Что такое синхронный двигатель постоянного тока. Как устроен и работает синхронный двигатель с постоянными магнитами. Каковы преимущества и недостатки таких двигателей. Где применяются синхронные двигатели постоянного тока.
Что такое синхронный двигатель постоянного тока
Синхронный двигатель постоянного тока представляет собой электродвигатель, в котором ротор вращается синхронно с вращающимся магнитным полем статора. Основные особенности такого двигателя:
- Ротор содержит постоянные магниты вместо обмоток
- Статор имеет обмотки, создающие вращающееся магнитное поле
- Скорость вращения ротора всегда равна скорости вращения магнитного поля статора
- Для питания используется постоянный ток, преобразуемый в переменный с помощью электронного коммутатора
Таким образом, синхронный двигатель постоянного тока сочетает в себе принципы работы синхронного двигателя переменного тока и коллекторного двигателя постоянного тока.

Устройство синхронного двигателя с постоянными магнитами
Основными конструктивными элементами синхронного двигателя постоянного тока являются:
- Статор с обмотками, создающими вращающееся магнитное поле
- Ротор с постоянными магнитами
- Электронный коммутатор для преобразования постоянного тока в переменный
- Датчики положения ротора
- Система управления
Статор обычно имеет трехфазную обмотку, как у асинхронного двигателя. Ротор содержит мощные постоянные магниты из редкоземельных материалов. Электронный коммутатор подает на обмотки статора импульсы тока в определенной последовательности, создавая вращающееся магнитное поле.
Принцип работы синхронного двигателя постоянного тока
Работа синхронного двигателя постоянного тока основана на взаимодействии вращающегося магнитного поля статора с полем постоянных магнитов ротора. Основные этапы работы:
- На обмотки статора подаются импульсы тока от электронного коммутатора
- Создается вращающееся магнитное поле статора
- Магнитное поле статора взаимодействует с полем постоянных магнитов ротора
- Ротор начинает вращаться синхронно с полем статора
- Датчики определяют положение ротора
- Система управления корректирует работу коммутатора для поддержания синхронного вращения
За счет электронной коммутации обеспечивается плавное вращение ротора без рывков, характерных для коллекторных двигателей.
Преимущества синхронных двигателей постоянного тока
Основными достоинствами синхронных двигателей с постоянными магнитами являются:
- Высокий КПД (до 95% и выше)
- Компактные размеры и малый вес
- Широкий диапазон регулирования скорости
- Высокая динамика и точность позиционирования
- Отсутствие скользящих контактов
- Низкий уровень шума и вибраций
- Простота конструкции ротора
- Высокая надежность
Эти преимущества делают синхронные двигатели постоянного тока оптимальным выбором для многих применений, требующих точного управления скоростью и моментом.
Недостатки синхронных двигателей постоянного тока
К основным недостаткам синхронных двигателей с постоянными магнитами можно отнести:
- Высокая стоимость постоянных магнитов
- Сложность электронной системы управления
- Необходимость датчиков положения ротора
- Невозможность работы напрямую от сети переменного тока
- Ограниченная перегрузочная способность
- Сложность обслуживания и ремонта
Однако в большинстве случаев преимущества синхронных двигателей постоянного тока перевешивают их недостатки для целевых применений.
Области применения синхронных двигателей постоянного тока
Синхронные двигатели с постоянными магнитами широко используются в следующих областях:
- Промышленные роботы и манипуляторы
- Станки с ЧПУ
- Приводы подач металлорежущих станков
- Сервоприводы
- Электротранспорт (электромобили, электровелосипеды)
- Бытовая техника (стиральные машины, кондиционеры)
- Компьютерная техника (жесткие диски, CD/DVD приводы)
- Медицинское оборудование
Применение синхронных двигателей постоянного тока позволяет повысить точность, энергоэффективность и надежность оборудования во многих отраслях.
Сравнение с другими типами электродвигателей
По сравнению с другими типами электродвигателей синхронные двигатели постоянного тока имеют следующие отличия:
- Выше КПД, чем у асинхронных двигателей
- Меньшие размеры и вес при той же мощности
- Лучшие динамические характеристики, чем у коллекторных двигателей
- Более точное управление скоростью и моментом
- Ниже уровень шума и вибраций
- Выше надежность за счет отсутствия щеточно-коллекторного узла
При этом синхронные двигатели постоянного тока дороже простых асинхронных двигателей и требуют более сложной системы управления.
Перспективы развития синхронных двигателей постоянного тока
Основными направлениями совершенствования синхронных двигателей с постоянными магнитами являются:
- Разработка новых магнитных материалов с улучшенными характеристиками
- Оптимизация конструкции для снижения стоимости
- Совершенствование алгоритмов управления
- Интеграция с силовой электроникой
- Применение новых технологий производства
- Расширение диапазона мощностей
Это позволит еще больше улучшить характеристики синхронных двигателей постоянного тока и расширить области их применения в будущем.
Синхронные электродвигатели | Электротехника и электрооборудование
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 11 из 39
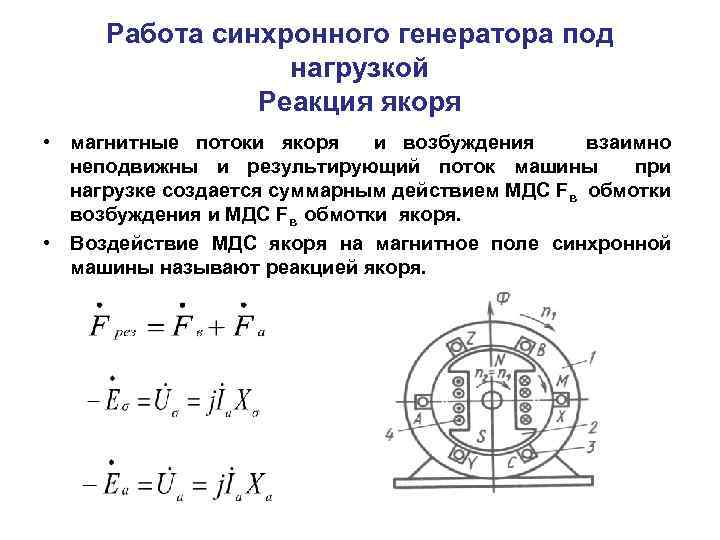
По своему устройству синхронный двигатель аналогичен синхронному генератору, но он имеет дополнительную пусковую обмотку. Принцип действия синхронного двигателя основан на взаимодействии полюсов вращающегося магнитного поля, созданного обмоткой статора, обтекаемой трехфазным током, с магнитными полюсами ротора, обмотки которого питаются постоянным током. Скорость вращения синхронного двигателя постоянна независимо от нагрузки и равна скорости вращения магнитного поля; по этой причине двигатель получил название синхронного; вращение ротора у него совпадает (синхронно) с вращением магнитного поля статора. Механическая характеристика двигателя, т. е. скорость его вращения, зависящая от нагрузки, является абсолютно жесткой, при которой число оборотов постоянно.
Принцип действия синхронного двигателя основан на взаимодействии полюсов вращающегося магнитного поля, созданного обмоткой статора, обтекаемой трехфазным током, с магнитными полюсами ротора, обмотки которого питаются постоянным током. Скорость вращения синхронного двигателя постоянна независимо от нагрузки и равна скорости вращения магнитного поля; по этой причине двигатель получил название синхронного; вращение ротора у него совпадает (синхронно) с вращением магнитного поля статора. Механическая характеристика двигателя, т. е. скорость его вращения, зависящая от нагрузки, является абсолютно жесткой, при которой число оборотов постоянно.
 Некоторые типы синхронных двигателей пускают в ход с помощью других двигателей.
Некоторые типы синхронных двигателей пускают в ход с помощью других двигателей.При холостом ходе оси полюсов ротора и вращающего поля статора двигателя совпадают. При увеличении нагрузки двигателя происходит сдвиг оси полюсов ротора относительно полюсов поля статора на угол φ и при некоторой максимальной нагрузке двигатель выпадает из синхронизма и останавливается в результате слабого взаимодействия между полюсами ротора и статора, обусловленного значительным расстоянием между ними. Максимальный (опрокидывающий) момент синхронного двигателя в 2,5-3 раза превышает номинальный его момент при нормальном токе возбуждения. Изменение угла между осями полюсов ротора и статора приводит к изменению угла сдвига фаз между напряжением и электродвижущей силой синхронного двигателя.
Регулирование cos φ синхронного двигателя достигается изменением величины постоянного тока возбуждения машины, при определенной величине которого можно получить значение коэффициента мощности, равное единице.

В отличие от двигателей постоянного тока, у которых при изменении тока возбуждения изменяется скорость вращения, у синхронных двигателей скорость остается постоянной, не зависящей от тока возбуждения. Однако при этом в больших пределах может изменяться ток статора синхронного двигателя при постоянной нагрузке на его валу и постоянной потребляемой мощности. При постоянной потребляемой мощности двигателя Р — ]/3/U cos φ и постоянной! приложенном напряжении U ток I будет зависеть от cos φ, т. е. при уменьшении cos φ ток будет увеличиваться. В то же время угол φ сдвига фаз между напряжением и током двигателя зависит от тока его возбуждения.
Рис. 7.17. U-образная кривая зависимости рабочего тока синхронного двигателя от тока возбуждения
Влияние величины тока возбуждения на угол сдвига фаз и на величину тока двигателя при постоянной нагрузке на графике имеет вид U-образной кривой (рис. 7.17). Из графика видно, что при уменьшении тока возбуждения ниже номинальной величины ток в цепи статора возрастает (левая часть кривой), но при этом угол сдвига фаз положителен φ > 0, т.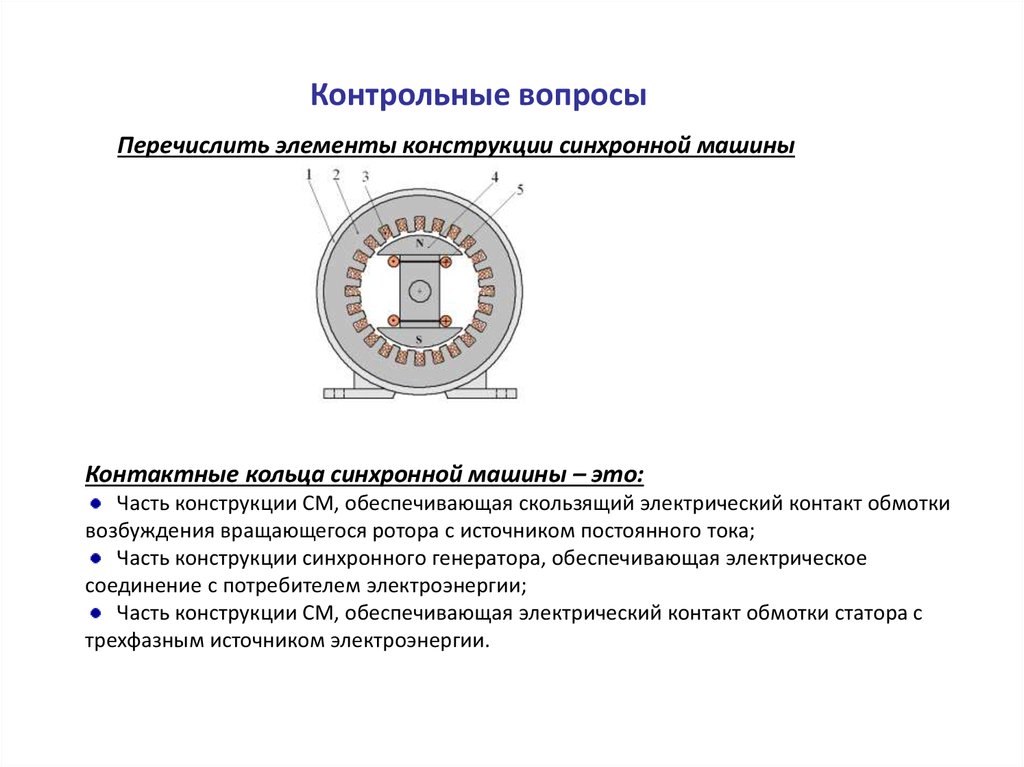
Таким образом, перевозбужденный синхронный двигатель работает подобно емкости, включенной в цепь данной установки, что имеет большое практическое значение для улучшения коэффициента мощности (cos φ) установки.
По указанным причинам за последние годы расширяется применение синхронных двигателей в промышленности и на строительстве, где они применяются для привода компрессорных и насосных установок, а также для привода камнедробилок и экскаваторов.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
 org/ListItem»> Книги
org/ListItem»> Книги - Учеба
- Теория автоматического управления, к курсовому проектированию
Еще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
9.3. Электродвигатели переменного тока — Энергетика: история, настоящее и будущее
Поскольку направление вращения электродвигателя не зависит от направления доставляемого ему тока, то каждый электродвигатель можно приводить в движение и переменным током. Однако в этом случае значительно уменьшается его мощность. Причина этого заключается в том, что переменный ток, проходя по обмотке электромагнитов, создает в сплошных сердечниках так называемые токи Фуко, на образование которых уходит значительная часть доставляемой к двигателю электрической энергии. Кроме того, у двигателей постоянного тока энергия возбуждения электромагнитов расходуется только один раз в начале действия, после чего намагничивание сердечников остается неизменным. В двигателе же переменного тока сердечники перемагничиваются при каждой перемене направления тока, на что затрачивается часть энергии. Уменьшить потери от токов Фуко пытались, делая сердечник не сплошным, а состоящим из отдельных изолированных друг от друга металлических полос. Однако это не дало приемлемого результата, а практическое применение поначалу получили лишь синхронные двигатели переменного тока.
Кроме того, у двигателей постоянного тока энергия возбуждения электромагнитов расходуется только один раз в начале действия, после чего намагничивание сердечников остается неизменным. В двигателе же переменного тока сердечники перемагничиваются при каждой перемене направления тока, на что затрачивается часть энергии. Уменьшить потери от токов Фуко пытались, делая сердечник не сплошным, а состоящим из отдельных изолированных друг от друга металлических полос. Однако это не дало приемлемого результата, а практическое применение поначалу получили лишь синхронные двигатели переменного тока.
Особенность действия первых синхронных электродвигателей переменного тока состояла в том, что для поддержания вращения двигателя ему предварительно необходимо сообщить определенный вращательный момент, величина которого определялась частотой переменного тока. После этого переменный ток будет поддерживать частоту вращения двигателя, синхронную с частотой переменного тока. Если после этого придать двигателю тормозной момент, то в зависимости от величины этого момента вращение может либо восстановиться, либо постепенно затухнуть. Именно такой синхронный двигатель переменного тока «Ганца и К о» приведен на рис. 9.24.
Именно такой синхронный двигатель переменного тока «Ганца и К о» приведен на рис. 9.24.
Он состоит из кольцеобразного многополюсного магнита с изменяющимися под действием переменного тока полярностями, а также расположенного на оси вращающегося звездообразного электромагнита. Для возбуждения этого подвижного электромагнита рабочий переменный ток двигателя преобразуется в постоянный с помощью расположенного на оси специального коммутатора с токосъемными угольными щетками. В момент начального пуска такой двигатель приходит в действие как двигатель постоянного тока. И лишь при достижении им скорости, соответствующей синхронному ходу, начинает работать как синхронный двигатель переменного тока. Такая конструкция обеспечивала, по данным фирмы «Ганца и К о», коэффициент полезного действия до 80%, чего двигатели постоянного тока не достигали даже приблизительно. Кроме того, двигатель «Ганца и К о» не изменял своей скорости вращения при перемене нагрузки на валу, изменялась лишь величина потребляемого тока.
Рис. 9.24. Синхронный двигатель переменного тока «Ганца и Ко»
Тем не менее, таким синхронным двигателям переменного тока присущ тот недостаток, что синхронность хода должна быть установлена до принятия нагрузки, после чего двигатель готов начать работу. При значительных перегрузках синхронность хода нарушалась, вплоть до полной остановки двигателя, что весьма ограничивало область его применения.
В 1870 г. была разработана конструкция асинхронных двигателей переменного тока, лишенных вышеуказанного недостатка. Появление такого двигателя, еще называемого индукционным, позволило при наличии систем распределения и трансформации переменного тока необыкновенно расширить сферу практического применения электрической энергии. В очень упрощенном виде принцип действия индукционных двигателей переменного тока основан на эффекте возникновения вращающегося магнитного поля, получаемого от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода (рис. 9.25).
К открытию эффекта вращающегося магнитного поля в современном его понимании пришли независимо друг от друга итальянский ученый Галилео Феррарис и сербский ученый и изобретатель Николо Тесла. Способ получения вращающегося магнитного поля Феррарис нашел в 1885 году, а впервые сообщил о своем открытии в докладе Туринской академии наук в марте 1888 года. Двумя месяцами позже, в мае того же года, с изложением существа своих открытий в Американском институте инженеров-электриков выступил Тесла, хотя идея бесколлекторного электродвигателя переменного тока у него появилась ещё в 1882 году.
Способ получения вращающегося магнитного поля Феррарис нашел в 1885 году, а впервые сообщил о своем открытии в докладе Туринской академии наук в марте 1888 года. Двумя месяцами позже, в мае того же года, с изложением существа своих открытий в Американском институте инженеров-электриков выступил Тесла, хотя идея бесколлекторного электродвигателя переменного тока у него появилась ещё в 1882 году.
Николо Тесла (1856–1943) родился 10 июля 1856 года в селе Смиляны (ранее Австро-Венгрия, теперь Хорватия). В 1878 году окончил Политехнический институт в Граце и в 1880 году – Пражский университет. Работал инженером в Будапеште и Париже. Уехав в 1884 году в Нью-Йорк, Тесла организовал лабораторию и в 1888 году, исходя из принципа вращающегося магнитного поля, построил двухфазные генератор и электродвигатель переменного тока. В 1891 году сконструировал резонансный трансформатор трансформатор Тесла), позволяющий получать высокочастотные колебания напряжения, и первым указал на физиологическое воздействие токов высокой частоты. Он исследовал возможность беспроволочной передачи сигналов и энергии на значительные расстояния. В 1899 году публично продемонстрировал лампы и двигатели, работающие на высокочастотном токе без проводов. Построил радиостанцию в Колорадо и радиоантенну в Лонг-Айленде. Именем Теслы названа единица измерения плотности магнитного потока (магнитной индукции).
Он исследовал возможность беспроволочной передачи сигналов и энергии на значительные расстояния. В 1899 году публично продемонстрировал лампы и двигатели, работающие на высокочастотном токе без проводов. Построил радиостанцию в Колорадо и радиоантенну в Лонг-Айленде. Именем Теслы названа единица измерения плотности магнитного потока (магнитной индукции).
Рис. 9.25. Эффект возникновения вращающегося магнитного поля от действия двух переменных токов, сдвинутых по фазе на 1/4 часть периода
Замечательным свойством двухфазных электрических машин (рис. 9.26) является возможность сообщить движение якорю без непосредственного подвода к нему переменного тока. Тем самым исчезает потребность в использовании скользящих контактов, коммутатора или коллектора. Фирма «Вестингауз», где работал Тесла, построила несколько станций по его системе. Наибольшей по масштабам была Ниагарская гидроэлектростанция, построенная в 1896 году, где были установлены такого рода двухфазные машины переменного тока. Однако экономические и технические трудности использования двухфазной системы привели через некоторое время к полной ее замене на трехфазную.
Однако экономические и технические трудности использования двухфазной системы привели через некоторое время к полной ее замене на трехфазную.
Недостатком электродвигателей Тесла было то, что они имели большое магнитное сопротивление и крайне неблагоприятное распределение намагничивающей силы вдоль воздушного зазора, что приводило к ухудшению характеристик машины. Неудачным оказался и выбор двухфазной системы токов из всех возможных многофазных систем. Встретившиеся экономические и технические трудности задерживали внедрение двухфазной системы в практику.
Рис. 9.26. Асинхронный электродвигатель переменного тока конструкции Тесла
Михаил Осипович Доливо-Добровольский (1862–1919), блестяще окончив курс Одесского реального училища, в 1880 году становится студентом Рижского политехнического института, решив посвятить себя деятельности инженера-механика. За участие в политических выступлениях студентов в марте 1881 года он был исключен из института без права поступления в какое-либо русское высшее учебное заведение.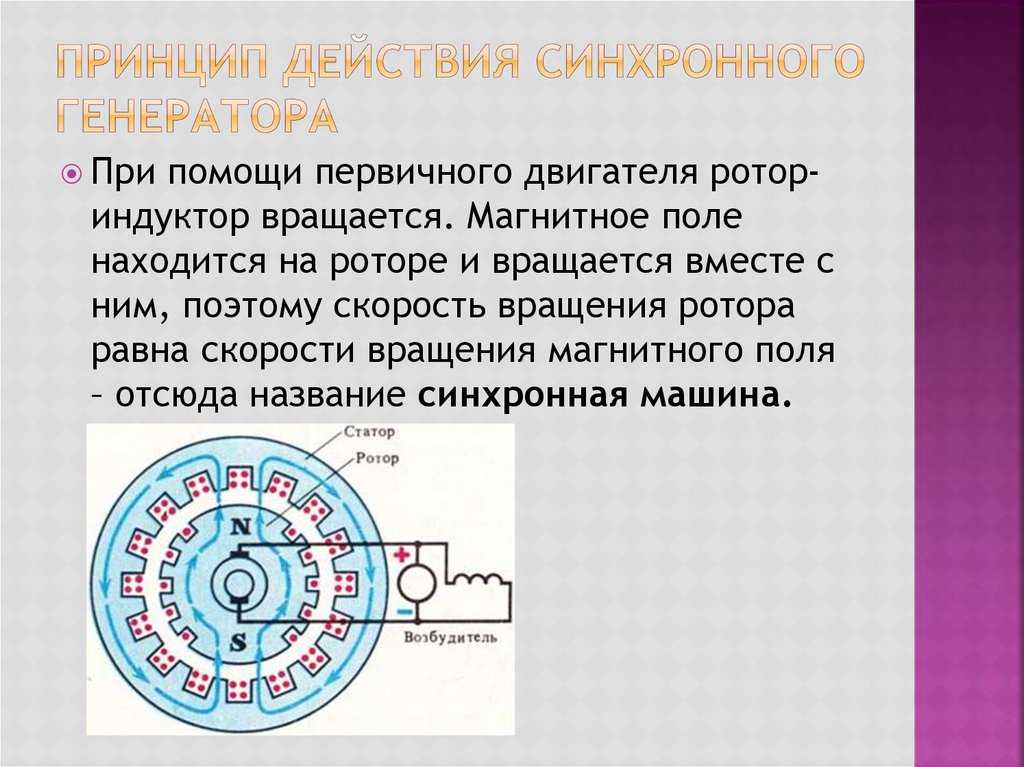 Электротехникой М.О. Доливо-Добровольский заинтересовался ещё в Рижском политехническом институте и при решении вопроса о продолжении своего обучения за пределами России он остановился на Дармштадтском высшем техническом училище. С осени 1881 г. по 1884 г. М.О. Доливо-Добровольский учился на машиностроительном факультете в Дармштадте, специально изучая электротехнику. Уже в ранних студенческих работах проявились выдающиеся инженерные способности ДоливоДобровольского. Он в совершенстве изучил постоянный ток и его применение и на последнем курсе в Дармштадте впервые предложил пусковую схему для шунтового двигателя постоянного тока, что оказало непосредственное и сильное влияние на развитие электрического привода на постоянном токе. В 1884 году, окончив с отличными оценками Дармштадтское высшее техническое училище, он поступил на работу конструктором на заводы электротехнической компании Т. Эдисона (впоследствии фирма AEG; с 1909 г. – директор этой фирмы). В 1887–1888 годах работал над усовершенствованием электромагнитных амперметров и вольтметров для измерения постоянного и переменного токов.
Электротехникой М.О. Доливо-Добровольский заинтересовался ещё в Рижском политехническом институте и при решении вопроса о продолжении своего обучения за пределами России он остановился на Дармштадтском высшем техническом училище. С осени 1881 г. по 1884 г. М.О. Доливо-Добровольский учился на машиностроительном факультете в Дармштадте, специально изучая электротехнику. Уже в ранних студенческих работах проявились выдающиеся инженерные способности ДоливоДобровольского. Он в совершенстве изучил постоянный ток и его применение и на последнем курсе в Дармштадте впервые предложил пусковую схему для шунтового двигателя постоянного тока, что оказало непосредственное и сильное влияние на развитие электрического привода на постоянном токе. В 1884 году, окончив с отличными оценками Дармштадтское высшее техническое училище, он поступил на работу конструктором на заводы электротехнической компании Т. Эдисона (впоследствии фирма AEG; с 1909 г. – директор этой фирмы). В 1887–1888 годах работал над усовершенствованием электромагнитных амперметров и вольтметров для измерения постоянного и переменного токов. Для различного рода измерительных приборов удачно применил принцип двигателя с вращающимся магнитным полем, создал приборы для устранения в телефонах помех от электрических сетей сильных токов, изобрел способ деления напряжения постоянного тока, основанный на применении неподвижной катушки индуктивности, которую назвал делителем напряжения. Последние годы своей жизни М.О. Доливо-Добровольский был занят мыслью о передаче энергии на большие расстояния. Свои взгляды по этому вопросу он изложил в обстоятельном докладе «О пределах возможности передачи энергии на расстояние переменным током». Смерть М.О. Доливо-Добровольского 15 ноября 1919 года прервала его работы в самом разгаре.
Для различного рода измерительных приборов удачно применил принцип двигателя с вращающимся магнитным полем, создал приборы для устранения в телефонах помех от электрических сетей сильных токов, изобрел способ деления напряжения постоянного тока, основанный на применении неподвижной катушки индуктивности, которую назвал делителем напряжения. Последние годы своей жизни М.О. Доливо-Добровольский был занят мыслью о передаче энергии на большие расстояния. Свои взгляды по этому вопросу он изложил в обстоятельном докладе «О пределах возможности передачи энергии на расстояние переменным током». Смерть М.О. Доливо-Добровольского 15 ноября 1919 года прервала его работы в самом разгаре.
Рис. 9.27. Двигатель трехфазного переменного тока мощностью в 100 л.с. конструкции Доливо-Добровольского
Рис. 9.28. Отделение электродвигателей переменного тока на заводе Шуккерта в Нюрнберге
Более совершенной электрической системой оказалась трехфазная. Наибольшая заслуга среди ученых и инженеров разных стран (немец Ф. Хазельвандер, француз М. Депре, американец Ч. Бредли) принадлежит русскому электротехнику Михаилу Осиповичу ДоливоДобровольскому, сумевшему придать своим работам практический характер, создавшему трехфазные асинхронные двигатели, трансформаторы, разработавшему четырехи трехпроводную цепи. Его по праву считают основоположником трехфазных систем.
Хазельвандер, француз М. Депре, американец Ч. Бредли) принадлежит русскому электротехнику Михаилу Осиповичу ДоливоДобровольскому, сумевшему придать своим работам практический характер, создавшему трехфазные асинхронные двигатели, трансформаторы, разработавшему четырехи трехпроводную цепи. Его по праву считают основоположником трехфазных систем.
Доливо-Добровольский усовершенствовал двигатель Тесла, используя три сдвинутых по фазе переменных тока вместо двух. В 1888 году он построил первый трехфазный генератор переменного тока мощностью около 3 кВт, от которого привел в действие свой первый трехфазный двигатель со статором в виде кольца Грамма и ротором в виде сплошного медного цилиндра. Дальнейшие работы привели его к построению асинхронного трехфазного двигателя с ротором из литого железа с насаженным полым медным цилиндром. В 1889 году конструкция асинхронного электродвигателя была значительно улучшена применением ротора типа «беличьего колеса». Опытная установка такой машины поражала всех электротехников своими небольшими размерами при заданной мощности трехфазного электродвигателя. На рис. 9.27 показан двигатель трехфазного переменного тока мощностью в 100 л.с. конструкции ДоливоДобровольского.
На рис. 9.27 показан двигатель трехфазного переменного тока мощностью в 100 л.с. конструкции ДоливоДобровольского.
Одновременно М.О. Доливо-Добровольский исследовал соединения звездой и треугольником, экспериментировал с токами различных напряжений и с машинами, имеющими разное число пар полюсов, разработал все элементы трехфазных цепей переменного тока: трансформаторы трехфазного тока (1890), пусковые реостаты, измерительные приборы, схемы включения генераторов и двигателей звездой и треугольником.
На рис. 9.28 приведен общий вид цеха по производству электродвигателей переменного тока на заводе Шуккерта в Нюрнберге. С изобретением трехфазной системы переменного тока такие электродвигатели в дальнейшем получили массовое распространение во всем мире.
что нужно знать
You are here: Home / Новые статьи / Основы синхронного двигателя: что нужно знать
Дэвид Херрес 5 комментариев
Вращающиеся электродвигатели включают взаимодействие двух магнитных полей, статора и ротора. В щеточном двигателе постоянного тока постоянное напряжение прикладывается к статору, создавая стационарное магнитное поле. Постоянный ток также подается на коммутатор, прикрепленный к якорю, входящему в состав ротора. Поскольку коммутатор сегментирован, полярность тока, подаваемого на обмотку ротора, периодически меняется на противоположную. В результате полярность магнитного поля, связанного с ротором, также меняется на противоположную.
В щеточном двигателе постоянного тока постоянное напряжение прикладывается к статору, создавая стационарное магнитное поле. Постоянный ток также подается на коммутатор, прикрепленный к якорю, входящему в состав ротора. Поскольку коммутатор сегментирован, полярность тока, подаваемого на обмотку ротора, периодически меняется на противоположную. В результате полярность магнитного поля, связанного с ротором, также меняется на противоположную.
Постоянное чередование одного магнитного поля по отношению к другому вызывает вращение. Пульсирующее поле может быть связано либо со статором, либо с ротором, тогда как другое поле является статичным. Статическое поле может создаваться постоянными магнитами или постоянным напряжением. Вы могли бы установить батареи на ротор, но никто бы этого не сделал. Вместо того, чтобы создаваться коммутатором, который является частью ротора, коммутация может быть внешней, от электронного или механического контроллера.
Другой вариант — позволить утилите сделать всю работу. Электроснабжение большей части мира осуществляется переменным током с частотой 50 или 60 Гц. При просмотре через осциллограф это достаточно чистая синусоида, являющаяся следствием вращательного характера генерирующего оборудования.
Электроснабжение большей части мира осуществляется переменным током с частотой 50 или 60 Гц. При просмотре через осциллограф это достаточно чистая синусоида, являющаяся следствием вращательного характера генерирующего оборудования.
Если этот источник переменного тока подается на катушки статора, создается вращающееся магнитное поле. Ротор может иметь постоянные магниты или обмотки, питаемые выпрямленным постоянным током, питаемым через щетку и токосъемное кольцо.
Скорость вращения поля статора называется синхронной скоростью. Частота источника питания и число полюсов машины определяют синхронную скорость. Синхронный двигатель — это двигатель, в котором ротор вращается с той же скоростью, что и вращающееся магнитное поле в статоре. Шаговые двигатели, бесщеточные двигатели постоянного тока, двигатели с переменным сопротивлением, двигатели с переключаемым сопротивлением и гистерезисом, а также щеточные двигатели постоянного тока обычно работают как синхронные двигатели.
Название «синхронный» для двигателей происходит от того факта, что ротор движется синхронно с магнитным полем статора, создаваемым при последовательном включении обмотки статора. В этом примере вал двигателя вращается против часовой стрелки, следуя за полями.
В этом примере вал двигателя вращается против часовой стрелки, следуя за полями. Напротив, асинхронный двигатель — это двигатель, в котором скорость вращения ротора меньше скорости синхронной. Асинхронные двигатели являются асинхронными двигателями. В асинхронном двигателе изменяющееся магнитное поле индуцирует токи в роторе, поэтому ротор всегда будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре. Разница между этими двумя скоростями называется «скольжением» и обычно выражается в процентах от синхронной скорости.
Существует множество разновидностей синхронных двигателей, но во всех случаях их роторы вращаются с синхронной скоростью статора. Возможно, наиболее широко используемым синхронным двигателем является бесщеточный двигатель постоянного тока. Его статор напоминает асинхронный двигатель, но ротор состоит из постоянных магнитов, а не из токопроводящих стержней.
Небольшие синхронные двигатели переменного тока служат в часах и таймерах. Поскольку скорость якоря синхронизирована с частотой питания, подаваемого коммунальным предприятием, обеспечивается точность хронометража. Коммунальные предприятия внимательно следят за своей производительностью, и если частота (которая зависит от скорости их ротора) вообще отклоняется, они регулируют скорость, чтобы вернуться в нужное русло.
Поскольку скорость якоря синхронизирована с частотой питания, подаваемого коммунальным предприятием, обеспечивается точность хронометража. Коммунальные предприятия внимательно следят за своей производительностью, и если частота (которая зависит от скорости их ротора) вообще отклоняется, они регулируют скорость, чтобы вернуться в нужное русло.
Синхронные двигатели также имеют важное дополнительное преимущество: их можно использовать для коррекции коэффициента мощности. Возбуждение синхронного двигателя можно варьировать, что позволяет ему работать с отстающим, опережающим или единичным коэффициентом мощности. При минимальном токе возбуждения коэффициент мощности равен единице. В промышленных условиях большие синхронные двигатели, помимо выполнения полезной работы, могут служить для изменения вредного коэффициента мощности. Часто неработающие синхронные двигатели остаются в сети только потому, что это дешевле, чем использование конденсаторов для коррекции коэффициента мощности.
Из-за инерции покоя большой синхронный двигатель с тяжелым якорем не запускается самостоятельно. Такие двигатели могут быть оснащены внутренними индукционными обмотками или внешним мотором-пони, чтобы разогнать их до нужной скорости.
Такие двигатели могут быть оснащены внутренними индукционными обмотками или внешним мотором-пони, чтобы разогнать их до нужной скорости.
Рубрики: Новые статьи
Что такое синхронный двигатель? — Определение, конструкция, работа и ее особенности
Определение: Двигатель, работающий с синхронной скоростью, называется синхронным двигателем. Синхронная скорость – это постоянная скорость, при которой двигатель генерирует электродвижущая сила . Синхронный двигатель используется для преобразования электрической энергии в механическую.
Конструкция синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя. Статор становится неподвижным, и он несет якорную обмотку двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе индуцируется ЭДС . Вращатель несет обмотки возбуждения. Основной поток поля наводится в роторе. Ротор сконструирован двумя способами, то есть ротор с явно выраженными полюсами и ротор с неявнополюсными полюсами.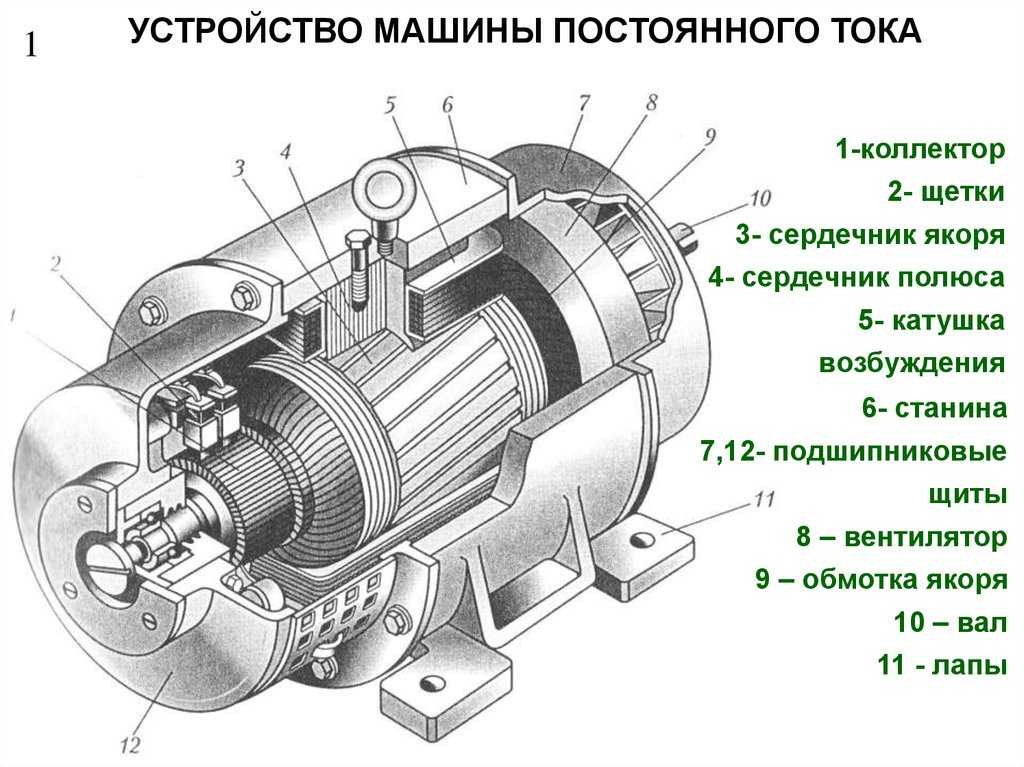
В синхронном двигателе используется явнополюсный ротор. Слово явно выраженное означает полюса ротора, направленные к обмоткам якоря . Ротор синхронного двигателя выполнен с пластинами из стали. Пластины уменьшают потери на вихревые токи, возникающие в обмотке трансформатора. Явнополюсный ротор в основном используется для проектирования средне- и низкоскоростных двигателей. Для получения высокоскоростного цилиндрического ротора в двигателе используется.
Синхронный двигатель в рабочем состоянии
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — неподвижная часть, а ротор — вращающаяся часть машины. Трехфазное питание переменного тока подается на статор двигателя.
Статор и ротор возбуждаются отдельно. Возбуждение – это процесс наведения магнитного поля на части двигателя с помощью электрического тока.
Когда на статор подается трехфазное питание, между статором и зазором ротора возникает вращающееся магнитное поле. Поле с движущимися полярностями известно как вращающееся магнитное поле. Вращающееся магнитное поле возникает только в многофазной системе. Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюса.
Поле с движущимися полярностями известно как вращающееся магнитное поле. Вращающееся магнитное поле возникает только в многофазной системе. Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюса.
Ротор возбуждается от источника постоянного тока. Источник постоянного тока индуцирует северный и южный полюса ротора. Поскольку источник постоянного тока остается постоянным, поток, индуцируемый на роторе, остается прежним. Таким образом, поток имеет фиксированную полярность. Северный полюс развивается на одном конце ротора, а южный полюс развивается на другом конце.
Переменный ток синусоидальный. Полярность волны меняется в каждом полупериоде, т. е. волна остается положительной в первом полупериоде и становится отрицательной во втором полупериоде. Положительный и отрицательный полупериод волны развивает северный и южный полюсы на статоре соответственно.
Когда ротор и статор имеют один и тот же полюс на одной стороне, они отталкиваются друг от друга. Если у них противоположные полюса, они притягиваются друг к другу. Это легко понять с помощью рисунка, показанного ниже: Ротор притягивается к полюсу статора в течение первого полупериода питания и отталкивается во время второго полупериода. Таким образом, ротор становится пульсирующим только в одном месте. Это причина, по которой синхронный двигатель не запускается самостоятельно.
Если у них противоположные полюса, они притягиваются друг к другу. Это легко понять с помощью рисунка, показанного ниже: Ротор притягивается к полюсу статора в течение первого полупериода питания и отталкивается во время второго полупериода. Таким образом, ротор становится пульсирующим только в одном месте. Это причина, по которой синхронный двигатель не запускается самостоятельно.
Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Когда ротор начинает вращаться с синхронной скоростью, первичный двигатель отключается от двигателя. А на ротор подается постоянный ток, из-за чего на его концах развиваются северный и южный полюса
Северный и южный полюса ротора и статора сцепляются друг с другом. Таким образом, ротор начинает вращаться со скоростью вращающегося магнитного поля.