Что такое тестер шагового двигателя. Как работает тестер-драйвер для проверки ШД. Какие функции выполняет устройство для диагностики шаговых моторов. Где применяются тестеры ШД.
Что такое тестер шагового двигателя
Тестер шагового двигателя — это специальное устройство, предназначенное для проверки и диагностики шаговых электродвигателей. Основные функции тестера:
- Проверка работоспособности ШД
- Определение параметров и характеристик двигателя
- Имитация различных режимов работы
- Выявление неисправностей
Тестер позволяет подавать управляющие сигналы на обмотки шагового двигателя и анализировать его поведение. Это дает возможность оценить исправность мотора и его соответствие заявленным характеристикам.
Принцип работы тестера-драйвера шагового двигателя
Тестер-драйвер для проверки шаговых двигателей состоит из следующих основных блоков:
- Блок управления и генерации импульсов
- Силовой драйвер для питания обмоток ШД
- Интерфейс для подключения двигателя
- Органы управления (кнопки, переключатели)
- Индикация режимов работы
Принцип работы заключается в следующем:
- На тестер подается питание
- К нему подключается проверяемый шаговый двигатель
- С помощью органов управления задаются параметры тестирования
- Тестер генерирует управляющие импульсы и подает их на обмотки ШД через драйвер
- Оператор контролирует вращение вала двигателя и показания индикаторов
Основные функции тестера шагового двигателя
Современные тестеры для диагностики шаговых моторов выполняют следующие ключевые функции:
- Проверка работоспособности в различных режимах (полно-, полу- и микрошаговый)
- Измерение сопротивления и индуктивности обмоток
- Определение угла шага и количества шагов на оборот
- Тестирование в разных скоростных режимах
- Проверка удерживающего момента
- Выявление обрывов и коротких замыканий в обмотках
- Имитация работы под нагрузкой
Где применяются тестеры шаговых двигателей
Основные области применения тестеров ШД:
- Производство шаговых двигателей — проверка после сборки
- Сервисные центры — диагностика неисправностей
- Роботехнические лаборатории — подбор и настройка ШД
- Производство станков с ЧПУ — входной контроль комплектующих
- Образовательные учреждения — обучение работе с шаговыми моторами
Тестеры позволяют быстро и точно оценить состояние шагового двигателя, выявить скрытые дефекты и подобрать оптимальные режимы работы. Это делает их незаменимым инструментом для разработчиков и обслуживающего персонала.
Виды тестеров шаговых двигателей
Существует несколько основных разновидностей тестеров для проверки шаговых моторов:
- Простые тестеры-драйверы для базовой проверки ШД
- Многофункциональные профессиональные тестеры с расширенным функционалом
- Компьютерные системы тестирования с подключением к ПК
- Портативные аккумуляторные тестеры для работы «в поле»
- Универсальные тестеры для разных типов электродвигателей
Выбор конкретного типа тестера зависит от решаемых задач и условий эксплуатации. Для простой проверки работоспособности подойдет базовая модель, а для детальной диагностики потребуется профессиональный многофункциональный прибор.
Как выбрать тестер шагового двигателя
При выборе тестера ШД следует обратить внимание на следующие ключевые параметры:
- Поддерживаемые типы шаговых двигателей (униполярные/биполярные)
- Максимальный ток обмоток тестируемых ШД
- Диапазон напряжений питания двигателей
- Наличие разных режимов управления (полно-, полу-, микрошаг)
- Возможность регулировки скорости и ускорения
- Наличие защиты от КЗ и перегрузки
- Интерфейс подключения к ПК (при необходимости)
- Эргономика и удобство управления
Также важно учитывать условия эксплуатации, частоту использования и бюджет. Для профессионального применения лучше выбрать более функциональную модель от известного производителя.
Заключение
Тестер шагового двигателя — это полезный инструмент для диагностики и проверки ШД. Он позволяет быстро оценить работоспособность мотора, выявить неисправности и подобрать оптимальные режимы работы. Использование тестера значительно упрощает обслуживание и ремонт оборудования с шаговыми двигателями.
Тестер-драйвер шагового двигателя
Когда я начал собирать свой первый самосборный 3D принтер (вариация на тему HyberCube Evolution, но об этом позже), то уже на одном из первых этапов возникла необходимость покрутить шаговые двигатели оси Z, а плата управления еще не пришла. Да и честно сказать, слишком много работы для такой простой задачи. Ведь надо сконфигурировать и залить прошивку, подключить питание, дисплей, двайверы, все это временно подвесить на соплях, сильно повышая шансы на случайное замыкание и досрочный выход из строя самой дорогой запчасти. Да и ждать не охота, вся работа встала из-за того, что мне нечем крутануть туда-сюда один или два движка для подстройки расположения механических компонентов. Руками? Не так быстро, а главное — не точно. Ну как вы крутанете одновременно два мотора, скажем на 100 оборотов (каждый оборот — 200 шагов), не ошибившись ни на шаг, т. к. это вызовет перекос? И вообще, хочется «погонять» ось приближенно к «боевым условиям», чтобы оно само гудело и ездило. Ровно и быстро. В общем, пришлось что-то выдумывать.
Так как у меня уже была горсть дешевейших и надежнейших драйверов А4988, которые суют во все китайские 3D принтеры по-умолчанию, задачу я решил «в лоб». Что там нужно, чтобы этот драйвер крутил вот такой биполярный шаговик (у меня стандартные NEMA 17 48мм)? Всего лишь указать драйверу направление (вывод DIR) логическим уровнем и подать импульсы на вывод STEP. Ну и подключить шаговик и питание, естественно. В итоге образовалась вот такая простая схема, оказавшаяся удобной и практичной. Все есть: «крутилка» скорости, тумблер «туда-сюда», тумблер «крутить/стоять». Джамперами JP1…JP3 можно выставить микрошаг в диапазоне от полного шага до 1/16, хотя на практике оказалось достаточно полношагового режима, но лишняя возможность может пригодиться. Итак, схема.
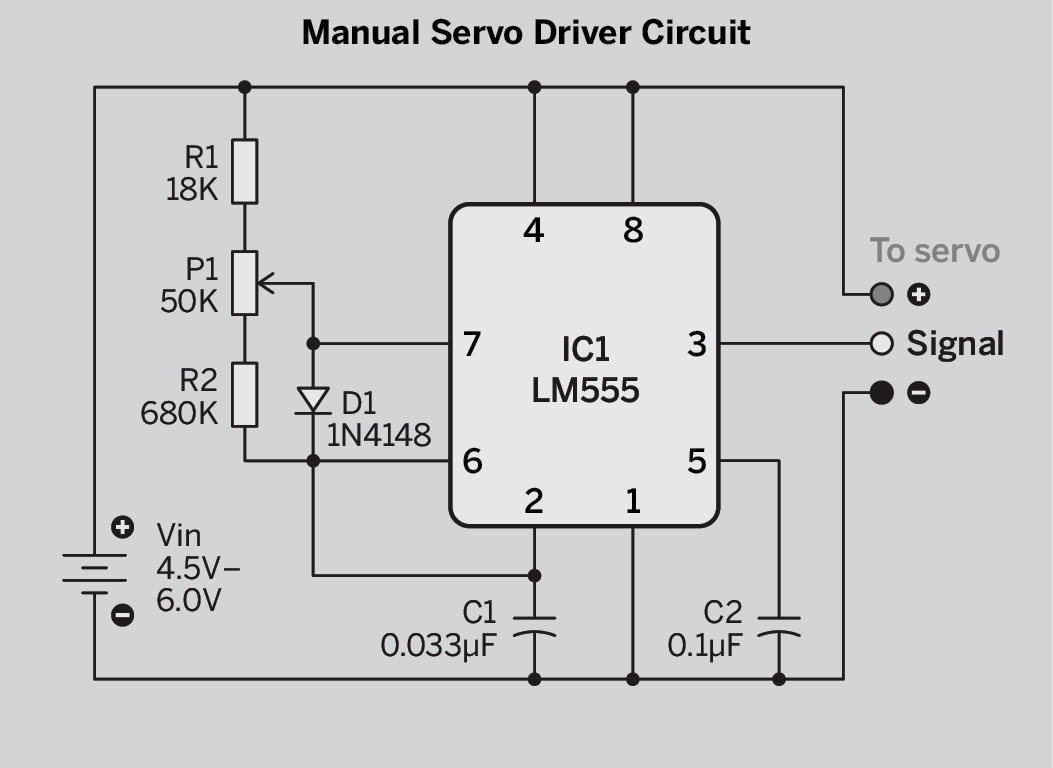
На популярном таймере 555 собран регулируемый генератор импульсов частотой примерно от 80 до 900 Герц (в режиме полного шага мотор крутится в диапазоне от «едва ползет» до «мчится со свистом»). Импульсы через тумблер SW1 попадают на вход STEP драйвера А4988, это режим «крутить». Если тумблер разомкнуть, драйвер перейдет в режим торможения (удерживания) мотора. Чтобы «отпустить» моторы, надо снять питание с драйвера. Тумблер SW2 переключает направление вращения шагового мотора. Резисторы R6 и R7 «подтягивают» соответствующие входы к «земле», на плате этих резисторов почему-то нет, хотя все прочие входы имеют «подтягивающие» к «земле» внутрисхемные резисторы. Вообще номиналы резисторов могут варьироваться в достаточно широких пределах, плюс-минус процентов 30 точно, схема сохраняет работоспособность. Точно так же не критична емкость конденсаторов, в принципе от 10нФ до 1мкФ пойдет любая керамика. Исключение — конденсатор С1, который желательно использовать пленочный. Значение емкости определяет диапазон частот, вместе с переменным резистором Р1. Номиналы С1 и Р1 можно изменять в широких пределах, сохраняя их произведение, как в исходной схеме. Скажем, можно взять емкость С1 0,47мкФ, но переменник Р1 тогда применить 20кОм. Диапазон частот, конечно, несколько сузится, но работать все будет нормально. Стабилизатор 78L05 можно заменить любым подходящим на напряжение 3.3..5В. Входное напряжение не желательно применять менее 12В и более 24В, драйвер выдерживает ток обмоток мотора 1А длительно, превышать это значение не стоит. Кто не в курсе — на драйвере А4988, как на многих других, установлен миниатюрный подстроечный резистор, которым выставляется максимальный ток шагового двигателя. Выбор максимального тока зависит от типа вашего шагового двигателя, сама же процедура многократно описана в сети, повторяться не вижу смысла. Кто не знает — гуглим «A4988 max current».
Таблица для выставления дробления шагов драйвера А4988 джамперами JP1..JP3
Схему собрал на второпях разведенной двусторонней платке размером 75х35мм, где верхний слой фольги играет роль общего провода (GND). Такой тип плат упрощает разводку, да и одностороннего стеклотекстолита под рукой не было. Все «земляные» выводы компонентов паяются прямо на фольгу, без отверстий, на фото видно. Панелька драйвера сделана из двух половинок распиленной панельки под выводную микросхему DIP16, также видно на фото (кликабельно). Плату в формате LAY прилагаю ниже, как и пару фоток, снятых на тапок. Номиналы деталей появляются при наведении на них курсора в программе Sprint Layout.
Печатная плата в формате Sprint Layout
Микрошаговый драйвер A3967 для тестера РХХ автомобиля
Продолжение предыдущего обзора о применении NE555mySKU.me/blog/aliexpress/35019.html
Теперь к нему добавился микрошаговый драйвер A3967 и что в итоге получилось.
Плату прислали в приличном герметичном антистатическом пакете
Содержимое
Китайцы не стали гадать, какие пины будут использованы, поэтому просто добавили гребёнку в пакетик — типа откуси сколько тебе надо и запаяй куда требуется. Это вполне нормальное решение, однако требуется пайка, что может отпугнуть некоторых потребителей.
Сама плата
Монтаж аккуратный, флюс привычно недомыт
Описание подключения от производителя
Для простейшего управления, достаточно подключить питание Power In (6-30В), двигатель Motor Coil (обе катушки), входные сигналы Step Input (Шаг) и Direction Input (Направление). Остальные сигналы используются по необходимости.
Даташит микросхемы драйвера A3967
Если хотите почитать о шаговых двигателях, приведу несколько ссылок
Книга о шаговых двигателях
О принципах управления
Наглядно работа шаговых двигателей
Щёлкните на изображении — именно так работает биполярный шаговый двигатель в полушаговом режиме
Драйвер позволяет управлять биполярным шаговым двигателем (ШД) в следующих режимах:
Полушаговый — на обмотки подаются импульсы с полной амплитудой питающего напряжения, сдвинутые по фазе на 90 градусов. Это самый распространённый метод управления ШД, имеющий следующие недостатки — повышенный нагрев на малых скоростях, низкая точность позиционирования, повышенный шум работы (щелчки шагов).
Полушаговый с токоограничением — на обмотки подаются импульсы ШИМ для ограничения тока через обмотки независимо от питающего напряжения и сопротивления обмоток, сдвинутые по фазе на 90 градусов. Недостатки — низкая точность позиционирования, повышенный шум работы (щелчки шагов + писк ШИМ даже без вращения).
Реальная схема платы драйвера
Драйвер имеет широкий диапазон питающего напряжения 6-30В и выдаёт на двигатель максимальный ток 750мА
На плате уже имеется стабилизатор напряжения для питания логики +5В либо +3,3В (при установке соответствующей перемычки)
Кроме того, стоят датчики тока в цепи питания обмоток и регулятор уставки тока, позволяющий задавать его в пределах 280мА — 830мА
Ну и наконец, для чего-же я его использовал? Был изготовлен тестер РХХ (Регулятор Холостого Хода), который как раз представляет собой биполярный шаговый двигатель. Некоторые автовладельцы и авторемонтники РХХ по ошибке называют датчиком.
Почти в любом бензиновом инжекторном авто стоит РХХ, который поддерживает установленные обороты двигателя на холостом ходу за счет изменения количества воздуха, подаваемого в двигатель при закрытом дросселе. РХХ расположен на дроссельном патрубке и представляет собой шаговый двигатель анкерного типа с двумя обмотками. Через червячную передачу вращательное движение шагового двигателя преобразуется в поступательное движение штока. Конусная часть штока располагается в канале подачи воздуха для обеспечения регулирования холостого хода двигателя. Шток регулятора выдвигается или втягивается в зависимости от управляющего сигнала контроллера. Регулятор холостого хода регулирует частоту вращения коленчатого вала в режиме холостого хода, управляя количеством воздуха, подаваемым в обход закрытой дроссельной заслонки. В полностью выдвинутом положении, конусная часть штока перекрывает подачу воздуха в обход дроссельной заслонки. При открывании клапан обеспечивает расход воздуха, пропорциональный перемещению штока (количеству шагов) от своего седла. На прогретом двигателе контроллер, управляя перемещением штока, поддерживает постоянную частоту вращения коленчатого вала на холостом ходу независимо от состояния двигателя и от изменения нагрузки.
Плата была немного доработана для конкретного применения:
— Установлены резисторы подтяжки 10кОм на входы Step и Direction, чтобы зафиксировать уровень при коммутации цепи
— Сдвинута вниз уставка токоограничения на 170мА — 500мА при помощи добавочного резистора до подстроечника, т.к. рабочий ток РХХ всего 180-200мА
Полная схема готового устройства совместно с генератором NE555
Дополнительно в цепи питания поставлен диод защиты от обратной полярности. Питается генератор от стабилизатора платы драйвера.
Нагрев платы драйвера незначителен.
В качестве тестового двигателя, использовал PXX 21203-1148300-04 от Нивы
После сборки на столе, проверил работу во всех режимах и в итоге выбрал микрошаг 1/8, наладил частоту генератора и токоограничение драйвера на уровне 180мА
Полученная осциллограмма тока в обмотках действительно напоминает синусоиду
Показать форму тока сразу в обоих обмотках не могу, т.к. осциллограф не работает с дифференциальными сигналами и имеет общую массу.
Амплитуда напряжений импульсов на обмотках равна питающему напряжению за вычетом падения напряжения на драйвере, т.к. он работает исключительно в ключевом режиме.
Для многих радиолюбителей, основная проблема — изготовить корпус для получения законченного изделия. Свои корпуса из чего только не делал: картон, гетинакс, текстолит, жесть, пластиковые коробочки (мыльницы, распаячные коробки). Сейчас чаще стараюсь брать готовые корпуса из старых устройств и приборов. На этот раз попался под руку старое неисправное промышленное реле времени ВЛ-64.
Внутренности были удалены, переменный резистор 15кОм оставлен — он пригодился вместо нижнего резистора генератора для оперативной подстройки частоты
Все компоненты неплохо там разместились, платы закреплял термоклеем.
Кнопку взял КМ-1, тумблеры МТ1
Получилось как-то так
Описание органов управления:
Кнопка «Пуск» — работа регулятора
Тумблер «В/З» — выдвинуть либо задвинуть шток регулятора
Тумблер «М/Б» — медленное либо быстрое движение штока регулятора. Медленное движение используется для управления установленным на авто РХХ. Быстрое движение используется для обслуживания РХХ (чистка и смазка), для съёма — установки штока.
Ручка регулятора — плавная настройка скорости движения штока РХХ. Единственная особенность — при вращении ручки по часовой стрелке, скорость движения снижается.
Для удобного подключения питания на провода установлены зажимы «крокодил», на выходе драйвера установлен унифицированный разъём подключения РХХ. Вся работа не торопясь заняла один выходной день — быстрее, чем писал этот обзор 🙂
Видео работы тестера РХХ на столе
Видео работы тестера РХХ на автомобиле
За видео просьба не пинать, других рук не имею…
В дальнейшем, расширю функционал — добавлю возможность проверки топливных форсунок.
Вывод: данный драйвер неплохо подходит для качественного управления маломощным биполярным шаговым двигателем. Если нужен более мощный драйвер — присмотритесь например к этому A4988 (A4983)
Программы для работы с шаговыми двигателями и шаговыми приводами для станков ЧПУ, контроллеров, программируемых блоков управления ШД
Программа SMC_Program предназначена для работы с программируемыми блокамим управления шаговыми двигателями SMSD‑4.2, SMSD‑1.5 и SMSD‑9.0. Программа подает команды для управления шаговыми двигателями через Com порт персонального компьютера или USB (интерфейс RS‑232).
Программа может управлять одним, двумя или тремя шаговыми двигателями, подключенными к контроллеру SMC‑3 или одним шаговым двигателем, подключенным к блоку SMSD‑1.5, SMSD‑3.0 или SMSD‑9.0, а также осуществлять запись перечня команд (исполняемую программу) для последующего автономного использования контроллера или блока серии SMSD (без помощи ПК), либо для запуска такой исполняемой программы при помощи ПК.
Имеется возможность сохранять исполняемые программы на ПК в отдельные файлы и загружать готовые файлы в программу.
Программа имеет простой графический интерфейс, ориентированный на неподготовленного пользователя. SMC_Program не требует установки или каких-либо специальных требований к ПК. После копирования на жесткий диск ПК программа SMC_Program сразу готова к работе. При запуске программы все настойки передачи по COM‑порту подставляются автоматически, остается только выбрать номер порта, к которому подключен контроллер или блок. Для справки все параметры открытого порта указываются внизу окна программы.
В комплекте с программой SMC_Program — подробное руководство пользователя и примеры управляющих программ.
Программа имеет два режима управления:
-
Управление через панель — для максимально упрощенной работы с основными функциями контроллера или блока: движение в заданном направлении, с нужными скоростью и ускорением, перемещение на заданное число шагов или непрерывное движение, выбор полношагового или микрошагового режима работы шагового двигателя. Неуказанные параметры подставляются по умолчанию. При упрощенном управлении можно выбирать, каким (какими) из подключенных к контроллеру шаговым двигателем Вы хотите управлять в данный момент: режим позволяет быстро запустить или остановить работу одного, двух или сразу трех шаговых двигателей.
-
Расширенное ручное управление — для использования всех возможностей контроллера или блока. В этом режиме есть возможность составлять и записывать в память контроллера или блока управления исполнительную программу (алгоритм работы двигателя), синхронизировать работу нескольких шаговых двигателей, организовывать циклы. Также можно считывать исполнительную программу из памяти блока или контроллера, сохранять алгоритм работы в файл на ПК или загружать в программу ранее составленный и сохраненный в файл алгоритм. Переключение между режимами осуществляется одним кликом мыши.
Для отслеживания состояния контроллера или блока управления программа SMC_Program имеет панель индикаторов, на которой отображается текущий режим каждого из каналов контроллера или блока. Цветовая индикация соответствует светодиодам контроллера или блока.
Дополнительные справочные окна информируют пользователя о ходе работы, возникающих ошибках, начале и завершении выполнения алгоритма работы каждого из подключенных шаговых двигателей. При необходимости можно посмотреть результат отправки каждой из команд и коды ответов порта.
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
3D Printers
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью
«Как выбрать шаговый двигатель»
) в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве
биполярного шагового двигателя
, так и в качестве однополярного.
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Наконец, существуют шаговые электродвигатели, подключаемые при помощи 8-ми проводов. Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
- Последовательно соединив обмотки(увеличится индуктивное и активное сопротивление, а также момент, упадет максимальная скорость)
- Параллельно (из-за меньшей индуктивности будет меньше момент и выше скорость)
- Соединив обмотки параллельно, можно использовать униполярное подключение, как для 6-выводного шагового мотора
Источник: http://darxton.ru/wiki-article/kak-podklyuchit-shagovyy-dvigatel/
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Источник: http://asutpp.ru/shagovyy-dvigatel.html
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу
биполярных шаговых двигателей
.
Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше.
Сопротивление обмоток около 26Ом
, хотя продавец указал 14Ом.
В описании сказано, что
напряжение питания 5В
. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Источник: http://habr.com/ru/post/498788/
SegrivЗагрузка
25.07.2021
6851
55Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
Друзья, всем привет.
Меня зовут Сергей.
Давно не публиковал никаки…
Источник: http://3dtoday.ru/blogs/abs/connecting-unipolar-stepper-motor-nema-23-57hm562006-to-ramps-14/
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Источник: http://asutpp.ru/shagovyy-dvigatel.html
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Источник: http://ArduinoMaster.ru/motor-dvigatel-privod/shagovye-dvigateli-i-motory-arduino/
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Источник: http://asutpp.ru/shagovyy-dvigatel.html
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Источник: http://asutpp.ru/shagovyy-dvigatel.html
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Источник: http://avtika.ru/kak-podklyuchat-6-provodnoy-shagovyy-dvigatel/
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Источник: http://ArduinoMaster.ru/motor-dvigatel-privod/shagovye-dvigateli-i-motory-arduino/
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Источник
Источник: http://avtika.ru/kak-podklyuchat-6-provodnoy-shagovyy-dvigatel/
простой тестер шаговых РХХ: uncle_sem — LiveJournal
собрал вот сабж. для РХХ как на опелевском моновпрыске, например. вообще, такие много где ставят.
собственно, интересно данное устройство даже не для тестирования этих РХХ, а просто как девайс для управления шаговиком. потому что для промывки, допустим, нужно вначале его разобрать, а потом собрать не повредив. иногда это довольно сложно. ну а так-то всё элементарно — разобрали, в УЗ, минут 10-20 погоняли, продули, смазали, собрали — и на машину.
схема от ALMI, (C) Алексей Михеенков 1999 — 2008 (C) SMS-Software 2002 — 2008 — легко гуглится по словам «тестер РХХ ALMI»
как видим, схема элементарная, но есть нюанс. используется нога reset. следовательно если на обычном программаторе (а-ля avreal на LPT порт) вначале прошить фузы — контроллер превращается в кусок кремния — прошивку в него уже просто так не залить. только высоковольтным программатором. я прошивал на mini-pro — он хитрый и всё прошло нормально.
у автора вырублена защита по току — я всеже поставил токоизмерительные резисторы. ну и на всякий случай поставил светодиоды на выходы «error» микросхемы управления шаговиком. глядишь пригодятся когда.
плата получилась не очень хорошая, по уму надо бы кондеры тоже smd применить, плюс задумывал ставить регулятор оборотов — переменный резистор. но собрал с подстроечным (под него тоже место есть) — и даже не стал его трогать. померял сопротивление и впаял вместо него постоянный резистор на 18кОм.
надо бы еще пожалуй сделать переключатель «опель/рено» (у таких РХХ бывает разная распиновка), но для этого нужно вначале взять в руки регулятор от рено, а то я что-то не соображу какие провода перекидывать. проще, пожалуй, тупо второй разъем повесить…
так что, кому нужно — можно смело рекомендовать. схема примитивнейшая, себестоимость баксов наверно 10 получается, если всё посчитать. самая дорогая и дефицитная деталь это TLE эта, обошлась в где-то 6 баксов. тинька у меня была, так что хез сколько она сейчас стОит…
UPD: для рено нужно поменять местами провода A и C на разъеме РХХ.
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
Тестер шагового двигателя — 7320 — Autoscopeology
Шаговый двигатель — это бесщеточный синхронный электродвигатель, который может делить полный оборот на большое количество шагов. Шаговые двигатели работают иначе, чем щеточные двигатели постоянного тока, которые вращаются, когда на их клеммы подается напряжение. Для вращения каждому шаговому двигателю необходима внешняя схема управления, например микроконтроллер. С другой стороны, шаговые двигатели
фактически имеют несколько «зубчатых» электромагнитов, расположенных вокруг куска железа в форме центральной шестерни.Электромагниты получают питание от внешней цепи управления, такой как микроконтроллер.
В двухфазном шаговом двигателе существует два основных устройства намотки электромагнитных катушек: биполярное и униполярное. Униполярный шаговый двигатель имеет две катушки на фазу, по одной для каждого направления магнитного поля. Биполярные двигатели имеют по одной обмотке на фазу. Чтобы перевернуть магнитный полюс, необходимо изменить направление тока в обмотке, поэтому схема управления должна быть более сложной. На каждую фазу приходится два вывода; нет распространенных.
Все автомобильные шаговые двигатели биполярного типа.
ХАРАКТЕРИСТИКИ
-
- Электропитание: 12В
- макс., Шаговый двигатель: 1,5А (750мА на каждую обмотку)
- Регулируемый максимальный ток: 250мА; 500 мА; 750 мА
- Рабочая среда: от 0 ° C до + 50 ° C, при относительной влажности <70%
- Защита от обратной полярности
- Защита от короткого замыкания на выходе
- Защита от перегрева
ПРИМЕНЕНИЕ
-
- Проверьте состояние холостого хода (РХХ), которым заполняется шаговый двигатель.
- Очистка и смазка механизма шаговых двигателей.
- Разборка и сборка поршневого механизма.
- Ручное управление холостым ходом.
- Испытания шагового двигателя с лямбда-контролем в старых газовых системах.
В КОМПЛЕКТЕ
-
- Тестер — основной блок;
- Разъем шагового двигателя;
Как тестировать шаговые двигатели
Шаговые двигатели широко используются во многих хобби-проектах, таких как роботы и радиоуправляемые танки.Посредством серии импульсов, поступающих на двигатель, механизмом можно управлять с большой точностью. Правильный контроль со стороны пользователя зависит от правильного функционирования шаговых двигателей. С технической точки зрения это означает, что все комплекты обмоток двигателя должны быть пригодны для использования. Для обеспечения правильного функционирования шагового двигателя требуется процесс тестирования с минимальным набором оборудования и некоторой базовой информацией, относящейся к этой модели шагового двигателя.
Просмотрите спецификации. В этой документации для конкретной модели будет указано, какой вывод обеспечивает общее напряжение для всех обмоток, а какие выводы подключены к конкретным обмоткам двигателя.
Убедитесь, что жгут проводов шагового двигателя доступен. Если он уже подключен к цепи драйвера, отключите его. Независимо от того, находится ли двигатель вне коробки или снят с цепи, убедитесь, что все контакты разъема открыты, чтобы можно было проверить обмотки двигателя.
Настройте цифровой мультиметр. Следуя прилагаемым инструкциям, затем подключите измерительные провода зонда. Включите мультиметр и выберите максимально возможный диапазон сопротивления.
Проверьте каждый комплект обмоток двигателя.Вставьте один из щупов щупа в общий контактный разъем напряжения, а другой — в один из контактных разъемов обмотки. О исправности обмотки двигателя свидетельствует бесконечное значение сопротивления на дисплее цифрового мультиметра. Обычно это читается как «OL» для перегрузки. С помощью этой процедуры проверьте все остальные обмотки. Удалите провода зонда и выключите мультиметр, когда вы закончите тестировать каждую обмотку.
Управляйте шаговым двигателем со схемой драйвера. Подключите жгут проводов шагового двигателя к принимающему разъему на схеме драйвера шагового двигателя.В соответствии с инструкциями, прилагаемыми к драйверу двигателя, изменяйте ширину импульса в широком диапазоне, чтобы убедиться, что шаговый двигатель работает. Если вам нужно, чтобы двигатель был включен, чтобы продолжить его использование, оставьте его подключенным. В противном случае отсоедините его от жгута проводов, чтобы снять.
Вещи, которые вам понадобятся:
- Шаговый двигатель или двигатели
- Спецификация для конкретной модели шагового двигателя
- Схема драйвера шагового двигателя
- Цифровой мультиметр с измерительными проводами щупа
Тестер шагового двигателя
Кому
строить
степпер
мотор-тестер, схема содержит два набора драйверов, которые могут поддерживать
как униполярные, так и биполярные шаговые двигатели.Схема управления
а также
схемы драйвера находятся в отдельных источниках питания, которые могут работать на более широком
ассортимент различных источников питания двигателей.
Мотор
Драйвер может поддерживать двигатели с источниками питания от 5 В до 24 В.
The
Шаговый тестер состоит из трех основных частей: часы
генератор, последовательность фаз сигнала логики и силовой транзистор
драйверы. 3 переключателя используются в схеме для
выбор вперед / назад
движение, управление пуском и остановом двигателя, а также волновые / полноступенчатые приводы.Тестер не предусматривает полушагового привода.
схема генератора использует NE555 для подключения нестабильных мультивибратор. Частоту можно регулировать примерно от 7 Гц до 267 Гц.
Например, шаговый двигатель на 3,6 градуса будет иметь около 4,2 градуса. Обороты до 160 об / мин. Таким образом, шаговый двигатель 1,8 градуса будет иметь половину скорость вращения.
В цепи
Как показано на диаграмме, тактовый сигнал от генератора подключается к 74LS193, двоичному счетчику с повышением / понижением частоты.Когда сигнал часов
подключается к входу обратного отсчета,
он будет генерировать последовательность импульсов для шагового двигателя в
по часовой стрелке. Он будет вращаться против часовой стрелки, если
обратный отсчет используется. 74LS139 декодирует двухразрядный счетчик.
выводят и генерируют 4-фазные импульсы для управления шаговыми двигателями.
в 4-фазных клеммах соответственно.
Вождение
униполярные и биполярные шаговые двигатели одинаковы, но каждый
фаза будет попеременно пульсировать.Используются три метода
привод, но волновой привод — самый простой способ: импульс прикладывается к
каждый
клеммы катушки за раз.
Полноступенчатый привод аналогичен,
но 2 катушки находятся под напряжением одновременно. Этот метод создаст
больше крутящего момента.
Полушаг подает импульсы на
поочередно одна или две катушки. Это создаст более тонкие движения. В
полушаговый привод будет иметь удвоенное количество шагов на оборот.В качестве
в
крутящий момент неодинаков на каждом шаге, это вызовет большую вибрацию.
The Схема униполярного управления относительно проще, чем биполярный драйвер.
На схеме четыре транзистора Дарлингтона NPN используются для управления каждым клемма катушки. В волноводе одновременно включается только 1 транзистор. В полный шаг, это будет всегда должны быть включены 2 транзистора.
На схеме биполярного драйвера четыре мощности Дарлингтона NPN
транзисторы образуют
Схема H-моста для управления каждой катушкой в биполярном шаговом двигателе
мотор.Два
Драйверы H-моста
необходимы для четырехпроводного биполярного шагового двигателя. Поскольку
контроль
Схема использует 5 В (VCC), а источник питания драйвера двигателя отделен
(V + от 5V-24V), 2 дополнительных транзистора (Q13 и Q14, Q15
&
Q16)
находятся
требуется для каждого драйвера H-моста, когда напряжение питания V + больше
чем 5 В для управления шаговыми двигателями с более высоким напряжением.
На картинке показано тестирование 6-проводного шагового двигателя, который
был удален из принтера HP LaserJet III.Этот шаговый двигатель
производится компанией Japan Servo Co. Ltd., номер детали RH7-1048. это
с маркировкой 5,2 В при 1,4 А на фазу в номинальном
униполярный привод. Измеренное сопротивление составляет около 3,5 Ом на
центр
нажмите. Тестер управляет двигателем при напряжении 5В.
источник питания в
однополярный драйвер. Если в двигателе используются биполярные драйверы, сначала
рассчитать
номинальная мощность катушки. Напряжение
напряжение питания должно быть около 7 В при 1 А на фазу.
На картинке показано тестирование
для двигателя струйного принтера, который представляет собой биполярный шаговый двигатель с 4 проводами
мотор.По мотору информации нет, но следы работы принтера
Схема оценивает мощность двигателя около 12 В. Сопротивление катушки составляет
около 4,5 Ом как это
проходит испытания в блоке питания 12 В в биполярном режиме
драйверы. Многие из шаговых двигателей, используемых в принтерах, находятся под напряжением 24 В.
а также
7,5 градусов / шаг.
Тестирование 3,5-дюймового двигателя дисковода гибких дисков. Это биполярный шаговый двигатель на 5 В.
мотор.
Универсальное тестирование шаговых двигателей по доступной цене
Повысьте производительность своего оборудования и гаджетов при покупке. Тестирование шагового двигателя , который может похвастаться превосходной синхронизацией и превосходной отзывчивостью. Файл. Тестирование шагового двигателя , предлагаемые на Alibaba.com, имеют более высокий крутящий момент и низкие вибрации, поэтому они работают плавно и эффективно на низких скоростях. Независимо от того, покупаете ли вы их для своих станков с ЧПУ, 3D-принтеров, струйных принтеров или сканеров, откройте для себя. Тестирование шаговых двигателей , обеспечивающих превосходный контроль скорости и точное позиционирование.
Интернет-магазин из огромной коллекции. Испытание шагового двигателя с полюсами статора с несколькими зубьями, роторами с постоянными магнитами, 200 зубьями ротора, углами шага поворота, динамическим и высоким статическим крутящим моментом и высокой скоростью шага. Созданные лидерами отрасли, эти. Испытания шаговых двигателей являются точными, универсальными, экономичными и высоконадежными в различных условиях. Купить. Тестирование шагового двигателя с выдающейся совместимостью, номинальным крутящим моментом, стилями конструкции и размерами для различных применений.
Как ведущий интернет-магазин для. Тестирование шагового двигателя , Alibaba.com предлагает продукты, доступные с разными углами шага, размерами, конфигурациями, фазами и номинальной мощностью. Все. Тестирование шаговых двигателей. , проданные через Интернет, обладают стабильной производительностью, простотой в эксплуатации, низким уровнем отказов, высоким техническим содержанием и длительным сроком эксплуатации, а также могут применяться в различных отраслях промышленности, включая принтеры, текстильные машины, медицинские инструменты, гравировальные станки, внешнее компьютерное оборудование. и более. Эти. Испытания шаговых двигателей выпускаются в вариантах, таких как гибридные двигатели, двигатели с переменным сопротивлением и постоянные двигатели.
Магазин на Alibaba.com по разным. Тестирование шагового двигателя и его вариантов с превосходными катушками и подшипниками для повышения точности позиционирования и максимальной удельной мощности. Различные блоки поставляются с замкнутыми и разомкнутыми системами обратной связи, а также с разной длиной стека. Получите лучшие предложения, сравнивая товары, предлагаемые разными поставщиками.
Стенды для испытаний шаговых двигателей Sauter TVO-S Premium — выбор модели
Стенды для испытаний шаговых двигателей Sauter TVO-S Premium доступны в трех моделях, которые различаются по диапазонам измерения и максимальному расстоянию перемещения.Пожалуйста, смотрите таблицу ниже для получения более подробной информации.
| Код модели | Название модели |
Диапазон измерения [Макс] N |
Диапазон скоростей мм / мин |
Макс. Пройденное расстояние мм |
Размеры ШxГxВ мм |
| ТВО 500Н500С | Sauter TVO 500N500S Premium Стенд для испытаний шаговых двигателей | 500 | 1-500 | 300 | 236x428x570 |
| ТВО 1000Н500С | Sauter TVO 1000N500S Premium Стенд для испытаний шаговых двигателей | 1000 | 1-500 | 500 | 265x405x980 |
| ТВО 2000Н500С | Sauter TVO 500N500S Premium Стенд для испытаний шаговых двигателей | 2000 | 1-500 | 700 | 300x465x1185 |
Стенды для испытаний шаговых двигателей Sauter TVO-S Premium могут использоваться с различными приборами для измерения силы Sauter для проведения испытаний на сжатие и растяжение.Этот прибор может работать с датчиками силы с диапазонами до 2 кН; эти датчики можно закрепить на испытательных стендах, дополнительную информацию см. в разделе «Аксессуары».
Помимо прочной настольной конструкции, испытательные стенды для шаговых двигателей Sauter TVO-S Premium также сконструированы для надежного крепления различных испытательных приборов Sauter; как таковые эти стойки могут использоваться с массивом или зажимами, захватами и креплениями. Такая гибкость конфигурации позволяет пользователю адаптировать стенды для испытаний шаговых двигателей Sauter TVO-S Premium к конкретному применению.Возможности использования расширяются за счет большого расстояния перемещения и шагового двигателя.
Добавление шагового двигателя позволяет испытательным стендам шаговых двигателей Sauter TVO-S Premium проводить испытания на минимальной скорости с максимальной нагрузкой. Кроме того, пользователь может проводить испытания с постоянной скоростью от минимальной нагрузки до максимальной и может точно регулировать позиционирование и скорость процесса. Информация о скорости процесса отображается на дисплее, обеспечивая точную регулировку, а запуск и остановка выполняются точно на всех скоростях без перебега.
Стенды для испытаний шаговых двигателей Sauter TVO-S Premium имеют автоматический и ручной режимы работы. Пользователь может управлять испытательными стендами шаговых двигателей Sauter TVO-S Premium с панели управления премиум-класса или с помощью программного обеспечения Sauter AFH. Через панель управления премиум-класса пользователь может просматривать цифровой дисплей скорости и получать доступ к цифровой функции повтора.
Стенды для испытаний шаговых двигателей Sauter TVO-S Premium — это адаптируемые, простые в использовании и точные испытательные стенды с широким спектром применения.
Sauter TVO-S Premium Стенды для испытаний шаговых двигателей Основные характеристики
- Доступны три модели с разными диапазонами измерения и максимальным расстоянием перемещения
- Может использоваться с различными приборами для измерения силы Sauter
- Провести испытания на растяжение и сжатие
- Может работать с датчиками силы с диапазоном до 2 кН
- На стойки можно крепить датчики силы (см. «Аксессуары»).
- Прочная настольная конструкция
- Может использоваться с набором захватов, зажимов и креплений для подключения различных измерительных приборов
- Большое расстояние перемещения
- Шаговый двигатель
- Провести испытания на минимальной скорости с максимальной нагрузкой
- Провести испытания с постоянной скоростью от наименьшей до максимальной нагрузки
- Точно отрегулируйте скорость процесса, используя информацию, отображаемую на дисплее
- Точная регулировка положения
- Точный запуск и остановка испытаний на всех скоростях и без перебега
- Автоматический режим работы
- Ручной режим работы
- Управляйте испытательными стендами с панели управления премиум-класса или с помощью программного обеспечения Sauter AFH
- Цифровой индикатор скорости
- Функция цифрового повтора
- Адаптируемые, простые в использовании и точные испытательные стенды с широким спектром применения
Что включено?
- Стенд для испытаний шагового двигателя премиум-класса Sauter TVO-S на ваш выбор
Принадлежности
Для испытательных стендов шаговых двигателей Sauter TVO-S Premium доступен ряд принадлежностей.Для получения дополнительной информации или добавления элемента, указанного ниже, в заказ, пожалуйста, свяжитесь с нашим отделом продаж перед покупкой.
| Код товара | Название продукта |
| фунт 300-2 | Sauter LB 300-2 Цифровой измеритель длины / расстояния штангенциркуля |
| AFH FGT | Программное обеспечение для передачи данных Sauter для повторных испытаний |
| AFH БЫСТРО | Программное обеспечение Sauter для высокоскоростной передачи данных для измерения силы и времени |
| AFH-FD | Программное обеспечение для анализа силы-смещения Sauter |
| LB-A02 | Установка Sauter LB 300-2 на испытательный стенд шагового двигателя Sauter TVO-S Premium (НЕОБХОДИМО ЗАКАЗАТЬ ВО ВРЕМЯ ПОКУПКИ) |
| LD-X | Линейный потенциометр Sauter LD — выбор моделей |
| LD-A06 | Установка Sauter LD на испытательный стенд шагового двигателя Sauter TVO-S Premium (НЕОБХОДИМО ЗАКАЗАТЬ ВО ВРЕМЯ ПОКУПКИ) |
| AFH LD | Программное обеспечение Sauter для передачи данных смещения силы (для использования в сочетании с линейными потенциометрами Sauter LD) |
| TVO-A01 | Крепление Sauter для приборов измерения силы |
Easy Stepper — RepRap
Easy StepperСтатус релиза: Работает
Это драйвер для вашего шагового драйвера.
Обратите внимание, что Easy Stepper не поставляется с шаговым драйвером или шаговым двигателем.
Это одновременно тестер шагового двигателя и тестер шагового драйвера.
Это также инструмент, когда вы создаете какое-либо устройство, включающее шаговые двигатели, или игрушку для игры с частями шагового двигателя, которые вы извлекли из старого оборудования.
Идея
Идея состоит в том, чтобы создать быстрый и простой инструмент для тестирования шаговых двигателей и механических узлов, таких как редукторы с шаговым приводом и линейные активаторы.
Просто подключите любой источник питания (от 8 до 24 В, переменного или постоянного тока), который у вас есть, к винтовым клеммам или разъему цилиндрического гнезда и любому шаговому приводу, который у вас есть, к штыревому разъему выхода двигателя или винтовой клемме, и вы готовы идти.
Мотивация
Причиной этого проекта было мое разочарование по поводу того, сколько времени нужно, чтобы просто протестировать простой шаговый двигатель.
Для тестирования шагового двигателя вам обычно нужен какой-то микроконтроллер, скорее всего, Arduino, макетная плата, кабели, какой-то драйвер и другие компоненты.
Когда вы собрали все это, вам все равно нужно написать и загрузить некоторый код для запуска драйвера, но прежде чем вы сможете это сделать, вам также нужно найти USB-кабель, и если код не работает, вы должны его отладить.
Все это может легко занять час, но с Easy Stepper вы просто подключаете свой шаговый двигатель и любой источник питания, и вы готовы к работе.
Как подключиться
Первое заявление об отказе от ответственности:
Существует множество руководств и блогов, в которых рассказывается, какой именно цвет провода подключается к тому, что находится в шаговом двигателе, и к вашему шаговому драйверу.
Но не существует международного стандарта в отношении окраски проводов для шаговых двигателей, поэтому окраска проводов зависит от того, на что было похоже производство отдельных шаговых двигателей.
Это означает, что комбинация цветов на шаговом двигателе от одного производителя не обязательно соответствует цветовой комбинации на шаговом двигателе от другого производителя.
По этой причине мы решили не использовать цвета в этом описании.
Биполярный шаговый двигатель — это наиболее часто используемый шаговый двигатель в наши дни и самый простой тип для подключения к Easy Stepper.
Биполярный шаговый двигатель состоит из двух катушек (фазы A и B)
Середина двух катушек внутри 5-проводного однополярного шагового двигателя внутренне соединена и выведена одним проводом в качестве пятого провода. . (C1 + 2)
Насколько нам известно, не существует 5-проводного однополярного шагового двигателя, совместимого с Easy Stepper, поэтому не пытайтесь подключить 5-проводный однополярный шаговый двигатель к Easy Stepper, поскольку вы можете повредить его. драйвер шагового двигателя, который вы используете.
6-проводный униполярный шаговый двигатель отличается от 5-проводного униполярного шагового двигателя тем, что середина двух катушек не соединена внутри, а вместо этого выведена как два отдельных провода (C1 и C2)
Если вы отрежьте или просто изолируйте концы этих двух проводов и оставьте их, вы можете подключить оставшиеся 4 провода от 6-проводного шагового двигателя, как если бы это был 4-проводный биполярный шаговый двигатель.
С 8-проводным однополярным шаговым двигателем все начинает усложняться, и существуют разные способы их изготовления, но вот два примера.
Мы рекомендуем вам соединить 4 катушки по две последовательно и тем самым превратить его в четырехпроводную двухполюсную схему.
Вы также можете подключить 4 катушки по две параллельно и тем самым уменьшить индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток.
Однако большинство драйверов шаговых двигателей активно ограничивают выходной ток по фазе, и вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек.
Управление
Управление действительно простое.
Когда потенциометр отцентрован, шаговый двигатель остановится.
Когда потенциометр поворачивается по часовой стрелке, шаговый двигатель начинает вращаться в одном направлении.
Чем дальше вы поворачиваете потенциометр, тем быстрее вращается двигатель, а когда вы поворачиваете потенциометр назад, шаговый двигатель снова замедляется.
Когда вы повернете потенциометр против часовой стрелки мимо центра, шаговый двигатель начнет вращаться в другом направлении.
Две кнопки предназначены для быстрой перемотки вперед и назад.
С помощью перемычек MS1-2-3 вы можете установить разрешение микрошага на Polulu / Stepstick.
Паяльная перемычка Use-Enable не должна использоваться со стандартной прошивкой.
Данные
Вход: от 8 до 24 В переменного / постоянного тока
Выход: зависит от Pololu / Stepstick и источника питания, который вы используете.
Размер: 40X60 мм
MCU: Attiny10-TSHR — 8 бит — 12 МГц
Исходный код: Файл: EasyStepper v1.застегивать
Совместимость Pololu / Stepstick
Easy Stepper совместим с большинством pololu / Stepstick
Существует много различных версий драйверов шагового двигателя, и важно правильно сориентировать драйвер шагового двигателя в Easy Stepper, поэтому обязательно проверьте, как сориентировать тот, который вы используете.
Вот несколько примеров.
Некоторые новые драйверы шагового двигателя, такие как RAPS 128, с шагом 1/128 микрошага, не имеют инвертированного входного сигнала на контакте Enable.Это означает, что для работы шагового драйвера необходимо подтянуть вывод Enable к 5В, а не к GND.
Это можно сделать, подключив напряжение 5 В напрямую к контакту Enable на Easy Stepper или самом драйвере шагового двигателя.
Выполнение этого на Easy Stepper сделает его несовместимым с обычными шаговыми драйверами (до тех пор, пока не будут возвращены обратно), поэтому я рекомендую делать это на шаговом драйвере.
Перепрограммирование прошивки
Вы можете перепрограммировать Easy Stepper через порт программирования на задней стороне Easy Stepper.
Easy Stepper не основан на стандартной настройке интернет-провайдера Atmel, но основан на программном интерфейсе Atmel TPI, дополнительную информацию можно найти здесь:
[http://www.atmel.com/Images/doc8373.pdf Atmel Tiny Programming
Интерфейс (TPI)]
Для программирования Easy Stepper я использую программатор AVRISP mkII: AVRISP MKII
Есть и другие способы программирования ATtiny.
Взгляните на этот пост на Hackaday, чтобы узнать, как это можно сделать.
Где взять
Easy Stepper на RepRap.меня
История развития
Схема печатной платы
Схема PCB основана на Sick of Beige PCB от Dangerous Prototypes, но размер, который я хотел, не был в библиотеке, поэтому я сделал свою собственную версию библиотеки с шагом 10 мм от 20X20 мм до 150X150 мм с обоими без покрытия. и металлические монтажные отверстия.
Загрузите библиотеку Eagle здесь: <{File: Dp pcb-All sizes.zip}>
Ред. 1
Файл: Easy Stepper Motor Control.sch.pdf
3-й прототип
Итак, я на собственном опыте выяснил, что если вы вставите степстик неправильно, вы запустите его и ATtiny10 на Easy Stepper.
Я не думаю, что есть способ защитить шаговую палку / пололу, но в настоящее время я работаю над способом защиты Easy Stepper.
2-й прототип
1-й прототип
Печатная плата для 1-го прототипа изготовлена на фрезерном станке LPKF Protomat C60 PCB в Лабитате.
4.3. Настройка и тестирование шагового двигателя
В этом разделе объясняется, как настроить и протестировать двигатель через USB с помощью программного обеспечения Tic Control Center. Это хорошая идея — протестировать двигатель через USB, как это, чтобы убедиться, что двигатель работает и что вы можете получить от него желаемую производительность, прежде чем подключать другой тип входа к Tic и пытаться использовать его для управления. мотор.
Если вы изменили какие-либо настройки вашего Tic, вам, вероятно, следует сбросить Tic до настроек по умолчанию, открыв меню «Устройство» и выбрав «Восстановить настройки по умолчанию».Затем перейдите на вкладку «Вход и настройки двигателя» и убедитесь, что «Режим управления» установлен на «Последовательный / I²C / USB» (по умолчанию).
Настройки мотора Tic можно найти в поле «Мотор». На этом снимке экрана показаны настройки по умолчанию для Tic T825:
.| Настройки двигателя по умолчанию для Tic T825. |
|---|
Различные модели Tic имеют разные доступные ступенчатые режимы, ограничения тока и режимы затухания. Tic T249 имеет дополнительные настройки для настройки функции Active Gain Control (AGC), а Tic 36v4 имеет дополнительные настройки, которые управляют различными параметрами синхронизации драйвера, как описано в Разделе 6.
Установка ограничения тока
Предполагая, что вы не ограничены Tic или вашим источником питания, мы рекомендуем установить ограничение тока Tic на номинальный ток вашего двигателя. Вы должны убедиться, что текущий предел не превышает того, что Tic может доставлять непрерывно, как показано в этой таблице.
| Тик T500 Тик T834 Тик T825 |
Тик T249 | Тик 36v4 | |
|---|---|---|---|
| Постоянный ток на фазу: | 1500 мА | 1800 мА | 4000 мА |
Кроме того, убедитесь, что предел тока не превышает половины номинального тока источника питания вашего двигателя (хотя это не всегда необходимо, и более высокий предел тока может работать, как описано в разделе 4.1). Вы также должны убедиться, что настроенный предел тока Tic никогда не превышает номинальный ток вашего шагового двигателя.
Предел тока указывается в Центре управления Tic в единицах миллиампера (мА), которые составляют одну тысячную часть ампера (ампера). Поэтому, если вы хотите установить ограничение по току на 0,9 А, введите «900» в поле «Ограничение по току». Обратите внимание, что текущий предел может быть установлен только на определенные конкретные значения. После того, как вы введете текущий предел, центр управления будет использовать ближайший допустимый параметр, который меньше или равен введенному вами текущему пределу.Вы можете использовать стрелки вверх и вниз для просмотра действительных текущих настроек ограничения. Различные модели Tic имеют разные наборы допустимых пределов тока.
Предупреждение Tic 36v4: Tic 36v4 не имеет значимого отключения при перегреве (в то время как IC драйвера затвора имеет защиту от перегрева, в первую очередь перегреваются внешние полевые МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать настройку предельного тока выше 4000 мА (или ниже в приложениях с пониженным тепловыделением), если вы сначала не подтвердите, что температура полевых МОП-транзисторов будет оставаться ниже 140 ° C.По умолчанию Tic не позволит вам установить ограничение по току выше 4000 мА, но вы можете отменить это, если установите флажок «Включить неограниченные ограничения по току».
Первое испытание двигателя
После установки текущего лимита нажмите «Применить настройки». Внизу окна должно быть сообщение «Двигатель обесточен из-за нарушения безопасного пуска. Чтобы начать, нажмите «Возобновить» ». Нажмите зеленую кнопку «Возобновить», чтобы включить шаговый двигатель. Если все пойдет хорошо, выбранный вами ток начнет протекать через катушки, а сообщение в нижней части экрана должно измениться на «Вождение».
Если ваш блок питания не может обеспечить достаточный ток, его напряжение может упасть, когда вы нажмете кнопку «Возобновить». Tic обнаружит, что VIN слишком низкий, сообщит об ошибке «Low VIN» и обесточит двигатель. Порог низкого VIN для каждого тика показан в этой таблице.
| Тик T834 | Tic T500 | Тик T249 | Тик 36v4 | Тик T825 | |
|---|---|---|---|---|---|
| Низкий порог VIN: | 2,1 В | 3.0 В | 5,5 В | 5,8 В | 7,0 В |
Если это происходит в вашей системе, вы увидите, что Tic на короткое время приводит в движение двигатель, а затем переключается обратно в предыдущее состояние, когда двигатель обесточен из-за нарушения безопасного пуска. Вы также можете посмотреть на вкладке «Статус», не произошла ли ошибка «Низкий VIN»: счетчик рядом с этой ошибкой будет отличным от нуля и увеличиваться каждый раз, когда вы нажимаете «Возобновить». Если напряжение вашего источника питания около 2.От 1 В до 2,3 В или падает до этого уровня, когда двигатель находится под напряжением, Tic T834 может сообщить об ошибке «Драйвер двигателя» (вызванной ошибкой блокировки пониженного напряжения DRV8834) без сообщения об ошибке «Низкий VIN». Недостаточный источник питания также может вызвать другие проблемы, такие как нарушение связи USB или сброс тика. Если в вашей системе возникают подобные проблемы, вам следует попробовать получить более качественный источник питания или снизить предел тока, чтобы решить эти проблемы, прежде чем продолжить.
Затем перейдите на вкладку «Статус» и используйте интерфейс «Установить цель» в нижней части этой вкладки, чтобы дать команду двигателю перейти в различные целевые положения.Если установлен флажок «Установить цель при изменении ползунка или поля ввода», вы можете перемещать шаговый двигатель, просто перетаскивая полосу прокрутки. Вы должны убедиться, что ваш шаговый двигатель может вращаться в обоих направлениях. Если шаговый двигатель вращается неправильно, выключите двигатель, проверьте все соединения (и паяные соединения, если применимо) и повторите попытку.
Проверка нагрева
После того, как вы заставили свой двигатель двигаться, вы можете дать ему немного постоять, чтобы посмотреть, насколько сильно нагреваются мотор и Tic.В отличие от двигателя постоянного тока, шаговые двигатели потребляют энергию и выделяют тепло, когда они не двигаются. После того, как ваша система нагреется и перейдет в устойчивое состояние, если двигатель или Tic будут более горячими, чем вы хотели бы, вы можете подумать о снижении предела тока.
Предупреждение: Этот продукт может стать достаточно горячим, чтобы обжечься задолго до того, как чипы перегреются. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Настройка пошагового режима
Параметр «Пошаговый режим» управляет разрешением микрошага Tic.В режимах «Полный шаг» и «Полный шаг 100%» через обе катушки всегда протекает одинаковое количество тока, и каждый раз, когда Tic делает шаг, он меняет направление тока в одной из катушек. В полношаговом режиме существует только четыре возможных состояния тока катушки, как показано на диаграмме ниже, и если в документации вашего двигателя указано, что он имеет 200 шагов на оборот, это означает, что для поворота на 360 градусов требуется 200 из этих полных шагов.
| Допустимые переходы тока катушки в полношаговом режиме.Стрелки вправо соответствуют одному направлению вращения двигателя, а стрелки влево — другому. |
|---|
Другой способ визуализировать это — построить график токов катушки для каждого из четырех полных шагов, где одна ось представляет ток фазы (или катушки) A, а другая ось представляет ток фазы B. Для режима «Полный шаг», когда каждая катушка всегда имеет примерно 70% настроенного ограничения тока, этот график выглядит следующим образом:
| Токи катушек для четырех (4) ступеней, составляющих полношаговый режим (I 1-4 ). |
|---|
В других доступных пошаговых режимах Tic использует микрошаги вместо полных шагов для генерации магнитных полей, указывающих на места между полными шагами. Каждый микрошаг соответствует 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 или 1/256 полного шага, в зависимости от того, какой режим шага вы выберете. Например, если вы выберете 1/32, то потребуется 32 микрошага, чтобы переместиться на такое же расстояние, как один полный шаг, а двигателю с 200 шагами на оборот потребуется 6400 микрошагов для поворота на 360 градусов.На следующем графике показаны токи катушки для каждого из микрошагов в 1/4 ступенчатом режиме:
| Токи катушки для 16 микрошагов, составляющих 1/4 ступенчатый режим (I 1-16 ). |
|---|
На приведенном выше графике токи I 3 , I 7 , I 11 и I 15 соответствуют четырем токам полного шага, где величина тока через обе катушки равна . Все остальные шаги указывают между этими полными шагами, устанавливая разные пределы тока для двух катушек.Самый экстремальный пример этого происходит на этапах I 1 , I 5 , I 9 и I 13 , где ток через одну катушку равен настройке полного ограничения тока на Tic, в то время как ток через другую катушку — ноль.
- Tic T500 поддерживает только режимы полного, 1/2, 1/4 и 1/8 шага.
- Tic T825 Tic T834 и Tic T249 поддерживают полные, 1/2, 1/4, 1/8, 1/16 и 1/32 ступенчатые режимы.
- Tic T249 поддерживает режим «Полный шаг 100%» вместо обычного полношагового режима , а также дополнительно поддерживает режим «1/2 шага 100%». В этих двух режимах «100%» любой ненулевой ток катушки составляет 100% от номинального тока вместо 70% (как в нормальном режиме полного и 1/2 шага). Эти режимы иногда называют «некруглыми».
- Tic 36v4 поддерживает полные, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 и 1/256 ступенчатые режимы.
Значения скорости, скорости, ускорения и замедления Tic выражаются в микрошагах, которые также называются импульсами. Следовательно, если вы измените пошаговый режим, вам, возможно, придется изменить эти другие параметры, чтобы учесть это изменение. Например, максимальная скорость по умолчанию для Tic составляет 200 импульсов в секунду. Если вы измените пошаговый режим с полного шага на полушаговый, вам придется изменить скорость до 400 импульсов в секунду, чтобы сохранить ту же угловую скорость изменения.Поскольку пошаговый режим влияет на эти другие параметры, рекомендуется сначала установить его.
Установка режима затухания (только T825, T834 и 36v4)
Tic T825, Tic T834 и Tic 36v4 имеют настройку режима затухания, которая влияет на скорость затухания тока через катушки двигателя во время каждого шага.
- Tic T825 имеет три режима затухания: медленный, смешанный (по умолчанию) и быстрый.
- Tic T834 имеет пять режимов затухания: медленный, смешанный 25%, смешанный 50% (по умолчанию), смешанный 75% и быстрый.
- Tic 36v4 имеет шесть режимов затухания: медленный, медленный / смешанный, быстрый, смешанный, медленный / автосмешивание и автосмешивание (по умолчанию).
Режим затухания имеет наибольшее значение при использовании микрошага. Какой режим спада является наиболее подходящим, зависит от многих факторов, характерных для конкретной системы шагового двигателя, включая сопротивление и индуктивность двигателя, подаваемое напряжение двигателя и желаемую скорость. Как правило, использование медленного затухания генерирует меньше электрического и звукового шума, но может привести к пропущенным микрошагам при уменьшении тока катушки.Быстрое затухание намного более шумно как электрически, так и слышимо, но создает более равномерные микрошаги. Смешанное затухание — это комбинация быстрого и медленного затухания, которая пытается минимизировать шум, сохраняя при этом микрошаги как можно более равномерными. Для получения дополнительной информации о режимах затухания и методах управления током драйвера шагового двигателя Tic, обратитесь к таблице данных DRV8825 (перенаправление 1k) для Tic T825 или таблице данных DRV8834 (перенаправление 1k) для Tic T834.
Tic 36v4 по умолчанию настроен на использование автоматического смешивания затухания.В этом режиме драйвер автоматически выбирает медленное или быстрое затухание в зависимости от фактического тока двигателя. Он сочетает в себе некоторые преимущества медленного и быстрого затухания, и он должен хорошо работать в большинстве ситуаций, но вы можете выбрать другой режим затухания, если автосмешивание не оптимально для вашей системы. Режимы затухания с косой чертой (/) обозначают различное поведение для шагов увеличения и уменьшения тока; например, настройка «Медленный / смешанный» использует медленное затухание для шагов, когда ток увеличивается, и смешанное затухание, когда ток уменьшается.Для получения дополнительной информации о режимах затухания Tic 36v4, а также о дополнительных настройках временных параметров, которые могут повлиять на их работу, обратитесь к его таблице данных драйвера затвора DRV8711 (перенаправление 1k) и к Разделу 6.
Режим затухания Tic T500 не настраивается. Tic T500 имеет автоматический выбор режима затухания с использованием внутреннего измерения тока для автоматической настройки режима затухания по мере необходимости, чтобы обеспечить наиболее плавную форму волны тока. Для получения дополнительной информации см. Техническое описание MP6500 (1 МБ pdf).
Режим затухания Tic T249 не настраивается. Tic T249 оснащен технологией Toshiba Advanced Dynamic Mixed Decay (ADMD), которая динамически переключается между режимами медленного и быстрого затухания в зависимости от фактического тока двигателя, обеспечивая более высокую эффективность и более плавные шаги на высокой скорости, чем при традиционном смешанном затухании на основе времени. Для получения дополнительной информации см. Техническое описание TB67S249FTG (533 КБ, pdf).
Настройка активного контроля усиления (только T249)
Микросхема TB67S249FTG на Tic T249 поддерживает функцию Toshiba Active Gain Control (AGC), которая автоматически снижает ток шагового двигателя ниже установленного предела в зависимости от фактической нагрузки на двигатель, что позволяет снизить ненужное тепловыделение и повысить пиковую мощность, когда мотору это действительно нужно.Функция AGC отключена по умолчанию, но вы можете включить ее и настроить с помощью параметров AGC на вкладке «Вход и настройки двигателя». Для получения дополнительной информации об этих настройках см. Раздел 6.
Установка параметров движения
После того, как вы установили шаговый режим двигателя, ограничение тока, режим затухания и настройки АРУ (если применимо), вы должны установить его максимальную скорость и максимальное ускорение.
Tic представляет скорости (неотрицательные значения, указывающие величину скорости), скорости (значения со знаком, указывающие скорость и направление) и ограничения скорости в единицах импульсов (микрошагов) за 10 000 (десять тысяч) секунд.Tic может отправлять до 50 000 импульсов (микрошагов) в секунду, поэтому максимально допустимая скорость составляет 500 000 000. Однако ваш мотор может не двигаться так быстро. Если вы хотите получить максимальную возможную скорость от вашего двигателя, вам, возможно, придется провести несколько тестов, чтобы увидеть, насколько быстро он может работать. Для этого установите максимальную скорость на 500 000 000 в «Настройки входа и двигателя» и нажмите «Применить настройки». Затем перейдите в поле «Установить цель» на вкладке «Статус», выберите «Установить скорость» и введите меньшие числа в поля на концах полосы прокрутки, определяющие ее диапазон.Например, попробуйте ввести -4 000 000 и 4 000 000, что будет означать, что полоса прокрутки может устанавливать целевые скорости от -400 импульсов в секунду до +400 импульсов в секунду, как показано ниже.
| Поле «Установить цель» в Центре управления Tic с диапазоном, установленным на плюс или минус 400 импульсов в секунду. |
|---|
Попробуйте медленно перетащить полосу прокрутки к обоим концам ее диапазона. Если ваш двигатель может развивать желаемую скорость без пауз или пропусков, вы можете увеличить диапазон полосы прокрутки и попробовать еще раз.Поэкспериментировав с полосой прокрутки скорости, вы сможете понять, на что способен ваш двигатель. Как только вы это сделаете, вернитесь на вкладку «Вход и настройки двигателя» и установите «Макс. Скорость» соответствующим образом.
Вероятно, вам также придется отрегулировать параметр «Максимальное ускорение». Tic представляет пределы ускорения и замедления в единицах импульсов в секунду за 100 секунд. Пределы ускорения и замедления определяют, насколько скорость (в единицах 10 000 импульсов в секунду) может увеличиваться или уменьшаться за одну сотую секунды (0.01 с или 10 мс). Чтобы установить предел ускорения, вы можете подумать, сколько времени вы хотите, чтобы Tic тратил на ускорение от состояния покоя до полной скорости. Если вы хотите, чтобы это занимало одну секунду, установите максимальное ускорение равным одной сотой максимальной скорости.
В отличие от двигателя постоянного тока, который сам по себе разгоняется до некоторой максимальной скорости при подаче напряжения, скорость шага должна постепенно увеличиваться контроллером, если вы хотите достичь высоких максимальных скоростей. Если вы просто резко перескочите на высокую скорость шага, инерция неподвижного ротора помешает ему успевать за вращающимся магнитным полем, и он останется позади; в результате он просто будет сидеть на месте или будет вибрировать на месте (или, возможно, даже начнет двигаться назад).Параметр максимального ускорения Tic ограничивает скорость увеличения шага, что при правильной настройке даст ротору время, чтобы успевать за магнитным полем, поскольку он вращается все быстрее и быстрее (до некоторой максимальной скорости, которая в конечном итоге является функцией вашего конкретного шагового двигателя, а также настройки ограничения тока, напряжения питания и нагрузки на выходе шагового двигателя).
По умолчанию предел замедления Tic совпадает с пределом ускорения. Если вы хотите, чтобы скорость замедления была другой, вы можете снять флажок «Использовать ограничение максимального ускорения для замедления».
Параметр «Начальная скорость» указывает скорость, ниже которой пределы замедления и ускорения не соблюдаются.
