Что такое шаговый двигатель. Какие бывают типы шаговых двигателей. Как работают шаговые двигатели. Где применяются шаговые двигатели. Каковы преимущества и недостатки шаговых двигателей.
Что такое шаговый двигатель и как он устроен
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Ротор такого двигателя поворачивается на фиксированный угол (шаг) при подаче каждого управляющего импульса.
Основные компоненты шагового двигателя:
- Статор — неподвижная часть с обмотками
- Ротор — вращающаяся часть (может быть с постоянными магнитами или зубчатой конструкции)
- Подшипники
- Корпус
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора. При подаче тока на обмотки статора создается магнитное поле, которое взаимодействует с полем ротора, вызывая его поворот.
Типы шаговых двигателей
Существует несколько основных типов шаговых двигателей:
1. С постоянными магнитами
Ротор выполнен в виде цилиндра с постоянными магнитами. Обеспечивает большой крутящий момент, но имеет сравнительно большой шаг (обычно 7.5-15°).
2. Реактивный (с переменным магнитным сопротивлением)
Ротор выполнен из магнитомягкого материала в виде зубчатого колеса. Имеет малый шаг (1.8-5°), но небольшой крутящий момент.
3. Гибридный
Сочетает особенности двух предыдущих типов. Ротор содержит постоянный магнит и имеет зубчатую структуру. Обеспечивает малый шаг (обычно 0.9-1.8°) и высокий момент.
Принцип работы шагового двигателя
Работа шагового двигателя основана на последовательном переключении обмоток статора. При этом происходит следующее:
- На обмотки статора подаются импульсы тока в определенной последовательности
- Создается вращающееся магнитное поле статора
- Ротор стремится занять положение с минимумом энергии, ориентируясь по полю статора
- Происходит поворот ротора на один шаг
- Процесс повторяется, обеспечивая вращение
Угол поворота ротора зависит от количества обмоток статора и конструкции ротора. Чем больше полюсов, тем меньше угол шага.

Режимы работы шаговых двигателей
Шаговые двигатели могут работать в нескольких режимах:
1. Полношаговый режим
В этом режиме ротор поворачивается на полный шаг за один такт управления. Обеспечивает максимальный крутящий момент.
2. Полушаговый режим
Ротор поворачивается на половину шага за такт. Позволяет увеличить точность позиционирования, но снижает момент.
3. Микрошаговый режим
Деление шага на более мелкие доли (1/4, 1/8, 1/16 и т.д.). Обеспечивает высокую плавность вращения, но значительно снижает момент.
Области применения шаговых двигателей
Шаговые двигатели широко используются в различных сферах:
- 3D-принтеры и ЧПУ-станки
- Робототехника
- Автомобильная электроника (регулировка зеркал, фар)
- Офисная техника (принтеры, сканеры)
- Медицинское оборудование
- Системы позиционирования антенн и телескопов
- Промышленная автоматизация
Преимущества и недостатки шаговых двигателей
Шаговые двигатели имеют ряд достоинств и ограничений:
Преимущества:
- Высокая точность позиционирования
- Возможность точного управления скоростью
- Высокий крутящий момент на низких оборотах
- Отсутствие эффекта накопления ошибки
- Возможность мгновенного старта/остановки/реверса
Недостатки:
- Возможность пропуска шагов при перегрузке
- Сложность работы на высоких скоростях
- Повышенное энергопотребление в режиме удержания позиции
- Возможность возникновения резонансных явлений
Управление шаговыми двигателями
Для управления шаговыми двигателями используются специальные драйверы. Основные функции драйвера:
- Формирование необходимой последовательности импульсов
- Регулировка тока в обмотках
- Выбор режима работы (полный шаг, полушаг, микрошаг)
- Защита двигателя от перегрузок
Современные драйверы позволяют реализовать сложные алгоритмы управления, обеспечивая плавность хода и высокую эффективность работы шаговых двигателей.
Выбор шагового двигателя для конкретной задачи
При выборе шагового двигателя необходимо учитывать следующие параметры:
- Требуемый крутящий момент
- Необходимая точность позиционирования
- Скорость вращения
- Габаритные размеры и вес
- Условия эксплуатации (температура, влажность)
- Совместимость с системой управления
Правильный выбор двигателя и драйвера позволяет создать эффективную систему позиционирования для широкого спектра задач.
Перспективы развития шаговых двигателей
Несмотря на то, что принцип работы шаговых двигателей остается неизменным, технологии их производства и управления постоянно совершенствуются. Основные направления развития:
- Улучшение характеристик магнитных материалов
- Совершенствование конструкции для повышения КПД
- Разработка более эффективных алгоритмов управления
- Интеграция датчиков положения для реализации замкнутых систем управления
- Миниатюризация для применения в микроэлектромеханических системах (MEMS)
Эти инновации позволят расширить сферу применения шаговых двигателей и повысить их конкурентоспособность по сравнению с другими типами электроприводов.

Шаговый двигатель
Дмитрий Левкин
- Конструкция
- Характеристики
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
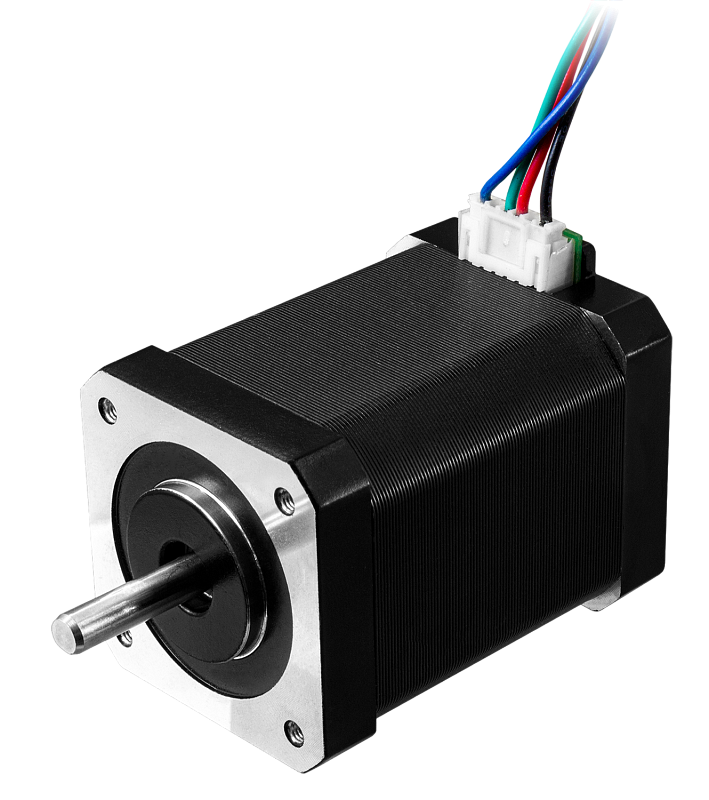
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.

Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.

Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями.
 Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага; - полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
Библиографический список
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением.
 Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.) - Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода.
 Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах. - Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.

- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.

- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Драйверы делятся на две категории:
- Повторяющие форму сигналов.
 Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298. - Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
. Множество размеров и версий мощности.
Шаговые двигатели с обратной связью как альтернатива двигателям BLDC
Технология шаговых двигателей долгое время считалась экономичной альтернативой приложениям, не требующим высокой производительности, обеспечиваемой серводвигателями. Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Эта тенденция была остановлена и даже обращена вспять в последние годы благодаря разработке управляемых шаговых двигателей с обратной связью. Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
В сочетании с более выгодной ценой системы шаговых двигателей, шаговые двигатели с обратной связью являются экономичной альтернативой сервосистемам. Тем не менее, системам с обратной связью не всегда удавалось вытеснить системы с обратной связью в традиционных приложениях с шаговыми двигателями, таких как автоматизация лабораторий или небольшие фрезерные станки с ЧПУ. Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Виртуальный энкодер заменяет реальный энкодер
Чтобы воспользоваться преимуществами ориентированного на поле управления в этих приложениях, Nanotec разработала безсенсорное, т.е. без энкодера, управление шаговыми двигателями, в котором фактическое положение а скорость ротора определяется «виртуальным энкодером» в контроллере.
Системы без датчиков уже много лет используются в двигателях BLDC, особенно в вентиляторах и насосах, не требующих управления положением. Во всех бессенсорных системах используется физический эффект, заключающийся в том, что двигатель индуцирует противодействующее напряжение (противоЭДС) во время работы, которое пропорционально скорости.
Простейший безсенсорный контроль заключается в прямом измерении противо-ЭДС, когда катушка обесточена в цикле коммутации. Однако по сравнению со стандартной активацией этот метод требует специального оборудования и стабилен только прибл. 10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях.
10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Все двигатели Plug & Drive от Nanotec реализуют управление, ориентированное на поле (замкнутый контур). BLDC и шаговые двигатели контролируются по полю в зависимости от нагрузки и отличаются только рабочими точками из-за разного количества полюсов. Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Без потерь на шаг, без резонансов
Критически важным фактором для качества контроллера на основе наблюдателя является хорошая модель используемого двигателя, как с точки зрения математических формул, так и с точки зрения констант двигателя подключенного двигателя.
Таким образом, перед нами стояла задача найти достаточно точную математическую модель двигателя, которую можно было бы полностью рассчитать в каждом цикле управления даже в небольшом микропроцессоре. В принципе, шаговые двигатели математически аналогичны двигателям BLDC, но имеют только две фазы вместо обычных трех фаз BLDC, а также демонстрируют некоторые особенности в модели на более высоких скоростях из-за большего количества полюсов.
Другим важным аспектом практического использования бездатчикового контроллера является идентификация параметров модели. Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Бессенсорная система от Nanotec, напротив, работает с очень небольшим количеством параметров, которые на самом деле не обязательно знать пользователю: процедура автоматической настройки измеряет подключенный двигатель и автоматически определяет все необходимые параметры.
В зависимости от типа двигателя информация о скорости и положении поступает в диапазоне от 100 до 250 об/мин. Эта информация столь же точна, как и у оптического энкодера с шагом 500 или 1000. Результирующее управление двигателем имеет такое же качество и крутящий момент, как и управление двигателем с помощью энкодера. Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Напротив, на высоких скоростях безсенсорная система работает лучше, чем поворотный энкодер, который всегда демонстрирует допуск на биение, что приводит к синусоидальной угловой ошибке. В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и ошибка угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и ошибка угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
Управление на основе наблюдателя делает ненужным использование двигателей с очень высокой противо-ЭДС, но недостатком которых является высокая индуктивность и, следовательно, более низкая динамика. Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Сочетание разомкнутого и замкнутого контура
Бездатчиковое управление особенно удобно для шаговых двигателей, поскольку его можно использовать не только для управления скоростью, но и для позиционирования в сочетании с управлением без обратной связи. Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку в режиме разомкнутого контура на низких скоростях обычно проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.
Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку в режиме разомкнутого контура на низких скоростях обычно проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулированием скорости
Информация о продукте Решения Техническая информация Размер двигателя Загрузки Виртуальный выставочный зал Свяжитесь с нами
αSTEP Шаговые двигатели Бесщеточные двигатели постоянного тока Серводвигатели Редукторные двигатели переменного тока Линейные приводы Поворотные приводы Сетевые продукты Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Принять условия.
Шаговые двигатели
Шаговые двигатели обеспечивают простое точное позиционирование. Они используются в различных типах оборудования для точного регулирования угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели с компактным корпусом генерируют высокий крутящий момент и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также удерживают свое положение при остановке благодаря своей механической конструкции. Решения для шаговых двигателей состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Компания Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей с входом переменного или постоянного тока
- Размеры корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее. ..
..
- Шаговые двигатели (только двигатель) Драйверы шаговых двигателей
- Шаговые двигатели с регулированием скорости
- Контроллеры
Шаговые двигатели (только двигатель)
Компания Oriental Motor предлагает широкий ассортимент шаговых двигателей, в том числе; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны с размерами корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- Шаговые двигатели 0,79–3,54 дюйма (20–90 мм) NEMA 8–NEMA 34 типоразмера корпуса
- Доступны беззазорные, малозазорные и прямозубые шестерни
- Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
- αSTEP Шаговые двигатели с замкнутым контуром
- 2-фазные шаговые двигатели
- 5-фазные шаговые двигатели
Драйверы шаговых двигателей
Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Шаговые двигатели с замкнутым контуром AlphaStep, драйверы двухфазных или пятифазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet/IP™, EtherCAT, PROFINET Совместимые версии
- Плата или коробка Тип
- αSTEP Драйверы с обратной связью
- 2-фазные драйверы
- 5-фазные драйверы
EtherNet/IP™ является товарным знаком ODVA
Шаговые двигатели и драйверы для управления скоростью
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера. Рабочая скорость, время разгона и торможения, рабочий ток могут быть установлены с помощью переключателей драйвера, а простое переключение входа FWD (RVS) в положение ON или OFF обеспечивает простоту управления.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры/сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного ввода
- Сетевые преобразователи/шлюзы (связь RS-485)
- EtherCat
- CC-Link
- МЕХАТРОЛИНК
- Контроллеры
- Сетевые шлюзы
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальных вибрациях идеально подходят для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Точное позиционирование с точным шагом
Шаговый двигатель вращается с фиксированным шагом, как секундная стрелка часов. Этот угол называется «базовым углом шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36°, 0,72°, 0,9° и 1,8°. 5-фазные шаговые двигатели имеют угол шага 0,36° и 0,72°, а 2-фазные шаговые двигатели имеют угол шага 0,9° и 1,8°.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс. Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Ниже показана конфигурация системы для высокоточного позиционирования. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого постоянно меняется между ON и OFF. Каждый цикл ВКЛ/ВЫКЛ считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя провернуться на один шаг. Уровни сигналов, соответствующие состояниям ВКЛ и ВЫКЛ напряжения, обозначены как «H» и «L» соответственно.
Количество оборотов пропорционально количеству импульсов
Количество оборотов шагового двигателя пропорционально количеству импульсных сигналов (число импульсов), подаваемых драйверу. Соотношение вращения шагового двигателя (угла поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоте импульсов), подаваемых на драйвер. Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Создание высокого крутящего момента в компактном корпусе
Шаговые двигатели генерируют высокий крутящий момент в компактном корпусе. Эти особенности обеспечивают превосходное ускорение и реакцию, что, в свою очередь, делает эти двигатели подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживает себя в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя. Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания момент самоудержания двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для максимального использования возможностей шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выдавать сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Узнайте больше о наших продуктах AlphaStep
Типы операционных систем
Каждый шаговый двигатель и драйвер сочетают в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные вводятся в генератор импульсов заранее. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит рабочую команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем с помощью непосредственно подключенного персонального компьютера или программируемого контроллера. Так как не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают проводку.
Разница между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока к двигателю подается 24 В постоянного тока. В двигателях и приводных системах на 100–115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока (некоторые продукты являются исключением из этого правила).
