Какие существуют основные типы контроллеров. Чем отличаются контроллеры для домашней и промышленной автоматизации. Как выбрать оптимальный контроллер под конкретную задачу. Каковы преимущества и недостатки разных видов контроллеров.
Что такое контроллер и для чего он нужен
Контроллер — это ключевой элемент системы автоматического управления, который обрабатывает входные сигналы и генерирует управляющие воздействия для достижения заданных параметров работы.
Основные функции контроллера:
- Сбор и обработка данных от датчиков
- Сравнение текущих значений с заданными
- Формирование управляющих сигналов для исполнительных механизмов
- Поддержание заданных параметров работы системы
- Обмен данными с другими устройствами и системами
Контроллеры применяются практически во всех современных автоматизированных системах — от бытовой техники до сложных промышленных комплексов.
Классификация контроллеров по назначению
По сфере применения контроллеры можно разделить на две большие группы:

Бытовые (домашние) контроллеры
Используются для автоматизации различных систем в жилых помещениях:
- Управление освещением
- Регулирование отопления и кондиционирования
- Контроль доступа и безопасности
- Управление бытовой техникой
- Мультимедийные системы
Промышленные контроллеры
Применяются на производственных предприятиях для автоматизации технологических процессов:
- Управление производственным оборудованием
- Контроль параметров технологических процессов
- Сбор и обработка данных с датчиков
- Регулирование работы инженерных систем
- Обеспечение безопасности производства
Типы контроллеров по принципу действия
По принципу формирования управляющего воздействия выделяют следующие основные типы контроллеров:
Двухпозиционные (релейные) контроллеры
Простейший тип контроллеров с дискретным выходным сигналом. Имеют только два состояния выхода — включено/выключено. Применяются для простых задач регулирования, например, поддержание температуры в помещении.
Пропорциональные (П) контроллеры
Формируют управляющий сигнал пропорционально отклонению регулируемой величины от заданного значения. Обеспечивают плавное регулирование, но имеют статическую ошибку.

Интегральные (И) контроллеры
Учитывают интегральную сумму отклонений во времени. Позволяют устранить статическую ошибку регулирования, но имеют более медленный отклик.
Пропорционально-интегральные (ПИ) контроллеры
Сочетают преимущества П- и И-регуляторов. Обеспечивают нулевую статическую ошибку и хорошее быстродействие. Широко применяются в промышленности.
Пропорционально-интегрально-дифференциальные (ПИД) контроллеры
Наиболее совершенный тип регуляторов. Дополнительно учитывают скорость изменения отклонения. Обеспечивают высокую точность и быстродействие регулирования.
Особенности конструкции контроллеров
Несмотря на различия в назначении и принципах работы, большинство современных контроллеров имеют схожую базовую архитектуру:
- Центральный процессор — выполняет основные вычисления и алгоритмы управления
- Память — хранит программу и данные
- Модули ввода/вывода — для подключения датчиков и исполнительных устройств
- Интерфейсы связи — для обмена данными с другими системами
- Источник питания
- Корпус с креплением на DIN-рейку (для промышленных контроллеров)
Ключевые характеристики контроллеров:

- Быстродействие процессора
- Объем памяти
- Количество входов/выходов
- Поддерживаемые интерфейсы и протоколы
- Диапазон рабочих температур
- Степень защиты корпуса
Программируемые логические контроллеры (ПЛК)
Программируемые логические контроллеры (ПЛК) — это наиболее распространенный тип промышленных контроллеров. Их ключевые особенности:
- Возможность свободного программирования алгоритмов управления
- Модульная конструкция с возможностью расширения
- Поддержка различных языков программирования (LAD, FBD, ST и др.)
- Высокая надежность и отказоустойчивость
- Работа в режиме реального времени
ПЛК широко применяются для автоматизации технологических процессов в различных отраслях промышленности.
Контроллеры для систем «умный дом»
Для домашней автоматизации используются специализированные контроллеры с рядом особенностей:
- Компактные размеры корпуса
- Простота настройки и эксплуатации
- Поддержка беспроводных технологий (Wi-Fi, Zigbee и др.)
- Наличие мобильных приложений для управления
- Возможность интеграции с голосовыми помощниками
- Модульная архитектура для гибкого расширения системы
Такие контроллеры позволяют создавать удобные и функциональные системы «умный дом» без сложного программирования.

Выбор оптимального типа контроллера
При выборе контроллера для конкретной задачи автоматизации следует учитывать ряд факторов:
- Сложность и масштаб автоматизируемого процесса
- Требуемое быстродействие и точность регулирования
- Количество входов/выходов и типы сигналов
- Условия эксплуатации (температура, влажность, вибрации)
- Необходимость интеграции с другими системами
- Требования к надежности и отказоустойчивости
- Бюджет проекта
Правильный выбор типа и модели контроллера позволит создать эффективную и надежную систему автоматизации с оптимальным соотношением цены и функциональности.
Виды контроллеров и сферы их применения
Главная » Оборудование
Автор Олег Ефремцев На чтение 2 мин Просмотров 82 Опубликовано
Содержание
- Чем контроллер может управлять
- Домашние
- Производственные
- Особенности конструкции
- Как контроллер взаимодействует: каналы связи
Контроллеры предназначены для управления различными электронными устройствами. Сердцем контроллера является микроконтроллер, который объединяет процессор, память и остальную периферию на одной плате. Контроллеры подразделяются на аналоговые, универсальные и модульные, а по назначению на комнатные и промышленные https://sbtpro.ru/kontrolleri/.
Чем контроллер может управлять
По назначению контроллеры можно условно разделить на бытовые и промышленные.
Домашние
Можно использовать контроллеры для управления одним устройством отдельно, а также в популярном ныне комплексе «Умный дом». Их применяют для управления следующими системами:
Их применяют для управления следующими системами:
- занавески и жалюзи;
- регулирование систем кондиционирования и вентиляции;
- контроль за уровнем освещенности в комнате;
- теплые полы и регулирование батарей центрального отопления;
- музыкальная установка и т.д.
Производственные
В промышленности контроллеры выполняют роль центра автоматического или полуавтоматического управления за механизмами и оборудованием. Примеры использования контроллеров в продакшене:
- Металлургические и металлообрабатывающие заводы при помощи автоматизации управляют обрабатывающими станками, прессами, печами и другому подобному оборудованию с высокими требованиями к точному результату.
- В химической промышленности контроллеры автоматически управляют за дозированием и перемешиванием компонентов.
- На производстве обязательна установка различных систем безопасности и они конечно же используют контроллеры. С помощью них управляют различными сигнализациями, постами безопасности, защитных стен и автоматических ворот.

Особенности конструкции
Большинство контроллеров построены по-разному. Однако все эти устройства имеют общие составляющие:
- основная (центральная) микросхема. Ей регулируются все действия;
- для сохранения данных устанавливается аккумулятор;
- часы, чтобы синхронизироваться с другими приборами и устройствами;
- интерфейс, который принимает входные параметры и отправляет выходные;
- изменяющая напряжение между устройствами схема.
Как контроллер взаимодействует: каналы связи
Существуют различные типы связи между удаленными механизмами, датчиками и центральным управляющим контроллером. Тип используемого подключения зависит от заложенных производителем возможностей панели управления и промежуточных модулей. Также можно использовать смешанный тип общения. Модули могут быть соединены между собой через порты RS или LAN.
Самыми простыми является подключение элементов через многобитовую шину. Автономный блок питания, пульт, индикаторы и множество проводов, направленных на все контролируемые объекты и датчики.
Такой вариант системы стоит недорого, но большое количество соединительных кабелей усложняет в установку, выглядит громоздкой, а схемы трудночитаемыми. Но будет надежной и можно применять на больших площадях. Варианты связи через COM, LAN или RS-485.
Типы контроллеров, используемых в системах контроля и управления доступом (СКУД) — советы профессионалов
В своей предыдущей статье про организацию СКУД в офисе я вскользь касался основных элементов СКУД.
В этой статье я хочу подробнее рассказать про контроллеры СКУД – ведь понимание принципов работы и основных характеристик позволит оптимально подобрать комплектующие для организации СКУД в офисе, здании или территориально разделенную систему, к примеру, между офисами в разных городах. Контроллер – это фактически сердце любой Системы Контроля и Управления Доступом. Задача контроллера – принять информацию от считывателя код метки пользователя и принять решение открывать дверь или нет. Контроллеры бывают нескольких видов.
Контроллер автономной СКУД
Обычно применяется, когда надо установить контроль только над одной дверью, без необходимости объединения контроллеров в сеть. Контроллер автономной СКУД обычно дешевый, часто поставляется даже без простейшего корпуса. Классическим примером является контроллер СКУД Z5R производства компании Пульсар-Телеком.
Отличительно чертой этого контроллера является крайняя миниатюрность. Размеры составляют всего 45х25х14 мм. Контроллер можно установить прямо в некоторые модели электромагнитных замков. Контроллер позволяет хранить в своей памяти до 1364 ключей типа Touch memory или RFid, работает при температуре окружающего воздуха от -40С до +50С, имеет встроенный светодиодный индикатор и звуковой сигнал (зуммер). Напряжение питания контроллера – традиционные 12В. Надо помнить, что контроллер СКУД Z5R работает только с бесконтактными считывателями, имеющими интерфейс TM.
В розничной продаже также имеется контроллер в исполнении Z-5R case. Фактически, это контроллер Z5R с полностью идентичным функционалом, но помещенный в пластиковый корпус. Такое исполнение, безусловно, более удобно и позволяет защитить плату от механических воздействий.
Фактически, это контроллер Z5R с полностью идентичным функционалом, но помещенный в пластиковый корпус. Такое исполнение, безусловно, более удобно и позволяет защитить плату от механических воздействий.
Инструкцию по установке и настройке контроллеров Z5R вы можете скачать с нашего сайта
Контроллер автономной СКУД, совмещенный со считывателем
Очень удобная и широко распространенная система. Позволяет с минимальными финансовыми и трудовыми затратами сделать СКУД, к примеру, небольшого офиса, человеку обладающему начальными техническими знаниями. Мы предлагаем использовать контроллер Matrix II k тоже производства компании Пульсар-Телеком.
Розничная цена контроллера Matrix II k в нашем интернет-магазине составляет всего 1150 руб (на дату написания статьи), но при этом покупатель получает очень широкой функционал —
накладной считыватель карт стандарта Em-Marin, совмещенный со считывателем и имеющий светодиодный и звуковой индикаторы, возможность управления электромагнитными или электромеханическими замками. Matrix II k имеет рабочую температуру от -40С до +50С. Программирование контроллера, добавление и удаление карт выполняется так называемым мастер-ключем, а фактически обычной карточкой доступа, которую пользователь назначает главной при первичной настройке контроллера или после сброса его к заводским настройкам. Описание и инструкцию по настройке контроллера Matrix II k вы можете скачать с нашего сайта.
Matrix II k имеет рабочую температуру от -40С до +50С. Программирование контроллера, добавление и удаление карт выполняется так называемым мастер-ключем, а фактически обычной карточкой доступа, которую пользователь назначает главной при первичной настройке контроллера или после сброса его к заводским настройкам. Описание и инструкцию по настройке контроллера Matrix II k вы можете скачать с нашего сайта.
Контроллер сетевой СКУД
Используется, когда надо объединить под единым управлением несколько точек прохода. В общем случае, это может быть сеть точек прохода соседних офисов, проходной и административных помещений бизнес-центра, управление доступом в номера гостиниц и т.д. Наша организация имеет опыт организации сетевой СКУД, когда центральный компьютер с базой ключей находился на другом континенте, и управляет учетом рабочего времени и пропуском сотрудников в нескольких разбросанных по миру филиалах компании Заказчика.
Сетевые контроллеры общаются между собой и с центральным сервером, используя определенный протокол передачи данных. В настоящий момент используются 2 протокола: TCP/IP и RS-485. Связывая контроллеры по протоколу TCP/IP можно задействовать существующую СКС здания, или создать территориально-разделенную систему через сеть Internet. Основная схема организации СКУД на контроллерах, поддерживающих протокол TCP/IP приведена ниже:
В настоящий момент используются 2 протокола: TCP/IP и RS-485. Связывая контроллеры по протоколу TCP/IP можно задействовать существующую СКС здания, или создать территориально-разделенную систему через сеть Internet. Основная схема организации СКУД на контроллерах, поддерживающих протокол TCP/IP приведена ниже:
Основной недостаток в случае функционирования контроллеров по протоколу TCP/IP – это ограничения, которые накладываются на СКС. В частности – максимальная длина горизонтального сегмента по меди. Если контроллеры расположены на расстоянии более 100 м от сетевого концентратора, потребуется вносить изменения в топологию сети (промежуточные репитеры, использование оптических или радиоканалов и т.п.). Но, в любом случае, использование сетевых контроллеров на базе протокола TCP IP является в настоящий момент наиболее прогрессивной и активно развивающийся технологией.
Рассмотрение конкретных контроллеров и их функционала, а также совместную работу контроллеров по протоколу RS-485 мы проведем в последующих статьях.
Что такое контроллеры? Типы контроллеров
Контроллер — это в основном блок, присутствующий в системе управления, который генерирует управляющие сигналы для уменьшения отклонения фактического значения от желаемого значения почти до нуля или минимально возможного значения. Он отвечает за управляющее действие системы, чтобы получить точный результат.
Метод подачи управляющего сигнала контроллером известен как управляющее воздействие.
На рисунке ниже представлена блок-схема промышленного контроллера:
Обычно отклонение достигнутого выходного сигнала от эталонного входного сигнала является сигналом ошибки, который необходимо компенсировать контроллером, чтобы система генерировала требуемый выходной сигнал.
В нашей предыдущей статье о системах управления мы уже обсуждали, что система управления управляет системой для обеспечения любого конкретного результата.
Таким образом, в системе управления контроллер обеспечивает желаемое управление системой, чтобы получить необходимый результат. Здесь, в этой статье, мы обсудим различные типы контроллеров.
Здесь, в этой статье, мы обсудим различные типы контроллеров.
Прежде чем обсуждать различные типы контроллеров, необходимо знать режимы работы контроллеров. Это так, потому что различные типы контроллеров происходят из разных режимов работы.
Итак, в основном есть два режима работы:
Давайте сначала разберемся, что такое прерывистый режим.
Прерывистый
Прерывистый режим работы контроллера допускает дискретное выходное значение. В этом режиме выходной сигнал не показывает плавных изменений в соответствии с сигналом, генерируемым контроллером, а показывает колебания от одного значения к другому.
По этому режиму работы регуляторы бывают двух типов:
- Двухпозиционные / двухпозиционные регуляторы
- Многопозиционные регуляторы
Непрерывный
Этот режим обеспечивает плавное изменение регулируемого выхода во всем рабочем диапазоне. Выходной сигнал системы управления показывает непрерывное изменение пропорционально всему сигналу ошибки или какой-либо его форме.
Таким образом, на основе применяемого ввода контроллеры в основном классифицируются как:
- Пропорциональный регулятор
- Встроенный контроллер
- Производный контроллер
Итак, давайте теперь разберемся с каждым типом контроллера.
Двухпозиционные регуляторы
Они также известны как двухпозиционные регуляторы. Здесь выход контроллера колеблется между двумя конкретными значениями, как правило, максимальным и минимальным значением.
Максимальное значение обычно считается равным 100 %, а минимальное — 0 %.
Это самый простой и распространенный тип управляющего воздействия контроллера. Здесь выходные данные показывают изменение между максимальным и минимальным значениями в соответствии с сигналом ошибки срабатывания.
Обычно выход изменяется с минимального значения на максимальное, когда значение сигнала ошибки срабатывания превышает критическое значение.
Аналогичным образом выход уменьшается до минимального значения с максимального значения, когда значение сигнала ошибки падает ниже критического значения.
Предположим, что m является выходом контроллера, e представляет собой сигнал ошибки срабатывания, а m 1 и m 2 представляют максимальное и минимальное значение соответственно.
Тогда математически мы можем записать это как:
На рисунке ниже представлена блок-схема двухпозиционного регулятора:
Примечательно, что в случае двухпозиционных регуляторов каждый раз, когда ошибка увеличивается или уменьшается через 0 то существует перекрытие. Это перекрытие приводит к диапазону ошибок, и этот диапазон ошибок известен как мертвая зона.
Примерами систем, использующих двухпозиционные регуляторы, являются система обогрева помещения, система контроля уровня жидкости в водяных баках, кондиционеры и т. д.
Пропорциональный контроллер
В этом типе контроллера поддерживается пропорциональная линейная зависимость между регулируемой переменной и управляющим сигналом ошибки.
Предположим, что m — это выходной сигнал регулятора, а e — сигнал ошибки, тогда для пропорционального регулятора его можно записать как
Здесь K P — постоянная пропорционального усиления, определяющая соотношение между регулируемым выходным сигналом и сигналом ошибки. .
.
В терминах преобразования Лапласа приведенное выше уравнение может быть записано как:
Таким образом,
Таким образом, мы можем сказать, что в данном случае каждое значение ошибки обеспечивает уникальный вывод контроллера.
Как мы уже говорили, существует линейная зависимость между выходным сигналом контроллера и сигналом ошибки. Но на выходе контроллера не должно быть 0, потому что 0 значение сигнала ошибки приведет к остановке процесса.
Таким образом, для ошибки нуля вывод будет:
: м o — управляемый выход в случае ошибки нуля .
Этот тип контроллера допускает как прямое так и обратное действие . Это связано с тем, что ошибка может быть как положительной, так и отрицательной в зависимости от разности опорного входа и сигнала обратной связи.
Когда с увеличением входа контроллера увеличивается и его выход, то это известно как действие прямого управления .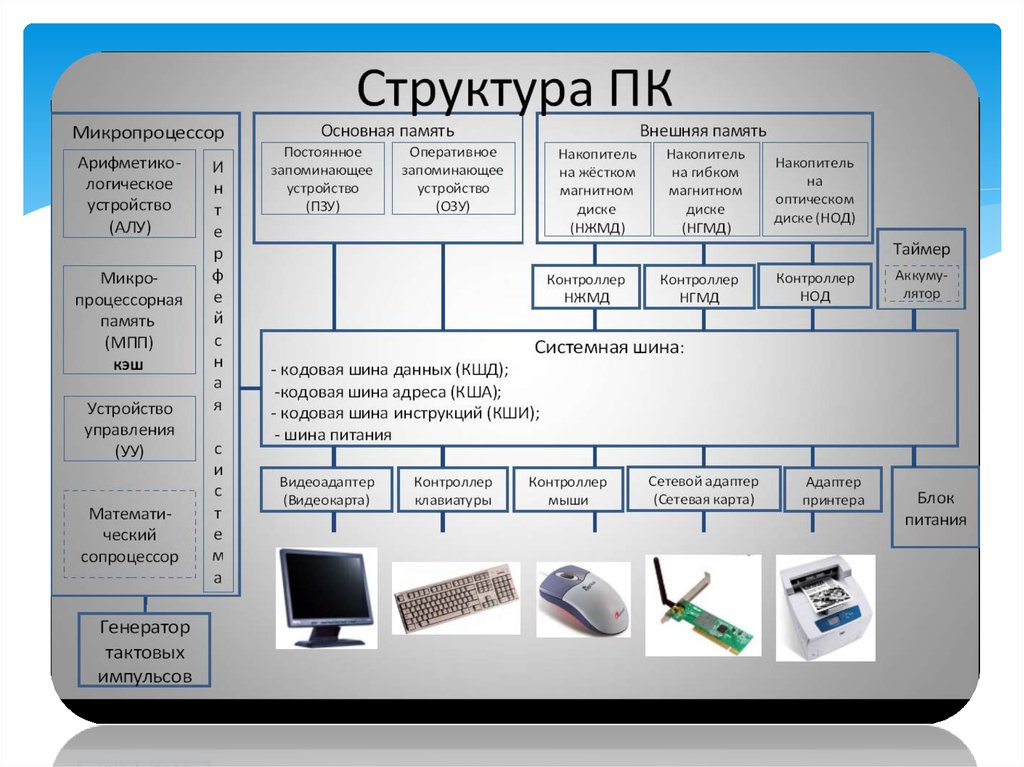
Если увеличение входных данных приводит к уменьшению выходных данных и наоборот, то это называется обратное действие .
Интегральный контроллер
Контроллер с типом управляющего воздействия, в котором скорость изменения выходного сигнала пропорциональна управляющему сигналу ошибки, известен как интегральный контроллер.
Математически это может быть записано как
: Ki представляет собой константу
Таким образом, приведенное выше уравнение можно записать как
: m(0) — выход контроллера при t = 0
30002 В случае интегрирующего регулятора скорость изменения выходного сигнала регулятора зависит от постоянной времени интегрирования до тех пор, пока сигнал временной ошибки не станет равным 0. Таким образом, говорят, что он сравнительно медленнее, чем пропорциональный регулятор.
Здесь для получения заметного результата требуется сравнительно больше времени. Но в этом случае обработка продолжается до тех пор, пока сигнал временной ошибки не станет равным нулю.
Производный контроллер
В производном контроллере выход контроллера зависит от скорости изменения сигнала ошибки.
Практически можно сказать, что ошибка является функцией времени и в любой данный момент времени она может быть равна 0. Однако необязательно, чтобы она оставалась равной нулю даже после этого момента времени.
Таким образом, должно быть какое-то действие, определяющее скорость изменения сигнала ошибки. Иногда его также называют режимом действия скорости контроллера.
Таким образом, это дается как:
: Kd обозначает постоянную производной усиления, которая показывает величину изменения выходного сигнала контроллера для каждой скорости изменения сигнала ошибки срабатывания в секунду.
Для приведенного выше уравнения преобразование Лапласа задается как
Или мы можем записать его как
Следовательно, мы можем сказать, что каждая скорость изменения сигнала ошибки обеспечивает существенно различное значение выходного сигнала контроллера.
Он служит благоприятным фактором для системы, поскольку каждый раз выходной сигнал меняется в зависимости от изменения сигнала ошибки, тем самым обеспечивая значительный скорректированный выходной сигнал до того, как ошибка достигнет большого значения.
Практически эти режимы по отдельности не используются, используется комбинация этих режимов.
Таким образом, комбинации следующие :
- Пропорционально-интегральный регулятор : Этот тип регулятора формируется за счет слияния пропорционального и интегрального регулирующего воздействия.
Математическое выражение для этого типа регулятора имеет следующий вид:
: m(0) представляет начальный выходной сигнал при t = 0 .
- Пропорционально-дифференциальный контроллер : Когда действие пропорционального управления последовательно комбинируется с действием дифференциального управления, это называется пропорционально-дифференциальным контроллером.

Математически это выражается как:
- Пропорционально-интегрально-дифференциальный регулятор : Управляющее действие, объединяющее все три режима, т.е. пропорциональный, интегральный и производный, известно как пропорциональный, интегральный и производный регулятор или ПИД-регулятор .
Математически это задается как:
Итак, это все о контроллере и его типах.
Какие существуют типы контроллеров заряда солнечной батареи? l Корпорация Morningstar
Существует два основных типа контроллеров заряда солнечных батарей:
- Контроллеры с широтно-импульсной модуляцией (ШИМ)
- Контроллеры отслеживания максимальной мощности (MPPT)
Как показано в таблице ниже, ШИМ-контроллеры, как правило, имеют меньшие размеры и работают при напряжении батареи, тогда как в контроллерах MPPT используется более новая технология для работы при максимальном напряжении питания. Это максимизирует количество производимой энергии, что становится более значительным в более холодных условиях, когда напряжение массива становится все больше и больше, чем напряжение батареи. Контроллеры MPPT также могут работать с гораздо более высокими напряжениями и более низкими токами массива, что может означать меньшее количество параллельных цепочек и меньшие размеры проводов, поскольку падение напряжения меньше.
Это максимизирует количество производимой энергии, что становится более значительным в более холодных условиях, когда напряжение массива становится все больше и больше, чем напряжение батареи. Контроллеры MPPT также могут работать с гораздо более высокими напряжениями и более низкими токами массива, что может означать меньшее количество параллельных цепочек и меньшие размеры проводов, поскольку падение напряжения меньше.
ШИМ-контроллеры необходимо использовать с массивами, соответствующими напряжению батареи, что ограничивает количество используемых модулей. Существует множество 60-элементных модулей с максимальным напряжением питания (Vmp), равным примерно 30 В, которые можно использовать с контроллерами MPPT, но они просто не подходят для контроллеров PWM.
Чтобы ответить на вопрос: Что лучше, ШИМ или MPPT? При прочих равных MPPT — это более новая технология, которая собирает больше энергии. Однако преимущества MPPT по сравнению с ШИМ-контроллерами имеют свою цену, поэтому иногда более дешевый ШИМ-контроллер может быть правильным выбором, особенно для небольших систем и в теплом климате, где усиление MPPT не столь значительно.
Сравнение PWM и MPPT солнечных контроллеров заряда
| ШИМ-контроллеры | Контроллеры MPPT |
|---|---|
| Напряжение массива «понизилось» до напряжения батареи | Преобразование избыточного входного напряжения в силу тока |
| Обычно работают ниже Vmp | Работать на Vmp |
| Подходит для конфигураций с небольшими модулями | Подходит для конфигураций с большими модулями, которые имеют более низкую стоимость в расчете на ватт |
| Часто выбирается для очень жаркого климата, который не обеспечивает такого сильного усиления MPPT | Обеспечивает большее усиление, чем ШИМ, особенно в холодные дни и/или при низком напряжении батареи |
Все контроллеры солнечной зарядки Morningstar PWM и MPPT перечислены на странице серии продуктов Morningstar. Каждый указанный продукт имеет гипертекстовую ссылку на страницу продукта, которая включает технические описания, руководства по эксплуатации и другую полезную информацию.
ШИМ-зарядка
Традиционные солнечные регуляторы с зарядкой с ШИМ (широтно-импульсной модуляцией) работают путем прямого подключения солнечной батареи к аккумуляторной батарее. Во время групповой зарядки, когда существует непрерывное соединение массива с аккумуляторной батареей, выходное напряжение массива «снижается» до напряжения батареи. Напряжение батареи немного увеличивается в зависимости от величины тока, обеспечиваемого массивом, а также размера и характеристик батареи.
Зарядка MPPT
Контроллеры Morningstar MPPT оснащены технологией TrakStar, предназначенной для быстрого и точного определения Vmp (максимального напряжения питания) солнечной батареи. Контроллеры TrakStar MPPT «сканируют» солнечный вход, чтобы определить напряжение, при котором массив производит максимальное количество энергии. Контроллер собирает энергию от массива при этом напряжении Vmp и преобразует его в напряжение батареи, повышая при этом зарядный ток.
Почему лучше выбирать ШИМ, а не MPPT
Предыдущее обсуждение ШИМ и MPPT может вызвать у некоторых удивление, почему ШИМ-контроллер вообще был выбран в пользу контроллера MPPT. Действительно, есть случаи, когда ШИМ-контроллер может быть лучшим выбором, чем MPPT, и есть факторы, которые уменьшат или сведут на нет преимущества, которые может предоставить MPPT. Наиболее очевидным соображением является стоимость. Контроллеры MPPT, как правило, стоят дороже, чем их аналоги PWM. При выборе контроллера необходимо проанализировать дополнительные затраты на MPPT с учетом следующих факторов:
Действительно, есть случаи, когда ШИМ-контроллер может быть лучшим выбором, чем MPPT, и есть факторы, которые уменьшат или сведут на нет преимущества, которые может предоставить MPPT. Наиболее очевидным соображением является стоимость. Контроллеры MPPT, как правило, стоят дороже, чем их аналоги PWM. При выборе контроллера необходимо проанализировать дополнительные затраты на MPPT с учетом следующих факторов:
1. Зарядные устройства с низким энергопотреблением (в частности, с малым током) могут иметь такой же или лучший сбор энергии при использовании ШИМ-контроллера. ШИМ-контроллеры будут работать с относительно постоянной эффективностью сбора данных независимо от размера системы (при прочих равных условиях эффективность будет одинаковой при использовании массива 30 Вт или массива 300 Вт). Регуляторы MPPT обычно имеют заметно сниженную эффективность сбора данных (по сравнению с их пиковой эффективностью) при использовании в приложениях с низким энергопотреблением. Кривые эффективности для каждого контроллера Morningstar MPPT напечатаны в соответствующих руководствах и должны быть рассмотрены при принятии решения регулирующим органом. (Руководства доступны для загрузки на веб-сайте Morningstar).
2. Наибольшее преимущество регулятора MPPT будет наблюдаться в более холодном климате (Vmp выше). И наоборот, в более жарком климате Vmp снижается. Уменьшение Vmp уменьшит урожай MPPT по сравнению с PWM. Средняя температура окружающей среды в месте установки может быть достаточно высокой, чтобы свести на нет любые преимущества зарядки MPPT по сравнению с PWM. В такой ситуации было бы неэкономично использовать MPPT. Средняя температура на объекте должна учитываться при выборе регулятора
3. Системы, в которых выходная мощность массива значительно превышает мощность, потребляемую системными нагрузками, означает, что батареи большую часть времени будут находиться в состоянии полного или почти полного заряда. Такая система может не выиграть от увеличенной способности сбора данных регулятора MPPT. Когда аккумуляторы системы полностью заряжены, избыточная солнечная энергия не используется. Преимущество MPPT при сборе урожая может быть ненужным в этой ситуации, особенно если автономность не является фактором.
Зачем выбирать MPPT вместо PWM
Увеличение сбора энергии:
Контроллеры MPPT работают с напряжением массива выше напряжения батареи и увеличивают сбор энергии от солнечных батарей на 5–30% по сравнению с контроллерами PWM, в зависимости от климатических условий.
Рабочее напряжение и сила тока массива регулируются в течение дня контроллером MPPT таким образом, чтобы выходная мощность массива (сила тока X напряжение) была максимальной.
Меньше модулей Ограничения:
Поскольку контроллеры MPPT работают с массивами при напряжении, превышающем напряжение батареи, их можно использовать с более широким спектром солнечных модулей и конфигураций массивов. Кроме того, они могут поддерживать системы с проводами меньшего сечения.
Поддержка массивов увеличенного размера
В отличие от ШИМ-контроллеров, контроллеры MPPT могут поддерживать массивы увеличенного размера, которые в противном случае превышали бы пределы максимальной рабочей мощности контроллера заряда.
