Как собрать радиоуправляемый танк на Arduino с нуля. Какие компоненты потребуются для проекта. Как запрограммировать Arduino для управления танком. Как настроить радиоуправление и систему FPV для танка.
Необходимые компоненты для сборки танка на Arduino
Для создания радиоуправляемого танка на базе Arduino понадобятся следующие основные компоненты:
- Arduino Nano или Arduino UNO
- Готовое шасси танка с двумя моторами и гусеницами
- Драйвер двигателей (например, L298N или VNH5019)
- Сервоприводы для управления башней и пушкой (2-3 шт)
- Радиоприемник и передатчик на 2.4 ГГц
- Аккумулятор LiPo на 7.4-11.1В
- FPV камера и видеопередатчик (опционально)
Также потребуются провода, винты, термоклей и другие расходные материалы для сборки. Важно подобрать компоненты, совместимые друг с другом по напряжению питания и токам.
Сборка механической части танка
Сборка механической части танка включает следующие основные этапы:
- Сборка шасси и установка моторов
- Монтаж сервоприводов для башни и пушки
- Установка электроники (Arduino, драйвер, приемник)
- Прокладка проводов и подключение компонентов
- Установка аккумулятора
- Сборка и установка башни с пушкой
При сборке важно обеспечить надежное крепление всех компонентов, чтобы они не повреждались при движении танка. Особое внимание нужно уделить проводке — провода не должны мешать подвижным частям.

Программирование Arduino для управления танком
Для управления танком Arduino нужно запрограммировать следующим образом:
- Настроить выводы для управления моторами через драйвер
- Реализовать функции движения вперед, назад, поворотов
- Настроить управление сервоприводами башни и пушки
- Добавить прием команд с радиоприемника
- Реализовать обработку команд и вызов соответствующих функций
Вот пример базового кода для управления танком на Arduino:
«`cpp #include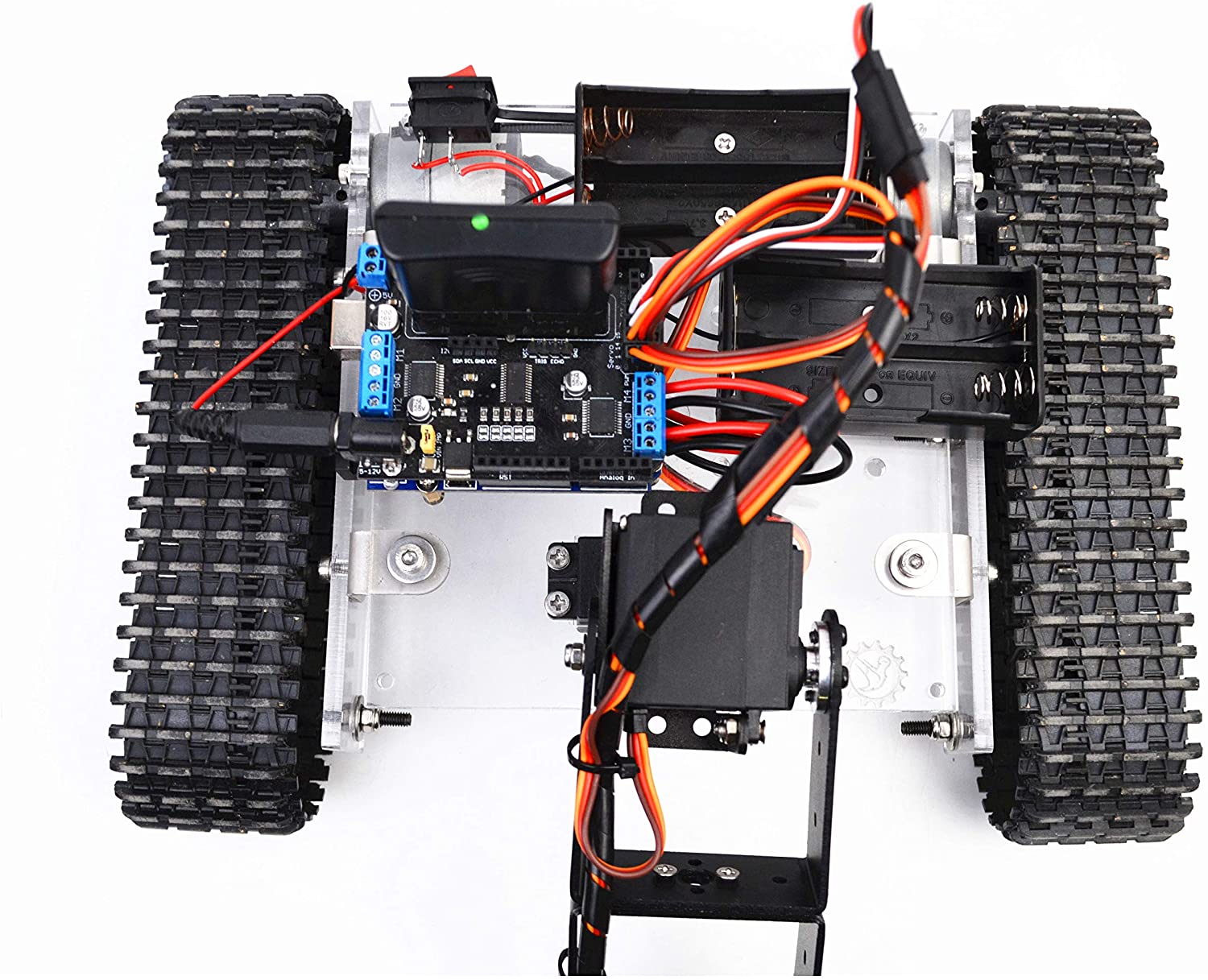
Настройка радиоуправления для танка
Для радиоуправления танком можно использовать готовые RC-модули на 2.4 ГГц. Настройка включает следующие шаги:
- Подключение приемника к Arduino по схеме
- Настройка передатчика (пульта) на нужное количество каналов
- Программирование Arduino для обработки сигналов с приемника
- Калибровка и тестирование управления
Важно правильно настроить соответствие каналов передатчика и функций управления танком. Обычно используется 4-6 каналов для полного управления.
Добавление системы FPV для танка
Система FPV (First Person View) позволяет наблюдать «от первого лица» за движением танка через камеру. Для ее реализации нужно:
- Установить миниатюрную FPV-камеру на башню танка
- Подключить видеопередатчик к камере
- Настроить видеоприемник и экран/очки для просмотра
- Обеспечить питание камеры и передатчика от бортовой сети танка
FPV-система значительно расширяет возможности управления танком, позволяя вести его с видом от первого лица на большом расстоянии.
Тестирование и отладка танка на Arduino
После сборки и программирования нужно провести тщательное тестирование танка:
- Проверить работу всех моторов и сервоприводов
- Протестировать дальность и надежность радиоуправления
- Откалибровать чувствительность управления
- Проверить время работы от аккумулятора
- Настроить FPV-систему (если установлена)
При выявлении проблем нужно поэтапно проверять механическую часть, электронику и программное обеспечение для поиска и устранения неисправностей.
Улучшение базовой модели танка на Arduino
Собранный базовый танк можно улучшать и дорабатывать различными способами:
- Добавление датчиков препятствий для автономного движения
- Установка GPS-модуля для навигации
- Добавление систем имитации выстрелов (светодиоды, динамик)
- Улучшение ходовой части для повышенной проходимости
- Установка более мощных моторов и аккумулятора
Платформа Arduino позволяет постепенно наращивать функциональность танка, превращая его в сложного автономного робота.
Заключение
Сборка радиоуправляемого танка на базе Arduino — увлекательный проект, позволяющий получить практические навыки в робототехнике, электронике и программировании. Начав с простой модели, можно постепенно усложнять конструкцию, добавляя новые возможности. Главное — подходить к процессу творчески и не бояться экспериментировать!
Радиоуправляемый танк на Arduino Nano
Данная статья предлагает познакомиться с технологией создания радиоуправляемой игрушки, ставшей довольно популярной в последнее время.
Для ее изготовления необходимы следующие комплектующие:
- Arduino Nano;
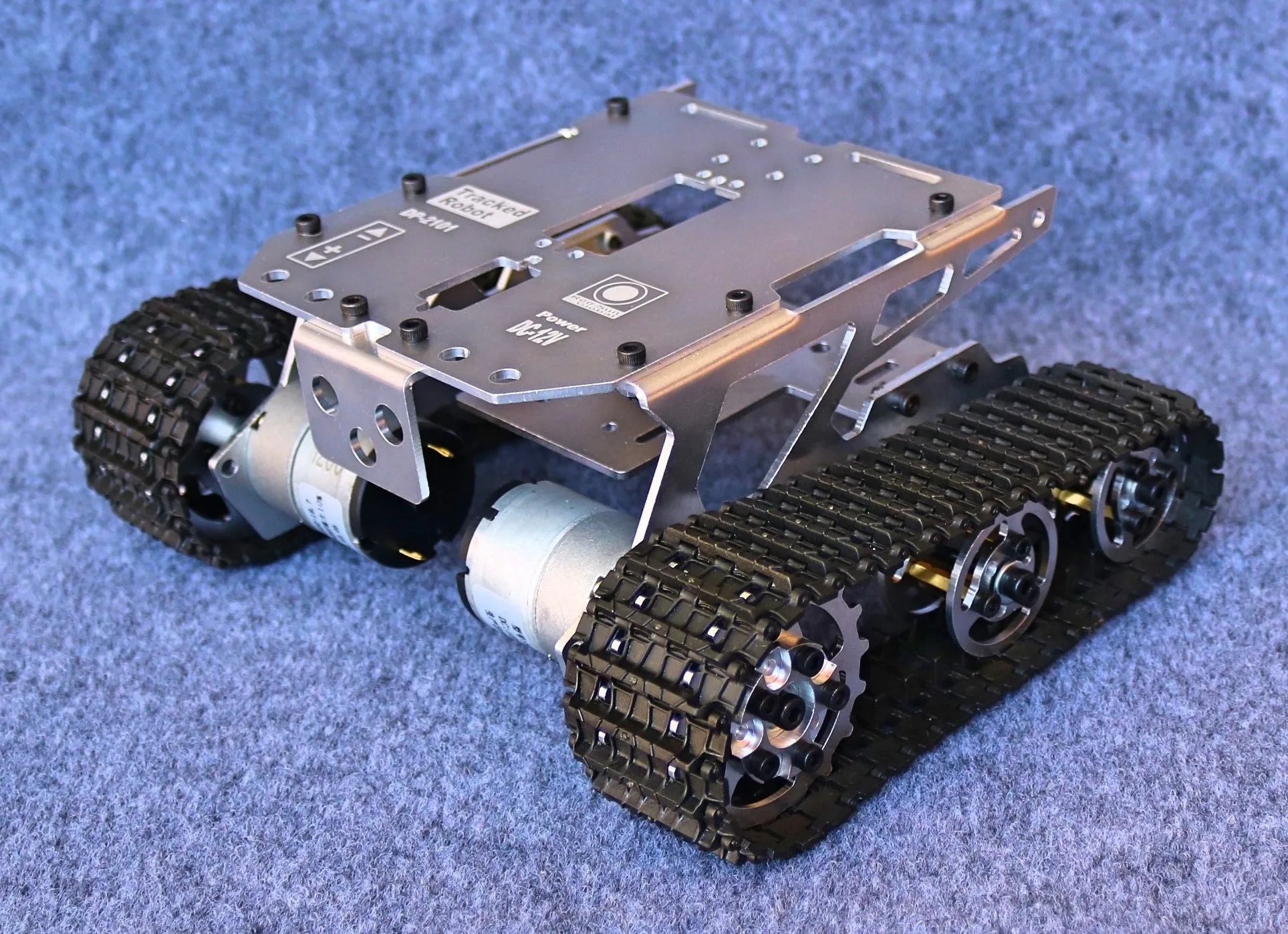
- шасси,
- сервоприводы в количестве 3 штук,
- система поворотов,
- игрушечный пистолет,
- джойстик типа PS2,
- соответствующий модели джойстика приемник,
- аккумуляторные батарейки,
- корпус для аккумуляторов,
- провода,
- лазерная указка.
Готовое шасси уже оснащено двумя двигателями, парой редукторов, переключателем, отсеком для помещения двух аккумуляторных батареек. Приобретение такого готового шасси выгоднее изготовленного самостоятельно.
Первоочередной задачей является закрепление приемника от джойстика на шасси.
С этой целью демонтируйте крышку.
Освободить от крышки следует и редуктор.
Далее проделайте на крышке два отверстия, используемые, в последующем, для монтажа посредством винтов.
Зажатые винтами гайки следует залить клеем для предотвращения их раскрутки в процессе езды и падения в редуктор.
На следующем этапе требуется закрепление драйвера двигателя. Чтобы обеспечить полное закрытие отсека, нужно откусить коннекторы, осуществить зачистку проводов и их пайку к выходам, находящимся непосредственно на драйвере.
Предваряя установку драйвера, обеспечьте работу поворотной системы, необходимой для функционирования танкового дула. С этой целью произведите демонтаж пластиковой системы и установите внутри нее два сервопривода, один из которых предназначен для осуществления горизонтальных движения, а второй – вертикальных.
Приведите после этого поворотную систему в исходное состояние.
Установите собранную систему на танковом корпусе.
Проделайте в корпусе еще три отверстия, два из которых необходимы для проложения проводов двигателя, а третье, более широкое в диаметре, – для расположенной в управлении драйвера двигателя шины.
Пришла очередь пистолета, предназначенного для дула танка. Отпилите его нижнюю часть.
На сервоприводе и пистолетном корпусе проделайте по одному отверстию. Используя винт, соедините пистолет с сервоприводом.
На курке пистолета и насадке сервопривода также просверлите отверстия. Посредством отрезка проволоки соедините между собой указанные выше элементы.
Дл последующей установки дула танка на его поворотную систему проделайте два сквозных отверстия в верхней ее части. Учтите необходимость их прохождения сквозь дуло пистолета.
Осуществите программирование имеющейся у вас платы Arduino Nano.
Следуя приведенной ниже схеме, произведите сборку оставшихся компонентов устройства.
На верхней части готового шасси установите фрагменты линейки – будущие крылья танка.
Установите на них предназначенные для аккумуляторов отсеки.
С помощью термоклея присоедините лазер к дулу.
Радиоуправляемый танк готов к эксплуатации.
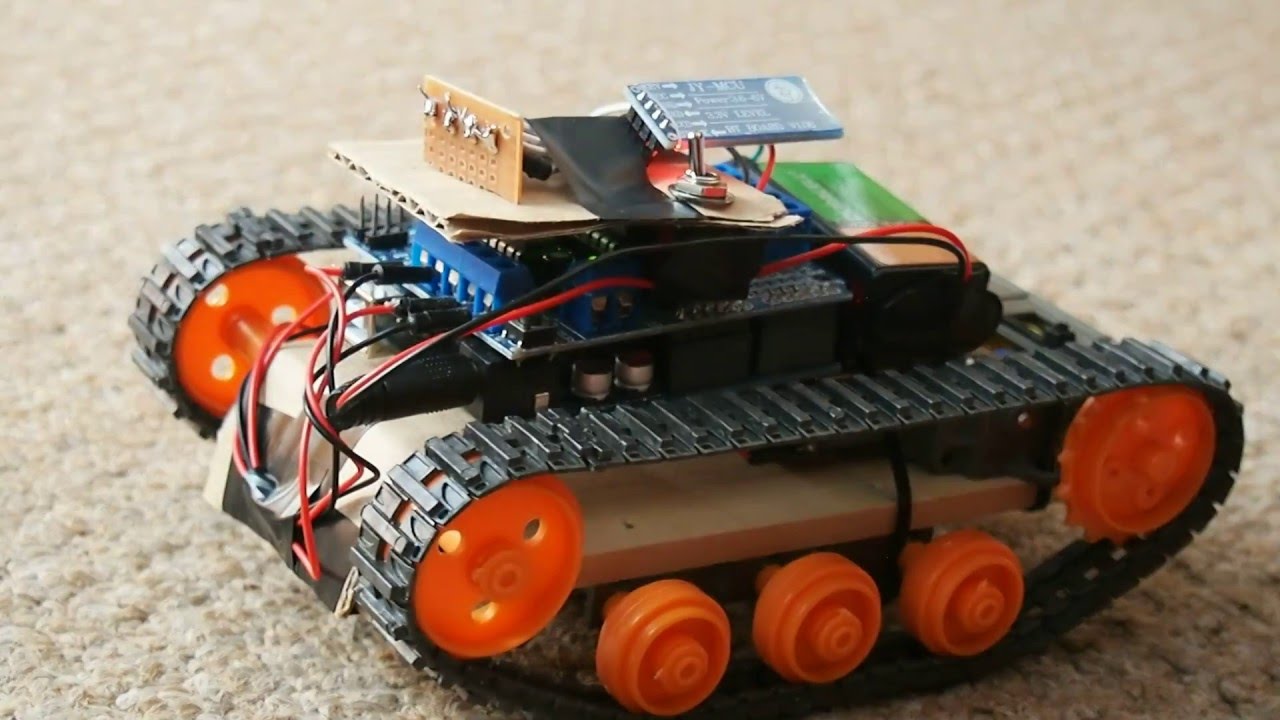
Самодельный танк на радиоуправлении с видом от первого лица, работающий на расстоянии до 2 км!
Давайте соберём танк на радиоуправлении с видом от первого лица, которым можно управлять на расстоянии до 2 километров! Мой проект разрабатывался на основе вездехода с пультом управления, его легко собрать, легко запрограммировать и это отличный проект для любителей!
Бот очень быстр и проворен, не говоря уже о том, что он несёт в себе два мощных двигателя! Он, безусловно, обгонит человека, вне зависимости от того, на какой поверхности проводятся гонки!
Бот до сих пор является прототипом, даже после того, как на его разработку были потрачены месяцы.
Итак, что же такое FPV?
FPV, или First Person View — это Вид от Первого Лица. Обычно мы видим FPV во время игры за приставками и компьютером, например в гонки.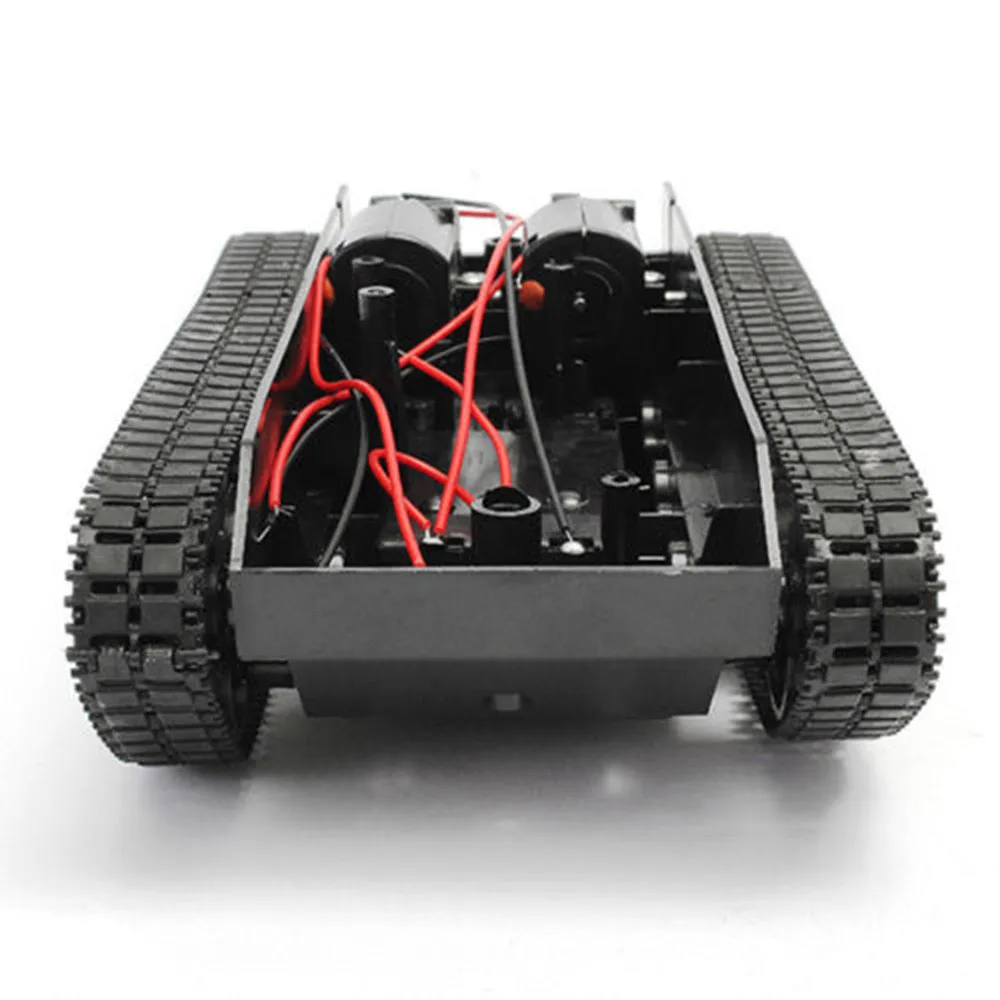 Также FPV используется военными для слежки, защиты или для контроля за защищенными зонами. Любители используют FPV в квадрокоптерах для воздушных съемок и просто ради веселья. Всё это звучит настолько же здорово, насколько дорого стоит сборка квадрокоптера, поэтому мы решили построить что-то меньшее по размеру, что ездит по земле.
Также FPV используется военными для слежки, защиты или для контроля за защищенными зонами. Любители используют FPV в квадрокоптерах для воздушных съемок и просто ради веселья. Всё это звучит настолько же здорово, насколько дорого стоит сборка квадрокоптера, поэтому мы решили построить что-то меньшее по размеру, что ездит по земле.
Как этим управлять?
Бот базируется на плате Ардуино. Так как Ардуино поддерживает большое разнообразие надстроек и модулей (RC/ WiFi/ Bluetooth), то можно выбрать любой из типов связи. Для данной сборки мы будем использовать особые компоненты, которые позволят осуществлять управление на больших расстояниях, используя 2.4Ghz передатчик и ресивер, управляющий ботом.
В последнем шаге есть демонстрационное видео.
Шаг 1: Инструмент и материалы
Большинство запчастей я покупаю в местных магазинах для хобби, остальное нахожу онлайн — просто ищите предложения с лучшей ценой. Я использую много решений от Tamiya и моя инструкция написана с учётом этой особенности.
Запчасти и материалы я покупал в Gearbest — на тот момент у них была распродажа.
Нам понадобятся:
- клон Ардуино УНО R3
- Плата Pololu Dual VNH5019 Motor Shield (2x30A)
- Пины-папы
- 4 распорки
- Винты и гайки
- Модуль передачи сигнала (трансмиттер) 2.4 Ghz — читайте подробнее в шаге 13
- Ресивер 2.4 Ghz минимум на два канала
- 2 моторчика Tamiya Plasma Dash / Hyper dash 3
- Набор коробки передач Tamiya Twin Motor Gearbox (стоковые моторчики в комплекте)
- 2 универсальных платы Tamiya
- набор гусениц и колес Tamiya
- 3 литий-полимерных батарейки 1500mAh
- камера с видом от первого лица с поддержкой удалённого управления направлением и зумом
- трансмиттер и ресивер данных для FPV 5.8Ghz 200mW
- Бутылка суперклея
- Горячий клей
Инструмент:
- Мультитул
- Набор отвёрток
- Дремель
Шаг 2: Сборка парной коробки передач
Время для распаковки коробки передач. Просто следуйте инструкции, и всё будет в порядке.
Просто следуйте инструкции, и всё будет в порядке.
Важная заметка: используйте соотношение шестеренок 58:1!!!
Советы:
- смазывайте шестерёнки перед сборкой коробки, а не после
- не забудьте о металлических спейсерах, иначе коробка будет скрипеть
- используйте формат шестеренок 58:1, он быстрее, чем 204:1
Шаг 3: Улучшаем моторчики
Коробка передач поставляется с моторчиками, но, по моему мнению, они очень медленные. Поэтому я решил использовать в проекте моторчики Hyper dash, вместо Plasma Dash, которые потребляют больше энергии.
Тем не менее, моторчики Plasma Dash являются самыми быстрыми в серии моторчиков Tamiya’s 4WD. Моторчики стоят дорого, но вы получите лучший продукт за эти деньги. Эти моторчики с углеродным покрытием вращаются с частотой 29000 оборотов в минуту на 3V и 36000 оборотов в минуту на 7V.
Моторчики рассчитаны на работу с источниками питания на 3V и увеличение напряжения, хотя и повышает производительность, но снижает их срок службы.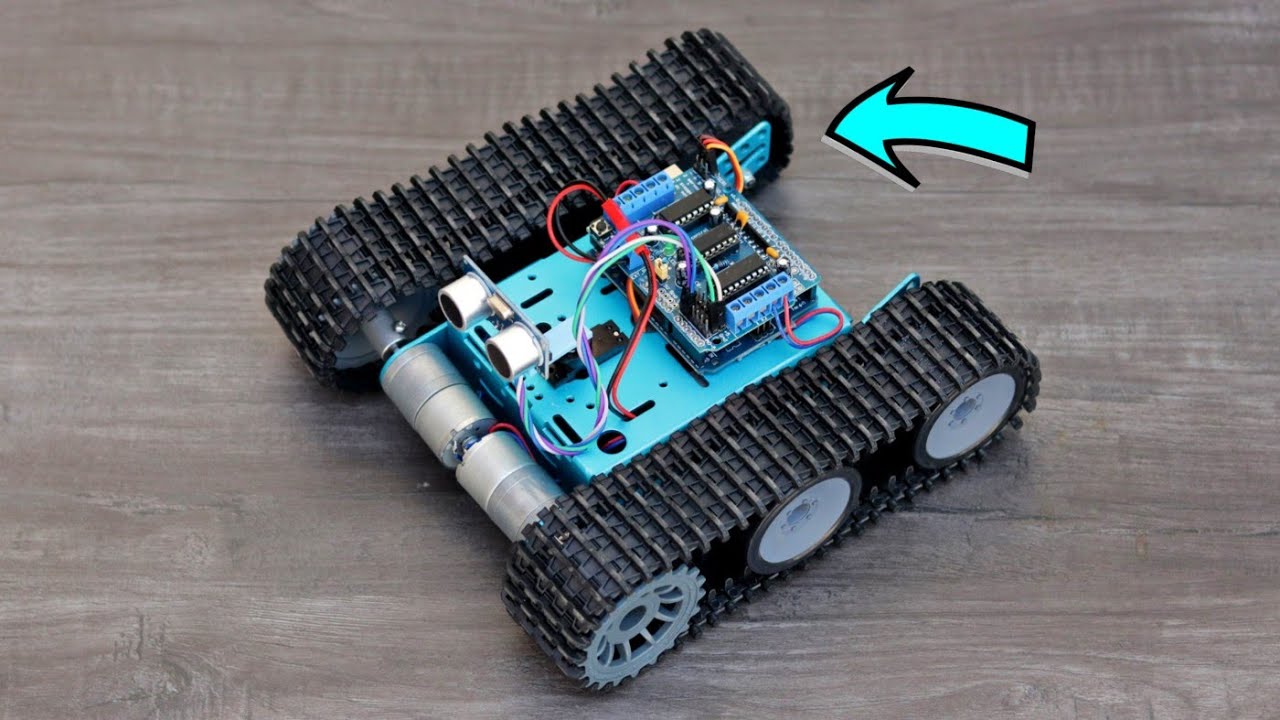 С драйвером Pololu 2×30 Motor Driver и двумя литий-полимерными батарейками, программа в Ардуино должна быть настроена на максимальную скорость 320/400, вскоре в шаге с кодом вы выясните что это значит.
С драйвером Pololu 2×30 Motor Driver и двумя литий-полимерными батарейками, программа в Ардуино должна быть настроена на максимальную скорость 320/400, вскоре в шаге с кодом вы выясните что это значит.
Шаг 4: Драйверы моторчиков
Я очень долго увлекаюсь робототехникой и могу сказать. что лучшим драйвером двигателей является Pololu Dual VNH5019. Если дело касается мощности и эффективности, то это лучший вариант, но когда мы говорим о цене — он явно не наш друг.
Другим вариантом будет собрать драйвер L298. 1 L298 рассчитан на один моторчик, что является лучшим решение для моторчиков для высокой силы тока. Я покажу вам, как собрать свою версию такого драйвера.
Шаг 5: Сборка гусениц
Включите воображение и сконфигурируйте гусеницы по своему вкусу.
Шаг 6: Прикрутите распорки и прикрепите FPV
Опять же, подключите ваше воображение и придумайте как расположить распорки и камеру для вида от первого лица. Закрепите всё при помощи горячего клея. Прикрепите верхнюю палубу и просверлите дырки для крепления антенны FPV и под установленные распорки, после этого закрепите всё на винты.
Шаг 7: Верхняя палуба
Целью создания верхней палубы было увеличение свободного места, так как компоненты FPV занимают очень много пространства в нижней части дрона, не оставляя места для Ардуино и драйвера моторчиков.
Шаг 8: Установите Ардуино и драйвер моторчиков
Просто прикрутите или приклейте Ардуино на свое место на верхней палубе, а затем пристыкуйте поверх него драйвер моторчиков.
Шаг 9: Устанавливаем модуль ресивера
Пришло время соединить модуль Rx с Ардуино. Используя каналы 1 и 2, соедините канал 1 с А0, а 2 с А1. Подключите ресивер к пинам 5V и GND на Ардуино.
Шаг 10: Соедините моторчики и батарейки
Припаяйте провода к моторчику и соедините их с драйвером соответственно каналам. Касаемо батарейки, вам нужно будет создать свой коннектор, используя штекер JST-папу и штекеры дины-папы. Посмотрите фотографии, чтобы лучше понять, что от вас потребуется.
Шаг 11: Батарейка
Возьмите батарейку и определите место, на которое вы её установите.
Как только вы подберёте для нее место, создайте адаптер-папу для подключения к батарейке. Батарейка 3S 12V Li-po будет питать камеру FPV, моторчик и Ардуино, так что вам нужно будет создать коннектор для линии питания моторчиков и линии FPV.
Шаг 12: Код для Ардуино (C++)
Код очень прост, просто загрузите его и всё должно заработать с драйвером моторчиков VNH (удостоверьтесь, что скачали библиотеку драйвера и положили её в папку библиотек Ардуино).
Код схож с Zumobot RC, я просто заменил библиотеку драйвера моторчиков и настроил кое-какие штуки.
Для драйвера L298 используйте стандартную программу Zumobot, только соедините всё согласно тому, как написано в библиотеке.
#define PWM_L 10 ///левый мотор
#define PWM_R 9
#define DIR_L 8 ///левый мотор
#define DIR_R 7
Просто загрузите код и приступайте к следующему шагу.
Файлы- RCControl.rar
- DualVNH5019MotorShield.rar
Шаг 13: Контроллер
На рынке есть разные типы контроллеров для радиоуправляемых игрушек: для воды, земли, воздуха. Они также работают на различных частотах: AM, FM, 2.4GHz, но, в конце концов, все они остаются обычными контроллерами. Я точно не знаю название контроллера, но знаю, что он используется для воздушных дронов и имеет больше каналов по сравнению с наземным или водным.
Они также работают на различных частотах: AM, FM, 2.4GHz, но, в конце концов, все они остаются обычными контроллерами. Я точно не знаю название контроллера, но знаю, что он используется для воздушных дронов и имеет больше каналов по сравнению с наземным или водным.
На данный момент я использую Turnigy 9XR Transmitter Mode 2 (No Module). Как вы видите, в названии говорится, что он безмодульный, это означает, что вы сами выбираете, какой модуль связи 2.4GHz в него встроить. На рынке есть дюжины брендов, у которых есть свои особенности использования, управления, расстояния и другие разные фишки. Сейчас я использую FrSky DJT 2.4Ghz Combo Pack for JR w/ Telemetry Module & V8FR-II RX, который стоит дороговато, но просто посмотрите на его спецификацию и плюшки, тогда цена покажется не такой уж и большой за всё это добро. Плюс модуль идёт сразу с ресивером!
И помните, что даже если у вас будет контроллер и модули, вы не сможете включить его, пока не обзаведётесь батарейками, подходящими к контроллеру. В любом случае, найдите контроллер, который вам подходит, и тогда вы определитесь с подходящими батарейками.
В любом случае, найдите контроллер, который вам подходит, и тогда вы определитесь с подходящими батарейками.
Совет: если вы новичок, то обратитесь за помощью в местные хобби-магазины или найдите группы энтузиастов-радиолюбителей, потому что этот шаг — не просто шутка и вам нужно будет выложить существенную сумму денег.
Шаг 14: Проверка
Сначала включите бота, затем включите модуль передатчика, после этого модуль приёмника должен показать успешную привязку, мигая светодиодом.
Гид для новичков по FPV
Часть, установленная на боте называется FPV-передатчиком и камерой, а то, что у вас в руках, называется FPV-приёмником. Приёмник соединяется с любым экраном — будь то LCD, TV, TFT и т.д. Всё, что нужно сделать, так это вставить в него батарейки или подключить к источнику питания. Включите его, затем при необходимости поменяйте канал на приёмнике. После этого вы должны увидеть на экране то, что видит ваш бот.
Дальность сигнала FPV
В проекте использовался недорогой модуль, способный работать на расстоянии до 1. 5 — 2 км, но это относится к использованию девайса на открытом пространстве, если вы хотите получить сигнал большей силы, то купите передатчик большей мощности, например 1000mW. Примите на заметку, что мой передатчик имеет мощность всего в 200mW и он был самым дешевым, который я смог найти.
5 — 2 км, но это относится к использованию девайса на открытом пространстве, если вы хотите получить сигнал большей силы, то купите передатчик большей мощности, например 1000mW. Примите на заметку, что мой передатчик имеет мощность всего в 200mW и он был самым дешевым, который я смог найти.
Улучшение антенны
Замены антенны на антенну типа клевер увеличит дальность и силу сигнала
Шаг 15: Почти готово!
Остался лишь последний шаг — получить удовольствие от управления вашим новым танком-шпионом с камерой!
Портфолио Натана Ли — модульный танк Arduino
Будучи страстным поклонником истории и инноваций, мне нравилось узнавать о разработке танков во время мировых войн. Меня завораживает сложная комбинация подвижных частей танка, и мне захотелось конкретно узнать, как система зубчатых колес и гусениц устроена для плавного движения. Что может быть лучше, чем учиться на практике?
Что может быть лучше, чем учиться на практике?
Цели:
Прежде чем приступить к каким-либо крупным исследованиям или разработкам для решения моей задачи по дизайну, я хотел поставить перед собой четкие цели. Это было особенно важно, потому что у меня были большие планы, и я знал, что развитие моего проекта будет состоять из нескольких этапов.
Создать пользовательское приложение для управления движением танков через Bluetooth
Создать пользовательскую печатную плату для танка вместо использования макетных плат
Дизайн a Модульная система резервуаров , позволяющая использовать взаимозаменяемые вершины , в том числе:
Ранняя разработка базы для модульного навесного оборудования
Шестерни и гусеницы
Поставив перед собой цели, я начал исследовать шестерни и гусеницы. Поскольку мне нужно было использовать шестерни нестандартного размера, я использовал свои навыки геометрии для расчета правильного расстояния между звеньями гусеницы и количества зубьев шестерни. После того, как я распечатал и заработала простая цепь, я добавил к своей конструкции цепи, чтобы создать более широкие гусеницы танка с текстурой для сцепления. В итоге мне понадобилось по 27 звеньев на каждую сторону танка.
Поскольку мне нужно было использовать шестерни нестандартного размера, я использовал свои навыки геометрии для расчета правильного расстояния между звеньями гусеницы и количества зубьев шестерни. После того, как я распечатал и заработала простая цепь, я добавил к своей конструкции цепи, чтобы создать более широкие гусеницы танка с текстурой для сцепления. В итоге мне понадобилось по 27 звеньев на каждую сторону танка.
Деревянное крепление для проверки правильного расстояния между шестернями
Нижняя часть шасси
Когда гусеницы готовы, я начал проектировать базовое шасси для размещения двигателей и электроники. Мой первоначальный проект был проще, потому что я планировал просто приклеить двигатели на место. Однако я быстро понял, что это помешает мне когда-либо отрегулировать натяжение гусеницы, поэтому я сделал вторую версию с регулируемыми опорами двигателя.
Верхнее шасси Шермана
Когда я был удовлетворен нижней частью шасси, я начал проектировать верхнюю часть Sherman, опираясь на чертежи времен Второй мировой войны.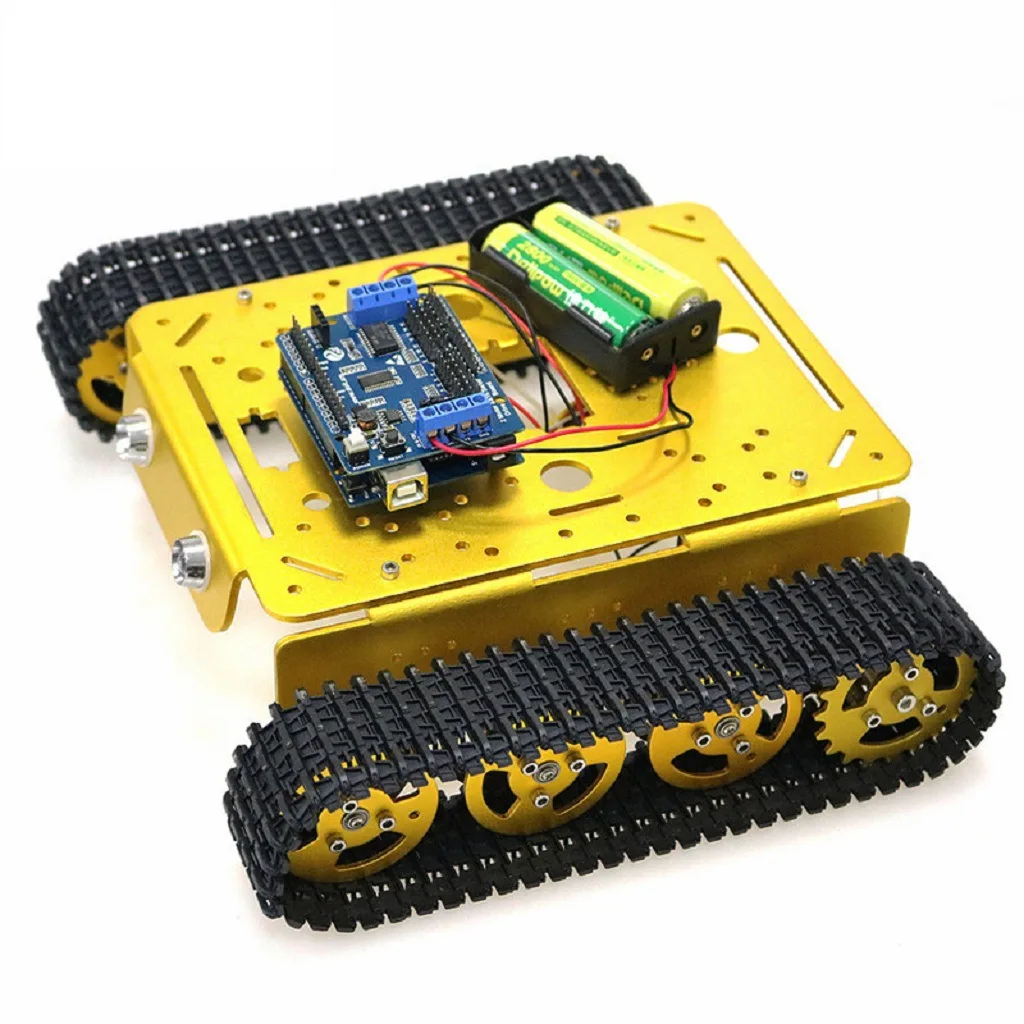 Первый был относительно простым, с сервоприводом для управления башней. Однако моя первая итерация турельной установки была плохо спроектирована, поэтому я создал новую версию с прямым креплением к сервоприводу. Я добавил светодиоды и переключатель тоже.
Первый был относительно простым, с сервоприводом для управления башней. Однако моя первая итерация турельной установки была плохо спроектирована, поэтому я создал новую версию с прямым креплением к сервоприводу. Я добавил светодиоды и переключатель тоже.
Humble Beginnings
Закончив с механическими компонентами, я решил перейти к изготовлению студентов-электриков. Для создания прототипа я начал с сборки макетной платы с L29.3D-контроллер двигателя и Bluetooth-модуль HC05.
Fritzing
Когда я был уверен, что моя схема будет работать, я решил бросить себе вызов. Я хотел оба научиться проектировать схемы в Fritzing. Это может быть не самое красивое, но, безусловно, помогло мне спланировать точное расположение компонентов и проводов, чтобы было меньше ошибок при пайке печатной платы.
Пайка печатной платы
Нижняя часть основной платы
Верхняя часть основной цепи платы и Arduino UNO
Добавление конденсатора байпаса питания для Arduino
Вторичная плата для сервопривода шасси Sherman и светодиодов
9 0033 Все подключено! Это все еще немного грязно, но это, безусловно, более безопасно, чем если бы я просто использовал кучу макетов.
Безопасность превыше всего! Паяльные пары опасны. Носите маску и хорошо проветривайте помещение.
Программирование пользовательского приложения
Ура, прототип шасси танка и припаянная печатная плата готовы! Однако, как я могу проверить, что они работают? Очевидно, мне нужен способ управления танком. Именно в этот момент я начал пытаться научиться создавать собственное приложение. Поскольку я был новичком в разработке приложений, я воспользовался преимуществами программного обеспечения MIT App Inventor, чтобы научиться программировать приложения.
Дизайн пользовательского интерфейса моего джойстика
Пример программы моего приложения
Во-первых, джойстик и Bluetooth-связь
Когда я начал использовать MIT App Inventor, я подумал, что было бы здорово, если бы я мог разработать цифровой джойстик для переменного управления скоростью и направлением танка. Я сделал это, используя различные функции пользовательского интерфейса программного обеспечения для программирования приложений. Что касается программирования, приложение обновляло «состояние» резервуара всякий раз, когда через джойстик отправлялись входные данные.
Я сделал это, используя различные функции пользовательского интерфейса программного обеспечения для программирования приложений. Что касается программирования, приложение обновляло «состояние» резервуара всякий раз, когда через джойстик отправлялись входные данные.
Затем я добавил в приложение функцию Bluetooth. Это позволило мне отправить «состояние» джойстика на модуль Bluetooth контура бака. Затем Arduino смог прочитать эти состояния и отправить соответствующие команды двигателям.
Часть моего кода Arduino, которая взаимодействует напрямую с приложением Bluetooth
Он жив! Теперь, когда Bluetooth-соединение работает и танк успешно отвечает на команды приложения, я могу перейти к завершению этого этапа сборки модуля Arduino: шасси Sherman!
Прежде чем я смогу подключиться к модулю Bluetooth (HC05), который подключен к Arduino UNO.
Гусеницы работают так плавно благодаря 6 батареям АА!
Программа Sherman Tank
Чтобы должным образом управлять всеми функциями шасси танка Sherman, мне нужно было добавить в приложение интерфейс для управления сервоприводом, прикрепленным к орудию Sherman. К сожалению, из-за 1-байтового размера соединения Bluetooth моей установки добавление управления сервоприводом означало бы, что у меня больше не будет достаточно состояний для использования управления джойстиком. Поэтому я создал второе приложение только для танка Sherman, в котором используется более простое кнопочное управление. Вместо того, чтобы изменять скорость и направление одним касанием, мне пришлось разделить движение и контроль скорости на две отдельные секции. Это позволяет мне освободить состояния для управления сервоприводом.
К сожалению, из-за 1-байтового размера соединения Bluetooth моей установки добавление управления сервоприводом означало бы, что у меня больше не будет достаточно состояний для использования управления джойстиком. Поэтому я создал второе приложение только для танка Sherman, в котором используется более простое кнопочное управление. Вместо того, чтобы изменять скорость и направление одним касанием, мне пришлось разделить движение и контроль скорости на две отдельные секции. Это позволяет мне освободить состояния для управления сервоприводом.
Когда приложение и программирование Arduino завершено, все, что осталось сделать, это прикрепить шасси Sherman и начать движение!
The Grand Finale
Sherman Tank Demo.MP4Дополнительные кадры
FPV Sherman Tank Demo.mp4Дополнительные кадры 900 03
В конце концов, это был очень поучительный и успешный первый этап мой модульный проект Arduino tank (M.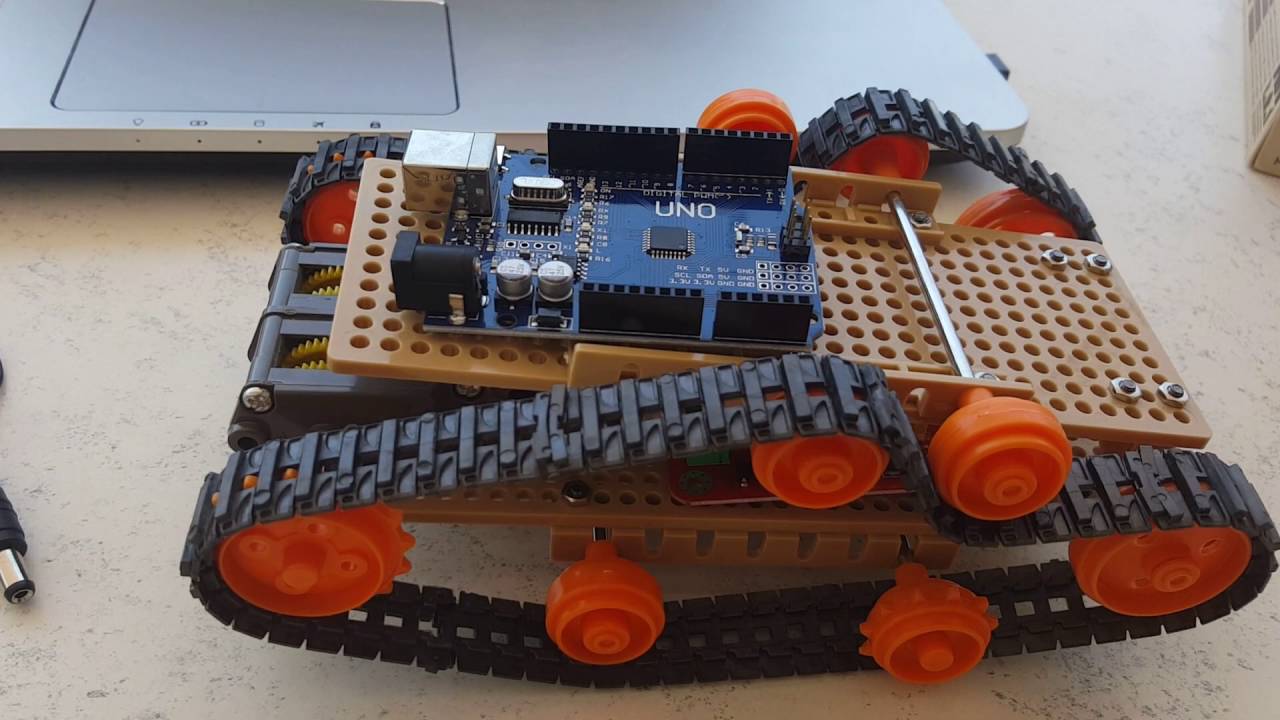 A.T). Я научился проектировать гусеницы для танков, паять схемы, как работают обходные конденсаторы и как программировать собственное приложение. Мне не терпится использовать эти знания на следующем этапе проектирования: 6-осевой робот-манипулятор. А пока весь код, который я создал и использовал, можно найти здесь, на моем GitHub.
A.T). Я научился проектировать гусеницы для танков, паять схемы, как работают обходные конденсаторы и как программировать собственное приложение. Мне не терпится использовать эти знания на следующем этапе проектирования: 6-осевой робот-манипулятор. А пока весь код, который я создал и использовал, можно найти здесь, на моем GitHub.
Следующий проект: 6-Axis Arm Tank
Предыдущий проект: ML, NLP и Airline Sentiments
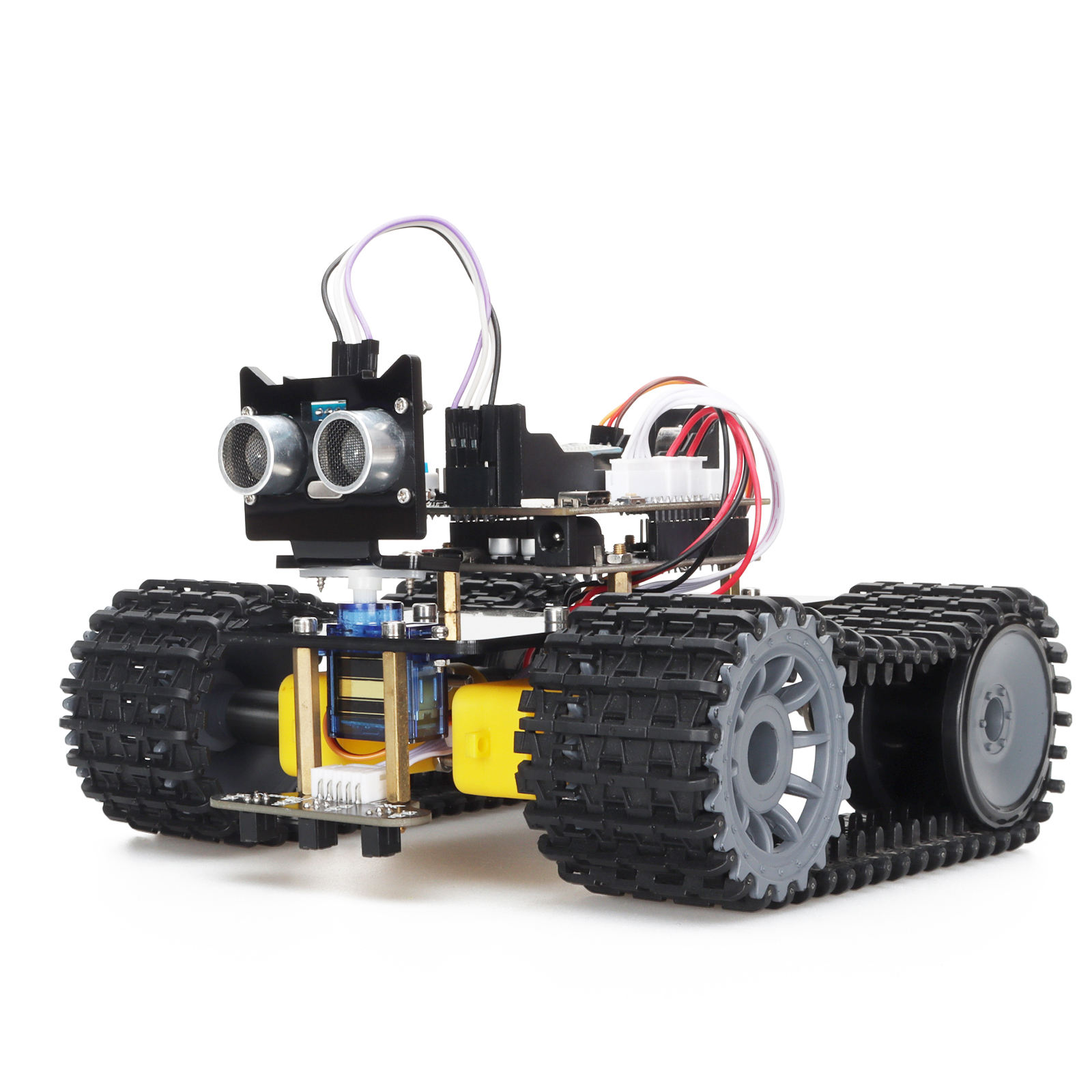
Совместимость с XiaoR GEEK GFS Arduino Mega 2560 Smart Robot coding Tank/Ca
Наведите курсор на изображение, чтобы увеличить Нажмите на изображение, чтобы увеличитьСэкономьте $-329,00
XiaoR GEEK
Нет отзывов
ВЫБЕРИТЕ ВЕРСИИ: Стандартная версия WiFiСтандартная версия Wi-Fi
Версия датчика WiFi
Стандартная версия Wi-Fi+Bluetooth
Версия датчика WiFi+Bluetooth
Variant Стандартная версия WiFi — 329,00 долл. США Версия с датчиком WiFi — 349,00 долл. США Версия с датчиком WiFi+Bluetooth — 339,00 долл. США Версия с датчиком Wi-Fi + Bluetooth — 359,00 долл. США
США Версия с датчиком WiFi — 349,00 долл. США Версия с датчиком WiFi+Bluetooth — 339,00 долл. США Версия с датчиком Wi-Fi + Bluetooth — 359,00 долл. США
Язык программирования: Python
Особенности:1. Автоматическая самостоятельная точка доступа Wi-Fi после включения питания и поддержка компьютерных веб-браузеров, приложений для смартфонов и планшетов (IOS/Android), ПК для управления автомобилем-роботом и просмотра видео в реальном времени с HD-камеры на экране. .
2. Поддержите программное обеспечение для графического программирования с помощью перетаскивания, просто подключите и играйте, получайте то, что видите, легко для учащихся роботов Arduino.
3. Роботизированный манипулятор с 4 степенями свободы и поворотно-наклонная камера с 2 степенями свободы обеспечивают достаточную свободу управления.
4. Внешняя WiFi-антенна 5DBi обеспечивает высокую интенсивность сигнала и большую дальность передачи, более быструю и устойчивую, что позволяет работать в режиме реального времени.

5. Многоскоростная система управления для контроля скорости робота.
6. Принять высококачественный мощный двигатель 12 В 350 об / мин, максимальная нагрузка до 8 кг, что обеспечивает постоянную мощность для робота.
7. HD-камера Две степени свободы управления Cloud Terrace, динамическое разрешение видео до 640*480p, частота кадров до 30 кадров/с. Вы можете делать фотографии (на телефон) и записывать видео (на компьютер).
8. Полный исходный код предоставляется для вторичной разработки.
9. Предоставьте подробные руководства по установке и полный исходный код для вторичной разработки. Если у вас есть какие-либо вопросы, свяжитесь с нами, и у вас будет профессиональная техническая команда, которая поможет вам. ([email protected])
В некоторые страны аккумуляторы не доставляются. Мы доставим корпус батареи заказчику. Аккумулятор нужно купить в местном магазине.
Внимание: Версия датчика с ультразвуковым и инфракрасным датчиком для обхода препятствий, линейного патрулирования.