Что такое шаговый двигатель. Как устроен шаговый электродвигатель. Какой принцип работы шагового двигателя. Где применяются шаговые двигатели. Каковы преимущества и недостатки шаговых электродвигателей.
Что такое шаговый двигатель и как он устроен
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения. Его основные компоненты:
- Статор с обмотками
- Ротор с постоянными магнитами или зубчатой структурой
- Корпус
- Подшипники
- Вал
В отличие от обычных электродвигателей, шаговые двигатели поворачивают вал не непрерывно, а пошагово. Каждый шаг соответствует фиксированному углу поворота, обычно от 0.9° до 5°.
Принцип работы шагового электродвигателя
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора:
- При подаче тока на обмотки статора создается магнитное поле
- Это поле взаимодействует с магнитным полем ротора
- В результате ротор поворачивается, стремясь занять положение с минимальным магнитным сопротивлением
- При переключении обмоток статора магнитное поле смещается, вызывая новый поворот ротора
Последовательное переключение обмоток вызывает пошаговое вращение вала двигателя. Угол поворота зависит от конструкции двигателя и схемы управления.
Основные виды шаговых двигателей
Существует несколько основных типов шаговых электродвигателей:
1. С постоянными магнитами
Ротор содержит постоянные магниты. Обеспечивают высокий крутящий момент. Бывают:
- Биполярные — две обмотки без отводов
- Униполярные — обмотки с центральными отводами
2. С переменным магнитным сопротивлением
Ротор выполнен из магнитомягкого материала с зубчатой структурой. Отличаются простотой конструкции и низкой стоимостью.
3. Гибридные
Сочетают особенности двух предыдущих типов. Обеспечивают высокую точность и крутящий момент. Наиболее распространены в современных применениях.
Где применяются шаговые двигатели
Шаговые электродвигатели нашли широкое применение в различных отраслях:
- Станки с ЧПУ
- 3D-принтеры
- Робототехника
- Медицинское оборудование
- Автомобильная электроника
- Системы позиционирования антенн
- Офисная техника (принтеры, сканеры)
- Системы автоматизации
Их использование оправдано везде, где требуется точное позиционирование и контроль перемещений.
Преимущества шаговых двигателей
Шаговые электродвигатели обладают рядом преимуществ:
- Высокая точность позиционирования без обратной связи
- Отработка заданного угла поворота
- Высокий крутящий момент на низких скоростях
- Быстрый старт, остановка и реверс
- Высокая надежность из-за отсутствия щеток
- Однозначная зависимость положения от входных импульсов
Эти особенности делают их незаменимыми во многих применениях.
Недостатки шаговых электродвигателей
Однако у шаговых двигателей есть и некоторые недостатки:
- Возможность пропуска шагов при перегрузке
- Резонансные явления на определенных скоростях
- Относительно невысокая удельная мощность
- Сложная схема управления
- Потребление энергии даже в неподвижном состоянии
При проектировании систем с шаговыми двигателями необходимо учитывать эти особенности.
Способы управления шаговыми двигателями
Существует несколько основных режимов управления шаговыми двигателями:
1. Полношаговый режим
Самый простой режим, при котором за один шаг ротор поворачивается на полный угол шага. Обеспечивает максимальный крутящий момент.

2. Полушаговый режим
Позволяет уменьшить угол поворота вдвое за счет попеременного включения одной и двух фаз. Повышает плавность вращения.
3. Микрошаговый режим
Обеспечивает еще более мелкое деление шага путем подачи на обмотки токов, меняющихся по синусоидальному закону. Позволяет добиться очень плавного вращения.
Выбор режима зависит от требований к точности, плавности хода и крутящему моменту в конкретном применении.
Особенности работы шаговых двигателей
При работе с шаговыми двигателями следует учитывать некоторые их особенности:
- Максимальный момент достигается на низких скоростях
- При превышении предельной частоты шагов возможен пропуск шагов
- Необходимо правильно выбирать режим разгона и торможения
- Возможно возникновение резонансных явлений на определенных скоростях
- Точность позиционирования зависит от нагрузки и скорости
Понимание этих особенностей позволяет оптимально использовать шаговые двигатели в различных применениях.
устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
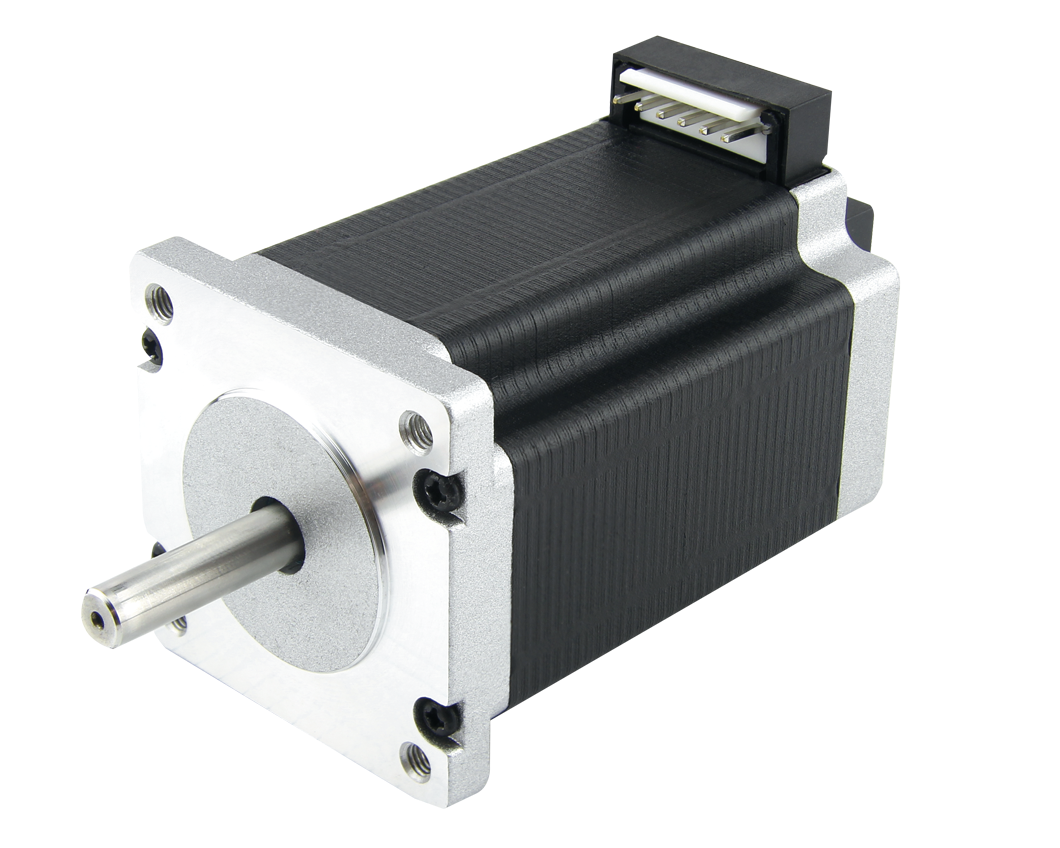
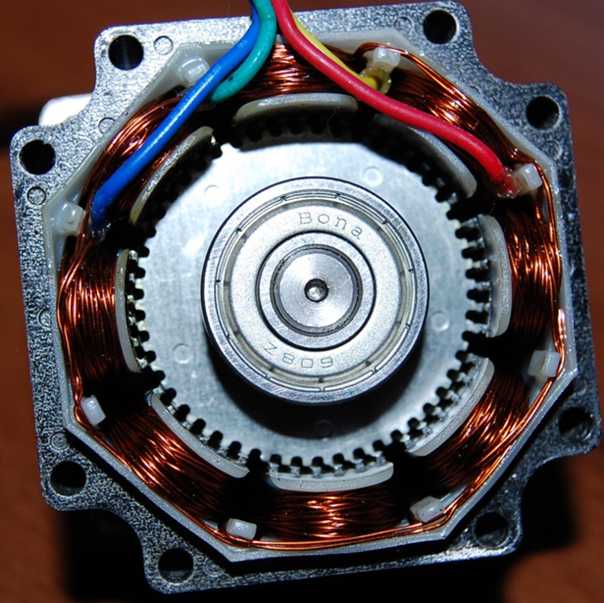
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.
Принцип действия
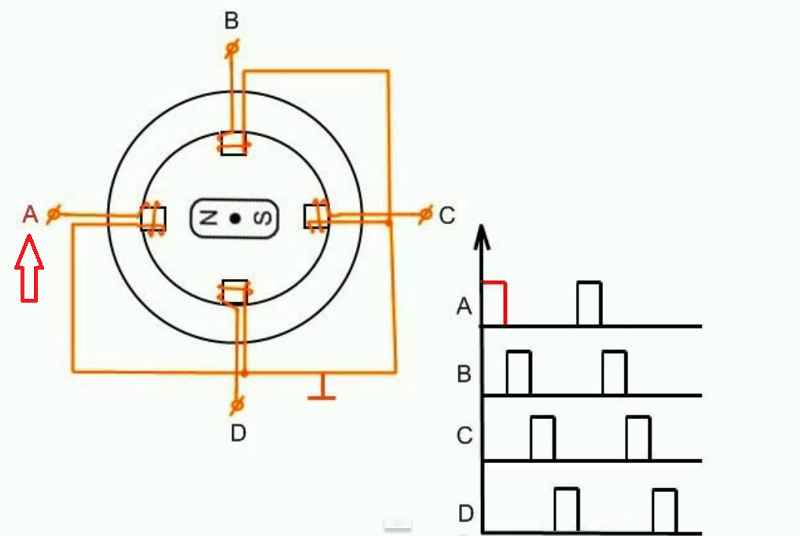
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.
Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.

ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет.
Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.

Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
- Какие бывают виды электрических двигателей и чем они отличаются
- Что такое шаговое напряжение и чем оно опасно
- Что такое синхронный двигатель и где он используется
Схема управления шаговым двигателем и принцип работы
ШАГОВЫЕ ДВИГАТЕЛИ — ПРИНЦИП РАБОТЫ
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определённый угол, для совершения механической работы, приводящей в движение различные механизмы.
Принцип работы шаговых двигателей
Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора (состоящего из катушек (обмоток)) и ротора, на котором установлены постоянные магниты.
На картинке изображены 4 обмотки, расположенные на статоре под углом в 90 градусов относительно друг друга. Тип обмотки зависит от конкретного типа подключения шагового двигателя (как подключить шаговый двигатель).На примере выше обмотки двигателя не соединены, значит двигатель с такой схемой имеет шаг поворота в 90 градусов. Обмотки задействуются поочередно по часовой стрелке, а направление вращения вала двигателя обусловлено порядком задействования обмоток. Вал двигателя вращается на 90 градусов каждый раз, когда через очередную катушку протекает ток.
Шаговые двигатели — применение
Область применения шаговых двигателей довольно широка, они используются в промышленности, в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами (униполярные и биполярные) и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
рис. 2).
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Управление биполярным шаговым двигателем требует наличия мостовой схемы. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется физическими возможностями шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению вала двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя.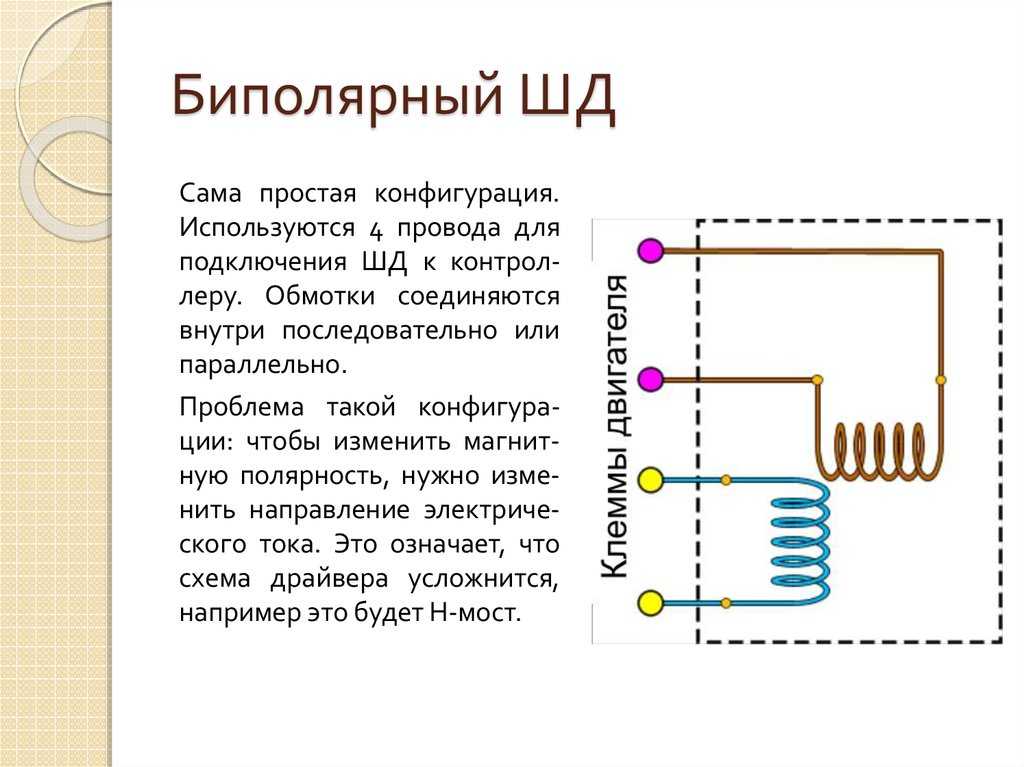 Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Важными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.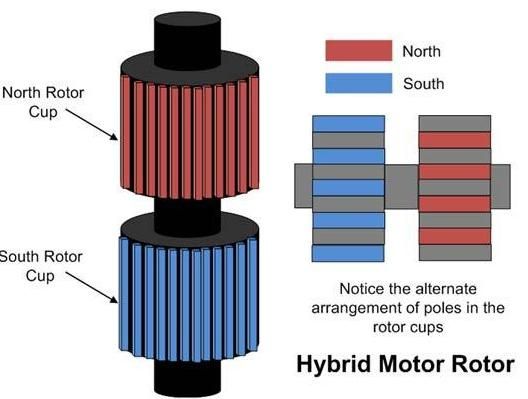
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемистость падает с увеличением нагрузки.
DARXTON
Шаговый двигатель принцип работы
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360° ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360°/ 100 шагов = 3,6°за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9°на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360°/ (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D.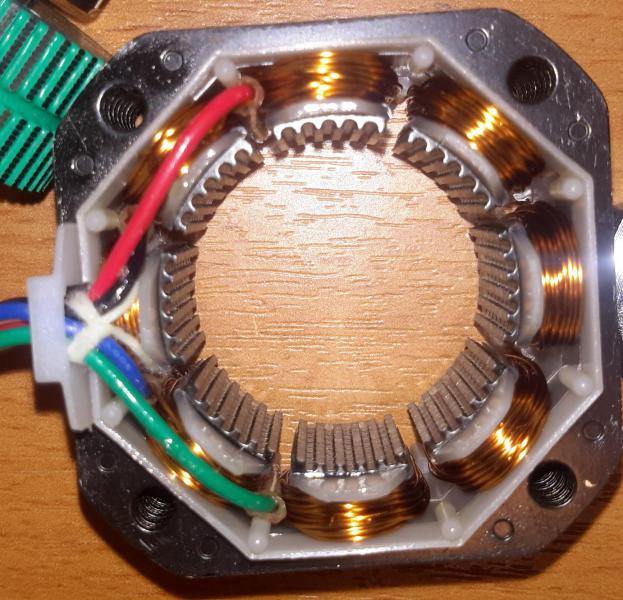 Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер.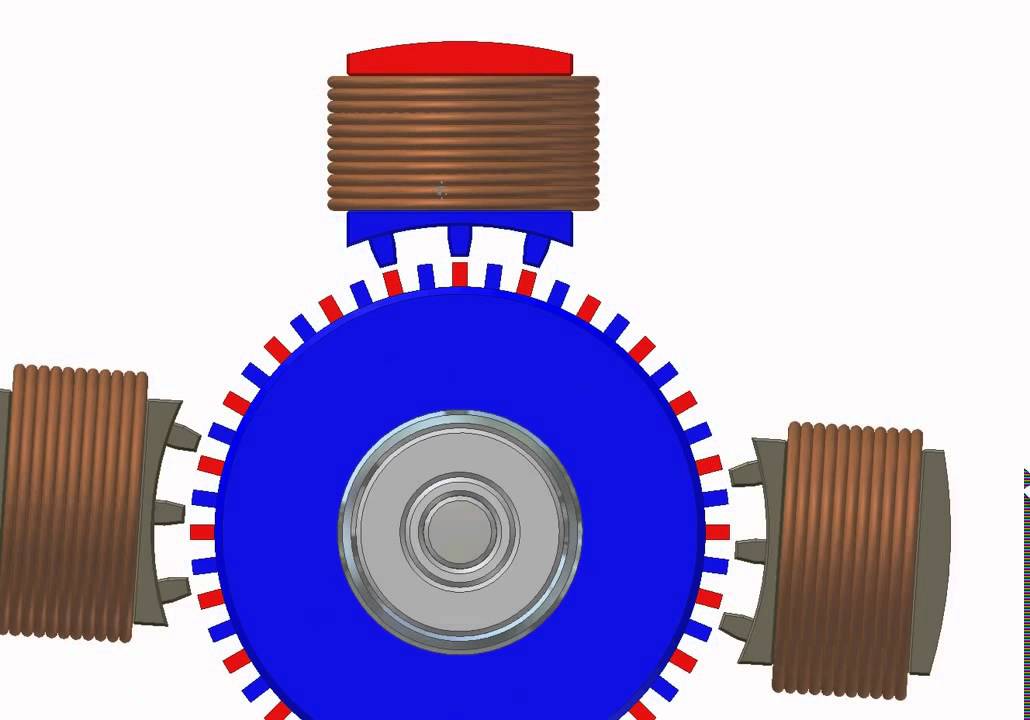 При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Смотрите также: Правила рациональных покупок: как не тратить лишних денег в супермаркете
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.

- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5°. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5°.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля.
 Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек. - Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1°, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей.
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Теория шагового двигателя
Другой распространенной обмоткой является униполярная обмотка. Он состоит из двух обмоток на полюсе, соединенных таким образом, что когда одна обмотка находится под напряжением, создается магнитный северный полюс, а когда другая обмотка находится под напряжением, создается южный полюс. Это называется униполярной обмоткой, потому что электрическая полярность, то есть ток, протекающий от привода к катушкам, никогда не меняется на противоположный. Последовательность шагов показана на рис. 6. Эта конструкция позволяет упростить электронный привод. Однако доступный крутящий момент примерно на 30% меньше по сравнению с биполярной обмоткой. Крутящий момент ниже, потому что катушка под напряжением использует вдвое меньше меди по сравнению с биполярной катушкой.
6. Эта конструкция позволяет упростить электронный привод. Однако доступный крутящий момент примерно на 30% меньше по сравнению с биполярной обмоткой. Крутящий момент ниже, потому что катушка под напряжением использует вдвое меньше меди по сравнению с биполярной катушкой.
Рисунок 6: Униполярная обмотка
| Другие ступенчатые углы |
|
Для получения меньших углов шага требуется больше полюсов как на роторе, так и на статоре. На роторе требуется такое же количество пар полюсов, как и на одном статоре. Ротор двигателя 7,5° имеет 12 пар полюсов, а каждая полюсная пластина имеет 12 зубьев. Две полюсные пластины на катушку и две катушки на двигатель; следовательно, 48 полюсов в шаговом двигателе 7,5 °. На рис. 7 показаны 4 полюсные пластины двигателя 7,5° в разрезе. Конечно, несколько шагов можно комбинировать, чтобы обеспечить более крупные движения. |
| |
| Точность |
|
Точность для степперов со стопкой банок составляет 6–7 % на шаг, не суммируется. Шаговый двигатель с шагом 7,5° будет находиться в пределах 0,5° от теоретического положения для каждого шага, независимо от того, сколько шагов было сделано. Инкрементальные ошибки не являются кумулятивными, поскольку механическая конструкция двигателя диктует движение на 360° для каждого полного оборота. Физическое положение полюсных пластин и магнитная диаграмма ротора приводят к повторяемости диаграммы направленности при каждом повороте на 360° (без нагрузки). |
| |
| Резонанс |
|
Шаговые двигатели имеют собственную резонансную частоту в результате того, что двигатель представляет собой пружинно-массовую систему. |
| |
| Крутящий момент |
|
Крутящий момент, создаваемый определенным роторным шаговым двигателем, зависит от: • Шаг скорости (Усилие, создаваемое линейным двигателем, также зависит от этих факторов. Крутящий момент представляет собой сумму момента трения (Tf) и момента инерции (Ti). Момент трения (унции-дюймы или грамм-см) — это сила (F) в унциях или граммах, необходимая для перемещения груза, умноженная на длину в дюймах или см плеча рычага, используемого для привода груза ( г), как показано на рисунке 8. Рис. 8. Момент трения — это сила (F), необходимая для перемещения груза, умноженная на длину плеча рычага ( р ). Инерционный крутящий момент (Ti) — это крутящий момент, необходимый для ускорения груза (грамм-см2). Следует отметить, что по мере увеличения частоты шагов двигателя увеличивается и противоэлектродвижущая сила (ЭДС) (т. е. генерируемое напряжение) двигателя. Это ограничивает протекание тока и приводит к уменьшению полезного выходного крутящего момента. |
| |
| Линейные приводы |
|
Вращательное движение шагового двигателя может быть преобразовано в линейное с помощью нескольких механических средств. К ним относятся зубчатая рейка, ремень, шкивы и другие механические соединения. Все эти варианты требуют различных внешних механических компонентов. Наиболее эффективный способ выполнить это преобразование — внутри самого двигателя. Линейный привод был впервые представлен в 1968. Некоторые типичные линейные приводы показаны ниже. Рис. 9: Типовые линейные приводы Преобразование вращательного движения в поступательное внутри линейного привода осуществляется с помощью резьбовой гайки и ходового винта. Внутренняя часть ротора имеет резьбу, а вал заменен ходовым винтом. Для создания линейного движения необходимо предотвратить вращение ходового винта. Рис. 10. Линейный привод в разрезе, показывающий соединение ротора с резьбой и ходового винта. Линейное перемещение на шаг двигателя определяется углом шага вращения двигателя и шагом резьбы комбинации гайки ротора и ходового винта. Резьба с крупным шагом обеспечивает большее перемещение на шаг, чем винты с мелким шагом. Однако при заданной скорости шага винты с мелким шагом обеспечивают большее усилие. Винты с мелким шагом, как правило, не могут быть закручены вручную или перемещены, когда двигатель обесточен, в то время как многие винты с крупным шагом могут. Между ротором и резьбой должен быть небольшой зазор, чтобы обеспечить свободу движения для эффективной работы. |
| |
| Усталость/жизнь |
|
При правильном применении линейные приводы марки Haydon™ обеспечивают до 20 миллионов циклов, а роторные двигатели Haydon обеспечивают до 25 000 часов работы. Непрерывный режим: Работа двигателя при его номинальном напряжении. Рабочий цикл 25%: Работа двигателя при удвоенном номинальном напряжении на приводе L/R. Двигатель включен примерно 25% времени. Мощность двигателя примерно на 60 % больше, чем при номинальном напряжении. Обратите внимание, рабочий цикл не связан с нагрузкой на двигатель. Ресурс: Ресурс линейного привода — это количество циклов, которое двигатель может выполнять при заданной нагрузке и поддерживать точность шага. Срок службы роторного двигателя – это количество часов работы. Один цикл: Цикл линейного привода состоит из выдвижения и возврата в исходное положение. Существуют некоторые общие рекомендации, которые можно использовать для выбора подходящего двигателя и обеспечения максимального срока службы. В конечном счете, чтобы определить производительность шагового двигателя в данной системе, лучше всего провести тестирование окончательной сборки в «полевых условиях» или в настройках, которые максимально приближены к этим условиям. Поскольку в шаговом двигателе нет изнашиваемых щеток, его срок службы обычно намного превышает срок службы других механических компонентов системы. Если шаговый двигатель выйдет из строя, вероятно, будут задействованы определенные компоненты. Подшипники и интерфейс ходового винта/гайки (в линейных приводах) обычно являются первыми компонентами, испытывающими усталость. Требуемый крутящий момент или тяга, а также условия эксплуатации являются факторами, влияющими на эти компоненты двигателя. Если двигатель работает при номинальном крутящем моменте или тяге или близко к ним, это может повлиять на срок службы. Если двигатель используется с уменьшенным рабочим циклом и к двигателю приложено чрезмерное напряжение, время «включения» должно быть таким, чтобы не превышался максимальный рост температуры двигателя. Если у двигателя недостаточно времени «выключено», будет выделяться слишком много тепла, что приведет к перегреву обмоток и, в конечном итоге, к выходу из строя. Надлежащее проектирование системы, минимизирующей эти факторы, обеспечит максимальный срок службы двигателя. Первым шагом к максимальному увеличению срока службы является выбор двигателя с коэффициентом безопасности, равным двум или более. Вторым шагом является обеспечение механической прочности системы за счет сведения к минимуму боковых нагрузок, несбалансированных нагрузок и ударных нагрузок. Система также должна рассеивать тепло. Воздушный поток вокруг двигателя или монтаж, который обеспечивает некоторый отвод тепла, является типичным средством отвода тепла. Если в системе присутствуют агрессивные химикаты, двигатель и все остальные компоненты должны быть защищены. Наконец, тестирование двигателя и узла в «полевых условиях» обеспечит пригодность для применения. При соблюдении этих простых правил линейные приводы Haydon™ обеспечивают надежную работу в широком диапазоне применений. Если вам нужна помощь в проектировании, инженеры по применению Haydon Kerk помогут вам добиться максимального срока службы и производительности наших двигателей. |
 Например, шесть шагов шагового двигателя на 7,5° обеспечат перемещение на 45°.
Например, шесть шагов шагового двигателя на 7,5° обеспечат перемещение на 45°.  Когда скорость шага равна собственной частоте двигателя, может быть слышно изменение шума, издаваемого двигателем, а также усиление вибрации. Резонансная точка будет варьироваться в зависимости от приложения и нагрузки, но обычно происходит где-то между 70 и 120 шагами в секунду. В тяжелых случаях двигатель может терять ступени на резонансной частоте. Изменение скорости шага — простейший способ избежать многих проблем, связанных с резонансом в системе. Кроме того, полушаг или микрошаг обычно уменьшают проблемы с резонансом. При разгоне до скорости необходимо как можно быстрее пройти зону резонанса.
Когда скорость шага равна собственной частоте двигателя, может быть слышно изменение шума, издаваемого двигателем, а также усиление вибрации. Резонансная точка будет варьироваться в зависимости от приложения и нагрузки, но обычно происходит где-то между 70 и 120 шагами в секунду. В тяжелых случаях двигатель может терять ступени на резонансной частоте. Изменение скорости шага — простейший способ избежать многих проблем, связанных с резонансом в системе. Кроме того, полушаг или микрошаг обычно уменьшают проблемы с резонансом. При разгоне до скорости необходимо как можно быстрее пройти зону резонанса.  )
) 
 Когда ротор вращается, внутренняя резьба входит в зацепление с ходовым винтом, что приводит к линейному движению. Изменение направления вращения меняет направление линейного движения на противоположное. Базовая конструкция линейного привода показана на рис. 10.
Когда ротор вращается, внутренняя резьба входит в зацепление с ходовым винтом, что приводит к линейному движению. Изменение направления вращения меняет направление линейного движения на противоположное. Базовая конструкция линейного привода показана на рис. 10.  Это приводит к осевому люфту от 0,001 до 0,003 дюйма (также называемому люфтом). Если требуется исключительная точность позиционирования, люфт можно компенсировать, всегда приближаясь к конечному положению с одного и того же направления. Выполнение преобразования вращательного движения в поступательное внутри ротора значительно упрощает процесс обеспечения линейного движения для многих приложений. Поскольку линейный привод является автономным, требования к внешним компонентам, таким как ремни и шкивы, значительно снижаются или устраняются. Меньшее количество компонентов упрощает процесс проектирования, снижает общую стоимость и размер системы, а также повышает надежность продукта.
Это приводит к осевому люфту от 0,001 до 0,003 дюйма (также называемому люфтом). Если требуется исключительная точность позиционирования, люфт можно компенсировать, всегда приближаясь к конечному положению с одного и того же направления. Выполнение преобразования вращательного движения в поступательное внутри ротора значительно упрощает процесс обеспечения линейного движения для многих приложений. Поскольку линейный привод является автономным, требования к внешним компонентам, таким как ремни и шкивы, значительно снижаются или устраняются. Меньшее количество компонентов упрощает процесс проектирования, снижает общую стоимость и размер системы, а также повышает надежность продукта. 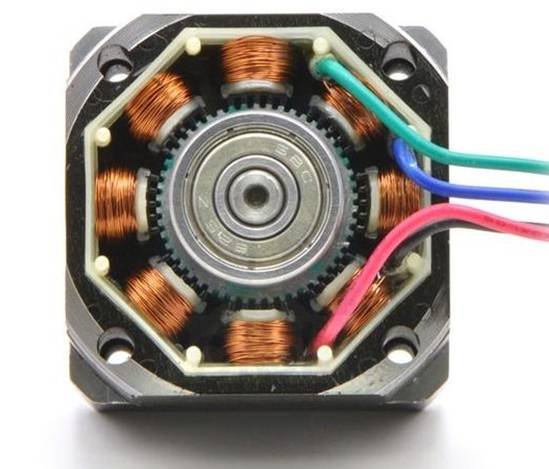 В конечном итоге усталость двигателя и результирующий срок службы определяются уникальным применением каждого клиента. Следующие определения важны для понимания двигательной жизни и усталости.
В конечном итоге усталость двигателя и результирующий срок службы определяются уникальным применением каждого клиента. Следующие определения важны для понимания двигательной жизни и усталости. 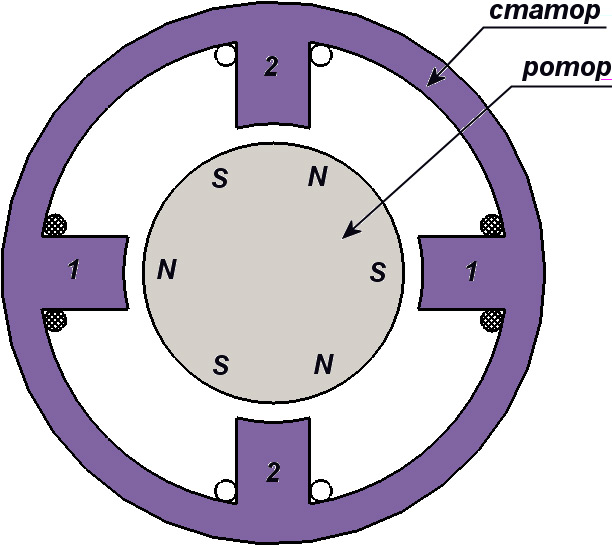
 Испытания Haydon Kerk Motion Solutions показали, что срок службы двигателя увеличивается в геометрической прогрессии при снижении рабочих нагрузок. Как правило, двигатели должны быть рассчитаны на работу с нагрузкой от 40% до 60% от их максимальной допустимой нагрузки. Факторы окружающей среды, такие как высокая влажность, воздействие агрессивных химикатов, чрезмерная грязь/мусор и высокая температура, влияют на срок службы двигателя. Механические факторы в сборке, такие как боковая нагрузка на вал линейных приводов или несбалансированная нагрузка в поворотных приводах, также отрицательно влияют на срок службы.
Испытания Haydon Kerk Motion Solutions показали, что срок службы двигателя увеличивается в геометрической прогрессии при снижении рабочих нагрузок. Как правило, двигатели должны быть рассчитаны на работу с нагрузкой от 40% до 60% от их максимальной допустимой нагрузки. Факторы окружающей среды, такие как высокая влажность, воздействие агрессивных химикатов, чрезмерная грязь/мусор и высокая температура, влияют на срок службы двигателя. Механические факторы в сборке, такие как боковая нагрузка на вал линейных приводов или несбалансированная нагрузка в поворотных приводах, также отрицательно влияют на срок службы. 
Шаговый двигатель: основы, типы и работа
Что такое шаговый двигатель?
Шаговый двигатель или шаговый двигатель — это бесщеточный синхронный двигатель, который делит полный оборот на несколько шагов. В отличие от бесщеточного двигателя постоянного тока, который непрерывно вращается при подаче на него фиксированного напряжения постоянного тока, шаговый двигатель вращается с дискретными углами шага. Поэтому шаговые двигатели изготавливаются с шагом на оборот 12, 24, 72, 144, 180 и 200, что дает угол шага 30, 15, 5, 2,5, 2 и 1,8 градуса на шаг. Шаговый двигатель может управляться как с обратной связью, так и без нее.
Рис. 1. Изображение широко используемого бесщеточного шагового двигателя постоянного тока
Как работает шаговый двигатель?
Шаговые двигатели работают по принципу электромагнетизма. Вал ротора из мягкого железа или магнита окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут быть зубчатыми или нет, в зависимости от типа шагового двигателя. Когда на статоры подается питание, ротор перемещается, чтобы выровняться со статором (в случае шагового двигателя с постоянным магнитом) или перемещается, чтобы иметь минимальный зазор со статором (в случае шагового двигателя с переменным сопротивлением). Таким образом, статоры последовательно запитываются, чтобы вращать шаговый двигатель. Получите больше информации о работе шаговых двигателей с помощью интересных изображений на сайте stepper motor Insight.
Вал ротора из мягкого железа или магнита окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут быть зубчатыми или нет, в зависимости от типа шагового двигателя. Когда на статоры подается питание, ротор перемещается, чтобы выровняться со статором (в случае шагового двигателя с постоянным магнитом) или перемещается, чтобы иметь минимальный зазор со статором (в случае шагового двигателя с переменным сопротивлением). Таким образом, статоры последовательно запитываются, чтобы вращать шаговый двигатель. Получите больше информации о работе шаговых двигателей с помощью интересных изображений на сайте stepper motor Insight.
Рис. 2: Общий обзор внутренней структуры и работы типичного шагового двигателя
Типы шагового двигателя
По строительству. Пошаговые двигатели составляют три широких класса:
1. Шаговый двигатель с постоянным магнитом
2. Шаговый двигатель с переменным сопротивлением
3. Гибридный шаговый двигатель
Гибридный шаговый двигатель
Эти три типа подробно описаны в следующих разделах.
Тип 1: Постоянный магнит
1. Шаговый двигатель с постоянным магнитом :
Полюса ротора и статора шагового двигателя с постоянными магнитами не зубчатые. Вместо этого ротор имеет чередующиеся северный и южный полюса, параллельные оси вала ротора.
Рис. 3: Схема поперечного сечения двухфазного постоянного шагового двигателя
Когда статор находится под напряжением, он создает электромагнитные полюса. Магнитный ротор выравнивается вдоль магнитного поля статора. Затем в последовательности подается питание на другой статор, так что ротор движется и выравнивается с новым магнитным полем. Таким образом, подача питания на статоры в фиксированной последовательности приводит к вращению шагового двигателя на фиксированные углы.
Рис. 4. Схема, поясняющая работу шагового двигателя с постоянными магнитами
Разрешение шагового двигателя с постоянными магнитами можно увеличить, увеличив число полюсов ротора или количество фаз.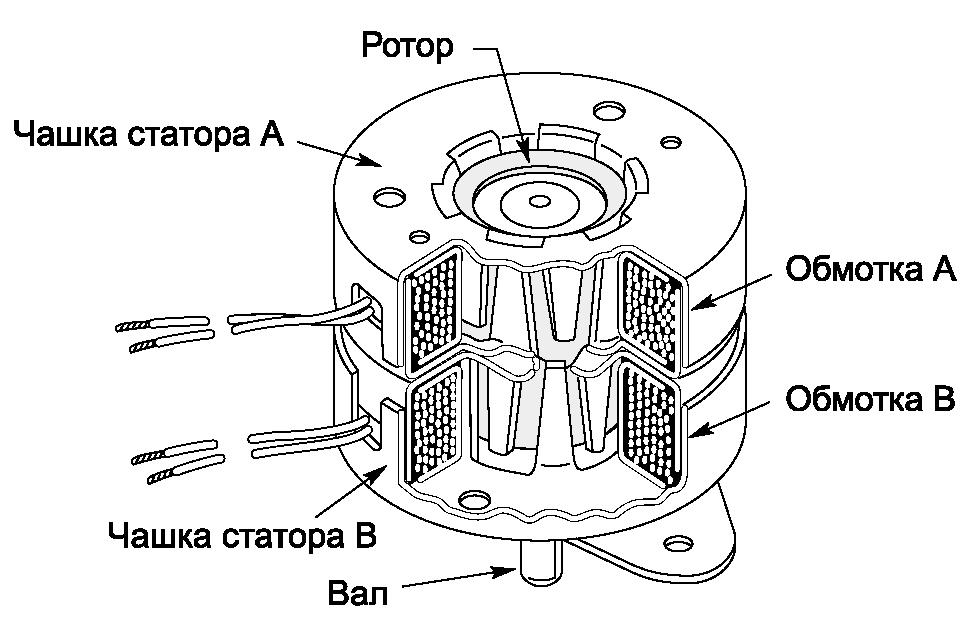
Рис. 5. Рисунок, показывающий способы увеличения разрешения шагового двигателя с постоянными магнитами
0126 2.
Шаговый двигатель с переменным сопротивлением :Шаговый двигатель с переменным сопротивлением имеет зубчатый ротор из немагнитного мягкого железа. Когда катушка статора находится под напряжением, ротор перемещается так, чтобы между статором и его зубьями был минимальный зазор.
Рис. 6. Принципиальная схема двухфазного шагового двигателя с регулируемым сопротивлением Теперь, когда на следующий статор подается питание, ротор перемещается, чтобы выровнять свои зубья со следующим статором. Таким образом, подача питания на статоры в фиксированной последовательности завершает вращение шагового двигателя.
Рис. 7: Диаграмма, поясняющая работу шагового двигателя с переменным сопротивлением
Разрешение шагового двигателя с переменным сопротивлением можно увеличить, увеличив количество зубцов в роторе и число фаз.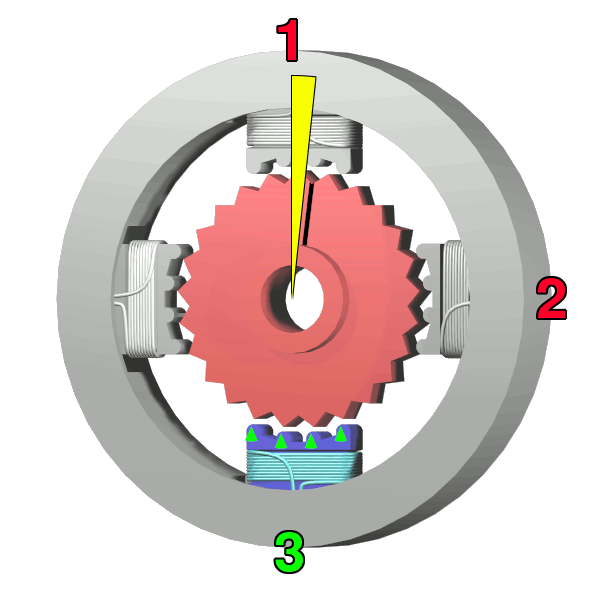
Рис. 8. Рисунок, показывающий способы увеличения разрешения шагового двигателя с переменным сопротивлением
0218
3. Гибридный шаговый двигатель :
Гибридный шаговый двигатель представляет собой комбинацию постоянного магнита и переменного сопротивления. Он имеет ротор с магнитными зубьями, который лучше направляет магнитный поток в нужное место в воздушном зазоре.
Рис. 9. Конструкция двухфазного гибридного двигателя
Магнитный ротор имеет две чашки. Один для северных полюсов и второй для южных полюсов. Чашки ротора сконструированы таким образом, что северный и южный полюса расположены попеременно. Узнайте о гибридном шаговом двигателе.
Рис. 10: Схема, показывающая внутреннюю структуру магнитного ротора в гибридном двигателе
Гибридный двигатель вращается по тому же принципу, что и обмотки статора.
Рис. 11: Диаграмма, объясняющая работу гибридного шагового двигателя
Типы проводки
. моторы. Они могут быть однополярными или биполярными. У униполярного шагового двигателя по две обмотки на фазу. Две обмотки к полюсу могут иметь один общий вывод, т. е. с отводом от центра. Униполярный двигатель, таким образом, имеет пять, шесть или восемь выводов. В конструкциях, в которых общие два полюса разделены, но имеют отвод посередине, двигатель имеет шесть выводов. Если центральные ответвления двух полюсов внутренне короткие, двигатель имеет пять проводов. Восьмивыводной униполярный двигатель обеспечивает как последовательное, так и параллельное соединение, в то время как пятивыводные и шестипроводные двигатели имеют последовательное соединение катушек статора. Униполярный двигатель упрощает работу, так как при их работе нет необходимости реверсировать ток в цепи возбуждения. Их еще называют бифилярными моторами.
Рис. 12. Схема подключения униполярного шагового двигателя с разными выводами
В биполярном шаговом двигателе имеется одна обмотка на полюс. Направление тока должно быть изменено управляющей схемой, поэтому управляющая схема биполярного шагового двигателя становится сложной. Их также называют унифилярными двигателями.
Рис. 13. Схема подключения биполярного шагового двигателя с выводами
Шаговые режимы
Существует три шаговых режима шагового двигателя. Шаговый режим относится к последовательности включения катушек статора.
1. Волновой привод (включение одной фазы)
2. Полный привод (включение двух фаз одновременно)
3. Полупривод (включение одной и двух фаз одновременно)
1 . Волновой привод :
В шаговом режиме волнового привода одновременно активируется только одна фаза.
Рис. 14. Шаблон шагового режима волнового привода в шаговом двигателе
2. Полный привод :
В режиме полного привода одновременно подаются две фазы.
Рис. 15: Схема шагового режима полного привода в шаговом двигателе
3. Полупривод : две фазы поочередно запитываются одной фазой и
половинами. Это увеличивает разрешение двигателя.
Рис. 16: Образец режима шаговой режима полупривода в шаговом двигателе
Подано под: Статьи
.
Что такое шаговый двигатель? Типы, конструкция, работа и применение
Содержание
Изобретение специальных плат драйверов шаговых двигателей и других технологий цифрового управления для взаимодействия с шаговый двигатель для систем на базе ПК являются причиной широкого распространения шаговых двигателей в последнее время.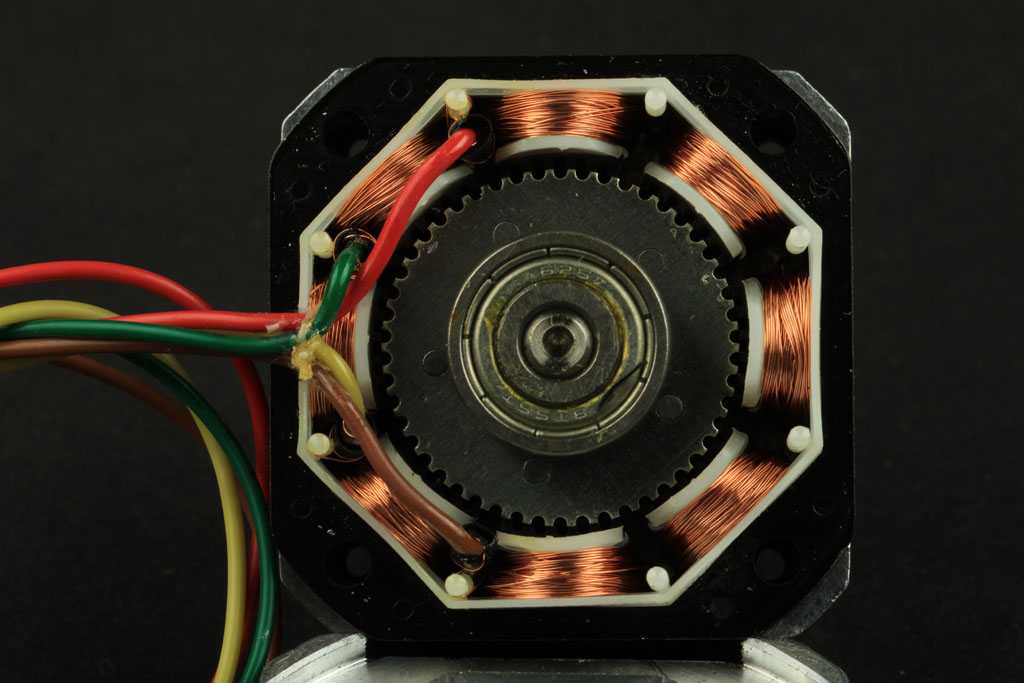 Шаговые двигатели становятся идеальным выбором для систем автоматизации, которым требуется точное управление скоростью или точное позиционирование, или и то, и другое.
Шаговые двигатели становятся идеальным выбором для систем автоматизации, которым требуется точное управление скоростью или точное позиционирование, или и то, и другое.
Поскольку мы знаем, что многие промышленные электродвигатели используются с управлением с обратной связью с обратной связью для достижения точного позиционирования или точного управления скоростью, с другой стороны, шаговый двигатель может работать с контроллером без обратной связи. Это, в свою очередь, снижает общую стоимость системы и упрощает конструкцию машины по сравнению с сервосистемой управления. Кратко обсудим шаговый двигатель и его типы .
- Связанный пост: Серводвигатель — типы, конструкция, работа и применение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточное электромеханическое устройство, которое преобразует последовательность электрических импульсов, подаваемых на их обмотки возбуждения, в точно определенное пошаговое механическое вращение вала. Вал двигателя поворачивается на фиксированный угол для каждого дискретного импульса. Это вращение может быть линейным или угловым. Он получает одношаговое движение за один входной импульс.
Вал двигателя поворачивается на фиксированный угол для каждого дискретного импульса. Это вращение может быть линейным или угловым. Он получает одношаговое движение за один входной импульс.
При подаче последовательности импульсов она поворачивается на определенный угол. Угол, на который поворачивается вал шагового двигателя для каждого импульса, называется углом шага, который обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала двигателя контролируется путем управления количеством импульсов. Благодаря этой уникальной особенности шаговый двигатель хорошо подходит для разомкнутой системы управления, в которой точное положение вала поддерживается с помощью точного количества импульсов без использования датчика обратной связи.
Чем меньше угол шага, тем больше будет количество шагов на оборот и выше будет точность полученного положения. Углы шага могут составлять от 90 градусов до 0,72 градуса, однако обычно используемые углы шага составляют 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, подаваемых на статор. Скорость вала или средняя скорость двигателя прямо пропорциональны частоте (частоте входных импульсов) входных импульсов, подаваемых на обмотки возбуждения. Следовательно, если частота низкая, шаговый двигатель вращается ступенчато, а при высокой частоте он непрерывно вращается, как двигатель постоянного тока, за счет инерции.
Как и все электродвигатели, имеет статор и ротор. Ротор представляет собой подвижную часть, не имеющую обмоток, щеток и коллектора. Обычно роторы бывают либо с переменным магнитным сопротивлением, либо с постоянными магнитами. Статор часто конструируется с многополюсными и многофазными обмотками, обычно из трех или четырех фазных обмоток, намотанных для необходимого количества полюсов, определяемого желаемым угловым смещением на входной импульс.
В отличие от других двигателей работает на запрограммированных дискретных управляющих импульсах, которые подаются на обмотки статора через электронный привод.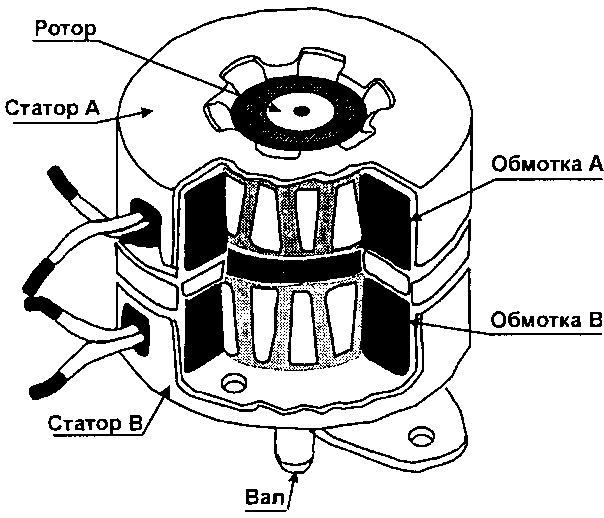 Вращение происходит за счет магнитного взаимодействия между полюсами последовательно возбуждаемой обмотки статора и полюсами ротора.
Вращение происходит за счет магнитного взаимодействия между полюсами последовательно возбуждаемой обмотки статора и полюсами ротора.
На современном рынке доступно несколько типов шаговых двигателей с широким диапазоном размеров, количества шагов, конструкции, проводки, зубчатой передачи и других электрических характеристик. Поскольку эти двигатели способны работать дискретно, они хорошо подходят для взаимодействия с цифровыми устройствами управления, такими как компьютеры.
Благодаря точному управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес в системах управления промышленными процессами, станках с ЧПУ, робототехнике, системах автоматизации производства и контрольно-измерительных приборах.
- Связанный пост: Бесщеточный двигатель постоянного тока — конструкция, принцип работы и применение
Типы шаговых двигателей
Существует три основных категории шаговых двигателей , а именно
- Шаговый двигатель с постоянными магнитами
- Шаговый двигатель с переменным сопротивлением
- Гибридный шаговый двигатель
Во всех этих двигателях обмотки возбуждения используются в статоре, где количество обмоток соответствует количеству фаз.
Постоянное напряжение подается для возбуждения катушек обмоток, и каждый вывод обмотки подключается к источнику через полупроводниковый переключатель. В зависимости от типа шагового двигателя конструкция его ротора может быть выполнена из мягкой стали с выступающими полюсами, цилиндрического ротора с постоянным магнитом и постоянного магнита с зубьями из мягкой стали. Поговорим об этих типах подробно.
- Вы также можете прочитать: Подключение трехфазного двигателя Звезда/треугольник (Y-Δ) Реверс/вперед с таймером питания и управления Диаграмма
Шаговый двигатель с переменным сопротивлением
Это базовый тип шагового двигателя , который существует уже давно и обеспечивает самый простой способ понять принцип работы с точки зрения конструкции. Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами (зубьями) статора и зубьями ротора.
Шаговый двигатель с переменным сопротивлениемКонструкция шагового двигателя с переменным сопротивлением
Состоит из обмотанного статора и многозубчатого ротора из мягкого железа.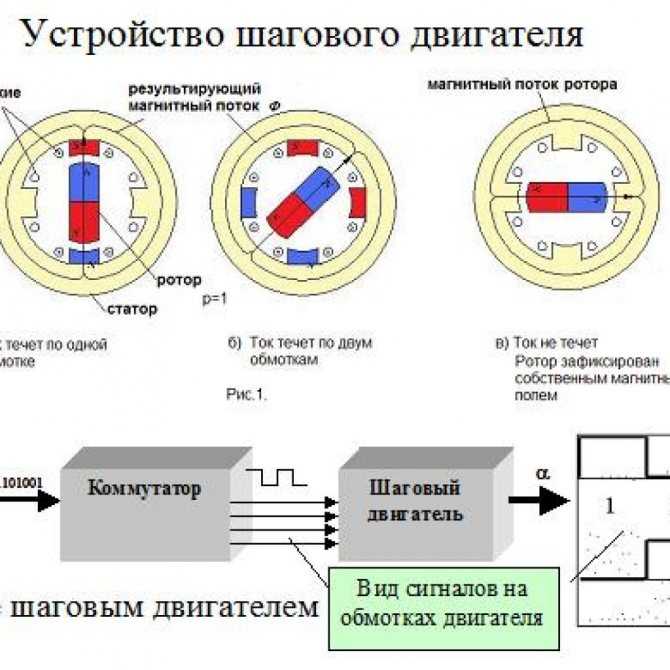 Статор имеет пакет пластин из кремнистой стали, на которые намотаны обмотки статора. Обычно он намотан на три фазы, распределенные между парами полюсов.
Статор имеет пакет пластин из кремнистой стали, на которые намотаны обмотки статора. Обычно он намотан на три фазы, распределенные между парами полюсов.
Число полюсов на сформированном статоре равно четному кратному числу фаз, обмотки которых намотаны на статоре. На рисунке ниже статор имеет 12 одинаково расположенных выступающих полюсов, каждый из которых намотан катушкой возбуждения. Эти три фазы питаются от источника постоянного тока с помощью полупроводниковых переключателей.
Ротор без обмоток, явнополюсный, полностью из стальных пластин с прорезями. Выступающие зубья полюса ротора имеют ту же ширину, что и зубья статора. Количество полюсов на статоре отличается от числа полюсов ротора, что обеспечивает возможность самозапуска и двунаправленного вращения двигателя.
Отношение полюсов ротора к полюсам статора для трехфазного шагового двигателя определяется как Nr = Ns ± (Ns / q). Здесь Ns = 12, а q = 3, и, следовательно, Nr = 12 ± (12/3) = 16 или 8. Ниже показан ротор 8-полюсной конструкции без какого-либо возбуждения.
Работа шагового двигателя с переменным сопротивлением
Шаговый двигатель работает по принципу , согласно которому ротор выравнивается в определенном положении с зубцами полюса возбуждения в магнитной цепи с минимальным сопротивлением путь есть. Всякий раз, когда к двигателю подается питание и возбуждается определенная обмотка, он создает свое магнитное поле и развивает свои собственные магнитные полюса.
Из-за остаточного магнетизма в магнитных полюсах ротора ротор перемещается в такое положение, чтобы достичь положения с минимальным магнитным сопротивлением, и, следовательно, один набор полюсов ротора совпадает с под напряжением набором полюсов статора. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора.
Когда ротор выровнен с полюсами статора, его магнитная сила достаточна, чтобы удерживать вал от перемещения в следующее положение по часовой стрелке или против часовой стрелки.
Рассмотрим принципиальную схему трехфазного двигателя с 6 полюсами статора и 4 зубьями ротора, показанную на рисунке ниже. Когда на фазу А-А’ подается постоянный ток путем замыкания переключателя -1, обмотка становится магнитом, в результате чего один зубец становится северным, а другой — южным. Таким образом, магнитная ось статора лежит вдоль этих полюсов.
Под действием силы притяжения катушка статора Северный полюс притягивает ближайший зубец ротора противоположной полярности, т. е. Южный и Южный полюс притягивают ближайший зубец ротора противоположной полярности, т. е. север. Затем ротор настраивается в положение минимального сопротивления, при котором магнитная ось ротора точно совпадает с магнитной осью статора.
Работа шагового двигателя с переменным сопротивлением Когда на фазу BB’ подается питание посредством замыкающего переключателя -2, при этом фаза A-A’ остается обесточенной посредством размыкающего переключателя-1, обмотка BB’ будет создавать магнитный поток и, следовательно, магнитная ось статора смещается вдоль образованных им таким образом полюсов. Следовательно, ротор смещается с наименьшим сопротивлением с намагниченными зубьями статора и поворачивается на угол 30 градусов по часовой стрелке.
Следовательно, ротор смещается с наименьшим сопротивлением с намагниченными зубьями статора и поворачивается на угол 30 градусов по часовой стрелке.
Когда на переключатель-3 подается питание после размыкания переключателя-2, включается фаза C-C’, зубья ротора выравниваются с новым положением, перемещаясь на дополнительный угол 30 градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора в определенной последовательности. Угол шага этого трехфазного шагового двигателя с 4-полюсными зубьями ротора выражается как 360/(4 × 3) = 30 градусов (так как угол шага = 360/Nr × q).
Угол шага можно дополнительно уменьшить за счет увеличения числа полюсов на статоре и роторе, в этом случае двигатели часто наматывают с дополнительными фазными обмотками. Это также может быть достигнуто за счет принятия различных конструкция шаговых двигателей , такая как многоуровневая компоновка и редукторный механизм.
- Вы также можете прочитать: Подключение трехфазного двигателя по схеме ЗВЕЗДА/ТРЕУГОЛЬНИК без таймера Схемы питания и управления
Шаговый двигатель с постоянными магнитами
Двигатель с постоянными магнитами, возможно, является наиболее распространенным среди нескольких типов шаговых двигателей. Как следует из названия, он добавляет в конструкцию двигателя постоянные магниты. Этот тип шаговых двигателей также упоминается как 9.0126 мотор-контейнер или мотор-контейнер . Основным преимуществом этого двигателя является его низкая стоимость изготовления. Этот тип двигателя имеет 48-24 шага на оборот.
Как следует из названия, он добавляет в конструкцию двигателя постоянные магниты. Этот тип шаговых двигателей также упоминается как 9.0126 мотор-контейнер или мотор-контейнер . Основным преимуществом этого двигателя является его низкая стоимость изготовления. Этот тип двигателя имеет 48-24 шага на оборот.
Конструкция Шаговый двигатель с постоянными магнитами
В этом двигателе статор является многополярным, и его конструкция аналогична конструкции шагового двигателя с переменным сопротивлением, как обсуждалось выше. Он состоит из щелевой периферии, на которую намотаны катушки статора. Он имеет выступающие полюса на щелевой конструкции, где намотанные обмотки могут быть двух-, трех- или четырехфазными.
Концевые выводы всех этих обмоток выкуплены и подключены к возбуждению постоянного тока через полупроводниковые переключатели в цепи привода.
Конструкция Шаговый двигатель с постоянными магнитами Ротор состоит из материала постоянного магнита, такого как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно он имеет гладкую цилиндрическую форму.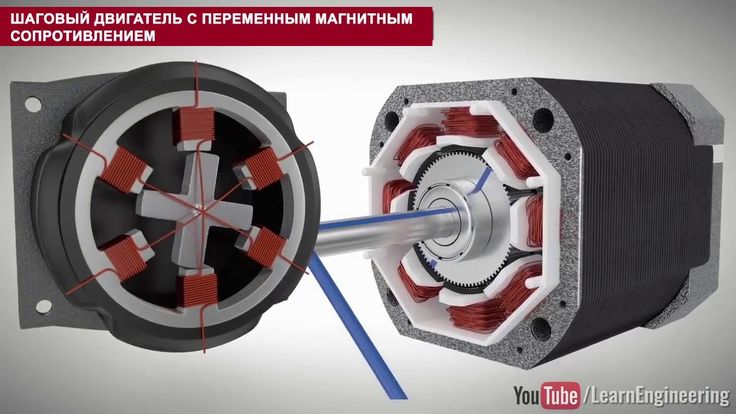 Ротор спроектирован так, чтобы иметь четное количество постоянных магнитных полюсов с чередующимися северной и южной полярностью.
Ротор спроектирован так, чтобы иметь четное количество постоянных магнитных полюсов с чередующимися северной и южной полярностью.
Работа шагового двигателя с постоянными магнитами
Работа этого двигателя основана на том, что разноименные полюса притягиваются друг к другу, а одноименные отталкиваются. Когда обмотки статора возбуждаются от источника постоянного тока, он создает магнитный поток и устанавливает северный и южный полюса. За счет силы притяжения и отталкивания между полюсами ротора с постоянными магнитами и полюсами статора ротор начинает перемещаться до положения, при котором на статор подаются импульсы.
Рассмотрим двухфазный шаговый двигатель с двумя полюсами ротора с постоянными магнитами, как показано на рисунке ниже.
Работа шагового двигателя с постоянными магнитами: Когда на фазу A подается положительное напряжение по отношению к A’, обмотки устанавливают северный и южный полюса. Из-за силы притяжения полюса ротора совпадают с полюсами статора, так что ось магнитного полюса ротора совмещается с осью магнитного полюса статора, как показано на рисунке.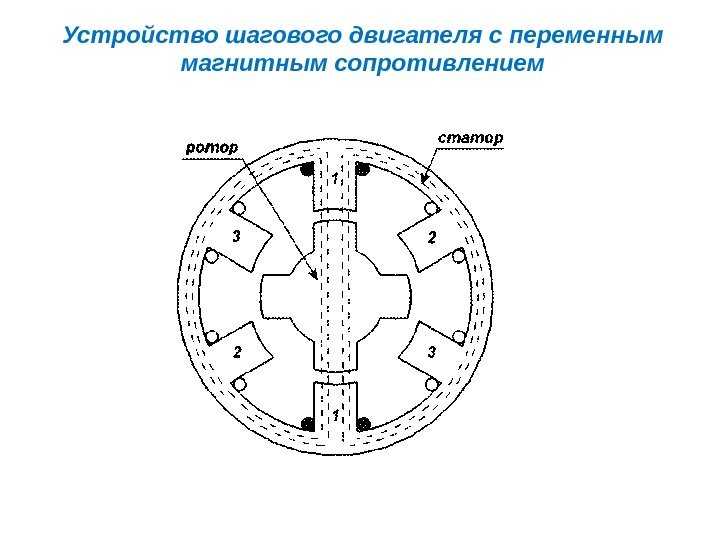
При переключении возбуждения на фазу В и выключении фазы А ротор дополнительно подстраивается под магнитную ось фазы В и таким образом поворачивается на 90 градусов по часовой стрелке.
Затем, если на фазу А подается отрицательный ток по отношению к А’, формирование полюсов статора заставляет ротор двигаться еще на 90 градусов по часовой стрелке.
Таким же образом, если фаза B возбуждается отрицательным током при замыкании переключателя фазы A, ротор поворачивается еще на 90 градусов в том же направлении. Далее, если фаза А возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов. Это означает, что всякий раз, когда статор возбуждается, ротор имеет тенденцию вращаться на 90 градусов по часовой стрелке.
Угол шага этого 2-фазного 2-полюсного двигателя с ротором на постоянных магнитах выражается как 360/(2 × 2) = 90 градусов. Размер шага может быть уменьшен за счет одновременной подачи питания на две фазы или последовательности режимов 1-фазного включения и 2-фазного включения с правильной полярностью.
- Вы также можете прочитать: Термины и определения, относящиеся к управлению и защите двигателя
Гибридный шаговый двигатель
Это самый популярный тип шагового двигателя , так как он обеспечивает лучшую производительность, чем ротор с постоянными магнитами, с точки зрения шагового разрешения, удерживающего момента и скорости. Однако эти двигатели дороже, чем шаговые двигатели с постоянными магнитами. Он сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в приложениях, требующих очень малого угла шага, например 1,5, 1,8 и 2,5 градуса.
Гибридный шаговый двигательКонструкция гибридного шагового двигателя
Статор этого двигателя такой же, как и его аналог с постоянным магнитом или реактивным двигателем. Катушки статора намотаны на чередующихся полюсах. При этом катушки разных фаз наматываются на каждый полюс, обычно две катушки на полюс, что называется бифилярным соединением.
Ротор состоит из постоянного магнита, который намагничивается в осевом направлении, образуя пару магнитных полюсов (полюса N и S). Каждый полюс покрыт равномерно расположенными зубьями. Зубья состоят из мягкой стали и двух секций, из которых на каждом полюсе смещены друг относительно друга на полшага зубьев.
- Связанный пост Почему мощность электродвигателей указана в кВт, а не в кВА?
Работа гибридного шагового двигателя
Работа этого двигателя аналогична работе шагового двигателя с постоянными магнитами. На рисунке выше показан 2-фазный, 4-полюсный, гибридный шаговый двигатель с 6-зубчатым ротором. Когда фаза A-A’ возбуждается источником постоянного тока, оставляя BB’ невозбужденным, ротор выравнивается таким образом, что южный полюс ротора обращен к северному полюсу статора, а северный полюс ротора обращен к южному полюсу статора.
Работа гибридного шагового двигателя Теперь, если возбуждена фаза B-B’, удерживая A-A’ выключенным таким образом, что верхний полюс становится северным, а нижний — южным, тогда ротор выровняется в новое положение на двигаясь против часовой стрелки. Если фаза B-B’ возбуждена противоположно, так что верхний полюс становится южным, а нижний становится северным, то ротор будет вращаться по часовой стрелке.
Если фаза B-B’ возбуждена противоположно, так что верхний полюс становится южным, а нижний становится северным, то ротор будет вращаться по часовой стрелке.
При правильной последовательности импульсов на статоре двигатель будет вращаться в нужном направлении. При каждом возбуждении ротор будет блокироваться в новом положении, и даже если возбуждение будет удалено, двигатель все еще сохраняет свое заблокированное состояние из-за возбуждения от постоянного магнита. Угол шага этого 2-фазного, 4-полюсного, 6-зубчатого роторного двигателя равен 360/(2 × 6) = 30 градусов. На практике гибридные двигатели конструируются с большим количеством полюсов ротора, чтобы получить высокое угловое разрешение.
- Связанный пост: Что такое КПД двигателя и как его повысить?
Униполярные и биполярные шаговые двигатели
Вышеуказанные двигатели могут быть униполярными или биполярными в зависимости от схемы обмотки катушки. Униполярный двигатель используется с двумя обмотками на фазу, и, следовательно, направление тока, протекающего через эти обмотки, изменяет вращение двигателя. В этой конфигурации ток протекает в одном направлении в одной катушке и в противоположном направлении в другой катушке.
В этой конфигурации ток протекает в одном направлении в одной катушке и в противоположном направлении в другой катушке.
На рисунке ниже показан двухфазный униполярный шаговый двигатель, в котором катушки A и C предназначены для одной фазы, а B и D — для другой фазы. В каждой фазе каждая катушка несет ток в направлении, противоположном направлению другой катушки. Только одна катушка будет проводить ток в каждый момент времени в каждой фазе для достижения определенного направления вращения. Таким образом, просто переключая клеммы на каждую катушку, можно контролировать направление вращения.
Работа двухфазного униполярного шагового двигателяВ случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не из двух в случае униполярного. При этом направление вращения контролируется реверсированием тока через обмотки. Следовательно, для реверсирования тока требуется сложная схема привода.
Двухфазный биполярный шаговый двигатель- Вы также можете прочитать: Что такое соленоид и магнитное поле соленоида
Шаговые режимы шагового двигателя
Типичное шаговое действие заставляет двигатель проходить последовательность положений равновесия в ответ на подаваемые на него импульсы тока. Шаговое действие можно изменять по-разному, просто изменяя последовательность подачи питания на обмотки статора. Ниже приведены наиболее распространенные режимы работы или вождения шаговых двигателей.
Шаговое действие можно изменять по-разному, просто изменяя последовательность подачи питания на обмотки статора. Ниже приведены наиболее распространенные режимы работы или вождения шаговых двигателей.
- Шаг волны
- Полный шаг
- Полушаг
- Микрошаг
Ступенчатый волновой режим
Ступенчатый волновой режим является самым простым из всех других режимов, в котором только одна обмотка находится под напряжением в любой момент времени. Каждая катушка фазы подключается к питанию попеременно. В таблице ниже показан порядок подачи питания на катушки в 4-фазном шаговом двигателе.
В этом режиме двигатель дает максимальный угол шага по сравнению со всеми другими режимами. Это самый простой и наиболее часто используемый способ степпинга; однако создаваемый крутящий момент меньше, поскольку он использует некоторую часть общей обмотки в данный момент времени.
Полношаговый режим
В этом приводе или режиме две фазы статора находятся под напряжением одновременно в любой момент времени. Когда две фазы находятся под напряжением вместе, ротор будет испытывать крутящий момент от обеих фаз и придет в положение равновесия, которое будет чередоваться между двумя соседними положениями ступеней волны или однофазными возбуждениями. Таким образом, этот шаг обеспечивает лучший удерживающий момент, чем волновой шаг. В таблице ниже показан полный шаговый привод для 4-фазного шагового двигателя.
Полушаговый режим
Это комбинация режимов волны и полного шага. При этом однофазное и двухфазное возбуждения осуществляются попеременно, т. е. однофазное включение, двухфазное включение и т. д. Угол шага в этом режиме становится половиной полного угла шага. Этот режим движения имеет самый высокий крутящий момент и стабильность по сравнению со всеми другими режимами. Таблица, содержащая последовательность импульсов фаз для 4-фазного двигателя в полушаге, приведена ниже.
Микрошаговый режим
В этом режиме каждый шаг двигателя подразделяется на несколько небольших шагов, даже сотни фиксированных положений, поэтому достигается большее разрешение позиционирования. При этом токи через обмотки постоянно меняются, чтобы получить очень маленькие ступени. При этом две фазы возбуждаются одновременно, но с неравными токами в каждой фазе.
Например, ток в фазе -1 поддерживается постоянным, в то время как ток в фазе 2 увеличивается ступенчато до максимального значения тока, независимо от того, положительное оно или отрицательное. Затем ток в фазе-1 постепенно уменьшается или увеличивается до нуля. Таким образом, двигатель будет производить небольшой размер шага.
Все эти режимы шагового двигателя могут быть получены каждым типом шагового двигателя, рассмотренным выше. Однако направление тока в каждой обмотке на этих этапах может варьироваться в зависимости от типа двигателя и быть однополярным или двухполярным.
- Связанный пост Расчет размера кабеля для двигателей LT и HT
Преимущества шагового двигателя
- В состоянии покоя двигатель имеет полный крутящий момент.
 Независимо от того, нет ли момента или изменения положения.
Независимо от того, нет ли момента или изменения положения. - Хорошо реагирует на пуск, остановку и положение заднего хода.
- Поскольку в шаговом двигателе нет контактных щеток, он надежен, а ожидаемый срок службы зависит от подшипников двигателя.
- Угол поворота двигателя прямо пропорционален входным сигналам.
- Это простое и менее затратное управление, поскольку двигатель обеспечивает управление без обратной связи при реагировании на цифровые входные сигналы.
- Скорость двигателя прямо пропорциональна частоте входных импульсов, таким образом можно достичь широкого диапазона скорости вращения.
- Когда нагрузка соединена с валом, все еще возможно реализовать синхронное вращение с низкой скоростью.
- Точное позиционирование и повторяемость движения хорошие, так как точность шага составляет 3-5%, при этом ошибка не накапливается от одного шага к другому. Шаговые двигатели
- более безопасны и недороги (по сравнению с серводвигателями), имеют высокий крутящий момент на низких скоростях, высокую надежность и простую конструкцию, которая работает в любых условиях.
Недостатки шаговых двигателей
- Шаговые двигатели с низким КПД.
- Низкая точность.
- Его крутящий момент очень быстро падает со скоростью.
- Поскольку шаговый двигатель работает в режиме управления без обратной связи, нет обратной связи, указывающей на возможные пропущенные шаги.
- Он имеет низкое отношение крутящего момента к моменту инерции, что означает, что он не может очень быстро разгонять груз.
- Они шумные.
Применение шаговых двигателей
- Шаговые двигатели используются в автоматизированном производственном оборудовании и автомобильных датчиках, а также в промышленных машинах, таких как упаковка, маркировка, наполнение и резка и т. д.
- Он широко используется в устройствах безопасности, таких как камеры безопасности и наблюдения.
- В медицинской промышленности шаговые двигатели широко используются в образцах, цифровой стоматологической фотографии, респираторах, жидкостных насосах, машинах для анализа крови, медицинских сканерах и т.

