Как правильно подключить и настроить сервопривод к плате Arduino. Какие ограничения нужно учитывать при выборе сервопривода. Как управлять неиспользуемыми выводами Arduino с помощью команд. Какие меры предосторожности нужно соблюдать при работе с сервоприводами.
Основные принципы работы с сервоприводами на Arduino
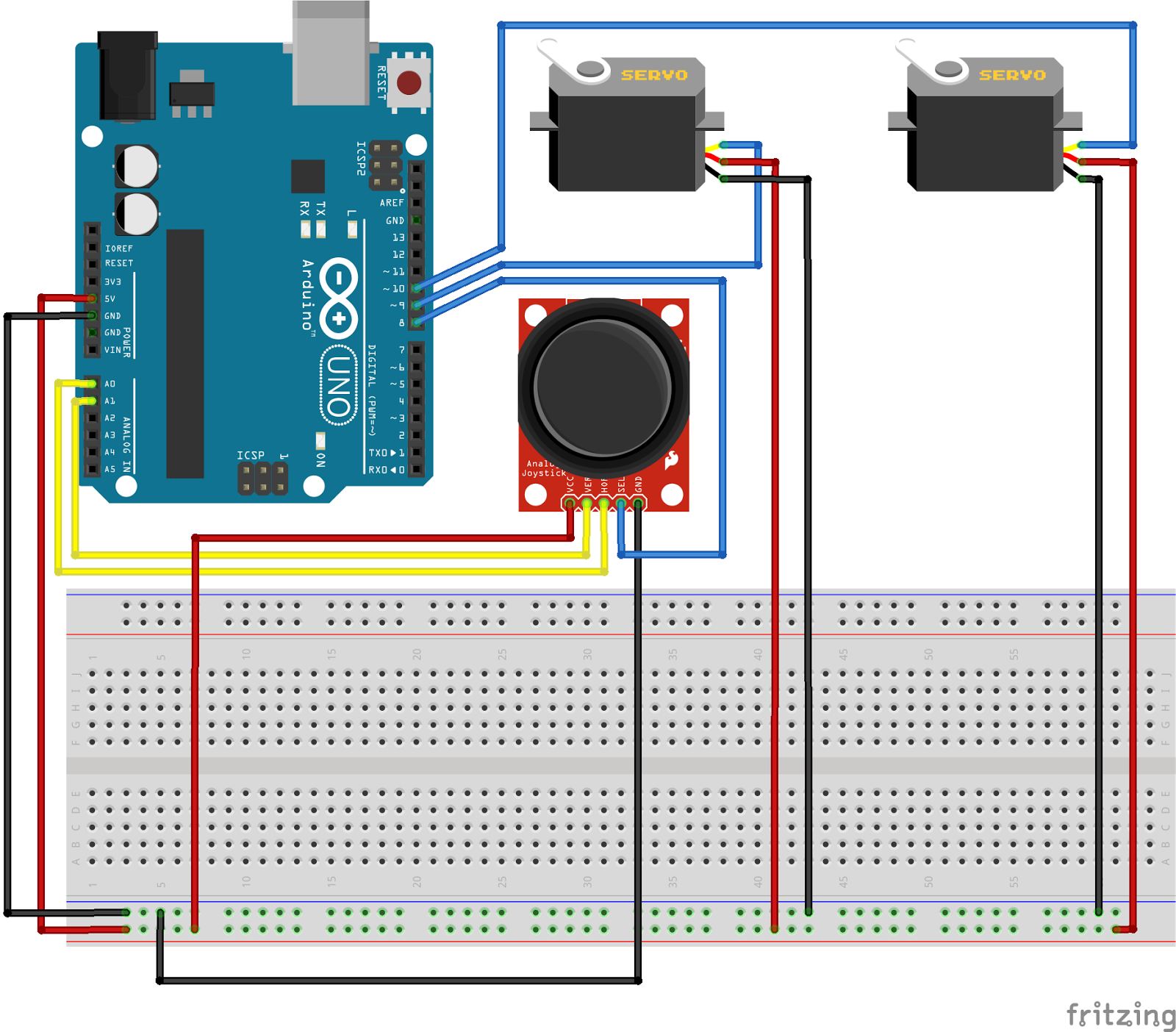
Сервоприводы широко используются в робототехнике и различных Arduino-проектах для точного позиционирования. Однако при их подключении и использовании необходимо учитывать ряд важных моментов:
- Ограничения по току питания платы Arduino
- Риски, связанные с рекуперативным торможением сервопривода
- Необходимость правильного выбора сервопривода по характеристикам
- Особенности управления сервоприводами через команды прошивки
Рассмотрим эти аспекты подробнее, чтобы обеспечить корректную и безопасную работу сервоприводов в вашем проекте.
Ограничения по току при подключении сервоприводов
Одним из ключевых параметров при выборе сервопривода является его энергопотребление. Необходимо учитывать следующие токовые характеристики:

- Ток холостого хода — потребление при отсутствии нагрузки
- Рабочий ток — среднее потребление при движении
- Ток остановки — максимальный ток при блокировке вала
Ток остановки сервопривода не должен превышать максимально допустимый ток платы Arduino по линии 5В. Для разных моделей Arduino этот предел составляет:
- Arduino Uno, Nano — до 500 мА
- Arduino Mega — до 800 мА
- Arduino Due — до 800 мА
При этом нужно учитывать потребление самой платы и других подключенных устройств. Рекомендуется оставлять запас по току минимум 20-30%.
Риски рекуперативного торможения сервопривода
При резкой остановке или смене направления вращения сервопривод может генерировать обратный ток в цепь питания. Это явление называется рекуперативным торможением и несет следующие риски:
- Повышение напряжения на шине 5В выше допустимого
- Выход из строя стабилизатора питания Arduino
- Повреждение других устройств, подключенных к 5В
- Сброс или зависание микроконтроллера
Чтобы избежать этих проблем, рекомендуется использовать следующие меры:

- Подключать сервопривод через диод Шоттки и конденсатор
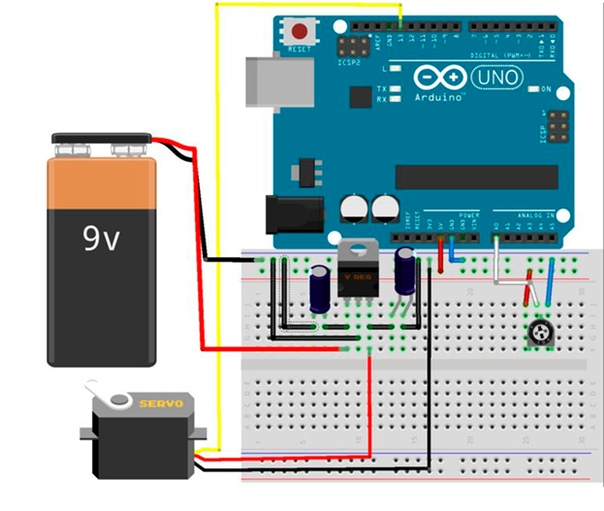
- Использовать отдельный источник питания для сервопривода
- Выбирать сервоприводы с низким током рекуперации
- Ограничивать скорость вращения программно
Правильная защита от рекуперативных токов поможет обеспечить стабильную работу всей системы.
Выбор подходящего сервопривода для Arduino
При выборе сервопривода для проекта на Arduino следует ориентироваться на следующие параметры:
- Рабочее напряжение — должно соответствовать 5В
- Ток потребления — в пределах возможностей платы
- Крутящий момент — достаточный для решения задачи
- Скорость вращения — оптимальная для применения
- Угол поворота — 180° или 360° в зависимости от задачи
Хорошим выбором для большинства проектов являются микросервоприводы с характеристиками:
- Вес: 9-12 г
- Крутящий момент: 1.2-1.8 кг*см
- Скорость: 0.1-0.12 сек/60°
- Рабочий ток: до 200 мА
- Ток остановки: до 700 мА
Такие сервоприводы, например Tower Pro SG90, можно напрямую подключать к Arduino без дополнительных схем защиты. Для более мощных моделей потребуются меры предосторожности.

Управление сервоприводами через команды прошивки
В прошивках для 3D-принтеров на базе Arduino, таких как Marlin, для управления сервоприводами используются специальные G-коды:
- M280 — установка положения сервопривода
- M281 — настройка границ сервопривода
- M282 — проверка позиции сервопривода
Пример использования команды M280:
M280 P0 S90 ; повернуть сервопривод 0 на 90 градусов
M280 P1 S0 ; повернуть сервопривод 1 в исходное положение
Параметры команды:
- P — номер сервопривода (0-3)
- S — угол поворота в градусах (0-180)
Перед использованием сервопривода его необходимо инициализировать в конфигурации прошивки, указав номер пина подключения.
Управление неиспользуемыми выводами Arduino
Свободные цифровые и аналоговые выводы Arduino можно задействовать для управления дополнительной периферией. Для этого в прошивках используется команда M42:
M42 P4 S255 ; установить высокий уровень на пине D4
M42 P14 S128 ; установить ШИМ 50% на пине A0
M42 P4 S0 ; установить низкий уровень на пине D4
Параметры команды M42:
- P — номер пина (0-69 для цифровых, 54-69 для аналоговых)
- S — значение (0-255)
Это позволяет использовать свободные выводы Arduino для управления реле, светодиодами, шаговыми двигателями и другими устройствами непосредственно из G-кода.
Меры предосторожности при работе с сервоприводами
Чтобы обеспечить надежную работу сервоприводов и избежать повреждения Arduino, соблюдайте следующие правила:
- Не превышайте максимально допустимый ток платы
- Используйте отдельное питание для мощных сервоприводов
- Ограничивайте ход сервопривода программно и механически
- Не допускайте длительной блокировки вала сервопривода
- Применяйте схемы защиты от обратных токов
- Обеспечьте хорошее охлаждение при интенсивной работе
- Периодически проверяйте нагрев сервопривода и платы
Соблюдение этих мер позволит безопасно интегрировать сервоприводы в ваш проект на базе Arduino и обеспечить их длительную и стабильную работу.
Заключение
Сервоприводы значительно расширяют возможности проектов на Arduino, позволяя реализовать точное позиционирование и управление движением. При правильном подборе, подключении и настройке сервоприводов можно добиться отличных результатов. Главное — учитывать ограничения платы по току, использовать защитные схемы и соблюдать рекомендации по эксплуатации. С накоплением опыта вы сможете эффективно применять сервоприводы в самых разных Arduino-проектах.
Проблемы при сборке Наливатора с которыми вы можете столкнуться
Опубликовано автором Runprod
Не так давно я повторил проект наливатор от Алекса Гайвера, и хотя видео на ютубе набрало не так уж и много просмотров, люди начали стучаться мне на почту и писать в комментах с просьбой о помощи, задавая вопросы по поводу сборки и проекта в целом.
И тут я подумал, что не плохо было бы рассказать о всех проблемах с которыми столкнулся лично я и все те кто собирал данный девайс. Начнем с тех проблем с которыми столкнулся лично я.
Отсутствует реверс сервопривода
Первый затык в котором виноват я сам случился с сервоприводом. Собрав всю схему и начав тестировать ее работоспособность я столкнулся с проблемой отсутствия реверса поворота, то есть шестеренка сервопривода вращалась только в одну сторону. Покопавшись пару часов я узнал что сервопривод который мне пришел на 360 градусов вместо 180 как необходимо. А получилось это из за простой невнимательности и потому что в большинстве своем приводы под 180 градусов имеют пластиковые шестерни, а на приводе под 360 стояли металлические, хотелось как вы понимаете металлические.
А получилось это из за простой невнимательности и потому что в большинстве своем приводы под 180 градусов имеют пластиковые шестерни, а на приводе под 360 стояли металлические, хотелось как вы понимаете металлические.
Ошибки при прошивке ардуино
Следующий казус произошел во время прошивки и случился он так же из за моей невнимательности. В общем я пытался компилировать и залить прошивку без библиотек. При этом прошивка выдавала тонну ошибок и естественно не заливалась.Говоря о прошивке хотел бы сразу сказать что даже при нормальном заливе ее на плату возникают предупреждения такового плана. Они предупреждают о том что некоторые данные могут быть не правильно преобразованы. При этом прошивка станет как надо и все должно работать.
Ошибки оповещающие об отсутствии библиотек Предупреждения при нормальной прошивкеТак же можете посмотреть видео по прошивке ардуино.
Из гусака капает
Очень частый вопрос которым задавался наверное каждый кто повторял этот проект был “Что делать что бы из гусака не капали остатки жидкостей”. И тут на самом деле решений было очень много, от установки обратного клапана в качестве которого можно использовать клапан для аквариумов или автомобильного стеклоомывателя до уменьшения скорости сервопривода настроить которую можно в скетче.
Сервопривод дергается
Проблемы наблюдались и с сервоприводом который дергался во время движения, тем самым разбрызгивая драгоценные капли и заливая электронику. Тут ребята советовали сделать противовес в том случае если это позволяет конструктивное исполнение, облегчить гусак сделав его меньше или из другого материала, поменять силиконовую трубочку на более мягкую или же поменять сервопривод на более мощный. Так же попадались и бракованные сервоприводы которые трясло как осиновый лист на ветру, так что не стоит отбрасывать и эту причину. Что касается силиконовых трубочек то советовали заглянуть в мед технику или же магазин для аквариумистов.
Так же попадались и бракованные сервоприводы которые трясло как осиновый лист на ветру, так что не стоит отбрасывать и эту причину. Что касается силиконовых трубочек то советовали заглянуть в мед технику или же магазин для аквариумистов.
Глюки, ложные срабатывания, самопроизвольная перезагрузка, дублирование нажатий
У некоторых возникали проблемы с пайкой. Наблюдалась неправильная работа, разного рода глюки, ложные срабатывания, самопроизвольная перезагрузка, дублирование нажатий, тусклое свечение светодиодов и тому подобное. Причиной этому всему может быть неправильная пайка, короткое замыкание и даже кислотный флюс который создавал между контактами токопроводящую среду. Тут могу посоветовать тщательно перепроверить правильность всей пайки по схеме вплоть до “все нахрен распаять и спаять заново” если не очень дружите с паяльником и использовать термоусадочные трубочки в местах близкого расположения контактов, например при пайки платы ардуино.
Нажми что бы увеличитьТак же при неправильной пайке могут наблюдаться проблемы со срабатыванием не тех светодиодов при замыкании соответствующего концевика.
Не работает защита от спящего режима
Лично у меня и еще у нескольких человек на форуме не работала защита от спящего режима повербанка. При этом я подключал 2 разных повербанка и на обоих эта функция не срабатывала. Знаю что вылечить это можно добавлением дополнительной нагрузки, но сам я не проверял и не особо представляю куда именно и главное какой именно резистор впаять что бы все было нормально. Если знаете как это реализовать, буду рад советам в комментах.
Другие ошибки и баги
В большинстве своем множество багов и ошибок связаны с заменой некоторых комплектующих на аналоги или же совсем другие элементы. Так например банально заменив концевики на сенсорные аналоги нужно вносить изменения в электрическую схему, в противном случае при полной загрузке наливатора 4-мя или более рюмками кнопка через определенное количество времени перестает подавать сигнал о том что она нажата и сервопривод вернет гусак в начальное положение не закончив разлив.
Концевики Замена концевиков — сенсорный модуль TTP224Гусак приезжает не на то место
Еще одна ошибка которая скорей всего носит единичный характер проявляется в том, что гусак при установки рюмки приезжает не на то место.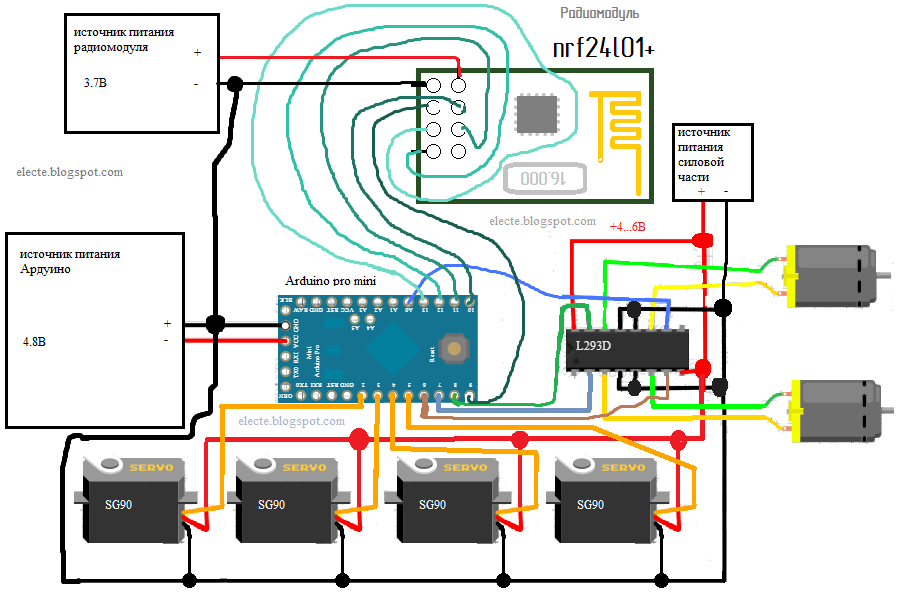 Решение проблемы кроется в неправильно указанных углах для каждой рюмки или же не очередной пайке концевиков. Решить это можно немного подкорректировав скетч вот тут или тут.
Решение проблемы кроется в неправильно указанных углах для каждой рюмки или же не очередной пайке концевиков. Решить это можно немного подкорректировав скетч вот тут или тут.
И это лишь малая часть самых распространенных проблем с которыми столкнулись люди повторяющие проект. В остальном же трудности возникают при всевозможных модификациях наливатора, замене комплектующих и корректировке скетча которые носят сугубо индивидуальный характер и решаются совместным мозговым штурмом.
Могу сказать лишь то что, если собирать проект из заявленных комплектующих, использовать оригинальную прошивку и делать все по инструкции, можно избавить себя от множества ошибок и лишней головной боли, а главное получить рабочую игрушку по итогу.
А если есть желание послушать про полезные доработки вроде сенсорных кнопок которые подойдут для этого проекта, замены сервопривода на шаговый двигатель, замены дисплея и получить некоторые плюшки вроде проекта корпусов для 3D принтера подписывайтесь на ютуб канал и ожидайте новый ролик или же заглядывайте сюда почаще, постараюсь не затягивать и сделать небольшое но полезное видео + статейку. На этом у меня все, спасибо что досмотрели видео до конца, всем пока.
На этом у меня все, спасибо что досмотрели видео до конца, всем пока.
Видео версия
Ардуино
Набор-конструктор для сборки «умной» машинки на Arduino.
Как-то раз возникло у меня желание на практике узнать что такое Arduino и был заказан данный набор. Он предназначен для сборки машинки с ультразвуковым сенсором, которая объезжает препятствия.
Покупать можно, хотя набор и не без недостатков.
Подробнее под катом.
Да, тем кто не в курсе, что такое Arduino, рекомендую почитать сдесь, а также заглянуть сюда.
В квартире мне автоматизировать нечего, а сваять что-нибудь интересное хотелось, поэтому заказал этот конструктор.
Это не самое выгодное предложение на Али, но самое недорогое, которое было на тот момент с возможностью доставки почтой Сингапура(быстрее доставка).
О нелегкой судьбе посылки
Оформлен заказ был 22.07.2013г., прибыло в почтовое отделение 14.08.2013г.
Это моя первая посылка, которая пришла в таком состоянии:
Хотя продавец не поскупился на «пупырку», это не спасло некоторые детали воздействия почты России — сломалась одна из пластиковых площадок для крепления электроники:
Ну не беда, клей в доме есть.
На пластиковые площадки наклеена бумага, чтобы они не царапались при транспортировке.
В комплекте присутствовало всё, что было указано в описании лота:
— два мотора с редукторами,
— пара колес,
— ролик (типа мебельного, только маленький),
— две пластиковых площадки,
— сервопривод,
— поворотный кронштейн для крепления датчика расстояния,
— набор латунных стоек и винтиков-гаечек,
— ультразвуковой датчик расстояния,
— электронная плата управления двигателями,
— маленькая макетная плата,
— держатель для 6 батарей формата АА,
— держатель для батареи типа «Крона»,
— плата с микроконтроллером, Arduino-совместимая Funduino. Версия Duemilanove с небольшими доработками.
Версия Duemilanove с небольшими доработками.
— интерфейсный USB-кабель для подключения к ПК,
— комплект соединительных проводков типа мама-мама.
Вот полезное содержимое посылки, нет только поломанной верхней площадки:
При сборке мне дополнительно понадобилось около десятка проводков типа папа-мама.
В глубине души я надеялся, что добрый китаец положит в коробочку хотя бы инструкцию по сборке, или может даже диск с программным кодом для контроллера, но мои надежды не оправдались.
Машинка изначально была частично собрана, верхняя и нижняя площадки были скреплены между собой с помощью стоек и винтиков, были установлены редукторы с двигателями.
Качество изготовления электронных компонентов особых нареканий не вызывает, качество скажем так «хорошее китайское».
А вот качество изготовления пластиковых площадок могло бы быть получше — размечены кривовато. Есть смещение крепежных отверстий одной площадки относительно другой.
Кроме того стойки для крепления площадок между собой были разной длины.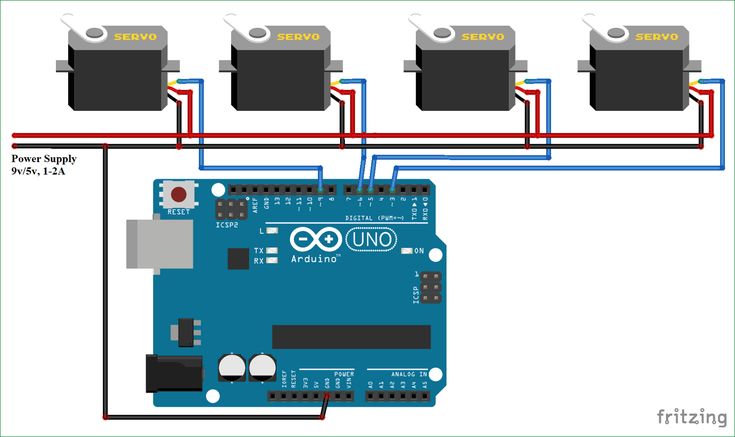
Идущий в комплекте кронштейн для крепления ультразвукового датчика не предназначен для крепления этого самого датчика, он предназначен для использования вместе с парой сервоприводов для крепления камеры. Не беда — применим стальную проволоку и все будет ОК:
Также пришлось подрезать-подточить пластиковую крестовину крепления сервопривода (думаю сервопривод тоже должен быть другой модели).
Но все эти недостатки не мешают собрать вполне работоспособное устройство.
Идущие в комплекте держатели для батареек я использовать не стал — запитал всю схему от пары литиевых аккумуляторов типа 18650. Также добавил в схему вольтметр и кнопку запуска программы.
Вот что получилось в итоге:
Еще немного фото
Поскольку, как я уже упоминал, продавец не вложил никаких инструкций, пришлось всю информацию искать в интернете самому. Готовые библиотеки для управления сервоприводом и УЗ-датчиком я не использовал, все писал сам. Вот немного ссылок, которые могут помочь разобраться в работе этих устройств:
Плата управления двигателями.
УЗ-сенсор.
Сервопривод.
Алгоритм работы машинки простой:
— едем вперед, УЗ-сенсор отслеживает расстояние до препятствия,
— если препятствие близко останавливаемся и отъезжаем назад,
— вертим УЗ-сенсором по сторонам и определяем где до препятствий наибольшее расстояние,
— разворачиваемся в ту сторону и едем,
— все повторяется.
Несмотря на то, что после сборки остались лишние винтики все работает. Вот видео с демонстрацией работы устройства:
Видно, что машинка не очень хорошо определяет наличие препятствий, особенно если плоскость препятствия находится не перпендикулярно направлению движения машинки. Это связано с тем, что во-первых звук может отражаться от препятствия и сенсор неверно определяет расстояние до предмета, во-вторых у сенсора достаточно узкий рабочий угол — 15 градусов. Также звук может просто поглощаться некоторыми предметами, например мягкими игрушками.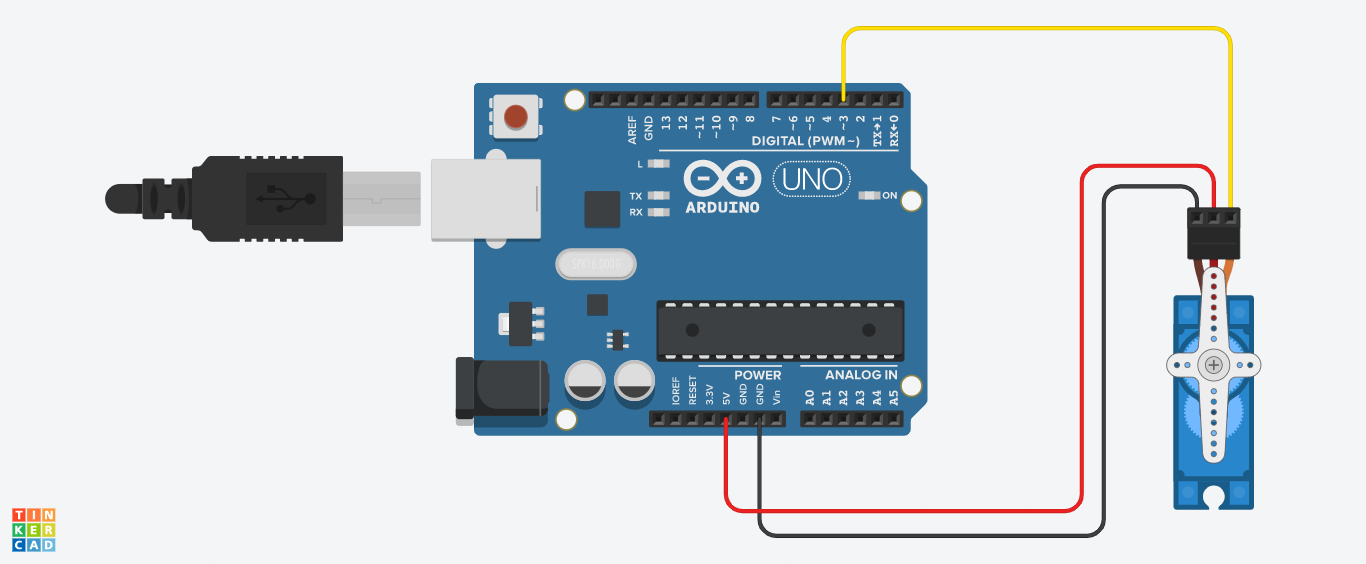 Частично эту проблему можно решить установкой спереди машинки дополнительных датчиков, направленных под углом к направлению движения.
Частично эту проблему можно решить установкой спереди машинки дополнительных датчиков, направленных под углом к направлению движения.
В общем игрушкой я доволен, мозг размял и вообще.
Если вдруг кто-то хочет приобщить своих чад к занятию электроникой, думаю такой конструктор может быть полезен.
Ссылка на скетч (программу для контроллера) — вот.
Благодарю за внимание.
Стандартный микро сервопривод HS-81 | HITEC RCD USA
Деталь №: 31081S
Купить сейчас:
Описание продукта
Самый популярный сервопривод Hitec — HS-81, шестерни из пластмассы или металла — можно выбрать из двух вариантов. Популярный сервопривод для небольших самолетов, вертолетов, лодок, легковых и грузовых автомобилей, HS-81 предлагает прекрасный баланс между скоростью и крутящим моментом.
Характеристики
- Лидер продаж Micro Servo
- Мощный трехполюсный ферритовый двигатель
- Прочные нейлоновые шестерни
Принадлежности
- Набор нейлоновых шестерен | Ссылка |
- Набор пластиковых кейсов | Ссылка |
- Подходящие рупоры
Технические характеристики сервопривода HS-81
| Технические характеристики | |
| Диапазон рабочего напряжения (В постоянного тока) | 4,8 В ~ 6,0 В |
| Скорость (секунда при 60°) | 0,11 ~ 0,09 |
Максимальный диапазон крутящего момента унций. / в. / в. |
36 ~ 42 |
| Максимальный диапазон крутящего момента кг. / см. | 2,6 ~ 3,0 |
| Потребление тока в режиме ожидания | 8,8 мА |
| Потребление рабочего тока без нагрузки | 280 мА |
| Потребляемый ток при остановке | 1500 мА |
| Ширина зоны нечувствительности | 8 мкс |
| Физические характеристики | |
| Размеры (дюймы) | 1,17 х 0,47 х 1,16 |
| Размеры (метрические) | 29,8 х 12,0 х 29,6 |
| Вес (унции) | 0,58 |
| Вес (грамм) | 16,6 |
| Тип цепи | HT7003 Аналоговый SMT |
| Тип двигателя | 3-полюсный металлический щеточный феррит |
| Материал шестерни | Нейлон |
| Тип подшипника | Нет |
| Выходной вал (тип / Øмм) | Стандарт 24 |
| Материал корпуса | Пластик |
| Защита от пыли и воды | Н/Д |
| Калибр соединителя (AWG) / количество нитей | 28 / 20 |
| Приложения для радиоуправления | |
| Паркфлаер | < 50 унций. |
| Спортивный самолет | 42–50 унций. |
| Планер | < 2 м / DLG |
| Производительность 3D | Н/Д |
| Весы | Н/Д |
| Электрический вертолет | 400–500 мм |
| Газовый вертолет | 30 — 39 Класс |
| На дороге | Н/Д |
| Монстр-трак | Н/Д |
| Багги | Н/Д |
| Трагги | Н/Д |
| Короткий курс / Грузовик | Н/Д |
| Гусеничные тележки | Н/Д |
| Парусная лодка | Н/Д |
| Моторная лодка | Н/Д |
Использование сервоприводов и управление неиспользуемыми выводами ввода-вывода
Контакт ввода/вывода переключателя Gcodes M42 и положение сервопривода M280 позволяют напрямую управлять некоторыми контактами или переназначать эти контакты для управления сервоприводами для хобби PWM.
Сервоприводы ‘Hobby’ могут быть подключены и управляться линейкой плат Duet. Тем не менее, существуют ограничения на размер сервопривода, который может питаться напрямую из-за потребляемого тока сервопривода (особенно, когда он останавливается, т. поворачивать («рекуперативное торможение»). Оба эти фактора могут повредить Duet и/или подключенные к нему периферийные устройства, например PanelDue.
Ток останова – это максимальный ток, потребляемый двигателем при приложении максимального крутящего момента либо из-за того, что он не может двигаться полностью, либо из-за того, что он больше не может ускоряться под нагрузкой, под которой он находится. Это «в нормальных условиях», т. е. двигателю не предлагается перейти от максимальной скорости в одном направлении к максимальной скорости в другом, что может генерировать еще более высокие токи.
Ток останова вашего сервопривода не должен превышать доступный ток Duet (см. Ограничение тока платы Duet 5V ниже), и желательно иметь некоторый резервный ток, поэтому не указывайте сервопривод, который использует весь оставшийся ток. Эффект слишком большого потребления сервоприводом будет заключаться в падении напряжения на шине 5 В, что, скорее всего, приведет к сбросу платы Duet, но может повредить регулятор 5 В.
Эффект слишком большого потребления сервоприводом будет заключаться в падении напряжения на шине 5 В, что, скорее всего, приведет к сбросу платы Duet, но может повредить регулятор 5 В.
Сервоприводы, получившие команду за пределы их движения, обычно останавливаются. Это нагревает как сервопривод, так и Duet. Сервопривод, скорее всего, сгорит, если его держать в таком состоянии. Итак:
- Убедитесь, что Duet может обеспечить ток останова.
- Либо будьте очень осторожны, чтобы не дать команду сервоприводу выйти за его рабочий диапазон, либо скомандуйте сервоприводу двигаться, удерживайте его в течение короткого времени, затем используйте M280 P# S0, чтобы остановить управление сервоприводом (замените # номером контакта или номер GpOut как обычно).
Когда сервопривод перестает двигаться, он может подавать большой ток на шину +5 В из-за рекуперативного торможения (серводвигатель фактически становится генератором). Если флажок не установлен, это может привести к увеличению напряжения на шине +5 В выше безопасного предела. Это применимо независимо от того, подключен ли сервопривод непосредственно к Duet или к подключенной плате расширения или коммутационной плате расширения. См. «Рекомендации» ниже.
Это применимо независимо от того, подключен ли сервопривод непосредственно к Duet или к подключенной плате расширения или коммутационной плате расширения. См. «Рекомендации» ниже.
В общем случае существует корреляция между током остановки и величиной тока, вырабатываемого сервоприводом при рекуперативном торможении. Тем не менее, сервопривод, у которого ток останова близок к доступному току 5 В от Duet, может по-прежнему подавать достаточный ток в шину 5 В, чтобы создать проблему.
- Повышение напряжения на шине 5 В из-за рекуперативного торможения может быть решено путем подключения диода Шоттки между выходом Duet +5 В и входом питания сервопривода +5 В, а также конденсатора 220 мкФ между +5 В сервопривода и заземлением сервопривода
- Обеих проблем можно избежать питанием сервопривода от отдельного источника +5.
Ограничение по току является суммой для 5В и 3,3В. Вычтите любое потребление тока, включая внутреннее потребление тока (обычно около 200-300 мА), любой дисплей PanelDue или другой дисплей, подключенные и запитанные SBC и периферийные устройства, а также любые торцевые заглушки/датчики Z, которые потребляют значительную мощность, чтобы найти доступный ток для подключенного серво.
| 5V current limit | |
| Duet 2 WiFi / Ethernet / Maestro | 2.0 A |
| Duet 3 Mainboard 6HC | 3.0 A |
| Duet 3 Mini 5+ | 1.0 A |
Существует множество различных типов сервоприводов для хобби, и мы не рекомендуем какой-либо конкретный. Проверьте характеристики любого сервопривода, который вы подключаете к Duet, в частности ток холостого хода, работы и остановки. Как правило, так называемая ‘9g’ сервоприводы должны подключаться напрямую (но, пожалуйста, проверьте характеристики вашего сервопривода! И см. примечание ниже о Duet 3 MB6HC), но более крупные сервоприводы должны иметь дополнительную защиту или питаться независимо от Duet (см. Рекомендации).
Сервоприводы с аналогичными характеристиками подходят для подключения к Duet без дополнительных схем:
| https://www.towerpro.com.tw/product/sg90… | Микро сервопривод TowerPro SG90 9G] |
| Description | 9g micro-servo |
| Idle current | 6 ± 10 mA |
| Running current | 220 ± 50 mA |
| Stall current | 650 ± 80 mA |
This motor потребует дополнительных схем (см. Рекомендации) или может привести к повреждению Duet и/или подключенных периферийных устройств, особенно из-за рекуперативного торможения.
Рекомендации) или может привести к повреждению Duet и/или подключенных периферийных устройств, особенно из-за рекуперативного торможения.
| TowerPro MG995 | |
| Описание | 55g X-large servo |
| Current draw at idle | 10 mA |
| No load operating current draw | 170 mA |
| Stall current draw | 1200 mA |
On the Duet 2 WiFi/Ethernet/Maestro, если сервопривод возвращает питание (рекуперативное торможение), то внутреннее напряжение шины 5 В увеличится. Это может привести к повреждению других устройств, подключенных к +5 В (например, PanelDue), а также, если подъем будет достаточно высоким, это может привести к выходу из строя драйверов MOSFET (7 В) и регулятора 3,3 В (6,5 В). Если регулятор 3,3 В выйдет из строя, он может вывести из строя и другие компоненты на плате.
Материнская плата Duet 3 6HC
На Duet 3 MB6HC внутреннее и внешнее напряжение 5 В разделены, но встроенный стабилизатор 5 В регулирует внешнюю шину +5 В (это должно было обеспечить постоянную мощность для подключенного RPi). Это означает, что если сервопривод подает питание на внешнее +5 В, внутреннее питание 5 В на короткое время пропадет, что приведет к перезагрузке платы. Опять же, любые другие устройства, подключенные к внешнему +5 В, например. PanelDue может быть поврежден. Это могут сделать даже небольшие сервоприводы ‘9g’.
Это означает, что если сервопривод подает питание на внешнее +5 В, внутреннее питание 5 В на короткое время пропадет, что приведет к перезагрузке платы. Опять же, любые другие устройства, подключенные к внешнему +5 В, например. PanelDue может быть поврежден. Это могут сделать даже небольшие сервоприводы ‘9g’.
В Duet 3 Mini 5+ внутренняя и внешняя линии 5 В разделены, однако встроенный регулятор 5 В регулирует внутреннюю мощность 5 В. Таким образом, сервопривод, перекачивающий питание во внешнее напряжение 5 В, не повредит Duet и не приведет к его сбросу, однако может повредить другие устройства, питающиеся от внешнего источника + 5 В, например. Дисплей PanelDue или 12864.
В RRF 3.x и более поздних версиях контакты не определены при запуске. Прежде чем вы сможете использовать M42 или M280, вы должны создать порт GPIO с помощью M950. Тогда в команде M42 параметр P — это номер порта GPIO, а не номер логического контакта. Duet 2 поддерживает до 10 портов GPIO, пронумерованных от 0 до 9.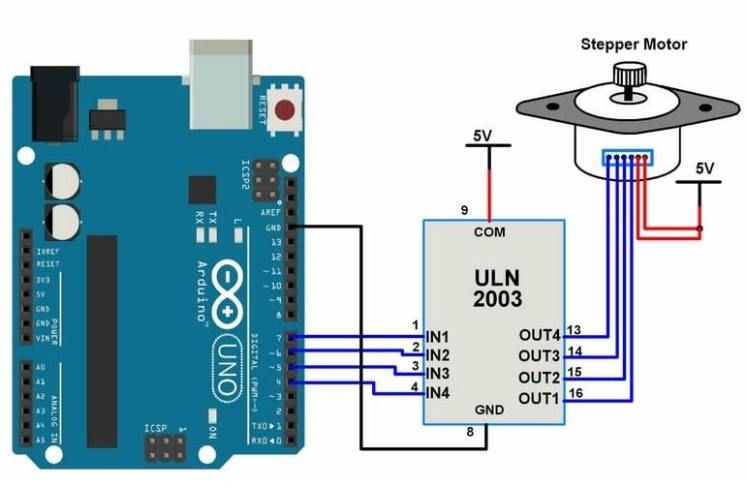 . По умолчанию порты GPIO не выделяются.
. По умолчанию порты GPIO не выделяются.
В RRF_3 параметры F и I больше не поддерживаются в M42. Вместо этого используйте параметры F и I в M950 при создании порта GPIO.
Пример — Код RRF_2:
M42 P3 I1 S0.5 F500 ; установите контакт нагревателя 3 на 50% PWM при 500 Гц
Код RRF_3:
M950 P0 C"exp.heater3" Q500 ; выделить порт GPIO 0 для нагревателя 3 на разъеме расширения, 500 Гц ... M42 P0 S0.5 ; установите 50% PWM на порту GPIO 0
Список имен контактов см. в разделе Имена контактов RRF3.
В оставшейся части этой страницы показано, как настроить M42 и M280 в RRF 2.x.
Начиная с версии микропрограммы 1.16, номера контактов в команде M42 являются логическими номерами контактов, как указано ниже, а не номерами контактов, подобными Arduino. Команда управления сервоприводом M280 использует подмножество тех же номеров контактов.
Обратите внимание, что эти логические номера контактов не являются физическими номерами контактов в заголовке расширения или внутренней нумерацией контактов в микропрограмме.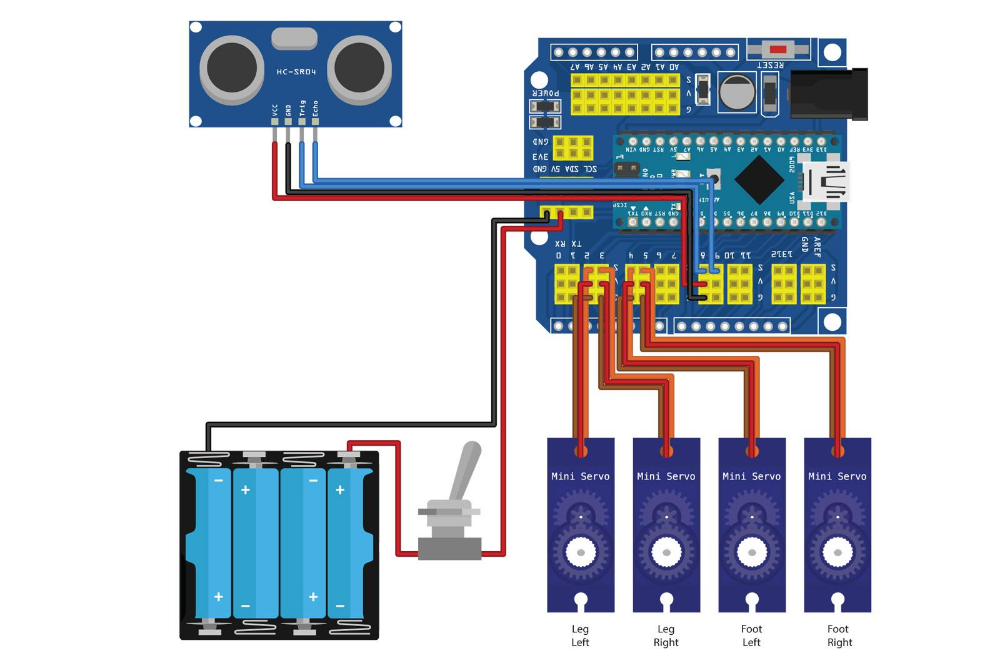
Чтобы узнать, где находятся эти контакты на Duet 2-го поколения, см. электрические схемы Duet
| Номера контактов | Обычная функция | ШИМ? | Можно использовать для сервоприводов? | Примечания |
|---|---|---|---|---|
| 0-7 | Нагреватели 0-7 | да | да | Отключите нагреватель с помощью M307 H# A-1 C-1 D-1, чтобы сделать штифт доступным, где # — штифт номер нагревателя и убедитесь, что ни один инструмент не настроен на использование этого нагревателя. Выходы на разъеме расширения имеют активный низкий уровень с уровнем сигнала 3,3 В. На плате расширения Duex 5 каналы нагревателя 3–7 доступны в виде сигналов 5 В с активным высоким уровнем на разъемах PWM1 и PWM5 соответственно. На DueX2, начиная с версии 0.8a, каналы нагревателя 3-7 доступны на PWM1-PWM5, до этого каналы нагревателя 3-5 доступны только на PWM1-PWM3. Внимание: выходные клеммы нагревателя также будут управляться сигналом ШИМ или сервоимпульсами. |
| 20-27 | Вентиляторы 0-7 | да | 20-22 только | Отключите вентилятор с помощью M106 P# I-1, чтобы сделать контакт доступным, где # — номер вентилятора. Вентиляторы 3-7 находятся на платах расширения Duex 5 и Duex 2. |
| 40-49 | Концевые заглушки 0-9 | нет | нет | 40-44 предназначены только для ввода. На Duet 2 WiFi и Duet 2 Ethernet, если подключена плата расширения Duex 2 или Duex 5, то 45-49 являются концевыми разъемами на плате расширения и предназначены только для ввода; в противном случае они являются дополнительными концевыми соединениями в расширительном разъеме. В Duet 0.6 и 0.8.5 45-48 — это входы торцевых упоров на разъеме расширения. |
| 60- | Miscellaneous pins | varies | varies | The pins available depend on which Duet you have — see below |
| 100- | Pins on expansion devices | varies | varies | Доступные контакты зависят от того, какой у вас Duet — см. ниже ниже |
Разные номера контактов 60–63 соответствуют контактам CS5–CS8 на разъеме расширения. Первоначально они предназначались для использования в качестве концевых контактов E2-E6 и помечены как таковые на разъеме расширения, но теперь вместо этого они используются для адресации термопар и дочерних плат PT100 на Duex 2 или Duex 5. Поскольку большинству пользователей не требуется больше, чем четыре канала термопары и PT100, поддерживаемые Duet 2, мы предлагаем CS5-8 в качестве универсального ввода-вывода, если у вас нет дочерних плат, установленных на Duet 2 или 5.
Будет полезно обратиться к электрической схеме для Duet 2 Wifi/Ethernet и Duex, чтобы определить контакты.
Вот соответствие между номерами контактов, названиями сигналов и метками на разъеме расширения:
| Логический контакт | Название сигнала | Метка разъема расширения | Номер контакта разъема расширения | ШИМ? | Сервопривод? | Примечания |
|---|---|---|---|---|---|---|
| 60 | CS5 | CS5 | 50 | no | no | |
| 61 | CS6 | E3_STOP | 9 | no | no | |
| 62 | CS7 | E4_STOP | 14 | NO | NO | |
| 63 | CS8 | E5_STOP | 19 | NO | NO | |
| 643 | ENCON | .7 on CONN_SD connector | no | no | ||
| 65 | Z_PROBE_MOD | MOD on Z-probe connector | 3 on Z-probe connector | no | no | |
| 100- 103 | ГПИОНА0303 | да | нет | Они находятся на плате расширения на базе SX1509B по адресу I2C 0x71, подключенной к Duet 2 Wifi/Ethernet |
 0043
0043 Логические контакты 64 и 65 поддерживаются только в прошивке 2.01 и выше. Обратите внимание, что вывод Z_PROB_MOD активируется автоматически при выборе некоторых режимов Z-пробника.
Было бы полезно обратиться к электрической схеме Duet 2 Maestro, чтобы определить контакты.
| Логический контакт | Название сигнала | Этикетка разъема расширения | Номер контакта разъема расширения | ШИМ? | Сервопривод? | Notes |
|---|---|---|---|---|---|---|
| 60 | PA21/RXD1/AD8 | EXP0 | 4 | no | no | |
| 61 | PA22/TXD1/AD9 | EXP1 | 5 | no | нет | |
| 62 | PA3/TWD | TWD0 | 9 | no | no | |
| 63 | PA4/TWC | TWCK0 | 8 | no | no | |
| 64 | Z_PROBE_MOD | MOD on Z_PROBE connector, also SERVO on expansion connector | 3 на разъеме Z_PROBE, 11 на разъеме расширения | да | да |
Сопоставление между номерами логических контактов для различных контактов и соответствующими именами сигналов на разъеме расширения выглядит следующим образом.
