Что такое синхронные электрические машины. Как устроены синхронные генераторы и двигатели. Каков принцип действия синхронных машин. Где применяются синхронные генераторы и двигатели.
Устройство синхронных электрических машин
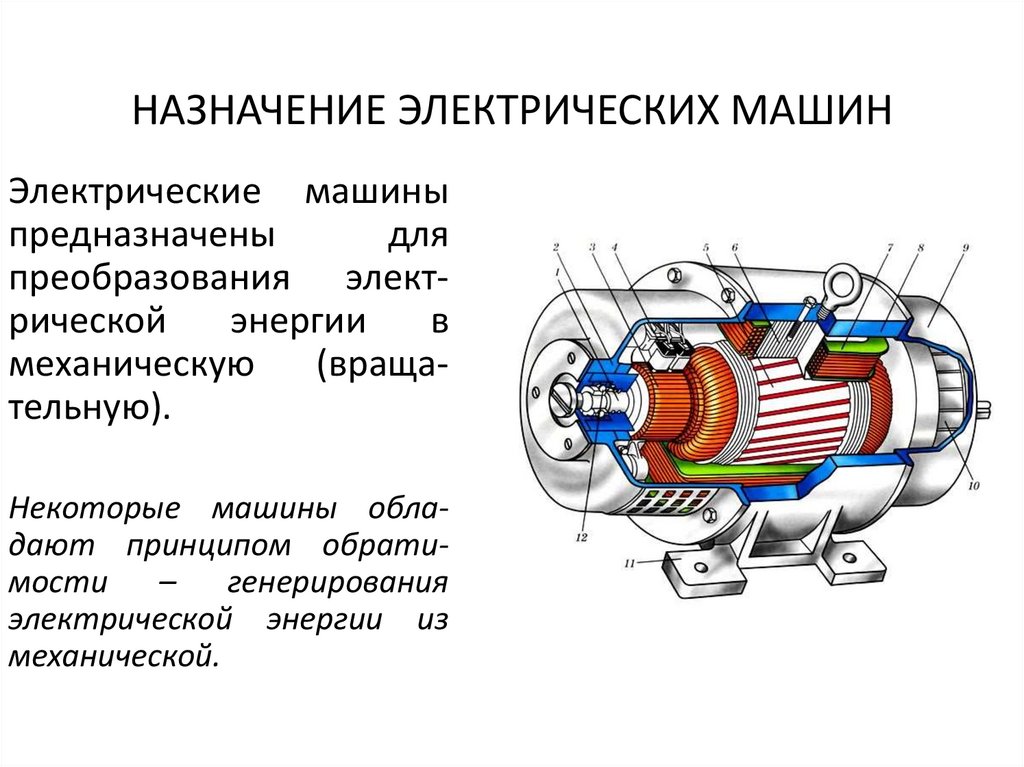
Синхронные электрические машины состоят из двух основных частей:
- Статор — неподвижная часть, на которой размещается трехфазная обмотка якоря
- Ротор — вращающаяся часть, на которой находится обмотка возбуждения
Статор синхронной машины аналогичен статору асинхронного двигателя и включает:
- Корпус
- Сердечник из электротехнической стали
- Трехфазную обмотку, уложенную в пазы сердечника
Ротор синхронной машины представляет собой электромагнит, создающий вращающееся магнитное поле. Он имеет:
- Обмотку возбуждения, питаемую постоянным током через контактные кольца
- Сердечники полюсов из стали
- Вал для крепления и вращения
Принцип действия синхронного генератора
Принцип работы синхронного генератора основан на явлении электромагнитной индукции:
- При вращении ротора с постоянной скоростью его магнитное поле пересекает обмотки статора
- В обмотках статора индуцируется переменная ЭДС
- Частота ЭДС прямо пропорциональна скорости вращения ротора
- При подключении нагрузки в обмотках статора возникает переменный ток
Как происходит индуцирование ЭДС в синхронном генераторе.
Величина индуцируемой в обмотках статора ЭДС определяется формулой:
E = 4,44 * f * w * Ф * kоб
где:
- f — частота тока
- w — число витков обмотки статора
- Ф — магнитный поток ротора
- kоб — обмоточный коэффициент
Особенности конструкции синхронных машин
Существует два основных типа роторов синхронных машин:
1. Явнополюсные роторы
Применяются в тихоходных машинах (80-1000 об/мин). Их особенности:
- Большое число полюсов (до нескольких десятков)
- Полюса имеют явно выраженную форму
- Обмотка возбуждения размещается на полюсах
- Используются в гидрогенераторах
2. Неявнополюсные роторы
Применяются в быстроходных машинах (3000-1500 об/мин). Их особенности:
- Цилиндрическая форма
- 2-4 полюса
- Обмотка возбуждения распределена по пазам ротора
- Используются в турбогенераторах
Принцип действия синхронного двигателя
Работа синхронного двигателя основана на взаимодействии магнитных полей статора и ротора:

- Трехфазный ток в обмотках статора создает вращающееся магнитное поле
- Это поле взаимодействует с полем ротора, создаваемым обмоткой возбуждения
- Возникает электромагнитный момент, вращающий ротор
- Ротор вращается синхронно с полем статора
Как регулируется скорость синхронного двигателя.
Скорость вращения ротора синхронного двигателя определяется формулой:
n = 60f / p
где:
- f — частота тока питающей сети
- p — число пар полюсов
Регулировать скорость можно двумя способами:
- Изменением частоты питающего тока
- Изменением числа пар полюсов (ступенчато)
Применение синхронных машин
Синхронные машины широко используются как в качестве генераторов, так и в качестве двигателей:
Синхронные генераторы:
- Турбогенераторы на тепловых и атомных электростанциях
- Гидрогенераторы на гидроэлектростанциях
- Дизель-генераторы на автономных электростанциях
- Бортовые генераторы на самолетах и кораблях
Синхронные двигатели:
- Привод мощных насосов и компрессоров
- Привод прокатных станов
- Привод шаровых мельниц
- Тяговые двигатели электровозов
Кроме того, синхронные машины применяются как компенсаторы реактивной мощности в электрических сетях.

Преимущества и недостатки синхронных машин
Синхронные машины имеют ряд преимуществ и недостатков по сравнению с другими типами электрических машин:
Преимущества синхронных машин:
- Высокий КПД (до 98-99%)
- Возможность работы с высоким коэффициентом мощности
- Стабильная скорость вращения независимо от нагрузки
- Возможность генерирования реактивной мощности
Недостатки синхронных машин:
- Сложность конструкции ротора
- Необходимость в источнике постоянного тока для возбуждения
- Сложность пуска синхронных двигателей
- Высокая стоимость по сравнению с асинхронными машинами
Особенности эксплуатации синхронных машин
При эксплуатации синхронных машин необходимо учитывать следующие особенности:
Для синхронных генераторов:
- Необходимость точной синхронизации при параллельной работе
- Контроль напряжения и частоты вырабатываемого тока
- Регулирование тока возбуждения для поддержания напряжения
Для синхронных двигателей:
- Сложность пуска (требуются специальные методы)
- Необходимость в устройствах возбуждения
- Контроль угла нагрузки для предотвращения выпадения из синхронизма
Правильный учет этих особенностей позволяет обеспечить надежную и эффективную работу синхронных машин в различных областях применения.
Устройство и принцип действия синхронной машины
Устройство синхронных машин.
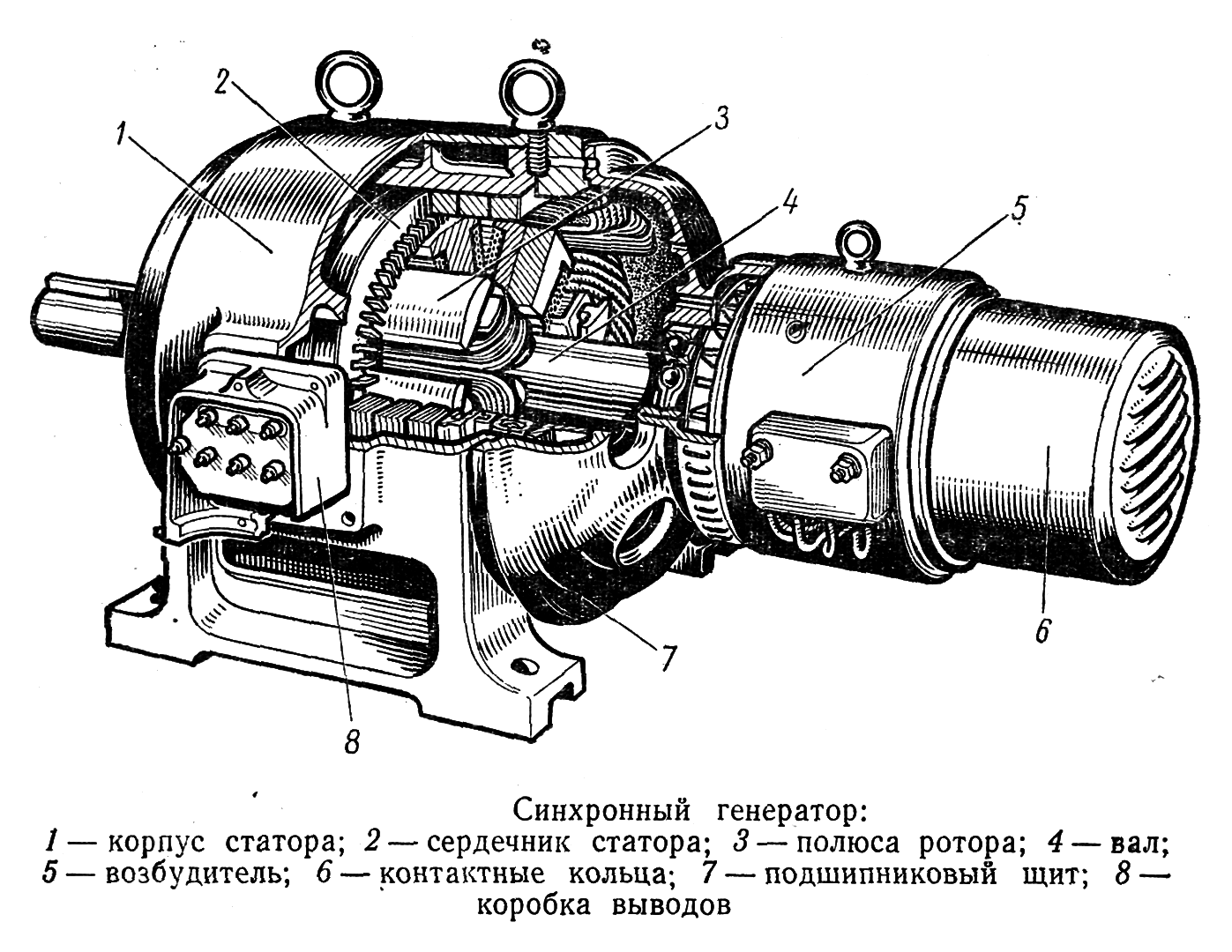
Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора, выполняющего функции якоря и ротора, вращающегося внутри статора и служащего индуктором (рис. 4.1).
Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем.
В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами.
Роторы с явно выраженными полюсами (рис. 4.1) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительноечисло полюсов. Конструктивно роторы этого типа (рис. 4.2) состоят из вала 6, ступицы 7, полюсов 8, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах.
Поверхность полюсного наконечника полюсов имеет такой профиль, что магнитная индукция в воздушном зазоре машины распределяется примерно по синусоидальному закону. Для быстроходных машин (турбогенераторы, синхронные двигатели, турбокомпрессоры и т. п.) явнополюсная конструкция ротора неприменима из-за сравнительно большого диаметра ротора и возникающих в связи с этим недопустимо больших центробежных сил.
Большей механической прочностью обладает ротор с неявно выраженными полюсами. Он состоит (рис. 4.3) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному.
Принцип работы и ЭДС синхронного генератора.
Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 4.4).
При вращении ротора синхронного генератора от проводного двигателя ПД с постоянной частотой nо магнитное поле ротора, пересекая проводники фазных обмоток статора AX, BY, CZ (рис.4.4,а) наводит в них ЭДС , где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника; – линейная скорость пересечения проводников магнитным полем.
Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону , где — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике .
Обозначив, получим , т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя – см. п. 3.8.1). Действующее значение ЭДС одной фазы определяется выражением:
где – обмоточный коэффициент; – частота синусоидальных ЭДС; — число витков одной фазы обмотки статора; — число пар полюсов; – максимальный магнитный поток полюса ротора; – синхронная частота вращения.
Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 120 0, и их ЭДС образуют симметричную трёхфазную систему.
Изменяя ток возбуждения , можно регулировать магнитный поток ротора и пропорциональную ему ЭДС генератора. На рис. 4.5 представлена зависимость , снятая при номинальной частоте вращения .
Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферромагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком и током возбуждения , что обусловлено явлением насыщения магнитной системы машины.
Принцип действия и вращающий момент синхронного двигателя.
Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. Вращающееся поле статора с полюсами N и S создается при питании обмоток статора от трёхфазной сети аналогично вращающемуся полю асинхронного двигателя (на рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой
Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения против часовой стрелки. Тогда полюсы ротора и будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора и (см. штрихованные линии на рис. 4.6).
В режиме идеального холостого хода (момент сопротивления ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы и, которые не создают ни вращающего момента, ни момента сопротивления.
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления , ось ротора и его полюсов , сместится в сторону отставания на угол (рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие и создают вращающий момент , где — радиус ротора.
Машина работает в двигательном режиме, её вращающий момент преодолевает момент сопротивления механической нагрузки.
При увеличении момента механической нагрузки на валу ротора угол увеличивается (до некоторого предела), что приводит к увеличению вращающегося момента двигателя , причем частота вращения ротора остается неизменной и равной .
Противодействующий момент и противо-ЭДС.
При работе синхронной машины в режиме нагруженного генератора (на схеме рис. 4.4,б нагрузка Zн подключена к обмоткам статора через выключатель Q) по обмоткам статора протекает ток, который создает своё вращающееся магнитное поле. В генераторном режиме, в отличие от двигательного режима, полюсы ротора опережают на угол полюсы магнитного поля статора.
В результате взаимодействия разноименных полюсов статора и ротора на ротор действует момент, направленный против вращения, т.е. тормозной момент . В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя: .
При работе синхронной машины в режиме двигателя поле ротора пересекает витки трехфазной обмотки статора и в ней индуцируется ЭДС, которая согласно правилу Ленца действует навстречу току статора. По этой причине её называют противо-ЭДС. В установившемся режиме противо-ЭДС почти полностью уравновешивает напряжение сети .
Таким образом, при работе синхронной машины на нагрузку (электрическую или механическую) в обмотке статора индуцируется ЭДС Е и возникает момент ротора .
Реакция якоря в синхронной машине.
Реакция якоря – это воздействие поля якоря (статора) на магнитное поле машины. При работе синхронной машины на нагрузку (электрическую в режиме генератора и механическую в режиме двигателя) по обмоткам статора (якоря) протекают синусоидальные токи, которые создают вращающееся магнитное поле статора. Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора , где — число пар полюсов машины.
Частота вращения магнитного поля статора .
Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
Рассмотрим реакцию якоря на примере двухполюсного синхронного генератора с неявно выраженными полюсами ротора, работающего на различную по характеру нагрузку .
При активной нагрузке с сопротивлением R ЭДС фазы обмотки статора и её ток совпадают по фазе и достигают максимума в тот момент, когда ось mm1 магнитного потока ротора Ф0 перпендикулярна оси nn1 катушки обмотки статора (например, АX на рис. 4.7,а).
Магнитный поток статора Фя замыкается по сердечникам статора и ротора через воздушный зазор. Таким образом, в случае активной нагрузки ось потока ротора Ф0 опережает ось потока статора Фя на электрический угол, равный 900 (поперечная реакция якоря).
При этом результирующий магнитный поток машины (ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
При чисто индуктивной нагрузке XL ток в обмотке статора отстаёт от ЭДС на 900 и поэтому достигает максимума в тот момент времени, когда полюс ротора повернётся на 900 по направлению вращения (рис. 4.7,б). В этом случае магнитный поток статора оказывается направленным навстречу магнитному потоку ротора и размагничивает машину ().
При емкостной нагрузке XC ток в фазе статора опережает ЭДС на 900 и поэтому достигает максимума в тот момент, когда полюс ротора не доходит на 900 до оси mm1 (рис. 4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ().
При работе синхронной машины в режиме двигателя ток в статоре при том же направлении вращения имеет противоположное направление. Ось результирующего потока двигателя оказывается повернута относительно потока ротора на угол , но не против направления вращения, как у генератора, а по направлению вращения.
Таким образом, реакция якоря в синхронной машине изменяет как поток машины, так и его направление (в отличие от асинхронной машины, у которой ). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора.
Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
Принцип действия и устройство электрических машин переменного тока. Синхронные машины
Машины переменного тока по устройству несколько отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока, у машин переменного тока на статоре обычно укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения.
Синхронными называют такие машины переменного тока, у которых скорость вращения ротора и частота переменного тока в обмотках изменяются одновременно и пропорционально друг другу, т. е. синхронно. С изменением частоты тока у таких машин одновременно (синхронно) меняется число оборотов.
Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т.е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота сети переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток — фаз, сдвинутых относительно друг друга на 120° (1/3 периода) с таким расчетом, чтобы индуктируемая э.д.с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э.д.с. соседней фазы. Обмотку возбуждения укладывают на роторе и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный на одном валу с синхронным генератором, или аккумуляторная батарея.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмоток статора отходят три провода (три контакта). Продольный разрез синхронного генератора трехфазного переменного тока с возбудителем показан на рис. 172.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемого постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магнитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
На рис. 173, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду. При соединении в треугольник начало первой фазы I соединяется с концом II, начало II — с концом III и начало III — с концом I.
При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности. За последние годы на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. При этом схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на клеммах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор работал в режиме двигателя, нужно отключить первичный двигатель и к фазным обмоткам статора подвести трехфазный ток из сети.
В этом случае генератор станет синхронным Электродвигателем, потребляющим ток. Проходя по фазным обмоткам, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же скоростью, как вращающееся магнитное поле. При этом генератор не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование скорости вращения ротора синхронного двигателя производится изменением частоты тока сети, а изменение направления вращения ротора — переключением двух любых фаз, т.е. взаимным пересоединением двух питающих проводов.
Похожие статьи
Синхронные машины | Электрические машины
Страница 22 из 51
Конструкция, назначение и области применения синхронных машин
Синхронной машиной называется электрическая машина переменного тока, у которой частота вращения ротора n находится в строгом соответствии с частотой сети :
.
На статоре синхронной машины располагается трехфазная обмотка переменного тока, называемая обмоткой якоря, а на роторе располагается обмотка постоянного тока, называемая обмоткой возбуждения. Существует две основных разновидности исполнения обмоток возбуждения: распределенные и сосредоточенные. Распределенные обмотки применяются при неявнополюсной конструкции ротора (рис. 5.1). В каждом пазу располагается только одна сторона катушки. Поэтому такая обмотка является однослойной. Число катушек на полюсном делении равно . Они соединяются последовательно, образуя полное число витков обмотки возбуждения
,
где — число витков в катушке.
Неявнополюсную конструкцию ротора имеют быстроходные синхронные машины с и . Частота вращения ротора таких машин при соответственно равна 3000 и 1500 . Для получения необходимой механической прочности неявнополюсные роторы выполняются из массивной стальной поковки.
В машинах с ротор имеет явнополюсную конструкцию (рис. 5.2). Обмотка возбуждения таких машин выполняется сосредоточенной в виде катушек (1) и размещается на сердечниках полюсов (2). Для закрепления катушек на полюсах используются полюсные наконечники (3). Все катушки соединяются последовательно, образуя полное число витков обмотки возбуждения
.
Для улучшения динамических свойств синхронной машины в полюсные наконечники помещают дополнительную короткозамкнутую обмотку (4), выполняемую аналогично короткозамкнутой обмотке асинхронной машины. Ее называют успокоительной или демпферной. Иногда роль демпферной обмотки выполняют массивные полюсные наконечники.
Основная область применения синхронных машин — энергетика, где они используются в качестве генераторов электрической энергии. В зависимости от типа привода синхронные генераторы делятся на турбогенераторы, гидрогенераторы и дизельные генераторы.
Турбогенераторы приводятся во вращение быстроходными паровыми или газовыми турбинами. Это и обусловливает конструкцию турбогенераторов. Ротор турбогенератора имеет неявнополюсное исполнение (рис. 5.1) с горизонтальным расположением оси вращения. Предельный диаметр ротора по условию механической прочности составляет . Активная длина ротора достигает . Максимальная мощность, развиваемая такими турбогенераторами при , составляет 1200 мВт.
Гидрогенераторы приводятся во вращение гидротурбинами. В зависимости от напора воды и мощности турбины частота вращения гидрогенераторов колеблется в пределах от 50 до . Поэтому гидрогенераторы являются тихоходными машинами с числом пар полюсов
.
Для размещения такого числа полюсов приходится увеличивать диаметр ротора до при длине . Гидрогенераторы выполняются обычно с вертикальной осью вращения вала. Гидротурбина располагается под генератором. Максимальная мощность современных гидрогенераторов достигает 800 МВт.
Дизельные генераторы приводятся во вращение двигателями внутреннего сгорания. Они имеют сравнительно небольшую мощность (до 10 МВт) и используются для питания автономных потребителей. Дизельные генераторы имеют явнополюсную конструкцию ротора при числе полюсов и выполняются с горизонтальным расположением вала.
Наряду с генераторным режимом широко используется и двигательный режим синхронных машин, применяемых в качестве двигателей для привода мощных насосов, компрессоров, воздуходувок и других крупных установок.
Одним из основных достоинств синхронных машин является способность генерировать реактивную мощность. Существует даже специальный тип синхронных машин, предназначенных исключительно для генерирования реактивной мощности. Такие машины называются синхронными компенсаторами. Синхронные компенсаторы выпускаются на мощность от 15 до 160 при частотах вращения . Роторы таких машин имеют явнополюсное исполнение.
Новая книга А.П. Епифанов «Электрические машины»
Епифанов А. П., Епифанов Г. А. Электрические машины: Учебник. — СПб.: Издательство «Лань», 2017. — 300 с.: ил. — (Учебники для вузов. Специальная литература). 6П2 Е 67 Имеются экземпляры в отделах: ЧЗ (2)
Содержание учебника соответствует Государственному образовательному стандарту и примерной программе дисциплины Электрические машины». Книга включает два раздела: «Введение в электромеханику» (главы 1, 2), где изложены физические основы электромеханического преобразования энергии, общие вопросы устройства и работы электрических машин; «Трансформаторы и электрические машины* (главы 3—8), содержащий традиционный для рассматриваемого курса материал. В отдельную главу вынесены специальные машины — вентильные, линейные, универсальные. Учебник предназначен для обучающихся в высших учебных заведениях по программам бакалавриата и магистратуры по направлениям «Теплоэнергетика и теплотехника», «Агроинженерия», «Наземные транспортно-технологические комплексы», «Электроэнергетика и электротехника». Книга будет полезна специалистам, занятым в сфере эксплуатация электрических машин.
ОГЛАВЛЕНИЕ
Предисловие
Введение
Раздел I. Введение в электромеханику
Глава 1. Физические основы электромеханического преобразования
энергии
1.1. Основные физические законы электромеханического преобразования
энергии
1.2. Материалы, применяемые в электрических машинах
1.3. Баланс энергии в электромеханических системах
1.4. Запас энергии в электромеханических системах
1.5. Общие уравнения сил для электромагнитных систем
1.6. Уравнения электродвижущих сил
1.7. Реактивные электродвигатели
1.8. Двухобмоточные электромагнитные преобразователи
1.9. Двухобмоточный вращающийся преобразователь
1.10. Выводы
Глава 2. Общие вопросы устройства и работы электрических машин
2.1. Общие сведения, классификация электрических машин
2.2. Структура электрических машин
2.3. Электромагнитный момент в электрических машинах
2.4. Режимы работы электрических машин
2.5. Потери энергии и коэффициент полезного действия
2.6. Нагревание и охлаждение электрических машин
2.7. Главные размеры и основные электромагнитные нагрузки электрических машин
2.8. Выводы
Раздел II. Трансформаторы и электрические машины
Глава 3. Трансформаторы
3.1. Общие сведения о трансформаторах. Принцип действия
3.2. Устройство трансформаторов. Схемы и группы соединения обмоток
3.3. Холостой ход двухобмоточного трансформатора
3.4. Короткое замыкание трансформатора
3.4.1. Физические условия работы
3.4.2. Уравнения напряжений трансформатора при коротком замыка¬нии. Приведенный трансформатор
3.4.3. Параметры и потери короткого замыкания
3.5. Работа трансформатора под нагрузкой
3.6. Коэффициент полезного действия трансформатора
3.7. Изменение напряжения трансформатора
3.8. Параллельная работа трансформаторов
3.9. Регулирование напряжения
3.10. Несимметричные режимы работы трехфазных трансформаторов .
3.11. Специальные типы трансформаторов
Глава 4. Общие вопросы машин переменного тока
4.1. Типы машин переменного тока
4.2. Основные понятия и термины
4.3. ЭДС проводника, витка (секции), катушечной группы, фазы обмотки
4.4. Типы якорных обмоток
4.5. Магнитодвижущие силы обмоток машин переменного тока ….
4.6. Магнитные поля обмоток переменного тока
Глава 5. Асинхронные машины
5.1. Конструктивные особенности асинхронных машин
5.2. Соотношения для вторичной цепи асинхронного двигателя. Режимы
работы
5.3. Схема замещения асинхронной машины и её параметры
5.4. Механические характеристики асинхронных машин
5.5. Пуск асинхронных двигателей
5.6. Регулирование скорости асинхронных двигателей
5.6.1. Регулирование скорости изменением жёсткости характеристик
5.6.2. Регулирование изменением скорости идеального холостого хода
5.7. Особенности работы асинхронного двигателя при питании от преобразователя частоты
5.8. Работа асинхронных двигателей при неноминальных условиях . .
5.9. Несимметричные режимы работы асинхронных двигателей ….
5.10. Однофазные асинхронные двигатели
Глава 6. Синхронные машины
6.1. Общие сведения
6.2. Магнитное поле синхронной машины
6.3. ЭДС реакции якоря и индуктивные сопротивления синхронных машин
6.4. О переходных процессах в синхронных машинах
6.5. Векторные диаграммы синхронных генераторов при симметричной нагрузке
6.6. Характеристики синхронных генераторов
6.7. Параллельная работа синхронных машин
6.7.1. Электромагнитные мощность и момент синхронной машины. Угловая
характеристика
6.7.2. 11-образные характеристики синхронной машины. Регулирование
реактивной мощности
6.8. Синхронный двигатель. Компенсатор
Глава 7. Коллекторные машины постоянного тока
7.1. Принцип действия, устройство, функциональные особенности . . .
7.2. Магнитные поля индуктора и якоря и их взаимодействие ….
7.2.1. Магнитная цепь машины при холостом ходе
7.2.2. Магнитное поле якоря
7.2.3. Результирующее магнитное поле
7.3. ЭДС обмотки якоря и электромагнитный момент
7.4. Коммутация
7.5. Характеристики генераторов постоянного тока
7.6. Характеристики двигателей постоянного тока
7.7. Пуск двигателей постоянного тока
7.8. Регулирование скорости электродвигателей постоянного тока . . .
7.9. Механические характеристики двигателей постоянного тока . . .
Глава 8. Специальные электрические машины
8.1. Вентильные двигатели
8.2. Линейные асинхронные двигатели
8.3. Линейные синхронные двигатели
8.4. Линейные электромагнитные двигатели
8.5. Однофазные коллекторные двигатели
Приложения
Таблица 1. Международная система единиц физических величин. .
Таблица 2. Основные соотношения электротехники
Таблица 3. Множители и приставки для образования десятичных кратных и дольных единиц
Синхронные электрические машины
Устройство синхронной машины
Определение 1
Синхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора равна частоте вращения магнитного поля в воздушном зазоре.
На рисунке ниже изображены примеры электрической и электромагнитной схемы синхронной машины.
Рисунок 1. Схема синхронной машины. Автор24 — интернет-биржа студенческих работ
а — электромагнитная схема; б — схема включения; 1 — статор; 2 — ротор; 3 — трехфазная обмотка; 4 — обмотка ротора; 5 — щетки; 6 — контактные кольца.
Основными частями синхронной машины являются:
- Индуктор.
- Якорь.
В большинстве синхронных электрических машин якорь располагается на статоре, а индуктор на роторе, который отделен от якоря воздушным зазором.
Якорь представляет собой одну или несколько обмоток переменного электрического тока. Токи, которые подаются в якорь создают вращающееся магнитное поле, которое сцепляется с индуктором, что способствует преобразованию энергии. Поле, создаваемое якорем, воздействует на поле индуктора — поле реакции якоря. Поле реакции якоря в генераторах создается переменными токами, которые индуцируются в обмотке якоря от индуктора.
Индуктор синхронной электрической машины состоит из полюсов — постоянных магнитов в микро-машинках, или электромагнитов постоянного электрического тока в больших машинах. Индуктор может быть двух конструкций — неявнополюсным или явнополюсным. Полюса у якоря явнополюсной конструкция схожи с полюсами машин постоянного тока, а также они ярко выражены. У неявнополюсной конструкции обмотка возбуждения уложена в пазы сердечника индуктора и похожа на обмотку роторов асинхронной машины с фазным ротором. Разница между ними в том, что между полюсами оставляют место, которое не заполнено проводниками (большой зуб). Данная конструкция используется в быстроходных машинах с целью снижения механической нагрузки на полюса.
Готовые работы на аналогичную тему
Определение 2
Асинхронная машина – это электрический двигатель переменного тока, у которого частота вращения ротора не равна (в двигательном режиме работы) частоте вращения магнитного поля.
Для того, чтобы снизить магнитное сопротивление применяются ферромагнитные сердечники в статорах и роторах. Они представляют собой шихтованную конструкцию, изготовленную из отдельных стальных листов (электротехническая сталь). Основное ее преимущество заключается в том, что в ней содержится много кремния, что повышает ее электрическое сопротивление и снижает вихревые токи.
Режимы работы синхронных электрических машин
Принцип действия синхронной машины основан на взаимодействии между магнитными полями полюсов индуктора и якоря. В мощных синхронных машинах электромагниты используются, как полюса, а в маломощных постоянные магниты. Синхронные машины могут работать в двух режимах:
- Двигательный.
- Генераторный.
Синхронный двигатель нуждается в разгоне до частоты, которая близка к частоте вращения магнитного зазора, прежде, чем она сможет функционировать синхронном режиме. Как правило, для разгона используется асинхронный режим, обмотки индуктора замыкаются через реостат или накоротко (как в асинхронной машине). С этой целью на роторе делается короткозамкнутая обмотка, выполняющая роль успокоительной обмотки. Когда машина выходит на скорость, которая близка к номинальной (более 95 %) индуктора запитывается постоянным током. В машинах с постоянными магнитами используется внешний двигатель разгона. Также применяют частотный пуск, при котором частота якоря увеличивается постепенно с 0 до номинальной величины или постепенно уменьшается частота индуктора от номинальной до 0. В этом случае частота вращения ротора неизменна выражается следующей формулой:
$n = 60 / p$
где, р — количество пар полюсов ротора.
Синхронные генераторы, как правило изготавливаются с якорем, находящимся на статоре. принцип действия синхронного генератора основан на электромагнитной индукции, то есть при вращении ротора, магнитный поток, который создается обмоткой возбуждения, по очереди сцепляется с каждой фаз обмотки статора, тем самым индуцируя в них электродвижущую силу.
Частоту индуцируемой электродвижущей силы можно выразить следующим образом:
$f = (n*p) / 60$
где, р — количество пар полюсов ротора.
Разновидности синхронных машин
К основным видам синхронных электрических машин относятся: ударные генераторы, гидрогенераторы, машины двойного действия, турбогенераторы, синхронные компенсаторы. В ударных генераторах синхронный генератор предназначен для кратковременной работы машины в режиме короткого замыкания. Гидрогенератор представляет собой синхронный генератор, который вырабатывает электрическую энергию от гидротурбины. В машинах двойного действия создаются несинхронные режимы, за счет питания обмоток статора и ротора токами, обладающих разной частотой. В турбинных генераторах генератор функционирует от газовой или паровой турбины при высоких скоростях вращения ротора. Синхронный компенсатор предназначен для выработки реактивной мощности в режиме холостого хода.
58) Синхронные электрические машины. Устройство и принцип действия
а) Общие сведения
Синхронные электрические машины характерны тем, что у них ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора, подобного статору асинхронной машины. Это достигается тем, что ротор синхронной машины представляет собой обычно электромагнит или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную угловую скорость последнего независимо от момента на валу. Это свойство синхронных машин позволяет использовать их в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев, например в металлургии, их использование становится необходимым. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт.
Основной областью применения синхронных машин является использование их в качестве промышленных генераторов для выработки электрической энергии на электростанциях.
б) Устройство синхронной машины
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины рис. 14.1). Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри массивного корпуса. В пазах с внутренней стороны статора размещена обмотка переменного тока, в большинстве случаев трехфазная.
Ротор синхронной машины представляет собой электромагнит — явнополюсный (рис. 15.1, где / — полюсы, 2— полюсные катушки, 3 — сердечник ротора, 4 — контактные кольца) или неявнополюсный (рис. 15.2, где / — сердечник ротора, 2 — пазы с обмоткой, 3 — контактные кольца). Ток в обмотку ротора поступает через контактные кольца и щетки от внешнего источника постоянного тока — возбудителя.
У многополюсной синхронной машины ротор имеет р пар полюсов, а токи в обмотке статора образуют тоже р пар полюсов вращающегося магнитного поля (как у асинхронной машины). Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения равна:
п = 60f/р.
При стандартной промышленной частоте 50 Гц максимальная частота вращения, соответствующая двухполюсной(р = 1) машине, будет 3000 об/мин. Это частота вращения современного турбоагрегата, состоящего из первичного двигателя — паровой турбины и неявнополюсного синхронного генератора (турбогенератора).
Угидроагрегата гидравлическая турбина вращается относительно медленно. Это вынуждает изготовлять гидрогенераторы многополюсными с явными полюсами и в большинстве случаев — вертикальным валом. Частота вращения этих генераторов — от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Вследствие относительно малых частот вращения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности — свыше 8 кг/ (кВ-А), чем генераторы к паровым турбинам— менее 2,5 кг/(кВ-А).
в) Режимы работы синхронной машины
Любая синхронная машина, включенная в электрическую систему, может’ работать в режиме генератора и двигателя. Режим работы синхронной машины определяется взаимодействием магнитных полей, создаваемых токами в обмотках статора и ротора. Рассмотрим режимы работы двухполюсной машины. Наложение магнитных полей токов в фазных обмотках статора возбуждает в синхронной машине, так же как и в асинхронной, магнитное поле (см. § 14.3), вращающееся с угловой скоростью со. Приближенное распределение магнитных линий вращающегося магнитного поля в магнитопроводе синхронной машины в режимах генератора (а) и двигателя (б) показано на рис. 15.3 штриховой линией. Распределение линий вращающегося магнитного поля показывает, что приближенно его можно представить в виде вращающейся с угловой скоростью <о пары полюсов, расположенных на статоре.
Аналогичным образом магнитное поле, создаваемое током в обмотке вращающегося ротора, также можно приближенно представить в виде вращающейся пары полюсов, расположенных на роторе.
Если пренебречь всеми видами потерь энергии в синхронной машине, то при отсутствии момента на валу ось полюсов ротора будет совпадать с осью полюсов статора.
Для того чтобы заставить синхронную машину, включенную в систему, работать в режиме генератора, отдавая в эту систему энергию, необходимо увеличить механический момент, приложенный первичным двигателем к валу машины. Тогда под действием возросшего вращающего момента ось магнитных полюсов ротора повернется на некоторый угол у относительно оси полюсов статора в направлении вращения (рис. 15.3, а). Так как при этом результирующее магнитное поле, создаваемое наложением магнитных полей токов в обмотках ротора и статора, изменится, то ток в обмотках статора также изменится. Взаимодействие этого тока с магнитным полем ротора создает тормозной момент, действующий на ротор. Это и означает преобразование механической мощности первичного двигателя в электрическую мощность генератора, включенного в систему. Магнитные полюсы ротора будут как бы тянуть за собой магнитные полюсы статора.
Если теперь приложить к валу машины вместо вращающего тормозной момент механической нагрузки, то ось полюсов ротора повернется на некоторый угол относительно оси полюсов статора против направления вращения (рис. 15.3,6). Вновь возникнут токи в обмотках статора и создадут электромагнитные силы взаимодействия токов статора и магнитного поля ротора, но на этот раз эти силы будут стремиться увлечь ротор в направлении вращения. Электромагнитные силы создадут теперь вращающий момент, при посредстве которого электрическая энергия сети преобразуется в механическую на валу машины; таким путем синхронная машина переходит? в режим двигателя.
Режим работы синхронной машины изменяется от генераторного на двигательный и обратно в зависимости от механического воздействия на вал машины, причем электромагнитные силы играют роль своеобразной упругой связи между ротором и статором.
Синхронный двигатель: принцип работы, устройство, назначение
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
Что такое синхронная машина? — Основные принципы
Синхронная машина состоит как из синхронных двигателей, так и из синхронных генераторов. Система переменного тока имеет некоторые преимущества перед системой постоянного тока. Таким образом, система переменного тока используется исключительно для производства, передачи и распределения электроэнергии. Машина, которая преобразует механическую энергию в электрическую энергию переменного тока, называется синхронным генератором или генератором переменного тока. Однако, если одна и та же машина может работать как двигатель, это называется синхронным двигателем .
Синхронная машина — это машина переменного тока, удовлетворительная работа которой зависит от соблюдения следующих соотношений.
Где,
- N с — синхронная скорость в оборотах в минуту (об / мин)
- f — частота питания
- P — количество полюсов станка.
При подключении к системе электроснабжения синхронная машина всегда поддерживает указанное выше соотношение, показанное в уравнении (1).
Если синхронная машина, работающая как двигатель, не может поддерживать среднюю скорость (N s ), машина не будет развивать достаточный крутящий момент для поддержания своего вращения и остановится. Тогда говорят, что двигатель не работает.
В случае, когда синхронная машина работает как генератор, она должна работать с фиксированной скоростью, называемой синхронной скоростью, для выработки энергии с определенной частотой. Поскольку все устройства или машины предназначены для работы на этой частоте.В некоторых странах значение частоты составляет 50 герц .
Основные принципы синхронной машины
Синхронная машина — это просто электромеханический преобразователь, преобразующий механическую энергию в электрическую или наоборот. Фундаментальное явление или закон, который делает эти преобразования возможными, известен как Закон электромагнитной индукции и Закон взаимодействия .
Подробное описание поясняется ниже.
Закон электромагнитной индукции
Этот закон также называют первым законом электромагнитной индукции Фарадея. Этот закон относится к производству ЭДС, т.е. ЭДС индуцируется в проводнике всякий раз, когда он пересекает магнитное поле, как показано ниже:
Закон взаимодействия
Этот закон относится к созданию силы или крутящего момента, т. Е. Всякий раз, когда проводник с током помещается в магнитное поле, за счет взаимодействия магнитного поля, создаваемого проводником с током, и основным полем, сила действует на проводник, создающий крутящий момент.Цифра показана ниже:
Трехфазная синхронная машина
- Машина, которая используется в бытовых приборах, например, небольшая машина, используемая в воздухоохладителях, холодильных установках, вентиляторах, кондиционерах и т. Д.
- Однако большие машины переменного тока являются синхронными машинами трехфазного типа по следующим причинам.
- При одинаковом размере рамы трехфазные машины имеют мощность почти в 1,5 раза больше, чем однофазные.
- Трехфазная мощность передается и распределяется более экономично, чем однофазная.
- Трехфазные двигатели самозапускающиеся (кроме синхронных двигателей).
- Трехфазные двигатели имеют абсолютно равномерный постоянный крутящий момент, тогда как однофазные двигатели имеют пульсирующий момент.
В малой синхронной машине обмотка возбуждения размещена на статоре, а обмотка якоря — на роторе, тогда как в большой синхронной машине обмотка возбуждения размещена на роторе, а обмотка якоря — на статоре. .
Моделирование синхронных электрических машин для моделирования в реальном времени и автомобильных приложений
https://doi.org/10.1016/j.jfranklin.2017.07.030Получить права и содержаниеАннотация
Недавние исследования в области электрификации транспортных средств показали, что синхронные машины, которые включают синхронную машину с постоянными магнитами (PMSM) и синхронную машину с внешним возбуждением (EESM), представляют собой жизнеспособное решение для электрических движителей. Сложной проблемой для приводов синхронных машин, используемых в автомобильной промышленности, является получение точных математических моделей, которые могут иметь дело с параметрическими вариациями и которые подходят для моделирования в реальном времени и синтеза законов управления.Цель этой статьи — предоставить основу математического моделирования для синхронных машин, которая может дать ответ на эту сложную проблему. С этой целью с использованием системы отсчета ротора построены математические модели PMSM и EESM с учетом также параметрического изменения из-за магнитного насыщения и изменения температуры. Затем разрабатывается комплексная билинейная модель в пространстве состояний для EESM и PMSM с параметрическим изменением из-за магнитного насыщения и температуры. Рассматривая параметрическое изменение как политопическое ограниченное возмущение, затем показано, как разделить билинейную комплексную модель на две модели пространства состояний с переменным параметром PWA, подходящие для структуры каскадного управления.На основе разработанных моделей построен динамический унифицированный симулятор в Matlab ® / Simulink ® . Данные измерений, полученные на реальном испытательном стенде, использовались для проверки точности симулятора. Затем имитатор дискретного времени был интегрирован в промышленный стенд для тестирования аппаратного обеспечения в контуре для оценки в реальном времени схемы управления током в приводах EESM.
Рекомендуемые статьиЦитирующие статьи (0)
Полный текст© 2017 Институт Франклина.Опубликовано Elsevier Ltd. Все права защищены.
Рекомендуемые статьи
Ссылки на статьи
Синхронная машина — обзор
3.4 Динамические уравнения синхронной машины в системе отсчета d-q
В этом разделе представлены все дифференциально-алгебраические уравнения, необходимые для моделирования синхронной машины во временной области. Уравнения отражают субпереходное динамическое поведение синхронного генератора с четырьмя эквивалентными катушками, как показано на рис.3.5 и единое представление сосредоточенных масс для контура угла крутящего момента (Пал и Чаудхури, 2010).
Простейшая механическая модель — это модель с одной сосредоточенной массой, как показано на рис. 3.7. Эта очень простая модель предоставляет информацию о скорости вращения генератора с учетом приложенного механического крутящего момента и создаваемого электрического крутящего момента. Одномассового представления достаточно для явлений энергосистемы, изучаемых в этой книге. Уравнения, управляющие динамикой одномассовой модели: (3.21) и (3.22).
Рисунок 3.7. Одномассовая модель.
Ур. (3.21) фиксирует изменение угла ротора генератора из-за несоответствия между синхронной скоростью сети и угловой скоростью ротора. ωr − ωs необходимо умножить на базовое значение ωb, поскольку δ в (3.21) — это угол, который не преобразуется в систему pu.
(3.21) dδdt = ωb (ωr − ωs)
Ур. (3.22) необходимо для описания изменения угловой скорости ротора из-за несовпадения моментов в механической системе.Если входной механический крутящий момент больше электрического крутящего момента, с учетом демпфирования, ротор будет ускоряться. Если электрический крутящий момент больше механического, с учетом демпфирования, ротор замедлится. Скорость, с которой ротор ускоряется или замедляется, определяется инерцией генератора.
(3.22) dωrdt = 12H (Tm − Te − D (ωr − ωs))
Механический крутящий момент является входной величиной для моделирования синхронной машины. Электрический крутящий момент можно рассчитать из электрических уравнений машины, как показано в (3.23).
(3,23) Te = Xd » — XlsXd’ − XlsEq’Iq + Xd’ − Xd»Xd’ − Xlsψ1dIq + Xd » — XlsXd’ − XlsEq’Id − Xd’ − Xd»Xd’ − Xlsψ2qId — (Xd » — Xd ») IqId
Изменение переходной ЭДС из-за магнитной связи поля (3.24) косвенно пропорционально временной постоянной разомкнутой цепи переходной оси d.
(3.24) dEq’dt = 1Td0 ‘[- Eq’ + Efd + (Xd − Xd ‘) (Id + Xd’ − Xd «(Xd’ − Xls) 2 {ψ1d − Eq’ − Id (Xd’ − Xls )})]
Точно так же переходная ЭДС из-за потоковой передачи в демпферной катушке оси q (3.25) косвенно пропорциональна временной постоянной времени холостого хода оси q.
(3,25) dEd’dt = 1Tq0 ‘[- Ed’ + (Xq − Xq ‘) (- Iq + Xq’ − Xq’ ‘(Xq’ − Xls) 2 {−ψ2q − Ed’ + Iq (Xq ‘) −Xls)})]
Субпереходная ЭДС из-за потоковой передачи в демпферной катушке по оси q (3.26) косвенно пропорциональна субпереходной постоянной времени холостого хода по оси q.
(3.26) dψ2qdt = 1Tq0 «(- ψ2q − Ed ‘+ Iq (Xq’ − Xls))
Субпереходная ЭДС из-за потоковой связи в демпферной катушке оси d (3.27) косвенно пропорциональна субпереходной d -осная постоянная времени холостого хода.
(3.27) dψ1ddt = 1Td0 » (- ψ1d + Eq ‘+ Id (Xd’ − Xls))
Используя четыре переменных состояния и напряжение на клеммах генератора, которое является входом в модель синхронной машины, q- и d Компоненты тока статора -оси могут быть рассчитаны, как показано в (3.28) и (3.29), соответственно.
(3,28) Iq = RsRs2 + −Xd ″ 2 (Eq′Xd ″ −XlsXd′ − Xls + ψ1dXd′ − Xls ″ Xd′ − Xls − Vq) + Xd ″ Rs2 + −Xd ″ 2 (Ed′Xq ″ −XlsXq ′ −Xls − ψ2qXq′ − Xq ″ Xq′ − Xls − Vd)
(3.29) Id = −Xd ″ Rs2 + −Xd ″ 2 (Eq′Xd ″ −XlsXd′ − Xls + ψ1dXd′ − Xls ″ Xd′− Xls − Vq) + RsRs2 + −Xd ″ 2 (Ed′Xq ″ −XlsXq′ − Xls − ψ2qXq′ − Xq ″ Xq′ − Xls − Vd)
Синхронные машины используют регуляторы для регулирования частоты системы во время изменений в поколении — баланс нагрузки, регулируя входной крутящий момент генератора.Простой губернатор может быть представлен в (3.30).
(3.30) dTmdt = 1Tg (Tm2 − Tm − ωr − ωsRgov)
В синхронных машинах используются системы возбуждения для регулирования напряжения на шине генератора путем регулирования напряжения поля генератора. Простая статическая система возбуждения может быть представлена в (3.31).
(3,31) dEfddt = 1Ta (KaEt − KaVref − Efd)
- δ
-
Угол ротора генератора
- ωs
-
Синхронная скорость
Синхронная скорость
- D
-
Самозатухающий
- Переходная ЭДС из-за потоковой связи поля
- Efd
-
Напряжение поля
- Rs
-
Сопротивление якоря EMF
- ψ1 Демпфер оси d
- Id
-
Составляющая тока статора по оси d
- Vd
-
Составляющая по оси d напряжения на клеммах генератора
- Xd, Xd ′, Xd ″
-
Синхронный, переходный и субпереходные реактивные сопротивления оси d
- Tdo ‘, Tdo ″
-
Переходные и субпереходные постоянные времени холостого хода оси d
- K a
-
Статическое усиление возбуждения
- Et
-
Величина напряжения генератора
- Tg
-
Постоянная времени регулятора
- Rgov
-
Угловая скорость регулятора 14
ωbБазовое значение скорости
- Tm
-
Механический крутящий момент
- Te
-
Электрический крутящий момент
- Ed ′
-
Переходная ЭДС из-за потокосцепления в демпферной катушке оси q-90
Реактивное сопротивление утечки якоря
- ψ2q
-
Субпереходная ЭДС из-за потокосцепления в демпфере оси q
- Iq
-
Компонент оси q тока статора
- Компонент оси q
- Vq 901 напряжение на клеммах генератора
- Xq, Xq ′, Xq ″
- Vq 901 напряжение на клеммах генератора
-
Синхронный, переходный Входное и субпереходное реактивное сопротивление оси q
- Tqo ′, Tqo ″
-
Переходные и субпереходные постоянные времени холостого хода оси q
- Ta
-
Постоянная времени статического возбуждения
- Vref
опорное напряжение возбуждения
- Tm2
-
Опорная нагрузка генератора
Список переменных:
Синхронные машины (генератор и двигатель) в двух словах
Конструкция синхронного генератора
В синхронном генераторе на обмотку ротора подается постоянный ток, который производит магнитное поле ротора.Затем ротор генератора вращается первичным двигателем, создавая вращающееся магнитное поле внутри машины. Это вращающееся магнитное поле индуцирует трехфазный набор напряжений в обмотках статора генератора.
В двух словах о теории синхронных машин (генератор и двигатель)Для описания обмоток машины обычно используются два термина: обмотки возбуждения и обмотки якоря. В общем, термин « обмоток возбуждения » применяется к обмоткам, которые создают основное магнитное поле в машине, а термин « обмоток якоря » применяется к обмоткам, на которые индуцируется основное напряжение.
В синхронных машинах обмотки возбуждения находятся на роторе, поэтому термины «обмотки ротора» и «обмотки возбуждения» используются как синонимы. Точно так же термины «обмотки статора» и «обмотки якоря» используются взаимозаменяемо.
Ротор синхронного генератора представляет собой большой электромагнит . Магнитные полюса на роторе могут иметь выступающую или несъемную конструкцию. Термин «выступающий» означает «выступающий» или «выступающий», а выступающий полюс — это магнитный полюс, который выступает из поверхности ротора.
С другой стороны, несимметричный полюс — это магнитный полюс, сконструированный заподлицо с поверхностью ротора.
Рисунок 1 — Несоидальный двухполюсный ротор для синхронной машиныРотор с несимметричным полюсом показан на Рисунке 1, а ротор с явным полюсом показан на Рисунке 2. Роторы с несоциальными полюсами обычно используются для двух- и роторы с четырьмя полюсами , в то время как роторы с явными полюсами обычно используются для роторов с четырьмя или более полюсами .
Поскольку ротор подвергается воздействию изменяющихся магнитных полей, он изготовлен из тонких пластин для уменьшения потерь на вихревые токи.
Рис. 2 — (а) Выступающий шестиполюсный ротор синхронной машины. (b) Фотография выдающегося восьмиполюсного ротора синхронной машины, показывающая обмотки на отдельных полюсах ротора. (e) Фотография одного ярко выраженного полюса перед ротором с еще не установленными обмотками возбуждения. (d) Единственный выступающий полюс, показанный после установки обмоток возбуждения, но до того, как он будет установлен на роторе. В цепь возбуждения ротора должен подаваться постоянный токА. Поскольку ротор вращается, требуется специальное устройство для подачи постоянного тока на его обмотки возбуждения.
Есть два распространенных подхода к подаче этого постоянного тока:
- Подача постоянного тока от внешнего источника постоянного тока на ротор с помощью контактных колец и щеток.
- Подача питания постоянного тока от специального источника постоянного тока, установленного непосредственно на валу синхронного генератора.
Контактные кольца — это металлические кольца, полностью охватывающие вал машины, но изолированные от него. Один конец обмотки ротора постоянного тока привязан к каждому из двух контактных колец на валу синхронной машины.и неподвижная щетка едет по каждому контактному кольцу. «Щетка» представляет собой блок из графитоподобного углеродного соединения , который не проводит электричество, но имеет очень низкое трение. так, чтобы оно не изнашивало контактное кольцо.
Если положительный конец источника постоянного напряжения подсоединен к одной щетке, а отрицательный конец подсоединен к другой, то одно и то же постоянное напряжение будет подаваться на обмотку возбуждения все время, независимо от углового положения или скорости вращения щетки. ротор.
Контактные кольца и щетки создают несколько проблем, когда они используются для подачи постоянного тока на обмотки возбуждения синхронной машины.Они увеличивают объем технического обслуживания машины, так как щетки необходимо регулярно проверять на износ.
Рисунок 3 — Схема бесщеточного возбудителя. Небольшой трехфазный ток выпрямляется и используется для питания цепи возбуждения возбудителя. который находится на статоре. Выход цепи якоря возбудителя (на роторе) затем выпрямляется и используется для подачи тока возбуждения в главную машину.Кроме того, падение напряжения на щетке может быть причиной значительных потерь мощности на машинах с большими токами возбуждения .Несмотря на эти проблемы, контактные кольца и щетки используются на всех меньших синхронных машинах, потому что никакой другой метод подачи постоянного тока возбуждения не является рентабельным.
На более крупных генераторах и двигателях используются бесщеточные возбудители для подачи постоянного тока возбуждения в машину. Бесщеточный возбудитель — это небольшой генератор переменного тока, цепь возбуждения которого установлена на статоре, а цепь якоря — на валу ротора. Трехфазный выход генератора возбудителя выпрямляется до постоянного тока с помощью схемы трехфазного выпрямителя, также установленной на валу генератора, и затем подается в основную цепь возбуждения постоянного тока.
Рисунок 4 — Фотография ротора синхронной машины с бесщеточным возбудителем, установленным на одном валу. Обратите внимание на выпрямительную электронику, видимую рядом с якорем возбудителя.Управляя небольшим постоянным током возбуждения генератора возбудителя (расположенного на статоре), можно регулировать ток возбуждения на главной машине без контактных колец и щеток. Это устройство схематично показано на фиг. 3, а ротор синхронной машины с бесщеточным возбудителем, установленный на том же валу , показан на фиг. 4 выше.
Поскольку между ротором и статором никогда не возникает механических контактов, бесщеточный возбудитель требует гораздо меньшего обслуживания, чем контактные кольца и щетки.
Чтобы сделать возбуждение генератора полностью независимым от каких-либо внешних источников питания, в систему часто включают небольшой пилотный возбудитель. Пилотный возбудитель — это небольшой генератор переменного тока с постоянными магнитами, установленными на валу ротора, и трехфазной обмоткой на статоре. Он вырабатывает мощность для цепи возбуждения возбудителя, который, в свою очередь, управляет цепью возбуждения главной машины.
В двух словах о синхронных машинах (генератор и двигатель)Специальный выпуск: достижения в области вращающихся электрических машин
Уважаемые коллеги,
Трудно представить современное общество без вращающихся электрических машин. Их использование расширяется не только в традиционных областях применения, но и в более новых областях, включая системы преобразования возобновляемой энергии, электрические самолеты, аэрокосмическую промышленность, электромобили, беспилотные двигательные установки, робототехнику и т. Д. Это способствовало достижениям в материалы, методики проектирования, инструменты моделирования и производственные процессы современных электрических машин, которые характеризуются высокой компактностью, малым весом, высокой удельной мощностью, высокой плотностью крутящего момента и высокой надежностью.С другой стороны, растущее использование электрических машин и приводов в более ответственных приложениях подтолкнуло исследования в области мониторинга состояния и отказоустойчивости, что привело к разработке более надежных методов диагностики и более отказоустойчивых машин.
Этот специальный выпуск направлен на представление и распространение самых последних достижений, связанных с теорией, проектированием, моделированием, применением, контролем и мониторингом состояния всех типов вращающихся электрических машин.
Темы, представляющие интерес для публикации, включают, помимо прочего:
- Все аспекты индукционных машин, синхронных машин с постоянными магнитами, синхронных реактивных машин, реактивных машин с переключаемым сопротивлением, бесщеточных машин постоянного тока и новых машин с постоянным магнитом, среди прочего
- Электродвигатели / генераторы для большего количества электрических самолетов, электромобилей и систем преобразования энергии ветра
- Машины для критически важных приложений
- Новые области применения электрических машин
- Машины и приводы многофазные
- Модульные машины
- Отказоустойчивые машины
- Методы мониторинга состояния в режиме онлайн и офлайн
- Оптимальные методики проектирования
- Расширенные подходы к моделированию
- Термический и виброакустический анализ
Проф.Д-р Серхио Крус
Приглашенный редактор
Информация для подачи рукописей
Рукописи должны быть представлены онлайн по адресу www.mdpi.com, зарегистрировавшись и войдя на этот сайт. После регистрации щелкните здесь, чтобы перейти к форме отправки. Рукописи можно подавать до установленного срока. Все статьи будут рецензироваться. Принятые статьи будут постоянно публиковаться в журнале (как только они будут приняты) и будут перечислены вместе на веб-сайте специального выпуска.Приглашаются исследовательские статьи, обзорные статьи, а также короткие сообщения. Для запланированных статей название и краткое резюме (около 100 слов) можно отправить в редакцию для объявления на этом сайте.
Представленные рукописи не должны были публиковаться ранее или рассматриваться для публикации в другом месте (за исключением трудов конференции). Все рукописи тщательно рецензируются в рамках процесса одинарного слепого рецензирования. Руководство для авторов и другая важная информация для подачи рукописей доступна на странице Инструкции для авторов. Energies — это международный рецензируемый журнал с открытым доступом, выходящий раз в полгода, издающийся MDPI.
Пожалуйста, посетите страницу Инструкции для авторов перед отправкой рукописи. Плата за обработку статьи (APC) для публикации в этом журнале с открытым доступом составляет 2000 швейцарских франков. Представленные статьи должны быть хорошо отформатированы и написаны на хорошем английском языке. Авторы могут использовать MDPI Услуги редактирования на английском языке перед публикацией или во время редактирования автора.
синхронных машин, 1.0 кВт — синхронные машины, 1,0 кВт — трехфазные синхронные машины 1 кВт — промышленные машины. 1 кВт — Электроприводы — Электротехника
Опыты проводятся на машинах промышленного образца. Все тестовые машины имеют специальную базу для подключения тестовой системы Machine 1.0. Система тестирования может использоваться для записи характеристик тестируемых машин. Электропитание машин осуществляется либо от сети, либо от специальных лабораторных источников питания.
Цели
- Меры защиты и электробезопасность
- Наладка электрических машин и ввод их в эксплуатацию
- Использование пусковых цепей
- Оценка характеристик электрических машин
Синхронные машины относятся к типичным видам трехфазных машин. В отличие от асинхронных (индукционных) машин, они работают с постоянной скоростью, которая зависит исключительно от частоты вращающегося поля.Следовательно, крутящий момент не влияет на скорость. Помимо их использования в качестве двигателей, например для конвейерных лент, текстильных машин, намоточных машин для бумаги и других намоточных машин они используются в качестве синхронных компенсаторов. При этом используется эффект, при котором как индуктивная, так и емкостная реактивная мощность может отбираться из питающей сети. По этой причине они обычно используются вместо больших конденсаторных батарей для компенсации индуктивной реактивной мощности, возникающей, например, в работе электродвигателей.
Характеристики
- Для защиты от перегрева обмотки статора испытуемых машин оснащены датчиками температуры.
- В случае перегрева испытательная система машины автоматически отключает испытательную машину, тем самым предотвращая ее повреждение.
- Испытуемые машины оснащены клеммной колодкой образовательной конструкции с напечатанной на ней конфигурацией обмотки.
- Концы всех обмоток подключены к клеммной колодке и доступны через 4-миллиметровые безопасные гнезда.
- Компьютерный сбор данных измерений обеспечивает значимые результаты измерений.
- Машины класса мощности 1 кВт обладают мощным и реалистичным рабочим откликом.
- По сравнению с машинами меньшего размера их характеристики демонстрируют отличительные особенности, связанные с дизайном.
Полный комплект оборудования одинаково подходит для экспериментов студентов в лабораториях с низковольтными источниками питания (400 В трехфазный) и для установки на передвижной тележке для демонстрации учителями в классе. Процедуры экспериментов представлены в печатном руководстве.
Целевая группа состоит из практикантов и студентов, изучающих электромашиностроение. Курс предлагает эксперименты на среднем уровне, а также позволяет получить необходимое понимание поведения машин для научной интерпретации на уровне бакалавриата.
Темы по синхронным двигателям
- Роторы с явнополюсными и явнополюсными роторами
- Уравнения напряжения
- Эквивалентная схема и векторная диаграмма
- Работа на холостом ходу и с постоянным трехполюсным коротким замыканием
- Диаграммы локусов и характеристики управления
- Крутящий момент и нагрузка
- Диаграмма Потье и реакция якоря
- Синхронизация и использование нескольких машин параллельно
- Способы пуска синхронных двигателей
- Управление реактивной мощностью
- Мощность
Темы синхронных генераторов
- Генерация напряжения
- Возбуждение синхронных машин
- Эксплуатационная характеристика
- Ток и крутящий момент якоря
- Диаграммы работы и времени торможения
- Запуск и синхронизация
- Однофазные генераторы
Основные компоненты:
Все о синхронных двигателях — что это такое и как они работают
Большинство людей понимают, что электродвигатели используют электроэнергию для создания движения, но немногие знают, сколькими различными способами это можно сделать.
Может показаться излишним создавать новые способы выполнения той же задачи, но у инженеров есть для этого веские основания. Некоторые двигатели питаются от постоянного тока, другие от переменного тока, третьи — от их комбинации, и их конкретный метод передачи энергии уникален для каждого двигателя. В результате существует множество типов двигателей постоянного и переменного тока, каждый из которых имеет свои преимущества в определенных областях применения. В этой статье речь пойдет о двигателях, которые используют как переменный, так и постоянный ток, известных как синхронные двигатели, которые используют электромагнетизм для создания точной выходной энергии вращения.Эта статья призвана объяснить структуру, функции и области применения синхронных двигателей, чтобы каждый, кто хочет использовать одно из этих устройств, имел для этого необходимую информацию.
Что такое синхронные двигатели?
Синхронные двигатели считаются типом двигателей переменного тока, созданным специально для решения ограничений, связанных с асинхронными двигателями, еще одним распространенным классом двигателей переменного тока (более подробную информацию об этих двигателях можно найти в нашей статье об асинхронных двигателях). Асинхронные двигатели, как следует из их названия, используют электромагнитную индукцию для выработки механической энергии; однако их главный недостаток заключается в том, что они испытывают феномен «скольжения».Это «скольжение» представляет собой несоответствие между частотой колебаний переменного тока (вход) и частотой вращения (выход) и является прямым результатом использования эффекта индукции для создания вращения. Обычные асинхронные двигатели, не имеющие особого отношения к большинству применений, не могут использоваться для точно рассчитанных по времени приложений из-за этого скольжения и известны как «асинхронные» двигатели.
С другой стороны, синхронные двигателибыли сконструированы таким образом, что выходная частота вращения в точности равнялась входной частоте переменного тока.Их можно использовать для часов, прокатных станов и даже проигрывателей, потому что их скорость точно пропорциональна переменному току, питающему двигатель. Хотя синхронные двигатели не так мощны и разнообразны, как асинхронные двигатели, они играют жизненно важную роль в любом проекте, требующем точной синхронизации и точной частоты вращения.
Как работают синхронные двигатели?
Как и другие асинхронные двигатели, синхронные двигатели состоят из внешнего статора и внутреннего ротора, которые магнитно взаимодействуют для создания выходного крутящего момента.Как и другие двигатели переменного тока, синхронные двигатели могут питаться от однофазного входа (например, настенные розетки) или от многофазного входа (промышленные / более высокие источники напряжения), в зависимости от размера и области применения. Более подробную информацию об однофазных режимах можно найти в нашей статье об однофазных двигателях.
Статор синхронного двигателя такой же, как и у других асинхронных двигателей, в котором катушки из меди / алюминия проходят через ламинированные листы металла. Эти катушки пропускают переменный ток (ы) для создания вращающегося магнитного поля (RMF).Больше всего они отличаются своими роторами, которые содержат постоянное магнитное поле, создаваемое либо настоящими магнитами, либо источником постоянного тока через катушки ротора. Это постоянное поле имеет свой собственный набор полюсов север-юг, которые в конечном итоге выровняются с полюсами RMF (в парах север-юг), таким образом вызывая точный выходной сигнал вращения, пропорциональный частоте статора. Эти полюса могут выступать из поверхности ротора или находиться в пазах на роторе, и они известны как роторы с явнополюсными и невыпадающими полюсами, соответственно.Однако для запуска должно быть некоторое возбуждение, поскольку разница в скорости между неподвижным ротором и быстрым RMF не позволит их полюсам заблокироваться при запуске. Это достигается разными способами, и в результате синхронные двигатели были разделены на синхронные двигатели без возбуждения и синхронные двигатели с возбуждением по току.
Типы синхронных двигателей
Как описано ранее, синхронные двигатели можно различать на основе того, как их роторы возбуждаются до синхронных скоростей.Существуют синхронные двигатели без возбуждения и синхронные двигатели с возбуждением по току, и в этом разделе кратко рассматриваются различные двигатели каждой из этих категорий.
Двигатели синхронные без возбуждения
Этим синхронным двигателям не требуется напряжение возбуждения для запуска, и в их роторах используются ферромагнитные материалы для взаимодействия со статорами. Они бывают трех основных типов: гистерезисные двигатели, синхронные реактивные двигатели и двигатели с постоянными магнитами, и каждый из них будет кратко объяснен ниже.
В двигателях с гистерезисомиспользуется вал ротора, заключенный в немагнитный материал (обычно алюминий), который имеет слой ферромагнитного материала, покрывающий его, образуя «кольцо гистерезиса». RMF статора индуцирует полюса в этом кольце, но из-за некоторых потерь на гистерезис — или потерь энергии из-за задержки между намагниченностью ферромагнетика и изменяющимся магнитным потоком — магнитный поток ротора будет отставать от потока статора. Эта задержка вызывает угловое разделение между полем ротора и полем статора, вызывая крутящий момент.Это относительно бесшумные двигатели, которые лучше всего подходят для проигрывателей, магнитофонов и другого звукового оборудования.
Двигатели с сопротивлениемиспользуют магнитное притяжение и явление сопротивления для создания движения. Они похожи на шаговые и асинхронные двигатели по конструкции, где статор состоит из выступающих полюсов катушек, которые генерируют магнитное поле. Ротор выполнен из ферромагнитного металла в виде модифицированной беличьей клетки. Ротор имеет выемки, барьеры или пазы, которые совпадают с линиями магнитного поля статора, когда полюса ротора и статора совпадают.При несовпадении магнитное поле проходит через ротор по более длинному пути и вызывает увеличение сопротивления — магнитного аналога электрического сопротивления. Это создает реактивный момент на двигателе, так как ротор хочет достичь некоторого более низкого сопротивления или вернуться в свое выровненное положение. Это позволяет ротору «втягиваться» в синхронные скорости в некоторых конструкциях, обеспечивая точное вращение на выходе. Более подробную информацию можно найти в нашей статье о реактивных двигателях.
В двигателях с постоянными магнитами неудивительно, что в их роторах используются постоянные магниты.которые генерируют постоянный магнитный поток. Это взаимодействует с полюсами RMF статора, которые вызывают вращение на выходе. Эти двигатели должны управляться частотно-регулируемым приводом (VFD), поскольку единственный способ изменить их скорость и крутящий момент — это изменить частоту переменного тока статора. Более подробную информацию можно найти в нашей статье о двигателях с постоянными магнитами.
Двигатели синхронные с токовым возбуждением
Единственный доступный синхронный двигатель с возбуждением от основного тока — это синхронный двигатель с возбуждением от постоянного тока, для которого требуется как вход постоянного, так и переменного тока.Источник постоянного тока поступает на ротор, который содержит обмотки, похожие на статор, и эти обмотки будут создавать постоянное магнитное поле, индуцированное источником постоянного тока. Это возбудит двигатель и заставит его полюса выровняться с RMF статора, вызывая синхронность. Эти двигатели обычно имеют мощность> 1 л.с. и часто называются синхронными двигателями, поскольку такая конструкция ротора очень распространена.
Заявки и критерии выбора
Различные обсуждаемые синхронные двигатели — это просто разные средства для создания синхронной скорости, и они, как правило, могут использоваться в приложениях, где требуется точная скорость.Они не являются самозапускающимися по своей природе, и их не следует выбирать, если требуется самозапуск. Все они имеют повышенный КПД по сравнению с большинством других двигателей переменного и постоянного тока с КПД> 90%. Синхронные двигатели являются предпочтительным выбором для низкоскоростных и высокомощных нагрузок и превосходны в качестве источников питания для дробилок, мельниц и измельчителей. Их скорость остается постоянной независимо от нагрузки, а их скорость может быть изменена только с помощью частотно-регулируемого привода, поскольку входной ток напрямую зависит от выходной скорости. Если требуются регулируемые скорости, подумайте о двигателях с фазным ротором.
Асинхронные двигатели той же мощности и номинального напряжения, как правило, дешевле синхронных двигателей с такими же характеристиками. Это означает, что в большинстве случаев асинхронные двигатели являются предпочтительным выбором для привода машин. Синхронные двигатели способны корректировать потери в распределительной сети и очень полезны для регулирования напряжения. Синхронные двигатели чаще всего используются в больших генераторах или параллельно с асинхронными двигателями, предназначенными для компенсации потерь мощности. Кроме того, их намного сложнее обслуживать, чем асинхронные двигатели, и они требуют более частого обслуживания.
Может показаться, что синхронные двигатели уступают асинхронным двигателям, но без них у нас не было бы часов, проигрывателей, дворников, жестких дисков, сигнальных устройств, записывающих приборов, микроволновых пластин или любого другого синхронизирующего устройства. Точно так же эффективность этих двигателей помогает корректировать неэффективность асинхронных двигателей и обеспечивает средства коррекции потерь при распределении. Они неоценимы для промышленности как по своей способности корректировать мощность, так и по своей точности, и хотя синхронные двигатели дороже и сложнее, чем асинхронные двигатели, они являются еще одной способной машиной, которую могут использовать конструкторы.
Сводка
В этой статье представлено понимание того, что такое синхронные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.electricmastar.com/synchronous-motor/
- https://electricalfundablog.com/synchronous-motor/
- http://www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.
