Что такое синхронная электрическая машина. Как устроена синхронная машина. Как работает синхронный генератор и двигатель. Где применяются синхронные машины. Каковы преимущества синхронных машин.
Устройство синхронной электрической машины
Синхронная электрическая машина состоит из двух основных частей:
- Статор — неподвижная часть, на которой расположена трехфазная обмотка переменного тока (обмотка якоря)
- Ротор — вращающаяся часть, на которой находится обмотка возбуждения, питаемая постоянным током
Статор синхронной машины по конструкции аналогичен статору асинхронного двигателя. Он состоит из корпуса, сердечника из электротехнической стали и трехфазной обмотки, уложенной в пазы сердечника.
Ротор может быть двух типов:
- Явнополюсный — с явно выраженными полюсами. Применяется в тихоходных машинах (50-1000 об/мин).
- Неявнополюсный — с неявно выраженными полюсами. Используется в быстроходных машинах (3000-1500 об/мин).
Принцип действия синхронного генератора
Принцип работы синхронного генератора основан на явлении электромагнитной индукции:

- Обмотка возбуждения ротора питается постоянным током и создает магнитное поле.
- При вращении ротора от приводного двигателя его магнитное поле пересекает проводники обмотки статора.
- В обмотке статора индуцируется трехфазная система ЭДС.
- При подключении нагрузки в обмотке статора протекает ток.
Частота ЭДС и тока в обмотке статора пропорциональна скорости вращения ротора.
Принцип действия синхронного двигателя
Принцип работы синхронного двигателя основан на взаимодействии магнитных полей статора и ротора:
- Обмотка статора создает вращающееся магнитное поле при питании от трехфазной сети.
- Обмотка ротора питается постоянным током и создает неподвижное относительно ротора магнитное поле.
- Поле статора увлекает за собой поле ротора, заставляя его вращаться синхронно.
- Ротор вращается с той же скоростью, что и магнитное поле статора.
Применение синхронных машин
Основные области применения синхронных электрических машин:
- Синхронные генераторы — основной источник электроэнергии на электростанциях
- Синхронные двигатели большой мощности (от 100 кВт)
- Синхронные компенсаторы — для улучшения коэффициента мощности в электросетях
- Синхронные преобразователи частоты
- Синхронные реактивные двигатели малой мощности
Преимущества синхронных машин
Основные достоинства синхронных электрических машин:

- Высокий КПД (до 98-99%)
- Возможность работы с высоким коэффициентом мощности
- Стабильная скорость вращения вне зависимости от нагрузки
- Способность генерировать реактивную мощность
- Возможность регулирования напряжения в широких пределах
Типы и конструкции синхронных машин
По конструкции ротора различают следующие типы синхронных машин:
- Явнополюсные — с явно выраженными полюсами на роторе. Применяются в гидрогенераторах, тихоходных двигателях.
- Неявнополюсные — с неявно выраженными полюсами. Используются в турбогенераторах, быстроходных двигателях.
- С постоянными магнитами — вместо обмотки возбуждения используются постоянные магниты. Применяются в микромашинах.
По способу возбуждения выделяют:
- Машины с электромагнитным возбуждением — наиболее распространенный тип
- Машины с возбуждением от постоянных магнитов
- Машины с самовозбуждением (питание обмотки возбуждения от выпрямленного тока статора)
Характеристики синхронных машин
Основные характеристики синхронных электрических машин:
- Номинальная мощность
- Номинальное напряжение
- Номинальный ток
- Частота вращения
- Коэффициент полезного действия
- Коэффициент мощности
- Ток возбуждения
- Напряжение возбуждения
Важными характеристиками также являются:
- Внешняя характеристика генератора
- Угловая характеристика двигателя
- U-образная характеристика
- Характеристика холостого хода
Регулирование синхронных машин
Основные способы регулирования синхронных машин:
- Регулирование возбуждения — изменение тока в обмотке ротора позволяет регулировать напряжение генератора и коэффициент мощности двигателя.
- Регулирование частоты вращения приводного двигателя — позволяет изменять частоту генерируемого напряжения.
- Регулирование угла нагрузки — изменение механического момента на валу машины.
Регулирование синхронных машин осуществляется с помощью систем автоматического регулирования возбуждения и частоты вращения.
Заключение
Синхронные электрические машины являются важнейшим типом электрических машин, широко применяемым в энергетике и промышленности. Их основные преимущества — высокий КПД, стабильная скорость вращения и возможность работы с высоким коэффициентом мощности. Благодаря этому синхронные машины незаменимы в качестве генераторов электроэнергии на электростанциях и двигателей большой мощности.

Устройство и принцип действия синхронной машины
Устройство синхронных машин.
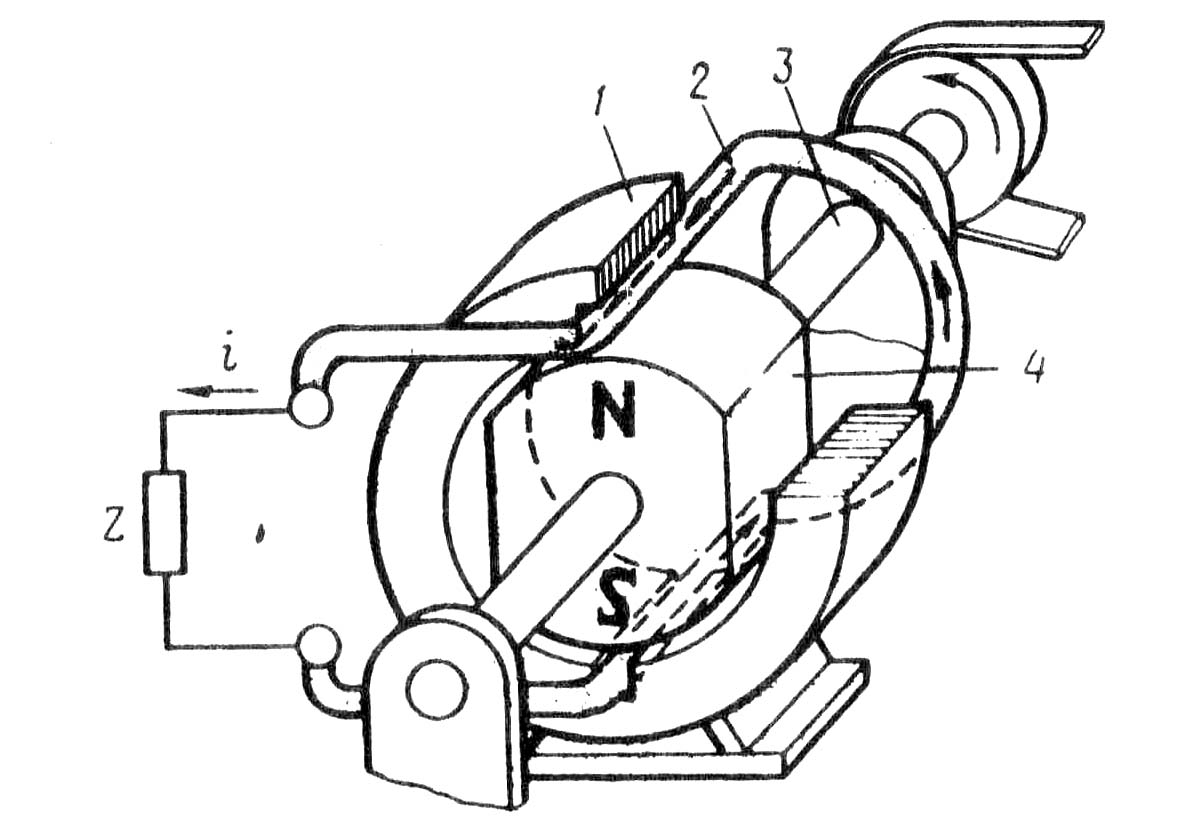
Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора, выполняющего функции якоря и ротора, вращающегося внутри статора и служащего индуктором (рис. 4.1).
Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем.
В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами.
Роторы с явно выраженными полюсами (рис. 4.1) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительноечисло полюсов. Конструктивно роторы этого типа (рис. 4.2) состоят из вала 6, ступицы 7, полюсов 8, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах.
Поверхность полюсного наконечника полюсов имеет такой профиль, что магнитная индукция в воздушном зазоре машины распределяется примерно по синусоидальному закону. Для быстроходных машин (турбогенераторы, синхронные двигатели, турбокомпрессоры и т. п.) явнополюсная конструкция ротора неприменима из-за сравнительно большого диаметра ротора и возникающих в связи с этим недопустимо больших центробежных сил.
Большей механической прочностью обладает ротор с неявно выраженными полюсами. Он состоит (рис. 4.3) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному.
Принцип работы и ЭДС синхронного генератора.
Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 4.4).
При вращении ротора синхронного генератора от проводного двигателя ПД с постоянной частотой nо магнитное поле ротора, пересекая проводники фазных обмоток статора AX, BY, CZ (рис.4.4,а) наводит в них ЭДС , где B – магнитная индукция в воздушном зазоре между статором и ротором; l
Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону , где — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике .
Обозначив, получим , т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя – см. п. 3.8.1). Действующее значение ЭДС одной фазы определяется выражением:
где – обмоточный коэффициент; – частота синусоидальных ЭДС; — число витков одной фазы обмотки статора; — число пар полюсов; – максимальный магнитный поток полюса ротора; – синхронная частота вращения.
Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 1200, и их ЭДС образуют симметричную трёхфазную систему.Изменяя ток возбуждения , можно регулировать магнитный поток ротора и пропорциональную ему ЭДС генератора. На рис. 4.5 представлена зависимость , снятая при номинальной частоте вращения .
Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферромагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком и током возбуждения , что обусловлено явлением насыщения магнитной системы машины.
Принцип действия и вращающий момент синхронного двигателя.
Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. Вращающееся поле статора с полюсами N и S создается при питании обмоток статора от трёхфазной сети аналогично вращающемуся полю асинхронного двигателя (на рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой
Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения против часовой стрелки. Тогда полюсы ротора и будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора и (см. штрихованные линии на рис. 4.6).
В режиме идеального холостого хода (момент сопротивления ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы и, которые не создают ни вращающего момента, ни момента сопротивления.
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления , ось ротора и его полюсов , сместится в сторону отставания на угол (рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие и создают вращающий момент , где — радиус ротора.
Машина работает в двигательном режиме, её вращающий момент преодолевает момент сопротивления механической нагрузки.
При увеличении момента механической нагрузки на валу ротора угол увеличивается (до некоторого предела), что приводит к увеличению вращающегося момента двигателя , причем частота вращения ротора остается неизменной и равной .
Противодействующий момент и противо-ЭДС.
При работе синхронной машины в режиме нагруженного генератора (на схеме рис. 4.4,б нагрузка Zн подключена к обмоткам статора через выключатель Q) по обмоткам статора протекает ток, который создает своё вращающееся магнитное поле. В генераторном режиме, в отличие от двигательного режима, полюсы ротора опережают на угол полюсы магнитного поля статора.
В результате взаимодействия разноименных полюсов статора и ротора на ротор действует момент, направленный против вращения, т.е. тормозной момент . В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя: .
При работе синхронной машины в режиме двигателя поле ротора пересекает витки трехфазной обмотки статора и в ней индуцируется ЭДС, которая согласно правилу Ленца действует навстречу току статора. По этой причине её называют противо-ЭДС. В установившемся режиме противо-ЭДС почти полностью уравновешивает напряжение сети .
Таким образом, при работе синхронной машины на нагрузку (электрическую или механическую) в обмотке статора индуцируется ЭДС Е и возникает момент ротора .
Реакция якоря в синхронной машине.
Реакция якоря – это воздействие поля якоря (статора) на магнитное поле машины. При работе синхронной машины на нагрузку (электрическую в режиме генератора и механическую в режиме двигателя) по обмоткам статора (якоря) протекают синусоидальные токи, которые создают вращающееся магнитное поле статора. Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора , где — число пар полюсов машины.
Частота вращения магнитного поля статора .
Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
Рассмотрим реакцию якоря на примере двухполюсного синхронного генератора с неявно выраженными полюсами ротора, работающего на различную по характеру нагрузку .
При активной нагрузке с сопротивлением R ЭДС фазы обмотки статора и её ток совпадают по фазе и достигают максимума в тот момент, когда ось mm1 магнитного потока ротора Ф0 перпендикулярна оси nn1 катушки обмотки статора (например, АX на рис. 4.7,а).
Магнитный поток статора Фя замыкается по сердечникам статора и ротора через воздушный зазор. Таким образом, в случае активной нагрузки ось потока ротора Ф0 опережает ось потока статора Фя на электрический угол, равный 900 (поперечная реакция якоря).
При этом результирующий магнитный поток машины (ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
При чисто индуктивной нагрузке XL ток в обмотке статора отстаёт от ЭДС на 900 и поэтому достигает максимума в тот момент времени, когда полюс ротора повернётся на 900 по направлению вращения (рис. 4.7,б). В этом случае магнитный поток статора оказывается направленным навстречу магнитному потоку ротора и размагничивает машину ().
При емкостной нагрузке XC ток в фазе статора опережает ЭДС на 900 и поэтому достигает максимума в тот момент, когда полюс ротора не доходит на 900 до оси mm1 (рис. 4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ().
При работе синхронной машины в режиме двигателя ток в статоре при том же направлении вращения имеет противоположное направление. Ось результирующего потока двигателя оказывается повернута относительно потока ротора на угол , но не против направления вращения, как у генератора, а по направлению вращения.
Таким образом, реакция якоря в синхронной машине изменяет как поток машины, так и его направление (в отличие от асинхронной машины, у которой ). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора.
Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
Синхронные машины | Электрические машины
Страница 22 из 51
Конструкция, назначение и области применения синхронных машин
Синхронной машиной называется электрическая машина переменного тока, у которой частота вращения ротора n находится в строгом соответствии с частотой сети :
.
На статоре синхронной машины располагается трехфазная обмотка переменного тока, называемая обмоткой якоря, а на роторе располагается обмотка постоянного тока, называемая обмоткой возбуждения. Существует две основных разновидности исполнения обмоток возбуждения: распределенные и сосредоточенные. Распределенные обмотки применяются при неявнополюсной конструкции ротора (рис. 5.1). В каждом пазу располагается только одна сторона катушки. Поэтому такая обмотка является однослойной. Число катушек на полюсном делении равно . Они соединяются последовательно, образуя полное число витков обмотки возбуждения
,
где — число витков в катушке.
Неявнополюсную конструкцию ротора имеют быстроходные синхронные машины с и . Частота вращения ротора таких машин при соответственно равна 3000 и 1500 . Для получения необходимой механической прочности неявнополюсные роторы выполняются из массивной стальной поковки.
В машинах с ротор имеет явнополюсную конструкцию (рис. 5.2). Обмотка возбуждения таких машин выполняется сосредоточенной в виде катушек (1) и размещается на сердечниках полюсов (2). Для закрепления катушек на полюсах используются полюсные наконечники (3). Все катушки соединяются последовательно, образуя полное число витков обмотки возбуждения
.
Для улучшения динамических свойств синхронной машины в полюсные наконечники помещают дополнительную короткозамкнутую обмотку (4), выполняемую аналогично короткозамкнутой обмотке асинхронной машины. Ее называют успокоительной или демпферной. Иногда роль демпферной обмотки выполняют массивные полюсные наконечники.
Основная область применения синхронных машин — энергетика, где они используются в качестве генераторов электрической энергии. В зависимости от типа привода синхронные генераторы делятся на турбогенераторы, гидрогенераторы и дизельные генераторы.
Турбогенераторы приводятся во вращение быстроходными паровыми или газовыми турбинами. Это и обусловливает конструкцию турбогенераторов. Ротор турбогенератора имеет неявнополюсное исполнение (рис. 5.1) с горизонтальным расположением оси вращения. Предельный диаметр ротора по условию механической прочности составляет . Активная длина ротора достигает . Максимальная мощность, развиваемая такими турбогенераторами при , составляет 1200 мВт.
Гидрогенераторы приводятся во вращение гидротурбинами. В зависимости от напора воды и мощности турбины частота вращения гидрогенераторов колеблется в пределах от 50 до . Поэтому гидрогенераторы являются тихоходными машинами с числом пар полюсов
.
Для размещения такого числа полюсов приходится увеличивать диаметр ротора до при длине . Гидрогенераторы выполняются обычно с вертикальной осью вращения вала. Гидротурбина располагается под генератором. Максимальная мощность современных гидрогенераторов достигает 800 МВт.
Дизельные генераторы приводятся во вращение двигателями внутреннего сгорания. Они имеют сравнительно небольшую мощность (до 10 МВт) и используются для питания автономных потребителей. Дизельные генераторы имеют явнополюсную конструкцию ротора при числе полюсов и выполняются с горизонтальным расположением вала.
Наряду с генераторным режимом широко используется и двигательный режим синхронных машин, применяемых в качестве двигателей для привода мощных насосов, компрессоров, воздуходувок и других крупных установок.
Одним из основных достоинств синхронных машин является способность генерировать реактивную мощность. Существует даже специальный тип синхронных машин, предназначенных исключительно для генерирования реактивной мощности. Такие машины называются синхронными компенсаторами. Синхронные компенсаторы выпускаются на мощность от 15 до 160 при частотах вращения . Роторы таких машин имеют явнополюсное исполнение.
Принцип действия и устройство электрических машин переменного тока. Синхронные машины
Машины переменного тока по устройству несколько отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока, у машин переменного тока на статоре обычно укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения.
Синхронными называют такие машины переменного тока, у которых скорость вращения ротора и частота переменного тока в обмотках изменяются одновременно и пропорционально друг другу, т. е. синхронно. С изменением частоты тока у таких машин одновременно (синхронно) меняется число оборотов.
Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т.е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота сети переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток — фаз, сдвинутых относительно друг друга на 120° (1/3 периода) с таким расчетом, чтобы индуктируемая э.д.с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э.д.с. соседней фазы. Обмотку возбуждения укладывают на роторе и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный на одном валу с синхронным генератором, или аккумуляторная батарея.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмоток статора отходят три провода (три контакта). Продольный разрез синхронного генератора трехфазного переменного тока с возбудителем показан на рис. 172.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемого постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магнитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
На рис. 173, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду. При соединении в треугольник начало первой фазы I соединяется с концом II, начало II — с концом III и начало III — с концом I.
При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности. За последние годы на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. При этом схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на клеммах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор работал в режиме двигателя, нужно отключить первичный двигатель и к фазным обмоткам статора подвести трехфазный ток из сети.
В этом случае генератор станет синхронным Электродвигателем, потребляющим ток. Проходя по фазным обмоткам, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же скоростью, как вращающееся магнитное поле. При этом генератор не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование скорости вращения ротора синхронного двигателя производится изменением частоты тока сети, а изменение направления вращения ротора — переключением двух любых фаз, т.е. взаимным пересоединением двух питающих проводов.
Похожие статьи
HydroMuseum – Явнополюсная синхронная электрическая машина
Явнополюсная синхронная электрическая машина
Явнополюсная синхронная электрическая машина – гидрогенератор, ротор которого имеет явнополюсную конструкцию.
Схема синхронной машины показана на рисунке. Синхронная машина отличается от асинхронной тем, что ток в обмотке ротора появляется не при вращении ее в магнитном поле статора, а подводится к ней от постороннего источника постоянного тока. Статор синхронной машины выполнен так же, как и асинхронной, и на нем обычно расположена трехфазная обмотка. Обмотка ротора образует магнитную систему с тем же числом полюсов 2р, что и у статора. Она создает магнитный поток возбуждения и называется обмоткой возбуждения. Вращающаяся обмотка ротора соединяется с внешней цепью источника постоянного тока с помощью контактных колец и щеток. При вращении ротора с частотой n2 его магнитное поле возбуждения наводит в статоре ЭДС E1, частота которой
f1=p*n2/60
При подсоединении обмотки статора к нагрузке протекающий по ней ток будет создавать магнитный поток, частота вращения которого
n1=60f1/p
Из сравнения этих выражений видно, что п1 =n2 т. е. магнитные поля статора и ротора вращаются с одинаковой частотой, поэтому такие машины называются синхронными.
Рис. 1. Схема синхронной машины:
В — обмотка возбуждения, Uв — напряжение в цепи возбуждения
Результирующий магнитный поток создается совместным действием обмоток возбуждения и статора и вращается с той же частотой, что и ротор.
Обмотка якоря в синхронной машине — обмотка, в которой индуцируется ЭДС и к которой присоединяется нагрузка.
Индуктор в синхронной машине — часть машины, на которой расположена обмотка возбуждения.
В схеме на рисунке статор является якорем, а ротор — индуктором, но может быть и обращенная схема, в которой статор — индуктор и ротор — якорь.
Синхронная машина может работать генератором или двигателем.
В машине с неподвижным якорем применяются две разновидности ротора: явнополюсный ротор имеет явно выраженные полюсы, неявнополюсный ротор не имеет явно выраженных полюсов.
Постоянный ток в обмотку возбуждения синхронной машины может подаваться от специального генератора постоянного тока, установленного на валу машины и называемого возбудителем, или от сети через полупроводниковый выпрямитель.
Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами.
Синхронные двигатели применяются при мощности более 600 кВт и до 1 кВт как микродвигатели.
Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения. Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Синхронные машины
Если во вращающемся магнитном поле разместить на валу ротора магнит так, чтобы ось, соединяющая его полюса, была направлена вдоль вектора индукции магнитного поля, то вращающееся магнитное поле вовлекает во вращение магнит вместе с валом ротора, который вращается синхронно с магнитным полем. Однако для этого необходимо раскрутить ротор до скорости вращения поля (условие синхронизма). На ротор действует вращающий момент, и энергия тока превращается в механическую энергию электродвигателя, который получил название синхронного.
Синхронные машины используются в качестве источников электрической энергии (генераторов), электродвигателей и синхронных компенсаторов.
Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника питания.
Синхронные двигатели переменного тока используются с механизмами средней и большой мощности при редких пусках, требующих постоянной частоты вращения. К таким механизмам относятся компрессоры, вентиляторы, насосы и т.д.
Синхронный компенсатор предназначается для улучшения коэффициента мощности электротехнических установок (компенсации индуктивной реактивной мощности).
Схема замещения синхронного двигателя и векторная диаграмма
На рисунке Xc — синхронное индуктивное сопротивление; θ — угол нагрузки
В соответствии со схемой уравнение имеет вид:
Характеристика зависимости момента двигателя от угла нагрузки имеет вид синусоиды и выражает работу как двигательного, так и генераторного режима.
С целью получения запаса устойчивости за номинальный момент синхронного двигателя принимается 0,5Мн, которому соответствует угол θ=30°.
Конструкция
Конструктивно синхронная машина состоит из статора и ротора. Статор аналогичен статору асинхронной машины, а ротор представляет собой постоянный магнит, поле которого создается обмоткой возбуждения, по которой пропускается постоянный ток. Питание обмотки возбуждения осуществляется через скользящий контакт между контактными кольцами и неподвижными щетками. Особенностью синхронной машины является возможность работы как в режиме двигателя, так и в режиме генератора.
Частота ЭДС переменного тока в синхронной машине зависит от частоты вращения ротора и числа пар полюсов, f1 = рn/60. Действующее значение ЭДС, индуцируемой в проводниках
Е = 4,44fKобмWФо.
Взаимодействие вращающегося поля статора и поля постоянного магнита ротора вызывает появление вращающего момента, вследствие чего ротор вращается в том же направлении, что и поле статора (n1=n). Скольжение синхронной машины равно нулю.
Важным преимуществом синхронного двигателя является способность регулировать потребляемую из сети реактивную мощность путем изменения тока возбуждения. Рассмотрим зависимости тока статора двигателя от тока возбуждения.
При перевозбуждении Iдв имеет емкостной характер, а при недовозбуждении — индуктивный. Таким образом, синхронный двигатель может быть использован в качестве компенсирующего устройства для регулирования реактивной мощности.
Характеристики имеют границу устойчивости, вдоль которой уменьшение тока возбуждения приведет к опрокидыванию двигателя или «выпаданию из синхронизма». Граница устойчивости соответствует режиму Мдв=Мген.
Недостатком синхронного двигателя является необходимость возбудителя для запуска, так как при равенстве синхронной частоты вращения поля статора и частоты вращения поля ротора пусковой момент отсутствует. Наиболее распространен асинхронный запуск. В этом случае на полюсах двигателя размещается короткозамкнутая обмотка. При пуске статор подключают к сети. Возникающее магнитное поле индуцирует в этой обмотке ЭДС и токи, в результате чего создается электромагнитный момент, как и у асинхронного двигателя. При этом обмотка возбуждения отключена от источника постоянного тока, но замкнута на активное сопротивление с целью уменьшения напряжения на ее зажимах при пуске. При достижении двигателем частоты вращения, близкой к синхронной, обмотка возбуждения переключается на источник постоянного тока. В этом случае говорят, что двигатель «втянулся в синхронизм».
Генераторный режим синхронной машины
Так как выражения электромагнитной мощности и момента у синхронной машины аналогичны и в двигательном и в генераторном режимах, то достаточно рассмотреть генераторный режим синхронной машины.
При работе синхронной машины в качестве генератора можно регулировать магнитный поток Ф0 и пропорциональную ему Е0, изменяя ток возбуждения.
Зависимость Е0=f(Iв) называется характеристикой холостого хода генератора.
Остаточная ЭДС у синхронного генератора равна 5-10 В.
Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке,
При включении статора на сопротивление нагрузки по обмотке пойдет ток, который создаст поле, вращающееся относительно статора и неподвижное относительно поля возбуждения основного потока ротора Ф0. Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке, при индуктивной ток отстает на 90°, при емкостной опережает на 90°. Рост напряжения при емкостной нагрузке связан с подмагничивающим действием реакции якоря (статора), а снижение при индуктивной нагрузке — размагничиванием.
Упрощенное уравнение электрического состояния одной фазы синхронного генератора без учета поля рассеяния якоря имеет вид:
где Е0 — ЭДС холостого хода.
Данному выражению соответствуют схема замещения (рис. а) и векторная диаграмма (рис. б). Из диаграммы следует, что Е0 соответствует магнитному потоку ротора Ф0, а напряжение U — результирующему магнитному потоку Ф. Отсюда следует, что в генераторном режиме Ф0 опережает Ф на угол θ.
Основной режим работы генератора нагрузочный. Пренебрегая потерями в сопротивлении обмотки якоря, получим из векторной диаграммы значение cosψ между напряжением и Е0:
С учетом этого выражения получим зависимость для определения электромагнитной мощности:
Момент равен отношению мощности к частоте вращения:
Выражение в скобках соответствует максимальному моменту Мmax, причем.
Зависимости электромагнитной мощности и момента синхронной машины при различных токах возбуждения показаны на рисунке.
В синхронном генераторе с активно-реактивной нагрузкой при определении электромагнитного момента необходимо учитывать фазовый сдвиг тока относительно магнитного потока или напряжения. Тогда выражение для момента
Синхронный генератор в качестве источника электрической энергии переменного тока включают в распределительную сеть параллельно. При параллельной работе генератора с системой большой мощности его частота и напряжение, а также угловая скорость должны оставаться неизменными при любых изменениях как нагрузки, так и тока возбуждения и момента первичного двигателя. Активную мощность, отдаваемую генератором в сеть, можно регулировать только изменением момента первичного двигателя, а реактивную — изменением тока возбуждения.
Синхронные машины | Ремонт электрических машин | Обладнання
Страница 3 из 15
2.3. Синхронные машины
Синхронные машины широко применяются в качестве генераторов электрической энергии, например на электрических станциях. Синхронные двигатели используются для привода компрессоров, насосов, преобразовательных агрегатов и т. д. Двигатели, которые работают без нагрузки на валу, применяют в качестве источника реактивной мощности и называют синхронными компенсаторами.
В автоматике используют синхронные микродвигатели мощностью от долей ватта до нескольких сотен ватт.
Характерной особенностью синхронных машин является то, что в установившемся режиме работы скорость ротора равна угловой скорости магнитного поля.
Синхронная машина имеет две обмотки. Одна из них (обмотка возбуждения) подключается к источнику постоянного тока и создает основное магнитное поле машины. Вторая является обмоткой якоря и состоит из одной, двух или трех фаз. Наиболее распространены трехфазные обмотки якоря. В обмотке якоря индуцируется основная электродвижущая сила (ЭДС) машины.
Обычно в синхронных машинах обмотка якоря расположена на статоре, а обмотка возбуждения — на роторе. Иногда в машинах небольшой мощности обмотка якоря находится на роторе, а обмотка возбуждения — на полюсах статора. На практике преобладает первая конструкция, поскольку в этом случае к скользящему контакту ротора подводится мощность возбуждения, которая составляет лишь 0,3 — 3 % номинальной мощности машины.
Сердечник статора синхронной машины состоит из отдельных пластин электротехнической стали толщиной 0,5 мм (рис. 2.7). На внутренней поверхности статора имеются пазы для укладки обмотки якоря. При внешнем диаметре менее 1 м сердечник собирается из цельных кольцевых пластин (рис. 2 7, а) и при большем диаметре каждое кольцо составляют из отдельных пластин, которые называют сегментами (рис. 2.7, б). Сердечник закрепляется в станине (корпусе) статора. В пазы статора, которые обычно имеют прямоугольное сечение, укладывают двухслойные петлевые обмотки, а в крупных машинах — одно-витковые стержневые волновые обмотки.
Рис. 2.7. Листы сердечника статора синхронной машины: а — штампованные листы статорной стали небольших машин, б — штампованные листы (сегменты) статорной стали крупных машин; 1 — электротехническая сталь; 2 — лак или бумага
По исполнению ротора синхронные машины разделяют на явнополюсные и неявнополюсные.
Явнополюсный ротор синхронной машины (рис. 2.8) имеет выступающие полюса, сердечник которых в машинах большой мощности набирают из пластин конструкционной стали толщиной 0,5 — 1 мм.
В машинах небольшой мощности полюса крепятся болтами к валу, а в тихоходных — к ободу ротора.
В крупных и относительно быстроходных машинах полюса крепят к ободу ротора с помощью Т-образных или ласточкиных хвостов.
Обмотки возбуждения располагают на полюсах. В полюсных наконечниках размещают пусковую (демпферную) обмотку, изготовленную из крупных прутков латуни. Стержни этой обмотки по торцам замыкают пластинами или кольцами, образуя короткозамкнутые клетки.
Явнополюсные роторы применяют в машинах большой мощности с относительно низкой частотой вращения, а значит с большим числом полюсов.
Неявнополюсные роторы используют в синхронных машинах большой мощности с высокой частотой вращения (3000, 1500об/мин), например в синхронных турбогенераторах, а также быстроходных синхронных двигателях, которые применяются, в частности, для привода турбокомпрессоров.
Рис. 2.8. Явнополюсный ротор синхронной машины:
1 — ротор с полюсами и катушками; 2 — полюс с пусковой (демпферной) обмоткой; 3 — обмотка возбуждения полюса
Большинство синхронных машин имеет электромагнитное возбуждение. Источником постоянного тока для обмотки возбуждения являются специальные системы возбуждения: электромашинная и вентильная. В системе возбуждения используется специальный генератор постоянного тока (возбудитель), мощность которого составляет 0,3 -3 % мощности синхронной машины. Возбудитель обычно соединяется с валом синхронной машины. Величина тока возбуждения регулируется в цепи возбуждения возбудителя.
Вентильные системы возбуждения имеют три разновидности: с самовозбуждением, с независимым возбуждением, с бесщеточным возбуждением.
В настоящее время широко применяются синхронные машины с постоянными магнитами: микродвигатели, генераторы и двигатели малой мощности, тахогенераторы. В этих машинах вместо обмотки возбуждения используют постоянные магниты, которые в большинстве случаев располагают на роторе. Конструкция статора остается неизменной.
В синхронных двигателях, кроме постоянных магнитов, на роторе размещают пусковую короткозамкнутую обмотку.
Синхронные машины, как и асинхронные, изготовляют сериями. Для автономных установок, где в качестве первичного двигателя применяют двигатели внутреннего сгорания, выпускают синхронные генераторы серий ЕСС, СГД, СГН мощностью 6,25 — 156кВ-А при напряжении 400 В и 500 — 4000кВ-А при напряжении 6,3 кВ.
Номинальные частоты вращения генераторов 500, 1000, 1500 об/мин.
В синхронных электроприводах используют синхронные двигатели серий СД и СДН мощностью 75 — 125 кВт при напряжении 380 В и 400 — 10 000 кВт при напряжении 6кВ.
Синхронные двигатели серий СДН, СДНЗ (315 — 4000 кВт, 6кВ) предназначены для привода насосов, мельниц, дымососов и других механизмов с небольшими маховыми массами, которые не требуют регулирования частоты вращения. Обычно двигатели работают в закрытых помещениях с регулируемыми климатическими условиями. Степень защиты двигателей серии СДН — IP00, серии СДНЗ — IP44.
Двигатели этих серий изготавливают со станиной на лапах, с двумя стояковыми подшипниками скольжения, с горизонтальным размещением вала и одним свободным цилиндрическим концом. Корпус статора сварной, из листовой стали. Между пакетами сердечника статора имеются радиальные каналы для циркуляции охлаждающего воздуха. Температура подшипников контролируется с помощью термометров сопротивления.
Двигатели серий СДН, СДНЗ допускают прямой асинхронный пуск при номинальном напряжении сети. Из холодного состояния с интервалами не менее 5 мин возможны два пуска, из горячего состояния допускается только один пуск. При этом средний статический момент сопротивления не должен быть больше 0,4 номинального момента. Общее число пусков не может превышать 500 в год.
Возбуждение, управление пуском и остановом двигателей осуществляется от тиристорных возбудителей типа ТЕ8-320. Синхронные двигатели серий СДК, СДКП, СДКМ (315 — 800 кВт, 6 — 10 кВ) предназначены для привода компрессоров. Двигатели серии СДКП применяют во взрывоопасных помещениях. Для привода аммиачных поршневых компрессоров предназначены двигатели серии СДКМ.
Исполнение двигателей — горизонтальное, консольное (ротор насаживается на консольный конец вала компрессора).
Изоляция обмоток статора и ротора по нагревостойкости соответствует классу В.
Возбуждение двигателей осуществляется от тиристорных возбудителей на напряжение 380 В, которое получают от согласующего трансформатора.
Пуск двигателей асинхронный, непосредственно от сети при полном напряжении с разгруженным компрессором.
Синхронные явнополюсные двигатели серии СДМЗ (1600 -4000 КВт, 6кВ) предназначены для привода шаровых и стержневых мельниц в продолжительном режиме работы в закрытых помещениях с регулируемыми климатическими условиями. Двигатели имеют степень защиты IP44, горизонтальный вал, два стояковых подшипника скольжения с комбинированной смазкой.
Вентиляция принудительная по замкнутому циклу через воздухоохладители, установленные на фундаментной плите.
Возбуждение двигателей осуществляется от тиристорных возбудителей типа ТЕ8-320/150 и ТЕ8-320-230. Возможны два пуска подряд из холодного состояния или один пуск из горячего состояния при среднем статическом моменте 0,8 номинального. Следующий цикл возможен только через 2 ч. В год допускается до 500 пусков.
Синхронные двигатели серии СДМП2 (400 — 800 кВт, 6кВ) используются для привода шаровых и стержневых мельниц, установленных в помещениях со взрывоопасной средой. Режим работы S1, климатическое исполнение и категория размещения УХЛ4, степень защиты IP43. Система вентиляции включает отдельный вентилятор. Возбуждение от тиристорного возбудителя типа ТВ300Р-УХЛ4. Подшипники скольжения имеют кольцевую смазку.
Синхронные явнополюсные двигатели серии ДСЗ (12 500 -22 000 кВт, 6 — 10 кВ) предназначены для привода преобразовательных агрегатов. Они имеют закрытое исполнение с самовентиляцией по замкнутому циклу через воздухоохладители, которые устанавливают в фундаментной яме; степень защиты IP43. Конструкция двигателей позволяет сдвигать статор на полную длину ротора для профилактических осмотров и ремонтов, включая замену элементов обмотки статора и ротора без разборки двигателей. Возбуждение двигателей тиристорное.
Синхронные явнополюсные вертикальные двигатели серии ВДС (4000 — 16000 кВт, 6 — 10 кВ) применяются для привода насосов на крупных оросительных системах и магистральных каналах при подаче воды до 40м3/с и напоре 25 — 65 м.
Синхронные неявнополюсные двигатели серий СТД и ТДС (630 -31500 кВт, 6-10 кВ) используются для электроприводов нефтяных насосов и газовых компрессоров на компрессорных станциях магистральных нефте- и газопроводов, газовых компрессоров химического производства, водяных насосов при добыче нефти и др.
Двигатели выполняют с замкнутыми и разомкнутыми циклами вентиляции, на фундаментных плитах с двумя стояковыми подшипниками и одним рабочим концом вала, с массивной бочкой ротора, в пазы которой заложена обмотка возбуждения. Изоляция обмотки возбуждения — класса нагревостойкости В. Вентиляторы расположены с обеих сторон бочки ротора.
Подшипники скольжения смазываются под давлением. Двигатели этой серии могут запускаться непосредственно от сети. В случае больших моментов инерции пуск производят при пониженном напряжении с помощью пускового тиристорного устройства. Для питания обмотки возбуждения синхронных двигателей серии СТД применяют тиристорные возбудители серии ВТЕ 320-6. Возбудители подсоединяют к сети через трансформатор.
1. Как устроен синхронный двигатель?
2. Виды возбуждения синхронных машин.
3. Какие бывают серии синхронных машин и их особенности.
4. Чем различаются явнополюсные и неявнополюсные синхронные машины?
5. Где располагается пусковая обмотка синхронного двигателя? Как она выполняется?
6. Какие типы тиристорных возбудителей применяются в синхронных машинах?
7. Чему равна скорость ротора синхронной машины в установившемся режиме работы?
8. Как выполняется обмотка возбуждения синхронного двигателя?
9. В каких синхронных машинах применяют постоянные магниты?
10. Для привода каких промышленных механизмов используют синхронные двигатели?
Синхронная машина
Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре.
1. Устройство
Основными частями синхронной машины являются якорь и индуктор обмотка возбуждения. Как правило, якорь располагается на статоре, на отделённом от него зазором роторе находится индуктор — таким образом, по принципу действия синхронная машина представляет собой как бы «вывернутую наизнанку» машину постоянного тока, переменный ток для обмотки якоря которой не получается с помощью коллектора, а подводится извне.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора.
Индуктор состоит из полюсов — электромагнитов постоянного тока или постоянных магнитов в микромашинах. Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При не явнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками так называемый большой зуб. Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса.
Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока, применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную набранную из отдельных листов конструкцию из электротехнической стали.
2.1. Принцип действия Генераторный режим
Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря 0.3.2%, подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочерёдно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространённом случае применения трёхфазной распределенной обмотки якоря в каждой из фаз, смещённых друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трёхфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей.
Частота индуцируемой ЭДС f {\displaystyle f\,\!} соотношением:
n = 60 f p {\displaystyle n={\frac {60f}{p}}},
где p {\displaystyle p\,\!} — число пар полюсов статора, в зависимости от нагрузки машины меняется лишь угол нагрузки угол тета — электрический угол отставания или опережения поля возбуждения по отношению к полю якоря. При угле нагрузки более 90 электрических градусов машина выпадает из синхронизма — останавливается, если вал перегружен тормозным моментом, либо уходит на повышенные обороты, если машина работает в режиме генератора и недогружена электрической нагрузкой.
Синхронные двигатели при изменении возбуждения меняют косинус фи с ёмкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт воздуходувки, водоперекачивающие и нефтеперекачивающие насосы, к примеру, типа СТД, при меньших мощностях обычно применяется более простой и надёжный, в том числе в запуске, асинхронный двигатель с короткозамкнутым ротором.
3. Разновидности синхронных машин
Гидрогенератор — явнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от гидравлической турбины при низких скоростях вращения, 50 — 600 мин –1.
Турбогенератор — неявнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от паровой или газовой турбины при высоких скоростях вращения ротора — 6000 редко, 3000, 1500 об/мин.
Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу в режиме холостого хода; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения коэффициента мощности или в режиме стабилизации напряжения. Дает индуктивную нагрузку.
Машина двойного питания в частности АСМ — синхронная машина с питанием обмоток ротора и статора токами разной частоты, за счёт чего создаются несинхронные режимы работы.
Ударный генератор — синхронный генератор как правило, трёхфазного тока, предназначенный для кратковременной работы в режиме короткого замыкания КЗ.
Сельсин — маломощная синхронная машина, используемая как датчик угла поворота либо в паре с другим сельсином для передачи угла поворота без прямой механической связи.
Также существуют безредукторные, шаговые, индукторные, гистерезисные, бесконтактные синхронные двигатели.
3.1. Разновидности синхронных машин Бесконтактная синхронная машина
В классической синхронной машине имеется слабое место — контактные кольца со щётками, изнашивающиеся быстрее других частей машины из-за электроэрозии и простого механического износа. Кроме того, искрение щёток может стать причиной взрыва. Поэтому сначала в авиации, а позже и в других областях в частности, на автономных дизель-генераторах получили распространение бесконтактные трёхмашинные синхронные генераторы. В корпусе такого агрегата размещены три машины — подвозбудитель, возбудитель и генератор, их роторы вращаются на общем валу. Подвозбудитель — синхронный генератор с возбуждением от вращающихся на роторе постоянных магнитов, его напряжение подаётся в блок управления генератором, где выпрямляется, регулируется и подаётся в обмотку статора возбудителя. Поле статора наводит в обмотке возбудителя ток, выпрямляемый размещённым на валу блоком вращающихся выпрямителей БВВ и идущий в обмотку возбуждения генератора. Генератор уже вырабатывает ток, идущий к потребителям.
Такая схема обеспечивает как отсутствие иных механических частей в двигателе, кроме подшипников, так и автономность работы генератора — всё время, пока генератор вращается, подвозбудитель даёт напряжение, которое может быть использовано для питания цепей управления генератором.
- асинхронизированная синхронная машина разновидность машины двойного питания Основным отличием АСМ от обычной синхронной машины является наличие двух
- асинхронизированная синхронная машина Один из вариантов БМДП имеет конструкцию, в которой в одном корпусе собраны, практически, 2 синхронные машины Статор имеет
- мощности или частоты Основная статья: Синхронная машина Синхронная машина — это такая электрическая машина переменного тока, в которой частота вращения
- скольжения. Синхронная машина — электрическая машина переменного тока, в которой частоты вращение ротора и магнитного поля в зазоре равны. Машина двойного
- Бесщёточный синхронный генератор — синхронная машина работающая только в генераторном режиме, ротор которой не имеет коллекторно — щёточного узла, а ток
- одновременно со съёмкой изображения. В результате синхронной съёмки может быть получена синхронная фонограмма, точно совпадающая с экранным действием
- Архивировано 16 ноября 2006 года. Векторное управление Синхронная машина Машина двойного питания Машина постоянного тока Универсальный коллекторный двигатель
- Вентильный реактивный электродвигатель ВРД — это бесколлекторная синхронная машина на обмотки статора которой подаются импульсы напряжения управляемой
- Синхронная машина Являются элементами пассивной компенсации реактивной мощности, иными словами, при использовании некоторого количества синхронных двигателей
- двигатель с экранированными полюсами — однофазная асинхронная или синхронная электрическая машина в которой для создания пускового момента используется короткозамкнутая
- неконструктивный элемент системы — программу логику управления. Синхронная машина используемая в ВД, состоит из шихтованного собранного из отдельных
- обратного преобразования двигатель Машина постоянного тока обратима. Машина постоянного тока образуется из синхронной обращённой конструкции, если её якорь
- Основная статья: Электрическая машина Электрический двигатель — электрическая машина электромеханический преобразователь в которой электрическая энергия
- электрические машины Электродинамика Механика Теплофизика Электромеханический преобразователь, электрическая машина обобщённая электрическая машина вращающееся
- Синхронный автоматический перевод Speech — to — Speech Real — Time Translation — моментальный машинный перевод речи, с одного естественного языка на другой
- смысле паровая машина — любой двигатель внешнего сгорания, который преобразует энергию пара в механическую работу. Первая паровая машина построена в XVII веке
- Цифровая система возбуждения — микропроцессорная система возбуждения синхронных машин Предназначена для автоматического управления возбуждением регулируемым
- останова синхронной машины при запуске машины ОВ закорочена на разрядный резистор и машина под действием напряжения, поданного на статор у синхронных двигателей
- генератор выполняется в виде двухполюсной синхронной машины с воздушным охлаждением. Отличаются от обычных синхронных генераторов, рассчитанных на длительную
- Определения определяет якорь как часть коллекторной машины постоянного тока или синхронной машины переменного тока, в которой индуктируется эдс и протекает
- 1992, Киев — изобретатель автоматических регуляторов возбуждения синхронных машин основоположник теории статической устойчивости энергосистем, моделируемых
- Основные уравнения неустановившегося режима синхронной машины в 1950 году — Переходные процессы синхронной машины Сталинская премия второй степени 1948
- назначения, дымососы. Завод был основан как завод по производству синхронных электрических машин В 1976 году начато производство асинхронных двигателей, выпуск
- Выправочно — подбивочно — отделочная машина — путевая машина непрерывного действия, выполняющая за один проход комплекс работ: дозировку и уплотнение балласта
- создание магнитного потока в двигателе постоянного тока или синхронной машине — синхронном двигателе, сельсине и др. Возбуждение физиология — в физиологии
- диссертации Синтез структуры системы автоматического регулирования синхронных машин Автор научных работ в области теории автоматического регулирования
- теории параметров и режимов синхронных машин Он провёл подробный анализ физических явлений в контурах синхронной машины сопровождающих внезапное короткое
- может располагаться как на статоре машины в машине постоянного тока, МПТ так и на роторе в синхронной машине в этом случае якорем служит статор
- электродвигателей, например: линейные асинхронные электродвигатели ЛАД линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические
- Испытания стрельбой показали высокую эффективность данной боевой машины Положительную реакцию машина вызвала у комиссии, возглавляемой начальником ГАБТУ Маевым
Синхронная машина: синхронная машина это, синхронные машины применение, явнополюсные и неявнополюсные синхронные машины, синхронная машина с демпферной обмоткой, синхронные машины реферат, классификация синхронных машин, явнополюсная синхронная машина, синхронный генератор
Явнополюсные и неявнополюсные синхронные машины.
Асинхронизированная синхронная машина. Ботвинник М.М. Синхронная машина превращается в синхронный двигатель, в котором и поле статора и поле ротора ротор будут вращаться с одинаковой скоростью. Синхронные машины реферат. §3.1. Синхронная машина с электромагнитным возбуждением. Синхронная машина, переменного тока машина обычно трёхфазная, частота вращения которой n жестко связана с частотой сети f соотношением n.
Классификация синхронных машин.
Управление синхронным двигателем с постоянными магнитами. Асинхронная машина электрическая машина переменного тока, частота вращения ротора которой не эквивалентна частоте. Явнополюсная синхронная машина. Синхронная машина патент РФ 2069441 Казуо Накано. Тока должны возбуждаться постоянным током. Но в то время как в генераторах постоянного тска применяется самовозбуждение, синхронные машины. ГОСТ 27471 87 Машины электрические вращающиеся. Термины. Синхронная машина может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор.
Диссертация на тему Синхронная машина с несимметричным.
Synchronous Reluctance Machine, СРД. В последнее время на эти электрические машины все больше обращают внимание производители двигателей,. Синхронные машины теория Механизмы и технологии. Синхронные машины. 1. Важное место в теории синхронных машин занимает работа синхронной машины, присоединенной к сети, которая питается. 11. Синхронные машины Синхронными называются. МОДЕЛЬ СИНХРОННОЙ МАШИНЫ С ПОСТОЯННЫМИ МАГНИТАМИ. Название модуля: PMSM1. Краткое описание: модуль моделирует работу.
Синхронные машины. Принцип дейсивия.Назначение и области.
Явнополюсная синхронная машина гидрогенератор с косвенным ох лаждением: пряжение обмотки якоря статора синхронных машин выбирается. Синхронные реактивные двигатели СРД КоСПА. Для этого синхронный двигатель механически соединяется со вспомогательным двигателем постоянного тока либо трехфазным индукционным. Назначение и устройство синхронных машин Школа для. Synchronous Machine. Смоделируйте динамику трехфазного круглого ротора или существенно полюсной синхронной машины. Библиотека. Simscape. Электрические машины. Том 2. Любая синхронная машина состоит из двух главных частей: По конструкции статор синхронной машины принципиально не.
Синхронные машины – это электрические машины переменного.
Синхронная машина, предназначенная для генерирования или потребления Асинхронная машина с фазным ротором, у которой обмотки статора и. АСИНХРОННАЯ МАШИНА И ЕЕ РЕЖИМЫ РАБОТЫ. Синхронная машина это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре. Явнополюсная синхронная электрическая машина HydroMuseum. Характерным для явнополюсных синхронных машин является неравенство магнитных сопротивлений по продольной d и поперечной q осям машины R. ГОСТ IEC 60050 411 2015 сертификации. СИНХРОННЫЕ МАШИНЫ С ПОСТОЯННЫМИ МАГНИТАМИ. Назначение. Машины с постоянными магнитами позволяют уменьшить потери в машине,.
Особенности конструирования и анализа высокооборотных.
Синхронные машины: Учебное пособие. а 4Читать бесплатно книгу онлайн без регистрации в электронном виде на сайте полнотекстовой. Бесконтактная синхронная машина Патентный поиск. Патент СИНХРОННАЯ МАШИНА ПОСТОЯННОГО ТОКА Бауков Николай Александрович RU, Наумов Вениамин Валентинович RU. Издано:.
Неведомый С А Синхронный двигатель.
Синхронная машина переменного тока, у которой скорость ротора при постоянной частоте тока в обмотках статора сохраняется постоянной. Н.И. Задоя ЭЛЕКТРИЧЕСКИЕ МАШИНЫ рубцовский. Возбуждение синхронных машин может производиться за счет электромагнитного воздействия или же постоянного магнита. В случае. ВЕРОЯТНОСТНО СТАТИСТИЧЕСКИЕ МЕТОДЫ. It provides mathematical description of the synchronous machine with anisotropic magnetoconductance of rotor, as well as the relationship for the electromagnetic. Синхронная машина с анизотропной магнитной проводимостью. Der Synchronmotor. Библиотека Главная. 6 Синхронный двигатель. 6.1 История развития синхронной машины.
Синхронная машина с общей ступенью устройства возбуждения.
Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что. Принцип действия синхронной машины Синхронные машины. Синхронный двигатель с постоянными магнитами англ. permanent magnet synchronous motor, PMSM это синхронный электродвигатель, индуктор.
Виртуальный 3D конструктор Синхронная машина ГС 10 400.
При этом синхронная машина работает при перевозбуждении, и реактивная мощность поступает в сеть. Синхронные машины, назначением которых. SU31501A1 Самовозбуждающаяся синхронная машина. Синхронная машина электрическая машина переменного тока с частотой вращения ротора равной частоте вращения магнитного поля в зазоре,. Синхронная машина с постоянными магнитами. МЕТОДЫ ИДЕНТИФИКАЦИИ СИНУСОИДАЛЬНО ВОЗРАСТАЮЩИХ ПЕРЕХОДНЫХ ПРОЦЕССОВ СИНХРОННЫХ МАШИН. 1. Авторы Резюме. Синхронные машины: возбуждение, устройство, принцип. Устройство явнополюсной синхронной машины. Page 3. 3. Любая синхронная машина состоит из двух основных частей: неподвижного статора и.
Синхронный двигатель: принцип работы, устройство, назначение.
СИНХРОННЫЕ МАШИНЫ. § 97. Общие сведения. В синхронных машинах число оборотов ротора равно числу оборотов вращающегося магнитного. Синхронные машины. Рассмотрены особенности конструкции электрических машин с постоянными СИНХРОННАЯ МАШИНА SYNCHRONOUS MACHINE ПОСТОЯННЫЕ.
Асинхронизированная синхронная машина Карта знаний.
Статор 1 синхронной машины рис 1 1, а выполнен так же, как и асинхронной: на нем расположена трехфазная в общем случае многофазная. Конструкция синхронных машин электротехнический форум. Явнополюсная синхронная электрическая машина – гидрогенератор, ротор которого имеет явнополюсную конструкцию. Схема синхронной машины. Конструктивные схемы и принцип действия синхронной машины. Синхронна машина перевод в словаре болгарский русский.
Синхронная машина. Большая Советская Энциклопедия СИ.
Устройство синхронных машин. Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора,. Синхронный электродвигатель: характеристики, устройство и. PA Leningrad Electric Machine Engineering Plant Ltd LEZ is the largest manufacturer of alternating current electric machines with capacity range from 100 to. Синхронный двигатель с постоянными магнитами. Перевозбужденная синхронная машина, работающая в режиме холостого хода, относительно сети эквивалентна емкости. Машину, специально.
явнополюсные и неявнополюсные синхронные машины, синхронная машина с демпферной обмоткой
Асинхронный двигательи синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора.Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила генерируется, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит, главным образом, от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
.N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машиной. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы. В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Гистерезисный двигатель использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали.Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора.Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.Компьютер управляет последовательным включением питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается.Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя.Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство асинхронных двигателей сегодня содержат вращающийся элемент (ротор), названный беличьей клеткой.Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора.Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором.Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила генерируется, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит, главным образом, от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные соотношения.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцируемого в нем напряжения, f r , падает. Если f — частота напряжения статора, то скольжение, с, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № м
, где Н, = количество проводников под одним полюсом статора (обычно мало для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу.Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателей
Синхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Существует два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем с переключаемым сопротивлением, содержит ротор, отлитый из стали, который имеет выемки или зубцы, называемые выступающими полюсами.Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы перемещать ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, что заставляет значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
Ремонт синхронных двигателей
Синхронные двигатели
Синхронные двигатели — это двигатели переменного тока, скорость вращения вала которых пропорциональна частоте тока — фактически, прямо пропорциональна. с технической точки зрения это означает, что период вращения двигателя будет равен целому числу циклов переменного тока. Скорость его вращения фактически привязана к частоте сети.
Наряду с асинхронным двигателем, синхронный двигатель является одним из наиболее широко используемых типов двигателей переменного тока.Однако он работает иначе, чем асинхронный двигатель. В отличие от асинхронного двигателя, синхронный двигатель не требует индукции тока для создания магнитного поля вокруг ротора. Одним из преимуществ использования синхронного двигателя является то, насколько эффективно он может преобразовывать энергию переменного тока в полезную работу по сравнению с другими типами электродвигателей.
Общие типы ремонта синхронного двигателя
Существует несколько различных видов ремонта, из которых три наиболее часто выполняемых ремонта синхронных двигателей — это перемотка катушек, повторная изоляция катушек и устранение проблем с балансировкой ротора и несоосностью.
Перемотка катушек синхронного двигателя
Процесс перемотки, если он выполнен правильно, представляет собой очень детальный процесс, который начинается с тщательного осмотра, который включает в себя размеры, крепления и изоляцию катушки. Затем обмотки очищаются с помощью печи с регулируемой температурой и водяным фильтром. Затем данные обмотки собираются и анализируются, и (в зависимости от того, к кому вы обращаетесь в ремонт) будут предложены улучшения конструкции. На протяжении всего процесса намотки проводятся подробные электрические испытания, чтобы гарантировать целостность обмотки, строго соблюдая стандарты IEEE.
Повторная изоляция катушек синхронного двигателя
Когда выполняется повторная изоляция (часто как часть процесса перемотки), она начинается с тщательной оценки действующей системы изоляции. Создана новая система изоляции с упором на улучшение теплопередачи и диэлектрической целостности. Изоляция наносится с точностью в зависимости от конструкции, а затем используется процесс пропитки под вакуумом (VPI), чтобы пропитать обмотки и покрыть их слоем эпоксидной смолы без растворителей объемом от 4 до 5 мл.
Устранение дисбаланса и центровки синхронных двигателей
Как дисбаланс, так и несоосность могут стать серьезными проблемами для электродвигателей. Балансировка ротора, также называемая динамической балансировкой, обычно начинается со сбора данных о вибрации. Одним из основных выполняемых тестов является анализ спектра вибрации с помощью быстрого преобразования Фурье (БПФ). Что делает этот тест, так это предоставляет данные для корреляции амплитуды вибрации с частотой. Это не только дает полезную информацию о характере вибрации и может ли она быть связана с проблемой конструкции, дисбалансом или несоосностью вала.Другие возможные причины включают дефекты подшипников, обрыв сварных швов, ослабление крепления, неисправности ротора / статора и условия резонанса. Анализ вибрации — отличный инструмент для их определения!
Синхронные двигателии асинхронные двигатели
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя — это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории, двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания.Тем не менее, обе эти категории по-прежнему содержат много видов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (наша статья о бесщеточных и щеточных двигателях постоянного тока посвящена широким типам двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье дается краткое объяснение обоих, а также сравниваются их рабочие характеристики и области применения.
Двигатели асинхронные
Асинхронные двигателисчитаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности.Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции для создания механического вращения. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей — пропустить переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока не совпадает напрямую с числом оборотов выходного вала.Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие скольжения означает, что с асинхронными двигателями трудно установить точное время. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже большом механизированном промышленном оборудовании, поскольку они бывают сотен скоростей, крутящих моментов, напряжений, размеров и форм. Для получения дополнительной информации об этих машинах, узнайте больше в нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя обычно более дорогие, чем асинхронные, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье дается общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
|
Характеристики |
Асинхронные двигатели |
Синхронные двигатели |
|
Сложность |
Простой дизайн |
Комплекс |
|
Самозапускающийся |
В целом да |
Обычно нет |
|
Плотность мощности |
Среднее значение |
Высокая |
|
КПД |
Среднее значение |
Высокая |
|
Регулятор коэффициента мощности |
Нет (всегда с запаздыванием) |
Да (может опережать и отставать) |
|
Стоимость |
Низкий |
Высокая |
Сложность (или ее отсутствие) асинхронных двигателей — лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные — нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности — это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя над асинхронным.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает меньшие потери энергии при преобразовании электрической энергии в механическую.
Коэффициент мощности — это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электрический счетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели работают в паре с асинхронными двигателями для коррекции индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, описанным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Сводка
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Строительство трехфазных синхронных машин
Генератор состоит из двух частей: статора и ротора.Статор — это неподвижная часть машины, а ротор — это вращающаяся часть машины. Статор несет обмотку якоря, в которой генерируется напряжение, и выходной сигнал снимается с нее. Ротор машины производит основной поток.
Конструкция статора
Частями статора являются рама, сердечник статора, обмотки статора и охлаждающее устройство. Рама статора изготовлена из чугуна для малогабаритных машин и сварной стали для крупногабаритных машин.Чтобы уменьшить гистерезис и потери на вихревые токи, сердечник статора собран из листовой стали с высоким содержанием кремния. Трехфазная обмотка вставляется в прорези на внутренней периферии статора. Обмотка соединена звездой и распределена по нескольким пазам. Когда ток течет в распределенной обмотке, он создает по существу синусоидальное пространственное распределение ЭДС.
Конструкция ротора
Конструкция ротора бывает двух типов
- Явнополюсный тип.
- Цилиндрический роторный тип.
Явнополюсный ротор
Термин «выступающий» означает «выступающий». Явный полюс состоит из полюсов, которые выступают из поверхности сердечника ротора. Они используются для роторов с четырьмя или более полюсами.
Ротор подвержен изменяющимся магнитным полям, поэтому он изготовлен из листовой стали для уменьшения потерь на вихревые токи. Столбы одинаковых размеров собираются путем складывания пластин до необходимой длины, а затем склепываются вместе.После того, как катушка возбуждения размещена вокруг каждого корпуса полюса, эти полюса соединяются с помощью соединения типа «ласточкин хвост» на стальном крестовине, прикрепленном к валу. Роторы с явнополюсными полюсами имеют поверхности для гашения колебаний ротора при резком изменении условий нагрузки. Неравномерный воздушный зазор сопровождает явнополюсную синхронную машину.
Воздушный зазор минимален под центрами полюсов и максимален между полюсами. Поверхности полюсов имеют такую форму, что радикальная длина воздушного зазора увеличивается от центра полюса к концам полюсов, так что распределение магнитного потока в воздушном зазоре является синусоидальным.Это поможет машине генерировать синусоидальную ЭДС.
Чтобы обеспечить чередование северной и южной полярностей, отдельные обмотки полюсов поля соединены последовательно. Конец обмотки возбуждения соединен с обмоткой постоянного тока щетками контактных колец.
Явнополюсные генераторы имеют большое количество полюсов и более низкую рабочую скорость. Генераторы с явным полюсом, приводимые в действие водяными турбинами, называются гидро-генераторами или гидрогенераторами .
Цилиндрический ротор
Машины с цилиндрическим ротором также известны как роторные машины с невыраженными полюсами . Конструкция ротора такова, что он образует гладкий цилиндр. У него нет физических полюсов, как в конструкции с явнополюсным строением. Эти роторы изготовлены из цельных поковок из высококачественной никель-хром-молибденовой стали.
Примерно на двух третях периферии ротора прорези прорезаны через равные промежутки времени и параллельно валу.
г.c в эти слоты подключаются обмотки возбуждения. Обмотка распределенного типа. Часть ротора без паза образует две полюсные поверхности. Эти машины имеют небольшой диаметр и большую осевую длину.
Такая конструкция ограничивает центробежные силы. Таким образом, цилиндрические роторы используются в высокоскоростных машинах.
Привод паровых или газовых турбин Машины с цилиндрическим ротором. Синхронные генераторы с цилиндрическим ротором называются турбогенераторами или турбогенераторами.
синхронных машин, 1.0 кВт — синхронные машины, 1,0 кВт — трехфазные синхронные машины 1 кВт — промышленные машины. 1 кВт — Электроприводы — Электротехника
Опыты проводятся на машинах промышленного образца. Все тестовые машины имеют специальную базу для подключения тестовой системы Machine 1.0. Система тестирования может использоваться для записи характеристик тестируемых машин. Электропитание машин осуществляется либо от сети, либо от специальных лабораторных источников питания.
Цели
- Меры защиты и электробезопасность
- Наладка электрических машин и ввод их в эксплуатацию
- Использование пусковых цепей
- Оценка характеристик электрических машин
Синхронные машины относятся к типичным видам трехфазных машин. В отличие от асинхронных (индукционных) машин, они работают с постоянной скоростью, которая зависит исключительно от частоты вращающегося поля.Следовательно, крутящий момент не влияет на скорость. Помимо их использования в качестве двигателей, например для конвейерных лент, текстильных машин, намоточных машин для бумаги и других намоточных машин они используются в качестве синхронных компенсаторов. При этом используется эффект, при котором как индуктивная, так и емкостная реактивная мощность может отбираться из питающей сети. По этой причине они обычно используются вместо больших конденсаторных батарей для компенсации индуктивной реактивной мощности, возникающей, например, в работе электродвигателей.
Характеристики
- Для защиты от перегрева обмотки статора испытуемых машин оснащены датчиками температуры.
- В случае перегрева испытательная система машины автоматически отключает испытательную машину, тем самым предотвращая ее повреждение.
- Испытуемые машины оснащены клеммной колодкой образовательной конструкции с напечатанной на ней конфигурацией обмотки.
- Концы всех обмоток подключены к клеммной колодке и доступны через 4-миллиметровые безопасные гнезда.
- Компьютерный сбор данных измерений обеспечивает значимые результаты измерений.
- Машины класса мощности 1 кВт обладают мощным и реалистичным рабочим откликом.
- По сравнению с машинами меньшего размера их характеристики отображают отличительные особенности, связанные с дизайном.
Полный комплект оборудования одинаково подходит для экспериментов студентов в лабораториях с низковольтными источниками питания (400 В трехфазный) и для установки на передвижной тележке для демонстрации учителями в классе. Процедуры экспериментов представлены в печатном руководстве.
Целевая группа состоит из учеников и студентов, изучающих электромашиностроение. Курс предлагает эксперименты на среднем уровне, а также позволяет получить необходимое понимание поведения машин для научной интерпретации на уровне бакалавриата.
Темы для синхронных двигателей
- Роторы с невыпадающими и явнополюсными полюсами
- Уравнения напряжения
- Эквивалентная схема и векторная диаграмма
- Работа на холостом ходу и с постоянным трехполюсным коротким замыканием
- Диаграммы локусов и характеристики управления
- Крутящий момент и нагрузка
- Диаграмма Потье и реакция якоря
- Синхронизация и использование нескольких машин параллельно
- Методы пуска синхронных двигателей
- Управление реактивной мощностью
- Мощность
Темы синхронных генераторов
- Генерация напряжения
- Возбуждение синхронных машин
- Рабочий отклик
- Ток и крутящий момент якоря
- Диаграммы работы и времени торможения
- Запуск и синхронизация
- Однофазные генераторы
Основные компоненты:
Синхронная машина
Синхронная машина
Рабочей лошадкой для выработки электроэнергии является синхронная машина.Основная часть электроэнергии вырабатывается трехфазными синхронными генераторами. Синхронные генераторы с номинальной мощностью в несколько сотен МВА распространены; самые большие машины имеют рейтинг до 1500 МВА. В установившемся режиме они работают со скоростью, зависящей от частоты энергосистемы, поэтому их называют синхронными машинами. В качестве генераторов синхронные машины работают параллельно на более крупных электростанциях. Тогда рейтинг 600 МВА является довольно распространенным.
В силовой установке вал паровой турбины установлен на валу синхронного генератора.Именно в генераторе происходит преобразование механической энергии в электрическую. Две основные части синхронной машины — это ротор и якорь или статор. Железный ротор снабжен обмоткой, возбуждаемой постоянным током, которая действует как электромагнит. Когда ротор вращается и обмотка ротора возбуждена, в воздушном зазоре между ротором и якорем присутствует вращающееся магнитное поле. Якорь имеет трехфазную обмотку, в которой изменяющаяся во времени ЭДС создается вращающимся магнитным полем.
Синхронные машины построены с двумя типами роторов: цилиндрические роторы, которые приводятся в движение паровыми турбинами на 3000–3600 об / мин (см. Рисунок 2.24 (a)), и роторы с явным полюсом, которые обычно приводятся в движение низкоскоростными гидротурбинами (см. Рисунок 2.24). (б)). В цилиндрическом роторе обмотка возбуждения размещена в пазах, разрезанных в осевом направлении по длине ротора. Диаметр ротора обычно составляет от 1 до 1,5 м, что делает машину пригодной для работы при 3000 или 3600 об / мин. Эти генераторы называются турбогенераторами.Ротор турбогенератора имеет одну k пар полюсов. Машины с явнополюсными полюсами обычно имеют больше пар полюсов, и для выработки частоты 50 Гц или 60 Гц они могут работать на более низкой скорости вращения.
Частота ЭДС, генерируемой в обмотках статора, и частота вращения ротора связаны соотношением
- f электрическая частота [Гц]
- p количество пар полюсов (т. Е. Количество полюсов, деленное на два)
Гидравлические турбины на гидроэлектростанциях вращаются со скоростью несколько сотен оборотов в минуту, в зависимости от типа, и поэтому для выработки частоты 50 или 60 Гц требуется много пар полюсов.
Эффективность генераторов очень важна. Синхронные генераторы на электростанциях имеют КПД 99%. Это означает, что для генератора мощностью 600 МВт вырабатывается 6 МВт тепла, поэтому машину необходимо охлаждать. Большие турбогенераторы охлаждаются водородом или водой. Водород имеет в 7 раз большую теплоемкость, чем воздух, а вода в 12 раз. Водород и / или вода проходят через полые обмотки статора. Охлаждение выравнивает распределение температуры в генераторе, поскольку точки перегрева влияют на срок службы электрической изоляции.Когда температурный градиент невелик, средняя температура машины может быть выше, а это означает, что генератор может быть рассчитан на более высокую мощность. Эволюция больших турбогенераторов была определена лучшими материалами, новыми обмотками и сложными методами охлаждения. Тихоходные генераторы на гидроэлектростанциях всегда больше, чем высокоскоростные машины такой же мощности на тепловых электростанциях, а хорошая система воздушного охлаждения с теплообменником обычно справляется с этой задачей для тихоходных машин.
Прежде чем синхронный генератор можно будет подключить к сети, должны быть выполнены четыре условия. Напряжение генератора должно:
- Имеют ту же последовательность фаз, что и напряжения сети.
- Имеют ту же частоту, что и сетка
- Имеют на своих выводах ту же амплитуду, что и напряжение сети.
- Быть в фазе с напряжением сети
Когда генератор подключен к большой сети, его выходное напряжение и частота привязаны к системным значениям и не могут быть изменены никаким действием на генератор.Мы говорим, что генератор подключен к бесконечной шине: идеальный источник напряжения с фиксированной амплитудой и частотой напряжения. Эквивалентная схема синхронизированного генератора представлена на рисунке 2.25. Реактивное сопротивление X называется синхронным реактивным сопротивлением и является постоянным в нормальных установившихся условиях. В эквивалентной схеме не учитывается сопротивление обмотки статора. Сразу после синхронизации и соединения генератор не подает и не потребляет энергию из сети.Пар, поступающий в турбину, такой же, как и до действия муфты, и его достаточно, чтобы привести в движение ротор и компенсировать потери турбины и генератора.
Если в турбину подается больше пара, можно ожидать увеличения скорости генератора, но это невозможно, поскольку генератор подключен к бесконечной шине. Это очень похоже на то, как два объекта связаны между собой упругой пружиной. Бесконечная шина является одним концом пружины и движется с постоянной скоростью, а синхронный генератор подключен к другому концу пружины, как показано на рисунке 2.26 (а) для ситуации, когда нет обмена энергией между генератором и сетью. Что произойдет, если в турбину будет подано больше пара, показано на Рисунке 2.26 (b). Крутящий момент, передаваемый на ось генератора первичным двигателем, пытается ускорить генератор, но может лишь немного растянуть пружину, поскольку она привязана к бесконечной шине, и вся дополнительная энергия преобразуется в электрическую энергию k: машина подает мощность в сетку. Что касается растяжения пружины, внутренняя ЭДС E теперь ведет напряжение на клеммах; В некотором смысле внутренняя ЭДС «тянет за собой» сетевое напряжение, как показано на рисунке 2.27.
Амплитуда внутренней ЭДС генератора E является функцией тока возбуждения I f и контролируется оператором генератора. На рисунке 2.27 E опережает напряжение системы В и на угол δ, который известен как угол мощности. Как следствие, ток и, следовательно, мощность поступают в сеть. Выражение для тока:
текущий вектор:
внутренний вектор ЭДС машины:
E = | E | ∠δ [В] вектор напряжения системы: В = | В | ∠0 [В] реактивное сопротивление машины [Ом]
Трехфазная комплексная мощность, подаваемая в энергосистему, равна S = 3 VI ∗ = P + jQg
Выражения для активной и реактивной мощности можно найти, исключив V или исключив I из уравнения 2.
