Что такое шаговый двигатель и как он работает. Какие бывают типы шаговых двигателей. Как устроены шаговые двигатели разных типов. Где применяются шаговые двигатели. Каковы преимущества и недостатки шаговых двигателей.
Что такое шаговый двигатель и принцип его работы
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Его ротор поворачивается на фиксированный угол (шаг) при подаче одного импульса на обмотки статора.
Основные компоненты шагового двигателя:
- Статор с обмотками (фазами)
- Ротор с постоянными магнитами или зубчатой структурой
- Вал
- Корпус
Принцип работы заключается в следующем:
- На обмотки статора подаются импульсы тока в определенной последовательности
- Это создает вращающееся магнитное поле
- Ротор поворачивается, стремясь занять положение с минимальным магнитным сопротивлением
- За один импульс ротор поворачивается на фиксированный угол — шаг
Точность позиционирования определяется количеством шагов на оборот. Типичные значения — от 200 до 400 шагов на оборот.

Основные типы шаговых двигателей
Существует несколько основных типов шаговых двигателей:
1. С переменным магнитным сопротивлением
Особенности:
- Ротор из магнитомягкого материала с зубчатой структурой
- Статор с обмотками образует электромагниты
- Простая конструкция
- Низкая стоимость
- Небольшой крутящий момент
2. С постоянными магнитами
Характеристики:
- Ротор с постоянными магнитами
- Выше крутящий момент, чем у двигателей с переменным магнитным сопротивлением
- Меньшее количество шагов на оборот (обычно 24-48)
3. Гибридные
Особенности гибридных шаговых двигателей:
- Сочетают элементы двух предыдущих типов
- Ротор с постоянными магнитами и зубчатой структурой
- Высокая точность позиционирования (до 400 шагов на оборот)
- Высокий крутящий момент
- Наиболее распространенный тип в современной технике
Конструкция и подключение шаговых двигателей
По способу подключения обмоток различают следующие типы шаговых двигателей:
Биполярные
Особенности биполярных шаговых двигателей:
- Две обмотки (фазы)
- 4 вывода для подключения
- Требуют сложную схему управления (драйвер с H-мостом)
- Обеспечивают высокий крутящий момент
Униполярные
Характеристики униполярных шаговых двигателей:

- Четыре обмотки или две обмотки с отводами от середины
- 5-6 выводов для подключения
- Более простая схема управления
- Меньший крутящий момент, чем у биполярных
Как определить тип шагового двигателя?
Тип шагового двигателя можно определить по количеству выводов:
- 4 вывода — биполярный
- 5 выводов — униполярный
- 6 выводов — униполярный или биполярный
- 8 выводов — универсальный, может быть подключен как биполярный или униполярный
Управление шаговыми двигателями
Для управления шаговыми двигателями используются специальные драйверы. Основные функции драйвера:
- Коммутация обмоток в нужной последовательности
- Формирование необходимой формы тока в обмотках
- Защита двигателя от перегрузок
Существует несколько режимов управления шаговыми двигателями:
Полношаговый режим
В этом режиме ротор перемещается на один полный шаг за один такт управления. Обеспечивает максимальный крутящий момент.
Полушаговый режим
Ротор перемещается на половину шага за такт. Позволяет увеличить точность позиционирования, но снижает крутящий момент.
Микрошаговый режим
Обеспечивает перемещение ротора на доли шага (до 1/256). Значительно повышает плавность вращения и точность, но существенно снижает момент.
Применение шаговых двигателей
Шаговые двигатели широко применяются в различных областях техники:
- Станки с ЧПУ
- 3D-принтеры
- Робототехника
- Системы позиционирования
- Офисная техника (принтеры, сканеры)
- Автомобильная электроника
- Медицинское оборудование
Основные преимущества, обуславливающие широкое применение шаговых двигателей:
- Высокая точность позиционирования
- Возможность точного управления скоростью вращения
- Быстрый старт/остановка/реверс
- Высокая надежность (отсутствие коллектора)
- Большой крутящий момент на низких оборотах
Преимущества и недостатки шаговых двигателей
Как и любое техническое решение, шаговые двигатели имеют свои плюсы и минусы:
Преимущества:
- Высокая точность позиционирования без обратной связи
- Стабильность на низких скоростях вращения
- Возможность быстрого старта/остановки/реверса
- Высокая надежность из-за отсутствия щеток
- Однозначная зависимость положения от входных импульсов
Недостатки:
- Возможность пропуска шагов при перегрузке
- Сложная схема управления
- Явление резонанса на определенных скоростях
- Относительно невысокая удельная мощность
- Высокое энергопотребление даже без нагрузки
Выбор шагового двигателя
При выборе шагового двигателя необходимо учитывать следующие параметры:

- Требуемый крутящий момент
- Необходимая точность позиционирования
- Скорость вращения
- Габариты и масса
- Напряжение питания
- Тип подключения (биполярный/униполярный)
Важно также правильно подобрать драйвер, совместимый с выбранным двигателем по электрическим параметрам и способу управления.
Заключение
Шаговые двигатели являются важным элементом современных систем автоматизации и робототехники. Их уникальные свойства позволяют решать задачи точного позиционирования и управления скоростью в широком диапазоне применений. Правильный выбор типа двигателя и схемы управления позволяет максимально эффективно использовать преимущества шаговых двигателей в конкретных приложениях.
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель — это электромеханичское
устройство, которое преобразует электрические импульсы в дискретные
механические перемещения. Так, пожалуй, можно дать строгое определение.
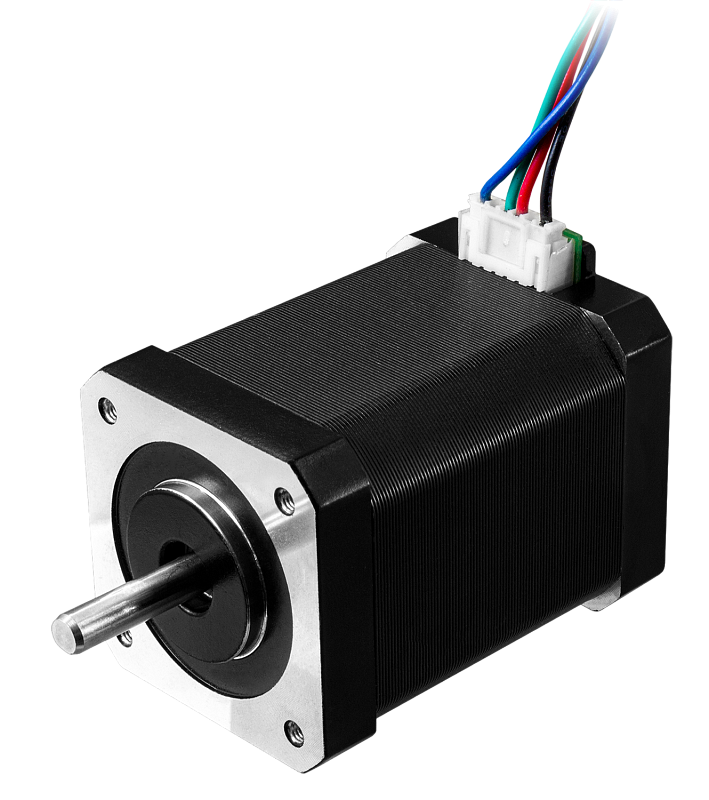
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он
практически ничем не отличается от двигателей других типов. Чаще всего это
круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.
 Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу
- возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
 Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу
Но не все так хорошо…
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных
двигателей постоянного тока. Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является
возможность осуществлять точное позиционирование и регулировку скорости
без датчика обратной связи. Это очень важно, так как такие датчики могут
стоить намного больше самого двигателя.
При проектировании конкретных систем приходится делать
выбор между сервомотором и шаговым двигателем. Когда требуется
прецизионное позиционирование и точное управление скоростью, а требуемый
момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для
повышения момента может быть использован понижающий редуктор. Однако для
шаговых двигателей редуктор не всегда подходит.
Возможность получения низкой частоты вращения часто
является причиной того, что разработчики, будучи не в состоянии
спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В
то же время коллекторный двигатель имеет более высокую удельную мощность,
низкую стоимость, простую схему управления, и вместе с одноступенчатым
червячным редуктором он способен обеспечить тот же диапазон скоростей, что
и шаговый двигатель. К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
| Применение шаговых двигателей Биполярные и униполярные шаговые двигатели Шаговые двигатели с постоянными магнитами Гибридные шаговые двигатели |
Виды шаговых двигателей Управление фазами шаговых двигателей Двигатели с переменным магнитным сопротивлением |
Шаговый двигатель для ЧПУ — ООО «СЗЭМО Электродвигатель»
Шаговые электродвигатели (ШД) используются там, где нужно позиционирование повышенной точности.
Что такое шаговый двигатель? Это синхронный двигатель без щеток, имеющий несколько обмоток. Для фиксации ротора в определенной позиции ток подается в одну из обмоток статора. По поступлении тока в другую обмотку ротор меняет позицию. Это и есть «шаг».
Типы ШД и их устройство
- С переменным магнитным сопротивлением. На статичной части таких ШД есть несколько полюсов. Ротор – зубчатой формы из мягкого материала, ненамагниченный. Если, к примеру, статор 6-полюсный, а ротор из 4 зубцов, то независимых обмоток на двух противоположных статорных полюсах будет 3. Шаг мотора будет равен 30°.
- С постоянными магнитами в роторе. Прямолинейные полюсы параллельны оси двигателя. Поскольку магнитный поток мощнее, крутящий момент на порядок выше, чем в ШД первого типа. Шаг такого мотора – от 7,5 до 15°.Может быть от 24 до 48 шагов на оборот.
- Гибридные ШД (ГШД). Установка зубцов в направлении оси сокращает величину шага. Крутящий момент и скорость возрастают.
 Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
ШД по типу обмоток подразделяются на:
- Биполярные с одной обмоткой для каждой фазы. Переплюсовка драйвером изменяет направление магнитного поля.
- Униполярные. В каждой фазе одна обмотка, но из середины каждой обмотки имеется отвод. Направление поля меняется за счет переключения используемой половины обмотки. Драйвер имеет только 4 ключа.
Характеристики ШД
- Крутящий момент. Его измеряют в кг-сила-см. Чем выше показатель зависимости вращательного момента от частоты вращения, тем быстрее ШД набирает обороты после включения.
- Удерживающий момент или сила блокирования ротора статором при включенном, но не запущенном моторе.
 Его измеряют в унциях-на-дюйм.
Его измеряют в унциях-на-дюйм. - Тормозящий или стопорный момент, т.е. сила, которая удерживает ротор от вращения без подачи тока. В ГШД эта величина в 10 раз меньше величины силы удерживания ротора от вращения при полной подаче тока. Измеряется в унциях-на-дюйм.
- Номинальное напряжение, зависящее от индуктивности обмоток. Указывается в вольтах. По нему определяют оптимальное напряжение для подачи в мотор. Наилучшее напряжение превышает номинальное. Превышение силы подаваемого тока ведет к перегреву и поломке двигателя. При недостаточном напряжении он не запустится. Оптимальную силу тока определяют по формуле U = 32 x√ L. L – индуктивность обмотки, а U – искомое значение.
- Диэлектрические испытания. По максимальному напряжению, которое выдерживает обмотка в течение определенного времени, определяют сопротивление мотора перегрузкам.
- Момент инерции ротора – это скорость разгона ШД, которую измеряют в грамм-квадратных см.
- Число полных шагов за оборот.
 Чем оно больше, тем мощнее и быстрее мотор.
Чем оно больше, тем мощнее и быстрее мотор. - Длина корпуса без учета вала и общая масса или вес изделия. По габаритам и массе определяют, когда нужен компактный двигатель, а когда – крупнее и мощнее.
К примеру, в ШД PL57h51 PL57 – ширина-высота (диаметр) по квадратному фланцу 57 мм, h51 – длина двигателя без вала, равная 41 мм. Диаметр двигателя влияет на все его моменты больше, чем длина.
Инкодеры, драйверы и подключение
Специальные драйверы подключают к компьютерному LTP-порту и посредством их управляют ШД. Драйвер – это практически блок управления ШД. В шаговых двигателях для ЧПУ к драйверу присоединяют 4 вывода ШД и управляющие провода с контроллера ЧПУ, и плюс и минус с блока питания. Поступая в драйвер, сигналы контроллера управляют переключением ключей силовой схемы питающего напряжения. Через эти ключи питающее напряжение идет на двигатель.
Максимальный выдаваемый на выводы для обмоток мотора ток нужного напряжения – основной критерий подбора драйвера. Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
В двигателе может быть от 4 до 6 проводов, и от их количества зависит порядок подключения ШД. Биполярные механизмы сочетаются только с 4-проводными двигателями.
На каждые 2 обмотки приходится 2 провода. Самые мощные 6-проводные моторы могут подключаться и к биполярным, и к униполярным устройствам, и в них на каждую обмотку приходится средний провод или центр-кран и 2 провода. В униполярных моторах на каждую обмотку приходятся 3 провода. Два из них подсоединяют к транзисторам, а центр-кран – к источнику питания.
В 5-проводных ШД центральные провода вместе с остальными входят в общий кабель. Предпочтительно найти средний провод и соединить его с другими проводниками.
Датчики, подающие сигналы программному обеспечению, называют энкодерами и часто применяют с ШД. Энкодер нужен, когда налицо нелинейная зависимость от количества шагов.
Области использования, достоинства и недостатки
Шаговые двигатели для ЧПУ широко применяются в координатных столах и системах автоматизации. Панелям управления, программирования и станкам с ЧПУ не обойтись без ШД.
ШД – достойная альтернатива серводвигателю, поскольку, в отличие от него:
- Хорошо работает при весьма разнообразных нагрузках.
- Имеет постоянный угол поворота и стандартизированные габариты.
- Имеет низкую стоимость.
- Прост в монтаже и эксплуатации, долговечен и надежен.
- Пропуская шаги, не сгорает при крайне высоких оборотах.
Тем не менее, ШД уступает серводвигателю в том, что:
- У него мал КПД и велико энергопотребление.
- Увеличение частоты оборотов резко снижает крутящий момент.
- Мощность слишком мала для таких габаритов и веса.
- Велик нагрев двигателя при работе.
- Мотор слишком шумит на высокой и средней частотах.
Управление шаговым двигателем | Все о шаговых двигателях
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Шаг во времени, шаг во времени
Давай, друзья, шаг во времени
Шаг во времени
Шаг во времени, шаг во времени
Шаг во времени, шаг во времени
2 Никогда не нужна причина, никогда не нужна рифма
Мы шагаем во времени, мы шагаем во времени
«Шаг во времени»
Роберт Б. Шерман и Ричард М. Шерман
Управление шаговым двигателем немного сложнее управления обычным щеточным двигателем постоянного тока. Шаговым двигателям требуется шаговый контроллер для включения фаз в своевременной последовательности, чтобы двигатель вращался.
Простейший тип драйвера можно собрать из нескольких транзисторов. Они просто последовательно включаются и выключаются, чтобы подавать питание на фазы и двигать двигатель.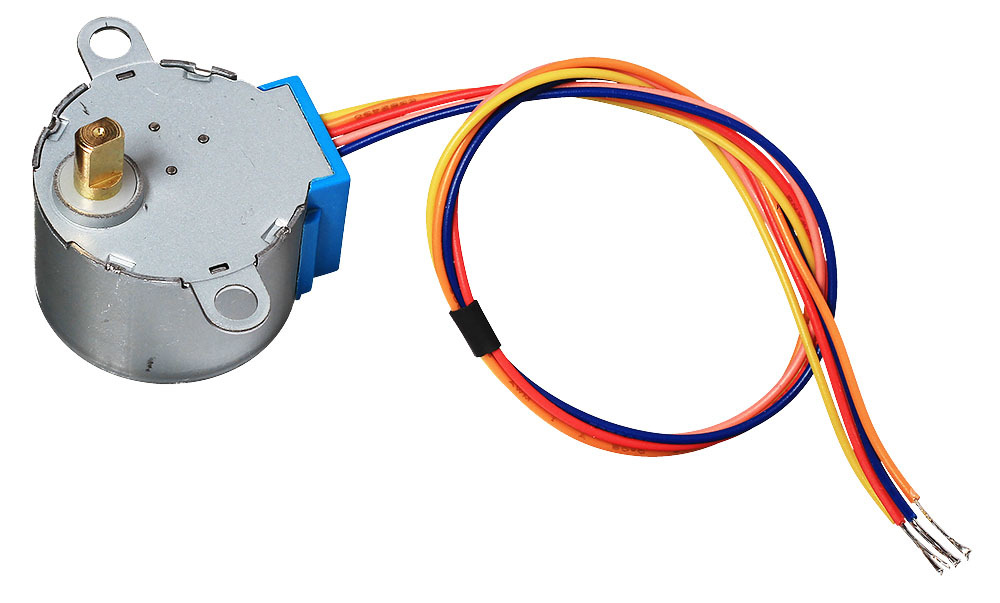 Униполярные драйверы относительно недороги в изготовлении, но работают только с униполярными двигателями. На сайте Arduino есть отличное руководство по его сборке.
Униполярные драйверы относительно недороги в изготовлении, но работают только с униполярными двигателями. На сайте Arduino есть отличное руководство по его сборке.
Учебное пособие по униполярному шаговому приводу
Для управления биполярным двигателем требуется 2 полных Н-моста, чтобы он мог реверсировать ток в фазах. Н-мосты сложно построить с нуля. Но для упрощения задачи доступно множество чипов H-bridge.
L293D — один из самых популярных и экономичных чипов. Их можно найти в основе большинства моторных щитов первого поколения, в том числе невероятно популярного V1 Adafruit Motor Shield.
Есть отличный туториал по использованию голого L293D с Arduino в системе обучения Adafruit:
Урок 16 — Шаговые двигатели
Adafruit Motor Shield V2 — это большой шаг вперед по сравнению с базовыми контроллерами на базе L293D. Экран V2 использует два драйвера MOSFET TB6612. По сравнению с L293D, TB6612 обеспечивает удвоенную пропускную способность по току и значительно меньшее падение напряжения, что позволяет более эффективно управлять шаговыми двигателями.
Всего с 2 микросхемами драйверов и 4 полными H-мостами каждый шилд может управлять двумя шаговыми двигателями. Чипы драйверов взаимодействуют через специальный чип драйвера ШИМ с интерфейсом I2C. Это освобождает множество контактов GPIO для других целей, а также делает экран штабелируемым. Вы можете сложить до 32 из них для управления 64 двигателями всего с 2 контактами ввода-вывода!
Информацию об этом гонщике можно найти в системе обучения.
Направляющая Adafruit Motor Shield V2
Платы контроллеров ЧПУ gShield и TinyG делают вас на шаг ближе к шаговым двигателям промышленного уровня. Эти платы оснащены драйверами «прерывателя» постоянного тока, которые можно настроить для обеспечения максимального крутящего момента и скорости от ваших двигателей.
ЧПУ TinyG имеет встроенный интерпретатор G-кода и 4 выхода двигателя, что делает его полным встроенным решением для 4-осевого станка с ЧПУ малого и среднего размера.
Как и следовало ожидать, эти усовершенствованные высокопроизводительные платы более сложны в работе и рекомендуются для опытных пользователей.
Подробности об этих платах и их работе можно найти в TinyG Wiki и на форумах Synthetos.
Форумы Synthetos
Tiny G Wiki
Типы шаговых двигателей Сопоставление драйвера с шаговым двигателем
Это руководство было впервые опубликовано 05 мая 2014 г. Оно было последним обновлено 05 мая 2014 г.
Эта страница (Управление шаговым двигателем) последний раз обновлялась 12 ноября 2022 г.
Текстовый редактор на базе tinymce.
типов степперов | Все о шаговых двигателях
Типы степперов
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Существует множество типов шаговых двигателей, некоторые
из которых требуют очень специализированных водителей.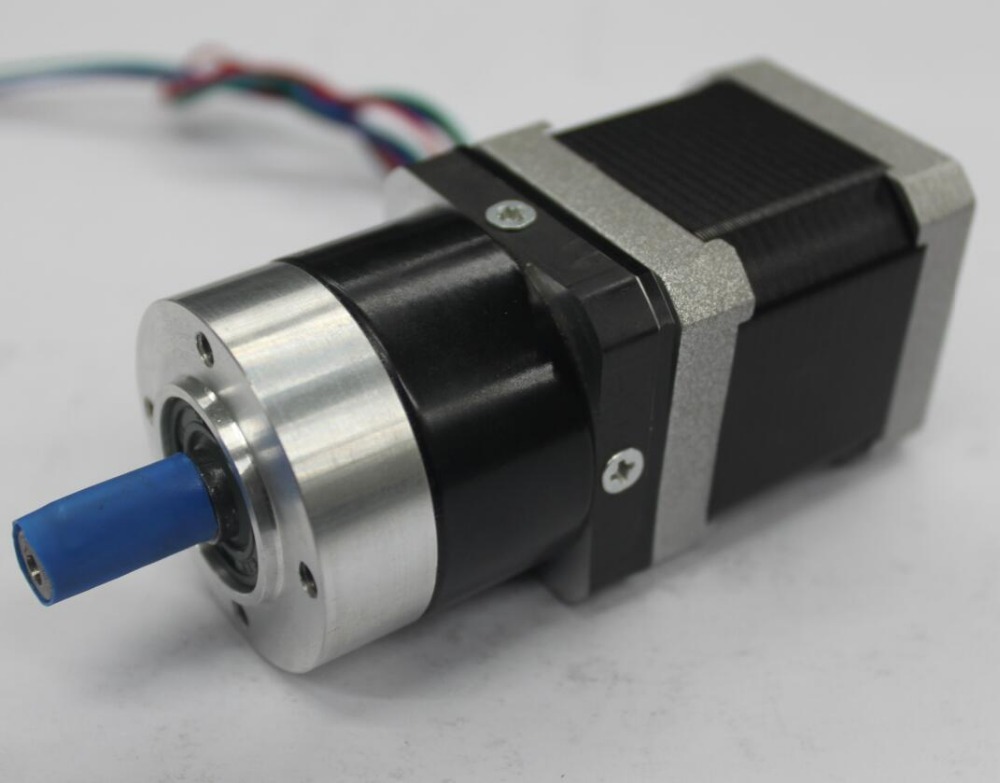 Для наших целей мы сосредоточимся на шаговых двигателях, которые можно
управляется общедоступными драйверами.
Это: шаговые двигатели с постоянными магнитами или гибридные, двухфазные биполярные или четырехфазные однополярные.
Для наших целей мы сосредоточимся на шаговых двигателях, которые можно
управляется общедоступными драйверами.
Это: шаговые двигатели с постоянными магнитами или гибридные, двухфазные биполярные или четырехфазные однополярные.
В первую очередь необходимо учитывать работу, которую должен выполнять двигатель. Как и следовало ожидать, более крупные двигатели способны развивать большую мощность. Размер шаговых двигателей варьируется от размера арахиса до огромных монстров NEMA 57.
Большинство двигателей имеют номинальный крутящий момент. Это то, на что вам нужно обратить внимание, чтобы решить, достаточно ли у двигателя силы, чтобы делать то, что вы хотите.
NEMA 17 — это стандартный размер, используемый в 3D-принтерах и небольших станках с ЧПУ. Меньшие двигатели находят применение во многих робототехнических и аниматронных приложениях. Более крупные рамы NEMA распространены в станках с ЧПУ и в промышленных приложениях.
Номера NEMA определяют стандартные размеры лицевой панели для монтажа двигателя. Они не определяют другие характеристики двигателя. Два разных двигателя NEMA 17 могут иметь совершенно разные электрические или механические характеристики и не обязательно являются взаимозаменяемыми.
Они не определяют другие характеристики двигателя. Два разных двигателя NEMA 17 могут иметь совершенно разные электрические или механические характеристики и не обязательно являются взаимозаменяемыми.
Следующее, на что следует обратить внимание, это требуемое разрешение позиционирования. Количество шагов на один оборот варьируется от 4 до 400. Обычно доступны 24, 48 и 200 шагов.
Разрешение часто выражается в градусах на шаг. Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов.
Платой за высокое разрешение является скорость и крутящий момент. Двигатели с большим числом шагов работают на более низких оборотах, чем двигатели аналогичного размера. А более высокая частота шагов, необходимая для вращения этих двигателей, приводит к более низкому крутящему моменту, чем двигатель аналогичного размера с малым числом шагов при аналогичных скоростях.
Еще один способ добиться высокого разрешения позиционирования — использовать зубчатую передачу. Зубчатая передача 32: 1, подаваемая на выход двигателя с 8 шагами / оборотами, приведет к двигателю с 256 шагами.
Зубчатая передача 32: 1, подаваемая на выход двигателя с 8 шагами / оборотами, приведет к двигателю с 256 шагами.
Зубчатая передача также увеличивает крутящий момент двигателя. Некоторые крошечные шаговые двигатели с редуктором способны развивать впечатляющий крутящий момент. Но компромисс, конечно, скорость. Редукторные шаговые двигатели обычно ограничиваются приложениями с низкими оборотами.
Люфт — еще одна проблема мотор-редукторов. Когда двигатель меняет направление, он должен компенсировать любую слабину, которая может быть в зубчатой передаче. Это может повлиять на точность позиционирования.
Еще одна вещь, которую следует учитывать, — это то, как двигатель будет взаимодействовать с остальной системой привода. Доступны двигатели с различными типами валов:
-
Круглый или D-образный вал : Они доступны в различных стандартных диаметрах, и существует множество шкивов, шестерен и муфт валов, разработанных для соответствия.
 Валы «D» имеют одну плоскую сторону, чтобы предотвратить проскальзывание. Это желательно, когда задействованы высокие крутящие моменты.
Валы «D» имеют одну плоскую сторону, чтобы предотвратить проскальзывание. Это желательно, когда задействованы высокие крутящие моменты. - Вал-шестерня : На некоторых валах прямо врезаны зубья шестерни. Обычно они предназначены для сопряжения с модульными зубчатыми передачами.
-
Вал ходового винта : Двигатели с валами ходового винта используются для создания линейных приводов. Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах.
Существует множество вариантов подключения шагового двигателя. Для наших целей мы сосредоточимся на шаговых двигателях, которыми можно управлять с помощью общедоступных драйверов. Это шаговые двигатели с постоянными магнитами или гибридные, подключенные как 2-фазные биполярные или 4-фазные униполярные.
Шаговый двигатель может иметь любое количество катушек. Но они соединены в группы, называемые «фазами». Все катушки в фазе находятся под напряжением вместе.
Все катушки в фазе находятся под напряжением вместе.
Униполярные драйверы всегда подают питание на фазы одинаковым образом. Одно отведение, «общее» отведение, всегда будет отрицательным. Другой вывод всегда будет положительным. Униполярные драйверы могут быть реализованы с помощью простой транзисторной схемы. Недостатком является то, что доступный крутящий момент меньше, потому что только половина катушек может быть запитана одновременно.
Драйверы Bipolar используют схему Н-моста, чтобы фактически изменить направление тока, протекающего по фазам. При подаче питания на фазы с чередованием полярности все катушки можно заставить работать, вращая двигатель.
Двухфазный биполярный двигатель имеет 2 группы катушек. Четырехфазный униполярный двигатель имеет 4 провода. Двухфазный двухполярный двигатель будет иметь 4 провода — по 2 на каждую фазу. Некоторые двигатели поставляются с гибкой проводкой, которая позволяет использовать двигатель как биполярный, так и униполярный.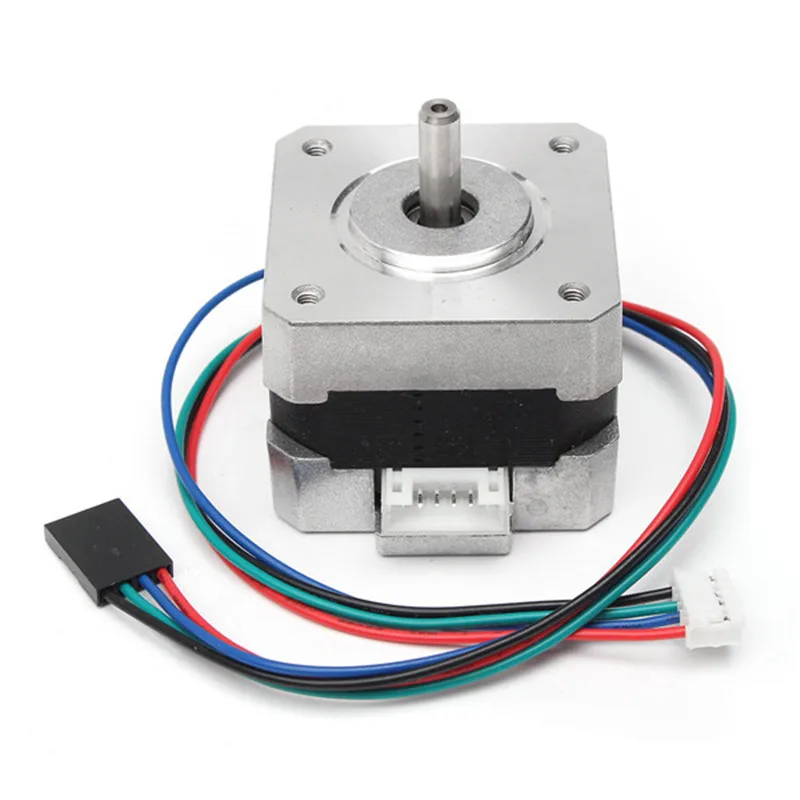
5-проводной двигатель
Этот тип распространен в небольших униполярных двигателях. Все общие провода катушки связаны внутри и выведены как 5-й провод. Этот двигатель может работать только как униполярный двигатель.
6-проводной двигатель
Этот двигатель подключается только к общим проводам двух парных фаз. Эти два провода можно соединить для создания 5-проводного униполярного двигателя.
Или вы можете просто игнорировать их и относиться к этому как к биполярному двигателю!
8-проводной двигатель
8-проводной униполярный двигатель является наиболее универсальным двигателем из всех. Его можно вести несколькими способами:
-
4-х фазный однополярный — Все общие провода соединены вместе — как у 5-ти проводного двигателя.
-
2-фазный двухполюсный ряд — Фазы соединены последовательно — как у 6-проводного двигателя.

