Какие бывают типы электродвигателей. Чем отличаются двигатели постоянного и переменного тока. Каковы особенности синхронных и асинхронных двигателей. Где применяются различные виды электродвигателей.
Основные типы электродвигателей
Электродвигатели классифицируются по нескольким основным параметрам:
- По роду тока: постоянного и переменного тока
- По числу фаз: однофазные, двухфазные, трехфазные
- По принципу действия: синхронные и асинхронные
- По конструкции ротора: с короткозамкнутым и фазным ротором
- По назначению: общепромышленные, крановые, тяговые и др.
Рассмотрим подробнее основные виды электродвигателей и их особенности.
Двигатели постоянного тока
Двигатели постоянного тока работают от источника постоянного напряжения. Их основные преимущества:
- Высокий пусковой момент
- Широкий диапазон регулирования скорости
- Линейные механические характеристики
Среди недостатков можно отметить наличие коллекторно-щеточного узла, требующего обслуживания. Применяются в электротранспорте, станках, роботах.

Какие бывают двигатели постоянного тока?
Различают следующие типы двигателей постоянного тока:
- С независимым возбуждением
- С параллельным возбуждением
- С последовательным возбуждением
- Со смешанным возбуждением
Двигатели переменного тока
Двигатели переменного тока работают от источника переменного напряжения. Они более просты по конструкции и надежны в эксплуатации по сравнению с двигателями постоянного тока.
Асинхронные двигатели
Асинхронные двигатели — наиболее распространенный тип электродвигателей. Их особенности:
- Простота конструкции
- Низкая стоимость
- Высокая надежность
- Не требуют сложного обслуживания
Применяются в промышленных станках, насосах, вентиляторах и другом оборудовании.
Синхронные двигатели
Синхронные двигатели имеют постоянную скорость вращения ротора, не зависящую от нагрузки. Их преимущества:
- Высокий КПД
- Возможность работы с высоким коэффициентом мощности
- Стабильная скорость вращения
Используются в мощных приводах с постоянной скоростью вращения — компрессорах, насосах, вентиляторах большой мощности.

Специальные виды электродвигателей
Помимо основных типов, существует ряд специальных электродвигателей:
Шаговые двигатели
Шаговые двигатели преобразуют электрические импульсы в дискретные механические перемещения. Применяются в системах точного позиционирования.
Серводвигатели
Серводвигатели — это двигатели с обратной связью по положению. Обеспечивают высокую точность регулирования скорости, момента и положения. Используются в робототехнике, станках с ЧПУ.
Линейные двигатели
Линейные двигатели обеспечивают прямолинейное перемещение без преобразования вращательного движения. Применяются в высокоскоростном транспорте, станках.
Взрывозащищенные электродвигатели
Взрывозащищенные электродвигатели применяются во взрывоопасных зонах. Их особенности:
- Специальная конструкция, исключающая возможность воспламенения окружающей среды
- Повышенная прочность корпуса
- Защита от проникновения пыли и влаги
Используются в нефтегазовой, химической промышленности, на шахтах и других опасных производствах.
Сравнение основных типов электродвигателей
Рассмотрим сравнительные характеристики основных типов электродвигателей:
| Параметр | Двигатели постоянного тока | Асинхронные двигатели | Синхронные двигатели |
|---|---|---|---|
| Питание | Постоянный ток | Переменный ток | Переменный ток |
| Регулирование скорости | Широкий диапазон | Ограниченный диапазон | Постоянная скорость |
| КПД | 75-90% | 70-95% | 90-97% |
| Стоимость | Высокая | Низкая | Средняя |
| Обслуживание | Требует регулярного | Минимальное | Минимальное |
Выбор типа электродвигателя
При выборе электродвигателя следует учитывать ряд факторов:
- Требуемую мощность и момент
- Диапазон регулирования скорости
- Условия эксплуатации (температура, влажность, запыленность)
- Режим работы (продолжительный, повторно-кратковременный)
- Требования к энергоэффективности
- Стоимость и эксплуатационные расходы
Правильный выбор типа электродвигателя позволяет обеспечить оптимальную работу оборудования и снизить эксплуатационные затраты.

Тенденции развития электродвигателей
Основные направления совершенствования электродвигателей:
- Повышение энергоэффективности
- Применение новых материалов (например, постоянных магнитов из редкоземельных элементов)
- Интеграция с силовой электроникой и системами управления
- Разработка специализированных двигателей для конкретных применений
- Миниатюризация конструкции
Развитие технологий производства электродвигателей позволяет создавать все более эффективные и компактные устройства для различных областей применения.
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Заказать оборудование
Команда Electrodvigatel.com приглашает к сотрудничеству производителей двигателей
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Существует множество видов электродвигателей, различающихся по конструкции, принципу действия, исполнению и другим характеристикам. Различают основные виды электродвигателей:
По типу протекающего тока двигатели различают:
- Электродвигатели постоянного тока. Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов.
- Электродвигатели переменного тока. Нашли широкое применение для приводов всех типов технологического оборудования, автоматических регуляторов, электроинструментов.

По конструкции электрические машины различают с вертикально и горизонтально расположенным валом. Электродвигатели также классифицируют по мощности, климатическому исполнению, степени защиты, назначению и другим характеристикам.
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Однофазные электродвигатели
Трехфазные электродвигатели
Крановые электродвигатели
Лифтовые электродвигатели
Электродвигатели для частотного регулирования
Общепромышленные электродвигатели
Синхронные электродвигатели
Взрывозащищенные электродвигатели
Электродвигатели постоянного тока
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей.
Конструкция электродвигателя
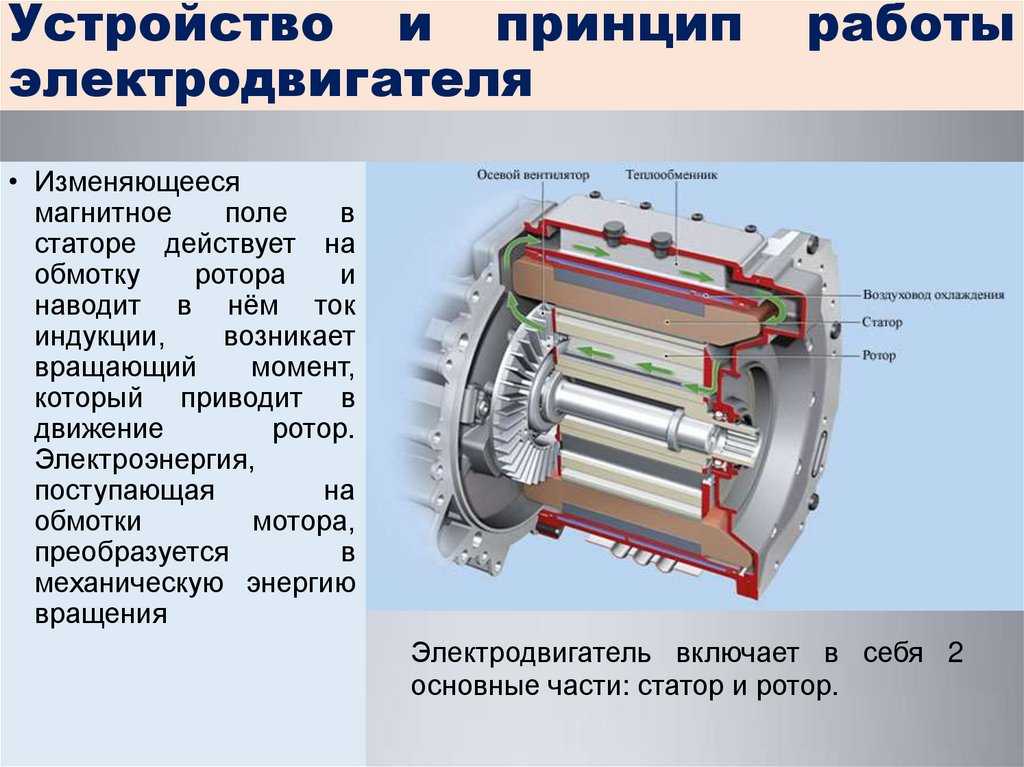
Вращающийся электродвигатель состоит из двух главных деталей:
- статора — неподвижная часть
- ротора — вращающаяся часть
У большинства двигателей внутри статора располагается ротор. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Электродвигатель в разрезе — 1 статор, 2 ротор, 3 подшипник
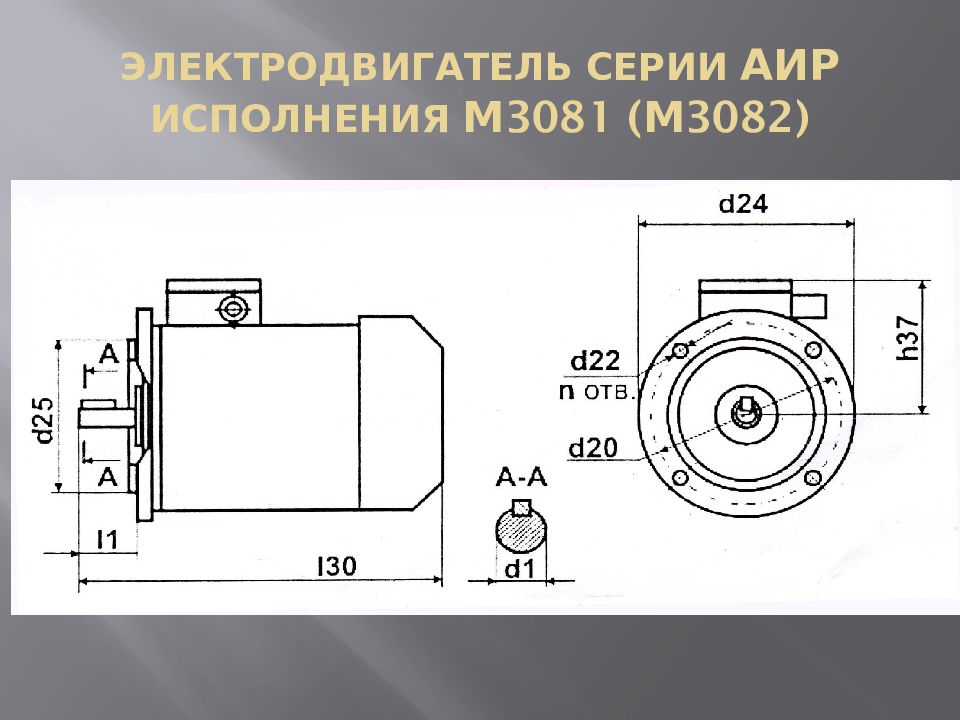
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |
3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Типы электродвигателей и их применение
СОДЕРЖАНИЕ:
1. Типы электродвигателей.
1.1 Двигатели переменного тока: синхронные; асинхронные; коллекторные.
1.2 Двигатели постоянного тока: коллекторные; униполярные и биполярные шаговые.
2. Виды взрывозащищенных электродвигателей.
Нельзя сказать, что вечный двигатель уже изобретен упорными Кулибиными, но вот варианты электрических двигателей существуют с момента открытия явления электромагнитной индукции Майклом Фарадеем. А случилось это в девятнадцатом веке. И вот с тех пор, невозможность существования без всякого рода машин – очевидна. Электрические двигатели в разных вариантах прочно вошли в нашу жизнь, быт и окружили нас комфортным существованием, а, порой, и становятся для нас ангелами-хранителями нашего здоровья и жизней.
Независимо от конструкции, алгоритм устройства электрических двигателей одинаков – цилиндрическая проточка вмещает в себя вращающийся ротор, который заключен неподвижную обмотку или, как еще называют специалисты, — статоре. При вращении, ротор создает магнитное поле, которое приводит к отталкивание разнополярных плюсов от статора.
При вращении, ротор создает магнитное поле, которое приводит к отталкивание разнополярных плюсов от статора.
Для того, чтобы отталкивание происходило постоянно, необходима периодичная перекоммутация ротора (по этому принципу работают коллекторные электродвигатели), либо следует создать условия для вращающегося магнитного поля в самом статоре (принцип асинхронного трехфазного двигателя).
Матрица работы электрических двигателей – напряжение, оно то и определяет конструкцию двигателя в зависимости от собственных свойств: переменное напряжение или постоянное напряжение. В зависимости от категории напряжения, разделяют основные виды электродвигателей. О них мы сейчас и поговорим.
Типы электродвигателей
Наиболее распространены в нашей жизни следующие типы электродвигателей:
- Электродвигатели постоянного тока, имеющие якорь на постоянных магнитах.
- Электродвигатели постоянного тока, но уже имеющие якорь с обмоткой возбуждения.

- Двигатели переменного тока синхронного типа.
- Асинхронные двигатели переменного тока.
- Линейные асинхронные двигатели.
- Серводвигатели.
- Ролики с внутренними электродвигателями, совмещенные с редукторами – мотор-ролики.
- Вентильные двигатели.
Виды электрических двигателей переменного тока – синхронные двигатели – имеют частоту вращения ротора идентичную частоте вращения магнитного поля в воздушной прослойке – зазоре. Такие типы электрических двигателей – это сердце вентиляторов, насосов, и других приборов, которые должны работать с постоянной скоростью и имеют мощность от сотен киловатт.
Еще один вид электрических двигателей переменного тока – асинхронные. Частота вращения ротера здесь противоположна частоте вращения магнитного поля, созданного обмоткой статора. Асинхронные двигатели, в свою очередь, делятся на двигатели с короткозамкнутым ротором и фазным ротором, а статор, имеющий одинаковую конструкцию в обоих вариантах, может иметь различия в обмотке.
Асинхронные двигатели переменного тока – основополагающие преобразователи электроэнергии в механическую. В свою очередь, асинхронные двигатели делятся на однофазные, двухфазные и трехфазные. Чаще всего – с короткозамкнутым ротером.
Однофазный асинхронный электродвигатель, как уже понятно из названия, имеет в наличии только одну фазу – обмотку. Недостаток этого двигателя – он не может запуститься в работу самостоятельно. Однофазным двигателям для начала процесса нужен стартовый толчок или включение дополнительной спусковой обмотки. Соответственно, что принцип двухфазных и трехфазных двигателей – это две-три обмотки – фазы на статоре.
Двухфазные электродвигатели самодостаточны при запуске начала работы, однако имеют проблемы с реверсом.
Трехфазный – практически самый совершенный двигатель на сегодняшний день.
Коллекторные двигатели переменного тока, мощностью от двух килоВатт, применяют как для переменного, так и для постоянного тока, что является неоспоримым преимуществом для электрического двигателя всех типов. Используют такие двигатели в тех случаях, когда требуется высокая частота вращения. Они заметно выйгрышны на фоне остальных электродвигателей при пусковом моменте, который, в этом случае, пропорционален току, а не оборотам, что позволяет уменьшить нагрузку на электросеть при запуске и контролировать обороты.
Высокая скорость ротора, скоростной реверс, возможности генератора и тяги дает расширяет возможности использования коллекторных двигателей. Мало того, — простота установки или возможность устранения поломки, при наличии чертежей, — неоспоримый плюс для бытового использования.
Но все, как и медали, имеет две стороны. Вторая сторона панегириков работы коллекторных двигателей – их дороговизна и повышенный шум при работах.
Ликбез электрических двигателей постоянного тока. Еще в недалеком прошлом, этот тип двигателей был фаворитом, однако время идет, а наука не стоит на месте. И на сегодняшний день, двигатели такого типа практически полностью вытеснены электродвигателями асинхронного типа.
Причины банально просты – экономические затраты применения нижеупомянутого типа двигателей значительно ниже, чем электродвигателей постоянного тока.
Типы электродвигателей с постоянным током работают по принципу постоянного переключения обмоток ротора коллектором. Каждая обмотка – своего рода рамка с током, вращающаяся в магнитном поле. В электродвигателе находится несколько таких рамок, к каждой из которых, прилагается пластина в коллекторе по нему же и передается ток.
Устройство такого типа электродвигателя дает возможность работать от постоянного либо переменного напряжения.
Сфера применения видов электрических двигателей постоянного тока достаточно широка – они регулируют электроприводы с высокими динамическими и эксплуатационными показателями, а именно: равномерность вращения и высокие перезагрузочные способности. Самый простой пример бытового использования таких электродвигателей – электротранспорт.
Про коллекторные двигатели мы писали выше, но еще раз повторим, что коллекторные двигатели можно использовать и при переменном токе и постоянном, что очень удобно и практично, но не всегда бюджетно.
Что касается униполярных и биполярных электродвигателей постоянного тока… Униполярный двигатель подарил миру Питер Барлоу в 1824 году. Нашим современникам он больше известен как «колесо Барлоу». Представляет собой такой двигатель два зубчатых колеса, расположенных на одной оси, которые вращаются благодаря взаимодействию тока с магнитным током постоянных магнитов.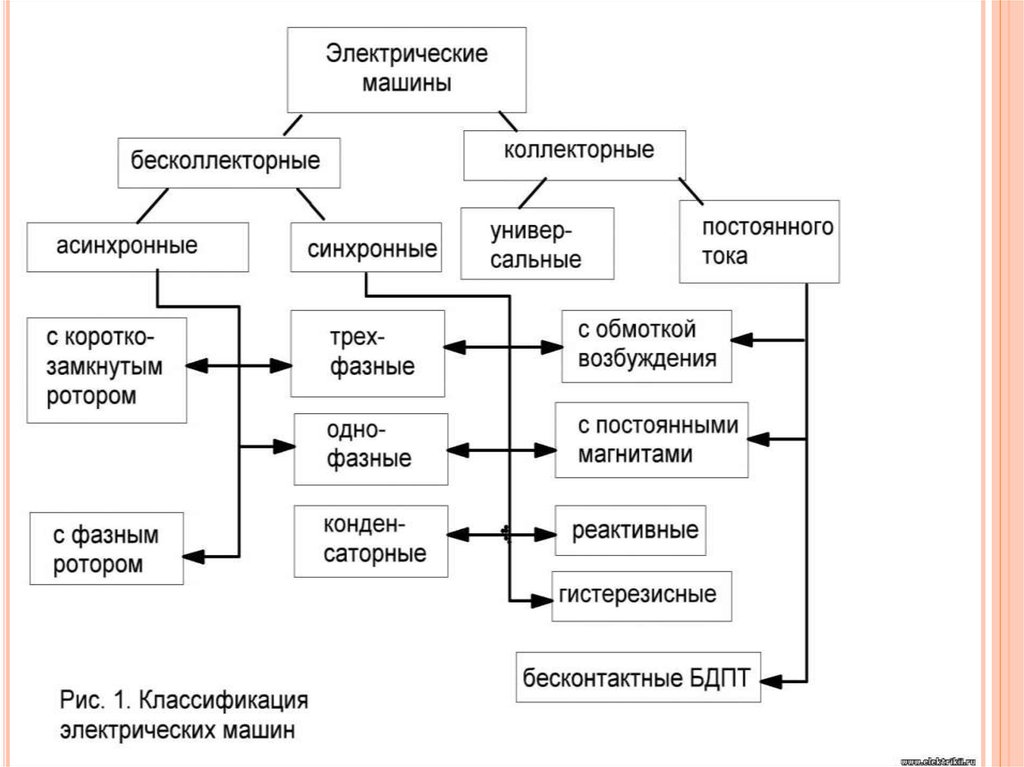 Направление вращения может изменяться при изменении контактов и расположения магнитных полюсов. Работает такой вид электродвигателя на преобразование электрических импульсов в механические, носящие дискретный характер.
Направление вращения может изменяться при изменении контактов и расположения магнитных полюсов. Работает такой вид электродвигателя на преобразование электрических импульсов в механические, носящие дискретный характер.
С таким видом электрических двигателей мы чаще всего сталкиваемся в канцелярской и офисной технике. Мал да удал – именно так можно сказать об униполярных электрических двигателях. Они действительно не очень большого размера, но достаточно продуктивны.
По своему устройству, униполярный отделено напоминает однофазный двигатель – их связывает одиночная обмотка в каждой фазе, а различие – наличие отвода от середины отводки. Именно это и позволяет менять направления вращения. Конструкция униполярного электродвигателя постоянного тока работает без коллектора в своей конструкции.
Где необходимы более высокие, мощные и быстрые характеристики, используют серводвигатели.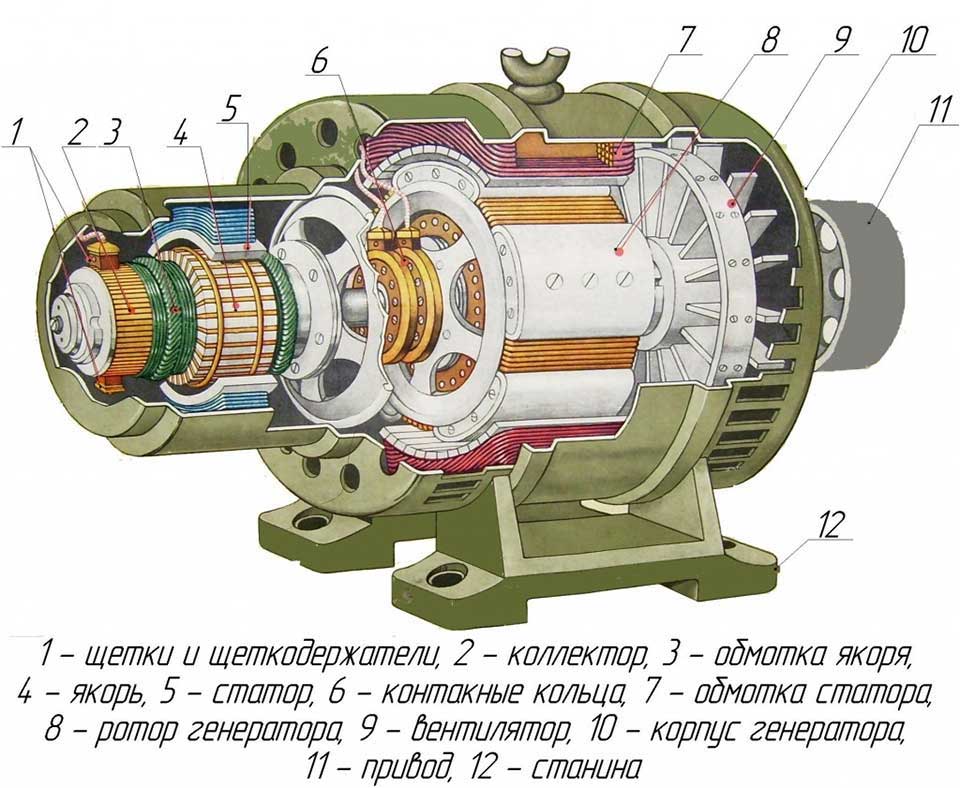 Они предназначены для широкого спектра скоростей, гарантируют плавность хода, минимальную вибрацию и децибелы шума. Управляются серводвигатели при помощи преобразователя частоты – инвертора.
Они предназначены для широкого спектра скоростей, гарантируют плавность хода, минимальную вибрацию и децибелы шума. Управляются серводвигатели при помощи преобразователя частоты – инвертора.
Вид серводвигателей высокотехнологичен и работает по принципу обратной связи. Это мощный электродвигатель со способностью набора очень большой скорости вращения вала, которая регулируется при помощи ПО. Серводвигатели – идеальные рабочие лошадки в поточном промышленном оборудовании и станках.
Помимо вышеописанных видов электрических двигателей, существуют линейные электродвигатели, работающие по принципу прямолинейного движения ротора и статора относительно друг друга. Такой электродвигатель исключает механическую передачу.
Синхронные электродвигатели – частота вращения ротера идентична частоте вращения магнитного поля в воздушной дельте. Такие двигатели входят в комплектацию вентиляторов, насосов и генераторов. Работают синхронные двигатели с постоянной скоростью.
Работают синхронные двигатели с постоянной скоростью.
Асинхронные электродвигатели имеют различные частоты вращений ротера и магнитного тока, создаваемого обмоткой сатора. При одинаковой конструкции сатора, асинхронные двигатели разделяют на два вида – с короткозамкнутымротором и фазным ротором.
Алгоритм устройства любого электрического двигателя идентичен и он не зависит от конструкции и технических характеристик агрегата: сатор (неподвижная обмотка), вращающийся ротор, продуцирующий магнитное поле и отталкивающийся своими полюсами от статора.
Виды взрывозащищенных электродвигателей
Взрывозащищенные электродвигатели составляют комплектующую деталь оборудования, которое используют при работе во взрывоопасных и легковоспламеняющихся условиях. Как правило, это область нефтепереработки, газовая и химическая промышленность.
Производят такие двигатели из максимально прочных материалов и оснащают взрывонепроницаемой оболочкой, которая надежно защищает электрические двигатели от механических, термических и прочих повреждений. Ремонт электродвигателей должен производиться в надежных сервисных центрах.
Ремонт электродвигателей должен производиться в надежных сервисных центрах.
Самыми безопасными из такой категории электродвигателей считаются двигатели серии ВА, имеющие маркировочный индекс 1 ExdIIBT4х по ГОСТР 51330.0.
Маркировка буквой «d», характеризуются взрывозащищенные двигатели, оснащенные взрывозащитной оболочкой.
Маркировка «х» означает необходимость дополнительных мер при монтаже электродвигателя, которые уберегут агрегат от растягивания, скручивания и выпадения кабелей и вводов.
Типы электродвигателей
Типы электродвигателей
Электрический двигатель – так называют электрическую машину (электромеханический преобразователь энергии), в которой энергия электричества преобразуется в механическую. При этом выделяется тепло.
Принцип действия
Рабочая схема электродвигателя очень проста. В основе функционирования электрической машины существует принцип электромагнитной индукции. Электрический механизм состоит из статора (неподвижного), который устанавливается в синхронных или асинхронных машинах переменного тока или индуктора (электродвигатели постоянного тока) и ротора (подвижной части, устанавливаемого в синхронных или асинхронных машинах переменного тока) или якоря (в машине тока постоянного). В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
В основе функционирования электрической машины существует принцип электромагнитной индукции. Электрический механизм состоит из статора (неподвижного), который устанавливается в синхронных или асинхронных машинах переменного тока или индуктора (электродвигатели постоянного тока) и ротора (подвижной части, устанавливаемого в синхронных или асинхронных машинах переменного тока) или якоря (в машине тока постоянного). В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
Роторы бывают:
— Короткозамкнутые
— Фазные (имеющие обмотку). Применяются в случае уменьшения пускового тока и для регуляции частоты вращения асинхронного электродвигателя.
В основном, представлены крановым электродвигателем серии МТКН (который по большей части применяется в крановых установках).
Якорем называют подвижную часть машины постоянного тока (генератора или двигателя) или же функционирующего по данному принципу универсального двигателя (который часто встречается в электрических инструментах). Универсальным двигателем называют ДПТ (двигатель постоянного тока), который имеет последовательное возбуждение (когда обмотки индуктора и якоря
Универсальным двигателем называют ДПТ (двигатель постоянного тока), который имеет последовательное возбуждение (когда обмотки индуктора и якоря
включены последовательно). Различие только в расчете обмоток. На постоянном токе нет реактивного (емкостного или индуктивного) сопротивления. Именно поэтому любая болгарка, если вынуть электронный блок, будет в рабочем состоянии, особенно на постоянном токе и при меньшем сетевом напряжении.
Принцип функционирования асинхронного трехфазного электродвигателя
При включении питания в статоре возникает вращающееся круговое магнитное поле. Оно пронизывает короткозамкнутую обмотку ротора и появляется ток индукции. Согласно закону Ампера (на проводник, находящийся под током, помещенный при этом в магнитное поле, действует ЭДС сила), ротор начинает вращаться.
Частота его вращения зависит от частоты напряжения, а также от числа пар полюсов магнитов. Разность между частотой вращения ротора и частотой вращения поля магнитного статора характеризуется скольжением. Электродвигатель асинхронный называется асинхронным, потому что частота вращения поля магнитного статора не совпадает с частотой ротора.
Электродвигатель асинхронный называется асинхронным, потому что частота вращения поля магнитного статора не совпадает с частотой ротора.
Синхронный двигатель отличается от него конструкцией ротора. Ротор в подобном двигателе выполнен либо электромагнитом, либо постоянным магнитом. Также может иметь в себе частичку беличьей клетки (для запуска). В роторе непременно содержатся электромагниты или постоянные магниты. Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Асинхронные двигатели широко применяются во многих отраслях техники. Это особенно характерно для обычных по конструкции и трехфазных прочных асинхронных двигателей, которые имеют коротко-замкнутые роторы. Такие двигатели дешевле и надежнее обычных электрических двигателей и не нуждаются в особом уходе. Название «асинхронный» указывает на то, что в подобном двигателе ротор вращается с вращающимся полем статора не синхронно. В отсутствие трехфазной сети асинхронный двигатель включают в сеть однофазного тока.
Название «асинхронный» указывает на то, что в подобном двигателе ротор вращается с вращающимся полем статора не синхронно. В отсутствие трехфазной сети асинхронный двигатель включают в сеть однофазного тока.
Устройство статора асинхронного электродвигателя очень простое. Он состоит из пакета лакированных листов стали электротехнической толщиной 0,5 мм. В пазах пакета, такого же, как в синхронной машине, уложена обмотка. Статор трехфазного асинхронного двигателя имеет три фазы обмотки. Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Схема двухполюсной машины
Схема двухполюсной машины выглядит очень просто. В машине содержатся четыре паза из расчета на каждую фазу. При поступлении питания на обмотки статора от трехфазной сети получается особое вращающееся поле. Это получается потому, что токи в фазах обмотки смещены в пространстве на 120° относительно друг друга и сдвинуты по фазе на 120°. При синхронной частоте вращения nc поля электродвигателя с р парами полюсов верно при частоте токов в f: nc=f/p. Так, при частоте 50 Гц получается для р = 1, 2, 3 (двух-, четырех или шести машин полюсных) получаются синхронные частоты вращения в nc = 3000, 1500 и 1000 об/мин.
При синхронной частоте вращения nc поля электродвигателя с р парами полюсов верно при частоте токов в f: nc=f/p. Так, при частоте 50 Гц получается для р = 1, 2, 3 (двух-, четырех или шести машин полюсных) получаются синхронные частоты вращения в nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя состоит из листов электротехнической стали. Он может выполняться в виде ротора с контактными кольцами (фазный ротор) или короткозамкнутого ротора (с беличьей клеткой). В короткозамкнутом роторе обмотка выглядит в виде стержней из металла (бронзы, меди или алюминия). Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами. Соединение стержней осуществляет при помощи пайки сваркой или твердым припоем. При использовании сплавов из алюминия или алюминия стержни ротора, а также закорачивающие кольца и лопасти вентилятора, располагающиеся на них, производят при помощи литья под давлением.
Прямо у ротора электрического двигателя с контактными кольцами в пазах располагается трехфазная обмотка. По внешнему виду она походит на обмотку статора, включенную звездой. Начала фаз данной обмотки соединены с тремя контактными кольцами, которые закреплены на валу. В процессе запуска двигателя можно выполнить регулировку частоты вращения. Для этого подсоединяют к фазам обмотки ротора реостаты (делается это через щетки и контактные кольца). После успешного разбега кольца контактов замыкаются накоротко. Это значит, что обмотка двигателя ротора выполняет те же самые функции, что и обмотка короткозамкнутого ротора.
По внешнему виду она походит на обмотку статора, включенную звездой. Начала фаз данной обмотки соединены с тремя контактными кольцами, которые закреплены на валу. В процессе запуска двигателя можно выполнить регулировку частоты вращения. Для этого подсоединяют к фазам обмотки ротора реостаты (делается это через щетки и контактные кольца). После успешного разбега кольца контактов замыкаются накоротко. Это значит, что обмотка двигателя ротора выполняет те же самые функции, что и обмотка короткозамкнутого ротора.
Классификация электрических двигателей
По природе возникновения вращающего момента электрические двигатели делятся на магнитоэлектрические и гистерезисные. У гистерезисных двигателей вращающийся момент создается за счет гистерезиса при перемагничивании ротора. Подобные устройства считаются нетрадиционными и мало распространены в промышленности.
Самым распространенным товаром считаются магнитоэлектрические двигатели. По типу потребляемой энергии они подразделяются на две группы – двигатели тока постоянного и двигатели тока переменного. Также существуют так называемые двигатели универсальные, которые питаются обоими видами токов.
По типу потребляемой энергии они подразделяются на две группы – двигатели тока постоянного и двигатели тока переменного. Также существуют так называемые двигатели универсальные, которые питаются обоими видами токов.
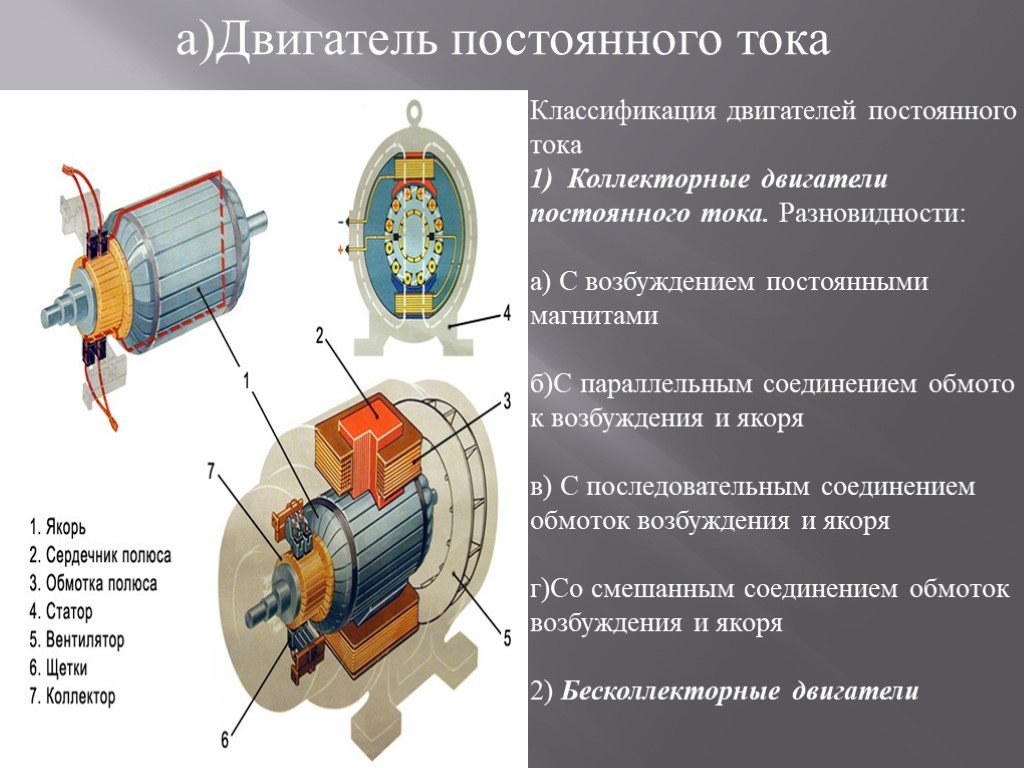
Двигатель постоянного тока
Двигателем постоянного тока называют электродвигатель, чье питание происходит за счет постоянного тока. Данный тип двигателей также принято подразделять по наличию щёточно-коллекторного узла на две группы:
— бесколлекторные
— коллекторные
Щёточно-коллекторный узел отвечает за качественное электрическое соединение цепей неподвижной и вращающейся части машины. Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Коллекторные двигатели по типу возбуждения подразделяются на:
— двигатель с самовозбуждением
— двигатель с независимым возбуждением (от постоянных магнитов и электрических магнитов).
Двигатель с самовозбуждением подразделяется на:
— двигатель, имеющий параллельное возбуждение (обмотка якоря в этом случае включается строго параллельно обмотке возбуждения)
— двигатель, имеющий последовательное возбуждение (обмотка якоря в данном случае якоря включается строго последовательно обмотке возбуждения)
— двигатель, имеющий смешанное возбуждение (обмотка возбуждения в данном случае включается последовательно частично и параллельно частично обмотке якоря).
Вентильные двигатели (бесколлекторные) – это электрические двигатели, которые выполняются в виде замкнутой системы с применением датчика, определяющего положение ротора, преобразователя координат (системы управления), а также инвертора (силового полупроводникового преобразователя). Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Двигатель переменного тока
Трехфазный асинхронный двигатель
Электродвигатели переменного тока — это электрические двигатели, питание которых осуществляется при помощи переменного тока. По принципу функционирования подобные двигатели подразделяются на асинхронные и синхронные двигатели. Принципиальное отличие заключается в том, что в синхронном двигателе первая гармоника силы магнитодвижущей статора перемещается со скоростью вращения ротора. Сам ротор перемещается со скоростью перемещения магнитного поля в статоре. У асихронного двигателя всегда присутствует разница между скоростью перемещения ротора и скоростью магнитных полей в статоре (ротор вращается медленнее поля).
По принципу функционирования подобные двигатели подразделяются на асинхронные и синхронные двигатели. Принципиальное отличие заключается в том, что в синхронном двигателе первая гармоника силы магнитодвижущей статора перемещается со скоростью вращения ротора. Сам ротор перемещается со скоростью перемещения магнитного поля в статоре. У асихронного двигателя всегда присутствует разница между скоростью перемещения ротора и скоростью магнитных полей в статоре (ротор вращается медленнее поля).
Синхронный электродвигатель — это электрический двигатель тока переменного. Ротор синхронно вращается с полем магнитным питающего напряжения. Подобные устройства применяются для обеспечения больших мощностей (более сотни киловатт). Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Асинхронный электродвигатель — это электрический двигатель переменного тока. Частота вращения ротора в данном двигателе существенно отличается от вращения полей магнита, которые создаются от питающего напряжения. Подобные устройства наиболее распространены.
По количеству фаз двигатель тока переменного принято подразделять на:
— Однофазные электродвигатели. Запуск подобных устройств производится вручную. Они могут иметь пусковую обмотку или фазосдвигающую цепь.
— Двухфазный (сюда входят и конденсаторные)
— Электродвигатель трехфазный
— Многофазный
Коллекторный универсальный электродвигатель
Коллекторный универсальный электродвигатель – это электрический коллекторный двигатель, который может функционировать как на переменном, так и на постоянном токе. Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Двигатель переменного тока, питающийся от промышленной сети 50 ГЦ, не может обеспечить частоту вращения более 3000 об/мин. Именно поэтому для получения высочайших частот следует использовать коллекторный электродвигатель. Такой двигатель получается меньше и легче, в сравнении с двигателем тока переменного такой же мощности. Также применяются особые передаточные механизмы, которые позволяют изменять кинематические параметры механизмов до нужных вам (так называемые мультипликаторы). При использовании преобразователей частоты или сети частоты повышенной (в 100, 200 или 400 Гц) двигатель переменного тока оказывается меньше и легче, в сравнении с коллекторным двигателем (поскольку иногда коллекторный узел занимает ½ объема). Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Синхронный двигатель, имеющий датчик положения ротора и инвертор, считается электронным аналогом обычного коллекторного постоянного тока. Коллекторный универсальный двигатель считается электродвигателем коллекторным постоянного тока, имеющим последовательно включенные обмотки статора (возбуждения). Подключение электродвигателя такого типа не вызывает сложностей. Он также оптимизирован для функционирования на переменном токе электрической бытовой сети. Подобный тип двигателя вне зависимости от полярности поданного напряжения вращается строго в одну сторону. Это происходит потому, что обмотки ротора и статора соединены последовательно и смена полюсов полей магнитных данных устройств происходит одновременно, а значит, результирующий момент направлен в одну сторону. Если необходима работа на переменном токе, применяют статор из мягкого магнитного материала, имеющий малый гистерезис (малое сопротивление перемагничиванию).
Если необходимо уменьшение потерь на вихревые токи, берут наборный статор, изготовленный из изолированных пластин. Достоинством функционирования подобного двигателя считается то, что в режиме пуска и перегрузки индуктивное сопротивление обмоток ограничивает ток и максимальный момент двигателя до 5 – 3 от номинального.
Электрический синхронный двигатель возвратно-поступательного движения
Принцип его функционирования прост. Подвижная часть выполняется в виде магнитов, которые крепятся на штоке. Переменный ток электродвигателя проходит через неподвижные обмотки. Под действием этого процесса постоянные магниты перемещают шток.
Лось Анастасия
Специально для Двигатель.инфо
47462 просмотра
Различные типы электродвигателей, используемых в электромобилях
Если вы заинтересованы в глубоком погружении в технологию двигателей внутреннего сгорания, вы должны быть готовы к тому, что вас обстреляют множеством различных концепций. Безнаддувные двигатели, двигатели с турбонаддувом, непосредственный впрыск, непрямой впрыск или как прямой, так и непрямой впрыск! Бензин, дизель, СПГ, СНГ, цикл Аткинсона, цикл Миллера, цикл Будэка, цикл Дизеля и цикл Отто (см. двигатель Mazda Skyactiv-X), турбо с фиксированной геометрией, турбо с изменяемой геометрией, турбо с двойной прокруткой, регулируемые фазы газораспределения… список продолжается. на.
Безнаддувные двигатели, двигатели с турбонаддувом, непосредственный впрыск, непрямой впрыск или как прямой, так и непрямой впрыск! Бензин, дизель, СПГ, СНГ, цикл Аткинсона, цикл Миллера, цикл Будэка, цикл Дизеля и цикл Отто (см. двигатель Mazda Skyactiv-X), турбо с фиксированной геометрией, турбо с изменяемой геометрией, турбо с двойной прокруткой, регулируемые фазы газораспределения… список продолжается. на.
Почти автоматически возникает вопрос: почему у нас так много конструкций и концепций двигателей внутреннего сгорания? Ответ прост — потому что ни один из них не является достаточно хорошим с точки зрения эффективности. В поисках повышения эффективности инженеры внедряли множество конструкций на протяжении всей истории автомобилестроения. Актуально ли это разнообразие конструкций и для электродвигателей? Сколько типов двигателей используется в электромобилях? Ответ только 3 основных. Познакомимся с ними.
Асинхронный асинхронный двигатель — Краткий урок истории
Асинхронный асинхронный двигатель не является чем-то новым. Он был изобретен двумя независимыми исследователями — единственным и неповторимым Николой Теслой и Галилео Феррарисом. Несмотря на то, что итальянский изобретатель впервые разработал этот двигатель в 1885 году, Никола Тесла первым подал заявку на патент в 1888 году.
Он был изобретен двумя независимыми исследователями — единственным и неповторимым Николой Теслой и Галилео Феррарисом. Несмотря на то, что итальянский изобретатель впервые разработал этот двигатель в 1885 году, Никола Тесла первым подал заявку на патент в 1888 году.
Изобретение асинхронного двигателя, без сомнения, является одним из величайших достижений в использовании электричества для обеспечения нашей жизни. Внедрение этого типа двигателя настолько широко распространено в наши дни, что без него очень трудно представить повседневную жизнь. Эти двигатели используются во многих электрических устройствах, и подавляющее большинство промышленных двигателей относятся к асинхронному асинхронному типу.
Исторический патент Николы Теслы на асинхронный двигатель
Как работает асинхронный асинхронный двигатель?
Все электродвигатели состоят из двух основных частей. Статическая часть называется статором, а вращающаяся часть называется ротором. Начнем со статора — обычно это стальной цилиндр с прорезями и медными катушками, сплетенными с определенной геометрией. Эти катушки питаются трехфазным переменным током, который был преобразован из постоянного тока (обеспечиваемого аккумулятором) в силовой электронике. Этот ток создает вращающееся магнитное поле в статоре, и скорость этого вращающегося магнитного поля называется синхронной скоростью.
Начнем со статора — обычно это стальной цилиндр с прорезями и медными катушками, сплетенными с определенной геометрией. Эти катушки питаются трехфазным переменным током, который был преобразован из постоянного тока (обеспечиваемого аккумулятором) в силовой электронике. Этот ток создает вращающееся магнитное поле в статоре, и скорость этого вращающегося магнитного поля называется синхронной скоростью.
По сути, вот как работает этот тип двигателя: переменное напряжение подается на медные катушки (или обмотки), и в результате мы получаем вращающееся магнитное поле, это поле индуцирует напряжение в роторе, которое, в свою очередь, вызывает протекание тока. . Этот поток тока создает собственное вращающееся магнитное поле в роторе, которое отстает от магнитного поля статора. Сила между двумя магнитными полями, которые приводят в движение ротор, называется силой Лоренца. Затем движение ротора передается на колеса автомобиля через соответствующий редуктор.
Этот двигатель называется асинхронным, потому что вращающееся магнитное поле ротора и статора не синхронизированы. Индукционная часть возникает из-за вращающегося магнитного поля, напряжения и тока, индуцируемых статором. Когда мы нажимаем на педаль акселератора, магнитное поле ротора немного отстает от поля статора. Когда мы замедляемся и двигатель работает как генератор (рекуперативное торможение), то вращающееся магнитное поле ротора опережает статор. Эта разница во вращающихся магнитных полях называется «скольжением» и обычно составляет до 5 % в зависимости от конструкции двигателя.
Индукционная часть возникает из-за вращающегося магнитного поля, напряжения и тока, индуцируемых статором. Когда мы нажимаем на педаль акселератора, магнитное поле ротора немного отстает от поля статора. Когда мы замедляемся и двигатель работает как генератор (рекуперативное торможение), то вращающееся магнитное поле ротора опережает статор. Эта разница во вращающихся магнитных полях называется «скольжением» и обычно составляет до 5 % в зависимости от конструкции двигателя.
Типовой КПД трехфазного асинхронного двигателя, используемого в автомобильной промышленности, составляет около 90 %. Благодаря своей надежности, простоте, долговечности и отсутствию требований к экзотическим материалам этот двигатель используется почти исключительно в промышленных процессах. Кроме того, его хорошие характеристики перегрузки делают его идеальным двигателем по требованию, поэтому его часто используют в качестве переднего двигателя в электромобилях с полным приводом.
Плюсы
- Хорошая эффективность
- Дешево сделать
- Нет необходимости в редкоземельных материалах
- Практически идеальная надежность
Минусы
- Большие потребности в охлаждении
- Меньшая удельная мощность
- Более низкий КПД по сравнению с другими двигателями
Некоторые автомобили, использующие асинхронные двигатели: Audi e-Tron SUV, Mercedes-Benz EQC, Tesla Model S, 3, X и Y на передних осях, а также автомобили VW Group MEB используют их на передних осях.
Асинхронный двигатель, используемый в Mercedes-Benz EQC
Синхронный двигатель с постоянными магнитами
Основное различие между асинхронными асинхронными двигателями и синхронными двигателями с постоянными магнитами заключается в способе создания и взаимодействия вращающихся магнитных полей в роторе и статоре. . В синхронных двигателях с постоянными магнитами в роторе имеется собственное вращающееся магнитное поле, создаваемое постоянными магнитами (отсюда и название двигателя). Вращающиеся магнитные поля ротора и статора в этих двигателях заблокированы, и скольжение отсутствует.
Постоянные магниты в роторе являются одним из ключевых элементов, повышающих удельную мощность и повышающих эффективность двигателя. Повышенная удельная мощность означает высокую мощность при малом объеме, поэтому двигатели с постоянными магнитами используются исключительно в PHEV. Электродвигатель в этих транспортных средствах размещен в коробке передач, и существуют ограничения по пространству.
Постоянные магниты изготавливаются из редкоземельных материалов, большинство из которых контролируется Китаем. Есть вопросы об этических аспектах процесса добычи, и по этой причине многие производители стараются сократить использование этих материалов в своих двигателях. Тем не менее, синхронный двигатель с постоянными магнитами является королем КПД — он может достигать до 94-95% и когда в машине только один мотор, то используется именно этот тип мотора.
Плюсы
- Очень высокая эффективность
- Нижнее охлаждение требуется
- Высокая удельная мощность
Минусы
- Стоимость производства
- Потребность в редкоземельных материалах
- Теоретическая опасность размагничивания
Hyundai Ioniq 5 Двигатели с постоянными магнитами
Двигатели с постоянными магнитами используются в Hyundai Ioniq 5, Kia EV6, Tesla Model S, 3, X и Y на задних осях. Автомобили VW Group MEB также используют их на задних мостах, Jaguar i-pace, Audi e-tron GT и Porsche Taycan, и это лишь некоторые из них.
Автомобили VW Group MEB также используют их на задних мостах, Jaguar i-pace, Audi e-tron GT и Porsche Taycan, и это лишь некоторые из них.
Синхронный двигатель с электрическим возбуждением
Синхронные двигатели с постоянными магнитами обеспечивают наилучший КПД из всех, но редкоземельные материалы, необходимые для их конструкции, имеют определенные последствия. Для решения этих проблем некоторые производители, а именно BMW, Renault Groupe и Smart в настоящее время, используют гибридную конструкцию двигателя — они используют синхронные двигатели, для которых не требуются редкоземельные материалы.
Итак, как работают эти моторы? Что ж, вместо использования постоянных магнитов в роторе для создания тока в этих двигателях используются щетки и контактные кольца. По данным BMW, этот тип двигателя обеспечивает КПД до 93%, что очень близко к эффективности двигателей с постоянными магнитами. Несмотря на то, что этот тип двигателя кажется очень многообещающим, тот факт, что в нем используются щетки, означает, что в какой-то момент потребуется замена этих компонентов. Будем надеяться, что производители, разрабатывающие такой мотор, используют щетки с достаточно долгим сроком службы.
Будем надеяться, что производители, разрабатывающие такой мотор, используют щетки с достаточно долгим сроком службы.
Синхронный двигатель BMW с электрическим возбуждением
Pros
- Очень высокий КПД
- Дешевле в производстве, чем синхронный двигатель с постоянными магнитами .
- Отсутствие риска размагничивания
- Нет необходимости в редкоземельных материалах
Минусы
- Щетки долговременная надежность
Этот тип двигателя используется в BMW iX3, iX и i4; Renault Megane E-TECH и SMART EQ.
Что такое электродвигатель? | Различные типы электродвигателей
Электродвигатели очень важны в современной жизни. В повседневной жизни мы сознательно или неосознанно где-то пользуемся моторами. На рынке представлено множество типов двигателей. Но мы выбираем двигатель, исходя из его применения и напряжения. Каждый двигатель состоит из двух важных частей. Один — статор (обмотка возбуждения), а другой — ротор (обмотка якоря).
Один — статор (обмотка возбуждения), а другой — ротор (обмотка якоря).
Основной функцией обмотки статора является создание в ней постоянного магнитного поля при размещении внутри нее ротора. Из-за магнитного поля обмотка якоря использует энергию для создания крутящего момента, достаточного для изгиба вала двигателя. В сегодняшней статье мы увидим, сколько существует типов двигателей и многое другое о них.
Краткое введение
Что такое электродвигатель?
Определение: Двигатель — это не что иное, как электромеханическая машина, преобразующая электрическую энергию в механическую. Другими словами, устройство, производящее мощность вращения, называется двигателем. Принцип работы электродвигателя зависит главным образом от взаимодействия магнитного и электрического полей.
Электродвигатели делятся на три типа: один — двигатель переменного тока, другой — двигатель постоянного тока, а третий — двигатель особого типа, поэтому двигатель переменного тока использует переменный ток в качестве входного тока, а двигатель постоянного тока — постоянный ток.
Типы электродвигателей:
Электродвигатель разделен на три основные секции следующим образом:
| Серийный номер | Типы электродвигателей |
| #1. | Двигатель переменного тока |
| #2. | Двигатель постоянного тока |
| #3. | Двигатели специального назначения |
#1. Двигатели переменного тока:
В тип двигателя переменного тока в основном входят синхронные, асинхронные, асинхронные двигатели.
#1.1. Синхронный двигатель:
Работа этого двигателя в основном зависит от 3 фаз. Ток возбуждения генерируется статором внутри этого двигателя. Который вращается с постоянной скоростью в зависимости от частоты переменного тока. При этом статор и ротор зависят от той же скорости, что и ток. Между током статора и скоростью вращения ротора нет никакого воздушного зазора. Точность вращения у этого мотора очень высокая. Вот почему эти двигатели широко используются, особенно в робототехнике и автоматизации.
Между током статора и скоростью вращения ротора нет никакого воздушного зазора. Точность вращения у этого мотора очень высокая. Вот почему эти двигатели широко используются, особенно в робототехнике и автоматизации.
#1.2. Асинхронный двигатель:
Двигатель, который работает с неравной скоростью, называется асинхронным двигателем. Другое название этого двигателя — асинхронный двигатель. Этот двигатель в основном используется для преобразования электрической энергии в механическую. Этот двигатель работает по принципу электромагнитной индукции. Этот двигатель разделен на две секции в зависимости от конструкции ротора. Например, «беличья клетка» и фазовая рана.
Читайте также: Разница между двигателем переменного тока и двигателем постоянного тока
#2. Двигатель постоянного тока:
Двигатели постоянного тока подразделяются на 5 основных типов:
- Шунтирующий двигатель постоянного тока.

- Двигатель с независимым возбуждением.
- Двигатель постоянного тока.
- Двигатель постоянного тока с постоянным током.
- Составной двигатель постоянного тока.
#2.1. Шунтирующий двигатель постоянного тока:
Двигатель, у которого обмотка возбуждения и обмотка якоря соединены параллельно, называется шунтирующим двигателем. Другое название этого двигателя — двигатель постоянного тока с параллельной обмоткой, в котором тип обмотки известен как шунтирующая обмотка. Шунтирующий двигатель постоянного тока работает только на постоянном токе.
#2.2. Двигатель с независимым возбуждением:
Двигатель, подключенный к статору и ротору двигателя с помощью отдельного источника питания, называется двигателем с независимым возбуждением. Так что шунтом двигателя можно управлять, а обмотка якоря усилена для создания потока.
Читайте также: Что такое генератор постоянного тока | Типы генераторов постоянного тока
#2.3. Двигатель постоянного тока:
В двигателе постоянного тока обмотки ротора соединены последовательно. Принцип работы этого двигателя зависит от электромагнитного закона. И согласно этому правилу всякий раз, когда вокруг проводника может образоваться магнитное поле, для увеличения скорости вращения используется внешнее поле. Эти двигатели в основном используются в стартерах, используемых в лифтах и автомобилях.
#2.4. Двигатель постоянного тока:
Полное название двигателя постоянного тока с постоянными магнитами — «двигатель постоянного тока с постоянными магнитами». Это тип двигателя постоянного тока, в котором электродвигатель может состоять из постоянного магнита для создания магнитного поля, необходимого для работы.
#2.5. Составной двигатель постоянного тока:
Составной двигатель постоянного тока представляет собой конический компонент последовательного двигателя постоянного тока для параллельного двигателя постоянного тока. Внутри этого двигателя присутствуют как шунтирующие, так и последовательные поля. В таком двигателе статор и ротор могут быть соединены друг с другом путем объединения последовательных и шунтирующих обмоток.
Внутри этого двигателя присутствуют как шунтирующие, так и последовательные поля. В таком двигателе статор и ротор могут быть соединены друг с другом путем объединения последовательных и шунтирующих обмоток.
Ряд обмоток выполнен из толстого медного провода. Так что обмотки уменьшены. Что уступает место небольшому сопротивлению. Для получения полного напряжения I/p шунтирующая обмотка может быть выполнена с несколькими витками медного провода.
Читайте также: Что такое стартер двигателя? | Типы стартеров двигателей | Преимущество стартера двигателя
#3. Двигатели специального назначения:
Двигатели специального назначения включают следующие двигатели:
- Шаговый двигатель.
- Бесщеточные двигатели постоянного тока.
- Гистерезис двигателя.
- Реактивный двигатель.

- Универсальный двигатель.
#3.1. Шаговый двигатель:
Шаговый двигатель был изобретен для прогресса. Было сделано, чтобы предложить революцию шаг-угол. Все мы знаем, что идеальный угол вращения для обычного ротора составляет 180 градусов. Однако для обычного шагового двигателя полный угол поворота составляет 10 градусов х 18 шагов. Может варьироваться в бесчисленных шагах.
Это означает, что ротор будет двигаться 18 раз со скоростью 10 градусов за полный оборот. Этот двигатель используется в плоттерах, производстве схем, оборудовании управления технологическим процессом.
#3.2. Бесщеточные двигатели постоянного тока:
Бесщеточные двигатели постоянного тока были изобретены для обеспечения превосходной производительности при меньшем пространстве по сравнению с бесщеточными двигателями. Этот двигатель меньше по сравнению с моделью двигателя переменного тока. Контроллер встроен в электродвигатель для облегчения процесса при отсутствии коллектора и токосъемного кольца.
#3.3. Гистерезисный двигатель:
Работа гистерезисного двигателя очень уникальна. Сила, необходимая для работы этого двигателя, получается за счет гистерезиса и вихревых токов. От его конструкции зависит, будет ли двигатель работать в однофазном или трехфазном режиме.
Этот двигатель также предлагает очень простое управление с постоянной скоростью, как и асинхронный двигатель. Этот двигатель работает очень тихо, без каких-либо шумов. Вот почему он используется во многих сложных приложениях, таких как звуковые проигрыватели, устройства записи звука и т. д.
#3.4. Реактивный двигатель:
Реактивный двигатель представляет собой тип однофазного синхронного двигателя. Конструкция этого двигателя аналогична конструкции асинхронного двигателя. Конструкция ротора аналогична беличьей клетке. И двигатель включает в себя основную обмотку и вспомогательную обмотку внутри статора. Вспомогательные обмотки полезны при запуске двигателя.
Поскольку они предлагают уровень предложения работы в стабильном темпе. Эти двигатели обычно используются в приложениях синхронизации, включая генераторы сигналов, записывающие устройства и т. д.
#3.5. Универсальный двигатель:
Универсальный двигатель — это особый тип двигателя. Он работает от однофазного переменного или постоянного тока. Универсальные двигатели представляют собой ряд ран, в которых обмотки возбуждения и якоря соединены последовательно. Таким образом, создается высокий пусковой момент. Этот двигатель в основном предназначен для работы на скоростях выше 3500 об/мин. Они используют источник переменного тока на низкой скорости и источник постоянного тока того же напряжения.
Часто задаваемые вопросы (FAQ):
1. Сколько существует типов электродвигателей?
На рынке существует не менее дюжины типов двигателей, но они подразделяются на два основных типа. Один двигатель переменного тока, а другой двигатель постоянного тока. То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, имеет большее значение для каждой из этих классификаций.
Один двигатель переменного тока, а другой двигатель постоянного тока. То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, имеет большее значение для каждой из этих классификаций.
2. Что является примером электродвигателя?
Электромобили имеют электродвигатели. Энергия, запасенная в автомобильном аккумуляторе, преобразуется во вращение колес. Кухонный комбайн работает точно по тому же принципу.
3. Какие существуют 3 типа управления двигателем?
У нас есть четыре основных типа контроллеров двигателей и приводов, каждый из которых имеет входную мощность переменного тока, постоянного тока, сервопривода и шагового двигателя. Что изменяет функцию вывода по желанию, которая соответствует приложению.
4. Какие существуют 3 типа двигателей постоянного тока?
Доступны 3 основных типа двигателей постоянного тока: – Серийные, параллельные и комбинированные. Эти условия относятся к типу соединения обмоток возбуждения по отношению к цепи якоря.
Эти условия относятся к типу соединения обмоток возбуждения по отношению к цепи якоря.
5. Сколько типов электродвигателей представлено на рынке?
1. Двигатель переменного тока.
2. Двигатель постоянного тока.
3. Двигатель специального назначения.
Нравится этот пост? Не могли бы вы поделиться им с друзьями?
Рекомендуем прочитать –
- Источник бесперебойного питания
- Что такое генератор постоянного тока | Типы генераторов постоянного тока
- Что такое заземление | Разница между заземлением и заземлением
- Что такое датчик напряжения? | Типы датчиков напряжения | Применение датчиков напряжения
- Что такое бумажный конденсатор | Строительство бумажного конденсатора | Применение бумажного конденсатора
Что такое двигатель постоянного тока? | Принцип работы двигателя постоянного тока
Первый двигатель постоянного тока был изобретен в 18 веке. С тех пор этот мотор получил широкое развитие. Этот двигатель постоянного тока широко применяется во многих отраслях промышленности. Двигатель постоянного тока был разработан британским исследователем Стердженом в начале 1800-х и начале 1832 года с некоторыми улучшениями.
С тех пор этот мотор получил широкое развитие. Этот двигатель постоянного тока широко применяется во многих отраслях промышленности. Двигатель постоянного тока был разработан британским исследователем Стердженом в начале 1800-х и начале 1832 года с некоторыми улучшениями.
Он изобрел первый тип коллекторного двигателя постоянного тока, который может имитировать механизм. Но мы зададимся вопросом, каков КПД этого двигателя и зачем нужно знать о скорости двигателя постоянного тока. Итак, сегодня мы увидим, что такое двигатель постоянного тока. Сегодня мы увидим, каков принцип работы и как контролировать скорость этого двигателя постоянного тока.
Краткое введение
Что такое двигатель постоянного тока?
Двигатель постоянного тока приводится в действие постоянным током. В котором он работает для преобразования полученной электрической энергии в механическую энергию. Это приводит к ротационному изменению устройства, что дает возможность управлять различными приложениями в нескольких доменах.
Регулирование скорости двигателя постоянного тока — одна из самых полезных функций двигателя. Управляя скоростью двигателя, вы можете изменить скорость двигателя в соответствии с вашими требованиями и получить требуемую производительность.
Управление скоростью — это механизм, применяемый во многих случаях, например, для управления движением роботизированного транспортного средства, движением двигателя на бумажной фабрике и движением двигателя в лифте с использованием различных двигателей постоянного тока.
Читайте также: Разница между двигателем переменного тока и двигателем постоянного тока
Принцип работы двигателя постоянного тока:
Простой двигатель постоянного тока работает по принципу механическая сила. В практическом двигателе постоянного тока якорь является проводником с током, а поле создает магнитное поле.
Создает собственный магнитный поток при подаче тока на якорь. Магнитный поток либо добавляется к магнитному потоку из-за наматывания поля в одном направлении, либо компенсирует магнитный поток из-за наматывания поля. Накопление магнитного потока в одном направлении воздействует на проводник силой по сравнению с другим, и, следовательно, он продолжает вращаться.
Накопление магнитного потока в одном направлении воздействует на проводник силой по сравнению с другим, и, следовательно, он продолжает вращаться.
Вращение проводника создает ЭДС в соответствии с законом электромагнитной индукции Фарадея. Это противоречит разуму в соответствии с правилом линзы ЭДС. Это означает, что напряжение питания, таким образом, имеет особую характеристику регулирования своего крутящего момента в случае различных нагрузок из-за ЭДС позади двигателя постоянного тока.
Почему важно контролировать скорость двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя. Где это оказывает непосредственное влияние на эффективность машины и имеет большое значение для производительности и результата операции. Каждый тип материала имеет свою скорость вращения при сверлении, а также она варьируется в зависимости от размера каждого сверла.
Производительность будет меняться в зависимости от состояния насосной установки, поэтому конвейерную ленту необходимо синхронизировать с функциональной скоростью устройства. Этот фактор прямо или косвенно зависит от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Этот фактор прямо или косвенно зависит от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Управление скоростью двигателя постоянного тока осуществляется вручную или с помощью любого автоматического средства управления. Это кажется противоречащим ограничению скорости, где должно быть регулирование скорости, а не естественное изменение скорости из-за изменения нагрузки на вал.
Принцип управления скоростью:
Уравнение напряжения двигателя постоянного тока выглядит следующим образом:
В = Eb + IaRa ток, Ra – сопротивление якоря.Который мы уже знаем
Eb = (PøNZ) / 60A.P = количество полюсов.
А – постоянный.
Z – количество проводников.
N- скорость двигателя.
Изменяя значение Eb в уравнении напряжения, получаем
В = ((PøNZ) / 60A) + IaRa Или, V - IaRa = (PøNZ) / 60Aт.
е., N = (PZ / 60A) (V - IaRa) /
Вышеупомянутое уравнение также может быть записано как:
N = K (V - IaRa) / ø, K является константойЭто предполагает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения якоря.
- Скорость двигателя обратно пропорциональна расходу согласно полевым данным.
Таким образом, скорость двигателя постоянного тока регулируется тремя способами.
- Путем разделения заданного или питающего напряжения.
- Путем изменения потока и изменения тока в обмотке возбуждения.
- путем изменения напряжения якоря и изменения сопротивления якоря.
Читайте также: Лучший метод смены полюсов | Регулирование скорости асинхронного двигателя
Несколько методов управления скоростью двигателя постоянного тока:
На рынке доступны два типа двигателей постоянного тока, поэтому здесь мы поговорим о методе управления скоростью как двигателей постоянного тока, так и параллельных двигателей.
Регулирование скорости двигателя серийного типа осуществляется двумя способами:
- Техника управления якорем.
- Технология управления полем.
Техника управления якорем подразделяется на три типа:
- Управляемое сопротивление якоря
- Шунтовое управление якорем.
- Напряжение на клеммах якоря.
Управляемое якорем сопротивление:
Эта система наиболее широко используется на рынке. Регулятор в этой системе имеет последовательное подключение к электродвигателю сопротивления, как показано на рисунке ниже.
Потери мощности при контроле сопротивления в этом двигателе можно не принимать во внимание, так как этот метод регулирования в основном используется в течение длительного времени для уменьшения скорости визуального времени световой нагрузки. Это экономичный метод непрерывного крутящего момента, который в основном применяется в кранах, поездах и других транспортных средствах.

Управление шунтирующим якорем:
В этом типе управления якорем реостат будет соединен с якорем как в последовательном, так и в шунтирующем. Напряжение изменится на уровень, который приложен к якорю, и это изменяется путем изменения реостата серии.
При изменении потока возбуждения происходит изменение шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог. Из-за значительных потерь электроэнергии в сопротивлении регулирования скорости. Скорость можно контролировать до некоторой степени, но не выше нормального уровня скорости.
Напряжение на клеммах якоря:
Скорость двигателя постоянного тока также можно регулировать путем подачи питания на двигатель с использованием различных индивидуальных напряжений питания. Даже этот подход дорог и не получил широкого распространения.
Технологии управления полем подразделяются на два следующих типа:
- Полевой дивертер.
- Управление постукивающим полем (Управление постукивающим полем).
Техника полевого дивертора:
В этом методе используется дивертер. Скорость потока по полю можно уменьшить, отключив часть тока двигателя в области диапазона. Сопротивление дивертора низкое, а полевой поток низкий.
Этот метод используется для диапазона скоростей, выходящих за рамки обычного, и применяется при электрическом отклонении, когда скорость увеличивается по мере уменьшения нагрузки.
Управление перехваченным полем:
Даже в этой системе скорость увеличивается с уменьшением потока, и это достигается за счет уменьшения поворота поля от того места, где течет поток. Здесь извлекается количество ответвлений в обмотке возбуждения, и этот прием используется в электрической тяге.
Читайте также: Что такое электродвигатель? | Различные типы электродвигателей
Управление скоростью шунтового двигателя постоянного тока:
Управление скоростью шунтового двигателя постоянного тока подразделяется на два типа:
- Метод управления полем.

- Техника с управлением арматурой .
Метод управления полем для шунтирующего двигателя постоянного тока:
В этом методе существует множество магнитных потоков из-за того, что обмотка возбуждения изменяет скорость двигателя.
Магнитный поток зависит от тока, протекающего через обмотку возбуждения. Таким образом, это поле можно изменять, разделяя ток обмоткой. Это может быть достигнуто путем включения переменных резисторов последовательно с резисторами обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении. Номинальный ток протекает через обмотку возбуждения из-за номинального напряжения питания. И в результате скорость держится в норме. Поток через обмотку возбуждения уменьшается, когда сопротивление постепенно увеличивается. Это, в свою очередь, уменьшает производимый поток. Таким образом, скорость двигателя превышает нормальное значение.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока:
В этом методе скорость двигателя постоянного тока можно контролировать, контролируя сопротивление якоря, чтобы контролировать падение якоря.
В этом методе также используются переменные резисторы, включенные последовательно с якорем.
Сопротивление якоря нормальное, когда переменный резистор достигает своего минимального значения, и, следовательно, напряжение якоря уменьшается. При постепенном увеличении значения сопротивления напряжение на якоре уменьшается, что, в свою очередь, приводит к уменьшению скорости двигателя. Этот метод обеспечивает скорость двигателя ниже его нормального диапазона.
Теория управления скоростью двигателя постоянного тока:
Чтобы получить скорость двигателя постоянного тока, мы начнем с уравнения ЭДС двигателя постоянного тока. Уравнение ЭДС двигателя постоянного тока точно такое, как мы его знаем.
Поэтому мы преобразуем уравнение
N = 60A E / PZØ
С K = PZ / 60A, тогда:
Поэтому при E = V – IaRa получаем скорость двигателя постоянного тока (N):
Часто задаваемые вопросы (FAQ):
1.
Каковы методы управления скоростью двигателя постоянного тока?
Существует три основных способа регулирования скорости двигателя постоянного тока:
- Система управления потоком.
- Система регулирования напряжения.
- Система контроля сопротивления якоря.
2. Почему мы контролируем скорость двигателя постоянного тока?
Двигатели постоянного тока играют важную роль в преобразовании энергии. Это точно так же, как любая другая машина, которая преобразует электрическую энергию в механическую энергию. В механической системе скорость зависит от количества задач, поэтому для правильной механической работы требуется регулирование скорости, чтобы двигатель работал плавно.
3. Какое устройство используется для управления скоростью двигателя постоянного тока?
В этом методе скорость двигателя постоянного тока можно контролировать, контролируя сопротивление якоря, чтобы контролировать падение якоря.

