Что такое шаговый двигатель. Как работает шаговый двигатель. Какие бывают типы шаговых двигателей. Где применяются шаговые двигатели. Преимущества и недостатки шаговых двигателей.
Что такое шаговый двигатель и как он работает
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Его вал поворачивается на фиксированный угол (шаг) при подаче одного управляющего импульса.
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора. При подаче импульсов тока на обмотки статора создается вращающееся магнитное поле, которое заставляет поворачиваться ротор двигателя на определенный угол.
Основные характеристики шаговых двигателей:
- Угол шага — угол поворота вала за один импульс управления (типичные значения 0.9°, 1.8°, 3.6°, 7.5°)
- Точность позиционирования — погрешность углового перемещения (обычно 3-5% от величины шага)
- Максимальная частота импульсов — определяет максимальную скорость вращения
- Момент удержания — максимальный момент, который можно приложить к ротору без его проворота
Основные типы шаговых двигателей
Существует три основных типа шаговых двигателей:
1. Двигатели с постоянными магнитами (PM)
Ротор содержит постоянный магнит. Отличаются простотой конструкции и низкой стоимостью. Типичный угол шага 7.5° — 15°.
2. Двигатели с переменным магнитным сопротивлением (VR)
Ротор выполнен из магнитомягкого материала без постоянных магнитов. Обеспечивают малый угол шага (1.8° — 3.6°), но имеют низкий момент.
3. Гибридные двигатели
Сочетают особенности двух предыдущих типов. Ротор содержит постоянный магнит и имеет зубчатую структуру. Обеспечивают высокую точность (угол шага 0.9° — 3.6°) и высокий момент.
Преимущества и недостатки шаговых двигателей
Основные достоинства шаговых двигателей:
- Высокая точность позиционирования без обратной связи
- Возможность быстрого старта/остановки/реверса
- Высокая надежность благодаря отсутствию коллектора
- Однозначная зависимость положения от входных импульсов
- Возможность получения очень низких скоростей вращения
К недостаткам можно отнести:
- Возможность потери шагов при больших нагрузках
- Невысокая удельная мощность
- Сложность работы на высоких скоростях
- Склонность к резонансным явлениям
Области применения шаговых двигателей
Шаговые двигатели широко используются в различных системах точного позиционирования:
- Станки с ЧПУ
- 3D-принтеры и плоттеры
- Роботы и манипуляторы
- Приводы жестких дисков
- Системы автофокусировки в фото/видеотехнике
- Медицинское оборудование
- Автоматизированные производственные линии
Управление шаговыми двигателями
Для управления шаговыми двигателями используются специальные драйверы, которые формируют необходимые последовательности импульсов тока в обмотках. Существует несколько режимов управления:
Полношаговый режим
В этом режиме ротор перемещается на один полный шаг за один управляющий импульс. Обеспечивает максимальный момент, но работа может быть недостаточно плавной.
Полушаговый режим
Ротор перемещается на половину шага за импульс. Позволяет повысить плавность работы и точность позиционирования, но снижает момент.
Микрошаговый режим
Драйвер формирует синусоидальные токи в обмотках, что позволяет разделить полный шаг на большое количество микрошагов (до 256). Обеспечивает очень плавное вращение.
Выбор шагового двигателя
При выборе шагового двигателя для конкретного применения необходимо учитывать следующие факторы:

- Требуемый крутящий момент и мощность
- Необходимую точность позиционирования
- Диапазон рабочих скоростей
- Габаритные ограничения
- Условия эксплуатации (температура, влажность и т.д.)
- Совместимость с системой управления
Правильно подобранный шаговый двигатель обеспечит надежную и точную работу системы позиционирования в течение длительного срока.
Сравнение шаговых двигателей с другими типами электродвигателей
Шаговые двигатели имеют как преимущества, так и недостатки по сравнению с другими типами электродвигателей:
Шаговые двигатели vs Сервоприводы
Преимущества шаговых двигателей:
- Более низкая стоимость
- Простота управления без обратной связи
- Высокий момент на низких скоростях
Недостатки:
- Меньшая удельная мощность
- Ограниченные максимальные скорости
- Возможность пропуска шагов при перегрузке
Шаговые двигатели vs Бесколлекторные DC двигатели
Преимущества шаговых двигателей:
- Точное позиционирование без датчиков
- Высокая надежность
Недостатки:

- Меньшая плавность хода
- Более низкий КПД
- Сложность работы на высоких скоростях
Тенденции развития шаговых двигателей
Основные направления совершенствования шаговых двигателей включают:
- Повышение удельной мощности и КПД
- Улучшение динамических характеристик
- Снижение уровня вибраций и шума
- Интеграция с интеллектуальными системами управления
- Применение новых магнитных материалов
- Миниатюризация конструкции
Развитие технологий производства и управления позволяет расширять области применения шаговых двигателей, делая их все более конкурентоспособными по сравнению с другими типами электроприводов.
Шаговые двигатели — Линейные системы
Шаговый двигатель является исполнительным звеном в системах шагового привода, преобразует электрическую энергию в механическую. Двигатель называют шаговым потому, что при изменении тока в обмотках двигателя соответствующим образом — ротор двигателя совершает дискретный поворот вокруг своей оси на определенный угол (угловой шаг). Помимо поворота, шаговый двигатель позволяет удерживать ротор в определенном положении, путем поддержания уровня тока в обмотках. Таким образом, становится возможным построение системы с точным позиционированием, или следящей системы без эффекта «рыскания».
Для осуществления полезного перемещения шаговый двигатель присоединяется через муфту к ходовому винту, шарико-винтовой передаче или напрямую, к ведущей шестерне зубчатой передачи.
Скачать каталог шаговых двигателей в формате pdf(4.58 MB)
При выборе шагового двигателя, наиболее важно обратить внимание на крутящий момент. Максимальный крутящий момент напрямую связан с размерами двигателя: чем больше двигатель — тем больше крутящий момент. В каталогах обычно указывается максимальный квазистатический крутящий момент — этот параметр является оценочным, т.к. крутящий момент шагового двигателя заметно снижается с увеличением скорости вращения (вернее, частоты коммутации обмоток). Как правило наиболее эффективным оказывается использование шагового двигателя в диапазоне до 1500..2000 шагов в секунду в полушаговом или микрошаговом режимах, выбираемых с помощью драйвера управления ШД.
Максимальный крутящий момент напрямую связан с размерами двигателя: чем больше двигатель — тем больше крутящий момент. В каталогах обычно указывается максимальный квазистатический крутящий момент — этот параметр является оценочным, т.к. крутящий момент шагового двигателя заметно снижается с увеличением скорости вращения (вернее, частоты коммутации обмоток). Как правило наиболее эффективным оказывается использование шагового двигателя в диапазоне до 1500..2000 шагов в секунду в полушаговом или микрошаговом режимах, выбираемых с помощью драйвера управления ШД.
Далее следует подобрать шаг двигателя (угол поворота вала), чтобы, с учетом последующей механической передачи, система обеспечила требуемую точность. Наиболее распространенными являются угол 1,8 и 0,9 градуса. При необходимости уменьшения шага можно использовать функцию дробления шага на драйвере двигателя от 1/2 до 1/256. Также дробление шага позволит сгладить вращение — сделает его более плавным.
| Серия ШД | Диаметр (сторона квадрата), мм | Крутящий момент, кгс*см | Угловой шаг, град | Рекомендуемое управление |
| FL20STH | 20. 2 2 |
0.18 — 0.3 | 1.8 | OMD-15 + OSM 17R |
| FL28STH | 28 | 0.43 — 1.2 | 1.8 | OMD-15 + OSM 17R |
| FL35ST | 35.2 | 0.5 — 1.4 | 1.8 | OMD-15 + OSM 17R |
| FL39ST | 39.3 | 0.65 — 2.8 | 1.8 | OMD-15 + OSM 17R |
| FL42STH | 42.3 | 1.6 — 4.5 | 1.8 | OMD-40 + OSM 40R |
| FL42STHM | 42.3 | 1.58 — 4.4 | 0.9 | OMD-40 + OSM 40R |
| FL57ST | 56.4 | 2.88 — 12.5 | 1.8 | OMD-40 + OSM 40R |
| FL57STHM | 56.4 | 3. 9 — 18 9 — 18 |
0.9 | OMD-40 + OSM 40R |
| FL57STH | 56.4 | 3.9 — 18.9 | 1.8 | OMD-40 + OSM 40R |
| FL60STH | 60 | 7/8 — 31 | 1.8 | OMD-40 + OSM 40R |
| FL86ST | 82.5 | 13 — 50 | 1.8 | OMD-88 + OSM 88R |
| FL86STH | 82.85 | 26 — 153 | 1.8 | OMD-88 + OSM 88R |
| FL110STH | 109.86 | 112 — 280 | 1.8 | OMD-88 + OSM 88R |
| FL130BYG | 132 | 275 — 509 | 1.8 | OMD-88 + OSM 88R |
Шаговые двигатели не требуют специального обслуживания, т.к. в них применяются подшипники закрытого типа, с закладной смазкой на весь срок службы. Крайне не рекомендуется производить самостоятельный ремонт шаговых двигателей, в связи с тем, что зазор между ротором и статором очень небольшой. Правильно выставить и отбалансировать ротор можно только на специальном оборудовании на заводе-изготовителе, под контролем специалистов.
Крайне не рекомендуется производить самостоятельный ремонт шаговых двигателей, в связи с тем, что зазор между ротором и статором очень небольшой. Правильно выставить и отбалансировать ротор можно только на специальном оборудовании на заводе-изготовителе, под контролем специалистов.
Скачать каталог шаговых двигателей в формате pdf(4.58 MB)
Сервопривод или шаговый двигатель?
- Главная /
- Справочник /
- Сервопривод или шаговый двигатель?
В случаях, когда необходима высокая точность работы исполнительных механизмов, используют асинхронный электродвигатель с энкодером обратной связи.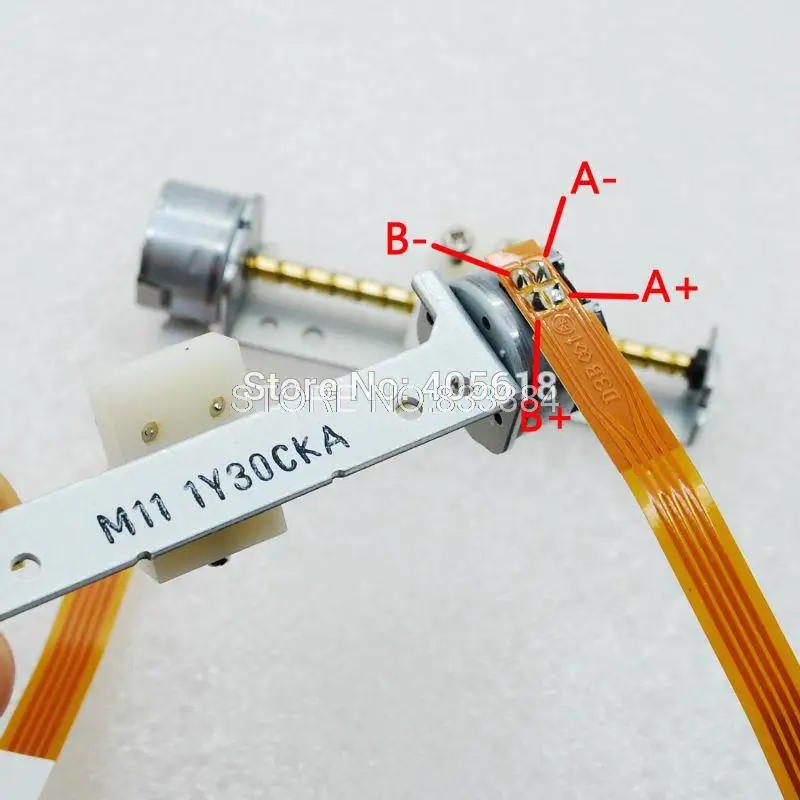 Однако в промышленных станках с особыми требованиями к точности позиционирования подобное оборудование не справится с задачами в силу ряда конструктивных недостатков — низкого момента на малых скоростях, проскальзывания ротора, инерции при разгоне и торможении. В таких случаях используются сервоприводы и шаговые двигатели. Рассмотрим преимущества и недостатки обоих типов приводов.
Однако в промышленных станках с особыми требованиями к точности позиционирования подобное оборудование не справится с задачами в силу ряда конструктивных недостатков — низкого момента на малых скоростях, проскальзывания ротора, инерции при разгоне и торможении. В таких случаях используются сервоприводы и шаговые двигатели. Рассмотрим преимущества и недостатки обоих типов приводов.
Сервоприводы
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.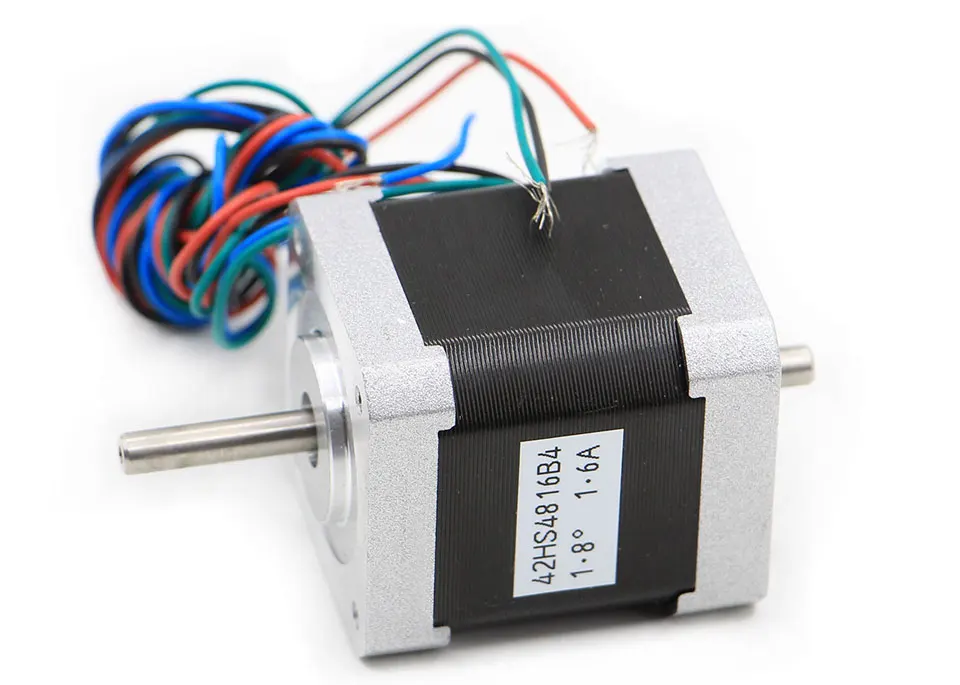
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.
Шаговые двигатели
Шаговый двигатель — это особый вид многофазного синхронного двигателя, дискретное вращение которого производится путем подачи импульсов напряжения на нужные обмотки статора. При этом ротор не имеет обмоток и состоит из магнитного материала.
Основной параметр шагового двигателя — его шаг, или количество шагов на оборот. Для одного полного оборота ротора необходимо строго определенное количество импульсов. Чем меньше шаг, тем большую точность позиционирования может обеспечить данный шаговый двигатель.
Управляющие импульсы формируются специальным драйвером, который получает задание с контроллера. При этом обратной связи не требуется, поскольку путем подсчета импульсов всегда можно узнать, на какой угол повернулся вал шагового двигателя, и сколько оборотов он сделал.
При этом обратной связи не требуется, поскольку путем подсчета импульсов всегда можно узнать, на какой угол повернулся вал шагового двигателя, и сколько оборотов он сделал.
Преимущества сервоприводов
- Мощность серводвигателей может достигать 15 кВт, в то время как мощность шагового электродвигателя, как правило, не превышает 1 кВт.
- Бесшумность работы благодаря принципу действия и сверхточному исполнению конструкции.
- Скорость вращения в сервоприводах может достигать 10000 об/мин, в некоторых случаях и больше. У шаговых двигателей номинальная скорость вращения обычно не превышает 1000 об/мин вследствие падения момента и увеличения вероятности ошибок.
- Высокая энергоэффективность. Потребляемая мощность сервопривода пропорциональна нагрузке на валу. Для шагового электродвигателя потребляемая мощность одинакова вне зависимости от нагрузки.
- Наличие обратной связи обеспечивает точной информацией о повороте вала в любой момент времени.
 В шаговых двигателях возможно проскальзывание при перегрузке, накопление ошибки и потеря позиционирования.
В шаговых двигателях возможно проскальзывание при перегрузке, накопление ошибки и потеря позиционирования. - Большая плавность хода. В шаговых двигателях добиться плавности можно только путем применения специальных методов управления.
Преимущества шаговых двигателей
- Меньшая цена при одинаковой мощности в силу более простой конструкции двигателя и драйвера.
- Возможность работы на экстремально низких оборотах без ухудшения характеристик и применения редукторов.
- Более точное позиционирование, обусловленное конструкцией двигателя.
- Отсутствие необходимости в обратной связи.
- Для фиксации вала двигателя при останове достаточно снять с него напряжение. При останове серводвигателя необходимо расходовать мощность на удержание либо использовать электромеханический тормоз.
Применение
В промышленном оборудовании для выполнения задач позиционирования имеет смысл использовать и асинхронные двигатели с обратной связью, и сервоприводы, и шаговые двигатели.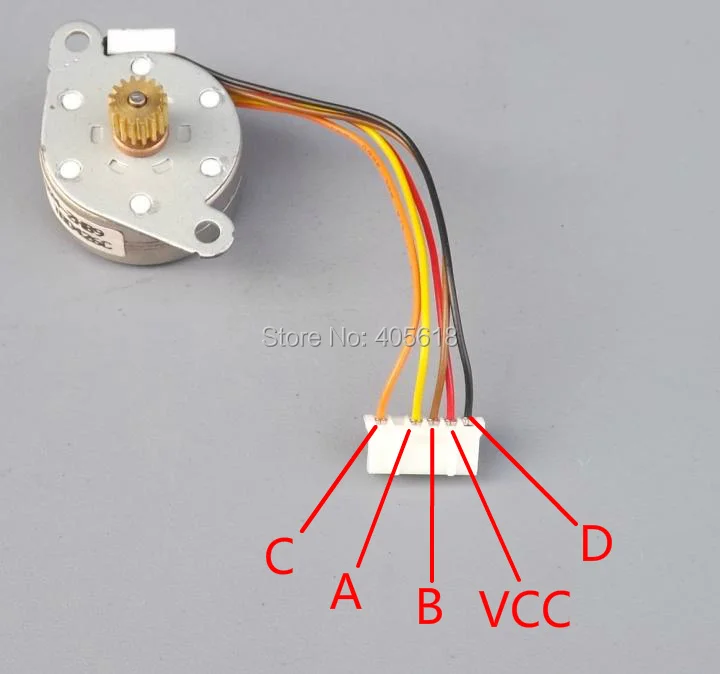
Сервоприводы устанавливаются в тех узлах оборудования, где требуется точное позиционирование механизмов для их синхронизации с другими узлами. В частности сервоприводы широко используют в обрабатывающих станках.
Шаговые двигатели нашли наибольшее применение в станках с ЧПУ и в робототехнике.
На практике встречаются производственные линии, в которых в различных узлах используются все три типа электродвигателей.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Как выбрать мотор-редуктор
Редуктор от «А» до «Я»
Подпишитесь на рассылку!
Никакого спама! Только полезная справочная информация.
Я согласен на обработку персональных данных
Шаговые двигатели. Множество размеров и версий мощности.
Шаговые двигатели с замкнутым контуром как альтернатива двигателям BLDC
Технология шаговых двигателей долгое время считалась экономичной альтернативой приложениям, не требующим высокой производительности, обеспечиваемой серводвигателями. Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Эта тенденция была остановлена и даже обращена вспять в последние годы благодаря разработке управляемых шаговых двигателей с обратной связью. Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
В сочетании с более выгодной ценой системы шаговых двигателей, шаговые двигатели с обратной связью являются экономичной альтернативой сервосистемам. Тем не менее, системам с обратной связью не всегда удавалось вытеснить системы с обратной связью в традиционных приложениях с шаговыми двигателями, таких как автоматизация лабораторий или небольшие фрезерные станки с ЧПУ. Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Виртуальный энкодер заменяет реальный энкодер
Чтобы воспользоваться преимуществами ориентированного на поле управления в этих приложениях, Nanotec разработала безсенсорное, т.е. без энкодера, управление шаговыми двигателями, в котором фактическое положение а скорость ротора определяется «виртуальным энкодером» в контроллере.
Системы без датчиков уже много лет используются в двигателях BLDC, особенно в вентиляторах и насосах, не требующих управления положением. Во всех бессенсорных системах используется физический эффект, заключающийся в том, что двигатель индуцирует противодействующее напряжение (противоЭДС) во время работы, которое пропорционально скорости.
Простейший безсенсорный контроль заключается в прямом измерении противо-ЭДС, когда катушка обесточена в цикле коммутации. Однако по сравнению со стандартной активацией этот метод требует специального оборудования и стабилен только прибл. 10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и реальный оптический или магнитный энкодер.
Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и реальный оптический или магнитный энкодер.
Все двигатели Plug & Drive от Nanotec реализуют управление, ориентированное на поле (замкнутый контур). BLDC и шаговые двигатели контролируются по полю в зависимости от нагрузки и отличаются только рабочими точками из-за разного количества полюсов. Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Без потерь на шаг, без резонансов
Критически важным фактором для качества контроллера на основе наблюдателя является хорошая модель используемого двигателя, как с точки зрения математических формул, так и с точки зрения констант двигателя подключенного двигателя.
Таким образом, перед нами стояла задача найти достаточно точную математическую модель двигателя, которую можно было бы полностью рассчитать в каждом цикле управления даже в небольшом микропроцессоре. В принципе, шаговые двигатели математически аналогичны двигателям BLDC, но имеют только две фазы вместо обычных трех фаз BLDC, а также демонстрируют некоторые особенности в модели на более высоких скоростях из-за большего количества полюсов.
Другим важным аспектом практического использования бездатчикового контроллера является идентификация параметров модели. Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Бессенсорная система от Nanotec, напротив, работает с очень небольшим количеством параметров, которые на самом деле не обязательно знать пользователю: процедура автоматической настройки измеряет подключенный двигатель и автоматически определяет все необходимые параметры.
В зависимости от типа двигателя информация о скорости и положении поступает в диапазоне от 100 до 250 об/мин. Эта информация столь же точна, как и у оптического энкодера с шагом 500 или 1000. Результирующее управление двигателем имеет такое же качество и крутящий момент, как и управление двигателем с помощью энкодера. Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Напротив, на высоких скоростях бездатчиковая система работает лучше, чем поворотный энкодер, который всегда демонстрирует допуск на биение, что приводит к синусоидальной угловой ошибке. В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и погрешность угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
Управление на основе наблюдателя делает ненужным использование двигателей с очень высокой противо-ЭДС, но недостатком которых является высокая индуктивность и, следовательно, более низкая динамика. Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Сочетание разомкнутого и замкнутого контура
Бездатчиковое управление особенно удобно для шаговых двигателей, поскольку его можно использовать не только для управления скоростью, но и для позиционирования в сочетании с управлением без обратной связи. Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку обычно на низких скоростях в режиме разомкнутого контура проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.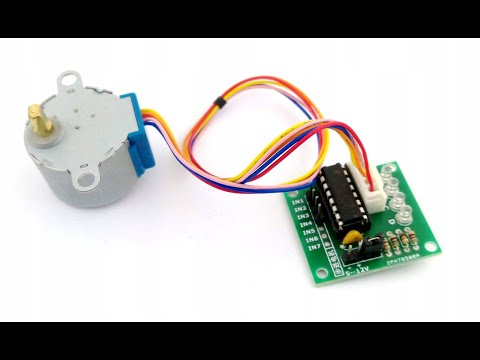
Шаговые двигатели | Прикладное движение
Что такое шаговый двигатель?
Шаговый двигатель определяется как устройство, нормальное движение вала которого состоит из дискретных угловых перемещений практически одинаковой величины при работе от последовательно переключаемого источника питания постоянного тока.
Шаговый двигатель представляет собой цифровое устройство ввода-вывода. Он особенно хорошо подходит для приложений, в которых управляющие сигналы представлены в виде цифровых импульсов, а не аналоговых напряжений. Один цифровой импульс на привод шагового двигателя или транслятор заставляет двигатель увеличивать угол движения на один точный угол. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей, хотя в промышленной автоматизации наиболее распространенным типом является гибридный тип:
- Активный ротор: постоянный магнит (PM)
- Реактивный ротор: переменное сопротивление (VR)
- Комбинация PM и VR: гибрид (HY)
Applied Motion Products в основном предлагает шаговые двигатели гибридного типа с углом шага 1,8°.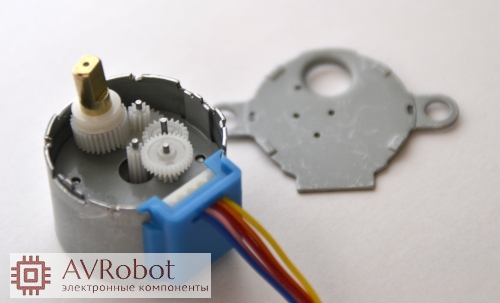
Тип с постоянным магнитом
Этот тип шагового двигателя имеет ротор с постоянным магнитом. Статор может быть аналогичен статору обычного 2- или 3-фазного асинхронного двигателя или иметь конструкцию, аналогичную штампованному двигателю. Последний тип является наиболее популярным.
A) Обычный тип с постоянными магнитами. На рис. 1 показана схема обычного шагового двигателя с ротором на постоянных магнитах. Показана двухфазная обмотка. На рис. 1а показана фаза А, на которую подается напряжение с положительной клеммой «А». Поле находится под углом 0°. Когда катушка намотана, как показано, северный полюс ротора также находится под углом 0°. Ступени двигателя указаны в Таблице I.
ТАБЛИЦА I
| Ступень | Положение Ротор и Вал | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | |||||||
| phase | phase | ||||||||||
| A | A’ | B | B’ | ||||||||
| 0 | 0 | 0 | + | — | OFF | OFF | 1A | ||||
| 1 | 9082 | OFF | OFF | + 9082 | OFF | OFF | + 9082 | . 0082 0082 | — | 1b | |
| 2 | 180 | 180 | — | + | off | off | 1c | ||||
| 3 | 270 | 270 | off | off | — | + | 1d | ||||
Вал совершает один оборот на каждый полный оборот электромагнитного поля в этом двигателе.
На рис. 2 показан тот же двигатель с обеими обмотками под напряжением. Важным отличием здесь является то, что результирующее электромагнитное поле находится между двумя полюсами. На рис. 2 поле сместилось на 45° относительно поля на рис. 1. В таблице II показана последовательность включения питания и положения ротора.
TABLE II
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | ||||||||||||
| phase | phase | |||||||||||||||
| A | A | B | B ‘ | |||||||||||||
| 0 | 45 | 45 | + | — | + | — | 2A | + | — | 2A | + | — | 2A | + | — | 2A0082 |
| 1 | 135 | 135 | — | + | + | — | 2b | |||||||||
| 2 | 225 | 225 | — | + | — | + | 2c | |||||||||
| 3 | 315 | 315 | + | — | — | + | 2d | |||||||||
As in the one-phase-on energizing scheme, the shaft completes one revolution for каждый полный оборот электромагнитного поля.
Должно быть очевидно, что этот двигатель может работать на полшага; т. е. шаг с небольшим шагом. Это возможно за счет объединения питания, показанного на рисунке 1, с показанным на рисунке 2. На рисунке 3 показаны схемы двигателя с полушаговым движением ротора. Последовательность включения и положение ротора показаны в таблице III.
ТАБЛИЦА III
| Ступень | Положение Ротор и Вал | (Механические градусы) Электромагнитный Field | Energization | Figure | |||
| phase | phase | ||||||
| A | A’ | B | B’ | ||||
| 0 | 0 | 0 | + | — | off | off | 3a |
| 1 | 45 | 45 | + | — | + | — | 3b |
| 2 | 90 | 90 | off | off | + | — | 3c |
| 3 | 135 | 135 | — | + | + | — | 3d |
Как и на предыдущих диаграммах, ротор и вал перемещаются под тем же углом, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45° вместо 90° на предыдущей диаграмме.
Обратите внимание, что каждый шаг приводил к повороту на 45° вместо 90° на предыдущей диаграмме.
Шаговый двигатель с постоянными магнитами может иметь бифилярную обмотку, чтобы избежать необходимости менять полярность обмотки. На рисунке 4 показана бифилярная обмотка, а в таблице IV показана последовательность подачи питания.
TABLE IV
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | ||||||||||
| phase | phase | |||||||||||||
| A | B | C | D | |||||||||||
| 0 | 0 | 0 | on | off | off | off | 4a | |||||||
| 1 | 90 | 90 | OFF | OFF | на | OFF | 4B | |||||||
| 2 | 180 | 180 | OFF | на | 180 | OFF | на | OFF | ON | на | . 0103 OFF 0103 OFF | 4C | ||
| 3 | 270 | 270 | OFF | OFF | OFF | на | 4D | на | 4D | 9084на | 4D | 9084 4444444444444444444444444444. Требуется меньше переключающих транзисторов.|||
 Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями внутри, взаимодействующими с ротором. Каждый корпус катушки имеет такое же количество зубцов, как и количество полюсов ротора. Корпуса смещены друг относительно друга в радиальном направлении на половину шага зубьев.
Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями внутри, взаимодействующими с ротором. Каждый корпус катушки имеет такое же количество зубцов, как и количество полюсов ротора. Корпуса смещены друг относительно друга в радиальном направлении на половину шага зубьев. | Step Angle Degrees | Steps Per Revolution |
| 1.8 | 200 |
| 3.6 | 100 |
| 3.75 | 96 |
| 7,5 | 48 |
| 40 | |
| 10 | 36 |
| 11.2555 | |
| 11.255592 | |
| 11.255592 | |
| 11.2555 | |
| 110082 | |
| 110082 3 | |
| 0103 32 | |
| 15 | 24 |
| 18 | 20 |
22. 5 5 | 16 |
| 30 | 12 |
| 45 | 8 |
| 90 | 4 |
Тип с переменным сопротивлением
Шаговый двигатель этого типа имеет электромагнитный статор с ротором из магнитомягкого железа, имеющим зубья и пазы, подобные ротору индукторного генератора переменного тока. В то время как двигатели с постоянными магнитами в основном являются 2-фазными машинами, для двигателей VR требуется как минимум 3 фазы. Большинство шаговых двигателей VR имеют 3 или 4 фазы, хотя доступны и 5-фазные двигатели VR.
Схема трехфазного двигателя VR показана на рис. 7. Показанный двигатель имеет 12 зубьев статора, 8 зубьев ротора и угол шага 15°. The energization sequence is shown in Table V.
TABLE V
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization Phase | ||
| A | B | С | |||
| 0 | 15 | 60 | on | off | off |
| 1 | 30 | 120 | off | on | off |
| 2 | 45 | 180 | off | OFF | на |
| 3 | 60 | 240 | на | OFF | OFF |
В VR STEP, на поле, поля.
На рис. 8 показана схема 4-фазного шагового двигателя с углом поворота 15°, при этом одна фаза находится под напряжением. Диаграмма возбуждения показана в Таблице VI.
TABLE VI
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Phases | |||
| A | B | C | D | |||
| 0 | 15 | -45 | on | off | off | off |
| 1 | 30 | -90 | off | on | off | off |
| 2 | 45 | -135 | off | off | on | off |
| 3 | 60 | 135 | off | off | off | on |
Обратите внимание на вращение электромагнитного поля.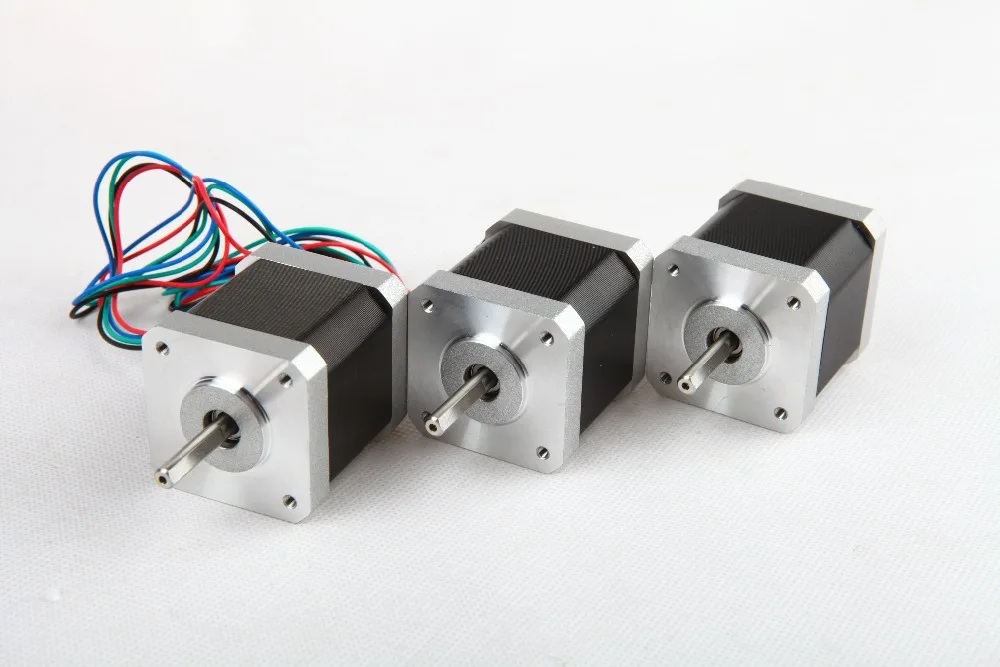 Поле совершает большой скачок во вращении между шагами 2 и 3. Это характерно для двигателя, подключенного таким образом. На рис. 9 показан этот двигатель с двумя фазами, включенными одновременно. Вращение поля остается прежним. Способ исправить это показан на схеме на рисунке 10. Схемы на рисунках 8 и 9 иллюстрируют обмотки, соединенные 4N и 4S. Это указывает на магнитные полюса, когда они находятся под напряжением. Соединение катушки, показанное на рисунке 10, представляет собой симметричное соединение, называемое N-S-N-S из-за полярности катушки. Обратите внимание, что катушка фазы А имеет два южных полюса и не имеет северных полюсов для пути возврата потока. Вы можете быть уверены, что он будет. Поток будет возвращаться по пути наименьшего сопротивления, а именно через пары полюсов, ближайшие к двум зубьям ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это индуцирует ток в обмотке, замедляющий ротор. Величина тока определяется напряжением на катушке.
Поле совершает большой скачок во вращении между шагами 2 и 3. Это характерно для двигателя, подключенного таким образом. На рис. 9 показан этот двигатель с двумя фазами, включенными одновременно. Вращение поля остается прежним. Способ исправить это показан на схеме на рисунке 10. Схемы на рисунках 8 и 9 иллюстрируют обмотки, соединенные 4N и 4S. Это указывает на магнитные полюса, когда они находятся под напряжением. Соединение катушки, показанное на рисунке 10, представляет собой симметричное соединение, называемое N-S-N-S из-за полярности катушки. Обратите внимание, что катушка фазы А имеет два южных полюса и не имеет северных полюсов для пути возврата потока. Вы можете быть уверены, что он будет. Поток будет возвращаться по пути наименьшего сопротивления, а именно через пары полюсов, ближайшие к двум зубьям ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это индуцирует ток в обмотке, замедляющий ротор. Величина тока определяется напряжением на катушке. Катушка с диодной фиксацией будет иметь больший ток, чем обмотка с резисторным диодом или стабилитроном. На рисунке 11 показана схема 4-фазного шагового двигателя VR с подключением N-S-N-S и двумя фазами, находящимися под напряжением. Обратите внимание на короткий путь потока между полюсами.
Катушка с диодной фиксацией будет иметь больший ток, чем обмотка с резисторным диодом или стабилитроном. На рисунке 11 показана схема 4-фазного шагового двигателя VR с подключением N-S-N-S и двумя фазами, находящимися под напряжением. Обратите внимание на короткий путь потока между полюсами.
Часто необходимо уменьшить угол шага без использования зубчатого зацепления. Один из методов заключается в удвоении количества зубьев ротора и статора. Если бы двигатель был сконструирован так, как показано на рис. 7, зубья были бы тонкими и их было бы трудно заводить. Лучший способ сделать это показан на рисунке 12. Количество полюсов ротора и статора уменьшено.
На рис. 13 показана схема шагового двигателя с переменным сопротивлением с шагом 5°. Диаграмма двигателя VR с шагом 1,8° показана на рис. 14.
Двигатели с переменным некачественным.
Гибридный тип
Этот тип двигателя часто называют двигателем с постоянными магнитами. Он использует комбинацию постоянного магнита и структуры с переменным магнитным сопротивлением. Его конструкция аналогична асинхронному двигателю. На рис. 15 показан упрощенный тип гибридного двигателя, иллюстрирующий его конструкцию. Ротор имеет две концевые детали (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально смещенными друг от друга на половину шага зубьев. Их разделяет круглый постоянный магнит. Ярма имеют практически равномерный поток противоположной полярности. Статор изготовлен из многослойной стали. Двигатель, показанный на рисунке 15, имеет 4 катушки, расположенные в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A, а другая — фазой B. Для показанного двигателя каждый полюс имеет один зубец.
Он использует комбинацию постоянного магнита и структуры с переменным магнитным сопротивлением. Его конструкция аналогична асинхронному двигателю. На рис. 15 показан упрощенный тип гибридного двигателя, иллюстрирующий его конструкцию. Ротор имеет две концевые детали (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально смещенными друг от друга на половину шага зубьев. Их разделяет круглый постоянный магнит. Ярма имеют практически равномерный поток противоположной полярности. Статор изготовлен из многослойной стали. Двигатель, показанный на рисунке 15, имеет 4 катушки, расположенные в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A, а другая — фазой B. Для показанного двигателя каждый полюс имеет один зубец.
Количество полных шагов на революцию может быть определена из следующей формулы:
| SPR = N R X Ø | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Где: | SPR = число из ступеней FEREN | , где: | SPR = Количество по этапам FORE FOR FARE | 995 | SPR = Количество. | N R = общее количество зубьев ротора (всего для обоих хомутов) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ø = количество фаз двигателя показанный на рисунке 15, имеет обмотку диаметром 2 и ротор с 5 зубьями на ярмо, всего 10 зубьев. Рассчитайте количество шагов/об. SPR = 10 x 2 = 20 шагов/об Угол шага можно найти по следующей формуле:
Пример: Вычислите угол шага для приведенного выше двигателя. SA = 360/20 = 18° Угол шага можно рассчитать напрямую, не зная количества фаз, если известно количество зубьев статора и зубцов на полюс. На рис. 15 показано по одному зубу на полюс и всего 4 зубца на статоре.
Figure 16 показывает вращение вала при двухфазном включении. Последовательность переключения, вращение поля и вращение выходного вала показаны в Таблице VII. TABLE VII
На рис.
Гибридные шаговые двигатели доступны со следующими углами шага:
Первоначально эта статья появилась в каталоге Applied Motion Products «Motor-Drives-Controls» в 1997 году. Советы по проектированию
Советы по установке Motion
Точность (шаг) Осевой люфт Бифилярная (намотка) Двухуровневый привод (двухуровневый привод) Биполярный привод Привод с прерывателем Контроллер (шаговый двигатель) Момент фиксации Драйвер или привод Рабочий цикл Осевой люфт Трение (кулон) Трение (вязкое) Удерживающий крутящий момент (статический крутящий момент) Гибридный шаговый двигатель (HY) Гистерезис (позиционный) Индексатор Индуктивность (взаимная) Индуктивность (собственная) Мгновенная скорость пуска-останова Привод L/R Максимальная скорость реверсирования Максимальная скорость нарастания Микрошаг Осциллятор Перерегулирование Шаговый двигатель с постоянными магнитами (PM) Точность позиционирования Скорость срабатывания (коэффициент срабатывания) Втягивающий момент Момент затяжки Частота импульсов Радиальный люфт Скорость отклика (частота срабатывания) Время установления Опрокидывающий момент (удерживающий или статический момент) Угол шага Частота шагов (скорость) Пошаговая точность Коммутирующий усилитель Последовательность переключения (последовательность включения) Тепловое сопротивление Тепловая постоянная времени Кривая смещения крутящего момента Градиент крутящего момента (жесткость) Униполярный привод Шаговый двигатель с переменным сопротивлением (VR) Вязкостное демпфирование Вязкоинерционный демпфер Похожие записи
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||