Как работает ШИМ-регулятор оборотов двигателя постоянного тока. Какие существуют схемы ШИМ-регуляторов. Каковы основные характеристики и преимущества ШИМ-регуляторов. Как выбрать и использовать ШИМ-регулятор для управления двигателем.
Принцип работы ШИМ-регулятора оборотов двигателя
ШИМ-регулятор (широтно-импульсный модулятор) позволяет плавно регулировать обороты двигателя постоянного тока путем изменения скважности управляющих импульсов. Рассмотрим основной принцип его работы:
- На двигатель подаются импульсы напряжения фиксированной частоты (обычно 1-20 кГц)
- Изменяется длительность (ширина) импульсов — отсюда название «широтно-импульсная модуляция»
- Чем шире импульс, тем больше среднее напряжение на двигателе и выше обороты
- При узких импульсах среднее напряжение и обороты снижаются
Таким образом, регулируя ширину импульсов, можно плавно изменять обороты двигателя от минимальных до максимальных. Преимущества такого способа регулировки:
- Высокий КПД, так как транзистор работает в ключевом режиме
- Плавность регулировки
- Возможность получения очень низких оборотов
- Простота схемотехнической реализации
Основные схемы ШИМ-регуляторов оборотов
Существует несколько базовых схем ШИМ-регуляторов для управления двигателями постоянного тока:
1. На основе таймера NE555
Простейшая схема на популярной микросхеме-таймере:
- Частота ШИМ задается RC-цепочкой
- Скважность регулируется переменным резистором
- Выходной транзистор управляет двигателем
- Диапазон питания 5-15В, ток до 1-2А
2. На микроконтроллере
Более функциональная схема с программным управлением:
- ШИМ-сигнал формируется таймером микроконтроллера
- Гибкая настройка частоты и скважности
- Возможность добавления дополнительных функций
- Требует программирования МК
3. На специализированной ШИМ-микросхеме
Промежуточный вариант между простой и программируемой схемой:
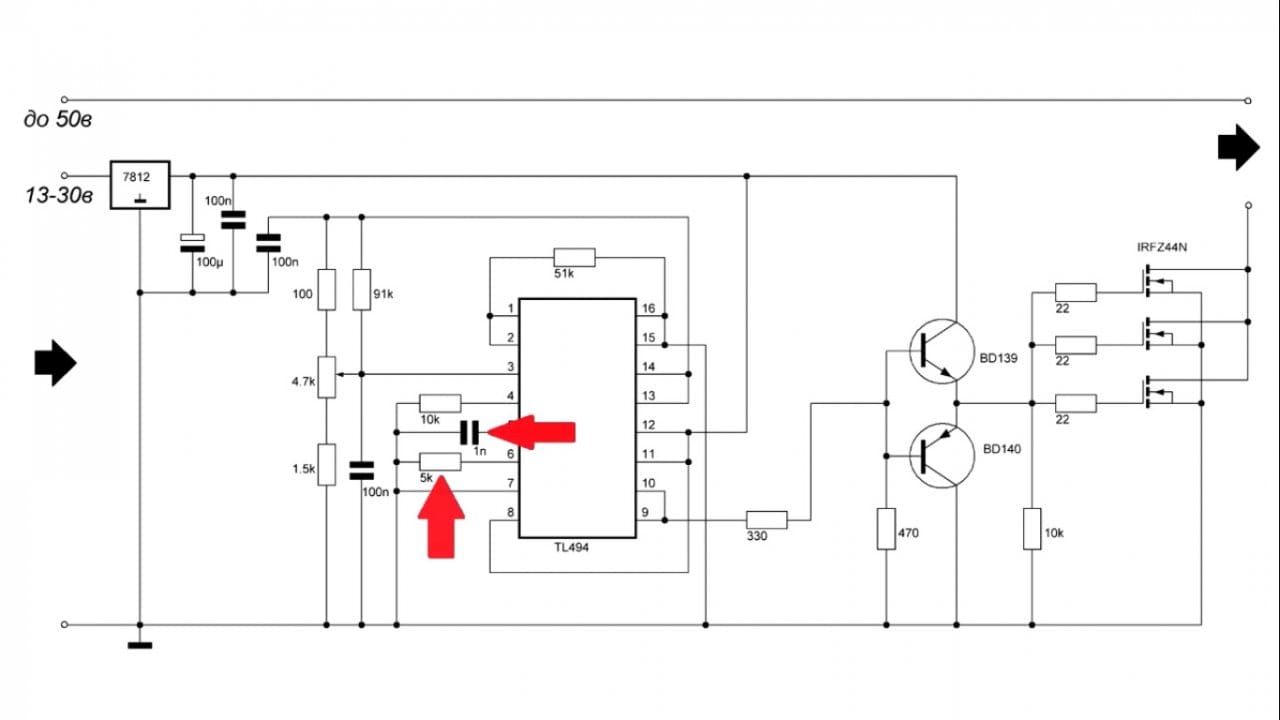
- Используются микросхемы TL494, UC3842 и аналоги
- Встроенный ШИМ-модулятор
- Настройка частоты внешними компонентами
- Регулировка скважности аналоговым сигналом
Ключевые характеристики ШИМ-регуляторов
При выборе или разработке ШИМ-регулятора оборотов двигателя стоит обратить внимание на следующие параметры:

- Диапазон входного напряжения — обычно 5-60В
- Максимальный ток нагрузки — от единиц до десятков ампер
- Частота ШИМ — типично 1-20 кГц
- Диапазон регулировки скважности — желательно 0-100%
- Наличие защиты от КЗ, перегрузки, перегрева
- Плавный пуск двигателя
- Возможность реверса
Чем шире диапазон регулировки и выше частота ШИМ, тем плавнее и эффективнее управление двигателем.
Преимущества использования ШИМ-регуляторов
ШИМ-регуляторы имеют ряд важных преимуществ по сравнению с другими способами управления оборотами:
- Высокий КПД за счет ключевого режима работы
- Плавность регулировки во всем диапазоне
- Возможность получения очень низких оборотов
- Простота схемотехнической реализации
- Малые габариты и вес
- Низкое тепловыделение
- Возможность точного управления моментом
Это делает ШИМ-регуляторы оптимальным выбором для управления коллекторными двигателями постоянного тока в широком спектре применений.
Применение ШИМ-регуляторов оборотов
ШИМ-регуляторы нашли широкое применение в различных областях для управления двигателями постоянного тока:
- Электроинструмент (дрели, шуруповерты)
- Автомобильная электроника (вентиляторы, стеклоподъемники)
- Бытовая техника (кухонные комбайны, миксеры)
- Промышленные приводы
- Робототехника и модели
- Системы вентиляции и кондиционирования
- Насосное оборудование
Везде, где требуется плавное и экономичное управление оборотами коллекторного двигателя постоянного тока, оптимальным выбором будет ШИМ-регулятор.
Как выбрать ШИМ-регулятор оборотов
При выборе готового ШИМ-регулятора следует учитывать следующие факторы:
- Напряжение питания и мощность двигателя
- Требуемый диапазон регулировки оборотов
- Необходимость дополнительных функций (реверс, защита)
- Условия эксплуатации (температура, влажность)
- Габаритные ограничения
- Стоимость
Важно правильно рассчитать требуемый ток регулятора с запасом 20-30% от номинального тока двигателя. Также стоит обратить внимание на качество изготовления и наличие защитных функций.
Настройка и подключение ШИМ-регулятора
Процесс подключения и настройки типового ШИМ-регулятора оборотов включает следующие шаги:

- Подключение питания регулятора (соблюдая полярность)
- Подключение двигателя к силовым выводам
- Установка регулятора скорости (потенциометра)
- Настройка минимальных и максимальных оборотов
- Проверка работы защитных функций
- Настройка плавности регулировки
При подключении важно использовать провода достаточного сечения и качественные соединения. Настройка производится согласно инструкции на конкретную модель регулятора.
Заключение
ШИМ-регуляторы являются современным и эффективным решением для управления оборотами двигателей постоянного тока. Они обеспечивают плавную регулировку, высокий КПД и широкие функциональные возможности. При правильном выборе и настройке ШИМ-регулятор позволяет оптимизировать работу электропривода практически в любой области применения.
Регулятор оборотов минидрели / Блог компании MakeItLab / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность. Порог включения задается резистором RV2.
Для питания ОУ используется линейный стабилизатор.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
- C2 — конденсатор, 3.3нФ, 1206
- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206. Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
- R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
- XS1 — клемма, 2 конт, шаг 3,81мм
Также мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
Стоит начинать сборку самой платы с установки всех компонентов на стороне платы без подстроечных резисторов, а затем на обратной стороне. Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и «+36V». Минус источника входного напряжения подключается к контакту «GND», а плюс к «+36V». Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены. И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на основной странице проекта.
Спасибо за проявленный интерес!
Motor Control: ШИМ-регулятор
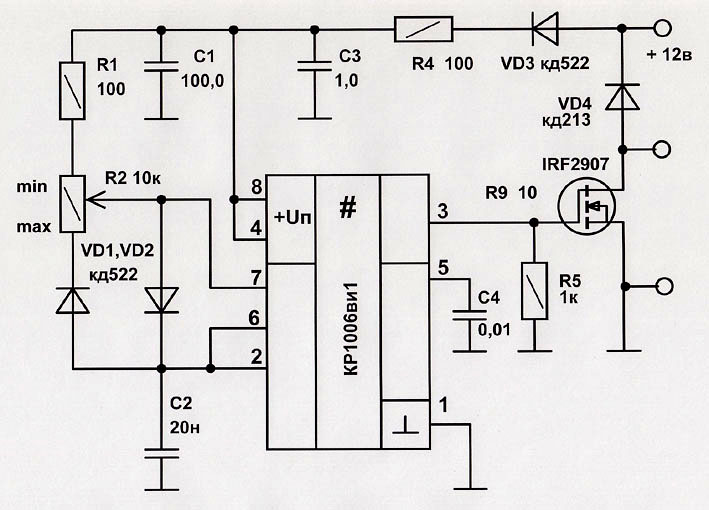
Управление двигателем постоянного тока проще всего организовать с помощью ШИМ — регулятора. ШИМ — это широтно-импульсная модуляция, в английском языке это называется PWM — Pulse Width Modulation. Теорию я подробно объяснять не буду, информации полно в интернете. Своими словами — если у нас есть двигатель постоянного тока на 12 вольт — то мы можем регулировать обороты двигателя изменяя напряжение питания. Изменяя напряжение питания от нуля до 12 вольт будут изменятся обороты двигателя от нуля до максимальных. В случае с ШИМ-регулятором мы будем изменять скважность импульсов от 0 до 100 % и это будет эквивалентно изменению напряжения питания двигателя и соответственно будут изменятся обороты двигателя.Рассмотрим первый ШИМ-регулятор на 5 ампер. Есть такая самая любимая микросхема всех радиолюбителей — это таймер NE555 ( или советский аналог КР1006ВИ). Вот на этой микросхеме и собран ШИМ-регулятор. Кроме таймера здесь я использую стабилизатор на 9 вольт LM7809 , мощный полевой транзистор с N-каналом IRF540, сдвоенный диод Шоттки, а также другие мелкие детали. Схема по которой собран этот регулятор всем известна и очень популярна.
Печатку этой платы можно скачать — ШИМ 5А
В более мощном исполнении я применяю просто параллельное включение нескольких полевых транзисторов IRF540 и более мощный сдвоенный диод Шоттки. В остальном всё аналогично.
Печатку этой платы можно скачать — ШИМ 10А Подключение ШИМ-регулятора очень простое. Вы видите 4 клеммы — две клеммы для подачи питания и , и две клеммы для подключения мотора и .
Сделал ещё ШИМ-регулятор с защитой по току. Для этих целей использовал распространенный операционный усилитель LM358 и два оптрона PC817. При превышении тока, который мы задаём подстроечником R12, срабатывает триггер-защёлка на операционнике DA3.1, оптронах DA4 и DA5 и блокируется генерация импульсов по 5 ноге таймера NE555. Чтобы снова запустить генерацию нужно кратковременно снять питание со схемы с помощью кнопки S1.
ШИМ-регуляторы все работоспособны , проверил их работу с помощью двигателя от шуруповёрта.
Снял видео —
Разработал нормальные платы по этим схемам и снял 2 новых видео.
Первое видео —
Второе видео —
Ссылки для заказа таких плат на сайте pcbway
| Определить языкАзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский | АзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский |
Звуковая функция ограничена 200 символами
СХЕМА ШИМ РЕГУЛЯТОРА
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсно модулируемые) регуляторы. Схема универсальная — она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.
Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 — 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума — открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю — система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1. Меняя отношение сопротивлений заряда/разряда — меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел — подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
Форум по широтно-импульсным регуляторам
Форум по обсуждению материала СХЕМА ШИМ РЕГУЛЯТОРА
ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
Описание ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
ШИМ контроллер двигателя ZK-MG в корпусе. Регулирует скорость мотора, индицирует на цифровой дисплей мощность.
1. Основные характеристики продукта:
1,1 оснащен контактами старт-стоп, и может быть подключен к внешним переключателем управления, чтобы удовлетворить различные требования к контролю вращения.
1,2 функция мягкого пуска двигателя. При запуске двигателя ток медленно увеличивается, и нет тока удара, который может эффективно защитить двигатель и продлить срок его службы
1,3 Рабочий цикл, верхний и нижний предел рабочего цикла и рабочая частота могут быть установлены для облегчения работы клиентов и использования их двигателей в соответствии с их рабочими характеристиками.
1,3 ручка цифрового кодировщика регулирует скорость двигателя, которая является более точной и последовательной, чем обычный потенциометр.
1,4 со стандартным корпусом 5135, удобным для установки клиентом.
2. Технические параметры: Модель: ZK-MG
2,1 Рабочее напряжение: 5 в пост. Тока ~ 30 В, защита от обратного подключения
2,2 Номинальный ток: при 30в= 5A максимальный ток 15A при 5 в.
2,3 Максимальная мощность: 150 Вт
2,2 Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1%
2,3 Рабочий цикл: 0-100%, 1% шаг
2,4 размер изделия: 79 мм * 43 мм * 26 мм
2,5 Вес изделия: 41 г
2,6 упаковка: картонная упаковка
3. Инструкции по эксплуатации:
3,2 управление цифровой ручкой кодировщика
В интерфейсе по умолчанию: (рабочий цикл отображается по умолчанию)
Короткое нажатие-переключатель запуска и остановки двигателя
Длительное нажатие-для входа в интерфейс настройки
Вращение против часовой стрелки-коэффициент нагрузки уменьшается
Вращение по часовой стрелке-увеличенный рабочий цикл
Под настройкой экрана:
Короткое нажатие-Выберите параметры настройки и переключитесь между нижним пределом рабочего цикла, верхним пределом рабочего цикла и рабочей частотой. Форма отображения нижнего предела рабочего цикла-«L» + две цифры, форма отображения верхнего предела рабочего цикла-«H» + две цифры или «100», И форма отображения рабочей частоты-«F» + две цифры.
Длительное нажатие-выход из интерфейса настройки
Вращение против часовой стрелки-соответствующие настройки уменьшены
Вращение по часовой стрелке-параметры настройки увеличиваются соответственно
3,3 задний стоп-порт
Клавиша переключения или уровень 3,3 В могут быть внешне подключены. Переключайте состояние запуска/остановки двигателя при закрытии ключа или снижении уровня 3,3 В.
Комплект поставки: контроллер двигателя постоянного тока
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
ШИМ регулятор оборотов двигателя
Добрый вечер, друзья! Это первый мой в жизни обзор чего-либо, поэтому готов с радостью выслушать критику и советы.Товар покупался за свои кровные. Подробности ниже.
К заказу этого регулятора, меня натолкнул обзор уважаемого kirich. Поэтому, я сначала заказал точно такой же ШИМ регулятор, но потом для разнообразия закал и героя сегодняшнего обзора.
Заказ был сделан 29 октября, а ко мне в подмосковную Лобню он добрался только 3 декабря. Товар был упакован в стандартный пакетик с пупырками и обильно обмотан поролоном:
Упаковка
В комплекте только сама плата управления и переменный резистор на 100 кОм, который подключается непосредственно к плате разъемом HU-3 с длиной проводов 19 см, что вполне удобно для монтажа.
Другие ракурсы
Пропайка силовых дорожек мне показалась просто ужасной. Не думал, что наши азиатские друзья буду экономить на припое. Также видно множество следов неотмытого флюса. Возможно это я такой везунчик:
На гуру пайки я не претендую, поэтому решил исправить немного ситуацию. Думаю если бы кому-то пришла плата после моих рук, от китайцев не особо отличили:
Регулятор построен на таймере NE555P, поэтому я думаю не имеет смысла рассказывать про всю схему, да и боюсь пока не хватит для этого знаний =).
Рабочий диапазон напряжения 12-60 Вольт и максимальный ток 20 Ампер. Кстати на одном из фото виден плавкий предохранитель номиналом на 20 Ампер, что по идее должно спасать от превышения номинального тока.
А теперь проверим его в работе. В качестве питания буду использовать старый БП от ноутбука на 19 Вольт и 4.74 Ампера, а мотор от какого-то шуроповерта на 18 Вольт:
Видео самой работы. Прошу прощения за небольшую тряску, т.к. снимал на телефон, а штатива для этого дела не имею:
Покупать или нет — дело каждого. Я покупал его для мини сверлильного станка, который надеюсь начать собирать в наступающем году. Конечно, в сети полно схем на эту тематику, но мне пока как новичку захотелось готового решения.
Всем спасибо за внимание, жду Ваших замечаний!
Вместо котэ
Регулятор оборотов электродвигателя от 6 до 28 вольт 3 ампера
Выберите категорию:
Все Запчасти для газовых котлов » Запчасти универсальные для котлов (взаимозаменяемые) » Запчасти для напольных котлов » Запчасти Navien » Запчасти Daewoo (ДЕУ) » Запчасти Master Gas Seul » Запчасти Ferroli »» Ferroli Arena »» Ferroli Fortuna »» Ferroli Domina/Pro »» Ferroli Divatech »» Ferroli DOMIPROJECT »» Ferroli Divatop » Запчасти Beretta » Запчасти для Bosch, Junkers » Запчасти Arderia » Запчасти BAXI » Запчасти Аристон » Запчасти VIESSMANN » Запчасти VAILLANT » Запчасти Балтгаз (BaltGaz), Нева Люкс (NevaLux) » Immergas » Запчасти Chaffoteaux » Запчасти для газовых горелок Запчасти для электрических котлов и водонагревателей Запчасти для газовых колонок Запчасти на газовые и электрические плиты Отопительное оборудование » Котлы газовые »» Настенные газовые котлы »»» Котлы газовые настенные Navien »»»» Серия NAVIEN DELUXE »»»» Серия NAVIEN DELUXE PLUS »»»» Серия NAVIEN ATMO »»» Котлы газовые настенные NEVA (Нева) »»» Котлы газовые настенные Arderia »»» Котлы газовые настенные Ferroli »»» Котлы газовые настенные Daewoo »»» Котлы газовые настенные Vaillant »»» Котлы газовые настенные BAXI »»»» Настенные »»»» Настенные конденсационные »»» Котлы газовые настенные OASIS »»» Настенные газовые котлы Olical JLG (КНР) »»» Котлы газовые Vissmann »» Напольные газовые котлы »»» Котлы напольные одноконтурные »»» Котлы напольные двухконтурные »»» Аппараты АОГВ »» Парапетные котлы »» Дымоходы, комплектующие дымоход для газовых котлов » Газовые конвекторы » Котлы электрические » Котлы на отработке » Котлы напольные твердотопливные »» Котлы пиролизные »» Твердотопливные котлы »»» Твердотопливные стальные котлы »»» Твердотопливные чугунные котлы »»» Газогорелочные устройства — горелки »»» Пеллетные горелки »» Котлы пилетные » Обогреватели на жидком топливе » Расширительные баки для систем отопления » Печи отопительные твёрдотопливные » Группы безопасности Товар со скидкой (Распродажа) Бытовая сантехника » Аксессуары для ванных комнат и туалетов »» Аксессуары D-Lin »» Аксессуары FRAP » Мойки кухонные » Полотенцесушители » Смесители »» Запасные части для смесителей » Сифоны, комплектующие » Комплектующие для спускных бачков Водонагреватели Газовые шланги, гибкая подводка для воды, шланги для полива Дымоходы » Одностенные Дымоходы » Двухстенные дымоходы Запорно-регулирующая арматура » Газовые краны » Вентили, латунные, чугунные. Резьбовые, фланцевые. » Шаровые краны »» Шаровые краны «BUGATTI» »» Шаровые краны отопление и водопровод » Задвижки, Затворы (чугунные, стальные) » Уплотнительные кольца .Средства герметизации соединений, лен, герметики, » Запорная арматура FAR »» Регулирующие и Запорные Вентили »» Терморегулирующие вентили »» Универсальные узлы (для одно — и двухтрубных систем) Инструмент » Ключи разводные и газовые » Ключи рожковые, торцовые, трубчатые, наборы инструментов » Резьбонарезной инструмент » Ручной инструмент Инфракрасные обогреватели » ИК Пион серия Thermo Glass » Инфракрасные обогреватели газовые » Инфракрасные обогреватели других производителей Канализационные трубы и фитинги » Канализация Ostendorf » Канализация Санполимер »» Фитинги Санполимер »» Трубы Санполимер ф 110мм »» Трубы Санполимер ф 50мм » Прокладки, манжеты » Трапы для слива воды Коллекторы для систем отопления » Коллекторы — гидрострелки » Коллекторы FAR »» Гидравлический разделитель FAR »» Нерегулируемые коллекторы FAR »» Регулирующие и запорные коллекторы FAR »» Терморегулирующие и запорные коллекторы FAR »» Сборные узлы, коллекторы для теплых полов »» Комплектующие к коллекторам FAR » Коллекторы START Счетчики,измерительные приборы » Счетчики »» Счетчики воды »»» Бытовые »»» Промышленные »» Счетчики газовые »» Счетчики тепла » Манометры » Термометры » Термостат (измеритель преобразователь температуры) » Установочное оборудование для термометров и манометров Насосы, насосное оборудование » Насосы «Wilo» — Станции, циркуляционные, погруженные, поверхностные и др. »» Насосы многоступенчатые «Wilo» »» Насосы погружные «Wilo» »» Насосы самовсасывающие «Wilo» »» Насосы циркуляционные «Wilo» »» Установки «Wilo» » Насосы «PEDROLLO» »» Насосы вихревые «Pedrollo» »» Насосы погружные «Pedrollo» »»» Насосы колодезные »»» Насосы скважинные »»» Насосы погружные дренажные »»» Насосы погружные многоступенчатые »»» Насосы погружные фекальные »»» Насосные станции Pedrollo »» Насосы садовые «PEDROLLO» »» Насосы самовсасывающие «Pedrollo» »» Насосы центробежные «Pedrollo» » Насосы поверхностные вихревого типа » Насосы поверхностные центробежного типа » Насосы погружные » Насосы циркуляционные »» Циркуляционные насосы UNIPUMP »» Циркуляционные насосы GRUNDFOS »» Циркуляционные насосы SPERONI » Насосы вертикальные моноблочные » Насосы самовсасывающие » Насосы дренажные » Насосы фекальные » Насосные станции » Насосные станции канализационные » Гидроаккумуляторы » Комплектующие к насосам Обогреватели » Электрические обогреватели »» Масляные обогреватели »» Электрические обогреватели марки ПЭТ »» Обогреватели галогеновые »» Взрывозащищенные обогреватели »» Конвекторы электрические »» Тепловентиляторы »» Тепловые завесы » Тепловые пушки / Калориферы »» Тепловые пушки электрические »» Тепловые и потолочные конвекторы »» Калориферы газовые »» Калориферы дизельные » Жидкотопливные обогреватели Радиаторы отопления » Радиаторы алюминиевые » Радиаторы биметаллические » Радиаторы стальные панельные » Радиаторы чугунные » Радиаторы (конвекторы) Jaga » Комплектующие для алюминиевых и биметаллических радиаторов » Комплектующие для чугунных радиаторов Электрические, электронные модули, выключатели Системы очистки воды » Бытовые фильтры очистки воды для квартир » Фильтры очистки воды для коттеджей » Комплектующие и расходные материалы Соль Теплоносители (антифризы) для систем отопления Терморегуляторы » Механические терморегуляторы » Электронные терморегуляторы (програмируемые) » Терморегуляторы GSM (управление с мобильного) » Терморегуляторы трёхходовые для систем отопления и ГВС Трубопроводы и фитинги » Полипропиленовые системы » Металлопластиковые системы » Стальные системы » ПНД системы » Медные трубопроводы и фитинги » Теплоизоляция для труб Шланги поливочные Мы в ВК
Производитель:
Все»WIKA Alexander Wiegand GmbH & Co.», Германия.AEG (Китай)Altoen DaewooAXIS, РоссияBAXIBeretta, ИталияBONOMINI, ИталияBugatti, ИталияD-LIN (Китай)FerroliFIV, ИталияFRAP (Китай)GrundfosGrundfos, ДанияHaierHONEYWELLHONEYWELLHoneywell, Csech RepublicIMITItaltehnica ИталияJet-line Varmega, ИталияMeerPlastMORA (Чехия)OpenTherm (starclima) италияOstendorf, ГерманияRBM, ИталияRiello, ИталияSIT GRUP EUThermoWatt, ИталияTIM, КитайUnipump РоссияVaillantWatss ГерманияWilo ГерманияZilmetАнипласт, РоссияБалтГазВенгрияГерманияГреция HalcorЗАВОД ТЕПЛОВОГО ОБОРУДОВАНИЯ «ПЕЛЛЕТРОН» Дамир тел. 8-912-292-23-59 +WhatsAppИталияКитайКореяЛуч (Таганрог)Мимакс Таганрог (8634) 38-16-13, 38-02-80 [email protected], Ип СупруновНева (Балтгаз)НидерландыОООПолитэк, РоссияПольшаРБМ, ТулаРоссияРоссия, г. ЭнгельсРоссия, г.ТаганрогРоссия, Московская областьРоссия, Челябинск.РязаньРязань ООО»РОСТ»Санкт-Петербург, РоссияСАНПОЛИМЕР РоссияСанполимер, РоссияТурцияТурцияУклад, ПсковФинляндияФранцияЧистополь, РоссияШвеция SWEPЭван (Россия)Япония
50A Регулятор скорости двигателя (PWM)
от CanaKit
- Напряжение питания / нагрузки: от 9 до 24 В постоянного тока (рекомендуется 12 В постоянного тока)
- Дополнительный ЖК-модуль
- Функция плавного пуска
- Максимальный длительный ток: 50 А при 100 Гц
- Частота:
- Фиксированная (100 Гц)
- Регулируемая ( 244 Гц до 3.125 кГц)
- Диапазон рабочего цикла ШИМ: 0% — 100%
- Высокоэффективная конструкция с использованием высокомощного полевого МОП-транзистора для охлаждения
- Включает большие двойные лопаточные клеммы для простоты подключения проводов
- Включает радиатор
- Включает вентилятор 12 В постоянного тока , В комплекте ручки
описание продукта
Управляйте скоростью двигателя постоянного тока без ущерба для крутящего момента.Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток до 50 А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности для работы в режиме охлаждения. Также доступен дополнительный ЖК-модуль (деталь CanaKit # LCD1133), который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления ШИМ-сигналом. Контроллер имеет два режима работы: фиксированная или переменная частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, тем самым увеличивая время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. Вентилятор 12 В постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т. Д. Размеры: 4,03 «x 2,82»
SainSmart DC 12V-40V 400W 10A Регулируемый регулятор скорости двигателя постоянного тока PWM — SainSmart.com
Торговая марка: SainSmartSainSmart DC 12V-40V 400W 10A Регулируемый регулятор скорости двигателя постоянного тока ШИМ-контроллер
Артикул: 101-92-135 UPC: 6955170883851 ID товара: 11091782676 ID варианта: 45102074708
7 долларов.99
Что такое ШИМ-управление двигателем — 4QD
Что такое широтно-импульсная модуляция? как работает ШИМ-управление двигателем и как выглядит схема ШИМ? На этой странице мы подробно рассмотрим теорию и практику ШИМ-управления двигателем.
Принципы
Для управления скоростью постоянного тока. двигателю нам понадобится переменное напряжение постоянного тока. источник питания. Однако, если вы возьмете двигатель 12 В и включите питание, двигатель начнет ускоряться: двигатели не реагируют немедленно, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание до того, как двигатель достигнет полной скорости, он начнет замедляться. Если мы включим и выключим питание достаточно быстро, двигатель будет работать с некоторой скоростью между нулевой и полной скоростью.Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
Рассмотрим сигнал выше. Если двигатель соединен одним концом с плюсом батареи, а другим концом с минусом батареи через переключатель (полевой МОП-транзистор, силовой транзистор или аналогичный), тогда, если полевой МОП-транзистор включен на короткий период и выключен на длительное время, как в выше, двигатель будет вращаться только медленно.В точке B переключатель находится в положении 50%, а выключение — 50%. В точке C двигатель работает большую часть времени и выключен только на короткое время, поэтому скорость близка к максимальной. В практическом контроллере низкого напряжения переключатель открывается и закрывается с частотой 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышным. Он также достаточно медленный, чтобы полевые МОП-транзисторы могли легко переключаться на этой частоте.Однако у двигателя есть индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток течет через переключающий MOSFET, когда он включен — но куда он будет течь, когда MOSFET выключится? Читайте и узнайте!Схема управления двигателем с ШИМ
Схема управления двигателем с ШИМРассмотрим схему выше: на ней показаны полевой МОП-транзистор привода и двигатель. Когда ведущий полевой МОП-транзистор проводит ток, ток течет от положительного полюса батареи, через двигатель и полевой МОП-транзистор (стрелка A) и обратно к отрицательному полюсу батареи.Когда полевой МОП-транзистор отключается, ток двигателя продолжает течь из-за его индуктивности. К двигателю подключен второй полевой МОП-транзистор: МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (закоротить его затвор до источника) или использовать силовой диод. Однако не так широко понятный факт о полевых МОП-транзисторах заключается в том, что, когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор является резистивным по отношению к току в любом направлении, а на МОП-транзисторе с проводящей мощностью на самом деле падает меньше напряжения, чем на прямом смещенном диоде, поэтому МОП-транзистор требует меньше теплоотвода и расходует меньше энергии батареи.
Из приведенного выше вы должны увидеть, что если приводной MOSFET включен в течение 50% рабочего цикла, напряжение двигателя составляет 50% напряжения батареи, и, поскольку ток батареи течет только при включенном MOSFET, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет только 50% тока двигателя!
Главный конденсатор
Однако существует проблема: когда полевой МОП-транзистор выключается, он не только прерывает ток двигателя, но также прерывает ток, текущий от батареи.Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этот всплеск. Когда приводной полевой МОП-транзистор снова включается, аккумуляторный ток должен течь быстро, чего он не может. Главный конденсатор подает ток во время восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! На ранних этапах разработки мы когда-то использовали стандартные конденсаторы с проволочным концом и расплавляли провода конденсатора! Конденсаторы имеют провода с медным покрытием , сталь , и в системах управления двигателями эти провода могут сильно нагреваться!
Из вышесказанного очевидно, что работа этого конденсатора в значительной степени зависит от индуктивности контура проводов батареи.Длинные провода будут иметь высокую индуктивность. Скручивание проводов аккумулятора снижает их индуктивность.
Сопротивление выводов батареи будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят вставить амперметр в провода аккумулятора. Следует противостоять искушению: в частности, простые автомобильные амперметры обладают высокой индуктивностью.
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно не имеют дорогостоящего главного конденсатора и зависят от емкости батареи.Вам это сойдет с рук — наши ранние Eagle и Egret — такие контроллеры. Однако краткое объяснение эффектов необходимо. Чтобы проиллюстрировать это, приведен график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Заземление осциллографа находится на отрицательной шине.
Вверху — положительный полюс аккумулятора, вид сверху, внизу — отрицательный полюс двигателя (который переключается контроллером).Осциллограммы были сильно очищены, чтобы проиллюстрировать: на практике на осциллограмме много «грязного» звона. Показано напряжение питания 12 В.
Мы соединяем кривую в точке, где нет тока батареи: выход двигателя высокий, и ток повторно циркулирует в маховике. В точке A включается полевой МОП-транзистор привода контроллера, отвлекая ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому провода батареи упадут до 12 В, и напряжение контроллера гаснет до тех пор, пока индуктивность свинца не сможет зарядиться, что происходит в пункте B.Время A-B зависит от тока и индуктивности контура батареи и может составлять значительную часть времени цикла!
Затем, в точке C, нижний полевой МОП-транзистор резко выключается, прерывая ток. Ток двигателя — это не проблема, он продолжает течь, и устройство маховика должно быть здесь, чтобы убедиться, что это так! Но вы не можете внезапно остановить ток батареи — поэтому он выступает в виде большого скачка напряжения. Этот всплеск нарастает до тех пор, пока что-то не сработает: в этом случае он достигает напряжения лавинного пробоя полевого МОП-транзистора, и полевой МОП-транзистор фиксирует его.Вы можете легко увидеть напряжение зажима с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1 / 2Li², хранящаяся в индуктивности контура батареи, намного ниже безопасной повторяемой энергии лавины.
Это проблема: вычислить индуктивность контура батареи практически невозможно — даже для инженера. Игроку это сделать — ну, сложно. Таким образом, производитель просто поставляет контроллеры известной группе клиентов, которые используют их стандартными способами, и решает проблемы по мере их возникновения на эмпирической основе.Это всегда вопрос нетехнического покупателя, пытающегося получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большая часть (но не все) нарушения питания сглаживаются конденсатором. Тем не менее, вы увидите положительный выброс и звон при прерывании тока батареи.
ШИМ и нагрев двигателя
Популярная «сказка старой жены» заключается в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый d.c. Как и большинство старых женских сказок, это исходит из частичной правды, взращенной непониманием. «Миф» возникает из-за того, что, если частота слишком низкая, ток будет прерывистым (или, по крайней мере, переменным в зависимости от формы волны ШИМ), потому что индуктивность двигателя не может поддерживать ток должным образом в период отключения формы волны. Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «коэффициент формы» тока будет больше единицы.Чем ниже частота, тем выше ток пульсации и сильнее нагрев.
Рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток протекает, скажем, в течение 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, обеспечиваемому непрерывным током в 1 ампер, то вам явно понадобится средний ток 1 ампер. Для этого при рабочем цикле 33% у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь ток в 3 ампера даст в 9 раз (я в квадрате) нагревательный эффект, равный 1 амперам непрерывного действия.
Но если 3 ампера протекают только 1/3 от общего времени — значит, нагрев двигателя в 9 раз за 1/3 времени — или в 3 раза больше, чем устойчивый 1 ампер! Считается, что этот сигнал имеет «форм-фактор» 3.
Однако — если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным. Например, двигатель Lynch имеет индуктивность всего 39 микрогенри (это один из известных мне двигателей с самой низкой индуктивностью) и сопротивление 0.016 Ом. «Постоянная времени» для цепи L-R равна L / R, что (для двигателя Lynch) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 микрогенри, а сопротивление 40 миллиом, что дает постоянную времени 5 мсек.
Как показывает практика, и чтобы избежать излишней математики, период повторения импульсов должен быть значительно короче постоянной времени двигателя.
Другими факторами, влияющими на PRF, являются:
Если он находится в звуковом диапазоне, двигатель может издавать вой (вызванный явлением, известным как «магнитострикция», поэтому держитесь выше звукового диапазона.
Схема MOSFET рассеивает больше всего при переключении из одного состояния в другое, поэтому частота не должна быть слишком высокой — MOSFET можно использовать с осторожностью до 100 кГц, но это становится немного выше.
Радиочастотное излучение: они увеличиваются с увеличением частоты, поэтому сохраняйте частоту как можно ниже!
Очевидно, что трудно выбрать «лучший» компромисс между ними, но оптимальная частота, по-видимому, составляет около 20 кГц.
На нашем дочернем сайте 4qdtec есть более подробная версия этой страницы вместе с большим количеством технических подробностей.com
Рекламная пауза…. приходите и ознакомьтесь с полным ассортиментом наших контроллеров!
4QD-TEC: ШИМ регулирование скорости
Содержание этой страницы
Введение
4QD производит ШИМ-регуляторы скорости для электродвигателей, поэтому вряд ли вы ожидаете, что мы дадим вам все наши собственные уникальные схемы и технические ноу-хау, но многое является общественным достоянием, и есть также способы сделать ШИМ, которые мы пробовали и отклонено (по любой причине).Эта страница должна дать вам хорошее представление о задействованных принципах и о том, что делать, а также о том, чего не следует делать!
Эта страница фактически первая в длинной серии по управлению двигателями, но остальные страницы доступны только членам 4QD-TEC.
Коммерческий контроллер двигателя — это больше, чем просто схема для изменения скорости двигателя, и у нас есть «экскурсия» по функциям контроллера, которая просто объясняет большинство функций, встроенных в современные контроллеры, и почему они необходимы.
Принципы
Для управления скоростью постоянного тока. двигателю нам понадобится переменное напряжение постоянного тока. источник питания. Однако, если вы возьмете двигатель 12 В и включите питание, двигатель начнет ускоряться: двигатели не реагируют немедленно, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание до того, как двигатель достигнет полной скорости, он начнет замедляться. Если мы включим и выключим питание достаточно быстро, двигатель будет работать с некоторой скоростью между нулевой и полной скоростью.Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
Рассмотрим сигнал выше. Если двигатель соединен одним концом с плюсом батареи, а другим концом с минусом батареи через переключатель (полевой МОП-транзистор, силовой транзистор или аналогичный), тогда, если полевой МОП-транзистор включен на короткий период и выключен на длительное время, как в выше, двигатель будет вращаться только медленно.В точке B переключатель находится в положении 50%, а выключение — 50%. В точке C двигатель работает большую часть времени и выключен только на короткое время, поэтому скорость близка к максимальной. В практическом контроллере низкого напряжения переключатель открывается и закрывается с частотой 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышным. Он также достаточно медленный, чтобы полевые МОП-транзисторы могли легко переключаться на этой частоте.Однако у двигателя есть индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток течет через переключающий MOSFET, когда он включен — но куда он будет течь, когда MOSFET выключится? Читайте и узнайте!
Рассмотрим схему выше: на ней показаны полевой МОП-транзистор привода и двигатель. Когда ведущий полевой МОП-транзистор проводит ток, ток течет от положительного полюса батареи, через двигатель и полевой МОП-транзистор (стрелка A) и обратно к отрицательному полюсу батареи. Когда полевой МОП-транзистор выключается, ток двигателя продолжает течь из-за его индуктивности.К двигателю подключен второй полевой МОП-транзистор: МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (закоротить его затвор до источника) или использовать силовой диод. Однако не так широко понятный факт о полевых МОП-транзисторах заключается в том, что, когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор является резистивным по отношению к току в любом направлении, а на МОП-транзисторе с проводящей мощностью на самом деле падает меньше напряжения, чем на прямом смещенном диоде, поэтому МОП-транзистор требует меньше теплоотвода и расходует меньше энергии батареи.
Из приведенного выше вы должны увидеть, что если приводной MOSFET включен в течение 50% рабочего цикла, напряжение двигателя составляет 50% напряжения батареи, и, поскольку ток батареи течет только при включенном MOSFET, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет только 50% тока двигателя!
Главный конденсатор
Однако существует проблема: когда полевой МОП-транзистор выключается, он не только прерывает ток двигателя, но также прерывает ток, текущий от батареи.Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этот всплеск. Когда приводной полевой МОП-транзистор снова включается, аккумуляторный ток должен течь быстро, чего он не может. Главный конденсатор подает ток во время восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! На ранних этапах разработки мы когда-то использовали стандартные конденсаторы с проволочным концом и расплавляли провода конденсатора! Конденсаторы имеют провода с медным покрытием , сталь , и в системах управления двигателями эти провода могут сильно нагреваться!
Из вышесказанного очевидно, что работа этого конденсатора в значительной степени зависит от индуктивности контура проводов батареи.Длинные провода будут иметь высокую индуктивность. Скручивание проводов аккумулятора снижает их индуктивность.
Само собой разумеется, что сопротивление в выводах батареи будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят вставить амперметр в провода аккумулятора. Следует устоять перед соблазном: в частности, простые автомобильные амперметры обладают высокой индуктивностью!
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно не имеют дорогостоящего главного конденсатора и зависят от емкости батареи.Вам это сойдет с рук — и Eagle и Egret — такие контроллеры. Однако краткое объяснение эффектов необходимо. Чтобы проиллюстрировать это, приведен график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Заземление осциллографа находится на отрицательной шине.
Вверху показан положительный полюс аккумуляторной батареи, вид сверху, внизу — отрицательный полюс двигателя (который переключается контроллером).Осциллограммы были сильно очищены, чтобы проиллюстрировать: на практике на осциллограмме много «грязного» звона. Показано напряжение питания 12 В.
Мы соединяем кривую в точке, где нет тока батареи: выход двигателя высокий, и ток повторно циркулирует в маховике. В точке A включается полевой МОП-транзистор привода контроллера, отвлекая ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому провода батареи упадут до 12 В, и напряжение контроллера гаснет до тех пор, пока индуктивность свинца не сможет зарядиться, что происходит в пункте B.Время A-B зависит от тока и индуктивности контура батареи и может составлять значительную часть времени цикла!
Затем, в точке C, нижний полевой МОП-транзистор резко выключается, прерывая ток. Ток двигателя — это не проблема, он продолжает течь, и устройство маховика должно быть здесь, чтобы убедиться, что это так! Но вы не можете внезапно остановить ток батареи — поэтому он выступает в виде большого скачка напряжения. Этот всплеск нарастает до тех пор, пока что-то не сработает: в этом случае он достигает напряжения лавинного пробоя полевого МОП-транзистора, и полевой МОП-транзистор фиксирует его.Вы можете легко увидеть напряжение зажима с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1 / 2Li², хранящаяся в индуктивности контура батареи, намного ниже безопасной повторяемой энергии лавины.
Это проблема: вычислить индуктивность контура батареи практически невозможно — даже для инженера. Игроку это сделать — ну, сложно. Таким образом, производитель просто поставляет контроллеры известной группе клиентов, которые используют их стандартными способами, и решает проблемы по мере их возникновения на эмпирической основе.Это всегда вопрос нетехнического покупателя, пытающегося получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большая часть (но не все) нарушения питания сглаживаются конденсатором. Тем не менее, вы увидите положительный выброс и звон при прерывании тока батареи.
Рекуперативное торможение
Вы можете захотеть вернуться к этому биту после того, как изучите две схемы ниже.«Очень простой контроллер» не включает рекуперативного торможения, в отличие от «более сложного контроллера». Это описание необходимо читать вместе со второй схемой, но оно также относится к диаграмме выше, поэтому вставлено в этот момент, чтобы избежать повторной загрузки диаграммы.
Один из тщательно охраняемых секретов управления двигателем — это рекуперативное торможение. Тем не менее, это на самом деле не секрет: схемы, обеспечивающие рекуперативное торможение, не редкость, но, похоже, мало кто понимает, что происходит.Итак, начнем.
В первой схеме (выше) показана выходная пара полевых МОП-транзисторов с приводом двигателя. Также было указано, что для двигателя выходной сигнал контроллера является чистым постоянным током. напряжение (поскольку индуктивность двигателя поддерживает постоянный ток в течение цикла переключения). Теперь двигатель будет генерировать обратную ЭДС. который пропорционален его скорости вращения. При нулевой нагрузке эта задняя э.д.с. поднимется до уровня выходного сигнала контроллера.
Мы уже видели, что полевой МОП-транзистор представляет собой двунаправленный переключатель, который резистивно проводит (когда он включен) для обоих направлений тока. Итак, рассмотрим ситуацию, когда ток равен нулю, а мощность контроллера теперь уменьшена. Мотор задний э.д.с. теперь выше, чем выходное напряжение контроллера, поэтому двигатель будет пытаться подавать ток обратно в контроллер. Если это удастся, мотор затормозится — у нас будет рекуперативное торможение.
Этот тип схемы (где верхняя сторона включена, когда нижняя сторона выключена) может обеспечивать ток или понижать его .Это работает следующим образом: обратный ток двигателя теперь является прямым током к полевому МОП-транзистору маховика, поэтому, когда он включен, он замыкает двигатель, тормозной ток которого возрастает в течение этого периода (стрелка B, перевернутая). Теперь полевой МОП-транзистор с маховиком отключается, но этот ток должен продолжать течь — из-за индуктивности двигателя. Таким образом, он течет как обратный ток через приводной полевой МОП-транзистор, при этом заряжая батарею. Дополнительное напряжение для этого получается из энергии, запасенной в индуктивности двигателя.Процесс переключения с привода на торможение полностью автоматический. Более того, это полностью достигается за счет того, что скорость двигателя превышает напряжение привода, и без каких-либо изменений состояния или переключений в контроллере. Регенеративное торможение — это, если хотите, побочный продукт конструкции контроллера и почти полная авария.
Очень простой контроллер
Схема ниже описывает простейший контроллер мотора. Для пользы всех, кто хоть что-нибудь знает о контроллерах моторов — компания 4QD не разрабатывала эту схему, и мы полностью от нее отказываемся, так что смело смейтесь или плачьте, не веря своим глазам.Если вы решили сделать это — да, работает, но раз уж мы это не проектировали и не нравится — извините, но вы сами по себе!
Тем не менее, это схема, которую мы собирали за один раз для заказчика, а сделали несколько тысяч! Многие из них все еще разъезжают по полям для гольфа в Великобритании — так что это работает! Он также показывает, чего не следует делать!
Первые три секции 4049 скомпонованы с общей обратной связью через резистор 220 кОм и конденсатор 22n на входе, чтобы дать фазовый сдвиг в качестве генератора.Выходной сигнал представляет собой прямоугольный сигнал, который буферизируется другими тремя каскадами 4049 для управления затворами MOSFET. При изменении потенциометра на входе среднее напряжение на 22n изменяется, и это изменяет отношение метки к пространству (рабочий цикл) генератора. Когда потенциометр установлен на минимум, генератор останавливается с низким уровнем на выходе (т. Е. Полевые МОП-транзисторы не имеют управления затвором и полностью выключены), а когда потенциометр установлен на максимум, генератор останавливается с высоким уровнем на выходе — полевые МОП-транзисторы включены все время.Есть несколько проблем: во-первых, такое «вытягивание» осциллятора меняет его частоту. Это не слишком сильно влияет на работу, за исключением того, что если частота становится слишком высокой, полевые МОП-транзисторы включаются и выключаются слишком быстро и становятся слишком горячими. Если она слишком низкая, становится слышна частота генератора и двигатели воют. Другая проблема заключается в том, что практически невозможно заставить осциллятор так, чтобы оно варьировалось от очень высокого до очень низкого отношения метки к пространству! 82K и 2n2 помогают в этом отношении, вводя отрицательную обратную связь для уменьшения усиления в контуре положительной обратной связи, так что генератор только колеблется: это добавление 4QD, внесенное в схему, и до того, как это было сделано, у контроллера был неприятный скачок от От 80% до 100% полной скорости.Обратите внимание, что IC — это 4049UB (без буферизации), буферизованная версия работать не будет. Кроме того, некоторые модели 4049UB не работают должным образом (кто-нибудь использовал излишки Toshiba 4049UB?), Потому что они слишком хороши!
Другая неприятная вещь заключается в том, что горшок изменяет осциллятор только примерно в 1/3 своего полезного диапазона: в данном случае это было нормально, потому что горшок использовался в поворотной рукоятке с ходом только на 90 градусов! Но необходимо было отрегулировать ручку, чтобы диапазон был правильным.
Вот вам и генератор / модулятор.Но поднимите руку всем, кто заметил отсутствие главного конденсатора, о котором я упоминал выше. Это дорогие компоненты: кейди для гольфа, как правило, не используют их по этой причине. Что происходит, так это то, что когда полевые МОП-транзисторы выключают индуктивность контура батареи, возникает большой скачок напряжения на полевом МОП-транзисторе привода (который выключен — помните, что ток двигателя теперь (в основном) протекает через диод). Но между плюсом батареи и затвором MOSFET есть стабилитрон на 36 В. На нем присутствует скачок напряжения, поэтому он проводит, и старый бедный МОП-транзистор снова включается.Фактически стабилитрон ограничивает частоту выключения полевого МОП-транзистора до уровня, необходимого для поддержания импульса 40 В. МОП-транзисторы — очень прочные устройства, и они выдержат такое злоупотребление (но есть более элегантные способы сделать это). Когда MOSFET снова включается, батарея пытается протолкнуть ток через индуктивность контура батареи, но не может, поэтому напряжение на контроллере падает. Но на затворе MOSFET присутствует напряжение, и если бы не было диода, включенного последовательно с стабилитроном, стабилитрон был бы смещен в прямом направлении, закорачивая затвор на положительную шину (теперь при нулевом напряжении из-за обрыва питания).
Обратите внимание на диод питания как на обратный ход. Если вы посмотрите спецификации на STP60N06 и 25JPF40, вы увидите, что это некоторый перебор (грубая сила и много невежества), но эта комбинация была достигнута заказчиком, просто использовав более толстое устройство, пока он не перестал отказываться. ! Никакой утонченности! Чтобы усугубить травму, контроллер практически не имел радиатора и был помещен в пластиковый корпус. С точки зрения разработчика электроники, в схеме было очень мало правильного — кроме того, что она работала, и заказчик был ей вполне доволен! Я должен признать, что это на самом деле два важнейших критерия!
Также нет ничего, что могло бы ограничить ток, протекающий через полевые МОП-транзисторы, за исключением того, что полевые МОП-транзисторы представляют собой устройства 2 x 60 ампер, а ток заторможенного двигателя составлял около 60 ампер.
Чуть более сложный контроллер
Вторая цепь как бы связана с первой. Когда я увидел первую схему, она мне не понравилась, и я быстро собрал вторую схему, чтобы показать заказчику, что можно сделать. На самом деле он работает неплохо, но мы сделали всего несколько прототипов. Выпуск 2 стал первой производственной версией нашей серии 2QD. Вы можете смело предположить, что нынешние контроллеры значительно продвинулись дальше этого раннего контроллера! Тем не менее, это простая схема, которая хорошо справляется со своей задачей (в пределах своих ограничений).Это хорошо иллюстрирует принципы.
В схеме используется 3524, «регулирующий широтно-импульсный модулятор», поэтому краткое описание ИС, кажется, уместно. Чип предназначен для источников питания и имеет два чередующихся выхода (контакты 11 и 14), каждый из которых может работать от 0% до 45% времени цикла. Но эти выходы можно соединить вместе, как мы это сделали здесь. Подключенный таким образом выход представляет собой обычный выход ШИМ (как описано в верхней части этой страницы) с фиксированной частотой и переменной времени включения от 0% до 90%.Что, кстати, является одним из основных недостатков чипа — 90% своевременности означает, что вы можете получить только 90% полной скорости, а не 100%. Это основная причина, по которой 4QD перестал его использовать.
Осциллятор
Частота генератора контролируется резистором и конденсатором, подключенными к контактам 6 и 7. Выход генератора, помимо внутреннего подключения, доступен на контакте 3. Выход генератора используется для управления удвоителем напряжения для верхней стороны. Поставка ворот MOSFET. Подробнее об этом позже.
Регулятор
Также имеется встроенный стабилизатор: питание подается на контакт 15 (контакт 8 — 0 В), контакт 16 — это выход регулируемого опорного напряжения 5 В. Он используется для управления потенциометром скорости (3-контактный разъем). Он также используется для отключения при понижении напряжения на контакте 10. Подробнее об этом позже!
Компаратор
Рампа генератора внутренне связана с компаратором, который сравнивает его с сигналом управления скоростью. Выходом этого компаратора является ШИМ-сигнал.
Вход требуемой скорости от ползунка потенциометра подается на контакт 2. Это вход обычного операционного усилителя, выход с контакта 9 и отрицательная обратная связь поступает через предустановку на вывод 1: затем предустановка регулирует усиление. . Однако этот операционный усилитель является нетрадиционным в том смысле, что его выход также подключен ко второму операционному усилителю таким образом, что второй может перекрыть первый и снизить его выход. Второй используется для ограничения тока. Его положительный вход находится на контакте 4, а его инвертирующий вход — это контакт 5 (который подключен к 0 В).
Выходной сигнал ШИМ от 3524 подается на пару эмиттерных повторителей, чтобы обеспечить соответствующее управление затвором. Резисторы затвора 47R замедляют время нарастания (включения), а диоды обеспечивают быстрое отключение. 150pf также замедляет время нарастания. Однако эти же 150 пФ также ускоряют выключение верхнего привода (маховика). Hiside следует включать только тогда, когда полевой МОП-транзистор (управляющий) выключен, и, в идеале, должен быть небольшой «нижний слой» — период во время переключения (как при включении, так и при выключении), когда ни один из полевых МОП-транзисторов не имеет напряжения затвора.Если оба работают одновременно, возникает большой ток, который вызывает нагрев и, в крайнем случае, может быть разрушительным.
МОП-транзисторы
Поскольку в нем используются полевые МОП-транзисторы для измерения собственного тока, он может работать с широким спектром полевых МОП-транзисторов. Однако — он предназначен для стандартных полевых МОП-транзисторов. В частности, высокий уровень вряд ли будет правильно работать с полевыми МОП-транзисторами логического уровня, если вы не измените значения несколько.
Имейте в виду, что затворы MOSFET управляются от линии батареи.Это старая схема, и когда она была спроектирована, у полевых МОП-транзисторов напряжение пробоя затвора составляло около 30 В. С современными полевыми МОП-транзисторами это напряжение становится ниже, и если вы используете полевой МОП-транзистор с максимальным напряжением затвора 20 В — работа привода от батареи 24 В может привести к дыму!
Привод ворот верхний
Верхний полевой МОП-транзистор требует, чтобы его затвор был поднят над положительной шиной питания, поскольку, когда он проводит, и его затвор и исток, по сути, закорочены друг с другом и с шиной питания.Для этого его затвор должен быть как минимум на 7 вольт выше источника и, следовательно, выше источника питания.
Для этого выходной сигнал генератора 3524 используется для управления схемой накачки. Три транзистора слева усиливают генератор до прямоугольной волны, которая подается на конденсатор накачки 100n и два диода в конфигурации удвоителя напряжения. Выход удвоителя подается на стабилитрон 12в. Теперь, когда включен МОП-транзистор с обратной стороны, нижняя часть стабилитрона подключена к отрицательной шине питания, так что будет путь постоянного тока от +24 через оба диода и стабилитрон.Резистор 470R, включенный последовательно с диодами накачки, ограничивает ток через этот путь.
Это поднимает еще один вопрос о насосах высокого давления. Наряду с удвоителем напряжения существует также схема «самозагрузки». Не обращайте внимания на цепь насоса. Когда полевой МОП-транзистор с обратной стороны проводит ток, через стабилитрон (как мы видели) будет протекать ток, поэтому конденсатор на стабилитроне будет заряжаться. Когда включается верхняя сторона, этот конденсатор будет сохранять этот заряд, который будет обеспечивать управление затвором верхней стороны.Поэтому нам действительно не нужна схема насоса. Подача энергии на этом конденсаторе прекратится, когда выход перестанет переключаться с отключенной стороной низкого напряжения. Это происходит при очень низких скоростях двигателя, когда (или после) двигатель останавливается, поэтому отсутствие привода не является проблемой. Единственная причина, по которой 2QD имеет гистидиновый насос, заключается в том, что можно использовать два из них, подключенные друг к другу, в мостовой конфигурации. В этой конкретной конфигурации шестигранный привод не должен разрушаться, когда выход перестает переключаться.
Снижение пониженного напряжения.
Если вы слишком сильно разряжаете свинцово-кислотную батарею, вы навсегда сокращаете ее срок службы. Итак, эта схема измеряет питание и сравнивает его с эталонным источником питания 5 В. Если напряжение батареи падает слишком низко, транзистор блокирует схему ШИМ, подавая сигнал на контакт 10.
Эта функция на самом деле не так необходима, как некоторые думают: с каждой такой «функцией», как эта, есть компромиссы. См. Наше руководство по функциям контроллера для получения дополнительной информации.
Ограничение тока
Я рассмотрел измерение тока зеркала MOSFET в другом месте.Вот приложение. Вход считывания 3524 разработан для этого типа измерения тока: он имеет встроенное смещение 200 мВ, поэтому, когда сигнал на выводе 4 превышает 200 мВ, 3524 сокращает время включения, уменьшая скорость двигателя. 330R и 100R определяют ¼ напряжения полевого МОП-транзистора, поэтому с этими значениями предел будет около 800 мВ на полевом МОП-транзисторе. Отрегулируйте 100R для разных полевых МОП-транзисторов. Это определение тока довольно хорошо работает с 3524, но сама микросхема обеспечивает регулируемое ограничение тока в зависимости от длительности импульса включения, поэтому измеряемый ток в некоторой степени зависит от характеристик двигателя.
Недостатки
Хотя эта схема работает и является практичным контроллером, есть несколько недостатков. Мы не будем вдаваться в подробности здесь, но почти все они объяснены и предоставлены средства правовой защиты членам The Electronics Club , но если вы хотите узнать, как это сделать, вам нужно будет подписаться на 4QD-TEC, см. Нижнюю часть этой страницы.
- Как указывалось ранее, цепь 3524 не выдает более 90% полной скорости.
- Цепь ограничена по току в режиме движения, но если вы заведете автомобиль на вершине холма и начнете тормозить на спуске, нет ничего, что могло бы ограничить регенерированный ток.Вполне возможно добавить ограничение на торможение с регенерацией, и у 4QD есть уникально простой и эффективный способ сделать это — подобного, которого я не видел больше нигде. Вам нужно будет присоединиться к 4QD-TEC, чтобы получить подробную информацию!
- Регенеративное перенапряжение. Если аккумулятор отключается при торможении, регенерированная энергия не может быть возвращена в нее: вместо этого регенерированная энергия накачивает напряжение на контроллере до тех пор, пока полевые МОП-транзисторы не выйдут из строя: если они не могут поглотить регенерируемую энергию, тогда у вас будет дорогой дым генератор.Вылечить легко.
- Одна вещь, которая разрушает контроллеры MOSFET, — это реверсирование батареи: теперь два MOSFET представляют собой два диода с прямым смещением, подключенных к батарее. См. Наш список часто задаваемых вопросов для лечения.
- Еще одна вещь, которая разрушает все известные контроллеры MOSFET, — это буксировка транспортного средства, в котором они установлены. Если обратная ЭДС двигателя превышает напряжение батареи, ведущий MOSFET становится диодом с прямым смещением, подающим генерируемую мощность двигателя прямо на аккумулятор. Невозможно ограничить этот ток, поэтому полевой МОП-транзистор вспыхивает и создает клубы дыма.К счастью, такой режим отказа встречается довольно редко, но простой защиты от него действительно нет.
ШИМ и двигатель Обогрев
Популярная «сказка старой жены» заключается в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый постоянный ток. Как и большинство старых женских сказок, это исходит из частичной правды, взращенной непониманием. «Миф» возникает из-за того, что, если частота слишком низкая, ток будет прерывистым (или, по крайней мере, переменным в зависимости от формы сигнала ШИМ), потому что индуктивность двигателя не может поддерживать ток должным образом в период отключения сигнала.Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «форм-фактор» тока будет больше единицы. Чем ниже частота, тем выше ток пульсации и сильнее нагрев.
Рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток протекает, скажем, в течение 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, обеспечиваемому непрерывным током в 1 ампер, то вам явно понадобится средний ток 1 ампер.Для этого при рабочем цикле 33% у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь ток в 3 ампера даст в 9 раз (я возведен в квадрат) эффект нагрева, равный 1 амперам непрерывного действия.
Но если 3 ампера протекают только 1/3 от общего времени — значит, нагрев двигателя в 9 раз за 1/3 времени — или в 3 раза больше, чем устойчивый 1 ампер! Говорят, что этот сигнал имеет «форм-фактор» 3 (или это 33% — без сомнения, кто-то меня поправит!)
Однако — если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным.Например, двигатель Lynch имеет индуктивность всего 39 микрогенри (это один из известных мне двигателей с самой низкой индуктивностью) и сопротивление 0,016 Ом. «Постоянная времени» для цепи L-R равна L / R, что (для двигателя Lynch) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 микрогенри, а сопротивление 40 миллиом, что дает постоянную времени 5 мсек.
Как показывает практика и чтобы избежать излишних математических вычислений, период повторения импульсов должен быть значительно короче постоянной времени двигателя.
Другие факторы, влияющие на PRF:
Если он находится в звуковом диапазоне, двигатель может издавать вой (вызванный явлением, известным как «магнитострикция», поэтому держитесь выше звукового диапазона.
Схема MOSFET рассеивает больше всего при переключении из одного состояния в другое, поэтому частота не должна быть слишком высокой — MOSFET можно использовать с осторожностью до 100 кГц, но это становится немного выше.
Радиочастотное излучение: они увеличиваются с увеличением частоты, поэтому сохраняйте частоту как можно ниже!
Очевидно, что трудно выбрать «лучший» компромисс между ними, но оптимальная частота, по-видимому, составляет около 20 кГц.
Послесловие
Очевидно, что этот сценарий охватывает лишь небольшую часть задействованной технологии: взгляните на спецификацию нашего Pro-120. У этого есть линейные линейные ускорения и замедления, ограничение чрезмерного разряда, блокировка высоких педалей, двойное изменение направления движения, ограничение тока рекуперации, защита от обратной полярности, а также все пункты, упомянутые здесь. Мы также указываем 110 ампер на 1 минуту: правда в том, что мы получаем около 120 ампер за одну минуту. Мы также не знаем «честного» способа его уничтожить: даже короткое замыкание двигателя не приведет к его повреждению.Движение задним ходом на полной скорости безопасно. Переворачивание аккумулятора безопасно. Отключение аккумулятора на полной скорости безопасно (для контроллера, но не ожидайте, что это затормозит машину). Затем мы попытались защитить его от всего, что могут сделать с ним нетехнические заказчики. Мы думаем, что добились успеха — пока, конечно, не найдем клиента умнее нас! Даже если бы я был готов попробовать, есть способ выразить словами весь опыт, необходимый для разработки такого контроллера, не говоря уже о том, чтобы получить прибыль от его продажи по той цене, которую мы делаем.Если вы в это не верите, попробуйте запросить единовременную цену на любой аналогичный контроллер.
Другие страницы, имеющие отношение к этому:
Все эти страницы находятся в личном кабинете.
PWM Part 2 Имеет дело с ранними схемами 2QD. Включает принципиальную схему и описание.
PWM Часть 3 Развитие серии 2QD. Позже схема и изменения в деталях.
ШИМ Часть 4 Современная серия 2QD. Подробное обсуждение. Включает
- Предел тока при рекуперативном торможении
- использование полевого МОП-транзистора Hiside в качестве синхронного выпрямителя без регенерации.
ШИМ, часть 5 Вращение и реверс. Контроллеры серии NCC, разработанные на основе 2QD.
PWM Часть 6 Формы сигналов и коммутация в полумосте MOSFET
ШИМ-управление скоростью двигателя. Часть 7. Начинается работа с полным мостовым управлением.
Схема, плата и конструктивные особенности серии 2QD
Информация о странице
© 1996-2011 4QD-TECАвтор страницы: Ричард Торренс
Управление скоростью двигателя постоянного тока с использованием широтно-импульсной модуляции (ШИМ)
Методы широтно-импульсной модуляции (ШИМ) или изменения рабочего цикла обычно используются при управлении скоростью двигателей постоянного тока.Рабочий цикл определяется как процентное соотношение цифровой «высокой» к цифровой «низкой» плюс цифровой «высокой» ширины импульса в течение периода ШИМ. На рис. 1 показаны импульсы 5 В с рабочим циклом от 0% до 50%.
Рис. 1. Плюсы с рабочим циклом от 0% до 50%Среднее значение постоянного напряжения для рабочего цикла 0% равно нулю; при рабочем цикле 25% среднее значение составляет 1,25 В (25% от 5 В). При рабочем цикле 50% среднее значение составляет 2,5 В, а при рабочем цикле 75% среднее напряжение составляет 3,75 В и так далее. Максимальный рабочий цикл может составлять 100%, что эквивалентно форме сигнала постоянного тока.Таким образом, изменяя ширину импульса, мы можем изменять среднее напряжение на двигателе постоянного тока и, следовательно, его скорость.
Принципиальная схемаСхема простого регулятора скорости для мини-двигателя постоянного тока, такого как тот, который используется в магнитофонах и игрушках, показана на рис. 2.
Рис. 2: Управление скоростью двигателя постоянного тока с использованием метода ШИМОписание схемы:
Здесь инвертирующий триггер Шмитта N1 сконфигурирован как нестабильный мультивибратор с постоянным периодом, но переменной скважностью. Хотя полное внутрисхемное сопротивление VR1 во время полного цикла составляет 100 кОм, часть, используемая во время положительных и отрицательных периодов каждого цикла, может быть изменена путем изменения положения его контакта стеклоочистителя для получения переменной ширины импульса.Затвор Шмитта N2 просто действует как буфер / драйвер для управления транзистором T1 во время положительных воздействий на его базу. Таким образом, средняя амплитуда импульсов привода постоянного тока или скорость двигателя M пропорциональна настройке положения стеклоочистителя потенциометра VR1. Конденсатор C2 служит накопительным конденсатором для обеспечения стабильного напряжения в цепи.
Таким образом, изменяя VR1, рабочий цикл может быть изменен от 0% до 100%, а скорость двигателя от «остановленного» состояния до «полной скорости» равномерно и непрерывно.Диоды эффективно обеспечивают различные значения резистора синхронизации во время зарядки и разрядки конденсатора синхронизации C1.
Рис. 3. Конфигурация контактов BC337A. Период импульса или покоя приблизительно определяется следующим уравнением: период импульса или покоя ≈ 0,4 x C1 (Фарада) x VR1 (Ом) секунд. Здесь используйте внутрисхемное значение VR1 во время импульса или периода покоя, если это применимо.
Частота останется постоянной и определяется уравнением:
Частота ≈ 2,466 / (VR1.C1) ≈ 250 Гц (для VR1 = 100 кОм и C1 = 0,1 мкФ)
Рекомендуемое значение внутрисхемного сопротивления должно быть больше 50 кОм, но меньше 2 мегаом, а емкость конденсатора должна быть больше 100 пФ, но меньше 1 мкФ.
Больше интересных проектов можно найти здесь.
Эта статья была впервые опубликована 28 июня 2017 г. и обновлена 23 июля 2019 г.
Как сделать регулятор скорости двигателя постоянного тока 50 В, 15 А
Всем привет! Это учебное пособие по контроллеру скорости двигателя постоянного тока 50 В, 15 А.И это наиболее полная схема регулятора скорости двигателя постоянного тока, которую вы найдете в Интернете.
Контроллер скорости двигателя постоянного тока Видео:
1. Этот регулятор скорости принимает входное напряжение от 6 до 50 В.
2. МАКС. выходной ток 15А при использовании подходящего радиатора,
3. Имеют защиту от перенапряжения ворот и
4. Защита от обратного хода или скачков напряжения.
Помимо этого, эту схему можно легко использовать с платой микроконтроллера Arduino или аналогичной, если вы не хотите зацикливаться на конденсаторах, резисторах и проводах.
После подключения необходимого входа напряжения и двигателя к выходной клемме скорость двигателя увеличивается или уменьшается с помощью потенциометра.
2. Упрощение схемы контроллера скорости двигателя постоянного тока
На первый взгляд эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
1) Регулятор напряжения или понижающий преобразователь
2) Генератор ШИМ.
3) Цепь переключения.
Теперь давайте разберемся с каждой частью по очереди.
Для лучшего понимания я сначала прохожу через схему переключения:
2.1 ЦЕПЬ ПЕРЕКЛЮЧЕНИЯ
Цепь переключения регулятора скорости двигателя постоянного тока
Схема переключения , как следует из названия, используется для включения и выключения выхода, но с очень высокой частотой.Здесь для выполнения этой работы используется Mosfet. Mosfet может переключать высокое выходное напряжение, подключенное между его стоком и истоком, если на его затвор подается пороговое напряжение. Это пороговое напряжение обычно намного меньше, чем напряжение, которое может переключать Mosfet, или напряжение между стоком и истоком. Кроме того, по мере того, как напряжение на затворе Mosfet увеличивается сверх порогового напряжения затвора, все больше и больше тока проходит через сток к источнику.
Здесь предостережение : Пороговое напряжение — это напряжение, при котором полевой МОП-транзистор начинает немного проводить.Чтобы полевой МОП-транзистор проводил достаточно, чтобы управлять значительной нагрузкой, ему также необходимо дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком полевого МОП-транзистора, напряжение на нем и, следовательно, скорость могут контролироваться путем управления напряжением затвора. А для этого нам понадобится переменное напряжение на затворе.
2.2 ЦЕПЬ ГЕНЕРАТОРА ШИМ
Цепь генератора ШИМ контроллера скорости двигателя постоянного тока
Теперь на помощь приходит генератор PWM .Это переменное напряжение можно легко получить с помощью напряжения ШИМ. ШИМ или широтно-импульсная модуляция — это метод, используемый для получения любого напряжения между 0 и максимумом входного напряжения. Это достигается переключением входного напряжения на определенной частоте и определенном рабочем цикле.
Предположим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если он включается и выключается с очень высокой частотой, мы получаем прямоугольную форму волны. Допустим, время включения составляет 50% от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2.5вольт. По мере увеличения времени включения или рабочего цикла общее напряжение увеличивается. И когда рабочий цикл достигает 100%, мы получаем выходное напряжение 5 вольт. Точно так же, когда он находится на уровне 0%, мы получаем выход 0 вольт. Это называется МОДУЛЯЦИЯ ШИРИНЫ ИМПУЛЬСА, поскольку мы модулируем ширину импульса, чтобы получить переменное напряжение.
Подробнее о ШИМ здесь: Подробнее о ШИМ
Форма сигнала ШИМ
Здесь контроллер скорости генерирует сигнал ШИМ с помощью таймера 555 IC . Эта ИС обеспечивает необходимое переменное напряжение на затворе полевого МОП-транзистора, работая в нестабильном режиме.Теперь существует определенный предел входного напряжения IC, который, несомненно, меньше предельного напряжения этого регулятора скорости. Следовательно, чтобы обеспечить подходящее рабочее напряжение для микросхемы таймера 555, используется схема регулятора напряжения, которая подает фиксированное напряжение на микросхему. Для этого в схеме используется регулятор напряжения LM317 .
2,3 ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ
Цепь регулятора напряжения регулятора скорости двигателя постоянного тока
Здесь используется стабилизатор напряжения LM317.Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ перед другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулировка нагрузки .
Подробнее о регуляторах напряжения здесь: Подробнее о регуляторах напряжения
3. Принципиальная схема регулятора скорости двигателя постоянного тока
Схема контроллера скорости двигателя постоянного тока
Давайте рассмотрим схему более подробно, а также все компоненты, необходимые для создания этого регулятора скорости:
Я использую настольный источник питания для питания схемы.И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
4. Необходимые компоненты:
- Регулятор напряжения LM317
- Таймер 555
- IRF3205S n-канальный Mosfet
- Конденсатор 330 мкФ (63В)
- Конденсатор 220 мкФ (63В)
- Конденсатор 47 мкФ (63В)
- Керамические конденсаторы 10 нФ X 3
- резисторов 1 кОм X 2
- Резистор 330 Ом
- 6.Резистор 2 кОм
- Резистор 100 Ом
- 1n4007 диодов X 3
- 16 А диод Шоттки
- Потенциометр 100k
- Резистор 33 Ом
- Стабилитрон 10 В
5. Как работает регулятор скорости
5.1 Конденсатор емкостью 330 мкФ подключен к клеммам входного питания для сглаживания постоянного тока. За ним следует резистор на 330 Ом, соединенный последовательно с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.Этот регулятор напряжения запрограммирован с использованием двух резисторов (R3 и R2) для обеспечения постоянного напряжения 9 вольт. Стоит отметить, что для обеспечения выхода 9 В, однако, падение напряжения должно быть больше 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от указанного, вам необходимо изменить номиналы этих резисторов в соответствии с формулой частоты, указанной в таблице данных.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 равно 6.2k, а R1 — 1k. Поскольку Идж. находится в диапазоне uA, просто игнорируйте его здесь. Это дает нам выходное напряжение 9 вольт. Эти 9 вольт затем питают таймер 555 . Здесь мы используем таймер 555 в нестабильном режиме, что означает просто генератор ШИМ.
ШИМ Напряжение, генерируемое таймером 555
5.2 1 контакт микросхемы заземлен. 2 и 6 соединены вместе, а также 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт. Теперь резистор 1 кОм , 2 диода 1N4007 , потенциометр 100 кОм и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая выход ШИМ на третьем выводе таймера 555.Этот выход PWM управляет затвором Mosfet. Если вы хотите узнать больше о таймерах 555 и о том, как они генерируют волны ШИМ, я предлагаю вам просмотреть множество отличных статей, доступных в Интернете.
Подробнее о 555 таймерах здесь: 555 Подробнее о таймере
Некоторые 555 проектов таймера с подробным объяснением: 555 Таймер проектов
Цепь зарядки-разрядки RC
5,3 Самым важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для того же самого.Вы также можете рассчитать частоту вывода ШИМ с помощью онлайн-калькуляторов.
| Частота = 1,44 / (R1 + 2 × R2) × C1 Гц |
Загрузите техническое описание таймера 555 отсюда: техническое описание таймера 555
Калькулятор частоты ШИМ таймера 555: Калькулятор частоты таймера 555
Размещение значения R1 (1 кОм), емкости (около 7 нФ из-за допуска и других факторов) и значения потенциометра, которое в моем случае составляет примерно 91 кОм.Это дает нам частоту 1100 Гц. Конечно, это неточно из-за нескольких других факторов, влияющих на схему. Фактическая частота составляет 1,3 кГц, что почти постоянно в диапазоне от 0 до 100% рабочего цикла выходного сигнала ШИМ.
5,4 Этот выход ШИМ управляет затвором Mosfet , подключенным через резистор на 33 Ом. IRF3205S может выдерживать ток до 110 А при надлежащей системе охлаждения и достаточном напряжении на затворе. Предел напряжения между стоком и источником составляет максимум 55 В.тогда как напряжение между затвором и источником составляет максимум 20 В.
Источник полевого МОП-транзистора заземлен, сток подключен к одной клемме выхода, а другая клемма — к 12 В. Таким образом, двигатель подключается между плюсом питания 12 В и стоком полевого МОП-транзистора . Теперь, чтобы защитить полевой МОП-транзистор от скачков напряжения, вызванных двигателем, диод Шоттки подключен к двигателю или между стоком и плюсом источника питания 12 В.
Подробнее о обратных диодах можно узнать здесь: Основные сведения о обратных диодах
5.5 Диоды Шоттки обычно предпочтительны в обратных диодах, потому что они имеют наименьшее прямое падение (~ 0,2 В, а не> 0,7 В для малых токов) и способны быстро реагировать на обратное смещение (когда индуктор повторно активируется) или, другими словами, диоды Шоттки имеют эффективное мгновенное время обратного восстановления, следовательно, подходят для высокочастотных приложений.
6. Контроллер скорости двигателя постоянного тока в действии
Контроллер скорости двигателя постоянного тока в действии
Потенциометр контролирует скорость двигателя.А сигнал ШИМ, генерируемый таймером 555, отображается на осциллографе. Также можно измерить такие измерения, как рабочий цикл и Vpk-pk .
7. Важные моменты регулятора скорости двигателя постоянного тока
7.1 Для защиты от перенапряжения используйте стабилитрон между затвором и истоком МОП-транзистора, как указано на схеме.
7.2 Двигатель, которым я здесь управляю, рассчитан на 12 В и потребляет до 2 А при максимальной нагрузке, что не так уж и много для нагрузки.Следовательно, частота ШИМ 1 кГц здесь подойдет, но для больших двигателей частота должна быть выше 15 кГц. А чтобы отрегулировать частоту ШИМ, измените значение потенциометра или конденсатора, чтобы получить желаемую выходную частоту. Так что имейте это в виду при использовании больших нагрузок.
Поскольку этот пост уже слишком длинный, я подумал, почему бы не осветить часть управления Arduino в другом посте. Таким образом, я могу сделать учебники более информативными, не беспокоясь о длине поста.
Нравится:
Нравится Загрузка…
Связанные Контроллеры скорости
для двигателей постоянного тока и BL
Контроллеры скорости FAULHABER специально разработаны для получения максимальной отдачи от двигателей FAULHABER DC и BL. Они компактны, просты в эксплуатации и обеспечивают точное и эффективное управление скоростью. Индивидуальное регулирование скорости можно легко настроить с помощью компьютера и бесплатного программного обеспечения «FAULHABER Motion Manager».
Speed Control от FAULHABER — это высокодинамичные контроллеры скорости для управления:
В зависимости от размера и состояния поставки на контроллере скорости могут использоваться различные комбинации двигателей и датчиков.Различные размеры, а также гибкие возможности подключения открывают широкий спектр применений в таких областях, как лабораторная техника и производство оборудования, технологии автоматизации, манипуляционные и инструментальные устройства, станки или насосы.
Регуляторы скоростиот FAULHABER могут быть адаптированы к данному приложению с помощью программного обеспечения FAULHABER Motion Manager. С помощью контроллеров скорости можно настроить рабочий режим, параметры контроллера, а также тип и масштаб спецификации уставки.Для настройки контроллеров скорости используется USB-адаптер для программирования.
Режимы работы двигателей в сочетании с регуляторами скорости
Скорость двигателя регулируется с помощью ПИ-регулятора с изменяемыми параметрами. В зависимости от версии скорость в регуляторе скорости определяется через подключенную сенсорную систему или бездатчиковую по току двигателя. Задание уставки может быть выполнено с использованием аналогового значения или сигнала ШИМ.
