление простого контактного 3D-сканера на Ардуино
Делаем контактный 3D-сканер из дешевого станка с ЧПУ на базе Ардуино
Продолжаем дорабатывать простой станок с ЧПУ на Arduino.
ЧПУ на Ардуино, установка мощных двигателей 17HS3404N (корпус Nema 17) и драйверов DM420A
Подключаем к станку с ЧПУ на базе Ардуино более мощные и быстрые ШД 17HS3404N в корпусе Nema 17 и драйверы шаговых двигателей DM420A
Порывшись на любимом мной сайте китайских товаров выбрал, как мне кажется самый бюджетный и подходящий вариант: гибридные шаговые двигатели 17HS3404N в корпусе Nema 17 с четырьмя управляющими проводами и драйвера ШД DM420A.
ЧПУ на Ардуино, изготовление дешёвого станка ЧПУ
Домашний ЧПУ на Arduino
С чего начать изготовление дешевого станка с ЧПУ
Надо определиться, какие двигатели и какую управляющую электронику для ЧПУ будем использовать.
Драйвер ШД ULN2003 для униполярных двигателей, ЧПУ на Ардуино
Драйвер на ULN2003 для униполярных двигателей, Самый дешёвый ЧПУ
Описание возможностей драйвера ULN2003 шагового двигателя, который использовался при изготовлении самого дешёвого ЧПУ
Фото драйвера униполярных шаговых двигателей на ULN2003 для самого дешевого станка с ЧПУ
Основные характеристики драйвера униполярных ШД на ULN2003
назначение: только для управления униполярными (с 5 выводами) шаговыми двигателями;
напряжение управления: 5 вольт;
максимальное напряжение питания ШД: 12 вольт;
максимальный ток питания ШД: зависит от охлаждения;
настройки: отсутсвуют .
Самодельный станок с ЧПУ, модификация, апгрейд, ускорение, лазерная гравировка, 3D-сканер, 3D-принтер
Модификации простого самодельного станка с ЧПУ
Дешёвый станок с ЧПУ на базе Ардуино претерпел множество модификаций, целью которых было ускорить работу, получить новый функционал.
Шаговый двигатель 28BYJ-48-5V, ЧПУ на Ардуино
Униполярный шаговый двигатель 28BYJ-48-5V, Самый дешёвый ЧПУ
Описание возможностей шагового двигателя 28BYJ-48-5V, который использовался при изготовлении самого дешёвого ЧПУ
Фото шагового двигателя 28BYJ-48-5V для самого дешевого станка с ЧПУ
Основные характеристики шагового двигателя 28BYJ-48-5V
— напряжение питания: 5 вольт;
— тип двигателя: униполярный ;
— количество выводов: 5 проводов;
— шагов на полный оборот: 2048 шагов;
— задержка между шагами: 2 миллисекунды;
— итого, на полный оборот: 4 секунды.
Самодельный станок с ЧПУ, компоненты, составляющие, лазерная гравировка, 3D-сканер, 3D-принтер, описание
Описание составляющих простого самодельного станка с ЧПУ
Самый дешёвый станок с ЧПУ.
Детали для сборки самого дешевого ЧПУ на Ардуино
Механические детали простого самодельного станка с ЧПУ
При создании станка с CNC нам понадобятся следующие детали:
фанера 6мм
Для простого станка с ЧПУ понадобится менее 1 квадратного метра фанеры 6мм.
ЧПУ на Ардуино, чертежи, модель и сборка простой рамы для станка с ЧПУ
Чертежи рамы станка с ЧПУ
Классическая рама дешёвого станка с ЧПУ на Ардуино
Как сделать простую раму станка с ЧПУ? С чего начать изготовление станка с ЧПУ?
Для того, чтобы сделать классическую раму станка с ЧПУ , нам понадобится примерно 1 кв.
Архитектура, схема сборки и подключения электроники простейшего ЧПУ на Ардуино
Архитектура станка с ЧПУ на базе Arduino
Простая рама дешёвого станка с ЧПУ на Ардуино
Первый вариант рамы был изготовлен из тонкой фанеры 6 мм.
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Фото сокола на CO2-лазерном ЧПУ
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Размер картины 200×140 мм.
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой
Шкатулка с медальоном на CO2-лазерном ЧПУ
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой.
Видео CO2-лазерной резки подсвечника из фанеры на простом ЧПУ
Видео CO2-лазерной резки подсвечника из фанеры на простом ЧПУ
Вырезаем детали подсвечника для чайных свечей на самодельном ЧПУ для CO2-резки
Резка углекислотным лазером деталей подсвечника из фанеры.
Гравирование лазером на полосе из нержавейки на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Гравирование лазером на полосе из нержавейки на станке с ЧПУ на базе Ардуино.
Простой орнамент, нарисованный станком с ЧПУ на Ардуино с ременным приводом
Фото простого станка с ЧПУ
Простой орнамент, нарисованный станком с ЧПУ на Ардуино с ременным приводом
Простой орнамент, который был нарисован станком с ЧПУ с ременным приводом на Ардуино .
Фото станка с ЧПУ на Ардуино с ременной передачей
Фото простого станка с ЧПУ
Фото станка с ЧПУ на Ардуино с ременным приводом
Фото станка с ЧПУ на Ардуино с ременной передачей .
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Гравирование печатной платы фиолетовым лазером на станке с ЧПУ .
Гравирование лазером простого орнамента на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером простого орнамента на станке с ЧПУ на базе Ардуино
Гравирование простого орнамента фиолетовым лазером на станке с ЧПУ .
Простой орнамент, выгравированный на фанере лазером на ЧПУ Ардуино
Простой орнамент, выгравированный на фанере лазером на станке с ЧПУ на Ардуино
Гравирование простого орнамента фиолетовым лазером на станке с ЧПУ .
Станок с ЧПУ, контроллер: Arduino, драйверы ШД: DM420A, шаговые двигатели: 17HS3404N
Фото простого станка с ЧПУ
Станок с ЧПУ, контроллер: Arduino, драйверы ШД: DM420A, шаговые двигатели: 17HS3404N
Более мощный вариант станка с ЧПУ на базе Ардуино.
2D фрезерование простого орнамента
Фото простого станка с ЧПУ
2D фрезерование простого орнамента
2D фрезерование простого орнамента.
2D фрезерование силуэта рыбы-молот
Фото простого станка с ЧПУ
2D фрезерование силуэта рыбы-молот
2D фрезерование силуэта рыбы-молот.
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
2D фрезерование силуэта дельфина
Фото простого станка с ЧПУ
2D фрезерование силуэта дельфина.
Дешёвый станок с ЧПУ на базе Ардуино рисует цветок
Видео простого станка с ЧПУ
Дешёвый станок с ЧПУ на базе Ардуино рисует цветок
Станок с ЧПУ рисует цветок.
Фото рисунка, сделанного простейшим станком с ЧПУ на Ардуино
Фото простого станка с ЧПУ
Самый дешёвый станок с ЧПУ нарисовал цветок
Результаты тестирования.
Фото станка с ЧПУ на Arduino, полная комплектация: нетбук, рама, шаговые двигатели, драйверы
Фото простого станка с ЧПУ
Полный комплект станка с ЧПУ на Ардуино
Фото станка с ЧПУ на Arduino в полной комплектации.
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Размер картины 116×80 мм.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стекле CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу ECNC для управления ЧПУ на Ардуино.
Фото простого станка с ЧПУ на Ардуино, крупный план
Фото простого станка с ЧПУ
Крупный план станка с ЧПУ.
ЧПУ на Ардуино, Весь комплекс для фрезерования в сборе
Фото простого станка с ЧПУ
Весь комплекс для фрезерования в сборе.
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Фото вазы, вырезанной CO2-лазерном ЧПУ из фанеры
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Примерные размеры вазочки 150x140x80 мм.
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
Самодельный станок с ЧПУ своими руками, сборка, модификации
Добро пожаловать на сайт открытого проекта по разработке станка с ЧПУ на базе Arduino своими руками
Проект Простой станок с ЧПУ на Ардуино задумывался для разработки, отладки и тестирования программного обеспечения, необходимого для работы станков с числовым программным управлением (ЧПУ).
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Как сделать станок с ЧПУ на Ардуино с CO2-резкой?
При обдумывании конструкции станка делал упор на следующие моменты:
Минимальная стоимость;
Доступность комплектующих;
Простота изготовления;
Минимальное количество деталей;
Совместимость с имеющимся программным обеспечением;
Возможность для дальнейших модификаций, доработок.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Комплектующие из Китая для ЧПУ на Ардуино с CO2-резкой
Заказываем в Китайских интернет-магазинах, например на aliexpress.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Комплектующие для ЧПУ на Ардуино с CO2-резкой из местных магазинов
Закупался в строительном супермаркете Леруа Мерлен , зоомагазине 4 лапы и местных строительных мегазинах.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Осмотр комплектующих, сборка и тестирование лазерного комплекса
Когда пришла трубка, обязательно проверяем её целостность, как снаружи, так и внутри.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Система охлаждения для CO2-лазера (чиллер) своими руками
Итак, лазерный комплекс работает.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Собираем раму для ЧПУ с CO2-лазером своими руками
Рама будет с рабочим полем 500×500 мм.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Компоновка бюджетного станка с ЧПУ для CO2-резки
Вид сверху станка с ЧПУ для лазерной углекислотной резки.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Изготовление оправ для зеркал и линзы CO2-лазера для ЧПУ
Из алюминиевого уголка 50х20х2 сделал оправки для зеркал и линз.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Калибровка зеркал и трубки CO2-лазера станка с ЧПУ
Приступаем к калибровке зеркал.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Подключение электроники станка с ЧПУ для резки CO2-лазером
Заземляем блок питания.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Включение станка с ЧПУ на Arduino для CO2-резки
Для запуска станка потребуется следующее.
ЧПУ на Ардуино, Резка по рисунку
Резка по рисунку в программе управления станком с ЧПУ на Ардуино
Введение
В связи с пожеланиями пользователей задумался над возможностью резки, гравировки по рисунку в программе.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Предварительная подготовка растрового изображения (BMP,JPG,PNG) перед ЧПУ резкой
Далее, буду описывать последовательность действий и комментировать, что делет программа на разных этапах обработки изображения для ЧПУ.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Прошивка ардуино
Чтобы станок правильно работал необходимо установить нужную пришивку в ардуино.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Заключение
Обратите внимание, как качественно нейронная сеть преобразовала изображение с сеткой, двумя фонами и водяными знаками в вектор, а затем в растр, понятный ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стекле CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу ECNC для управления ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка фотографии CO2-лезром в программе управления станком с ЧПУ на Ардуино
Подоготовка фотографии / картины для гравировки CO2-лазером
Далее опишу, как в программе управления простым станком с ЧПУ на Arduino, выполнить граивровку картины или фотографии CO2-лазером.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стеклянном стакане CO2-лазером
Изготовление оснастки для вращения круглой заготовки
Оснастка систоит из основания, изготовленного из обычной доски.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка фотографии CO2-лезром в программе управления станком с ЧПУ на Ардуино
Подключение ШИМ Ардуино для управления мощностью CO2-лазера
Для управления мощностью CO2-лазера используется PWM (ШИМ, широтно-импульсная модуляция).
ЧПУ на Ардуино, Гравировка CO2-лазером картинки на цилиндрической поверхности
Гравировка фотографии на стеклянном стакане CO2-лазером
Доработка ЧПУ для гравировки на цилиндре
Для гравировки на стаканах, вазах и прочих предметах, имеющих цилиндрическую поверхность, можно изготовить отдельный станок.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка на фанере фотографии CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу eCNC для управления ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка CO2-лазером картинки на стекле
Гравировка фотографии на плоском прозрачном стекле CO2-лазером
Введение
CO2-лазер легко гравирует на обычном стекле.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Подоготовка изображения для гравировки CO2-лазером
Далее опишу, как в программе управления простым станком с ЧПУ на Arduino, выполнить гравировку орнамента CO2-лазером.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Подготовка металлической поверхности и нанесение пасты перед CO2-гравировкой
Перед нанесение пасты шлифуем поверхность.
Прошивка для Arduino + CNC Shield, MKS DLC для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка для станка с ЧПУ, Ардуино + CNC Shield, MKS DLC
Краткое описание
Контроллер: Ардуино UNO, Mega + CNC Shiled v3.
Скачать прошивку для MKS DLC, CNC Shield ЧПУ, выбор прошивки MKS DLC, CNC Shield
Прошивки MKS DLC и CNC Shield для станка с ЧПУ
Предложеннные прошивки могут быть загружены в контроллеры MKS DLC v1.
Прошивка для MKS DLC, CNC Shield для фрезеровки шпинделем на ЧПУ на Ардуино
Прошивка контроллера MKS DLC и CNC Shield для станка с ЧПУ
Краткое описание
Контроллер: MKS DLC v1.
ЧПУ на Ардуино, Резка по рисунку
Изготовление оправы для линзы в программе управления станком с ЧПУ на Ардуино
Подготовка изображения
В этом примере сделаем простенькую лупу.
ЧПУ на Ардуино, Резка по рисунку
Резка на ЧПУ по рисунку, сделанному в Paint
Прошивка ардуино
Чтобы станок правильно работал необходимо установить нужную пришивку в ардуино.
Прошивка для Arduino + CNC Shield, MKS DLC для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка для станка с ЧПУ, Ардуино + CNC Shield, MKS DLC
Краткое описание
Контроллер: Ардуино UNO, Mega + CNC Shiled v3.
Часто задаваемые вопросы по ЧПУ на Ардуино
Вопросы и ответы
Как получить исходный код програмы управления ЧПУ на ардуино?
Чтобы получить исходный код, надо что-то сделать для проекта.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Прошивка Ардуино для гравировки CO2-лазером на металле с помощью пасты
Прошивка будет использоваться та же, что и для гравировки фотографий на фанере.
Как получить исходники программы ECNC
Как получить исходный код програмы управления ЧПУ на ардуино?
Немного истории
Изначально проект задумывался, как полностью открытый.
Как получить исходники программы ECNC, Минимальный функционал
Как получить исходный код програмы управления ЧПУ на ардуино?
Что делать НЕ НАДО
Не нужно писать мне письма с просьбой о предоставлении исходников программы
Не предлагайте мне сотрудничество и не просите исходники под предлогом: «Мы же партнеры — мы должны доверять друг-другу».
Рассчет максимальной скорости каретки
Скорость перемещения каретки
Как определить задержку между шагами ШД
Если задержку между шагами поставить слишком маленькую, то получим пропуски.
Простой драйвер шагового двигателя | 2 Схемы
Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
Схема драйвера шагового двигателя
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали — IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11
Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.
Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Драйвер шагового дигателя (управление шаговыми двигателями с помощью компьютера) — Самодельный ЧПУ — Каталог статей
Драйвер шагового дигателя (управление шаговыми двигателями с помощью компьютера)
В данной статье описан один из наиболее простых методов подключения нескольких шаговых двигателей к компьютеру через порт LPT, а алгоритм управления двигателями. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя.
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Для управления биполярным двигателем требуется более сложный драйвер. Драйвер – так называется силовая часть электро схемы управления шаговым двигателем, не путать с программным драйвером.
Я, в своих экспериментах использовал шаговые двигатели от 5,25-дюймов дисководов. В основном в дисководах попадаются двигатели с сопротивлением обмоток 70 ом и напряжением питания 12в. Всю электрическую схему можно разбить на две части: контроллер (буфер) и драйвер см.рис.1.
Разработанный мной контроллер может обслуживать до 16 шаговых двигателей, он собран на трех микросхемах 555TM7. Схема контроллера изображена на рис.2.
Контроллер подключается к LPT. Привожу назначение выводов разъема порта LPT.
выв. | Название | Направление | Описание |
1 | STROBE | ввод и вывод | устанавливается PC после завершения каждой передачи данных |
2/9 | DO-D7 | вывод | 8 линий данных |
10 | АСК | ввод | устанавливается в «0» внешним устройством после приема байта |
11 | BUSY | ввод | устройство показывает, что оно занято, путем установки этой линии в «1» |
12 | Paper out | ввод | для принтеров |
13 | Select | ввод | устройство показывает, что оно готово, путем установки на этой линии «1 » |
14 | Autofeed | Ввод и вывод | |
15 | Error | ввод | индицирует об ошибке |
16 | Initialize | Ввод и вывод | |
17 | Select In | Ввод и вывод | |
18-25 | Ground | GND | общий провод |
Я разбил 8 бит данных идущих от LPT на две группы по 4 бит: «данные» (bit 0-3) и «адреса» (bit 4-7)
| |||||||
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
данные | адрес –определяет на какой двигатель придет сигнал — данные | ||||||
«Данные» передаются на триггеры ТМ7 выводы 2, 3, 6,7 (D1, D2, D3, D4 см.рис.2), а «адреса» определяют какой из триггеров запишет эти «данные».
Рассмотрим примеры:
Биты LPT | Примечание | |||||||
7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
«адрес» | «данные» | |||||||
4 | 3 | 2 | 1 | 4 | 3 | 2 | 1 | |
0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | Данные 0101 запишутся в триггер 1 и передадутся в драйвер 1 |
0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | Данные 0101 запишутся в триггер 1 и передадутся в драйвер 2 |
0 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | Данные 0101 запишутся в триггер 1 и передадутся в драйвер 3 |
0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | Данные никуда не поступят, т.к. не выбран «адрес» |
0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | Данные 1011 запишутся сразу в три триггера 1,2,3 |
В моей схеме 7 бит не используется т.к. применено 3 двигателя.
Для подключения к схеме 16 двигателей необходимо на управляющие биты «адреса» установить дешифратор. К выходам ТМ7 подключается драйвер – силовые ключи коммутирующие обмотки шагового двигателя. Драйвер состоит из 4х транзисторов КТ 972 см.рис.3.
Диоды можно использовать любые с допустимым импульсным током 200мА
Также можно использовать серийные микросхемы (stepper motor driver), например ULN 2004 (9 ключей) на 0.6А. или НА13408 (1.5А) см.рис.4
Для питания контроллера и шаговых двигателей понадобится блок питания.
Его мощность зависит от мощности шаговых двигателей. При использовании двигателей от 5″ дисководов потребляемый ток будет равен: 3 двигателя, одновременно может запитано по 2 обмотки (полу-шаговый режим) по 0.6А т.е.
3х2х0,6=3,6А
А теперь о том как управлять контроллером и шаговыми двигателями с помощью компьютера. Проще всего из Qbasic (под DOS)
Команда
OUT 888, Х
Порт принтера LPT имеет адрес 888. процедурой OUT мы в порт помещаем число Х.
Повернем двигатель №1 на один оборот:
OUT 888, 17 ‘ число 00010001
‘задержка
OUT 888, 18 ‘ число 00010010
‘задержка
OUT 888, 20 ‘ число 00010100
‘задержка
OUT 888, 24 ‘ число 00011000
‘задержка
После каждой команды необходимо поставить задержку, т.к. шаговый двигатель не успеет повернуться в следующее положение.
Например создать пустой цикл:
FOR i = 1 TO 100000
NEXT i
Максимальная частота коммутации обмоток шагового двигателя (те которые были у меня) 2000Гц, что соответствует 4 об/сек. При большей частоте двигатель будет пропускать шаги.
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг
Cncjuniormaster.ucoz.com Блок контроллера униполярного шагового двигателя на PIC18F2320 V4. 1100 × 880 — 259k — jpg cncjuniormaster.ucoz.com Блок контроллера биполярного шагового двигателя на PIC18F2320 V5.1. 1949 × 1202 — 314k — jpg kazus.ru Контроллер шагового двигателя 1046 × 430 — 17k — gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум. 450 × 377 — 39k — jpg texvedkom.org Схемотехника привода шагового двигателя Техведком 1000 × 396 — 36k — gif we.easyelectronics.ru Делаем контроллер шагового двигателя. 440 × 474 — 101k — png mozgochiny.ru Шаговый двигатель BYJ48.
Теория управления 800 × 442 — 59k — jpg mypractic.ru Драйверы униполярного и биполярного шагового двигателя. 1024 × 519 — 56k — jpg offtop.ru Домашний станок ЧПУ 1200 × 432 — 51k — gif culibin.net Самодельный драйвер-контроллер шагового двигателя на A3977, A3979. 530 × 220 — 33k — png radiokot.ru РадиоКот:: 4-х осевой Step/Dir контроллер шаговых двигателей 500 × 545 — 15k — png cxem.net Драйвер биполярных шаговых двигателей 1200 × 843 — 74k — png forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум. 1024 × 575 — 116k — jpg detali-prof.ru Драйвер биполярных шаговых двигателей 709 × 390 — 10k — gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум.
500 × 333 — 36k — gif mysku.ru Микрошаговый драйвер A3967 для тестера РХХ автомобиля 800 × 465 — 75k — jpg forum.cxem.net Faq О Шаговых Двигателях — Роботы и модели на ДУ-управлении. 2456 × 1316 — 44k — gif profstroy-vl.ru Драйверы униполярного и биполярного шагового двигателя. 689 × 386 — 10k — gif profstroy-vl.ru Драйвер для коллекторного двигателя на полевых транзисторах 585 × 289 — 20k — jpg geektimes.ru Быстрые движения под высоким напряжением, или почти вся правда. 1920 × 803 — 273k — png.
Статье: cnc, чпу, драйвер двигателя, контроллер шагового, микрошаг, шаговый двигатель, PIC18F2320. Своими руками Форум Драйвер биполярного ШД на транзисторах Форум Cтанок своими руками, чпу своими руками, cnc. Драйвер Sm-G313Hu. Самодельный станок с ЧПУ Использование шаговых двигателей.
admin
Описание драйвера шагового двигателя
Программное обеспечение контроллера шагового двигателя
| |||||||||
diy драйвер шагового двигателя
DIY контроллер шагового двигателя: 6 шагов (с изображениями) — Instructables
DIY контроллер шагового двигателя: помните эти двигатели постоянного тока, все, что вам нужно сделать, это подключить положительный и отрицательный выводы к батарее и холла это начинается…
Драйверы шагового двигателя — Instructables
Простые в сборке схемы шагового двигателя и привода фрезерного станка с ЧПУ. … Шаговый двигатель и сервопривод Arduino Shield — плата AW GCSE. … Простой драйвер шагового двигателя для проектов с ЧПУ Arduino.
Драйвер шагового двигателя — Электроника DIY
Шаговые двигатели сегодня повсюду в электронике. Существует два основных типа шаговых двигателей: 1. Биполярные двигатели. Они имеют две катушки и управляются …
Создание лучшего драйвера биполярного шагового двигателя — Общие обсуждения…
14 сентября 2018 г. — Несколько лет назад я начал создавать драйверы шагового двигателя. Сначала это был простой однополярный драйвер. Мои моторы не вращались быстрее 1-2 об / с.
Схема драйвера шагового двигателя — Концентратор электроники
4 июля, 2017 — Драйвер шагового двигателя — это схема, которая принимает импульсные сигналы от …. Драйвер шагового двигателя типа DIY разработан здесь, который может управлять …
Building Bipolar драйвер шагового двигателя с нуля | Все о …
https: // ›…› Встроенные системы и микроконтроллеры
21 марта 2016 г. — В наши дни цена готовых драйверов шаговых двигателей настолько низка, что экономически нецелесообразно делать драйверы своими руками. .Даже если бы у вас был …
Контроллер шагового двигателя DIY: 6 шагов (с изображениями) — Instructables
Контроллер шагового двигателя DIY: помните об этих двигателях постоянного тока, все, что вам нужно сделать, это подключить положительный и отрицательный выводы к аккумулятор и холла он запускается …
Драйверы шаговых двигателей — Instructables
Простые в сборке схемы шаговых двигателей и драйверов для фрезерных станков с ЧПУ. … Шаговый двигатель и сервопривод Arduino Shield — плата AW GCSE. … Простой драйвер шагового двигателя для проектов с ЧПУ Arduino.
Драйвер шагового двигателя — Электроника DIY
Шаговые двигатели сегодня повсюду в электронике. Существует два основных типа шаговых двигателей: 1. Биполярные двигатели. Они имеют две катушки и управляются …
Создание лучшего драйвера биполярного шагового двигателя — Общие обсуждения …
14 сентября 2018 г. — Несколько лет назад я начал создавать драйверы шагового двигателя. Сначала это был простой однополярный драйвер. Мои моторы не вращались быстрее 1-2 об / с.
Схема драйвера шагового двигателя — Электронный узел
4 июля 2017 г. — Драйвер шагового двигателя — это схема, которая принимает импульсные сигналы от…. Здесь разработан драйвер шагового двигателя типа «сделай сам», который может управлять …
Создание драйвера биполярного шагового двигателя с нуля | Все о …
https: // ›…› Встроенные системы и микроконтроллеры
21 марта 2016 г. — В наши дни цена готовых драйверов шаговых двигателей настолько низка, что экономически нецелесообразно делать драйверы своими руками. . Даже если бы у вас был …
Схема простой схемы драйвера шагового двигателя с использованием таймера 555
15 мая 2015 г. — Эта простая схема драйвера шагового двигателя использует микросхему таймера 555 и может быть использована… Подпишитесь ниже, чтобы получать самые популярные новости, статьи и DIY …
DIY Плата драйвера шагового двигателя Arduino — Cerebral Meltdown
Эта страница покажет вам, как собрать простую плату драйвера шагового двигателя, которой можно управлять с помощью Arduino. Я построил шахту для использования с моим гелиостатом …
Сортировать по: Имя по умолчанию (A — Z) Имя (Z — A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысшая) Оценка (Самая низкая) Модель (A — Z) Модель (Z — A)
Показать: 20255075100
-21%
SKU: DM332TЭто цифровой шаговый привод, реализованный с использованием передовой технологии шагового управления.Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим нагревом и шумом. Работает ..
19,50 $ 15,50 $ Начиная с: 14,82 $
-21%
SKU: DM556T 28,00 $ 22,05 $ Начиная с: 21,18 $
-20%
SKU: DM860I 40,50 $ 32,31 $ 32,31 $ as: $ 30.92
-25%
SKU: DM2282TDM2282T — это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением.Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние значения нуля.
150,97 долларов США Всего: 119,18 долларов США
Артикул: 3DM2283T3DM2283T — это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP на основе новейших технологий. технология управления движением. Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и средние нули.
150,97 долл. США Всего: 119,18 долл. США
Схема драйвера шагового двигателя
Введение
Драйвер шагового двигателя — это схема или устройство, которое обеспечивает необходимый ток и напряжение для шагового двигателя, чтобы он работал бесперебойно.Шаговый двигатель — это тип двигателя постоянного тока, который вращается ступенчато.
Основное различие между простым двигателем постоянного тока и шаговым двигателем заключается в том, что с помощью шагового двигателя мы можем добиться точного позиционирования с помощью цифрового управления.
Шаговый двигатель вращается точно за счет синхронизации импульсных сигналов от контроллера, которые подаются через драйвер. Драйвер шагового двигателя — это схема, которая принимает импульсные сигналы от контроллера и преобразует их в движение шагового двигателя.
В этом проекте мы разработали простую схему драйвера шагового двигателя 12 В с использованием микросхемы таймера 555 (действующей как контроллер), счетчика декад CD4017 (действующего как драйвер) вместе с несколькими другими компонентами.
Принципиальная схемаНеобходимые компоненты
- 555 Таймер IC
- CD4017 Счетчик декады Джонсона (10 декодированных выходов)
- 4 x 2N2222 NPN транзисторы
- 4 x 1N4007 PN переходных диодов
- Резисторы 4 x 1 кОм (1/4 Вт)
- 2.Резистор 2 кОм (1/4 Вт)
- Резистор 470 Ом (1/4 Вт)
- Потенциометр 100 кОм (ручка)
- Керамический дисковый конденсатор 100 пФ (код — 101) (также читается как 0,1 нФ)
- Поляризованный конденсатор 1 мкФ 16 В
- Шаговый двигатель 12 В (униполярный — 5 проводов)
- Соединительные провода
- Макетная плата (макетная плата)
- Блок питания 12 В
Описание компонента
555 Таймер IC
IC 555 — очень известная микросхема таймера, которая часто используется для временных задержек, генерации импульсов и многих приложений генераторов.IC 555 имеет три режима работы: нестабильный мультивибратор (генератор импульсов), моностабильный мультивибратор (временные задержки) и бистабильный мультивибратор (триггер). В этом проекте мы использовали эту микросхему 555 для генерации импульса, то есть в нестабильном режиме работы.
CD4017 Десятилетний счетчик IC
CD4017 — это микросхема счетчика, которая выдает 10 декодированных выходов и, следовательно, счетчик декады. Эти счетчики часто используются в дисплеях, операциях с частотным разделением, двоичных счетчиках и т. Д.
Но в этом проекте мы используем микросхему счетчика CD4017 в качестве драйвера шагового двигателя.И, следовательно, эта схема драйвера шагового двигателя по сути является схемой двоичного счетчика.
Шаговый двигатель
В этом проекте используется шаговый двигатель 12 В. Это шаговый двигатель униполярного типа с 5-проводной конфигурацией. В основном, шаговые двигатели классифицируются на униполярные шаговые двигатели и биполярные шаговые двигатели в зависимости от обмоток статора. На следующем изображении показан биполярный шаговый двигатель с его обмоткой.
Схема драйвера для униполярного шагового двигателя может быть построена с помощью нескольких транзисторов или транзисторной ИС Дарлингтона, такой как ULN2003.
Но для схемы драйвера биполярного шагового двигателя требуется соединение типа Н-мост. Следовательно, мы используем ИС с H-мостом, такие как L293D, для управления биполярными шаговыми двигателями.
Схема проектирования
Мы начнем с генератора прямоугольных импульсов, то есть 555 IC в нестабильном режиме. Резистор 2,2 кОм подключен между VCC и разрядным контактом 555 (контакт 7).
Потенциометр 100 кОм подключен между разрядным контактом (контакт 7) и пороговым контактом (контакт 6), который, в свою очередь, закорочен с контактом триггера (контакт 2).
Конденсатор емкостью 1 мкФ подключен между контактом триггера (контакт 2) и GND. Байпасный конденсатор 100 пФ подключен к выводу управляющего напряжения (вывод 5). Другие контакты, то есть VCC (контакт 8), подключены к источнику питания 12 В, контакт сброса (контакт 4) к источнику питания 12 В и контакт заземления (контакт 1) к GND.
Выход микросхемы таймера 555, т. Е. Контакт 3, подается как вход синхронизации для микросхемы счетчика CD4017, т. Е. На ее 14-й контакт. Контакты VDD и VSS CD4017, то есть контакты 16 и 8, подключены к источнику питания 12 В и заземлению соответственно.Контакт включения (контакт 13) подключен к земле.
Нам нужно управлять 4 клеммами катушек двух катушек в шаговом двигателе. Следовательно, нам нужно всего 4 выхода от драйвера. Это выходы от Q0 до Q3, то есть контакты 3, 2, 4 и 7 соответственно. Выходы счетчика подключены к базовым клеммам 4 транзисторов через отдельные резисторы 1 кОм.
Счетчик должен сброситься на пятом импульсе и, следовательно, Q4 (вывод 10), который только пятым выходом, подключен к выводу сброса CD4017 i.е. контакт 15, и этот контакт подключен к GND через резистор 470 Ом.
Шаговый двигатель униполярного типа с 5-проводной конфигурацией. Центральный контакт закорочен внутри и подключен к источнику питания (здесь 12 В).
Остальные 4 вывода шагового двигателя являются концами двух катушек. Они должны быть подключены к клеммам коллектора четырех транзисторов.
Важно, чтобы они были подключены в последовательности срабатывания выходов. Наконец, между клеммами коллектора и питанием подключены четыре диода.Диоды очень важны, поскольку они защищают транзисторы от индуктивных всплесков.
Работа цепи драйвера шагового двигателя
Работа этой схемы драйвера шагового двигателя очень проста. Мы увидим пошаговое объяснение работы. Во-первых, микросхема таймера 555 настроена как нестабильный мультивибратор, т. Е. Действует как генератор прямоугольных сигналов.
В зависимости от положения потенциометра частота прямоугольной волны будет варьироваться от 7 Гц до 340 Гц.
Этот прямоугольный сигнал подается на ИС счетчика CD4017 в качестве тактового входа. Для каждого положительного перехода тактового сигнала, то есть перехода от низкого уровня к высокому, выход счетчика увеличивается на один счет.
Для первого положительного перехода на тактовом сигнале Q0 будет высоким, для второго положительного перехода Q1 будет высоким и так далее.
Поскольку нам нужно только 4 выхода, пятый выход, то есть Q4, подключен к выводу сброса, так что счетчик сбросится, и счет начнется снова.
Выходы микросхемы счетчика CD4017 подаются на 4 различных транзистора, которые, в свою очередь, подключены к 4 клеммам катушки шагового двигателя. Мы можем лучше понять следующую диаграмму.
Предположим, что точки A, B, C и D являются контактами катушек, подключенных к транзисторам. На общий провод в шаговом двигателе подается напряжение 12 В.
Когда первый тактовый сигнал подается на CD4017, Q0 становится ВЫСОКИМ. Это включит соответствующий транзистор.
В результате питание от общего провода идет через точку А на землю. Это возбуждает катушку и действует как электромагнит. Ротор притянется и повернется в это положение.
Во время второго тактового импульса выход Q1 становится ВЫСОКИМ, и в результате связанный с ним транзистор включается. Теперь ток течет от общего провода к GND через точку B.
Следовательно, эта катушка будет под напряжением и превратится в электромагнит. Это приведет к дальнейшему вращению ротора.Этот процесс продолжается, и в зависимости от частоты тактового сигнала изменяется скорость вращения шагового двигателя.
Преимущества
- Здесь разработан драйвер шагового двигателя типа «сделай сам», который может управлять униполярными шаговыми двигателями.
- Используя этот драйвер шагового двигателя, мы можем избежать дорогостоящих специализированных плат драйверов шагового двигателя.
Недостатки
- Эта конструкция неэффективна.
- Для небольшого приложения требуется много сложной разводки.
Конструкция и вывод видео
Самодельный драйвер шагового электродвигателя. Как работает шаговый электродвигатель? Как выбрать напряжение для шагового двигателя
Краткое введение в теорию и типы драйверов, советы по выбору оптимального драйвера для шагового двигателя.
Если хотите купить драйвер шагового двигателя , нажмите на информер справа
Некоторая информация, которая может помочь вам выбрать драйвер шагового двигателя .
Шаговый двигатель — двигатель со сложной схемой управления, требующий специального электронного устройства — драйвера шагового привода. Драйвер шагового двигателя получает логические сигналы STEP / DIR, которые обычно представлены высоким и низким уровнем. Опорное напряжение составляет 5 В, и в соответствии с полученными сигналами изменяется ток в обмотках двигателя, заставляя вал вращаться в соответствующем направлении. направление на указанный угол. > Сигналы Step / DIR генерируются контроллером ЧПУ или персональным компьютером, на котором запущена программа управления Mach4 или LinuxCNC.
Задача драйвера — максимально эффективно изменять ток в обмотках, а поскольку индуктивность обмоток и ротора гибридного шагового двигателя постоянно мешает этому процессу, драйверы сильно отличаются друг от друга своим характеристики и качество результирующего движения. Ток, протекающий в обмотках, определяет движение ротора: значение тока задает крутящий момент, его динамика влияет на равномерность и т. Д.
Типы (типы) SD драйверы
Драйверы делятся по способу загрузки тока в обмотку на несколько типов:
1) Драйверы сухого напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотку, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности.Эти драйверы крайне неэффективны и могут использоваться только на очень низких скоростях.
2) Дуплексные драйверы
В драйверах этого типа ток в обмотке сначала повышается до желаемого уровня с использованием высокого напряжения, затем источник высокого напряжения отключается, а требуемый ток поддерживается источником низкого напряжения. Такие драйверы достаточно эффективны, в том числе снижают нагрев двигателей, и еще иногда могут встретиться в высококлассной технике.Однако такие драйверы поддерживаются только в пошаговом и полушаговом режиме.
3) Драйверы пшеницы.
На данный момент наибольшей популярностью пользуются ШИМ-драйверы шаговых двигателей, практически все драйверы на рынке — этого типа. Эти драйверы подают на обмотку ШИМ шагового двигателя сигнал очень высокого напряжения, который отключается для достижения текущего уровня. Значение тока, на которое устанавливается отсечка, устанавливается либо потенциометром, либо DIP-переключателем, иногда это значение программируется с помощью специального программного обеспечения.Эти драйверы достаточно интеллектуальны, оснащены множеством дополнительных функций, поддерживают различное деление высоты тона, что позволяет повысить дискретность позиционирования и плавность. Однако драйверы ШИМ тоже сильно отличаются друг от друга. Помимо таких характеристик, как напряжение питания и максимальный ток обмотки, они отличаются частотой ШИМ. Лучше, если частота драйвера будет больше 20 кГц, и в целом, чем больше — тем лучше.Частота ниже 20 кГц ухудшает ходовые качества двигателей и попадает в слышимый диапазон, шаговые двигатели начинают давать неприятный пик. Драйверы шаговых двигателей, следующие за самими двигателями, делятся на униполярные и биполярные. Непусковые станки настоятельно рекомендуют не экспериментировать с приводами, а выбирать те, на которых можно получить максимальный объем техподдержки, информации и по которым продукты на рынке представлены наиболее широко. Таковы драйверы биполярных гибридных шаговых двигателей.
Как выбрать драйвер шагового двигателя (SD)
Первый параметр , на который стоит обратить внимание, когда вы решите выбрать драйвер шагового двигателя — это мощность тока, которую может обеспечить драйвер. Как правило, его можно регулировать в довольно широком диапазоне, но драйверу стоит выбрать такой, который может выдавать ток, равный текущей фазе выбранного шагового двигателя. Желательно, конечно, чтобы максимальный драйвер для водителя был еще на 15-40% больше.С одной стороны, даст запас на тот случай, если вы захотите получить от мотора больший момент, или в будущем поставить более мощный двигатель. С другой стороны, не будет лишним: производители иногда «подгоняют» рейтинги радиоэлектронных компонентов к тому или иному типу / размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, например, вызвать ненужную вибрацию.
Второй момент — Это напряжение питания.Очень важный и неоднозначный параметр. Его влияние довольно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрацию, нагрев двигателя и драйверов. Обычно максимальное напряжение источника питания примерно равно максимальному току I, умноженному на 8-10. Если максимальное указанное напряжение питания драйвера резко отличается от этих значений — необходимо дополнительно спросить, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется водителю.Существует эмпирическая формула U = 32 * КОРЕНЬ (L), где L — индуктивность обмотки шагового двигателя. Значение U, полученное по этой формуле, очень приблизительное, но оно позволяет ориентироваться при выборе драйвера: u должно примерно равняться максимально допустимому значению драйвера. Если вы получили от U до 70, значит, драйверы EM706, AM882, YKC2608M-H соответствуют этому критерию.
Третий аспект — Наличие проявленных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, требуется tluorie, потому что драйвер — это устройство силовой электроники, и поломка ключа может привести к сильному импульсу на кабелях, на которые подаются управляющие сигналы, и выгорание дорогостоящего контроллера ЧПУ.Однако, если вы решили выбрать SD-драйвер стативной модели, необходимо дополнительно спросить наличие входов и выходов.
Четвертый аспект — Наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда, разница только в резонансной частоте, которая в первую очередь зависит от момента инерции нагрузки, напряжения питания драйвера и силы фазы установленного двигателя. В случае резонансного шагового двигателя начинает вибрировать и терять крутящий момент, пока вал не будет полностью остановлен.Для подавления резонанса используются микроблоги и встроенные алгоритмы компенсации резонанса. Шаговый двигатель шагового двигателя генерирует микрокомпонент индукции ЭДС в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных, водитель немного сдвигает моторные шаги во времени относительно друг друга — такая искусственная неравномерность уровней резонанса. Механизм подавления резонанса встроен во все драйверы LEADSHINE DM, AM и EM.Драйверы с подавлением резонанса — это качественные драйверы, и если позволяет бюджет лучше брать. Однако без этого механизма драйвер остается вполне рабочим устройством — основная масса проданных драйверов — без компенсации резонанса, и тем не менее десятки тысяч машин по всему миру без проблем работают и успешно выполняют свои задачи.
Пятый аспект — протокольная часть. Вам необходимо убедиться, что драйвер работает с нужным вам протоколом, а уровни входных сигналов совместимы с требуемыми логическими уровнями.Эта проверка — пятый пункт, потому что за редким исключением подавляющее количество драйверов работает через STEP / DIR / ENABLE и совместимо с уровнем сигнала 0..5 В, нужно только убедиться.
Шестой аспект — Наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток (в т.ч. от короткого замыкания обмоток), от реверсирования питающего напряжения, от неправильного соединения фаз шагового двигателя.Чем больше таких функций — тем лучше.
Седьмой аспект — Наличие режимов микропереключения. Сейчас практически в каждом драйвере есть много режимов микрокоррозии. Однако из каждого правила есть исключения, а в драйверах GECKODRIVE только один шаг 1/10. Это мотивировано тем, что большее деление не дает большей точности, а значит, в этом нет необходимости. Однако практика показывает, что микросгге вовсе не увеличивает дискретность позиционирования или точность, а за счет того, что чем больше деление шага, тем плавнее движение вала двигателя и меньше резонанс.Соответственно, при прочих равных условиях стоит использовать деление, чем больше, тем лучше. Максимально допустимое ступенчатое деление будет определяться не только встроенными в драйвер таблицей brady, но и максимальная частота входных сигналов — так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1 / 256, так как частота вращения будет ограничена 100000 / (200 * 256) * 60 = 117 об / мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер также вряд ли сможет генерировать сигналы с частотой более 100 кГц.Если вы не планируете использовать аппаратный контроллер ЧПУ, то вашим потолком, скорее всего, будет 100 кГц, что соответствует делению 1/32.
Восьмой аспект — Наличие дополнительных функций. Их может быть много, например, функция определения «поломки» — резкая остановка вала при заклинивании крутящего момента или отсутствии шагового двигателя, выходы на внешнюю индикацию ошибок и т. Д. Все они не являются необходимо, но может значительно облегчить жизнь при сборке машины.
Девятый и самый главный аспект — качественный драйвер. Это практически не связано с характеристиками и т. Д. На рынке много предложений, и иногда характеристики драйверов двух производителей совпадают почти до запятой, и выставив их по очереди на автомате, становится ясно, что один из производители явно не занимаются своим делом, а в производстве недорогих утюгов ему повезло больше. Определить уровень драйвера заранее по каким-то косвенным данным новичку довольно сложно.Можно попробовать сосредоточиться на ряде интеллектуальных функций, таких как «Обнаружение срыва» или подавление резонанса, а также воспользоваться проверенным методом — для навигации по брендам.
Рано или поздно при сборке робота возникнет потребность в точных движениях, например, когда вы захотите сделать манипулятор. Вариантов здесь два — сервопривод , , с обратной связью для тока, напряжения и координаты, или шаговый привод. Сервопривод экономичнее, мощнее, но при этом имеет весьма нетривиальную систему управления и далеко не все, но шаговый двигатель он ближе к реальности.
Шаговый двигатель , как ясно из его названия, двигатель, который вращает дискретных движений . Это достигается за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате, изменяя направление напряжения в обмотках, можно добиться того, чтобы ротор по очереди занимал фиксированные значения.
В среднем шаговый двигатель на один оборот вала составляет около сотни шагов. Но это сильно зависит от модели двигателя, а также от его конструкции.Кроме того, существуют hemisphan и microshop mode Когда на обмотку двигателя подается измельченное напряжение, которое заставляет ротор вставать между ступенями в состояние равновесия, которое поддерживается разными уровнями напряжения на обмотках. Эти триггеры резко улучшают точность, скорость и бесшумность, но момент уменьшается, а сложность программы управления значительно возрастает — необходимо рассчитывать напряжения для каждого шага.
Один из недостатков голов, по крайней мере, для меня — это довольно длительное течение. Так как на обмотке кража обслуживается постоянно, а такого явления, как антиконцы в ней, в отличие от коллекторных двигателей, не наблюдается, то, по сути, мы нагружаемся на активное сопротивление обмоток, а это небольшой. Так что будьте готовы к тому, что вам придется сделать мощный драйвер для MOSFET. Транзисторы или убойные микросхемы специальные.
Типы шаговых двигателей
Если не вникать во внутреннюю конструкцию, количество ступеней и прочие тонкости, то с точки зрения пользователя их три типа:
- Биполярный — Имеет четыре выхода , содержит две обмотки.
- Униполярный — Имеет шесть розеток. Он содержит две обмотки, но каждая обмотка имеет вынос середины.
- Quadband — Имеет четыре независимых обмотки. По сути, это тот же униполярин, только обмотки разделены. Ворный не встречал, только в книгах.
Где взять шаговый двигатель.
Вообще-то много голов где. Самый Хлеб — пятикомпонентные диски И старые матричные принтеры .Добраться до них можно и в старинных жестких дисках на 40 Мбайт, если, конечно, рука не поднимется, чтобы стеснять такой антиквариат.
А вот в трехлетних флопперах ждем облом — дело в том, что там очень дефектная конструкция — у него только один задний подшипник, а передний торец вала упирается в подшипник, закрепленный на раме привода. Так что использовать его можно только в родном креплении. Или сжечь высокоточную конструкцию крепления. Однако может вам повезет и вы найдете нетипичную стаю с полноценным движком.
Схема управления шаговым двигателем
Попалась мне на контроллеры головок L297. и мощный двойной мост L298N.
Лирическое отступление, при желании можно пропустить
Схема включения L298N + L297 До смешного простого — надо их тупо соединять вместе. Они так созданы друг для друга, что в даташете L298N. Есть прямая ссылка на L297. , а в доке на L297. на L298N. .
Осталось только подключить микроконтроллер.
- На входе CW / CCW. Подайте направление вращения — 0 в одну сторону, 1 — в другую.
- на входе ЧАСЫ. — Импульсы. Один импульс — это один шаг.
- подъезд Половина / Полный. Задает режим работы — полный шаг / полушарие
- Сброс. Сбрасывает драйвер в состояние по умолчанию ABCD = 0101.
- Control Определяет, как указывается ШИМ, если он равен нулю, тогда ШИМ формируется выходами разрешения Inh2, и Inh3., а если 1 то через выходы к драйверу ABCD. Может быть полезно если вместо L298. , где есть куда подключить входы разрешений INh2 / INh3. Будет либо самодельный Most On транзисторы, либо любая другая микросхема.
- На входе Vref. Необходимо подать напряжение потенциометром, который определит максимальную перевалку. Подавать 5 вольт — буддер сработает на пределе, а в случае перегрузки сгорит L298. , кормите меньше — при предельном токе просто заглохнет.Я сначала тупо загонял туда еду, но потом передумал и поставил подстроечный резистор — защита все-таки вещь полезная, плохо будет если драйвер L298. гриль.
Если мне наплевать на защиту, то можно и Смысл выбросить на выходе Смысла. Это токовые шунты, с ними L297. Узнаем, какой ток протекает через драйвер L298. И он решает, он умрет и пора отрезать или растянуть. Нам нужны резисторы в помощь, учитывая, что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении 0.5 Ом будет падение напряжения порядка 2 вольт, а значит секретность около 4 * 2 = 8 Вт — для терморезистора! Ставил двубортный, но у меня и заголовок был маленький, 4 ампера крутить не умел.
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневной жизни. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще присутствует. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели относятся к классу двигателей, известных как бесщеточные двигатели. Обмотки шагового двигателя являются частью статора. Ротор представляет собой постоянный магнит или, в случае с переменным магнитным сопротивлением, зубчатый блок из магнитного материала.Все переключения производятся по внешним схемам. Обычно система двигателя — контроллер разрабатывается так, чтобы можно было вывести ротор в любое фиксированное положение, то есть система управляется положением. Циклическое позиционирование ротора зависит от его геометрии.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей: двигатели с переменной индуктивностью, двигатели с постоянными магнитами и гибридные двигатели.
Двигатели с переменной индуктивностью Использование только генерируемого магнитного поля на центральном валу, заставляющего вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами Похоже на них, за исключением того, что центральный вал поляризован северным и южным магнитными полюсами, которые будут правильно его вращать в зависимости от того, какие электромагниты включены.
Гибридный мотор — это комбинация двух предыдущих. Его намагниченный центральный вал имеет два набора зубцов для двух магнитных полюсов, которые затем выстраиваются в линию с зубьями вдоль электромагнитов. Благодаря двойному набору зубьев на центральном валу гибридный двигатель He имеет наименьший доступный размерный шаг и, следовательно, является одним из самых популярных типов шаговых двигателей.
Есть еще два типа шаговых двигателей: униполярный и биполярный . На фундаментальном уровне эти два типа работают одинаково; Электромагниты включены последовательно, заставляя центральный двигатель двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами состоит в том, что для униполярного типа требуется дополнительный провод в середине каждой катушки, который позволит току проходить либо к одному концу катушки, либо к другому.Эти два противоположных направления создают две полярности магнитного поля, фактически имитируя как положительное, так и отрицательное напряжение.
Хотя оба они имеют общее напряжение питания 5 В, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, создавая более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, что означает, что меньший крутящий момент доступен для удержания вала на месте.
Различные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6 или 8. 4-проводные линии могут поддерживаться только биполярными шаговыми двигателями, поскольку у них нет центрального провода.
5- и 6-проводные механизмы могут использоваться как для униполярного, так и для биполярного шагового двигателя, в зависимости от того, используется ли центральный провод на каждой из катушек или нет. 5-проводная конфигурация подразумевает, что центральные провода для двух наборов катушек соединены друг с другом.
Есть несколько различных способов управления шаговыми двигателями — это полный шаг, полушарие и микроблеск. Каждый из этих стилей предлагает различный крутящий момент, шаг и размеры.
Полный шаг — Такой привод всегда имеет два электромагнита. Для вращения вала один из электромагнитов выключается, а затем включается электромагнит, вызывая вращение вала на 1/4 зубца (по крайней мере, для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но также и самый большой размер шага.
Пальсага . Чтобы вращать центральный вал, первый электромагнит находится под напряжением, как первая ступень, затем второй также находится под напряжением, а первый все еще работает на второй ступени. На третьем этапе отключается первый электромагнит, на четвертом этапе — включается третий электромагнит, а второй электромагнит продолжает работать. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Microshove у него самый маленький шаг шага из всех этих стилей.Момент вращения, связанный с этим стилем, зависит от того, сколько тока проходит через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шагового двигателяДля управления шаговым двигателем нужен контроллер . Контроллер представляет собой схему, которая подает напряжение на любую из четырех катушек статора. Схемы управления довольно сложны по сравнению с обычными электродвигателями и имеют множество функций. Мы не будем их здесь подробно рассматривать, а просто приведем фрагмент популярного контроллера на ULN2003A.
В целом, шаговые двигатели — отличный способ повернуть что-либо на точный угол с большим крутящим моментом. Еще одним их преимуществом является то, что скорость вращения достигается практически мгновенно при изменении направления вращения на противоположное.
Простой контроллер шагового двигателя из компьютерного утиля стоит ~ 150 руб.
Мое машиностроение началось со случайной связи с немецкой машиной для 2000DM, которая, на мой взгляд, выглядела по-детски, но могла выполнять довольно много загруженных функций.В тот момент меня заинтересовала возможность снимать комиссии (это было еще до появления ЛУТ в моей жизни).
В результате расширенного поиска в сети было найдено несколько сайтов, посвященных данной проблеме, но русскоязычных среди них не оказалось (это было года 3 назад). В общем в итоге нашел два принтера СМ6337 (кстати, Орловский завод УМУ выпускал), откуда устаревшие униполярные шаговые двигатели (Динасин 4ШГ-023Ф 39С, аналог деш300-1-1).Параллельно с доставкой принтеров заказал и микросхему ULN2803A (с литерой А — корпус DIP). Все собрал, запустил. То, что мне попалось, досталось и дико припаянным сколам ключей, и с трудом вращающимся двигателем. Так как по схеме от Голландии для увеличения тока ключи соединены попарно, то максимальный ток тока не превышал 1а, при этом двигатель должен был быть 2а (кто знал, что я найду такую прожорливую, как это мне показалось, Jets J). Кроме того, эти ключи построены по биполярной технологии, для тех, кто не знает, падение напряжения может достигать 2В (если питание от 5, то фактически половина приходится на переходное сопротивление).
В принципе, для экспериментов с двигателями от 5 «дисков очень хороший вариант, например плоттер сделать можно, а вот что-то тяжелее карандаша (например дремель) вряд ли может оказаться высоким.
Решил собрать свою схему из дискретных элементов, благо у одного из принтеров оказалась нетронутая электроника, и я взял оттуда транзисторы КТ829 (ток до 8а, напряжение до 100В) … такая схема было собрано …
Рис.1 — Схема привода 4-х фазного униполярного двигателя.
Теперь объясню принцип. При подаче логической «1» на один из выводов (на другом «0»), например, на D0, транзистор открывается и ток течет через одну из катушек двигателя, и двигатель отрабатывает одну ступень. Далее блок подается на следующий выход D1, и на D0 блок сбрасывается в ноль. Двигатель отрабатывает прослойку. Если подать ток сразу в две соседние катушки, то реализуется полусфановый режим (для моих двигателей с углом поворота 1.8 ‘получается 400 шагов развернуться).
К общий вывод Подключите отводы от середины катушек двигателя (их два, если проводов шесть). Здесь очень хорошо описана теория шаговых двигателей — шаговых двигателей. Управление шаговым двигателем., Сразу показывает схему контроллера SD на микроконтроллере ATMEL AVR. Честно говоря, мне показалось, что это похоже на засорение гвоздей часами, но он выполняет очень хорошую функцию, как ПИМ-регулирование тока обмоток.
Я понимаю принцип, легко написать движок программного управления через LPT порт. Почему в этой схеме диоды, и тем, что нагрузка индуктивная, в случае самоиндукции она разряжается через диод, и исключается пробой транзистора, а следовательно, и его выход из строя. Еще одна деталь схемы — регистр RG (я использовал 555333), он используется как шиномонтаж, так как ток задан, например, порт LPT маленький — можно элементарно сжечь, а значит, можно сжечь весь компьютер.
Схема примитивная, и собрать ее можно за 15-20 минут, если есть все детали. Однако у этого принципа управления есть недостаток — поскольку формирование задержек при указании скорости вращения задается программой относительно внутренних часов компьютера, то в многозадачной системе (Win) он работать не будет! Будут просто проверенные шаги (может быть, в Windows и есть таймер, но я не знаю). Второй недостаток — нестабилизированный ток обмоток, максимальную мощность из двигателя не выжимает.Однако по простоте и надежности этот способ меня устраивает, тем более что, чтобы не рисковать своим Athlon 2GHz, я собрал 486 Tarantas из хлама, а кроме DOS там в принципе мало что можно поставить нормальный.
Схема, описанная выше, работала и в принципе неплохо, но я решил, что можно немного переделать схему. Применить mosfetj). транзисторы (полевые), выигрыш в том, что можно коммутировать огромные токи (до 75 — 100а), с твердыми для шаговых напряжений (до 30В), и при этом детали схемы почти не греются, ну кроме предельные значения (хотелось бы посмотреть ту которая жрет ток 100а
Как всегда в России встал вопрос где брать предметы.У меня возникла идея — извлечь транзисторы из плат записывающих устройств, благо, например атлоны кушают прилично и транзисторы там мод. Подала объявление в Фидо, и поступило предложение забрать 3 мат. Доски по 100 руб. Уловив, что в магазине за эти деньги можно купить 3 транзистора от силы, взял, задохнулся и о чудо, хотя все они сдохли, ни один транзистор в цепи питания процессора не пострадал. Вот и я получил пару десятков полевых транзисторов за сотню рублей.Схема, которая оказалась представлена ниже.
Рис.2 — также на полевых транзисторах
Отличий в этой схеме немного, в частности применена микросхема нормального буфера 75LS245 (сброшена на газовую плиту с платы 286 Matern J). Диоды можно ставить любые, главное, чтобы их максимальное напряжение было не меньше максимального напряжения питания, а предельный ток не меньше силы тока той же фазы. Поставил диоды КД213А, это 10а и 200В.Возможно для моих двигателей на 2 ампера в этом нет необходимости, но покупать запчасти не имело смысла, да и продления в текущем не будет. Резисторы служат для ограничения тока перезарядки емкости бака.
Ниже представлена печатная плата контроллера, построенного по такой схеме.
Рис. 3 — печатная плата.
Печатная плата разведена для поверхностного монтажа на одностороннем текстолите (пролежал мне кое-что дырочки начал сверлить).Микросхемы в DIP корпусах катятся с подогнанными ножками, резисторы SMD от той же материнской платы. Файл проводки в Sprint-Layout 4.0 прилагается. Можно было бы панорамировать и разъемы, но лень как говорится — двигатель прогресса, а при отладке железа удобнее было провода сэкономить.
Также следует отметить, что схема оборудована тремя контефами, на плате справа внизу шесть контактов по вертикали, рад их посадке Под три резистора каждый подключает по одному выходу переключателей от + 5В.Схема приемника:
Рис. 4 — схема неразберихи.
Вот как это выглядело у меня в процессе настройки систем:
В итоге на представленный контроллер я потратил не более 150 рублей: 100 рублей на материнские платы (при желании можно получить бесплатно) + кусок текстолита, припой и банка хлорного железа в сумме тянет на ~ 50 рублей, а хлорного железа тогда останется намного больше. Думаю, в проводах и разъемах нет смысла.(Кстати, разъем питания отключен от старого жесткого диска.)
Так как почти все детали изготавливаются в домашних условиях, дрелью, напильником, ножовками, руками и такой матерью, то зазоры конечно гигантские, но отдельные узлы доработать в процессе эксплуатации и экспериментов сделать проще все точно.
Если бы на Орловских заводах развести отдельные детали не так дорого, то мне, конечно, было бы проще рисовать все детали в САПР, со всей квалификацией и грубостью и согласовывать рабочих.Впрочем, знакомых токаров нет … а знаете, что еще интересного вы знаете …
П.С. Хочу высказать свое мнение по поводу негативного отношения автора сайта к советским и российским двигателям. Советские двигатели Дши, совсем или даже ничего, даже маломощный деш300-1-1. Так что если успели нарыть на «пиво» такие блага, поскорее их выкинуть, все равно будут работать … проверил … Но если купите, а разница в стоимости не велика, то лучше берите иностранные, потому что они обязательно будут выше.
P.P.S. E: Если что-то написал не правильно пишите, исправьте, но … работает …
Драйвер шагового двигателя — Электронное устройство, заставляющее «пройти» мимо. Де-факто стандартом в области управления SD является. STEP — сигнал шага, Dir — сигнал направления вращения, enable — сигнал поворота водителя.
Более научное определение — драйвер шагового двигателя — это электронное силовое устройство, которое на основе цифровых управляющих сигналов управляет сильноточными / высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю совершать шаги (вращаться) .
Управлять ШД намного сложнее, чем обычным коллекторным двигателем — нужно переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления шд-драйверами разработаны специальные устройства. Драйвер DRD позволяет управлять ротором ротора SD в соответствии с управляющими сигналами и электрически разделять физический шаг SHD на более мелкие неисправности.
Блок питания подключен к драйверу SD, SPD (его обмотке) и сигналам управления.Стандарт управления — это сигнализация step / dir или CW / CCW и сигнал разрешения.
Протокол STEP / DIR:
STEP signal — сигнал тактирования, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг отображается на драйвере — 1: 1, 1: 8, 1:16 и т. Д.). Как правило, водитель отрабатывает шаг вперед или сзади импульсного фронта.
Сигнал направления — это потенциальный сигнал, сигнал направления. Логическая единица — SD вращается по часовой стрелке, ноль — shd вращается против часовой стрелки или наоборот.Обычно вы можете либо инвертировать сигнал DIR либо из управляющей программы, либо поменять местами фазовое соединение PHD в разъеме в драйвере.
CW / CCW Протокол:
CW signal — сигнал тактирования, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг основан на драйвере — 1: 1, 1: 8, 1:16 и т. Д.) По часовой стрелке. Как правило, водитель отрабатывает шаг вперед или сзади импульсного фронта.
CW signal — сигнал тактирования, сигнал шага.Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг отображается на драйвере — 1: 1, 1: 8, 1:16 и т. Д.) Против часовой стрелки. Как правило, водитель отрабатывает шаг вперед или сзади импульсного фронта.
Сигнал включения — это потенциальный сигнал включения / выключения драйвера. Обычно логика работы такая: логическая единица (подано на входе) — драйвер SDA выключен и обмотка шд обесточена, ноль (ничего не подано или вход 0V) — драйвер DRD включен и обмотка шд запитана.
Драйверы SDмогут иметь дополнительные функции:
Контроль перегрузок.
Контроль напряжения питания, защита от воздействия обратного EDC от шд. При замедлении вращения SD генерирует напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении напряжение обратной ЭДС больше скачка напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков напряжения питания.При превышении порогового значения напряжения драйвер отключается.
Настройка управления при подключении управляющих сигналов и напряжений питания.
Автоматическое снижение тока обмотки при простом (отсутствие сигнала STEP) для уменьшения нагрева SD и потребляемого тока (режим AUTO-SLEEP).
Автоматический компенсатор среднечастотного резонанса шд. Резонанс обычно проявляется в диапазоне 6-12 об / мин, начинает гудеть шд и ротор останавливается. Начало и мощность резонанса сильно зависят от параметров ШД и его механической нагрузки.Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонанс СТД и сделать его вращение равномерным и стабильным во всем диапазоне частот.
Схема изменения формы фазных токов при повышении частоты (морфинг, переход из микрошагового режима в пошаговый при повышении частоты). SD умеет выдавать заявленную в TX точку только в режиме full step, поэтому в обычном приводе shd без морфинга, при использовании microbright SD работает на 70% от максимальной мощности.Драйвер SD с морфингом позволяет получить максимальную отдачу на данный момент во всем частотном диапазоне.
Встроенный генератор частоты STEP — удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем смещения без приложения для ПК.
Схема драйвера шагового двигателяс использованием микросхемы IC 555
В этом проекте мы узнаем, как создать простую схему драйвера униполярного шагового двигателя с использованием микросхемы таймера 555.Помимо таймера 555 нам также понадобится микросхема CD 4017, которая представляет собой микросхему декадного счетчика.
Автор: Ankit Negi
К этой цепи можно подключить любой униполярный двигатель для выполнения определенной задачи, хотя сначала вам нужно внести некоторые небольшие изменения.
Скорость шагового двигателя можно контролировать с помощью потенциометра, подключенного между выводом разряда и пороговым значением таймера 555.
Основные сведения о шаговых двигателях
Шаговые двигатели используются в областях, где требуется определенная величина вращения, недостижимая при использовании обычных d.c моторы. Типичное применение шагового двигателя — 3D ПРИНТЕР. Вы найдете два типа популярных шаговых двигателей: УНИПОЛЯРНЫЙ и БИПОЛЯРНЫЙ.
Как следует из названия, униполярный шаговый двигатель содержит обмотки с общим проводом, которые можно легко запитать по одной.
В то время как биполярный шаговый двигатель не имеет общего вывода между катушками, из-за чего его нельзя запустить просто по предлагаемой схеме. Для управления биполярным шаговым двигателем нам понадобится h-мостовая схема.
КОМПОНЕНТЫ:
1.555 ТАЙМЕР IC
2. CD 4017 IC
3. РЕЗИСТОРЫ 4,7К, 1К
4. ПОТЕНЦИОМЕТР 220К
5. КОНДЕНСАТОР 1 мкФ
6. 4 ДИОДА 1N4007
7. 4 ТРАНЗИСТОРА 2N2222
8. УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
9. ИСТОЧНИК ПИТАНИЯ ПОСТОЯННОГО ТОКА
НАЗНАЧЕНИЕ ТАЙМЕРА 555:
Здесь требуется таймер 555 для генерации тактовых импульсов определенной частоты (можно изменять с помощью потенциометра 220k), который определяет скорость шагового двигателя.
IC 555 Описание распиновки
НАЗНАЧЕНИЕ CD4017:
Как уже упоминалось выше, это декадный счетчик IC i.е., он может считать до 10 тактовых импульсов. Особенность этой ИС заключается в том, что в нее встроен собственный декодер. Благодаря этому вам не нужно добавлять дополнительную микросхему для декодирования двоичных чисел.
4017 считает до 10 тактовых импульсов от таймера 555 и выдает высокий выходной сигнал, соответствующий каждому тактовому импульсу один за другим на своих 10 выходных контактах. Одновременно высокий только один контакт.
НАЗНАЧЕНИЕ ТРАНЗИСТОРОВ:
Здесь транзисторы имеют два назначения:
1. Транзисторы действуют здесь как переключатели, таким образом запитывая одну катушку за раз.
2. Транзисторы пропускают через них большой ток, а затем через двигатель, тем самым полностью исключая таймер 555, так как он может подавать очень небольшое количество тока.
СХЕМА:
Выполните соединения, как показано на рисунке.
1. Подключите контакт 3 или выходной контакт таймера 555 к контакту 14 (тактовый контакт) IC 4017.
2. Подключите разрешающий контакт или 13-й контакт 4017 к земле.
3. Подключите контакты 3,2,4,7 один за другим к транзисторам 1,2,3,4 соответственно.
4. Подключите 10 и 15 вывод к земле через резистор 1 кОм.
5. Подключите общий провод шагового двигателя к плюсу питания.
6. Подключите другие провода шагового двигателя таким образом, чтобы катушки были под напряжением одна за другой для правильного выполнения одного полного оборота. (Вы можете посмотреть данные двигателя, предоставленные производителем)
ПОЧЕМУ ВЫХОДНОЙ КОНТАКТ 10 ИС 4017 ПОДКЛЮЧЕН К ЕГО КОНТАКТУ 15 (ПИН СБРОСА)?
Как уже упоминалось выше, 4017 считает тактовые импульсы один за другим до 10-го тактового импульса и соответственно выдает высокий выходной сигнал на выходных контактах, каждый выходной контакт становится высоким.
Это вызывает некоторую задержку вращения двигателя, в которой нет необходимости. Поскольку нам требуются только первые четыре контакта для одного полного оборота двигателя или первые четыре десятичных отсчета от 0 до 3, контакт № 10 подключен к выводу 15, так что после 4-го отсчета ИС сбрасывается и счет начинается заново. Это гарантирует отсутствие прерывания вращения двигателя.
РАБОТАЕТ:
После правильного подключения, если вы включите контур, двигатель начнет пошагово вращаться. Таймер 555 выдает тактовые импульсы в зависимости от номиналов резистора, потенциометра и конденсатора.
Если вы измените значение любой из этих трех составляющих, частота тактового импульса изменится.
Эти тактовые импульсы подаются на микросхему IC CD 4017, которая затем считает тактовые импульсы один за другим и выдает 1 в качестве выходного сигнала на вывод 3,2,4,7 соответственно и непрерывно повторяет этот процесс.
Поскольку транзистор Q1 подключен к контакту 3, он включается сначала, затем транзистор Q2, затем Q3 и Q4. Но когда один транзистор включен, все остальные остаются выключенными.
Когда Q1 включен, он действует как замкнутый переключатель, и ток течет через общий провод к проводу 1, а затем на землю через транзистор Q1.
Это возбуждает катушку 1, и двигатель вращается на некоторый угол, который зависит от тактовой частоты. То же самое происходит с Q2, который возбуждает катушку 2, затем катушку 3 и катушку 4. Таким образом, получается один полный оборот.
При вращении потенциометра:
Допустим, изначально положение потенциометра таково, что между разрядом и пороговым штифтом есть максимальное сопротивление (220 кОм). Формула для частоты выходного тактового импульса:
F = 1,44 / (R1 + 2R2) C1
Из формулы ясно, что частота тактовых импульсов уменьшается с увеличением значения R2.Таким образом, когда R2 или значение потенциометра является максимальным, частота минимальна, из-за чего IC 4017 считает медленнее и дает более задержанный выходной сигнал.
По мере уменьшения значения сопротивления R2 частота увеличивается, что вызывает минимальную задержку между выходами IC 4017. Следовательно, шаговый двигатель вращается быстрее.
Таким образом значение потенциометра определяет скорость шагового двигателя.
ВИДЕО ДЛЯ МОДЕЛИРОВАНИЯ:
Здесь вы можете ясно увидеть, как скорость двигателя зависит от сопротивления R2. Его значение сначала уменьшается, а затем увеличивается, что, в свою очередь, сначала увеличивает, а затем снижает скорость шагового двигателя.
Шаговый контроллер DIY — Введение | PyroElectro
Информация о проектеАвтор: Крис
Сложность: Средняя
Затраченное время: 3 часа
Предпосылки:
Взгляните на вышеупомянутый
учебные пособия перед продолжением
прочитать этот учебник.
Шаговый двигатель — это очень точный и простой в использовании двигатель, который отлично подходит как для начинающих, так и для начинающих. продвинутые любители. Точность, которую обеспечивают шаговые двигатели за счет уникального «шагового» метода движения, позволяет нам всегда знать, где находится двигатель, без какой-либо обратной связи или схема кодирования.
Понимание того, как построить правильную схему управления для шагового двигателя, имеет жизненно важное значение.Зная, сколько тока будет потребляться двигателем, и запланированное напряжение системы имеет важное значение. На протяжении всего этого руководства мое системное напряжение будет составлять 12 В для двигателей, а потребляемый ток не будет превышают 300 мА. Шаговые двигатели могут потреблять большой ток, поэтому проверьте спецификации того, что вы используете. Полная плата контроллера шагового двигателя DIY
Демонстрационная установка
Цель и обзор этого проекта
Целью этого проекта является создание платы, специально предназначенной для управления шаговым двигателем с двумя катушками.Доска должен иметь 4 порта клеммной колодки для 4 проводов шагового двигателя и 4 входных порта для контроллера L297.
Плата должна надежно контролировать шаги, которые выполняет двигатель. Каждый тактовый импульс в цепи выполнит ровно 1 тактный цикл двигателя.
Amazon.com: Комплект для сборки контроллера 3D-принтера, RAMPS 1.4 + плата 2560 R3 + 5 шт. Драйвер шагового двигателя A4988 и радиатор для Arduino RepRap: Industrial & Scientific
Ориентировочная общая стоимость: 58 долларов США.09 , включая залог за доставку и импорт в Российскую Федерацию Подробности
- Убедитесь, что это подходит введя номер вашей модели.
- Подходит для Reprap, есть возможность добавить карту памяти.
- Световой индикатор показывает, когда выход нагревателя включен, безопаснее и расширяемо для управления другими аксессуарами.
- Плата для Pololu находится в штыревом гнезде и может быть легко заменена или снята для использования в будущем.
- Модульная конструкция включает в себя подключаемые шаговые драйверы и управляющую электронику экструдера на щите Mega, что упрощает обслуживание, замену деталей, возможность модернизации и расширения.
- В систему можно добавить несколько плат расширения, если основная плата RAMPS находится в верхней части стека.
Характеристики
| Тип основы | дефолт |
|---|---|
| Фирменное наименование | Thincol |
| Ean | 8888841204168 |
| Номер детали | Thincolsifc24z756 |
| Код UNSPSC | 26111500 |
