Какие бывают основные типы электродвигателей переменного тока. Как устроены и работают асинхронные и синхронные двигатели. Каковы их преимущества и области применения. Какие существуют разновидности и модификации двигателей переменного тока.
Основные типы электродвигателей переменного тока
Электродвигатели переменного тока подразделяются на две основные группы:
- Асинхронные двигатели
- Синхронные двигатели
Каждый из этих типов имеет свои особенности конструкции, принципа действия и области применения.
Устройство и принцип работы асинхронных двигателей
Асинхронные двигатели являются наиболее распространенным типом электродвигателей переменного тока. Их основные конструктивные элементы:
- Статор с обмоткой, создающей вращающееся магнитное поле
- Ротор, в котором индуцируются токи под действием поля статора
Как работает асинхронный двигатель? Вращающееся магнитное поле статора индуцирует токи в обмотке ротора. Взаимодействие этих токов с полем статора создает вращающий момент. Ротор вращается с некоторым отставанием от поля статора — этот эффект называется скольжением.
Типы роторов асинхронных двигателей
Существует два основных типа роторов асинхронных двигателей:
- Короткозамкнутый ротор — наиболее простой и надежный. Представляет собой «беличье колесо» из медных или алюминиевых стержней.
- Фазный ротор — имеет трехфазную обмотку, соединенную с контактными кольцами. Позволяет регулировать характеристики двигателя.
Особенности и применение синхронных двигателей
Синхронные двигатели отличаются тем, что частота вращения ротора в точности совпадает с частотой вращения магнитного поля статора. Их основные особенности:
- Высокий КПД и возможность работы с опережающим коэффициентом мощности
- Постоянная скорость вращения независимо от нагрузки
- Сложность пуска — требуются специальные устройства
Где применяются синхронные двигатели? Они используются в мощных приводах с постоянной скоростью — компрессорах, насосах, вентиляторах. Также находят применение в часовых механизмах и других устройствах, требующих точного поддержания скорости.
Разновидности синхронных двигателей переменного тока
Существует несколько разновидностей синхронных двигателей:
- С электромагнитным возбуждением — классический вариант
- С постоянными магнитами — компактные и эффективные
- Реактивные — простые по конструкции
- Гистерезисные — для прецизионных приводов
Каждый тип имеет свои преимущества и области применения. Например, двигатели с постоянными магнитами обладают высокой удельной мощностью и КПД.
Сравнение асинхронных и синхронных двигателей
Чем отличаются асинхронные и синхронные двигатели? Основные различия:
| Параметр | Асинхронные двигатели | Синхронные двигатели |
|---|---|---|
| Скорость вращения | Зависит от нагрузки | Постоянная |
| Пусковые свойства | Хорошие | Требуют специальных устройств |
| КПД | Средний | Высокий |
| Стоимость | Низкая | Высокая |
Выбор типа двигателя зависит от конкретного применения и требований к приводу.
Способы управления скоростью двигателей переменного тока
Существуют различные методы регулирования скорости вращения двигателей переменного тока:
- Изменение числа пар полюсов — для асинхронных двигателей
- Изменение частоты питающего напряжения — с помощью преобразователей частоты
- Изменение напряжения питания — для асинхронных двигателей
- Введение добавочного сопротивления в цепь ротора — для двигателей с фазным ротором
Наиболее универсальным и эффективным методом является частотное регулирование с помощью преобразователей частоты.

Области применения двигателей переменного тока
Двигатели переменного тока находят широкое применение в различных отраслях:
- Промышленность — приводы станков, конвейеров, насосов, вентиляторов
- Транспорт — тяговые двигатели электровозов, трамваев, троллейбусов
- Бытовая техника — стиральные машины, холодильники, кондиционеры
- Сельское хозяйство — приводы сельхозмашин и механизмов
- Строительство — подъемные краны, бетономешалки
Выбор конкретного типа двигателя зависит от требований к мощности, скорости, режиму работы и других факторов.
Преимущества и недостатки двигателей переменного тока
Каковы основные достоинства и ограничения двигателей переменного тока?
Преимущества:
- Простота конструкции и высокая надежность (особенно у асинхронных)
- Низкая стоимость
- Возможность прямого подключения к сети переменного тока
- Высокий КПД при номинальной нагрузке
Недостатки:
- Сложность регулирования скорости (без преобразователей частоты)
- Большой пусковой ток
- Низкий коэффициент мощности при неполной нагрузке
Несмотря на недостатки, простота и надежность обеспечивают широкое применение двигателей переменного тока.
Тенденции развития двигателей переменного тока
Каковы современные направления совершенствования электродвигателей переменного тока?
- Повышение энергоэффективности — применение новых материалов и оптимизация конструкции
- Интеграция с силовой электроникой — создание интеллектуальных приводов
- Разработка специализированных двигателей для конкретных применений
- Миниатюризация — создание компактных высокомощных двигателей
- Применение новых типов постоянных магнитов в синхронных двигателях
Эти тенденции направлены на повышение эффективности, расширение функциональности и улучшение массогабаритных показателей двигателей переменного тока.
Какие бывают виды электродвигателей переменного тока
Содержание
- Выбор двигателя
- Асинхронные двигатели
- Синхронные двигатели
- Заключение
Как разработать двигательную установку? Для проектирования системы любого типа имеет значение кинематическая схема и эксплуатационные условия, указанные в задании. Записав требуемые технические данные, приступают к кинематическому расчету, который является исходным для силового и энергетического расчета, как отдельных механизмов, так и всей системы. Чтобы к установке правильно подобрать электрический двигатель надо понимать из чего можно выбрать. Поэтому ниже рассмотрим какими они бывают.
Выбор двигателя
Выбор электродвигателя того или иного типа осуществляется на основе технических расчетов, которые выполняются в установленной последовательности:
- расчет мощности и ориентировочный выбор агрегата;
- проверка мотора по пусковым параметрам, перегрузке и нагреву.
Требуемая мощность, скорость и другие параметры определяются на основании исходных данных – рабочих характеристик машины. Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
В зависимости от принципа работы существуют следующие типы электродвигателей:
- асинхронники,
- синхронники.
Любой тип может быть одно-, двух- или трёхфазным. Трехфазные моторы составляют около 70% двигательной техники в промышленности. Однофазные также очень широко применяются в индустрии и составляют около 10-15% моторов.
Асинхронные двигатели
В асинхронных агрегатах весь процесс опирается на небольшую разницу в скорости между магнитными полями статора и ротора, вызывающую ток в обмотке ротора. Расчет мощности и предварительный выбор мотора производится по эквивалентному моменту сопротивления и частоте. Асинхронные двигатели бывают с короткозамкнутым и фазным ротором, как показано на структурной схеме.
Все основные параметры (обмотка, пазы статора) асинхронного мотора имеют соответствующие соотношения. Определиться с выбором техники помогают предварительный и проверочный расчёт основных параметров.
Однофазные асинхронные моторы бывают бытового назначения, потребляемая мощность их обычно невелика. К ним относятся:
- вентиляторы,
- кондиционеры,
- стиральные машины,
- компрессоры холодильников,
- водяные насосы.
Трехфазные асинхронные двигатели используются там, где необходимо большое количество электроэнергии, например, в стартерах, гидравлических насосах. Приводы переменного тока становятся все популярнее с каждым годом.
Синхронные двигатели
Расчет начальных условий для синхронных двигателей здесь не особенно важен, потому что процесс эксплуатации не основан на скольжении и индукции. Синхронные двигатели бывают:
- с электромагнитным возбуждением;
- с постоянными магнитами;
- реактивные, гистерезисные.
Однофазные синхронные электродвигатели являются распространенными источниками питания для работы электрических часов и другого мелкого высокоточного оборудования. Они требуют применения некоторого вспомогательного метода, чтобы довести их до синхронной скорости, то есть, чтобы запустить их. Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Работа трехфазных синхронных электродвигателей при постоянной синхронной скорости чаще используется для работы в системах синхронизатора.
Электродвигатели переменного тока различаются в зависимости:
- от скорости работы – постоянной, переменной и регулируемой;
- от конструктивных особенностей, то есть могут быть открытыми, полузакрытыми, вентилируемыми и т.д.
Если говорить про другие виды электродвигателей переменного тока, выпускаемые современной промышленностью, то, несмотря на широкое разнообразие, все они относятся к механически коммутируемым машинам, в которых скорость зависит от напряжения и соединения обмоток.
Заключение
Электродвигатели и приводы широко применяются в различных сферах. Электромоторы переменного тока являются надёжными, недорогими, обладают хорошими эксплуатационными качествами. Низковольтные приводы переменного тока имеют прекрасную репутацию, а количество установленных и эксплуатируемых приводов исчисляется уже на сотни. Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Заказать оборудование
Команда Electrodvigatel.com приглашает к сотрудничеству производителей двигателей
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Существует множество видов электродвигателей, различающихся по конструкции, принципу действия, исполнению и другим характеристикам. Различают основные виды электродвигателей:
По типу протекающего тока двигатели различают:
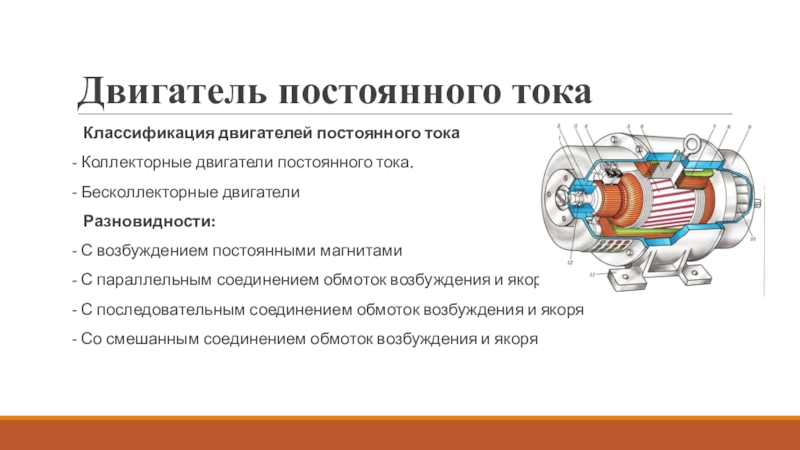
- Электродвигатели постоянного тока.
 Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов.
Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов. - Электродвигатели переменного тока. Нашли широкое применение для приводов всех типов технологического оборудования, автоматических регуляторов, электроинструментов.
По конструкции электрические машины различают с вертикально и горизонтально расположенным валом. Электродвигатели также классифицируют по мощности, климатическому исполнению, степени защиты, назначению и другим характеристикам.
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Однофазные электродвигатели
Трехфазные электродвигатели
Крановые электродвигатели
Лифтовые электродвигатели
Электродвигатели для частотного регулирования
Общепромышленные электродвигатели
Синхронные электродвигатели
Взрывозащищенные электродвигатели
Электродвигатели постоянного тока
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей. Чем больше габарит двигателя – тем меньше производителей на рынке.
Чем больше габарит двигателя – тем меньше производителей на рынке.
Конструкция электродвигателя
Вращающийся электродвигатель состоит из двух главных деталей:
- статора — неподвижная часть
- ротора — вращающаяся часть
У большинства двигателей внутри статора располагается ротор. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Электродвигатель в разрезе — 1 статор, 2 ротор, 3 подшипник
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |

3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Основы двигателей переменного тока и их применение
Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели. Асинхронный двигатель (или асинхронный двигатель) всегда зависит от небольшой разницы в скорости между вращающимся магнитным полем статора. Скорость вала ротора называется скольжением, чтобы индуцировать ток ротора в обмотке переменного тока ротора. В результате асинхронный двигатель не может создавать крутящий момент вблизи синхронной скорости, когда индукция (или скольжение) недоступна.
Синхронный двигатель, напротив, не зависит от индукции скольжения. В нем используются постоянные магниты, выступающие магнитные полюса (обычно сделанные из стальных пластин и называемые явно выраженными полюсами) или обмотка ротора с независимым возбуждением. Синхронный двигатель развивает свой номинальный крутящий момент точно на синхронной скорости.
Общая классификация двигателей. Двумя основными классификациями двигателей переменного тока являются синхронные и асинхронные (также называемые индукционными). (Изображение: Monolithic Power Systems)
(Изображение: Monolithic Power Systems) Асинхронные двигатели
Наиболее распространенные однофазные двигатели переменного тока используют короткозамкнутый ротор, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Двигатель получил свое название от формы «обмоток» его ротора — кольца на обоих концах ротора с стержнями, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Большая часть тока ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь для уменьшения сопротивления ротора.
Простые индукционные машины напрямую подключаются к сети. Типичная характеристика скорости вращения при постоянной частоте статора и напряжении на клеммах показана на рисунке ниже. Синхронная скорость соответствует скорости вращения магнитного поля статора. Машина не создает крутящего момента на синхронной скорости, потому что в обмотках ротора не индуцируется ток. Если ротор вращается с меньшей скоростью, чем поле статора, машина работает в моторном режиме. В противном случае машина работает в режиме генератора. Максимальный крутящий момент, который может быть получен на валу двигателя, называется крутящим моментом. Номинальный крутящий момент определяется как половина крутящего момента на отрыв. Эти машины обычно работают в линейной области между положительным и отрицательным номинальным крутящим моментом, отмеченной зеленой линией на рисунке ниже.
Синхронная скорость соответствует скорости вращения магнитного поля статора. Машина не создает крутящего момента на синхронной скорости, потому что в обмотках ротора не индуцируется ток. Если ротор вращается с меньшей скоростью, чем поле статора, машина работает в моторном режиме. В противном случае машина работает в режиме генератора. Максимальный крутящий момент, который может быть получен на валу двигателя, называется крутящим моментом. Номинальный крутящий момент определяется как половина крутящего момента на отрыв. Эти машины обычно работают в линейной области между положительным и отрицательным номинальным крутящим моментом, отмеченной зеленой линией на рисунке ниже.
Альтернативная конструкция, называемая фазным ротором, используется, когда требуется переменная скорость. В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют токосъемные кольца с контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с фазным ротором с регулируемой скоростью энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор. При двунаправленном управлении мощностью ротор с обмоткой становится активным участником процесса преобразования энергии, при этом конфигурация с двойным питанием от ротора с обмоткой обеспечивает удвоенную плотность мощности.
Угольные щетки соединяют токосъемные кольца с контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с фазным ротором с регулируемой скоростью энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор. При двунаправленном управлении мощностью ротор с обмоткой становится активным участником процесса преобразования энергии, при этом конфигурация с двойным питанием от ротора с обмоткой обеспечивает удвоенную плотность мощности.
По сравнению с роторами с короткозамкнутым ротором двигатели с фазным ротором дороже и требуют обслуживания контактных колец и щеток. Они все еще были стандартной формой для управления переменной скоростью до появления компактных электронных устройств. Твердотельные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все менее распространенными.
Асинхронные двигатели с большим фазным ротором (WRIM) — это хорошо зарекомендовавшая себя технология для промышленного применения.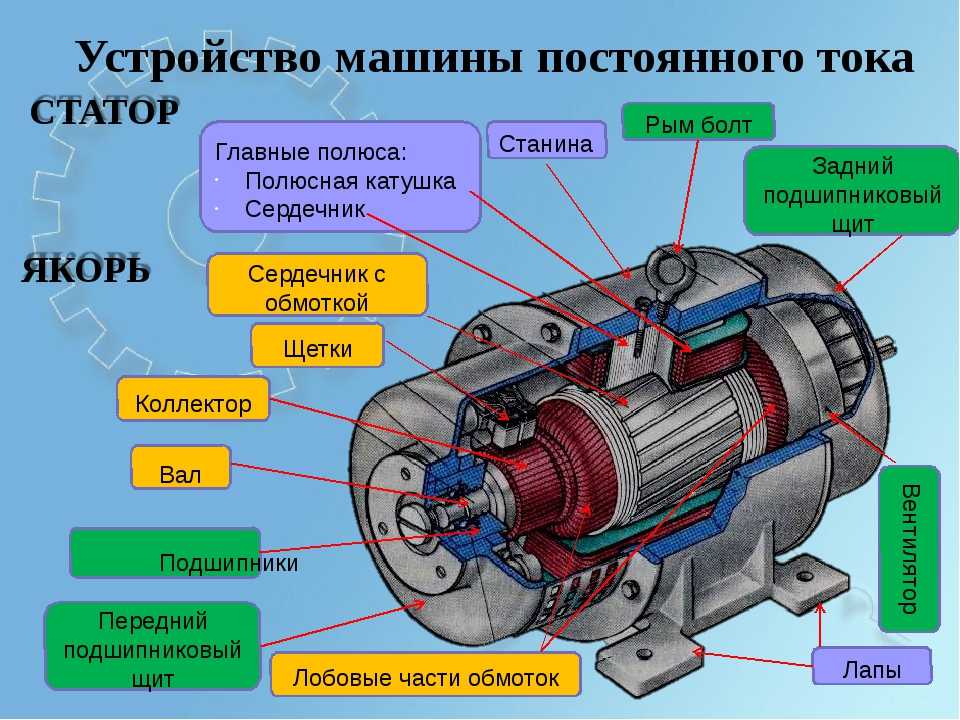 В цементной и горнодобывающей промышленности WRIM высокой мощности используются на крупных мельницах, где они имеют преимущество контролируемых пусковых характеристик и возможности регулировки скорости. Эти двигатели также используются на больших насосах в сфере водоснабжения и очистки сточных вод.
В цементной и горнодобывающей промышленности WRIM высокой мощности используются на крупных мельницах, где они имеют преимущество контролируемых пусковых характеристик и возможности регулировки скорости. Эти двигатели также используются на больших насосах в сфере водоснабжения и очистки сточных вод.
WRIM имеет трехфазный статор, который обычно подключается непосредственно к системе питания. Ротор имеет трехфазную обмотку с тремя выводами, подключенными к отдельным токосъемным кольцам, которые традиционно подключались к реостату или блоку резисторов. Реостат использовался для запуска и мог быть отключен, как только двигатель набрал скорость. Изменяя сопротивление ротора с помощью реостата, можно изменить скорость двигателя. Твердотельные накопители все чаще заменяют реостаты для управления двигателем в этих приложениях.
Синхронные двигатели
Существует несколько вариантов конструкции синхронных двигателей, включая синусоидальные, реактивные, шаговые и гистерезисные. Общим знаменателем является то, что вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и обеспечивает второе синхронизированное вращающееся магнитное поле двигателя переменного тока. Асинхронный двигатель называется двигателем с двойным питанием, если он оснащен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Общим знаменателем является то, что вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и обеспечивает второе синхронизированное вращающееся магнитное поле двигателя переменного тока. Асинхронный двигатель называется двигателем с двойным питанием, если он оснащен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Небольшие синусоидальные синхронные двигатели обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В более мощных промышленных установках синхронный двигатель выполняет две важные функции: Это высокоэффективное средство преобразования энергии переменного тока в работу. И он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
И он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
Реактивный двигатель представляет собой тип электродвигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Ротор не имеет обмоток. Он генерирует крутящий момент за счет магнитного сопротивления. Подтипы реактивных двигателей включают синхронные, переменные, переключаемые и переменные шаговые. Реактивные двигатели могут обеспечивать высокую удельную мощность при низкой стоимости, что делает их привлекательными для многих приложений. К недостаткам относятся высокая пульсация крутящего момента (разница между максимальным и минимальным крутящим моментом за один оборот) при работе на низкой скорости и шум из-за пульсаций крутящего момента. Импульсные реактивные двигатели могут использоваться как очень большие шаговые двигатели с уменьшенным числом полюсов и, как правило, коммутируются по замкнутому контуру. Обычные шаговые двигатели представляют собой разновидность бесщеточных двигателей постоянного тока (BLDC).
Гистерезисные двигатели имеют сплошной гладкий цилиндрический ротор, отлитый из магнито-твердой кобальтовой стали с высокой коэрцитивной силой. Этот материал имеет широкую петлю гистерезиса (высокую коэрцитивную силу), что означает, что после намагничивания в заданном направлении требуется большое обратное магнитное поле для изменения намагниченности. Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать реверсивное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. Результатом этого является то, что ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора.
Преимущество гистерезисного двигателя заключается в том, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускающийся и для его запуска не требуется индукционная обмотка. Двигатели с гистерезисом производятся с номинальной мощностью долей лошадиных сил, в основном в качестве серводвигателей и синхронизирующих двигателей. Более дорогие, чем реактивные, гистерезисные двигатели используются там, где требуется точная постоянная скорость.
Двигатели с гистерезисом производятся с номинальной мощностью долей лошадиных сил, в основном в качестве серводвигателей и синхронизирующих двигателей. Более дорогие, чем реактивные, гистерезисные двигатели используются там, где требуется точная постоянная скорость.
Синхронный двигатель с постоянными магнитами (СДПМ) использует постоянные магниты, встроенные в стальной ротор, для создания постоянного магнитного поля. Статор содержит обмотки, подключенные к источнику переменного тока для создания вращающегося магнитного поля (асинхронный двигатель). При синхронной скорости полюса ротора замыкаются на вращающемся магнитном поле. Синхронные двигатели с постоянными магнитами аналогичны двигателям BLDC.
PMSM в сравнении с производительностью BLDC
Двигатель PMSM можно рассматривать как аналог двигателя переменного тока BLDC. Как и BLDC, PMSM имеет ротор с постоянными магнитами и статор с обмоткой. Работа двигателя PMSM также очень похожа на двигатель BLDC. Однако разница заключается в форме волны обратной ЭДС, которая носит синусоидальный характер. Это связано с тем, что катушки намотаны на статоре синусоидально.
Как и BLDC, PMSM имеет ротор с постоянными магнитами и статор с обмоткой. Работа двигателя PMSM также очень похожа на двигатель BLDC. Однако разница заключается в форме волны обратной ЭДС, которая носит синусоидальный характер. Это связано с тем, что катушки намотаны на статоре синусоидально.
PMSM требует питания переменного тока (синусоидального характера) для достижения наилучшей производительности. Этот тип управляющего тока также снижает шум, производимый двигателем. Преимущества двигателей PMSM:
- Более высокая эффективность, чем у бесщеточных двигателей постоянного тока
- Отсутствие пульсаций момента при коммутации двигателя
- Более высокий крутящий момент и лучшая производительность
- Более надежный и менее шумный, чем другие асинхронные двигатели
- Высокая производительность как при высокой, так и при низкой скорости работы
- Низкая инерция ротора облегчает управление
- Эффективное рассеивание тепла
- Уменьшенный размер двигателя
Стандарты эффективности двигателей переменного тока
Международный стандарт IEC/EN 60034-30 делит эффективность двигателей на пять классов: от IE1 до IE5. Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Разница между классами эффективности IE больше для двигателей меньшего размера. Например, для двигателя мощностью 1 кВт увеличение эффективности между IE1 и IE3 составляет около 13%. Для двигателя мощностью 10 кВт повышение эффективности между IE1 и IE3 составляет всего около 6%
Как отмечалось выше, электронные приводы необходимы для соответствия более высоким стандартам эффективности. Приводы и контроллеры двигателей переменного тока будут в центре внимания четвертого и последнего часто задаваемых вопросов в этой серии.
Справочные материалы
Бесколлекторный двигатель постоянного тока и СДПМ, Embitel
Руководство по двигателю, Infineon Technologies
Основы двигателей и двигатели постоянного тока
Поле-ориентированное управление двигателем, часть 2: реализация
Управление двигателем с ориентацией на поле, Часть 1: Принципы
Основные сведения об электродвигателях переменного, постоянного и ЕС-двигателей (часть 2)…
Основы электродвигателей переменного, постоянного и постоянного тока, часть 1 —…
Типы двигателей переменного тока [Конструкция, принцип работы деталей] Подробнее
В этом посте вы узнаете, что такое двигатели переменного тока , типы двигателей переменного тока и , принцип работы , конструкция , приложения , преимущества и недостатки .
Двигатели переменного тока и типы
Двигатель, который преобразует переменный ток в механическую энергию, известен как воздушный двигатель переменного тока. Асинхронные двигатели — это двигатели переменного тока.
Автор Egzon123 — собственная работа, CC BY-SA 3.0, https://commons.wikimedia.org6Принцип работы двигателей переменного тока
Асинхронный двигатель работает по принципу моментный или асинхронный двигатель работает на комбинированном эффекте электромагнитной индукции и принципа двигателя.
Читайте также: Что такое подшипник? и различные типы подшипников и как работает подшипник?
Конструкция двигателей переменного тока
Трехфазный асинхронный двигатель в основном состоит из двух частей:
- Статор
- Ротор
Статор — это статическая часть, а ротор — вращающаяся часть, обе они разделены небольшим воздушным зазором, который варьируется от 0,4 мм до 4 мм в зависимости от мощности двигателя.
1. Статор
На рисунке показан статор асинхронного двигателя. Он состоит из стальной рамы, в которую заключен полый цилиндрический конус, состоящий из тонких пластин кремнистой стали для уменьшения потерь на вихревые токи и потерь на гистерезис. На внутренней периферии сердечника прорезано большое количество одинаковых прорезей.
В эти пазы помещаются проводники статора, которые изолированы друг от друга, а также от пазов. Проводники соединены как симметричная обмотка звезда или треугольник. Обмотки намотаны на определенный номер. полюсов, в зависимости от требования скорости.
Если нужна высокая скорость, обмотка наматывается на меньшее количество. полюсов и наоборот. Соотношение между скоростью и нет. полюсов определяется как,
Ns=120f/P
где,
- Ns = синхронная скорость в об/мин
- f = частота питания
- P = количество полюсов.
См. также: Катушки индуктивности: типы, характеристики, работа и применение катушек индуктивности
2.
Ротор Ротор крепится на валу двигателя, к которому может быть подключена любая механическая нагрузка. Существует 2 типа роторов, таких как:
- Ротор с короткозамкнутым ротором
- Ротор с фазной обмоткой
Таким образом, если двигатель содержит ротор с короткозамкнутым ротором, то он называется асинхронным двигателем с короткозамкнутым ротором, а если он содержит ротор с фазной обмоткой , то он называется асинхронным двигателем с фазовой обмоткой.
1. Ротор с короткозамкнутым ротором
На рисунке показан ротор с короткозамкнутым ротором, который состоит из цилиндрического ламинированного сердечника с параллельными пазами для несущих проводников ротора. Проводниками ротора являются тяжелые медные или алюминиевые стержни. В каждый слот помещается один брусок.
Все стержни припаяны или приварены с обоих концов к двум медным концевым кольцам, таким образом, они замыкаются накоротко с обоих концов. Поскольку стержни ротора замкнуты накоротко, невозможно добавить внешнее сопротивление последовательно с цепью ротора во время пуска.
Пазы слегка скошены, потому что это уменьшает шум из-за магнитного гула и обеспечивает плавную работу ротора, а также снижает вероятность блокировки между ротором и статором.
2. Ротор с фазной обмоткой
На рисунке показан асинхронный двигатель с фазной обмоткой и расположение соединений ротора. Ротор ламинирован. Цилиндрический сердечник содержит равномерные пазы, в которых размещена трехфазная обмотка, соединенная звездой.
Открытые концы звездообразной обмотки соединены с 3-мя изолированными контактными кольцами, установленными на валу двигателя, с присоединенными к ним угольными щетками. Три щетки подключены к трехфазному реостату, соединенному звездой, который используется в качестве стартера во время пускового периода. Кольца скольжения замыкаются накоротко с помощью металлического кольца во время работы.
Читайте также: Электрическая цепь: типы цепей, закон Кирхгофа и его классификация двигатели
1.
Асинхронные двигатели Обычно используется асинхронный двигатель как электродвигатель переменного тока. В этом двигателе электрический ток в роторе, необходимый для создания крутящего момента, достигается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. Ротор асинхронного двигателя в основном представляет собой ротор с короткозамкнутым ротором или ротор с обмоткой.
Принцип работы
В двигателе постоянного тока электропитание подается как на статор, так и на ротор через щеточное устройство. В асинхронном двигателе мы подводим только один к статору. Когда мы подаем электропитание на обмотку статора, в статоре создается магнитный поток из-за тока, протекающего в катушке.
Обмотка ротора устроена так, что каждая катушка короткозамкнута. Магнитный поток от статора разрезает короткозамкнутую катушку в роторе. Поскольку катушки ротора закорочены, ток начнет течь через катушку ротора. это называется Закон электромагнитной индукции Фарадея.
Когда ток протекает через катушку ротора, в роторе создается другой магнитный поток. Теперь в статоре и роторе два потока. Поток ротора будет отставать от потока статора. Благодаря этому ротор получит крутящий момент, который заставит ротор вращаться в направлении вращающегося магнитного поля.
2. Синхронные двигатели
Синхронный двигатель определяется как «двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой приложенного тока». Он работает как двигатель переменного тока, но здесь общее количество витков, образованных валом, равно целому множителю частоты приложенного тока.
Работа синхронного двигателя не зависит от индукционного тока. В этих типах двигателей, в отличие от асинхронных двигателей, на статоре имеются многофазные электромагниты переменного тока, которые создают вращающееся магнитное поле.
Здесь ротор представляет собой постоянный магнит, который синхронизирован с вращающимся магнитным полем и вращается синхронно с частотой приложенного к нему тока.
Принцип работы
Работа синхронных двигателей зависит от взаимодействия магнитного поля статора с магнитным полем ротора. Статор имеет 3-фазные обмотки и питается от 3-фазной сети.
Следовательно, обмотка статора создает трехфазное вращающееся магнитное поле. Ротор питается от источника постоянного тока. Ротор входит во вращающееся магнитное поле, создаваемое обмоткой статора, и вращается синхронно.
Теперь скорость двигателя зависит от частоты питающего тока. Скорость синхронного двигателя регулируется частотой подаваемого тока. Скорость синхронного двигателя рассчитывается как
Ns=60f/P=120f/p
где,
- f = частота переменного тока (Гц)
- p = общее количество полюсов на фазу
- P = общее количество пар полюсов на фазу
Если нагрузка превышает пробивную приложена нагрузка, двигатель рассинхронизируется. Трехфазная обмотка статора имеет то преимущество, что определяет направление обмотки.
В случае однофазной обмотки невозможно определить направление вращения, и двигатель может запускаться в любом направлении. Эти синхронные двигатели требуют первоначальной настройки для управления направлением вращения.
3. Однофазные двигатели
Однофазный асинхронный двигатель представляет собой двигатель переменного тока, который преобразует электрическую энергию в механическую для выполнения некоторой физической работы. Однофазный асинхронный двигатель требует для своей работы только одну фазу питания. Эти типы двигателей переменного тока обычно используются в маломощных устройствах в бытовых и промышленных целях.
Принцип работы
В этих типах двигателей переменного тока на обмотку статора подается однофазный переменный ток. Это вызывает магнитное поле, которое пульсирует синусоидально.
Через некоторое время полярность поля меняется на противоположную, и переменный ток может не обеспечивать необходимую обмотку двигателя. Но если двигатель приводится в действие внешними средствами, двигатель будет вращаться с ограниченной скоростью.
4. Трехфазные двигатели
Трехфазный двигатель представляет собой тип электродвигателя, который преобразует электрическую энергию в механическую за счет электромагнитных взаимодействий. В случае работы от трехфазного переменного тока (переменного тока) наиболее часто используемым двигателем является трехфазный асинхронный двигатель, поскольку эти типы двигателей переменного тока не требуют дополнительных пусковых устройств.
Двигатели такого типа называются самозапускающимися асинхронными двигателями. Трехфазный асинхронный двигатель состоит из статора и ротора.
Принцип работы
Когда эти типы двигателей переменного тока заряжаются от трехфазного источника питания, обмотка статора создает постоянное магнитное поле со 120 смещениями постоянной величины, которое вращается с синхронной скоростью.
Согласно теории электромагнитного поля Фарадея, переменное магнитное поле разрезает проводники ротора и генерирует в них ток. Когда эти проводники ротора укорачиваются, по этим проводникам начинает течь ток.
При наличии магнитного поля статора размещают проводники ротора. Следовательно, согласно теории силы Лоренца, на проводник ротора действует механическая сила. Таким образом, все проводники ротора прикладывают силу, то есть сумма механических сил создает крутящий момент в роторе, который перемещает его в том же направлении, что и вращающееся магнитное поле.
Вращение этого проводника ротора также можно объяснить законом Ленца, который гласит, что токи, индуцируемые в роторе, противодействуют причине его возникновения, здесь это сопротивление вращает магнитное поле.
В результате ротор начинает вращаться в том же направлении, что и статор, вращая магнитное поле. Если скорость ротора больше скорости статора, то в роторе не будет генерироваться ток, потому что причиной вращения ротора является относительное движение ротора и магнитного поля статора.
Разница между полями статора и ротора называется скольжением. Трехфазный двигатель называется асинхронным из-за этой относительной разницы скоростей между статором и ротором.
5. Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором представляет собой тип трехфазного асинхронного двигателя, основанный на законе электромагнетизма. Это называется «двигатель с короткозамкнутым ротором», потому что ротор внутри него известен как ротор с короткозамкнутым ротором, потому что он выглядит как короткозамкнутый ротор.
Этот ротор представляет собой стальной цилиндр, поверхность которого состоит из высокопроводящего металла (обычно из алюминия или меди). Когда переменный ток проходит через обмотки статора, создается вращающееся магнитное поле.
Это создает ток в обмотке ротора, который создает собственное магнитное поле. Взаимодействие магнитных полей, создаваемых обмоткой статора и ротора, создает крутящий момент на короткозамкнутом роторе.
Основное преимущество двигателя с короткозамкнутым ротором заключается в том, насколько эффективно можно изменять его характеристики скорости и крутящего момента. Этого можно добиться, регулируя размер стержней в роторе. Эти типы двигателей используются в различных отраслях промышленности, поскольку они надежны, самозапускающиеся и легко адаптируются.
Принцип работы
Когда на обмотку статора подается трехфазное питание, в пространстве создается вращающееся магнитное поле. Это вращающееся магнитное поле имеет скорость, известную как синхронная скорость.
Это вращающееся магнитное поле статора индуцирует напряжения в стержнях ротора, и поэтому в стержнях ротора начинают протекать токи короткого замыкания. Эти токи ротора создают собственное магнитное поле, которое объединяется с полем статора. Теперь поле ротора попытается противостоять своей причине, и поэтому ротор начнет следовать за вращающимся магнитным полем.
В тот момент, когда ротор подхватывает вращающееся магнитное поле, ток ротора падает до нуля, потому что нет большего относительного движения между вращающимся магнитным полем и ротором. Следовательно, в это время ротор испытывает нулевую тангенциальную силу, поэтому ротор мгновенно разрушается.
После разрушения ротора относительное движение между ротором и вращающимся магнитным полем восстанавливается, следовательно, ток ротора восстанавливается.
Итак, снова тангенциальная сила восстанавливается при вращении ротора, и поэтому снова ротор начинает вращаться магнитным полем, и поэтому ротор сохраняет постоянную скорость, которая меньше скорости вращения магнитного поля или синхронную скорость.
6. Двигатель с фазной обмоткой или двигатель с фазным ротором
Асинхронные двигатели управляют промышленным миром уже много лет. В асинхронных двигателях, используемых в лифтах и подъемниках, вы можете увидеть тип ротора, называемый ротором с контактными кольцами, в то время как в большинстве других применений вы можете увидеть простой ротор с короткозамкнутым ротором.
Обычный асинхронный двигатель или двигатель с короткозамкнутым ротором создает очень низкий пусковой крутящий момент, и в некоторых случаях такой низкий пусковой крутящий момент вызывает серьезные проблемы. Именно в этих условиях используются асинхронные двигатели с контактными кольцами, так как они обеспечивают высокий пусковой момент.
Преимущества двигателей переменного тока
Ниже перечислены преимущества двигателей переменного тока:
- Доступен по низкой цене.
- Имеет вариации скорости.
- Низкая стоимость обслуживания.
- Двигатель переменного тока имеет высокий коэффициент мощности.
- Работает надежно.
- Простой дизайн.
Недостатки двигателей переменного тока
Ниже перечислены недостатки двигателей переменного тока:
- Он будет создавать вихревые токи из-за создания противо-ЭДС.
- Невозможность работы на малой скорости.
- Плохое управление позиционированием.
Применение двигателей переменного тока
Ниже приведены области применения двигателей переменного тока:
- Двигатели с короткозамкнутым ротором
- Используются в промышленных приводах водяных насосов, трубчатых колодцев, токарных станков, сверл и т.

- Используются в промышленных приводах водяных насосов, трубчатых колодцев, токарных станков, сверл и т.
