Как работает ШИМ управление вентилятором. Какие бывают типы вентиляторов и способы управления ими. Схемы и принципы работы ШИМ-контроллеров для вентиляторов. Преимущества и особенности применения ШИМ для регулировки скорости вращения.
Принципы ШИМ управления вентиляторами
Широтно-импульсная модуляция (ШИМ) является одним из наиболее эффективных способов управления скоростью вращения вентиляторов охлаждения. Рассмотрим основные принципы работы такого метода:
- На вентилятор подается импульсный сигнал с определенной частотой (обычно 25 кГц)
- Изменяя скважность (соотношение длительности импульса к периоду) этого сигнала, регулируют среднее напряжение на вентиляторе
- Чем больше скважность, тем выше скорость вращения вентилятора
- При скважности 100% вентилятор вращается на максимальной скорости
- При скважности 0% вентилятор останавливается
Таким образом, ШИМ позволяет плавно регулировать обороты в широком диапазоне, сохраняя высокую энергоэффективность.
Типы вентиляторов и способы управления ими
Существует несколько основных типов вентиляторов охлаждения:
1. Двухпроводные вентиляторы
Имеют только провода питания +12В и GND. Управлять можно:
- Изменением напряжения питания
- Низкочастотной ШИМ по цепи питания
2. Трехпроводные вентиляторы
Дополнительно имеют провод тахометра для измерения скорости. Управление аналогично двухпроводным.
3. Четырехпроводные вентиляторы
Имеют отдельный вход для ШИМ-сигнала управления. Это наиболее удобный вариант для точного контроля скорости.
Какие вопросы возникают при подключении различных типов вентиляторов к контроллеру ШИМ. Как обеспечить совместимость разных моделей с системой управления.
Схемы ШИМ-контроллеров для вентиляторов
Рассмотрим две базовые схемы ШИМ-контроллеров для управления вентиляторами:
Простой ШИМ-контроллер на таймере 555
Эта схема позволяет вручную регулировать скорость вращения с помощью переменного резистора:
- Таймер 555 генерирует ШИМ-сигнал
- Транзистор коммутирует питание вентилятора
- Частота около 25 кГц
- Скважность регулируется потенциометром
Микроконтроллерный ШИМ-контроллер
Более функциональная схема на базе микроконтроллера:
- МК генерирует ШИМ программно
- Возможность автоматического управления по температуре
- Поддержка нескольких каналов для разных вентиляторов
- Измерение скорости через тахометр
Какие преимущества дает использование микроконтроллера для управления вентиляторами по сравнению с аналоговыми схемами. Как реализовать автоматическое управление скоростью по температуре.
Преимущества ШИМ управления вентиляторами
ШИМ метод имеет ряд важных преимуществ:
- Высокая энергоэффективность — минимальные потери на регулирующем элементе
- Плавная и точная регулировка во всем диапазоне скоростей
- Возможность программного управления для автоматизации
- Низкий уровень электромагнитных помех
- Простота реализации на базе современных микроконтроллеров
Благодаря этим достоинствам, ШИМ стал стандартом де-факто для управления вентиляторами в компьютерной и промышленной технике.
Особенности применения ШИМ для вентиляторов
При проектировании систем ШИМ-управления вентиляторами следует учитывать некоторые нюансы:
- Частота ШИМ должна быть выше 20 кГц для бесшумной работы
- Необходима защита от короткого замыкания в цепи вентилятора
- Желательно измерение скорости через тахометр для контроля работы
- Нужно обеспечить плавный пуск для снижения пусковых токов
- При низких скоростях возможна вибрация — нужно подбирать минимальную скорость
Как правильно выбрать частоту и параметры ШИМ-сигнала для конкретной модели вентилятора. Какие проблемы могут возникнуть при слишком низкой частоте ШИМ.
Применение ШИМ управления в компьютерной технике
ШИМ широко используется для управления вентиляторами в современных компьютерах:
- Управление кулерами процессора и видеокарты
- Регулировка скорости корпусных вентиляторов
- Контроль вентиляторов в блоках питания
- Управление насосами в системах жидкостного охлаждения
Это позволяет оптимизировать охлаждение, снизить шум и энергопотребление компьютера. Многие материнские платы имеют встроенные контроллеры для ШИМ-управления вентиляторами.
Как настроить автоматическое управление вентиляторами в BIOS/UEFI современных материнских плат. Какие возможности предоставляют программы для мониторинга и контроля скорости вентиляторов в Windows.
Как управлять вентилятором — chipenable.ru
Компактные электрические вентиляторы, благодаря невысокой цене, используются для охлаждения оборудования уже больше полувека. Тем не менее только в последние годы технологии управления вентиляторами стали значительно развиваться. В этой статье описано как и почему это развитие имело место быть и предложены некоторые полезные решения для разработчиков.
Один из трендов электроники — это создание компактных устройств, обладающих богатой функциональностью. Поэтому большинство электронных компонентов приобретают все меньшие размеры. Один из очевидных примеров — современные ноутбуки. Толщина и вес ноутбуков значительно уменьшается, но потребляемая мощность остается прежней или увеличивается. Другой пример — проекционные системы и телевизионные ресиверы.
В ноутбуках большая часть тепла выделяется процессором, в проекторе — источником света. Это тепло необходимо бесшумно и эффективно удалять из системы. Самый тихий способ избавления от тепла — это использование пассивных охлаждающих компонентов, таких как радиаторы или тепловые трубки./F036M_(6-90V-15A)-03.JPG)
Другой способ удаления тепла — это активное охлаждение с использованием вентиляторов, создающих поток воздуха вокруг нагревающихся компонентов. Однако вентилятор являются источником шума и, кроме того, увеличивает суммарное энергопотребление устройства, что может быть критично при питании от аккумулятора. Также добавление вентилятора увеличивает количество механических компонентов в системе, что отрицательно сказывается на надежности изделия.
Контроль скорости вращения вентилятора позволяет уменьшить описанные недостатки. Поскольку запуск вентилятора на меньших оборотах снижает шум и энергопотребление и увеличивает срок его службы.
Существует несколько типов вентиляторов и способов их контроля. Один из вариантов классификации вентиляторов может быть таким:
1. 2-х проводные вентиляторы
3. 4-х проводные вентиляторы
Методы управления вентиляторами, обсуждаемые в этой статье, такие:
1. управление отсутствует
управление отсутствует
2. on/ff управление
3. линейное управление
4. низкочастотная широтно-импульсная модуляция (ШИМ, PWM)
5. высокочастотное управление
2-х проводные вентиляторы имеют только выводы питания — плюс и земля. В 3-х проводных вентиляторах добавляется тахометрический выход. На этом выходе присутствует сигнал, частота которого пропорциональна скорости вращения вентилятора. 4-х проводные вентиляторы, помимо выводов питания и тахометрического выхода, имеют вход управления. На этот вход подается ШИМ сигнал и ширина импульса этого сигнала определяет скорость вращения вентилятора.
2-х проводными вентиляторами можно управлять регулируя напряжение питания или скважность ШИМ сигнала. Однако без тахометрического сигнала невозможно понять на сколько быстро вентилятор вращается. Такая форма управления скоростью вращения вентилятора называется открытым контуром (open-loop).
3-х проводными вентиляторами можно управлять аналогичным образом, но в этом случае у нас есть обратная связь./F036M_(6-90V-15A)-02.JPG) Можно анализировать тахосигнал и устанавливать требуемую скорость. Такая форма управления называется закрытым контуром (closed-loop).
Можно анализировать тахосигнал и устанавливать требуемую скорость. Такая форма управления называется закрытым контуром (closed-loop).
Если управлять вентилятором регулируя напряжение питания, тахосигнал будет иметь форму меандра. И в этом случае тахосигнал будет всегда валидным, пока на вентиляторе есть напряжение. Такой сигнал показан на рисунке 1 (ideal tach).
При управлении вентилятором с помощью ШИМ — ситуация сложнее. Тахометрический выход вентилятора обычно представляет собой открытый коллектор. Поэтому тахосигнал будет валидным только при наличии напряжения на вентиляторе (on фаза ШИМ сигнала), а при отсутствии (off фаза) он будет подтягиваться к высокому логическому уровню. Таким образом тахосигнал становится «порубленным» управляющим ШИМ сигналом и по нему уже нельзя достоверно определять скорость вращения. Этот сигнал показан на рисунке 1 (tach).
Рисунок 1. Идеальный тахосигнал и тахосигнал при внешнем ШИМ управлении.
Для решения данной проблемы, необходимо периодически включать вентилятор на такой отрезок времени, который позволит получить несколько достоверных циклов тахосигнала. Такой подход реализован в некоторых контроллерах фирмы Analog Device, например в ADM1031 и ADT7460.
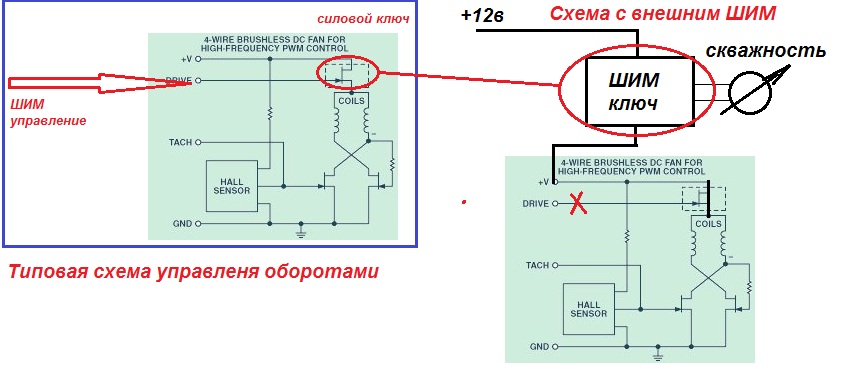
4-х проводные вентиляторы имеют ШИМ вход, который управляет коммутацией обмоток вентилятора к плюсовой шине источника питания. Такая схема управления не портит тахосигнал, в отличии от стандартной, где используется внешний ключ и коммутируется отрицательная шина. Переключение обмоток вентилятора создает коммутационный шум. Чтобы «сдвинуть» этот шум за пределы звукового диапазона частоту ШИМ сигнала обычно выбирают больше 20 кГц.
Еще одно преимущество 4-х проводных вентиляторов — это возможность задания низкой скорости вращения — до 10% от максимальной скорости. На рисунке 2 показана разница между 3-х и 4-х проводными вентиляторами.
Рисунок 2. 3-х и 4-х проводные вентиляторы
Управление отсутствует
Простейший метод управления вентилятором — отсутствие какого-либо управления вообще. Вентилятор просто запускается на максимальной скорости и работает все время. Преимущества такого управления — гарантированное стабильное охлаждение и очень простые внешние цепи. Недостатки — уменьшение срока службы вентилятора, максимальное энергопотребление, даже когда охлаждение не требуется, и непрерывный шум.
On/off управление
Следующий простейший метод управления — термостатический или on/off. В этом случае вентилятор включается только тогда, когда требуется охлаждение. Условие включения вентилятора устанавливает пользователь, обычно это какое-то пороговое значение температуры.
Подходящий датчик для on/off управления — это ADM1032. Он имеет выход THERM, который управляется внутренним компаратором. В нормальном состоянии на этом выходе высокий логический уровень, а при превышении порогового температурного значения он переключается на низкий. На рисунке 3 показан пример цепи с использованием ADM1032.
Рисунок 3. Пример on/off управления
Недостаток on/off контроля — это его ограниченность. При включении вентилятора, он запускается на максимальной скорости вращения и создает шум. При выключении он полностью останавливается и шум тоже прекращается. Это очень заметно на слух, поэтому с точки зрения комфорта такой способ управления далеко не оптимальный.
Линейное управление
При линейном управлении скорость вращения вентилятора изменяется за счет изменения напряжения питания. Для получения низких оборотов напряжение уменьшается, для получения высоких увеличивается. Конечно, есть определенные границы изменения напряжения питания.
Рассмотрим, например, вентилятор на 12 вольт. Для запуска ему требуется не меньше 7 В и при этом напряжении он, вероятно, будет вращаться с половинной скоростью от своего максимального значения. Когда вентилятор запущен, для поддержания вращения требуется уже меньшее напряжение. Чтобы замедлить вентилятор, мы можем понижать напряжение питание, но до определенного предела, допустим, до 4-х вольт, после чего вентилятор остановится. Эти значения будут отличаться в зависимости от производителя, модели вентилятора и конкретного экземпляра.
5-и вольтовые вентиляторы позволяют регулировать скорость вращения в еще меньшем диапазоне, поскольку их стартовое напряжение близко к 5 В. Это принципиальный недостаток данного метода.
Линейное управление вентилятором можно реализовать на микросхеме ADM1028. Она имеет управляющий аналоговый выход, интерфейс для подключения диодного температурного датчика, который обычно используется в процессорах и ПЛИС, и работает от напряжения 3 — 5.5 В. На рисунке 4 показан пример схемы для реализации линейного управления. Микросхема ADM1028 подключается ко входу DAC.
Рисунок 4. Схема для реализации линейного управления 12-и вольтового вентилятора
Линейный метод управления тише, чем предыдущие. Однако, как вы могли заметить, он обеспечивает маленький диапазон регулировки скорости вращения вентилятора. 12-и вольтовые вентиляторы при напряжении питания от 7 до 12 В, позволяют устанавливать скорость вращения от 1/2 от максимума до максимальной. 5-и вольтовые вентиляторы при запуске от 3,5 — 4 В, вращаются практически с максимальной скоростью и диапазон регулирования у них еще меньше. Кроме того, линейный метод регулирования не оптимален с точки зрения энергопотребления, потому что снижение напряжения питания вентилятора выполняется за счет рассеяния мощности на транзисторе (смотри рисунок 4). И последний недостаток — относительная дороговизна схемы управления.
Наиболее популярный метод управления скоростью вращения вентилятора — это ШИМ управление. При таком методе управления вентилятор подключается к минусой шине питания через ключ, а на управляющий вход ключа подается ШИМ сигнал. В данном случае к вентилятору всегда приложено либо нулевое, либо рабочее напряжение питания и не возникает таких энергопотерь, как при линейном методе управления. На рисунке 5 показана типовая схема реализующая ШИМ управление.
Рисунок 5. ШИМ управление.
Преимущество данного метода управления — простота реализации, дешевизна, эффективность и широкий диапазон регулирования скорости вращения. Однако недостатки у этого метода тоже есть.
Один из недостатков ШИМ управления — это «порча» тахосигнала. Этот недостаток можно устранить, используя так называемую pulse stretching технику, то есть удлиняя импульс ШИМ сигнала на несколько периодов тахосигнала. Конечно, при этом скорость вращения вентилятора может немного увеличится. На рисунке 6 показан пример.
Рисунок 6. Удлинение импульса для получения информации о скорости вращения.
Другой недостаток ШИМ управления — это коммутационный шум. Во-первых коммутация индуктивной нагрузки вызывает появление помех в цепях питания, во-вторых может возникать акустический шум — пищание, жужжание. Электрические шумы подавляют фильтрами, а для борьбы с акустический шумом частоту ШИМ сигнала поднимают до 20 кГц.
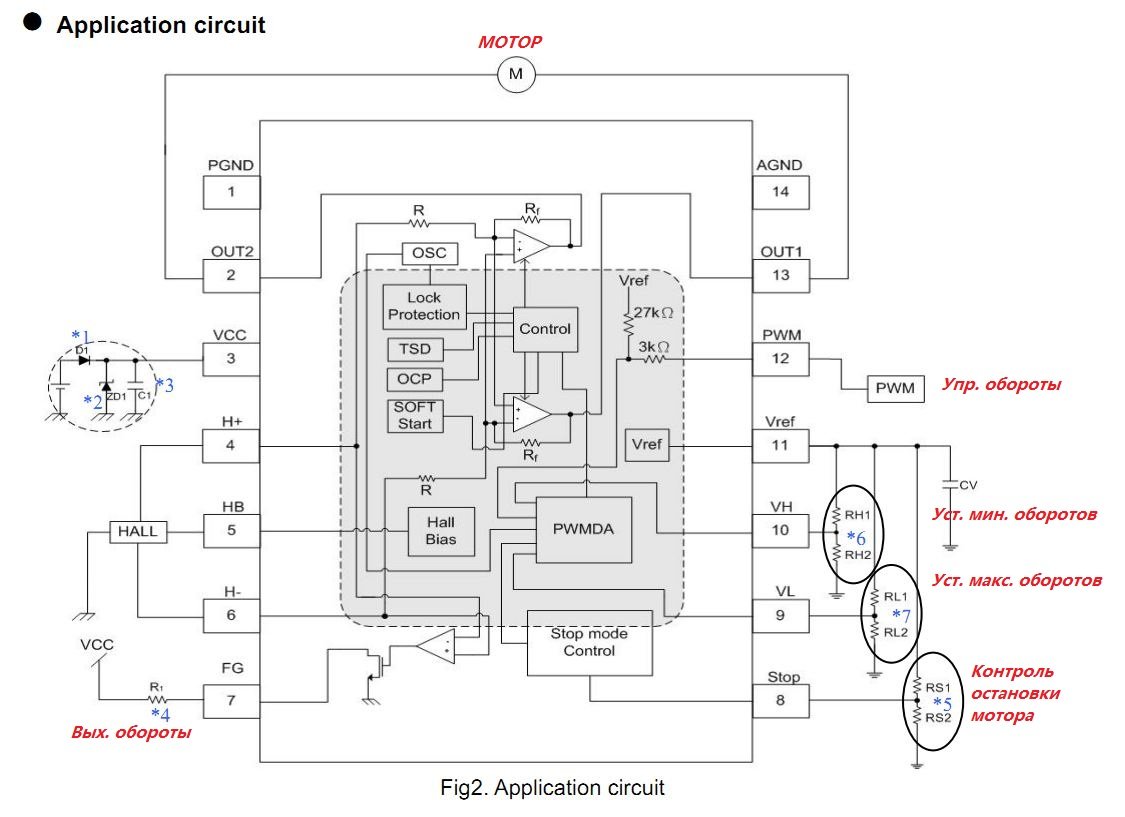
Также стоит снова упомянуть о 4-х проводных вентиляторах, в которых схема управления уже встроена. В таких вентиляторах коммутируется плюсовая шина питания, что помогает избежать проблем с тахосигналом. Одна из микросхем, предназначенных для реализации ШИМ управления 4-х проводными вентиляторами, — это ADT7467. Условная схема приведена на рисунке 7.
Рисунок 7. Схема ШИМ управления 4-х проводным вентилятором
Подводя итоги можно сказать, что наиболее предпочтительный метод управления вентилятором — это высокочастотное ШИМ управление, реализованное в 4-х проводных вентиляторах. При таком управлении отсутствует акустический шум, значительные энергопотери и проблемы с тахосигналом. Кроме того, он позволяет менять скорость вращения вентилятора в широком диапазоне. Схема ШИМ управления с коммутацией отрицательной шины обладает практически теми же достоинствами и является более дешевой, но портит тахосигнал.
По материалам фирмы AnalogDevices.
Управление вентиляторами — VerpIL
Управление вентиляторамиВентиляторы бывают
По количеству проводов
| Количество проводов | Функции |
| 2х проводные | + Питание (+12, +5 и т. д.) — Земля |
| 3х проводные | + Питание (+12, +5 и т. д.) — Земля S Тахометр (возвращает сигнал с частотой, пропорциональной скорости вращения.) |
| 4х проводные | + Питание (+12, +5 и т. д.) — Земля S Тахометр (возвращает сигнал с частотой, пропорциональной скорости вращения.) PWN PWM представляет собой систему контроля уровня питания, подаваемого на электромотор вентилятора, посредством изменения относительной ширины импульсов в цепи |
(2) Двух проводной вентилятор
Управлять скоростью вращения вентилятора, подключенного лишь по двум проводам, можно линейно (изменением напряжения питания), или же с помощью низкочастотной ШИМ.
Узнать, с какой скоростью он вращается (и вращается ли вообще) нельзя (цепь управления является незамкнутой)
(3) Трех проводной вентилятор
Тахометр замыкает цепь управления, можно узнать факт вращения и частоту.
ШИМ питание не позволяет чеико контролировать вращение вентилятора.
(4) Четырех проводной вентилятор
PWM.Позволяет добиваться четкого контроля за вращением вентилятора
Отличия 3 от 4 проводного вентилятора.
| PIN | Цвет | Назначение |
| 1 | Черный | Земля |
| 2 | Желтый | 12 вольт (может быть красным у трех проводных) |
| 3 | Зеленый | Тахометр (может быть желтый у трех проводных) |
| 4 | Синий | PWM сигнал управления |
Предпочтите 4 проводные вентиляторы, при их наличии выбираете PWM тип.
Про датчик Холла
Переход, на другой сайтШим управление вентилятором
Блок формирует необходимый сигнал управления вентилятором по энергосберегающему алгоритму, используя в качестве входного сигнала показания штатного или автономного аналогового датчика температуры ДВС. Выберите нужный вам товар, установив количество отличное от 0. Перед заполнением обратите внимание: — Если у Вас нет своего e-mail, то введите в это поле Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Сделайте ее, по возможности, более короткой, но понятной, например: «Н. Новгород Приморская 1 корп.
Поиск данных по Вашему запросу:
]]>Базы онлайн-проектов:
Данные с выставок и семинаров:
Данные из реестров:
Дождитесь окончания поиска во всех базах.По завершению появится ссылка для доступа к найденным материалам.
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Как снизить шум компьютера или дружим 3х пиновый вентилятор с pwmСодержание:
Как управлять вентилятором процессора?
Вход на сайт. Имя или Email:. Запомнить меня. Регистрация нового пользователя Забыли пароль? Расширенный поиск. А вопрос в следующем: в чём различие при подключении простого вентилятора и вентилятора с ШИМ-управлением скоростью вращения? У простого вентилятора штекер на три провода, а здесь на 4 провода. У меня HTPC, вот для него и решил взять такой тихий вентилятор, а вот получится подключить или есть какие-то нюансы, кто в курсе, подскажите.
А вот так ли обычно они подключаются или нет не знаю. У кого есть опыт с такими вентиляторами, подскажите, как подкличали! Прикреплённые файлы.
NEW А у меня все вентиляторы с таким подключением Прикреплённые файлы. Посмотрел вторую фотку — у тебя наружное управление вентиляторами? Про использование — втыкаем и пользуемся ; Если штырьков у тебя четыре, а на материнской плате три, то выбросил деньги на ветер — по четвёртому передаётся импульс, позволяющий регулировать вентилятор без твоего участия.
Ну а если наоборот то тоже не беда — просто регулировать будет нечего. Daddy Karlo свой человек Спасибо всем за подсказки! Вот ещё кое-какую инфу нашёл, может каму-нибудь ещё пригодится www. WishWaster Master of Disaster In Antwort auf: по четвёртому передаётся импульс, позволяющий регулировать вентилятор без твоего участия. В ответ на: что я зря паниковал, ключ выставлен таким образом, что по другому и не воткнёшь. У меня на кулерах 3 пина, но они регулируются без моего участия А материнка у тебя случайно не от Азус?
Тут многое даже не только от марки зависит, сколько от конкретной модели. Но, в принципе, вариант с 4-пиновым приводом своего рода гарант того, что всё действительно будет регулироваться на автомате. Именно Asus. Модель не помню, давно это было. If something sounds too good to be true, it probably is с. В ответ на: однозначно другой.
Как лучше сделать многоканальный драйвер PWM (ШИМ) вентиляторов на базе STM32?
Итак управление вентиляторами Управление двигателем В Как с помощью микроконтроллера и тиристора управлять двигателем В с опторазвязкой? Нужно крутить Что происходит с корпусными вентиляторами Доброго времени суток всем Не большая проблема в которой не могу разобраться. В моём корпусе Контролер управления вентиляторами или PWM?
Скорость вращения вентилятора при положениях регулятора, об/мин вращения одновременно с поддержкой ШИМ-метода управления питанием.
Подскажите, вентилятор олаждения двигателя
Первый из серии уроков, посвященных разработке регулятора скорости вращения коллекторного двигателя постоянного тока. Рассматривается аппаратное подключение двигателя к плате Ардуино. Игорь из Москвы заказал мне разработку контроллера- регулятора скорости вращения двигателя постоянного тока. Это продолжение бесконечной разработки интеллектуального сверлильного станка. Сначала я написал для него общую управляющую программу. Затем мы создали электронный прицел для станка на OSD-генераторе. Пришла очередь до двигателя, который вращает шпиндель. Необходимо задавать и стабилизировать его скорость вращения. Тема показалась мне очень интересной, и я решил в качестве уроков описать последовательность своих действий по разработке контроллера двигателя.
Кулер (система охлаждения)
В зависимости от модификации изделия — вентилятор или ,5W или 6W. Cхему хотелось бы универсальную чтоб не делать изменения. А попробуйте не убрав все фильтры. Конечно, при звуковой частоте ШИМ механика двигателя будет пищать.
Это так называемая «фазорезка». При этом ток питания контроллеров должен быть исключительно переменным.
Управление вентиляторами AC 220В
Читаете, вы, сейчас эти строки и слышите равномерный, в меру громкий шум кулера. Однозначно слышите, иначе вас бы не заинтересовала эта статья. На самом деле громкая работа кулера в Linux довольно частая проблема недавно перешедших с Windows-пользователей. А ведь он не должен так шуметь. В Windows, обороты вентилятора и многие другие параметры управляются автоматически в зависимости от нагрузки на систему и следовательно температуры оборудования, здесь же из коробки вентилятор всегда крутится на полную мощность, независимо от того, играете вы тяжелую игру, компилируете программу или просто просматриваете интернет страницы.
Уважаемый Пользователь!
Соблюдение Правил конференции строго обязательно! Флуд, флейм и оффтоп преследуются по всей строгости закона! Комментарии, содержащие оскорбления, нецензурные выражения в т. Для регистрации перейдите по ссылке, указанной ниже. Если у вас уже есть аккаунт в конференции, то для доступа ко всем функциям сайта вам достаточно войти в конференции под своим аккаунтом.
Buy EMCR-ACZL-TR — MICROCHIP — Управление вентилятором SMBus, ШИМ, В питание, мониторинг температуры с точностью 1°C, 1 выход.
Управление вентиляторами по ШИМ сигналу
Идея состоит в том, что бы питание взять напрямую с бп, а шим управление с отдельного устройства. Нужен внешний шим генератор с крулилкой. Нашел много шим контроллеров, но они все с силовой частью, расчитанные на 2-х проводные вентиляторы, а нужно именно управляющий сигнал.
Высокая производительность современных компьютеров имеет и обратную сторону: повышенное тепловыделение от чипов, установленных на системной плате, видеоадаптере, и даже в блоке питания. Именно поэтому, практически каждый ПК оснащен достаточно мощной системой охлаждения. Наиболее недорогой, простой и распространенный вариант — это охлаждение устройств посредством радиаторов, установленных непосредственно на чипы, и охлаждающих их вентиляторов. Но три или больше установленных вентилятора издают достаточно сильный шум.
Войти или зарегистрироваться.
Всем оверклокерам и продвинутым пользователям хорошо известна первая модель данной линейки — кулер Scythe Ninja, который японцы представили общественности в апреле далекого года. Он завоевал звание одного из лучших кулеров своего времени. С тех пор эта модель периодически обновлялась, получала новые номера версий и ревизии. Однако все эти модификации не добились такого ошеломляющего успеха, как самая первая. Scythe Ninja 2 Rev. B и Scythe Ninja 3. Что ж, времена идут и все меняется.
Работает мобильная версия. Нет в наличии. Продавец этого товара Rozetka.
ШИМ-контроллер вентилятора охлаждения | 2 Схемы
Всем доброго времени. Сейчас мы поговорим о регулировании скорости охлаждающих вентиляторов с ШИМ — широтно-импульсной модуляцией (PWM). Также изучим практический проект схемы контроллера для вентилятора или мощных светодиодов, который можно сделать из нескольких деталей.
В последнее время растет интерес к схемам драйверов для управления скоростью охлаждающих вентиляторов, используемых в электронном оборудовании. Простейшим двухпроводным драйвером является схема включения / выключения, которая запускает вентилятор с помощью управляющего сигнала, когда температура датчика превышает пороговое значение, и останавливает его, когда температура падает ниже порогового уровня.
В более сложных версиях драйверов используется линейная схема управления напряжением, в которой постоянное напряжение, подаваемое на вентилятор, меняется с помощью регулятора напряжения. Чтобы вентилятор работал на более низкой скорости, напряжение снижают, а для работы на более высокой скорости — повышают.
Наиболее современная схема драйвера для управления скоростью вентилятора использует метод ШИМ. В этой схеме драйвера управляющий сигнал с широтно-импульсной модуляцией обычно подается на полевой транзистор, который подключен к стороне высокого или низкого уровня вентилятора. Вентилятор будет включаться / выключаться с определенной частотой, а скорость вращения вентилятора регулируется рабочим циклом сигнала ШИМ.
Типы вентиляторов постоянного тока
Существует три основных типа вентиляторов постоянного тока (они же кулеры): двухпроводные, трехпроводные и четырехпроводные.
- Двухпроводной вентилятор имеет два контакта — питание и заземление. Этим вентилятором можно управлять либо путем изменения напряжения постоянного тока, либо с помощью управляющего сигнала ШИМ.
- У трехпроводного вентилятора есть сигнал тахометра, который показывает скорость вращения. Этим вентилятором также можно управлять, изменяя напряжение постоянного тока или используя низкочастотный управляющий сигнал ШИМ.
- Четырехпроводной вентилятор имеет специальный вход PWM, который можно использовать для управления скоростью.
Вентиляторы PWM и правила управления
Сигнал ШИМ прямоугольного типа должен подаваться на вход PWM вентилятора и соответствовать следующим спецификациям:
- Целевая частота: 25 кГц, допустимый диапазон от 21 кГц до 28 кГц
- Максимальное напряжение для низкого логического уровня: VIL = 0,8 В
- Абсолютный максимальный получаемый ток: Imax = 5 мА (ток короткого замыкания)
- Абсолютный максимальный уровень напряжения: Vmax = 5,25 В (напряжение холостого хода)
- Допустимый диапазон рабочего цикла: от 0% до 100% (не инвертируется. Рабочий цикл 100% PWM / 5 В приводит к максимальной скорости вентилятора)
Внешний подтягивающий резистор здесь не нужен, так как сигнал подтягивается до 3,3 В / 5 В внутри вентилятора. Кроме того, работа при цикле ШИМ ниже 20% официально не поддерживается в спецификации (неопределенное поведение). Тем не менее, большинство вентиляторов PWM могут работать при нагрузке ниже 20% и остановятся при рабочем цикле лишь 0%. Они работают на полной номинальной скорости при отсутствии входного сигнала ШИМ.
Внимание: подключение напряжения питания 12 В к выводу ШИМ приведет к немедленному повреждению вентилятора!
Далее показано изображение трехпроводного кулера. Кажется что это обычный бесщеточный мотор постоянного тока (BLDC) с выходом тахо-сигнала, но это вентилятор с ШИМ (KFB-1412H от Delta Electronics), сделанный для PS3, а его третий провод — для управления скоростью вентилятора.
Если надо подключить этот вентилятор, просто подайте 12 В на коричневый (+ V) и черный (GND) провода, а на серый (PWM) подайте последовательность импульсов уровня TTL (5 В), близкую к 25 кГц от сигнала генератора, и изменяйте коэффициент заполнения последовательности импульсов (0–100%), чтобы отрегулировать скорость.
Обычно скорость кулера с ШИМ масштабируется линейно с рабочим циклом сигнала PWM между максимальной скоростью при 100% и указанной минимальной скоростью при 20%. Например, если вентилятор с PWM имеет максимальную скорость 2000 об / мин и минимальную скорость 450 об / мин, он будет работать со скоростью 2000 об / мин при 100% PWM, 450 об / мин при 20% и около 1100 об / мин при 50% PWM.
Некоторые производители рекомендуют использовать для управления схему типа CMOS-инвертора, подобную показанной выше.
Схема самодельного ШИМ контроллера кулера
Основной выход PWM подключен к силовому транзистору (T1) для управления нагрузкой 12 В. Как видите, дополнительный инвертированный выход ШИМ также доступен для других целей. На самом деле столь мощный транзистор TIP41C (T1) в этой конструкции немного излишний, можете выбрать другой.
При экспериментах использовалась эта схема для «линейного» управления напряжением 2-проводного вентилятора 12V BLDC, и она работала отлично.
Шестиэлементный триггер Шмитта CD 40106 является основой этого проекта. Микросхема недорогая и будет работать в широком диапазоне напряжений.
CD4016 (CD4016B / CD40106BE) содержит шесть инверторов, которые можно использовать для создания простых генераторов сигналов прямоугольной формы с одним резистором и конденсатором. Вход подключен к конденсатору, который идет на землю, а резистор идет от выхода. С помощью одного потенциометра и двух диодов можно изменить рабочий цикл или ширину импульса прямоугольной формы. Потенциометр изменяет способ прохождения обратной связи через два диода, что приводит к асимметричным колебаниям.
Представленная простая конструкция может использоваться для управления различными типами вентиляторов и ламп (в том числе светодиодных). Генератор прямоугольных сигналов CD40106 генерирует управляющий ШИМ на основе частоты и рабочего цикла, установленных соответствующими компонентами синхронизации RC. Конечный выходной сигнал может в дальнейшем использоваться разными способами, при условии что он настроен правильно для предлагаемого устройства.
Шим контроллер для вентилятора – Защита имущества
Непонимание работы ШИМ или PWM ( Pulse-width modulation ) часто приводит не только к их неправильному использованию, но даже к ошибкам в проектировании устройств использующих ШИМ для управления. Здесь, ограничившись конкретным применением, я попытаюсь рассказать что такое ШИМ, для чего она требуется и как работает.
Сначала, что такое ШИМ.
| Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) — управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. |
Когда нужна ШИМ
Главной причиной применения ШИМ является необходимость обеспечить пониженным постоянным напряжением силовых устройств электроники при сохранении высокого КПД, особенно в управляемых электроприводах.
Во внутренних сетях аппаратуры для питания устройств используется постоянное напряжение ограниченного набора напряжений, которые часто требуется изменить под требования конкретного устройства, стабилизировать или регулировать его. Это могут быть электроприводы постоянного тока, чипы, узлы радиоаппаратуры.
Регулировку можно осуществлять с помощью гасящих напряжение устройств: резисторов, транзисторов (если требуется регулировка). Главный недостаток такого решения потери мощности и повышенное тепловыделение на регулирующих устройствах.
Поскольку известно что выделяемая мощность равна :
P = I x U или P = I 2 x R Вт.
то чем больше ток I в цепи и падение напряжения U , тем больше потери мощности. Здесь R – величина сопротивления регулирующего элемента.
Представьте что требуется погасить хотя бы 3 V при токе нагрузки 10 A , это уже 30 Вт истраченных в пустую. А каждый ватт теряемой мощности не только снижает продолжительность работы источников питания, но и требует дополнительного оборудования для вывода выделяемого, этой мощностью, тепла.
Это относится к гасящим резисторам и полупроводниковым приборам тоже.
Но хорошо известно, что полупроводниковые приборы очень хорошо (с малыми потерями и тепловыделением) работают как ключи, когда имеют только два состояния открыт/закрыт.
Этот режим позволяет снизить потери на коммутирующем полупроводниковом приборе до уровня:
U нас для современных полупроводниковых коммутаторов приближается к 0,3 v и при потребляемых токах 10 А потери мощности будут приближаться к 3 Вт. Это в режиме ключа, а при работе в устройствах ШИМ и меньше.
| В ШИМ в качестве ключевых элементов использует полупроводниковые приборы в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи весьма мал, и, хотя всё напряжение питания падает на транзисторе, выделяемая на транзисторе мощность практически равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность также мала. В переходных состояниях (переход ключа из проводящего состояния в непроводящее и обратно) мощность выделяемая в ключе значительна, но так как длительность переходных состояний крайне мала, по отношению к периоду модуляции, то средняя мощность потерь на переключение оказывается незначительной. |
Реализовать преимущества ключевого режима в схемах понижающих и регулирующих напряжение постоянного тока, позволило использование ШИМ.
Повторюсь, широтно-импульсная модуляция — управление средним значением напряжения на интегрирующей нагрузке путём изменения скважности импульсов, с помощью управляющего ключа.
Работа ШИМ на интегрирующую нагрузку показана на рис. 1.
Главным условиям такого применения ШИМ является наличие интегрирующей нагрузки.
Потому что амплитудное значение напряжения равно E .
Это могут быть интегрирующая RC, LC, RLC или RL цепи и механические интеграторы (например электромотор).
При работе ШИМ на интегрирующей нагрузке напряжение – эквивалентное постоянное напряжение изменяется в зависимости от скважности ( Q ) импульсов.
здесь: Q – скважность, t и – длительность импульса, T – период следования импульсов.
С учетом скважности эквивалентное постоянное напряжение будет равно:
E экв = Q x E Вольт
здесь: E экв – эквивалентное постоянное напряжение ( Вольт ), Q – скважность, E – напряжение источника от которого запитан ШИМ преобразователь ( Вольт ).
Реально на зажимы нагрузки ШИМ подается напряжение равное E , а работа совершаемая электрическим током (или число оборотов электродвигателя) определяется именно E экв . При восстановлении на интегрирующем конденсаторе получаем именно напряжение E экв.
Мощность выделяемая на управляющем ключе, управляемом ШИМ равна:
Схема подключения нагрузки к ШИМ.
Никаких отличных от схемы включения электродвигателя на постоянном токе (частный случай нагрузки) схемных решений ШИМ не требует. Просто электродвичатель подключается к источнику питания работающего в режиме ШИМ. Разве что, в определенных ситуациях требуется ввести дополнительную фильтрацию помех возникающих на фронтах импульсов. Этот фильтр на рис. 2 в виде конденсаторов и демпфирующего диода.
На рис. 2 показано такое подключение.
Мы видим, что коммутатор (полевой транзистор) можно просто заменить на переменный резистор.
Схема PWM
В статье «Переходник для вентилятора 3 pin на 4 pin» http://de1fer.ru/?p=45#more-45 владелец блога приводит схему вентилятора с P WM .
здесь: GND – земля (общий), Control – контакт P WM управления, +12 – напряжение питания, Sense – вывод датчика оборотов.
В данной схеме управление возможно скорее постоянным током +I упр, чем ШИМ сигналом.
Для управления импульсным (ШИМ) сигналом требуется схема изображенная на рис. 4. Да и судя по параметрам транзистора «PWM» он выбирался именно для управления постоянным током. По крайней мере он будет нормально работать в таком режиме с вентилятором до 1,6 Вт.
А вот в импульсном режиме без конденсатора C , транзистор BC879 будет греться немного меньше чем на постоянном токе и возможен останов электродвигателя на малых длительностях токового импульса (малых оборотах) из-за его интегрирования на входной емкости C вх транзистора.
Основные параметры кремниевого биполярного высокочастотного n-p-n транзистора BC879 от SIEMENS
| Pc max | Ucb max | Uce max | Ueb max | Ic max | Tj max, °C | Ft max |
| 800mW | 100V | 80V | 5V | 1A | 150°C | 200MHz |
В случае необходимости отключить PWM (ШИМ) управление в схеме показанной на рис. 3 необходимо просто соединить вывод Control с проводом +12v .
Есть другой вариант схемы вентилятора с P WM на форуме Radeon.ru
Существенных отличий от рис. 3 нет, только в качестве управляемого ШИМ ключа используется МОП полевой транзистор со встроенным или индуцированным каналом p- типа. Данная схема тоже может управляться как P WM так и постоянным напряжением (но рисковать не стоит – надо знать параметры транзистора).
Данная схема вполне работоспособна и не имеет недостатков схемы показанной на рис. 3.
Для отключения (в зависимости от типа транзистора) достаточно соединить вывод Control с проводом + или -.
Вниманию самодельщиков!
Я бы не рекомендовал применение вентиляторов имеющих встроенный PWM (4- pin ) одновременно с какими либо иным регуляторам оборотов вентилятора.
В случае если Вас не устраивает алгоритм управления PWM встроенного на материнскую (системную) плату.
И у Вас есть устраивающий Вас реобас (контроллер управления вентилятором), то используйте вентилятор с 3-pin соединитель.
Если вентилятор с PWM вам дорог или не имеет замены – то необходимо отключить PWM , способом описанным выше, заменив соединитель 4-pin на 3-pin и подключить к реобасу.
Но помните применение вентилятора с PWM в любом нештатном режиме не позволит достичь его максимальной производительности.
Применение одновременно с PWM – токового управления на постоянном токе не рекомендуется по причине снижение напряжения питания вентилятора на 10-20%, что не даст вывести такой вентилятор на полную производительность.
Применение одновременно с PWM – ШИМ по цепи питания может привести к периодической нестабильности работы вентилятора (возможно возникновение скользящих биений между частотами PWM – ШИМ по цепи питания систем) и создать неоднозначность для систем оснащенных системой стабилизации оборотов. Кроме того как и в предыдущем случае на 10-15% снизится результирующее напряжение на вентиляторе, что не даст вывести такой вентилятор на полную производительность.
Так что остановитесь на чем-то одном. Или используйте вентилятор с PWM , или применяйте внешнее управление вентилятором по цепи питания на вентиляторе с 3-pin разъемом.
Заключение
Применение PWM или ,как привыкли говорить мы, ШИМ повышает КПД понижающих напряжение устройств постоянного тока, что снижает общее тепловыделение электронных устройств с ШИМ.
ШИМ позволяет создавать компактные системы регулируемого электропривода постоянного тока большой мощности.
В современных устройствах постоянного тока управляющих напряжением и понижающих стабилизаторах напряжениях обычно регулировки выполняются с помощью ШИМ. Для этого выпускаются контроллеры требующие минимум навесных элементов.
Гасящим резисторам и реостатам сейчас можно сказать – прощай!
Уже в первых экспериментах с коллекторным моторчиком и батарейкой можно было заметить, что при частом попеременном включении и выключении электромотора частота вращения его ротора изменяется. То есть происходила регулировка скорости вращения путём периодичного включения и отключения тока через моторчик. Если изменять при этом время в подключённом состоянии и длину паузы между подключениями, можно регулировать скорость вращения мотора.
Такой же эффект проявляется практически с любым потребителем электрического тока, имеющим определённую инерцию, т.е. способным запасать энергию.
Именно этот эффект положен в основу принципа Широтно-Импульсной Модуляции (ШИМ), также встречается английское сокращение – PWM (Pulse-Width Modulation). Широтно-Импульсная Модуляция – это способ кодирования аналогового сигналa путём изменения ширины (длительности) прямоугольных импульсов несущей частоты. На Рис. 1 синим цветом представлены типичные графики ШИМ сигнала. Так как при ШИМ частота импульсов, а значит, и период (T), остаются неизменными, то при уменьшении ширины импульса (t) увеличивается пауза между импульсами (эпюра «Б» на Рис. 1.) и наоборот: при расширении импульса пауза сужается (эпюра «В» на Рис. 1.). Если сигнал ШИМ пропустить через фильтр низших частот, то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Назначение фильтра – не пропускать несущую частоту ШИМ. Сам фильтр может состоять из простейшей интегрирующей RC цепи, или же может отсутствовать вовсе, например, если оконечная нагрузка имеет достаточную инерцию. Таким образом, имея в расположении лишь два логических уровня, «единицу» и «ноль», можно получить любое промежуточное значение аналогового сигнала.
Рис.1. Зависимость напряжения от скважности ШИМ.
По принципу вышеизложенного и был разработан регулятор вентилятора. Необходимость в данном устройстве появилась, когда у ребёнка сгорела материнская плата на компьютере и пришлось поставить другую. С другим радиатором и кулером на процессор. Новый кулер был без регулятора оборотов. Для обеспечения тишины работы компьютера пришлось со своего компа снять залмовский регулятор и поставить ребёнку на компьютер, всё лучшее детям 🙂 . Теперь мой вентилятор начал шумно работать, а так как моя материнка без корпуса и просто прибита гвоздём к стенке за монитором (Рис.2.), то создавался дискомфорт при работе за компьютером. С этим надо было что то делать, что-нибудь простое и дешевое. В результате чего и родилась данная схема.
Рис.2. «Материнкой» внешний вид не испортишь.
Схема (Рис. 3.) состоит из стабилизатора на 5В, ключа, на транзисторе ВС547 (при необходимости можно поставить более мощный ключ), и самого процессора управления на PIC12F675 (Можно использовать и PIC12F629, с минимальными изменениями в программе). Управление оборотами производится кнопками S1 (убавить) и S2 (прибавить). При снятии напряжения регулятор запоминает последние выставленные обороты. Подключается регулятор к разъёму вентилятора на материнской плате. Провод оборотов вентилятора сквозной. Так как PIC12F675 имеет АЦП, то можно вместо кнопок установить переменный резистор, изначально я так и делал.
Рис. 3. Схема регулятора.
Печатную плату я не стал разрабатывать, а собрал на макетной плате. Результат на Рис. 4. При доработке регулятора начерчу печатную плату и выложу в дополнение к статье.
Теперь немного о программе. ШИМ организован программно, так как аппаратного модуля ШИМ в данном контроллере нет. После инициализации контроллера программа проверяет в EEPROM значение оборотов, на основе которой производит вычисление ШИМ. Запись в EEPROM производится после нажатия любой из кнопок управления. Чтобы не терзать память, запись в неё производится с задержкой 2-3 сек., когда установится необходимое значение оборотов.
Рис. 4. Внешний вид регулятора.
Как известно контроллер PIC12F675 не имеет интегрированного отладочного модуля. В интернете эти модули иногда ошибочно называют «переходниками». Для отладки данного типа контроллера необходим модуль AC162050. Его конечно в наличии нет, а поотлаживать очень хочется. Я в таких случаях собираю схему на отладочной плате, беру контроллер (в данном случае PIC16F877A), который поддерживает внутрисхемную отладку и пишу программу под оба контроллера одновременно. Вернее сначала под отлаживаемый контроллер (PIC16F877A), а потом изменения для основного (PIC12F675). Для того, чтобы компилятор мог определить под какой контроллер производить компиляцию имеются директивы IFDEF и ENDIF .
Ниже приведён пример конфигурации для разных контроллеров в одной программе. Компилятор сам выбирает нужный кусок, в зависимости от того, какой контроллер указан в MPLab (Configure -> Select Device). Не трудно догадаться под какой контроллер какой кусок программы относится. Строка ErrorLevel -302,-205,-207 является общей, не зависимо какой контроллер установлен.
Приведу ещё один пример инициализации контроллеров. Здесь всё, то же самое. Что находится между директив IFDEF и ENDIF , относится к определённому контроллеру, а всё остальное является общим кодом для обоих контроллеров.
В итоге получается одна программа под два вида контроллеров (можно и больше). Только не забываем указать в MPLab (Configure -> Select Device), необходимый контроллер, под который надо её скомпилировать.
Файлы для скачивания:
Список использованных ресурсов:
Компактные электрические вентиляторы, благодаря невысокой цене, используются для охлаждения оборудования уже больше полувека. Тем не менее только в последние годы технологии управления вентиляторами стали значительно развиваться. В этой статье описано как и почему это развитие имело место быть и предложены некоторые полезные решения для разработчиков.
Один из трендов электроники – это создание компактных устройств, обладающих богатой функциональностью. Поэтому большинство электронных компонентов приобретают все меньшие размеры. Один из очевидных примеров – современные ноутбуки. Толщина и вес ноутбуков значительно уменьшается, но потребляемая мощность остается прежней или увеличивается. Другой пример – проекционные системы и телевизионные ресиверы.
В ноутбуках большая часть тепла выделяется процессором, в проекторе – источником света. Это тепло необходимо бесшумно и эффективно удалять из системы. Самый тихий способ избавления от тепла – это использование пассивных охлаждающих компонентов, таких как радиаторы или тепловые трубки. Однако для многих популярных пользовательских устройств такой способ неэффективен и дорог.
Другой способ удаления тепла – это активное охлаждение с использованием вентиляторов, создающих поток воздуха вокруг нагревающихся компонентов. Однако вентилятор являются источником шума и, кроме того, увеличивает суммарное энергопотребление устройства, что может быть критично при питании от аккумулятора. Также добавление вентилятора увеличивает количество механических компонентов в системе, что отрицательно сказывается на надежности изделия.
Контроль скорости вращения вентилятора позволяет уменьшить описанные недостатки. Поскольку запуск вентилятора на меньших оборотах снижает шум и энергопотребление и увеличивает срок его службы.
Существует несколько типов вентиляторов и способов их контроля. Один из вариантов классификации вентиляторов может быть таким:
1. 2-х проводные вентиляторы
2. 3-х проводные вентиляторы
3. 4-х проводные вентиляторы
Методы управления вентиляторами, обсуждаемые в этой статье, такие:
1. управление отсутствует
2. on/ff управление
3. линейное управление
4. низкочастотная широтно-импульсная модуляция (ШИМ, PWM)
5. высокочастотное управление
2-х проводные вентиляторы имеют только выводы питания – плюс и земля. В 3-х проводных вентиляторах добавляется тахометрический выход. На этом выходе присутствует сигнал, частота которого пропорциональна скорости вращения вентилятора. 4-х проводные вентиляторы, помимо выводов питания и тахометрического выхода, имеют вход управления. На этот вход подается ШИМ сигнал и ширина импульса этого сигнала определяет скорость вращения вентилятора.
2-х проводными вентиляторами можно управлять регулируя напряжение питания или скважность ШИМ сигнала. Однако без тахометрического сигнала невозможно понять на сколько быстро вентилятор вращается. Такая форма управления скоростью вращения вентилятора называется открытым контуром (open-loop).
3-х проводными вентиляторами можно управлять аналогичным образом, но в этом случае у нас есть обратная связь. Можно анализировать тахосигнал и устанавливать требуемую скорость. Такая форма управления называется закрытым контуром (closed-loop).
Если управлять вентилятором регулируя напряжение питания, тахосигнал будет иметь форму меандра. И в этом случае тахосигнал будет всегда валидным, пока на вентиляторе есть напряжение. Такой сигнал показан на рисунке 1 (ideal tach).
При управлении вентилятором с помощью ШИМ – ситуация сложнее. Тахометрический выход вентилятора обычно представляет собой открытый коллектор. Поэтому тахосигнал будет валидным только при наличии напряжения на вентиляторе (on фаза ШИМ сигнала), а при отсутствии (off фаза) он будет подтягиваться к высокому логическому уровню. Таким образом тахосигнал становится «порубленным» управляющим ШИМ сигналом и по нему уже нельзя достоверно определять скорость вращения. Этот сигнал показан на рисунке 1 (tach).
Рисунок 1. Идеальный тахосигнал и тахосигнал при внешнем ШИМ управлении.
Для решения данной проблемы, необходимо периодически включать вентилятор на такой отрезок времени, который позволит получить несколько достоверных циклов тахосигнала. Такой подход реализован в некоторых контроллерах фирмы Analog Device, например в ADM1031 и ADT7460.
4-х проводные вентиляторы имеют ШИМ вход, который управляет коммутацией обмоток вентилятора к плюсовой шине источника питания. Такая схема управления не портит тахосигнал, в отличии от стандартной, где используется внешний ключ и коммутируется отрицательная шина. Переключение обмоток вентилятора создает коммутационный шум. Чтобы «сдвинуть» этот шум за пределы звукового диапазона частоту ШИМ сигнала обычно выбирают больше 20 кГц.
Еще одно преимущество 4-х проводных вентиляторов – это возможность задания низкой скорости вращения – до 10% от максимальной скорости. На рисунке 2 показана разница между 3-х и 4-х проводными вентиляторами.
Рисунок 2. 3-х и 4-х проводные вентиляторы
Простейший метод управления вентилятором – отсутствие какого-либо управления вообще. Вентилятор просто запускается на максимальной скорости и работает все время. Преимущества такого управления – гарантированное стабильное охлаждение и очень простые внешние цепи. Недостатки – уменьшение срока службы вентилятора, максимальное энергопотребление, даже когда охлаждение не требуется, и непрерывный шум.
Следующий простейший метод управления – термостатический или on/off. В этом случае вентилятор включается только тогда, когда требуется охлаждение. Условие включения вентилятора устанавливает пользователь, обычно это какое-то пороговое значение температуры.
Подходящий датчик для on/off управления – это ADM1032. Он имеет выход THERM, который управляется внутренним компаратором. В нормальном состоянии на этом выходе высокий логический уровень, а при превышении порогового температурного значения он переключается на низкий. На рисунке 3 показан пример цепи с использованием ADM1032.
Рисунок 3. Пример on/off управления
Недостаток on/off контроля – это его ограниченность. При включении вентилятора, он запускается на максимальной скорости вращения и создает шум. При выключении он полностью останавливается и шум тоже прекращается. Это очень заметно на слух, поэтому с точки зрения комфорта такой способ управления далеко не оптимальный.
При линейном управлении скорость вращения вентилятора изменяется за счет изменения напряжения питания. Для получения низких оборотов напряжение уменьшается, для получения высоких увеличивается. Конечно, есть определенные границы изменения напряжения питания.
Рассмотрим, например, вентилятор на 12 вольт. Для запуска ему требуется не меньше 7 В и при этом напряжении он, вероятно, будет вращаться с половинной скоростью от своего максимального значения. Когда вентилятор запущен, для поддержания вращения требуется уже меньшее напряжение. Чтобы замедлить вентилятор, мы можем понижать напряжение питание, но до определенного предела, допустим, до 4-х вольт, после чего вентилятор остановится. Эти значения будут отличаться в зависимости от производителя, модели вентилятора и конкретного экземпляра.
5-и вольтовые вентиляторы позволяют регулировать скорость вращения в еще меньшем диапазоне, поскольку их стартовое напряжение близко к 5 В. Это принципиальный недостаток данного метода.
Линейное управление вентилятором можно реализовать на микросхеме ADM1028. Она имеет управляющий аналоговый выход, интерфейс для подключения диодного температурного датчика, который обычно используется в процессорах и ПЛИС, и работает от напряжения 3 – 5.5 В. На рисунке 4 показан пример схемы для реализации линейного управления. Микросхема ADM1028 подключается ко входу DAC.
Рисунок 4. Схема для реализации линейного управления 12-и вольтового вентилятора
Линейный метод управления тише, чем предыдущие. Однако, как вы могли заметить, он обеспечивает маленький диапазон регулировки скорости вращения вентилятора. 12-и вольтовые вентиляторы при напряжении питания от 7 до 12 В, позволяют устанавливать скорость вращения от 1/2 от максимума до максимальной. 5-и вольтовые вентиляторы при запуске от 3,5 – 4 В, вращаются практически с максимальной скоростью и диапазон регулирования у них еще меньше. Кроме того, линейный метод регулирования не оптимален с точки зрения энергопотребления, потому что снижение напряжения питания вентилятора выполняется за счет рассеяния мощности на транзисторе (смотри рисунок 4). И последний недостаток – относительная дороговизна схемы управления.
Наиболее популярный метод управления скоростью вращения вентилятора – это ШИМ управление. При таком методе управления вентилятор подключается к минусой шине питания через ключ, а на управляющий вход ключа подается ШИМ сигнал. В данном случае к вентилятору всегда приложено либо нулевое, либо рабочее напряжение питания и не возникает таких энергопотерь, как при линейном методе управления. На рисунке 5 показана типовая схема реализующая ШИМ управление.
Рисунок 5. ШИМ управление.
Преимущество данного метода управления – простота реализации, дешевизна, эффективность и широкий диапазон регулирования скорости вращения. Однако недостатки у этого метода тоже есть.
Один из недостатков ШИМ управления – это «порча» тахосигнала. Этот недостаток можно устранить, используя так называемую pulse stretching технику, то есть удлиняя импульс ШИМ сигнала на несколько периодов тахосигнала. Конечно, при этом скорость вращения вентилятора может немного увеличится. На рисунке 6 показан пример.
Рисунок 6. Удлинение импульса для получения информации о скорости вращения.
Другой недостаток ШИМ управления – это коммутационный шум. Во-первых коммутация индуктивной нагрузки вызывает появление помех в цепях питания, во-вторых может возникать акустический шум – пищание, жужжание. Электрические шумы подавляют фильтрами, а для борьбы с акустический шумом частоту ШИМ сигнала поднимают до 20 кГц.
Также стоит снова упомянуть о 4-х проводных вентиляторах, в которых схема управления уже встроена. В таких вентиляторах коммутируется плюсовая шина питания, что помогает избежать проблем с тахосигналом. Одна из микросхем, предназначенных для реализации ШИМ управления 4-х проводными вентиляторами, – это ADT7467. Условная схема приведена на рисунке 7.
Рисунок 7. Схема ШИМ управления 4-х проводным вентилятором
Подводя итоги можно сказать, что наиболее предпочтительный метод управления вентилятором – это высокочастотное ШИМ управление, реализованное в 4-х проводных вентиляторах. При таком управлении отсутствует акустический шум, значительные энергопотери и проблемы с тахосигналом. Кроме того, он позволяет менять скорость вращения вентилятора в широком диапазоне. Схема ШИМ управления с коммутацией отрицательной шины обладает практически теми же достоинствами и является более дешевой, но портит тахосигнал.
ШИМ УПРАВЛЕНИЕ КУЛЕРОМ С ТЕРМИСТОРОМ
Поскольку радиолюбителям часто нужен вентилятор для охлаждения мощных усилителей, зарядок и блоков питания, решено было создать небольшой проект для этого дела. Никто не любит шум от работы кулера, поэтому нужно использовать вентилятор, который будет отключаться когда он не нужен (температура радиатора невелика). Используя широтно-импульсную модуляцию (ШИМ), а не плавно меняющееся напряжение, можно точно контролировать скорость вращения вентилятора и увеличивать её при необходимости. Для реализации этого и соберем такую схему:
Тут использован преобразователь постоянного тока, а не линейный стабилизатор, чтобы снизить 24 В до 5 В, потому что линейный LM7805 слишком нагрелся бы, гася избыточное напряжение.
Используется компаратор с гистерезисом, чтобы определить начальную точку включения вентилятора, основываясь на показаниях температуры (в омах) термистора, который установлен на радиаторе. Данный термистор меняет сопротивление от 10К при комнатной температуре до примерно 5К, когда радиатор сильно нагревается.
Хитрость этой схемы заключается в том, что управляющее напряжение (CV) от таймера 555 используется для управления ШИМ. 555 генерирует импульсы и ширина импульса, а также частота, варьируются путем подачи напряжения на вход CV. Выход 555 идет на FET, который приводит в движение кулер.
Все работает очень хорошо, но от вентилятора немного слышна низкая частота следования импульсов, поэтому нужно было использовать C4 и C5, чтобы убрать этот звук. Правда у этой конструкции есть два недостатка:
- Во-первых, нельзя регулировать на 100% ширину импульса. Минимум — около 30%, вентилятор вращается очень медленно, но максимум — около 70%.
- Другим недостатком является то, что нельзя увеличить частоту импульсов выше частоты слышимости 20 кГц, потому что тогда влияние термистора на диапазон ШИМ значительно уменьшается.
Существуют специальные контроллеры двигателей, которые позволяют решить это, на их основе сделаны две разные схемы. Один для вентилятора на 12 В и один для вентилятора на 5 В постоянного тока. Микросхема TC648 работает очень хорошо и такой ШИМ-кулер является хорошим дополнением к мощному блоку питания.
После экспериментов решено было внести несколько изменений в схему. Сначала задействовать контакт VAS. В объяснении говорится, что для него необходимо установить порог автоматического выключения, но он также устанавливает порог включения.
Во-вторых, удалим резистор, который стоял параллельно термистору NTC. Также экспериментировали с C7, который устанавливает частоту и удаляет слышимые шумы на более низких скоростях. Это работало только с ограничением 10 нФ, но тогда ограничено регулируется скорость. Поэтому остановимся на использовании значения 1 мкФ.
И вот последняя версия схемы управления вентилятором:
В самом простейшем варианте можно задействовать такую схему, но её возможности конечно сильно ограничены.
Форум
Форум по обсуждению материала ШИМ УПРАВЛЕНИЕ КУЛЕРОМ С ТЕРМИСТОРОМ
Аналоговое управление вентилятором через ШИМ
Я успешно использовал аналоговые подходы с контролем напряжения в производстве (10 кОм / мес), и у меня никогда не было проблем с регулятором. Просто эта 19-дюймовая стойка высотой 1U была чисто аналоговой с источником питания OEM 180 Вт, который UL предписывал герметизировать верхнюю часть «от утечки кокса», я выбрал крошечный термистор, прикрепленный эпоксидной смолой к горячей точке SMPS, чтобы смещать переключатель для включения вентилятора, см. Выше 45 ° C. Я вычислил значения и коэффициент усиления в электронной таблице, так что коэффициент усиления был от 0 до 100% от 45 до 55 ° C.
Возможно, вы обнаружите, что ШИМ будет работать лучше всего, но с некоторыми скоростями с некоторыми вентиляторами поставщиков, поэтому проверьте их с помощью генератора импульсов. и избегайте этой частоты ШИМ при использовании 2-контактного вентилятора.
Проблема, с которой я столкнулся, заключалась в том, что после нескольких поставок фанаты начали «застревать» и требовалось небольшое вращение для запуска, иначе они будут колебаться взад и вперед на пару градусов или просто выглядели мертвыми. Это не имело ничего общего с аналоговым или ШИМ-управлением, так как я обнаружил ошибку конструкции процесса в смещении датчиков Холла в вентиляторе. Причина в том, что максимальная мощность вентилятора контролируется выравниванием магнита датчика, а коммутация, ближайшая к реверсированию (до верхней мертвой точки), была похожа на обратный огонь в поршне, который заставлял его двигаться вперед / назад так быстро, что он стоял на месте. только в 1 или 2 стоповых положениях. Поэтому я сделал быстрый тестер отказов вентилятора с 1 секундой всего 4 секунды до остановки и проверил каждый угол запуска вентилятора 30 секунд, затем через 1 час обнаружил, что 5 из 150 вентиляторов вышли из строя. отклонил единицы.принял 145 и отправил 1 тысячу вентиляторов поставщику и отправил тестовый проект дистрибьютору и на завод по электронной почте и сказал, что если мы получим отказ еще 1 вентилятора, они потеряют наш бизнес. Это сработало. Больше никаких застрявших фанатов.
У меня ушло меньше времени на то, чтобы оформить этот стоп-приказ, протестировать 150 вентиляторов и отправить процедуру проектирования, чем на то, чтобы написать этот ответ.
Ваш драйвер не является линейным на стороне V + high, и вам может понадобиться низкая сторона с типом N. т.е. источник к земле и сток к вентилятору (-) и вентилятор (+) к 12 В или другому переключателю. Рассмотрите возможность медленного запуска при 5 В для прохладной и тихой работы.
Максимальное рассеивание мощности вентилятора снижено до 50% при половинной мощности и частоте вращения, когда драйвер рассеивает такую же мощность, поэтому закрепите с изоляцией на радиаторе или раме. В моем случае это было всего несколько ватт из 5 Вт или используйте ШИМ, если вы предпочитаете трехконтактные вентиляторы, а биты и части управления скоростью термистора обошлись мне в ~ 2 доллара дополнительных затрат по сравнению с более дешевыми двухконтактными вентиляторами с двойным турбонаддувом 1,75 дюйма.
Справочное руководство по лучшему контроллеру концентратора вентилятора с ШИМ
Не секрет, что компьютеры могут сильно нагреваться. В частности, процессоры могут быть достаточно горячими, чтобы поджарить яйцо или внутреннюю схему. Для большинства ПК одного или двух вентиляторов вместе с вентилятором графического процессора достаточно, чтобы ваш компьютер оставался прохладным. Но предположим, что у вас нет среднего ПК. Предположим, вы создаете изящную игровую машину с разогнанным процессором, двумя графическими процессорами и RGB-подсветкой? В этом случае у вас есть несколько разных вариантов.Во-первых, можно было использовать систему жидкостного охлаждения. Однако они могут быть сложными и трудными в установке. Другой вариант — добавить несколько внешних охлаждающих вентиляторов. Но это сработает только в том случае, если у вас правильный чехол.
Для большинства людей лучшим вариантом является установка нескольких внутренних вентиляторов. Но здесь есть свои препятствия. Большинство материнских плат имеют максимум два контроллера вентилятора. Если вы хотите запустить больше вентиляторов, вам понадобится дополнительный контроллер вентиляторов, чтобы подключить их все. Недавно мы рассмотрели некоторые контроллеры вентиляторов на передней панели.Эти контроллеры — отличный выбор, если вы хотите вручную управлять своими вентиляторами. Вам не нужно возиться с настройкой BIOS или запускать стороннее программное обеспечение, чтобы изменить скорость. Но они также занимают много места в корпусе и занимают 5,25-дюймовый отсек для дисковода. В зависимости от ваших настроек это может быть не идеально.
Хорошей альтернативой является использование простого контроллера концентратора вентилятора. Это компактные устройства, похожие на USB-концентратор. Но они устанавливаются внутри вашего ПК и оснащены контроллерами вентиляторов вместо USB-портов.Сегодня мы собираемся рассмотреть три лучших контроллера концентратора вентилятора с ШИМ на рынке. Прежде всего, это DeepCool Fan Hub Control. Это простой концентратор с четырьмя вентиляторами, который полностью питается от контроллера вентилятора вашей материнской платы. Далее идет Thermaltake Commander FP. Этот концентратор может управлять до 10 вентиляторами, чего достаточно, чтобы даже самая горячая игровая установка оставалась прохладной, как огурец. Наконец, мы проверим концентратор SilverStone PWM Fan Hub. Это немного меньший контроллер с 8 вентиляторами и усовершенствованной схемой для более плавной работы.
Вентиляторы с ШИМ и 3-контактные вентиляторы
Прежде чем мы пойдем дальше, важно точно понять, что такое вентилятор с ШИМ. ШИМ — это сокращение от «широтно-импульсной модуляции», электрического термина для источника питания, который пульсирует. Таким образом, вместо того, чтобы подавать на вентилятор постоянное напряжение 12 вольт, он выдает короткие быстрые импульсы каждые несколько миллисекунд. Чем дольше и быстрее импульсы, тем ближе вентилятор к полному 12 вольт. Используя этот метод, вентилятор может точно настроить свою скорость.
Итак, чем он отличается от трехконтактного вентилятора? На 3-контактный вентилятор подается постоянное напряжение.Вместо использования ШИМ вентилятор потребляет от 5 до 12 В. Чем выше напряжение, тем быстрее вращается вентилятор. Довольно просто, правда? При использовании 3-контактного вентилятора скорость обычно регулируется материнской платой или сторонним контроллером вентилятора. Чем больше нагревается ПК, тем больше мощности вентилятор получает для охлаждения.
Главное преимущество вентилятора с ШИМ-управлением не для высокопроизводительных приложений. 3-контактный вентилятор может поддерживать ваш компьютер так же прохладно, как и вентилятор с ШИМ. Преимущество приходит, когда ваш компьютер простаивает.Допустим, ваш компьютер находится в вашей спальне, и вы выключаете RGB-подсветку, чтобы спать по ночам. Внезапно вашему компьютеру не требуется столько охлаждающей способности. Большинство двигателей вентиляторов умирают, если напряжение упадет ниже 5 вольт. В результате трехконтактный вентилятор по-прежнему будет работать быстрее, чем это необходимо на неработающем ПК. С другой стороны, вентилятор с ШИМ может работать на исключительно низких скоростях, значительно ниже 500 об / мин. Это может продлить срок службы вашего вентилятора, а также сэкономить электроэнергию.
Следует отметить, что трехконтактный вентилятор по-прежнему будет работать, если вы подключите его к ШИМ-контроллеру.Однако, поскольку четвертого вывода для функции ШИМ нет, вентилятор будет постоянно потреблять 12 вольт. Другими словами, он всегда будет двигаться на полной скорости. Так что вам гораздо лучше использовать 4-контактный вентилятор на вашем 4-контактном контроллере. Вы также захотите установить уровень температуры в BIOS. В противном случае даже ваш 4-контактный вентилятор будет работать при постоянном напряжении 12 вольт. Если вы не хотите возиться с BIOS, существуют сторонние приложения, которые сделают эту работу за вас. А теперь перейдем к обзорам!
Управление концентратором вентилятора DeepCool
Система DeepCool Fan Hub Control очень компактна, имеет размер 3.4 дюйма в длину, 1,5 дюйма в высоту и 1 дюйм в толщину. Благодаря этому небольшому форм-фактору его очень легко установить практически в любом месте внутри вашего корпуса. Найдите для него подходящее место, приклейте двусторонний скотч сбоку и приклейте его к внутренней части футляра. Вам не нужно возиться с винтами или другими сложностями при установке.
Стороны ступицы слегка наклонены кверху, где вы найдете четыре порта для вентиляторов. Каждый порт помечен светло-серыми буквами «Вентилятор 1», «Вентилятор 2», «Вентилятор 3» или «Вентилятор 4».Это упрощает отслеживание того, какой вентилятор какой из вентиляторов, когда вы выполняете установку. С такой конфигурацией портов очень легко прокладывать кабели. У вас все четыре кабеля выходят с одной стороны. Так что пара стяжек — это все, что вам нужно, чтобы ваша сборка была красивой и чистой.
С одного конца устройства кабель длиной 1 фут подключается к разъему вентилятора материнской платы. Поскольку у вас работает не более четырех вентиляторов, коллектор вентиляторов будет обеспечивать достаточную мощность для работы.Благодаря этому вам не нужно использовать отдельный кабель SATA для питания ваших вентиляторов. Это не только улучшает организацию кабелей, но и означает, что вам не нужно тратить впустую кабель SATA.
Как это работает
DeepCool Fan Hub Control полагается на вашу материнскую плату для управления функцией PWM. Поэтому обязательно проверьте свой BIOS, чтобы убедиться, что настройки находятся там, где вы хотите. Имейте в виду, что вы все еще подключаетесь к материнской плате через один кабель вентилятора. В результате материнская плата сможет «видеть» только вентилятор в слоте «Fan 1».Он по-прежнему будет управлять всеми остальными вентиляторами, но будет получать информацию об оборотах от первого вентилятора. Кроме того, если у ваших вентиляторов есть термодатчики, ваша материнская плата будет видеть тепловые данные только от вентилятора 1. Если вы используете менее четырех вентиляторов, убедитесь, что один из них вставлен в слот «Fan 1». В противном случае материнская плата просто выдаст полную мощность, как если бы был подключен 3-контактный вентилятор.
Thermaltake Commander FP
Thermaltake Commander FP немного мощнее, чем DeepCool.Он имеет 3,2 дюйма в длину, 1,7 дюйма в ширину и 0,7 дюйма в толщину. Тем не менее, этот размер необходим для поддержки 10 вентиляторов, на которые он способен. Для того, чтобы запитать все эти вентиляторы, вам нужно будет использовать питание SATA. На одной стороне устройства вы увидите вход SATA для подключения к источнику питания. На другом конце кабель вентилятора длиной 30 см подключается к контроллеру вентилятора материнской платы.
Сам аппарат привлекателен на вид. Он изготовлен из черного АБС-пластика с парой тисненых логотипов Thermaltake наверху.В центре также есть синий светодиодный индикатор, который указывает, что питание SATA подключено. Сами порты для вентиляторов расположены по бокам устройства, по пять с каждой стороны. По общему признанию, прокладка кабелей может быть проблемой. Но, учитывая огромное количество кабелей, Thermaltake максимально упрощает эту задачу. В комплект входят пять многоразовых стяжек с бусинами, которые помогут вам. Но если у вас на самом деле не более 10 поклонников, вам нужно иметь под рукой еще несколько.
Вместо установки с помощью двустороннего скотча, Commander FP устанавливается с парой язычков на липучке.Это удобно, если вы хотите вынуть концентратор, чтобы легко получить доступ к некоторым портам. Он также не заклеит внутреннюю часть вашего корпуса, если вы в конечном итоге удалите или измените положение ступицы навсегда. Вы также получаете годовую гарантию производителя Thermaltake.
Как это работает
Thermaltake Commander FP работает аналогично DeepCool Fan Hub Control. У него есть единственный первичный порт, который обменивается данными с материнской платой. В данном случае это порт на материнской плате контроллера, тот, который находится в утопленном корпусе.Как и в случае с любым контроллером концентратора вентиляторов, вы должны использовать вентилятор той же марки и модели для каждого порта. Если вы используете разные марки и модели, необходимое напряжение не будет одинаковым для всех. В результате некоторые из ваших поклонников будут работать либо слишком быстро, либо слишком медленно.
Концентратор вентилятора SilverStone PWM
SilverStone PWM Fan Hub — это исключительно компактный 8-портовый вентиляторный концентратор. Он имеет длину 2,13 дюйма, ширину 1,57 дюйма и толщину 0,75 дюйма. При таком размере вы можете установить его практически в любом месте корпуса компьютера.Тем не менее, не забудьте купить липучку или двусторонний скотч. Он не поставляется с монтажными принадлежностями.
Корпус изготовлен из черного АБС-пластика, поэтому он довольно прочный. Вверху вы увидите белый логотип SilverStone. На одной стороне также имеется набор канавок, образующих смещение «Т». Восемь портов вентиляторов расположены по бокам, по четыре с каждой стороны. Такая конструкция позволяет относительно легко прокладывать кабели. С другой стороны, в комплект нет никаких застежек-молний.Вам нужно будет предоставить свой собственный.
Как и любой мощный вентиляторный концентратор, концентратор SilverStone требует входа питания SATA. Вход SATA расположен на передней панели устройства. На другом конце вы найдете разъем для контроллера вентилятора материнской платы длиной 1 фут. Подключите оба этих устройства, подключите своих поклонников, и вы готовы зажигать.
Как это работает
Если вы до сих пор обращали внимание, вы, вероятно, знаете, о чем мы собираемся сказать. Материнская плата может «видеть» только один вентилятор.В данном случае это будет вентилятор, отделенный набором канавок.
Концентратор SilverSTone PWM Fan Hub также оснащен конденсатором емкостью 2200 мкФ. Этот конденсатор будет потреблять энергию от материнской платы до тех пор, пока она не будет полностью заряжена. После этого он служит резервом мощности. Если мощность материнской платы падает, конденсатор компенсирует это, обеспечивая стабильное питание ваших вентиляторов. В результате ваши вентиляторы будут работать с надлежащей скоростью независимо от
.Окончательный приговор
Понятно, что каждому из этих контроллеров концентраторов вентиляторов с ШИМ есть что предложить.Но какой из них лучше всего подходит для вас? Если у вас всего четыре или меньше вентилятора, DeepCool Fan Hub Control — очевидный выбор. Его главное преимущество заключается в том, что вам не нужно связывать кабель SATA только для того, чтобы запустить вентиляторы. Он также прост в установке и позволяет легко прокладывать кабели. С другой стороны, если вы захотите добавить больше поклонников позже, вам не повезет.
Затем мы посмотрели на Thermaltake Commander FP. Этот вентиляторный концентратор исключительно мощный, в нем могут работать до 10 вентиляторов.Он также привлекателен, со светодиодной подсветкой наверху. С одной стороны, если у вас так много вентиляторов, организация кабелей станет проблемой. С другой стороны, расположение портов максимально безболезненно.
Наконец, мы рассмотрели концентратор SilverStone PWM Fan Hub. Втулка SilverStone не так привлекательна по сравнению с другими, но она выполняет свою работу. Вы можете использовать до восьми вентиляторов, что должно быть достаточно для любой установки. Он значительно меньше, чем ступица Thermaltake, что упрощает установку.Более того, внутренний конденсатор отлично справляется с компенсацией колебаний напряжения.
Было ли это полезно? Пожалуйста, подумайте о том, чтобы поделиться:
Как контролировать скорость вращения вентилятора процессора | Как вручную управлять вентилятором ПК
Одна из основных причин перегрева ПК — это внутренние вентиляторы, не работающие с требуемой скоростью. Часто это происходит из-за того, что автоматический контроллер вентилятора работает некорректно. К счастью, вы можете настроить скорость вращения вентилятора вручную, используя несколько различных методов.Регулировка скорости вращения вентилятора вручную также является важным шагом в разгоне процессора. В этом руководстве рассказывается, как вручную отрегулировать вентилятор процессора, а также вентиляторы любого другого корпуса.
Типы вентиляторов
Перед тем, как вносить какие-либо изменения, вам необходимо проверить, какой у вас тип вентиляторов. Вентиляторы ЦП всегда можно регулировать, но другие вентиляторы на вашем ПК могут быть не такими гибкими. Самый простой способ определить вентилятор — проверить разъем. Есть три типа вентиляторов: Molex, DC и PWM.
Вентиляторы Molex
Вентиляторы Molex отличаются плоскими четырехконтактными разъемами и прямым подключением к источнику питания.К сожалению, поскольку эти вентиляторы обходят материнскую плату, вентиляторы Molex невозможно настроить вручную.
Изображение через AmazonВентиляторы PWM и DC
С другой стороны, вы можете вручную настроить два оставшихся типа вентиляторов: DC и PWM. Чтобы обнаружить вентилятор с ШИМ, ищите небольшой четырехконтактный прямоугольный разъем, который подключается непосредственно к материнской плате.
Изображение с AmazonВентиляторы постоянного тока почти идентичны вентиляторам с ШИМ-управлением, за одним исключением. Вентиляторы постоянного тока имеют трехконтактный разъем вместо четырехконтактного.Дополнительный вывод в вентиляторах PWM делает их более энергоэффективными, повышая производительность вентилятора. При этом вы можете настроить ШИМ для работы в режиме постоянного тока, но это не рекомендуется и в большинстве случаев является переходом на более раннюю версию.
Как отрегулировать скорость вращения вентилятора с помощью UEFI
Наилучший способ отрегулировать скорость вращения вентилятора вашего ПК — это использовать унифицированный расширяемый интерфейс микропрограмм (UEFI). Конечно, все UEFI разные, но шаги, перечисленные ниже, одинаковы для каждой материнской платы.
- Перезагрузите компьютер и войдите в UEFI.
- Чтобы войти в UEFI после перезапуска, обратите внимание на инструкции на экране загрузки, в которых подробно описано, какую клавишу следует нажать для доступа к UEFI. Чаще всего помогает клавиша F2 или Del.
- В UEFI найдите параметр в главном меню, который называется Smart Fan Mode, Manual Mode, Qfan Control или что-то подобное.
- Вы поймете, что попали в нужное место, когда увидите список поклонников и график кривой.
- После того, как вы нашли график кривой вентилятора, выберите вентилятор, которым хотите управлять, и измените режим вентилятора на ручной.
Поначалу изгиб вентилятора может показаться сбивающим с толку, но когда вы освоитесь, все станет просто. В левой части графика находится число, обозначающее скорость вентилятора, а под графиком — температура в градусах Цельсия. Когда температура внутри корпуса достигает заданной температуры, скорость вращения вентилятора увеличивается.
Снимок экрана через Nichoas Wilson- Теперь отредактируйте точки на кривой вентилятора, чтобы получить желаемую кривую вентилятора.
- Сохраните настройки и перезагрузите компьютер.
Как отрегулировать скорость вращения вентилятора с помощью программного обеспечения
Если вы используете старый компьютер без UEFI или хотите более простое решение, вы можете использовать сторонние программы для достижения того же эффекта. В этом руководстве используется программа SpeedTemp. Однако такие программы, как SpeedTemp, могут не иметь доступа к вентилятору вашего процессора в зависимости от производителя вашей материнской платы, поэтому во многих случаях использование UEFI лучше.
- Откройте SpeedTemp и щелкните поле «Настроить» в правом верхнем углу.
- В меню конфигурации перейдите к Fan Control.
- Установите флажок рядом с Advanced Fan Control.
- Щелкните поле «Добавить» справа.
- Назовите контроллер вентилятора группой вентиляторов, которую вы хотите настроить.
- Выберите контролируемую скорость.
- В раскрывающемся списке выберите вентилятор, который нужно настроить.
- Выберите сумму скоростей.
- Нажмите «Добавить» в разделе «Температуры», затем добавьте датчик температуры для оборудования.
- Настройте график по своему вкусу.
- Нажмите ОК, затем вернитесь на главную страницу.
- Отключить автоматическую скорость вентилятора.
Тестирование
После того, как вы настроили вентиляторы на желаемую скорость, вы должны проверить их, чтобы убедиться, что все работает должным образом. Самый простой способ проверить — использовать UEFI. Для этого откройте свой UEFI и перейдите в раздел «Монитор». Отсюда вы можете проверить скорость вращения вентилятора и температуру.
Снимок экрана через Nichoas WilsonДля более сложных испытаний, таких как мониторинг загруженного ЦП, вы можете использовать инструмент мониторинга температуры.Open Hardware Monitor — полезный инструмент для мониторинга температуры вашего ПК и скорости вращения вентилятора.
Снимок экрана через Nichoas WilsonИ если вы хотите увидеть, как ваш компьютер реагирует на нагрузку, вы можете запустить многоядерный тест в инструменте тестирования производительности, таком как Cinebench, одновременно отслеживая температуру и скорость с помощью Open Hardware Monitor. КОНТРОЛЛЕР ВЕНТИЛЯТОРА HEMI JEEP JK PWM Extreme,
об / мин :: RPM Extreme
Описание продукта
ШИМ-КОНТРОЛЕР ВЕНТИЛЯТОРА с МОНИТОРИНГОМ ДАВЛЕНИЯ ПЕРЕМЕННОГО ТОКА
Модуль представляет собой автономную опцию для управления вентилятором PWM в стиле Chrysler, известным как вентилятор Pentastar или вентилятор Camaro PWM.Это устройство будет работать со стандартным JK или с заменой HEMI.
В настоящее время мы предлагаем несколько типов контроллеров ШИМ
.ШИМ-CAN . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора. Это устройство считывает информацию о температуре охлаждающей жидкости двигателя и давлении переменного тока с шины CAN автомобиля. Он будет использовать эту информацию для определения скорости вращения вентилятора. При включении модуля и работающем двигателе вентилятор будет работать на низкой скорости холостого хода, поскольку при увеличении температуры двигателя или давления переменного тока вентиляторам будет дана команда работать с более высоким процентом от 10 до 100%.
ШИМ-CAN-POS . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора. Этот блок также оборудован боковым входом 1 « ПОЛОЖИТЕЛЬНЫЙ «. Подача напряжения на вход 1 заставит вентилятор работать на ВЫСОКОЙ скорости .
ШИМ-CAN-НИЗКИЙ . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора. Этот блок также оборудован входом на стороне 1 ОТРИЦАТЕЛЬНЫЙ, дюймов. Вход заземления 2 заставит вентилятор работать на ВЫСОКОЙ скорости .
ШИМ-CAN-POS-POS . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора. Это устройство также оборудовано двумя боковыми входами « ПОЛОЖИТЕЛЬНЫЙ «. Подача напряжения на вход 1 заставит вентилятор работать со скоростью СРЕДНЯЯ . При подаче напряжения на вход 2 вентилятор будет работать на ВЫСОКОЙ скорости .
ШИМ-CAN-НИЗКИЙ-НИЗКИЙ . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора.Это устройство также оборудовано 2 боковыми входами ОТРИЦАТЕЛЬНЫХ дюймов. Вход заземления 1 заставит вентилятор работать на СРЕДНЕЙ скорости . Вход заземления 2 запустит вентилятор на ВЫСОКОЙ скорости .
ШИМ-CAN-POS-NEG . Этот агрегат сконфигурирован для автоматической работы с переменной скоростью вращения вентилятора. Этот блок также оборудован входами ПОЛОЖИТЕЛЬНЫЙ и ОТРИЦАТЕЛЬНЫЙ . Вход заземления 1 запустит вентилятор на СРЕДНЕЙ скорости , а подача питания на вход 2 запустит вентилятор на ВЫСОКАЯ скорость .
Вы можете заказать модуль с ПОЛОЖИТЕЛЬНЫМ , ОТРИЦАТЕЛЬНЫМ , ПОЛОЖИТЕЛЬНЫМ и ОТРИЦАТЕЛЬНЫМ , ОТРИЦАТЕЛЬНЫМ-ОТРИЦАТЕЛЬНЫМ , ПОЛОЖИТЕЛЬНЫМ-ПОЛОЖИТЕЛЬНЫМ или МОЖЕТ ТОЛЬКО
ПОЛОЖИТЕЛЬНЫЙ Стиль активируется, когда входное напряжение превышает 3 В
ОТРИЦАТЕЛЬНЫЙ Стиль активируется, когда вход заземлен
Дополнительные входы могут использоваться для переключения скоростей вентилятора для работы от переменного тока, ручного управления или других приложений.Специальное программирование может быть выполнено по запросу. Если у вас есть особый запрос, напишите нам, прежде чем совершать покупку. Пишите ЗДЕСЬ, если у вас есть вопросы или вам нужно специальное программирование
БУДУЩИЕ ВАРИАНТЫ ___________________________________________________________
Поддержка транспортных средств и поддержка фанатов будут добавлены к списку по мере их завершения. Если у вас есть что-то конкретное, чего нет в списке, не стесняйтесь связаться с нами и сообщить свои данные.
Поддержки:
ШИМ-вентиляторы Mopar Pentastar
ШИМ-вентиляторы на базе GM Camaro
Вентиляторы SPAL PWM
Техподдержка:
Додж Крайслер Джип 07-11
Додж Крайслер Джип 12-18
Простое подключение:
- зажигание SW12 вольт
- земля
- CAN +
- CAN —
- Выходной сигнал PWM FAN
Инструкции и схема будут включены.
ИНСТРУКЦИЯ
PWM против постоянного тока и автоматические режимы вентилятора для системных и корпусных вентиляторов
Если вы когда-нибудь рылись в своем BIOS, вы могли наткнуться на термины PWM, DC и Auto в разделе управления вентилятором.
В этой статье я расскажу о вентиляторах с ШИМ и постоянным током, а также о том, какие режимы использовать для эффективного охлаждения и низкого уровня шума.
ШИМ, постоянный ток и автоматический режим вентилятора
Краткий ответ — постоянный или ШИМ-режим?
Прежде чем приступить к объяснению, я сокращу его для тех, кто хочет получить быстрый ответ.
Если у вас 3-контактный разъем для вентилятора, выберите режим постоянного тока. С другой стороны, если у вас 4-контактный разъем для вентилятора, выберите режим ШИМ.
Если на коннекторе вентилятора материнской платы всего 3 контакта, выберите DC независимо от того, какой у вас вентилятор: 4-контактный PWM или 3-контактный вентилятор постоянного тока.
Если вы хотите узнать больше об этих загадочных терминах, читайте дальше!
Что такое ШИМ и как он работает?
PWM ( P ulse W idth M odulation) вентиляторы позволяют материнским платам управлять скоростью вращения вентиляторов, используя быстрые импульсы питания (циклы включения-выключения).Проще говоря, вентилятор с ШИМ выключается и включается очень быстро, чтобы работать на более низких скоростях.
Для этого типа вентилятора требуется 4-контактный разъем вентилятора, подобный показанному ниже:
Источник изображения — Dell
Как вы можете видеть на схеме контактов вентилятора PWM выше, 4-контактный разъем -й (синий) позволяет материнская плата для отправки сигнала ШИМ на вентилятор, который контролирует его скорость.
Постоянные импульсы мощности используются для изменения скорости вращения вентилятора в режиме ШИМ, что означает, что двигатель вентилятора быстро переключается из состояния ВКЛ в состояние ВЫКЛ и обратно в состояние ВКЛ.
Однако в этом режиме напряжение (12 В), подаваемое на вентилятор с ШИМ, не изменяется независимо от скорости вращения вентилятора.
Итак, график мощности вентилятора с ШИМ выглядит примерно так (называемый прямоугольной или импульсной волной) —
Видите эти всплески мощности (верблюжьи неровности) на каждом рабочем цикле? Это импульсы, которые поддерживают скорость вентилятора на уровне, необходимом для системы.
Итак, скорость вращения вентилятора 10% фактически означает, что вентилятор «включен» только 10% от общего времени работы.
Благодаря такому поведению вентиляторы с ШИМ обычно могут достигать гораздо более низких скоростей, чем их аналоги постоянного тока, при этом снижая энергопотребление.
Примечание. Некоторые премиальные вентиляторы с ШИМ могут также содержать компоненты, которые будут немного «сглаживать» этот квадратный сигнал, придавая ему наклон вверх и / или вниз при каждом обнаружении импульса.
Что такое вентиляторы постоянного тока? Как они работают?
Вентиляторы постоянного тока немного отличаются. Во-первых, они оснащены 3-контактным разъемом, подобным этому:
Как видите, распиновка 4 -й отсутствует на вентиляторах постоянного тока.
В то время как вентиляторы PWM полагаются на передачу одного и того же напряжения (12 В) через вентилятор, но быстро включают и выключают питание для достижения более низких скоростей, вентиляторы постоянного тока могут изменять скорость только путем изменения приложенного к ним напряжения .
Это означает, что вентилятор постоянного тока будет работать на полной скорости, когда к нему приложено напряжение 12 В, но будет замедляться, когда это напряжение будет, скажем, всего 7 В.
Тем не менее, эти вентиляторы все еще ограничены минимальным пороговым напряжением, необходимым для поддержания вращения вентилятора, что ограничивает минимальную скорость, которую они могут достичь.
Например, вот график, который показывает, как скорость вентилятора постоянного тока (в%) изменяется в зависимости от приложенного напряжения:
Ну, а как насчет режима АВТО?
Выбор АВТО оставит выбор материнской плате для определения и подачи правильного типа мощности на вентилятор.
Однако этот автоматический выбор МОЖЕТ быть неправильным, поэтому, если вы заметили какое-либо странное поведение скорости вентилятора, измените его вручную.
Какой режим выбрать — DC или PWM?
Вышеупомянутый раздел, вероятно, дал вам представление о том, что происходит при выборе неправильного режима для вентилятора.
Если у вас есть вентилятор постоянного тока и вы выбрали режим ШИМ на этом коннекторе вентилятора, вентилятор ВСЕГДА будет получать напряжение 12 В. У него просто нет этих 4 выводов -го для распознавания или управления импульсами, и в итоге вы получаете вентилятор, который все время работает на 100%.
Если вы заметили, что вентиляторы вашего ПК вращаются на полной скорости при запуске, прежде чем затихнуть, вот почему — на некоторых платах (в основном более старых) есть небольшая задержка при выходе из режима холодного запуска, когда к ним подается полное 12 В. заголовок вентилятора перед установкой в режим ШИМ. Это одна из причин того надоедливого «оборотов» при загрузке компьютера.
С другой стороны, что произойдет, если вы выберете режим постоянного тока для 4-контактного вентилятора PWM? Ничего особенного. Он просто работает как обычный вентилятор постоянного тока.Вы будете ограничены определенной минимальной скоростью, но в остальном она будет работать нормально.
ШИМ и шум вентилятора постоянного тока
ШИМ-вентиляторы обычно работают тише, чем вентиляторы постоянного тока, потому что иногда вы слышите больше электрических шумов в некоторых двигателях, когда они работают ниже определенного напряжения.
Более того, как я уже сказал выше, вентиляторы с ШИМ могут работать на гораздо более низких скоростях, что опять же помогает с шумом.
Вентиляторыпостоянного тока дешевле в производстве, и вы увидите, что они широко используются в системах, предназначенных для поддержания скорости вращения вентиляторов на 100%.
Серверы — отличный тому пример.
Северный радиатор | Комплект управления вентилятором PWM
{{vm.product.shortDescription}}
{{section.sectionName}}:
{{вариант.описание}}
Джоббер Цена:
{{vm.product.pricing.regularPriceDisplay}}
/ {{vm.product.unitOfMeasureDescription || vm.product.unitOfMeasureDisplay}}
Цена для вас: / {{vm.product.unitOfMeasureDescription || vm.product.unitOfMeasureDisplay}}
{{section.sectionName}} Выберите {{section.sectionName}}
.{{styleTrait.nameDisplay}} {{styleTrait.unselectedValue? «»: «Выбрать»}} {{styleTrait.unselectedValue? styleTrait.unselectedValue: styleTrait.nameDisplay}}
- Атрибуты
- Документы
- {{спецификация.nameDisplay}}
- Атрибуты
- Документы
| Марка | |
| {{attributeValue.valueDisplay}} {{$ last? »: ‘,’}} |
| Марка | |
| {{attributeValue.valueDisplay}} {{$ last? »: ‘,’}} |
Делиться
Электронное письмо было успешно отправлено.Электронное письмо не было отправлено, проверьте данные формы.
×ШИМ (вентилятор) — Kobol Wiki
Предупреждение
Всегда ВЫКЛЮЧАЙТЕ систему перед подключением / отключением вентилятора. Невыполнение этого требования может привести к повреждению управляющего GPIO из-за скачка напряжения.
PWM Введение
ШИМ или широтно-импульсная модуляция — это метод, который позволяет нам регулировать среднее значение напряжения, которое подается на электронное устройство, путем изменения рабочего цикла мощности с высокой скоростью.
Термин рабочий цикл описывает пропорцию времени «включения» к регулярному интервалу или «периоду» времени; низкий рабочий цикл соответствует низкой мощности, потому что большую часть времени питание отключено. Рабочий цикл выражается в процентах, при 100% включенном состоянии. Когда цифровой сигнал присутствует половину времени и выключен вторую половину времени, цифровой сигнал имеет рабочий цикл 50% и напоминает прямоугольную волну. Когда цифровой сигнал находится во включенном состоянии больше времени, чем в выключенном, он имеет рабочий цикл> 50%.Когда цифровой сигнал находится в выключенном состоянии больше времени, чем во включенном состоянии, он имеет рабочий цикл <50%. Вот иллюстрация, иллюстрирующая эти три сценария:
Реализация вентилятора PWM
Тип-A
Тип-B
Тип-C
Схема управления вентилятором Helios4
Версия платы 1.1
Примечания
| Описание | Заголовок J10 | Заголовок J17 | Замечания |
|---|---|---|---|
| Вывод ШИМ | гпио41 | gpio55 | 3.3В вытяжной вентилятор ТОЛЬКО ! Раннее поколение 4-проводных вентиляторов с ШИМ может использовать подтягивание 5 В |
| SENSE pin | гпио43 | гпио48 | Вывод SENSE еще не реализован |
| Частота ШИМ | 25 кГц | 25 кГц | определен в дереве устройств |
Версия платы 1.2
Примечания
| Описание | Заголовок J10 | Заголовок J17 | Замечания |
|---|---|---|---|
| Вывод ШИМ | гпио41 | gpio55 | Допуск 5В |
| SENSE pin | гпио43 | гпио48 | Вывод SENSE еще не реализован |
| Частота ШИМ | 25 кГц | 25 кГц | определен в дереве устройств |
Комплектный вентилятор
Распиновка разъема
| Штифт | Функция | Цвет провода |
|---|---|---|
| 1 | ЗЕМЛЯ | Черный |
| 2 | 12 В | Красный |
| 3 | Смысл | Желтый |
| 4 | Контроль | Синий |
Вентилятор типа A (партии 1 и 3)
Спецификация вентилятора
| Параметр | Значение | Блок | Замечания |
|---|---|---|---|
| Максимальная скорость | 4200 | об / мин | при рабочем цикле 98% |
| Минимальная скорость | 1200 | об / мин | при рабочем цикле 24% |
| Отключение | Нет | Не поддерживается | |
| Тип реализации | A |
Информация
Данные рабочего цикла преобразованы из Linux PWM
Вентилятор типа C (партия 2)
Спецификация вентилятора
| Параметр | Значение | Блок | Замечания |
|---|---|---|---|
| Максимальная скорость | 4200 | об / мин | при рабочем цикле 98% |
| Минимальная скорость | 400 | об / мин | при рабочем цикле 10% |
| Отключение | Есть | рабочий цикл <= 5.5% и перезапуск при рабочем цикле> 9% | |
| Тип реализации | С |
Информация
Данные рабочего цикла преобразованы из Linux PWM
Сравнение скорости вращения вентилятора
Датчики температуры Helios4
Датчик температуры процессора
Armada 388 включает в себя механизм управления температурой для контроля температуры кристалла. Он включает встроенный в кристалл аналого-цифровой термодатчик, который используется для определения момента достижения максимальной заданной температуры перехода процессора.
Ethernet PHY Датчик температуры
Helios4 10/100/1000 BASE-T PHY Tranceiver (Marvell 88E1512 Datasheet) оснащен внутренним датчиком температуры. Датчик сообщает температуру кристалла и обновляется примерно раз в секунду.
Датчик температуры платы
Helios4 имеет цифровой датчик температуры с 2-проводным интерфейсом (техническое описание NCT75), расположенный на нижней стороне платы. Он используется для считывания температуры окружающей среды.
Управление вентилятором PWM под Linux
Linux использует 8-битное целое число для представления рабочего цикла.Значение 0 PWM соответствует рабочему циклу 0%, а значение 255 PWM соответствует 100% продолжительности включения.
Ниже приведены графики зависимости скорости вращения вентилятора от значения ШИМ, а не рабочего цикла.
Требование исправления
В настоящее время драйвер gpio-mvebu для Linux не позволяет использовать более 1 PWM в одном банке gpio. Helios4 использует 2 PWM в одном банке, поэтому этот патч необходимо применить к исходному тексту ядра, чтобы снять ограничение.
Использование интерфейса SYSFS
Linux экспортирует механизм управления вентилятором в SYSFS под классом hwmon.Список устройств можно посмотреть в / sys / class / hwmon
ls -l / sys / класс / hwmon /
всего 0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon0 -> ../../devices/platform/soc/soc:internal-regs/f1072004.mdio/mdio_bus/f1072004.mdio-mii/f1072004.mdio-mii:00 / hwmon / hwmon0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon1 -> ../../devices/virtual/thermal/thermal_zone0/hwmon1
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon2 -> ../../devices/platform/soc/soc:internal-regs/f1011000.i2c/i2c-0/0-004c/hwmon/hwmon2
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon4 -> ../../devices/platform/j17-pwm/hwmon/hwmon4
Информация
Нумерация может отличаться от приведенного выше примера вывода. Порядок инициализации устройства зависит от того, построен ли драйвер как модуль ядра или как встроенный. Учитывайте это при использовании fancontrol
.Чтобы определить, какой hwmon принадлежит к вентилятору, найдите j10-pwm и j17-pwm . В примере выше
hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
hwmon4 -> ../../devices/platform/j17-pwm/hwmon/hwmon4
Для чтения текущего ШИМ
cat / sys / класс / hwmon3 / pwm1
кошка / sys / класс / hwmon4 / pwm1
Для установки ШИМ
эхо NEW_PWM_VALUE> / sys / class / hwmon3 / pwm1
echo NEW_PWM_VALUE> / sys / class / hwmon4 / pwm1
Fancontrol — автоматизированное программное управление скоростью вращения вентилятора
fancontrol — это сценарий оболочки для использования с lm_sensors.Он считывает свою конфигурацию из файла, затем вычисляет скорость вращения вентилятора по температуре и устанавливает соответствующие выходы ШИМ на вычисленные значения.
sudo apt-get install fancontrol
fancontrol включает сценарий pwmconfig для автоматического создания файла конфигурации, но его нельзя использовать для Helios4.
Правила UDEV
Поскольку порядок hwmon может быть изменен между версиями ядра или даже между перезагрузками, в Armbian мы используем правила udev в качестве обходного пути.Правила можно найти здесь и скопировать по адресу /etc/udev/rules.d/
./ dev / fan-j10, / dev / fan-j17, / dev / Thermal-cpu, / dev / therm-board, и / dev / therm-eth — это символические ссылки, созданные правилами udev.
Файл конфигурации
fancontrol использует файл конфигурации / etc / fancontrol . Ниже приведен пример конфигурации для управления скоростью вращения вентилятора на Helios4.
# Helios4 PWM Конфигурация управления вентилятором
# Источник температуры: / dev / Thermal-cpu
ИНТЕРВАЛ = 10
FCTEMPS = / dev / fan-j10 / pwm1 = / dev / therm-cpu / temp1_input / dev / fan-j17 / pwm1 = / dev / therm-cpu / temp1_input
MINTEMP = / dev / fan-j10 / pwm1 = 40 / dev / fan-j17 / pwm1 = 40
MAXTEMP = / dev / fan-j10 / pwm1 = 80 / dev / fan-j17 / pwm1 = 80
МИНСТАРТ = / dev / fan-j10 / pwm1 = 20 / dev / fan-j17 / pwm1 = 20
MINSTOP = / dev / fan-j10 / pwm1 = 29 / dev / fan-j17 / pwm1 = 29
MINPWM = 20
ИНТЕРВАЛ
Эта переменная определяет, с каким интервалом в секундах будет выполняться основной цикл управления вентилятором.
FCTEMPS
Сопоставляет выходы ШИМ с датчиками температуры, чтобы fancontrol знал, какие датчики температуры следует использовать для расчета новых значений для соответствующих выходов ШИМ.
Вентиляторы ( fan-j10 и fan-j17 ) управляются на основе показаний термодатчика процессора ( Thermal-cpu ).
MINSTART
Устанавливает минимальную скорость вращения вентилятора. Вы должны использовать безопасное значение, чтобы быть уверенным, что оно работает, даже когда вентилятор устареет.
Перезапуск вентилятора Type-C на 15, добавлено 5 для безопасности (в случае старения вентилятора) дает нам 20 . Значение не влияет на вентилятор типа А.
MINSTOP
Минимальная скорость вращения вентилятора. Здесь также используйте безопасное значение.
Вентилятор Type-C остановился на 24, добавив 5 для безопасности (в случае старения вентилятора), мы получим 29 . Значение не влияет на вентилятор типа А.
Следующие настройки могут быть изменены пользователем для дальнейшей настройки.
МИНТЭМП
Температура, ниже которой вентилятор переключается на минимальную скорость.
Вентиляторы (fan-j10 и fan-j17) работают на минимальной скорости, если температура процессора ниже 40 ° C.
MAXTEMP
Температура, при которой вентилятор переключается на максимальную скорость.
Вентиляторы (fan-j10 и fan-j17) работают на максимальной скорости, если температура процессора выше 80 ° C.
MINPWM
Значение ШИМ для использования, когда температура ниже MINTEMP. Обычно это будет либо 0, если вентилятор нормально останавливается, либо то же значение, что и MINSTOP, если вы не хотите, чтобы вентилятор когда-либо останавливался.Если это значение не определено, по умолчанию оно равно 0 (вентилятор остановлен).
Установите минимальное значение ШИМ на 0 . На вентиляторе типа C он останавливал вентилятор, в то время как на вентиляторе типа A он работал с минимальной скоростью.
Примечание
Файл конфигурации Helios4 fancontrol можно найти здесь.
Температурная зона в дереве устройств
В качестве альтернативы пользовательскому инструменту, такому как fancontrol, ядро Linux предоставляет Thermal Framework для управления температурным режимом.
Ниже приведен пример узлов дерева устройств, которые можно добавить в дерево устройств Helios4 для использования Linux Thermal Framework.
Примечание
В настоящее время драйвер armada_thermal (CPU Thermal Sensor) не поддерживает привязку температурных зон в дереве устройств, поэтому он пока не может использоваться в качестве термодатчика.
/ {
...
fan1: j10-pwm {
совместимый = "pwm-fan";
pwms = <& gpio1 9 40000>; / * Целевая частота: 25 кГц * /
мин-состояние охлаждения = <0>;
охлаждение-макс-состояние = <3>;
# Cool-Cells = <2>;
уровни охлаждения = <0 25 128 255>;
};
fan2: j17-pwm {
совместимый = "pwm-fan";
pwms = <& gpio1 23 40000>; / * Целевая частота: 25 кГц * /
мин-состояние охлаждения = <0>;
охлаждение-макс-состояние = <3>;
# Cool-Cells = <2>;
уровни охлаждения = <0 25 128 255>;
};
термальные зоны {
microsom_thermal: microsom-therm {
термодатчики = <& термический>;
пассивная задержка опроса = <250>; / * миллисекунды * /
задержка опроса = <500>; / * миллисекунды * /
Trips {
cpu_active: cpu_active {
/ * миллицельсий * /
температура = <40000>;
гистерезис = <2000>;
type = "активный";
};
cpu_alert: cpu_alert {
/ * миллицельсий * /
температура = <80000>;
гистерезис = <2000>;
type = "горячий";
};
cpu_crit: cpu-cris {
/ * миллицельсий * /
температура = <115000>;
гистерезис = <5000>;
type = "критический";
};
};
};
board_thermal: board-therm {
термодатчики = <& temp_sensor>;
пассивный опрос задержки = <0>; / * миллисекунды * /
задержка опроса = <1500>; / * миллисекунды * /
Trips {
board_active: board-active {
/ * миллицельсий * /
температура = <40000>;
гистерезис = <2000>;
type = "активный";
};
board_alert: board-alert {
/ * миллицельсий * /
температура = <60000>;
гистерезис = <2000>;
type = "горячий";
};
board_critical: board-critical {
/ * миллицельсий * /
температура = <70000>;
гистерезис = <2000>;
type = "критический";
};
};
Cooling-Maps {
map0 {
trip = <& board_active>;
охлаждающее устройство = <& fan1 THERMAL_NO_LIMIT 2>,
<& fan2 THERMAL_NO_LIMIT 2>;
};
map1 {
trip = <& board_alert>;
охлаждающее устройство = <& fan1 2 THERMAL_NO_LIMIT>,
<& fan2 2 THERMAL_NO_LIMIT>;
};
};
};
};
...
};
& temp_sensor {
# термодатчики-ячейки = <0>;
};
Ссылки
Широтно-импульсная модуляция
Спецификация вентиляторов с 4-проводной широтно-импульсной модуляцией (ШИМ)rev. 1,3
Справочная страницаfancontrol
Дескриптор дерева устройств Linux Thermal Framework
Последнее изменение: 7 августа 2020 г.
Контроль скорости вентилятора — ArchWiki
Управление вентиляторами может принести вашей системе различные преимущества, такие как более тихая работа системы и экономия энергии за счет полной остановки вентиляторов при низкой загрузке процессора.
Предупреждение: Настройка или полная остановка вентиляторов при высокой загрузке системы может привести к необратимому повреждению оборудования.
Обзор
Примечание. Пользователи портативных компьютеров должны знать, как работает система охлаждения в их оборудовании. Некоторые ноутбуки имеют один вентилятор для ЦП и ГП и охлаждают оба одновременно. Некоторые ноутбуки имеют два вентилятора для ЦП и ГП, но первый вентилятор охлаждает ЦП и ГП одновременно, а другой — только ЦП. В некоторых случаях вы не сможете использовать скрипт Fancontrol из-за несовместимой архитектуры охлаждения (например,грамм. один вентилятор для GPU и CPU). Вот еще немного информации по этой теме.Существует несколько рабочих решений для управления вентиляторами как для настольных компьютеров, так и для ноутбуков. В зависимости от ваших потребностей:
Fancontrol (лм-датчики)
fancontrol является частью lm_sensors, которая может использоваться для управления скоростью вентиляторов процессора / корпуса.
Возможно, ядро Linux еще не поддерживает новые материнские платы. Проверьте официальную таблицу устройств lm-сенсоров, чтобы узнать, доступны ли экспериментальные драйверы для таких материнских плат.
лм-датчики
Первое, что нужно сделать, это запустить
# датчики-обнаружение
Это обнаружит все присутствующие датчики, и они будут использоваться для fancontrol . После этого выполните следующее, чтобы проверить, правильно ли он обнаружил датчики:
$ датчики
coretemp-isa-0000 Адаптер: адаптер ISA Сердечник 0: + 29,0 ° C (высокий = + 76,0 ° C, крит = + 100,0 ° C) ... it8718-isa-0290 Адаптер: адаптер ISA Vcc: +1,14 В (мин = +0.00 В, макс. = +4,08 В) VTT: +2,08 В (мин. = +0,00 В, макс. = +4,08 В) + 3,3 В: +3,33 В (мин. = +0,00 В, макс. = +4,08 В) NB Vcore: +0,03 В (мин. = +0,00 В, макс. = +4,08 В) VDRAM: +2,13 В (мин. = +0,00 В, макс. = +4,08 В) fan1: 690 об / мин (мин = 10 об / мин) temp1: + 37,5 ° C (низкая = + 129,5 ° C, высокая = + 129,5 ° C) датчик = термистор temp2: + 25,0 ° C (низкая = + 127,0 ° C, высокая = + 127,0 ° C) датчик = термодиод
Конфигурация
После того, как датчики настроены должным образом, используйте pwmconfig (8) для тестирования и настройки управления скоростью вращения вентилятора.Следуя руководству, вы должны создать / etc / fancontrol , настраиваемый файл конфигурации. В руководстве ответы по умолчанию заключены в скобки, если вы нажмете клавишу ВВОД, ничего не вводя. Введите и , если да, n , если нет.
# pwmconfigПримечание: У некоторых пользователей могут возникнуть проблемы при использовании путей
/ sys / class / hwmon / для своего файла конфигурации. Символические ссылки устройств класса hwmon указывают на абсолютные пути и используются для группировки всех датчиков hwmon в одну папку для облегчения доступа.Иногда порядок устройств hwmon изменяется после перезагрузки, в результате чего fancontrol перестает работать. См. # Пути к устройствам изменены в / etc / fancontrol для получения дополнительной информации о том, как это исправить.
Тонкая настройка
Некоторые пользователи могут захотеть вручную настроить файл конфигурации после запуска pwmconfig с правами суперпользователя, обычно для того, чтобы что-то исправить. Чтобы вручную настроить файл конфигурации / etc / fancontrol , см. Описание переменных в fancontrol (8).
Пользователи, вероятно, столкнутся с проблемами пути hwmon , как указано выше в #Fancontrol (lm-сенсоры). См. # Пути к устройствам изменены в / etc / fancontrol для получения дополнительной информации.
Совет: Используйте опции MAXPWM и MINPWM , которые ограничивают диапазон скорости вентилятора. Подробности см. В fancontrol (8).
Примечание: Пути датчика температуры и вентилятора также могут измениться (обычно при обновлении ядра) (например, hwmon0 / device / temp1_input становится hwmon0 / temp1_input ).Проверьте статус устройства fancontrol.service , чтобы выяснить, какой путь является источником проблем, и соответствующим образом исправьте файл конфигурации.
Запуск Fancontrol
Попробуйте запустить fancontrol :
# fancontrol
Правильно настроенная установка не будет выводить ошибки и будет управлять вентиляторами системы. Пользователи должны услышать запуск системных вентиляторов вскоре после выполнения этой команды. fancontrol также можно запустить, запустив / активировав fancontrol.сервис .
Для неофициального графического интерфейса установите fancontrol-gui AUR или fancontrol-kcm AUR .
Fancontrol перестает работать после циклов приостановки-пробуждения
К сожалению, fancontrol не работает после приостановки. В соответствии с зарегистрированной ошибкой вам необходимо перезапустить fancontrol после приостановки. Этого можно добиться автоматически с помощью ловушки systemd.
NBFC
NBFC — это кроссплатформенное решение для управления вентиляторами ноутбуков.Он поставляется с мощной системой конфигурации, которая позволяет адаптировать его ко многим различным моделям ноутбуков, включая некоторые из последних.
Установка
NBFC можно установить как nbfc AUR или nbfc-git AUR . Также запустите / включите nbfc.service .
Конфигурация
NBFC поставляется с готовыми профилями. Вы можете найти их в каталоге / opt / nbfc / Configs / . При их применении используйте точное имя профиля без расширения файла (например,.грамм. какой-то profile.xml становится "какой-то профиль" ).
Проверьте, может ли NBFC что-нибудь порекомендовать:
$ конфигурация nbfc -r
Если есть хотя бы одна модель, попробуйте применить этот профиль и посмотрите, как обрабатываются скорости вращения вентилятора. Например:
$ nbfc config -a "Asus Zenbook UX430UA"Примечание: Если вы получаете
File Descriptor, который не поддерживает запись , удалите StagWare.Plugins.ECSysLinux.dll [1] и перезапустите nbfc.сервис :
# mv /opt/nbfc/Plugins/StagWare.Plugins.ECSysLinux.dll /opt/nbfc/Plugins/StagWare.Plugins.ECSysLinux.dll.old
Если вышеуказанное решение не помогло, попробуйте добавить ec_sys.write_support = 1 в параметры ядра.
Если рекомендуемых моделей нет, перейдите в репозиторий NBFC git или / opt / nbfc / Configs / и проверьте, есть ли похожие модели от того же производителя. Например, на Asus Zenbook UX430UQ конфигурация Asus Zenbook UX430UA не работала (вентиляторы полностью останавливались все время), а вот Asus Zenbook UX410UQ работал фантастически.
Запустите nbfc , чтобы увидеть все параметры. Более подробная информация о конфигурации доступна на вики-странице апстрима.
NBFC-Linux
NBFC-Linux — это облегченная реализация NBFC, написанная на C. Она не зависит от платформы Mono. Его можно установить как nbfc-linux AUR или nbfc-linux-git AUR .
Ноутбуки Dell
i8kutils — это демон для настройки скорости вращения вентилятора в зависимости от температуры процессора на некоторых ноутбуках Dell Inspiron и Latitude.Он использует интерфейс / proc / i8k , предоставляемый драйвером i8k (псевдоним для dell_smm_hwmon ). Результаты будут зависеть от конкретной модели ноутбука.
Установка
i8kutils AUR — основной пакет для управления скоростью вращения вентилятора. Кроме того, вы можете установить следующее:
- acpi — необходимо установить для использования i8kmon .
- tcl — необходимо установить для запуска i8kmon в качестве фоновой службы (с использованием параметра
--daemon). - tk — должен быть установлен вместе с tcl для работы в качестве настольного апплета X11.
- dell-bios-fan-control-git AUR — рекомендуется, если BIOS отменяет управление вентилятором.
Конфигурация
Температурные точки, при которых вентилятор меняет скорость, можно отрегулировать в том же файле конфигурации. Поддерживаются только три скорости вентилятора (высокая, низкая и выключенная). Найдите раздел, похожий на следующий:
установить конфигурацию (0) {{0} -1 55 -1 55}
установить конфигурацию (1) {{1 1} 45 75 45 75}
установить конфигурацию (2) {{2 2} 65 128 65 128}
В этом примере вентилятор запускается на низкой скорости, когда температура процессора достигает 55 ° C, и переключается на высокую скорость при 75 ° C.Вентилятор снова переключится на низкую скорость, когда температура упадет до 65 ° C, и полностью выключится при 45 ° C.
Совет: Если при запуске i8kmon с опцией подробного вывода вы заметите, что состояние изменяется (пример вывода: # (57> = 55), state = 1, low = 45, high = 75 ), но правый и левый вентиляторы сообщают о состоянии 0, вы можете подумать об изменении значения скорости для первого состояния в файле конфигурации с 1000 по умолчанию на 2000 или выше.
Установка как услуга
i8kmon можно запустить автоматически, запустив / включив i8kmon.сервис .
BIOS отменяет управление вентилятором
Некоторые новые ноутбуки имеют управление вентилятором в BIOS, которое отменяет управление вентилятором на уровне ОС. Чтобы проверить, так ли это, запустите i8kmon с подробным режимом в командной строке, убедитесь, что ЦП находится в режиме ожидания, а затем посмотрите, выключен или выключен вентилятор соответственно.
Если управление вентилятором BIOS установлено, вы можете попробовать использовать dell-bios-fan-control-git AUR :
Предупреждение: Отключение управления вентилятором в BIOS может привести к повреждению оборудования.Заранее убедитесь, что у вас правильно настроен i8kmon , или оставьте ЦП в режиме ожидания на время тестирования этой программы.
Чтобы включить управление вентилятором в BIOS:
# dell-bios-fan-control 1
Чтобы отключить управление вентилятором в BIOS:
# dell-bios-fan-control 0
BIOS управления вентилятором можно автоматически отключить, запустив / включив dell-bios-fan-control.service .
Ноутбуки ThinkPad
Некоторые демоны управления вентиляторами включают simpfand-git AUR и thinkfan AUR (рекомендуется).
Установка
Установите thinkfan AUR или thinkfan-git AUR . Необязательно, но рекомендуется установить lm_sensors. Тогда посмотрите файлы:
# pacman -Ql thinkfan
Обратите внимание, что пакет thinkfan устанавливает /usr/lib/modprobe.d/thinkpad_acpi.conf , который содержит
вариантов thinkpad_acpi fan_control = 1
Таким образом, управление вентилятором включено по умолчанию.
Теперь загрузите модуль:
# modprobe thinkpad_acpi # cat / proc / acpi / ibm / fan
Вы должны увидеть, что уровень вентилятора по умолчанию «автоматический», но вы можете повторить команду уровня в том же файле, чтобы управлять скоростью вентилятора вручную:
# уровень эха 1> / proc / acpi / ibm / fan
| Уровень | Эффект |
|---|---|
| 0 | выкл. |
| 2 | низкая скорость |
| 4 | средняя скорость |
| 7 | максимальная скорость |
| авто | по умолчанию — автоматический |
| полная скорость | реальная максимальная скорость |
Демон thinkfan сделает это автоматически.
«7» — это не то же самое, что «полная скорость». «7» — максимальная регулируемая скорость. полная скорость — максимальная нерегулируемая скорость.
Наконец, включите thinkfan.service .
Для настройки пороговых значений температуры вам необходимо скопировать пример файла конфигурации ( /usr/share/doc/thinkfan/examples/thinkfan.yaml ) в /etc/thinkfan.conf и изменить по своему вкусу. В этом файле указывается, какие датчики следует считывать и какой интерфейс использовать для управления вентилятором.В некоторых системах доступны / proc / acpi / ibm / fan и / proc / acpi / ibm / Thermal ; на других вам нужно будет указать что-то вроде:
hwmon / sys / устройства / виртуальный / термический / Thermal_zone0 / temp
, чтобы использовать стандартные датчики hwmon вместо сенсоров thinkpad.
Работает
Вы можете сначала протестировать свою конфигурацию, запустив thinkfan вручную (от имени пользователя root):
# thinkfan -n
и посмотрите, как он реагирует на уровень нагрузки других запущенных вами программ.
После правильной настройки запустите / включите thinkfan.service .
Ноутбуки ASUS
В этом разделе рассматривается настройка драйверов на ноутбуках ASUS для Fancontrol (lm-сенсоры).
Модули ядра
В файлах конфигурации мы собираемся использовать полные пути к файлам sysfs (например, / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 ). Это связано с тем, что hwmon 1 может измениться на любой другой номер после перезагрузки.Fancontrol (lm-сенсоры) написан на Bash, поэтому использование этих путей в файле конфигурации вполне допустимо. Вы можете найти полные примеры конфигурационного файла / etc / fancontrol на ASUS N550JV # Fan control.
asus-nb-wmi
asus-nb-wmi — это модуль ядра, который включен в ядро Linux и автоматически загружается на ноутбуки ASUS. Это позволит управлять только одним вентилятором, а если есть второй вентилятор, у вас не будет никакого контроля над ним.Обратите внимание, что занесение этого модуля в черный список предотвратит работу подсветки клавиатуры.
Ниже приведены команды для управления им. Проверьте, есть ли у вас какой-либо контроль над вентилятором:
# echo 255> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 # Полная скорость вентилятора (значение: 255) # echo 0> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 # Вентилятор остановлен (значение: 0) # echo 2> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора на автоматический # echo 1> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора на ручной # echo 0> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора на полную скорость
Если вы смогли изменить скорость вращения вентилятора с помощью приведенных выше команд, продолжите с # Создать файл конфигурации с помощью pwmconfig.
asus_fan
asus_fan — это модуль ядра, который позволяет управлять обоими вентиляторами на некоторых старых ноутбуках ASUS. Он не работает с самыми последними моделями.
Установите модуль ядра DKMS asus-fan-dkms-git AUR , предоставив asus_fan :
# modprobe asus_fan
Проверьте, есть ли у вас какой-либо контроль над обоими вентиляторами:
# echo 255> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1 # Полная скорость вентилятора ЦП (значение: 255) # echo 0> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1 # Вентилятор процессора остановлен (значение: 0) # echo 255> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2 # Полная скорость вентилятора GFX (значение: 255) # echo 0> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2 # Вентилятор GFX остановлен (значение: 0) # echo 2> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора процессора на автоматический # echo 1> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора процессора на ручной # echo 2> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2_enable # Изменить режим вентилятора GFX на автоматический # echo 1> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2_enable # Изменить режим вентилятора GFX на ручной # cat / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / temp1_input # Отображение температуры GFX (всегда будет 0, когда GFX отключен / не используется)
Если все работает, вы можете загрузить этот модуль ядра при загрузке:
/ etc / modules-load.d / asus_fan.conf
asus_fan
Продолжите с # Создать файл конфигурации с помощью pwmconfig.
Создайте файл конфигурации с помощью pwmconfig
Если вы получаете сообщение об ошибке Нет работающих датчиков вентилятора, все показания равны 0 при создании файла конфигурации с помощью pwmconfig , откройте первую консоль и выполните:
# watch -n 1 "echo 2> / sys / devices / platform / kernel_module / hwmon / hwmon [[: print:]] * / pwm 1 _enable"
Если вы используете модуль ядра asus_fan и у вас второй вентилятор, во второй консоли:
# watch -n 1 "echo 2> / sys / devices / platform / kernel_module / hwmon / hwmon [[: print:]]] * / pwm 2 _enable"
И, наконец, в третьей консоли:
# pwmconfig
Когда вы закончите и сгенерируете файл конфигурации, вы должны остановить первую и вторую консоли.Продолжайте с #Fancontrol (lm-сенсоры). После создания файла конфигурации вам может потребоваться вручную заменить значения PWM полными путями sysfs , поскольку они используются в этих шагах, поскольку числовые значения hwmon могут измениться после перезагрузки.
Альтернативный метод с использованием регистров EC
Если вышеуказанные методы не работают для вас, альтернативным методом является прямая запись в определенные регистры встроенного контроллера (EC). Используя инструмент EC-Probe, вы можете установить один из трех режимов скорости вращения вентилятора, если ваша модель поддерживает такую функцию в Windows.
В модели ASUS FX504GD при установке скорости вращения вентилятора на один из трех режимов используются следующие значения регистров:
# ec_probe write 0x5e 0x80 # тихий режим # ec_probe write 0x5e 0x40 # режим баланса # ec_probe write 0x5e 0xC0 # режим производительности
Здесь мы пишем в регистр 0x5e , который отвечает за установку режима скорости вентилятора.
Если эти значения не работают для вас, запустите инструмент ec-probe в режиме монитора в Windows и попытайтесь определить, какой регистр в EC изменяет значение при переключении между режимами скорости вращения вентилятора.
Установка политики теплового дросселя
Вместо ручного управления скоростью вентилятора с помощью asus-nb-wmi , также можно настроить политику теплового регулирования, чтобы иметь более или менее агрессивную политику управления вентилятором. Возможные значения: 0 (по умолчанию), 1 (избыточное ускорение) и 2 (без звука).
# echo номер > / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / throttle_thermal_policy
Режимы управления вентиляторами на некоторых ноутбуках серии TUF
На некоторых ноутбуках ASUS серии TUF производительность и режимы управления вентилятором можно изменить с помощью Fn + F5 .Текущий режим можно просмотреть, выполнив следующую команду:
$ cat / sys / устройства / платформа / asus-nb-wmi / fan_boost_mode
Вы можете увидеть, как изменяется значение, когда вы нажимаете Fn + F5 . 0 — это «нормальный режим», 1 — «режим производительности», 2, скорее всего, «тихий режим». [2] Также можно записать эти значения в файл fan_boost_mode как root и получить желаемый эффект.
Это было протестировано на моделях ASUS TUF FX504GE и ASUS TUF FX504GD и оказалось, что оно работает.
AMDGPU sysfs управление вентилятором
Драйвер ядраAMDGPU предлагает управление вентилятором для видеокарт через hwmon в sysfs .
Конфигурация ручного управления
Чтобы переключиться на ручное управление вентилятором из автоматического, запустите
# echo "1"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1_enable
Установите скорость вентилятора, например, 50% (100% — это 255 циклов ШИМ, поэтому рассчитайте желаемую скорость вентилятора в процентах, умножив ее значение на 2.55):
# echo "128"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1
Для возврата к автоматическому управлению вентилятором запустите
# echo "2"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1_enable
Предупреждение: Сброс скорости вращения вентилятора на автоматический может не работать из-за ошибки драйвера, и вместо этого может потребоваться перезапуск драйвера в качестве временного решения.
вентилятор amdgpu
Пакет amdgpu-fan AUR — это автоматический контроллер вентилятора для видеокарт с поддержкой AMDGPU, написанный на Python.Он использует «матрицу скорости» для согласования частоты вентиляторов с температурой графического процессора, например:
speed_matrix: # - [темп (* C), скорость (0-100%)] - [0, 0] - [40, 30] - [60, 50] - [80, 100]
Запустите службу управления вентиляторами, запустив / включив amdgpu-fan.service .
amdfand-bin
Тогда пакет amdfand-bin AUR является собственной альтернативой amdgpu-fan AUR . Запустите службу управления вентиляторами, запустив / включив amdfand.сервис .
сценарий fancurve
Через hwmon в sysfs предлагается не только управление вентиляторами, но и показания температуры графического процессора:
cat / sys / class / drm / card0 / device / hwmon / hwmon0 / temp1_input
Выводит температуру графического процессора в ° C + три нуля, например 33000 для 33 ° C.
Сценарий bash amdgpu-fancontrol от grmat предлагает полностью автоматическое управление вентилятором с использованием описанных функций sysfs hwmon .Это также позволяет удобно регулировать назначения циклов температуры / ШИМ и гистерезис кривой, предлагая абстрактные поля конфигурации в верхней части скрипта.
Совет: Для правильной работы скрипту необходимо как минимум три заданных назначения циклов температуры / ШИМ.
По соображениям безопасности сценарий снова устанавливает автоматическое управление вентилятором при выключении. Это может вызвать раскрутку вентиляторов, что можно обойти за счет безопасности, установив set_fanmode 1 в разделе , функция reset_on_fail .
Настройка скрипта fancurve
Для запуска скрипта рекомендуется использовать систему systemd init. Таким образом, подробный вывод скрипта можно будет прочитать через journalctl / systemctl status. Для этого в репозиторий GitHub уже включен юнит-файл .service .
Также может потребоваться перезапустить скрипт через службу root-resume.service после гибернации, чтобы он снова автоматически работал правильно:
/ и т. Д. / Systemd / system / root-resume.сервис
[Единица] Описание = Действия возобновления локальной системы После = suspend.target [Услуга] Тип = простой ExecStart = / usr / bin / systemctl перезапуск amdgpu-fancontrol.service [Установить] WantedBy = suspend.target
Устранение неисправностей
Увеличьте делитель вентилятора для датчиков
Если датчики не выдают оборотов вентилятора ЦП, может потребоваться изменить делитель вентилятора.
Первая строка выходных данных датчиков — это набор микросхем, используемый материнской платой для считывания значений температуры и напряжения.
Создайте файл в /etc/sensors.d/ :
/etc/sensors.d/fan-speed-control.conf
микросхема " coretemp-isa- *" комплект вентилятора X _div 4
Замена coretemp-isa- на имя набора микросхем и X на номер вентилятора ЦП, который необходимо изменить.
Сохраните файл и запустите как root:
# датчики -s
, который перезагрузит файлы конфигурации.
Снова запустите датчики и проверьте, есть ли показания оборотов.Если нет, увеличьте делитель до 8, 16 или 32. Ваш пробег может отличаться.
Пути к устройствам изменены в / etc / fancontrol
Перечисленные символические ссылки hwmon , расположенные в / sys / class / hwmon / , могут меняться по порядку, поскольку модули ядра не загружаются в последовательном порядке при загрузке. Из-за этого это может привести к неправильной работе Fancontrol. Ошибка: «Конфигурация устарела, запустите pwmconfig еще раз». Ошибка апстрима.
Решение
В / etc / conf.d / lm_sensors , есть 2 массива, в которых перечислены все модули, обнаруженные при выполнении команды sensor-detect . Они загружаются с помощью fancontrol. Если файл не существует, запустите sensor-detect от имени пользователя root, приняв значения по умолчанию. Откройте (или создайте) /etc/modules-load.d/modules.conf . Получите все модули, перечисленные из двух переменных в /etc/conf.d/lm_sensors/ , и поместите их в файл /etc/modules-load.d/modules.conf , по одному модулю на строку.Указание их таким образом должно привести к определенному порядку загрузки модулей, в результате чего пути hwmon останутся там, где они есть, а не изменят порядок при каждой загрузке. Если это не сработает, я настоятельно рекомендую найти другую программу для контроля ваших поклонников. Если вы не можете их найти, вы можете попробовать использовать альтернативное решение, указанное ниже.
Альтернативное решение: абсолютные пути
Использование абсолютных путей к файлам в fancontrol по умолчанию не работает, так как его вспомогательный сценарий pwmconfig запрограммирован на использование только путей hwmon для получения файлов.Это делается так, что он определяет, не изменился ли путь hwmon , указанный в его файле конфигурации / etc / fancontrol , и использует переменные DEVNAME и DEVPATH для определения такого изменения. Если ваши пути hwmon будут постоянно меняться, это предотвратит запуск fancontrol, что бы вы ни делали. Однако эту проблему можно обойти. Откройте / usr / bin / fancontrol и закомментируйте эту часть скрипта:
если! ValidateDevices "$ DEVPATH" "$ DEVNAME"
тогда
echo "Конфигурация устарела, запустите pwmconfig еще раз"> & 2
выход 1
фи
Примечание:
- Это может заставить fancontrol записывать в файлы, которые вы указали в файле конфигурации, независимо от того, что это за файл.Это может повредить файлы, если вы укажете неправильный путь. Убедитесь, что вы используете правильный путь для своих файлов.
- Также следует отметить, что при выполнении этого обходного пути использование pwmconfig для повторного создания сценария перезапишет все ваши абсолютные пути, которые вы настроили. Поэтому лучше вручную изменить старые пути на новые, если это необходимо, вместо использования pwmconfig .
Комментирование этого должно фактически игнорировать проверки hwmon .Вы также можете игнорировать переменные DEVNAME и DEVPATH в файле конфигурации. После этого замените все пути hwmon в других переменных на его абсолютный путь. Чтобы упростить задачу, повторно запустите pwmconfig с правами суперпользователя, чтобы обновить устройства hwmon . Пути hwmon в файле конфигурации теперь должны указывать на правильные абсолютные пути. Для каждого пути hwmon выполните следующую команду (где N — это перечисление пути hwmon ):
$ readlink -f / sys / class / hwmon / hwmon N / устройство
Это даст вам абсолютный путь к устройству.
Например, файл / etc / fancontrol содержит список FCTEMPS следующим образом:
FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input
Выполнение readlink -f / sys / class / hwmon / hwmon3 / device может, например, вывести /sys/devices/platform/coretemp.0/ . cd в этот каталог. Если вы видите каталог / hwmon / hwmon N /, вам нужно сделать это в файле конфигурации fancontrol , чтобы заменить путь hwmon N .Из предыдущего примера:
# ПЕРЕД FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input # ПОСЛЕ FCTEMPS = hwmon2 / pwm1 = / sys / devices / platform / coretemp.0 / hwmon / [[: print:]] * / temp1_input
По сути, вы должны заменить путь hwmon на абсолютный путь, объединенный с / hwmon / [[: print:]] * / , чтобы bash мог поймать случайное пронумерованное имя hwmon .
Если вы не видите каталог / hwmon / hwmon N /, то вам не о чем беспокоиться.Это означает, что файлы температуры находятся в корне папки устройства. Просто замените hwmon N / на абсолютный путь к файлу. Например:
# ПЕРЕД FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input #ПОСЛЕ FCTEMPS = hwmon2 / pwm1 = / sys / devices / platform / coretemp.0 / temp1_input
После замены всех путей fancontrol должен работать нормально.
.