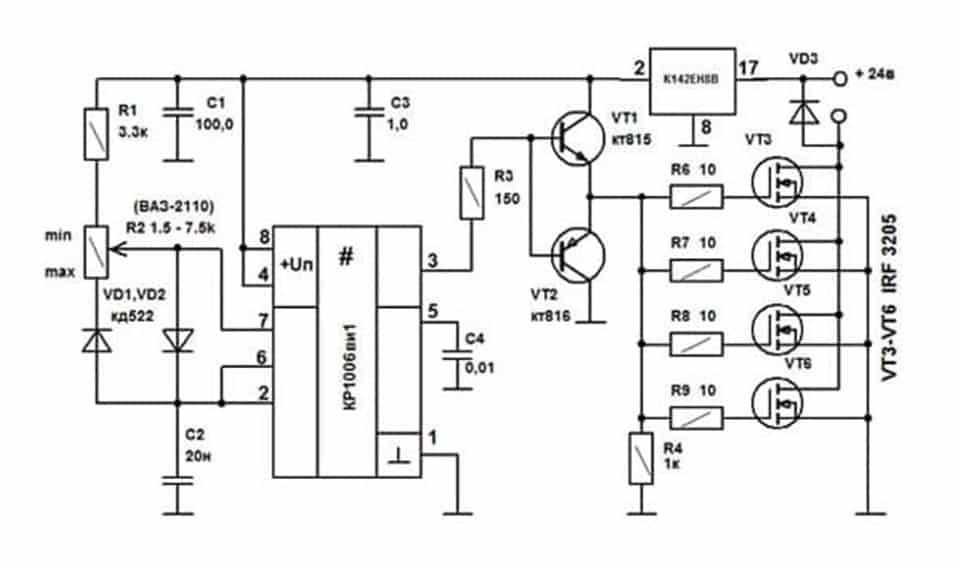
Как работает ШИМ-регулирование скорости двигателя постоянного тока. Какие преимущества дает использование ШИМ для управления двигателем. Какие схемы и контроллеры применяются для ШИМ-управления двигателями постоянного тока.
Что такое ШИМ-управление двигателем постоянного тока
ШИМ (широтно-импульсная модуляция) — это эффективный метод управления скоростью вращения двигателя постоянного тока. При ШИМ-регулировании на двигатель подаются короткие импульсы напряжения с изменяемой длительностью. Чем длиннее импульс, тем выше скорость вращения двигателя.
Основные преимущества ШИМ-управления:
- Высокий КПД, низкие потери мощности
- Плавное регулирование скорости в широком диапазоне
- Простота реализации на микроконтроллерах
- Возможность точного цифрового управления
Принцип работы ШИМ-регулирования двигателя постоянного тока
При ШИМ-управлении на обмотки двигателя подается последовательность импульсов напряжения фиксированной амплитуды и частоты. Регулирование скорости осуществляется за счет изменения длительности (ширины) импульсов.
Ключевые параметры ШИМ-сигнала:
- Период — время между началом импульсов
- Частота — количество импульсов в секунду
- Скважность — отношение периода к длительности импульса
- Коэффициент заполнения — отношение длительности импульса к периоду
Чем выше коэффициент заполнения, тем больше среднее напряжение на двигателе и выше скорость вращения. При 100% заполнении двигатель вращается на максимальной скорости.
Схемы ШИМ-управления двигателем постоянного тока
Для реализации ШИМ-управления двигателем постоянного тока применяются следующие схемы:
Схема с одним ключом
Простейшая схема содержит один электронный ключ (транзистор), который коммутирует напряжение на двигателе. Применяется для маломощных двигателей.
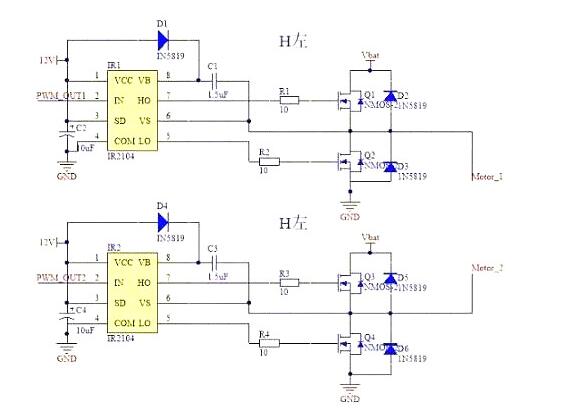
Мостовая схема
Позволяет управлять направлением вращения двигателя. Содержит 4 ключа, образующих Н-мост. Обеспечивает реверс и торможение двигателя.
Схема с обратной связью по скорости
Включает датчик скорости (например, энкодер) и контроллер для поддержания заданной скорости вращения независимо от нагрузки.
Микросхемы и модули для ШИМ-управления двигателями постоянного тока
Для практической реализации ШИМ-управления двигателями постоянного тока применяются:
Специализированные драйверы двигателей
Микросхемы, содержащие силовые ключи и схему управления. Например, L298, L293D.
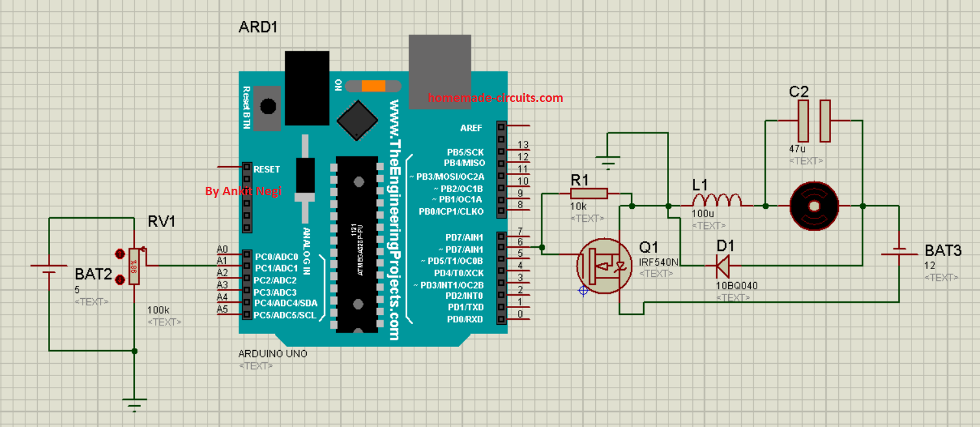
Микроконтроллеры со встроенными ШИМ-модулями
Позволяют программно формировать ШИМ-сигнал для управления двигателем. Например, Arduino, STM32.
Готовые ШИМ-контроллеры
Модули с регулятором скорости и силовыми ключами. Обеспечивают простое подключение двигателя.
Преимущества ШИМ-управления по сравнению с аналоговым
ШИМ-регулирование имеет ряд преимуществ перед аналоговым управлением двигателем постоянного тока:
- Меньший нагрев силовых элементов
- Возможность точного цифрового управления
- Простота реализации на микроконтроллерах
- Широкий диапазон регулирования скорости
Как рассчитать параметры ШИМ-сигнала для управления двигателем
Для расчета параметров ШИМ-сигнала необходимо:

- Выбрать частоту ШИМ (обычно 1-20 кГц)
- Рассчитать период T = 1/f
- Задать необходимую скорость вращения в % от максимальной
- Рассчитать длительность импульса t = T * скорость/100%
- Вычислить коэффициент заполнения D = t/T * 100%
Например, для частоты 10 кГц и скорости 75% от максимальной:
- T = 1/10000 = 100 мкс
- t = 100 * 75/100 = 75 мкс
- D = 75/100 * 100% = 75%
Применение ШИМ-управления в промышленных электроприводах
ШИМ-регулирование широко применяется в современных промышленных электроприводах постоянного тока:
- Станки с ЧПУ
- Промышленные роботы
- Конвейерные системы
- Подъемно-транспортное оборудование
- Электротранспорт
Использование ШИМ позволяет создавать высокоэффективные системы управления с точным регулированием скорости и момента двигателей.
Программная реализация ШИМ-управления на микроконтроллерах
Современные микроконтроллеры имеют встроенные аппаратные модули ШИМ, что упрощает программную реализацию управления двигателем. Типовой алгоритм:
- Настройка выводов микроконтроллера
- Инициализация ШИМ-модуля
- Установка частоты ШИМ
- Изменение коэффициента заполнения для регулирования скорости
Пример для Arduino:
int pwmPin = 9; // ШИМ-вывод int speed = 0; // Скорость 0-255 void setup() { pinMode(pwmPin, OUTPUT); } void loop() { analogWrite(pwmPin, speed); // Установка ШИМ speed = map(analogRead(A0), 0, 1023, 0, 255); // Чтение потенциометра }
Заключение
ШИМ-управление является эффективным методом регулирования скорости двигателей постоянного тока. Оно обеспечивает высокий КПД, широкий диапазон регулирования и простоту реализации. Применение ШИМ позволяет создавать современные высокоэффективные электроприводы для различных отраслей промышленности.
Управление двигателем постоянного тока — схема и важные нюансы
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
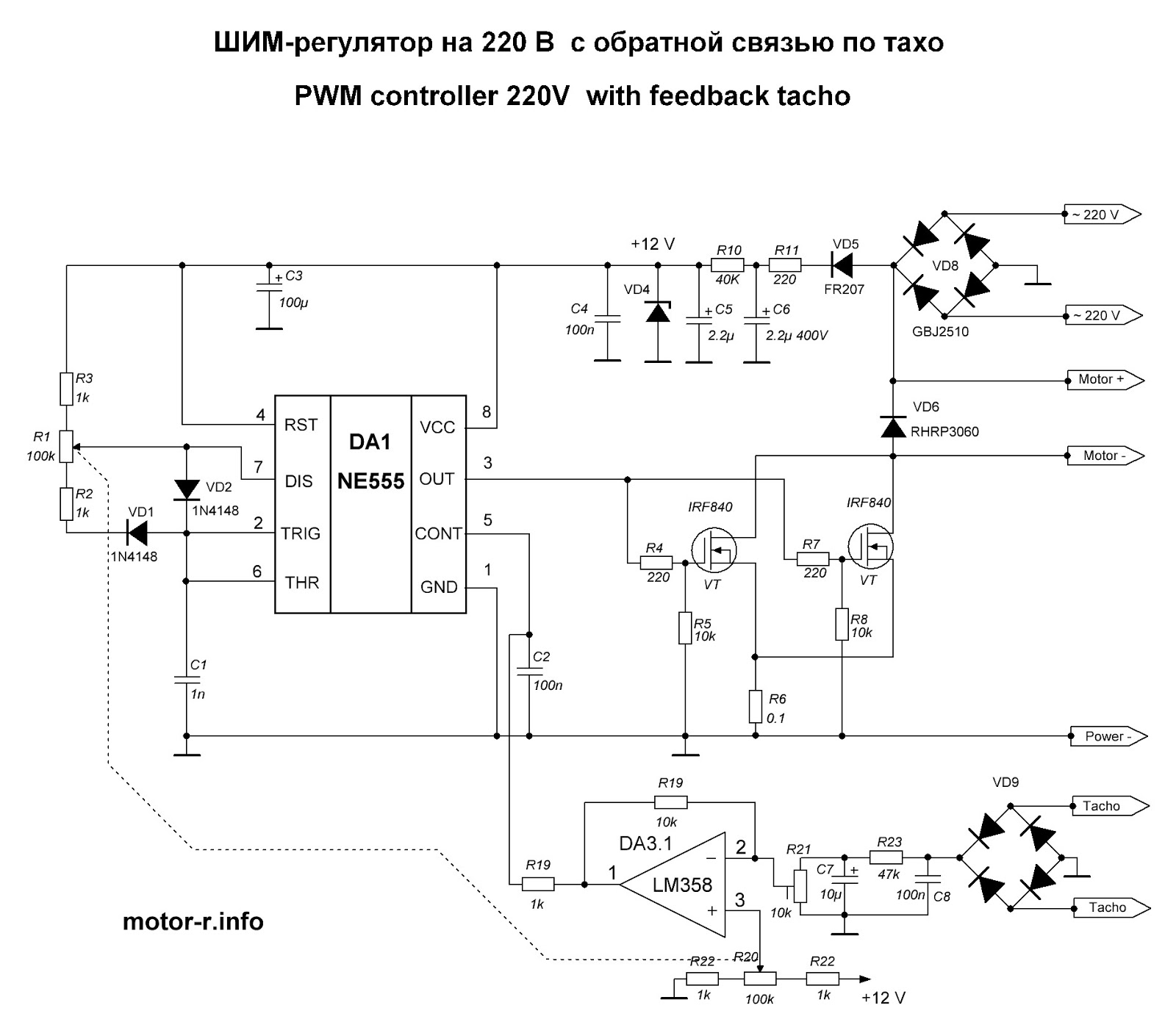
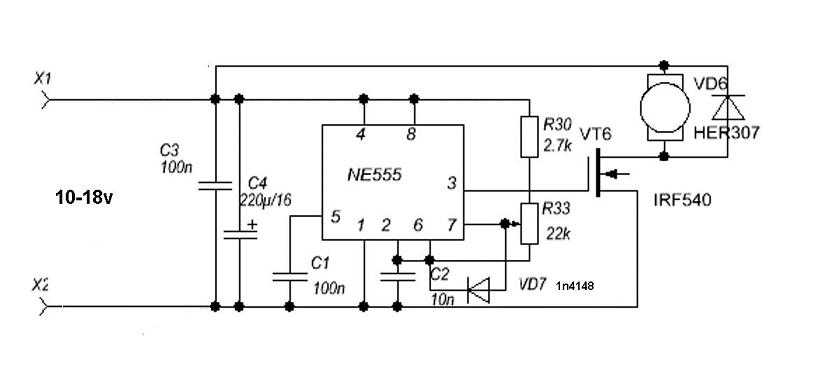
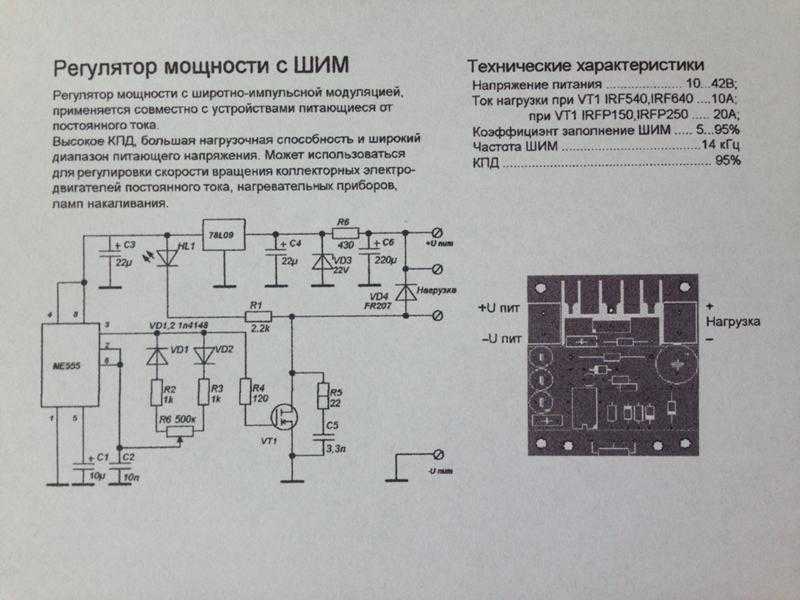
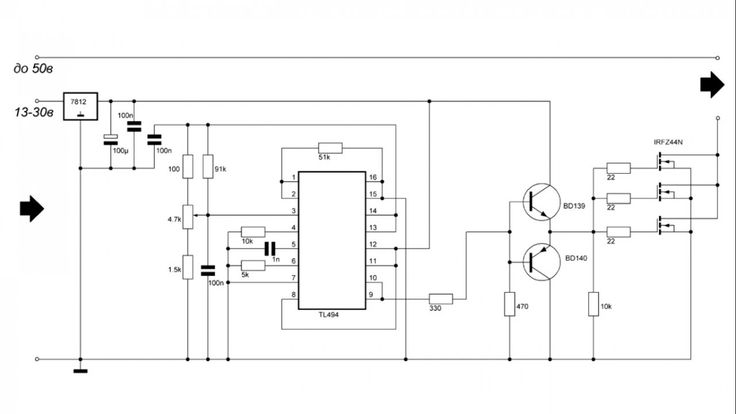
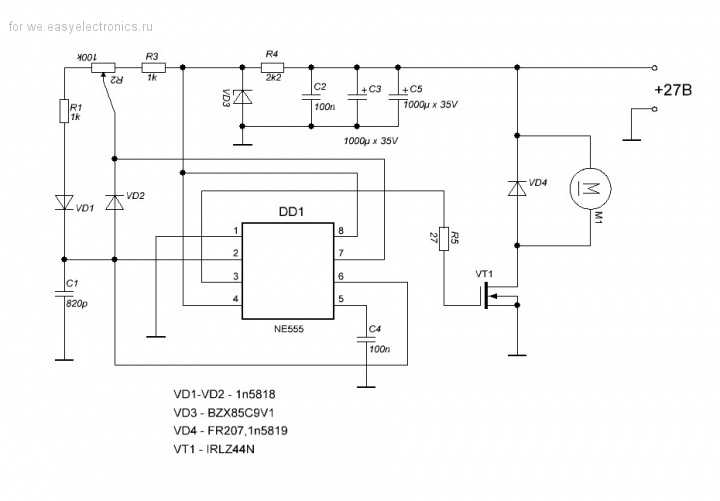
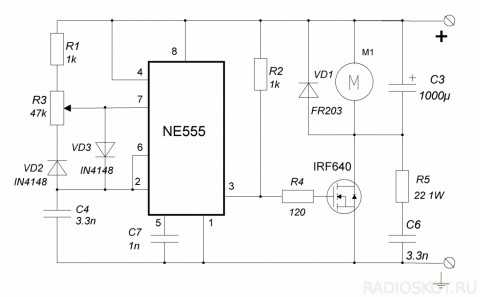
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
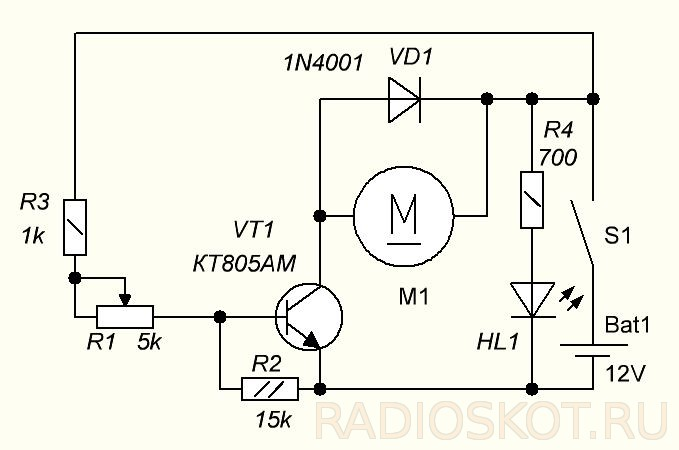
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем.![]() Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.
Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.
Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Шим контроллер двигателя постоянного тока BMD-20DIN. Регулятор оборотов двигателя постоянного тока
Заказать
Описание в PDF
Технические характеристики
| Напряжение питания, стабилизированнное, В | 12. ..24 ..24 |
| Максимальный номинальный ток двигателя, А | 20 |
| Аппаратная защита от короткого замыкания, А | 30 |
| Ток срабатывания защиты от перегрузки, А | 0,1…20 |
| Диапазон регулирования скорости | 1 : 100 |
| Габаритные размеры, мм, не более | 120 х 100 х 23 |
Скачать паспорт .pdfОписание .pdf 3D модель .step
Блок управления BMD‑20DIN ver.2 — это регулятор оборотов коллекторного двигателя постоянного тока. Блок управления BMD‑20DIN ver. 2 предназначен для управления коллекторным двигателем c напряжением питания до 30 В и мощностью до 500 Вт. Возможно управление скоростью коллекторного двигателя аналоговым сигналом 0…5В, −10…+10В, 4.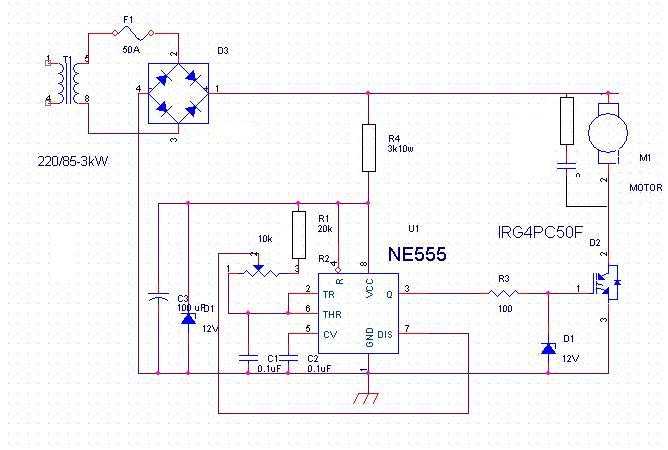 ..20мА (токовая петля), ШИМ с частотой 50Гц, либо встроенным или внешним потенциометром. Разгон и торможение двигателя задаются внутренними регуляторами, входящими в конструкцию устройства.
..20мА (токовая петля), ШИМ с частотой 50Гц, либо встроенным или внешним потенциометром. Разгон и торможение двигателя задаются внутренними регуляторами, входящими в конструкцию устройства.
Габаритные размеры блоков управления коллекторным двигателем постоянного тока BMD‑20DIN ver. 2
Крепление блока BMD-20DIN ver.2 осуществляется на DIN-рейку ТН-35-7,5 ГОСТ Р МЭК 60715-2003
Схема подключения блоков управления коллекторным двигателем постоянного тока BMD‑20DIN ver. 2
При больших токах рекомендуется располагать источник питания в непосредственной близости от блока и использовать обе линии как питающих, так и фазных клемм.
Режимы работы блока управления BMD‑20DIN ver. 2
Регулирование скорости встроенным потенциометром «SPEED»
При управлении скоростью коллекторного двигателя с использованием встроенного потенциометром «SPEED» дополнительных подключений не требуется. Крайнее положение регулятора оборотов по часовой стрелке соответствует максимальной скорости вращения коллекторного двигателя. Крайнее положение регулятора против часовой стрелки соответствует минимальной скорости.
Крайнее положение регулятора оборотов по часовой стрелке соответствует максимальной скорости вращения коллекторного двигателя. Крайнее положение регулятора против часовой стрелки соответствует минимальной скорости.
Регулирование скорости внешним потенциометром
В случае регулирования оборотов двигателя с использованием внешнего потенциометра, максимальная скорость соответствует крайнему положению регулятора, при котором на вход «SPEED» поступает напряжение 5 В. Минимальная скорость вращения соответствует положению потенциометра, при котором на вход «SPEED» подаётся напряжение 0 В. Рекомендуемое сопротивление внешнего потенциометра: 2,2…4,7 кОм.
Регулирование скорости аналоговым сигналом — напряжение 0…5 В
В случае управления коллекторным двигателем с использованием внешнего аналогового сигнала 0…5В, В случае управления коллекторным двигателем с использованием внешнего аналогового сигнала 0…5В, скорость вращения пропорциональна уровню напряжения на входе «SPEED».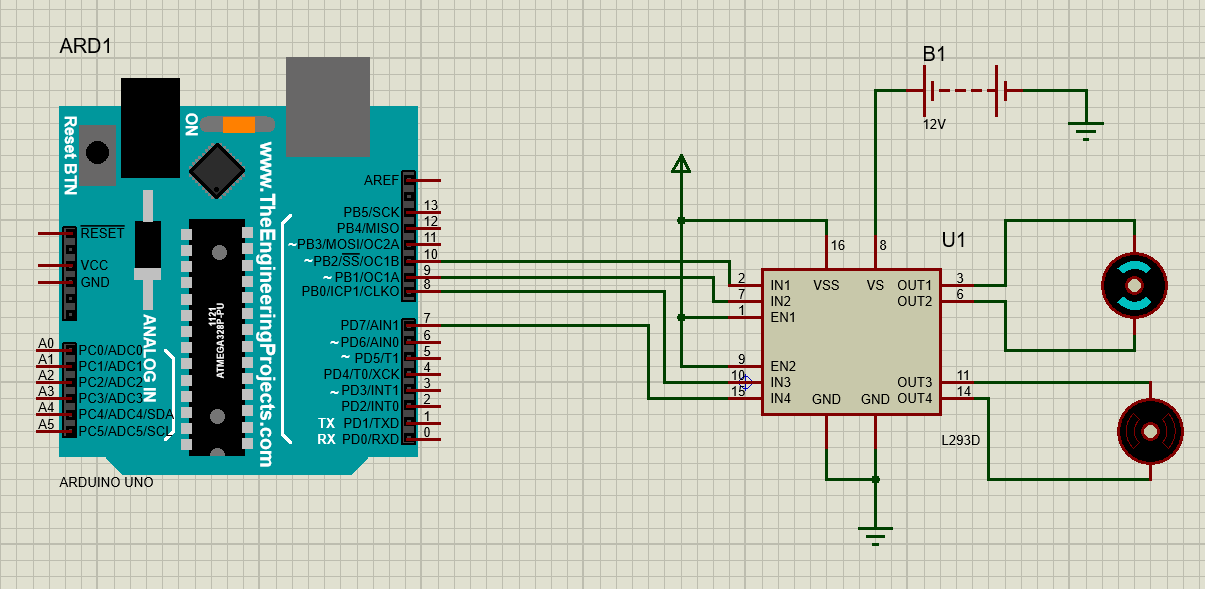 Максимальная скорость двигателя соответствует уровню сигнала 5 В, минимальная скорость —
0 В.
Максимальная скорость двигателя соответствует уровню сигнала 5 В, минимальная скорость —
0 В.
Регулирование скоростинапряжением внешнего сигнала -10…+10В
При управлении скоростью аналоговым сигналом — 10…+10В, минимальная скорость (остановка двигателя) соответствует уровню сигнала 0 В, максимальная скорость в прямом направлении соответствует уровню сигнала +10В. Максимальная частота вращения в реверсном направлении соответствует уровню сигнала — 10В. Данный вид регулирования оборотов двигателя является стандартным для большинства промышленных систем управления.
Регулирование скорости аналоговым сигналом 4…20 мА
При управлении скоростью токовым сигналом
4…20 мА, максимальная частота оборотов коллекторного двигателя соответствует уровню сигнала 20 мА, минимальная частота — уровню 4 мА.
Регулирование скорости с использованием аналогового токового сигнала имеет ряд преимуществ, принципиально важных в промышленных системах: высокая помехозащищённость, точность передачи сигнала и независимость качества связи от длины линии.
Регулирование скорости скважностью внешнего сигнала ШИМ
Регулирование скорости вращения коллекторного двигателя может осуществляться сигналом ШИМ с частотой 50Гц. Минимальная скорость (остановка двигателя) соответствует длительности импульса 1540 мкс. Максимальная скорость вращения в прямом направлении соответствует длительности импульса 544 мкс. Максимальная скорость вращения в реверсном направлении соответствует длительности импульса 2400 мкс.
Снятие характеристик шаговых двигателей. Зависимость крутящего момента от скорости вращения.
Применение блока управления BMD‑20DIN ver. 2 обеспечивает сохранение крутящего момента при значительном снижении скорости двигателя. На видео показана работа коллекторного двигателя постоянного тока на испытательном динамометрическом стенде НПО Электропривод. Лаболаторно измеренные значения крутящего момента двигателя не изменяются при понижении частоты вращения. Регулировка оборотов двигателя на стенде выполнялась в диапазоне 50–2000 об/мин.
Регулировка оборотов двигателя на стенде выполнялась в диапазоне 50–2000 об/мин.
С этим товаром покупают
-
LM18‑33016NA‑L
Индуктивные бесконтактные датчики
подробнее -
Источники питания постоянного тока
подробнее -
ОВЕН ПР200
Программируемые реле с дисплеем
подробнее
Заполните, пожалуйста, форму обратной связи,
и мы свяжемся с вами в ближайшее время.
Подтверждаю согласие на обработку персональных данных и принимаю политику конфиденциальности
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.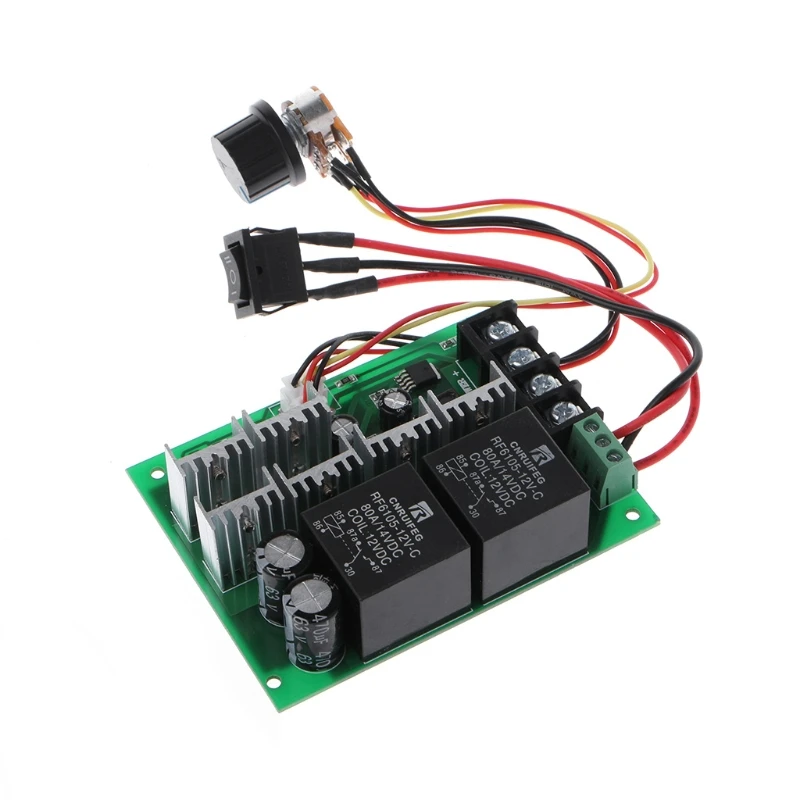
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные. Дополняются схемами с параллельной и последовательной искусственной коммутацией.
- С запираемыми тиристорами. Схема работы мало отличима от транзисторных.
- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.
Так же по теме ШИМ регулирования предлагаем статью «Регулирование скорости вращения коллекторного двигателя постоянного тока»
Модуль управления двигателем постоянного тока в Украине. Цены на Модуль управления двигателем постоянного тока на Prom.ua
ШИМ регулятор оборотов двигателя постоянного тока 6В-60В 15A/20А 15кГц с индикацией
На складе в г.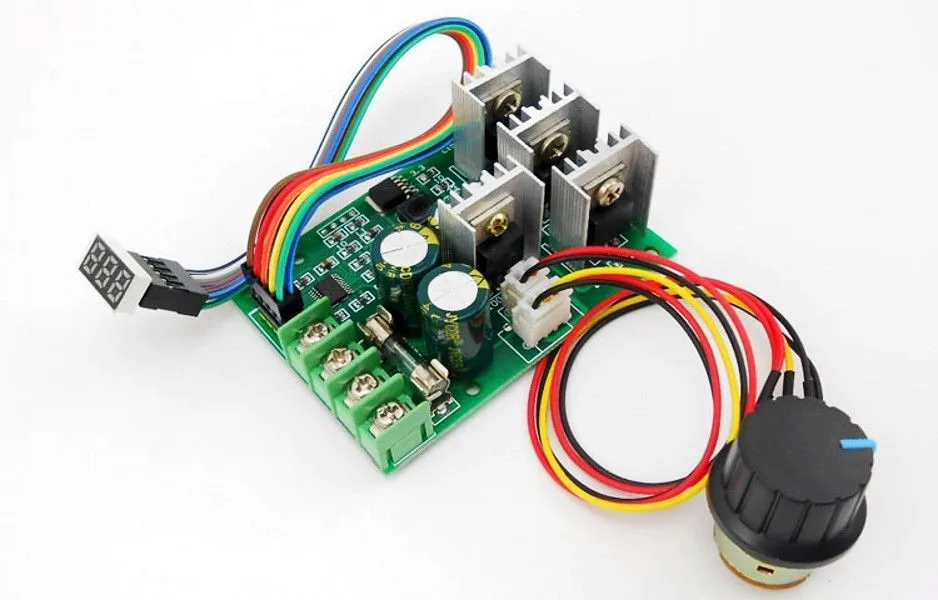 Кропивницкий
Кропивницкий
Доставка по Украине
390 грн
Купить
Sxemki.com
Многочастотный ШИМ/CLK бесщеточный контроллер скорости двигателя постоянного тока 12В-24В BLDC
На складе в г. Кропивницкий
Доставка по Украине
по 200 грн
от 2 продавцов
200 грн
Купить
Sxemki.com
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 5-16В 10А
На складе в г. Полтава
Доставка по Украине
79.90 грн
Купить
Интернет магазин «E-To4Ka»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 4.5-35В 0-5А
На складе в г. Полтава
Доставка по Украине
52.99 грн
Купить
Интернет магазин «E-To4Ka»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 10-60В 20А
На складе в г. Полтава
Доставка по Украине
254. 40 грн
40 грн
Купить
Интернет магазин «E-To4Ka»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 6-28В 3А
На складе в г. Полтава
Доставка по Украине
110.90 грн
Купить
Интернет магазин «E-To4Ka»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 10-55В 60А
На складе в г. Полтава
Доставка по Украине
629.60 грн
Купить
Интернет магазин «E-To4Ka»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 1.8-15В 2А
Доставка из г. Полтава
по 73.6 грн
от 2 продавцов
73.60 грн
Купить
USCompany
DRV8833 2-канальный модуль драйвера двигателя постоянного тока плата 1.5A 3В-10В
Доставка из г. Днепр
по 47 грн
от 2 продавцов
47 грн
Купить
Radio Store
Радиоконструктор Регулятор PWM 0.3KW оборотов двигателя постояйнного тока М124. М1 Модуль
М1 Модуль
Доставка из г. Днепр
по 150.4 грн
от 3 продавцов
150.40 грн
Купить
Radio Store
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 4.5-35В 0-5А
На складе в г. Полтава
Доставка по Украине
52.99 грн
Купить
IT Electronics
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 10-60В 20А
На складе в г. Полтава
Доставка по Украине
255.30 грн
Купить
IT Electronics
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 5-16В 10А
На складе в г. Полтава
Доставка по Украине
79.90 грн
Купить
IT Electronics
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 6-28В 3А
На складе в г. Полтава
Доставка по Украине
111. 60 грн
60 грн
Купить
IT Electronics
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 10-55В 60А
На складе в г. Полтава
Доставка по Украине
629.90 грн
Купить
IT Electronics
Смотрите также
Регулятор PWM 1.5KW вращения двигателя постоянного тока M124.2 Модуль
Доставка из г. Днепр
169.90 грн
Купить
Інтернет-магазин «Електроніка»
Управление скоростью двигателя постоянного тока с регулировкой. ШИМ контроллер 10-55В 60А
Доставка из г. Полтава
632.80 грн
Купить
Интернет-магазин «Налетай»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 4.5-35В 0-5А
Доставка по Украине
по 52.99 грн
от 2 продавцов
52.99 грн
Купить
РезиStore
ШИМ регулятор скорости двигателя постоянного тока 3А с переключателем
На складе
Доставка по Украине
106. 60 грн
60 грн
Купить
Магазин «Солдер»
Контроллер регулятор скорости вращения двигателя постоянного тока 35В, 5А
На складе в г. Николаев
Доставка по Украине
149 грн
Купить
Интернет-магазин Co-Di
ШИМ регулятор оборотов двигателя постоянного тока с пультом 55В, 30А
На складе в г. Николаев
Доставка по Украине
1 674 грн
Купить
Интернет-магазин Co-Di
Регулятор скорости вращения двигателя постоянного тока 60В, 30А с дисплеем
На складе в г. Николаев
Доставка по Украине
585 грн
Купить
Интернет-магазин Co-Di
ШИМ регулятор оборотов двигателя постоянного тока 6-12В 6А
Доставка из г. Днепр
95 — 109.4 грн
от 3 продавцов
107.40 грн
Купить
Інтернет-магазин «Електроніка»
ШИМ контроллер. Управление скоростью двигателя постоянного тока с ЖК и регулировкой 6-30В 0-8А
Доставка из г. Полтава
Полтава
по 304.4 грн
от 2 продавцов
304.40 грн
Купить
USCompany
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 12-30В 10А
Доставка по Украине
по 208.4 грн
от 2 продавцов
208.40 грн
Купить
USCompany
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 12-40В 10А
Доставка из г. Полтава
220.70 грн
Купить
USCompany
Радиоконструктор регулятор PWM 1.5KW вращения двигателя постоянного тока М124.2 Модуль
Заканчивается
Доставка по Украине
215.30 грн
Купить
Radio Store
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 12-40В 10А
Доставка по Украине
219.1 — 220.7 грн
от 3 продавцов
220.70 грн
Купить
РезиStore
ШИМ контроллер. Управление скоростью двигателя постоянного тока с регулировкой 4.5-35В 0-5А
Доставка из г.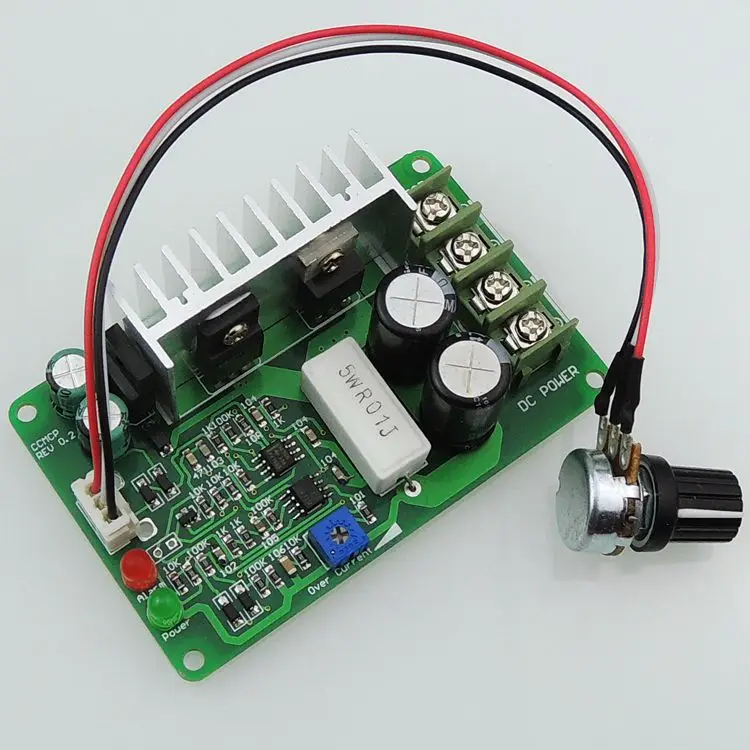 Полтава
Полтава
52.99 грн
Купить
МегаШара — Интернет-магазин
Широтно-импульсное управление двигателем постоянного тока
Цель работы
Практическое изучение принципа регулирования частоты вращения двигателя постоянного тока с помощью широтно-импульсного регулятора. Оценка влияния частоты коммутации и индуктивности якорной цепи двигателя на качество регулирования. Исследование механических характеристик электропривода при действии обратной связи по скорости вращения.
Указания к самостоятельной работе
При
подготовке к лабораторной работе
необходимо по учебникам, конспектам
лекций изучить тему «Электроприводы
постоянного тока с широтно-импульсным
управлением»: устройство, принцип
действия, способы регулирования частоты
вращения, механические и регулировочные
характеристики в разомкнутой и замкнутой
системе регулирования [1,2], а также
лабораторный практикум к выполнению
лабораторной работы 5.
Принцип действия, характеристики системы широтно-импульный преобразователь двигатель постоянного тока и описание лабораторного стенда
3.1 Принцип действия, характеристики системы ШИП-ДПТ
Принцип широтно-импульсного управления двигателя постоянного тока поясняет рис. 3.1. На схеме штриховой линией очерчен электронный ключ VS, который периодически подключает цепь якоря двигателя М на выход неуправляемого выпрямителя V с напряжением ud. На отрезке времени tо, когда ключ VS замкнут, ток iя якоря двигателя создается напряжением Ud. При этом часть энергии, поставляемой выпрямителем V, запасается в якоре двигателя М в виде магнитного поля.
На
отрезке времени tз,
когда ключ VS разомкнут, ток iя
якоря двигателя М протекает в прежнем
направлении, но через шунтирующий диод
VD, используя для этого энергию
электромагнитного поля индуктивностей
якорной цепи двигателя М.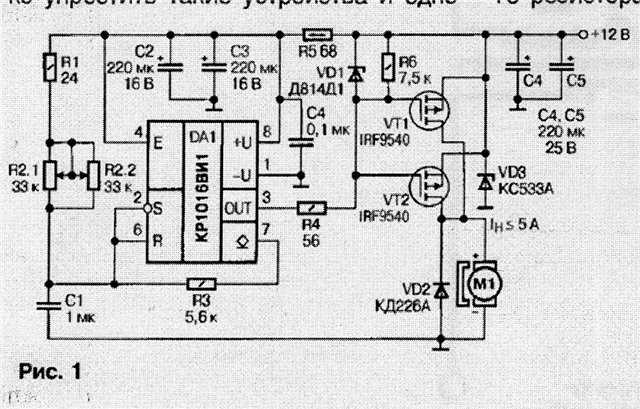
Рис 3.1. Схема (а) и диаграмма (б) напряжений и тока при широтно-импульсном управлении
Среднее значение напряжения uя на якоре двигателя М за период TК коммутации VS ключа определяется по формуле
|
(3.1) |
где скважность импульсов; напряжение на выходе выпрямителяV.
Таким образом, напряжение Uя определяется путем изменения скважности импульсов. Для изменения скважности импульсов применяется широтно-импульсный модулятор ШИМ (рис. 3.1,a).
ШИМ
состоит из генератора опорного напряжения
(ГОН), нуль-органа сравнения (НО) и
формирователя выходных импульсов (ФИ).
Генератор ГОН вырабатывает треугольное
напряжение u0
c частотой fк=1/Tк,
которое сравнивается в НО с управляющим
напряжением uу.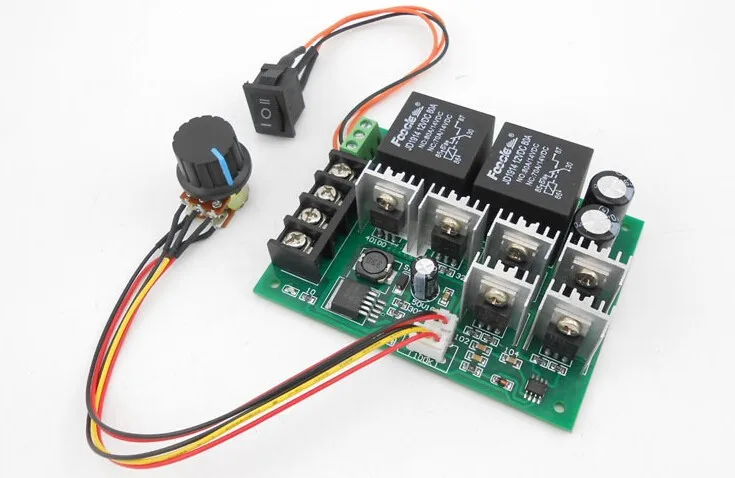 В момент равенства этих напряжений и
при условии, что Uу
> u0,
ФИ вырабатывает импульсы, включающие
VS. При импульсном управлении ток в якоре
двигателя М имеет колебательный характер.
При этом пульсации составляют (2-10)% от
номинального значения тока якоря.
Величина пульсаций I
якорного тока определяется выражением
В момент равенства этих напряжений и
при условии, что Uу
> u0,
ФИ вырабатывает импульсы, включающие
VS. При импульсном управлении ток в якоре
двигателя М имеет колебательный характер.
При этом пульсации составляют (2-10)% от
номинального значения тока якоря.
Величина пульсаций I
якорного тока определяется выражением
|
(3.2) |
где rя, Lя — соответственно активное сопротивление и индуктивность якорной цепи двигателя М; — электромагнитная постоянная времени якорной цепи двигателя.
Из
уравнения (3.2) видно, что величина
пульсаций якорного тока обратно
пропорциональна частоте коммутации fк
и электромагнитной постоянной Тэ
, а также зависит от величины скважности
импульсов. Наибольшие пульсации якорного
тока возникают при =0,5.
Для уменьшения пульсаций тока целесообразно
увеличивать частоту коммутации ключа.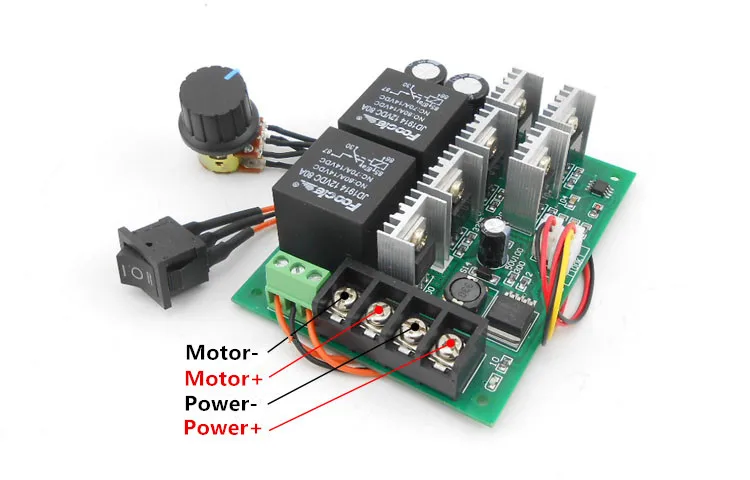 В преобразователях с тиристорными
ключами частота коммутации выбирается
в пределах 200 — 2000 Гц, в преобразователях
на транзисторах — в пределах 2 — 40 кГц.
В преобразователях с тиристорными
ключами частота коммутации выбирается
в пределах 200 — 2000 Гц, в преобразователях
на транзисторах — в пределах 2 — 40 кГц.
Для обеспечения тормозных режимов при регулировании скорости вращения и сбросе нагрузки используется схема с двумя силовыми ключами (рис.3.2,а). Если в схеме работают ключ VS1 и диод VD1, то имеет место двигательный режим работы электропривода (сплошные стрелки). При этом энергия на движение вала потребляется из сети постоянного тока. При работе ключа VS2 и диода VD2 электропривод переводится в тормозной режим (штриховые стрелки) с рекуперацией энергии движения вала в сеть. Диаграмма тока iя якоря и тока iс питающей сети соответственно для двигательного и тормозного режимов изображены на рис. 3.2, б и в. Диаграмма токов показывает, что ток iс сети носит импульсный характер с изменением направления при тормозном режиме.
Для
повышения эффективности торможения,
особенно при низких скоростях вращения
вала, необходимо увеличить время
замыкания ключа VS2
и иметь в цепи якоря достаточную суммарную
индуктивность.![]()
Рис. 3.2. Схема (а), диаграмма (б и в) работы и механические характеристики электропривода с широтно-импульсным управлением
Механические характеристики электропривода с широтно-импульсным управлением для двухквадрантного режима работы представлены на рис 3.2,г. Характеристики не имеют области прерывистых токов, и их жесткость определяется активным сопротивлением якоря двигателя М. Уравнение механических характеристик может быть записано в виде:
(3.3)
где — скорость вращения холостого хода;- постоянная двигателя М;- ток короткого замыкания цепи якоря.
В
импульсных преобразователях в качестве
электронных ключей применяются силовые
транзисторы и транзисторные модули,
которые должны надежно работать в
широких пределах входного напряжения
и тока нагрузки, иметь высокую перегрузочную
способность и обеспечивать требуемую
частоту fк
коммутации.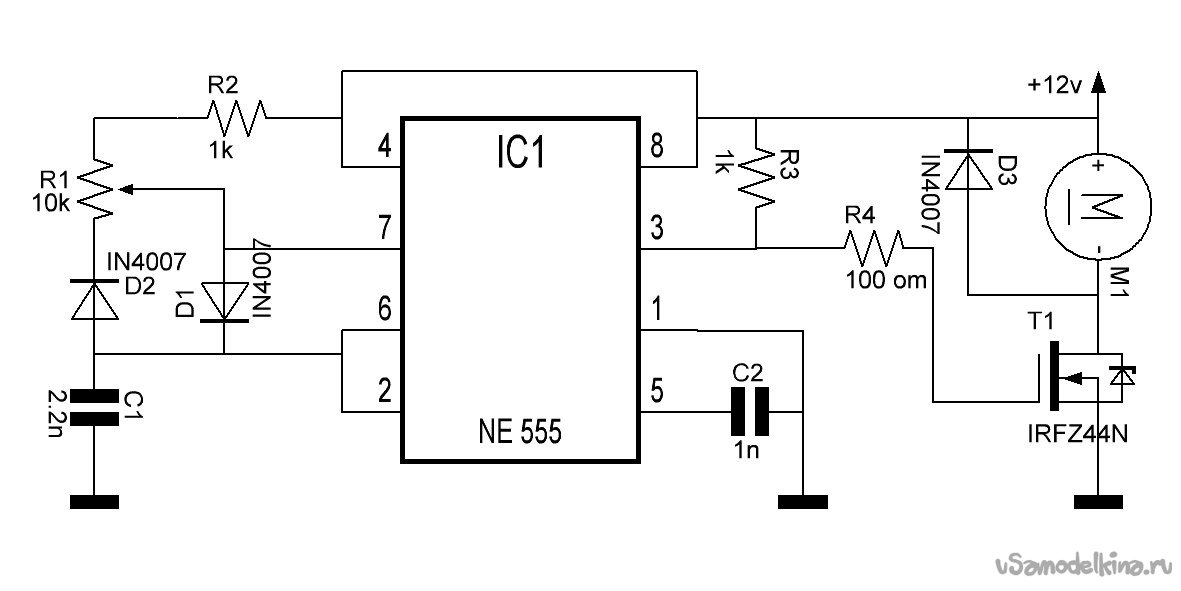
характеристики, фото и отзывы покупателей
216.39 ₽Перейти в магазинТовар больше не продаётся, посмотрите похожие
Ссылка скопирована, поделитесь ею
Или отправьте через соцсети
Данный товар больше не продаётся, но есть аналогичные и похожие
Цена выросла на 28.99 ₽
Дороже средней, значительноПродавец надежный – 89%
Выше среднего, можно покупать, ZQC Module Store
- На площадке более 5 лет
- Высокий общий рейтинг (282066)
- Покупатели довольны общением
- Товары соответствуют описанию
- Быстро отправляет товары
- 2.3% покупателей остались недовольны за последние 3 месяца
Отзывы покупателей
отслеживалась на всём пути, упаковано в пупырчатый пакет. доставлено быстро.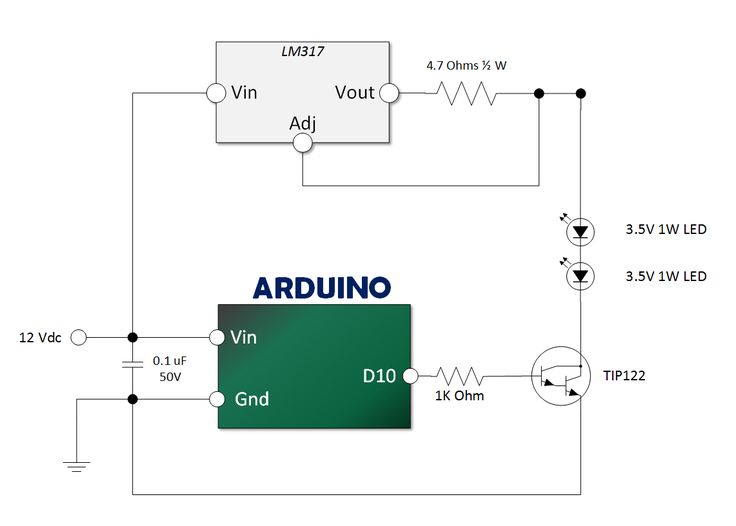 работает отлично.
маленькая неприятность отломан один уголок, второй погнут, спасибо почте.
продавца рекомендую.
работает отлично.
маленькая неприятность отломан один уголок, второй погнут, спасибо почте.
продавца рекомендую.
29 апреля 2020
отслеживалась на всём пути, упаковано в пупырчатый пакет. доставлено быстро. работает отлично. маленькая неприятность отломан один уголок, второй погнут, спасибо почте. продавца рекомендую.
29 апреля 2020
Долгая доставка. Этот продукт был это не проблема качества, продавец вернуть первоначальную цену покупки. Хороший продавец.
10 февраля 2020
A
A***v
Доставка: AliExpress Standard Shipping
Работает нормально. На одной не было наклейки куда что подключать, фигня конечно, но тем не менее.
25 февраля 2022
Хороший товар, доставка в KSA в течение 23 дней, окончательная оценка после использования
05 февраля 2020
доставка быстрая немогтполучить с вязи с короновирусом посылкой доволен рекомендую
07 апреля 2020
доставка быстрая немогтполучить с вязи с короновирусом посылкой доволен рекомендую
07 апреля 2020
Шло полтора месяца.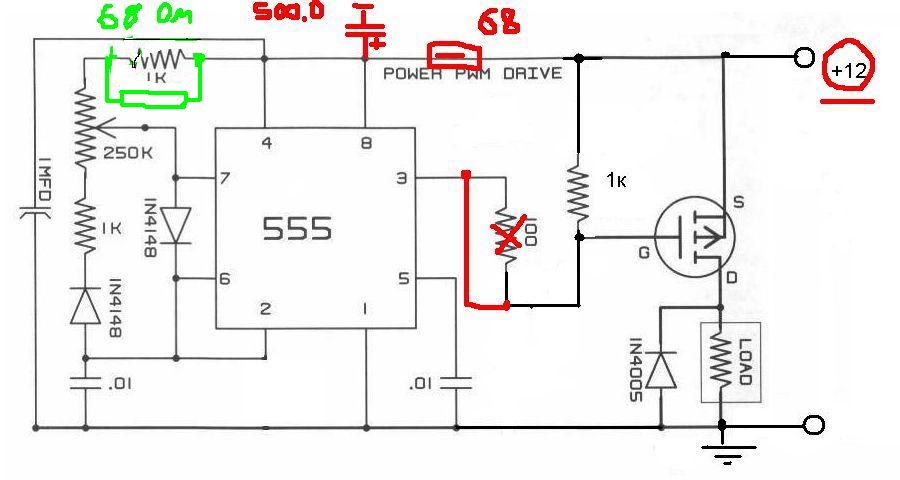 Упакован слабо. В работе ещё не проверял.
Упакован слабо. В работе ещё не проверял.
20 февраля 2020
пришло в работе не проверял думал меньше будет
06 апреля 2020
пришло в работе не проверял думал меньше будет
06 апреля 2020
A
A***n
Быстрая доставка отличный сервис
13 октября 2021
V
V***o
Доставка: Cainiao Standard For Special Goods
Товар соответствует описанию
31 января 2022
Гайка -100 кармы упаковщику
08 мая 2020
Гайка -100 кармы упаковщику
08 мая 2020
Дякую,задоволений.
06 марта 2020
Цены у других продавцов от 161.79 ₽
329.64 ₽
Регулятор скорости двигателя, устройство для управления двигателем, ШИМ, 6-30 в, 12 В, 24 В, макс. 8 А, 16 кГц, цифровой дисплей, управление двигателем постоянного тока, переключатель регулятора CV
1оценка
0заказов
Надежность – 100%
Продавец UG International Supply Store
В магазинПерейти в магазин
198. 86 ₽
86 ₽
Регулятор скорости двигателя, устройство для управления двигателем, ШИМ, 6-30 в, 12 В, 24 В, макс. 8 А, 16 кГц, цифровой дисплей, управление двигателем постоянного тока, переключатель регулятора CV
1оценка
0заказов
Надежность – 89%
Продавец Aideepen ELEC&Lifes Store
В магазинПерейти в магазин
198.86 ₽
Регулятор скорости двигателя, устройство для управления двигателем, ШИМ, 6-30 в, 12 В, 24 В, макс. 8 А, 16 кГц, цифровой дисплей, управление двигателем постоянного тока, переключатель регулятора CV
0оценок
0заказов
Надежность – 100%
Продавец diymore Official Store
В магазинПерейти в магазин
Найдено 31 похожих товаров
-8
%
243.35 ₽
Регулятор скорости электродвигателя постоянного тока, шим, 16 кгц, 6-30 в постоянного тока, 6/8 а, светодиодный дисплей, 6 в, 12 в, 24 в
4
5
Надёжность продавца 83%
-0. 3
3
%
194.82 ₽
Led-регулятор, 6 в, 12 в, 24 в, 8 а, 16 кгц
1
0
Надёжность продавца 68%
-1
%
186.05 ₽
Регулируемый светодиодный двигатель постоянного тока 6 в-30 в макс. 8а с цифровым дисплеем контроллер скорости шим двигатель постоянного тока управление cv регулятор
0
0
Надёжность продавца 100%
-2
%
196.84 ₽
Dc 6v-30v регулируемый шим регулятор скорости двигателя цифровой дисплей dc регулятор управления двигателем 12v 24v 8a макс. 16khz
0
1
Надёжность продавца 100%
-3
%
173. 25 ₽
25 ₽
Dc 6 v-30 v 12v 24v max 8a 16khz регулируемый шим контроллер скорости двигателя цифровой дисплей dc мотор управления cv регулятор переключатель
1
2
Надёжность продавца 100%
204.93 ₽
Dc 6-30v max 8a светодиодный с цифровым дисплеем, регулируемый шим контроллер скорости двигателя постоянного тока, регулятор двигателя cv, модуль переключателя 6v-30v
1
4
Надёжность продавца 89%
Неполные данные
192.12 ₽
Регулятор скорости электродвигателя, регулятор скорости двигателя, 16 кгц, шим, dc 6-30 в, 12 в, 24 в
1
2
Надёжность продавца 0%
-6
%
330.99 ₽
Шим-регулятор, регулируемая скорость, цифровой дисплей, регулятор постоянного тока 9-60 в для регулятора скорости вентилятора 12 в, 24 в, 12 а
1
0
Надёжность продавца 89%
-7
%
184. 03 ₽
03 ₽
Регулятор напряжения, постоянный ток 6-30 в, 12 в, 24 в, 8 а, светодиодный регулируемый шим-контроль скорости двигателя, ler контроль мощности, cv регулятор, модуль переключателя
1
1
Надёжность продавца 72%
Неполные данные
153.70 ₽
С источником питания от постоянного тока, 6v-30v 6a 16 кгц контроллер скорости двигателя постоянного тока светодиодный цифровой дисплей 6 в, 12 в, 24 в постоянного тока, 6a 8a pwm регулятор переменной скорости с оболочкой
1
1
Надёжность продавца 0%
126.06 ₽
Контроллер скорости шим двигателя постоянного тока, 12-30 в, 6 в, 12 в, 24 в, 30 в, 10 а
0
3
Надёжность продавца 89%
103.81 ₽
Шим-регулятор скорости двигателя, 12-40 в постоянного тока, 10 а, регулятор скорости, 24 в, 30 в, 13 кгц
1
2
Надёжность продавца 100%
190. 77 ₽
77 ₽
Модуль управления скоростью двигателя diymore dc 6-30 в 8a pwm, устройство управления двигателем постоянного тока, панель переключателя регулятора cv светодиодный светодиодным цифровым дисплеем
1
1
Надёжность продавца 100%
-4
%
248.75 ₽
Автомобильный регулятор мощности, переключатель управления вентилятором, 12 в, 24 в, 48 в постоянного тока, 2000 вт, 10-50 в, макс. 40 а, контроллер скорости двигателя постоянного тока, шим, hho
6
16
Надёжность продавца 89%
-2
%
86.29 ₽
Контроллер скорости двигателя постоянного тока, 5 а, 90 вт, шим-контроллер скорости двигателя постоянного тока 12 в, регулируемый регулятор скорости 4,5-35 в, переключатель регулятора 24 в
3
8
Надёжность продавца 89%
754. 32 ₽
32 ₽
Шим регулятор двигателя пост. тока 12 в 24 в 60 в 72 в 30 а регулятор скорости модуль управления двигателем
0
1
Надёжность продавца 100%
214.37 ₽
10 а 12 в-60 в 600 вт контроллер скорости двигателя постоянного тока шим регуляция ширины импульса плата светодиодный трубка цифровой переключатель управления двигателем 14 кгц 24 в 48 в
1
1
Надёжность продавца 89%
318.85 ₽
Регулятор двигателя пост. тока-регулятор скорости с цифровым дисплеем ccm5d, 6 в, 12 в, 24 в, 6 а, 8 а, 0 ~ 100%, регулируемый бесступенчатый переключатель скорости
1
5
Надёжность продавца 89%
140.89 ₽
Небольшой контроллер скорости двигателя постоянного тока, регулируемый регулятор скорости, переключатель регулятора, светодиодный диммер постоянного тока, 3-35 в, 12 в, 24 в, шим
1
0
Надёжность продавца 100%
-2
%
Неполные данные
188. 08 ₽
08 ₽
Dc 12 в 24 в 3a 21 кгц pwm регулятор скорости двигателя постоянного тока регулируемый регулятор скорости реверсивный шим релейный модуль 6 в-28 в
0
0
Надёжность продавца 0%
54.60 ₽
Мини-контроллер скорости двигателя постоянного тока, 5 а, 90 вт, шим-контроллер скорости двигателя постоянного тока 12 в, регулируемый регулятор скорости 4,5-35 в, переключатель регулятора 24 в
0
0
Надёжность продавца 100%
-2
%
75.50 ₽
Шим-регулятор скорости двигателя, устройство для управления скоростью генератора постоянного тока 6-28 в, 12 в, 24 в, 3 а, настраиваемый переключатель управления скоростью, инструменты
3
9
Надёжность продавца 100%
-5
%
132. 12 ₽
12 ₽
Двигатель постоянного тока 6-30 в 6a, регулятор скорости двигателя, реверсивный переключатель управления вперед/назад, плата 6 в-30 в 12 в 24 в макс. модуль 10 а
1
1
Надёжность продавца 100%
-3
%
632.31 ₽
Регулятор скорости генератора постоянного тока, устройство управления шим 9-60 в 12 а, цифровой дисплей, максимальный ток 20 а
0
0
Надёжность продавца 100%
781.29 ₽
Регулятор скорости электродвигателя ccm5d, переключатель управления скоростью, 6-30 в постоянного тока, 8 а, светодиодный 6 в, 12 в, 24 в
1
1
Надёжность продавца 53%
668.04 ₽
Цифровой светодиодный дисплей, 30 а, шим, 0 ~ 100%, регулируемый регулятор скорости двигателя постоянного тока 6-60 в, 12 в, 24 в, 48 в, 0-30 а
3
1
Надёжность продавца 100%
-16
%
333. 68 ₽
68 ₽
Регулятор скорости двигателя, устройство для управления прямым и обратным переключателем, линейным приводом, шим, 6 в, 12 в, 24 в постоянного тока
0
0
Надёжность продавца 100%
536.59 ₽
Шим-контроллер скорости двигателя постоянного тока 6-30 в 12 в 24 в 15 а, макс. с цифровым дисплеем l15
1
0
Надёжность продавца 100%
1 039 ₽
Шим-контроллер, 6 в, 12 в, 24 в, регулятор скорости двигателя постоянного тока, цифровой дисплей с ик-пультом дистанционного управления
0
0
Надёжность продавца 72%
301.33 ₽
Регулируемый шим-контроллер скорости двигателя, 9-60 в пост. тока, 12 в, 24 в, 48 в, 12 а, 20 кгц, цифровой дисплей
1
0
Надёжность продавца 100%
409. 18 ₽
18 ₽
Цифровой регулятор скорости ccm5d с широкополосным дисплеем постоянного тока, 6 в, 12 в, 24 в, регулируемый бесступенчатый регулятор скорости
1
0
Надёжность продавца 89%
4оценки
17заказов
Фото от покупателей
+23
Все фото
Характеристики товара
- Brand Name: diymore
- Motor Type: DC Motor
Показать все
Управление щеточными двигателями постоянного тока с помощью ШИМ
Загрузите эту статью в формате PDF.
Многие приложения, использующие миниатюрные коллекторные двигатели постоянного тока, требуют, чтобы двигатели работали более чем в одной точке нагрузки или в определенных циклах нагрузки. Для запуска двигателя в рабочих точках нагрузки требуется переменный, управляемый источник питания. Это можно сделать с помощью непрерывного источника питания с линейной регулировкой или широтно-импульсной модуляции (ШИМ).
Линейное регулирование, как правило, неэффективно и требует большего корпуса. Более того, в приложениях с батарейным питанием нецелесообразно использовать линейное регулирование при различных точках нагрузки. ШИМ-регулирование напряжения, с другой стороны, является эффективным и может эффективно использоваться в приложениях с питанием от батареи или постоянного тока. Более высокая эффективность ШИМ-привода увеличивает срок службы батареи и снижает нагрев электронных компонентов.
Одним из недостатков использования ШИМ с двигателем являются потери на вихревые токи в обмотках ротора из-за непрерывного переключения ШИМ, которые, как правило, отсутствуют в линейных источниках питания. Однако правильно спроектированный ШИМ сводит к минимуму эффекты вихревых токов и улучшает работу двигателей.
Коллекторные двигатели постоянного тока без сердечника имеют низкую инерцию и индуктивность. Это позволяет использовать их в приложениях, требующих динамического поведения и быстрой реакции двигателя. Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно регулировать в двигателях без сердечника.
Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно регулировать в двигателях без сердечника.
В отличие от чисто резистивных нагрузок для двигателей постоянного тока, сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами при оптимизации частоты ШИМ и рабочего цикла.
Линейный и ШИМ-источник питания
В линейном источнике постоянного тока (как показано на рисунке ниже) ток зависит только от сопротивления обмотки. Индуктивность не влияет на ток, как при постоянном источнике. Импеданс катушки индуктивности равен нулю.
Значения по каталогу и прогнозируемый срок службы для большинства двигателей без сердечника оцениваются с использованием постоянного линейного источника питания постоянного тока.
При использовании источника ШИМ схема видит омическое сопротивление и индуктивность из-за частых переключений. Кроме того, на клемме создается противо-ЭДС, эквивалентная характеристикам двигателя (KE) и скорости. Это усложняет схему ШИМ при разработке ее для конкретного приложения, поскольку для достижения наилучших характеристик двигателя необходимо точно контролировать не только рабочий цикл, но и частоту ШИМ.
Кроме того, на клемме создается противо-ЭДС, эквивалентная характеристикам двигателя (KE) и скорости. Это усложняет схему ШИМ при разработке ее для конкретного приложения, поскольку для достижения наилучших характеристик двигателя необходимо точно контролировать не только рабочий цикл, но и частоту ШИМ.
Когда двигатель находится в состоянии покоя или вращается с низкой скоростью, противо-ЭДС можно пренебречь. Упрощенная эквивалентная схема двигателя показана ниже.
Диод свободного хода или демпфирующий диод (параллельно клеммам двигателя на приведенной выше схеме) никогда не следует опускать при использовании переменного напряжения, например, с ШИМ. Диод позволяет рассеивать заряд без образования дуги при переключении.
Когда двигатель работает на умеренно высокой скорости, противо-ЭДС сравнима с приложенным напряжением, поэтому в эквивалентную схему необходимо добавить составляющую, представляющую противо-ЭДС. Модифицированная эквивалентная схема показана ниже.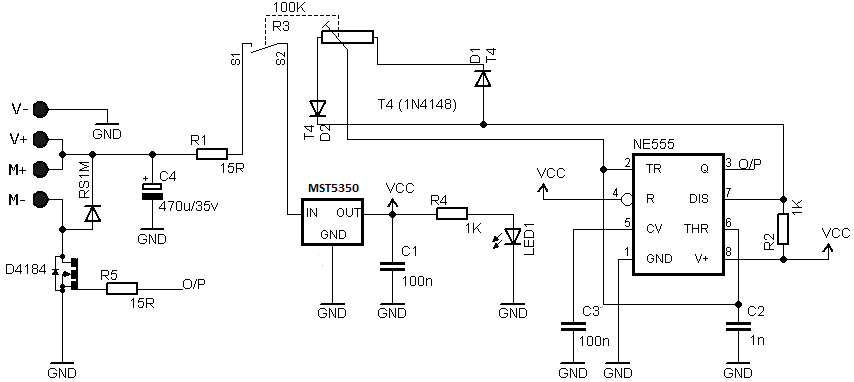
Обратная ЭДС вместе с цепью RL в щеточном двигателе постоянного тока вносит нелинейность в управление ШИМ, а частота ШИМ и рабочий цикл ШИМ становятся важными для получения наилучшей выходной мощности.
Когда ШИМ управляет двигателем и электромагнитная совместимость имеет решающее значение, рекомендуется анализировать эффекты излучения, поскольку излучаемая электромагнитная энергия обычно выше с ШИМ, чем с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, дроссель противодействует току в цепи. В результате ток экспоненциально возрастает до установившегося значения, которое зависит от отношения двигателя L/R . На приведенном ниже графике показано экспоненциальное увеличение тока через обмотку в цепи RL. Когда приложенное напряжение снимается с цепи, ток медленно падает до нуля, затухая по экспоненциальному закону.
Константа L/R (она же постоянная времени для RL-цепи) определяет максимальную скорость изменения приложенного напряжения в цепи.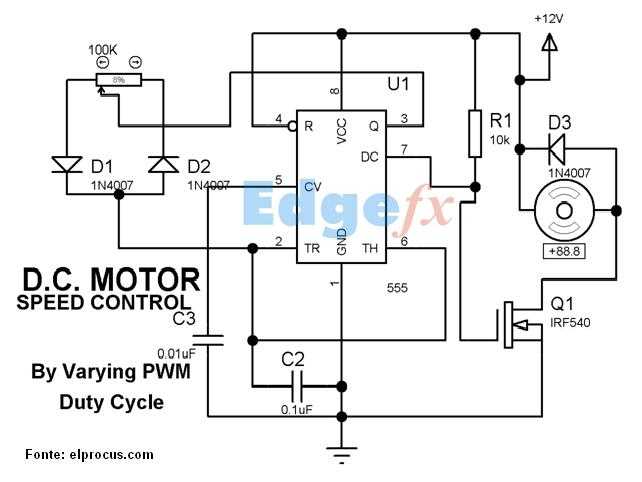 Стационарное состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (выше) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L/R ) обычно считается временем, необходимым для достижения устойчивого состояния. Однако при пятикратной постоянной времени схема находится на уровне около 99,33% от его максимального значения.
Стационарное состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (выше) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L/R ) обычно считается временем, необходимым для достижения устойчивого состояния. Однако при пятикратной постоянной времени схема находится на уровне около 99,33% от его максимального значения.
Пренебрегая противо-ЭДС для простоты, нарастание тока в простой RL-цепи можно представить как:
Где
I 0 — максимальный ток через RL-цепь при заданном напряжении; τ — постоянная времени цепи RL, определяемая как время, необходимое для достижения током значения 1/e, или около 63,21 % от максимального тока; а т это время.
После достижения устойчивого состояния, если источник питания отключен, ток через цепь RL спадает экспоненциально (как показано ниже).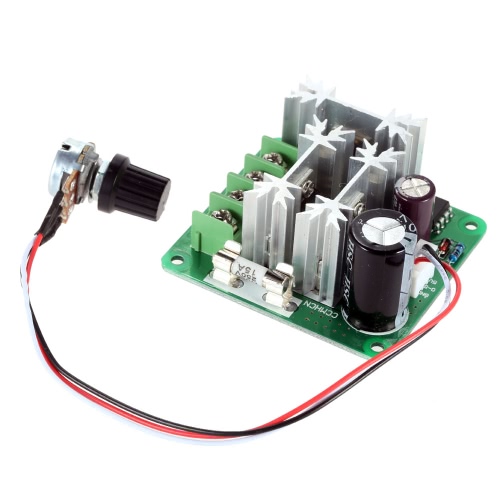
Рекомендации по проектированию ШИМ
Когда привод ШИМ используется с щеточными двигателями постоянного тока, внутренняя индуктивность ротора действует как фильтр тока, что хорошо для схемы привода. Однако другие конструктивные параметры, такие как частота ШИМ и рабочий цикл, влияют на пульсации тока и, следовательно, на срок службы щеточной коммутации.
Когда ШИМ управляет двигателем, ток через двигатель увеличивается и падает с каждым периодом ШИМ. Игнорируя противо-ЭДС двигателя, нарастание тока является функцией индуктивности двигателя и общего сопротивления. Для каждого цикла ШИМ частота ШИМ должна быть выбрана таким образом, чтобы было достаточно времени, чтобы ток достиг своего установившегося значения, которое обычно превышает 5τ. На приведенном ниже графике показаны условия, когда частота ШИМ достаточна для достижения устойчивого состояния.
Когда частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится короче, чем время, необходимое для работы цепи RL и достижения установившегося состояния тока. Следовательно, ток колеблется между двумя неустановившимися значениями, что вызывает пульсации тока. На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
Следовательно, ток колеблется между двумя неустановившимися значениями, что вызывает пульсации тока. На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
С точки зрения конструкции пульсации тока должны быть уменьшены путем регулировки частоты возбуждения таким образом, чтобы выходной крутящий момент был почти линейным. Также рекомендуется поддерживать частоту ШИМ выше диапазона слышимости человека (выше 20 кГц), поскольку пульсации тока в этом диапазоне частот могут создавать шум во время работы двигателя.
Пульсация тока
Для определенных щеточных двигателей без сердечника пульсации тока должны быть как можно ниже. Как правило, пульсация ниже 10% считается низким значением. Более высокие пульсации влияют на производительность несколькими способами: Выходной крутящий момент двигателя пропорционален току, тогда как омический (резистивный) нагрев обмотки пропорционален квадрату тока. Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В щеточных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не оказывает существенного влияния на работу двигателя.
Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В щеточных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не оказывает существенного влияния на работу двигателя.![]()
Индуктивное напряжение на клемме может быть указано как:
Где L — индуктивность; U L — напряжение, генерируемое на катушке индуктивности; а T — бесконечно малое время, за которое ток изменяется на ∆I.
При работе двигателя с ШИМ напряжение на его клемме противодействует противо-ЭДС, генерируемой на клемме двигателя. Следовательно, уравнение 3 можно переписать как для нарастания, так и для падения тока в операциях ШИМ как:
и:
Где нижний индекс ON обозначает время «включения», а OFF обозначает время «выключения» импульса ШИМ, так что общее время Т P дается как:
Из уравнения. 5,
Вставка значения из уравнения. 7 в уравнение 4, мы получаем
T ON и T OFF в приведенном выше уравнении можно дать как
и
Где D — рабочий цикл ШИМ-сигнала.
Отсюда уравнение 8 можно переписать как:
Ур. 11 можно использовать для извлечения пульсаций тока в двигателе из-за ШИМ-сигнала с рабочим циклом D и частотой 1/T P .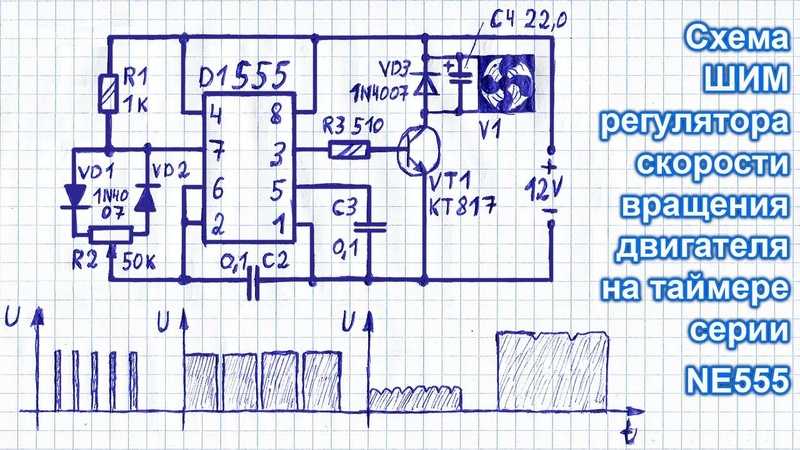
Интересно отметить из уравнения. 11 видно, что пульсации тока максимальны, когда рабочий цикл составляет 50%. Следовательно, предлагается, чтобы проектировщики запускали двигатель вдали от зоны рабочего цикла 50%.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от электрической постоянной времени двигателя.
В идеале для двигателей без сердечника разница (U ON – U OFF ), иногда обозначаемая как ∆U, должна быть как можно меньше в зависимости от максимального входного напряжения двигателя и скорости применения.
Индуктивность двигателя на клеммах зависит от частоты ШИМ. Например, в каталоге указана индуктивность двигателя Portescap при частоте 1 кГц; но на частоте 100 кГц индуктивность может уменьшиться до 20% от каталожного значения.
По сравнению с двигателями с железным сердечником индуктивность двигателей без сердечника ниже в два раза. Кроме того, добротность хуже, так как в обмотках ротора отсутствуют железные пластины.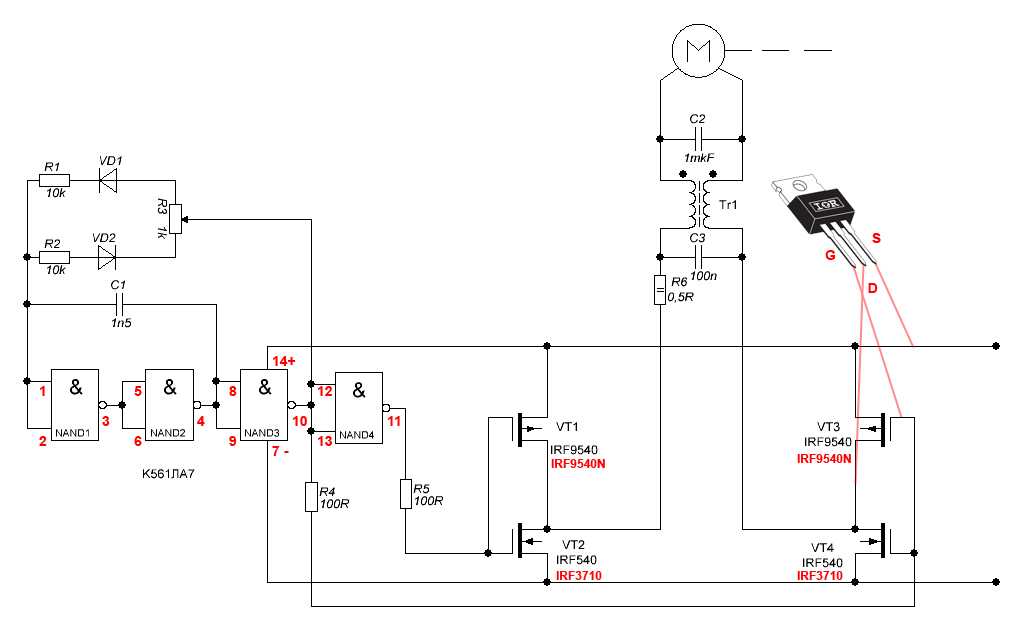 Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Срок службы двигателя
В коллекторных двигателях постоянного тока наиболее распространенным видом отказа является износ щеток из-за коммутации. В течение срока службы двигателя щетки (угольно-графитовые или из драгоценных металлов) подпружиниваются и механически соединяются с сегментами коллектора для зарядки катушек. Это делает износ щеток функцией механического трения, возникающего при скольжении щеток по сегментам коллектора, и электроэрозии, вызванной электрическими разрядами во время коммутации.
При использовании приводов ШИМ для работы двигателя с различными скоростями и нагрузками расчетный срок службы двигателя представляет собой сложную комбинацию различных факторов, влияющих на его износостойкость. Эти факторы могут включать: Более высокую плотность тока в коммутации из-за пониженного КПД, высокого механического трения, недостаточной смазки или рециркуляции тока. Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
В зависимости от области применения и источника питания двигателя его ожидаемый срок службы может зависеть от одного или нескольких факторов, описанных выше.
Для конструкций двигателей, в которых точка нагрузки требует, чтобы двигатель работал с умеренными крутящим моментом и скоростью, без осевых и радиальных нагрузок, действующих на вал, и в умеренном диапазоне температур (обычно ниже 60 °C), износ, как правило, обусловлен электромеханическими нагрузками. -эрозия. Тогда ресурс двигателя обратно пропорционален индуктивности и квадрату тока:
В приведенном выше уравнении рассматривается линейный источник или источник ШИМ с пульсациями тока, которые пренебрежимо малы по сравнению со средним током, протекающим через двигатель. В практических сценариях пульсация может значительно сократить срок службы двигателя.
Случай 1: Пульсации тока менее 10 %. Чтобы уменьшить пульсации тока до уровня менее 10 % в коллекторных двигателях постоянного тока Portescap, диапазон частот может достигать 40–120 кГц.
С ШИМ, экв. 12 можно переписать так:
л потерь — потери в диоде и потери на вихревые токи и гистерезис на трубке двигателя. Эти потери снижают общий КПД двигателя. Тем не менее, хорошая конструкция обеспечивает КПД ШИМ от 85 до 90%.
Из уравнения. 12 и 13, и с учетом l потерь как 10% от I двигателя .
Тогда:
Следовательно, при эффективности ШИМ 90 %
Случай 2: Пульсации тока значительны. Уравнение 14 остается верным, когда я потери низки по сравнению с двигателем I . Но когда пульсация тока высока, мгновенный ток проходит через двигатель и нагревает его; тогда уравнение следует изменить, чтобы оно стало следующим:
Учитывая ШИМ с рабочим циклом 50%, где пульсации максимальны, а средняя мощность двигателя равна P, интегральная часть может быть переписана как:
Таким образом, уравнение. 16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
ШИМ увеличивает срок службы двигателя
Есть несколько вещей, которые можно сделать для увеличения срока службы двигателя при использовании ШИМ:
1. Уменьшите пульсации тока двигателя. Пульсации тока можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно выше, чем постоянная времени двигателя (L/R), пульсации еще больше уменьшаются. Для двигателей без сердечника Portescap рекомендуется пульсация менее 10 % для увеличения срока службы двигателя.
Другой интуитивный подход к уменьшению пульсаций тока заключается в добавлении внешней индуктивности в цепь двигателя, которая действует как токовый фильтр. Обычно это повышает эффективность. Однако индуктор усугубляет общую электроэрозию системы щетка-коллектор, поскольку электроэрозия прямо пропорциональна индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются проблемой, этот подход не рекомендуется.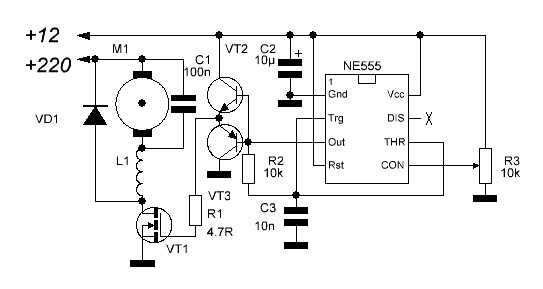
2. Конструкция преобразователя постоянного тока. В конструкциях, подобных приведенной ниже, эффективность системы резко повышается, а срок службы щеток двигателя увеличивается по сравнению с решением, в котором в цепь добавляется внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные ур. 18, следует свести к минимуму. Значение менее 10 % достаточно для практической работы двигателя.
Из приведенного ниже уравнения следует, что на более высоких частотах значение катушки индуктивности и конденсатора будет уменьшаться, и, следовательно, общая упаковка привода ШИМ уменьшится.
Ультразвуковые колебания могут возникать в роторе при работе двигателя на более низких частотах. Поэтому предлагается управлять двигателем на частотах выше 20 кГц.
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет цикл заряда батарей. Привод PWM помогает, позволяя двигателю работать на разных скоростях. Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Sunil Kedia is m Менеджер по дизайну и разработке в Portescap.
Широтно-импульсная модуляция | Приводы двигателей постоянного тока
Широтно-импульсная модуляция (ШИМ) использует цифровые сигналы для управления силовыми приложениями, а также ее довольно легко преобразовать обратно в аналоговую с минимумом оборудования.
Аналоговые системы, такие как линейные источники питания, имеют тенденцию выделять много тепла, поскольку они в основном представляют собой переменные резисторы, несущие большой ток. Цифровые системы обычно не выделяют столько тепла. Почти все тепло, выделяемое коммутационным устройством, приходится на переход (что делается быстро), при этом устройство ни включено, ни выключено, а находится в промежутке. Это потому, что мощность подчиняется следующей формуле:
P = E I, или Вт = Напряжение X Ток
Если либо напряжение, либо ток близки к нулю, то и мощность будет близка к нулю.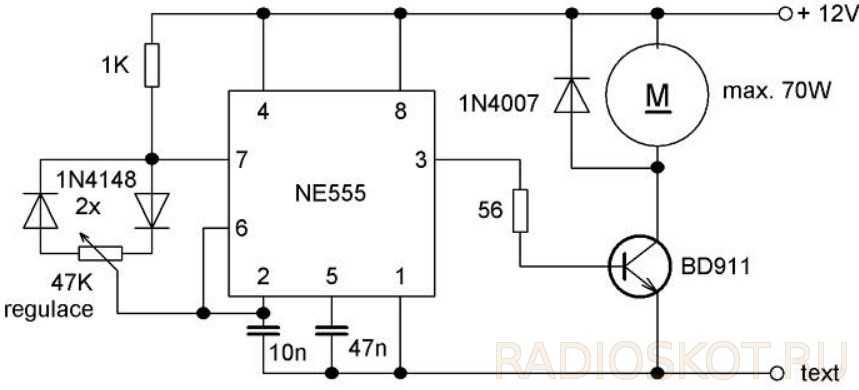 ШИМ в полной мере использует этот факт.
ШИМ в полной мере использует этот факт.
ШИМ может иметь многие характеристики аналоговой системы управления, в том смысле, что цифровой сигнал может быть свободным. ШИМ не должен захватывать данные, хотя есть исключения для контроллеров более высокого класса.
Рабочий цикл
Одним из параметров любой прямоугольной волны является рабочий цикл. Большинство прямоугольных волн составляют 50%, это норма при их обсуждении, но они не обязательно должны быть симметричными. Время включения может полностью варьироваться между выключенным сигналом и полным включением, от 0% до 100% и во всех диапазонах между ними.
Ниже показаны примеры рабочего цикла 10%, 50% и 90%. Хотя частота одинакова для всех, это не является обязательным требованием.
Причина популярности ШИМ проста. Многие нагрузки, такие как резисторы, интегрируют мощность в число, соответствующее проценту. Преобразование в его аналоговое эквивалентное значение является простым. Светодиоды очень нелинейны в своей реакции на ток, дают светодиоду половину его номинального тока, и вы все равно получаете более половины света, который может производить светодиод. С ШИМ уровень света, создаваемый светодиодом, очень линейный. Двигатели, о которых будет рассказано позже, также очень чувствительны к ШИМ.
С ШИМ уровень света, создаваемый светодиодом, очень линейный. Двигатели, о которых будет рассказано позже, также очень чувствительны к ШИМ.
Одним из нескольких способов создания ШИМ является использование пилообразного сигнала и компаратора. Как показано ниже, пилообразная (или треугольная) волна не обязательно должна быть симметричной, но важна линейность формы волны. Частота пилообразного сигнала является частотой дискретизации сигнала.
Если нет никаких вычислений, ШИМ может быть быстрым. Ограничивающим фактором является частотная характеристика компараторов. Это может не быть проблемой, так как многие из применений имеют довольно низкую скорость. Некоторые микроконтроллеры имеют встроенный ШИМ и могут записывать или создавать сигналы по запросу.
Применение ШИМ широко варьируется. Это сердце аудиоусилителей класса D, увеличивая напряжение, вы увеличиваете максимальную выходную мощность, а выбирая частоту за пределами человеческого слуха (обычно 44 кГц), можно использовать ШИМ. Динамики не реагируют на высокие частоты, а дублируют низкие частоты, являющиеся звуковым сигналом. Более высокие частоты дискретизации могут использоваться для еще большей точности, а частота 100 кГц и выше не является чем-то необычным.
Динамики не реагируют на высокие частоты, а дублируют низкие частоты, являющиеся звуковым сигналом. Более высокие частоты дискретизации могут использоваться для еще большей точности, а частота 100 кГц и выше не является чем-то необычным.
Еще одним популярным приложением является управление скоростью двигателя. Двигатели как класс требуют очень больших токов для работы. Возможность изменять их скорость с помощью ШИМ значительно увеличивает эффективность всей системы. ШИМ более эффективен для управления скоростью двигателя при низких оборотах, чем линейные методы.
H-Bridges
PWM часто используется в сочетании с H-Bridge. Эта конфигурация названа так потому, что напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать с обеих сторон нагрузки. В случае индуктивных нагрузок, таких как двигатели, диоды используются для подавления индуктивных пиков, которые могут повредить транзисторы. Индуктивность двигателя также имеет тенденцию подавлять высокочастотную составляющую сигнала. Эта конфигурация также может использоваться с динамиками для аудиоусилителей класса D.
Эта конфигурация также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на то, что эта схема H-моста в целом точна, у нее есть один серьезный недостаток: при переключении между полевыми МОП-транзисторами оба транзистора сверху и снизу будут включены одновременно и примут на себя всю нагрузку, которую может дать блок питания. предоставлять. Это условие называется прорывом через и может произойти с любым типом транзистора, используемого в H-мосте. Если блок питания достаточно мощный, транзисторы не выживут. Это решается с помощью драйверов перед транзисторами, которые позволяют одному выключиться, прежде чем включить другой.
Импульсные источники питания
Импульсные источники питания (SMPS) также могут использовать ШИМ, хотя существуют и другие методы. Добавление топологий, использующих накопленную мощность как в катушках индуктивности, так и в конденсаторах, после основных коммутационных компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышающую 90%.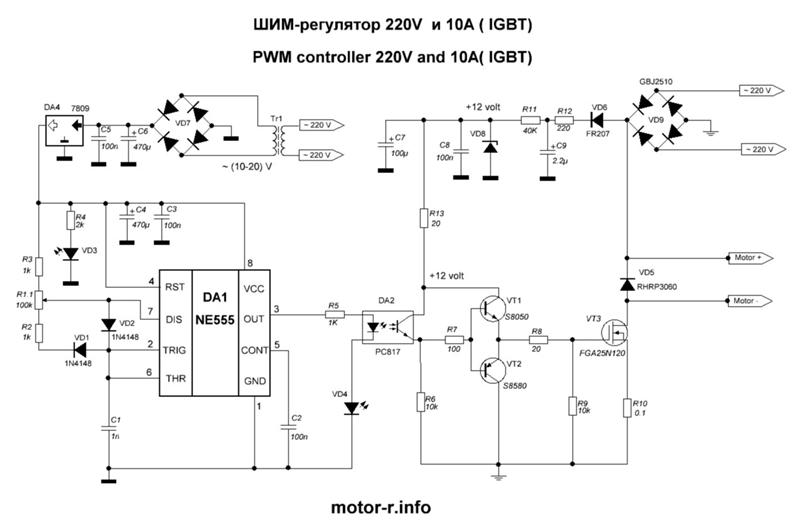 Ниже приведен пример такой конфигурации.
Ниже приведен пример такой конфигурации.
КПД в данном случае измеряется в мощности. Если у вас есть SMPS с 9КПД 0%, и он преобразует 12 В постоянного тока в 5 В постоянного тока при 10 А, сторона 12 В будет потреблять примерно 4,6 А. Неучтенные 10% (5 Вт) будут отображаться как отработанное тепло. Несмотря на то, что этот тип регулятора немного шумнее, он будет работать намного медленнее, чем его линейный аналог.
СВЯЗАННЫЕ РАБОЧИЕ ТАБЛИЦЫ:
- Дизайн-проект: Генератор сигналов с широтно-импульсной модуляцией (ШИМ) Рабочий лист
-
Рабочий лист модуляции сигнала
Что такое ШИМ-управление двигателем — 4QD
Что такое широтно-импульсная модуляция? как работает ШИМ-управление двигателем и как выглядит схема ШИМ? На этой странице мы подробно рассмотрим теорию и практику ШИМ-управления двигателем.
Принципы
Для управления скоростью постоянного тока. двигатель нам нужен переменного напряжения постоянного тока. источник питания. Однако, если вы возьмете 12-вольтовый двигатель и включите на него питание, двигатель начнет ускоряться: двигатели не реагируют сразу, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание за некоторое время до того, как двигатель достигнет полной скорости, двигатель начнет замедляться. Если мы будем включать и выключать питание достаточно быстро, двигатель будет работать на некоторой скорости между нулевой и полной скоростью. Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
источник питания. Однако, если вы возьмете 12-вольтовый двигатель и включите на него питание, двигатель начнет ускоряться: двигатели не реагируют сразу, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание за некоторое время до того, как двигатель достигнет полной скорости, двигатель начнет замедляться. Если мы будем включать и выключать питание достаточно быстро, двигатель будет работать на некоторой скорости между нулевой и полной скоростью. Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
 В B переключатель включен на 50% и выключен на 50%. В точке С двигатель работает большую часть времени и отключается только на короткое время, поэтому скорость близка к максимальной. В практическом низковольтном контроллере переключатель открывается и закрывается на частоте 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышен. Он также достаточно медленный, чтобы МОП-транзисторы могли легко переключаться на этой частоте. Однако двигатель имеет индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток протекает через переключатель MOSFET, когда он включен, но куда он будет течь, когда MOSFET выключается? Читайте дальше и узнайте! Схема управления двигателем ШИМ
В B переключатель включен на 50% и выключен на 50%. В точке С двигатель работает большую часть времени и отключается только на короткое время, поэтому скорость близка к максимальной. В практическом низковольтном контроллере переключатель открывается и закрывается на частоте 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышен. Он также достаточно медленный, чтобы МОП-транзисторы могли легко переключаться на этой частоте. Однако двигатель имеет индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток протекает через переключатель MOSFET, когда он включен, но куда он будет течь, когда MOSFET выключается? Читайте дальше и узнайте! Схема управления двигателем ШИМ Рассмотрим приведенную выше схему: на ней показаны приводной полевой МОП-транзистор и двигатель.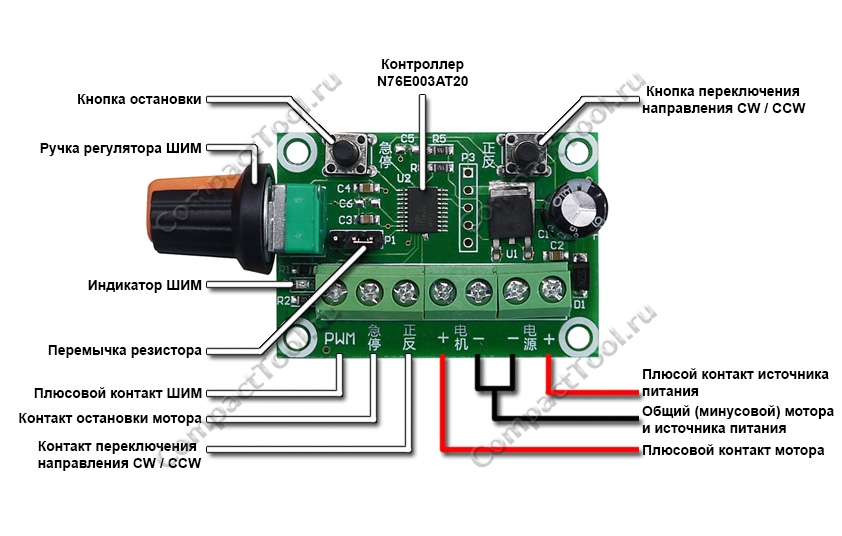 Когда приводной МОП-транзистор проводит ток, ток течет от плюса батареи через двигатель и МОП-транзистор (стрелка A) и обратно к минусу батареи. Когда MOSFET отключается, ток двигателя продолжает течь из-за индуктивности двигателя. К двигателю подключен второй полевой МОП-транзистор: МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (замкнуть его затвор на исток) или использовать силовой диод. Однако не так общеизвестный факт о полевых МОП-транзисторах заключается в том, что когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор сопротивляется току в любом направлении, и проводящий мощный МОП-транзистор фактически падает меньше напряжения, чем диод с прямым смещением, поэтому МОП-транзистор требует меньшего отвода тепла и тратит меньше энергии батареи.
Когда приводной МОП-транзистор проводит ток, ток течет от плюса батареи через двигатель и МОП-транзистор (стрелка A) и обратно к минусу батареи. Когда MOSFET отключается, ток двигателя продолжает течь из-за индуктивности двигателя. К двигателю подключен второй полевой МОП-транзистор: МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (замкнуть его затвор на исток) или использовать силовой диод. Однако не так общеизвестный факт о полевых МОП-транзисторах заключается в том, что когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор сопротивляется току в любом направлении, и проводящий мощный МОП-транзистор фактически падает меньше напряжения, чем диод с прямым смещением, поэтому МОП-транзистор требует меньшего отвода тепла и тратит меньше энергии батареи.
Из приведенного выше следует, что если приводной полевой МОП-транзистор включен в течение 50% рабочего цикла, напряжение двигателя составляет 50% от напряжения батареи, и, поскольку ток батареи протекает только при включенном МОП-транзисторе, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет всего 50% от тока двигателя!
Главный конденсатор
Однако есть проблема: когда МОП-транзистор отключается, он не только прерывает ток двигателя, но и ток, протекающий от батареи. Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этого всплеска. Когда приводной МОП-транзистор снова включается, ток батареи просят быстро течь, чего он не может. Основной конденсатор подает ток в течение периода восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! Во время ранней разработки мы однажды использовали стандартные конденсаторы с проволочными наконечниками и расплавили провода конденсатора! Конденсаторы имеют медное покрытие 9Провода из стали 0251 , а в системах управления двигателями эти провода могут сильно нагреваться!
Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этого всплеска. Когда приводной МОП-транзистор снова включается, ток батареи просят быстро течь, чего он не может. Основной конденсатор подает ток в течение периода восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! Во время ранней разработки мы однажды использовали стандартные конденсаторы с проволочными наконечниками и расплавили провода конденсатора! Конденсаторы имеют медное покрытие 9Провода из стали 0251 , а в системах управления двигателями эти провода могут сильно нагреваться!
Из вышеизложенного видно, что работа этого конденсатора сильно зависит от индуктивности контура проводов батареи. Длинные провода будут иметь большую индуктивность. Скручивание проводов батареи снижает их индуктивность.
Длинные провода будут иметь большую индуктивность. Скручивание проводов батареи снижает их индуктивность.
Сопротивление в выводах батареи будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят поставить амперметр на выводы аккумулятора. Следует сопротивляться искушению: в частности, простые автомобильные амперметры обладают высокой индуктивностью.
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно обходятся без дорогостоящего главного конденсатора и полагаются на емкость аккумулятора. Вам это может сойти с рук — наши ранние Eagle и Egret являются такими контроллерами. Однако необходимо краткое объяснение эффектов. Чтобы проиллюстрировать это, график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Масса прицела находится на отрицательной шине.
Сверху — вид положительного полюса батареи с точки зрения прицела, снизу — отрицательная клемма двигателя (которая переключается контроллером). Для наглядности формы сигнала были сильно подчищены: на практике на сигнале много «грязного» звона. Показан источник питания 12В.
Для наглядности формы сигнала были сильно подчищены: на практике на сигнале много «грязного» звона. Показан источник питания 12В.
Мы соединяем форму волны в точке, где нет тока батареи: выходная мощность двигателя высока, а ток рециркулирует в маховике. В точке A включается полевой МОП-транзистор контроллера, отводя ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому выводы батареи падают на полные 12 В, а напряжение контроллера гаснет до тех пор, пока индуктивность выводов не сможет зарядиться, что и происходит в точке B. Время AB зависит от тока и индуктивности контура батареи и может быть значительную часть времени цикла!
Затем в точке C нижний MOSFET резко отключается, прерывая ток. Ток двигателя не проблема, он продолжает течь, а маховик должен убедиться, что это так! Но резко остановить ток батареи нельзя — поэтому он возражает в виде большого всплеска напряжения. Этот всплеск нарастает до тех пор, пока что-то не дает: в этом случае он достигает напряжения лавинного пробоя MOSFET, и MOSFET его зажимает.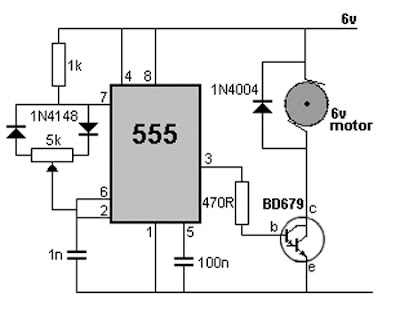 Вы можете легко увидеть напряжение фиксации с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1/2Li², хранящаяся в индуктивности контура батареи, значительно ниже безопасной повторяемой энергии лавины.
Вы можете легко увидеть напряжение фиксации с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1/2Li², хранящаяся в индуктивности контура батареи, значительно ниже безопасной повторяемой энергии лавины.
Проблема: рассчитать индуктивность контура батареи практически невозможно даже для инженера. Для игрока сделать это — ну, сложно. Таким образом, производитель просто поставляет контроллеры известному набору клиентов, которые используют их стандартными способами, и решает проблемы по мере их возникновения на эмпирической основе. Это всегда вопрос нетехнического заказчика, пытающегося получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большинство (но не все) перебоев питания сглаживаются конденсатором. Тем не менее, вы увидите положительное превышение и звон, поскольку ток батареи прерывается.
ШИМ и нагрев двигателя
Популярная «бабушкина сказка» состоит в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый постоянный ток. Как и большинство бабьих сказок, это происходит от частичной правды, взращенной непониманием. «Миф» возникает потому, что если частота равна слишком низкий , ток является прерывистым (или, по крайней мере, переменным в ШИМ-сигнале), потому что индуктивность двигателя не может должным образом поддерживать ток в течение периода выключения сигнала. Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «форм-фактор» тока будет больше единицы. Чем ниже частота, тем выше ток пульсаций и больше нагрев.
Итак, рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток течет, скажем, в течение 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, заданному 1 ампером, то вам явно нужен средний ток 1 ампер.![]() Чтобы сделать это с рабочим циклом 33%, у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Чтобы сделать это с рабочим циклом 33%, у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь сила тока 3 ампера дает в 9 раз (в квадрате) больший эффект нагрева, чем 1 ампер.
Но если 3 ампера текут только 1/3 всего времени — значит нагрев двигателя 9раз за 1/3 времени — или в 3 раза больше, чем постоянный 1 ампер! Говорят, что этот сигнал имеет «форм-фактор» 3.
Однако, если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным. Например, двигатель Линча имеет индуктивность всего 39 мкГн (это один из двигателей с самой низкой индуктивностью, которые я знаю) и сопротивление 0,016 Ом. «Постоянная времени» для цепи L-R равна L/R, что (для двигателя Линча) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 мкГн, а сопротивление 40 мОм, что дает постоянную времени 5 мс.
Как правило, во избежание лишней математики период повторения импульсов должен быть значительно короче постоянной времени двигателя.![]()
Другими факторами, влияющими на ЧПИ, являются:
Если он находится в звуковом диапазоне, двигатель может издавать гул (вызванный явлением, известным как «магнитострикция», поэтому держитесь выше звукового диапазона). из одного состояния в другое, поэтому частота не должна быть слишком высокой — полевые МОП-транзисторы можно использовать с осторожностью до 100 кГц, но это становится немного выше.0007 РЧ-излучение: оно увеличивается с увеличением частоты, поэтому держите частоту как можно ниже!
Очевидно, трудно выбрать «лучший» компромисс между ними, но оптимальная частота, по-видимому, составляет около 20 кГц.
Существует более подробная версия этой страницы вместе с большим количеством технических деталей на нашем дочернем сайте 4qdtec.com
Рекламная пауза…. приходите и посмотрите на наш полный ассортимент контроллеров!
Понимание влияния ШИМ при управлении бесщеточным двигателем постоянного тока
Цели обучения
- Понимание коммутации бесщеточного двигателя постоянного тока.
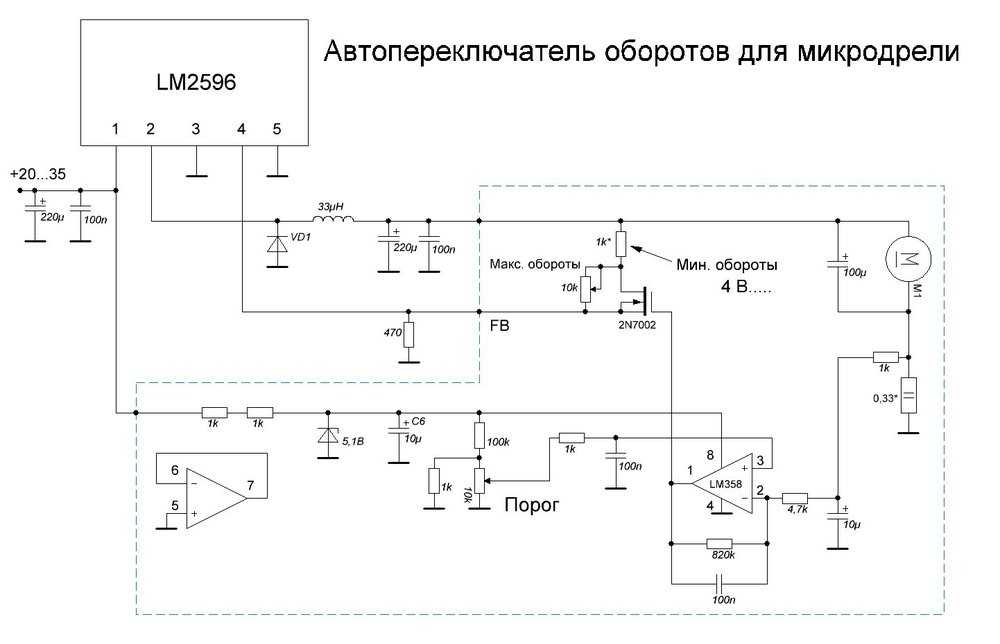
- Обзор регулирования ШИМ для бесщеточных двигателей постоянного тока.
- Узнайте пределы ШИМ для бесколлекторных двигателей постоянного тока.
Разработчики систем управления движением часто сталкиваются с трудностями при выборе или разработке электроники, использующей широтно-импульсную модуляцию (ШИМ) для управления бесщеточными двигателями постоянного тока. Полезно помнить о некоторых основных физических явлениях, чтобы избежать непредвиденных проблем с производительностью. В этом документе приведены общие рекомендации по использованию ШИМ-драйвера с бесщеточным двигателем постоянного тока.
Рис. 1: Пример Н-моста трехфазного двигателя, состоящего из шести транзисторов, с подключениями к трем фазам двигателя. Предоставлено: Portescap
Коммутация бесщеточного двигателя постоянного тока
В отличие от щеточных двигателей постоянного тока, в которых коммутация осуществляется механически щетками, бесщеточные двигатели постоянного тока коммутируются электронным способом.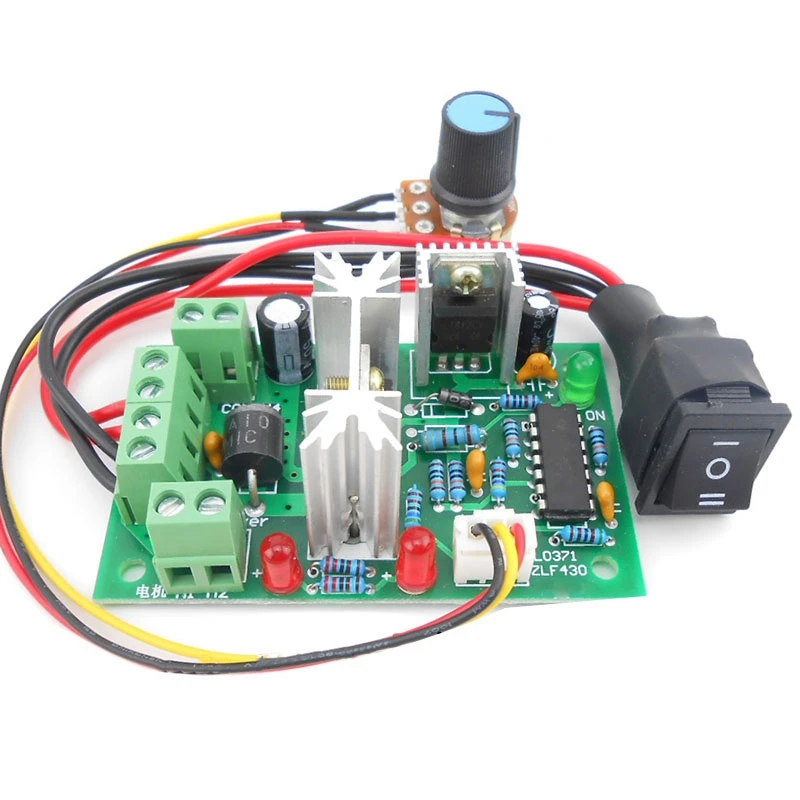 Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Рис. 2: Схематическое поперечное сечение запуска бесщелевого двигателя постоянного тока Шаг 3. Синяя область — это ротор с двухполюсным постоянным магнитом. Магнитное поле, создаваемое магнитом, показано синей стрелкой. Оранжевая область — трехфазная обмотка. Когда ток течет из фазы A в фазу C, он индуцирует магнитное поле, которое для упрощения представлено оранжевой стрелкой. Ротор будет вращаться, когда обе стрелки выровняются. Привод будет коммутировать фазы (вращая магнитное поле статора, оранжевая стрелка), чтобы поддерживать угол как можно ближе к 90 градусов между магнитными полями статора и ротора (максимальный создаваемый крутящий момент).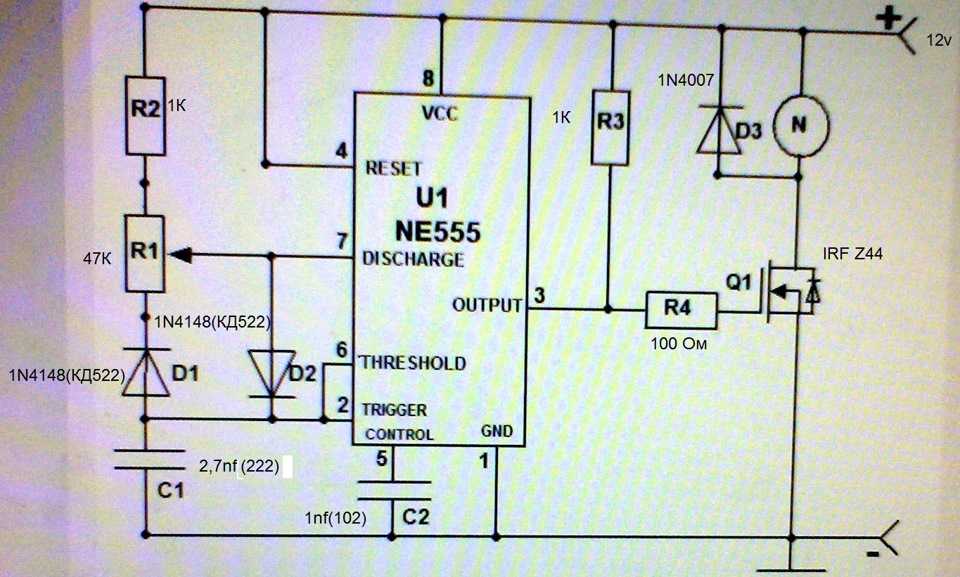 Предоставлено: Portescap
Предоставлено: Portescap
Открытие и закрытие транзисторов в определенной последовательности возбуждает фазы двигателя для поддержания оптимальной ориентации магнитного поля, индуцируемого статором по отношению к магниту ротора (см. рис. 2, рис. 3 и рис. 4).
Рис. 3: Фазный ток и состояние датчика Холла с шестиступенчатой коммутацией. Предоставлено: Portescap
Двигатель может приводиться в действие широко используемой шестиступенчатой трапециевидной коммутацией (см. рис. 3) или может использоваться для достижения более совершенного векторного управления, также называемого поле-ориентированным управлением (FOC). , в зависимости от сложности электроники (см. рис. 4).
Рис. 4: Фазный ток при использовании усилителя на ВОК. Предоставлено: Portescap
Регулирование ШИМ для бесщеточных двигателей постоянного тока
В щеточном (см. рис. 5) или бесщеточном двигателе постоянного тока (см. рис. 6) рабочая точка (скорость и крутящий момент) приложения может варьироваться. Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то и другое, для достижения желаемого выходного сигнала движения.
Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то и другое, для достижения желаемого выходного сигнала движения.
Часто существует два разных способа изменения напряжения или тока:
- Линейные приводы (или линейные усилители)
- Драйверы прерывателя (или линейные усилители).
Линейные усилители регулируют мощность, подаваемую на двигатель, путем изменения напряжения или тока. Мощность, которая не передается двигателю, рассеивается (потеря мощности, см. рис. 6). В результате для рассеивания мощности требуется большой радиатор, что увеличивает размер усилителя и затрудняет его интеграцию в приложение.
Усилитель-прерыватель модулирует напряжение (и ток) путем включения и выключения силовых транзисторов. Основным преимуществом является экономия энергии, когда транзистор выключен. Это помогает продлить срок службы батареи приложения, меньше нагревает электронику и позволяет уменьшить размер электроники. Большую часть времени в усилителях с прерывателем используется метод ШИМ.
Рисунок 5: Сравнение архитектуры управления движением между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока. Предоставлено: Portescap
Метод ШИМ заключается в изменении рабочего цикла на фиксированной частоте (см. рис. 7) для регулировки напряжения или тока в пределах желаемого целевого значения. Обратите внимание, что одним из преимуществ метода ШИМ для прерывания тока по сравнению с другими методами является то, что частота переключения является фиксированным параметром. Это облегчает разработчикам электроники фильтрацию генерируемых акустических и электромагнитных помех.
Рис. 6: Пример линейного усилителя, питающего двигатель. Мощность, постоянно рассеиваемая драйвером для этой катушки двигателя, составляет: P_dissipated (усилитель) = (24 – 19) * 1 = 5 Вт Предоставлено: Portescap
двигатель — это полное напряжение шины. Когда транзистор открыт 50 % времени, среднее напряжение, подаваемое на двигатель, составляет половину напряжения на шине.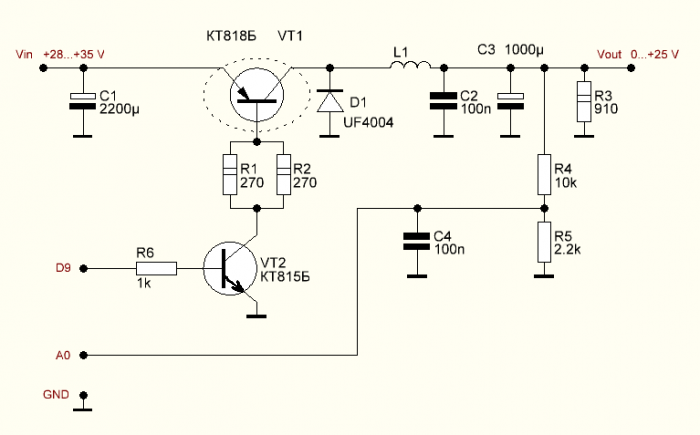 Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Рисунок 7: Различные рабочие циклы ШИМ. Обратите внимание, что частота одинакова для всех случаев, тогда как среднее напряжение (пунктирная линия) пропорционально коэффициенту заполнения. Предоставлено: Portescap
Эффект индуктивности в бесщеточных двигателях постоянного тока
Двигатель постоянного тока характеризуется индуктивностью L, сопротивлением R и противоэлектродвижущей силой (противо-ЭДС) E, включенными последовательно. Обратная ЭДС представляет собой напряжение, вызванное магнитной индукцией (закон индукции Фарадея-Ленца), которое противодействует приложенному напряжению и пропорционально скорости двигателя. См. рис. 8, на котором показан двигатель при включенной и выключенной ШИМ.
Рисунок 8: Упрощенные эквивалентные схемы, представляющие двигатель постоянного тока, когда ШИМ включен (слева) и выключен (справа). Для простоты правая схема соответствует режиму медленного затухания (ток рециркулирует в двигателе). Предоставлено: Portescap
Предоставлено: Portescap
А пока, для простоты, давайте не будем рассматривать обратную ЭДС.
При подаче напряжения или отключении напряжения в цепи RL дроссель будет препятствовать изменению тока. При приложении напряжения U к цепи RL ток будет следовать экспоненциальному росту первого порядка, динамика которого зависит от электрической постоянной времени τ, равной отношению L/R (см. рис. 9).). Оно асимптотически достигнет стационарного значения, то есть 99,7% U/R, после 5-кратного увеличения постоянной времени.
Рис. 9: Экспоненциальный рост тока в цепи RL. Предоставлено: Portescap
Такое же экспоненциальное поведение будет наблюдаться при разрядке цепи RL. См. рис. 10.
На практике бесщеточные усилители постоянного тока имеют довольно высокую частоту ШИМ и не позволяют току достигать установившегося состояния. Эта частота обычно выше 50 кГц, поэтому ток можно правильно модулировать с достаточным количеством циклов, возникающих на каждом этапе коммутации. Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Рисунок 10: Экспоненциальное падение тока в цепи RL. Предоставлено: Portescap
Бесщеточные двигатели постоянного тока имеют электрическую постоянную времени τ, равную нескольким сотням микросекунд. Таким образом, у тока будет время среагировать во время каждого цикла ШИМ (см. рис. 11). Однако механическая постоянная времени находится в диапазоне нескольких миллисекунд, поэтому разница между механической и электрической постоянной времени составляет 10. Поэтому ротор самого двигателя не успеет среагировать при переключении напряжения на типичных частотах ШИМ. Низкие частоты ШИМ в несколько тысяч герц могут вызывать вибрации ротора и слышимый шум. Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Пределы ШИМ для бесколлекторных двигателей постоянного тока
ШИМ приводит к нарастанию и падению тока в каждом цикле. Разница между минимальным и максимальным значением тока называется пульсацией тока ∆ I (см. рисунок 11). Пульсации сильного тока могут быть проблематичными. Желательно, чтобы он был как можно ниже.
Рис. 11: Типичные пульсации тока, создаваемые ШИМ с частотой 50 кГц в установившемся режиме (рабочий цикл 80 %). Рабочий цикл одинаков в обоих случаях, поэтому средний ток одинаков. На графике слева показаны низкие пульсации тока. Среднеквадратичное значение тока близко к среднему значению тока. На графике справа показаны высокие пульсации тока. Среднеквадратичное значение тока значительно выше, чем среднее значение тока. Предоставлено: Portescap
Крутящий момент двигателя постоянного тока пропорционален среднему току, как показано в формуле:
Обратите внимание, что для крутящего момента двигателя необходимо учитывать средний ток I avg .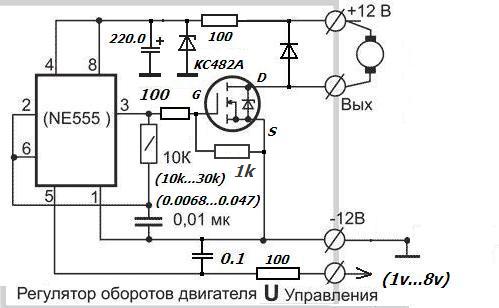 Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рис. 11, средний ток в обоих случаях одинаков (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рис. 11, средний ток в обоих случаях одинаков (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
В отличие от щеточных двигателей постоянного тока, бесщеточные двигатели постоянного тока не имеют щеток. Сильные пульсации тока не являются проблемой для самого срока службы. Пульсации тока будут иметь большое влияние на потери двигателя, вызывая ненужный нагрев. Пульсации тока будут генерировать два типа потерь:
Потери в Джоулях
Пульсации тока будут увеличивать среднеквадратичное значение тока, которое является значением, учитываемым при расчете потерь в Джоулях. Пульсации будут генерировать дополнительный нагрев без увеличения среднего тока и, следовательно, без увеличения крутящего момента. Обратите внимание, что это прямоугольная зависимость от среднеквадратичного значения тока.
Если T – период времени ШИМ, среднеквадратичное значение тока можно рассчитать по формуле: изменение магнитного поля в проводящем материале будет индуцировать напряжение, которое затем будет генерировать циркулирующие токи, называемые вихревыми токами.
Потери на вихревые токи пропорциональны квадрату скорости двигателя и квадрату тока двигателя. Основываясь на практических измерениях, когда пульсации тока высоки, дополнительные потери в стали могут стать значительными. Важно, чтобы пульсации тока были как можно меньше.
Давайте определим формулу текущей пульсации, чтобы мы могли определить рекомендации по ее минимизации.
Из схемы двигателя (см. рис. 8) мы можем вывести уравнение двигателя:
Предположим, что изменение тока является линейным в течение коротких периодов времени T_ON и T_OFF. Следовательно, мы можем переписать дифференциальное уравнение следующим образом:
В предположении установившегося состояния пульсации тока постоянны:
Таким образом, два уравнения можно объединить в одно:
Уравнение можно упростить, введя коэффициент заполнения D и частоту ШИМ пульсаций тока в зависимости от рабочего цикла ШИМ представляет собой параболу, как показано на рисунке 12.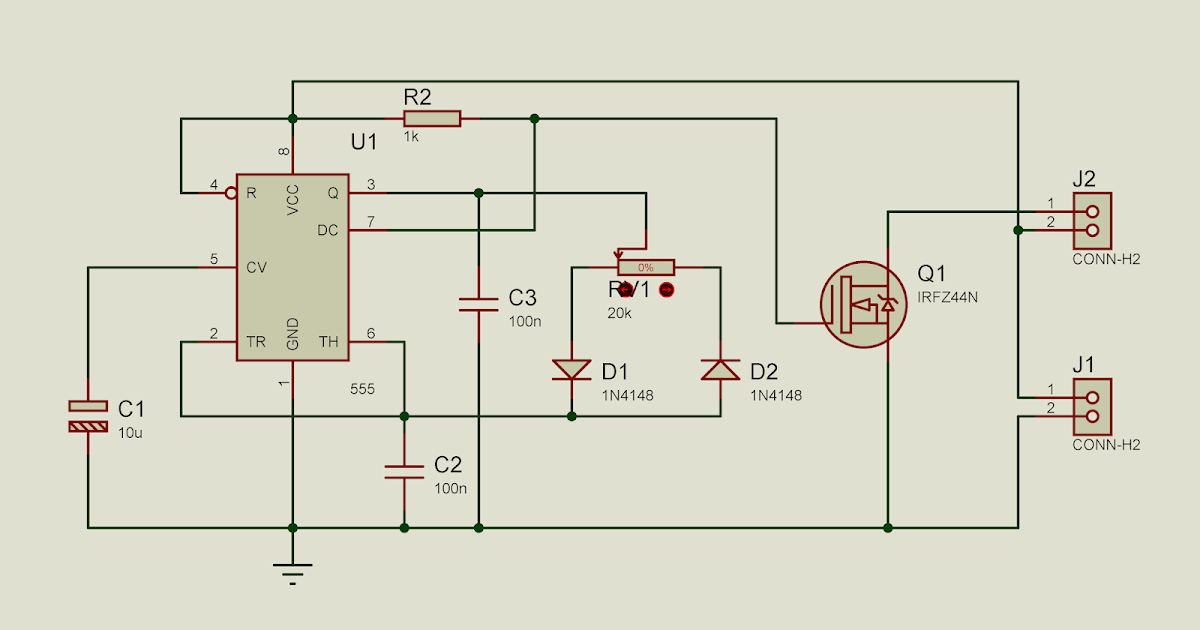
Рисунок 12: Пульсации тока в зависимости от рабочего цикла ШИМ. Предоставлено: Portescap
Максимальное значение пульсаций достигается при коэффициенте заполнения 50%, т.е. D=0,5:
Из уравнения. 15, there are several parameters influencing:
- The power supply U PWM
- The duty cycle D
- The PWM frequency f PWM
- The inductance L.
Recommendations to минимизация пульсаций тока в бесщеточных двигателях постоянного тока
Мы можем дать некоторые рекомендации по минимизации пульсаций:
Уменьшить или адаптировать напряжение питания
Пульсации тока пропорциональны напряжению питания. Наличие высокого напряжения питания может быть полезно для достижения экстремальных рабочих точек, требующих высокой скорости или большей мощности. Однако, если приложение не требует высокой скорости или мощности, более низкое напряжение питания будет полезно для уменьшения пульсаций тока.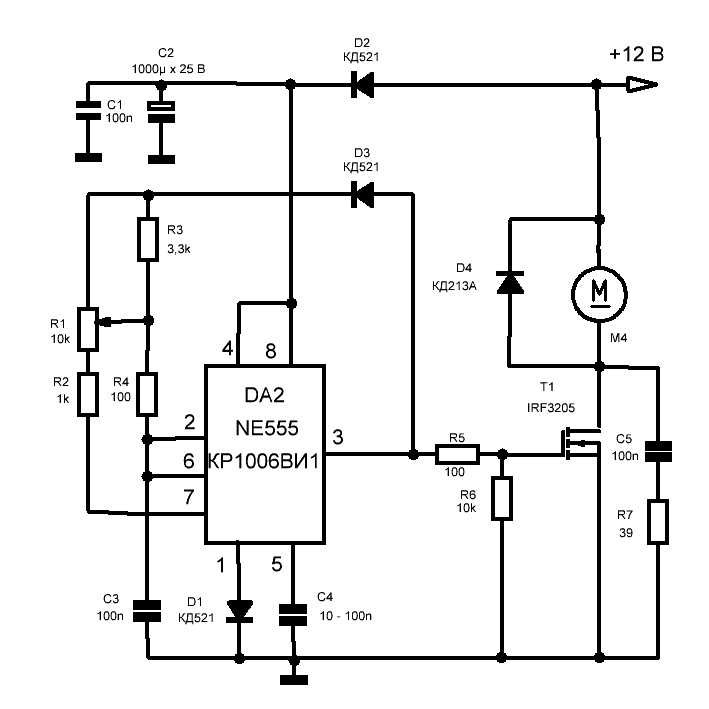 Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно удерживать рабочий цикл ШИМ как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно удерживать рабочий цикл ШИМ как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Увеличение частоты ШИМ
Чем выше частота, тем короче время цикла ШИМ; следовательно, у тока будет меньше времени для роста. Для бесколлекторных двигателей постоянного тока рекомендуются частоты ШИМ не менее 50 кГц. Частоты ШИМ 80 кГц и более были бы даже более подходящими для двигателей с очень малой электрической постоянной времени.
Увеличение индуктивности
Бесщеточные двигатели постоянного тока имеют очень маленькое значение индуктивности. Рекомендуется добавить внешние индуктивности, так как они будут замедлять нарастание и падение тока, тем самым уменьшая пульсации тока. Кроме того, указанное значение индуктивности дано для частоты ШИМ 1 кГц. Поскольку индуктивность двигателя изменяется в зависимости от частоты ШИМ, при типичной частоте ШИМ 50 кГц индуктивность может уменьшиться до 70 % от указанного значения. Часто добавляют дополнительные индуктивности в несколько десятков мкГн. Оптимальное значение индуктивности часто подтверждается экспериментально. Необходимо добавить дополнительные индуктивности, как показано на рис. 13.
Часто добавляют дополнительные индуктивности в несколько десятков мкГн. Оптимальное значение индуктивности часто подтверждается экспериментально. Необходимо добавить дополнительные индуктивности, как показано на рис. 13.
Рисунок 13: Бесщеточный двигатель с дополнительной индуктивностью. Предоставлено: Portescap
Хотя это решение решит текущую проблему с пульсациями, может быть непросто интегрировать дополнительные индуктивности, особенно когда пространство ограничено. Поэтому часто целесообразно сначала изучить два других варианта.
ШИМ имеет много преимуществ и является наиболее широко используемым решением для бесколлекторных драйверов постоянного тока. Установка соответствующего напряжения ШИМ и использование высокой частоты ШИМ поможет уменьшить пульсации и избежать использования дополнительных индуктивностей. Сегодняшняя стоимость электронных компонентов делает простым решением использование высокой частоты ШИМ. Разработчики электроники должны учитывать эти параметры при разработке системы управления движением, когда важны размер и вес электроники (например, портативные устройства со встроенной электроникой) или когда срок службы батареи является ключевым критерием (дополнительная энергия, рассеиваемая джоулевыми потерями на внутреннее сопротивление). дополнительных индуктивностей).
дополнительных индуктивностей).
Матье Буа — инженер по применению, Portescap. Под редакцией Марка Т. Хоске, менеджера по содержанию, Control Engineering, CFE Media , [email protected].
КЛЮЧЕВЫЕ СЛОВА: Бесщеточные двигатели постоянного тока с широтно-импульсной модуляцией
РАССМОТРИТЕ ЭТО
Вы решаете проблемы выбора или разработки электроники с использованием бесщеточных двигателей с широтно-импульсной модуляцией (ШИМ)?
ОНЛАЙН
www.controleng.com/discrete-manufacturing/motors-drives
www.portescap.com
У вас есть опыт и знания по темам, упомянутым в этом содержании? Вам следует подумать о том, чтобы внести свой вклад в нашу редакционную команду CFE Media и получить признание, которого вы и ваша компания заслуживаете. Нажмите здесь, чтобы начать этот процесс.
AB-022: Частота ШИМ для управления линейным движением
Частота ШИМ для линейного управления движением
Введение
Широтно-импульсная модуляция (или ШИМ) — популярный и эффективный метод управления двигателями постоянного тока, поскольку мы можем управлять двигателями со значительно меньшими потерями мощности, чем при непрерывном линейном регулировании.
Использование ШИМ позволяет управлять током в обмотках и, в свою очередь, выходным крутящим моментом, поскольку крутящий момент пропорционален среднему току обмотки. Отсюда следует, что ток будет пропорционален ШИМ из-за линейной реакции крутящего момента.
В цепи резистивная нагрузка будет иметь ток, пропорциональный ШИМ. Однако двигатели постоянного тока более сложны, чем резистивные нагрузки, они содержат индуктивность и при вращении создают обратную ЭДС.
Эти факторы обычно означают, что управление ШИМ не является строго линейным, частота ШИМ (а не только рабочий цикл) на самом деле весьма существенна для выходных параметров.
Эквивалентная схема основного коллекторного двигателя постоянного токаСвяжитесь с нами
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Когда двигатель находится в состоянии покоя (или вращается с очень низкой скоростью), то противо-ЭДС отсутствует (или она крайне мала) и схема упрощается. В этой ситуации ток ограничивается сопротивлением обмоток и индуктивностью катушки.
В этой ситуации ток ограничивается сопротивлением обмоток и индуктивностью катушки.
В качестве примечания: если двигатель работал от регулируемого источника постоянного тока, а не ШИМ, то ток будет определяться только сопротивлением, так как индуктивность не имеет импеданса при постоянном источнике.
Мы обновили приведенную ниже эквивалентную схему, чтобы отразить двигатель на низкой скорости или без скорости, состоящую только из последовательной цепи RL.
Эквивалентная схема двигателя постоянного тока в состоянии покоя (или на низкой скорости)Входное напряжение V равно сумме падения напряжения на катушке индуктивности и падения напряжения на резисторе:0008
Напряжение на катушке индуктивности с течением времени стремится к 0, в то время как напряжение на резисторе стремится к V. Это согласуется с интуитивной точкой зрения, что на катушке индуктивности будет напряжение только до тех пор, пока ток в цепи изменение — по мере того, как схема достигает установившегося состояния, дальнейшего изменения тока и, в конечном итоге, напряжения на катушке индуктивности не происходит.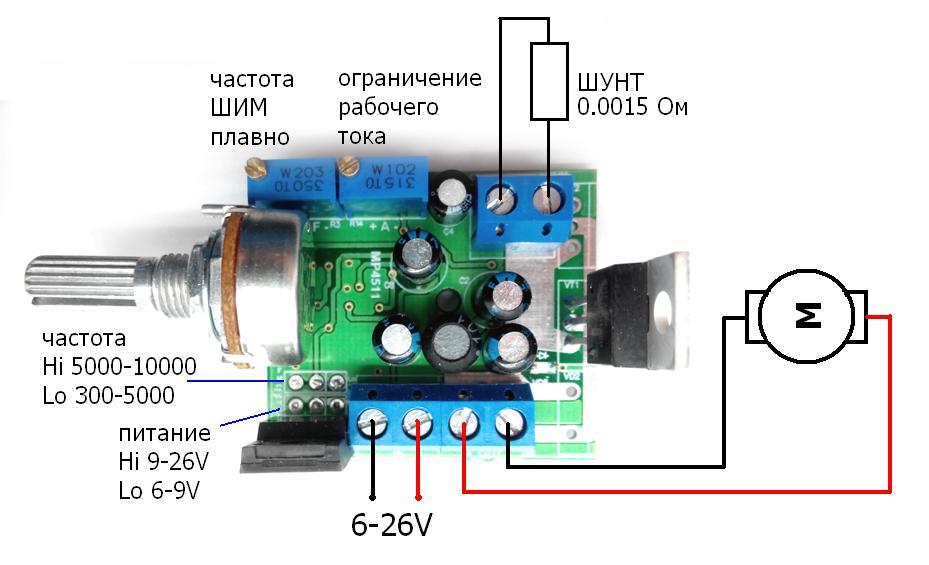
Цепи RL всех серий имеют постоянную времени, обычно обозначаемую 𝜏=𝐿𝑅, которая представляет собой время, за которое напряжение на компоненте достигает 1𝑒 своего конечного значения. 𝑉𝐿 будет оставаться на уровне 0 В, поэтому 𝜏 – это время, необходимое для 𝑉𝐿=𝑉(1𝑒). Точно так же 𝑉𝑅 будет опираться на входное напряжение V, поэтому 𝜏 время, необходимое для 𝑉𝑅=𝑉(1–1𝑒).
Когда в цепь подается напряжение, индуктивность L замедляет скорость нарастания тока. Это происходит потому, что индуктор создает обратную ЭДС, которая сопротивляется току, протекающему через него. Это предотвращает рост или падение тока (и, следовательно, напряжения на резисторе) намного быстрее, чем постоянная времени цепи.
В результате при включении источника питания ток не достигает мгновенно установившегося значения 𝑉𝑅. Вместо этого для завершения подъема требуется несколько постоянных времени.
Ток в цепи RL При использовании ШИМ для управления двигателем постоянного тока эта ситуация повторяется в течение каждого периода ШИМ.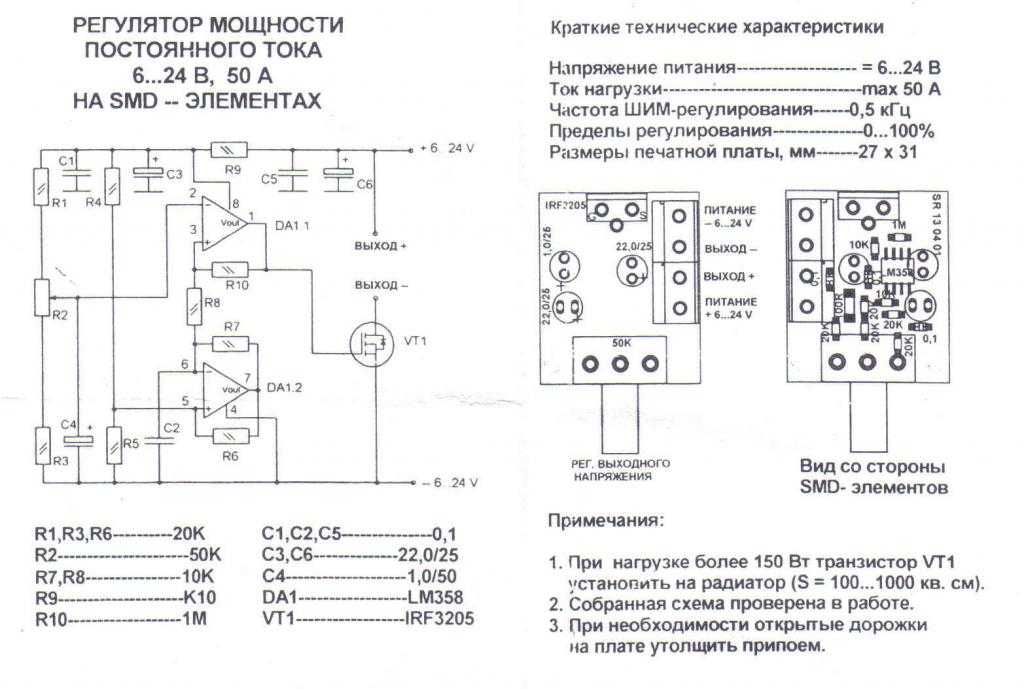 Если нагрузка только резистивная, частота ШИМ не имеет значения, но в этой RL-цепи рост тока ограничивается индуктивностью.
Если нагрузка только резистивная, частота ШИМ не имеет значения, но в этой RL-цепи рост тока ограничивается индуктивностью.
Следовательно, сигналы ШИМ, использующие более высокие частоты, дают меньше времени для нарастания тока.
Ток двигателя при двух разных частотах ШИМ, обе с нагрузкой 50 %Это означает, что для имитации линейного отклика время импульса «включено» для ШИМ должно быть больше 5 𝜏, т. е. 5 × 𝐿𝑅.
Например, если наш двигатель имеет постоянную времени 𝜏=10𝜇𝑠, минимальная ширина импульса должна быть больше 50𝜇𝑠.
Если наш минимальный полезный рабочий цикл ШИМ составляет 5%, то мы должны выбрать частоту, чтобы она была длиннее 50𝜇𝑠. Это дает минимальный период ШИМ 20×50𝜇𝑠=1𝑚𝑠. Период в 1 мс означает, что наша максимальная частота для линейного отклика составляет 1 кГц, может быть ниже, а при малых рабочих циклах ток не успевает приблизиться к своему установившемуся значению.
Расчеты для прецизионных микроприводов 110-003 Двигатель
Давайте попробуем рассчитать максимальную частоту ШИМ, которая дает линейную характеристику крутящего момента с разрешением ШИМ 1%.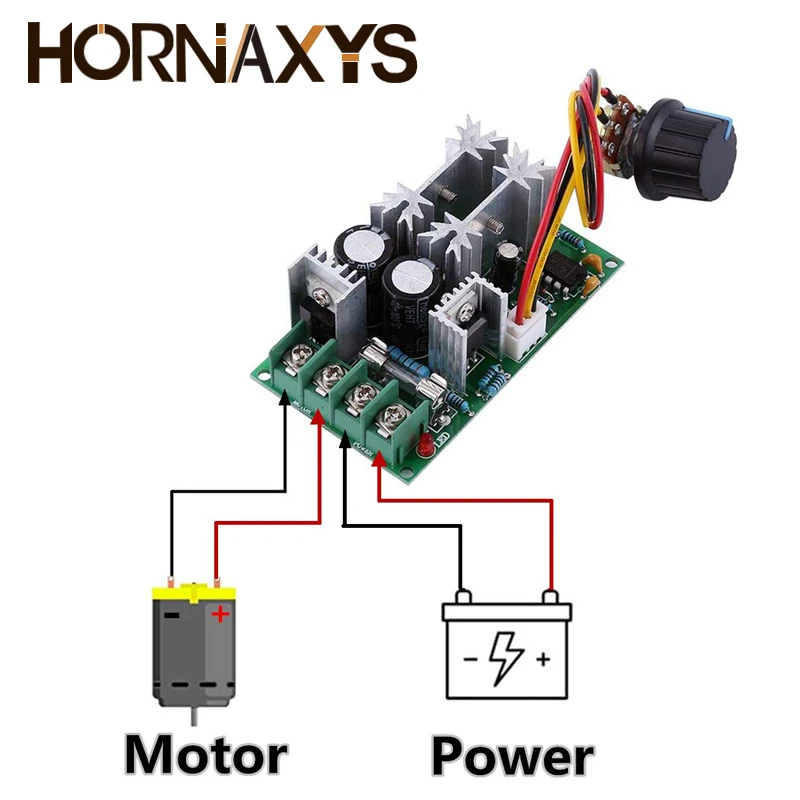 В этом примере мы используем двигатель постоянного тока 110-003 Micro Core™, технические характеристики которого можно найти в техническом описании (которое можно загрузить со страницы продукта).
В этом примере мы используем двигатель постоянного тока 110-003 Micro Core™, технические характеристики которого можно найти в техническом описании (которое можно загрузить со страницы продукта).
Номинальное напряжение = 1,5 В
Сопротивление = 3,4 Ом
Индуктивность = 19 мкм
Постоянная времени для этого двигателя: 𝜏 = 𝐿𝑅𝜏 = 0,000019𝐻3,4 Ом = 0,0000056 быть длиннее: 5,6𝜇𝑠×5=28𝜇𝑠
При минимальном разрешении ШИМ 1% минимальная ширина импульса составляет: 28𝜇𝑠×100=2800𝜇𝑠
Это определяет максимальную частоту для линейной характеристики (помните, что это когда индуктивность в обмотке двигателя не усредняет ток ниже уровня, обеспечивающего двигателю максимальный крутящий момент): 10,0028𝑠=357𝐻𝑧
То есть, если вы хотите максимизировать крутящий момент двигателя, управляйте им с помощью постоянного тока или ШИМ с частотой менее 357 Гц (в этом пример).
Тестирование с помощью двигателя Precision Microdrives 110-003
Цепь тестирования для двигателя 110-003 В приведенной выше тестовой схеме двигатель управлялся от источника ШИМ на ATmega168, который выводился через полевой МОП-транзистор.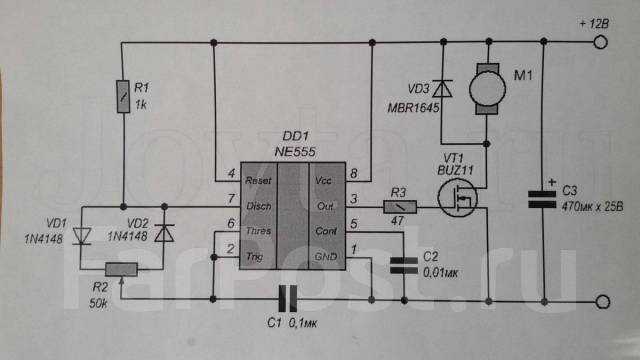 Регулятор напряжения LDO (LD1086) обеспечивал питание двигателя 1,5 В.
Регулятор напряжения LDO (LD1086) обеспечивал питание двигателя 1,5 В.
Измерялся ток между регулятором напряжения и двигателем, а также между истоком транзистора и землей. Вал двигателя был остановлен, чтобы имитировать нормальные условия, при которых двигатель работает с нагрузкой.
Три приведенных ниже снимка экрана относятся к трем разным частотам ШИМ: 200 Гц, 2 кГц и 31,25 кГц, но наш минимальный рабочий цикл на самом деле составляет 10%. Это означает, что мы должны увидеть линейное поведение на частотах ниже 3,571 кГц (в 10 раз больше расчетной минимальной частоты при коэффициенте заполнения 1%). Мы ожидаем, что сигналы 200 Гц и 2 кГц будут одинаковыми и будут близки к ожидаемому постоянному току, но сигнал 31,25 кГц будет достигать значительно более низкого тока.
Текущее значение на скриншотах — средний ток.
Ток в 110-003 с ШИМ 200 Гц при нагрузке 10 %Ток в 110-003 с ШИМ 2 кГц при нагрузке 10 %
Ток в 110-003 с ШИМ 31,25 кГц при нагрузке 10 %
Как мы видим, для частоты 31,25 кГц ток достигает почти 50% от значения для частоты 2 кГц. Если средний ток меньше, это означает, что выходной крутящий момент также меньше и не является линейной реакцией.
Если средний ток меньше, это означает, что выходной крутящий момент также меньше и не является линейной реакцией.
При частоте 2 кГц ток достигает значения, близкого к максимальному (как при истинном управлении постоянным током), поэтому мы можем ожидать, что частота 2 кГц даст линейную характеристику выше 10%. Точно так же при частоте 200 Гц пиковый ток снова достигает полного значения, как мы и ожидали в наших предварительных расчетах.
Важным примечанием является анализ работы двигателя на более низких частотах. Во время наших испытаний мы испытали некоторую вибрацию и тряску на валу двигателя при питании на частоте 200 Гц, поэтому для более плавной системы привода мы выбрали более высокую частоту.
Приведенные ниже данные и график позволяют лучше увидеть нелинейный отклик на высоких частотах. Мы изменили рабочий цикл для тех же трех частот, линейный отклик должен показать прямую линию между рабочим циклом и потребляемым током. Это означает, что изменение между 75 % и 80 % должно давать такое же изменение крутящего момента (потребляемого тока), как и от 5 % до 10 %.
Ток двигателя в зависимости от режима ШИМ на разных частотах
Мы видим, что хотя частоты 200 Гц и 2 кГц не полностью соответствуют теоретическому идеалу (похоже, есть небольшое изменение градиента выше ~83%), нелинейность гораздо более выражена на частоте 31,25 кГц.
Важно найти приемлемый баланс между линейным поведением, шумом и нежелательной вибрацией. Для многих приложений нелинейность на более высоких частотах не будет проблемой, или преимущества более высоких частот перевешивают недостатки.
Однако, если ваше приложение требует высокой степени линейности от высокочастотного сигнала привода ШИМ, вы можете рассмотреть следующее для повышения производительности:
1. Переключение частоты ШИМ при запуске двигателя, снижение частоты может дать более высокий выходной крутящий момент. Это можно сделать с большинством микроконтроллеров, которые имеют аппаратный ШИМ-генератор, обычно с фазокорректным режимом работы
2. Увеличить разрешение ШИМ и сделать справочную таблицу в коде для реакции двигателя. Мы можем изменять ШИМ, чтобы компенсировать нелинейный отклик двигателя
Увеличить разрешение ШИМ и сделать справочную таблицу в коде для реакции двигателя. Мы можем изменять ШИМ, чтобы компенсировать нелинейный отклик двигателя
3. Добавление датчика тока и создание ШИМ-регулятора с обратной связью для изменения частоты или коэффициента заполнения для линейного отклика
Все эти варианты требуют дополнительных ресурсов или кодирования, если это возможно, использование ШИМ с более низкой частотой упрощает конструкцию.
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.
Зарегистрироваться
ИмяПервое Последний
Электронная почта(обязательно)
Условия согласия(обязательно)Я прочитал и согласен с Условиями и Политикой конфиденциальности Precision Microdrives
Согласие на обсуждение (обязательно)Я рад, что Precision Microdrives получил мои данные, чтобы мы могли обсудить мой запрос
Узнать больше
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Управление двигателем постоянного тока с помощью ШИМ-сигналов — Arduino — Robo India || Учебники || Изучите Ардуино |
Arduino 2 комментария
В этом руководстве Robo India объясняется, как управлять скоростью двигателя постоянного тока с помощью сигналов ШИМ.
1. Введение
Скорость двигателя постоянного тока в целом прямо пропорциональна напряжению питания, поэтому, если уменьшить напряжение с 9вольт до 4,5 вольт, тогда наша скорость станет вдвое меньше первоначальной. Но на практике для изменения скорости двигателя постоянного тока мы не можем все время изменять напряжение питания. ШИМ-регулятор скорости для двигателя постоянного тока работает путем изменения среднего напряжения, подаваемого на двигатель.
ШИМ-сигнал представляет собой прямоугольную волну высокой частоты (обычно более 1 кГц). Рабочий цикл этой прямоугольной волны варьируется для изменения мощности, подаваемой на нагрузку.
Рабочий цикл этой прямоугольной волны варьируется для изменения мощности, подаваемой на нагрузку.
Входные сигналы, подаваемые на ШИМ-контроллер, могут быть аналоговыми или цифровыми сигналами в зависимости от конструкции ШИМ-контроллера. ШИМ-контроллер принимает управляющий сигнал и регулирует рабочий цикл ШИМ-сигнала в соответствии с требованиями. На приведенной ниже диаграмме показаны формы сигналов, полученные на выходе при различных требованиях к напряжению.
В этих волнах частота одинакова, но время включения и выключения разное.
1.2 Требуемое оборудование
1.3 Драйвер двигателя L293D IC Pin Out
Драйвер двигателя представляет собой модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя разработан и разработан. на базе микросхемы L293D.
L293D представляет собой 16-контактную микросхему с восемью выводами на каждой стороне для одновременного управления двумя двигателями постоянного тока.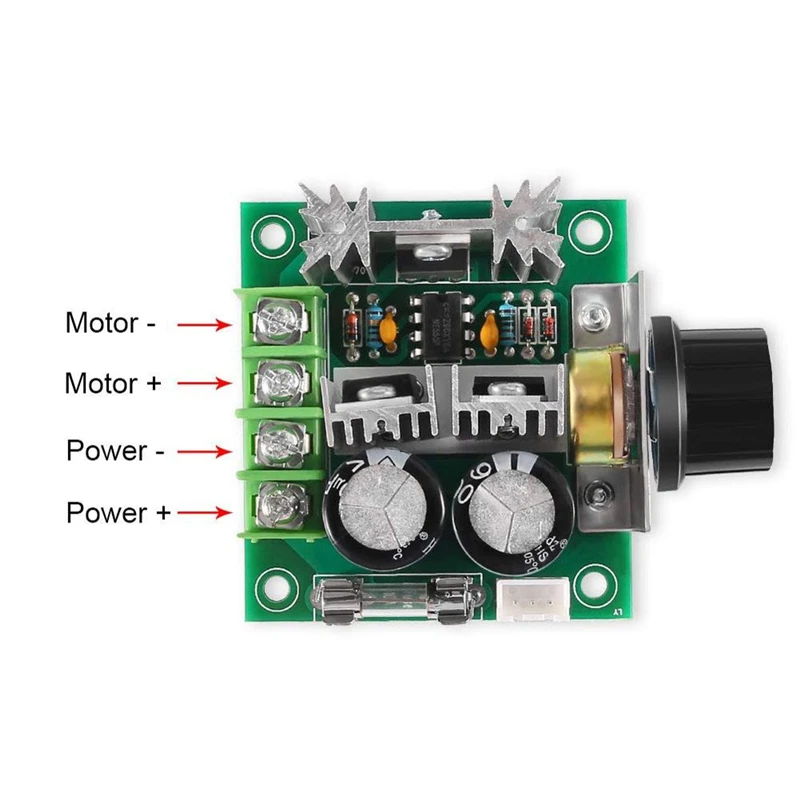 Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: Когда Enable1/2 имеет ВЫСОКИЙ уровень, левая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.
Контакт 4/5: контакты заземления
Контакт 6: выход 2, этот контакт соединен с одной клеммой двигателя.
Контакт 7: Вход 2, когда на этом контакте ВЫСОКИЙ уровень, ток будет течь через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели от 5 В до 36 В максимум, в зависимости от подключенного двигателя.
Контакт 9: Когда Enable 3/4 имеет ВЫСОКОЕ значение, правая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 11 и 14, будет вращаться.
Контакт 10: Вход 4, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 4.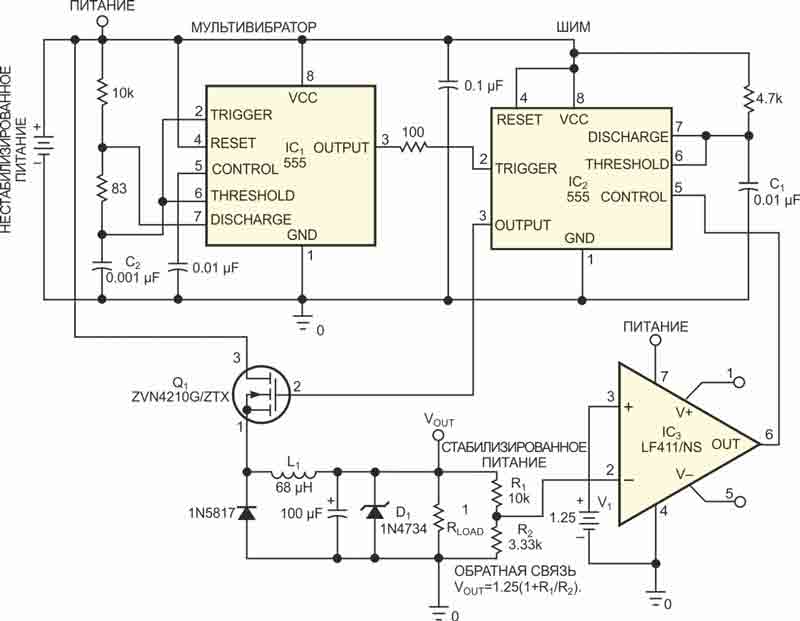
Контакт 11: Выход 4, этот контакт соединен с одной клеммой двигателя.
Контакт 12/13: контакты заземления
Контакт 14: выход 3, этот контакт соединен с одной клеммой двигателя.
Контакт 15: Вход 3, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 3.
Контакт 16: VCC, для подачи питания на микросхему, т. е. 5 В.
2. Соединения с Arduino
1. Модуль 5В (VCC) – Arduino 5В.
2. Модуль GND — Arduino GND.
3. Модуль 1 – Arduino D8.
4. Модуль 2 – Arduino D9.
5. Модуль 3 – Arduino D10.
6. Модуль 4 – Arduino D11.
7. Модуль EN12 – Arduino D5.
8. Модуль EN34 — Arduino D6.
9. Модуль двигателя Винтовые клеммы – двигатели постоянного тока.
10. Модуль питания VSS Винтовой зажим- Внешний источник питания 9В.
Убедитесь, что убрана предустановка Jumper на контактах Enable модуля, чтобы мы могли подключить вход PWM к этому контакту и управлять скоростью двигателей. Если мы подключим эти контакты к земле, то двигатель отключится.
Если мы подключим эти контакты к земле, то двигатель отключится.
3. Программирование:
Вот код для запуска этой схемы.
Вы можете скачать этот код (Arduino Sketch) отсюда.
//Учебное пособие от RoboIndia по управлению двигателем с использованием ШИМ-сигналов
//Требуемое оборудование: драйвер двигателя (от RoboIndia и Arduino)
// Двигатель А
const int inputPin1 = 10; // Контакт 15 микросхемы L293D
const int inputPin2 = 11; // Контакт 10 микросхемы L293D
// Двигатель Б
const int inputPin3 = 9; // Контакт 7 микросхемы L293D
const int inputPin4 = 8; // Контакт 2 микросхемы L293D
инт EN1 = 5; // Контакт 1 микросхемы L293D
инт EN2 = 6; // Пин 9микросхемы L293D
недействительная установка ()
{
pinMode(EN1, ВЫХОД); // куда подключен двигатель
pinMode(EN2, ВЫХОД); // куда подключен двигатель
pinMode (входPin1, ВЫХОД);
pinMode(inputPin2, ВЫХОД);
pinMode(inputPin3, ВЫХОД);
pinMode(inputPin4, OUTPUT);
Серийный номер .
