Как устроены системы телеуправления электрическими подстанциями. Какие технологии используются для дистанционного контроля и управления энергообъектами. Почему телемеханика критически важна для надежной работы энергосистемы.
Назначение и основные функции систем телеуправления в энергетике
Системы телеуправления и телесигнализации предназначены для дистанционного контроля и управления объектами электроэнергетики, такими как подстанции и линии электропередачи. Основные функции этих систем включают:
- Передачу команд управления на удаленные объекты
- Сбор и передачу информации о состоянии оборудования
- Измерение и передачу основных параметров режима работы
- Сигнализацию об аварийных ситуациях
- Архивирование данных о работе энергообъектов
Применение систем телеуправления позволяет осуществлять централизованное управление энергосистемой, повышает оперативность и надежность ее работы.
Структура и основные компоненты систем телеуправления подстанциями
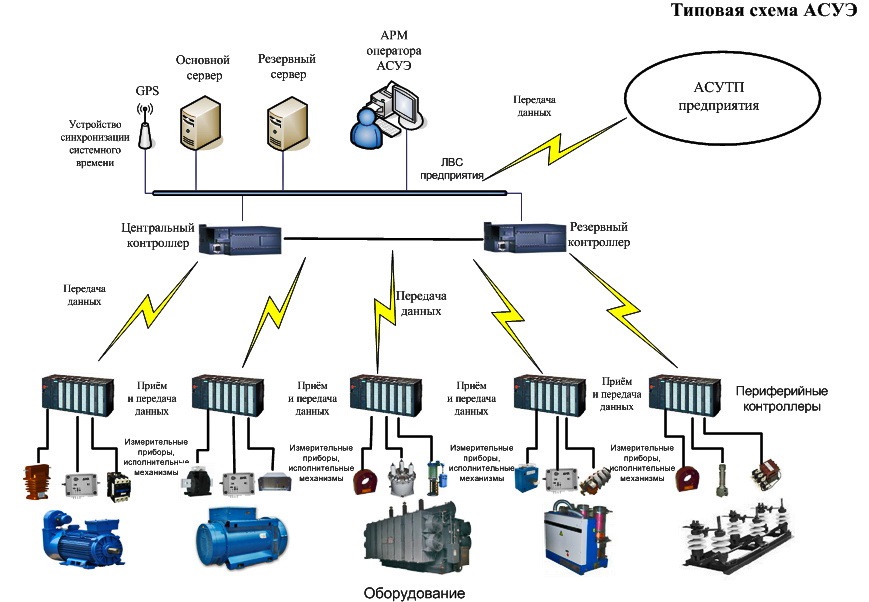
Типовая система телеуправления подстанцией включает следующие основные компоненты:

- Пункт управления (ПУ) — центральный диспетчерский пункт
- Контролируемые пункты (КП) на подстанциях
- Каналы связи между ПУ и КП
- Датчики и исполнительные механизмы на контролируемых объектах
- Устройства сопряжения с объектом (УСО)
- Программно-технические комплексы обработки информации
На пункте управления размещается оборудование для обработки и отображения информации, рабочие места диспетчеров. Контролируемые пункты оснащаются аппаратурой для сбора данных и выполнения команд управления.
Принципы передачи информации в системах телемеханики
Передача информации между пунктом управления и контролируемыми пунктами осуществляется по каналам связи с использованием различных методов:
- Временное разделение каналов
- Частотное разделение каналов
- Кодовое разделение каналов
Применяются цифровые и аналоговые методы передачи. Для повышения помехозащищенности используются различные виды кодирования информации. Скорость передачи данных в современных системах достигает сотен килобит в секунду.
Технологии и протоколы, используемые в системах телеуправления
В современных системах телеуправления применяются следующие технологии и стандарты:

- Протоколы МЭК 60870-5-101/104 для обмена данными
- Оптоволоконные, радиорелейные и спутниковые каналы связи
- Промышленные сети Modbus, Profibus
- SCADA-системы для визуализации и управления
- Облачные технологии для хранения и обработки данных
Широко используются микропроцессорные устройства и программируемые логические контроллеры. Это позволяет создавать гибкие и масштабируемые системы.
Особенности реализации телеуправления на подстанциях 110/10 кВ
При организации телеуправления подстанциями 110/10 кВ учитываются следующие особенности:
- Управление коммутационными аппаратами (выключателями, разъединителями)
- Контроль положения коммутационных аппаратов
- Измерение основных электрических параметров (токи, напряжения, мощности)
- Сигнализация о аварийных отключениях и неисправностях оборудования
- Управление устройствами РЗА и противоаварийной автоматики
Особое внимание уделяется обеспечению надежности и безопасности дистанционного управления высоковольтным оборудованием. Применяются специальные алгоритмы блокировок и подтверждения команд.

Алгоритмы работы контролируемого пункта и пункта управления
Алгоритм работы контролируемого пункта включает следующие основные этапы:
- Сбор информации с датчиков и преобразователей
- Первичная обработка и фильтрация данных
- Формирование пакетов телеизмерений и телесигнализации
- Передача информации на пункт управления
- Прием и дешифрация команд телеуправления
- Выполнение полученных команд
Алгоритм работы пункта управления состоит из следующих шагов:
- Прием и обработка информации от контролируемых пунктов
- Отображение полученных данных на АРМ диспетчера
- Формирование команд управления по запросу оператора
- Передача команд на контролируемые пункты
- Контроль выполнения команд
- Архивирование данных
Выбор аппаратных средств для реализации системы телеуправления
При выборе контроллеров и других аппаратных средств для системы телеуправления учитываются следующие факторы:
- Возможность работы с внешним ОЗУ для упрощения взаимодействия с модемом и АЦП
- Наличие достаточного количества портов ввода-вывода
- Поддержка необходимых интерфейсов (RS-232, RS-485, Ethernet и др.)
- Наличие встроенных АЦП и ЦАП
- Возможность работы в промышленных условиях
- Поддержка требуемых протоколов обмена данными
Часто применяются специализированные промышленные контроллеры от таких производителей как Siemens, Schneider Electric, ABB и др. Они обеспечивают высокую надежность и широкий набор коммуникационных возможностей.
Перспективы развития систем телеуправления в электроэнергетике
Основные направления развития систем телеуправления в электроэнергетике включают:
- Внедрение технологий промышленного интернета вещей (IIoT)
- Применение искусственного интеллекта для анализа данных
- Создание цифровых двойников энергообъектов
- Интеграция с системами управления Smart Grid
- Повышение кибербезопасности
- Развитие беспроводных технологий связи (5G, спутниковая связь)
Это позволит повысить эффективность управления энергосистемами, обеспечить их гибкость и адаптивность к меняющимся условиям работы. Ключевой тенденцией становится цифровизация всех процессов передачи и распределения электроэнергии.
Телеуправление в электроэнергетике
Любая электрическая сеть, то есть будь то сеть небольшого населенного пункта или целого региона, состоит из нескольких объектов, которые тесно взаимосвязаны друг с другом. К таковым объектам относятся подстанции вблизи населенных пунктов, энергетические магистрали, пункты производства и потребления электрической энергии.
Процессы, происходящие между объектами, регулируются специальными диспетчерскими пунктами. Каждый такой пункт выполняет управление большим числом различных подстанций, функционирование которых является автоматическим.
Задачи, которые возложены на объекты электрической сети, безусловно, характеризуются высокой важностью. Следовательно, контроль над ними должен быть постоянным. Управление может осуществляться при помощи двух систем, а именно телеуправление (ТУ) или телесигнализация (ТС).
Более подробно мы расскажем Вам о системе телеуправления.
Как работает система ТУ?
На каждой подстанции имеются собственные распределительные устройства, которые, в свою очередь, оснащены силовыми выключателями. Данные выключатели предназначены для коммутации проходящей и отходящей электрической энергии, которая движется по электролинии. Выключатель взаимосвязан со вторичными блок-контактами, промежуточными реле, а также с реле фиксации. Расположение данных устройств отображается в схеме системы телеуправления. Работают перечисленные приборы в роли датчиков и имеют два состояния: вкл и выкл.
Подстанции оснащаются специальной сигнализирующей аппаратурой, которая предназначена для информирования персонала о состоянии электросхемы. Индикаторами перебоев являются информационные световые табло, звуковые сигналы. Важно отметить, что большую часть времени подстанция выполняет свою работу без людей. Информирование при этом о состоянии функционирования системы ложится на телесигнализацию, которая поступает на пульт дежурного диспетчера.
Работа системы основана на двоичном коде «0» и «1». Одно из значений присваивается положению выключателя. Данное значение поступает через передатчик, который имеет подключение к каналу связи. Канал связи, а он может быть проводным, телефонным или радио-каналом, оснащен пунктом управления энергетическими объектами и приемником. Обработкой сигналов и их преобразованием в нужную для диспетчера информацию занимается именно приемник. По доставленным персоналу сигналам происходит оценка состояния подстанции.
В большинстве случаев получаемых данных не хватает для полной и объективной оценки состояния энергетической системы. Именно поэтому телесигнализация дополняется телеизмерениями. Система ТИ транслирует на пульте управления показания основных измерительных приборов. Схема телеизмерений входит в систему телемеханики.
Используя средства телеуправления диспетчер может оказывать влияние на распределение электрической энергии при помощи специальных средств ТУ. Для этой цели используется собственный передатчик, который выдает в канал связи определенные команды, поступающие с пульта управления. Переданная команда поступает на приемник, а после передается на автоматические приборы и тем самым воздействует на устройства управления силовым выключателем.
Для этой цели используется собственный передатчик, который выдает в канал связи определенные команды, поступающие с пульта управления. Переданная команда поступает на приемник, а после передается на автоматические приборы и тем самым воздействует на устройства управления силовым выключателем.
Какие существуют команды телеуправления?
Команда – это сигнал, который направляет передатчик диспетчера в орган управления подстанции. Команда требует беспрекословного и немедленного исполнения.
Команды передаются адресно, а именно: выключателю (конкретному объекту подстанции) и группе устройств разных подстанций.
Система ТУ и особенности ее эксплуатации
Диспетчер с пункта коммутации выполняет определенные задачи, которые отличаются требованиями обеспечения.
Так, ТУ характеризуется оперативностью работы, что существенно повышает надежность электрического снабжения потребителей. Также сохраняются критерии безопасности, которые необходимы при использовании электроэнергии.
Также сохраняются критерии безопасности, которые необходимы при использовании электроэнергии.
Прежде. чем осуществить присоединение по ТУ диспетчер обязательно должен учесть состояние выключателя на удаленной подстанции (включен/выключен). Это может быть выполнено двумя путями: при помощи защиты от аварии автоматикой повторного включения (АПВ) или же оперативным персоналом, который имеет специальный допуск к работе на подстанцию.
Прежде, чем осуществить коммутацию схемы, необходимо в любом случае выполнить все требования к безопасности и собрать информацию у персонала о состоянии схемы и готовности ее включения в нагрузку.
Недобросовестные работники нередко совершают ошибку и допускают халатность в поиске места, где возникает короткое замыкание, с целью ускорить данный процесс. То есть, персонал включает под нагрузку выключатель после того, как отключат часть потребителей электроэнергии. такой принцип работы чреват неправильным определением поврежденного участка и в электросхеме снова возникает короткое замыкание. Сопутствующими такой оплошности являются высокие нагрузки на используемое оборудование и переток мощности, то есть отклонениями от нормального режима работы.
Сопутствующими такой оплошности являются высокие нагрузки на используемое оборудование и переток мощности, то есть отклонениями от нормального режима работы.
Каким образом происходит взаимодействие между ТУ и ТС?
Команды передаются через две ступени:
- подготовительная;
- исполнительная.
Благодаря такому двухуровневому процессу снижается вероятность возникновения ошибок. Диспетчер имеет возможность проверить введенные данные (адрес и действие) до отправки сигнала передатчиком. Все командные действия системы телеуправления характеризуются определенным положением исполнительных органов на подстанции. Данное положение подтверждается посредством телесигнализации и принимается диспетчером. Команда от телесигнализации будет подаваться до тех пор, пока не будет подтвержден акт приема-передачи (квитирование).
Что такое квитирование?
Это операция, которая выполняется оператором, контролирующим поступающие на пульт сигналы, с целью подтверждения приема сигнала и его дальнейшей фиксации на мнемосхеме. Если на мнемосхему сигнал поступает вновь, то это говорит об изменениях состояния объекта контроля. Например, это отображается частым миганием светосигнальной аппаратуры. Также повторное поступление сигнала говорит о несоответствии положения прибора сигнала состоянию контролируемого объекта.
Если на мнемосхему сигнал поступает вновь, то это говорит об изменениях состояния объекта контроля. Например, это отображается частым миганием светосигнальной аппаратуры. Также повторное поступление сигнала говорит о несоответствии положения прибора сигнала состоянию контролируемого объекта.
Результатом квитирования является занятие сигнальным прибором того места, которое соответствует действительному состоянию объекта контроля.
Квитирование бывает двух видов:
- индивидуальное квитирование, т.е применение индивидуальных ключей;
- общее квитирование, т.е. используется одна общая квитирующая кнопка.
В общем квитировании все зависит от комплекта квитирующих реле.
Существуют ситуации, когда команда системы телеуправления не может быть выполнена. В основе этого лежат различные причины. Система телеуправления в таком случае не должна сохранять данную команду и, соответственно, не допускать ее дублирования.
Последующие действия должны проводиться лишь после полной проверки объекта и его функционирования.
Канал связи и его состояние должно быть постоянно под контролем, который осуществляется специальной аппаратурой. Сигнал, что передается по телесигнализации, должен дойти до конечного пункта без каких-либо перемен. Никакие помехи не должны служить причиной снижения достоверности передаваемых команд.
Вся информация, что передается от ТС, сохраняется в памяти аппаратуры до ее подтверждения на пункте управления. При нарушениях в канале связи команды возобновят свою передачу после восстановления нормального режима работы.
В процессе передачи команды телеуправления нередки ситуации изменений, которые вызывают нежелательное действие электрооборудования или вовсе теряют свой смысл. Во избежание таких случаев или же хотя бы для их минимизации в работу автоматики вводится сообщение телесигнализации предварительно до команд телеуправления.
Оборудования телемеханики могут применять устройства, которые работают как на устаревшей аналоговой базе, так и на современных цифровых технологиях. В последнем случае существенно расширяются возможности электрооборудования, а также улучшается защита от помех в каналах связи.
Вам будет интересно:
- Энергетическая система страны
- Проектирование электроснабжения промышленных предприятий
- Блуждающие токи: причина возникновения и защита от них
Зенитные ракетные комплексы / Библиотека / Арсенал-Инфо.рф
Системы управления зенитными ракетами Системы телеуправления
Системами телеуправления называются такие, в которых движение ракеты определяется наземным пунктом наведения, непрерывно контролирующим параметры траектории цели и ракеты. В зависимости от места формирования команд (сигналов) управления рулями ракеты эти системы делятся на системы наведения по лучу и командные системы телеуправления.
В системах наведения по лучу направление движения ракеты задается с помощью направленного излучения электромагнитных волн (радиоволн, лазерного излучения и др.). Луч модулируется таким образом, чтобы при отклонении ракеты от заданного направления ее бортовые устройства автоматически определяли сигналы рассогласования и вырабатывали соответствующие команды управления ракетой.
Примером применения такой системы управления с телеориентированием ракеты в лазерном луче (после ее вывода в этот луч) является многоцелевой ракетный комплекс ADATS, разработанный швейцарской фирмой «Эрликон» совместно с американской «Мартин Мариэтта». Считается, что такой способ управления по сравнению с командной системой телеуправления первого вида обеспечивает на больших дальностях более высокую точность наведения ракеты на цель.
В командных системах телеуправления команды управления полетом ракеты вырабатываются на пункте наведения и по линии связи (линии телеуправления) передаются на борт ракеты.![]() В зависимости от способа измерения координат цели и определения ее положения относительно ракеты командные системы телеуправления делятся на системы телеуправления первого вида и системы телеуправления второго вида. В системах первого вида измерение текущих координат цели осуществляется непосредственно наземным пунктом наведения, а в системах второго вида — бортовым координатором ракеты с последующей их передачей на пункт наведения. Выработка команд управления ракетой как в первом, так и во втором случае осуществляется наземным пунктом наведения.
В зависимости от способа измерения координат цели и определения ее положения относительно ракеты командные системы телеуправления делятся на системы телеуправления первого вида и системы телеуправления второго вида. В системах первого вида измерение текущих координат цели осуществляется непосредственно наземным пунктом наведения, а в системах второго вида — бортовым координатором ракеты с последующей их передачей на пункт наведения. Выработка команд управления ракетой как в первом, так и во втором случае осуществляется наземным пунктом наведения.
Рис. 3. Командная система телеуправления
Определение текущих координат цели и ракеты (например, дальности, азимута и угла места) осуществляется радиолокационной станцией сопровождения. В некоторых комплексах эта задача решается двумя радиолокаторами, один из которых сопровождает цель (радиолокатор 7 визирования цели), а другой — ракету (радиолокатор 2 визирования ракеты).
Визирование цели основано на использовании принципа активной радиолокации с пассивным ответом, т. е. на получении информации о текущих координатах цели из радиосигналов, отраженных от нее. Сопровождение цели может быть автоматическим (АС), ручным (PC) или смешанным. Чаще всего визиры цели имеют устройства, обеспечивающие различные виды сопровождения цели. Автоматическое сопровождение осуществляется без участия оператора, ручное и смешанное — с участием оператора.
е. на получении информации о текущих координатах цели из радиосигналов, отраженных от нее. Сопровождение цели может быть автоматическим (АС), ручным (PC) или смешанным. Чаще всего визиры цели имеют устройства, обеспечивающие различные виды сопровождения цели. Автоматическое сопровождение осуществляется без участия оператора, ручное и смешанное — с участием оператора.
Для визирования ракеты в таких системах, как правило, применяются радиолокационные линии с активным ответом. На борту ракеты устанавливается приемопередатчик, излучающий ответные импульсы на импульсы запроса, посылаемые пунктом наведения. Такой способ визирования ракеты обеспечивает ее устойчивое автоматическое сопровождение, в том числе и при стрельбе на значительные дальности.
Измеренные значения координат цели и ракеты подаются в устройство выработки команд (УВК), которое может выполняться на базе ЭЦВМ или в виде аналогового счетно-решающего прибора. Формирование команд осуществляется в соответствии с выбранным методом наведения и принятым параметром рассогласования. Выработанные для каждой плоскости наведения команды управления шифруются и радиопередатчиком команд (РПК) выдаются на борт ракеты. Эти команды принимаются бортовым приемником, усиливаются, дешифруются и через автопилот в виде определенных сигналов, определяющих величину и знак отклонения рулей, выдаются на рули ракеты. В результате поворота рулей и появления углов атаки и скольжения возникают боковые аэродинамические силы, которые изменяют направление полета ракеты.
Выработанные для каждой плоскости наведения команды управления шифруются и радиопередатчиком команд (РПК) выдаются на борт ракеты. Эти команды принимаются бортовым приемником, усиливаются, дешифруются и через автопилот в виде определенных сигналов, определяющих величину и знак отклонения рулей, выдаются на рули ракеты. В результате поворота рулей и появления углов атаки и скольжения возникают боковые аэродинамические силы, которые изменяют направление полета ракеты.
Процесс управления ракетой осуществляется непрерывно до ее встречи с целью.
После вывода ракеты в район цели, как правило, с помощью неконтактного взрывателя решается задача выбора момента подрыва боевой части зенитной управляемой ракеты.
Командная система телеуправления первого вида не требует увеличения состава и массы бортовой аппаратуры, обладает большей гибкостью по числу и геометрии возможных траекторий ракеты. Основной недостаток системы — зависимость величины линейной ошибки наведения ракеты на цель от дальности стрельбы. Если, например, величину угловой ошибки наведения принять постоянной и равной 1/1000 дальности, то промах ракеты при дальностях стрельбы 20 и 100 км соответственно составит 20 и 100 м. В последнем случае для поражения цели потребуется увеличение массы боевой части, а следовательно, и стартовой массы ракеты. Поэтому система телеуправления первого вида используется для поражения целей ЗУР на малых и средних дальностях.
Если, например, величину угловой ошибки наведения принять постоянной и равной 1/1000 дальности, то промах ракеты при дальностях стрельбы 20 и 100 км соответственно составит 20 и 100 м. В последнем случае для поражения цели потребуется увеличение массы боевой части, а следовательно, и стартовой массы ракеты. Поэтому система телеуправления первого вида используется для поражения целей ЗУР на малых и средних дальностях.
В системе телеуправления первого вида воздействию помех подвержены каналы сопровождения цели и ракеты и линия радиоуправления. Решение проблемы повышения помехоустойчивости данной системы иностранные специалисты связывают с использованием, в том числе и комплексно, различных по диапазону частот и принципам работы каналов визирования цели и ракеты (радиолокационных, инфракрасных, визуальных и др.), а также радиолокационных станций с фазированной антенной решеткой (ФАР).
Рис. 4. Командная система телеуправления второго вида
Координатор (радиопеленгатор) цели устанавливается на борту ракеты. Он осуществляет слежение за целью и определение ее текущих координат в подвижной системе координат, связанной с ракетой. Координаты цели по каналу связи передаются на пункт наведения. Следовательно, бортовой радиопеленгатор в общем случае включает антенну приема сигналов цели (7), приемник (2), устройство определения координат цели (3), шифратор (4), передатчик сигналов (5), содержащих информацию о координатах цели, и передающую антенну (6).
Он осуществляет слежение за целью и определение ее текущих координат в подвижной системе координат, связанной с ракетой. Координаты цели по каналу связи передаются на пункт наведения. Следовательно, бортовой радиопеленгатор в общем случае включает антенну приема сигналов цели (7), приемник (2), устройство определения координат цели (3), шифратор (4), передатчик сигналов (5), содержащих информацию о координатах цели, и передающую антенну (6).
Координаты цели принимаются наземным пунктом наведения и подаются в устройство выработки команд управления. От станции сопровождения (радиовизира) ракеты в УВК также поступают текущие координаты зенитной управляемой ракеты. Устройство выработки команд определяет параметр рассогласования и формирует команды управления, которые после соответствующих преобразований станцией передачи команд выдаются на борт ракеты. Для приема этих команд, их преобразования и отработки ракетой на ее борту устанавливается такая же аппаратура, как и в системах телеуправления первого вида (7 — приемник команд, 8 — автопилот). Достоинства системы телеуправления второго вида заключаются в независимости точности наведения ЗУР от дальности стрельбы, повышении разрешающей способности по мере приближения ракеты к цели и возможности наведения на цель требуемого числа ракет.
Достоинства системы телеуправления второго вида заключаются в независимости точности наведения ЗУР от дальности стрельбы, повышении разрешающей способности по мере приближения ракеты к цели и возможности наведения на цель требуемого числа ракет.
К недостаткам системы относятся возрастание стоимости зенитной управляемой ракеты и невозможность режимов ручного сопровождения цели.
По своей структурной схеме и характеристикам система телеуправления второго вида близка к системам самонаведения.
Похожие книги из библиотеки
FW 200 CONDOR
Третий номер за 2006 г. периодического научно-популярного издания «История самолета» для членов военно-исторических клубов рассказывает об уникальном в своем роде немецком самолете Focke-Wulf FW-200 Condor.
Броня крепка: История советского танка 1919-1937
Современный танк является наиболее совершенным образцом сухопутной боевой техники. Это сгусток энергии, воплощение боевой мощи, могущества. Когда танки, развернутые в боевой порядок, устремляются в атаку, они несокрушимы, как божья кара… В одно и то же время танк красив и уродлив, пропорционален и аляповат, совершенен и уязвим. Будучи установленным на постамент, танк являет собой законченное изваяние, способное заворожить… Советские танки всегда были признаком могущества нашей страны. Большинство немецких солдат, воевавших на нашей земле в 1941-1945 гг., называли три веши, больше всего запомнившиеся им, – русские просторы, морозы и танки. Советские танки. Точнее – массы советских танков, которые, подобно несокрушимым монстрам, прокатились по Европе, все сметая на своем пути… Уникальная книга, которую вы держите в руках, откроет читателю историю создания советского танка с момента принятия решения о производстве первого из них в 1919 году и до конца 1937 года. Вы узнаете, какие машины составляли ударную мощь одной шестой части суши в боях с японскими милитаристами и в республиканской Испании. В книге использованы редкие материалы и фотографии из архивов России, гриф секретности с которых только-только снят.
Когда танки, развернутые в боевой порядок, устремляются в атаку, они несокрушимы, как божья кара… В одно и то же время танк красив и уродлив, пропорционален и аляповат, совершенен и уязвим. Будучи установленным на постамент, танк являет собой законченное изваяние, способное заворожить… Советские танки всегда были признаком могущества нашей страны. Большинство немецких солдат, воевавших на нашей земле в 1941-1945 гг., называли три веши, больше всего запомнившиеся им, – русские просторы, морозы и танки. Советские танки. Точнее – массы советских танков, которые, подобно несокрушимым монстрам, прокатились по Европе, все сметая на своем пути… Уникальная книга, которую вы держите в руках, откроет читателю историю создания советского танка с момента принятия решения о производстве первого из них в 1919 году и до конца 1937 года. Вы узнаете, какие машины составляли ударную мощь одной шестой части суши в боях с японскими милитаристами и в республиканской Испании. В книге использованы редкие материалы и фотографии из архивов России, гриф секретности с которых только-только снят.
Последняя крепость Сталина. Военные секреты Северной Кореи
В этой книге охвачен период с момента появления антияпонских вооруженных формирований корейских коммунистов в 1930-х гг. и до наших дней, включая последние столкновения с вооруженными силами Южной Кореи в Желтом море. Охарактеризованы эволюция военной машины Пхеньяна, военная доктрина, ракетно-ядерная и связанная с ней космическая программы, организационно-штатная структура соединений и частей, боевой состав и развертывание (эшелонирование) вооруженных сил КНДР, оперативно-тактические и тактические нормативы ведения общевойскового боя и марша общевойсковых частей, система подготовки личного состава и ополчения, военное образование, идеологическая обработка личного состава и пр.
Крейсера типа “Мацусима”. 1888-1926 гг.
В книге на основе отечественных и иностранных материалов XIX-XX вв. описана история проектирования, строительства и службы японских бронепалубных крейсеров типа «Мацусима».
После постройки они своим внешним видом демонстрировали сочетание двух эпох. Об ушедшем времени многопушечных парусных линкоров напоминали боевые марсы, завал бортов и просторная батарейная палуба, позволявшая легко перемешать прислугу с борта на борт. Длинноствольное крупнокалиберное орудие в барбете, имевшее возможность стрелять не только по курсу, но и на любой борт, предвещало скорое рождение дредноутов со сравнительно малым количеством главной артиллерии.
Об ушедшем времени многопушечных парусных линкоров напоминали боевые марсы, завал бортов и просторная батарейная палуба, позволявшая легко перемешать прислугу с борта на борт. Длинноствольное крупнокалиберное орудие в барбете, имевшее возможность стрелять не только по курсу, но и на любой борт, предвещало скорое рождение дредноутов со сравнительно малым количеством главной артиллерии.
Войдя в строй, они стали самыми большими по водоизмещению и внушительными боевыми единицами японского флота, сочетая в себе качества двух классов кораблей: крейсеров и броненосцев. Сравнительно узкий корпус позволял рассчитывать на высокую скорость, а скорострельная 120-мм артиллерия делала их опасными противниками для любого крейсера или миноносца того времени. Наличие 320-мм орудия с круговой системой подачи боеприпасов и броневого барбета приближало эти крейсера к броненосцам.
Для широкого круга читателей, любящих историю и кораблестроение.
Системы телеуправления
Принцип построения систем ТС
Системы ТС подразделяются по числу уровней контроля:
1-ноуровневая
система с двумя
положениями
Число уровней контроля определяется требованиями к параметрам объекта контроля. Уровень контроля определяется с помощью схем сравнения.
Уровень контроля определяется с помощью схем сравнения.
Структурная схема:
УТС – устройство телесигнализации.
Аналого-дискретный преобразователь
Для построения АЦП используются 3 метода:
— последовательного счёта,
— считывания,
— взвешивания.
По методу считывания:
Z – унитарно-позиционный код Более высокий уровень запрещает
более низкий.
По методу последовательного счёта:
ЦАП – не стандартный, у него должен быть разный шаг (см. диаграмму).
Устройство телесигнализации:
G = 1 при X ≥ Xв
E = 1 при Xн ≤ X < Xв
L = 1 при X < Xн
ИИтс – источник информации ТС.
Протокол синхронизации для нулевого узла (его генератор главный):
МК – манчестерский код.
Tsc = 3TGo
Схема УПС для сигнала МК:
Системы телеизмерения
Виды:
1. Аналоговые — ТИ (с А, Ч, В, Ф признаками)
2. Цифровые — ТИ
Принципы организации такие же как у систем ТС.
Системы ТИ делятся на:
· циклические ТИ (синхронное разделение каналов).
· ВТИ – вызывное телеизмерение (по вызову с центрального пункта). Работает по схеме «запрос-ответ».
Категории систем ТИ:
1. ТИ – абсолютное значение
2. ДТИ – дельта ТИ (измерение по приращению) (ПТИ)
Смысл ДТИ:
Xi представляется в унитарном виде: Xi = Δx∙Nx, где Nx – информация.
Ni = Ni-1 + Δ
Если берём только приращение, то информации становится значительно меньше.
1) ДТИ
XΔ – n = 1 (одноразрядная система ТИ)
+Δ = +Uo
-Δ = -Uo
Восстановленный сигнал (с помощью интегратора)
Это дельта-модуляция (ДМ).
НУ — низкоуровневый.
2) ДТИ
XΔ – n = 2 (двухразрядная система ТИ)
| Код ΔX | Δ | |
| X1 | X0 | |
| +0 +Δ -0 –Δ |
Аппроксимация уже лучше. X1 – это знаковый разряд. X0 – амплитудный разряд. Можно избавиться от колебаний.
Но двух разрядов не хватает для большой скорости.
3) ДТИ
XΔ – n = 3 (трёхразрядная система ТИ)
| Код ΔX | Δ | ||
| X2 | X1 | X0 | |
| +0 +Δ +2Δ П -0 –Δ –2Δ П |
П – переполнение. X2 – это знаковый разряд.
X2 – это знаковый разряд.
Примеры построения систем ТИ
Аналоговые: передача информации в виде напряжения, частоты, времени. Чаще всего используется ШИМ (двухуровневый сигнал).
Система ТИ с ШИМ-преобразователем:
Передатчик
ФМС – формирователь маркера цикла.
Протокол:
Условие: tMC > tx
Системы телеуправления
Рассмотрим формирование сигналов телеуправления:
УФТУ – устройство формирования команд ТУ.
КТУ – команда ТУ.
КТУ формируются тогда, когда:
— объекты начинают подключаться,
— идёт измерение и сигнализация.
Используется адресное телеуправление:
Передающее устройство с адресным управлением:
КЛКТУ – клавиатура команд ТУ.
Мо – пуск.
МК – маркер конца (стоп).
RGc – регистр синхронизации.
RGА – регистр адреса.
RGК – регистр команд.
Система работает в старт-стопном режиме.
Приёмник адресного телеуправления:
1-SYN.
2-Mo (старт).
3-AC (аварийный стоп, обнаружено столкновение).
Схема “= =” пропускает адрес Ai, если он равен записанному в ней Ao.
Поиск по сайту:
Система телеуправления и телесигнализации электрических подстанций
Белорусский государственный университет информатики и радиоэлектроники.
Кафедра систем управления.
Курсовой проект по дисциплине «Телемеханика».
На тему:»Система телеуправления и телесигнализации электрических подстанций».
Минск 2017
В качестве объекта телемеханизации служат электрические подстанции 110/10кВ. В качестве объектов управления являются вакуумные выключатели 10кВ отходящих фидеров.
Графическая часть содержит: структурная схема контролируемого пункта и пункта управления, алгоритм функционирования контролируемого пункта и пункта управления, принципиальную электрическую схему системы и контролируемого пункта.
При выборе контроллера учитывается следующие факторы. Возможность работы с внешним ОЗУ, что позволяет упростить работу с модемом, и микросхемами АЦП. Большое число параллельных портов ввода вывода, что позволит на каждый порт назначить отдельную функцию по управлению периферийными микросхемами и несколько упростить программирование. Большой объем команд. Желательно что бы семейство контроллеров было ранее изучено. Имелась хорошая поддержка в виде документации, и удобного и доступного программного обеспечения для работы с микроконтроллером. Всем заданным параметрам соответствует 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением ATmega64.
Содержание
Введение……………………………………………………………………………………………………5
1 Выбор структуры системы, линий связи и структуры сигналов………………..6
1.1 Выбор структуры системы …………………………………………………………. 6
1.2 Выбор линии вязи……………………………………………………………………….. 7
1.3 Выбор структуры сигналов …………………………………………………………. 7
2 Алгоритм функционирования системы …………………………………………………..10
2.1 Алгоритм функционирования контролируемого пункта ……………… 10
2.2 Алгоритм функционирования пункта управления…………………………10
3 Разработка структурной схемы системы………………………………………………….12
3.1 Структурная схема контролируемого пункта……………………………….. 12
12
3.2 Структурная схема пункта управления…………………………………………12
4 Расчет частотных и временных параметров…………………………………………….14
5 Выбор линий связи…………………………………………………………………………………16
6 Выбор элементной базы системы …………………………………………………………..17
7 Проектирование принципиальной электрической схемы системы……………21
7.1 Принципиальная электрическая схема контролируемого пункта…..21
7.2 Принципиальная электрическая схема пункта управления …………..22
8 Системные расчеты………………………………………………………………………………..25
8.1 Расчет помехоустойчивости………………………………………………………..25
8.2 Спектр сигнала линии cвязи… ………………………………………………….. 26
8.3. Пропускная способность канала. ………………………………………………..27
………………………………………………..27
8.4 Расчет надежности………………………………………………………………………28
9 Разработка программного обеспечения…………………………………………………..30
9.1 Программное обеспечение ПУ………………………………………………………30
9.2 Программное обеспечение КП………………………………………………………32
Заключение………………………………………………………………………………………………37
Литература……………………………………………………………………………………………….38
Состав: структурная схема контролируемого пункта и пункта управления, алгоритм функционирования контролируемого пункта и пункта управления, принципиальную электрическую схему системы и контролируемого пункта. ПЗ
Софт: Microsoft Visio 2016
Сайт: www
Файлы:
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/+KP_electr_A1. vsd
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/+??_electr_A1.vsd
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/?????? ??_?3.vsd
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/?????? ??_?3.vsd
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/????᪠????.docx
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/????ঠ???.doc
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/??? ?? ?3.vsd
+++2_????_6_60_??6_?௮3_??????_???_ᠬ?ᨭ???६??/??? ?? ?3.vsd
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться и принять участие в жизни сайта. Посмотрите, как тут скачивать файлы.
Рейтинг: 100
Софт: Microsoft Visio 2016
Состав: Алгоритм КП, Алгоритм ПУ, Структурная схема КП, Структурная схема ПУ, Принципиальная электрическая схема КП, Принципиальная электрическая схема ПУ, ПЗ
0 2 0
Система телерегулирования параметров температуры в сушильной установке.
Рейтинг: 100
Софт: Microsoft Visio 2016
Состав: Алгоритм КП, Алгоритм ПУ, Структурная схема КП, Структурная схема ПУ, Принципиальная электрическая схема КП, Принципиальная электрическая схема ПУ, ПЗ
0 3 1
Курсовой по телемеханике «Проектирование цифровых систем телеизмерения по алгоритму опроса датчиков — адаптивная коммутация»
Рейтинг: 100
Софт: Microsoft Visio 2010
Состав: Алгоритм КП, Алгоритм ПУ, Структурная схема КП, Структурная схема ПУ, Принципиальная электрическая схема КП, Принципиальная электрическая схема ПУ, ПЗ
0 2 0
Курсовой по телемеханики: «Проектирование цифровых систем телеизмерения»
Рейтинг: 50
Софт: AutoCAD 2015
Состав: Технологические решения: Схема объемов телемеханизации, Схема структурная комплекса технических средств, Схема подключения контроллера присоединения ITDS RTU5, Схема подключения цепей тока КРУ 10 кВ, КРУЭ 110 кВ, ЗРУ 6 кВ, Схема подключения цепей напряжения, Схема подключения цепей сигнализации, Схема подключения цепей управления, Схема подключения цепей питания, Схема подключения информационных цепей, План расположения оборудования и проводок, Шкаф телемеханики ITDS TM-Server-1
0 0 0
Проект телемеханики ПС 220 кВ на ITDS TM-Server
Рейтинг: 100
Софт: Microsoft Visio 2016
Состав: Алгоритм КП, Алгоритм ПУ, Структурная схема КП, Структурная схема ПУ, Принципиальная электрическая схема КП, Принципиальная электрическая схема ПУ, ПЗ
0 3 0
Курсовой по телемеханике «Проектирование цифровых систем телеизмерения по алгоритму опроса датчиков — ТИИ»
Пропорциональная система телеуправления
С. ФЕЛЬДМАН, г. Уральск, Казахская ССР
ФЕЛЬДМАН, г. Уральск, Казахская ССР
В нашем журнале неоднократно рассказывалось о дискретной аппаратуре телеуправления. Она надежна в работе, ее шифратор и дешифратор просты в изготовлении и налаживании, но дискретная система имеет один существенный недостаток — не позволяет реализовывать сложные алгоритмы управления.
Большую гибкость может обеспечить так называемая пропорциональная система. В предлагаемой статье мы знакомим читателей с одним из ее вариантов. Как и обычно, описаны только шифратор и дешифратор.
В шифраторе приметен наиболее распространенный сейчас широтно-импульсный метод кодирования с временным уплотнением.
Средняя длительность информационных импульсов (ти=2 мс) и пауз между ними (тп=0,3 мс) ненамного отличается от той. которая принята в промышленной аппаратуре. Однако для более плавного управления электродвигателями приращение длительности информационного импульса (dт) в крайнем положении ручек управления равно ±1 мс — это больше, чем общепринятое. Для упрощения управления электродвигателями период Т повторения информационных пакетов выбран постоянным и равным 16 мс. В конце каждого информационного пакета формируется пауза, которая необходима для синхронизации распределителя приемника. При перемещении ручек управления длительность синхропаузы (тсп) изменяется в пределах от 3 до 11 мс.
Для упрощения управления электродвигателями период Т повторения информационных пакетов выбран постоянным и равным 16 мс. В конце каждого информационного пакета формируется пауза, которая необходима для синхронизации распределителя приемника. При перемещении ручек управления длительность синхропаузы (тсп) изменяется в пределах от 3 до 11 мс.
Принципиальная схема шифратора показана на рис.1. а сигналы в некоторых его точках — на рис.2. На нижней диаграмме рис.2 показан вид информационного пакета для одного цикла передачи команд в четырехканальной аппаратуре.
рис.1
Основным узлом шифратора является генератор прямоугольных импульсов. Он состоит из истокового повторителя на транзисторе VT3 и триггера Шмитта на элементах DD4.3, DD4.4. В состав генератора входят также резисторы R11 -R14 и дешифратор DD2.
рис.2
При включении питания на выходе элемента DD4. 4 устанавливается сигнал низкого уровня. Конденсатор С2 будет заряжаться через открытый транзистор VT2, а конденсатор С4 — вытекающим входным током элемента DD4.3 через резистор R9. Так как постоянная времени зарядки конденсатора С2 меньше, чем у С4, то к моменту переключения триггера Шмитта в единичное состояние конденсатор С2 будет заряжен до напряжения около 5 В. Время зарядки конденсатора С4 определяет паузу между информационными импульсами.
4 устанавливается сигнал низкого уровня. Конденсатор С2 будет заряжаться через открытый транзистор VT2, а конденсатор С4 — вытекающим входным током элемента DD4.3 через резистор R9. Так как постоянная времени зарядки конденсатора С2 меньше, чем у С4, то к моменту переключения триггера Шмитта в единичное состояние конденсатор С2 будет заряжен до напряжения около 5 В. Время зарядки конденсатора С4 определяет паузу между информационными импульсами.
После переключения элемента DD4.4 в единичное состояние транзистор VT2 закрывается и конденсатор С2 начинает разряжаться черед один из резисторов пульта, выбранного дешифратором DD2. Напряжение с конденсатора С2 через истоковый повторитель VT3 и диод VD1 поступает на триггер Шмитта. При уменьшении этого напряжения до порога переключения, определяемого положением движка подстроечного резистора R7, триггер переключается в нулевое состояние — формируется информационный импульс.
Состояние дешифратора DD2 определено сигналами, поступающими со счетчика на триггерах DD1. 1 и DD1.2. Счетчик переключается в момент спада каждого информационного импульса и поочередно подключает к генератору резисторы R11—R14. Когда на инверсных выходах триггеров DD1.1. DD1.2 будет сигнал 1, то на выходе элемента DD3 появится сигнал низкого уровня, запрещающий работу триггера Шмитта. В этот временной интервал формируется синхропауза.
1 и DD1.2. Счетчик переключается в момент спада каждого информационного импульса и поочередно подключает к генератору резисторы R11—R14. Когда на инверсных выходах триггеров DD1.1. DD1.2 будет сигнал 1, то на выходе элемента DD3 появится сигнал низкого уровня, запрещающий работу триггера Шмитта. В этот временной интервал формируется синхропауза.
Вновь генератор будет запущен импульсом с тактового генератора,собранного на транзисторе VT1 и элементах DD4.1 и DD4.2.
Питают шифратор от стабилизатора напряжения, выполненного на транзисторах VT4, VT5 и стабилитроне VD2. Применение этого стабилизатора позволило повысить стабильность работы всего устройства. Шифратор работоспособен при изменении напряжения от 7 до 15 В. Потребляемый устройством ток равен 10…11 мА.
Вместо указанных на схеме биполярных транзисторов можно применить любые кремниевые маломощные, соответствующей структуры. Транзистор КП303Г можно заменить на КП303Д, КП303Е. Вместо КП303А можно использовать любой транзистор из этой серии с напряжением отсечки не более 1,5 В. Диод VD1 — любой германиевый. Микросхему К134ЛА2 можно заменить микросхемой из серии К106 или К136. Замена остальных микросхем нежелательна, так как это приведет к необходимости пересчета шифратора. Конденсаторы С1 и С2 должны быть бумажными, металлобумажными или пленочными, так как от них зависит стабильность работы шифратора: С3 — К50-3. Терморезистор ММТ-1 (RK1) можно заменить на КМТ-12, ММТ-9. Резисторы R11-R14 — СП-1. Их сопротивление может быть от 68 до 150 кОм, но если углы полного поворота всех ручек управления выбраны равными, то и номиналы всех резисторов должны быть одинаковыми.
Вместо КП303А можно использовать любой транзистор из этой серии с напряжением отсечки не более 1,5 В. Диод VD1 — любой германиевый. Микросхему К134ЛА2 можно заменить микросхемой из серии К106 или К136. Замена остальных микросхем нежелательна, так как это приведет к необходимости пересчета шифратора. Конденсаторы С1 и С2 должны быть бумажными, металлобумажными или пленочными, так как от них зависит стабильность работы шифратора: С3 — К50-3. Терморезистор ММТ-1 (RK1) можно заменить на КМТ-12, ММТ-9. Резисторы R11-R14 — СП-1. Их сопротивление может быть от 68 до 150 кОм, но если углы полного поворота всех ручек управления выбраны равными, то и номиналы всех резисторов должны быть одинаковыми.
Не показанные на схеме входы микросхемы DD3 (выводы 3, 5, 8, 9, рис. 1) надо соединить с любыми из подключенных входов.
Перед налаживанием шифратора необходимо установить начальное сопротивление (Rнач) резисторов пульта. Это сопротивление определяют по формуле:
где R — номинальное сопротивление резистора пульта, а — полный угол поворота движка, dа -угол поворота движка при переводе ручки управления из нейтрального в одно из крайних положений. Для резистора СП-1 (a=255°) сопротивлением 100 кОм при dа, равном 45°, начальное сопротивление должно быть 35 кОм.
Для резистора СП-1 (a=255°) сопротивлением 100 кОм при dа, равном 45°, начальное сопротивление должно быть 35 кОм.
Резистор R3 подбирают таким, чтобы период повторения тактовых импульсов был равен 16 мс. Если при этом длительность отрицательного тактового импульса отличается от 4±0.5 мс. необходимо подборкой резистора R2 установить ее в указанных пределах. После этого к выходу шифратора подключают осциллограф и, вращая подстроечный резистор R7, добиваются возникновения генерации информационных пакетов. Резистор R7 устанавливают в такое положение, когда длительность каждого информационного импульса при нейтральном положении ручек управления равна 2 мс.
Аппаратура радиоуправления должна стабильно работать в широких температурных пределах,поэтому правильный выбор резистора R8 является важным завершающим этапом налаживания шифратора. Сначала вместо резисторов Rl 1-R14 к шифратору подключают постоянные резисторы, равные Rнач. Затем плату шифратора вместе с образцовым термометром обертывают несколькими слоями ткани (для теплоизоляции) так, чтобы были свободны проводники питания и выходные, и на час помещают в морозильную камеру холодильника. После этого плату вынимают и, не разворачивай, подключают к источнику питания и осциллографу. Когда термометр будет показывать 5…10°С, измеряют длительность любого информационного импульса.
После этого плату вынимают и, не разворачивай, подключают к источнику питания и осциллографу. Когда термометр будет показывать 5…10°С, измеряют длительность любого информационного импульса.
Потом не разворачивая платы, ее медленно нагревают (например, завернув в электрогрелку). При температуре 45…50″С вновь измеряют длительность того же импульса. Если разница в длительности у холодного и нагретого шифратора превышает 0,1 мс, то сопротивление резистора R8 необходимо увеличить приблизительно на 100 Ом на каждые 0,1 мс разности. Если импульс нагретой платы окажется короче, то сопротивление резистора необходимо уменьшать в таком же соотношении.
В приемнике сигнал с выхода детектора поступает на вход распределителя, который разделяет информационный пакет на четыре отдельных канальных импульса, которые поступают на свои дешифраторы.
Принципиальная схема распределителя показана на рис. 3. Усиленный элементом DD1.1 и приведенный к уровням ТТЛ элементом DD1. 2, информационный пакет поступает на селектор, выделяющий синхропаузы (DD1.4. VD1, С1) и через инвертор DD1.3 на вход счетчика (DD2.1, 1)02.2). и далее на дешифратор-демультиплексор DD3, DD4. Так как информационные импульсы, принятые приемником, имеют уровень 0, то на выходе элемента DD1.4 будет уровень 1. Этот же уровень сохранится и в паузе между импульсами потому, что продолжительность паузы недостаточна для зарядки конденсатора С1 до высокого уровня и изменения состояния элемента DD1.4. Счетчик DD2.1, DD2.2 изменяет свое состояние по спаду каждого информационного импульса, разрешая им поочередно проходить на каждый выход дешифратора-демультиплексора.
2, информационный пакет поступает на селектор, выделяющий синхропаузы (DD1.4. VD1, С1) и через инвертор DD1.3 на вход счетчика (DD2.1, 1)02.2). и далее на дешифратор-демультиплексор DD3, DD4. Так как информационные импульсы, принятые приемником, имеют уровень 0, то на выходе элемента DD1.4 будет уровень 1. Этот же уровень сохранится и в паузе между импульсами потому, что продолжительность паузы недостаточна для зарядки конденсатора С1 до высокого уровня и изменения состояния элемента DD1.4. Счетчик DD2.1, DD2.2 изменяет свое состояние по спаду каждого информационного импульса, разрешая им поочередно проходить на каждый выход дешифратора-демультиплексора.
рис. 3
Через 1 мс после начала синхропаузы конденсатор С1 заряжается до напряжения переключения элемента DD1.4. На его выходе устанавливается низкий уровень, и триггеры DD2.1, DD2.2 переключаются в состояние 0, что соответствует выбору первого канала. При поступлении следующего информационного пакета элемент DD1. 4 переключается в единичное состояние, и процесс распределения импульсов повторится.
Распределитель налаживания нс требует и начинает работать сразу. Только при подключении его к приемнику может понадобиться подборка резистора R1. Его подбирают, добиваясь устойчивой работы распределителя при наибольшем изменении амплитуды сигналов с приемника.
Отрицательные информационные импульсы с выходов распределителя поступают на четыре идентичных канальных дешифратора. На рис. 4 показана схема одного из них, а сигналы в его характерных точках — на рис. 5.
Puc.4
Отрицательный широтно-модулированный информационный импульс, пройдя через повторитель DD1.1, DD1.2 и дифференцирующую цепь C1R2, запускает одновибратор (VT1, DD1.3, VD1),
рис. 5
который формирует отрицательный образцовый импульс, длительность которого определяется по формуле:
где Uупр — напряжение на Входе упр. дешифратора.
Отрицательный информационный и положительный образцовый импульсы поступают на узел совпадения DD2.1, DD2.2. На такой же узел, только на элементах DD3.1, DD3.2, поступают положительный информационный и отрицательный образцовый импульсы. Если информационный импульс длиннее образцового. то разностный положительный импульс появится на выходе момента DD3.2, а если наоборот — на выходе элемента DD2.2 (см. рис. 5, сигнал на выходе элементов DD3.2 и DD2.2).
Разностные импульсы узлов совпадения приходят на два идентичных устройства удлинения импульсов. Первое состоит из интегратора (С3, R5, VD4, R4), эмиттерного повторителя (VT2) и триггера Шмитта (DD2.3. DD2.4), а второе — из интегратора (С4, R11, VD6, R10), эмиттерного повторителя (VT3) и триггера Шмитта (DD3.3, DD3.4). Так как постоянная времени зарядки конденсаторов СЗ. С4 гораздо меньше времени разрядки, то на выходе триггеров Шмитта будут формироваться положительные импульсы, длительность которых пропорциональна длительности разностных импульсов. Длительность положительных импульсов будет в 16… 40 раз больше, чем длительность разностных импульсов.
Стабилизатор напряжения (VT1, VT2, VB2, С2) предназначен для питания распределителя и всех дешифраторов (см. рис. 3). Распределитель и каждый из дешифраторов потребляют ток не более 6 мА.
Транзисторы дешифратора и транзистор VT1 стабилизатора напряжения могут быть любыми кремниевыми. Транзистор КП303Г в стабилизаторе можно заменить на КП303Д. КП303Е, а микросхемы К134ЛБ2 в распределителе — на К106ЛБ2.
Для налаживания дешифратора потребуется генератор, формирующий импульсы длительностью 1…3 мс и периодом повторения 16 мс. Если такого генератора нет, то можно использовать шифратор, подключив к нему распределитель. Сигнал с шифратора подают на вход элемента DD1.2 распределителя, а вывод 1 элемента DD1.1 временно отключают.
Одновибратор дешифратора настраивают при напряжении на Входе упр. 2,2 В. На сигнальный вход подают отрицательные импульсы, а резистор R3 подбирают так, чтобы длительность отрицательного импульса на выходе элемента DD1.3 была равна 2 мс.
Если дешифратор предназначен для включения электродвигателя на определенное время, то вместо резисторов R5, R11 устанавливают перемычки. На дешифратор подают импульсы длительностью 2,3 мс (на выходе элемента DD3.2 появится разностный импульс длительностью 0,3 мс) и подбирают резистор R10 так, чтобы длительность импульсов на выходе элемента DD3.4 была 12…15 мс. Затем уменьшают длительность входных импульсов до 1,7 мс (разностный импульс 0,3 нс) и подбирают резистор R4 так, чтобы на выходе элемента DD2.4 были импульсы длительностью 12…15 мс.
Если дешифратор используют для управления частотой вращения электродвигателя. то на Вход упр. также необходимо подать напряжение 2,2 В, а длительность выходных импульсов должна быть 2,8 мс. Резистор RI 1 подбирают так, чтобы конденсатор С4 заряжался до напряжения 2,5 В. Резистор R10 подбирают таким, чтобы длительность импульсов на выходе элемента DD3.4 была около 15 мс. Резисторы R4, R5 подбирают так же, как R10, RI 1, но на вход дешифратора необходимо подать импульсы длительностью 1,2 мс.
Распределитель может работать с приемником любого типа. Информационные импульсы на выходе приемника должны быть отрицательными с амплитудой более 1 В. Выход приемника должен быть закрытым или иметь выходной сигнал в уровнях ТТЛ.
РАДИО 7, 1987 г., с.42-44
|
Архив Приложение к журналу Ключевые слова Пароль ВХОД регистрация Другие журналы
|
Система светового телеуправления для мобильных исполнителей #8 август 2007 Тючков Андрей Анатольевич
лицей, г. Научный руководитель: Карпов Олег Викторович, учитель информатики лицея г. Орехово-Зуево
Введение Во многих отраслях промышленности применяются роботы, которые заменяют человека при операциях монотонного труда и во вредных условиях. В отдельных случаях системы управления такими объектами должны быть беспроводными, а система управления должна включать возможность алгоритмизирования операций, для выполнения определенного числа повторяющихся операций. Одним из перспективных направлений в сфере телеуправления является светоуправление. Целью настоящего творческого проекта является разработка простой, но достаточно надежной системы светоуправления.
1. Конструкция исполнителя
Прежде чем разрабатывать систему телеуправления, было решено сделать объект, которым необходимо управлять, то есть исполнителя.
Рис. 1. Внешний вид робота-исполнителя (на фотографии сняты губки захвата и панель аккумуляторов)
Передвижная платформа имеет правое и левое ведущие колеса, если включены два двигателя, то осуществляется движение вперед или назад, если включен какой-либо один двигатель, то осуществляется поворот (танковый принцип движения). Подъемник представляет собой механизм, который поднимает и опускает захват (рис. 2)
а б Рис. 2. Подъемник в верхнем (б) и нижнем (а) положениях
Захват устанавливается на подъемнике.
Рис. 3. Конструкция захвата (со снятыми губками)
2. Система телеуправления Структурная схема разработанной системы телеуправления представляет собой следующее (рис. 4):
Рис. 4.
Компьютер. Его задача – генерация по команде оператора определенного количества импульсов определенной длинны.
Передатчик. Задача этого устройства – передать импульсы, сгенерированные компьютером. Отличительной чертой ДУ приемника TSOP 1736 (установлен на исполнителе), является то, что в его схему помимо фотоэлемента и усилителя входит фильтр на 36 кГц, поэтому передатчик должен не только передавать импульсы, но и производить амплитудную модуляцию, причем глубина модуляции 100%.
Рис. 5. Приемник представлен на рис. 6. Схема предназначена для приема импульсов, переданных передатчиком.
Рис. 6.
Дешифратор представлен на рис. 7. Данная схема предназначена для обработки полученного кода, и включения, согласно ему, необходимых устройств. Участок схемы а-б предназначен для устранения помех. Опытным путем установлено, что длительность импульса помехи значительно короче длительности импульса команды.
Поэтому помехи легко убрать при помощи R-C цепочки и триггера Шмидта. R-C цепочка не пропускает короткие импульсы, а триггер Шмидта играет роль порогового элемента, формирующего четкий импульс. С выхода триггера Шмидта через инвертор импульс поступает на счетный вход счетчика. Участок схемы б-в имеет схему аналогичную участку а-б. Данная часть схемы пропускает импульсы, длительность которых в несколько раз больше длительности импульсов команд. Эти импульсы поступают на сброс счетчика. Микросхема К155ИЕ5, на которую поступают импульсы команд и сброса – четырех разрядный двоичный счетчик. Микросхема имеет четыре выхода, каждый из которого через усилитель тока подключен к реле. Контакты реле соединены таким образом, что каждому состоянию счетчика соответствует определенное действие.
Рис. 7.
Исполнительные устройства. Представляют собой механизмы робота, двигатели которого управляются выходами дешифратора. Итак, получаем следующую принципиальную схему устройства (рис. 8):
Рис.
3. Програмное обеспечение Программное обеспечение для разработанного устройства не отличается особой сложностью. Задача компьютера в данной системе телеуправления генерация в нужный момент определенного количества импульсов заданной длительности. Количество импульсов определяется соответствующей командой. Все импульсы для передачи команд имеют одинаковую длительность, за исключением импульса команды «Сброс». Длительность этого импульса в несколько раз больше длительности импульса для передачи команд. Программа включает в себя два режима работы: первый режим: команда дается исполнителю, и исполнитель моментально выполняет ее, второй режим: составляется определенный алгоритм, после нажатия клавиши «Выполнить» исполнитель выполняет заданную последовательность действий.
Выводы
В результате реализации данного проекта определена принципиальная работоспособность разработанной системы телеуправления мобильным исполнителем.
данной системы телеуправления демонстрируется ее применением на реальном исполнителе. Разработанная система телеуправления может применяться в условиях вредной атмосферы химических производств, в вакууме, и в условиях практически любой среды, которая допускает распространение инфракрасного излучения, при установке соответствующей защиты на электронные компоненты. Одним из преимуществ данной системы управления является использование инфракрасного диапазона для передачи информации, что допускает использование данной системы телеуправления в условиях электромагнитных помех. А при использовании в промышленности данная конструкция не будет нуждаться в лицензировании на применение соответствующей радиочастоты.
Список литературы 1. Лавриненко В.Ю. Справочник по полупроводниковым приборам. 2. Соломенчук В., Соломенчук П. Железо ПК 2005.
3. Поделиться: |
|
||||||||
|
||||||||||
Надежная технология телеуправления | ВАГО
Мировые запасы ископаемого топлива иссякают, а глобальное потепление идет полным ходом.
Что такое технология телеуправления?
«Телеуправление» описывает дистанционное управление и мониторинг объектов за пределами площадки. С помощью процедур преобразования сигналов технологические данные могут передаваться и приниматься из одного или нескольких мест.
В 1950-х технология телеуправления все еще была «человеческой». Команды переключения, например, в энергетике, передавались по аналоговому телефону, а персонал на подстанции выполнял их вручную. Затем на «обратную связь» ответили звонком. В настоящее время данные традиционно получают от подстанции (например, ПЛК), которая преобразует их и передает через различные средства передачи (GSM, радио или проводные) на центральную станцию или в систему управления.
Различные протоколы данных передают иногда очень важные данные процесса. Например, протоколы IEC 60870-5-101, IEC 60870-5-103, IEC 60870-5-104, IEC 61850 и DNP 3.0 зарекомендовали себя в качестве стандартов, в частности, для технологии питания.
Высокие системные требования. Помимо прочной конструкции, основное внимание уделяется вероятности отказа и специальным мерам безопасности и защиты данных.
Пример применения
-
Управление сетями снабжения (электричество, газ, вода, централизованное теплоснабжение) как часть системы управления энергосистемой
-
Контроль и мониторинг потребления энергии (счетчики газа, электроэнергии и воды)
-
Управление дорожными системами (светофоры, уличное освещение)
Технология телеуправления для электросетей
Инфраструктуры электро-, газо-, водо- и теплоснабжения, в частности, имеют широко разветвленные зоны обслуживания и удаленные станции. Поскольку они делают возможной современную жизнь, важна бесперебойная работа. Неисправности должны быть обнаружены и устранены немедленно, поскольку они могут серьезно повлиять на человеческие жизни в одно мгновение. Таким образом, качество продукции всегда должно быть гарантировано, чтобы избежать ущерба для здоровья или экономического ущерба.
Преимущества технологии телеуправления WAGO
-
Удаленный мониторинг станций
-
Процессы, измерения и контроль
-
Быстрая реакция в случае неисправности
-
Удаленный доступ
-
Наличие различных средств передачи
Почему технология телеуправления WAGO?
Благодаря первоклассным продуктам, решениям и первоклассному обслуживанию для технологий телеуправления всех размеров и диапазонов (например, общественная инфраструктура, возобновляемые источники энергии и обрабатывающая промышленность) для безопасного и экономичного доступа к удаленным системам, WAGO является ключом к успеху телеуправления технологии и интеллектуальные сетевые приложения.
Технология телеуправления WAGO уже более десяти лет является неотъемлемой частью ассортимента продукции WAGO. Система имеет все основные мировые сертификаты и используется в самых суровых условиях, таких как электростанции всех уровней напряжения, горнодобывающая промышленность, морские установки и трубопроводные системы. Гибкость уровня сигнала и доступность протокола шины уникальны.
Разумеется, технология телеуправления WAGO поддерживает протоколы IEC 60870, 61850, DNP 3 и Modbus®. Они просты в настройке и эксплуатации для программиста, не имеющего отношения к ПЛК.
Особое внимание уделяется коммунальному хозяйству. WAGO решает эту проблему и предлагает контроллеры, которые можно усилить в соответствии со стандартом BDEW White Paper. В частности, энергетический сектор живет со страхом взлома, но станции телеуправления, оборудованные WAGO, имеют лучшую в отрасли защиту.
Используйте наши гибкие решения для дистанционного управления, чтобы контролировать сети распределения электроэнергии и гарантировать подачу энергии. Другими областями применения являются управление, регулировка и удаленный мониторинг газовых, водяных и отопительных систем, поскольку встроенный ПЛК непосредственно выполняет задачи автоматизации.
Примеры применения
-
Автоматизация точек отключения
-
Функция преобразования протокола
-
Подключение индикаторов короткого замыкания
-
Дистанционное управление генератором, потребителем и системой хранения
-
Автоматизация газоперекачивающих станций
-
Адаптация контроллеров тепловых пунктов к системе управления
Кибербезопасность
Кибербезопасность: отказ в доступе хакерам
Если у производителей энергии не будет безопасного подключения к Интернету, это может иметь серьезные последствия. Киберпреступники могут использовать системные контроллеры, чтобы взломать центры управления и отключить их, поставив под угрозу энергоснабжение и даже угрожая полным отключением электроэнергии в худшем случае. Хорошая новость: операторы теперь знают об опасностях, и кибербезопасность становится все более важной. Контроллеры WAGO будут играть решающую роль в политике и процедурах безопасности вашей компании. Операционные системы для ПК должны получать еженедельные обновления безопасности, поскольку в противном случае они не обеспечивают достаточную кибербезопасность; однако усиленная прошивка контроллера WAGO соответствует соответствующим требованиям безопасности. Преимущества решения WAGO:
- Оба контроллера PFC100 и PFC200 характеризуются кросс-платформенным Linux® реального времени.
- Контроллеры PFC используют операционную систему с открытым исходным кодом, которую можно масштабировать, обновлять и поддерживать такие инструменты, как Rsync.
- Linux® Foundation поддерживает основные протоколы безопасности и постоянно совершенствуется.

- Поддержка среды выполнения CODESYS PLC
- Различные интерфейсы и полевые шины: CANopen, PROFIBUS DP, DeviceNet®, IEC 60870, IEC 61850, DNP 3 и Modbus TCP
- Удовлетворяет самым высоким требованиям безопасности серии ISO-27000
- Встроенная функция VPN: возможен туннель VPN напрямую через IPsec или OpenVPN
- Кодирование данных в контроллере напрямую через шифрование SSL/TLS 1.2
- Параллельный доступ к данным: передача данных в облако через MQTT или OPC UA, а также в беспроводную сеть
- WAGO соответствует всем соответствующим рекомендациям в области кибербезопасности и даже большому количеству требований из официального документа правительства Германии BDEW для приложений в области энергетики и водоснабжения. Требования BDEW являются частью «критической инфраструктуры» (KRITIS).
- PFC200 можно использовать как масштабируемый узел
Сертификаты и разрешения
Действительные разрешения и сертификаты являются необходимым условием для безопасной и надежной работы технологий телеуправления во всем мире, особенно когда речь идет о функционировании распределительных сетей.
Поэтому у нас есть проверка для трех наиболее важных протоколов телеуправления IEC 61850, IEC 60870 и DNP 3, и мы регулярно обновляем ее. Таким образом, вы можете без каких-либо забот использовать технологию телеуправления WAGO. Сертифицированные протоколы телеуправления обеспечивают дополнительный уровень безопасности при интеграции или подключении сторонних компонентов к системе телеуправления WAGO.
- Сертификат DNP3
- Сертификат IEC 61850
- Сертификат IEC 60870
- Сертификаты WAGO I/O System 750
SCADA и система дистанционного управления повышают качество жизни жителей Шри-Ланки
Качество воды является критической проблемой в Шри-Ланке. Промышленное загрязнение и загрязнение от сброса отходов являются главными претендентами в длинном списке факторов, влияющих на плохое качество воды в Шри-Ланке. Это настолько вышло из-под контроля, что сообщалось, что местные рестораны использовали воду из незаконных скважин, а не воду из городских источников. Сообщалось о последствиях использования плохой воды в виде кожных заболеваний, гепатита и других серьезных проблем со здоровьем.
В связи с риском для здоровья были предприняты большие усилия по скорейшему решению проблемы с водоснабжением. Одна система, которая была развернута, уже улучшает ситуацию с качеством воды. Это SCADA (диспетчерское управление и сбор данных), управляющая сотнями мобильных станций обратного осмоса (RO).
Станции обратного осмоса восстанавливают качество воды
Обратный осмос используется для удаления большинства загрязняющих веществ из воды путем ее проталкивания под давлением через полупроницаемую мембрану. Как правило, в подземных водах содержится широкий спектр растворенных минералов. Растворенные в природе минералы, такие как соль, а также растворенные промышленные загрязнители удаляются в процессе обратного осмоса, создавая деминерализованную воду, безопасную для употребления. Станции обратного осмоса размещены на различных колодцах для снабжения местных жителей чистой питьевой водой.
Тестирование процесса обратного осмоса на качество воды обычно проводится с помощью электропроводности. Электропроводность определяется количеством ионизированных веществ, таких как кислоты, основания и соли, растворенных в воде. Деминерализованная вода является плохим проводником электричества.
Система SCADA для этого проекта мониторинга воды настроена, и проект идет полным ходом. SCADA отслеживает состояние станций обратного осмоса, чтобы оценить, правильно ли они работают. Он проверяет качество воды и сообщает о таких показателях, как значения PH и проводимости, а также контролирует состояние насосов станций. Каждая станция обратного осмоса имеет около 10 тегов, которые отслеживаются для этой цели.
На буровых площадках установлено около 80 станций обратного осмоса. Станции обратного осмоса используют ПЛК SIMATIC S7-1200 (программируемые логические контроллеры). Станции взаимодействуют с сотовыми модемами, которые подключены к системе SCADA PcVue через сервер Siemens OPC TeleControl.
В PcVue SCADA настроены сигналы тревоги для оповещения о неблагоприятных условиях на станции. Эти аварийные сигналы возникают при любых изменениях состояния станции. Тревоги также управляют анимацией в графическом пользовательском интерфейсе; производить изменения цвета, изменять текстовые строки и управлять внешним видом графических символов, что упрощает обслуживание графического дисплея.
Оператор, имеющий учетные данные, дающие ему соответствующие права пользователя, может подтверждать сигналы тревоги. Права пользователя обеспечивают уровень безопасности действий в приложении PcVue SCADA. В этом распределенном приложении сигналы тревоги или изменения любых точек состояния принимаются сервером SCADA на станции управления. Это гарантирует, что станция управления знает о подтвержденных сигналах тревоги и позволяет им отслеживать состояние различных скважин.
Использование мобильной связи
Приложение PcVue SCADA использует встроенный элемент управления GEO Map (графический компонент), сконфигурированный для отображения принятия решений ГИС (Географическая информационная система) в графике SCADA. Элемент управления GEO Map использует стандартный поставщик карт, в данном случае Google Maps, на который накладываются маркеры, созданные редактором PcVue, способным отображать информацию в реальном времени, представляющую станции RO. ГИС SCADA позволяет оператору легко находить и отслеживать станции обратного осмоса.
Для получения статуса каждой станции PcVue соединяется с TeleControl. TeleControl использует General Packet Radio Service (GPRS) и долгосрочную эволюцию (LTE) для телекоммуникаций. GPRS — это пакетно-ориентированная служба мобильной передачи данных в глобальной системе сотовой связи 2G и 3G для мобильной связи (GSM). LTE, технология 4G, стала общепринятым стандартом беспроводной передачи высокоскоростных данных для мобильных телефонов и терминалов данных. TeleControl может передавать данные со скоростью до 60 Кбит/с, используя энергоэффективный метод отправки и получения данных. Это хороший выбор для удаленных приложений с проверенной надежностью и эффективностью батареи, особенно при мониторинге и контроле удаленных станций обратного осмоса.
Таль Нив, генеральный директор Shaniv Control and Automation Ltd., является сертифицированным партнером PcVue, интегратором и инжиниринговой компанией для проектов промышленного контроля и автоматизации, а также тем, кто настроил систему. Он разработал мнемосхемы (графические дисплеи пользовательского интерфейса) в PcVue и настроил их с помощью значков, чтобы операторы могли легче контролировать удаленные станции обратного осмоса. Например, есть значок, который меняет цвет, чтобы показать оператору, правильно ли работает насос.
Программное обеспечение SCADA сконфигурировано таким образом, что оператор может изменять идентификацию и физическое расположение станций обратного осмоса без помощи специалиста PcVue SCADA. Оператор может поддерживать отображение карты SCADA, редактируя идентификацию или широту и долготу для любого маркера станции RO. Это помогает быстро определить, когда станция обратного осмоса была перемещена и где они все находятся в любое время. Дисплеи также предоставляют оператору станции управления всесторонний обзор рабочего состояния всей системы и визуализацию состояния и местоположения всех станций обратного осмоса.
Это обеспечивает управляемость и позволяет станции управления эффективно отслеживать, где установлены станции обратного осмоса, и точно отслеживать качество воды в любой данной скважине. PcVue SCADA в сочетании с Siemens S7 и TeleControl работает в гармонии и зарекомендовала себя как очень эффективное, доступное и гибкое решение.
объектов BIM — Скачать бесплатно! KESSEL-Телеметрическая система 28792 TeleControl
Регион доступности
| Albania | Maldives | Argentina | Papua New Guinea | Algeria | Anguilla | |||||||
| Monaco | Mongolia | Bolivia | Острова Питкэрн | Намибия | Антигуа и Барбуда | |||||||
| Черногория | Myanmar (Burma) | Brazil | Samoa | Niger | Aruba | |||||||
| Netherlands | Nepal | Chile | Solomon Islands | Нигерия | Барбадос | |||||||
| Норвегия | Северная Корея | 0201 Timor-Leste | Republic of the Congo | Belize | ||||||||
| Poland | Pakistan | Ecuador | Tokelau | Reunion | Бермуды | |||||||
| Португалия | Филиппины | Фолклендские (Мальвинские) острова | Tonga | Rwanda | British Virgin Islands | |||||||
| Romania | Singapore | French Guiana | Tuvalu | Saint Helena | Канада | |||||||
| Россия | Южная Корея | Гайана | Малые отдаленные острова США | São Tomé and Príncipe | Caribbean Netherlands | |||||||
| San Marino | Sri Lanka | Paraguay | Wallis and Futuna | Senegal | Cayman Острова | |||||||
| Сербия | Тайвань | Перу | Вануату | Seychelles | Collectivity of Saint Martin | |||||||
| Slovakia | Tajikistan | Suriname | Palau | Sierra Leone | United States | |||||||
| Словения | Таиланд | Уругвай | Северные Марианские острова | Somalia | U. | |||||||
| Spain | Turkmenistan | Venezuela | Niue | South Africa | Costa Rica | |||||||
| Шпицберген и Ян-Майен | Узбекистан | Американское Самоа | Южный Судан | Cuba | ||||||||
| Sweden | Vietnam | Australia | Sudan | Curaçao | ||||||||
| Switzerland | Malaysia | Cook Острова | Свазиленд | Доминика | ||||||||
| Украина | Макао | Federated States of Micronesia | Tanzania | Dominican Republic | ||||||||
| United Kingdom | Kyrgyzstan | Fiji | The Gambia | El Сальвадор | ||||||||
| Ватикан | Армения | Французская Полинезия | Togo | Greenland | ||||||||
| Åland Islands | Azerbaijan | Guam | Tunisia | Grenada | ||||||||
| Moldova | Bangladesh | Кирибати | Уганда | Гваделупа | ||||||||
| Malta | Bhutan | Marshall Islands | Western Sahara | Guatemala | ||||||||
| Luxembourg | British Indian Ocean Territory | Nauru | Замбия | Гаити | ||||||||
| Андорра | Бруней | New Caledonia | Zimbabwe | Honduras | ||||||||
| Austria | Cambodia | New Zealand | Mozambique | Jamaica | ||||||||
| Belarus | Китай | Остров Норфолк | Марокко | Мартиника | ||||||||
| Belgium | Christmas Island | Mayotte | Montserrat | |||||||||
| Bosnia and Herzegovina | Cocos (Keeling) Islands | Mauritius | Никарагуа | |||||||||
| Болгария | Грузия | Ангола | Panama | |||||||||
| Croatia | Hong Kong | Benin | Puerto Rico | |||||||||
| Cyprus | India | Botswana | Сент-Китс и Невис | |||||||||
| Чехия | Индонезия | Burkina Faso | Saint Lucia | |||||||||
| Denmark | Japan | Burundi | Saint Pierre and Miquelon | |||||||||
| Estonia | Kazakhstan | Камерун | Сент-Винсент и Гренадины | |||||||||
| Фарерские острова | Laos | Cape Verde | Saint-Barthélemy | |||||||||
| Finland | Iran | Central African Republic | Sint Maarten | |||||||||
| Франция | Ирак | Чад | Багамы | 04 | 40200 Germany | Israel | Comoros | Trinidad and Tobago | ||||
| Gibraltar | Jordan | Côte d’Ivoire | Turks и острова Кайкос | |||||||||
| Греция | Кувейт | Демократическая Республика Конго | Mexico | |||||||||
| Guernsey | Lebanon | Djibouti | ||||||||||
| Hungary | Oman | Equatorial Guinea | ||||||||||
| Исландия | Палестина | Эфиопия | ||||||||||
| Ireland | Qatar | Gabon | ||||||||||
| Isle of Man | Saudi Arabia | Ghana | ||||||||||
| Italy | Syria | Гвинея | ||||||||||
| Джерси | Турция | 909-B0003 | ||||||||||
| Latvia | United Arab Emirates | Kenya | ||||||||||
| Liechtenstein | Yemen | Lesotho | ||||||||||
| Lithuania | Бахрейн | Либерия | ||||||||||
| Македония (БЮРМ) | Afghanistan | Libya | ||||||||||
| Madagascar | ||||||||||||
| Malawi | ||||||||||||
| Mali | ||||||||||||
| Мавритания | ||||||||||||
| 6 Эритрея0003 | ||||||||||||
| Egypt |
COTTO Sanitaryware & Fittings คอตโต้ สุขภัณฑ์และก๊อกน้ำ COTTO Floor drain square body CT697Z3PW(HM)
DELABIE 683001DE Floor trap
COTTO Sanitaryware & Фитинги คอตโต้ สุขภัณฑ์ และ ก๊อก น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ น้ำ gala gla-rain rain sq Integrated Drainage Kit 105
Oatey Oatey 130 Series Series Deash Deasu0003
HAFELE เฮเฟเล่ HAFELE Сливной трап 589. 04.907
Безопасное дистанционное управление тяжелым оборудованием и машинами
Повышение безопасности и производительности автономных систем и тяжелого оборудования благодаря надежному дистанционному управлению. Выберите между Safe Remote Control для двухточечного управления через радио ISM или Safe Remote Control Pro для управления несколькими машинами через радио ISM.
- Встроенный аварийный останов
- Дизайн в игровом стиле
- Работает всю смену
Управляйте парком машин с одного пульта дистанционного управления.
Интуитивное управление
Позволяет оператору дистанционно управлять машиной по требованию, обычно для транспортировки, обслуживания или устранения неполадок.
Упрощение работы пользователя
Удобная, легкая и интуитивно понятная конструкция облегчает процесс обучения и повышает производительность.
Повышение производительности
Ускорьте ежедневную производительность и наслаждайтесь удобными элементами управления, включая два 2-осевых джойстика и два 1-осевых джойстика.
Предотвращение несчастных случаев
Управляйте опасным оборудованием на расстоянии, чтобы снизить риск несчастных случаев и улучшить видимость всех движущихся частей с лучшей точки зрения. Встроенная аварийная остановка добавляет дополнительный уровень защиты.
Соблюдение отраслевых стандартов
Соблюдение отраслевых стандартов с помощью нашей запатентованной беспроводной системы и предотвращение несчастных случаев.
Снижение усталости рабочих
Обеспечьте свои команды мощным удаленным доступом, чтобы снизить усталость и травмы, связанные с работой с тяжелым оборудованием.
Блог по теме -> Способы сделать вашу следующую раскопку более безопасной и эффективной
Safe Remote Control
Safe Remote Control — это простой в использовании контроллер для различных машинных приложений. Управляйте внедорожниками на расстоянии, управляйте автономным роботом или мгновенно останавливайте машину с помощью встроенной аварийной остановки. Безопасный пульт дистанционного управления, достаточно прочный для любой среды, где требуется управление «точка-точка», позволяет вам отвечать за безопасность и производительность машины. Safe Remote Control подключается к приемнику FORT Vehicle Safety Controller.
Технические характеристики безопасного дистанционного управления
Частота беспроводной связи
- 900 МГц FHSS
- 2,4 ГГц FHSS
Дальность прямой видимости
- До 2 км при 900 МГц
До 500 м при 2,4 ГГц - Может варьироваться в зависимости от размещения антенны, препятствий и окружающей среды
Входы
- (2) 2-осевые джойстики
- (2) 1-осевые стержни для пальцев
- 8 кнопок
- Встроенная кнопка аварийной остановки
Функции безопасности
- Двойные процессоры безопасности
- Двухканальная аварийная остановка
- Обнаружение падения и бездействия
- Виброотклик
- Разработано в соответствии со стандартом ISO 13849
Корпус
- IP65 в соответствии с IEC-60529
- Прочные резиновые рукоятки
- ЖК-дисплей с возможностью чтения при солнечном свете для информации об устройстве
Рабочая температура
- от -20°C до +60°C
Срок службы батареи
- 12 часов
Приемник
- Пары с контроллером безопасности FORT
Скачать техническое описание
Safe Remote Control Pro
Временное ручное управление автономным транспортным средством или активация глобальной аварийной остановки из удаленного места. Благодаря возможности подключения и отключения различных машин с помощью общего пульта дистанционного управления Safe Remote Control Pro может повысить безопасность и производительность любого оператора машины. Safe Remote Control Pro подключается к приемнику FORT Endpoint Controller (EPC).
Технические характеристики Safe Remote Control Pro
Беспроводной интерфейс
- BLE
- ISM 902–928 МГц (нет данных)
- ISM 868 МГц (ЕС)
Входы
- 6 пропорциональных аналоговых регуляторов
- 8 пользовательских кнопок
- Кнопка аварийного останова с подсветкой
Функции безопасности
- Двойные процессоры безопасности
- Двухканальная аварийная остановка
- Обнаружение падения и бездействия
- Виброотклик
- Разработано в соответствии со стандартами безопасности ISO 13849/IEC 61508
Корпус
- IP65 в соответствии с IEC-60529
- Прочные резиновые рукоятки
- ЖК-дисплей с возможностью чтения при солнечном свете для информации об устройстве
Рабочая температура
- от -20°C до +60°C
Срок службы батареи
- 12 часов
Нормативная
- Маркировка CE для ЕС*
- МЭК 61508 Рейтинг SIL2*
*В ожидании
Приемник
- Пары с контроллером FORT Endpoint
Скачать техническое описание
Приложения для дистанционного управления
С помощью Safe Remote Control и Safe Remote Control Pro пользователи могут управлять внедорожниками на расстоянии, временно управлять автономным роботом или управлять умной машиной.
Безопасный пульт дистанционного управления в действии
Greenzie ставит безопасность на первое место, используя систему безопасного дистанционного управления FORT для своих автономных газонокосилок.
Смотреть видео
Защитите свои инвестиции
Пакеты защиты Guardian обеспечивают дополнительную защиту для продуктов серии FORT Foundation. Эти расширенные планы обслуживания и поддержки предлагают клиентам постоянные обновления микропрограммного обеспечения и программного обеспечения, а также оперативную поддержку по решению проблем после нашей стандартной годовой гарантии.
Учить большеНовинки от FORT
Запустите интеллектуальную автоматику безопасности машины.
Для получения более подробной информации о беспроводном пульте дистанционного управления заполните форму ниже.
Tureng — система дистанционного управления
Tureng — система дистанционного управления — Испанско-английский словарь- Испанский английский
- О нас
- Инструменты
- Ресурсы
- Контакт
- Вход/Регистрация
- Выключить свет
- испанский
- Турецкий — английский
- Французский — английский
- испанский — английский
- немецкий — английский
История
Играть ENESENus
Играть ENESENuk
Играть ENESENau
Значения
«remote control system» в испанско-английский Словарь : 3 результатовЗначения
«система дистанционного управления» с другими терминами в англо-испанском словаре : 6 результатов| Категория | Английский | Испанский | ||
|---|---|---|---|---|
| Машиностроение | ||||
| 1 | Машиностроение | система дистанционного управления приемником | система телеуправления рецепторами | |
| 2 | Машиностроение | система дистанционного управления приемником | система телемандо де рецепторов | |
| Информатика | ||||
| 3 | Информатика | сетевая система дистанционного управления | телемандо де редес | |
| 4 | Информатика | сетевая система дистанционного управления | система телемандо де редес | |
| Технический | ||||
| 5 | Технический | система оповещения с дистанционным управлением | система сигнализации для дистанционного управления | |
| Воздухоплавание | ||||
| 6 | Воздухоплавание | шт (sigia) система дистанционного управления | система дистанционного управления | |
Произношение системы дистанционного управления
Gale Apps — Технические трудности
Приложение, к которому вы пытаетесь получить доступ, в настоящее время недоступно. Приносим свои извинения за доставленные неудобства. Повторите попытку через несколько секунд.
Если проблемы с доступом сохраняются, обратитесь за помощью в наш отдел технической поддержки по телефону 1-800-877-4253. Еще раз спасибо, что выбрали Gale, обучающую компанию Cengage.
org.springframework.remoting.RemoteAccessException: невозможно получить доступ к удаленной службе [authorizationService@theBLISAuthorizationService]; вложенным исключением является com.zeroc.Ice.UnknownException
unknown = «java.lang.IndexOutOfBoundsException: индекс 0 выходит за границы для длины 0
в java.base/jdk.internal.util.Preconditions.outOfBounds(Preconditions.java:64)
в java.base/jdk.internal.util.Preconditions.outOfBoundsCheckIndex(Preconditions.java:70)
в java.base/jdk.internal.util.Preconditions.checkIndex(Preconditions.java:248)
в java.base/java.util.Objects.checkIndex(Objects.java:372)
в java.base/java.util. ArrayList.get(ArrayList.java:458)
в com.gale.blis.data.subscription.dao.LazyUserSessionDataLoaderStoredProcedure.populateSessionProperties(LazyUserSessionDataLoaderStoredProcedure.java:60)
в com.gale.blis.data.subscription.dao.LazyUserSessionDataLoaderStoredProcedure.reQuery(LazyUserSessionDataLoaderStoredProcedure.java:53)
в com.gale.blis.data.model.session.UserGroupEntitlementsManager.reinitializeUserGroupEntitlements(UserGroupEntitlementsManager.java:30)
в com.gale.blis.data.model.session.UserGroupSessionManager.getUserGroupEntitlements(UserGroupSessionManager.java:17)
в com.gale.blis.api.authorize.contentmodulefetchers.CrossSearchProductContentModuleFetcher.getProductSubscriptionCriteria(CrossSearchProductContentModuleFetcher.java:244)
на com.gale.blis.api.authorize.contentmodulefetchers.CrossSearchProductContentModuleFetcher.getSubscribedCrossSearchProductsForUser(CrossSearchProductContentModuleFetcher. java:71)
на com.gale.blis.api.authorize.contentmodulefetchers.CrossSearchProductContentModuleFetcher.getAvailableContentModulesForProduct(CrossSearchProductContentModuleFetcher.java:52)
на com.gale.blis.api.authorize.strategy.productentry.strategy.AbstractProductEntryAuthorizer.getContentModules(AbstractProductEntryAuthorizer.java:130)
на com.gale.blis.api.authorize.strategy.productentry.strategy.CrossSearchProductEntryAuthorizer.isAuthorized(CrossSearchProductEntryAuthorizer.java:82)
на com.gale.blis.api.authorize.strategy.productentry.strategy.CrossSearchProductEntryAuthorizer.authorizeProductEntry(CrossSearchProductEntryAuthorizer.java:44)
на com.gale.blis.api.authorize.strategy.ProductEntryAuthorizer.authorize(ProductEntryAuthorizer.java:31)
в com.gale.blis.api.BLISAuthorizationServiceImpl.authorize_aroundBody0(BLISAuthorizationServiceImpl.java:57)
на com.gale.blis.api.BLISAuthorizationServiceImpl. authorize_aroundBody1$advice(BLISAuthorizationServiceImpl.java:61)
на com.gale.blis.api.BLISAuthorizationServiceImpl.authorize(BLISAuthorizationServiceImpl.java:1)
в com.gale.blis.auth.AuthorizationService._iceD_authorize(AuthorizationService.java:97)
в com.gale.blis.auth.AuthorizationService._iceDispatch(AuthorizationService.java:406)
в com.zeroc.IceInternal.Incoming.invoke(Incoming.java:221)
в com.zeroc.Ice.ConnectionI.invokeAll(ConnectionI.java:2706)
на com.zeroc.Ice.ConnectionI.dispatch(ConnectionI.java:1292)
в com.zeroc.Ice.ConnectionI.message(ConnectionI.java:1203)
в com.zeroc.IceInternal.ThreadPool.run(ThreadPool.java:412)
в com.zeroc.IceInternal.ThreadPool.access$500(ThreadPool.java:7)
в com.zeroc.IceInternal.ThreadPool$EventHandlerThread.run(ThreadPool.java:781)
в java.base/java.lang.Thread.run(Thread.java:834)
»
org. springframework.remoting.ice.IceClientInterceptor.convertIceAccessException(IceClientInterceptor.java:348)
org.springframework.remoting.ice.IceClientInterceptor.invoke(IceClientInterceptor.java:310)
org.springframework.remoting.ice.MonitoringIceProxyFactoryBean.invoke(MonitoringIceProxyFactoryBean.java:71)
org.springframework.aop.framework.ReflectiveMethodInvocation.proceed(ReflectiveMethodInvocation.java:186)
org.springframework.aop.framework.JdkDynamicAopProxy.invoke(JdkDynamicAopProxy.java:215)
com.sun.proxy.$Proxy151.authorize(Неизвестный источник)
com. gale.auth.service.BlisService.getAuthorizationResponse(BlisService.java:61)
com.gale.apps.service.impl.MetadataResolverService.resolveMetadata(MetadataResolverService.java:65)
com.gale.apps.controllers.DiscoveryController.resolveDocument(DiscoveryController.java:57)
com.gale.apps.controllers.DocumentController.redirectToDocument(DocumentController.java:22)
jdk.internal.reflect.GeneratedMethodAccessor289.invoke (неизвестный источник)
java.base/jdk.internal.reflect.DelegatingMethodAccessorImpl.invoke(DelegatingMethodAccessorImpl.java:43)
java. base/java.lang.reflect.Method.invoke(Method.java:566)
org.springframework.web.method.support.InvocableHandlerMethod.doInvoke(InvocableHandlerMethod.java:205)
org.springframework.web.method.support.InvocableHandlerMethod.invokeForRequest(InvocableHandlerMethod.java:150)
org.springframework.web.servlet.mvc.method.annotation.ServletInvocableHandlerMethod.invokeAndHandle(ServletInvocableHandlerMethod.java:117)
org.springframework.web.servlet.mvc.method.annotation.RequestMappingHandlerAdapter.invokeHandlerMethod (RequestMappingHandlerAdapter.java:895)
org.springframework.web. servlet.mvc.method.annotation.RequestMappingHandlerAdapter.handleInternal (RequestMappingHandlerAdapter.java:808)
org.springframework.web.servlet.mvc.method.AbstractHandlerMethodAdapter.handle(AbstractHandlerMethodAdapter.java:87)
org.springframework.web.servlet.DispatcherServlet.doDispatch(DispatcherServlet.java:1067)
org.springframework.web.servlet.DispatcherServlet.doService(DispatcherServlet.java:963)
org.springframework.web.servlet.FrameworkServlet.processRequest(FrameworkServlet.java:1006)
org.springframework.web.servlet.FrameworkServlet.doGet(FrameworkServlet.java:898)
javax. servlet.http.HttpServlet.service(HttpServlet.java:626)
org.springframework.web.servlet.FrameworkServlet.service(FrameworkServlet.java:883)
javax.servlet.http.HttpServlet.service(HttpServlet.java:733)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:227)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.apache.tomcat.websocket.server.WsFilter.doFilter(WsFilter.java:53)
org.apache.catalina.core.ApplicationFilterChain. internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.apache.catalina.filters.HttpHeaderSecurityFilter.doFilter(HttpHeaderSecurityFilter.java:126)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.web.servlet.resource.ResourceUrlEncodingFilter.doFilter(ResourceUrlEncodingFilter.java:67)
org. apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.web.filter.RequestContextFilter.doFilterInternal (RequestContextFilter.java:100)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org. springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:102)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:102)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org. owasp.validation.GaleParameterValidationFilter.doFilterInternal(GaleParameterValidationFilter.java:97)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.boot.web.servlet.support.ErrorPageFilter.doFilter(ErrorPageFilter.java:126)
org.springframework.boot.web.servlet.support.ErrorPageFilter.access$000(ErrorPageFilter.java:64)
org. springframework.boot.web.servlet.support.ErrorPageFilter$1.doFilterInternal(ErrorPageFilter.java:101)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.springframework.boot.web.servlet.support.ErrorPageFilter.doFilter(ErrorPageFilter.java:119)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.web.filter.FormContentFilter.doFilterInternal (FormContentFilter.java:93)
org. springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.boot.actuate.metrics.web.servlet.WebMvcMetricsFilter.doFilterInternal (WebMvcMetricsFilter.java:96)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain. java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org.springframework.web.filter.CharacterEncodingFilter.doFilterInternal (CharacterEncodingFilter.java:201)
org.springframework.web.filter.OncePerRequestFilter.doFilter(OncePerRequestFilter.java:117)
org.apache.catalina.core.ApplicationFilterChain.internalDoFilter(ApplicationFilterChain.java:189)
org.apache.catalina.core.ApplicationFilterChain.doFilter(ApplicationFilterChain.java:162)
org. apache.catalina.core.StandardWrapperValve.invoke(StandardWrapperValve.java:202)
org.apache.catalina.core.StandardContextValve.invoke(StandardContextValve.java:97)
org.apache.catalina.authenticator.AuthenticatorBase.invoke(AuthenticatorBase.java:542)
org.apache.catalina.core.StandardHostValve.invoke(StandardHostValve.java:143)
org.apache.catalina.valves.ErrorReportValve.invoke(ErrorReportValve.java:92)
org.apache.catalina.valves.AbstractAccessLogValve.invoke(AbstractAccessLogValve.java:687)
org. apache.catalina.core.StandardEngineValve.invoke(StandardEngineValve.java:78)
org.apache.catalina.connector.CoyoteAdapter.service(CoyoteAdapter.java:357)
org.apache.coyote.http11.Http11Processor.service(Http11Processor.java:374)
org.apache.coyote.AbstractProcessorLight.process(AbstractProcessorLight.java:65)
org.apache.coyote.AbstractProtocol$ConnectionHandler.process(AbstractProtocol.java:893)
org.apache.tomcat.util.net.NioEndpoint$SocketProcessor.doRun(NioEndpoint.java:1707)
org.apache.
