Serial — презентация онлайн
Похожие презентации:
3D печать и 3D принтер
Системы менеджмента качества требования. Развитие стандарта ISO 9001
Операционная система. Назначение и основные функции
Adobe Photoshop
AutoCAD история и возможности
Microsoft Excel
Облачные технологии
Корпорация Microsoft и ее особенности
Веб-дизайн
Тема 2. Пакеты прикладных программ
Serial
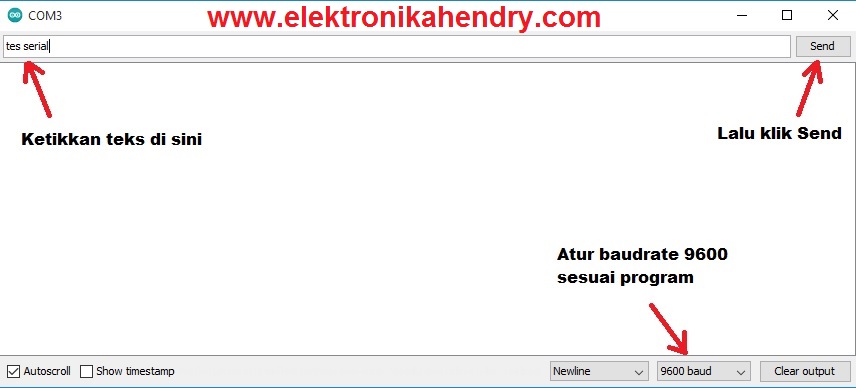
Набор функций Serial служит для связи устройства Ардуино с
компьютером или другими устройствами, поддерживающими
последовательный интерфейс обмена данными. Все платы Arduino
имеют хотя бы один последовательный порт (UART, иногда
называют USART). Для обмена данными Serial используют цифровые
порты ввод/вывода 0 (RX) и 1 (TX), а также USB порт.
Serial.begin()
Инициирует последовательное соединение и задает скорость передачи
данных в бит/c (бод). Для обмена данными с компьютером используйте
следующие значения: 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400,
 При соединение через порты вход/выхода 0 и 1 могут быть
При соединение через порты вход/выхода 0 и 1 могут бытьиспользованы другие значения скорости, требуемые устройством с которым
будет осуществляться обмен данными.
Синтаксис
Serial.begin (speed)
Параметры
speed: скорость в бит/c
Serial.end()
Закрывает последовательное соединение, порты RX и TX освобождаются и
могут быть использованы для ввод/вывода. Для восстановления
последовательного соединения используйте Serial.begin().
Синтаксис
Serial.end()
Параметры
нет
Serial.available()
Функция получает количество байт(символов) доступных для чтения из
последовательного интерфейса связи.
Синтаксис
Serial.available()
Serial.read()
Cчитывает очередной доступный байт из буфера последовательного
соединения.
Синтаксис
Serial.read()
Возвращает значение типа char или код из таблицы ASCI
Возвращает значение типа int
Serial.print()
Синтаксис
Serial.print(val)
Serial.print(val, format)
Параметры
val: данные для передачи через последовательное соединение
format: базис для целых чисел или количество знаков после запятой для
вещественных
Передает данные через последовательный порт как ASCII текст.
 Эта функция может принимать различные
Эта функция может принимать различныетипы данных. Так целые числа выводятся соответствующими им символами ASCII. Вещественные выводятся с
помощью двух ASCII символов, для целой и дробной части. Байты передаются как символ с соответствующим
номером. Симоволы и строки отсылаются как есть. Пример:
Serial.print(78) передается как «78»
Serial.print(1.23456) передается как «1.23»
Serial.print(byte(78)) передается как «N» (т.к. в таблице ASCII «N» под 78 номером)
Serial.print(«Hello world.») передается как «Hello world.»
С помощью второго опционально параметра можно задать базис (систему счисления) для чисел. Допустимые
значения BYTE, BIN (двоичный), OCT (восьмиричный), DEC (десятеричный), HEX (шестнадцатеричный). Для
вещественных (дробных) чисел второй параметр задает количество знаков после запятой. Пример:
Serial.print(78, BYTE) выводит «N»
Serial.print(78, BIN) выводит «1001110»
Serial.print(78, OCT) выводит «116»
Serial.
 print(78, DEC) выводит «78»
print(78, DEC) выводит «78»Serial.print(78, HEX) выводит «4E»
Serial.println(1.23456, 0) выводит «1»
Serial.println(1.23456, 2) выводит «1.23»
Serial.println(1.23456, 4) выводит «1.2346»
Serial.println()
Передает данные через последовательное соединение как ASCII текст с
следующим за ним символом переноса строки (ASCII символ 13 или ‘\r’) и
символом новой строки (ASCII 10 или ‘\n’). Пераметры и типы данных для этой
функции такие же, как и для Serial.print().
Синтаксис
Serial.println(val)
Serial.println(val, format)
Параметры
val: данные для передачи через последовательное соединение
format: базис для целых чисел или количество знаков после запятой для
вещественных
Serial.write()
Функция передает данные как бинарный код через последовательное
соединение. Данные послаются как один или серия байтов. Для того, чтобы
передать данные как символы следует использовать другую функцию print().
Синтаксис
Serial.
 write(val)
write(val)Serial.write(str)
Serial.write(buf, len)
Параметры
val: один байт
buf: массив байт
len: длина массива
English Русский Правила
|
Teensyduino предоставляет объект Serial, совместимый с
Серийный объект на стандартных платах Arduino. Обычно используется последовательный
для вывода информации на серийный монитор Arduino IDE. Обычно используется последовательный
для вывода информации на серийный монитор Arduino IDE.
недействительная установка () {
Серийный номер .begin(9600); // USB всегда 12 или 480 Мбит/сек
}
недействительный цикл () {
Серийный номер .println("Hello World...");
задержка(1000); // не печатайте слишком быстро!
}
В отличие от Arduino Uno и Mega, которые используют низкую скорость последовательной передачи данных, объект Teensy USB Serial
всегда обменивается данными на исходной скорости USB, либо 12, либо 480 Мбит/с.
Параметр скорости передачи с помощью Serial.begin(baud) игнорируется для последовательного порта USB (но
конечно используется с аппаратным серийным номером).
В Teensy 4.x рекомендуется откладывать, чтобы избежать печати.
так быстро, что прокрутка последовательного монитора требует слишком много обработки
сила.
На самом деле Teensy не станет серийным устройством, пока ваш скетч не будет запущен. Стандартные последовательные функцииПоддерживаются все стандартные последовательные функции.Последовательный.начало()Serial.begin() является необязательным для Teensy. Аппаратная инициализация USB выполняется перед запуском setup().Ввод скорости передачи игнорируется и используется только для совместимости с Arduino. Последовательная связь USB всегда происходит на полной скорости USB. Однако, см. функцию baud() ниже. Serial.begin() может ждать до 2,5 секунд для последовательной связи USB быть готовым. Для быстрого запуска программы просто не используйте этот ненужная функция. Его единственная цель — совместимость с программы, написанные для Arduino. Задержка предназначена для программ которые не проверяют логическое значение Serial. (логический) Серийный номерПроверьте, открылся ли последовательный монитор Arduino. Обычно это используется с циклом while для ожидания, пока последовательный монитор Arduino не будет запущен. готов к приему данных.
готов к приему данных.
недействительная установка () {
Серийный номер .println("Это может быть отправлено до того, как ваш ПК сможет получить");
пока (! серийный номер ) {
// ждем, пока Arduino Serial Monitor будет готов
}
Если вы будете использовать Teensy в автономном приложении без
серийный монитор, не забудьте удалить это ожидание, чтобы ваша программа
не оставаться вечно ждать серийный монотор.
В качестве альтернативы ожидание может быть выполнено с тайм-аутом.
в то время как (! серийный номер && миллис () < 15000) {
// ждем до 15 секунд для серийного монитора Arduino
}
Serial.print() и Serial.println()Напечатайте число или строку. Serial.print() печатает только число или строку и Serial.println() печатает его с символом новой строки.// Serial.print() может печатать множество разных типов целое число = 1234; Серийный номер .На стандартном Arduino эта функция ожидает, пока данные передаются. С Тинсидуино, Serial.print() и Serial.println() обычно возвращаются быстро, когда сообщение помещается в пределах USB-буферы. См. «Буферизация передачи» ниже. Серийный.write()Передать байт. Вы также можете использовать Serial.write(buffer, length) для отправки более один байт за раз, для очень быстрой и эффективной передачи данных.Серийный. доступный()
Возвращает количество полученных байтов, доступных для чтения, или ноль, если ничего не было получено. доступный()
Возвращает количество полученных байтов, доступных для чтения, или ноль, если ничего не было получено.
На стандартном Arduino Serial. available() имеет тенденцию сообщать об отдельных байтах, тогда как большие блоки могут быть мгновенно доступны с Teensyduino. Подробности см. в разделе «Буферизация приема» ниже. Обычно возвращаемое значение из Serial. available() следует проверять как логическое значение либо есть или нет данных. Только байты, доступные из самого последнего полученный USB-пакет виден. Видеть Подробнее о неэффективных однобайтовых USB-пакетах см. ниже. Последовательный.чтение()Прочитать 1 байт (от 0 до 255), если доступно, или -1, если ничего не доступно. Обычно Serial.read() используется после Serial.available(). Например:
если ( серийный номер .доступно()) {
incomingByte = Serial .read(); // не будет -1
// делаем что-то с incomingByte
}
Серийный.flush()Подождите, пока все переданные данные все еще находятся в буферах, чтобы начать передачу. Если в буфере нет данных, ожидающих передачи, функция flush() немедленно возвращается. Если в буфере нет данных, ожидающих передачи, функция flush() немедленно возвращается.
Arduino 0022 и 0023: flush() отбрасывает любые полученные данные, которые не были прочитаны. Последовательные USB-удлинители TeensyTeensyduino предоставляет расширения для стандартного последовательного объекта Arduino, поэтому вы можете получить доступ к функциям, специфичным для USB.Serial.send_now()Передайте любые буферизованные данные как можно скорее. См. «Буферизация передачи» ниже.Серийный.dtr()Прочитайте состояние сигнала DTR. По умолчанию DTR имеет низкий уровень, когда нет программного обеспечения. последовательное устройство открыто, и оно становится высоким, когда программа открывает порт. Некоторые программы переопределяют это поведение, но для обычного программного обеспечения вы можете использовать DTR, чтобы знать, когда программа использует последовательный порт.
недействительная установка () {
}
недействительный цикл () {
pinMode(6, ВЫХОД); // Светодиод, показывающий, использует ли программа последовательный порт
цифровая запись (6, ВЫСОКИЙ); // (активный низкий уровень сигнала, ВЫСОКИЙ = светодиод не горит)
в то время как (! Серийный номер .
На стандартном Arduino сигналы DTR и RTS присутствуют на контактах платы.
Чип FTDI, но они ни к чему не подключены. Вы можете паять
провода между контактами ввода-вывода и чипом FTDI, если вам нужны эти сигналы.
Серийный.rts()Прочитайте состояние сигнала RTS. USB автоматически включает управление потоком, поэтому вам не нужно читать этот бит, чтобы узнать, готов ли ПК к приему ваши данные. Независимо от того, насколько быстро вы передаете, USB всегда управляет буферами поэтому все данные доставляются надежно. Тем не менее, вы можете вызвать перегрузку ЦП. использование принимающей программой является приложением Java с графическим интерфейсом как серийный монитор Arduino!
Для программ, которые используют RTS для передачи некоторой полезной информации, вы можете прочитать
это с этой функцией. Драйвер Windows USBSER.SYS имеет известная ошибка где изменения, внесенные в RTS, не сообщаются Teensy (или любым другим доскам с использованием протокола CDC-ACM) до тех пор, пока не будет записан DTR. Некоторые программы, такие как CoolTerm, обойти эту ошибку. Последовательный.бод()Считайте настройку скорости передачи с ПК или Mac. Связь всегда выполняется на полной скорости USB. Скорость передачи полезна, если вы собираетесь сделать USB-последовательный мост, где вам нужно знать, какая скорость ПК намеревается использовать последовательную связь.Последовательный.стопбиты()Считайте настройку стоповых битов с ПК или Mac. USB никогда не использует стоп биты.Serial.paritytype()Считайте настройку типа четности с ПК или Mac. USB использует проверку CRC на всех пакетах данных в массовом режиме и автоматически ретранслирует поврежденные данные, поэтому биты четности никогда не используются.Серийный.numbits()Считайте настройку числа битов с ПК или Mac. USB всегда общается
8-битные байты. USB всегда общается
8-битные байты.
Сведения о буферизации и синхронизации USBОбычно объект Serial используется для передачи и приема данных без беспокоясь о более тонких деталях синхронизации. Это "просто работает" в большинстве случаев. Но иногда важны детали времени связи, особенно передачи на ПК.Буферизация передачиНа Arduino Uno и Mega при передаче с помощью Serial.print() байты медленно передаются через аппаратный последовательный порт на преобразователь USB-Serial чип.На Teensy Serial.print() записывает непосредственно в буфер USB. Если все ваше сообщение помещается в буферную память, Serial.print() возвращается к вашему эскизу очень быстро. И Teensyduino, и микросхема USB-Serial содержат частично заполненный буфер. если вы хотите передать больше данных. Обычно после короткого перерыва 3-5 мс в Teensyduino, запланирована передача частично заполненного буфера на USB.
Teensyduino немедленно планирует любой частично заполненный буфер для передачи
когда вызывается функция Serial. Вся пропускная способность USB управляется чипом хост-контроллера на вашем ПК или Мак. Когда полный или частично заполненный буфер готов к передаче, фактическая передача происходит, когда позволяет хост-контроллер. Обычно это Чип хост-контроллера запрашивает передачу данных много тысяч раз за во-вторых, хотя на синхронизацию могут влиять другие USB-устройства, потребляющие большую часть доступной полосы пропускания USB. Когда хост-контроллер получает данные, операционная система затем планирует выполнение принимающей программы. В Linux открыты последовательные порты с опцией «низкая задержка» пробуждаются быстро, другие обычно ждут до нормальной "галочки" запускать. Windows и MacOS, вероятно, добавят процесс задержки в расписании. Сложные среды выполнения (например, Java) также могут добавить существенную задержку. Буферизация приемаКогда ПК передает, обычно хост-контроллер отправляет как минимум первый USB-пакет в течение следующей 1 мс. И Teensyduino, и
Чип FTDI на Arduino получает полный USB-пакет (и проверяет его проверку CRC).
Затем чип FTDI отправляет данные на стандартный Arduino через медленный последовательный порт.
Скетч, многократно вызывающий Serial.available() и Serial.read(), будет
имеют тенденцию видеть каждый байт, тогда многие вызовы Serial.availble() вернутся
false, пока следующий байт не прибудет через последовательную связь. И Teensyduino, и
Чип FTDI на Arduino получает полный USB-пакет (и проверяет его проверку CRC).
Затем чип FTDI отправляет данные на стандартный Arduino через медленный последовательный порт.
Скетч, многократно вызывающий Serial.available() и Serial.read(), будет
имеют тенденцию видеть каждый байт, тогда многие вызовы Serial.availble() вернутся
false, пока следующий байт не прибудет через последовательную связь.
недействительный цикл () {
// В Arduino с последовательным интерфейсом байты обычно приходят по одному
// так что этот цикл while обычно обрабатывает только 1 байт, прежде чем разрешить
// остальная часть функции цикла выполняет свою работу
в то время как ( серийный номер .доступно()) {
incomingByte = Serial .read();
// делаем что-то с incomingByte
}
// делаем другие несвязанные вещи
время_чувствительная_задача1();
другая_срочная_вещь();
все еще_еще_даже_больше_вещей();
}
На
Teensy, весь пакет, до 64 байт на Teensy 2 и 3 со скоростью 12 Мбит/с,
до 512 байт на Teensy 4 со скоростью 480 Мбит/с, все становится доступным сразу. Эскизы, выполняющие другую работу во время получения данных, могут зависеть от
медленное поведение приема, когда последовательные вызовы Serial.available()
очень маловероятно, чтобы вернуться true. О получении Тинси крупных сумм
данных, может потребоваться добавить переменную для подсчета количества
байт обработано и ограничивает задержку перед выполнением другой важной работы.
быть сделано.
Эскизы, выполняющие другую работу во время получения данных, могут зависеть от
медленное поведение приема, когда последовательные вызовы Serial.available()
очень маловероятно, чтобы вернуться true. О получении Тинси крупных сумм
данных, может потребоваться добавить переменную для подсчета количества
байт обработано и ограничивает задержку перед выполнением другой важной работы.
быть сделано.
недействительный цикл () {
// На Teensy большие группы байтов имеют тенденцию поступать одновременно.
// Этот счетчик байтов позволяет не тратить слишком много времени на их обработку.
беззнаковое целое число байтов = 0;
в то время как ( серийный номер .доступно () && число байтов < 10) {
incomingByte = Serial .read();
// делаем что-то с incomingByte
количество байт++;
}
// делаем другие несвязанные вещи
время_чувствительная_задача1();
другая_срочная_вещь();
все еще_еще_даже_больше_вещей();
}
Неэффективные однобайтовые пакеты USBПри передаче Serial. write() и Serial.print() группируют байты из последовательных
записывает вместе в пакеты USB, чтобы наилучшим образом использовать пропускную способность USB. Ты
можно переопределить это поведение с помощью Serial.send_now(), но по умолчанию несколько записей
объединяются в пакеты. write() и Serial.print() группируют байты из последовательных
записывает вместе в пакеты USB, чтобы наилучшим образом использовать пропускную способность USB. Ты
можно переопределить это поведение с помощью Serial.send_now(), но по умолчанию несколько записей
объединяются в пакеты.
Microsoft Windows и Linux, к сожалению, НЕ предоставляют подобную функцию, когда передача данных. Если приложение записывает неэффективно, например, один байт за раз каждый байт отправляется в одном USB-пакете (который мог содержать 64 или 512 байт). Хотя это плохо использует полосу пропускания USB, больше беспокоит то, как это влияет на буферизация, как это видно из Serial.available().
Аппаратное обеспечение USB, присутствующее в Teensy, может буферизовать 2 пакета USB. Серийный.доступный()
сообщает количество непрочитанных байтов только из первого пакета. Если
пакет содержит только 1 байт, Serial.available() вернет 1, независимо от
сколько байтов может присутствовать во 2-м пакете или сколько байтов может быть
ожидание большего количества пакетов, все еще буферизованных хост-контроллером USB ПК. Этот код не будет работать на Teensy, когда ПК передает ожидаемое 11-байтовое сообщение. более чем в 1 USB-пакете.
// Это может не работать на Teensy, если USB-пакеты имеют размер менее 11 байт!
логическое значение getNumbersFromSerial() {
while ( Serial . available() < 11) { ;} // ожидание 11-байтового сообщения
если ( серийный номер .read() == '@') {
time_t pctime = 0;
для (целое я = 0; я < 10; я ++) {
char c = Серийный номер .read();
если (с >= '0' && с <= '9') {
pctime = (10 * pctime) + (c - '0') ; // преобразовать цифры в число
}
}
компьютерное время += 10;
DateTime.sync (время ПК); // Синхронизируем часы с полученным временем
вернуть истину; // вернуть true, если получено сообщение о времени
}
вернуть ложь; //если нет сообщения, возвращаем false
}
Этот код можно переписать так, чтобы он всегда считывал байт, когда Serial. available() возвращает ненулевое значение.
// Это всегда будет работать на Teensy, не зависит от размера буфера
логическое значение getNumbersFromSerial() {
целое число = 0;
char buf[11];
в то время как (количество < 11) {
if ( Serial .
Конечно, всегда есть много способов написать программу. Версии выше выглядят для символа '@', чтобы начать сообщение, но не обрабатывать случай, когда дополнительный байты (неправильно) появляются перед 10-значным числом. Также не обязательно хранить все сообщение в буфере, так как работа может выполняться по мере того, как байты читать. Вот более надежная и эффективная версия.
// Эта версия более надежная
логическое значение getNumbersFromSerial() {
количество счетчиков = 0;
time_t pctime = 0;
в то время как (количество < 10) {
если ( серийный номер .
|
 поэтому вы должны выбрать последовательный порт (меню Tools -> Serial Port) после
начинается ваш эскиз.
поэтому вы должны выбрать последовательный порт (меню Tools -> Serial Port) после
начинается ваш эскиз.
 println("строка"); // нить
Серийный номер .println('a'); // один символ
Серийный номер .println(номер); // число (база 10, если 16 или 32 бита)
Серийный номер .println(номер, DEC); // число, основание 10 (по умолчанию)
Серийный номер .println(номер, HEX); // число, основание 16/шестнадцатеричное
Серийный номер .println(номер, OCT); // число, основание 8/восьмеричное
Серийный номер .println(номер, БИН); // число, основание 2/двоичное
Серийный номер .println(3.14); // число с плавающей запятой, 2 цифры
println("строка"); // нить
Серийный номер .println('a'); // один символ
Серийный номер .println(номер); // число (база 10, если 16 или 32 бита)
Серийный номер .println(номер, DEC); // число, основание 10 (по умолчанию)
Серийный номер .println(номер, HEX); // число, основание 16/шестнадцатеричное
Серийный номер .println(номер, OCT); // число, основание 8/восьмеричное
Серийный номер .println(номер, БИН); // число, основание 2/двоичное
Серийный номер .println(3.14); // число с плавающей запятой, 2 цифры
 dtr()) {
// ждем, пока пользователь запустит последовательный монитор
}
цифровая запись (6, НИЗКИЙ);
задержка(250);
Serial .println("Привет, новый сеанс последовательного монитора");
в то время как ( серийный номер .dtr()) {
Серийный номер .print('.'); // ждем, пока пользователь покинет последовательный монитор
задержка(500);
}
}
dtr()) {
// ждем, пока пользователь запустит последовательный монитор
}
цифровая запись (6, НИЗКИЙ);
задержка(250);
Serial .println("Привет, новый сеанс последовательного монитора");
в то время как ( серийный номер .dtr()) {
Серийный номер .print('.'); // ждем, пока пользователь покинет последовательный монитор
задержка(500);
}
}
 send_now().
send_now().

 available()) { // получаем все 11 байт в "buf"
buf[count++] = Серийный номер .read();
}
}
если (buf[0] == '@') {
time_t pctime = 0;
for(int i=1; i < 11; i++) {
char c = buf[i];
если (с >= '0' && с <= '9') {
pctime = (10 * pctime) + (c - '0') ; // преобразовать цифры в число
}
}
компьютерное время += 10;
DateTime.sync (время ПК); // Синхронизируем часы с полученным временем
вернуть истину; // вернуть true, если получено сообщение о времени
}
вернуть ложь; //если нет сообщения, возвращаем false
}
available()) { // получаем все 11 байт в "buf"
buf[count++] = Серийный номер .read();
}
}
если (buf[0] == '@') {
time_t pctime = 0;
for(int i=1; i < 11; i++) {
char c = buf[i];
если (с >= '0' && с <= '9') {
pctime = (10 * pctime) + (c - '0') ; // преобразовать цифры в число
}
}
компьютерное время += 10;
DateTime.sync (время ПК); // Синхронизируем часы с полученным временем
вернуть истину; // вернуть true, если получено сообщение о времени
}
вернуть ложь; //если нет сообщения, возвращаем false
}
 доступно()) {
char c = Серийный номер .read();
если (с == '@') {
ПК-время = 0; // всегда начинать заново при получении '@'
количество = 0;
} еще {
если (с >= '0' && с <= '9') {
pctime = (10 * pctime) + (c - '0') ; // преобразовать цифры в число
количество++;
}
}
}
}
DateTime.sync (время ПК); // Синхронизируем часы с полученным временем
}
доступно()) {
char c = Серийный номер .read();
если (с == '@') {
ПК-время = 0; // всегда начинать заново при получении '@'
количество = 0;
} еще {
если (с >= '0' && с <= '9') {
pctime = (10 * pctime) + (c - '0') ; // преобразовать цифры в число
количество++;
}
}
}
}
DateTime.sync (время ПК); // Синхронизируем часы с полученным временем
}
Все, что вы должны знать о Python Serial Read
Последовательные порты — это интерфейсы последовательной связи, через которые информация передается последовательно, по одному биту за раз. С другой стороны, параллельные порты передают несколько битов одновременно. PySerial и такие функции, как последовательное чтение Python, упрощают связь с последовательными портами.
Содержание
О пакете PySerial
Python на компьютере с установленным пакетом PySerial может взаимодействовать с внешним оборудованием. Это полезный пакет для решения проблем, поскольку он облегчает обмен данными между компьютерами и внешним оборудованием, таким как вольтметры, расходомеры, фонари и другие устройства, которые отправляют информацию через порты.
Это полезный пакет для решения проблем, поскольку он облегчает обмен данными между компьютерами и внешним оборудованием, таким как вольтметры, расходомеры, фонари и другие устройства, которые отправляют информацию через порты.
Установка модуля
Пакет PySerial НЕ является частью стандартной библиотеки Python. Поэтому устанавливайте вручную. Пакет Anaconda Distribution of Python поставляется с предустановленным пакетом.
Установка PIP Команда
$ pip install pyserial Команда подсказки Anaconda
> conda install pyserial Импорт модуля + проверка установки
После установки версию можно проверить с помощью следующей команды.
импортный серийный номер печать (серийная версия)
О функции
serial.read()
Аргументы — Передайте целочисленное значение, чтобы указать количество возвращаемых байтов.
Возвращает — Предоставляет нам количество указанных байтов
Использование функции последовательного чтения Python для извлечения информации из последовательных портов
Последовательное чтение Python — важная функция модуля. Это позволяет нам разгребать информацию, которая предоставляется из портов. Вот реализация Python, которая поможет нам в этом.
с serial.Serial('/my/sample1', 3443, timeout=1) как серийный номер:
readOneByte = серийный.read()
readTenByte = серийный.чтение(10)
Объяснение
По умолчанию .read() считывает по одному байту за раз. Предоставляя целочисленное значение, вы можете указать, сколько байтов информации должно быть прочитано функцией. Python Serial Read vs Readline
Serial.Read () | Serial.Readline () | 9000. | 9000. | . | серийный.readline() вернет все байты, пока не достигнет EOL. |
|---|---|
| Если внутри функции указано целое число, оно вернет столько байтов. Пример: serial.read(20) Возвращает 20 байт. | Вместо использования serial.read() в итерациях можно использовать serial.readline() . |

В тренде:
Полное руководство по Python __all__
Использование последовательного чтения и записи на Raspberry Pi
Убедитесь, что ваш Raspberry Pi обновлен, выполнив следующие команды:
sudo apt update sudo apt upgrade
Чтение данных
ser = serial.Serial(
# Последовательный порт для чтения данных
порт='/dev/ttyUSB0',
# Скорость, с которой информация передается в канал связи
скорость = 9600,
# Применение проверки четности (в данном случае нет)
четность=serial. PARITY_NONE,
# Шаблон битов для чтения
стопбиты=серийный.STOPBITS_ONE,
# Общее количество битов для чтения
размер байта = серийный номер.ВОСЕМЬБИТ,
# Количество последовательных команд, которые нужно принять до истечения времени ожидания
таймаут=1
)
# Приостановить работу программы на 1 секунду, чтобы не перегрузить последовательный порт
пока 1:
х=ser.readline()
распечатать х
PARITY_NONE,
# Шаблон битов для чтения
стопбиты=серийный.STOPBITS_ONE,
# Общее количество битов для чтения
размер байта = серийный номер.ВОСЕМЬБИТ,
# Количество последовательных команд, которые нужно принять до истечения времени ожидания
таймаут=1
)
# Приостановить работу программы на 1 секунду, чтобы не перегрузить последовательный порт
пока 1:
х=ser.readline()
распечатать х
Запись данных
время импорта
серийный номер импорта
ser = серийный номер.Серийный(
# Последовательный порт для чтения данных
порт='/dev/ttyUSB0',
# Скорость, с которой информация передается в канал связи
скорость = 9600,
# Применение проверки четности (в данном случае нет)
четность=serial.PARITY_NONE,
# Шаблон битов для чтения
стопбиты=серийный.STOPBITS_ONE,
# Общее количество битов для чтения
размер байта = серийный номер.ВОСЕМЬБИТ,
# Количество последовательных команд, которые нужно принять до истечения времени ожидания
таймаут=1
)
счетчик=0
# Указывает номер текущего счетчика для каждой написанной строки
# Делает паузу на одну секунду на каждой итерации, чтобы не перегрузить порт
пока 1:
ser. write("Счетчик записи: %d \n"%(счетчик))
время сна(1)
счетчик += 1
write("Счетчик записи: %d \n"%(счетчик))
время сна(1)
счетчик += 1
Python Serial Read in Hex Format
С помощью функции .hex() мы сохраняем байтовые данные в шестнадцатеричном формате в переменной hexData
import serial
ser = серийный номер.Серийный(
порт='/samplePort/ttyUSB1',
скорость = 115200,
четность=serial.PARITY_NONE,
стопбиты=серийный.STOPBITS_ONE,
размер байта = серийный номер.ВОСЕМЬБИТ,
тайм-аут = Нет
)
пока 1:
напечатать ser.read()
hexData= ser.read().hex()
распечатать шестнадцатеричные данные
Все о Python SortedDict
Функция Python pySerial in_waiting
Эту функцию можно использовать для получения количества байтов во входном буфере .
Возврат(ы) – Целое число
Аргументы – Нет
Функция out_waiting() работает аналогично. Он предоставляет количество байтов в выходном буфере.
Вот пример программы, реализующей указанную функцию.
импортный серийный номер
ser = серийный номер.Серийный(
порт = '/samplePort/myUSB',
скорость = 5000,
четность = серийный номер.PARITY_NONE,
стоп-биты = серийный номер.STOPBITS_ONE,
размер байта = серийный номер.ВОСЕМЬ БИТ,
время ожидания = 0,5,
inter_byte_timeout = 0,1
)
# Читает один байт информации
myBytes = ser.read(1)
# Проверяет наличие дополнительных байтов во входном буфере
bufferBytes = ser.inWaiting()
# Если существует, то добавляется в переменную myBytes с ранее прочитанной информацией
если буферные байты:
myBytes = myBytes + ser.read (bufferBytes)
печать (мои байты)
Функция Python pySerial flush()
flush() удаляет содержимое внутреннего буфера файлового объекта. Он не принимает никаких аргументов и ничего не возвращает. Существует 2 типа функций сброса:
-
flushInput()— очищает входной буфер -
flushOutput()— очищает выходной буфер
import serial ser = serial.Serial('/samplePort/myUSB10') # Очистка входного буфера ser.flushInput() # Очистка выходного буфера ser.flushOutput() ser.write("получить") # Пауза на 100 миллисекунд спать (.1) напечатать ser.read()
Чтение данных с плат Arduino с помощью Python Serial Read
Arduino — это электронная платформа с открытым исходным кодом, которая предоставляет простое в использовании аппаратное и программное обеспечение. Платы Arduino могут считывать входные данные с датчиков, нажатия пальцем на кнопку или сообщения в Твиттере, которые затем выводятся в виде моторов, светодиодов или даже текста.
импортный серийный номер
время импорта
ser = serial.Serial('COM4', 9800, таймаут=1)
время сна(2)
для я в диапазоне (50):
# Чтение всех байтов доступных байтов до EOL
строка = ser.readline()
если строка:
# Преобразование строк байтов в строки юникода
строка = строка.decode()
# Преобразование строки Unicode в целое число
число = целое (строка)
печать (число)
сер. закрыть()
закрыть()
Популярные сейчас
[Fixed] ModulenotFounderror: No Модуль с именем PycoCotools
Общие ошибки
Python
ATTRIB UTE Ошибка 'MODULE' MODULE . ваш файл проекта в «serial.py». Удалите serial.pyc , если он существует. После этого запустите , импортируйте серийный номер . Кроме того, эта проблема возникает из-за того, что имя импортируемого пакета совпадает с именем файла проекта.
Часто задаваемые вопросы о последовательном чтении Python
Можем ли мы читать несколько байтов за раз при последовательном чтении?
Функция .read() получает только один байт за раз. Однако мы можем итерировать функцию для получения одного байта за раз в нескольких циклах. Это довольно избыточно. .readline() будет считывать полный набор байтов, пока не будет достигнут EOL.