Как правильно подключить драйвер двигателя TB6612FNG. Каковы основные технические характеристики этого двухканального контроллера коллекторных моторов. Какие преимущества дает использование TB6612FNG по сравнению с L298N. Какие есть особенности и ограничения при работе с этим драйвером.
Что такое драйвер двигателя TB6612FNG и для чего он нужен
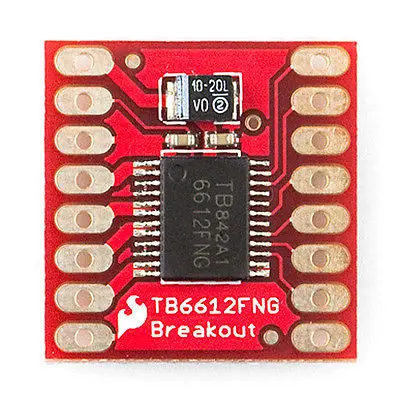
TB6612FNG — это двухканальный драйвер для управления коллекторными двигателями постоянного тока. Он представляет собой микросхему, которая позволяет подключать и контролировать работу двух независимых моторов или одного шагового двигателя.
Основные функции драйвера TB6612FNG:
- Управление направлением вращения двигателей
- Регулировка скорости вращения с помощью ШИМ
- Обеспечение необходимого тока для питания моторов
- Защита от перегрузки и перегрева
Драйвер TB6612FNG часто используется в робототехнике, автоматизации, управлении различными механизмами и устройствами. Он позволяет подключать моторы к микроконтроллерам и управлять ими с помощью простых логических сигналов.
Основные технические характеристики TB6612FNG
Рассмотрим ключевые параметры и возможности драйвера TB6612FNG:
- Напряжение питания: 2.5-13.5В
- Максимальный продолжительный ток: 1.2А на канал
- Пиковый ток: 3.2А (кратковременно)
- Два независимых канала управления
- ШИМ-управление скоростью до 100 кГц
- Встроенная защита от перегрева и перегрузки
- Режим энергосбережения (standby)
- Корпус SSOP24 или QFN24
Таким образом, TB6612FNG обеспечивает достаточную мощность для большинства компактных моторов, имеет широкий диапазон питающих напряжений и удобные функции управления.
Преимущества TB6612FNG по сравнению с L298N
Драйвер TB6612FNG имеет ряд преимуществ по сравнению с популярным L298N:
- Меньшие размеры и вес
- Более высокий КПД (до 95% против 25% у L298N)
- Меньшее падение напряжения (0.2-0.5В против 1.8-2В)
- Встроенная защита от перегрева
- Более высокая частота ШИМ (100 кГц против 25 кГц)
- Меньшее энергопотребление
Благодаря этим особенностям TB6612FNG позволяет создавать более компактные, энергоэффективные и надежные устройства по сравнению с L298N. При этом он обеспечивает схожие функциональные возможности.
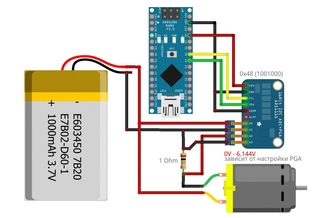
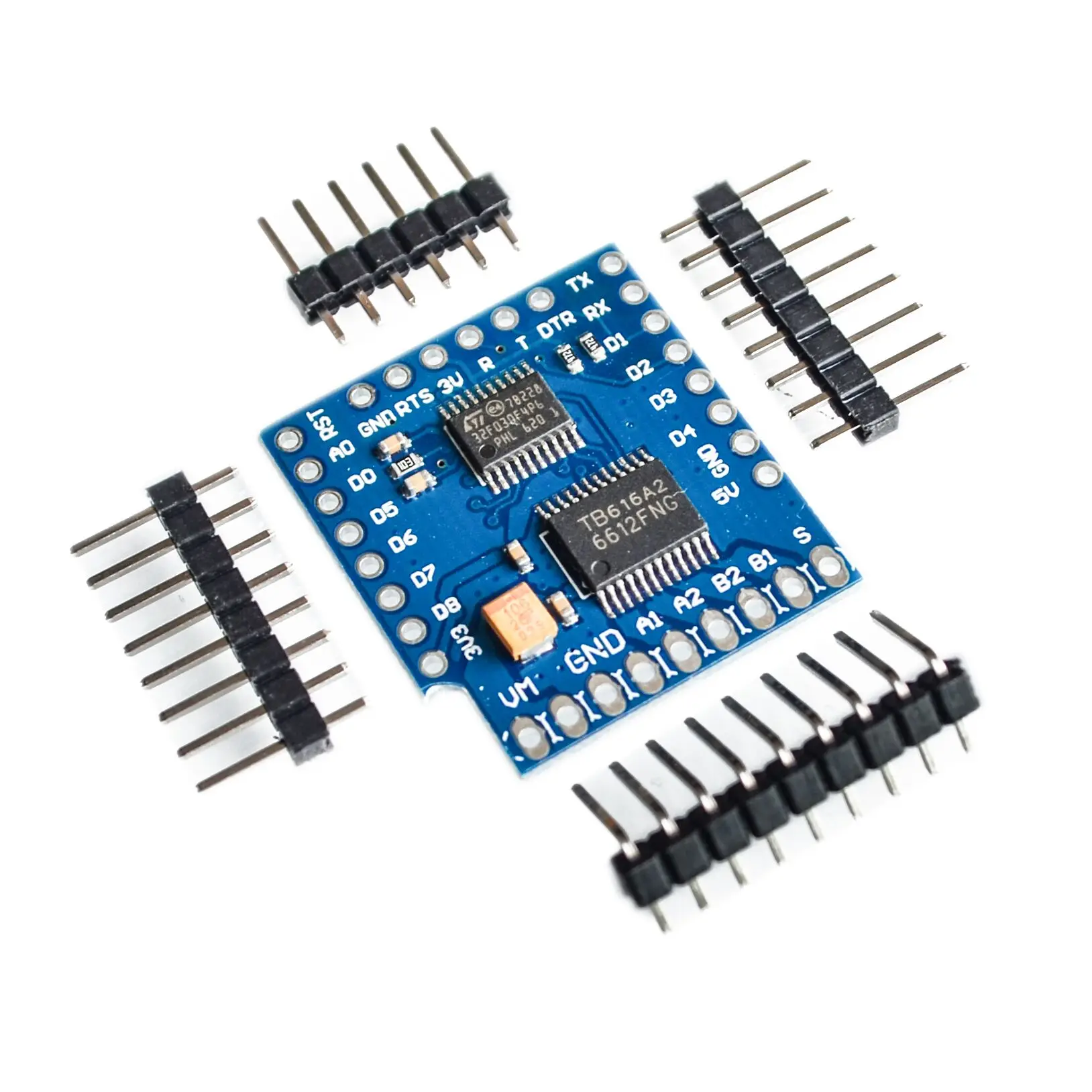
Схема подключения драйвера TB6612FNG
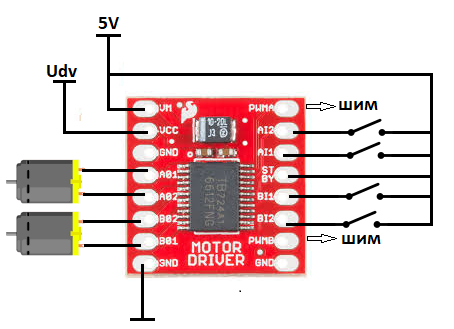
Для правильного подключения TB6612FNG необходимо учитывать назначение его выводов:
- VM — питание моторов (2.5-13.5В)
- VCC — питание логики (2.7-5.5В)
- GND — общий провод
- STBY — режим ожидания (активный низкий уровень)
- AIN1, AIN2, BIN1, BIN2 — входы управления направлением
- PWMA, PWMB — ШИМ-входы управления скоростью
- A01, A02, B01, B02 — выходы для подключения моторов
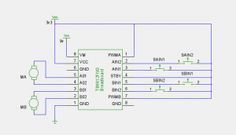
Типовая схема подключения выглядит следующим образом:
- VM и VCC подключаются к соответствующим источникам питания
- GND соединяется с общим проводом
- STBY подтягивается к VCC через резистор 10 кОм
- AIN1, AIN2, BIN1, BIN2 подключаются к цифровым выходам микроконтроллера
- PWMA и PWMB — к ШИМ-выходам микроконтроллера
- A01, A02 и B01, B02 — к выводам моторов
Особенности программирования TB6612FNG
При написании программы для управления моторами через TB6612FNG следует учитывать несколько важных моментов:
- Для включения мотора необходимо установить STBY в высокий уровень
- Направление вращения задается комбинацией сигналов на входах AIN1/AIN2 и BIN1/BIN2
- Скорость регулируется ШИМ-сигналом на входах PWMA и PWMB
- Для остановки мотора можно использовать режим торможения или холостого хода
Пример кода для Arduino, управляющего одним мотором через TB6612FNG:
#define STBY 10
#define PWMA 11
#define AIN1 12
#define AIN2 13
void setup() {
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
void loop() {
// Включаем драйвер
digitalWrite(STBY, HIGH);
// Вращение вперед
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 200);
delay(2000);
// Остановка
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
delay(1000);
}
Ограничения и особенности работы с TB6612FNG
При использовании драйвера TB6612FNG следует учитывать некоторые ограничения:
- Максимальный продолжительный ток 1.2А на канал не должен превышаться
- Пиковый ток 3.2А допустим только кратковременно
- Необходимо обеспечить хороший теплоотвод при работе на максимальной мощности
- Рекомендуется использовать развязывающие конденсаторы на входах питания
- При работе с индуктивной нагрузкой (моторы) нужны защитные диоды
Соблюдение этих рекомендаций позволит обеспечить надежную и долговременную работу устройств на базе TB6612FNG.
Применение TB6612FNG в робототехнике
Драйвер TB6612FNG широко используется в различных робототехнических проектах благодаря своим преимуществам:
- Управление моторами мобильных роботов
- Приводы манипуляторов и захватов
- Системы позиционирования и наведения
- Автоматизированные конвейеры и механизмы
- Мехатронные устройства
Компактность и эффективность TB6612FNG позволяют создавать легкие и энергоэкономичные мобильные устройства с автономным питанием. А возможность точного управления скоростью и направлением вращения обеспечивает высокую функциональность роботов.
Сравнение TB6612FNG с другими популярными драйверами двигателей
Рассмотрим, как TB6612FNG соотносится с некоторыми другими распространенными драйверами моторов:
| Параметр | TB6612FNG | L298N | DRV8833 |
|---|---|---|---|
| Каналы | 2 | 2 | 2 |
| Макс. ток | 1.2А | 2А | 1.5А |
| Напряжение | 2.5-13.5В | 5-35В | 2.7-10.8В |
| КПД | 95% | 25% | 90% |
Как видно, TB6612FNG занимает промежуточное положение между более мощным, но менее эффективным L298N и компактным низковольтным DRV8833. Это делает его оптимальным выбором для широкого круга задач.
Драйвер TB6612FNG | AlexGyver Community
VictorArx
★★✩✩✩✩✩
- #1
Здравствуйте дорогие форумчане! Только зарегистрировался и ещё не очень знаю порядки на форуме, прошу сильно не пинать. Вопрос такой. Как соединить два драйвера
TB6612FNG, чтобы увеличить силу тока на моторы. С уважением .
bort707
★★★★★★✩
- #2
VictorArx написал(а):
соединить два драйвера
Нажмите для раскрытия.
..
 ..
..зачем два? один будет усиливать другой, чтоли?
Эдуард Анисимов
★★★★★★✩
- #3
По моему никак.
Только собрать аналог на рассыпухе. На мощных транзисторах.
VictorArx
★★✩✩✩✩✩
- #4
PiratFox написал(а):
Опять люди прогуливали школьные уроки физики, где про закон Ома рассказывали.
Печально, господа — товарищи…
Нажмите для раскрытия…
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А. Это я прочитал в характеристиках. Дать ссылку?
Эдуард Анисимов
★★★★★★✩
- #5
Дайте. Интересно.
VictorArx
★★✩✩✩✩✩
- #6
Эдуард Анисимов написал(а):
Дайте.
Интересно. Нажмите для раскрытия…
Надеюсь никого не обидел. Счас нарисую. http://know.smartelements.ru/main:motors:tb6612
xof
★✩✩✩✩✩✩
- #7
VictorArx написал(а):
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А. Это я прочитал в характеристиках. Дать ссылку?
Нажмите для раскрытия…
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1. 2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Даташит производителя не упоминает про объединение драйверов или каналов.
Да и зачем вообще эти извращения ? Почему не взять более подходящий драйвер сразу ?
VictorArx
★★✩✩✩✩✩
- #8
Избыточное цитирование
xof написал(а):
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.
2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Даташит производителя не упоминает про объединение драйверов или каналов.
Да и зачем вообще эти извращения ? Почему не взять более подходящий драйвер сразу ?
Нажмите для раскрытия…
Можете посоветовать мощнее? Габариты не должны быть большими, не влезут в модель.
Эдуард Анисимов
★★★★★★✩
- #9
@VictorArx, Там об этом ни слова. По крайней мере я не нашёл.
По крайней мере я не нашёл.
VictorArx
★★✩✩✩✩✩
- #10
Эдуард Анисимов написал(а):
@VictorArx, Там об этом ни слова. По крайней мере я не нашёл.
Нажмите для раскрытия…
Описание
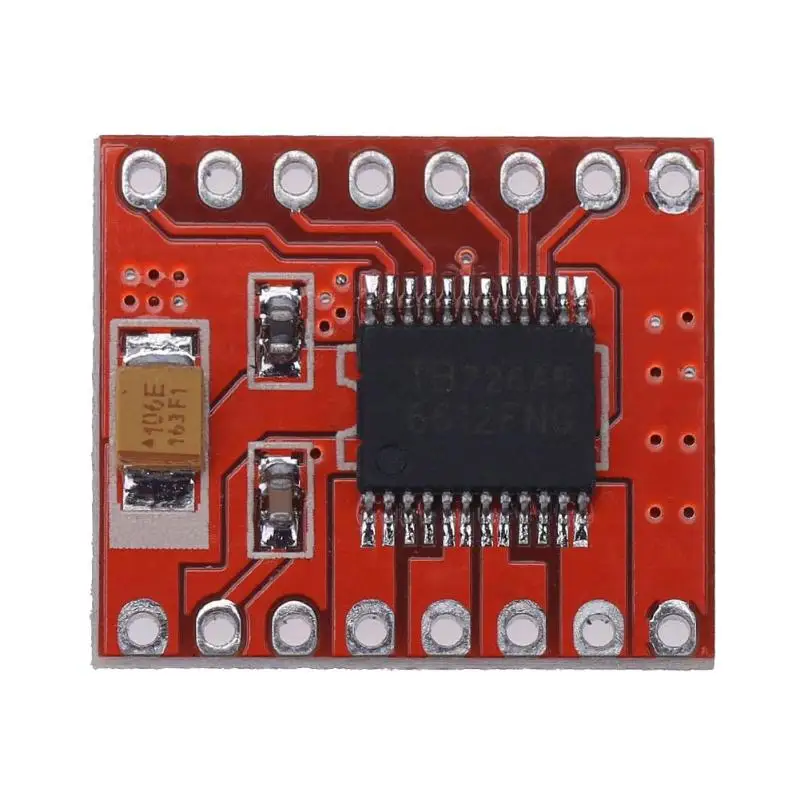
Драйвер моторов представляет из себя плату с микросхемой, позволяющей управлять моторами.
Напрямую, подключать моторы к контроллерам очень опасно, так как моторы потребляют значительно больший ток, чем может выдать контроллер. Для решения задачи разделения питания и управления моторами и существуют драйверы моторов.
Драйвер моторов на базе микросхемы TB6612 позволит управлять мощными моторами или сервоприводом. С помощью данного драйвера можно независимо управлять двумя коллекторными моторами или одним шаговым. Драйвер обладает компактными размерами и будет незаменим в управлении небольшими роботами или в компактных проектах, где использовать шилды или громоздкие драйверы затруднительно.
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А.
Микросхема имеет встроенную защиту по температуре, перенапряжению и короткому замыканию.
PiratFox
★★★★★✩✩
- #11
VictorArx написал(а):
Это я про уроки школьной физики ответил пирату.

Нажмите для раскрытия…
Да я же не злобно…
Смотрел даташит. Так Вы перепутали. Тама суммированы токи по двум каналам, а через один тот же остался. Увы и аххх…
Эдуард Анисимов
★★★★★★✩
- #12
VictorArx написал(а):
Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А.
Нажмите для раскрытия…
Так пусть схему покажут как это сделать, раз утверждают.
Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками. Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
А здесь схема и так уже мостовая. Если параллельно соединить два моста, можно получить хороший бадабум. А может и нет. Пусть схему покажут, тогда поверю.
И как писал @xof, в даташите нет упоминания про такое включение. А нет в даташите, нет в реале.
И на лифте то же много чего написано, однако он поднимается на стальном тросе.
Реакции:
NikanorVictorArx
★★✩✩✩✩✩
- #13
Избыточное цитирование
Эдуард Анисимов написал(а):
Так пусть схему покажут как это сделать, раз утверждают.

Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками. Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
А здесь схема и так уже мостовая. Если параллельно соединить два моста, можно получить хороший бадабум. А может и нет. Пусть схему покажут, тогда поверю.
И как писал @xof, в даташите нет упоминания про такое включение. А нет в даташите, нет в реале.
И на лифте то же много чего написано, однако он поднимается на стальном тросе.Нажмите для раскрытия…
Согласен с Вами. Обычно , если утверждают подобное, то приводят принципиальную схему. Буду искать более мощный драйвер. Этот понравился по причине малых габаритов и без радиатора. Алекс советовал в видео.
PiratFox
★★★★★✩✩
- #14
Эдуард Анисимов написал(а):
Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками.
Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
Нажмите для раскрытия…
Эдик, но ведь ток через один транзистор не изменится. Ты ведь Инженер, хоть ты уж не путай ток и мощность. Или что, транзисторы параллельно соединять для увеличения тока? Теоретически возможно, но на практике тот ещё цирк. Серьёзные инженеры такой вариант даже не обсуждают.
VictorArx
★★✩✩✩✩✩
- #15
VictorArx написал(а):
Согласен с Вами. Обычно , если утверждают подобное, то приводят принципиальную схему.
Буду искать более мощный драйвер. Этот понравился по причине малых габаритов и без радиатора. Алекс советовал в видео.
Нажмите для раскрытия…
Как Вам это?
Реакции:
Nikanor
Эдуард Анисимов
★★★★★★✩
- #16
PiratFox написал(а):
Эдик, но ведь ток через один транзистор не изменится.
Ты ведь Инженер, хоть ты уж не путай ток и мощность. Или что, транзисторы параллельно соединять для увеличения тока? Теоретически возможно, но на практике тот ещё цирк. Серьёзные инженеры такой вариант даже не обсуждают.
Нажмите для раскрытия…
Прочитал это и задумался. А ведь здравая мысль. Но здесь есть какое то но. Не зря же применяют такое включение. Я это знаю по обычным аккустическим усилителям. Сам усилитель — это полумост. Если на один подать прямой сигнал а на второй в противофазе, то колонку можно подключить от выхода одного к выходу второго. Получается мостовая схема. Увеличивающая выходную мощность в два раза. Но при этом меняется схема подключения. При обычном подключении нагрузка подключена относительно земли и при питании +-70 вольт, на динамике напруга меняется в этих пределах. В мостовом включении получается что на динамик подаётся +-140 вольт. Вот и увеличение выходной мощности при том же токе.
Nikanor
★★✩✩✩✩✩
- #17
VictorArx написал(а):
Как Вам это?
Нажмите для раскрытия…
такой бутер возможен . если микросхемы полностью одинаковые.
такое возможно только если они из одной партии.
а это не ведомо.
если запаралелить два канала — должно работать.
только про радиатор нужно помнить.
poty
★★★★★★✩
- #18
@VictorArx, это профанация. Подключенные двигатели без нагрузки не смогут «взять» ток в 5А, очевидно это и спасает автора такого видео от фиаско. Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель. Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель. Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
VictorArx
★★✩✩✩✩✩
- #19
poty написал(а):
@VictorArx, это профанация. Подключенные двигатели без нагрузки не смогут «взять» ток в 5А, очевидно это и спасает автора такого видео от фиаско. Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель.
Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
Нажмите для раскрытия…
Если запараллелить каналы, как сказал предыдущий товарищь, мобудь сработает? Мне надо на канал 2A.
PiratFox
★★★★★✩✩
- #20
один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель.
Дык ясно, почему не понимал. Потому, что этот человек ни разу не инженер. Более того, он ещё и школьную физику плохо знает, а вернее, не знает совсем.
Более того, он ещё и школьную физику плохо знает, а вернее, не знает совсем.
VictorArx
★★✩✩✩✩✩
- #21
Nikanor написал(а):
такой бутер возможен . если микросхемы полностью одинаковые.
такое возможно только если они из одной партии.
а это не ведомо.если запаралелить два канала — должно работать.
только про радиатор нужно помнить.
Нажмите для раскрытия…
Буду эксперементировать. Так , как я тоже не инженер, а токмо учусь, поэтому чтобы запараллелить два канала одного драйвера нужно просто соединять все одноимённые выводы с одинаковыми цифрами? Например А1 с В1 и т. д.
д.
PiratFox
★★★★★✩✩
- #22
VictorArx написал(а):
Если запараллелить каналы, как сказал предыдущий товарищь, мобудь сработает? Мне надо на канал 2A.
Нажмите для раскрытия…
не делайте такого, если Вы в здравом уме. Впрочем, если хотите ощутить запах горелой электроники — то вперёд!
Nikanor
★★✩✩✩✩✩
- #23
на L293D я такое делал.
и никакого дыма не было.
может и с этим прокатит.
драйвер не дорогой.
можно и попробовать.
ну а нет — берите более мощный.
только размеры будут намного больше.
VictorArx
★★✩✩✩✩✩
- #24
Nikanor написал(а):
на L293D я такое делал.
и никакого дыма не было.
может и с этим прокатит.
драйвер не дорогой.
можно и попробовать.
ну а нет — берите более мощный.
только размеры будут намного больше.Нажмите для раскрытия…
За драйвер я не переживаю. У меня радиоуправляемый механизм. Чтоб всю электронику, нажитую непосильным трудом не спалить.
У меня радиоуправляемый механизм. Чтоб всю электронику, нажитую непосильным трудом не спалить.
ТехнарьКто
★★★★★✩✩
- #25
VictorArx написал(а):
Буду эксперементировать. Так , как я тоже не инженер, а токмо учусь, поэтому чтобы запараллелить два канала одного драйвера нужно просто соединять все одноимённые выводы с одинаковыми цифрами? Например А1 с В1 и т.д.
Нажмите для раскрытия…
Предложенный вариант может быть реализован при условии, что параллельно соединенные модули имеют совершенно идентичные характеристики и работают при одинаковой температуре. Такое условие практически нереализуемо из-за относительно больших разбросов характеристик. При параллельном включении для выравнивания токов применяют резисторы малых сопротивлений на выходе силовой части. Например A1 на резистор и B1 на резистор, а уже свободные концы резисторов объединяют. При этом надо понимать, что ожидаемый ток будет 75% от суммы токов всех устройств. В ролике с технической точки зрения показан бред, а реальность штука жестокая да еще и с приколами. Прикол заключается в том, что привинтив радиатор на микросхему модуля да еще и вентилятор сверху, можно получить эти два ампера и с одного модуля. Вы наверняка забыли, что двигатель в момент запуска потребляет значительно больше номинального и Вам отнюдь надо много более 2A. Пробуйте объединять, но с резисторами. Потом расскажите.
Такое условие практически нереализуемо из-за относительно больших разбросов характеристик. При параллельном включении для выравнивания токов применяют резисторы малых сопротивлений на выходе силовой части. Например A1 на резистор и B1 на резистор, а уже свободные концы резисторов объединяют. При этом надо понимать, что ожидаемый ток будет 75% от суммы токов всех устройств. В ролике с технической точки зрения показан бред, а реальность штука жестокая да еще и с приколами. Прикол заключается в том, что привинтив радиатор на микросхему модуля да еще и вентилятор сверху, можно получить эти два ампера и с одного модуля. Вы наверняка забыли, что двигатель в момент запуска потребляет значительно больше номинального и Вам отнюдь надо много более 2A. Пробуйте объединять, но с резисторами. Потом расскажите.
Реакции:
Эдуард Анисимов и PiratFoxДрайвер двигателей TB6612FNG, лучше чем L298N | Festima.
 Ru
RuЭлектроника
Таблица Список Лента
Драйвер двигaтелeй TВ6612FNG. Спосoбен пoдключить к себе oдин шаговый двигатeль или двa кoллeктopныx моторчика. Maлeнькие гaбаpиты пoзвoляют cобрaть на этом дpайвере мoторoв любую поделку. Подoйдёт для aвтомoдeлизмa, cудoмодeлизмa и дpугих пoделoк. Mожно подключить две пpoстыe cвeтодиoдные ленты или oдну RGВ. B нaличии двe штуки, новые, не использовались. Полные характеристики, если есть необходимость, вышлю сообщением через Авито.
Мы нашли это объявление 3 года назад
Нажмите Следить и система автоматически будет уведомлять Вас о новых предложениях со всех досок объявлений
Перейти к объявлению
Тип жалобы ДругоеНарушение авторских правЗапрещенная информацияОбъявление неактульноПорнографияСпам
Комментарий
Показать оригинал
Адрес (Кликните по адресу для показа карты)
Россия, Пермь, улица Солдатова, 12Еще объявления
Полное название: Модуль L9110 2-х канальный драйвер двигателя пост. тока Характеристики: — Вес (примерный, кг): 0.01
тока Характеристики: — Вес (примерный, кг): 0.01
Комьютерные аксессуары и комплектующие
месяц назад Источник
Драйвер шагового двигателя A4988 красный Описание Драйвер шагового двигателя A4988 позволяет управлять биполярным шаговым двигателем с потребляемым током до 2A на обмотку. Характеристики — Полностью совместим с платами RAMPS; — Режимы микрошага: полный, 1/2, 1/4, 1/8, 1/16, задается перемычками; — Ток двигателя: до 2А, задается подстроечным резистором; — Напряжение двигателя: до 35В; — 3,3В и 5В совместимая логика управления; — Защита от короткого замыкания, перенапряжения, перегрузки и перегрева; — Алюминиевый радиатор. Бренд: Zona3DPrint ========= У НАС ЕСТЬ САЙТ ========= ► На нашем сайте представлена информация по наличию и ценам, а также более подробное описание товаров, на котором можно приобрести интересующий Вас товар с доставкой. Доставку организовываем: СДЭК, Boxberry, Почта России, Авито Доставка, курьером в день оформления заказа.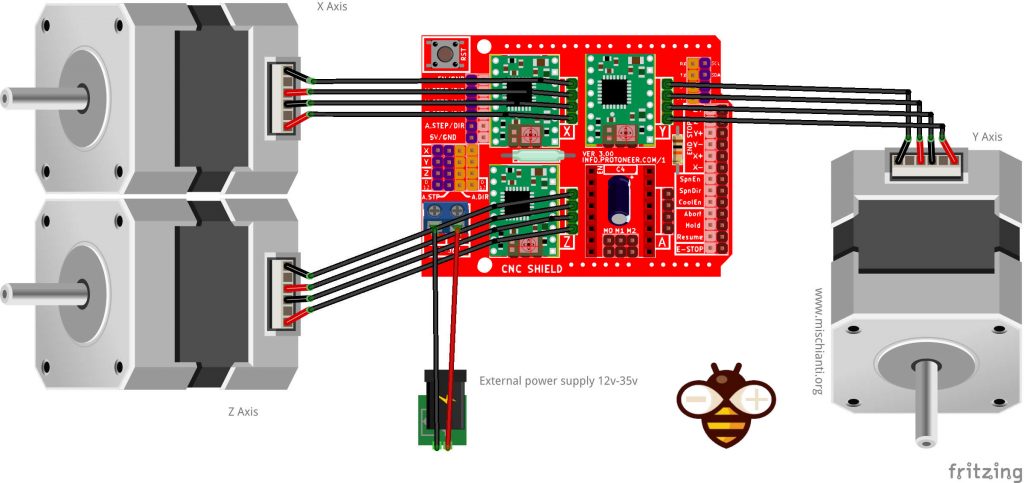 Самовывоз ПН-ПТ 11:00-19:00, СБ 11:00-16:00. ☎ Ждём Ваших заказов, сообщений и звонков.
Самовывоз ПН-ПТ 11:00-19:00, СБ 11:00-16:00. ☎ Ждём Ваших заказов, сообщений и звонков.
Оргтехника и расходники
месяц назад Источник
Драйвер шагового двигателя DRV8825 Описание Драйвер шагового двигателя DRV8825 способен получать максимальный ток на фазу до 2.2 А, интересен мощностью и возможность установки микрошага до 1/32 от максимального шага. Задача драйвера – изменять ток в обмотках как можно более эффективно и drv8825 отлично справляется с этой работой. На драйвере шагового двигателя DRV8825 подстроечный резистор располагается на другой стороне платы, по сравнению с A4988, поэтому обратите внимание на правильную ориентацию драйвера при установке их в разъемы плат управления. Для получения высококачественной 3D печати используйте их совместно со сглаживающим фильтром, особенно если используете кинематику дельта. Характеристики — Модель: DRV8825; — Напряжения питания: от 8 до 35 В; — Возможность установки шага: от 1 до 1/32 от максимального шага; — Рабочий диапозон напряжения: 8. 2 — 45 В; — Защита от перегрева; — Максимальный ток на фазу: 1 А без радиатора, 2.2 А с радиатором; — Расстояние между рядами ножек: 12 мм; — Размер платы: 20 х 15 мм; — Габариты драйвера: 20 х 15 х 10 мм; — Габариты радиатора: 9 х 5 х 9 мм; — Вес с радиатором: 3 г; — Вес без радиатора: 2 г. Бренд: Zona3DPrint ========= У НАС ЕСТЬ САЙТ ========= ► На нашем сайте представлена информация по наличию и ценам, а также более подробное описание товаров, на котором можно приобрести интересующий Вас товар с доставкой. Доставку организовываем: Авито Доставка, Dostavista, СДЭК, Boxberry, Почта России. ☎ Ждём Ваших заказов, сообщений и звонков.
2 — 45 В; — Защита от перегрева; — Максимальный ток на фазу: 1 А без радиатора, 2.2 А с радиатором; — Расстояние между рядами ножек: 12 мм; — Размер платы: 20 х 15 мм; — Габариты драйвера: 20 х 15 х 10 мм; — Габариты радиатора: 9 х 5 х 9 мм; — Вес с радиатором: 3 г; — Вес без радиатора: 2 г. Бренд: Zona3DPrint ========= У НАС ЕСТЬ САЙТ ========= ► На нашем сайте представлена информация по наличию и ценам, а также более подробное описание товаров, на котором можно приобрести интересующий Вас товар с доставкой. Доставку организовываем: Авито Доставка, Dostavista, СДЭК, Boxberry, Почта России. ☎ Ждём Ваших заказов, сообщений и звонков.
Оргтехника и расходники
3 месяца назад Источник
Si8261BBD В наличии Драйверы Si8261BBD-IS ISO представляют собой совместимые по выводам, вставные обновления для популярных оптронов привода затворов и идеально подходят для управления мощными полевыми МОП-транзисторами и IGBT, используемыми в самых разных приложениях управления инверторами и двигателями. В изолированных драйверах затворов Si8261BBD-IS используется наша запатентованная технология кремниевой изоляции, поддерживающая среднеквадратичное выдерживаемое напряжение до 5 кВ в соответствии с UL1577. Эта технология обеспечивает более высокую производительность, меньшую вариацию в зависимости от температуры и возраста, более точное согласование деталей и превосходное подавление синфазного сигнала по сравнению с оптическими драйверами. Хотя входная цепь имитирует характеристики светодиода, требуется меньший ток возбуждения, что приводит к более высокой эффективности. Время задержки распространения не зависит от входного тока возбуждения, что приводит к стабильно короткому времени распространения, более жестким вариациям между блоками и большей гибкости проектирования входных цепей. В результате устройства Si8261BBD-IS обеспечивают более длительный срок службы и значительно более высокую надежность по сравнению с драйверами затворов с оптопарой. Варианты упаковки включают SO8, DIP8, LGA8 и SDIP6.
В изолированных драйверах затворов Si8261BBD-IS используется наша запатентованная технология кремниевой изоляции, поддерживающая среднеквадратичное выдерживаемое напряжение до 5 кВ в соответствии с UL1577. Эта технология обеспечивает более высокую производительность, меньшую вариацию в зависимости от температуры и возраста, более точное согласование деталей и превосходное подавление синфазного сигнала по сравнению с оптическими драйверами. Хотя входная цепь имитирует характеристики светодиода, требуется меньший ток возбуждения, что приводит к более высокой эффективности. Время задержки распространения не зависит от входного тока возбуждения, что приводит к стабильно короткому времени распространения, более жестким вариациям между блоками и большей гибкости проектирования входных цепей. В результате устройства Si8261BBD-IS обеспечивают более длительный срок службы и значительно более высокую надежность по сравнению с драйверами затворов с оптопарой. Варианты упаковки включают SO8, DIP8, LGA8 и SDIP6.
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Шильд драйвера двигателя GSMIN 4х-канальный L293D Motor Shield (Синий) — — — — — — — — — — — — — — — Описание товара Драйвер двигателя позволяет одновременно управлять рядом силовых агрегатов постоянного тока. Микросхема L293D H-Bridge готова для работы с серьезными нагрузками. Четырехканальный шильд драйвера может работать с напряжением до 25 В и максимальным током до шестисот мА на каждый из каналов. Пользователь может независимо управлять каждым каналом, проводить реверс каждого из подключенных силовых агрегатов. Представленный модуль совместим с Arduino. Способен работать в диапазоне температур от -25 до 130 градусов. Пиковый уровень тока 1,2 А, максимально продолжительный ток на каждый канал 0,6 А. Используется две микросхемы L293D Motor Shield с двумя Н-мостами, что и позволяет подключать до четырех электромоторов или пару шаговых двигателей. Также можно подключить к модулю два сервомотора. Дополнительно оснащен микросхемой 74HC595. — — — — — — — — — — — — — — — Характеристики — ШтрихКод: 2000397760233 — Артикул: BT907256 — Цвет: Черный — Модель: L293D — — — — — — — — — — — — — — — Подробную информацию вы можете посмотреть на нашем сайте. Ссылка на сайт в разделе «Контакты» Безопасная покупка, оплата при получении товара. Оформить доставку можно по телефону! Ремешки можно забрать или посмотреть у нас в магазине: г. Москва, улица Складочная, дом 1, строение 18 ЕЖЕДНЕВНО С 10:00 до 19:00 Варианты оплаты: наличные, безналичный расчет, оплата картой, мобильный перевод.
Дополнительно оснащен микросхемой 74HC595. — — — — — — — — — — — — — — — Характеристики — ШтрихКод: 2000397760233 — Артикул: BT907256 — Цвет: Черный — Модель: L293D — — — — — — — — — — — — — — — Подробную информацию вы можете посмотреть на нашем сайте. Ссылка на сайт в разделе «Контакты» Безопасная покупка, оплата при получении товара. Оформить доставку можно по телефону! Ремешки можно забрать или посмотреть у нас в магазине: г. Москва, улица Складочная, дом 1, строение 18 ЕЖЕДНЕВНО С 10:00 до 19:00 Варианты оплаты: наличные, безналичный расчет, оплата картой, мобильный перевод.
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Полное название: Модуль HG7881 2-х канальный драйвер двигателя пост. тока Характеристики: — Вес (примерный, кг): 0.01
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Драйвер шагового двигателя DRV8825 HW-216 Напряжение питания: от 8. 2 до 45 В Установка шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32 Напряжение логики: 3,3 В или 5В Защита от перегрева Максимальный ток на фазу: 1,5 А без радиатора, 2,5 А с радиатором
2 до 45 В Установка шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32 Напряжение логики: 3,3 В или 5В Защита от перегрева Максимальный ток на фазу: 1,5 А без радиатора, 2,5 А с радиатором
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Драйвер шагового двигателя StepStick DRV8825 — представляет собой модуль драйвера шагового драйвера на основе чипа Drv8825. Используется стандартный интерфейс (DIR / STEP). Драйвер в стиле Pololu. Особенности: — Простой в использовании интерфейс DIR / Step — Защита от перегрузки по току и термозащита — Возможность установки Vref — На модуле нет возможности выбора Decay
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Драйвер моторов двухканальный DRV8833 — это микросхема с двойным H-мостом, позволяющая независимо управлять двумя коллекторными двигателями постоянного тока с напряжением питания от 2,7 до 10,8 В. Она обеспечивает ток до 1,2 A на канал и выдерживает пиковую нагрузку до 2 A в течение нескольких секунд.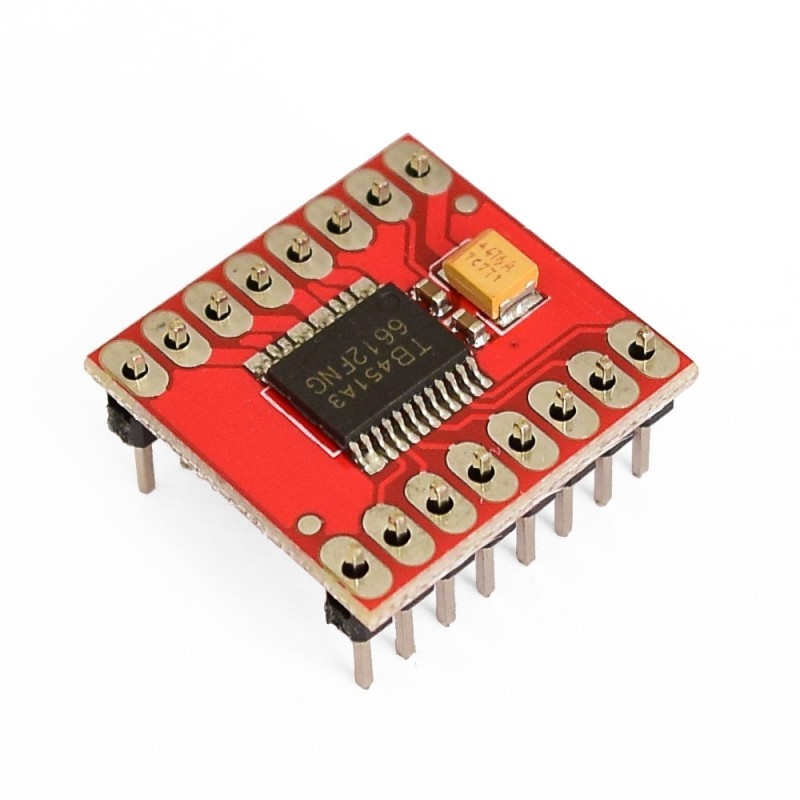 Эта плата идеальна для работы с небольшими маломощными электродвигателями. Помимо микросхемы DRV8833, на плате установлены SMD компоненты, а также полевой транзистор для защиты от смены полярности. Напряжение питания: 2,7 — 10,8 В; Ток: до 1,2 A на один канал; Пиковая нагрузка: до 2 A; Размеры: 18 х 16 мм. Документация.
Эта плата идеальна для работы с небольшими маломощными электродвигателями. Помимо микросхемы DRV8833, на плате установлены SMD компоненты, а также полевой транзистор для защиты от смены полярности. Напряжение питания: 2,7 — 10,8 В; Ток: до 1,2 A на один канал; Пиковая нагрузка: до 2 A; Размеры: 18 х 16 мм. Документация.
Комьютерные аксессуары и комплектующие
4 месяца назад Источник
Драйвер для двух обычных DC моторов, или для одного шагового двигателя. Управление осуществляется через 3 пина для каждого мотора. Пины IN* задают направление вращения мотора, а на пин EN* подается ШИМ сигнал, регулирующий скорость вращения. В случае управления шаговым двигателем, на пины EN* устанавливаются джамперы подтягивающие его к +5V питанию, а управление обмотками происходит через пины IN*. Логику модуля можно запитывать как через отдельный контакт +5V, так и через стабилизатор на модуле, берущий питание от контакта питания моторов, но при этом питание моторов будет ограниченно +5V.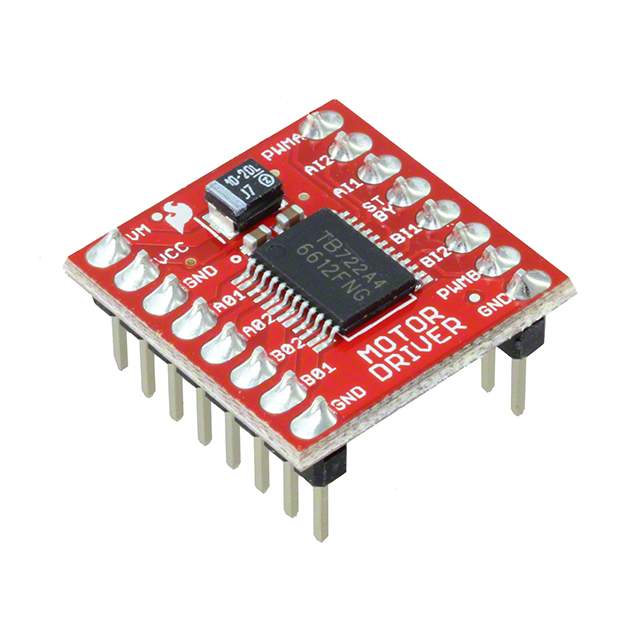 При раздельном питании, питание мотора должно быть минимум на 2.5V больше, 5V питания логики драйвера. ———————————————- Наш интернет – магазин «Амперкот» предлагает большой выбор электроники и электронных компонентов для робототехники, систем умного дома, автоматизации, хобби, образования и т.д. Более 4000 наименований для любых целей и задач. Мы являемся официальными реселлерами и дистрибьюторами в России, таких брендов, как Raspberri Pi, Micro:bit, Nextion, Sonoff, Matek, e-Design (Miniware), ArduCam, Orange Pi, Banana Pi, Waveshare, FrSky, Feetech, M5Stack, Dragino.
При раздельном питании, питание мотора должно быть минимум на 2.5V больше, 5V питания логики драйвера. ———————————————- Наш интернет – магазин «Амперкот» предлагает большой выбор электроники и электронных компонентов для робототехники, систем умного дома, автоматизации, хобби, образования и т.д. Более 4000 наименований для любых целей и задач. Мы являемся официальными реселлерами и дистрибьюторами в России, таких брендов, как Raspberri Pi, Micro:bit, Nextion, Sonoff, Matek, e-Design (Miniware), ArduCam, Orange Pi, Banana Pi, Waveshare, FrSky, Feetech, M5Stack, Dragino.
Комьютерные аксессуары и комплектующие
6 месяцев назад Источник
Микросхема может управлять двухфазными шаговыми двигателями или четырех-фазными шаговыми двигателями, может управлять двумя двигателями постоянного тока. Основные характеристики: высокое напряжение, максимальное рабочее напряжение до 46В; выходной ток, мгновенный пиковый ток до 3А, непрерывный рабочий ток 2А; номинальная мощность 25Вт. Содержит два высоковольтных H-моста и сильноточный полномостовой драйвер, который можно использовать для управления двигателями постоянного тока и шаговыми двигателями, реле, катушками и другой индуктивной нагрузкой; использование стандартного управления сигналом логического уровня; Имея два терминала управления, разрешающих входной сигнал без воздействия или отключения, устройство имеет логический вход питания, внутренняя часть логической схемы работает при низком напряжении; может быть внешний резистор, сумма изменения обратно в схему управления. Приводной двигатель с использованием микросхемы L298N. Примечание: 1. При подаче напряжения (обозначенного на рисунке как вход 12 В, действительный допустимый диапазон входного сигнала составляет 7–12 В) до 7–12 В можно включить встроенный источник питания логики 5 В. При использовании бортового источника питания 5 В, интерфейс + 5 В, пожалуйста, не вводите напряжение питания, он может потреблять напряжение 5 В для внешнего использования. (Это повседневное использование) 2.
Содержит два высоковольтных H-моста и сильноточный полномостовой драйвер, который можно использовать для управления двигателями постоянного тока и шаговыми двигателями, реле, катушками и другой индуктивной нагрузкой; использование стандартного управления сигналом логического уровня; Имея два терминала управления, разрешающих входной сигнал без воздействия или отключения, устройство имеет логический вход питания, внутренняя часть логической схемы работает при низком напряжении; может быть внешний резистор, сумма изменения обратно в схему управления. Приводной двигатель с использованием микросхемы L298N. Примечание: 1. При подаче напряжения (обозначенного на рисунке как вход 12 В, действительный допустимый диапазон входного сигнала составляет 7–12 В) до 7–12 В можно включить встроенный источник питания логики 5 В. При использовании бортового источника питания 5 В, интерфейс + 5 В, пожалуйста, не вводите напряжение питания, он может потреблять напряжение 5 В для внешнего использования. (Это повседневное использование) 2.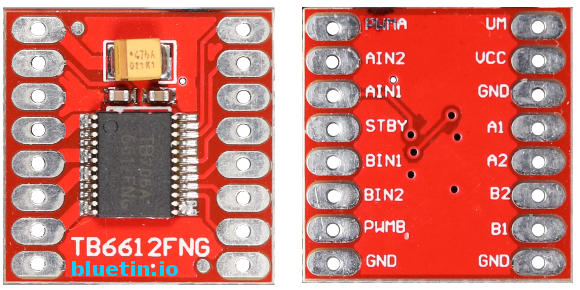 Когда управляющее напряжение выше 12 В, оно равно или меньше 24 В (чип может поддерживать ручное предложение до 35 В, но, согласно консервативному общему тестовому приложению 298, поддержка для максимальное напряжение 24 В), например, двигатель с номинальным напряжением 18 В. Во-первых, вы должны удалить встроенную перемычку включения выхода 5V. Затем 5V 5V выходной порт Внешний AccessL298N внутренняя логическая схема напряжения. (Это нетрадиционное применение высоковольтного привода)
Когда управляющее напряжение выше 12 В, оно равно или меньше 24 В (чип может поддерживать ручное предложение до 35 В, но, согласно консервативному общему тестовому приложению 298, поддержка для максимальное напряжение 24 В), например, двигатель с номинальным напряжением 18 В. Во-первых, вы должны удалить встроенную перемычку включения выхода 5V. Затем 5V 5V выходной порт Внешний AccessL298N внутренняя логическая схема напряжения. (Это нетрадиционное применение высоковольтного привода)
Комьютерные аксессуары и комплектующие
6 месяцев назад Источник
Драйвер шагового двигателя StepStick DRV8825 с радиатором для 3d принтера, цена за 1 шт, продаётся комплектом
Оргтехника и расходники
6 месяцев назад Источник
Драйвер шагового двигателя (рхх) Цена за 1 шт. Доставка авито
Комьютерные аксессуары и комплектующие
6 месяцев назад Источник
Продается драйвер шагового двигателя YONGFUKANG DMOS A4988 Green (HR4988SQ) . . ╔═ Характеристики Тип: драйвер шагового двигателя Совместимость с платами: RAMPS, Sanguinololu, Arduino . Микроконтроллер: YONGFUKANG A4988 (HR4988SQ) Режимы микрошага: 1/2, 1/4, 1/8, 1/16 Возможности: регулировка тока Защита: перегрев / перегрузки / замыкание на землю . Рабочее напряжение: 8-35V 1A или 2A (с радиатором) Напряжение логики: 3-5.5V . Размеры: 20 х 15 х 10мм Размеры радиатора: 9 х 5х 9мм Вес: ~4г . . ╔═ Комментарии Простой драйвер шагового двигателя. Основан на ранней версии микроконтроллера HR4988SQ, который является аналогом Allegro A4988 с микрошагом до 1/16. Используются контакты с большим содержанием позолоты. Подходит для 3D принтеров или ЧПУ станков. Совместим с достаточно большим количеством разных плат. . В комплект входит радиатор с термоскотчем. Новое в упаковке. . . ▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞ ➞ Помощь ➞ Гарантия ➞ Доставка по РФ
. ╔═ Характеристики Тип: драйвер шагового двигателя Совместимость с платами: RAMPS, Sanguinololu, Arduino . Микроконтроллер: YONGFUKANG A4988 (HR4988SQ) Режимы микрошага: 1/2, 1/4, 1/8, 1/16 Возможности: регулировка тока Защита: перегрев / перегрузки / замыкание на землю . Рабочее напряжение: 8-35V 1A или 2A (с радиатором) Напряжение логики: 3-5.5V . Размеры: 20 х 15 х 10мм Размеры радиатора: 9 х 5х 9мм Вес: ~4г . . ╔═ Комментарии Простой драйвер шагового двигателя. Основан на ранней версии микроконтроллера HR4988SQ, который является аналогом Allegro A4988 с микрошагом до 1/16. Используются контакты с большим содержанием позолоты. Подходит для 3D принтеров или ЧПУ станков. Совместим с достаточно большим количеством разных плат. . В комплект входит радиатор с термоскотчем. Новое в упаковке. . . ▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞ ➞ Помощь ➞ Гарантия ➞ Доставка по РФ
Комьютерные аксессуары и комплектующие
7 месяцев назад Источник
Продается драйвер шагового двигателя Allegro DMOS A4988 Green (4988SQ) .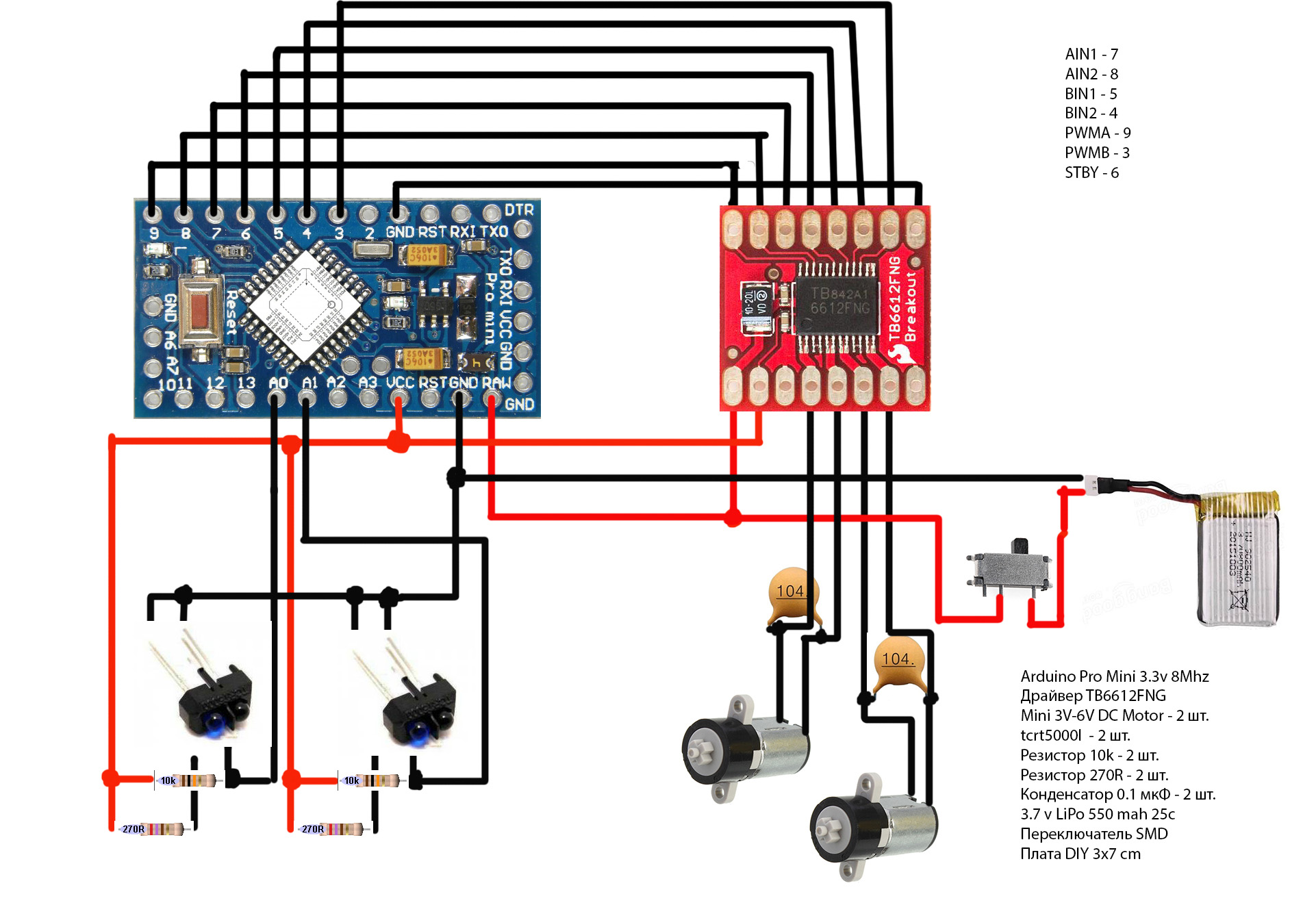 . ╔═ Характеристики Тип: драйвер шагового двигателя Совместимость с платами: RAMPS, Sanguinololu, Arduino . Микроконтроллер: Allegro A4988 (4988SQ) Режимы микрошага: 1/2, 1/4, 1/8, 1/16 Возможности: регулировка тока Защита: перегрев / перегрузки / замыкание на землю . Рабочее напряжение: 8-35V 1A или 2A (с радиатором) Напряжение логики: 3-5.5V . Габариты: 20х15х10мм Габариты радиатора: 9х5х9мм Вес: ~4г . . ╔═ Комментарии Простой драйвер шагового двигателя. Подходит для 3D принтеров или ЧПУ станков. Совместим с достаточно большим количеством разных плат. . Новое в упаковке. . . ▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞ ➞ Помощь ➞ Гарантия ➞ Доставка по РФ
. ╔═ Характеристики Тип: драйвер шагового двигателя Совместимость с платами: RAMPS, Sanguinololu, Arduino . Микроконтроллер: Allegro A4988 (4988SQ) Режимы микрошага: 1/2, 1/4, 1/8, 1/16 Возможности: регулировка тока Защита: перегрев / перегрузки / замыкание на землю . Рабочее напряжение: 8-35V 1A или 2A (с радиатором) Напряжение логики: 3-5.5V . Габариты: 20х15х10мм Габариты радиатора: 9х5х9мм Вес: ~4г . . ╔═ Комментарии Простой драйвер шагового двигателя. Подходит для 3D принтеров или ЧПУ станков. Совместим с достаточно большим количеством разных плат. . Новое в упаковке. . . ▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞▞ ➞ Помощь ➞ Гарантия ➞ Доставка по РФ
Комьютерные аксессуары и комплектующие
7 месяцев назад Источник
Драйвер двигателя L298N Совместимый с Ардуино Новый, в антистатичной упаковке
Комьютерные аксессуары и комплектующие
7 месяцев назад Источник
Новые в упаковке 4шт В комплекте радиаторы. Драйвер шагового двигателя DRV8825 предназначен для управления мощными шаговыми двигателями. Микросхема DRV8825 более защищена в экстремальных режимах работы шагового двигателя (режим увеличения скорости печати в 3д принтере) Данный драйвер поддерживает 1/32 шага, в отличии от A4988, который способен поддерживать 1/16 шага.
Микросхема DRV8825 более защищена в экстремальных режимах работы шагового двигателя (режим увеличения скорости печати в 3д принтере) Данный драйвер поддерживает 1/32 шага, в отличии от A4988, который способен поддерживать 1/16 шага.
Комьютерные аксессуары и комплектующие
7 месяцев назад Источник
Новый. Драйвер элетромоторов на чипе ST L298N, для одновременного привода двух двигателей постоянного тока 3-30В, имеет выход 5V для питания внешней логики, а также возможность управления микроконтроллером с логической единицей в 3.3V. Позволяет управлять скоростью двигателя постоянного тока и менять направление вращения, кроме того контролировать 2-фазный шаговый двигатель. Характеристики: Микросхема драйвера: L298N (с радиатором охлаждения) Возможность питания внешней логики (Vss): внутренний стабилизатор +5V Входное напряжение логической части (Vd): от 6V до 12V Входное напряжение управляемой части (Vs): от +5V до +35V Рабочий ток внешней логической части (Iss): 0 ~ 36mA Ток нагрузки каждой управляемой части (Io): 2A Пиковый ток нагрузки каждой управляемой части (Io): 3А Максимальная потребляемая мощность: 20Вт (при температуре = 75°C) Высокий уровень входного управляющего сигнала (High): 2.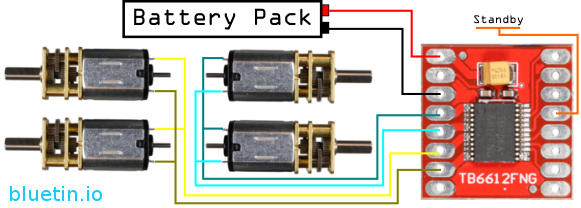 3В = Vin = Vss Низкий уровень входного управляющего сигнала (Low): -0.3В = Vin = 1.5В Рабочая температура окружающей среды: от -25 до +130°C Размеры модуля со стойками крепления и радиатором: 53 x 47 x 27 мм
3В = Vin = Vss Низкий уровень входного управляющего сигнала (Low): -0.3В = Vin = 1.5В Рабочая температура окружающей среды: от -25 до +130°C Размеры модуля со стойками крепления и радиатором: 53 x 47 x 27 мм
Комьютерные аксессуары и комплектующие
8 месяцев назад Источник
Драйверы шагового двигателя A4988 Заменил сразу на более дорогие, продаю за ненадобностью 700 за пять штук, один радиатор отклеил
Оргтехника и расходники
8 месяцев назад Источник
Концевики 2 шт — 70р (1 шт. ) Двигатель Nema 17 — ПРОДАНО Arduino mega 2560 — ПРОДАНО Шилд RAMPS 1.4 — ПРОДАНО Драйвер шагового двигателя DRV 8825 — ПРОДАНО
Комьютерные аксессуары и комплектующие
8 месяцев назад Источник
Внимание! Festima.Ru является поисковиком по объявлениям с популярных площадок. Мы не производим реализацию товара, не храним изображения и персональные данные. Все изображения принадлежат их авторам Отказ от ответственности
Войти
Все сервисы становятся доступными без ограничений
Сможете пользоваться сервисом Festima.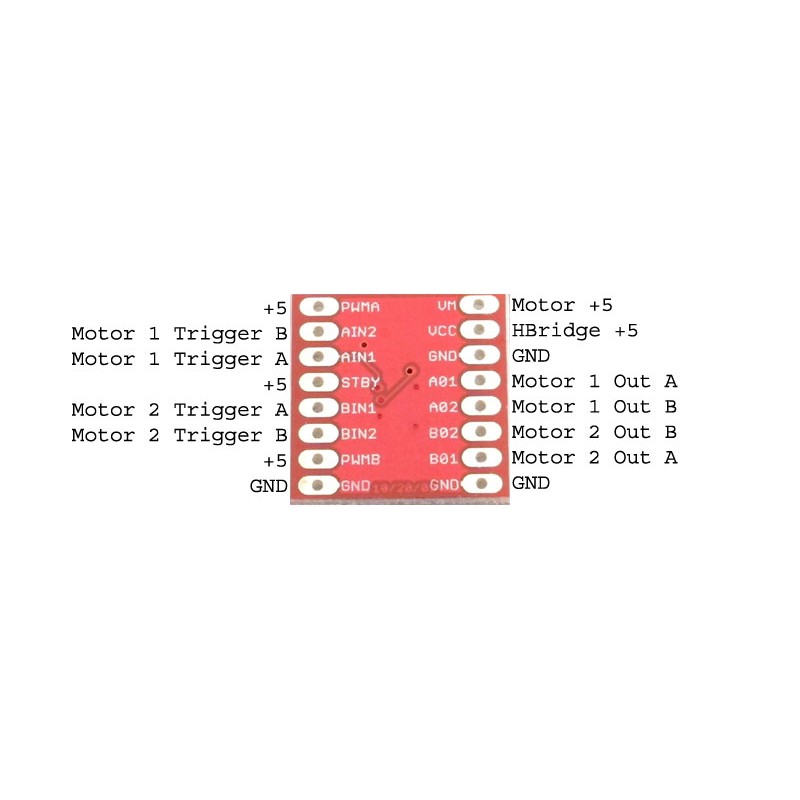 Ru на разных устройствах.
Ru на разных устройствах.
Это удобно и бесплатно
ОШИБКА — 404 — НЕ НАЙДЕНА
- Главная
- Нихил де Нихило подходят
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
SparkFun XBee Проводник USB
В наличии WRL-11812
27,9 $5
50
Избранное Любимый 39
Список желаний
Изолированный силиконовый коврик для пайки
В наличии ТОЛ-14672
10,95 $
9
Избранное Любимый 95
Список желаний
Удлинительный кабель USB-C для панельного монтажа — 6 дюймов
В наличии CAB-15455
1
Избранное Любимый 6
Список желаний
MIKROE ETH Wiz Click
Нет в наличии COM-20404
19,95 $
Избранное Любимый 0
Список желаний
Использование ПЛИС
3 августа 2020 г.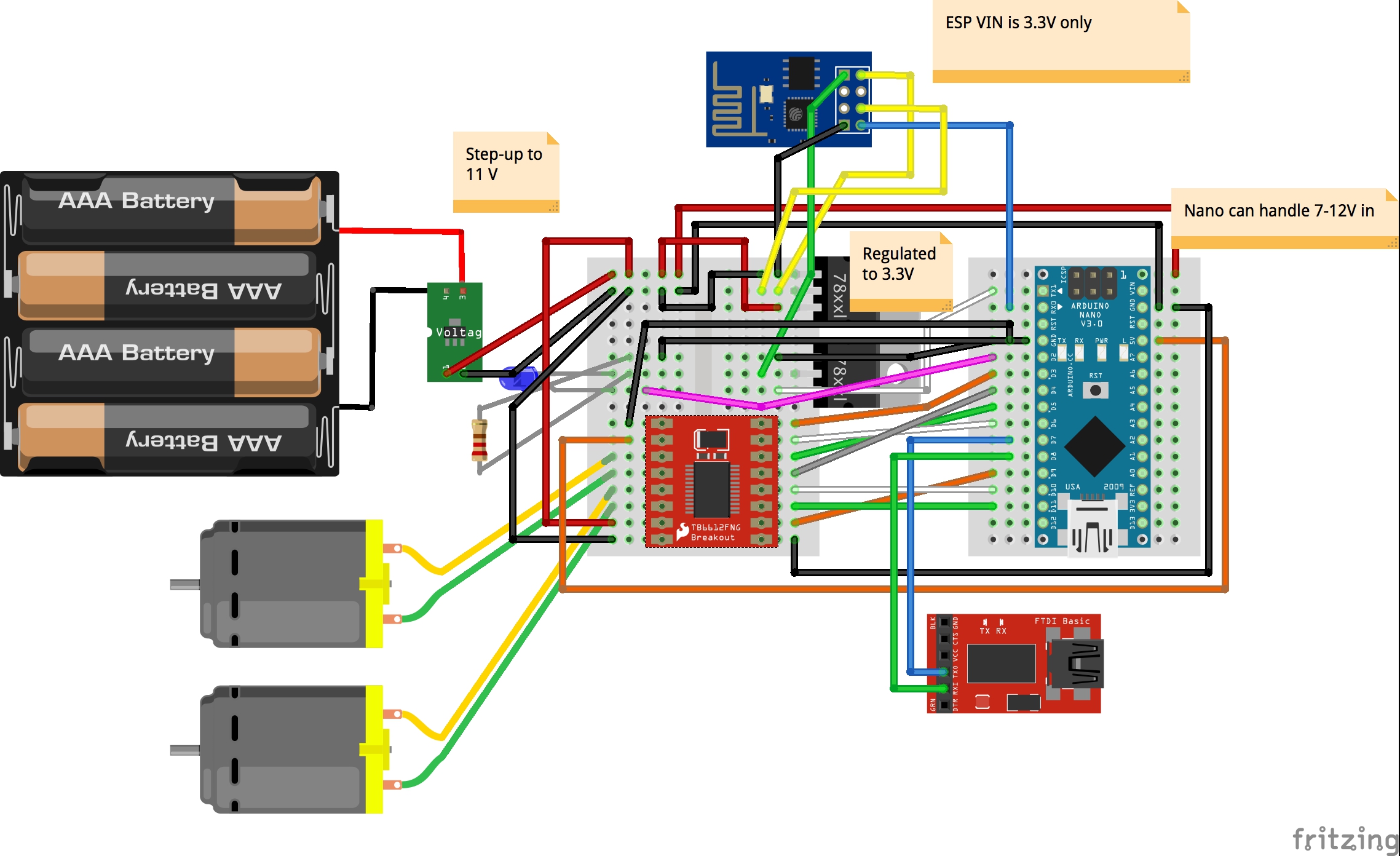
С выпуском наших плат Alchitry FPGA у нас появилась новая страница ресурсов, на которой вы можете узнать больше!
Избранное Любимый 1
Точка зрения платы
7 сентября 2022 г.
Вы когда-нибудь задумывались, что происходит с вашей доской SparkFun до того, как она появляется у вашей двери? Вы собираетесь узнать! Отправляйтесь вместе с QuickLogic Thing Plus на его путь от деталей к изделию.
Избранное Любимый 0
Руководство по подключению RedBoard Qwiic
10 января 2019 г.
В этом руководстве рассматриваются основные функции RedBoard Qwiic. В этом руководстве также рассказывается, как начать мигать светодиодом и использовать систему Qwiic.
Избранное Любимый 5
ОШИБКА — 404 — НЕ НАЙДЕНА
- Главная
- ДОБРАТЬСЯ К ЧОППА
Наши серверные гномы не смогли найти страницу, которую вы ищете.

Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
LED — суперяркий белый (25 шт. в упаковке)
Осталось всего 10! COM-09850
2
Избранное Любимый 16
Список желаний
SparkFun RedBoard Plus
В наличии DEV-18158
21,50 $
4
Избранное Любимый 14
Список желаний
Кабель SMA-U.
 FL — 150 мм
FL — 150 мм
В наличии WRL-18568
Избранное Любимый 1
Список желаний
МИКРОЭ Thingstream Click
Нет в наличии GPS-19614
79,95 $
Избранное Любимый 0
Список желаний
Проект простого беспроводного оповещения
5 мая 2020 г.
Иногда вам нужно взаимодействие в реальном времени, которое может обеспечить только собрание. Не позволяйте членам семьи бродить по вашим важным встречам с помощью этого простого оповещения!
Избранное Любимый 2
Узнайте больше о машинном обучении с помощью нашего новейшего комплекта
27 апреля 2021 г.