Как работает ШИМ-регулятор на транзисторах. Какие схемы ШИМ-регуляторов бывают и где они применяются. Как собрать простой ШИМ-регулятор своими руками. Какие преимущества у ШИМ-регуляторов перед другими видами регуляторов.
Что такое ШИМ-регулятор и принцип его работы
ШИМ-регулятор (широтно-импульсный модулятор) — это устройство, позволяющее плавно регулировать напряжение или ток в нагрузке путем изменения скважности импульсов. Принцип работы ШИМ-регулятора основан на быстром переключении напряжения питания.
Основные компоненты ШИМ-регулятора:
- Генератор импульсов (чаще всего на микросхеме NE555 или аналогах)
- Силовой ключ (транзистор)
- Система управления ключом
- Фильтр на выходе (для сглаживания пульсаций)
Генератор вырабатывает прямоугольные импульсы определенной частоты. Система управления меняет скважность этих импульсов (отношение длительности импульса к периоду). Силовой ключ коммутирует напряжение питания на нагрузку в соответствии с управляющими импульсами. Фильтр сглаживает пульсации на выходе.
Преимущества ШИМ-регуляторов перед линейными
Главные достоинства ШИМ-регуляторов по сравнению с линейными стабилизаторами:
- Высокий КПД (до 95-98%)
- Малые габариты и вес
- Возможность как понижать, так и повышать напряжение
- Простота реализации на современной элементной базе
- Широкий диапазон регулирования (от 0 до 100%)
Благодаря этим преимуществам ШИМ-регуляторы нашли широкое применение в современной электронике, особенно в силовых цепях и системах управления двигателями.
Схемы ШИМ-регуляторов на транзисторах
Рассмотрим несколько популярных схем ШИМ-регуляторов на транзисторах:
Простейший ШИМ на NE555
Это базовая схема ШИМ-регулятора на популярной микросхеме таймера NE555:
- NE555 генерирует прямоугольные импульсы
- Потенциометр R1 регулирует скважность
- Транзистор VT1 работает как силовой ключ
- Диод VD1 защищает транзистор от обратных выбросов
Такая схема позволяет регулировать напряжение на нагрузке от 0 до напряжения питания.
ШИМ-регулятор с оптронной развязкой
Более сложная схема с гальванической развязкой силовой и управляющей части:

- Управляющая часть на NE555 питается от отдельного источника
- Оптрон PC817 обеспечивает развязку
- В силовой части использован IGBT-транзистор
- Добавлена защита по току на компараторе
Эта схема подходит для управления мощными нагрузками, в том числе от сети 220В.
Области применения ШИМ-регуляторов
ШИМ-регуляторы нашли применение во многих областях электроники и электротехники:
- Регулирование оборотов электродвигателей постоянного тока
- Управление яркостью светодиодов и ламп
- Зарядные устройства для аккумуляторов
- Импульсные блоки питания
- Управление нагревательными элементами
- Аудиоусилители класса D
В промышленности ШИМ применяется в системах автоматики, робототехнике, электроприводах станков и механизмов.
Как собрать простой ШИМ-регулятор своими руками
Для самостоятельной сборки простого ШИМ-регулятора понадобятся:
- Микросхема NE555
- Транзистор (например, IRFZ44N)
- Диод Шоттки
- Резисторы и конденсаторы по схеме
- Потенциометр
- Печатная плата или макетная доска
Порядок сборки:
- Подготовьте печатную плату по схеме
- Припаяйте компоненты, начиная с резисторов и конденсаторов
- Установите микросхему NE555 в панельку
- Припаяйте транзистор (при необходимости на радиатор)
- Подключите потенциометр
- Проверьте монтаж и отсутствие замыканий
- Подключите питание и нагрузку для тестирования
При сборке соблюдайте меры электробезопасности, особенно при работе с сетевым напряжением.
Настройка и тестирование ШИМ-регулятора
После сборки ШИМ-регулятора необходимо провести его настройку и тестирование:
- Подключите источник питания нужного напряжения
- Подсоедините нагрузку (лампу, двигатель и т.п.)
- Включите питание и проверьте работу регулятора
- Измерьте осциллографом форму выходных импульсов
- Проверьте диапазон регулирования потенциометром
- Измерьте выходное напряжение на разных режимах
- Проверьте нагрев силовых элементов
При необходимости подстройте номиналы частотозадающих элементов для получения нужной частоты ШИМ. Типичная частота для силовых применений — 20-50 кГц.
Типичные неисправности ШИМ-регуляторов
При эксплуатации ШИМ-регуляторов могут возникать следующие проблемы:
- Отсутствие регулировки или малый диапазон
- Нестабильность частоты или скважности
- Перегрев силовых элементов
- Выход из строя при коротком замыкании
- Повышенные пульсации на выходе
Для диагностики используйте осциллограф и мультиметр. Проверьте исправность компонентов, качество монтажа, соответствие номиналов. При необходимости замените вышедшие из строя элементы.
Рекомендации по выбору компонентов
При разработке ШИМ-регулятора обратите внимание на выбор ключевых компонентов:
- Силовой транзистор — с запасом по току и напряжению
- Драйвер — согласованный с выбранным транзистором
- Диоды — быстродействующие, с малым падением напряжения
- Конденсаторы фильтра — с низким ESR
- Дроссель — с запасом по току насыщения
Правильный выбор компонентов обеспечит надежную работу регулятора в заданном диапазоне мощностей и условий эксплуатации.
Шим регулятор на транзисторах
При работе с множеством различных технологий часто стоит вопрос: как управлять мощностью, которая доступна? Что делать, если её необходимо понизить или повысить? Ответом на эти вопросы служит ШИМ-регулятор. Что он собой представляет? Где применяется? И как самому собрать такой прибор?
Что такое широтно-импульсная модуляция?
3. Двоичный (двухуровневый).
4. Троичный (трехуровневый).
Что такое ШИМ-регулятор?
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности. Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком. Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B . U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора.
Схема №1
Схема №2
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных источников питания для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
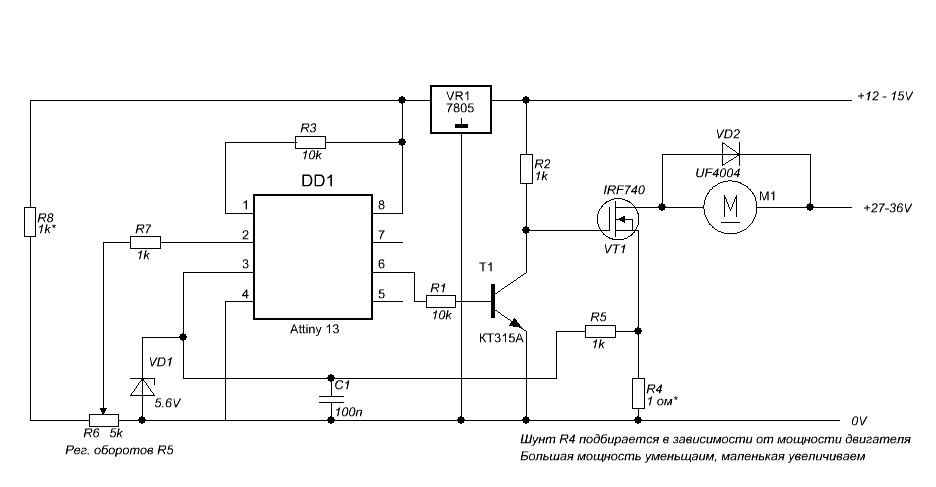
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности.
Схема ШИМ регулятора
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.
Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 – 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
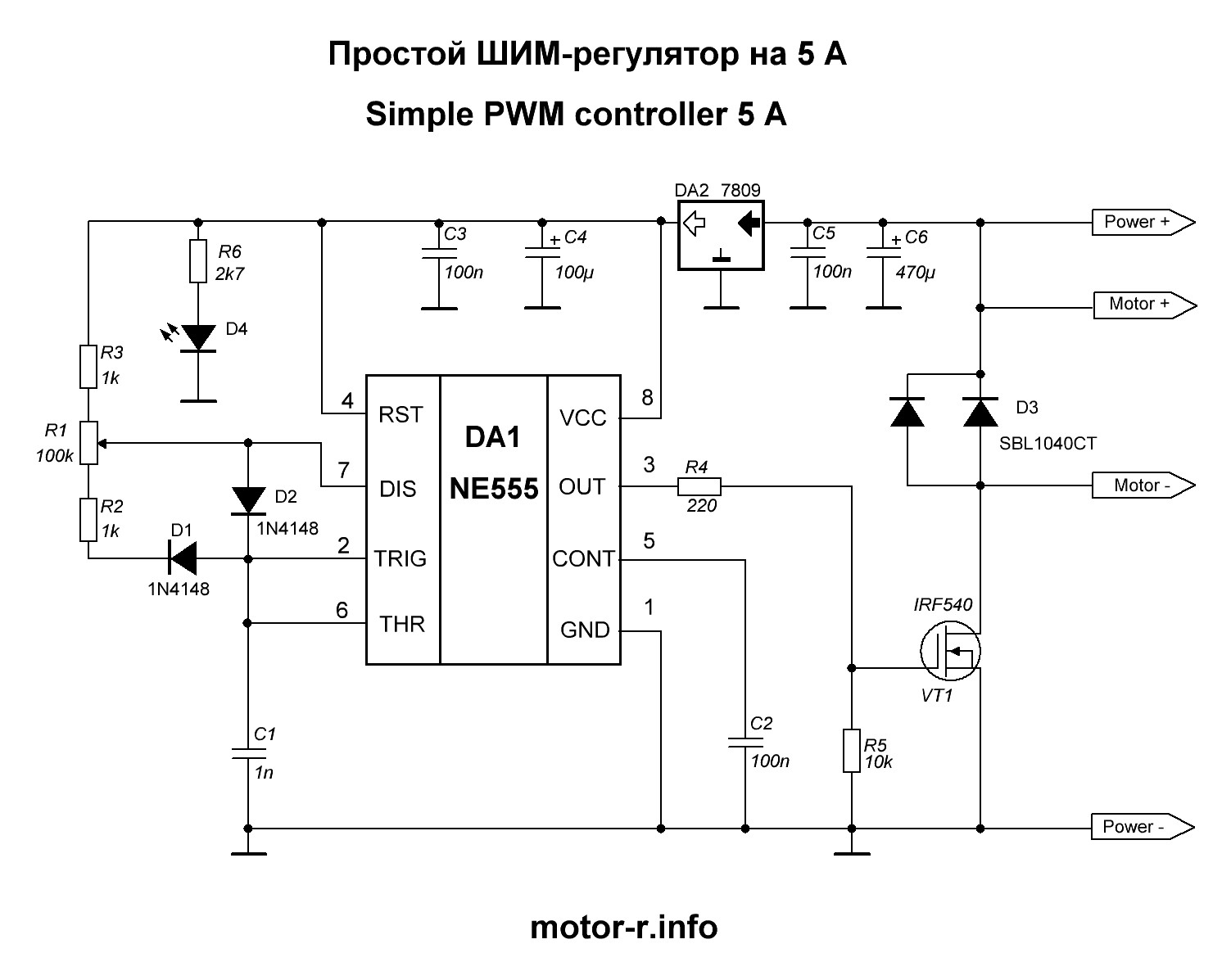
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума – открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю – система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю – система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1. Меняя отношение сопротивлений заряда/разряда – меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел – подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
Регулировать напряжение питания мощных потребителей удобно с помощью регуляторов с широтно-импульсной модуляцией. Преимущество таких регуляторов заключается в том, что выходной транзистор работает в ключевом режиме, а значить имеет два состояния – открытое или закрытое. Известно, что наибольший нагрев транзистора происходит в полуоткрытом состоянии, что приводит к необходимости устанавливать его на радиатор большой площади и спасать его от перегрева.
Известно, что наибольший нагрев транзистора происходит в полуоткрытом состоянии, что приводит к необходимости устанавливать его на радиатор большой площади и спасать его от перегрева.
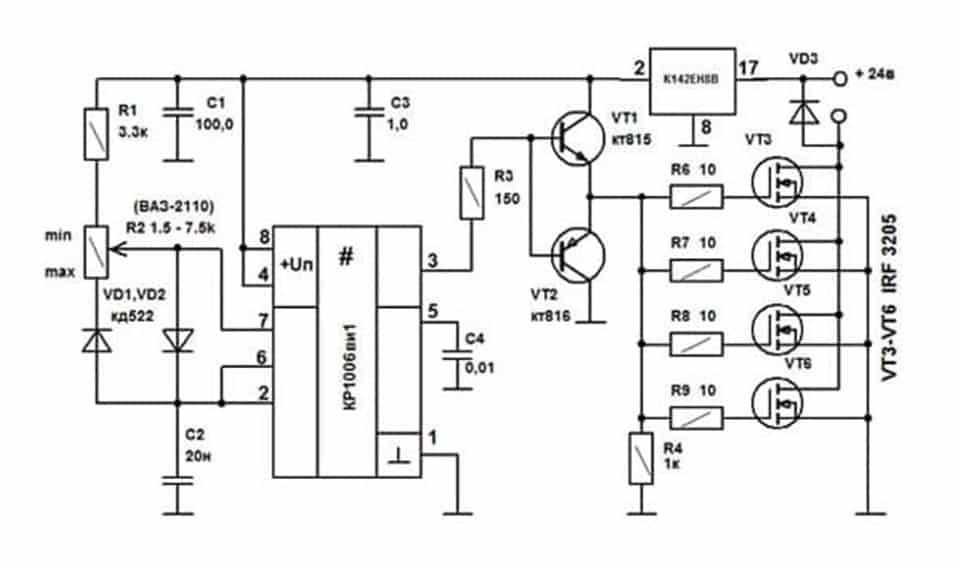
Предлагаю простую схему ШИМ регулятора. Питается устройство от источника постоянного напряжения 12В. При указанном экземпляре транзистора, выдерживает ток до 10А.
Рассмотрим работу устройства: На транзисторах VT1 и VT2 собран мультивибратор с регулируемой скважностью импульсов. Частота следования импульсов около 7кГц. С коллектора транзистора VT2 импульсы поступают на ключевой транзистор VT3, который управляет нагрузкой. Скважность регулируется переменным резистором R4. При крайнем левом положении движка этого резистора, см. верхнюю диаграмму, импульсы на выходе устройства узкие, что свидетельствует о минимальной выходной мощности регулятора. При крайнем правом положении, см. нижнюю диаграмму, импульсы широкие, регулятор работает на полную мощность.
Диаграмма работы ШИМ в КТ1
С помощью данного регулятора можно управлять бытовыми лампами накаливания на 12 В, двигателем постоянного тока с изолированным корпусом. В случае применения регулятора в автомобиле, где минус соединён с корпусом, подключение следует выполнять через p-n-p транзистор, как показано на рисунке.
Детали: В генераторе могут работать практически любые низкочастотные транзисторы, например КТ315, КТ3102. Ключевой транзистор IRF3205, IRF9530. Транзистор p-n-p П210 заменим на КТ825, при этом нагрузку можно подключать на ток до 20А!
Варианты включения ШИМ регулятора
И в заключении следует сказать, что данный регулятор работает в моей машине с двигателем обогрева салона уже более двух лет.
Мощный ШИМ регулятор для автомобиля. — Радиомастер инфо
Устройство позволяет регулировать напряжение и ток в мощных нагрузках – яркость ламп, обороты вентилятора, подогрев стекла или сидения и т.д.
Наличие мощных полевых транзисторов с сопротивлением сток-исток в открытом состоянии до 0,005 Ом позволяет в ключевом режиме управлять токами в десятки ампер без существенных потерь на нагрев.
Схем, позволяющих реализовать данные устройства много, но они в основном рассчитаны на подключение нагрузки между плюсом источника питания и стоком регулирующего транзистора. Примеры двух таких схем приведены ниже.
Простая схема ШИМ.
Схема ШИМ на микросхеме TL494.
Как известно, в автомобиле один контакт большинства нагрузок постоянно соединен с корпусом, а управление осуществляется по цепи плюса. Это не позволяет применять приведенные выше и аналогичные им схемы ШИМ. Нужно или использовать р-канальные полевые транзисторы, а выбор их существенно меньше чем n-канальных, или изменять схему.
Для управления полевым n-канальным транзистором ему на затвор нужно подать положительное относительно истока напряжение, как правило от 4в до 20В. Если у нас нагрузка будет подключена между истоком и корпусом, то потенциал истока относительно корпуса, при открытом транзисторе, будет равен почти 12В. Значит, для эффективного открывания полевика на затвор нужно подавать напряжение около 24В относительно корпуса.
За основу для реализации такого устройства была взята схема отсюда. Заменен операционный усилитель и транзисторы на более распространенные. Для получения напряжения 24…28В при макетировании я использовал дополнительный блок питания на 24В. Можно использовать готовый повышающий DC/DC преобразователь, например, такой:
Схема устройства приведена ниже:
На операционном усилителе ОР1 собран генератор прямоугольных импульсов. Я применял LM358 и LM1458. Разницы в данной схеме никакой, работают одинаково. Переменным потенциометром R1 можно изменять скважность импульсов (соотношение периода и длительности). Импульсы с выхода ОУ поступают на первый транзистор драйвера управления полевиком. Положительные импульсы открывают его. Через открытый VT1 минус поступает на базу p-n-p транзистора VT2 и также открывает его. Через отрытый VT2 плюс 24В поступают на затвор полевика. Потенциал истока +12В. Потенциал затвора +24В. На затворе на +12В выше чем на истоке. Это надежно открывает VT3 и через нагрузку течет ток. Время протекания тока через VT3, а значит и мощность в нагрузке, определяется скважностью импульсов генератора на ОУ1. Скважность импульсов можно плавно изменять потенциометром R1 что позволяет изменять мощность в нагрузке от 0 до максимума.
При работе ШИМ на индуктивную нагрузку (например, электродвигатель постоянного тока) для дополнительной защиты выходного транзистора от скачков напряжения параллельно двигателю нужно ставить диод в обратной полярности.
Для испытаний изготовлен макет.
Ниже показаны результаты испытаний.
Напряжение в нагрузке регулируется плавно от 0 до 11,16 В при напряжении источника питания 12,1 В. Потери на нагрев незначительные. При токе около 4 А температура полевика без радиатора около 40 градусов. Очевидно, что при правильном выборе полевого транзистора и организации его охлаждения схему можно успешно применять для регулировки токов десятки ампер. Ниже для информации приведена таблица с данными распространенных MOSFET n-канальных полевых транзисторов для установки в эту схему.
Материал статьи продублирован на видео:
PWM | Электроника для всех
DC-DC преобразованиеДля изменения напряжения постоянного тока с минимальными потерями используются DC-DC преобразователи, работающие по принципу Широтно-Импульсной Модуляции (ШИМ, она же PWM по басурмански). Если не читал мои прошлые статьи, где я подробно разжевал принцип работы ШИМ, то я кратенько тебе напомню. Основной принцип тут в том, что напряжение подается не сплошным потоком, как в линейных стабилизаторах, а краткими импульсами и с большой частотой.
| Готовый девайс |
То есть у тебя на выходе ШИМ контроллера, например, сначала в течении десяти микросекунд напряжение, к примеру, двенадцать вольт, потом идет пауза. Скажем, те же десять микросекунд, когда на выходе напряжения вообще нет. Затем все повторяется, словно мы быстро-быстро включаем и выключаем рубильник.
Таким образом у нас получаются прямоугольные импульсы. Если вспомнить матан, а конкретно интегрирование, то после интегрирования этих импульсов мы получим площадь под фигурой очерченной импульсами. Таким образом, меняя ширину импульсов и пропуская их через интегратор, можно плавно менять напряжения от нуля до максимума с любым шагом и практически без потерь.
В качестве интегратора служит конденсатор, он заряжается на пике, а на паузах будет отдавать энергию в цепь. Также туда всегда последовательно ставят дроссель, который тоже служит источником энергии, только он запасает и отдает ток. Поэтому такие преобразователи при небольших габаритах легко питают мощную нагрузку и при этом почти не расходуют энергию на лишний нагрев.
Если не догнал, то я для простоты переложил это в понятное «канализационное русло». Смотри на картинку, где ключевой транзистор ШИМ контроллера похож на вентиль, он открывает и закрывает канал. Конденсатор это банка, накапливающая энергию. Дроссель это массивная турбина, которая, будучи разогнанной потоком, при открытом вентиле, за счет своей инерции прогоняет воду по трубам и после закрытия вентиля.
Конечно, самостоятельно разработать такой источник питания сложно, требуется неслабое образование в области электроники, но не стоит напрягаться по этому поводу. Умные дядьки из Motorola, STM, Dallas и прочих Philips’ов придумали все за нас и выпустили уже готовые микросхемы содержащие в себе ШИМ контроллер. Тебе остается его лишь припаять и добавить обвески, которая задает параметры работы, причем изобретать самому ничего не надо, в datasheet’ах подробно расписано что и как подключать, какие номиналы выбирать, а иногда даже дают готовый рисунок печатной платы. Надо лишь немного знать английский 🙂
ШИМ-регулятор 220 В ( IGBT )
Вот уже сделан и проверен первый ШИМ-регулятор на 220 вольт и 10 ампер на микросхеме NE555. Далее по плану надо сделать такой-же простой ШИМ, только с гальванической развязкой между силовой и управляющей частями схемы. А также в качестве силового транзистора попробую использовать транзистор IGBT , а именно широко известный FGA25N120ANTD . Этот ШИМ тоже сделан на микросхеме NE555, а гальваническая развязка сделана на самом известном оптроне PC817 . Питание задающего генератора сделано от отдельного трансформатора, стоит диодный мост VD7 и стабилизатор DA4 LM7809.Транзисторы FGA25N120ANTD можно купить здесь
В качестве силового транзистора решил попробовать IGBT-транзистор. Есть такие хитрые транзисторы , которые сочетают в себе преимущества биполярных и полевых транзисторов. Выбрал известный транзистор FGA25N120ANTD. Для нормальной работы этому транзистору нужен соответствующий драйвер, который я сделал из транзисторов разной проводимости S8050 и S8550. Максимально допустимые параметры транзистора FGA25N120ANTD — напряжение коллектор-эмиттер 1200 вольт и ток до 25 ампер, что совсем неплохо.
Силовой диодный мость поставил на 25 ампер GBJ2510, диод в обратном включении параллельно нагрузке — это быстродействующий диод с максимальным током до 30 ампер и напряжением 600 вольт RHRP3060 . Питание драйвера силового транзистора сделано по бестрансформаторной схеме — это элементы VD6, VD8, R11, R12, C7, C8 и C9.
Потом провёл небольшие испытания этого ШИМ-регулятора. Сначала подключил активную нагрузку — то есть простую лампочку накаливания, затем подключил коллекторный двигатель от стиральной машины Индезит. В общем первые испытания прошли успешно. Буду дальше развивать этот проект.
Все нужные радиодетали можно приобрести здесь
Снял видео и разместил его в YouTube —
Нарисовал и проверил предварительную схему с обратной связью от таходатчика.
В общем с обратной связью работает лучше , чем без неё, но хуже чем с
Ардуино — нормально работает от 1000 оборотов в минуту.
Сделал ещё один пробный вариант — переделал силовую часть на драйвере TLP250 и добавил защиту по току на компараторе — вот что получилось:
В общем регулятор работает по-лучше чем прошлые варианты. Защита помогает первоначальный бросок тока убрать. Драйвер TLP250 заработал нормально только при напряжении питания 15 вольт.
Снял видео —
Как управлять мотором постоянного тока
Двигатель постоянного тока
Для начала рассмотрим повнимательней обычный двигатель постоянного тока. Любой двигатель имеет две основные части — ротор и статор. В коллекторном двигателе статор — неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) — вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) — возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V — Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.
Максимальной
мощности (Torque — крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента — линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.
Мы
видим, что рабочее напряжение данного
мотора — 12В, потребляемый ток под
нагрузкой — 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора — индуктивность — сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность — при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).
Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает
схема очень просто. Если открыть верхний
правый и левый нижний транзистор, то на
клемах мотора справа будет плюс, а слева
будет минус. Мотор будет крутиться в
одну сторону. Если открыть левый верхний
и правый нижний, то справа будет минус,
а слева плюс — полярность тока сменится,
и мотор будет крутиться в другую сторону.
Паразитные диоды внутри MOSFET транзисторов
будут защищать всю схему (параметры
этих диодов не очень хорошие и в реальных
схемах могут понадобиться более
быстродействующие диоды Шотке параллельно
паразитным диодам, для снижения нагрева
полевого транзистора), так что лишние
компоненты не понадобятся, кроме
искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.
N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор — открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему — добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.
Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая
частота:
Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще — лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста, а для регулирование скорости нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора. Как лучше ими управлять? На какой транзистор подавать ШИМ сигнал? Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
когда транзистор закрыт, то ток ЭДС мотора идёт через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике — будем делать плату управления 4-мя моторами для робота.
|
Широтно — импульсные регуляторы постоянного тока
Ещё две схемы ШИМ регуляторов собраны на микросхемах, предназначенных для работы в подобных устройствах. Первая конструкция в основе содержит микросхему MC34063A или MC33063A, которые предназначены для построения ключевых стабилизаторов напряжения и широко применяются в профессиональной аппаратуре.
Самая простая схема приведена на втором рисунке. Она содержит в основе очень широко распространённый интегральный таймер NE555N (КР1006ВИ1), нагруженный на затвор полевого транзистора. Обе схемы, в отличие от ранее описанных конструкций, содержат микросхемы с большим выходным током, что позволяет использовать практически любые полевые транзисторы с любой паразитной ёмкостью затвора. При токе нагрузки до 0,1А нагрузку можно включать непосредственно на выходы микросхем, не используя полевые транзисторы. Как было указано на предыдущих страницах, для полного открытия канала силового полевого транзистора на его затворе должно быть напряжение не менее 12 … 15 В, поэтому напряжение питания всех ранее рассмотренных схем не должно быть меньше 12 … 15 В. Если требуется регулировать меньшее напряжение, например 0 … 6 В для регулировки яркости переносных фонарей, вместо полевых транзисторов можно использовать биполярные NPN транзисторы, предназначенные для работы в ключевых схемах и имеющие очень малое падение напряжения в открытом состоянии. При токах нагрузки до 1А хорошо подходит транзистор КТ630А, а при больших токах ( до 10А, 30В) просто идеален КТ863А, В. В цепь базы транзисторов необходимо включить токоограничительный резистор сопротивлением 150 … 510 Ом. Все схемы , описанные в разделе, позволяют регулировать напряжение значительно большее 12 В. Для этого требуется обеспечить напряжение 12 … 15 В для питания ШИМ схемы регулирования, а полевой транзистор выбрать соответственно требуемому напряжению и току нагрузки. Смотри следующие страницы: 1. Простые ШИМ регуляторы постоянного тока на логических элементах. 2. ШИМ регуляторы на ждущих мультивибраторах и счётчиках 3. ШИМ регуляторы на операционных усилителях. 4. Мощный ШИМ-регулятор для автомобиля (для вентилятора климат-контроля или автомобильных фар )
|
Уважаемые посетители! Все материалы сайта в случае их некоммерческого использования предоставляются бесплатно, хотя автор затрачивает достаточно большие средства на их обновление расширение и размещение. Если Вы хотите, чтобы автор отвечал на Ваши письма, обновлял и добавлял новые материалы — активней используйте контекстную рекламу, размещённую на страницах — для себя Вы узнаете много нового и полезного, а автору позволит частично компенсировать собственные затраты чтобы уделять Вам больше внимания. ВНИМАНИЕ! Вам нужно разработать сложное электронное устройство? Тогда Вам сюда…
|
ШИМ регулятор напряжения 12 вольт. Две схемы
ШИМ регулятор напряжения 12 вольт. В данной статье приводится описание двух принципиальных схем регулятора основанных на широтно — импульсной модуляции (ШИМ) постоянного тока, которые реализованы на базе операционного усилителя К140УД6.
ШИМ регулятор напряжения 12 вольт — описание
Особенностью данных схем является возможность применить фактически любые имеющиеся в наличии операционные усилители, с напряжение питания на уровне 12 вольт, например, операционный усилитель LM324 или операционный усилитель LM358.
Держатель для платы
Материал: АБС + металл, размер зажима печатной платы (max): 20X14 см…
Изменяя величину напряжения на неинвертирующем входе операционного усилителя (вывод 3) можно изменять величину выходного напряжения. Таким образом, эти схемы можно использовать как регулятор тока и напряжения, в диммерах, а также в качестве регулятора оборотов двигателя постоянного тока.
Схемы достаточно просты, состоят из простых и доступных радиокомпонентов и при верном монтаже сразу начинают работать. В качестве управляющего ключа применен мощный полевой n- канальный транзистор. Мощность полевого транзистора, а так же площадь радиатора, необходимо подобрать согласно току потребления нагрузки.
Для предупреждения пробоя затвора полевого транзистора, в случае использовании ШИМ регулятора с напряжением питания 24 вольта, необходимо между затвором VT2 и коллектором транзистора VT1 подключить сопротивление величиной в 1 кОм, а параллельно сопротивлению R7 подключить стабилитрон на 15 вольт.
В случае если необходимо изменять напряжение на нагрузке, один из контактов которой подсоединен к «массе» (такое встречается в автомобиле), то применяется схема, в которой к плюсу источника питания подсоединяется сток n -канального полевого транзистора, а нагрузка подключается к его истоку.
Желательно для создания условий, при котором открытие полевого транзистора будет происходить в полной мере, цепь управления затвором должна содержать узел с повышенным напряжением порядка 27…30 вольт. В этом случае напряжение между истоком и затвором будет более 15 В.
Если ток потребления нагрузкой менее 10 ампер, то возможно применить в ШИМ регуляторе мощные полевые p- канальные транзисторы.
Электрический паяльник с регулировкой температуры
Мощность: 60/80 Вт, температура: 200’C-450’C, высококачествен…
Во второй схеме ШИМ регулятор напряжения 12 вольт меняется и вид транзистора VT1, а также меняется направление вращения переменного резистора R1. Так у первого варианта схемы, уменьшение напряжения управления (ручка потенциометра перемещается к «-» источника питания) вызывает увеличение напряжения на выходе. У второго варианта все наоборот.
kravitnik.narod.ru
Какой транзистор я должен использовать для ШИМ переключения питания 12 В в машине с 5 В на Arduino?
Чтобы найти подходящий транзистор: Сначала определитесь, какой именно. BJT: PNP или NPN? MOSFET: P-канал или N-канал? Для большинства случаев коммутации и ШИМ вы хотите использовать полевые МОП-транзисторы.
При модулировании с использованием простого входа Arduino 5V вам нужно что-то с «логическим вентилем», что означает, что он включается значительно ниже 5V. Самая простая схема — это переключатель низкого уровня, использующий N-канальный полевой МОП-транзистор. Итак, вам нужно побеспокоиться о: — Какое напряжение нужно для переключения? Допустим, верхняя граница составляет 15 В, и вы хотите удвоить ее для безопасности: напряжение DS 30 В.- Какое напряжение идет на затвор? Ардуино составляет 5 В, поэтому для безопасности назовем его 10 В GS. — Какой ток вы хотите смодулировать? Полевые МОП-транзисторы рассчитаны на максимальный ток, но вы хотите, чтобы он оставался значительно ниже этого — уменьшите его, по крайней мере, вдвое. — Насколько сильно охлаждение? Посмотрите на RDSON транзистора и умножьте на квадрат тока, чтобы получить мощность / нагрев; TO-220 может без проблем рассеивать 1 Вт на открытом воздухе; для более чем 1 Вт вам, вероятно, понадобится радиатор.
В общем, подключите все это к параметрическому поиску в Digi-Key.Введите «Мне нужно 3» и нажмите стрелку вверх, чтобы найти самый дешевый вариант (или, по крайней мере, варианты, отсортированные по цене). Готово!
Я бы порекомендовал для этого случая IRLB8721, предполагая, что ваши светодиоды будут потреблять 10А или меньше.
Примечание. Индуктивный сброс в автомобиле может быть значительно выше 30 В, на которое рассчитан транзистор. Вероятно, вы захотите замкнуть цепь светодиод + транзистор с помощью зажима <30 В макс. С номинальной мощностью 5 кВт TVS-диода. Кроме того, вы захотите защитить затвор полевого МОП-транзистора с помощью стабилитрона 9 В на землю.Используйте ту же защиту TVS, что и для светодиодов, для защиты входного напряжения Arduino, если вы используете свой собственный 7805 или аналогичный с входом 30 В. Если вы используете базовый вход Arduino, вам необходимо использовать фиксирующий TVS-диод с максимальным напряжением 16 В, потому что некоторые Arduinos не рассчитаны на максимальное входное напряжение более 16 В, а сброс нагрузки намного больше; вы не можете получить их с выдержкой на 13,6 В, что необходимо, чтобы не истощать заряженный автомобильный аккумулятор, поэтому я бы порекомендовал ваш собственный регулятор на 5 В.
Наконец: подключите резистор 10 кОм между затвором и землей, чтобы безопасно протечь затвор на землю, когда питание отключено или не определено.МОП-транзисторы действительно не любят быть «на полпути».
Частота ШИМ по умолчанию Arduino, 490 Гц, подходит для модуляции светодиодов для освещения; вы не услышите этого, если только ваша проводка не сильно ослаблена. Для больших нагрузок, индуктивных катушек, двигателей и т. Д. Частота 490 Гц довольно раздражает, и вам понадобится более высокая частота модуляции. Однако 25 мА, которые вы получаете от Arduino, не переключают силовой MOSFET достаточно быстро, чтобы работать с более высокой частотой, поэтому вам также понадобится отдельный драйвер затвора, такой как IRS2101PbF.Однако это совершенно другое уравнение дизайна.
смоделировать эту схему — Схема создана с помощью CircuitLab
Как определить максимальную частоту ШИМ для транзистора (2SK2554)
Основным фактором, определяющим скорость переключения, является не только сам полевой МОП-транзистор, но и схема, в которой он подключен.
С точки зрения затвора (т.е. PoV вашего ШИМ-сигнала) МОП-транзистор можно рассматривать как простой конденсатор.MOSFET считается включенным, когда напряжение на этом конденсаторе выше порогового напряжения \ $ V_ {th} \ $, и выключенным, когда оно ниже (это более сложно, но на данный момент это упрощенная модель).
Итак, это в основном сводится к , насколько быстро вы можете заряжать и разряжать этот конденсатор .
Чем дольше конденсатор заряжается или разряжается, тем дольше устройство переключается и тем больше мощности рассеивается в течение этого периода переключения.
Есть очень хороший документ в формате PDF от International Rectifier, который знакомит вас с основами полевых МОП-транзисторов.Раздел под названием «Gate Charge» — хорошее прочтение для решения этой проблемы.
Его можно упростить до стандартных RC-формул для расчета времени заряда конденсатора \ $ \ tau = R \ times C \ $ — емкость затвора, умноженная на сопротивление части схемы, заряжающей или разряжающей затвор. Например, если вы переключаете затвор через 100 Ом, а затвор имеет емкость 7700 пФ, время нарастания будет \ $ 100 × 7,7e-9 = 770 нс \ $ для заряда 63,2%. Отрегулируйте это время, чтобы оно соответствовало точному пороговому напряжению и, конечно же, напряжению вашего привода.
Допустим, у вас 8-битный ШИМ, это возможных 256 значений, поэтому вам нужен абсолютный минимум 770 нс * 256 временных интервалов для переключения, что составляет 197,120 мкс, или абсолютная максимальная частота 5073 Гц. Я бы ограничил его вдвое, чтобы обеспечить как минимум один временной интервал повышения уровня между включением и выключением.
Конечно, это лишь приблизительное значение. Если вы прочитаете этот PDF-файл и сравните его со значениями в таблице, вы сможете получить более точные значения.
Когда ступенька попадает в ворота МОП-транзистора, происходит некоторая задержка, прежде чем МОП полностью включится. Это необходимо учитывать, если вы не хотите получить МОП, который большую часть своего времени тратит на включение (выключение) вместо (не) проведения в своих идеальных состояниях, то есть «полностью включен» и «полностью выключен». .
Когда прибывают ступени, происходят две вещи: емкость затвор-исток должна заряжаться, и область инверсии должна формироваться под затвором. Существует своего рода «мертвая» задержка, то есть ничего не происходит ни при включении, ни при выключении, поскольку, когда заряд на затворе ниже или выше определенного порога, ток (или весь возможный ток) не может течь: эта задержка равна время задержки.
Время нарастания и спада учитывает время, необходимое току для достижения максимального значения или нуля, это как если бы вы шли по характеристикам mos в линейной (триодной) области.
Хотя время задержки, вероятно, в значительной степени постоянное, время нарастания и спада сильно зависит от напряжения затвора:
- при включении, чем выше целевое напряжение затвора , тем меньше время нарастания
- при выключении, чем ниже начальное напряжение затвора , тем меньше время спада
Иногда вы управляете затвором высоким напряжением, чтобы быстро включить его, а затем возвращаетесь к минимуму \ $ V_ {GS} \ $, который гарантирует насыщение, так что выключение также будет быстрее.
Что касается ваших таймингов, я бы начал суммировать задержку и время подъема (спада) для каждого перехода:
$$ t_ {ON} = t_ {d (on)} + t_r = 480ns \\ t_ {OFF} = t_ {d (off)} + t_f = 2100ns $$
Предположим, вы хотите потратить не более 1% своего времени на включение или выключение mos: вы берете \ $ t_ {ON} + t_ {OFF} = 2580ns \ $, умножаете это на 100, и у вас есть период: 258000ns , или 258us, то есть около 4 кГц. В комментариях я просто пренебрегал временем включения.
1% в любом случае является довольно консервативным пределом, это означает, что волна действительно выглядит прямоугольной, если вы видите ее через осциллограф.Вы, вероятно, можете подняться даже немного выше и быть в безопасности, то есть вы не тратите много.
| Возможности | Преимущества | ||||
|---|---|---|---|---|---|
|
|
||||
|
|
||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
4 объяснения схем эффективных ШИМ-усилителей
Аудиоусилители, которые предназначены для усиления аналогового аудиосигнала посредством широтно-импульсной модуляции или обработки ШИМ и с регулируемым рабочим циклом, известны под многими названиями, включая цифровой усилитель, усилитель класса D, коммутируемый усилитель и усилитель ШИМ.
Поскольку он может работать с высоким КПД, усилитель класса D стал излюбленной концепцией для мобильных приложений и систем громкой связи, где искажения незначительны.
Почему усилители ШИМ такие эффективные
Это потому, что они преобразуют аналоговый аудиосигнал в эквивалентное содержимое с ШИМ-модуляцией. Этот модулированный звуковой сигнал PWM эффективно усиливается выходными устройствами, такими как MOSFET или BJT, а затем преобразуется обратно в высокомощную аналоговую версию с использованием специальных индукторов на подключенных громкоговорителях.
Мы знаем, что полупроводниковые устройства, такие как MOSFET и BJT, «не любят» работать в неопределенных областях входного сигнала и имеют тенденцию нагреваться. Например, полевой МОП-транзистор не будет должным образом включаться, когда сигнал затвора ниже 8 В, а BJT не будут правильно реагировать при напряжении ниже 0,5 В базового напряжения, что приведет к значительному рассеиванию тепла через радиатор корпуса.
Аналоговые сигналы, являющиеся экспоненциальными по своей природе, вынуждают вышеуказанные устройства работать с неудобными и неблагоприятными потенциалами медленного нарастания и медленного спада, вызывая высокое рассеивание тепла и большую неэффективность.
Концепция усиления ШИМ, напротив, позволяет этим устройствам работать, либо полностью включив их, либо полностью выключив, без промежуточных неопределенных потенциалов. Благодаря этому устройства не излучают тепла, а усиление звука происходит с высокой эффективностью и минимальными потерями.
Преимущества цифрового усилителя по сравнению с линейным усилителем
- Цифровые усилители или усилители с ШИМ используют обработку ШИМ, и поэтому выходные устройства усиливают сигналы с минимальным тепловыделением.В линейных усилителях используется конструкция эмиттерного повторителя, и они рассеивают большое количество тепла во время усиления звука.
- Цифровые усилители могут работать с меньшим количеством устройств выходной мощности по сравнению с линейными усилителями.
- Из-за минимального тепловыделения не требуется радиатор или радиаторы меньшего размера по сравнению с линейными усилителями, которые зависят от радиаторов большого размера.
- Цифровые усилители ШИМ дешевле, легче и высокоэффективны по сравнению с линейными усилителями.
- Цифровые усилители могут работать с меньшими входами источника питания, чем линейные усилители.
В этом посте первый ШИМ-усилитель мощности, представленный ниже, работает от батареи 6 В и генерирует выходную мощность до 5 Вт. Учитывая его вопиющую выходную мощность, ШИМ-усилитель часто встречается в мегафонах.
Общая проблема мобильных усилителей AF заключается в том, что из-за их низкой эффективности трудно получить высокую мощность из низкого напряжения питания.
Однако усилитель ШИМ в нашем обсуждении имеет почти 100% КПД при уровне искажений, приемлемом для мегафонов и связанных с ними P.А. устройства. Несколько факторов, влияющих на конструкцию, объясняются ниже:
Широтно-импульсная модуляция
Принцип широтно-импульсной модуляции (ШИМ) представлен на рисунке 1.
Концепция проста: рабочий цикл прямоугольной формы. сигнал более высокой частоты управляется входным сигналом. Время включения импульса зависит от мгновенной амплитуды входного сигнала.
Количество включенного и выключенного времени в дополнение к частоте является постоянным.Следовательно, когда входной сигнал отсутствует, создается симметричный прямоугольный сигнал.
Для достижения относительно хорошего качества звука частота прямоугольного сигнала должна быть вдвое больше, чем самая высокая частота входного сигнала.
Результирующий сигнал может использоваться для питания громкоговорителя. На рис. 4 показано четкое преобразование на осциллограмме.
Верхний график показывает постфильтрацию выходного сигнала, измеренную через громкоговоритель. Амплитуда оставшегося ШИМ-сигнала, перекрывающего синусоидальную волну, мала.
Электронные переключатели как усилители
Рисунок 2 описывает стандартную работу усилителя ШИМ с помощью блок-схемы.
Предположим, что при коротком замыкании входа переключатель S a питает конденсатор C 7 током I 2 . Это происходит до тех пор, пока не будет достигнуто подходящее верхнее предельное напряжение переключения.
Затем он подключает R 7 к земле. После этого C 7 разряжается до нижнего предельного напряжения переключения S a .В результате C 7 и R 7 формируют прямоугольную волну с частотой 50 кГц.
Когда сигнал AF подается на вход усилителя, дополнительный ток I 1 относительно уменьшает или увеличивает время заряда, или увеличивает и уменьшает время разряда.
Итак, входной сигнал изменяет коэффициент заполнения прямоугольного сигнала, который виден на выходе громкоговорителя.
Есть два закона, которые необходимы для основной работы усилителя ШИМ.
- Первый — это переключатель S b , управляемый в противофазе с S a , при этом другой вывод громкоговорителя удерживается в качестве напряжения, альтернативного напряжению сигнала ШИМ.
Эта установка является результатом силового выходного каскада переключающего мостового типа. После этого, при каждой полярности, на громкоговоритель подается полное напряжение питания, так что достигается максимальное потребление тока.
2. Во-вторых, смотрим на индукторы L 1 и L 2 .Назначение катушек индуктивности — интегрировать прямоугольный сигнал и преобразовывать его в синусоидальный, как показано на графике осциллографа ранее. Кроме того, они также служат для подавления гармоник прямоугольного сигнала 50 кГц.
Высокий уровень звука при скромном дизайне
Из схемы на приведенном выше рисунке вы можете легко определить электронные компоненты, используемые на блок-схеме.
Горстка компонентов, таких как резистор R1, разделительные конденсаторы C 1 и C 4 , регулятор громкости P 1 и усилитель на основе операционного усилителя A 1 выполняет смещение для конденсаторного (или электростатического) микрофона. .
Вся эта операция создает входной сегмент усилителя ШИМ. Как обсуждалось ранее, переключатели S a и S b состоят из электронных переключателей ES 1 — ES 4 и пар транзисторов T 1 -T 3 и T 2 -T 4 .
Обозначения частей электронных компонентов, из которых состоит генератор ШИМ, относятся к тем, которые описаны на блок-схеме.
Вероятно, усилитель ШИМ необычайно эффективен, потому что выходные транзисторы не нагреваются даже при принудительном включении полного привода.Короче говоря, в выходном силовом каскаде практически отсутствует рассеяние.
Самый важный фактор, который необходимо учитывать перед выбором индукторов L 1 и L 2 , заключается в том, что они должны иметь возможность пропускать ток 3 А без насыщения.
Фактическое рассмотрение индуктивности занимает лишь второе место. Например, индукторы, использованные в этом проекте, были получены от диммера.
Назначение диодов D 3 — D 6 — сдерживать обратную ЭДС, создаваемую индукторами, до разумно безопасного значения.
Кроме того, неинвертирующий вход операционного усилителя A 1 формируется D 1 , C 3 , D 2 и R 3 . Это входное напряжение, эффективно отфильтрованное, равно половине напряжения питания.
При использовании традиционного усилителя на операционных усилителях коэффициент усиления по напряжению задается с помощью контура отрицательной обратной связи. R 4 и R 5 установят усиление на 83, чтобы обеспечить достаточную чувствительность микрофона.
Если вы используете источники сигнала с высоким сопротивлением, R 4 можно усилить по мере необходимости.
L 1 и L 2 вызывают фазовый сдвиг, и поэтому возможна обратная связь с помощью прямоугольного сигнала на коллекторе T 1 по сравнению с синусоидальным сигналом громкоговорителя.
В сочетании с C 5 операционный усилитель обеспечивает значительную интеграцию сигнала обратной связи ШИМ.
Система обратной связи снижает искажения усилителя, но не настолько сильно, чтобы вы могли использовать ее для других приложений, помимо публичного оповещения.
Обычно для усилителя класса D с низким уровнем искажений требуется значительно увеличенное напряжение питания и сложная схема.
Реализация этой настройки снизит общую эффективность схемы. Обратите внимание при выборе электронных переключателей в усилителе, так как подходят типы HCMOS.
Типичный CMOS Тип 4066 чрезвычайно медленный и не подходит для «короткого замыкания» на T 1 -T 3 и T 2 -T 4 .Более того, существует также повышенный риск перегрузки или даже необратимого повреждения усилителя.
ШИМ-усилитель для мегафонных приложений
Энтузиасты электроники предпочитают использовать усилитель класса D для питания рупорных громкоговорителей, поскольку он может производить самый громкий звук при выбранном уровне мощности.
Используя аккумуляторную батарею 6 В и громкоговоритель с барокамерой, модель усилителя была легко сконструирована.
Существующие 4 Вт выходной мощности можно было измерить в мегафоне с приличным звуковым диапазоном.
Четыре сухие батареи 1,5 В или щелочные моноэлементы были подключены последовательно для подачи напряжения на мегафон. Если вы хотите часто использовать эту установку, выберите перезаряжаемый никель-кадмиевый или гелевый аккумулятор (Dryfit).
Поскольку максимальное потребление тока мегафоном составляет 0,7 А, стандартный щелочной аккумулятор может поддерживать работу в течение 24 часов при полной выходной мощности.
Если вы планируете непостоянное использование, выбора набора сухих ячеек будет более чем достаточно.
Имейте в виду, что какой бы источник питания вы ни использовали, он не должен превышать 7 В.
Причина в том, что переключатели HCMOS в IC 1 не будут работать должным образом при этом или более высоком уровне напряжения.
К счастью, для усилителя максимальный порог напряжения питания превышает 11 В.
Конструкция печатной платы для описанного выше усилителя ШИМ класса D приведена ниже:
Другой хороший усилитель ШИМ
Хорошо спроектированный усилитель ШИМ будет содержать симметричный генератор прямоугольных волн.
Рабочий цикл этой прямоугольной волны модулируется звуковым сигналом.
Выходные транзисторы работают не линейно, а как переключатели, поэтому они либо полностью включены, либо выключены. В неактивном состоянии рабочий цикл формы волны составляет 50%.
Это означает, что каждый выходной транзистор полностью насыщен или также известен как проводящий в течение того же времени. В результате среднее выходное напряжение равно нулю.
Это означает, что если один из переключателей остается замкнутым немного дольше другого, среднее выходное напряжение будет либо отрицательным, либо положительным в зависимости от полярности входного сигнала.
Таким образом, мы можем наблюдать, что среднее выходное напряжение зависит от входного сигнала. Это связано с тем, что выходные транзисторы полностью работают как переключатели, поэтому потери мощности в выходном каскаде чрезвычайно малы.
The Design
На рисунке 1 изображена полная схема усилителя ШИМ класса D. Мы видим, что усилитель ШИМ не должен быть слишком сложным.
Входной аудиосигнал подается на операционный усилитель IC1, который функционирует как компаратор. Эта установка приводит к нескольким триггерам Шмитта, которые подключены параллельно к схеме.
Они здесь по двум причинам. Во-первых, должна быть «прямоугольная» форма волны, а во-вторых, для выходного каскада требуется соответствующий базовый ток возбуждения. На этом этапе установлены два простых, но быстрых транзистора (BD137 / 138).
Весь усилитель колеблется и генерирует прямоугольную волну. Причина в том, что один вход компаратора (IC1) подключен к выходу через RC-цепь.
Кроме того, оба входа IC1 смещены к первой половине напряжения питания за счет использования делителя напряжения R3 / R4.
Каждый раз, когда на выходе IC1 низкий уровень, а на эмиттерах T1 / T2 высокий уровень, происходит зарядка конденсатора C3 через резистор R7. В то же время на неинвертирующем входе будет повышение напряжения.
Как только это возрастающее напряжение пересекает уровень инвертирующего пути, выход IC1 переключается с низкого на высокий.
В результате эмиттеры T1 / T2 переключаются с высокого на низкий. Это условие позволяет C3 разряжаться через R7, и напряжение на плюсовом входе падает ниже напряжения на минусовом входе.
Выход IC1 также возвращается в низкое состояние. В конце концов, выходной сигнал прямоугольной формы создается с частотой, определяемой R7 и C3. Приведенные значения генерируют колебания на частоте 700 кГц.
Используя осциллятор, мы можем модулировать частоту. Уровень инвертирующего входа IC1, который обычно используется в качестве эталона, не остается постоянным, а определяется звуковым сигналом.
Кроме того, амплитуда определяет точную точку, в которой выходной сигнал компаратора начинает изменяться.Следовательно, «толщина» прямоугольных волн регулярно модулируется звуковым сигналом.
Чтобы усилитель не работал как передатчик 700 кГц, на его выходе должна выполняться фильтрация. Сеть LC / RC, состоящая из L1 / C6 и C7 / R6, хорошо выполняет роль фильтра.
Технические характеристики
- Оснащенный нагрузкой 8 Ом и напряжением питания 12 В усилитель генерировал 1,6 Вт.
- При использовании 4 Ом мощность увеличивалась до 3 Вт. не требуются.
- Доказано, что гармонические искажения необычно низки для такой простой схемы.
- Общий уровень гармонических искажений был ниже 0,32% в измеренном диапазоне от 20 Гц до 20 000 Гц.
На рисунке ниже вы можете увидеть печатную плату и расположение деталей усилителя. Время и стоимость создания этой схемы очень низкие, поэтому она представляет собой отличный шанс для тех, кто хочет лучше понять ШИМ.
Список деталей
Резисторы:
R1 — 22k
R2, R7 — 1M
R3, R4 — 2.2k
R6 — 420 k
R6 — 8,2 Ом
P1 = 100k логарифмический потенциометр
Конденсатор:
C1, C2 — 100 нФ
C3 — 100 пФ
C4, C5 — 100 мкФ / 16 В
C6 = 68 нФ
C7 — 470nF
C8 — 1000p / 10 V
C9 — 2n2
Полупроводники:
IC1 — CA3130
IC2- 00106
T1 = BD137
T2 — BD138
Разное:
L1 = 39 мкГн индуктивность
Простая схема 3 транзистора, усилитель
Превосходная эффективность усилителя PWM такова, что выходная мощность 3 Вт может быть получена с BC107, используемым в качестве выходного транзистора.Более того, он не требует радиатора.
Усилитель содержит генератор ширины импульса, управляемый напряжением, работающий на частоте около 6 кГц и обеспечивающий выходной каскад класса D.
Есть только два сценария — полностью включен или полностью выключен. Из-за этого рассеиваемая мощность невероятно мала и, как следствие, обеспечивает высокий КПД. Форма выходного сигнала не похожа на входной.
Однако интеграл выходных и входных сигналов пропорционален друг другу относительно времени.
Из представленной таблицы значений компонентов видно, что можно изготовить любой усилитель мощностью от 3 до 100 Вт. При этом можно достичь большей мощности до 1 кВт.
Недостаток в том, что он создает около 30% искажений. В результате усилитель можно использовать только для усиления звука. Он подходит для систем громкой связи благодаря невероятно понятной речи.
Цифровой операционный усилитель
Следующая концепция показывает, как использовать базовый набор триггеров сброса IC 4013 для преобразования аналогового аудиосигнала в соответствующий сигнал ШИМ, который затем может быть подан на полевой МОП-транзистор для желаемого усиления ШИМ. .
Вы можете использовать половину корпуса 4013 в качестве усилителя с цифровым выходом с рабочим циклом, пропорциональным желаемому выходному напряжению. Когда вам понадобится аналоговый выход, подойдет простой фильтр.
Вы должны следить за тактовыми импульсами, как указано, и они должны быть значительно выше по частоте, чем желаемая полоса пропускания. Коэффициент усиления равен R1 / R2, тогда как время R1R2C / (R1 + R2) должно быть больше, чем период тактовых импульсов.
Приложения
Есть много способов использования схемы.Вот некоторые из них:
- Сбор импульсов от точки перехода через ноль сети и включение симистора с выходом. В результате теперь у вас есть реляционное управление мощностью без RFI.
- Используя быстрые часы, переключите транзисторы драйвера с выходом. В результате получился высокоэффективный звуковой усилитель с ШИМ.
ШИМ-усилитель 30 Вт
Принципиальная схема аудиоусилителя 30 Вт класса -D представлена в следующем PDF-файле.
Операционный усилитель IC1 усиливает входной аудиосигнал с помощью потенциометра VR1 с регулируемой громкостью.Сигнал PWM (широтно-импульсная модуляция) генерируется путем сравнения аудиосигнала с треугольником 100 кГц. Это осуществляется через компаратор 1С6. Резистор RI3 используется для обеспечения положительной обратной связи, а C6 фактически вводится для увеличения времени работы компаратора.
Выход компаратора переключается между крайними значениями напряжения ± 7,5 В. Подтягивающий резистор R12 обеспечивает напряжение + 7,5 В, в то время как -7,5 В поступает от внутреннего транзистора с открытым эмиттером IC6 операционного усилителя на выводе 1. Пока этот сигнал переходит на положительный уровень, транзистор TR1 работает как клемма стока тока.Этот сток тока вызывает увеличение падения напряжения на резисторе R16, которого становится достаточно, чтобы включить полевой МОП-транзистор TR3.
Когда сигнал переключается на отрицательную крайность. TR2 превращается в источник тока, что приводит к падению напряжения на R17. Этого падения становится достаточно, чтобы включить TR4. Как правило, полевые МОП-транзисторы TR3 и TR4 запускаются поочередно, генерируя сигнал ШИМ, который переключается между +/- 15 В.
На этом этапе становится важным вернуть или преобразовать этот усиленный ШИМ-сигнал в хорошее воспроизведение звука, которое может быть усиленным эквивалентом входного аудиосигнала.
Это достигается путем создания среднего значения рабочего цикла ШИМ через фильтр нижних частот Баттервора 3-го порядка, имеющий частоту среза (25 кГц) значительно ниже базовой частоты треугольника.
Это действие приводит к огромному затуханию на частоте 100 кГц. Полученный окончательный выходной сигнал преобразуется в аудиовыход, который представляет собой усиленную репликацию входного аудиосигнала.
Генератор треугольной волны через конфигурацию схемы 1C2 и 1C5, где IC2 работает как генератор прямоугольной волны с положительной обратной связью, подаваемой через R7 и R11.Диоды от DI до D5 работают как двунаправленный зажим. Это фиксирует напряжение примерно на уровне +/- 6 В.
Идеальный интегратор создается за счет предустановки VR2, конденсатора C5 и IC5, который преобразует прямоугольную волну в треугольную. Preset VR2 обеспечивает функцию регулировки частоты.
Выход 1C5 на (вывод 6) обеспечивает обратную связь на 1C2, а резистор R14 и предварительно установленный VR3 функционируют как гибкий аттенюатор, позволяющий регулировать уровень треугольной волны по мере необходимости.
После завершения полного цикла необходимо настроить VR2 и VR3, чтобы обеспечить высочайшее качество вывода звука.Набор обычных 741 ОУ для 1C4 и IC3 можно использовать в качестве буферов с единичным усилением для подачи питания +/- 7,5 В.
Конденсаторы C3, C4, C11 и C12 используются для фильтрации, а остальные конденсаторы используются для развязки источника питания.
Схема может питаться от двойного источника питания +/- 15 В постоянного тока, который сможет управлять громкоговорителем мощностью 30 Вт 8 Ом через каскад LC с использованием конденсатора C13 и катушки индуктивности L2. Обратите внимание, что для MOSFET TR3 и TR4, вероятно, могут потребоваться небольшие радиаторы.
ШИМ-усилитель с автоколебательной концепцией
Вентили с N3 по N8 образуют компаратор, а два двухтактных усилителя образуют усилители. Затворы буферного инвертора N3 — N8 подключены параллельно, чтобы обеспечить большее усиление сигнала с этого каскада.
Контрольные светодиоды с ШИМ и транзисторами
У меня есть три транзистора, каждый из которых подключен к 5 светодиодам вот так.
Я пытаюсь увеличивать и уменьшать ток через светодиоды линейным образом, увеличивая ток в базе транзистора.Поэтому, если я уменьшу 3 мА до 1,5 мА, я хочу, чтобы ток светодиода увеличился с 16,25 мА до 8,125 мА. Однако в настоящее время эта установка этого не делает. Ток в светодиодах не уменьшается значительно, пока источник тока не составляет небольшой процент от его текущего значения.
Источники 3 мА на моей схеме моделируют выходы ШИМ микроконтроллера. (Их максимальный ток.) Мне нужно контролировать яркость светодиодов, изменяя рабочий цикл каждого ШИМ.
Я бы предпочел не использовать драйвер светодиода.Я также знаю об использовании таблиц поиска для исправления экспоненциального множителя. Это мой единственный вариант?
Ваша проблема довольно проста. Токоограничивающий резистор слишком велик. Если ваши светодиоды действительно пропускают столько тока, сколько вы утверждаете, напряжение на резисторе будет 0,08 x 30 или 2,4 вольт. При этом на светодиодах остается (самое большее) 0,9 вольт, и этого недостаточно, чтобы они вообще давали много света.
Вам следует изменить размер резистора с учетом прямого напряжения (Vf) светодиодов, чтобы обеспечить максимальный ток при полностью открытом транзисторе и падении напряжения на транзисторе примерно от 0,1 до 0,2 вольт. Либо так, либо увеличьте напряжение источника.
После того, как вы это сделаете, у вас все равно будут проблемы. При параллельном включении 5 светодиодов, тот, у которого наименьший Vf, будет потреблять ток и светиться ярче, чем другие. В худшем случае это приведет к тому, что он станет более горячим, его Vf упадет, и он будет потреблять еще больше тока и станет еще ярче.При этом пределе наихудшего случая он будет потреблять почти в 5 раз больше тока, чем вы ожидаете. Если этот уровень слишком высок, светодиод может не открыться, и процесс будет повторяться по очереди с другими 4, затем с другими 3 и т. Д.
Наконец, вам необходимо изучить данные вашего транзистора и определить его коэффициент усиления по току. Это та жизнь, которую Игнасио сослался на свой комментарий. Чтобы усложнить жизнь, получите изменения с текущим уровнем, в чем вы убедитесь, если обратите внимание на таблицу данных. Но предположим, что коэффициент усиления равен 100, что является хорошей отправной точкой для современных сигнальных транзисторов NPN, работающих при токе менее 100 мА.Имейте в виду, что из-за вашего большого ограничительного резистора ток никогда не приблизится к 80 мА, как вы думаете. Скажем, 10 мА, для начала. Тогда любой базовый ток выше (10 мА / 100) не будет иметь никакого значения для тока светодиода, поскольку транзистор потребляет столько тока, сколько может, а ток ограничен резистором и светодиодами. 10 мА / 100 — это 0,1 мА, или 3% от номинального тока, и полностью соответствует тому, что вы видите.
Чтобы проверить это, запустите свою схему и подключите коллектор транзистора к земле.Теперь измерьте напряжение на резисторе 30 Ом и разделите его на 30, чтобы получить общий максимальный ток. Разделите это примерно на 10, чтобы получить необходимый базовый ток. Чтобы понять, почему вы делите на 10, а не на 100, начните узнавать о насыщении транзисторов.
Почему сервоприводы используют ШИМ и как это работает?
Основная функция сервопривода заключается в преобразовании или усилении сигналов малой мощности от контроллера в сигналы большей мощности, подаваемые на обмотки двигателя.Сервоприводы (также называемые сервоусилителями) могут быть линейными или переключаемыми, в зависимости от того, как мощность подается на двигатель от переключающих устройств (обычно IGBT или MOSFET) в инверторной секции привода.
Линейный сервоусилитель позволяет напряжению непрерывно течь к двигателю, поддерживая в некоторой степени постоянно включенными транзисторы в инверторной секции привода. Напротив, переключающий усилитель, или ШИМ (широтно-импульсная модуляция), включает и выключает транзисторы в секции инвертора, чтобы модулировать напряжение, поступающее на двигатель.
Так зачем использовать импульсный или ШИМ-привод, а не линейный? Основная причина — эффективность. Поскольку транзисторы в линейном приводе всегда включены, они сильно рассеивают мощность и, в свою очередь, могут выделять значительное количество тепла. Это снижает эффективность и увеличивает габариты, поскольку для защиты транзисторов приводу требуется подходящий радиатор или охлаждающий механизм.
Привод PWM включает и выключает транзисторы в секции инвертора, чтобы подать на двигатель смоделированное синусоидальное напряжение.Изображение предоставлено: М. Пеллетье, Яскава
ШИМ-приводы включают и выключают транзисторы с очень высокой частотой — обычно от 10 до 20 Гц — создавая серию прямоугольных импульсов, имитирующих аналоговый синусоидальный сигнал. .
Рабочий цикл импульсов — отношение времени включения к общему времени переключения (время включения + время выключения) — определяет ширину импульса, которая, в свою очередь, определяет, сколько напряжения и тока подается на двигатель.
Рабочий цикл сигнала ШИМ относится к отношению времени включения (или времени высокого уровня) к общему времени переключения.Изображение предоставлено: Performance Motion Devices
Поскольку транзисторы в ШИМ-приводе работают в своей линейной или активной области — другими словами, они либо полностью включены, либо полностью выключены — рассеивание мощности и тепловыделение относительно низки, особенно по сравнению с операторской ШИМ. А более быстрое переключение ШИМ повышает эффективность, поскольку транзисторы проводят меньше времени в своей линейной области. Однако это быстрое переключение вызывает высокое dv / dt (изменение напряжения), что может привести к нежелательным эффектам, таким как шум, мешающий работе другого оборудования, и перенапряжения, известные как отраженные волны, поэтому следует применять надлежащие методы фильтрации и экранирование кабеля. .
Импульсы для привода ШИМ могут быть созданы одним из двух способов. В традиционном методе, часто называемом ШИМ на основе несущей, импульсы ШИМ создаются с использованием треугольного сигнала, который представляет частоту переключения инвертора, вместе с синусоидальным сигналом, создаваемым генератором ШИМ.
При использовании ШИМ на основе несущей модулированные импульсы ШИМ (внизу) создаются из треугольного сигнала, который представляет собой частоту переключения инвертора, и синусоидального сигнала, создаваемого генератором ШИМ.Изображение предоставлено: Rockwell Automation
Более продвинутый метод создания импульсов ШИМ известен как пространственно-векторная модуляция или SVM (иногда называемая широтно-импульсной модуляцией пространственно-вектора или SVPWM). Этот метод использует векторные представления трехфазных напряжений и вычисляет требуемый рабочий цикл переключателей инвертора для синтеза опорного выходного напряжения. (В этой статье более подробно объясняются теория и принцип действия пространственно-векторной модуляции.) Пространственно-векторная модуляция позволяет лучше использовать напряжение на шине, обеспечивая более высокое напряжение на двигатель с меньшими общими гармоническими искажениями и меньшими колебаниями крутящего момента.
Преобразователи частоты (ЧРП) для асинхронных двигателей переменного тока также используют методы ШИМ для подачи напряжения на двигатель. В этих приложениях привод управляет как рабочим циклом, так и частотой импульсов, чтобы управлять напряжением и скоростью двигателя.
(PDF) Анализ производительности инвертора с тремя транзисторными источниками напряжения с использованием различных методов ШИМ
точно так же, как метод ШИМ с вектором нулевого пространства для
как с традиционной топологией, так и с топологией TTVSI.
ТАБЛИЦА II Сводка результатов моделирования
ST-PWM THPWM SVPWM
(TH)
SVPWM
Текущий
(Amp)
TTVSI 93,65 107,4 108,9 109,1
1103CVSI
(%)
TTVSI 9,75 7,46 7,37 7,38
CVSI 6,51 5,49 5,28 5,26
Line Vo
— напряжение (В)
TTVSI 165,5 190,7 191,8 192,1
CVSI 171,4 196.0 197,8 197,9
Такая же результирующая тенденция наблюдается для значения выходного тока
и значения полного гармонического искажения
(THD) для частоты переключения 2400 Гц. Из всех
данные, полученные с помощью моделирования, показывают, что
с точки зрения производительности обычная VSI дает очень
, немного лучшие результаты, чем TTVSI. Кроме того, в линии
с использованием другой схемы ШИМ было обнаруженонапряжений,
очень похожи на обычную топологию (только 2.На 5%
наменьше). Причина небольших различий заключается в том, что время восстановления тиристора
было в 6 раз больше, чем указано в паспорте. Кроме того, это было достигнуто путем прерывания
части опорного сигнала основной гармоники.
Однако, из-за гибкости написания кода в эксперименте
, основной сигнал не требуется для отключения
, чтобы обеспечить время восстановления тиристора. Таким образом,
с небольшой регулировкой, THD выходного тока,
выходного тока и линейное напряжение могут быть улучшены
.
V. ВЫВОДЫ
Основная цель данной статьи — проанализировать характеристики
схемы TTVSI с использованием различных методов ШИМ
. Производительность и осуществимость были подтверждены
с помощью моделирования на системном уровне. По производительности
напоминает обычные топологии, но с некоторыми преимуществами
. Эта недорогая топология обещает
быть альтернативным решением для системы
средней и высокой мощности, где полупроводниковые электронные переключатели очень дороги.Наряду с тем, что тиристоры
коммутируются, естественно, без каких-либо внешних схемотехнических требований с помощью
средств коммутации транзисторов с использованием различных методов модуляции
. Практическая реализация
TTVSI могла бы обеспечить большее использование напряжения промежуточного контура
, поскольку для этого требуется значительно меньшее общее время простоя
, чем для обычного 6-транзисторного инвертора. То есть, в отличие от
обычного VSI, этот TTVSI требует времени задержки
только при переходе через нуль выходного тока, поскольку
состоит только из одного транзистора на фазу.Одним из недостатков топологии
является то, что одиночный транзисторный переключатель
работает в течение полного цикла. Следовательно, коммутационные потери схемы
такие же, как и в традиционной топологии
VSI. Кроме того, размер одиночного транзистора
будет вдвое больше, чем размер одиночного транзистора
с традиционной топологией. Тем не менее, будущие темы исследований
будут касаться улучшения техники переключения,
уменьшения содержания гармоник и минимизации коммутационных потерь
.Более того, TTVSI может быть исследован для ряда будущих приложений энергосистемы
в системах средней мощности.
ПОДТВЕРЖДЕНИЕ
Это исследование было поддержано программой BK21PLUS
через Национальный исследовательский фонд Кореи
, финансируемый Министерством образования.
ССЫЛКИ
[1] Н. Мохан, У. П. Роббин и Т. Унделанд, «Power
Электроника: преобразователи, приложения и дизайн», 2-е изд.,
New York: Wiley, 1995.
[2] BK Bose, «Силовая электроника и преобразователи частоты
: технологии и приложения», IEEE Press, 1997.
[3] Р. Диксит, Б. Сингх и др., «Приводы с регулируемой скоростью:
Обзор различных топологий инверторов», International
Journal of Reviews in Computing, 2012, Vol. 09, pp. 54-6
[4] Хосе Миллан, Филипп Годиньон и др., «Обзор
широкозонных силовых полупроводниковых устройств», IEEE
Trans.Power Electron., Т. 29, нет. 5, pp. 2155–2163,
May. 2014
[5] С.М. Саджад Хоссейн Рафин, Т.А. Липо и Бьюнг-ил
Квон, «Новая топология инвертора источника напряжения
с уменьшенным количеством транзисторов и естественным использованием
коммутируемых тиристоров с простой коммутацией», в
Труды 22-го IEEE Int. Сим. по силовой электронике,
Электрические приводы, автоматизация и движение, SPEEDAM,
июнь 2014 г., стр.637-642
[6] С.
