Как правильно использовать функцию delay() в Arduino Mega для управления шаговым двигателем. Какие существуют альтернативные методы создания задержек в Arduino-проектах. Как оптимизировать код для эффективной работы с длительными интервалами времени.
Особенности использования функции delay() в Arduino Mega
Функция delay() является одним из базовых инструментов программирования Arduino для создания временных задержек. Однако при работе с длительными интервалами времени возникает вопрос о ее эффективности и ограничениях.
Каковы основные характеристики функции delay() в Arduino Mega?
- Использует тип данных unsigned long (32 бита)
- Максимальное значение аргумента: 4,294,967,295 миллисекунд
- Максимальная продолжительность задержки: около 49 дней
- Является блокирующей функцией, останавливающей выполнение основного кода
Ограничения delay() при управлении шаговым двигателем
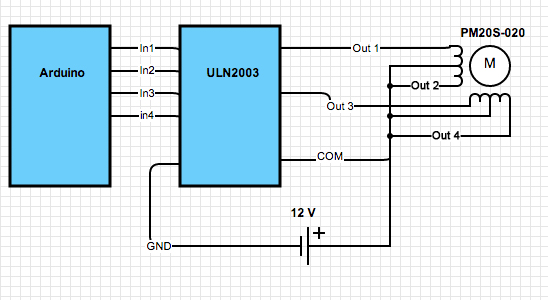
При разработке драйвера для биполярного шагового двигателя с использованием Arduino Mega 2560 и драйвера DRV8825 возникают определенные сложности с длительными задержками. Почему использование delay() может быть проблематичным в таких проектах?
- Блокирует выполнение остального кода во время задержки
- Не позволяет обрабатывать другие события или сигналы
- Может привести к пропуску важных изменений состояния системы
- Усложняет реализацию многозадачности
Альтернативные методы создания задержек в Arduino-проектах
Учитывая ограничения функции delay(), разработчики часто ищут альтернативные способы организации временных интервалов. Какие методы позволяют создавать эффективные задержки без блокировки основного кода?
- Использование функции millis() для неблокирующих задержек
- Применение аппаратных таймеров Arduino
- Создание собственных функций управления временем
- Использование библиотек для работы со временем, например, TimeLib
Неблокирующие задержки с помощью millis()
Функция millis() возвращает количество миллисекунд, прошедших с момента запуска Arduino. Как использовать millis() для создания неблокирующих задержек?
unsigned long previousMillis = 0;
const long interval = 5000; // интервал в 5 секунд
void loop() {
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
// Выполнение действий каждые 5 секунд
}
// Остальной код выполняется без блокировки
}
Оптимизация кода для работы с длительными интервалами времени
При разработке систем, требующих длительных интервалов работы и ожидания, важно оптимизировать код для эффективного использования ресурсов Arduino. Какие приемы помогут улучшить производительность проекта?
- Использование переменных типа unsigned long для подсчета времени
- Применение циклов с проверкой условий вместо длинных задержек
- Реализация конечных автоматов для управления состояниями системы
- Оптимизация алгоритмов управления шаговым двигателем
Пример реализации длительных интервалов без delay()
unsigned long motorStartTime = 0;
const unsigned long motorRunTime = 300000; // 5 минут
const unsigned long motorStopTime = 120000; // 2 минуты
bool isMotorRunning = false;
void loop() {
unsigned long currentTime = millis();
if (isMotorRunning) {
if (currentTime - motorStartTime >= motorRunTime) {
stopMotor();
isMotorRunning = false;
motorStartTime = currentTime;
}
} else {
if (currentTime - motorStartTime >= motorStopTime) {
startMotor();
isMotorRunning = true;
motorStartTime = currentTime;
}
}
// Другие операции, выполняемые параллельно
}
Использование прерываний для точного управления временем
Прерывания позволяют Arduino реагировать на события в реальном времени, не зависимо от выполнения основного кода. Как можно применить прерывания для управления шаговым двигателем?
- Настройка таймера для генерации прерываний с заданной частотой
- Использование внешних прерываний для реакции на сигналы датчиков
- Комбинирование прерываний с неблокирующими методами задержек
Пример использования прерывания таймера
#include <TimerOne.h>
void setup() {
Timer1.initialize(100000); // Инициализация таймера с периодом 100000 микросекунд
Timer1.attachInterrupt(timerISR); // Привязка функции прерывания
}
void timerISR() {
// Код для управления шаговым двигателем
}
void loop() {
// Основной код программы
}
Энергоэффективность при длительной работе Arduino Mega
При разработке проектов с длительными циклами работы важно учитывать энергопотребление системы. Как можно оптимизировать энергоэффективность Arduino Mega при управлении шаговым двигателем?
- Использование режимов сна Arduino для экономии энергии
- Оптимизация частоты работы процессора
- Применение энергоэффективных алгоритмов управления двигателем
- Использование внешних компонентов для управления питанием
Пример использования режима сна
#include <avr/sleep.h>
#include <avr/power.h>
void setup() {
// Настройка пинов и периферии
}
void loop() {
// Выполнение необходимых операций
// Переход в режим сна
enterSleep();
}
void enterSleep() {
set_sleep_mode(SLEEP_MODE_PWR_DOWN);
sleep_enable();
sleep_mode();
// После пробуждения выполнение продолжится отсюда
sleep_disable();
}
Обработка ошибок и контроль состояния системы
При работе с длительными циклами важно обеспечить надежность системы и корректную обработку возможных ошибок. Какие методы помогут повысить устойчивость проекта управления шаговым двигателем?
- Реализация системы логгирования событий
- Использование сторожевого таймера (watchdog) для предотвращения зависаний
- Обработка исключительных ситуаций и ошибок связи с драйвером DRV8825
- Реализация механизмов самодиагностики и восстановления работоспособности
Пример использования сторожевого таймера
#include <avr/wdt.h>
void setup() {
wdt_enable(WDTO_8S); // Включение сторожевого таймера с таймаутом 8 секунд
}
void loop() {
// Выполнение основных операций
wdt_reset(); // Сброс сторожевого таймера
}
Использование Arduino Mega для управления шаговым двигателем с длительными циклами работы требует тщательного планирования и оптимизации кода. Применение альтернативных методов создания задержек, эффективное использование прерываний и внимание к энергопотреблению позволяют создать надежную и эффективную систему управления. Реализация механизмов обработки ошибок и контроля состояния обеспечивает устойчивость проекта в долгосрочной перспективе.
Разработка драйвера для биполярного шагового двигателя на базе Arduino Mega 2560 и DRV8825 открывает широкие возможности для создания точных и надежных систем позиционирования. Правильный выбор методов программирования и оптимизация алгоритмов управления позволяют добиться высокой производительности и стабильности работы даже при длительных циклах эксплуатации.
arduino mega — Максимальное время задержки
спросил
Изменено 5 лет, 2 месяца назад
Просмотрено 9к раз
Я разрабатываю драйвер для биполярного шагового двигателя, используя Arduino Mega 2560 и драйвер шагового двигателя DRV8825.
В моем приложении шаговый двигатель (Nema 24) работает 5 минут и останавливается на 2 минуты. У меня есть сомнения относительно того, на какое максимальное время Arduino Mega может задержать процесс или на какое максимальное время
delay() функция будет длиться или работать в программировании?
- ардуино-мега
- степпер
0
Примечание: здесь есть существующий вопрос, который следует закрыть как дубликат, но его трудно найти. Так что, пока кто-нибудь не найдет его…
Так что, пока кто-нибудь не найдет его…
Функция delay() Arduino создает блокирующую задержку на заданное количество миллисекунд. Аргумент unsigned long , который на 16-битном Arduino представляет собой 32-битный целочисленный тип без знака, имеющий максимальное значение 4 294 967 295. Поскольку это миллисекунды, максимальное значение delay() будет равно 4 294 967,295 секунд или около 49 дней.
Однако вы можете легко добиться более длительных задержек, используя переменные подсчета для подсчета экземпляров более коротких задержек. В крайнем случае, используя доступную память для отслеживания такого подсчета, вы можете легко добиться теоретических задержек, превышающих возраст Вселенной.
Обратите внимание, что функция Arduino delay() блокирует , что означает, что во время нее не выполняется ничего (кроме прерываний и аппаратных периферийных устройств на кристалле). Это часто нежелательно. Более полезным решением может быть создание цикла, который занимает, скажем, 20 миллисекунд, в результате
Более полезным решением может быть создание цикла, который занимает, скажем, 20 миллисекунд, в результате delay() и нескольких вспомогательных операций, а затем запускать его снова и снова во время подсчета. Или вы можете сделать 1-секундный цикл или что вы выберете.
или работаешь в программировании?
, это зависит от вашего кода. вы можете легко расширить его диапазон за пределы числа, предложенного ранее.
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
rosserial_arduino/tutorials/time%20and%20tf — ROS Wiki
| Пожалуйста, смотрите EditingTheWiki для получения рекомендаций по организации нашей вики и советов по созданию новых страниц. |
Пакет ROS или стек
Если вы создаете начальную страницу для стека или пакета, присвойте этой странице то же имя, что и самому стеку или пакету, и используйте один из следующих шаблонов:
Если вы создаете дополнительную документацию для пакета или стека, не стесняйтесь структурировать ее по своему усмотрению, но, пожалуйста, держите ее в пределах пространства имен вашего пакета (например, «ros.org/wiki/my_package/more_details») Создать новую пустую страницу
Учебные пособия
Для систематизации учебных пособий в каждой стопке и пакете есть ссылка на учебные пособия в нижней части страницы. Если вы попали сюда по этой ссылке, начните список руководств с этим шаблоном:
-
TutorialIndexTemplate
После сохранения этой страницы на ней будет кнопка «Создать руководство», которую вы можете использовать для создания новых страниц руководств.
