Как работают шаговые электродвигатели. Какие бывают виды шаговых двигателей. Где применяются шаговые электродвигатели. Каковы преимущества и недостатки шаговых двигателей.
Что такое шаговый электродвигатель и как он работает
Шаговый электродвигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные угловые перемещения (шаги) ротора. В отличие от обычных электродвигателей, вал шагового двигателя вращается не непрерывно, а поворачивается на фиксированный угол при подаче каждого управляющего импульса.
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора. Статор содержит несколько обмоток, которые при подаче на них напряжения создают магнитное поле. Ротор представляет собой постоянный магнит или зубчатый сердечник из магнитомягкого материала. При последовательном переключении обмоток статора магнитное поле вращается, увлекая за собой ротор.
Основные виды шаговых электродвигателей
По конструкции ротора выделяют следующие основные типы шаговых двигателей:

- С постоянными магнитами — ротор выполнен в виде цилиндрического постоянного магнита
- С переменным магнитным сопротивлением — ротор имеет зубчатую форму и изготовлен из магнитомягкого материала
- Гибридные — сочетают особенности первых двух типов
По способу управления обмотками различают:
- Униполярные — обмотки подключаются к источнику питания одной полярности
- Биполярные — для управления используется напряжение обеих полярностей
Как устроен шаговый электродвигатель
Конструкция шагового двигателя включает следующие основные элементы:
- Статор с обмотками возбуждения
- Ротор (якорь) с постоянными магнитами или зубчатой поверхностью
- Подшипниковые щиты
- Корпус
- Вал
Количество полюсов статора и зубцов ротора определяет величину шага двигателя. Чем больше полюсов и зубцов, тем меньше угол поворота на один шаг и выше точность позиционирования.
Принцип работы шагового электродвигателя
Работа шагового двигателя основана на следующем принципе:
- При подаче напряжения на одну из обмоток статора создается магнитное поле
- Ротор стремится занять положение, при котором магнитный поток будет максимальным
- Ротор поворачивается и фиксируется в новом положении
- При переключении обмоток магнитное поле смещается
- Ротор совершает очередной шаг, следуя за полем статора
Таким образом, последовательно переключая обмотки, можно вращать ротор на заданный угол в любом направлении.

Характеристики шаговых электродвигателей
Основными характеристиками шаговых двигателей являются:
- Величина шага — угол поворота ротора за один такт управляющих импульсов
- Точность позиционирования — отклонение фактического положения от заданного
- Момент удержания — максимальный момент, который можно приложить к ротору, не вызывая его вращения
- Рабочий момент — зависимость между моментом и скоростью вращения
- Максимальная частота приемистости — наибольшая частота импульсов, при которой двигатель работает без пропуска шагов
Преимущества и недостатки шаговых электродвигателей
К основным достоинствам шаговых двигателей относятся:
- Высокая точность позиционирования без обратной связи
- Фиксация ротора в заданном положении
- Высокий момент на низких скоростях
- Быстрый старт/остановка/реверс
- Высокая надежность (отсутствие щеток)
- Однозначная зависимость положения от входных импульсов
Недостатками являются:
- Возможность потери позиции при перегрузках
- Невысокая эффективность
- Сложная схема управления
- Возможность возникновения резонанса
- Дискретность перемещений
Области применения шаговых электродвигателей
Шаговые двигатели широко используются в устройствах, требующих точного позиционирования и малых перемещений:

- Станки с ЧПУ
- 3D-принтеры
- Роботы и манипуляторы
- Автоматические линии
- Офисная техника (принтеры, сканеры)
- Приводы жестких дисков
- Автомобильная электроника
- Системы видеонаблюдения
- Медицинское оборудование
Управление шаговым электродвигателем
Для управления шаговым двигателем необходимы следующие компоненты:
- Источник питания
- Драйвер (силовой преобразователь)
- Контроллер (генератор управляющих импульсов)
Драйвер преобразует управляющие сигналы контроллера в силовые импульсы, подаваемые на обмотки двигателя. Существуют различные алгоритмы управления шаговыми двигателями:
- Полношаговый режим
- Полушаговый режим
- Микрошаговый режим
- Векторное управление
Выбор режима зависит от требуемых характеристик привода — точности, плавности хода, уровня вибраций и шума.
Как выбрать шаговый электродвигатель
При выборе шагового двигателя следует учитывать следующие параметры:
- Требуемый крутящий момент
- Скорость вращения
- Точность позиционирования
- Величина шага
- Напряжение питания
- Габариты и масса
- Условия эксплуатации
Важно правильно согласовать характеристики двигателя, нагрузки и системы управления. Для оптимального выбора рекомендуется проконсультироваться со специалистами.

Перспективы развития шаговых электродвигателей
Основные направления совершенствования шаговых двигателей:
- Повышение удельной мощности
- Улучшение динамических характеристик
- Снижение уровня вибраций и шума
- Интеграция с цифровыми системами управления
- Разработка гибридных конструкций
- Применение новых магнитных материалов
Развитие технологий производства и управления позволит расширить области применения шаговых двигателей и улучшить их эксплуатационные характеристики.
принцип действия, виды, режимы работы
Содержание
- 1 Принцип действия шаговых двигателей, разновидности
- 2 Режимы работы шаговых двигателей
- 3 Шаговые двигатели на постоянном магните
- 4 Гибридные синхронные двигатели
- 5 Вентильные шаговые двигатели
- 6 Шаговые двигатели Лавета
- 7 Параметры шаговых двигателей
- 8 Разновидности драйверов шаговых двигателей
Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом.
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе.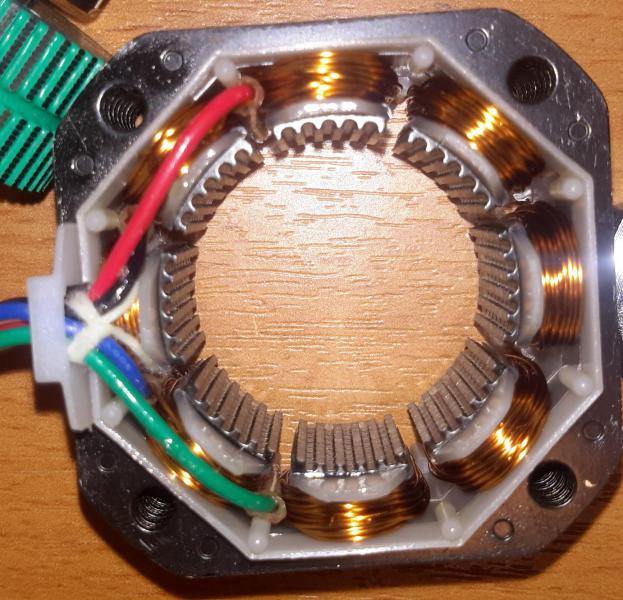 Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности). В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз.
Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
- Унифилярные:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
- Бифилярные:
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Каждая обмотка способна образовывать несколько полюсов.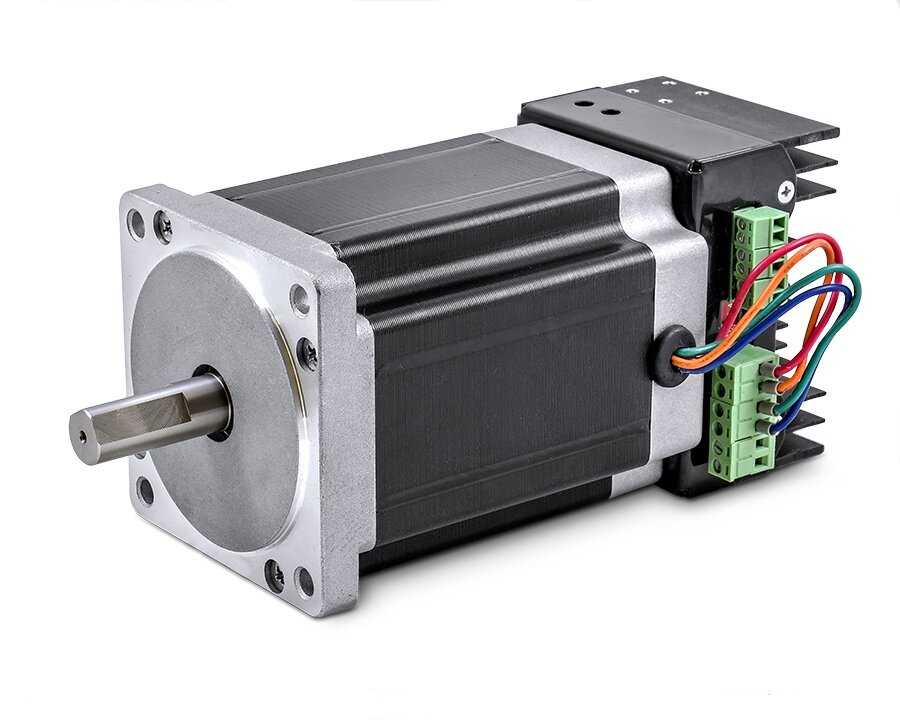 Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Режимы работы шаговых двигателей
Изделия функционируют в нескольких режимах:
- Полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
- В режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. Получается, на зуб действуют одновременно два полюса. Вал замирает, фиксируя промежуточное положение. Потом первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.
Электрический синхронный мотор
- Микрошаговые режимы считаются искусными ноу-хау наработками конкретных производителей.
 Режимом заправляет специальный чип, генерирующий управляющие напряжения, чтобы точность позиционирования вала находилась в районе сотой шага (20000 перемещений на 1 оборот). Подобные изыски нужны микроэлектронике, не исключено возникновение потребности тонких технических решениях среди промышленных конвейеров. Драйвер генерирует 50 с лишним тысяч циклов управляющих напряжений на оборот.
Режимом заправляет специальный чип, генерирующий управляющие напряжения, чтобы точность позиционирования вала находилась в районе сотой шага (20000 перемещений на 1 оборот). Подобные изыски нужны микроэлектронике, не исключено возникновение потребности тонких технических решениях среди промышленных конвейеров. Драйвер генерирует 50 с лишним тысяч циклов управляющих напряжений на оборот.
Шаговые двигатели на постоянном магните
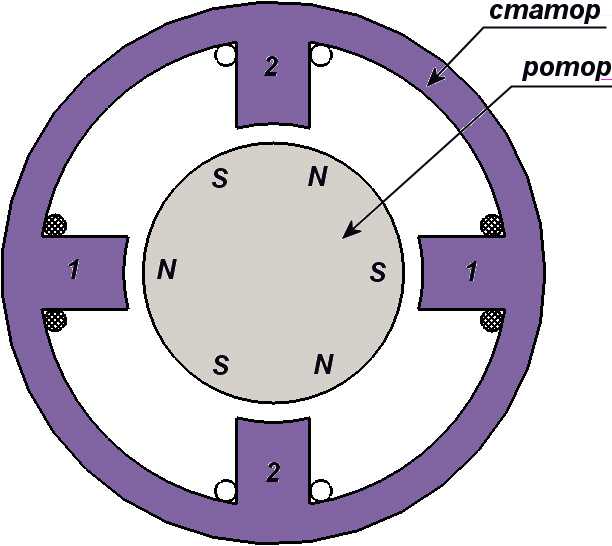
Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности.
Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало.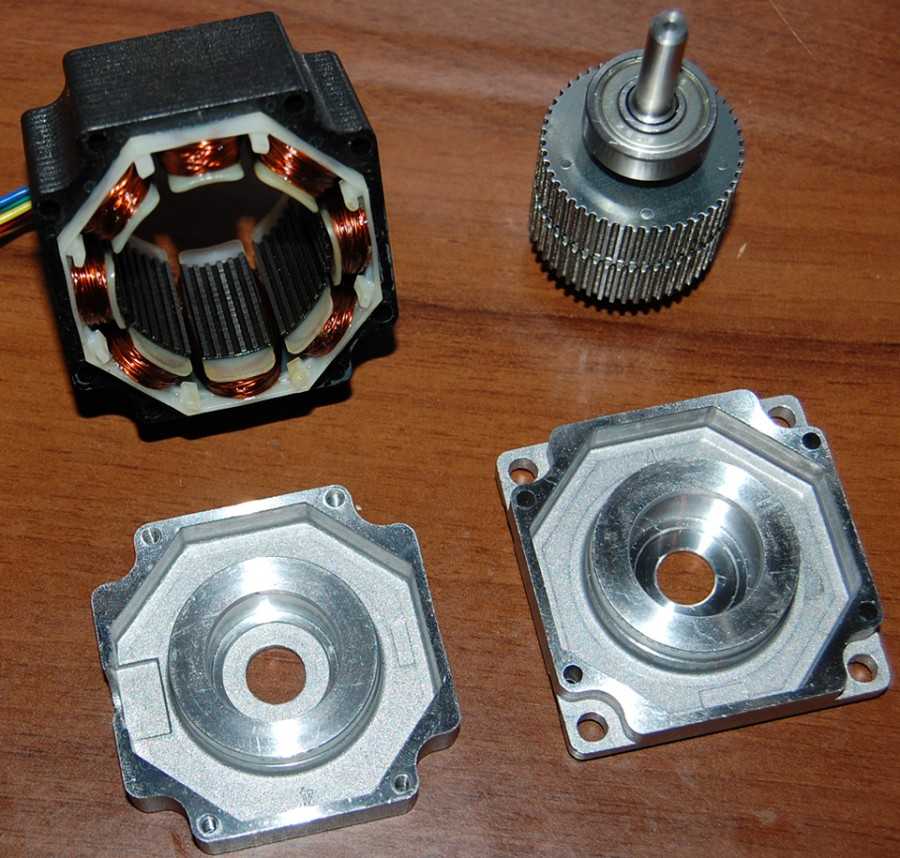 Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера).
Двигатель с постоянным магнитом
Гибридные синхронные двигатели
Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения:
- 0,9 градуса (400 шагов/оборот).
- 3,6 градуса (100 шагов/оборот).
Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов.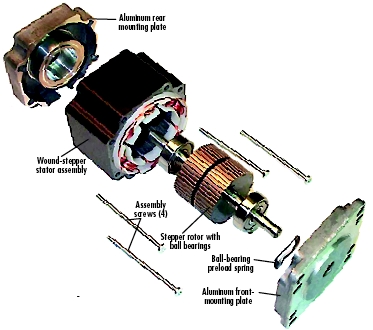 Название устройства получили именем изобретателя – инженера Мариуса Лавета.
Название устройства получили именем изобретателя – инженера Мариуса Лавета.
Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность.
 Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков. - Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
Разновидности драйверов шаговых двигателей
В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями:
- Униполярные формируют импульсы тока одного направления.
 Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям.
Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям. - Драйверы с гасящими резисторами сегодня считаются устаревшими. Позволяют выжать из двигателя максимум скорости. Большое количество энергии выделяется теплом на гасящих резисторах.
- Биполярные драйверы популярны сегодня. Игнорируя сложность конструкции, достигается высокая эффективность. Каждый драйвер содержит формирующий блок, составленный четырьмя транзисторами. Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
Принцип работы шагового электродвигателя
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость. По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов.
Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость. По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели. Принцип работы и управление.
- Шаговый электродвигатель
- Гибридный шаговый двигатель принцип работы
- Шаговый двигатель — принцип работы
- Шаговые двигатели: виды, принцип работы, система управления
- Принцип работы и разновидности биполярного шагового двигателя
- Шаговый двигатель
- Шаговый двигатель
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Тест работы шагового двигателя для балансира
Шаговые двигатели. Принцип работы и управление.
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы.
Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название.
Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент.
Эти элементы необходимы для передачи и преобразования угла вращения.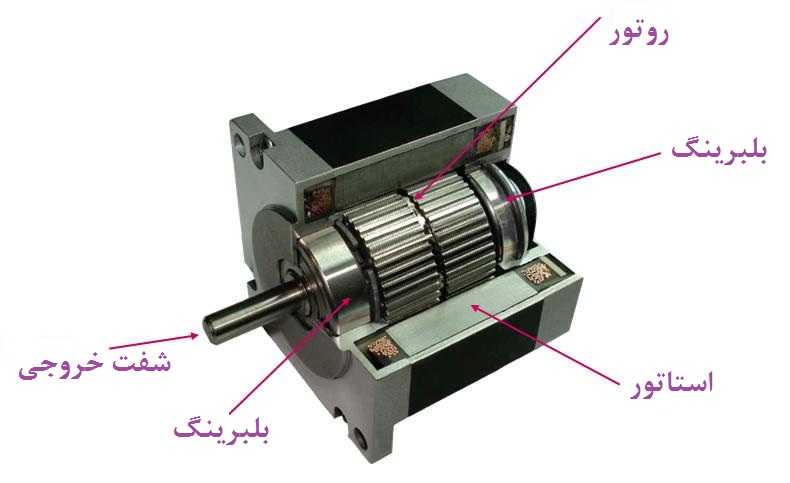 В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей. Содержание: Как устроен шаговый двигатель Принцип действия Виды и типы по полярности или типу обмоток Типы двигателей по конструкции ротора Управление ШД Достоинства и недостатки шаговых электродвигателей. По своему типу это бесколлекторный синхронный электродвигатель.
В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей. Содержание: Как устроен шаговый двигатель Принцип действия Виды и типы по полярности или типу обмоток Типы двигателей по конструкции ротора Управление ШД Достоинства и недостатки шаговых электродвигателей. По своему типу это бесколлекторный синхронный электродвигатель.
Состоит из статора и ротора. На статоре расположены обмотки, в виде отдельных катушек. Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля.
Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения например, при механических нагрузках на вал. Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. Этот угол и будет шагом поворота ротора. Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В.
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. Этот угол и будет шагом поворота ротора. Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В.
Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения.
При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки. В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. Тем самым обеспечивается вращение ротора. Униполярные электромоторы гораздо более удобны в управлении. ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске.
Количество полюсов в современных моторах доходит до Электромоторы с переменным магнитным сопротивлением. Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело.
В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов.
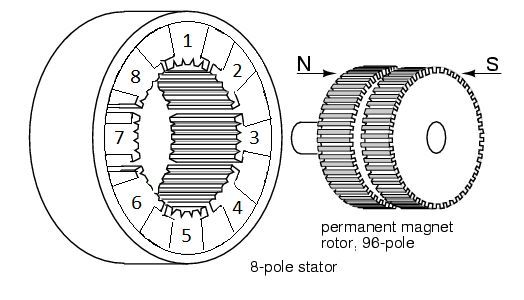
Самым важным плюсом является высокая точность работы устройства.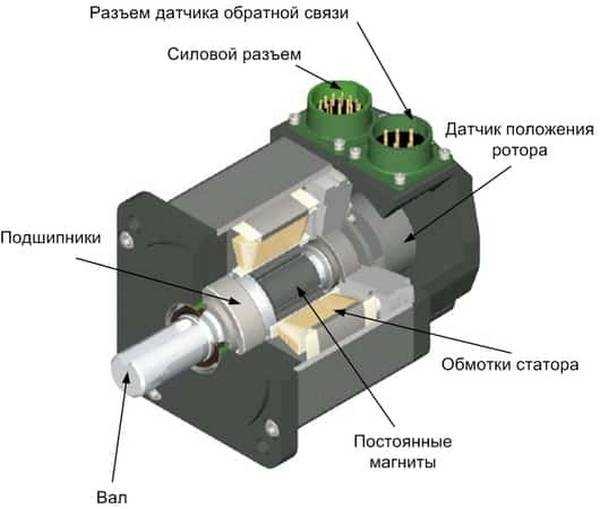 Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы. Для примера в ШД на шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот.
Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы. Для примера в ШД на шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот.
Благодаря этому у ротора есть полюсов с обратной полярностью. То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме А смещение фаз на четверть дает еще позиций, производится это за счет последовательного возбуждения.
Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах.
Главным конкурентом шагового двигателя является сервопривод , но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.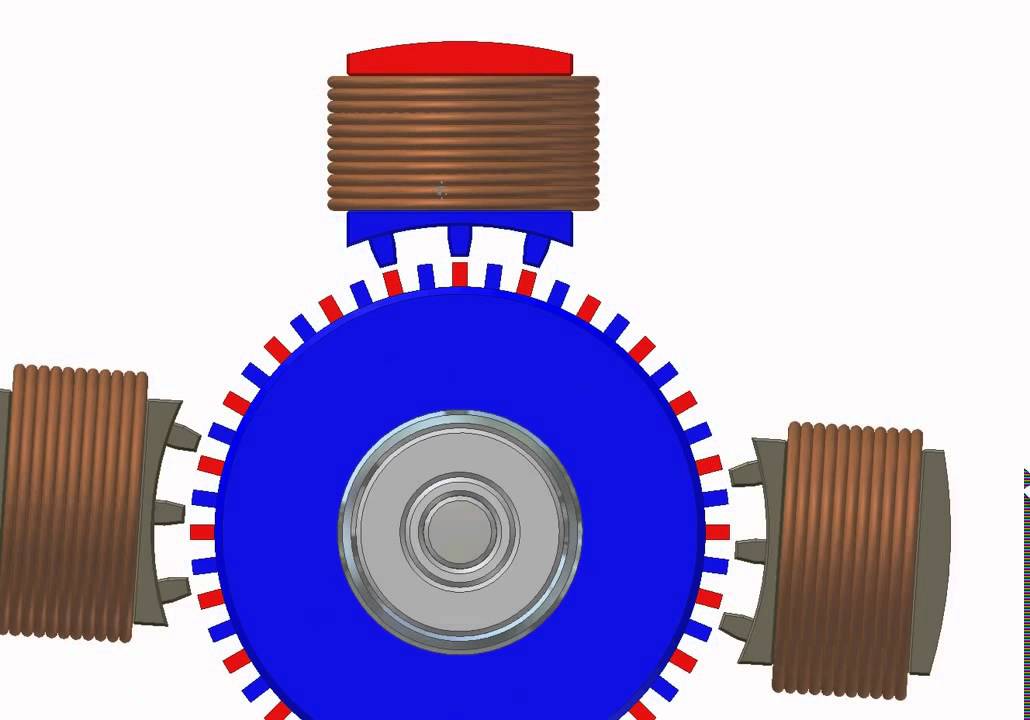
Ваш e-mail не будет опубликован. Вы здесь: Главная Электрооборудование Электродвигатели. Автор: Алексей Бартош. Что такое шаговый двигатель, зачем он нужен и как работает. Опубликовано: Добавить комментарий Отменить ответ Ваш e-mail не будет опубликован. Другие статьи по теме Что такое сервопривод и как он работает.
Шаговый электродвигатель
Рабочие органы ряда механизмов при выполнении ими производственных операций должны перемещаться дискретно, шагами. К таким механизмам относятся киносъемочная и проекционная аппаратура, приборы времени, механизмы подач различных станков, устройства перемещения валков прокатных станов и многие другие. Для привода этих рабочих органов целесообразно, очевидно, применять двигатель, способный по своему принципу действия обеспечить подобное дискретное движение. Таким двигателем является шаговый двигатель, ротор которого совершает шаговые перемещения определенной величины с фиксацией положения ротора в конце каждого шага. Широкое распространение шагового электропривода определяется еще и тем обстоятельством, что он хорошо сочетается с цифровыми вычислительными машинами, программными устройствами и различными цифровыми управляющими приборами, которые все шире применяются во многих отраслях техники.
Принцип действия простейшего однофазного шагового двигателя. Двухполюсный ротор из магнитомягкой стали с клювообразными выступами .
Гибридный шаговый двигатель принцип работы
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Интересные факты , Начинающим электрикам Количество просмотров: Комментарии к статье: 0. Шаговые электродвигатели. Сравнительно недавно термин «шаговый двигатель» был известен только узкому кругу инженеров-электриков. Теперь же шаговые двигатели получили почетное право называться лишь своими «инициалами» — ШД свидетельство широкого распространения электрических машин такого типа.
Шаговый двигатель — принцип работы
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов это обеспечивается благодаря контроллеру. Главное его отличие от моторов других типов — отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления приборной панелью , передатчиками и сигнализаторами.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов это обеспечивается благодаря контроллеру. Главное его отличие от моторов других типов — отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления приборной панелью , передатчиками и сигнализаторами.
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Шаговые двигатели: виды, принцип работы, система управления
Шаговый электродвигатель относится к виду электрических машин постоянного тока. Принцип действия шагового электродвигателя основан на способе преобразования импульсной электрической энергии в механическое дискретное перемещение. Шаговые электродвигатели классифицируются как бесколлекторные двигатели с высокой степенью надежности и большим сроком службы. Особенности этого типа электродвигателей делают их пригодными к эксплуатации даже в самых сложных производственных условиях. Отличительной особенностью шаговых двигателей является большое значение крутящего момента на низких скоростях, в то время как в коллекторных двигателях значение крутящего момента возрастает только при увеличении скорости.
Отличительной особенностью шаговых двигателей является большое значение крутящего момента на низких скоростях, в то время как в коллекторных двигателях значение крутящего момента возрастает только при увеличении скорости.
Принцип работы и разновидности биполярного шагового двигателя
Шаговый двигатель — принцип работы Чтобы тот или иной электрический прибор работал, ему требуется специальный приводной механизм. Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется. Я постараюсь как можно проще объяснить, как работает шаговый двигатель. Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема LN.
Шаговые электродвигатели Чтобы понять, как работает шаговый двигатель, вспомним принцип действия других электрических машин, например.
Шаговый двигатель
Шаговые двигатели — представляют собой электромеханические устройства, которые способны преобразовывать сигналы внешнего управления в угловое либо же линейное движение ротора электродвигателя с полной его фиксацией в определённом месте нахождения без использования устройств работающих по принципу обратной связи. Нынешние шаговые двигатели электродвигатели по сути своей являются обычными синхронными электрическими двигателями без стартовой обмотки, что обычно располагается на роторе движка. Это обуславливается не асинхронным, а частотным запуском шагового двигателя.
Нынешние шаговые двигатели электродвигатели по сути своей являются обычными синхронными электрическими двигателями без стартовой обмотки, что обычно располагается на роторе движка. Это обуславливается не асинхронным, а частотным запуском шагового двигателя.
Шаговый двигатель
ВИДЕО ПО ТЕМЕ: Шаговый Двигатель ( Stepper motor )
Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования. Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный.
Электропривод, обеспечивающий преобразование числовой информации в дискретные механические положения называется шаговым. Электродвигатель с таким приводом работает от импульсных команд.
Электродвигатель с таким приводом работает от импульсных команд.
Шаговые электродвигатели ШД с электронной схемой управления, называемые дискретным приводом [2], появились в х годах. До этого шаговые электродвигатели применялись в исполнительных устройствах дистанционных передач с механическим коллекторным коммутатором [7]. Развитие электроники и полупроводниковой техники позволило создать малогабаритные и надежные схемы электронных коммутаторов для управления скоростью ШД. Это предопределило применение ШД в автоматическом приводе и системах управления. В настоящей работе рассматриваются исполнительные устройства с синхронными шаговыми электродвигателями. Машины с кинематической связью между ротором и статором имеют существенно меньшие быстродействие и срок службы. Шаговый электродвигатель совместно с коммутатором для управления следует отнести к системам частотного регулирования синхронного электродвигателя с возможностью изменения частоты до нуля.
Для корректной работы сайта необходимо включить поддержку JavaScript. Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования. Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение.
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования. Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение.
Шаговый двигатель принцип работы для чайников
Шаговый двигатель Arduino предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим устройство и схему подключения шагового двигателя. Шаговый двигатель stepper motor предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Подключение шагового двигателя к Ардуино
- Шаговый электродвигатель
- Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя
- Что такое шаговый двигатель, в чем его преимущества? Шагового двигателя
- Primary Menu
- Шаговый двигатель
- Шаговые двигатели
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Принцип работы шагового двигателя
Подключение шагового двигателя к Ардуино
Шаговый двигатель представляет собой электромеханическое устройство, преобразующее электроимпульс в дискретное механическое перемещение.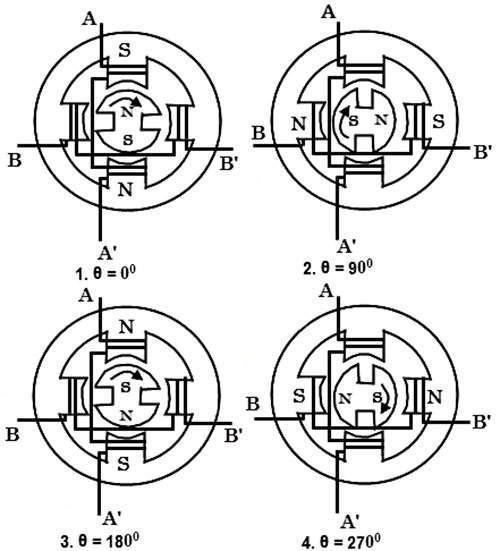
Данный механизм практически ничем не отличается от других электрических моторов. Зачастую в устройство данной детали входит контроллер шагового двигателя, вал и выводы. Все это объединяется в большой круглый реже прямоугольный корпус. Шаговый двигатель может применяться в самых разнообразных отраслях.
Чаще всего такие моторы встречаются на промышленном оборудовании и в электронных офисных приборах, таких как факсы, принтеры и дисководы. Сейчас производится несколько типов данных двигателей, поэтому чтобы он корректно работал, к каждому механизму необходимо подобрать свою схему и принцип работы драйвера.
Во-первых, шаговый двигатель очень надежен в эксплуатации. Это объясняется тем, что в его конструкции нет графитных щеток, которые часто применяются в автомобильных генераторах и имеют малый срок службы.
Управление шаговым двигателем осуществляют подшипники, поэтому сколько они будут работать, столько будет исправным мотор. Во-вторых, данному механизму свойственно позиционирование без обратной связи.
Это достигается за счет зависимости положения детали от входных импульсов. В-третьих, шаговый двигатель является одним из немногих устройств, которые обеспечивают быстрый запуск, остановку и реверсирование всей системы. При этом мотор обеспечивает полный момент в режиме остановки. Также этому мотору свойственны прецизионная повторяемость и позиционирование.
Современные двигатели работают с точностью до процентов величины шага, причем погрешность не накапливается во время их работы от шага к шагу. Минусов у этого устройства тоже много, однако меньше чем преимуществ. Из основных недостатков следует отметить тот факт, что данным двигателям свойственно явление резонанса. Также они могут потерять контроль положения ввиду работы без обратной связи.
На высоких скоростях шаговый двигатель не очень производительный, хотя и в нормальном режиме работы он не отличается своей мощностью. Кстати, даже не находясь под нагрузкой, все равно он поглощает электроэнергию, причем в том самом количестве, что и ранее при работе. Из-за сложной схемы управления данное устройство трудно отремонтировать самостоятельно. Не стоит путать эти два механизма. Несмотря на то что оба имеют похожее устройство и принцип работы, во многом они отличаются между собой.
Из-за сложной схемы управления данное устройство трудно отремонтировать самостоятельно. Не стоит путать эти два механизма. Несмотря на то что оба имеют похожее устройство и принцип работы, во многом они отличаются между собой.
Главное их различие заключается в том, что шаговый мотор может обеспечить 1 оборот ротора за энное количество шагов. При этом данное устройство отличается своей плавностью и синхронностью вращения. Серводвигатели имеют в своей конструкции специальные датчики обратной связи, определяющие скорость и положение устройства для системы управления.
В качестве нее здесь предусматривается резольвер или энкодер. Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер. Шаговый двигатель — это синхронное электромеханическое устройство, которое передает сигнал управления в механическое движения ротора.
Вращение происходит шагами, которые фиксируются в определенном положении. При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала. Вал сдвигается под фиксированным углом с каждым импульсом. Если вокруг центрального куска железа зубчатой формы расположены несколько зубчатых электромагнитов, то устройства с таким редуктором достаточно эффективны.
Микроконтроллер возбуждает электромагниты. Один зубчатый электромагнит под воздействием энергии притягивает зубья зубчатого колеса к своей поверхности, таким образом, вал двигателя делает поворот. Когда зубья выровнены по отношению к электромагниту, они немного смещаются к соседней магнитной детали. Чтобы шестеренка начала вращение и выровнялась с предыдущим колесом, первый электромагнит отключается, а следующий включается.
Затем весь процесс повторяется столько раз, сколько необходимо. Такое вращение называют постоянным шагом. Подсчитав количество шагов при полном обороте двигателя, определяется скорость его вращения. Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный. Изменять расположение магнитных полюсов можно, не меняя при этом направленность тока. Достаточно включить отдельно каждую фазу обмотки.
Устройство состоит из одной обмотки на фазу с расположенным в центре ответвлением. У таких двигателей на фазу приходится одна обмотка, нет общего вывода, а есть два — на фазу. Благодаря этому биполярные устройства обладают наибольшей мощностью, чем униполярные. Для изменения магнитных полярностей полюсов, в обмотке изменяют направления тока. Чтобы уменьшить угол шага, был разработан гибридный шаговый двигатель.
В свою конструкцию, он включает лучшие свойства двигателя с постоянными магнитами и реактивного двигателя. Ротор представлен в виде намагниченного вдоль продольной оси цилиндрического магнита. Статор состоит из двух или четырех фаз, которые размещены между парами явно выраженных полюсов. Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе.
Статор состоит из двух или четырех фаз, которые размещены между парами явно выраженных полюсов. Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе.
Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему. Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN включающей в себя комплект составных ключей.
Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты. Устройство может работать в трех режимах:.
В области электротехники и механики шаговый электродвигатель считается сложным устройством, которое включает в себя множество механических и электрических возможностей. На практике применяются следующие технические характеристики:.
Все коммутации производятся внешними схемами. Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода см.
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора. Шаговые двигатели имеют широкий диапазон угловых разрешений. Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки.
При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения. Для примера приведем двуполюсный трехфазный шаговый двигатель.
Для многополюсной машины величина углового шага ротора равна:. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов. Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Индукторные гибридные шаговые двигатели. Это позволяет упростить кинематическую схему различных электроприводов. Подмагничивание магнитопроводов производится постоянным магнитом. В линейных шаговых двигателях применяют магнито-воздушную подвеску.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
Она является основным показателем переходного режима шагового двигателя. Существует отдельный вид электродвигателей, которые относятся к разряду исполнительных, дискретного действия. Это шаговый двигатель, принцип работы которого основан на воздействии импульсов на ротор, благодаря чему происходит его перемещение под определенным углом, составляющим шаг. Эти двигатели используются в автоматизированных системах управления.
Эти двигатели используются в автоматизированных системах управления.
Они сохраняют синхронность в любом положении: при пуске, торможении, вращении или реверсе. При прохождении по обмоткам управления постоянного тока допускается фиксированная длительная стоянка ротора.
Шаговые двигатели используются для питания электронные коммутаторы, управление которыми осуществляется с помощью маломощных импульсов. Когда по управляющим обмоткам статора происходит прохождение токов, то в это время в роторе развивается синхронизирующий момент, производящий его максимальное перемещение.
При взаимодействии магнитных полей статора и ротора, поля их осей совпадают, а ротор находится в устойчивом положении. При переключении обмоток управляющим устройством, ток начинает протекать не по первой, а по второй обмотке. Наступает возникновение синхронизирующего момента, в результате которого происходит перемещение ротора в новую устойчивую позицию. При последующем включении первой фазы, имеющей обратную полярность, происходит дальнейший поворот ротора.
Таким образом, последовательное изменение тока в обмотке статора вызывает перемещение поля статора в пространстве. Когда вращение поля прекращается, происходит остановка ротора. Магнитное поле, создаваемое в обмотках управления, перемещается на фиксированное значение угла по окружности статора при всех случаях переключения напряжения.
Шаговый электродвигатель
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают. Это означает, что он преобразует электрическую энергию в механическую. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами отсюда и их название. Каждый шаг представляет собой часть полного оборота.
Шаговые двигатели (stepper motors или stepping motors) — это одна из Конструкция и внутреннее устройство типового гибридного шагового двигателя.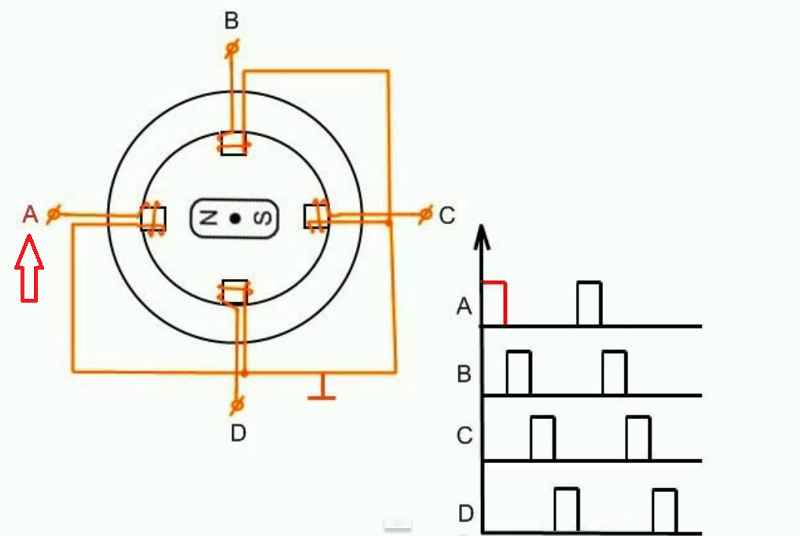
Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Шаговые двигатели являются приводными исполнительными механизмами, обеспечивающими фиксированные угловые перемещения шаги. Каждое изменение угла поворота ротора — это реакция шагового двигателя на входной импульс. Дискретный электропривод с шаговым двигателем естественным образом сочетается с цифровыми управляющими устройствами, что позволяет успешно использовать его в станках с числовым программным управлением, в промышленных роботах и манипуляторах, в часовых механизмах. Дискретный электропривод может быть реализован также с помощью серийных асинхронных электродвигателей , которые за счет специального управления могут работать в шаговом режиме.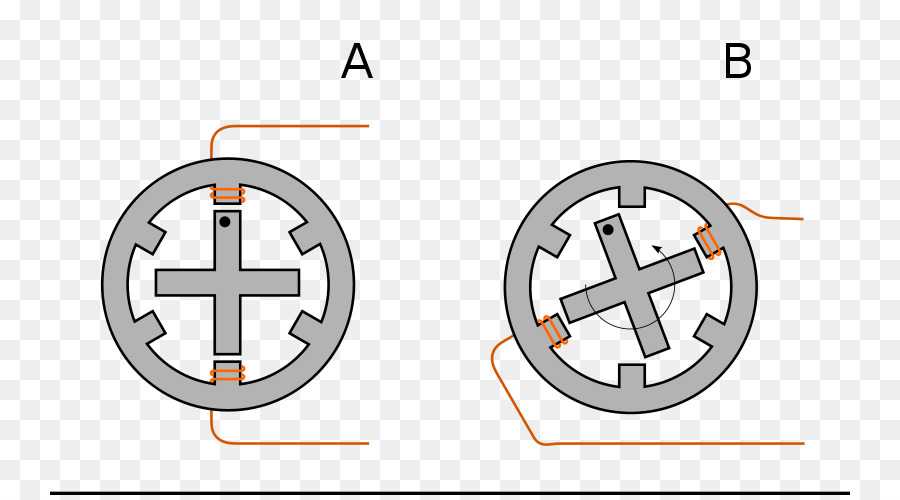 Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме. Принцип действия шаговых двигателей всех типов состоит в следующем.
Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме. Принцип действия шаговых двигателей всех типов состоит в следующем.
Что такое шаговый двигатель, в чем его преимущества? Шагового двигателя
Шаговые двигатели — основа точной робототехники. Грубым аналогом шагового двигателя является серводвигатель. Шаговики применяют там, где требуется очень точно дозировать перемещение актуатора. Самый очевидный пример — робот манипулятор. Погрешность в доли градуса в основании руки, приведет к огромной погрешности на эффекторе.
Существует отдельный вид электродвигателей, которые относятся к разряду исполнительных, дискретного действия. Это шаговый двигатель, принцип работы которого основан на воздействии импульсов на ротор, благодаря чему происходит его перемещение под определенным углом, составляющим шаг.
Primary Menu
Рассмотрим некоторые преимущества таких двигателей. Поскольку шаговый двигатель поворачивается на каждом шаге на строго определенный угол, микроконтроллер может легко подсчитать пройденный путь, зная количество импульсов управления, поданных на шаговый двигатель, и диаметр ведущего колеса. В случае применения на передвижной платформе двух шаговых двигателей, по одному на каждой стороне, используемых для прямого движения и поворота, оказываются возможными повороты на точный заранее определенный угол. Ввиду особой важности шаговых двигателей для робототехники, перед тем, как проектировать и изготовлять какие либо устройства, мы подробно остановимся на принципах их работы. Советские ядерные двигатели В Советском Союзе работы над ядерными ракетными двигателями начались в середине х годов. В году он сделал по этой теме сообщение.
Шаговый двигатель
Новые статьи. Принцип работы, подключение, примеры. Модуль Bluetooth HC Принцип работы, подключение. Чтение и запись данных. Обрабатываем команды от пульта. Принцип работы, подключение, пример.
Обрабатываем команды от пульта. Принцип работы, подключение, пример.
Шаговые двигатели (stepper motors или stepping motors) — это одна из Конструкция и внутреннее устройство типового гибридного шагового двигателя.
Шаговые двигатели
Согласно закону сохранения энергии, любой современный эл. Решить этот вечный вопрос призван двигатель на постоянных магнитах униполярный, линейный, роторный, гравитационный и т. Большинство современных эл.
В чем принципиальные различия между биполярным и униполярным шаговым двигателем, какой стоит выбрать? Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов. Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения. Станки и мехатроника.
Станки и мехатроника.
Дмитрий Левкин Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения. Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов.
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Первые шаговые двигатели появились в х годах XIX века и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1].
За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1].
— руководство по электротехнике
Привет друзья,
В этой статье я обсуждаю принцип работы шагового двигателя , его основы и области применения. Вы найдете его информативным и интересным. Так что продолжайте читать.
Как следует из названия, шаговый двигатель в пределах своего рабочего диапазона и возможностей запускает, останавливает, реверсирует и перемещается на заданный угол шага по командам от электронного логического контроллера. Другими словами, шаговый двигатель — это устройство, которое преобразует цифровые импульсы в точное угловое движение.
Шаговый двигатель представляет собой двигатель постоянного тока с полем, размещенным на роторе в виде постоянных магнитов с двумя, тремя или четырьмя наборами катушек, называемых фазами, размещенными в статоре вокруг ротора. Обмотки подключены к внешнему логическому драйверу, который последовательно подает на обмотки импульсы напряжения. Двигатель реагирует на эти импульсы и по команде выполняет операции пуска, останова и реверса.
Обмотки подключены к внешнему логическому драйверу, который последовательно подает на обмотки импульсы напряжения. Двигатель реагирует на эти импульсы и по команде выполняет операции пуска, останова и реверса.
И ротор, и статор имеют определенное количество зубьев, соответствующее расчетному углу шага. Угол шага определяется как угловое смещение ротора в ответ на каждый импульс.
Положение ротора зависит от угла шага и количества импульсов. Скорость вращения зависит от скорости импульсов (а не напряжения питания), которые точно контролируются; что делает шаговый двигатель идеальным приводом для операций, связанных с точным позиционированием. В отличие от управляющих и серводвигателей, для замыкания контура и контроля положения и скорости ротора не требуется обмотка управления с обратной связью.
Принцип работы шагового двигателя поясняется на рисунке. Ротор занимает положение по возбуждению обмотки:
- В положении (a) только обмотка A находится под напряжением.
- В положении (b) обе обмотки, A и B , находятся под напряжением.
- В положении (с) обмотка B находится под напряжением и т.д.
Из приведенного выше рисунка легко понять, что мы можем вращать ротор поэтапно, подавая ток на катушки статора в определенной последовательности. Это то, что мы делаем в шаговых двигателях. Подробную информацию о работе шагового двигателя вы можете найти в моей следующей статье.
Система шагового двигателя должна ускоряться и замедляться со скоростью, позволяющей двигателю преодолевать инерцию системы. По этой причине роторы имеют меньший диаметр и большую длину. Если шаговый двигатель динамически перегружен, у него будет проскальзывать фаза. Эти двигатели лучше всего подходят для приложений, где нагрузки находятся в пределах мощности двигателя.
Удерживающий момент — это максимальный момент нагрузки, который может преодолеть двигатель, не вызывая проскальзывания ротора из положения устойчивого равновесия.
Работа шагового двигателя точна и точна в широком диапазоне скоростей. Допуск точности – это максимальное отклонение от номинальных значений смещения каждого ротора в ответ на входной импульс в условиях холостого хода. Допуск точности обычно находится в диапазоне от 3 до 5%, и эта ошибка не является кумулятивной.
Диапазон срабатывания шагового двигателя
Если скорость переключения постепенно увеличивается, достигается точка, в которой любое дальнейшее увеличение скорости переключения не может разогнать двигатель от состояния покоя до синхронной скорости. Говорят, что двигатель достиг скорости «втягивания». Двигатель может работать как шаговый двигатель, реагируя на команды пуска-останова только в пределах этой скорости переключения, также называемой его «диапазоном отклика».
При дальнейшем увеличении скорости переключения двигатель работает в пределах диапазона поворота, при котором он не реагирует на команды пуска и останова, но развивает крутящий момент, достаточный для преодоления крутящего момента нагрузки. Дальнейшее увеличение скорости переключения приводит к выходу двигателя из синхронизма.
Дальнейшее увеличение скорости переключения приводит к выходу двигателя из синхронизма.
Контроллер шагового двигателя
Блок-схема типичного контроллера шагового двигателя показана на рисунке. Обмотки возбуждаются в определенной последовательности с заданной скоростью. Поскольку выходные сигналы логических последовательностей слишком слабы, чтобы подать питание на обмотки двигателя, они используются для управления тиристорами, которые, в свою очередь, подают питание на обмотки.
Резонанс в шаговом двигателе
Ротор колеблется из-за инерционного эффекта относительно каждого нового положения, и этот эффект более заметен на малых скоростях. Если ступенчатая частота соответствует одному из обратных пиков этих колебаний, двигатель может время от времени прыгать назад по фазе вместо шага вперед. Этот эффект известен как резонанс в шаговом двигателе и может нарушить работу. Самое простое решение — не работать вблизи зоны резонанса. Другими мерами по преодолению проблемы могут быть:
- Работа в полушаговом режиме.
- Улучшенное демпфирование.
- Использование демпфирующих резисторов между фазами.
Применение шаговых двигателей
Чаще всего шаговые двигатели применяются в кварцевых аналоговых часах. Из-за простоты логического управления, точности и надежности шаговые двигатели широко используются в периферийных устройствах компьютеров, станках с ЧПУ, пультах дистанционного управления, контрольно-измерительных приборах и т. д. Рентгеновские плоттеры, матричные принтеры, головки чтения/записи гибких и винчестерских дисков — все используют шаговые двигатели в качестве приводов позиционирования. Двухфазные двигатели используются для приложений с очень малым крутящим моментом. В основном шаговые двигатели большей мощности относятся к 3-х или 4-х фазным типам.
Спасибо, что прочитали о «принципе работы шагового двигателя».
Читайте также: Как работает шаговый двигатель?
Шаговый двигатель: работа, конструкция, типы, преимущества и недостатки
работа, виды, преимущества, недостатки функциональной области.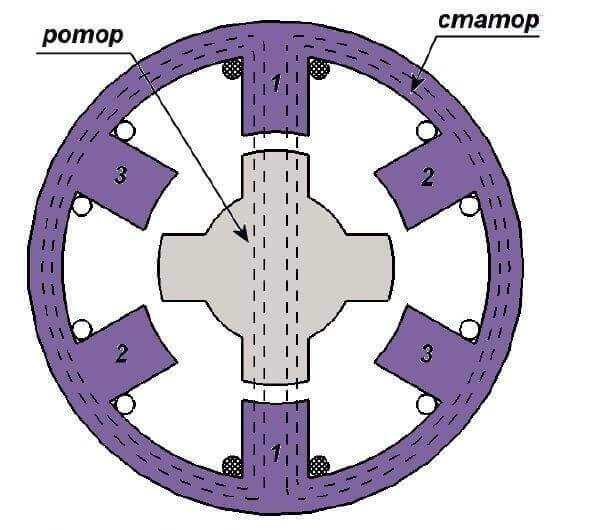 Проще говоря, это комбинация двигателя постоянного тока с электронной технологией, которая позволяет двигателю вращаться и останавливаться на заданный угол. В основном он используется в робототехнике, где рука робота перемещается под заданным углом и удерживается там некоторое время, а после этого возвращается обратно.
Проще говоря, это комбинация двигателя постоянного тока с электронной технологией, которая позволяет двигателю вращаться и останавливаться на заданный угол. В основном он используется в робототехнике, где рука робота перемещается под заданным углом и удерживается там некоторое время, а после этого возвращается обратно.
Это бесщеточное электромеханическое устройство, которое используется для преобразования серии электрических импульсов, подаваемых на их обмотку возбуждения, в точно определенное пошаговое вращение механического вала. Другими словами, шаговый двигатель представляет собой электромеханическое устройство, преобразующее электрическую энергию в механическую.
Это особый тип двигателя постоянного тока, который не вращается непрерывно, а полный оборот делится на число равных шагов. Он работает по принципу теории работы магнитов, заставляющей вал поворачиваться на точное расстояние при подаче импульса электричества.
В шаговом двигателе количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала контролируется путем управления количеством импульсов.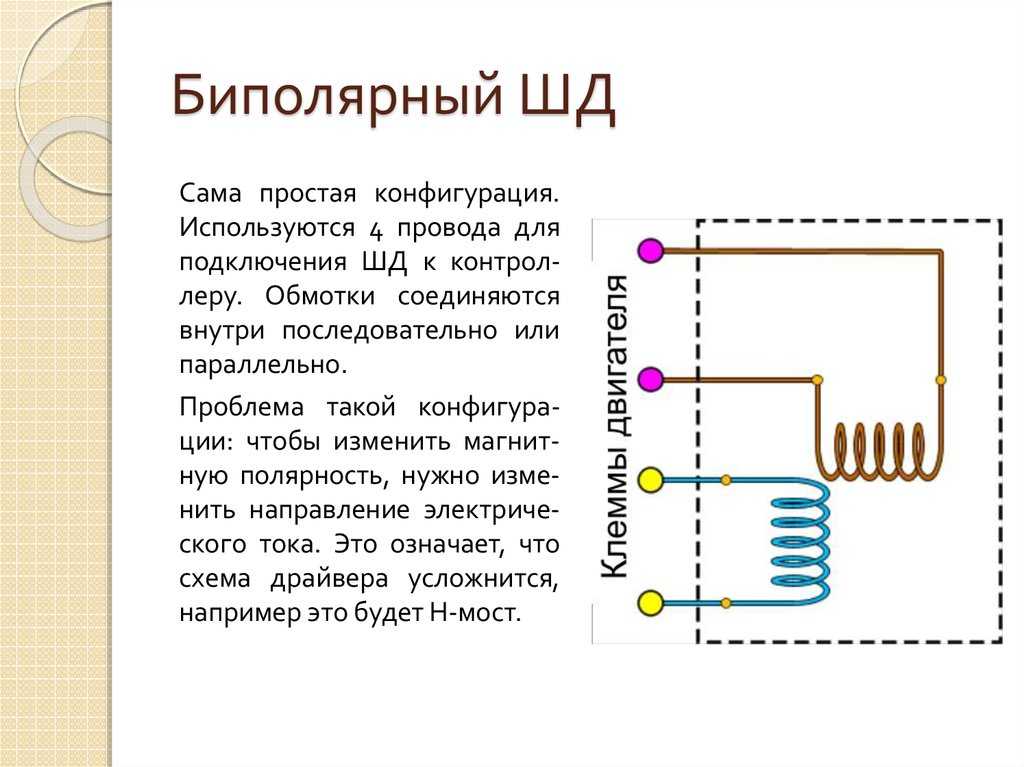 Эти уникальные особенности, отличные от серводвигателя, делают шаговый двигатель подходящим для системы управления с разомкнутым контуром, в которой точное положение вала поддерживается точным числом импульсов без использования датчика обратной связи.
Эти уникальные особенности, отличные от серводвигателя, делают шаговый двигатель подходящим для системы управления с разомкнутым контуром, в которой точное положение вала поддерживается точным числом импульсов без использования датчика обратной связи.
Чем меньше угол шагов, тем больше будет количество шагов на один оборот и выше будет точность получаемого положения. Угол шага может достигать 90 градусов и всего 0,72 градуса, однако обычно используемые углы шага составляют 1,8, 2,5, 7,5 и 15 градусов.
Конструкция:
Шаговый двигатель состоит из статора и ротора. Ротор представляет собой подвижную часть, не имеющую обмотки, щеток и коллектора. Статор состоит из многополюсной и многофазной обмотки, обычно из трех или четырехфазной обмотки, намотанной для необходимого количества полюсов, определяемого желаемым угловым смещением на входные импульсы.
Рабочий:
Шаговый двигатель работает по принципу электромагнетизма. Вал магнитного ротора окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут иметь или не иметь зубья в зависимости от типа статора. Всякий раз, когда статоры возбуждают ротор, он перемещается, чтобы выровняться вместе со статором. Таким образом, статоры последовательно запитываются на разных полюсах, чтобы вращать шаговый двигатель. Благодаря очень хорошему управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и контрольно-измерительных приборов.
Вал магнитного ротора окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут иметь или не иметь зубья в зависимости от типа статора. Всякий раз, когда статоры возбуждают ротор, он перемещается, чтобы выровняться вместе со статором. Таким образом, статоры последовательно запитываются на разных полюсах, чтобы вращать шаговый двигатель. Благодаря очень хорошему управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и контрольно-измерительных приборов.
Типы шаговых двигателей:
- Шаговый двигатель с переменным сопротивлением.
- Шаговый двигатель с постоянными магнитами.
- Гибридный шаговый двигатель.
1. Шаговый двигатель с переменным сопротивлением:
Шаговый двигатель с переменным сопротивлением имеет простую конструкцию с мягким железом, немагнитным зубчатым ротором и электромагнитным статором с обмоткой. Отсутствие притяжения между ротором и обмоткой статора, когда обмотка находится под напряжением, поскольку ротор не намагничен. Когда к противоположной паре обмоток подключен ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор полюсов ротора. Это дает угол ступеней 7,5 или 15 градусов.
Отсутствие притяжения между ротором и обмоткой статора, когда обмотка находится под напряжением, поскольку ротор не намагничен. Когда к противоположной паре обмоток подключен ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор полюсов ротора. Это дает угол ступеней 7,5 или 15 градусов.
2. Шаговый двигатель с постоянными магнитами:
Шаговый двигатель с постоянными магнитами имеет ротор с постоянными магнитами, намагниченный в осевом направлении. Это означает, что он имеет чередующиеся северный и южный полюсы, параллельные валу ротора. На каждый полюс намотана обмотка возбуждения, витки на противоположной паре полюсов последовательно. Ток подается от источника постоянного тока на обмотку через переключатели. Ротор представляет собой постоянный магнит, и поэтому, когда на пару полюсов статора подается ток, ротор будет двигаться, чтобы выровняться с ним. Шаги угла этого двигателя 1,8, 7,5,15,30,34 и 90 градусов.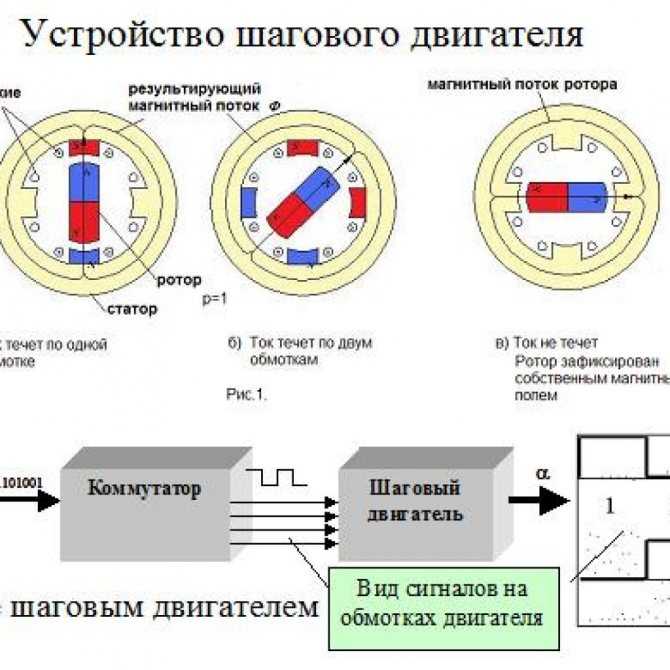
3. Гибридный шаговый двигатель:
Гибридный шаговый двигатель представляет собой сочетание постоянного и переменного реактивного двигателя. Он имеет постоянный магнит, зубчатый ротор, состоящий из двух секций или чашек, противоположных по полярности, зубья которых смещены друг относительно друга. Ротор устанавливается в положение минимального сопротивления в ответ на возбуждение пары катушек статора. Угол шага этого двигателя составляет 0,9 или 1,8 градуса.
Вы также можете посмотреть это видео, чтобы понять различные типы шаговых двигателей и принцип их работы.
Преимущества:
- Угол поворота пропорционален входным импульсам.
- Полный крутящий момент в состоянии покоя.
- Возможно синхронное вращение на очень низкой скорости.
- Нет щеток, так что надежно.
- Скорость прямо пропорциональна частоте входных импульсов; следовательно, может быть реализован широкий диапазон скорости вращения.

- Низкая скорость с высокой точностью.
Недостатки:
- Нет обратной связи.
- Низкая эффективность.
- Может производить больше шума.
- Трудно работать на очень высокой скорости.
- Для плавного хода требуется микрошаг.
Применение:
- Автоматизация производства.
- Упаковка.
- Погрузочно-разгрузочные работы.
- Аэрокосмическая промышленность, особенно авиационная электроника.
- Система получения трехмерных изображений.
- Лазерные измерения.
- Робототехника.
Это все о работе шагового двигателя, типах и т. д. Если у вас есть какие-либо вопросы по переоценке этой статьи, задайте их в комментариях. Если вам понравилась эта статья, не забудьте поделиться ею в социальных сетях. Подпишитесь на наш сайт, чтобы получать больше информативных статей. Спасибо, что прочитали это.
Делиться значит заботиться :)-
КатегорииМехатроникаСообщить об этом объявлении0002 Электродвигатель входит в стандартную комплектацию даже самой простой электроники. Таким образом, это необходимо, особенно в системах, в которых используется вращательное движение. Однако не все двигатели могут быть полезны в ситуациях, когда необходима точность. Именно здесь пригодятся шаговые двигатели NEMA 17. Мы собираемся предоставить всю необходимую информацию о работе этого компонента.Далее мы объясним основы шаговых двигателей. Проверьте это.
Содержание
Что такое NEMA 17? Рис. 1. Детали шагового двигателя в разобранном виде Угол эквивалентен 200 шагам/оборот. Во время работы каждая фаза двигателя может потреблять ток 12А при напряжении 12В.
Таким образом, тока достаточно для поддержания удерживающего момента, эквивалентного 3,2 кг-см.
Также обратите внимание, что этот тип двигателя имеет шесть проводов с цветовой маркировкой. Кроме того, каждый из кабелей имеет оголенный вывод. Таким образом, кабели необходимы для облегчения управления униполярными и биполярными драйверами шаговых двигателей.
Кроме того, каждый из кабелей имеет оголенный вывод. Таким образом, кабели необходимы для облегчения управления униполярными и биполярными драйверами шаговых двигателей.
Если вы собираетесь использовать его с драйвером униполярного шагового двигателя, вам потребуются все шесть проводов. С другой стороны, чтобы использовать провода биполярного шагового двигателя, вам придется пропустить некоторые провода. Обратите внимание, рекомендуемый режим использования — с драйвером биполярного шагового двигателя во время фактического управления двигателем. Рисунок 2. Шаговый двигатель в разобранном виде Кабели наматываются в двух основных частях. Во-первых, это черный, желтый, зеленый провода на первой обмотке катушки. Затем красный, белый и синий провода образуют вторую часть обмотки.
Вот представление конфигурации PIN -кода двигателя:
NEMA 17 Особенности и спецификации
Рисунок 3: Концепция изготовления мощностей.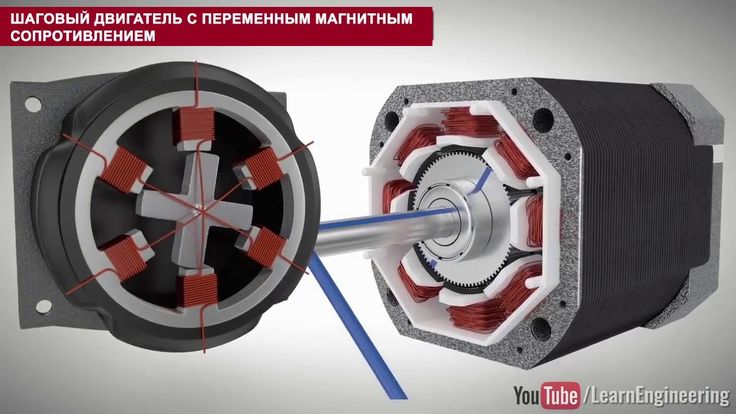
Характеристики
- Способен преобразовывать ток в крутящий момент
- Очень прочный
- и точно
- Биполярный мотор — идеальная замена Makerbot, MBot и др.
- Он относительно среднего размера.
Технические характеристики
- Угол шага 1,8 град.
- Вес 350 г (13 унций) в неиспользованном состоянии
- Номинальный ток: 1,2 А на катушку
- Имеет выходной вал диаметром 5 мм
- Фактический блок управления двигателем имеет размеры 42,3 кв. мм × 48 мм, не включая вал (NEMA 17)
- Имеет 4 провода с 8-дюймовым выводом.
- Привод шагового двигателя имеет удерживающий момент 3,2 кг-см (44 унции-дюйм)
- Шаговый двигатель NEMA 17 Номинальное напряжение 4 В
- Комплект шагового двигателя имеет силу тока 1,2 А при напряжении 4 В
- Стандартная длина двигателя составляет 1,54 дюйма
- Индуктивность: 2,8 мГн на катушку
- Длина провода 30 см (12″)
- Номинальное рабочее/управляющее напряжение 12 В пост.
 тока
тока - Имеет 4 фазы
- Двигатель имеет 200 шагов на оборот
- Имеет фазовое сопротивление 3,3 Ом на катушку
- Два шарикоподшипника поддерживают выходной вал
- Имеет рабочую температуру от -10 до 40 °C
- Наконец, он имеет униполярный удерживающий крутящий момент 22,2 унции на дюйм
Как использовать NEMA 17
Использование шаговых двигателей NEMA 17 относительно просто. Во-первых, проверьте схему катушки ниже. Понимание того, как шаговый двигатель будет вращаться вокруг фаз проводки, является обязательным.
Рис. 4. Схема катушки шагового двигателя 28-BYJ48
Обратите внимание, что шаговые двигатели NEMA 17 потребляют большие токи во время работы. Следовательно, обязательно использовать микросхему драйвера, такую как A4988.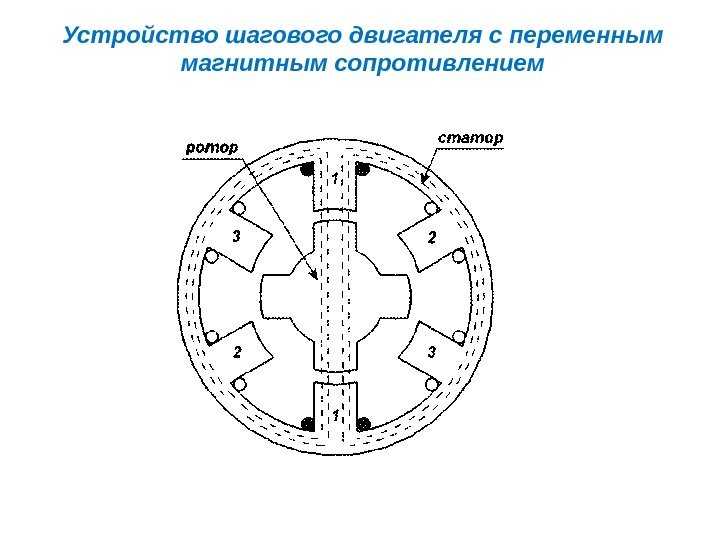 Также двигатель имеет шесть проводов, которые соединены с двумя разделенными обмотками. Во время использования отводы центральной обмотки подключаются к положительному источнику питания. Два конца каждой обмотки взаимозаменяемо заземлены в цепи возбуждения.
Также двигатель имеет шесть проводов, которые соединены с двумя разделенными обмотками. Во время использования отводы центральной обмотки подключаются к положительному источнику питания. Два конца каждой обмотки взаимозаменяемо заземлены в цепи возбуждения.
Применения
Рис. 5. 3D-принтер с ярко-зеленой нитью накаливания
Шаговые двигатели требуют точного управления в других коммерческих системах, применимых в других критически важных системах управления. Кроме того, они являются обычным явлением в приложениях, где целью является преодоление сложности системы управления с обратной связью. Ниже приведены некоторые примеры применения, в которых могут быть полезны электродвигатели:
- Станки с ЧПУ
- Двигатели принтера, например, в двигателе 3D-принтера
- Используется в линейных приводах
- Машины точного контроля
- Жесткий диск
- 3D-принтер/ЧПУ или машины для прототипирования (например, RepRap)
- Лазерные резаки
Заключение
Шаговые двигатели кажутся сложными по своей конструкции, но они работают по простому принципу, как мы только что объяснили.