Как работает электронный счетчик витков для намоточного станка. Какие преимущества дает использование электронного счетчика по сравнению с механическим. Какие компоненты нужны для создания электронного счетчика витков.
Принцип работы электронного счетчика витков
Электронный счетчик витков для намоточного станка представляет собой устройство, которое автоматически подсчитывает количество оборотов вала станка при намотке обмоток трансформаторов, катушек индуктивности и других компонентов. Основные элементы такого счетчика:
- Датчик оборотов (чаще всего герконовый или на основе датчика Холла)
- Микроконтроллер для обработки сигналов с датчика и подсчета витков
- Дисплей для отображения количества намотанных витков
- Кнопки управления (сброс, запись в память и т.д.)
- Источник питания (обычно батарейный)
Принцип работы электронного счетчика следующий:
- На вал намоточного станка устанавливается магнит
- При каждом обороте вала магнит проходит мимо датчика, вызывая срабатывание
- Микроконтроллер обрабатывает сигналы с датчика и увеличивает счетчик витков
- Текущее значение счетчика выводится на дисплей
Преимущества электронного счетчика перед механическим
Электронный счетчик витков имеет ряд существенных преимуществ по сравнению с механическими аналогами:

- Высокая точность подсчета даже на больших скоростях намотки
- Возможность реверсивного счета (вычитание витков при обратном вращении)
- Сохранение результатов в энергонезависимой памяти
- Удобный цифровой дисплей для отображения количества витков
- Дополнительные функции (запоминание промежуточных результатов, расчет длины провода и т.д.)
- Компактные размеры и простота монтажа на станок
Ключевые компоненты для сборки электронного счетчика
Для самостоятельной сборки электронного счетчика витков потребуются следующие основные компоненты:
- Микроконтроллер (например, ATmega8, PIC16F628 или STM8)
- Датчик оборотов (герконовый или на эффекте Холла)
- Цифровой дисплей (семисегментный или LCD)
- Кнопки управления
- Стабилизатор напряжения
- Печатная плата для монтажа компонентов
При выборе компонентов важно учитывать напряжение питания, потребляемый ток и другие параметры для обеспечения длительной автономной работы устройства.
Варианты реализации электронного счетчика витков
Существует несколько популярных вариантов реализации электронного счетчика витков для намоточного станка:

1. На базе ATmega8 с LCD дисплеем Nokia 5110
Этот вариант использует недорогой и доступный микроконтроллер ATmega8 в сочетании с графическим LCD дисплеем от телефона Nokia 5110. Основные особенности:
- Питание от 3В (две батарейки АА)
- Возможность отображения дополнительной информации на графическом дисплее
- Простота программирования микроконтроллера AVR
2. На базе PIC16F628 с семисегментным индикатором
Вариант с использованием популярного микроконтроллера PIC и классического семисегментного дисплея. Ключевые особенности:
- Компактные размеры устройства
- Низкое энергопотребление
- Простота схемотехники
3. На базе STM8 с ЖК индикатором
Реализация на современном 8-битном микроконтроллере STM8 с использованием специализированного ЖК индикатора. Преимущества:
- Высокая производительность микроконтроллера
- Возможность реализации дополнительных функций
- Хорошая читаемость ЖК дисплея
Программирование микроконтроллера для счетчика витков
Программа для микроконтроллера электронного счетчика витков должна выполнять следующие основные функции:
- Обработка прерываний от датчика оборотов
- Подсчет количества витков с учетом направления вращения
- Вывод информации на дисплей
- Обработка нажатий кнопок управления
- Сохранение данных в энергонезависимой памяти
Пример простого алгоритма работы счетчика витков:
- Инициализация устройства при включении питания
- Бесконечный цикл:
- Проверка срабатывания датчика оборотов
- Увеличение или уменьшение счетчика витков
- Обновление информации на дисплее
- Проверка нажатия кнопок управления
- При необходимости — сохранение данных в EEPROM
Монтаж электронного счетчика на намоточный станок
При установке электронного счетчика витков на намоточный станок необходимо учитывать следующие моменты:
- Надежное крепление датчика оборотов и магнита на валу станка
- Защита электронной платы от пыли и механических повреждений
- Удобное расположение дисплея и кнопок управления
- Возможность быстрого демонтажа счетчика при необходимости
Часто для монтажа используется небольшой пластиковый корпус, в котором размещается вся электроника. Такой корпус крепится на стойку станка с помощью винтов или двустороннего скотча.
Калибровка и настройка электронного счетчика
Для обеспечения точной работы электронного счетчика витков может потребоваться его калибровка и настройка. Основные этапы этого процесса:
- Проверка корректности срабатывания датчика оборотов
- Настройка чувствительности и устранение дребезга контактов (для герконового датчика)
- Калибровка счетчика путем намотки известного количества витков
- Проверка работы функции реверсивного счета
- Настройка яркости и контрастности дисплея
Важно периодически проверять точность работы счетчика, особенно при смене типа наматываемого провода или изменении скорости намотки.
Дополнительные функции электронного счетчика витков
Современные электронные счетчики витков могут обладать рядом дополнительных полезных функций:
- Расчет длины намотанного провода
- Измерение скорости намотки
- Запоминание нескольких предустановленных значений количества витков
- Звуковая сигнализация при достижении заданного количества витков
- Интерфейс для подключения к компьютеру и ведения статистики намотки
Реализация этих функций зависит от возможностей выбранного микроконтроллера и сложности программного обеспечения.

Счётчик витков для намоточного станка
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает — от тут и началось! Поиск по интернетам дал некоторые возможные варианты станко-построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, а также герконы с калькуляторами. Хм …. На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
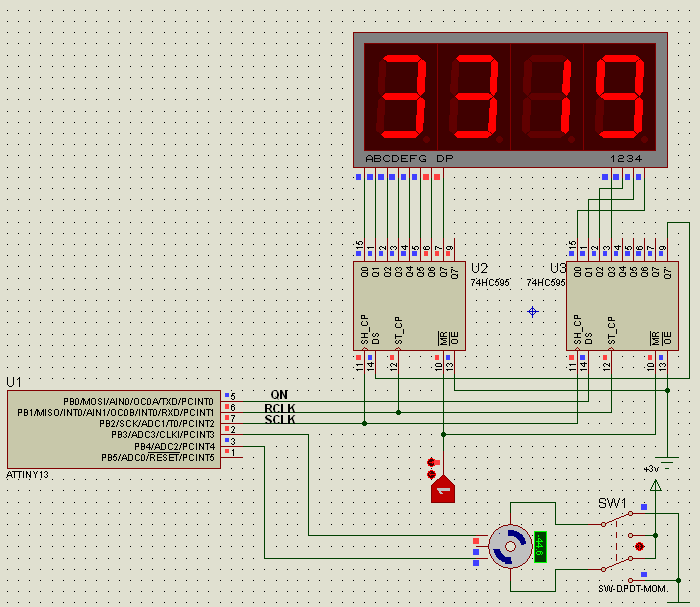
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой – это ж не много – не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 – наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 – эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 – наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 – эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
и собрал на макетке:
О кнопках сразу не сказал – а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 – включает режим намотки (режим установлен по умолчанию) – с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 – режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» — в минус сматываться не будет 🙂
S4 – чтение сохраненной в EEPROM информации.
S5 – запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла – 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
С датчика холла TLE4905L (можно попробовать и другой воткнуть, я выбирал по принципу «что подешевле и есть в наличии») сигнал поступает на контроллер, генерируется прерывание и изменяется текущее значение, в зависимости от выбранного режима. Контроллер отсылает информацию на сдвиговые регистры, с которых она, в свою очередь, отправляется на семисегментные индикаторы либо на клавиатуру. Семисегментники применял с общим катодом, у меня был сразу квартет в одном корпусе, но желающим никто не мешает прикрутить 2 сдвоенных или 4 одиночных соединив параллельно аноды. Точка на индикаторах не используется, соответственно вывод H (dp) висит в воздухе. Работают индикаторы в динамическом режиме, поэтому сопротивления в R3-R9 номиналом меньше расчётных. На транзисторах VT1-VT4 собраны драйверы для индикаторов. Можно было применить и специализированные микросхемы типа ULN2803, но решил на транзисторах, по той простой причине, что у меня их скопилось – «как грязи», некоторым из них лет больше чем мне.
Точка на индикаторах не используется, соответственно вывод H (dp) висит в воздухе. Работают индикаторы в динамическом режиме, поэтому сопротивления в R3-R9 номиналом меньше расчётных. На транзисторах VT1-VT4 собраны драйверы для индикаторов. Можно было применить и специализированные микросхемы типа ULN2803, но решил на транзисторах, по той простой причине, что у меня их скопилось – «как грязи», некоторым из них лет больше чем мне.
Кнопки S2-S4 – а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать – береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
IC1 – микроконтроллер ATtiny13, можно применить с литерой V. Распиновка для варианта в SOIC-е такая же как на схеме. Если у кого то возникнет желание применить в корпусе QFN/MLF – тому даташит в руки.
IC2-IC3 – 8-ми разрядные сдвиговые регистры с защелкой на выходе — 74HC595, на макете я использовал в корпусах DIP на плате в готовом устройстве в SOIC-е. Распиновка одинаковая.
IC4 – цифровой однополярный датчик холла TLE4905L. Обвязка по даташиту R2 – 1k2, C2-C3 по 4n7. При установке датчика на станок проверить на какую сторону магнита он реагирует.
C1, C4 и C5 – конденсаторы фильтрующие питание, я ставил по 100n, должны быть установлены, как можно ближе к питающим выводам микросхем.
R1 – резистором подтягиваем ногу ресет к питанию, 300Ом – и далее. Я ставил 1k.
R3-R9 – токоограничительные резисторы для индикаторов. 33 Ом – 100 Ом, чем больше сопротивление, тем соответственно тусклее будут светить.
R10-R13 – ограничивают ток в цепях баз транзисторов. На макете стояли по 510 Ом, в плату вкрутил по 430 Ом.
VT1-VT4 – КТ315 с любыми буквенными индексами, можно заменить на КТ3102, КТ503 и аналоги.
R14-R15 как писалось выше для предотвращения «драки», думаю можно поставить от 1k и выше, но не задирать выше 4k7. При R16-R17 равных 300 Ом, суммарное сопротивление последовательно соединенных резисторов, не должно превышать 5k, в ходе моих экспериментов с повышением сопротивления выше 5k появлялись ложные срабатывания кнопок.
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство».
Плату разводил в SL, причем развел скорее всего не оптимально — подгонял под имеющиеся детали, лень мне было на рынок ехать покупать другие. В общем развел, напечатал на прозрачной односторонней пленке Lomond для черно-белых лазерных принтеров. Печатал в негативе, в 2х экземплярах. Негатив — потому как собирался ПП делать с помощью пленочного фоторезиста, а он в свою очередь NEGATIVE. А в 2х экземплярах — чтоб при совмещении получился максимально непрозрачный слой тонера. Нет у меня желания ещё и балон с аэрозолем TRANSPARENT 21 покупать.
Совмещаем фотошаблоны, выставляя «на просвет», чтоб идеально совместились отверстия закрепляем обычным степлером — к этой процедуре нужно подойти ответственно, от неё во многом зависит качество будущей платы.
Теперь надо подготовить фольгированный текстолит. Кто-то трет его мелкой шкуркой, кто-то ластиком, а я, в последнее время, предпочитаю следующие варианты:
1. Если медь не шибко засрата окислами, достаточно её протереть тампоном смоченым в нашатырном спирте — ох и вонючая херня доложу я Вам, не нравится мне это занятие, но зато шустро. Идеально медь блистеть после этого не будет, но окислы спирт смоет и плата протравится.
2. Если же медь загажена порядочно, я её полирую войлочным кругом. Вешаю его на дрель и вуаля. Особо тут усердствовать не надо, пасту ГОИ я не применяю, для последующей протравки достаточно только войлочного круга. Быстро и эффективно.
В общем подготовили — фото выложить не могу, блистит зараза как зеркало и ничего не видно на фотке, фотограф из меня тож паршивый.
Ну да ладно, далее будем накатывать фоторезист.
Надо признать что фоторезист у меня уже вышел и срока годности и к плате собака липнуть отказывается, поэтому приходится предварительно плату греть. Я грею феном, но можно и утюгом. Хорошо бы конечно для этих целей ламинатор иметь, но:
— бабла мне на него теперь жалко
— когда бабла было не жалко было тупо лень 🙂
На горячую плату накатываем фоторезист, не забыв снять защитную пленку. Стараемся это делать максимально аккуратно, чтоб между платой и фоторезистом небыло воздушных пузырей. Бороться с ними потом — отдельная жопа. Если же пузыри все-таки появились, прокалываю их иглой.
Накатывать можно при любом освещении и не заниматься хернёй вспоминая любителей-фотографов, главное в нашем деле отсутствие солнечных лучей и других источников ультрафиолета.
После накатки, прогреваю плату горячим утюгом через газету, этим лечятся проколотые пузыри, ну и фоторезист прилипает намертво.
Далее накладываем шаблон на плату, здесь плата двухсторонняя, потому шаблон будет с обеих сторон платы. Кладём этот «бутерброд» на лист оргстекла и прижимаем воторым листом сверху. 2 листа нужны для того, чтоб после засветки одной стороны, можно было аккуратно перевернуть плату не сдвинув фотошаблон.
Засвечиваем с другой стороны. Я пользуюсь вот такой лампой:
Засвечиваю с растояния где-то 150мм в течении 7 минут (расстояние и время подбираются экспериментально).
После этой процедуры, рекомендуют оставить плату на 20 минут в темном месте и «задубить» в духовке. Я этого не делаю, за духовку можно люлей отгрести, а 20 минут ожидания — когда как, если не тороплюсь — могу и подождать.
Далее готовим слабый щелочной раствор — чайная ложка кальцинированной соды на пол литра воды. Температура воды — не принципиальна. Размешиваем чтоб растворилась вся сода. Для рук этот раствор не опасен, на ощупь как мыльная вода получается.
Снимаем с нашей платы защитную пленку и кидаем в раствор, после чего активно кисточкой начинаем тереть — но особо не нажимаем, чтоб не посдирать дорожки. Можно конечно и не тереть, но тогда есть вариант смываться фоторезист будет:
— долго
— смоется всё
а нам не то не другое не подходит, посему трем.
получаем что-то похожее:
Промываем плату водой, раствор не выливаем — он нам ещё пригодится. Если в процессе проявки платы какие-то дорожки всёж отслоились либо воздушные пузыри дорожки подпортили, необходимо эти места подретушировать цапонлаком либо специальным маркером. Далее травим плату. Я пользую хлорное железо.
После травления опять промываем плату водой и кидаем обратно в щелочной раствор, чтоб смыть более не нужный фоторезист. Часика хватает.
Далее лудим. Для маленьких плат или шибко ювелирных пользуюсь сплавом Розе, для таки вот плат — тупо паяльником с плоским жалом размазываю олово по плате. Плату в этом случае имеет мысл покрыть флюсом, я пользуюсь обычным спирто-канифольным.
Кому-то может показаться что дорожки вышли не шибко ровными — дорожки вышли ровными 🙂 это издержки метода лужения паяльником, олово не равномерно ложится.
Ну собственно и все, финишная прямая, запаиваем детальки:
Как-то так получилось, платку для датчика холла делал по технологии «лазеоного утюга».
Насчёт прошивки … на плате не предусмотрен разъём для программирования в целях экономии места. Прошивал по SPI протоколу примерно так:
Пробовал программаторы, HVProg, AVR910 и USBAsp – все прошили контроллер без проблем.
Ну и собранный конечный вариант:
В законченом варианте кнопка сброса отсутствует — ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания — защита от переполюсовки. Что касается остальных деталек – то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся 🙂
Теперь точно всё, всем спасибо за внимание, а товарищам GP1 и Avreal за помощь в разработке.
ПП + прошивка
Самодельные счетчики для намоточного станка. Запоминающий реверсивный счётчик витков — Готовые устройства — Каталог статей — Микроконтроллеры
Сайт находится в тестовом режиме. Приносим извинения за сбои и неточности.
Просим Вас писать нам о неточностях и проблемах через форму обратной связи.
Электронный счетчик витков для намоточного станка.
В число наиболее простых и тем не менее очень нужных технологических приспособлений, самостоятельное изготовление которых под силу даже малоопытным радиолюбителям, входит ручной намоточный станок. Это — стальной вал с резьбой М6, вращающийся в двух стойках; на одном его конце укреплена рукоятка для вращения. Стойки привинчены к массивному основанию. Чтобы не считать самому число оборотов вала — число витков обмотки, — обычно станок оснащают механическим счетчиком. Однако удобный миниатюрный счетчик оборотов с возможностью обнуления показаний был и остается дефицитом. Альтернативой механическому счетчику может служить электронный, описанный в этой статье. Предлагаемый реверсивный электронный счетчик собран на девяти КМОП-микросхемах (К561ТЛ1, 4 х К561ИЕ14, 4 х К176ИД2), транзисторе КТ315Б и четырехразрядном ЖК-индикаторе ИЖЦ5-4/8. Датчик импульсов вращения выполнен на основе двух герконов, замыкающихся при прохождении вблизи них постоянного магнита, закрепленного на поводке, установленном на валу станка. Устройство считает число оборотов вала от 0 до 9999. Даны чертежи печатных плат, на одной из которых монтируют ЖК индикатор, а на другой — все остальные детали счетчика.
Счётчик витков для намоточного станка
Когда-нибудь мотать трансформаторы вручную надоедает, и вот ты уже криво пилишь досочки бывшего шкафа для постройки намоточного станка. Станки эти бывают разными: с ручным приводом или с электрическим, с укладчиком витков и без. Но все их объединяет одно: необходимость счётчика витков. Это прекрасное дополнение позволит с комфортом наматывать многовитковые обмотки, как то, например, сетевые — под 1000 витков или первички выходных трансформаторов — под 3000. Хороший счётчик должен уметь считать в обоих направлениях: если ты решишь смотать часть витков, он должен вычесть их из подсчитанного количества. А если ты решишь мотать понемногу каждый день, то нужно бы запоминать, сколько уже намотал, чтобы потом продолжить с этого же места. Ну, и, разумеется, вся конструкция должна быть простейшей, на самых доступных деталях.
Как думаешь, быстро ли мы нашли такую? Правильно, нет. Конечно, понаделано всякого на атмегах с двухстрочными ЖК-дисплеями, но это же не бортовой компьютер! К тому же, некоторые счётчики витков просто не умеют считать назад.
И вот, наконец, нужная конструкция была найдена! Её придумал и воплотил Владимир, страница с авторским описанием:
Счётчик построен на распространённом микроконтроллере PIC16F628A. Четыре разряда количества витков отображаются семисегментным индикатором. Таким образом, можно мотать до 9999 витков, что актуально при намотке выходных трансформаторов. Имеются две кнопки: сброс и запоминание. В качестве датчиков используются два геркона. На валу станка необходимо просто прикрепить магнит.
В авторском варианте используется индикатор с общим катодом какой-то неведомой распиновки. Нам пришлось переделать как плату, под более широкий индикатор, так и прошивку, под индикатор с общим анодом. Но авторский вариант был проверен в симуляторе, работает хорошо.
У этого счётчика есть одна особенность: он считает при скорости не менее одного изменения состояния герконов за пять секунд. Поэтому если ты медленно и аккуратно что-то подматываешь, то есть шанс, что он этот виток не посчитает. Но вероятность такого невелика, так что можно пользоваться.
Вероятно, конструкцию можно переделать с герконов на оптику, если кому нужно, или даже на механические контакты — дребезг подавляется программно.
Понадобилось мне в один прекрасный день намотать катушки, и сразу же возник вопрос как считать витки, а в уме считать не хотелось. Вот и пришла мысль соорудить счетчик из калькулятора.
Для этого понадобился лежавший без дела китайский калькулятор, кнопка, пара проводков и изготовленный из куска пластика кулачек для нажатия на кнопку.
Над так называемым «станком» прошу не смеяться: я катушки наматываю редко, даже не знаю, когда это будет в следующий раз. Поэтому собрал всё на скорую руку и не стал городить что-то грандиозное.
Пара уголков, стержень с резьбой, гайки, шайбы разных размеров — всё это в изобилии в ближайшем магазине крепежа по очень демократичным ценам.
Стержень с каркасом катушки свободно вращается в отверстиях уголков.
Очевидное усовершенствование для регулярного применения — напрашивается геркон вместо механической кнопки и магнит на кулачке. Получим бесконтактный датчик оборотов.
Изготовленный пластиковый кулачок и обнаруженная тактовая кнопка.
Провода подпаиваем к выводам кнопки [=] (их нужно найти и зачистить на калькуляторе),
а другие концы на кнопку.
В итоге получается вот такая конструкция
При намотке первого витка устанавливаем кулачек за срабатывание кнопки
На калькуляторе набираем
Начинаем намотку, кулачек проходит оборот и нажимает на кнопку, на калькуляторе светится цифра 1,
И так далее: при каждом обороте прибавляется 1.
1+1=2
2+1=3…
Вот что получается постепенно:
Давно хотел собрать счетчик витков для ручного намоточного станка. Хотелось сделать устройство с батарейным питанием от двух микропальчиковых батарей, потребляющее мало энергии в рабочем режиме, имеющее простое кнопочное управление-«Сброс», «Вкл/Выкл». Счетчик должен уметь реверсно считать. Иногда приходится отматывать витки, или бывают не штатные ситуации.
В наличии были STM8S003F3P6 и STM8L051F3P6 в корпусах TSSOP-20. Выяснилось что S003 не годится для моей задумки-у нее питания 3-5в, и скорее всего при 50% разряде 3вольтовой батареи микроконтроллер работать не будет. Поэтому выбор пал на STM8L051F3P6. По даташиту питание у нее от 1,8 до 3,6в. В качестве дисплея решено было использовать МT-10T7 Российского производителя МЭЛТ. Данный ЖК был куплен лет 7 назад, с тех пор достойного применения так и не нашел.Выкинуть его было жалко.
Поговорим о датчике.Сначала я использовал интегральные датчики Холла,формирующие логический сигнал на выходе. Достались с платы подводного фонаря. Оказалось, что они перестают срабатывать уже при небольшом числе оборотов. Это меня огорчило. Пришлось изобретать свой велосипед. Решил использовать датчики холла от мотора cd-rom привода и ОУ lm358. Крайне сомнительно была работа этой затеи от 3в. Но попытка не пытка. На мое удивление схема отлично заработала при таком питании.
Схема проще не придумаешь. R5-задает ток через датчики Холла U1,U2. На DA1, сделан усилитель с КУ=50. Сигналы с выходов DA1 не соответствуют логическим уровням STM8,поэтому к его выходам подключены транзисторы Q1,Q2 представляющие преобразователя уровней.Входы микроконтроллеров подтянуты через резисторы к плюсу,поэтому дополнительный огород городить не стал. Зачем на плате предусмотрены элементы С1,С2-уже и не помню.Очевидно собирался бороться с помехами. Транзисторы на самом деле bc817-40. Но и те что на схеме должны работать. Датчики холла hw-101A(маркировка D).
Питание на датчик, и дисплей приходят с вывода PB1 микроконтроллера. Нагрузочной способности для этих целей более чем достаточно.
R1 это перемычка. Номинала 0 Ом у меня не нашлось,поэтому поставил самый мелкий что был.
Максимальное значение для счета это 65535. Кнопка «RESET» используется для сброса показаний счетчика, «ON/OFF» -вкл/выкл устройства.
Печатную плату можно назвать скорее отладочной.
Фото готового устройства.
В качестве датчика оборотов выступает стеклотекстолитовый диск, с приклеенным на нем ниодиевым магнитом диаметром 5мм,толщиной 1мм, и плата с датчиками Холла.Растояние между магнитом и датчиками около 5мм. Половина знакомест на дисплее осталась не задействована. Ни чего умнее не придумал-как показывать там напряжение питания. Контрастности индикатора не достаточно,поэтому пришлось наклонить всю плату под 45градусов. На фото датчик прикреплен скотчем, потом я его прикрепил несколькими витками изоленты. Конструкция получилась не шибко эстетичной, но этого мне вполне достаточно. Сам намоточный станок-ничто иное как старый механизм для перемотки кинопленки.Ни знаю какие манипуляции он был призван производить, но на него надевается бобина с пленкой. Индикатор,батарейный отсек, плата микроконтроллера приклеены к куску текстолита термоклеем.
Потребляемый ток во включенном состоянии 12,8мA , в выключенном 1,71мкА.
Программное обеспечение.
Код написан в среде IAR Embedded Workbench IDE. Микроконтроллер работает от встроенного RC генератора HSI с частотой 16мгц. Подсчетом числа витков занимается таймер общего назначения TIM2. Он имеет 16битный счетный регистр, и возможность работы с экодером(encoder mode). Это существенно облегчает задачу. Достаточно настроить таймер, и забыть. Он сам по себе будет считать значения, и реализовывает возможности реверсного счета. Правда из-за особенностей работы этого режим значения в регистре счетчика- в два раза больше реальных.
Конечно же значения из TIM2 нужно как то извлекать, и выводить на экран. Этим занимается 8битный TIM4, генерирующий прерывания, по которому происходит эта операция. Прерывания приходят каждые 8мс. В обработчик добавлен опрос кнопки «сброс»,и манипуляции по выводу информации от АЦП и TIM2 на экран.
Измерением напряжения батареи занимается АЦП. Вход опорного напряжения, внутри соединен с плюсовым источником питания микроконтроллера. Выбрать внутренний источник нельзя(как это например сделано в AVR). Зато можно измерить напряжение этого самого источника. Напряжение источника VREF измерено на заводе и записано в VREFINT_Factory_CONV byte,его можно считать.
Что бы основной программе не было скучно, она смотрит-не завершено ли преобразование АЦП и на основе 16 выборок вычисляет среднее.
Включение/выключение схемы реализовано на основе внешнего прерывания по нажатию на кнопку. По приходу прерывания меняем переменную, и сидим ждем пока кнопку отпустят.
Если пользователь хочет выключить устройство,то основная программа сохраняет значение счетного регистра TIM2 в ОЗУ. Все не задействованные выводы делает выходами,устанавливает на них нуль. Если этого не сделать у меня ловит помехи. Отключаем источник эталонного напряжения VREF и АЦП и засыпаем. Использован самый экономичный режим halt. Проснется микроконтроллер от нажатия кнопки «On»,по внешнему прерыванию(External interrupts).
Прошивка микроконтроллера.
Это отдельная история. Когда покупал STM32F0 Discovery, думал что программатор на ней умеет шить STM8.Оказалось что нет. Тратить деньги на отдельный программатор не хотелось, а возможности прошивки по USART меня не впечатлила(да и не всё 8битное семейство умеет это).
Вариант 1: ATmega8 + Nokia 5110 LCD + питание 3V
В схеме используются Atmega8-8PU (внешний кварц частотой 8MHz), Nokia 5110 LCD и транзистор для обработки импульсов от геркона. Регулятор напряжения на 3,3V обеспечивает питание для всей цепи.
Все компоненты были смонтированы на макетной плате, включая разъемы для: ISP — программатора (USBAsp), 5110 Nokia LCD, питания (5V, подаваемого на 3.3V — регулятор), геркона, кнопки сброса и 2-контактный разъем, используемый для считывания полярности обмотки двигателя привода станка, чтобы знать, увеличивать или уменьшать счетчик.
Назначение разъемов:
J1: Питание. На разъем поступает 5V и дальше на стабилизатор L7833 для получения напряжения 3,3V, используемого ATmega8 и LCD.
J2: Разъем для ЖК-дисплея, идущий на Nokia 5110 LCD.
J3: Геркон. Вход импульсов для подсчета микроконтроллером.
J4: Разъем полярности. Он должен быть подключен параллельно обмотке двигателя. Схема слежения была расчитана для 12-вольтового двигателя, но ее можно применить под другое напряжение двигателя, регулируя номиналы делителей напряжения, образованные R3-R4 и R5-R6. Если двигатель подключен к прямой полярности, на PD0 будет высокий лог. уровень, если двигатель подключен к обратной полярности, то на PD1 будет высокий лог. уровень. Эта информация используется в коде для увеличения или уменьшения счетчика.
J5: Сброс счетчика. При нажатии кнопки, произойдет обнуление счетчика.
Разъем ISP: это 10-контактный разъем для программатора USBAsp AVR.
Схема устройства
Фото готового устройства
Вариант 2: ATmega8 + 2×16 HD44780 LCD + питание 5V
Некоторые из моих читателей попросили сделать вариант счетчика в котором используется дисплей 2×16 HD44780 (или меньший вариант 1×16). Для этих дисплеев требуется напряжение питания 5V, поэтому стабилизатор на 3,3V не актуален.
Схема устройства
Биты конфигурации микроконтроллера для обоих вариантов: LOW — 0xFF, HIGH — 0xC9.
| Архив для статьи «Счетчик витков для намоточного станка» | |
| Описание:
Исходный код(Си), файлы прошивок для микроконтроллера |
|
| Размер файла: 111.35 KB Количество загрузок: 257 |
Вса 97 счетчик витков не считает. Инструкция по изготовлению намоточного станка. Метод работы намоточного станка
Счётчик витков для намоточного станка
Когда-нибудь мотать трансформаторы вручную надоедает, и вот ты уже криво пилишь досочки бывшего шкафа для постройки намоточного станка. Станки эти бывают разными: с ручным приводом или с электрическим, с укладчиком витков и без. Но все их объединяет одно: необходимость счётчика витков. Это прекрасное дополнение позволит с комфортом наматывать многовитковые обмотки, как то, например, сетевые — под 1000 витков или первички выходных трансформаторов — под 3000. Хороший счётчик должен уметь считать в обоих направлениях: если ты решишь смотать часть витков, он должен вычесть их из подсчитанного количества. А если ты решишь мотать понемногу каждый день, то нужно бы запоминать, сколько уже намотал, чтобы потом продолжить с этого же места. Ну, и, разумеется, вся конструкция должна быть простейшей, на самых доступных деталях.
Как думаешь, быстро ли мы нашли такую? Правильно, нет. Конечно, понаделано всякого на атмегах с двухстрочными ЖК-дисплеями, но это же не бортовой компьютер! К тому же, некоторые счётчики витков просто не умеют считать назад.
И вот, наконец, нужная конструкция была найдена! Её придумал и воплотил Владимир, страница с авторским описанием:
Счётчик построен на распространённом микроконтроллере PIC16F628A. Четыре разряда количества витков отображаются семисегментным индикатором. Таким образом, можно мотать до 9999 витков, что актуально при намотке выходных трансформаторов. Имеются две кнопки: сброс и запоминание. В качестве датчиков используются два геркона. На валу станка необходимо просто прикрепить магнит.
В авторском варианте используется индикатор с общим катодом какой-то неведомой распиновки. Нам пришлось переделать как плату, под более широкий индикатор, так и прошивку, под индикатор с общим анодом. Но авторский вариант был проверен в симуляторе, работает хорошо.
У этого счётчика есть одна особенность: он считает при скорости не менее одного изменения состояния герконов за пять секунд. Поэтому если ты медленно и аккуратно что-то подматываешь, то есть шанс, что он этот виток не посчитает. Но вероятность такого невелика, так что можно пользоваться.
Вероятно, конструкцию можно переделать с герконов на оптику, если кому нужно, или даже на механические контакты — дребезг подавляется программно.
Вариант 1: ATmega8 + Nokia 5110 LCD + питание 3V
В схеме используются Atmega8-8PU (внешний кварц частотой 8MHz), Nokia 5110 LCD и транзистор для обработки импульсов от геркона. Регулятор напряжения на 3,3V обеспечивает питание для всей цепи.
Все компоненты были смонтированы на макетной плате, включая разъемы для: ISP — программатора (USBAsp), 5110 Nokia LCD, питания (5V, подаваемого на 3.3V — регулятор), геркона, кнопки сброса и 2-контактный разъем, используемый для считывания полярности обмотки двигателя привода станка, чтобы знать, увеличивать или уменьшать счетчик.
Назначение разъемов:
J1: Питание. На разъем поступает 5V и дальше на стабилизатор L7833 для получения напряжения 3,3V, используемого ATmega8 и LCD.
J2: Разъем для ЖК-дисплея, идущий на Nokia 5110 LCD.
J3: Геркон. Вход импульсов для подсчета микроконтроллером.
J4: Разъем полярности. Он должен быть подключен параллельно обмотке двигателя. Схема слежения была расчитана для 12-вольтового двигателя, но ее можно применить под другое напряжение двигателя, регулируя номиналы делителей напряжения, образованные R3-R4 и R5-R6. Если двигатель подключен к прямой полярности, на PD0 будет высокий лог. уровень, если двигатель подключен к обратной полярности, то на PD1 будет высокий лог. уровень. Эта информация используется в коде для увеличения или уменьшения счетчика.
J5: Сброс счетчика. При нажатии кнопки, произойдет обнуление счетчика.
Разъем ISP: это 10-контактный разъем для программатора USBAsp AVR.
Схема устройства
Фото готового устройства
Вариант 2: ATmega8 + 2×16 HD44780 LCD + питание 5V
Некоторые из моих читателей попросили сделать вариант счетчика в котором используется дисплей 2×16 HD44780 (или меньший вариант 1×16). Для этих дисплеев требуется напряжение питания 5V, поэтому стабилизатор на 3,3V не актуален.
Схема устройства
Биты конфигурации микроконтроллера для обоих вариантов: LOW — 0xFF, HIGH — 0xC9.
| Архив для статьи «Счетчик витков для намоточного станка» | |
| Описание:
Исходный код(Си), файлы прошивок для микроконтроллера |
|
| Размер файла: 111.35 KB Количество загрузок: 257 |
Но можно построить счетчик всего на одной микросхеме — универсальном программируемом микроконтроллере, имеющем в своем составе разнообразные периферийные устройства и способном решать очень широкий круг задач. Многие микроконтроллеры имеют особую область памяти — EEPROM. Записанные в нее (в том числе во время исполнения программы) данные, например, текущий результат счета, сохраняются и после отключения питания.
В предлагаемом счетчике применен микроконтроллер Attiny2313 из семейства AVR фирмы Almel. В приборе реализован реверсивный счет, вывод результата с гашением незначащих н
улей на четырехразрядный светодиодный индикатор, хранение результата в EEPROM при выключенном питании. Встроенный в микроконтроллер аналоговый компаратор использован для своевременного обнаружения уменьшения напряжения питания. Счетчик запоминает результат счета при отключении питания, восстанавливая его при включении, и аналогично механическому счетчику снабжен кнопкой обнуления показаний.
Схема счетчика представлена на рисунке. Шесть линий порта В (РВ2- РВ7) и пять линий порта D (PDO, PD1, PD4-PD6) использованы для организации динамической индикации результата счета на светодиодный индикатор HL1. Коллекторными нагрузками фототранзисторов VT1 и VT2 служат встроенные в микроконтроллер и включенные программно резисторы, соединяющие соответствующие выводы микроконтроллера с цепью его питания.
Увеличение результата счета N на единицу происходит в момент прерывания оптической связи между излучающим диодом VD1 и фототранзистором VT1, что создает нарастающий перепад уровня на входе INT0 микроконтроллера. При этом уровень на входе INT1 должен быть низким, т. е. фототранзистор VT2 должен быть освещен излучающим диодом VD2. В момент нарастающего перепада на входе INT1 при низком уровне на входе INT0 результат уменьшится на единицу. Другие комбинации уровней и их перепадов на входах INT0 и INT1 результат счета не изменяют.
По достижении максимального значения 9999 счет продолжается с нуля. Вычитание единицы из нулевого значения дает результат 9999. Если обратный счет не нужен, можно исключить из счетчика излучающий диод VD2 и фототранзистор VT2 и соединить вход INT1 микроконтроллера с общим проводом. Счет будет идти только на увеличение.
Как уже сказано, детектором снижения напряжения питания служит встроенный в микроконтроллер аналоговый компаратор. Он сравнивает нестабилизированное напряжение на выходе выпрямителя (диодного моста VD3) со стабилизированным на выходе интегрального стабилизатора DA1. Программа циклически проверяет состояние компаратора. После отключения счетчика от сети напряжение на конденсаторе фильтра выпрямителя С1 спадает, а стабилизированное еще некоторое время остается неизменным. Резисторы R2-R4 подобраны так. что состояние компаратора в этой ситуации изменяется на противоположное. Обнаружив это, программа успевает записать текущий результат счета в EEPROM микроконтроллера еще до прекращения его функционирования по причине выключения питания. При последующем включении программа прочитает число, записанное в ЕЕРРОМ, и выведет его на индикатор. Счет будет продолжен с этого значения.
Ввиду ограниченного числа выводов микроконтроллера для подключения кнопки SB1, обнуляющей счетчик, использован вывод 13, служащий инвертирующим аналоговым входом компаратора (AIM) и одновременно — «цифровым» входом РВ1. Делителем напряжения {резисторы R4, R5) здесь задан уровень, воспринимаемый микроконтроллером как высокий логический При нажатии на кнопку SB1 он станет низким. На состояние компаратора это не повлияет, так как напряжение на входе AIN0 по-прежнему больше, чем на AIN1.
При нажатой кнопке SB1 программа выводит во всех разрядах индикатора знак «минус», а после ее отпускания начинает счет с нуля. Если при нажатой кнопке выключить питание счетчика, текущий результат не будет записан в EEPROM, а хранящееся там значение останется прежним.
Программа построена таким образом, что ее легко адаптировать к счетчику с другими индикаторами (например, с общими катодами), с другой разводкой печатной платы и т. п. Небольшая коррекция программы потребуется и при использовании кварцевого резонатора на частоту, отличающуюся более чем на 1 МГц от указанной.
При напряжении источника 15 В измеряют напряжение на контактах 12 и 13 панели микроконтроллера относительно общего провода (конт.10). Первое должно находиться в интервале 4…4.5 В, а второе — быть больше 3,5 В, но меньше первого. Далее постепенно уменьшают напряжение источника. Когда оно упадет до 9… 10 В, разность значений напряжения на контактах 12 и 13 должна стать нулевой, а затем поменять знак.
Теперь можно установить в панель запрограммированный микроконтроллер, подключить трансформатор и подать на него сетевое напряжение. Спустя 1,5…2 с нужно нажать на кнопку SB1. На индикатор счетчика будет выведена цифра 0. Если на индикатор ничего не выведено, еще раз проверьте значения напряжения на входах AIN0.AIN1 микроконтроллера. Первое должно быть больше второго.
Когда счетчик успешно запущен, остается проверить правильность счета, поочередно затеняя фототранзисторы непрозрачной для ИК лучей пластиной. Для большей контрастности индикаторы желательно закрыть светофильтром из красного органического стекла.
Еще если кто будет собирать счётчик на Atiny2313 без кварца,
Фьюзы я запрограммировал так
исходник ASM
Прошивка
Сайт находится в тестовом режиме. Приносим извинения за сбои и неточности.
Просим Вас писать нам о неточностях и проблемах через форму обратной связи.
Электронный счетчик витков для намоточного станка.
В число наиболее простых и тем не менее очень нужных технологических приспособлений, самостоятельное изготовление которых под силу даже малоопытным радиолюбителям, входит ручной намоточный станок. Это — стальной вал с резьбой М6, вращающийся в двух стойках; на одном его конце укреплена рукоятка для вращения. Стойки привинчены к массивному основанию. Чтобы не считать самому число оборотов вала — число витков обмотки, — обычно станок оснащают механическим счетчиком. Однако удобный миниатюрный счетчик оборотов с возможностью обнуления показаний был и остается дефицитом. Альтернативой механическому счетчику может служить электронный, описанный в этой статье. Предлагаемый реверсивный электронный счетчик собран на девяти КМОП-микросхемах (К561ТЛ1, 4 х К561ИЕ14, 4 х К176ИД2), транзисторе КТ315Б и четырехразрядном ЖК-индикаторе ИЖЦ5-4/8. Датчик импульсов вращения выполнен на основе двух герконов, замыкающихся при прохождении вблизи них постоянного магнита, закрепленного на поводке, установленном на валу станка. Устройство считает число оборотов вала от 0 до 9999. Даны чертежи печатных плат, на одной из которых монтируют ЖК индикатор, а на другой — все остальные детали счетчика.
Счётчик на микроконтроллере довольно прост для повторения и собран на популярном МК PIC16F628A с выводом индикации на 4 семисегментных светодиодных индикатора. Счётчик имеет два входа управления: «+1» и «-1», а также кнопку «Reset». Управление схемой нового счётчика реализовано таким образом, что как бы долго или коротко не была нажата кнопка входа, счёт продолжится только при её отпускании и очередном нажатии. Максимальное количество поступивших импульсов и соответственно показания АЛС — 9999. При управлении на входе «-1» счёт ведётся в обратном порядке до значения 0000. Показания счётчика сохраняются в памяти контроллера и при отключении питания, что сохранит данные при случайных перебоях питающего напряжения сети.
Принципиальная схема реверсивного счётчика на микроконтроллере PIC16F628A:
Сброс показаний счётчика и одновременно состояния памяти в 0, осуществляется кнопкой «Reset». Следует помнить, что при первом включении реверсивного счётчика на микроконтроллере, на индикаторе АЛС может высветиться непредсказуемая информация. Но при первом же нажатии на любую из кнопок информация нормализируется. Где и как можно использовать эту схему — зависит от конкретных нужд, например установить в магазин или офис для подсчёта посетителей или как индикатор намоточного станка. В общем думаю, что этот счётчик на микроконтроллере кому-нибудь принесёт пользу.
Если у кого-то под рукой не окажется нужного индикатора АЛС, а будет какой-нибудь другой (или даже 4 отдельных одинаковых индикатора), я готов помочь перерисовать печатку и переделать прошивку. В архиве на форуме схема, плата и прошивки под индикаторы с общим анодом и общим катодом. Печатная плата показана на рисунке ниже:
Имеется также новая версия прошивки для счётчика на микроконтроллере PIC16F628A. при этом схема и плата счётчика остались прежними, но поменялось назначение кнопок: кнопка 1 — вход импульсов (например, от геркона), 2 кнопка включает счёт на вычитание входных импульсов, при этом на индикаторе светится самая левая точка, 3 кнопка — сложение импульсов — светится самая правая точка. Кнопка 4 — сброс. В таком варианте схему счётчика на микроконтроллере можно легко применить на намоточном станке. Только перед намоткой или отмоткой витков нужно сначала нажать кнопку «+» или «-«. Питается счётчик от стабилизированного источника напряжением 5В и током 50мА. При необходимости можно питать от батареек. Корпус зависит от ваших вкусов и возможностей. Схему предоставил — Samopalkin
Намоточный станок своими руками с натяжением
Устройства для наматывания медного провода часто используются в работе электриков и радиолюбителей. В качестве основы для провода используют специальную катушку. При проведении работы в промышленности процесс требует точности и скорости. В домашних мастерских намоточный станок также может применяться для проведения рассматриваемой работы.
Метод работы намоточного станка
На сегодняшний день намоточный станок считается весьма востребованным оборудованием, при его применении проводится создание однослойных и многослойных катушек трансформаторного типа. За счет подобного механизма можно равномерно распределить проволоку на подготовленные барабаны. Выделяют ручные и автоматические варианты исполнения станков, оба работают по схожему признаку:
- Основное вращение может передаваться от установленного электрического привода или механической рукоятки. В случае рукоятки она крепится на вал, который также используется для крепления барабана.
- Укладка проволоки упрощается за счет специального направляющего элемента. Именно он также обеспечивает равномерность распределения мотков.
- Специальный счетчик может определять количество витков, которые укладываются на барабан. При изготовлении самодельных конструкций в качестве счетчика может использоваться велосипедный спидометр.
Устройство намоточного станка
Применение специального механизма позволяет проводить рядовую и тороидальную, перекрестную укладку проволоки. Электрический вариант исполнения характеризуется высокой эффективностью, вращение передается от электрического двигателя через ременную передачу и шкивы. Фрикционная муфта делает работу более плавной, что исключает вероятность обрыва.
Современные варианты исполнения оснащены цифровым оборудованием. Установленные блоки памяти могут не только считать количество витков, но и запоминать эту информацию.
Механизм намоточного станка
Рассматривая ручной намоточный станок нужно учитывать, что в продаже есть несколько различных вариантов конструкции: рядовой, тороидальный и универсальный. Все варианты исполнения характеризуются определенными особенностями, которые нужно учитывать.
Схема сборки намоточного станка
Намоточный станок, который проводит рядовую укладку проволоки, состоит из следующих элементов:
- В основе конструкции лежит сварная рама, которая имеет посадочные места и отверстия для фиксации других основных элементов.
- Подобный станок обладает механизмом, за счет которого длинномерный материал распределяется по всей длине барабана равномерно. Распределение проводится за счет каретки с направляющими роликами, которая и переводится вдоль барабана.
- Модели намоточных станков могут отличаться друг от друга размерами и функциональными возможностями.
Встречаются и стандартные механизмы, предназначенные для укладки проволоки. Среди их особенностей можно отметить следующие моменты:
- Основная часть конструкции представлена каркасом, который изготавливается из металла и дерева. Она расположена вертикально.
- Опоры служат для расположения двух горизонтальных осей: одна используется для установки пластин, вторая катушки.
- Механизм имеет и сменные шестерни, которые предназначены для передачи вращения.
- Ось соединена с рукояткой. Для ее фиксации используется цанговый зажим.
- В качестве фиксатора используются винты и гайки.
Если наматывать нужно на тороидальные сердечники, то используется механизм кольцевого типа. Он имеет следующие особенности:
- Конструкция напоминает челнок, который работает по принципу швейной иглы.
- Намоточное устройство подобного типа имеет шпулю. Она представлена сочетанием двух пересекающихся колец со съемным сектором.
- Для того чтобы шпуля вращалась устанавливают электрический двигатель.
При учете особенностей подобных механизмов можно создать самодельный намоточный станок. Он не будет существенно уступать покупным, при этом обойдется недорого.
Необходимые материалы и комплектация для изготовления
Основным элементом практически любой конструкции можно назвать каркас. Он изготавливается при скреплении всех элементов сваркой. Особенности конструкции следующие:
- Самодельный намоточный станок не должен выдерживать большую нагрузку. Поэтому в отдельных элемента просверливаются отверстия, после чего привариваются к основанию.
- В ранее созданных отверстиях монтируют втулки, в нижних располагают подшипники.
- С внешней стороны конструкции крепежные элементы прикрываются крышками.
- Верхний вал должен иметь диаметр 12 мм. Он предназначен для фиксации катушки.
- Средний предназначен для распределения нити по барабану. Перед тем как использовать механизм этот элемент полируется.
- Нижний вал предназначается для подачи длинномерного материала. Его размер может варьировать в большом диапазоне.
Намоточное устройство может изготавливаться самостоятельно. Рекомендуется использовать трехступенчатые шкивы, которые вытачиваются из закаленной стали.
Устройство укладчика проволоки
Процесс распределения длинномерного материала осуществляется за счет трех пластин, которые соединяются между собой. В верхней части создаваемой конструкции просверливается отверстие 6 мм. Он служит для установки винта:
- В пластины монтируются втулки, диаметр и длина которых 20 мм.
- Наружные элементы соединяются при вклеивании желоба из кожи. Они требуются для выравнивания и натягивания катушки.
- Сверху крепится стержень из стали, на котором есть витки резьбы. Он предназначен для скрепления пластин.
- Упростить процесс можно при установке откидного кронштейна.
Устройство укладчика проволоки
Самодельный намоточный станок характеризуется высокой эффективностью. Намоточное устройство изготовить достаточно просто даже при использовании простых материалов и инструментов.
Изготовление счетчика витков
В некоторых случаях нужно знать количество уложенных витков. Для этого устанавливается специальное устройство, которое также можно изготовить самостоятельно. Среди особенностей отметим следующие моменты:
- На верхний бал крепится обычный электрический магнит.
- К одной из сторон подводится изолированный провод.
- Отводимые контакты подсоединяются к специальному калькулятору.
- Катушка с проводом размещается отдельно.
За счет подобно расположения основных элементов счетчик получается компактным и весьма эффективным в применении. Станок для намотки с самодельным устройством подсчета витков дает небольшую погрешность, что стоит учитывать.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
В работе радиолюбителей и электриков полезны устройства для наматывания медного провода диаметром 1,5 мм на специальную электрическую катушку. В промышленных условиях данный процесс требует скорости и точности. Домашние мастера могут воспроизвести такую технологию. Для этого понадобится самодельный намоточный станок. Для него характерны такие признаки:
- простота создания и эксплуатации,
- возможность использования разных трансформаторов,
- наличие дополнительных функций: подсчет количества проволочных мотков.
Метод работы намоточного станка
Станок для намотки – востребованное оборудование, с помощью которого наматывают трансформаторные однослойные и многослойные катушки цилиндрического типа и всевозможные дроссели. Намоточное устройство равномерно распределяет проволоку обмотки с определенным уровнем натяжения. Оно бывает ручным и автоматическим, и работает по такому принципу:
- Вращение рукоятки задает намотку проводки или кабеля на каркас катушки. Она служит основанием изделия и надевается на специальный вал.
- Проволока перемещается горизонтально благодаря направляющему элементу укладчика.
- Количество витков определяют специальные счетчики. В самодельных конструкциях эту роль может выполнять велосипедный спидометр или магнитно-герконовый датчик.
Ручной прибор для укладки провода довольно примитивный, поэтому редко применяются на производстве.
Намоточный станок на механическом приводе позволяет выполнять сложную обмотку:
Он функционирует с помощью электрического двигателя, который задает движение промежуточного вала с использованием ременной передачи и трехступенчатых шкивов. Большую роль при этом играет фрикционная муфта сцепления. Благодаря ей станок работает плавно, без толчков и обрывов проволоки. Шпиндель с закрепленной оправой, на которую надета катушка, производит запуск счетчика. Намоточный станок настраивается с помощью винта под любую ширину катушечного каркаса.
Современные модели оснащены цифровым оборудованием. Они работают посредством специально заданной программы, которая хранит информацию в запоминающем устройстве. Значение длины и диаметра провода позволяет точно определить точку пересечения линий.
Механизм намоточного станка
Станок для намотки классифицируют по группам:
- рядовой,
- универсальной,
- тороидальной намотки.
Каждое изделие имеет индивидуальную конструкцию.
Намоточный станок, выполняющий рядовую укладку проволоки, состоит из таких элементов:
- Механизм намотки имеет вид сварной рамы, которая оборудована двигателем, зубчато-ременной передачей, передней и задней бабкой.
- Механизм раскладки позволяет перемещать длинномерный материал вдоль оси намотки. Это сварная конструкция, по которой двигается каретка с направляющими роликами для провода.
- Модели устройств отличаются друг от друга габаритами и функциональными возможностями.
Стандартная модель прибора для укладки провода несколькими перегибами за один оборот предполагает наличие таких элементов:
- Основной каркас, состоящий из деревянных или металлических стоек, которые занимают вертикальное положение.
- Между опорами расположены две горизонтальные оси: одна предназначена для пластин, другая – для катушки.
- Сменные шестерни, посылающие на катушку вращение.
- Рукоятка, которая вращает катушечную ось. Для ее фиксации используют цанговый зажим.
- Фиксаторы: гайки, винты.
Намотка проволоки на тороидальные сердечники осуществляется посредством специализированного оборудования кольцевого типа:
- Приспособление имеет вид челнока, работающего по принципу швейной иглы.
- Шпуля представляет собой механизм двух пересекающихся колец с вынимающимся сектором, на который устанавливают тороидальный каркас.
- Вращение шпули задает электродвигатель.
Необходимые материалы и комплектация для изготовления
Чтобы собственноручно сделать станок для намотки проволоки на круглый каркас, понадобится несколько деталей.
Станина из листового материала, скрепленного сварочным методом. Оптимальная толщина основания – 15 мм, боковых частей – 6 мм. Устойчивость конструкции обеспечивается ее тяжестью:
- Боковые части прикладывают друг к другу, одновременно просверливают в них отверстия.
- Подготовленные элементы приваривают к основанию.
- В высоко расположенные пробоины монтируют втулки, в нижние – подшипники, которые можно взять из использованного дисковода.
- Крепежные детали с внешней стороны боковин надежно фиксируют крышками.
Важные составляющие конструкции станка – валы:
- Верхний вал диаметром 12 мм держит каркас катушки. Его роль может исполнять аналогичная конструктивная деталь вышедшего из строя матричного принтера.
- На средний вал такого же диаметра опирается устройство подачи длинномерного материала. Перед вводом в эксплуатацию его желательно отполировать.
- Нижний вал является подающим элементом. Его размеры зависят от шага резьбы.
Втулка укладчика диаметром и длиной по 20 мм. Ее внутренняя резьба совпадает с резьбой нижнего вала.
Шкивы – трехступенчатые, выточенные из стали, общей толщиной не более 20 мм. В противном случае придется увеличить хвостовики верхнего и нижнего валов. Каждый блок содержит три канавки с разным диаметром, в зависимости от сечения проволоки. Их ширина определяется пассиками. Такая комбинация обеспечивает большое разнообразие шагов намотки провода.
Устройство укладчика проволоки
Укладка и намотка проволоки осуществляются за счет трех пластин, скрепленных между собой винтами диаметром 20 мм. В верхней части делают небольшое отверстие 6 мм, куда вставляют винт регулировки натяжения:
- В верхнюю и нижнюю часть внутренней пластины монтируют фторопластовую и стальную втулки диаметром и длиной по 20 мм.
- Между наружными элементами вклеивают кожаный желобок толщиной до 2-х мм, необходимый для выравнивания и натягивания проволоки катушки.
- Вверху укладчика монтируют специальный стержень с резьбой или мини-струбцину, которая скрепляет внешние пластины и регулирует натяжение. Расстояние крепления зависит от диаметра провода.
- Для удобства работы конструкцию дополнительно оснащают откидным кронштейном для катушки.
Изготовление счетчика витков
Для определения количества намотанных витков на станке необходим специальный счётчик. В самодельном станке устройство делают так:
- К верхнему валу крепят электромагнит.
- Герметизированный контакт располагают на одной из боковин.
- Выведенные контакты геркона соединяют с калькулятором в том месте, где находится кнопка «=».
- Катушку с проводом размещают отдельно – на другом валу с рычагами, которые поднимают устройство вверх и складывают его внутрь станка.
Благодаря этим элементам, оборудование становится компактным и не занимает много места.
Принцип работы на станке
Трудиться на сконструированном станке несложно. Технологический процесс требует выполнения определенных действий:
- Верхний вал подготавливают к работе: снимают шкив, задают нужную длину каркаса катушки, устанавливают правый и левый диски.
- В отверстие верхнего вала вставляют крепежное изделие, центрируют и зажимают каркас специальной гайкой.
- На подающий вал монтируют нужный шкив для первичной обмотки.
- Напротив каркаса катушки устанавливается укладчик.
- Пассик одевают на шкивы кольцом или восьмеркой, в зависимости от вида укладки.
- Металлический провод заводят под дополнительный вал, укладывают в желобок, закрепляют.
- Натяжение проволоки регулируют при помощи зажимов, расположенных вверху укладчика.
- Провод должен плотно наматываться на основу катушки.
- На калькуляторе фиксируют числовое значение «1+1».
- Каждый оборот вала прибавляет заданный счет.
- Если витки нужно отмотать назад, на вычислительном устройстве нажимают «–1».
- Когда провод достигнет противоположной части каркаса, с помощью цангового зажима меняют положение пассика.
Под разную толщину металлического провода соотносят шкив с шагом намотки.
Намоточный станок с укладчиком на шаговом двигателе. 13 апр 2016 14:03 #1
|
Реверсивный счетчик витков на авр. Электронный счетчик витков для намоточного станка
Во многих устройствах бытовой техники и промышленной автоматики сравнительно недавних лет выпусков установлены механические счетчики. Они продукцию на конвейере, витки провода в намоточных станках и т. п. В случае выхода из строя найти аналогичный счетчик оказывается непросто, в отремонтировать невозможно ввиду отсутствия запасных частей. Автор предлагает заменить механический счетчик электронным. Электронный счетчик, разрабатываемый на замену механическому, получается слишком сложным, если строить его на микросхемах малой и средней степени интеграции (например, серий К176, К561). особенно если необходим реверсивный счет. А чтобы сохранить результат при выключенном питании, необходимо предусмотреть резервную батарею питания.Но можно построить счетчик всего на одной микросхеме — универсальном программируемом микроконтроллере, имеющем в своем составе разнообразные периферийные устройства и способном решать очень широкий круг задач. Многие микроконтроллеры имеют особую область памяти — EEPROM. Записанные в нее (в том числе во время исполнения программы) данные, например, текущий результат счета, сохраняются и после отключения питания.
В предлагаемом счетчике применен микроконтроллер Attiny2313 из семейства AVR фирмы Almel. В приборе реализован реверсивный счет, вывод результата с гашением незначащих н
улей на четырехразрядный светодиодный индикатор, хранение результата в EEPROM при выключенном питании. Встроенный в микроконтроллер аналоговый компаратор использован для своевременного обнаружения уменьшения напряжения питания. Счетчик запоминает результат счета при отключении питания, восстанавливая его при включении, и аналогично механическому счетчику снабжен кнопкой обнуления показаний.
Схема счетчика представлена на рисунке. Шесть линий порта В (РВ2— РВ7) и пять линий порта D (PDO, PD1, PD4—PD6) использованы для организации динамической индикации результата счета на светодиодный индикатор HL1. Коллекторными нагрузками фототранзисторов VT1 и VT2 служат встроенные в микроконтроллер и включенные программно резисторы, соединяющие соответствующие выводы микроконтроллера с цепью его питания.
Увеличение результата счета N на единицу происходит в момент прерывания оптической связи между излучающим диодом VD1 и фототранзистором VT1, что создает нарастающий перепад уровня на входе INT0 микроконтроллера. При этом уровень на входе INT1 должен быть низким, т. е. фототранзистор VT2 должен быть освещен излучающим диодом VD2. В момент нарастающего перепада на входе INT1 при низком уровне на входе INT0 результат уменьшится на единицу. Другие комбинации уровней и их перепадов на входах INT0 и INT1 результат счета не изменяют.
По достижении максимального значения 9999 счет продолжается с нуля. Вычитание единицы из нулевого значения дает результат 9999. Если обратный счет не нужен, можно исключить из счетчика излучающий диод VD2 и фототранзистор VT2 и соединить вход INT1 микроконтроллера с общим проводом. Счет будет идти только на увеличение.
Как уже сказано, детектором снижения напряжения питания служит встроенный в микроконтроллер аналоговый компаратор. Он сравнивает нестабилизированное напряжение на выходе выпрямителя (диодного моста VD3) со стабилизированным на выходе интегрального стабилизатора DA1. Программа циклически проверяет состояние компаратора. После отключения счетчика от сети напряжение на конденсаторе фильтра выпрямителя С1 спадает, а стабилизированное еще некоторое время остается неизменным. Резисторы R2—R4 подобраны так. что состояние компаратора в этой ситуации изменяется на противоположное. Обнаружив это, программа успевает записать текущий результат счета в EEPROM микроконтроллера еще до прекращения его функционирования по причине выключения питания. При последующем включении программа прочитает число, записанное в ЕЕРРОМ, и выведет его на индикатор. Счет будет продолжен с этого значения.
Ввиду ограниченного числа выводов микроконтроллера для подключения кнопки SB1, обнуляющей счетчик, использован вывод 13, служащий инвертирующим аналоговым входом компаратора (AIM) и одновременно — «цифровым» входом РВ1. Делителем напряжения {резисторы R4, R5) здесь задан уровень, воспринимаемый микроконтроллером как высокий логический При нажатии на кнопку SB1 он станет низким. На состояние компаратора это не повлияет, так как напряжение на входе AIN0 по-прежнему больше, чем на AIN1.
При нажатой кнопке SB1 программа выводит во всех разрядах индикатора знак «минус», а после ее отпускания начинает счет с нуля. Если при нажатой кнопке выключить питание счетчика, текущий результат не будет записан в EEPROM, а хранящееся там значение останется прежним.
Программа построена таким образом, что ее легко адаптировать к счетчику с другими индикаторами (например, с общими катодами), с другой разводкой печатной платы и т. п. Небольшая коррекция программы потребуется и при использовании кварцевого резонатора на частоту, отличающуюся более чем на 1 МГц от указанной.
При напряжении источника 15 В измеряют напряжение на контактах 12 и 13 панели микроконтроллера относительно общего провода (конт.10). Первое должно находиться в интервале 4…4.5 В, а второе — быть больше 3,5 В, но меньше первого. Далее постепенно уменьшают напряжение источника. Когда оно упадет до 9… 10 В, разность значений напряжения на контактах 12 и 13 должна стать нулевой, а затем поменять знак.
Теперь можно установить в панель запрограммированный микроконтроллер, подключить трансформатор и подать на него сетевое напряжение. Спустя 1,5…2 с нужно нажать на кнопку SB1. На индикатор счетчика будет выведена цифра 0. Если на индикатор ничего не выведено, еще раз проверьте значения напряжения на входах AIN0.AIN1 микроконтроллера. Первое должно быть больше второго.
Когда счетчик успешно запущен, остается проверить правильность счета, поочередно затеняя фототранзисторы непрозрачной для ИК лучей пластиной. Для большей контрастности индикаторы желательно закрыть светофильтром из красного органического стекла.
Еще если кто будет собирать счётчик на Atiny2313 без кварца,
Фьюзы я запрограммировал так
Ознакомившись с рядом опубликованных в журнале конструкций счётчиков различного назначения (например, ), я принял решение разработать свой вариант счётчика витков, в котором использована энергонезависимая память микроконтроллера. В результате удалось создать простой и удобный в работе счётчик витков для намоточного станка, не содержащий дефицитных деталей.
Он способен считать от 0 до 9999 оборотов вала, после чего показания индикатора обнуляются и счёт начинается заново. При вращении вала в обратную сторону индикатор уменьшает показания на единицу на каждый оборот.
Рис. 1
Счётчик состоит из нескольких узлов (рис. 1). Основой конструкции служит микроконтроллер DD1, к которому через токоограничительные резисторы R10—R16 подключён четырёхразрядный светодиодный индикатор HG1. Две оптопары — излучающий ИК диод— фототранзистор (VD2VT1, VD3VT2), — образующие датчик числа оборотов рабочего вала станка, формируют импульсы низкого уровня, по которым микроконтроллер определяет направление вращения и число оборотов вала. Предусмотрена кнопка SB1 для обнуления памяти, а также вспомогательные цепи: R2C2, работающая в составе встроенного тактирующего генератора микроконтроллера, VD1C1, сохраняющая напряжение питания, необходимое для перехода микроконтроллера в режим SLEEP, и R6R8, следящая за напряжением питания счётчика.
Известно, что микроконтроллеры семейства PIC довольно капризны при работе с EEPROM (особенно, когда запись в неё происходит автоматически). Уменьшение напряжения питания может исказить содержимое памяти При работе счётчика линия RB1 (вывод 7) микроконтроллера, к которой подключена цепь R6R8, опрашивается на наличие напряжения питания, и если оно пропадает, то благодаря цепи VD1C1 микроконтроллер успевает перейти в спящий режим, тем самым блокируя дальнейшее выполнение программы и защищая информацию в EEPROM. В процессе счёта микроконтроллер будет сохранять в памяти числа после каждого оборота рабочего вала станка. При каждом очередном включении питания индикатор HG1 отобразит то число, что было до отключения.
Датчик представляет собой небольшую печатную плату (22×22 мм), на которой смонтированы два излучающих диода и два фототранзистора, установленных так, что образуют два оптических канала передатчик—приемник. Оптические оси каналов параллельны, межосевое расстояние — около 10 мм.
На рабочем валу станка неподвижно закреплена шторка в виде диска из жёсткого непрозрачного для ИК лучей материала (текстолит, гетинакс, металл, пластик) толщиной 1…2 мм. Диаметр шторки — 35…50 мм, диаметр центрального установочного отверстия равен диаметру вала. Плату на станке фиксируют так, чтобы шторка, вращаясь вместе с валом, могла перекрывать собой оба ИК луча.
В шторке пропиливают вырез в форме неполного сектора. Угловая ширина и глубина выреза должны быть такими, чтобы при вращении вала шторка обеспечивала кратковременное прохождение ИК излучения сначала только через один канал, затем через оба и, наконец, только через другой, как это схематически проиллюстрировано на рис. 2. Цветом показаны каналы, открытые в той или иной позиции. Такой порядок следования сигналов с датчика даёт микроконтроллеру возможность определять направление вращения рабочего вала станка
.
Счётчик рассчитан на питание от батареи из трёх гальванических элементов АА (R6), но можно использовать любой сетевой блок со стабилизированным выходным напряжением 5 В.
Датчик смонтирован на печатной плате из фольгированного стеклотекстолита толщиной 1 мм. Чертёж платы показан на рис. 3. Токоограничива-ющий резистор R3 припаян со стороны печатных проводников а излучающие диоды и фототранзисторы — с другой.
Остальные детали (кроме батареи GB1 и выключателя SA1) размещены на второй плате, изготовленной из такого же стеклотекстолита. Её чертёж представлен нарис. 4. Все резисторы (кроме R3) на ней размещены со стороны печати поверхностным монтажом, а микроконтроллер, цифровой индикатор, конденсаторы, диод, кнопка SB1 и проволочные перемычки — с противоположной стороны. Микроконтроллер установлен в панель, впаянную в плату.
Плата датчика скреплена с основной двумя скобами, согнутыми из медной лужёной проволоки диаметром 1,2 мм и припаянными к краевым печатным проводникам плат. Для крепления плат к корпусу станка использованы самодельные держатели с ушком для винта, изготовленные из такой же проволоки и также припаянные к основной плате.
Рис. 4
Общий вид одного из конструктивных вариантов счётчика, установленного на намоточном станке, показан на фото рис. 5. Батарея гальванических элементов с выключателем прикреплены к станку сзади.
Для датчика, кроме указанных на схеме, можно использовать излучающие диоды SEP8706-003, SEP8506-003, KM-4457F3C, АЛ144А, АЛ108АМ и другие, а фототранзисторы — SDP8436-003, КТФ102А. Очень хорошо подходят также оптопары от старых шариковых компьютерных манипуляторов — мышей; у излучающих диодов короткий вывод—катод, а у фототранзисторов — эмиттер.
Следует заметить, что лучше использовать фототранзисторы в непрозрачном (чёрном) корпусе — в этом случае вероятность сбоев и ошибок в счёте из-за попадания на фотоприемники световых помех от внешних ярких источников будет минимальна. Если же фототранзисторы, имеющиеся в наличии, прозрачные, на каждый из них следует на деть отрезок чёрной ПВХ трубки с отверстием напротив линзы, а весь датчик закрыть от постороннего света накладкой из чёрной бумаги. Если шторка изготовлена из отражающего свет материала, её рекомендуется покрыть чёрной матовой краской.
Вместо «поверхностных» резисторов можно использовать МЛТ-0,125 или С2-23 мощностью 0,062 Вт. Кнопка SB1 — любая, подходящая по месту крепления на плате. Вместо E40281-L-O-0-W подойдёт цифровой индикатор FYQ-2841CLR.
Программа микроконтроллера разработана и отлажена в среде Proteus, после чего с помощью программатора ICProg загружена в микроконтроллер. После установки микроконтроллера в панель при первом и последующих включениях счётчика индикатор отобразит знак «минус» во всех знакоместах. Примерно через две секунды на табло появятся нули — это признак готовности счётчика к работе.
В программе предусмотрена функция аварийного обнуления памяти на тот случай, когда в неё попадёт ошибочная информация и микроконтроллер «зависает» (такое бывает крайне редко, но быть может). Для возвращения микроконтроллера в рабочий режим нужно выключить питание счётчика, нажать на кнопку «Обнуление» и, не отпуская её, включить питание. Как только табло отобразит нули, можно продолжать работать, но информация о прежнем числе витков будет, разумеется, утрачена.
В налаживании правильно собранное устройство не нуждается.
Но можно построить счетчик всего на одной микросхеме — универсальном программируемом микроконтроллере, имеющем в своем составе разнообразные периферийные устройства и способном решать очень широкий круг задач. Многие микроконтроллеры имеют особую область памяти — EEPROM. Записанные в нее (в том числе во время исполнения программы) данные, например, текущий результат счета, сохраняются и после отключения питания.
В предлагаемом счетчике применен микроконтроллер Attiny2313 из семейства AVR фирмы Almel. В приборе реализован реверсивный счет, вывод результата с гашением незначащих н
улей на четырехразрядный светодиодный индикатор, хранение результата в EEPROM при выключенном питании. Встроенный в микроконтроллер аналоговый компаратор использован для своевременного обнаружения уменьшения напряжения питания. Счетчик запоминает результат счета при отключении питания, восстанавливая его при включении, и аналогично механическому счетчику снабжен кнопкой обнуления показаний.
Схема счетчика представлена на рисунке. Шесть линий порта В (РВ2- РВ7) и пять линий порта D (PDO, PD1, PD4-PD6) использованы для организации динамической индикации результата счета на светодиодный индикатор HL1. Коллекторными нагрузками фототранзисторов VT1 и VT2 служат встроенные в микроконтроллер и включенные программно резисторы, соединяющие соответствующие выводы микроконтроллера с цепью его питания.
Увеличение результата счета N на единицу происходит в момент прерывания оптической связи между излучающим диодом VD1 и фототранзистором VT1, что создает нарастающий перепад уровня на входе INT0 микроконтроллера. При этом уровень на входе INT1 должен быть низким, т. е. фототранзистор VT2 должен быть освещен излучающим диодом VD2. В момент нарастающего перепада на входе INT1 при низком уровне на входе INT0 результат уменьшится на единицу. Другие комбинации уровней и их перепадов на входах INT0 и INT1 результат счета не изменяют.
По достижении максимального значения 9999 счет продолжается с нуля. Вычитание единицы из нулевого значения дает результат 9999. Если обратный счет не нужен, можно исключить из счетчика излучающий диод VD2 и фототранзистор VT2 и соединить вход INT1 микроконтроллера с общим проводом. Счет будет идти только на увеличение.
Как уже сказано, детектором снижения напряжения питания служит встроенный в микроконтроллер аналоговый компаратор. Он сравнивает нестабилизированное напряжение на выходе выпрямителя (диодного моста VD3) со стабилизированным на выходе интегрального стабилизатора DA1. Программа циклически проверяет состояние компаратора. После отключения счетчика от сети напряжение на конденсаторе фильтра выпрямителя С1 спадает, а стабилизированное еще некоторое время остается неизменным. Резисторы R2-R4 подобраны так. что состояние компаратора в этой ситуации изменяется на противоположное. Обнаружив это, программа успевает записать текущий результат счета в EEPROM микроконтроллера еще до прекращения его функционирования по причине выключения питания. При последующем включении программа прочитает число, записанное в ЕЕРРОМ, и выведет его на индикатор. Счет будет продолжен с этого значения.
Ввиду ограниченного числа выводов микроконтроллера для подключения кнопки SB1, обнуляющей счетчик, использован вывод 13, служащий инвертирующим аналоговым входом компаратора (AIM) и одновременно — «цифровым» входом РВ1. Делителем напряжения {резисторы R4, R5) здесь задан уровень, воспринимаемый микроконтроллером как высокий логический При нажатии на кнопку SB1 он станет низким. На состояние компаратора это не повлияет, так как напряжение на входе AIN0 по-прежнему больше, чем на AIN1.
При нажатой кнопке SB1 программа выводит во всех разрядах индикатора знак «минус», а после ее отпускания начинает счет с нуля. Если при нажатой кнопке выключить питание счетчика, текущий результат не будет записан в EEPROM, а хранящееся там значение останется прежним.
Программа построена таким образом, что ее легко адаптировать к счетчику с другими индикаторами (например, с общими катодами), с другой разводкой печатной платы и т. п. Небольшая коррекция программы потребуется и при использовании кварцевого резонатора на частоту, отличающуюся более чем на 1 МГц от указанной.
При напряжении источника 15 В измеряют напряжение на контактах 12 и 13 панели микроконтроллера относительно общего провода (конт.10). Первое должно находиться в интервале 4…4.5 В, а второе — быть больше 3,5 В, но меньше первого. Далее постепенно уменьшают напряжение источника. Когда оно упадет до 9… 10 В, разность значений напряжения на контактах 12 и 13 должна стать нулевой, а затем поменять знак.
Теперь можно установить в панель запрограммированный микроконтроллер, подключить трансформатор и подать на него сетевое напряжение. Спустя 1,5…2 с нужно нажать на кнопку SB1. На индикатор счетчика будет выведена цифра 0. Если на индикатор ничего не выведено, еще раз проверьте значения напряжения на входах AIN0.AIN1 микроконтроллера. Первое должно быть больше второго.
Когда счетчик успешно запущен, остается проверить правильность счета, поочередно затеняя фототранзисторы непрозрачной для ИК лучей пластиной. Для большей контрастности индикаторы желательно закрыть светофильтром из красного органического стекла.
Еще если кто будет собирать счётчик на Atiny2313 без кварца,
Фьюзы я запрограммировал так
исходник ASM
Прошивка
Вариант 1: ATmega8 + Nokia 5110 LCD + питание 3V
В схеме используются Atmega8-8PU (внешний кварц частотой 8MHz), Nokia 5110 LCD и транзистор для обработки импульсов от геркона. Регулятор напряжения на 3,3V обеспечивает питание для всей цепи.
Все компоненты были смонтированы на макетной плате, включая разъемы для: ISP — программатора (USBAsp), 5110 Nokia LCD, питания (5V, подаваемого на 3.3V — регулятор), геркона, кнопки сброса и 2-контактный разъем, используемый для считывания полярности обмотки двигателя привода станка, чтобы знать, увеличивать или уменьшать счетчик.
Назначение разъемов:
J1: Питание. На разъем поступает 5V и дальше на стабилизатор L7833 для получения напряжения 3,3V, используемого ATmega8 и LCD.
J2: Разъем для ЖК-дисплея, идущий на Nokia 5110 LCD.
J3: Геркон. Вход импульсов для подсчета микроконтроллером.
J4: Разъем полярности. Он должен быть подключен параллельно обмотке двигателя. Схема слежения была расчитана для 12-вольтового двигателя, но ее можно применить под другое напряжение двигателя, регулируя номиналы делителей напряжения, образованные R3-R4 и R5-R6. Если двигатель подключен к прямой полярности, на PD0 будет высокий лог. уровень, если двигатель подключен к обратной полярности, то на PD1 будет высокий лог. уровень. Эта информация используется в коде для увеличения или уменьшения счетчика.
J5: Сброс счетчика. При нажатии кнопки, произойдет обнуление счетчика.
Разъем ISP: это 10-контактный разъем для программатора USBAsp AVR.
Схема устройства
Фото готового устройства
Вариант 2: ATmega8 + 2×16 HD44780 LCD + питание 5V
Некоторые из моих читателей попросили сделать вариант счетчика в котором используется дисплей 2×16 HD44780 (или меньший вариант 1×16). Для этих дисплеев требуется напряжение питания 5V, поэтому стабилизатор на 3,3V не актуален.
Схема устройства
Биты конфигурации микроконтроллера для обоих вариантов: LOW — 0xFF, HIGH — 0xC9.
| Архив для статьи «Счетчик витков для намоточного станка» | |
| Описание:
Исходный код(Си), файлы прошивок для микроконтроллера |
|
| Размер файла: 111.35 KB Количество загрузок: 257 |
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает — от тут и началось! Поиск по интернетам дал некоторые возможные варианты станко-построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, а также герконы с калькуляторами. Хм …. На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов. Serega с РадиоКота : «Хорошие электронщики, зачастую — плохие механики !». Может я и не лучший электронщик — но механик уж точно паршивый.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой — это ж не много — не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 — наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 — эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
О кнопках сразу не сказал — а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 — включает режим намотки (режим установлен по умолчанию) — с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 — режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» — в минус сматываться не будет:)
S4 — чтение сохраненной в EEPROM информации.
S5 — запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла — 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
С датчика холла TLE4905L (можно попробовать и другой воткнуть, я выбирал по принципу «что подешевле и есть в наличии») сигнал поступает на контроллер, генерируется прерывание и изменяется текущее значение, в зависимости от выбранного режима. Контроллер отсылает информацию на сдвиговые регистры, с которых она, в свою очередь, отправляется на семисегментные индикаторы либо на клавиатуру. Семисегментники применял с общим катодом, у меня был сразу квартет в одном корпусе, но желающим никто не мешает прикрутить 2 сдвоенных или 4 одиночных соединив параллельно аноды. Точка на индикаторах не используется, соответственно вывод H (dp) висит в воздухе. Работают индикаторы в динамическом режиме, поэтому сопротивления в R3-R9 номиналом меньше расчётных. На транзисторах VT1-VT4 собраны драйверы для индикаторов. Можно было применить и специализированные микросхемы типа ULN2803, но решил на транзисторах, по той простой причине, что у меня их скопилось — «как грязи», некоторым из них лет больше чем мне.
Кнопки S2-S4 — а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера. Пересылка инфы на индикацию и на сканирование клавы происходит на большой частоте (внутренний генератор в тини13 настроен на 9,6МГц), соответственно как быстро мы не пытались бы нажать и отпустить кнопку, за время нажатия произойдет много срабатываний и соответственно нолик с кнопки побежит на встречу единичке с контроллера. Ну и такая неприятная вещь как дребезг контактов кнопок опять же.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать — береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
IC1 — микроконтроллер ATtiny13, можно применить с литерой V. Распиновка для варианта в SOIC-е такая же как на схеме. Если у кого то возникнет желание применить в корпусе QFN/MLF — тому даташит в руки.
IC2-IC3 — 8-ми разрядные сдвиговые регистры с защелкой на выходе — 74HC595, на макете я использовал в корпусах DIP на плате в готовом устройстве в SOIC-е. Распиновка одинаковая.
IC4 — цифровой однополярный датчик холла TLE4905L. Обвязка по даташиту R2 — 1k2, C2-C3 по 4n7. При установке датчика на станок проверить на какую сторону магнита он реагирует.
C1, C4 и C5 — конденсаторы фильтрующие питание, я ставил по 100n, должны быть установлены, как можно ближе к питающим выводам микросхем.
R1 — резистором подтягиваем ногу ресет к питанию, 300Ом — и далее. Я ставил 1k.
R3-R9 — токоограничительные резисторы для индикаторов. 33 Ом — 100 Ом, чем больше сопротивление, тем соответственно тусклее будут светить.
R10-R13 — ограничивают ток в цепях баз транзисторов. На макете стояли по 510 Ом, в плату вкрутил по 430 Ом.
VT1-VT4 — КТ315 с любыми буквенными индексами, можно заменить на КТ3102, КТ503 и аналоги.
R14-R15 как писалось выше для предотвращения «драки», думаю можно поставить от 1k и выше, но не задирать выше 4k7. При R16-R17 равных 300 Ом, суммарное сопротивление последовательно соединенных резисторов, не должно превышать 5k, в ходе моих экспериментов с повышением сопротивления выше 5k появлялись ложные срабатывания кнопок.
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство».
Плату разводил в SL, причем развел скорее всего не оптимально — подгонял под имеющиеся детали, лень мне было на рынок ехать покупать другие. В общем развел, напечатал на прозрачной односторонней пленке Lomond для черно-белых лазерных принтеров. Печатал в негативе, в 2х экземплярах. Негатив — потому как собирался ПП делать с помощью пленочного фоторезиста, а он в свою очередь NEGATIVE. А в 2х экземплярах — чтоб при совмещении получился максимально непрозрачный слой тонера. Нет у меня желания ещё и балон с аэрозолем TRANSPARENT
21
покупать.
Совмещаем фотошаблоны, выставляя «на просвет», чтоб идеально совместились отверстия закрепляем обычным степлером — к этой процедуре нужно подойти ответственно, от неё во многом зависит качество будущей платы.
Теперь надо подготовить фольгированный текстолит. Кто-то трет его мелкой шкуркой, кто-то ластиком, а я, в последнее время, предпочитаю следующие варианты:
1. Если медь не шибко засрата окислами, достаточно её протереть тампоном смоченым в нашатырном спирте — ох и вонючая херня доложу я Вам, не нравится мне это занятие, но зато шустро. Идеально медь блистеть после этого не будет, но окислы спирт смоет и плата протравится.
2. Если же медь загажена порядочно, я её полирую войлочным кругом. Вешаю его на дрель и вуаля. Особо тут усердствовать не надо, пасту ГОИ я не применяю, для последующей протравки достаточно только войлочного круга. Быстро и эффективно.
В общем подготовили — фото выложить не могу, блистит зараза как зеркало и ничего не видно на фотке, фотограф из меня тож паршивый.
Ну да ладно, далее будем накатывать фоторезист.
Надо признать что фоторезист у меня уже вышел и срока годности и к плате собака липнуть отказывается, поэтому приходится предварительно плату греть. Я грею феном, но можно и утюгом. Хорошо бы конечно для этих целей ламинатор иметь, но:
— бабла мне на него теперь жалко
— когда бабла было не жалко было тупо лень:)
На горячую плату накатываем фоторезист, не забыв снять защитную пленку. Стараемся это делать максимально аккуратно, чтоб между платой и фоторезистом небыло воздушных пузырей. Бороться с ними потом — отдельная жопа. Если же пузыри все-таки появились, прокалываю их иглой.
Накатывать можно при любом освещении и не заниматься хернёй вспоминая любителей-фотографов, главное в нашем деле отсутствие солнечных лучей и других источников ультрафиолета.
После накатки, прогреваю плату горячим утюгом через газету, этим лечятся проколотые пузыри, ну и фоторезист прилипает намертво.
Далее накладываем шаблон на плату, здесь плата двухсторонняя, потому шаблон будет с обеих сторон платы. Кладём этот «бутерброд» на лист оргстекла и прижимаем воторым листом сверху. 2 листа нужны для того, чтоб после засветки одной стороны, можно было аккуратно перевернуть плату не сдвинув фотошаблон.
Засвечиваем с другой стороны. Я пользуюсь вот такой лампой:
Засвечиваю с растояния где-то 150мм в течении 7 минут (расстояние и время подбираются экспериментально).
Далее готовим слабый щелочной раствор — чайная ложка кальцинированной соды на пол литра воды. Температура воды — не принципиальна. Размешиваем чтоб растворилась вся сода. Для рук этот раствор не опасен, на ощупь как мыльная вода получается.
Снимаем с нашей платы защитную пленку и кидаем в раствор, после чего активно кисточкой начинаем тереть — но особо не нажимаем, чтоб не посдирать дорожки. Можно конечно и не тереть, но тогда есть вариант смываться фоторезист будет:
— долго
— смоется всё
а нам не то не другое не подходит, посему трем.
получаем что-то похожее:
Промываем плату водой, раствор не выливаем — он нам ещё пригодится. Если в процессе проявки платы какие-то дорожки всёж отслоились либо воздушные пузыри дорожки подпортили, необходимо эти места подретушировать цапонлаком либо специальным маркером. Далее травим плату. Я пользую хлорное железо.
После травления опять промываем плату водой и кидаем обратно в щелочной раствор, чтоб смыть более не нужный фоторезист. Часика хватает.
Далее лудим. Для маленьких плат или шибко ювелирных пользуюсь сплавом Розе, для таки вот плат — тупо паяльником с плоским жалом размазываю олово по плате. Плату в этом случае имеет мысл покрыть флюсом, я пользуюсь обычным спирто-канифольным.
Кому-то может показаться что дорожки вышли не шибко ровными — дорожки вышли ровными:) это издержки метода лужения паяльником, олово не равномерно ложится.
В законченом варианте кнопка сброса отсутствует — ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания — защита от переполюсовки. Что касается остальных деталек — то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся:)
Теперь точно всё, всем спасибо за внимание, а товарищам GP1 и Avreal за помощь в разработке.
Намоточный станок для трансформаторов, катушек
Устройства для наматывания медного провода часто используются в работе электриков и радиолюбителей. В качестве основы для провода используют специальную катушку. При проведении работы в промышленности процесс требует точности и скорости. В домашних мастерских намоточный станок также может применяться для проведения рассматриваемой работы.
Намоточный станокМетод работы намоточного станка
На сегодняшний день намоточный станок считается весьма востребованным оборудованием, при его применении проводится создание однослойных и многослойных катушек трансформаторного типа. За счет подобного механизма можно равномерно распределить проволоку на подготовленные барабаны. Выделяют ручные и автоматические варианты исполнения станков, оба работают по схожему признаку:
- Основное вращение может передаваться от установленного электрического привода или механической рукоятки. В случае рукоятки она крепится на вал, который также используется для крепления барабана.
- Укладка проволоки упрощается за счет специального направляющего элемента. Именно он также обеспечивает равномерность распределения мотков.
- Специальный счетчик может определять количество витков, которые укладываются на барабан. При изготовлении самодельных конструкций в качестве счетчика может использоваться велосипедный спидометр.
Устройство намоточного станка
Применение специального механизма позволяет проводить рядовую и тороидальную, перекрестную укладку проволоки. Электрический вариант исполнения характеризуется высокой эффективностью, вращение передается от электрического двигателя через ременную передачу и шкивы. Фрикционная муфта делает работу более плавной, что исключает вероятность обрыва.
Современные варианты исполнения оснащены цифровым оборудованием. Установленные блоки памяти могут не только считать количество витков, но и запоминать эту информацию.
Механизм намоточного станка
Рассматривая ручной намоточный станок нужно учитывать, что в продаже есть несколько различных вариантов конструкции: рядовой, тороидальный и универсальный. Все варианты исполнения характеризуются определенными особенностями, которые нужно учитывать.
Схема сборки намоточного станка
Намоточный станок, который проводит рядовую укладку проволоки, состоит из следующих элементов:
- В основе конструкции лежит сварная рама, которая имеет посадочные места и отверстия для фиксации других основных элементов.
- Подобный станок обладает механизмом, за счет которого длинномерный материал распределяется по всей длине барабана равномерно. Распределение проводится за счет каретки с направляющими роликами, которая и переводится вдоль барабана.
- Модели намоточных станков могут отличаться друг от друга размерами и функциональными возможностями.
Встречаются и стандартные механизмы, предназначенные для укладки проволоки. Среди их особенностей можно отметить следующие моменты:
- Основная часть конструкции представлена каркасом, который изготавливается из металла и дерева. Она расположена вертикально.
- Опоры служат для расположения двух горизонтальных осей: одна используется для установки пластин, вторая катушки.
- Механизм имеет и сменные шестерни, которые предназначены для передачи вращения.
- Ось соединена с рукояткой. Для ее фиксации используется цанговый зажим.
- В качестве фиксатора используются винты и гайки.
Если наматывать нужно на тороидальные сердечники, то используется механизм кольцевого типа. Он имеет следующие особенности:
- Конструкция напоминает челнок, который работает по принципу швейной иглы.
- Намоточное устройство подобного типа имеет шпулю. Она представлена сочетанием двух пересекающихся колец со съемным сектором.
- Для того чтобы шпуля вращалась устанавливают электрический двигатель.
При учете особенностей подобных механизмов можно создать самодельный намоточный станок. Он не будет существенно уступать покупным, при этом обойдется недорого.
Необходимые материалы и комплектация для изготовления
Основным элементом практически любой конструкции можно назвать каркас. Он изготавливается при скреплении всех элементов сваркой. Особенности конструкции следующие:
- Самодельный намоточный станок не должен выдерживать большую нагрузку. Поэтому в отдельных элемента просверливаются отверстия, после чего привариваются к основанию.
- В ранее созданных отверстиях монтируют втулки, в нижних располагают подшипники.
- С внешней стороны конструкции крепежные элементы прикрываются крышками.
- Верхний вал должен иметь диаметр 12 мм. Он предназначен для фиксации катушки.
- Средний предназначен для распределения нити по барабану. Перед тем как использовать механизм этот элемент полируется.
- Нижний вал предназначается для подачи длинномерного материала. Его размер может варьировать в большом диапазоне.
- Самодельный намоточный станок
- Изготовление намоточного станка
Намоточное устройство может изготавливаться самостоятельно. Рекомендуется использовать трехступенчатые шкивы, которые вытачиваются из закаленной стали.
Устройство укладчика проволоки
Процесс распределения длинномерного материала осуществляется за счет трех пластин, которые соединяются между собой. В верхней части создаваемой конструкции просверливается отверстие 6 мм. Он служит для установки винта:
- В пластины монтируются втулки, диаметр и длина которых 20 мм.
- Наружные элементы соединяются при вклеивании желоба из кожи. Они требуются для выравнивания и натягивания катушки.
- Сверху крепится стержень из стали, на котором есть витки резьбы. Он предназначен для скрепления пластин.
- Упростить процесс можно при установке откидного кронштейна.
Устройство укладчика проволоки
Самодельный намоточный станок характеризуется высокой эффективностью. Намоточное устройство изготовить достаточно просто даже при использовании простых материалов и инструментов.
Изготовление счетчика витков
В некоторых случаях нужно знать количество уложенных витков. Для этого устанавливается специальное устройство, которое также можно изготовить самостоятельно. Среди особенностей отметим следующие моменты:
- На верхний бал крепится обычный электрический магнит.
- К одной из сторон подводится изолированный провод.
- Отводимые контакты подсоединяются к специальному калькулятору.
- Катушка с проводом размещается отдельно.
- Счетчик витков для намоточного станка
- Схема счетчика витков
За счет подобно расположения основных элементов счетчик получается компактным и весьма эффективным в применении. Станок для намотки с самодельным устройством подсчета витков дает небольшую погрешность, что стоит учитывать.
Как сделать простой счетчик механических действий из обычного калькулятора.
Фишка в том, что если на калькуляторе нажать на кнопки «1», затем на «+», потом на «=», то с каждым последующим нажатием на «=» на экране будет имеющееся число увеличиваться на единицу. Следовательно, чтобы сделать из калькулятора счетчик нам нужно просто пару проводов припаять к токоведущим дорожкам, идущим к кнопке «=». После этого эти провода вывести наружу. К их концам припаять небольшой переключатель. Замыкание этого переключателя будет равносильно нажатию на кнопку «=», что находится на самом калькуляторе.
Видео по этой теме:
К примеру, возникла необходимость в намотке провода на сердечник трансформатора. Как известно количество витков в трансформаторе влияет на напряжение, которое в него входит и выходит. Достаточно большое количество витков провода содержит именно первичная обмотка (рассчитанная на напряжение 220 вольт). Причем она еще наматывается достаточно тонким проводом. Наматывать ее вручную — это проблематичное дело. Помимо уделения внимания на ровность намотки еще в голове нужно вести счет количеству уже намотанного провода на катушку. Тут то и пригодится простой, самодельный счетчик механических действий, который можно сделать из обычного калькулятора своими руками.
Далее мы собираем простенький намоточный станок, на котором будем мотать обмотки трансформатора. К станку крепим наш переключатель, что отходит от калькулятора. На оси намоточного станка, на которой будет вращаться каркас катушки с наматываемым проводом, крепим рычажок, что при каждом полном обороте оси будет нажимать и замыкать переключатель счетчика, сделанного из калькулятора. В итоге, при намотке катушки трансформатора нам остается только крутить ручку намоточного станка и следить за качеством наложения витков на каркас. Задачу по счету берет на себя наш калькулятор.
Другим примером использования этого простого счетчика механических действий, сделанного из калькулятора, может быть простой подсчет количества открываний и закрываний двери. То есть, мы конечный переключатель крепин на раму двери. При открывании или закрывании двери переключатель должен замыкаться. Перед началом подсчета мы сбрасываем калькулятор, нажимаем клавиши «1», «+», «=», после чего уже с каждым последующим замыканием переключателя (установленного на двери) показания счетчика будут увеличиваться на единицу.
По сути если задаться целью сделать более компактный и функциональный счетчик механических действий, то нужно выбрать калькулятор небольших размеров. Чтобы постоянно не нажимать последовательную комбинацию «1», «+», «=» можно сделать какую-нибудь электронную схему, что при включении калькулятора будет сама это делать в самом начале. Поместить все это в отдельный корпус, на котором будут только основные кнопки запуска счетчика и его обнуления для нового счета.
Как показывает практика вовсе не обязательно покупать себе дорогостоящие приспособления, устройства, если вы ими часто не пользуетесь. При острой необходимости всегда можно обойтись каким нибудь простеньким устройством, которое можно собрать своими руками. Наш счетчик механических действий, которой сделан из самого обычного калькулятора тому подтверждение. Но если вы занимаетесь чем-то уже профессионально, то рациональнее (правильнее с логической точки зрения) будет приобретение такого же профессионального оборудования для большей точности, удобства, функциональности.
Счетчик оборотов обмотки, промышленные, электромеханические предприятия
О компании
Год основания 2000
Юридический статус Фирмы Физическое лицо — Собственник
Характер бизнеса Производитель
Количество сотрудников До 10 человек
Годовой оборот R.5-10 крор
Участник IndiaMART с июля 2007 г.
GST09AFDPB5706L1ZH
Код импорта и экспорта (IEC) 05020 *****
Мы — известный поставщик, поставщик услуг, экспортер и консультант инновационных научных / промышленных продуктов, приборов, аппаратов и систем, системы мониторинга окружающей среды. В ассортимент нашей продукции входят различные датчики и преобразователи, система измерения и калибровки электрических испытаний, мониторинг окружающей среды, контроллер дисплея / регистратор / регистратор данных, машины для производства двигателей, инфракрасная тепловизионная камера, видеоборескоп, испытательное оборудование, электрические счетчики и оборудование, анализатор магнитного поля. .Эти продукты популярны среди наших клиентов за их низкие эксплуатационные расходы, длительный срок службы, точность и воспроизводимость результатов, а также простоту эксплуатации. Мы закупаем нашу продукцию только у сертифицированных и проверенных поставщиков по всему миру. Предлагаемая нами продукция включает в себя прецизионные датчики, измеритель потерь в сердечнике, комплект для измерения частичного разряда, тестер изоляции высокого напряжения, тестер электродвигателя, тестер ротора, тестер статора, тестер перенапряжения, измеритель микроомов, измеритель сопротивления мил-ом, измеритель сопротивления катушки горячей линии. , Шнуровочная машина, Горизонтальная формовочная машина, Катушка намотки, Тестер якоря, Импульсный тестер, Полифункциональный измеритель скачков напряжения, Измеритель LCR, Промышленные омметры, Счетчик оборотов обмотки, Дельта-метр C и Tan, Системы точной калибровки, Система мониторинга погоды, Метеостанция, Датчики погоды, датчики анализа окружающей среды, система мониторинга шума, измеритель уровня звука, программное обеспечение для прогнозирования и расчета шума (CadnaA, CadnaR, Bastian), инфракрасная тепловизионная камера, магнитооптические датчики, CMOS-Mag View и Mag View.
Мы также проводим консультации по термографии для профилактического обслуживания и обследования зданий и т. Д. Термографическая инспекция обеспечивает мониторинг состояния и диагностику электрических панелей, распределительных устройств, оборудования и т. Д. И помогает обнаруживать неисправные или ненормальные детали / части. Мы не только занимаемся термографией в качестве консультантов, мы представляем одного из ведущих мировых производителей тепловизионных камер — Nippon Avionics Co. ltd. — Группа компаний NEC. Как авторизованный дистрибьютор AVIO, мы можем предложить вам одни из лучших предложений или решений на рынке сегодня.Другие наши услуги включают обучение с нашими экспертными знаниями в этой области; мы обучаем вас и ваш персонал, чтобы повысить ваши навыки и знания при проведении теплового обследования или обследований.
Наша организация также выполнила различные услуги по ремонту, модернизации и калибровке поставляемых нами приборов. Мы успешно угождаем бизнес-требованиям наших клиентов с помощью нашего оптимального качественного ассортимента продукции. Наша огромная клиентская база довольных клиентов включает Suzlon, Enercon, Bosch, BHEL, Siemens, Tata и Suzuki Denso, ABB, Emerson, L&T ECC, L&T MHI, CPCB и институты IIT и NIT по всей Индии.
Специфика деятельности:
- Профиль компании: Поставщик, поставщик услуг и решений и консультант.
- Базируется в: Нойда, Уттар-Прадеш (Индия)
Видео компании
Как сделать схему счетчика обмоток трансформатора
В статье подробно рассказывается, как сделать простую схему счетчика обмоток трансформатора с использованием обычных светодиодов, а также с помощью усовершенствованной схемы цифрового дисплея.Идея была предложена одним из преданных читателей этого блога
Цели и требования схемы
- Мне нужна схема, которая подсчитывает количество витков для намотки трансформатора, срабатывающего с помощью геркона.
- На самом деле я сам сделал деревянную мотальную машину. теперь сложно запомнить количество витков. вот почему мне это нужно. он может показывать повороты с помощью 7-сегментных дисплеев или любым самым простым способом. любезно сделал это.
- Другое дело, что я собираюсь сделать регулятор напряжения ступенчатого типа на 5 кВ (с ручным управлением от 8 до 9 шагов) для домашнего использования
, какой диаметр провода я должен использовать и какое количество витков как первичного, так и вторичного. Если возможно, разработайте и эту схему.
Конструкция
Предлагаемая схема счетчика обмоток трансформатора может быть легко построена с использованием геркона, магнита, нескольких микросхем 4017 и светодиодов, как показано ниже:
Как видно на приведенной выше диаграмме, показания для подсчет обмоток просто достигается с помощью светодиодов на трех микросхемах IC 4017, что делает сборку очень простой и без каких-либо специальных цифровых микросхем или дисплеев.
Идея проста: герконовый переключатель активируется при каждом повороте обмоточного колеса, что соответствует одному числу оборотов обмотки трансформатора.
На это указывает смещение или последовательное переключение светодиода IC1 с контакта №3 на контакт №11, что составляет 10 отсчетов обмоток. Это означает, что светодиоды IC1 перескакивают с одного вывода на другой в ответ на каждое вращение колеса, которое соответствует одному витку обмотки.
Идентичная последовательность светодиодов IC2 в ответ на каждые 10 отсчетов обмоток, и поэтому каждое переключение светодиода с одного вывода на другой указывает на 10 отсчетов обмоток.
IC3 также сконфигурирован для реализации аналогичной последовательности, но он реагирует на каждые 10 отсчетов обмоток, что означает, что его светодиоды перескакивают с одного вывода на другой в ответ на каждые 100 отсчетов обмоток или 100 чисел включения трансформатора.
Короче говоря, последовательность выходов светодиодов IC1 завершается одним циклом с каждыми 10 обмотками, IC2 с каждыми 100 обмотками и IC3 с каждой 1000 обмоток. Следовательно, показанная схема имеет ограничение в 1000 оборотов, если требуется больше, чем это значение, то можно добавить дополнительные каскады IC таким же образом, как подключены IC2 и IC3.
Цифровая схема счетчика обмоток трансформатора
Если вышеупомянутая версия схемы счетчика обмоток трансформатора выглядит низкотехнологичной, можно использовать следующую высокотехнологичную конструкцию, в которой для индикации используются 7-сегментные дисплеи с общим катодом.
Идея заключается в использовании нескольких микросхем счетчиков 4033, соединенных каскадом, для получения 4-значного выходного сигнала для индикации количества оборотов, подсчитываемых в цифровой форме.
Принципиальная схема
Здесь герконовый переключатель и связанные с ним части остаются идентичными предыдущей версии светодиода и оснащены входом модуля счетчика 4033 для требуемого запуска цифр в ответ на каждый счет обмотки трансформатора.
900 Машина для намотки катушек сверхбольшой емкости с очень высоким крутящим моментом
Описание
Намотчик рулонов Broomfield 900 — это односкоростная машина, которая может обрабатывать большие тяжелые рулоны и обеспечивать очень высокий крутящий момент намотки. Наша самая мощная односкоростная намоточная машина, она может изготавливаться с различными скоростями и крутящими моментами в соответствии с вашими требованиями.
Характеристики:
- Доступны три стандартные модели:
900A: Подъемная бабка.
900B: Подъемная бабка с точными направляющими, установленными на задней бабке.
900C: Подъемная бабка, задняя бабка на прецизионных направляющих и автоматический механизм перемещения направляющей для проволоки. - Односкоростной диапазон с переменной скоростью.
- Прочная сварная стальная конструкция.
- Пневматический дисковый тормоз для принудительного торможения.
- Электронная направляющая для проволоки: предусмотрены два прецизионных стиля наслоения; Параллельно и спирально (900C).
- Время настройки минимизировано за счет использования электронных средств управления для точной настройки шага проволоки и остановки при желаемом количестве витков (900C). Оператору нужно только ввести эти данные и установить ограничители ширины намотки.
- Система обратного изгиба исключает необходимость измельчения проволоки или прессования катушек для придания им формы, производит более плотные катушки и использует меньше проволоки (900C).
- Легко адаптируется для намотки одной или нескольких катушек.
Моторное оборудование: 15 л.с. (11.19 кВт) — двигатель переменного тока 75 л.с. (55,95 кВт) с ножным управлением и векторным приводом с регулируемой скоростью.
Лицевая панель: Диаметр 22 дюйма (558,8 мм).
Первичный редуктор: Ремень и шкив.
Вторичный редуктор: Редуктор.
Скорость шпинделя: На одно приложение.
Максимальный крутящий момент: 15000 фут-фунтов. (20340 Нм)
Требования к мощности: Электрические: Доступны различные значения мощности и трехфазного напряжения, в зависимости от применения.
Воздух: 80 фунтов на квадратный дюйм (5,5 бар) при минимальной куб.
Вращение шпинделя: Любое направление может быть выбрано переключателем на панели управления.
Высота центра шпинделя: 49,5 дюйма (1257,3 мм) от пола.
Тормоз: Пневматический дисковый тормоз на двигателе шпинделя и пневмогидравлический дисковый тормоз на лицевой панели, приводимый в действие путем снятия ноги с регулятора скорости, счетчика общего числа оборотов или кнопки аварийной остановки.
Задняя бабка: Устанавливается на прецизионных способах позиционирования в любом месте вдоль оси завода. Ход пиноли 4 дюйма (101,6 мм). Прочная рама и пиноль. Подвижный центр 60 ° в конусе Морзе № 5 или № 6.
Максимальное расстояние между центрами:
900B и 900C: 65 дюймов (1651 мм)
Максимальный диаметр поворота:
900A: 98 дюймов (2489,2 мм)
900B & 900C: 74 дюйма (1879,6 мм)
Максимальный вес:
Зависит от конфигурации машины.
Управление машиной:
Модели A и B: Программируемый электронный счетчик.
C Модель: S-50 контроллер намотки с 50 программируемыми остановками, 7 программами, параллельным и спиральным наслоением и концевыми ограничителями для определения ширины намотки.
Вес:
900A: 6500 фунтов. (2948,35 кг)
900B: 8300 фунтов. (3764,81 кг)
900C: 19700 фунтов. (8935,77 кг)
Опции:
- Контроллер Broomfield MP-5 автоматически координирует функции намотки и обеспечивает хранение программ.
- Многопроволочная направляющая в сборе.
- Шкивы для проволоки квадратного и прямоугольного сечения.
- Автоматический запуск.
- Увеличенная длина станка.
- Поворотный диаметр большего диаметра.
- Устройства безопасности зоны обмотки.
- Устройство для снятия / натяжения бумажной изоляции.
- Многокатушечная обмотка.
- Пользовательские модификации для специальных приложений.
Для получения дополнительной информации об оборудовании для намотки катушек или других машинах Broomfield, пожалуйста, свяжитесь с нами напрямую по телефону (978) 779-6600 или через нашу онлайн-форму.
Планы намоточной машины— Добавлен счетчик — Библиотека Philco
[Предоставлено Ed (etech)]
Часть 1
Некоторые из вас видели машину для намотки катушек в моем посте о перемотке тенометров Philco и спрашивали, как ее построить. Я построил свою машину, показанную здесь, по планам, которые я получил от Гэри (Radiofixer).
Намоточный станок
Педаль
Гэри разрешил мне распространять его статьи о конструкции этой машины среди тех, кому они нужны.Имея это в виду, я спросил Эда (Кузнеца), будет ли он размещать файлы на своем сервере, по крайней мере, на короткий период времени, чтобы те, кому они нужны, могли их загрузить. Эд любезно согласился разместить файлы. Вы можете найти их здесь.
http://www.renovatedradios.com/
Просто нажмите на страницу загрузки, и вы найдете статьи о машине для намотки катушек на этой странице. Затем просто щелкните файлы правой кнопкой мыши, чтобы «сохранить как» на своем компьютере. Первый файл — 5,3 МБ, второй — 3.7 МБ.
Вы заметите, что машина, которую я сконструировал, не совсем такая же, как та, которую описал Гэри, но фактически та же самая в принципе. Я просто немного изменил планы, чтобы использовать материалы, которые у меня были под рукой, или материалы, которые были мне легко доступны. Сердцем станка является 18-вольтный реверсивный буровой двигатель 3/8 с регулируемой скоростью, работающий от аккумулятора. Я купил свой на распродаже в Harbour Freight примерно за 14 долларов. Я разобрал электродвигатель и смонтировал его, как описано в статье Гэри.Я сделал педаль, установив оригинальный контроллер триггера и аккумулятор от аккумуляторной дрели, как вы можете видеть на второй фотографии. Кроме того, я приобрел оборудование на сумму около 5 долларов для завершения проекта, включая резьбовой стержень 3/8 дюйма, который используется в качестве подающего и приемного шпинделей, а также L-образные кронштейны и другие гайки, болты и шайбы. по мере необходимости для завершения проекта. В целом, мои фактические денежные затраты на сборку базовой машины составляли менее 20 долларов, при условии, что у вас будет достаточно древесины в вашей коллекции хлама для сборки коробки.
Вы заметите на моей машине несколько дополнительных элементов, которых не было в исходной версии Гэри. Одним из них является добавление переключателя прямого и обратного хода вверху на монтажном кронштейне двигателя, чтобы упростить переключение вращения. Мне также нужно было найти способ стабилизировать катушки или шпульки, чтобы они вращались правильно, поскольку все они имеют центральные втулки разного размера. Для этого я нашел черные деревянные шары, показанные на приемном шпинделе на фотографии выше. Я нашел их в разделе ремесел в Walmart.Необходимо было только просверлить в них отверстие диаметром 3/8 дюйма, чтобы их можно было разместить на шпинделях. С их помощью центральная втулка любого размера будет принудительно центрирована и «истинно» вращается на шпинделях.
С помощью этой машины вы можете поместить катушку с проволокой на подающий (нижний) шпиндель или просто положить катушку на пол между ногами для процесса разматывания.
Я использовал этого поставщика для магнитной проволоки. http://www.oemwire.com/index.html Его цены разумные, и у него хороший выбор.Снимать изоляцию не требуется. Я просто нагреваю провод паяльником и наношу припой. В течение нескольких секунд изоляция сгорает, а провод лужится.
Вместо того, чтобы создавать КМОП-счетчик оборотов, который Гэри использовал в своей машине, я купил суммирующий ЖК-счетчик Redington у SMC Electronics за 12,50 долларов
http://www.smcelectronics.com/emod.htm
и сигнализация дверного окна, которая содержит герконовый переключатель и магнит за 1 доллар.99 от Harbour Freight. Я еще не реализовал это, но основная идея состоит в том, чтобы установить магнит на приемном (приводном от двигателя) шпинделе и установить поблизости герконовый переключатель. Выходной сигнал переключателя будет подаваться на модуль счета ЖК-дисплея, чтобы обеспечить счетчик оборотов для машины. Стоимость этих дополнительных деталей не была включена в стоимость материалов, указанную выше.
ЖК-счетчик и геркон
Я построил и использовал свою машину в основном для перемотки полевых катушек динамиков для некоторых из моих радиоприемников, для которых запасные динамики либо недоступны, либо довольно дороги.Я недавно использовал его для перемотки пары тенометров Philco. Очевидно, что у такой машины есть много других применений, и я могу засвидетельствовать тот факт, что преимущества окупаются потраченным на ее создание временем. Буду рад ответить на любые вопросы по конструкции машины, если кто-то решит ее построить.
Часть 2
Наконец-то я решил добавить счетчик к моей самодельной катушечной намоточной машине. Вот пара фоток.
Сначала я провел небольшое тестирование, чтобы увидеть, что потребуется для работы счетчика.Он имеет автономную батарею, срок службы которой, по заявлению производителя, составляет десять лет, и питание постоянно включено. Я измерил батареи в домашней охранной сигнализации и обнаружил, что они вырабатывают всего 4 вольта, чего недостаточно для срабатывания счетчика, поскольку для его запуска или сброса требуется минимум 5 вольт постоянного тока. Итак, я решил вынуть батарейки из домашней охранной сигнализации и использовать внешнюю батарею на 9 вольт.
Я вырезал на печатной плате следы от геркона внутри детектора домашней охранной сигнализации и вытащил два провода герконового переключателя через отверстие, которое я просверлил в боковой части коробки.Я подумал, что оригинальная коробка будет хорошим способом установить герконовый переключатель. Это сработало просто отлично. Я просто использовал двусторонний скотч, чтобы приклеить коробку к боковой стенке намотчика катушек.
Я установил магнитный узел на ведомый вал с помощью двусторонней ленты, поставляемой производителем. Я решил, что узел магнита недостаточно надежен, поэтому добавил пару обмоток изоленты вокруг него, чтобы закрепить узел магнита. Я обнаружил, что размещение узла магнита не слишком критично, отрегулируйте его для лучшей работы геркона.Затем я протестировал магнитный узел на максимальной скорости моего приводного двигателя, 500 об / мин, и он показался мне очень прочным, поэтому я продолжил установку.
Как вы можете видеть, я установил кронштейн батареи 9 В на боковую стенку устройства намотки катушки и проложил провода к герконовому переключателю и счетчику таким образом, чтобы не мешать механической работе устройства.
Я установил счетчик на L-образный кронштейн, который нашел в своем ящике для мусора, а также добавил к кронштейну нормально разомкнутый кнопочный переключатель мгновенного действия, который будет использоваться в качестве кнопки сброса счетчика.Затем я приступил к установке L-образного кронштейна сбоку устройства намотки катушки в месте, где его можно было легко увидеть.
Проверка работы счетчика показала, что он будет работать правильно от очень низкой скорости до максимальной скорости приводного двигателя. Это расположение счетчика должно быть очень легко скопировать. Кстати, недавно я видел ту же самую домашнюю охранную сигнализацию, которую я использовал в этой сборке за 99 центов в моем местном магазине Dollar Tree.
DIY Машина для намотки тороидальной катушки на базе Arduiuno
Здравствуйте, друзья. Я сделал машину для намотки тороидальной катушки на базе Arduino.
Я сделал эту машину, используя Arduino в качестве контроллера. Эта машина автоматически наматывает витки, а также автоматически вращает сердечник тороида.Для пользовательского ввода и взаимодействия я использовал поворотный энкодер и ЖК-дисплей 16 × 2. Пользователь может ввести такие данные, как диаметр сердечника тороида, количество витков и площадь, которую необходимо намотать сердечнику тороида.
В этом посте я расскажу вам, как я построил эту машину, и дам вам некоторые подробности об этой машине.
ВИДЕО
Это полное видео о машине для намотки тороидальной катушки Arduino, которую вы можете посмотреть или продолжить читать.
ТОВАР Б / У
список элементов, необходимых для создания собственной намоточной машины с тороидальной катушкой Arduino.
- Arduino NANO
- A4988 ШАГОВЫЙ ДРАЙВЕР
- РОТАЦИОННЫЙ ЭНКОДЕР
- 16X2 I2C ЖК-ДИСПЛЕЙ
- NEMA 17 ШАГОВЫЙ ДВИГАТЕЛЬ
- ДВИГАТЕЛЬ
- РЕМЕНЬ ГРМ
- L293D IC
- ПРОФИЛЬНЫЙ НОМЕР ПРОФИЛЬНЫЙ НОМЕР L293D IC
- 20 X 20 ФАНЕРА 12ММ
КОНСТРУКТИВНЫЕ ДЕТАЛИ
КОЛЬЦО БУТОВОЕ
Это катушечное кольцо, которое я сделал из фанеры толщиной 12 мм, его внешний диаметр составляет 145 мм, а внутренний диаметр — 122 мм. Оно имеет канавку длиной 43 мм и глубиной 5 мм для катушки.
Он имеет один разрез по периметру, и замок используется для запирания этой открытой части.
, открыв этот замок, мы можем поместить тороидальную катушку внутрь кольца.
Это деревянное кольцо также имеет канавку шириной 8 мм и глубиной 4 мм по окружности для установки в него ремня ГРМ 6 мм.
СПУЛЬТ
Это катушка с медной проволокой, которую я сделал из нейлонового стержня,
все необходимые размеры показаны на рисунке.
, почему я выбрал нейлоновый стержень, чтобы сделать его, потому что нейлоновый стержень легче, чем алюминий.также легко обрабатывается.
и когда он движется вместе с кольцом, он не создает никаких уравновешивающих нарушений при движении
КОРПУС МАШИНЫ ДЛЯ НАМОТКИ ТОРОИДНЫХ БАТУШЕК ARDUINO
Эта рама кузова также изготовлена из фанеры толщиной 12 мм, есть три направляющих ролика, установленных примерно на 120 градусов. Ролики
состоят из подшипника 626Z и нескольких болтов с гайкой, наше деревянное золотниковое кольцо будет вращаться на этом ролике.
Верхняя часть части рамы выполняет роль рычага освобождения кольца с помощью барашковой гайки.
Помещая кольцо внутри машины, нам нужно ослабить барашковую гайку и, потянувшись, поднять освобождающий рычаг.
После установки кольца опустите рычаг так, чтобы оранжевое колесо вошло в канавку кольца, и затяните барашковую гайку.
Таким образом кольцо сидит на нем и не сдвигается во время бега.
РОЛИКОВЫЕ ДЕРЖАТЕЛИ СПЕРМЫ С ТОРОИДНЫМ РОЛИКОМ
Это роликовый держатель с тороидальным сердечником. Я сделал этот ролик из нейлонового стержня на своем мини-токарном станке.
Все необходимые размеры и детали даны на изображении выше.
Я наклеил на ролик ленту из пеноматериала, она будет очень хорошо удерживать сердечник, без этого сердечник из пенопласта будет скользить во время движения.
Барашковые гайки наиболее важны в этом сценарии, нормальные гайки будут смещаться при вибрации.
Я также установил два фланцевых подшипника, один для верхнего и один для нижнего на каждом ролике.
РАСПРЕДЕЛЕНИЕ ШАГОВОГО ДВИГАТЕЛЯ
Это устройство для шагового двигателя, я использовал здесь шаговый двигатель NEMA17.
Этот двигатель будет вращать сердечник тороида и автоматически наматывать на него провод.так что нам не нужно вращать сердечник рукой. за счет этого мы получаем равномерную намотку по всей длине сердечника.
РАСПРЕДЕЛЕНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Этот двигатель постоянного тока вращает золотниковое кольцо, я использовал ОРАНЖЕВЫЙ ДВИГАТЕЛЬ JHONSON 12 В постоянного тока 300 об / мин.
Но я предлагаю вам установить скорость 600 или 1000 об / мин.
В этом проекте используется зубчатый ремень 6 мм с окружностью 600 мм.
Я сделал деревянный зажим для крепления этого мотора на ALU 20 × 20. экструзия.
ИК-ДАТЧИК
ИК-датчик используется для подсчета количества витков.
Я использовал ИК-датчик семян студии, этот датчик посылает сигнал на контакт прерывания Arduino.
и arduion подсчитывают количество оборотов, сделанных кольцом.
Этот датчик я установил на алюминий 20 × 20. Прифиле таким образом, чтобы замковое кольцо действовало как поверхность обнаружения для датчика.
, пожалуйста, обратите внимание, что этот датчик дает 2 выходных сигнала на один оборот, например, когда белая часть деревянного кольца находится перед датчиком, выходной сигнал низкий, когда черная часть выходит вперед, он снова становится от низкого до высокого, когда черная часть исчезла.
, поэтому вывод прерывания Arduino обнаруживает два изменения состояния на выводе, поэтому мне нужно разделить сигнал датчика на 2, чтобы получить фактические обороты.
Это то, что я сделал, если кто-нибудь знает другую лучшую идею, дайте мне знать в комментариях.
ОСНОВАНИЕ МАШИНЫ
Я снова использовал игровую доску толщиной 12 мм 300 x 200 мм, чтобы сделать основу машины.
Я установил четыре резиновые ножки на основание, это обеспечит очень устойчивую поддержку машине и предотвратит вибрацию.
20 × 20 алю. профиль используется для крепления деталей, мне очень нравится этот алу. profile, потому что они очень гибкие в использовании.
На них легко надеть вещь и очень легко сдвинуть назад или вперед.
помогает добиться правильного выравнивания между деталями.
БЛОК КОНТРОЛЛЕРА
Это коробка контроллера, напечатанная на 3D-принтере. Я поместил свою печатную плату внутрь этой коробки.
и установил ЖК-дисплей и кодировщик перед коробкой.
Это придаст нашему проекту очень профессиональный вид контроллера.
, а также упрощает пользовательский интерфейс.
Я установил этот блок контроллера на основание с помощью металлического кронштейна.
ЭЛЕКТРИЧЕСКИЙ ЧЕРТЕЖ
ЦЕПЬ МАШИНЫ НАМОТКИ ТОРОИДНОЙ КАТУШКИКОД
Код Arduino
ЖК-БИБЛИОТЕКА
БИБЛИОТЕКА ШАГОВЫХ ДРАЙВЕРОВ
ДЕТАЛИ НАВИГАЦИИ МЕНЮ
Эта машина для намотки тороидальной катушки Arduino имеет пользовательский интерфейс, такой как ЖК-дисплей для отображения данных и поворотный энкодер для пользовательского ввода.
Давайте посмотрим на детали каждого экрана.
Это первый экран, это просто экран приветствия.
Это второй экран, здесь мы должны ввести наружный диаметр сердечника тороида. У меня есть программная машина таким образом, чтобы он работал с сердечником тороида различного размера.
вам просто нужно ввести диаметр сердечника.
Это третий экран, здесь вы должны ввести количество витков, которое необходимо намотать на сердечник.
Это 4-й экран, здесь мы должны ввести область того, сколько сердечника необходимо намотать, например, 360 градусов означает полный один оборот сердечника.
, если мы введем 720, машина повернет сердечник два раза, чтобы намотать заданное количество оборотов.
5-й экран на этом экране вы можете перекрестно проверить все введенные вами данные, прежде чем продолжить. если вы уверены в данных, то и только затем нажмите ручку, чтобы запустить машину.
Вот 6-й экран, на этом экране отображаются номера поворотов в реальном времени
последний 7-й экран появляется после завершения намотки.
Вы хотите, чтобы эта машина была выставлена на продажу? Загрузка…
Проголосуйте и оставьте комментарий, что нужно улучшить в этой машине.
Цифровой счетчик намоточной машиныс использованием Arduino & … | element14
Недавно я выполнил проект по замене старого механического счетчика моей намоточной машины на цифровой. Я сделал это, используя следующие основные компоненты:
- Оптический энкодер, 1024 отсчета на оборот с квадратурным выходом. Это позволяет определять как угол / обороты, так и направление (вперед или назад).
- Arduino для захвата импульсов энкодера и временного хранения счетчика.
- Raspberry Pi для кода Python более высокого уровня и для управления сенсорным экраном.
- Цветной сенсорный экран с диагональю 3,5 дюйма для отображения счетчика большими числами и для функции сброса, включения / выключения электромагнитного тормоза намоточной машины и для функции ВОССТАНОВЛЕНИЕ ПОСЛЕДНЕГО СЧЕТА.
- Черный пластиковый ящик для установки.
Счетчик постоянно обновляется и показывает 3 цифры целого числа, десятичный разряд и 1 цифру для десятых долей оборота.Одним из больших преимуществ этого цифрового счетчика перед более старым механическим счетчиком является то, что разрешение в 10 раз выше. С механическим счетчиком разрешение с точностью до поворота. Это затрудняет определение того, находится ли счет в X или X + 1. Например, если счетчик показывает 85 и находится рядом с углом шпинделя, где изменяется счет, будет трудно узнать, будет ли счет 85 или 86, пока угол поворота шпинделя не повернется далеко за угол, на который изменяется счет. Это легко может привести к ошибкам в количестве витков, намотанных на катушку трансформатора, что недопустимо.Однако с цифровым счетчиком, который считывает данные с точностью до 1/10 оборота, нет никаких сомнений в отношении целочисленного значения количества витков.
6-проводной кабель управления использовался для передачи различных сигналов от энкодера и тормоза к блоку счетчика. Для питания Arduino и Raspberry Pi использовалась настенная бородавка от 120 до 12 В постоянного тока. Кодировщику требовалось +12 В постоянного тока, но для Arduino и Pi требовалось 5 В постоянного тока и 3,3 В постоянного тока. Для этого использовался небольшой преобразователь постоянного тока в постоянный (с 12 В на 5 В постоянного тока).У Arduino был выход 3,3 В постоянного тока, который использовался для подтягивания выходов с открытым коллектором кодировщика. Код Arduino был довольно простым и понятным, поскольку он вводил два квадратурных импульсных входа, а код сохранял текущую сумму количества оборотов, включая прямое минус обратное. Причина этого в том, что если намоточная машина вращалась вперед, счетчик увеличивался в положительную сторону, но если остановился, а затем перевернулся, например, чтобы добавить ленту к катушке, счетчик вычтет количество обратных оборотов, включая дробные обороты чтобы количество витков провода всегда было точным.Если этого не было сделано или если использовался неквадратурный энкодер, счет будет увеличиваться при движении вперед или назад. В этом случае истинное количество ходов будет потеряно.
Постоянно обновляемое количество оборотов, а также состояние тормоза шпинделя и цифрового выхода для включения / выключения тормоза передавались с Arduino на Pi через USB. Pi напрямую принял цветной сенсорный дисплей в качестве штырей для удобной установки. Сложнее всего было установить дисплей в коробке вместе с Raspberry Pi за ним и Arduino, On / Off Sw, 4-мя отдельными кабелями с разъемами DIN и кабелями USB.Вырезать квадратное отверстие в коробке с помощью моего инструмента Dremel было особенно сложно с точки зрения сохранения прямых линий. Мне пришлось вручную заполнить файл, чтобы подобрать дисплей. Мне также пришлось сделать пару специальных кронштейнов, чтобы прикрутить дисплей к пластику коробки с помощью крошечных винтов 4-40. На фотографии ниже показан черный ящик с сенсорным дисплеем, электроникой и кабелями слева. У меня была фотография всей намоточной машины с черным ящиком, но редактор element14 перестал работать для вставки последующих фотографий после того, как я вставил первую фотографию.
ОС Raspberry Pi была Linnix, а для управления и отображения использовался Python. Счетчик работает отлично, проблем с ним не было. На сенсорном экране есть кнопка RESET, и если она нажата по ошибке, так что счетчик обнуляется на незавершенной катушке, мы добавили кнопку RESTORE COUNT, чтобы восстановить предыдущий счет, если RESET был нажат по ошибке. Наконец, есть кнопка на сенсорном экране и индикатор тормоза шпинделя. Обычно тормоз включен, когда ножной регулятор скорости не нажат.Однако в этом случае оператор намотки не может вращать шпиндель вручную, чтобы реверсировать его для добавления ленты и т. Д. Для решения этой проблемы оператор может нажать переключатель включения / выключения тормоза, и индикатор покажет, включен ли тормоз или нет данный момент. Код Pi хранится на карте microSD, а код Arduino записывается на микросхему микропроцессора.
Настольная намоточная машина для трансформаторов счетчик поворотов с самодельным ручным штабелером катушка шагового двигателя цена ветчина, купить тороидал на Ардуино сделать паспортные чертежи изготовление обычного БУ анкерного устройства для провода в принтере
Намоточная машина с интеллектуальными системами для зарядки заданного количества метров с точностью до 5 см.
Намоточная машина предназначена для намотки произвольной кольцевой обмотки на тороидальные каркасы (трансформаторы, тороидальные катушки) с высокой скоростью (до 800 оборотов в минуту) при качественной оценке.
Описание
Преимущества
Приложение
Технические характеристики
Описание:
Стол намоточного станка СНТ-0450ПБ предназначен для выполнения произвольной кольцевой намотки тороидальных каркасов (трансформаторов, тороидальных катушек) со скоростью 800 оборотов в минуту при качественной оценке.
Намоточная машина имеет интеллектуальные системы подачи топлива заданного количества метров с точностью до 5 см истинного счета оборотов с использованием датчика диапазона; система остановки станка при обрыве или конце провода; система автоматически останавливает машину при намотке на вершину обрыва.
Сверхмощная катушка позволяет наматывать многооборотную катушку без паяных соединений. Надежная система натяжения обеспечивает высокую равномерность намотки проволоки.
Преимущества:
— намотка провода на тор, как по количеству витков, так и по длине провода;
— наличие длинномера при намотке проволоки на катушку;
— точный счетчик оборотов на датчик переходных процессов;
— золотник датчика оборотов;
— функция датчика обрыва провода при намотке на катушку и на тор. Останавливает машину менее чем за один оборот в случае обрыва или обрыва проволоки.Эта функция работает с тремя датчиками: датчик скорости золотника, диапазона и длинномера. Машина контролирует датчики и отключение датчика длинномера или диапазона датчика дает команду на остановку машины;
— датчик закрытия золотника обеспечивает работу машины только с закрытой золотником. Предотвращает повреждение катушки, защищает оператора от травм;
— опорные ролики катушки, расположенные с внешней стороны катушки. Эта конструкция противодействует центробежной силе, стремящейся открыть катушку, снижает шумы и защищает катушку от вылета роликов, особенно когда проволока с катушки почти полностью перематывается;
— увеличенный до 47 мм диаметр роликов катушки с подшипниками No.80026 гарантирует долговечность машины;
программа компьютерной поддержки. Возможность запрограммировать намотку не только на станке, но и на компьютере и перенести ее с внешней карты памяти на блок управления станком и обратно;
Программа защиты обмотки от постороннего вмешательства. Аппарат блокирует доступ к изменению программы, если в разъем внешней карты памяти не вставлена карта памяти. Этот режим можно отключить, введя код;
— различные типы обмоток : последовательные, скоростные, сегментные, логарифмические и т. Д.;
— система защиты от помех и скачков напряжения в электросети. Устойчивость к российским сетям;
— режим электродинамического торможения двигателем. Обеспечивает резкую остановку катушки при обрыве либо конца проволоки, либо в конце намотки;
, имеющий две ручки ручного вращения шпули, как выяснили исследователи, облегчает работу станка;
— катушка № 4-7 разделена на две части , что дает возможность устанавливать и наматывать Тору больших размеров;
Поворотный стол для катушекимеет диапазон наружных диаметров намотанных катушек от 25 до 120 мм.;
— возможность наклона поворотного стола и регулировки его высоты. Это позволяет центрировать катушку относительно катушки;
— простота и скорость установки на поворотный стол сердечника и вывода катушки. Подпружиненный прижимной ролик быстро опускается к эксцентрику катушки, освобождая его;
— простота эксплуатации и обслуживания.
Заявление:
— тороидальные катушки произвольной обмотки.
Технические характеристики:
| Характеристики: | значение: |
| Диаметр намоточного провода, мм | 0,08-0,6 (в зависимости от количества катушек) |
| Мин. внутренний диаметр бухты после намотки (при бухтах до 20 мм мм | 9-32 |
| Диаметр катушки, мм | 201 |
| Полезное сечение катушки Whn, мм2 | 5-170 |
| Средняя длина одного витка на шпуле, мм | 617-565 |
| Скорость намотки (при 70 Гц), об / мин | 0-800 |
| Наибольший диаметр бухты после намотки, мм | 120 |
| Мин.наружный диаметр сердечника, мм | 25 |
| Макс. Высота рулона, мм | 40 |
| Высота раскладных роликов, мм | 16 (32) |
| Диаметр роликов блока, мм | 35 |
| Макс. масса бухты после намотки, кг | 5 |
| Механизм натяжения троса | пружина (магниты) |
| Макс спросил количество витков обмотки | 99999,9 |
| Макс.закрутка на шпуле, кгс | 5 |
| Входная мощность на обмотку, кВт | 0,18 |
| Диапазон регулирования крутящего момента, кг x м | 0-макс |
| Тип обмотки двигателя | асинхронный |
| Тип передаточного механизма обмотки | Ремень зубчатый |
| Тип датчика с подсчетом количества оборотов | оптический |
| Счет читаемости числа витков | 1 |
| Вентилятор принудительного охлаждения | по запросу |
| Тип трансмиссионного подъемника | шестерня |
| Схема ступеней, мм / об. | 0,00121-24,2 |
| Расстояние перехода между секциями, мм | 0,121-2420 |
| Макс.скорость разбрасывателя, мм / с | 150 |
| Регулировка макета шага | электронный редуктор |
| Доступная многоступенчатая компоновка ступеней дробления | 0,5 |
| Кол-во скоростей подъемника | 20000 |
| Макс.усилие приводного ролика штабелера, кгс | 10 |
| Количество приводных роликов штабелера | 2 |
| Материал роликов укладчика | безуглеродистая вакуумная резина |
| Наличие линейного укладчика | там |
| Тип двигателя подъемно-погрузочный комбайн | шаговый |
| Рекомендуемая частота работы двигателя в Гц | 0–70 |
| Максимально возможная частота работы двигателя в Гц | 120 |
| Время разворота разгрузчика (мин), ч | 1/300 |
| Датчик закрытия золотника | концевой выключатель |
| Длиномерный провод на катушке | там |
| Функция обрыва провода датчика при намотке на катушку | там |
| Режимы намотки | пусковая обмотка, Domotica |
| Архитектура (открытая / закрытая) | открыто |
| Тип размещения | стол |
| Габаритные размеры ДхШхВ: механизм намотки, мм Блок управления, мм | 450х720х520.420х260х360 |
| Масса блока управления, кг | 35 |
| Наличие защитного экрана | нет |
| Номинальная потребляемая мощность, кВт | 0,26 |
| Напряжение, частота источника питания, В / Гц | 220 ± 10% / 50 ± 2% |
| Тип электрозащиты IP | 44 |
| Климатическое исполнение | NF4.1 |
| Тип блока управления | ЧПУ |
| Возможность подключения педали (старт / стоп) | * |
| Возможность подключения интеллектуальной педали | * |
| Пульт дистанционного управления для подключения | * |
| Наличие лампы освещения рабочей зоны | * |
| Цветовое решение: RAL 7035 — серый, RAL 5018 — цвет морской волны | RAL 7035 |
| Возможность записи данных на компьютер | там |
| Количество различных повторяющихся участков | 1-100 (00… 99) / 1-3000 |
| Количество программ (суперпрограмм) Банк данных 1 (только) | 1-10 (1-160) |
| Тип натяжителя | ФНУ — 2 |
| Тип разматывающего устройства | БСУ-0,5 |
| Нужен фиксатор | нет |
| Необходимость установки станка на антивибрационную опору | нет |
Количество операторов, необходимых для работы на машине, чел.
Похожие записи
|