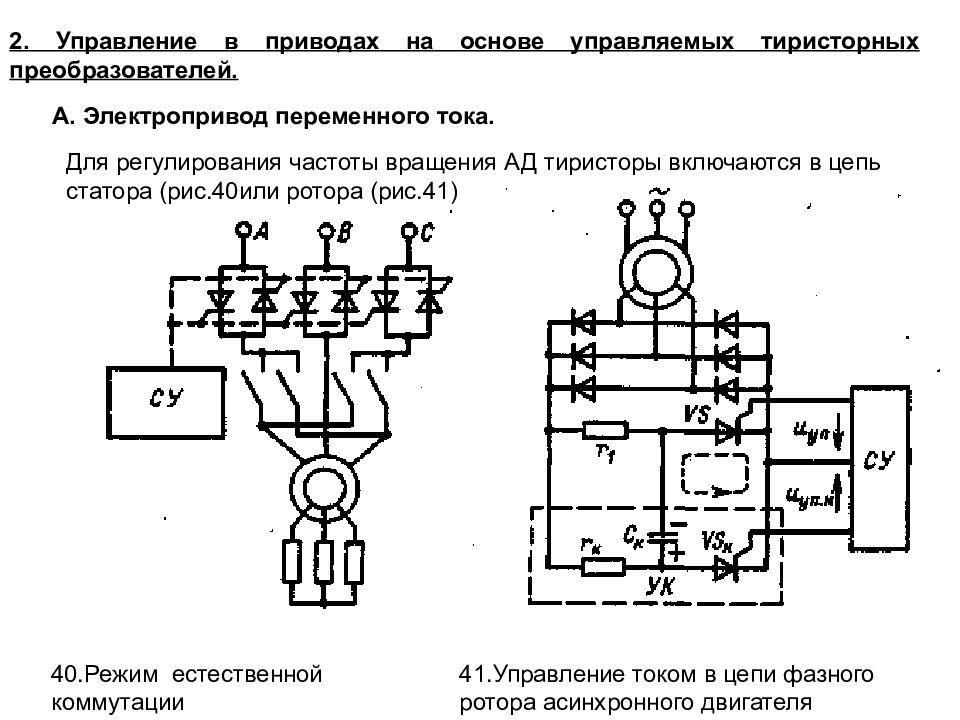
Как работает тиристорный электропривод постоянного тока. Каковы его основные компоненты и характеристики. Где применяются тиристорные электроприводы в промышленности.
Принцип работы тиристорного электропривода постоянного тока
Тиристорный электропривод постоянного тока представляет собой систему управления двигателем постоянного тока с использованием тиристорного преобразователя. Основные компоненты такого электропривода включают:
- Силовой тиристорный преобразователь
- Двигатель постоянного тока
- Систему управления
- Датчики обратной связи
Принцип работы заключается в следующем:
- Тиристорный преобразователь выпрямляет переменное напряжение сети и преобразует его в регулируемое постоянное напряжение для питания якорной цепи двигателя.
- Система управления формирует сигналы для управления тиристорами преобразователя, регулируя выходное напряжение.
- Датчики обратной связи (тока, напряжения, скорости) передают информацию в систему управления для обеспечения требуемых характеристик привода.
Таким образом обеспечивается плавное регулирование скорости и момента двигателя постоянного тока.

Основные характеристики тиристорных электроприводов
Тиристорные электроприводы постоянного тока обладают следующими ключевыми характеристиками:
- Диапазон регулирования скорости — до 1:10000 и более
- Точность поддержания скорости — до 0.1%
- КПД — до 95-97%
- Быстродействие — время реверса 0.1-0.5 с
- Перегрузочная способность по току — до 2-2.5 от номинального
Как регулируется скорость двигателя в тиристорном электроприводе постоянного тока. Существует два основных способа:
- Изменение напряжения на якоре двигателя — обеспечивает регулирование скорости вниз от номинальной.
- Ослабление магнитного потока (тока возбуждения) — позволяет увеличивать скорость выше номинальной.
Области применения тиристорных электроприводов
Тиристорные электроприводы постоянного тока нашли широкое применение в различных отраслях промышленности, где требуется точное регулирование скорости и момента:
- Металлургия — прокатные станы, подъемно-транспортные механизмы
- Бумажная промышленность — бумагоделательные машины
- Текстильная промышленность — намоточные и ткацкие станки
- Горнодобывающая отрасль — шахтные подъемные машины, экскаваторы
- Станкостроение — приводы подач металлорежущих станков
Почему тиристорные электроприводы так популярны в промышленности. Основные преимущества:
- Высокая точность и широкий диапазон регулирования скорости
- Хорошие динамические характеристики
- Высокий КПД и энергоэффективность
- Простота обслуживания
- Надежность и долговечность
Структурная схема тиристорного электропривода
Типовая структурная схема тиристорного электропривода постоянного тока включает следующие основные элементы:
- Силовой тиристорный преобразователь
- Двигатель постоянного тока
- Систему импульсно-фазового управления (СИФУ)
- Регулятор скорости
- Регулятор тока
- Датчики обратной связи по скорости и току
Как работает данная система:
- Регулятор скорости формирует сигнал задания на ток якоря
- Регулятор тока управляет СИФУ для обеспечения требуемого тока
- СИФУ формирует управляющие импульсы для тиристоров
- Тиристорный преобразователь регулирует напряжение на двигателе
- Датчики обеспечивают обратную связь для замкнутого управления
Преимущества и недостатки тиристорных электроприводов
Основные преимущества тиристорных электроприводов постоянного тока:
- Плавное и точное регулирование скорости в широком диапазоне
- Высокая перегрузочная способность по моменту
- Хорошие динамические характеристики
- Простота реализации режима рекуперативного торможения
- Высокий КПД электропривода
Недостатки тиристорных электроприводов:
- Искажение формы потребляемого из сети тока
- Относительно высокая стоимость
- Необходимость в квалифицированном обслуживании
- Чувствительность к качеству питающей сети
Перспективы развития тиристорных электроприводов
Несмотря на активное внедрение частотно-регулируемых приводов переменного тока, тиристорные электроприводы постоянного тока продолжают совершенствоваться и развиваться. Основные направления развития:
- Повышение энергоэффективности за счет оптимизации алгоритмов управления
- Улучшение массогабаритных показателей преобразователей
- Внедрение цифровых систем управления на базе DSP и ПЛИС
- Разработка «интеллектуальных» электроприводов с функциями самодиагностики
- Интеграция в современные АСУ ТП и системы «умного» производства
Какие факторы обеспечивают сохранение позиций тиристорных электроприводов на рынке:
- Большой парк установленного оборудования с двигателями постоянного тока
- Высокие динамические характеристики, важные для ряда применений
- Простота технического обслуживания и ремонта
- Накопленный опыт эксплуатации и квалифицированный персонал
Заключение
Тиристорные электроприводы постоянного тока остаются востребованным техническим решением во многих отраслях промышленности благодаря своим уникальным характеристикам. Несмотря на активное развитие частотно-регулируемых приводов переменного тока, тиристорные преобразователи продолжают совершенствоваться и находить новые области применения. Их использование особенно оправдано при модернизации существующего оборудования с двигателями постоянного тока, а также в высокодинамичных системах, требующих точного регулирования скорости и момента.

Тиристорные электроприводы постоянного тока | Эксплуатация крановых тиристорных электроприводов
Страница 6 из 15
ПРИНЦИП РАБОТЫ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Тиристорные преобразователи постоянного тока являются устройством, преобразующим переменное напряжение питающей сети в выпрямленное регулируемое напряжение посредством фазоимпульсного управления тиристорами. Для пояснения принципа работы преобразователя на рис. 9 приведены схема трехфазного нулевого преобразователя, подключенного на якорную систему двигателя постоянного тока М, а на рис. 10 — диаграммы изменения токов и напряжений. Питание преобразователя осуществляется от сети через трансформатор Т с напряжением на вторичных обмотках Щ-Щ или через токоограничивающий дроссель. Регулирование средних значений выпрямленного напряжения осуществляется тиристорными блоками VS1-VS3 путем изменения системой фазоимпульсного управления (СИФУ) угла включения тиристоров а или р в зависимости от режима работы. Тиристор переводится в проводящее состояние при положительном потенциале между анодом и катодом импульса управления на его базу.
Рис. 9. Схема трехфазного нулевого преобразователя постоянного тока
Поскольку, как видно из схемы рис. 9, аноды тиристоров соединены между собой, включаться может только тот тиристор, потенциал катода которого наибольший. Точка перехода потенциала анод-катод тиристоров через нуль определяет момент естественного включения тиристоров, от которого и отсчитывается угол включения. Преобразователь может работать в выпрямительном или в инверторном режиме. В выпрямительном режиме ток /п и напряжение Un на выходе преобразователя совпадают по направлению и двигатель потребляет из сети энергию. В инверторном режиме направления тока и напряжения противоположны и энергия от двигателя, работающего как генератор, передается в сеть. Перевод преобразователя из выпрямительного в инверторный режим осуществляется посредством увеличения угла а сверх л/2. При этом
разность
Рис. 10. Диаграммы выходных напряжений и токов соответственно в выпрямительном и инверторном режимах:
а — диаграмма напряжения выпрямительного режима; б —_ диаграмма выходного тока выпрямительного режима; в — диаграмма выходного напряжения инверторного режима; г — диаграмма тока инверторного режима
Для обеспечения режима инвертирования необходимо, чтобы закрывающийся тиристор успел восстановить свои запирающие свойства в течение времени приложения к нему отрицательного напряжения, т.е. в пределах угла ф (рис. 10, в). В противном случае возможно опрокидывание преобразователя, приводящее к протеканию аварийного тока, так как ЭДС электродвигателя и напряжение питания совпадают по направлению. Угол у на рис. 10, в, г соответствует промежутку времени, в течение которого ток протекает по двум тиристорам: вступающему в работу и выходящему из нее. Этот угол называется углом коммутации.
Таблица 1. Технические данные тиристорных преобразователей типа ТПЕ и АТРК
Тип преобразователя | Номинальное выпрямленное напряжение, В |
Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, мм | Масса пре- | |||
ТПЕ-100/100-460 |
| 100 | 200 | 800x750x1000 | 280 | |||
ТПЕ-200/200-460 |
| 200 | 400 | |||||
ТПЕ-400/400-460 | 460 | 400 | 800 | 800x775x1637 | 580 | |||
ТПЕ-630/630-460 |
| 630 | 1260 | 1000x775x1650 | 660 | |||
Тип преобразователя | Номинальное выпрямленное напряжение, В | Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, | Масса пре- | |||
АТРК-100/230 | 230 | 100 | 200 | 800x750x1700 | 480 | |||
АТРК-100/460 | 460 | 510 | ||||||
АТРК-160/230 | 230 | 160 | 220 | 480 | ||||
АТРК-160/460 | 460 | 510 | ||||||
АТРК-250/230 | 230 | 250 | 500 | 520 | ||||
АТРК-250/460 | 460 | 600 | ||||||
АТРК-500/230 | 230 | 500 | 1000 | 2000x750x1700 | 1000 | |||
АТРК-500/500 | 460 | |||||||
СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЯ
Преобразователь включает в себя два управляемых выпрямителя: для питания якорной цепи двигателя и его обмотки возбуждения.
Выпрямитель якорных цепей выполнен по трехфазной мостовой реверсивной схеме со встречно-параллельным соединением двух выпрямительных мостов UZ1 и UZ2 (рис. 11, а), выпрямитель цепей возбуждения UZ3 построен по однофазной мостовой схеме (рис. 11,6). Охлаждение силовых тиристоров — естественное воздушное.
Мосты UZ1 и UZ2 подключены к сети быстродействующим автоматическим выключателем QF1 через токоограничивающий реактор L.
Номинальное и максимальное выпрямленное напряжение преобразователей составляет соответственно 230 и 440 В, номинальный выпрямленный ток возбуждения 15 А.
Рис. 11. Силовые схемы выпрямителя якорной цепи (а) и цепи возбуждения (б)
Выключатель QF1 защищает силовой выпрямитель от токов короткого замыкания на стороне переменного тока. На выходе выпрямителя защита осуществляется автоматическим выключателем QF2. В зависимости от номинального тока мосты имеют одну, две или три параллельные ветви соответственно на токи 200, 400 и 630 А. Управление тиристорными мостами раздельное от одной системы фазоимпуль- сного управления, при котором сигналы управления подаются только на работающую группу тиристоров. Это позволяет исключить протекание силовых токов в замкнутом контуре, образуемом тиристорными мостами, и в цепях, связывающих мосты, отсутствуют силовые дроссели.
Выпрямитель возбуждения UZ3 подключен к сети через токоограничивающие резисторы R и автоматический выключатель QF3, защищающий от токов короткого замыкания. В силовой цепи установлен также предохранитель F1, осуществляющий защиту от токов перегрузки.
ФУНКЦИОНАЛЬНАЯ СХЕМА ПРЕОБРАЗОВАТЕЛЯ
Функциональная схема представлена на рис. 12 и состоит из системы управления силового выпрямителя А1 и системы управления выпрямителя возбуждения А2. Система А1 включает следующие основные функциональные узлы: VI — задатчик интенсивности; U2 — регулятор скорости, контур регулирования тока, включающий регулятор тока U3 и датчик тока UA1; U4 — датчик напряжения; U5 — логическое переключающее устройство; UA2 — датчик нуля тока; AV-M -система фазоимпульсного управления.
Рис. 12. Функциональная схема преобразователя постоянного тока
Система А2 включает узел управления U6, задатчик интенсивности U7, регулятор тока возбуждения U8 с датчиком тока UA3 и систему фазоимпульсного управления AV. Задатчик интенсивности обеспечивает разгон привода (изменение напряжения на выходе силового выпрямителя) в функции времени при скачкообразном сигнале от командоаппарата SM. Система фазоимпульсного управления AV-M предназначена для генерирования управляющих импульсов и осуществления их фазового сдвига в зависимости от значения входного управляющего сигнала. Управление тиристорными мостами, как уже было сказано, раздельное, а их переключение производится логическим переключающим устройством 1/5. Управляющий сигнал на вход AV-M формируется системой автоматического регулирования, обеспечивающей стабильность и необходимое качество регулирования во всех возможных режимах. Система автоматического регулирования включает в себя контур скорости с регулятором скорости U2 и обратной связью по напряжению от датчика напряжения U4 и контур тока с регулятором тока U3 и обратной связью по току от датчика тока UA1 с ходом от трансформатора тока ТА1. Система управления возбуждением обеспечивает увеличение частоты вращения двигателя при малых нагрузках путем ослабления поля двигателя по сигналу от датчика силового тока UA1 и стабилизацию заданного узлом управления U6 тока возбуждения при колебаниях напряжения сети и изменении сопротивления обмотки возбуждения. Система автоматического регулирования преобразователя возбуждения одноконтурная по току возбуждения с поступлением сигнала обратной связи по току от трансформатора ТА2. Для осуществления питания и синхронизации системы управления выпрямителей якорной цепи и возбуждения служит блок U9, включающий пять источников выпрямленного напряжения: 12 В — для питания интегральных микросхем; 157 В — стабилизированный источник цепей управления; 150 В — для заряда емкостей в схеме фазового сдвига и источник 7,5 В для цепей смещения логического переключающего устройства. Поскольку работа основных узлов систем управления выпрямителями якорной цепи и цепи возбуждения во многом идентична, ниже рассматривается работа отдельных узлов системы управления силовым выпрямителем. При этом схемы приводятся в упрощенном виде, без учета корректирующих и помехозащитных устройств, подробно рассматриваемых в специальной литературе, а порядковые номера и обозначения элементов не соответствуют их обозначениям в схеме преобразователей.
ЗАДАТЧИК ИНТЕНСИВНОСТИ (ЗИ)
Схема задатчика интенсивности приведена на рис. 13. Она содержит два дифференциальных усилителя А1 и А2, первый из которых является усилителем входного сигнала
Рис. 13. Схема задатчика интенсивности
(резистор R3 в цепи отрицательной обратной связи), а второй — интегратором (конденсатор С1). Сигнал задания подается на инвертирующий вход усилителя А1 через резистор R2, а на неинвертирующий поступает сигнал отрицательной обратной связи через резистор R4. Время изменения выходного напряжения определяется значением входного сигнала и регулируется потенциометрами R7 и R8. Резистор R1 обеспечивает связь между входом ЗИ и узлом управления, резисторы R5 и R6 связывают усилители А1 и А2, а резистор R9 устанавливает необходимый уровень напряжения на инвертируемом входе интегратора А2. Полное время развертки входного сигнала (время интегрирования) может быть установлено от 1 до 14 с.
Тиристорный электропривод постоянного тока / Литература по электроприводам / Stanok-online.ru
Книга название: Тиристорный электропривод постоянного тока
Издание: Москва, \»Энергия\»
Автор: Я.Ю. Солодухо, Р.Э. Белявский, С.Н. Плеханов, В.Я. Самойленко, А.X. Шоруков
Год печати: 1971
Кол-во страниц: 106
Формат: Djvu
Регулируемый привод в промышленности осуществляется в настоящее время преимущественно с помощью двигателя постоянного тока. Наилучшими технико-экономическими показателями обладает тиристорный электропривод. Первые в Советском Союзе тиристорные электроприводы для металлообрабатывающей промышленности были разработаны в Экспериментальном научно-исследовательском институте металлорежущих станков [Л. 1] и Сибирском научно-исследовательском электротехническом институте [Л. 2], а для металлургической промышленности — в институте Тяжпромэлектропроект [Л. 3-8]. Институт Тяжпромэлектропроект приступил к созданию тиристорных преобразователей в 1961 г., в 1963 г. был введен в эксплуатацию тиристорный возбудитель двигателя мощностью 3100 л. с. стана 450, в 1965 г. — нереверсивный привод моталки стана 250, в 1966 г. нереверсивный привод большой мощности прокатной клети непрерывного стана 280 и реверсивный привод с раздельным управлением вентильными группами для рабочего рольганга стана 450.
Опыт разработки, исследования и эксплуатации этих электроприводов нашел отражение в предлагаемой книге и позволил сформулировать требования к сериям тиристорных преобразователей, которые осваиваются электротехнической промышленностью. В гл. 1 книги рассмотрены особенности работы тиристорных электроприводов, не нашедшие должного освещения в литературе, а также систематизированы некоторые известные положения с целью облегчения их практического использования. В гл. 2 даны примеры тиристорных электроприводов, разработанных в институте Тяжпромэлектропроект и внедренных в промышленность.
Скачать бесплатно книгу Тиристорный электропривод постоянного тока
Тиристорный электропривод — Большая Энциклопедия Нефти и Газа, статья, страница 4
Тиристорный электропривод
Cтраница 4
Для большей части механизмов с тиристорным электроприводом Тэ ( 2 — j — 5) стт, поэтому на практике чаще контур тока настраивают на МО. [46]
В настоящее время наблюдается тенденция распространения тиристорного электропривода как постоянного, так и переменного тока. [48]
На рис. 20.8 приведена структурная схема тиристорного электропривода центрифуги. Тиристорный преобразователь, нереверсивный, выполнен по трехфазной мостовой полностью управляемой схеме. [49]
На рис. 12.9 приведена структурная схема тиристорного электропривода экскаватора ЭКГ-46 по системе ТП-Д. На экскаваторе ЭКГ-46 вместо пятимашинного преобразовательного агрегата ( Г — Д) установлен тиристорный преобразователь. [50]
На рис. 9.2 показана блок-схема входного устройства тиристорного электропривода с экстремальным регулятором. Цепь задания комплектного реверсивного тиристорного электропривода серии ЭТЗР подключена к выходу экстремального регулятора ЭР. [51]
Рассмотрим расчет характеристик асинхронных двигателей в системах тиристорного электропривода, нашедших практическое применение для крановых механизмов. [53]
Все регулируемые электроприводы производственных установок завода укомплектованы тиристорными электроприводами и системами автоматического управления. Мощность преобразователей в системах электропривода постоянного тока составляет 0 1 — 100 кВт и 20 — 2000 юВ — А в источниках питания устройств гальваники, электрофореза и других установок. [54]
Наибольшее распространение в СССР и за рубежом получают многодвигательные тиристорные электроприводы с последовательной коррекцией и подчиненным регулированием переменных. На рис. 31 показаны унифицированные структуры электроприводов секций и периферических накатов. Возможность накопления информации и удобство подключения к ЦВМ позволяют использовать цифровые регуляторы и для контроля различного рода технологических величин. Основной структурой секционных электроприводов остается ти-ристорная автоматическая система регулирования ( АСР) скорости с подчиненным контуром тока. Появляются системы, в которых используется и дополнительная коррекция АСР скорости по натяжению вырабатываемого полотна. Контур натяжения позволяет существенно уменьшить статическую ошибку по натяжению, однако на динамической ошибке его наличие практически не сказывается. Поэтому в дальнейшем исследование динамики и оптимизация секционных электроприводов выполнялись применительно к основному, ныне существующему варианту — двухконтурной АСР скорости с подчиненным контуром тока. [55]
Электротехническая промышленность за короткое время освоила и выпускает серийно тиристорные электроприводы для многих отраслей нашей промышленности. Для примера в табл. 9.2 приведены серии регулируемых тиристорных электроприводов для металлорежущих станков. [56]
В качестве главного электропривода на сферошлифовальном станке использован тиристорный электропривод переменного тока с преобразователем частоты и напряжения, позволяющий регулировать скорость двигателя с постоянством мощности. Для электропривода подачи применяют тиристорный электропривод постоянного тока с двигателем и преобразователем напряжения, обеспечивающий диапазон регулирования при постоянстве момента на валу. [57]
Установка буровая БУ 3200 / 200 ЭУК-ЗМА с тиристорным электроприводом, оснащенная комплексом механизмов АСП и устройствами обогрева, предназначена для кустового бурения скважин в условиях умеренного климата. [58]
На рис. 4.6 приведена функциональная схема системы управления тиристорным электроприводом буровой лебедки с реверсом поля двигателя. Силовая часть электропривода с реверсом поля двигателя строится на основе нереверсивного ТП, унифицированного с силовыми преобразователями для других главных электроприводов, и реверсивного тиристорного возбудителя. Последний может выполняться как с раздельным, так и с совместным управлением группами вентилей. С учетом специфики работы электропривода с реверсом поля двигателя в систему управления дополнительно введены следующие компоненты. [60]
Страницы: 1 2 3 4 5
Тиристорный электропривод постоянного тока серии БОТ-1, БОТ-2
Описание:
Преобразователи однофазные тиристорные БОТ выпускаются взамен электроприводов ЭПУ2, БТО и предназначены для построения реверсивных и нереверсивных электроприводов постоянного тока для различных производственных механизмов: механизмов металлорежущих станков, промышленных манипуляторов, в текстильном, полиграфическом оборудовании и в других механизмах.
Преобразователи БОТ имеют следующие функциональные исполнения:
- с обратной связью по частоте вращения электродвигателя (М)
- с обратной связью по ЭДС (Е)
Технические характеристики преобразователей напряжения
|
Тип преобразователя |
Номинальные выходные параметры |
||
|
IH, А |
UH, В |
РH, кВт |
|
|
БОТ — 1 (2) — 301 М, Е |
10 |
115 |
0,37 – 1,0 |
|
БОТ — 1 (2) — 302 М, Е |
10 |
230 |
0,70 – 2,0 |
|
БОТ — 1 (2) — 341 М, Е |
25 |
115 |
1,0 – 2,5 |
|
БОТ — 1 (2) — 342 М, Е |
25 |
230 |
1,5 – 4,0 |
|
Габаритные размеры блока управления, мм |
Ширина 158 / Высота 222 / Глубина 135 |
||
|
Габаритные размеры блока ввода, мм |
Ширина 132 / Высота 265 / Глубина 100 |
||
|
Габаритные размеры сглаживающего реактора, мм |
Ширина 160 / Высота 253 / Глубина 162 |
||
|
Масса блока управления, кг |
3,5 |
||
|
Масса блока ввода, кг |
2,2 |
||
|
Масса сглаживающего реактора, кг |
22,5 |
||
Примечание: Преобразователь управления может обеспечить выходное напряжение до 80 % напряжения питающей сети.
Номинальный режим работы преобразователей – длительный. Допускается работа в кратковременном и повторно-кратковременном режимах работы при выполнении следующих условий:
- максимальная кратность циклической перегрузки по току якоря в течение времени пуска, торможения или реверса двигателя не более 4 в соответствии с характеристиками электродвигателя
- продолжительность включения равна 15 %
- среднеквадратичный ток за время цикла не превышает номинальный.
Преобразователь имеет электронные защиты:
- защита от исчезновения напряжения сети в цепи источника возбуждения и цепи управления
- максимально-токовая защита
- время-токовая (защита от перегрева электродвигателя)
- от превышения максимальной скорости электродвигателя
- от обрыва в цепи тахогенератора
Тиристорный электропривод — Универсальная научно-популярная энциклопедия
Тиристорный электропривод, электропривод, в котором режим работы его аккуратного двигателя (ИД) либо иного аккуратного механизма (ИМ) регулируется преобразовательным устройством (ПУ) на тиристорах (см. Преобразовательная техника).
В Т. э. переменного тока в качестве ИД значительно чаще используют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых возможно регулировать трансформацией амплитуды и частоты напряжения, подводимого к статору, а при синхронного двигателя — кроме этого трансформацией тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ в большинстве случаев помогает тиристорный преобразователь частоты, выполненный или с промежуточным звеном постоянного либо переменного тока, или по схеме с яркой связью.
При питании таких Т. э. от источника постоянного тока в качестве ПУ применяют независимый инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока реализовывают, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока используют двигатели постоянного тока с последовательным, параллельным, смешанным либо свободным возбуждением, регулирование режимов работы которых возможно создавать по цепи обмотки якоря либо обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ помогает тиристорный выпрямитель тока.
В случае если питание таких Т. э. осуществляется от источника постоянного тока, то ПУ делают в виде импульсного регулятора постоянного тока либо совокупности инвертор — выпрямитель с промежуточным звеном переменного тока повышенной частоты. В Т. э. постоянного тока реверсирование ИД создают трансформацией направления тока в обмотке якоря либо обмотке возбуждения двигателя (наряду с этим используют второе такое же ПУ, включаемое встречно-параллельно с первым по отношению к цепи ИД).
Для нагрузки и цепей гальванической развязки питания, и при необходимости согласовать величины ИД источника и напряжения питания в Т. э. применяют трансформатор, включая его на входе ПУ (в случае если Т. э. питается от источника переменного тока) либо в его промежуточном звене (при питании Т. э. постоянным током). Управление передаваемым через ПУ потоком энергии реализовывают при помощи ручной либо регулирования СУР и автоматической системы (управления), включающей блоки питания, напряжения и регулирования частоты, формирования управляющих импульсов для тиристоров силовых цепей ПУ, и блоки защиты от токов замыкания, перегрузок и перенапряжении.
Современные СУР делают на типовых логических блоках (см. Логический элемент) и интегральных схемах, имеющих малые габариты, высокие надёжность и быстродействие. Для отвода тепла от ИД и тиристоров применяют естественное либо принудительное воздушное или жидкостное охлаждение.
Т. э. применяются в разных отраслях индустрии и на транспорте. Мощность Т. э. образовывает (в зависимости от их назначения) от нескольких квт до 10 Мвт и выше.
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Неспециализированный курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
Читать также:
Введение в автоматизированный электропривод
Связанные статьи:
-
Электропривод
Электропривод, электрический привод, совокупность устройств для преобразования электроэнергии в механическую и регулирования потока преобразованной…
-
Следящий электропривод
Следящий электропривод, следящая совокупность, снабжающая воспроизведение некоторых механических перемещений на управляемом объекте при помощи…
- У Н-П энциклопедия
Тиристорные преобразователи для электропривода постоянного тока
Российским производителем тиристорных преобразователей для двигателей постоянного тока является компания «Звезда Электроника». Фирма по техзаданию Заказчика разрабатывает и производит изделия, обеспечивающих выполнений задач управления ДПТ
Во многих отраслях промышленности есть необходимость применения электродвигателей постоянного тока (далее – ДПТ), а значит есть и необходимость плавного пуска, регулирования частоты вращения, реверса и плавного останова.
Устройство, реализующее данные функции, — тиристорный преобразователь может иметь различную структуру в зависимости от возлагаемых на него функций и типа применяемого электродвигателя. Рассмотрим несколько вариантов.
1. Нереверсивный электропривод ДПТ с независимым возбуждением:
Здесь в состав тиристорного преобразователя входя два управляемых выпрямителя: один для регулирования напряжения питания якоря, второй – для регулирования тока возбуждения, благодаря чему становится возможным двухзонное регулирование скорости двигателя.
2. Реверсивный электропривод ДПТ с независимым возбуждением:
При нечастом реверсе имеет смысл применить реверсивные пускатели, которые изменяют полярность питающего напряжения для якоря электрической машины, тем самым изменяя направление его вращения. В момент переключения пускателей тиристорный выпрямитель снимает управляющие импульсы с тиристоров, благодаря чему обеспечивается щадящее (безискровое) переключение пускателей. Однако при необходимости частых реверсов более надежным решением является применение двух групп выпрямителей для питания якоря – так называемый реверсивный выпрямитель. В нем смена полярности напряжения якоря осуществляется бесконтактным способом – то есть с помощью тиристоров. Разумеется, такая структура ведет к удорожанию преобразователя, но другого выхода иногда просто нет.
3. Реверсивный привод ДПТ последовательного возбуждения:
В нем реверс электродвигателя осуществляется за счет изменения полярности одной из обмоток, например, возбуждения.
Российским производителем тиристорных преобразователей (тиристорных регуляторов скорости) для двигателей постоянного тока является компания «Звезда Электроника». Фирма по техзаданию Заказчика разрабатывает и производит изделия, обеспечивающих выполнений задач управления ДПТ. Все преобразователи фирмы помимо выполнения основных функций имеют:
- жидкокристаллический дисплей с индикацией параметров (напряжение и ток цепей якоря и возбуждения, аварийные сообщения, программируемые параметры)
- кнопочную панель управления для программирования устройства
- электронные защиты – от перегрузки, короткого замыкания, потери фазы, перегрева радиатора охлаждения и т.д.
Тиристорный электропривод — ООО «Компания Докер»
ООО «Компания Докер» предлагает профессиональную замену и установку такого устройства, как тиристорный электропривод постоянного тока. Данный механизм монтируется на грузоподъемных кранах и используется как панель управления электродвигателем.
Устройство может устанавливаться взамен существующей контакторной панели, которая временно находится в ремонте. Тиристорный электропривод в конструкции имеет следующие компоненты:
- тиристорные контакторы;
- промежуточные реле;
- реле времени;
- силовой автомат;
- токовые реле защиты двигателей.
В тиристорном электроприводе применяются асинхронные и синхронные 3-х фазные исполнительные двигатели. Тиристорный электропривод постоянного тока позволяет регулировать амплитуду и частоту напряжения, которое подается электродвигателю.
Такая система применяется для электроприводов с мощностью до 300 кВт, обладает высокими регулировочными свойствами и не требует применения тахогенераторов для контроля скорости.Для отвода тепла от тиристоров и исполнительного двигателя используется охлаждение воздушного или жидкостного типа естественным или принудительным путем.
Преимущества и недостатки системы
Благодаря контакторной схеме управления тиристорный электропривод обладает рядом преимуществ:
- снижается риск выгорания контактов;
- уменьшается время простоя крана;
- снижаются затраты на ремонт, обслуживание и профилактику крана.
Основными недостатками такой системы является сложность устройства тиристорных контакторов. К тому же тиристорный электропривод требует высоких капитальных и эксплуатационных расходов.
В большинстве случаев на одной тиристорной панели располагается устройство для управления 4-мя двигателями. Следует помнить, что тиристорный электропривод постоянного тока может изготавливаться индивидуально под конкретную модель грузоподъемного крана.
Для этого важно учитывать заводской алгоритм контроля, при котором возможны различные режимы торможения (подсинхроненное, противотоковое, динамическое). Дополнительно берутся во внимание габариты установленных шкафов на кране и система расположения силовых и слаботочных проводов.
Устройство тиристорного электропривода не вызывает трудностей при монтаже его на кран и не требует замены никаких компонентов (роторных резисторов, кабелей).
Тиристорное управление электродвигателями
В этой статье мы обсудим следующее: — 1. Введение в тиристорное управление электродвигателями 2. Тиристорное управление двигателями серии постоянного тока 3. Тиристорное управление трехфазными асинхронными двигателями 4. Тиристорное управление трехфазным синхронным двигателем 5. Специальное Особенности 6. Преимущества и недостатки.
Введение в тиристорное управление электродвигателями :
Электродвигатели используются в очень большом диапазоне мощностей, от нескольких ватт до тысяч киловатт.Многие приложения требуют очень точной регулировки положения (как в робототехнике). Во многих приложениях главное внимание уделяется оптимальной производительности и эффективности. Системы частотно-регулируемого привода (VSD) помогают оптимизировать процесс, чтобы снизить инвестиционные затраты, эксплуатационные расходы и затраты на техническое обслуживание. Энергосбережение — еще одно большое преимущество приводов с регулируемой скоростью.
Появление тиристоров, способных работать с большими токами, произвело революцию в области управления электроэнергией. Тиратроны, игнитроны, ртутно-дуговые выпрямители, мотор-генераторы с магнитными усилителями были заменены твердотельными схемами с полупроводниковыми диодами и тиристорами.Приводы с тиристорным управлением, в которых используются двигатели постоянного и переменного тока, находят широкое применение в промышленности в качестве приводов с регулируемой скоростью.
В 1960-х годах мощность переменного тока использовалась для преобразования в мощность постоянного тока для прямого управления приводными двигателями с помощью твердотельных устройств (мощные кремниевые диоды и кремниевые выпрямители). Первоначально насыщаемые реакторы использовались вместе с кремниевыми выпрямителями высокой мощности для приводов постоянного тока. В настоящее время тиристоры широко используются для преобразования переменного тока в постоянный.
Общая конфигурация моторного привода:
Рисунок 3.2 показана блок-схема, иллюстрирующая управление моторным приводом. Основными составляющими являются силовой электронный преобразователь, двигатель, процессы, управляющий компьютер и контроллер.
Требуемые характеристики моторного привода определяются технологическим процессом. Для этого процесса может потребоваться привод с регулируемой скоростью или сервопривод и т. Д. Двигатель выбирается на основе этих требований. Силовой электронный преобразователь преобразует однофазный или трехфазный входной ток в источник питания, обеспечивающий требуемые характеристики двигателя.Компьютер управления процессом получает обратную связь от процесса в отношении степени выполнения требований. Эта обратная связь может относиться к скорости, положению и т. Д.
Компьютер подает сигнал об ошибке на контроллер, который, в свою очередь, выполняет корректирующие действия. Корректирующим действием может быть, например, изменение угла включения тиристоров силового электронного преобразователя. В некоторых ситуациях первостепенное значение имеют точность и время отклика двигателя для настройки новой скорости.В некоторых других ситуациях требования могут быть не столь критичными.
Тиристорное управление двигателями постоянного тока :
1. Полностью управляемый выпрямитель :
На рис. 3.32 (a) показана принципиальная схема двигателя постоянного тока, питаемого от однофазной сети переменного тока через полностью управляемый выпрямитель. Якорь двигателя и обмотки возбуждения имеют как сопротивление, так и индуктивность. Поскольку выходной ток выпрямителя не является идеальным постоянным током, роль индуктивности также играет роль.R — сопротивление якоря, включая сопротивление поля, а L — индуктивность якоря, включая индуктивность поля. Во время положительного полупериода тиристоры TH 1 и TH 2 смещены в прямом направлении и начинают проводить ток при ωt = α. Ток нагрузки протекает через TH 1 , двигатель и TH 2 . При ωt = π напряжения питания меняются на противоположные.
Из-за индуктивности L тиристоры TH 1 и TH 2 продолжают проводить ток за пределами ωt = π.От ωt = π + α до ωt = 2π тиристоры TH 3 и TH 4 смещены в прямом направлении. Когда TH 3 и TH 4 запускаются при ωt = π + α, тиристоры TH 1 и TH 2 подвергаются обратному смещению и выключаются путем естественной коммутации. Ток нагрузки передается с TH 1 и TH 2 на TH 3 и TH 4 . Этот режим работы продолжается до тех пор, пока TH 1 и TH 2 не будут запущены в следующем положительном полупериоде.
Рабочие квадранты и формы волн показаны на рис. 3.32 (б) и 3.32 (в). Если индуктивность L достаточно велика, ток двигателя более или менее постоянен. Значение α должно быть таким, чтобы при срабатывании тиристоров мгновенное значение входного переменного напряжения V max sin ωt было больше, чем противоэдс E b . Это устанавливает нижний предел угла открытия α.
Среднее выходное напряжение преобразователя,
Для постоянного тока двигателя I a , мы можем написать —
Поскольку ток возбуждения также равен I a , обратная ЭДС E b может быть записана как K 1 I a N, где K 1 — постоянная величина.Записывая E b как K 1 I a N, мы пренебрегли остаточным магнетизмом в двигателе.
Подставляя значение I на из уравнения. (3.54) в уравнении. (3.55) имеем —
Используя приведенную выше формулу. (3.56) характеристики скорость-крутящий момент для различных значений a могут быть построены, как показано на рис. 3.32 (d).
2. Полууправляемый выпрямитель :
Двигатель постоянного тока, питаемый от однофазной сети переменного тока через полууправляемый выпрямитель, показан на рис.3.33 (а). Выпрямитель имеет два тиристора TH 1 и TH 2 и два диода D 1 и D 2 . Облегченный диод D FW помогает проводить ток, когда тиристор не проводит. R — сопротивление якоря и возбуждения, L — индуктивность обмоток якоря и возбуждения.
Во время положительного полупериода тиристор TH 1 срабатывает при ωt = α и начинает проводить. Значение α должно быть таким, чтобы V max sin α> E b .Ток протекает через TH 1 , двигатель и диод D 1 от ωt = α до ωt = π. При ωt = π входное напряжение становится отрицательным, и диод свободного хода D FW смещен в прямом направлении. Таким образом, при ωt = π тиристор TH 1 и диод D 1 перестают проводить ток, и ток передается на D FW .
Во время отрицательного полупериода тиристор TH 2 смещен в прямом направлении, и когда он срабатывает при ωt = π + α, диод свободного хода D FW перестает проводить, и ток передается на комбинацию TH 2 — D 2 .TH 2 и D 2 проводят от ωt = π + α до ωt = 2π. При ωt = 2π тиристор TH 2 и диод D 2 отключаются, и ток через D FW набегает от ωt = 2π до ωt = 2π + α. При ωt = 2π + α тиристор TH 1 снова запускается и начинается следующий цикл работы. Таким образом, работа схемы: D FW , работает для 0 ≤ ωt ≤ α; TH 1 и D 1 проводят для α ≤ ωt ≤ π; D FW проводит для π ≤ ω t ≤ π + α; и TH 2 и D 2 проводят для π + α ≤ ωt ≤ 2π.
Квадрант работы и формы волны показаны на рис. 3.33 (b) и 3.33 (c) соответственно.
Среднее выходное напряжение полупреобразователя —
.
Обратную ЭДС E b можно записать как K 1 I a N без учета остаточного магнетизма —
Подставив значение I на из уравнения. (3.57) в приведенном выше уравнении, мы имеем —
Используя приведенную выше формулу.(3.58) характеристики скорость-момент для различных значений α нанесены на график, как показано на рис. 3.33 (d).
Во время работы двигателей постоянного тока с раздельным возбуждением и двигателей постоянного тока наблюдается, что область прерывистого тока меньше в случае двигателей постоянного тока. Использование полупреобразователя обеспечивает непрерывный ток почти во всем рабочем диапазоне, за исключением случаев, когда крутящий момент нагрузки очень мал. Если в цепи якоря используется индуктивность, можно получить постоянный ток якоря во всем рабочем диапазоне.
Двигатели сериипостоянного тока обычно используются для приложений с постоянной выходной мощностью. Однако характеристики скорость-крутящий момент не соответствуют постоянной выходной мощности для заданного угла открытия и, следовательно, для получения постоянной выходной мощности во всем диапазоне скоростей угол открытия α должен быть отрегулирован. Полупонверторная система, благодаря своему свободному вращению, помогает поддерживать постоянный ток и, таким образом, обеспечивает лучшую производительность двигателей по сравнению с системой с полным преобразователем.Также было замечено, что двигатель постоянного тока с полупроводниковым преобразователем обеспечивает лучшую производительность.
Преобразователис фазовым управлением имеют низкий коэффициент мощности, особенно когда выходное напряжение меньше максимального, т.е. когда угол включения α большой. Полупреобразователи обеспечивают лучший коэффициент мощности по сравнению с полными преобразователями, хотя улучшение незначительно.
Тиристорное управление трехфазными асинхронными двигателями :
Скорость асинхронного двигателя определяется как —
.
Таким образом, скорость асинхронного двигателя с фиксированным числом полюсов зависит от частоты питания f и скольжения s, которые, в свою очередь, зависят от напряжения или тока, подаваемого на двигатель.
Для регулирования скорости трехфазных асинхронных двигателей с использованием тиристоров доступны следующие методы:
1. Регулировка напряжения статора или регулировка постоянной частоты переменного напряжения.
2. Регулирование переменного напряжения и частоты.
3. Контроль сопротивления ротора.
4. Контроль вторичного постороннего напряжения.
Изменение напряжения статора осуществляется с помощью регуляторов переменного тока, которые управляют среднеквадратичным значением переменного напряжения, подаваемого на двигатель, путем включения тиристоров в каждую линию питания.Мощность переменной частоты получается с помощью циклоконвертера, который напрямую преобразует постоянную частоту переменного тока в переменную частоту, или с помощью инвертора, который преобразует постоянный ток в переменный ток.
Действующее значение внешнего сопротивления, вводимого в цепь ротора, можно контролировать, подключив высокочастотный прерыватель через сопротивление и изменяя время, в течение которого прерыватель включен во время цикла. Статические преобразователи частоты используются для замены вспомогательных машин в системе Scherbius.Схема Крамера также была изменена за счет использования выпрямителя с диодным мостом вместо преобразователя ротора, но двигатель постоянного тока все еще требуется для преобразования выпрямленной мощности скольжения в механическую энергию.
Тиристорное управление трехфазным синхронным двигателем:
Синхронный двигатель — это двигатель с постоянной скоростью, который развивает крутящий момент только при синхронной скорости, которая прямо пропорциональна частоте питания. Следовательно, изменение частоты источника переменного тока — удобный метод управления скоростью синхронного двигателя.До появления силовых электронных устройств изменение частоты было очень сложной задачей.
Однако силовые электронные схемы обеспечивают простой способ изменения частоты. Переменный ток частотой 50 Гц преобразуется в постоянный с помощью управляемого выпрямителя. Инвертор переменной частоты преобразует постоянный ток в переменный ток переменной частоты. Для поддержания постоянной плотности магнитного потока в двигателе напряжение и частота должны изменяться в одном и том же соотношении, чтобы соотношение напряжение / частота было постоянным.
Рисунок 3.52 показывает систему управления скоростью синхронного двигателя. Трехфазный переменный ток частотой 50 Гц выпрямляется управляемым трехфазным выпрямителем. Фильтр удаляет гармоники с выхода выпрямителя. Преобразователь частоты подает переменный ток переменной частоты в синхронный двигатель. Таким образом, можно управлять скоростью синхронного двигателя. Постоянный ток на выходе фильтра также используется для возбуждения обмотки ротора.
В низкоскоростных приложениях с большой мощностью также можно использовать циклоконвертер для преобразования переменного тока с частотой 50 Гц в переменный ток переменной частоты.Циклоконвертер выполняет преобразование без промежуточного звена постоянного тока. Максимальная выходная частота ограничена примерно одной третью частоты, так что выходная волна имеет низкое содержание гармоник.
Инверторный привод с коммутацией нагрузки для синхронного двигателя:
Для двигателей большого размера (двигатели с выходной мощностью более 750 кВт) привод синхронного двигателя с коммутацией нагрузки становится конкурентоспособным по сравнению с приводом асинхронного двигателя в требованиях регулируемой скорости. Рисунок 3.53 показана схема инверторного привода с коммутацией нагрузки. Трехфазное питание переменного тока выпрямляется с помощью трехфазного мостового преобразователя с фазным управлением. Источник постоянного тока проходит через фильтр для улучшения формы сигнала и затем подается на инвертор с коммутацией нагрузки.
Каждая фаза синхронного двигателя представлена внутренней наведенной ЭДС последовательно с индуктивностью обмотки статора. Частота и фаза токов статора синхронизированы с положением ротора. Коммутация тока в инверторе с коммутацией нагрузки для подачи токов к фазам статора в соответствующей последовательности обеспечивается ЭДС статора.Наличие трехфазной наведенной ЭДС в обмотке статора двигателя вызывает коммутацию тиристора. Регулировка угла зажигания преобразователя контролирует его выходное постоянное напряжение и, следовательно, ток.
Полная схема контроллера инверторного привода с коммутацией нагрузки показана на рис. 3.54. Входное напряжение на статоре синхронного двигателя измеряется для расчета положения поля ротора как функции времени. Измеренное напряжение выпрямляется, чтобы получить сигнал постоянного тока, пропорциональный мгновенной скорости синхронного двигателя.Время выключения T off , доступное тиристору в инверторе, сохраняется постоянным.
Поддерживая постоянным ток возбуждения и T off , фактическая скорость сравнивается с опорной скоростью. Сигнал ошибки усиливается, чтобы получить ссылку l d . Если фактический ток I d меньше задания, выпрямитель увеличивает напряжение, подаваемое на инвертор, тем самым увеличивая I d и крутящий момент двигателя. Основываясь на токе I d и измеренном напряжении, на затворы тиристоров инвертора подаются импульсы зажигания, чтобы поддерживать T на постоянным.
Особенности двигателей с тиристорным приводом:
Наиболее часто используемые двигатели постоянного тока для тиристорных приводов — это двигатели постоянного тока с раздельным возбуждением и двигатели постоянного тока с последовательным возбуждением. Тиристорные приводные двигатели обычно отличаются от обычных двигателей постоянного тока по конструкции. Прежде чем обсуждать особенности тиристорных приводных двигателей, необходимо обсудить влияние тиристорного источника питания на характеристики двигателя постоянного тока.
Влияние тиристорного источника питания на характеристики двигателя постоянного тока :
1.Выходное напряжение тиристорного преобразователя состоит из постоянной составляющей и гармонической составляющей переменного тока.
2. Выходное напряжение может изменяться очень быстро по сравнению с выходным напряжением мотор-генераторной установки из-за отсутствия постоянных времени возбуждения, связанных с генератором.
3. Аномально высокое значение тока якоря может возрасти в случае выхода из строя тиристора при работе в режиме инвертора.
4. Величина гармоник уменьшается с увеличением частоты гармоники для всех преобразователей.Величина гармоник увеличивается по мере увеличения угла зажигания и уменьшения постоянного напряжения для всех двунаправленных преобразователей. Чем выше индуктивность якоря, тем меньше будут токи гармоник.
5. Крутящий момент создается постоянной составляющей тока, тогда как нагрев достигается за счет действующего (или действующего) значения тока. Коэффициент формы (отношение эффективного значения к среднему значению) для полуволновых трехфазных тиристоров можно принять равным 1,2, а для двухполупериодных трехфазных тиристоров он равен 1.1. Это увеличивает электрические потери и, следовательно, нагрев на 5-7 процентов больше для трехфазных полумостовых преобразователей, а для трехфазных полумостовых преобразователей — с 15 до 20 процентов.
6. На коммутационную способность серьезно влияет наличие гармонических токов. Пиковое значение тока увеличивается, межполюсный поток будет уменьшен по величине, и будет введена временная задержка между межполюсным током и потоком из-за вихревых токов, генерируемых на железном пути межполярного потока.
Другим влиянием тиристорного источника питания на работу двигателя является нагрев межполюсной обмотки, насыщение межполюсной магнитной цепи, напряжение трансформатора на щетках и увеличение напряжения в сегменте коммутатора.
Особенности двигателей с тиристорным приводом :
Двигатели постоянного тока с тиристорным приводом разработаны с учетом следующих особенностей для улучшения их характеристик:
1. Тиристорные приводные двигатели постоянного тока изготавливаются с якорем большего диаметра и полюсами большего размера с уменьшенной высотой.
2. Коммутаторы увеличены, чтобы обеспечить дополнительную изоляцию, чтобы выдерживать большие и быстрые колебания напряжения.
3. Ярмо, а также основные и коммутирующие полюса ламинированы, чтобы уменьшить влияние вихревых токов.
4. Якоря с низким моментом инерции используются для улучшения реакции.
5. Компенсирующие обмотки используются в больших двигателях для уменьшения эффекта реакции якоря.
6. Разъемные щетки с хорошим коммутационным качеством используются для уменьшения влияния напряжения трансформатора на коммутируемые катушки.
7. Использование многослойного ярма вместо сплошного ярма в большей степени улучшает коммутацию.
8. Использование большого количества шин коммутатора снижает напряжение между сегментами коммутатора и улучшает коммутацию.
9. Использование восьмиугольной, а не круглой формы для рамы позволяет разместить больше материала и дает больший рейтинг для того же размера рамы.
10. Плотность тока, используемая для якоря и межполюсной обмотки, снижена по сравнению с обычными двигателями постоянного тока того же размера и номинала, чтобы уменьшить влияние нагрева якоря и межполюсных полюсов.
11. Используется изоляция более высокого класса (материалы класса F в качестве стандартной изоляции), чтобы обеспечить более высокий рост температуры и отвод большего количества потерь от данной рамы.
12. Отношение дуги полюса к шагу полюса уменьшено, чтобы уменьшить отношение зоны коммутации к нейтральной зоне.
13. Увеличена индуктивность якоря для уменьшения тока пульсаций. Это также может увеличить реактивное напряжение. Количество витков на катушку якоря поддерживается на минимальном уровне, поскольку реактивное напряжение пропорционально квадрату витков на катушку.Избегают использования фиктивных катушек.
14. Принудительное охлаждение вспомогательным двигателем переменного тока широко используется для улучшения охлаждения двигателя на пониженных скоростях.
15. Особое внимание необходимо уделять точному расположению щеток, полюсов и изготовлению коммутаторов.
Преимущества и недостатки тиристорного управления:
Тиристорный регулятор имеет следующие преимущества и недостатки:
Преимущества:
1.Устройство управления реагирует быстрее, поскольку устраняет запаздывание по времени, вызванное индуктивностями поля генератора и якоря.
2. Благодаря низкому падению напряжения на тиристоре эффективность системы управления высока.
3. Устройство управления меньше по размеру, легче по весу, дешевле по цене, требует меньше места и требует минимального обслуживания.
4. Простая и надежная работа.
Недостатки:
1.Из-за более высокой пульсации на выходе преобразователя возникают серьезные проблемы с нагревом двигателя и коммутацией.
2. Из-за переключающего действия тиристоров и несинусоидальности тока повышается вероятность помех в сетях связи.
Во всех системах привода с регулируемой скоростью силовой электронный преобразователь действует как интерфейс, который принимает электроэнергию от существующего источника и преобразует ее управляемым образом в подходящую форму, совместимую с конкретной нагрузкой или процессом, для которого она используется.Основными источниками электроэнергии являются: одно- или трехфазный переменный ток 50 Гц от инженерных сетей и постоянный ток от аккумуляторных батарей или солнечных элементов. Требуются четыре основных формы преобразования энергии: переменный ток в постоянный, постоянный в постоянный, постоянный в переменный и переменный в переменный.
Современные преобразователи компактны, дешевы, надежны, долговечны, универсальны и полностью управляемы. Они также нуждаются в меньшем техническом обслуживании. Они подходят для всех четырех основных форм преобразования энергии, упомянутых выше, через выпрямители (переменный / постоянный), прерыватели (постоянный / постоянный), инверторы (постоянный / переменный) и циклоконверторы или регуляторы переменного тока (переменный / переменный ток).
Для управления двигателем постоянного тока управляемая мощность постоянного тока от источника постоянного напряжения переменного тока получается с помощью управляемых выпрямителей (обычно называемых преобразователями), использующих тиристоры и диоды. Управление постоянным напряжением достигается путем изменения фазового угла, при котором тиристоры срабатывают, относительно формы волны приложенного переменного напряжения. Эта схема управления известна как фазовый контроль.
В другой системе управления, известной как интегральное управление циклом, ток пропускается от источника переменного тока в течение нескольких полных циклов, а затем гасится еще на несколько циклов, причем процесс повторяется непрерывно.Управление осуществляется путем регулировки соотношения продолжительности включения и выключения. Этот метод подходит для управления двигателями постоянного тока с малой выходной мощностью кВт.
Преобразователис фазовым управлением просты в эксплуатации и менее дороги, поскольку не требуют дополнительных схем для процесса коммутации. В таких преобразователях достигается естественная коммутация, т. Е. При включении входящего тиристора он немедленно смещает выходной тиристор в обратном направлении и выключает его.
Методы управления фазой и интегральным циклом также применимы для двигателей переменного тока, в которых не требуется схема преобразователя.
Управление двигателями постоянного тока, питающимися от источника постоянного тока, осуществляется с помощью схемы переключения тиристоров, называемой прерывателем. В цепях прерывателя управление средним напряжением достигается путем изменения отношения продолжительности включения и выключения, в течение которого на двигатель подается напряжение питания постоянного тока. Это обеспечивает эффективное и бесступенчатое управление двигателями постоянного тока.
Двигатель может также работать в режиме рекуперативного торможения. Вместо схем преобразователя можно использовать неуправляемый выпрямитель, который обеспечивает постоянное постоянное напряжение, за которым следует прерыватель для обеспечения переменного среднего прямого выходного напряжения.Контроллер прерывателя требует принудительной коммутации тиристора.
Для управления двигателями переменного тока, питающимися от источника постоянного тока, используются инверторы на базе тиристоров, транзисторов или полевых МОП-транзисторов. Такие коммутационные схемы передают энергию от источника постоянного тока к нагрузке переменного тока переменной частоты и / или переменного напряжения. Из-за операции переключения формы сигналов переменного напряжения ступенчатые, гармонические составляющие которых отфильтровываются. Поскольку источником питания обычно является переменный ток, полная схема получения мощности переменного напряжения и частоты включает использование как инвертора, так и преобразователя.
Циклоконвертер — это блок управления для обеспечения питания переменного напряжения и частоты непосредственно от источника фиксированной частоты без необходимости использования промежуточного каскада постоянного тока. Механизм управления напряжением и частотой представляет собой комбинацию механизмов, используемых в преобразователе с фазовым управлением и преобразователях с импульсной модуляцией.
Циклоконвертеры, несмотря на привлекательность прямого преобразования переменного тока в переменный, страдают определенными недостатками, из-за которых они не стали популярными.Некоторые из этих недостатков: циклоконвертеры могут генерировать только субчастотный выходной сигнал; они производят выход с большим содержанием гармоник и имеют низкий коэффициент входной мощности. Циклоконверторы используются для тихоходных приводов и для управления линейными двигателями в высокоскоростных транспортных системах.
SCR Drive Controllers (SCR-Silicon Controlled Rectifier)
Пользовательские пакеты Joliet Technologies объединяют и разрабатывают контроллеры SCR Drive (Silicon Controlled Rectifier Drive Controller) и преобразователи частоты постоянного тока (VSD) с использованием ведущих производителей, таких как ABB , Emerson (Control Techniques & Saftronics / Fincor), Siemens и WEG и многие другие.Наши индивидуальные комплекты приводов созданы в соответствии с вашими спецификациями для вашего приложения. Мы специализируемся на системах привода большой мощности (500 л.с. и выше). Контроллеры привода SCR также известны как приводы постоянного тока, приводы с регулируемой скоростью, приводы с регулируемой скоростью, приводы электродвигателей, приводы с электронными двигателями и некоторые другие названия.
Позвоните нам по телефону (815) 725-9696 или по факсу (815) 725-9393 или , напишите нам по электронной почте или заполните RFQ с вашими требованиями. Обслуживание большей части Чикаго и всего мира.
Joliet Technologies входит в список закрытых промышленных панелей управления UL (Underwriters Laboratories).
Что такое привод SCR (привод с регулируемой скоростью, VSD или VFD)?
Мир электронных моторных приводов можно разделить на две категории: переменного и постоянного тока. Приводы SCR (привод выпрямителя с кремниевым управлением) почти всегда работают от постоянного тока. Моторный привод управляет скоростью, крутящим моментом, направлением и результирующей мощностью двигателя. Привод постоянного тока обычно управляет двигателем постоянного тока с шунтирующей обмоткой, который имеет отдельные цепи якоря и возбуждения.Приводы переменного тока управляют асинхронными двигателями переменного тока и, как и их аналоги постоянного тока, регулируют скорость, крутящий момент и мощность.
Joliet Technologies SCR Drives…
У нас есть опыт и мы знаем, как предоставить вам лучший привод для вашего приложения. Joliet Technologies может оценить имеющееся у вас оборудование и порекомендовать его модернизацию или замену системы. Не стесняйтесь обращаться к нам с любыми вопросами, связанными с приводом.
Как обслуживать привод SCR (привод с регулируемой скоростью)
Знаете ли вы, как обслуживать приводы с регулируемой частотой (VFD)? Сделать это проще, чем вы думаете.Включив несколько простых и логичных шагов в вашу программу профилактического обслуживания, вы можете гарантировать, что ваши приводы будут безотказно служить в течение многих лет.
Чтобы приобрести привод, свяжитесь с нами по телефону: (866) 492-9888 ,
Телефон (815) 725-9696 , факс (815) 725-9393 или электронная почта info @ joliettech .com
Контроллеры привода SCR
Приводы SCR
Reliance 86475-1R Electric Drive Thyristor Stack Plc Control Rectifier B463294
Выпрямитель B463294 управления стеком тиристора электрического привода Reliance 86475-1R PlcРекомендуемые продукты для Все категории
Рекомендуемые продукты для Все категории
Создайте бесплатную учетную запись для получения льготных цен, расширенных гарантий и многого другого! Узнать больше
Создайте бесплатную учетную запись для новых преимуществ! Узнать больше
- Дом
- Опись
- Электрооборудование
- Элементы управления
- НАДЕЖНОСТЬ 86475-1R
Идентификатор продукта: $ {getProductId ()}
MFG #: $ {product.модель}
Идентификатор продукта: $ {getProductId ()}
MFG #: $ {product.model}
$ {_applyMoneyFormat (getPrice () / 100, ‘USD’, ‘symbol’)}
$ {_applyMoneyFormat (getOutOfStockPrice () / 100, ‘USD’, ‘symbol’)}
Бесплатная доставка в тот же день
Бесплатный возврат
Нужно $ {shippingArrivalDayOfWeek}, $ {shippingArrivalDate.формат (‘МММ. ДД’)}? Закажите его в следующем $ {shippingCountDown} и выберите «Авиадоставка на следующий день» при оформлении заказа.
Количество
В наличии
Осталось только $ {getQuantityAvailable ()}
$ {getCartItem ()? «Обновить корзину»: «Купить сейчас»} Сделать предложение РАСПРОДАНО
$ {вариант.name}
$ {getOptionValue (опция)}
$ {_applyMoneyFormat (getPrice () / 100, ‘USD’, ‘symbol’)}
$ {_applyMoneyFormat (getOutOfStockPrice () / 100, ‘USD’, ‘symbol’)}
БЕСПЛАТНАЯ ДОСТАВКА В ЖЕ ДЕНЬ
БЕСПЛАТНЫЙ ВОЗВРАТ
Количество
В наличии
Осталось только $ {getQuantityAvailable ()}
$ {qty} 0
Купить сейчас
Сделать предложение
РАСПРОДАНО
$ {вариант.name}
$ {option.value == null? «Н / Д»: option.value}
Подробнее о продукте
$ {getSpecToDisplayByCategoryAttributeId (attribute.id)}
$ {_getVar (комбинация, ‘custom_description’)}
$ {_getVar (комбинация, ‘additional_notes’)}
Сведения о доставке
$ {getWarehouses ().map (s => s.address + ‘,’ + s.city + ‘,’ + s.state) .join (‘/’)}
$ {комбинация.вес} фунтов
$ {комбинация.length} x $ {комбинация.ширина} x $ {комбинация.высота}
Возможно вам понравится
Сначала вам нужно войти в свою учетную запись
Нет учетной записи? Вы всегда можете создать его за несколько секунд.Это бесплатно!
Авторские права © 2021 NRI Industrial Sales Inc.
6401 Роджерс Роуд, Дельта, Огайо 43515
4901 Rockaway Blvd NE, Rio Rancho, NM 87124
9-2530 Speers Road, Oakville, ON L6L 5K8
1-888-995-9813
Понедельник — пятница с 8:00 до 17:00 EST
Информационный бюллетень
Ищете еще больше экономии? Подпишитесь на нашу ежемесячную рассылку по кодам купонов!
Следуйте за нами в социальных сетях
https: // www.nriparts.com/assets/js/zendeskChat.js?77876e7190ae51e118fa646bd6fe87a4d31115a5
Все, что вам нужно знать о SCR
LGC400-10 — это система управления двигателем постоянного тока на базе SCR
Во-первых, что такое диод?
Диод — это электрический компонент, который позволяет электричеству течь в одном направлении, но не в другом. Он похож на обратный клапан, который пропускает воду, но не входит обратно. Это также похоже на заслонку на выпускном отверстии.Если воздух движется в правильном направлении, сила воздуха открывает вентиляционное отверстие и позволяет дыму выйти. Как только воздух перестает дуть, сила тяжести закрывает заслонку, чтобы предотвратить попадание наружного воздуха, мусора, дыма или животных.
На иллюстрации ниже, когда входящая волна переменного тока является положительной, ток течет слева направо, поэтому диод позволяет току проходить. Когда волна переменного тока отрицательная, ток должен течь справа налево, поэтому диод блокирует его.
Диод пропускает ток только в одном направлении
Диодные мосты
Если используется только один диод (как показано выше) с входом переменного тока, выход называется полуволновым переменным током , потому что проходит только положительная половина линии переменного тока.Так как же нам воспользоваться преимуществами линии переменного тока, когда она находится в отрицательной части своей фазы? С диодным мостом . Если вы возьмете 4 диода и расположите их в виде ромба, как показано на рисунке ниже, выход диодного моста всегда будет положительным, независимо от того, положительный или отрицательный вход переменного тока. Этот выход известен как выпрямленного переменного тока .
Иллюстрация диодного моста для преобразования переменного тока в выпрямленный
Выпрямительный мост и тиристоры
В США источники питания переменного тока 115 В и 230 В имеют частоту 60 Гц.Это означает, что за 1 секунду происходит 60 полных волн. Таким образом, для выпрямленного переменного тока на выходе имеется 120 импульсов в секунду. Это настолько быстро, что двигатель постоянного тока работает так, как будто он питается от постоянного тока.
Итак, теперь мы знаем, как получить выпрямленное напряжение переменного тока и что оно может заставить двигатель постоянного тока вращаться, но как мы можем изменить скорость двигателя постоянного тока? Путем изменения напряжения на двигателе с помощью выпрямителей с кремниевым управлением (SCR) . SCR похож на диод, но с дополнительной возможностью включать и выключать его, так что электричество не только течет в одном направлении, но и течет только в этом направлении, когда вы хотите, чтобы поток был.Заменяя два диода на SCR, мы преобразуем диодный мост в выпрямительный мост и можем контролировать среднее значение напряжения на двигателе постоянного тока.
Использование тиристоров вместо двух входящих диодов преобразует диодный мост в выпрямительный мост
Одно заметное различие между выходами диодного моста и выпрямительного моста заключается в том, что выход SCR имеет задержку в начале каждого импульса.Это встроено в элементы управления двигателем SCR, чтобы предотвратить одновременное включение двух SCR. Если бы оба SCR были включены, это привело бы к короткому замыканию в линии переменного тока, которое привело бы к срабатыванию выключателей и / или предохранителей, а также, возможно, повредило бы SCR. Вот почему с линейным источником 115 В переменного тока максимальное напряжение, которое вы можете получить от управления тиристором, составляет 100 В постоянного тока, поэтому щеточные двигатели постоянного тока обычно рассчитаны на 90 В постоянного тока. При питании от сети 230 В переменного тока стандартные щеточные электродвигатели постоянного тока рассчитаны на 180 В постоянного тока.
Переменная скорость
Добавляя задержку перед включением SCR, мы не можем ограничить допустимое напряжение на двигателе. Эта задержка называется фазовым углом. Чем выше фазовый угол, тем раньше включится тиристор и тем дольше будет разрешен выпрямленный выход на двигатель. На рисунке ниже показан выпрямительный мост с небольшим фазовым углом, приложенным к тиристорам, чтобы двигатель постоянного тока работал на более низкой скорости. Регуляторы двигателя SCR для щеточных двигателей постоянного тока обычно имеют 1.37 с диапазоном скорости 60: 1 для регулирования нагрузки 1%. Это означает, что вы можете рассчитывать снизить уровень типичного двигателя 90 В постоянного тока до 1,5 В постоянного тока и поддерживать отклонение в 1% (0,9 В постоянного тока в этом примере). Обычно наименьшая возможная скорость в любой комбинации SCR и двигателя постоянного тока определяется двигателем. Двигатели постоянного тока обычно начинают вращаться до того, как выходная мощность привода становится проблемой.
Иллюстрация использования тиристоров для ограничения количества выходного напряжения на двигателе постоянного тока
| Выход SCR при 20 В постоянного тока (таблица читается слева направо) | Выход SCR при 90 В постоянного тока (таблица читается слева направо) |
Щелкните здесь, чтобы узнать о преимуществах и недостатках управления двигателями постоянного тока SCR.
Щелкните здесь, чтобы увидеть, что American Control Electronics предлагает нерегенеративное управление SCR, или здесь, чтобы увидеть предложения с регенеративным SCR.
Щелкните здесь, чтобы узнать об альтернативе SCR для управления двигателем постоянного тока, PWM.
THYRISTOR DC DRIVES — ОБЩЕЕ, электротехника, электрические приводы, конспекты лекций, pdf
Тиристорные приводы постоянного тока:
Рис. Принципиальная схема аналогового регулируемого привода с контурами управления с обратной связью по току и скорости
- Для двигателей мощностью до нескольких киловатт преобразователь якоря может питаться от однофазной или трехфазной сети, но для более крупных двигателей всегда используется трехфазный.
- Для питания сварного шва двигателя используется отдельный тиристорный или диодный выпрямитель: мощность намного меньше мощности якоря, поэтому питание часто однофазное.
- Расположение, показанное на рисунке, типично для большинства устройств постоянного тока. приводов и обеспечивает регулирование скорости с обратной связью. Функции двух контуров управления будут рассмотрены позже, но для читателей, которые не знакомы с основами обратной связи и систем с обратной связью.
- Основная силовая цепь состоит из шестиристорной мостовой схемы, выпрямляющей входящий переменный ток. Поставка для производства постоянного тока питание якоря двигателя. Сборку тиристоров, установленных на радиаторе, обычно называют «стопкой». Изменяя угол скручивания тиристоров, можно изменять среднее значение выпрямленного напряжения, тем самым позволяя регулировать скорость двигателя.
- Управляемый выпрямитель производит грубую форму d.c. с ярко выраженной пульсацией выходного напряжения. Эта составляющая пульсаций вызывает пульсацию токов и магнитных потоков в двигателе, и во избежание чрезмерных потерь на вихревые токи и проблем с коммутацией полюса и рама должны иметь многослойную конструкцию.
- Двигатели, поставляемые для использования с тиристорными приводами, имеют многослойную конструкцию, но старые двигатели часто имеют сплошные полюса и / или рамы, и они не всегда будут удовлетворительно работать с выпрямительным питанием.Приводные двигатели также обычно поставляются с прикрепленным «нагнетательным» двигателем в стандартной комплектации.
- Это обеспечивает непрерывную сквозную вентиляцию и позволяет двигателю непрерывно работать с полным крутящим моментом даже на самых низких скоростях без перегрева. Цепи управления с низким энергопотреблением используются для контроля основных переменных, представляющих интерес (обычно тока и скорости двигателя), и для генерации соответствующих импульсов Wring, чтобы двигатель поддерживал постоянную скорость, несмотря на изменения нагрузки.
- «Задание скорости» обычно представляет собой аналоговое напряжение, изменяющееся от 0 до 10 В, и полученное с помощью потенциометра ручной установки скорости или где-либо еще на предприятии. Комбинация силовых, управляющих и защитных цепей составляет преобразователь.
- Стандартные модульные преобразователи доступны в виде готовых изделий мощностью от 0,5 кВт до нескольких сотен кВт, в то время как более крупные приводы будут адаптированы к индивидуальным требованиям.Отдельные преобразователи могут быть смонтированы в корпусах с изоляторами, предохранителями и т. Д., Или группы преобразователей могут быть смонтированы вместе, образуя многодвигательный привод.
Тиристорное управление электроприводами Ведам Субрахманьям: Новая мягкая обложка (1988) Первое издание.
Изображение запасаОпубликовано McGraw Hill Education, 1988 г.
Новый Состояние: Новое Мягкое покрытие
Об этом товаре
В книге представлены инструменты для анализа электрических машин, питающихся от тиристорных преобразователей.Подробное описание приводов постоянного и переменного тока дается для того, чтобы сделать правильный выбор привода для требуемой работы, чтобы обеспечить желаемые характеристики. Подробно обсуждаются аспекты преобразователей с фазовым управлением, инверторов, преобразования частоты с использованием этих преобразователей и метод улучшения состояния линии. Дано математическое моделирование двигателей постоянного и переменного тока. Приведены аспекты работы асинхронных и синхронных двигателей с частотно-регулируемым питанием. Также обсуждаются особенности двигателей постоянного тока, работающих на преобразователях, в отношении коммутации, диапазона скоростей и т. Д.Предлагаются методы повышения производительности. Также включено краткое описание микропроцессоров для управления тиристорными приводами переменного и постоянного тока. Принятый подход прост. Особенности преобразователей рассмотрены без каких-либо математических выводов. Матричные уравнения двигателей выводятся с учетом физического поведения двигателя. Выявлены особенности частотно-регулируемого режима с постоянным магнитным потоком. Книга могла бы послужить полезным пособием для студентов бакалавриата по электроприводам.Это также будет ценным справочником для практикующих инженеров, занимающихся статическими преобразователями энергии и приводами. Оглавление 1. Тиристорные преобразователи мощности 2. Математическое моделирование электрических машин 3. Управление асинхронным двигателем 4. Управление синхронным двигателем 5. Управление двигателем постоянного тока 6. Микропроцессоры в управлении электроприводами Страниц: 480. Инвентарный инвентарь продавца № 24431
Библиографические данные
Заголовок: Тиристорное управление электроприводами
Издатель: McGraw Hill Education
Дата публикации: 1988
Переплет: Мягкая обложка
Состояние книги: Новое
Издание: Первое издание.
Об этом заголовке
Сводка:Совершенно новое международное издание на бумажной обложке То же, что и в описании, ** Экономичное издание, возможно, было напечатано в Азии с надписью «Не продается в США». Использование разрешено законом, несмотря на любые оговорки на обложке. Экономить деньги. Свяжитесь с нами по любым вопросам. Лучшая служба поддержки! Все заказы отправляются с номером отслеживания
«Об этом заголовке» может принадлежать другой редакции этого заголовка.
Описание магазина
Посетить витрину продавца
Условия продажи:Все книги новые. Мы принимаем платежи следующими способами:
- Кредитная карта: Visa, MasterCard или American Express.
- Банковский тратт или банковский чек.
- Банковский / банковский перевод.
Чеки могут быть выплачены BookVistas.
Книги отправляются DHL, FedEx, Aramex, зарегистрированной авиапочтой или зарегистрированной SAL (Surface Air
Lifted).
Условия доставки:
Стоимость доставки указана для книг весом 2,2 фунта или 1 кг. Если ваш заказ на книгу тяжелый или негабаритный, мы можем связаться с вами, чтобы сообщить, что требуется дополнительная доставка.
Список книг продавца
Способы оплаты
принимает продавец
Прямой дебет (лично авторизованный платеж) Проверять Наличные PayPal Банковский тратт Банковский перевод
Концептуальное направление развития энергосберегающих тиристорных электроприводов прокатных станов Научно-исследовательская работа «Электротехника, электроника, информационная инженерия»
(I)
CrossMark
Доступно на сайте www.sciencedirect.com
ScienceDirect
Процедура инжиниринга 150 (2016) 3-10
Инженерные процедуры
www.elsevier.com/locate/procedia
Конференция по промышленной инженерии, МКПП 2016
Концептуальное направление развития энергосберегающих тиристорных электроприводов прокатных станов
A.S. Карандаева, В. Храмшин *, Р.Р. Храмшин, И.И. Баранковаб
а Южно-Уральский государственный университет, Россия, 454080, г. Челябинск, проспект Ленина, 76 2 Магнитогорский государственный технический университет им. Носова, просп. 38, Магнитогорск, 455000, Россия
Аннотация
Тиристорные электроприводы прокатных станов, как известно, являются наиболее энергоемкими потребителями на металлургическом комбинате. Очевидно, значительные потери электроэнергии связаны с потреблением реактивной мощности, зависящей от величины резерва выпрямленной ЭДВ тиристорного преобразователя.В статье указаны характерные динамические режимы, обеспечивающие максимальный запас выпрямленного ЭДВ. Оценивается влияние выпрямленного EDV на величину резерва перекоррекции в режиме ударного нагружения. Эксперименты подтвердили влияние отклонения напряжения сети на 10-12% в сторону уменьшения. Резерв исправленного EDV разделен на составляющие. В статье сформулирована концепция создания энергосберегающих систем двухзонного регулирования скорости, основанная на принципах перестройки резерва выпрямленного ЭДК в установившемся и динамическом режимах.Рассмотрены способ и система двухзонального зависимого регулирования скорости в зависимости от выпрямленного EDV тиристорного преобразователя. Доказано, что система обеспечивает постоянный запас выпрямленного ЭДВ тиристорного преобразователя в диапазоне нагрузок электропривода ниже номинального. Целесообразно разработать систему двухзонного регулирования скорости, обеспечивающую энергосбережение за счет снижения запаса выпрямленного ЭДК на всех динамических режимах в течение цикла прокатки.
© 2016 Авторы.Опубликовано ElsevierLtd. Это статья в открытом доступе по лицензии CC BY-NC-ND
.(http://creativecommons.Org/licenses/by-nc-nd/4.0/).
Рецензирование под руководством оргкомитета МКПП 2016
Ключевые слова: широкополосный стан горячей прокатки; тиристорный электропривод; двухзонная регулировка скорости; энергетические показатели; Реактивная сила; запас выпрямленного ЭДВ; анализ; составляющие; концепция энергосбережения; энергосберегающий электропривод.
* Автор, ответственный за переписку. Тел .: + 7-351-943-1256. Электронный адрес: [email protected]
1877-7058 © 2016 Авторы. Опубликовано Elsevier Ltd. Это статья в открытом доступе под лицензией CC BY-NC-ND
.(http://creativecommons.org/licenses/by-nc-nd/4.0/).
Рецензирование под руководством оргкомитета МКПП 2016
DOI: 10.1016 / j.proeng.2016.07.272
1.Введение
Высокая энергоемкость производства чугуна и стали, сопровождающаяся постоянным ростом затрат на энергоресурсы, обуславливает первостепенное значение энергосбережения на всех этапах его технологического процесса [1]. Основным потребителем электроэнергии на металлургическом комбинате является электропривод (ЭД). Суммарная мощность электродвигателей на металлургическом комбинате составляет около 87% мощности всего оборудования, а их потребляемая мощность — около 65% от общей [2, 3].Таким образом, наибольшая экономия электроэнергии может быть получена за счет улучшения энергетических показателей электроприводов, в первую очередь тиристорных ЭД прокатных станов. Энергетические показатели тиристорных ЭД в основном ухудшаются из-за потребления реактивной мощности, вызванного регулированием фазы выпрямленного напряжения (выпрямленное EDV).
Повышение энергетических показателей электроприводов прокатных станов является актуальной задачей в связи с их высокой потребляемой мощностью. Следует отметить, что суммарная мощность оборудования стана горячей прокатки ширины 2000 мм на ОАО «Магнитогорский металлургический комбинат» составляет 362 МВА [4].Мощность электроприводов клетей составляет 139 МВт, из которых более 96 млрд МВт (26,6%) приходится на основные ЭД чистового состава. Удельная мощность электропривода чистовой клети более 14 МВт. Энергетические показатели подобных приводов далеки от оптимальных. Отсюда следует, что поиск резервов энергосбережения у таких мощных потребителей является важной научной и практической задачей.
Задача снижения потерь мощности становится еще более актуальной в связи с переходом широкополосных станов на производство толстых полос из трудно деформируемых сталей [5, 6].Так, полая пуля (полоса толщиной до 18 мм, сляб толщиной до 300 мм) прокатывается на стане 2000 мм. Переход на производство горячекатаной ленты толщиной до 25 мм на современных БШРМ — общемировая тенденция. Полая пуля прокатывается с малыми скоростями и высокой слитностью, то есть высокой неравномерной нагрузкой электроприводов. Исследования режимов прокатки этих полос приведены в [7, 8]. Это качение связано с риском потери управления электроприводом из-за размыкания цепи регулирования скорости.
2. Описание проблемы
Большинство отечественных широкополосных станов горячей прокатки (WSHRM) оснащены электроприводами постоянного тока с двухзонным регулированием скорости. К ним предъявляются самые высокие требования по быстродействию и стабильной работе на динамических режимах обработки при прокатке. Эти требования выполняются, если они обеспечивают требуемый динамический запас системы управления, в первую очередь, запас выпрямленного EDV тиристорного преобразователя (ТП).Это можно объяснить тем, что потеря управления электроприводом (для ЭД стенда — потеря регулирования скорости из-за насыщения тиристорного преобразователя) является аварийным режимом для непрерывных технологических линий. Дополнительное увеличение запаса обеспечивает улучшение стабильности ЭД, но может привести к ухудшению энергетических показателей. Это вызвано повышенным потреблением реактивной мощности в зависимости от степени контроля выпрямленного EDV.
Особенности динамических нагрузок основных электроприводов БШРМ напрямую связаны с поддержанием технологического процесса.Самые тяжелые динамические режимы:
• режим ударного нагружения при захвате полосы;
• движение под нагрузкой при прокатке с ускорением.
Режим ударного нагружения сопровождается перекорректировкой выпрямленного EDV тиристорного преобразователя (ТП). Величина избыточной коррекции зависит от настроек скорости и токовой петли при одинаковых условиях захвата полосы. Для одноинтегрирующей системы регулирования скорости это (16-18)%, для двухинтегрирующей — (19-22)% [9].Максимальный выпрямленный EDV Ed0 TC выбирается с учетом оптимизации режима без размыкания цепи управления скоростью, то есть без насыщения TC. Отношение между Ed0 и фактическим выпрямленным EDV Ed определяет величину резерва выпрямленного EDV. Увеличение запаса приводит к увеличению потребляемой реактивной мощности Q, которая при постоянном токе нагрузки Id зависит от степени регулирования CP выпрямленного EDV Ed [10, 11]:
где а — угол задержки; P — активная мощность;
Для тиристорного электропривода прокатного стана мощностью 2х6300 МВт, запаса выпрямленного ЭДВ 270300 В, то есть 22-25% от ПДС выпрямленного ТП, и номинального тока нагрузки значение реактивной мощности превышает 5 МВАр.Это приводит к потерям электроэнергии в пределах 5-7 млн. КВтч / год. Эти потери определяют необходимость принятия мер по сокращению выпрямленного запаса EDV при сохранении высоких показателей надежности EC.
3. Основная часть
3.1. Потребление реактивной мощности тиристорами ЭД
Термин «резерв выпрямленного EDV» означает разницу между значением выпрямленного EDV TC при нулевом угле задержки и значением выпрямленного EDV в установившемся режиме при максимальной статической нагрузке (AEd = Ed0 -Ed ).
На рис. 1 показаны оциллографы переходных процессов скорости a>, тока цепи якоря I, потока возбуждения F (в относительных единицах), EDV E двигателя и выпрямленного EDV Ed ТК для цикла прокатки. В момент t1 к захвату полосы приложена ударная нагрузка. В период t2 + t3 (около 30 с) появляется переходный процесс, вызванный качением с ускорением (относительно плавное изменение нагрузки). У известных ЭД с двухзонным регулированием скорости последний режим сопровождается повышением выпрямленного КДВ ЭД с 900 до 930 В (на 3.3%) при постоянном двигателе EDV E «860 В.
07:14:00
07:14:10
07:14:20
07:14:30
07:14:40
07:14:50
Рис. 1. Переходные процессы координат электропривода клети за цикл прокатки
Кроме того, представленные осциллографы показывают, что режим оптимизации ударной нагрузки важен для выпрямленного EDV при зарегистрированном ускорении электропривода (около 0.14 с-2). Максимальное значение выпрямленного ТК EDV составляет 968 В; она превышает устойчивое значение примерно на 10%. Следует отметить, что при осциллографическом тестировании режимов захвата полосы были обнаружены действия сверхкоррекции выпрямленного ЭДВ (20-22% от номинального значения).
3.2. Оценка компонентов выпрямленного запаса КДО
Ударное увеличение нагрузки электропривода при захвате металла валками приводит к снижению скорости. Раннее восстановление скоростного режима имеет первостепенное значение для непрерывных станов, так как должен поддерживаться посекундный поток металла, проходящего через каждую клеть.Время восстановления скорости зависит от скорости нарастания тока, поскольку оно определяет крутящий момент двигателя. Вторым условием определения величины резерва являются отклонения напряжения питающей сети [12, 13].
На рис. 2 показаны осциллограммы токов нагрузки электроприводов двух чистовых клетей БШРМ и отклонений напряжения на участке 10 кВ. В моменты t1, t2 прокатки клети захватывают металл, после чего следует скачкообразное повышение тока нагрузки и падение напряжения в сети (на 2% и 1%).5% соответственно). Эксперименты подтверждают снижение уровня напряжения на 5-7% после захвата металла последней стойкой при максимальной нагрузке ЭД.
Рис. 2. Отклонения напряжения сети от нагрузки ЭД чистовых клетей
На рис. 3 показаны отклонения напряжения сети при прокатке трех полос без нагрузки электроприводов клети. Эти отклонения вызваны нагрузкой других потребителей, подключенных к тому же участку шины 10 кВ; они являются эпизодическими для ЭД рассматриваемых стендов.Как видим, их уровень достаточно высок (5-8% от номинальной стоимости).
Приведенные осциллографы подтверждают известную информацию о том, что отклонение напряжения сети питания ЭД станов горячей прокатки составляет 10-12%, в сторону уменьшения и не должно учитываться при расчете запаса по напряжению ТП.
Рис. 3. Отклонения напряжения сети без нагрузки ЭД
На рис. 4 представлены диаграммы, отражающие распределение выпрямленного запаса КДО, необходимого для безотказной оптимизации электропривода ударного нагружения стенда БШРМ [14].Показаны следующие компоненты:
1. Падение напряжения на сопротивлении цепи выпрямленного тока. ImaxR3 (Imax — максимальный ток статической нагрузки, R3 — эквивалентное сопротивление).
2. Запас на динамическое приращение выпрямленного EDV преобразователя при увеличении нагрузки (падение напряжения на индуктивном сопротивлении L3 цепи выпрямленного тока).
3. Составляющая, связанная с отклонениями напряжения питающей сети.
4.Компонент Ed0 (1-косамин) должен определяться пределом минимального угла задержки amin.
Рис. 4. Составные части выпрямленного ЭДВ запаса
Как видно из диаграммы, значение запаса составляет 23,6% от максимального выпрямленного TC EDV или 27% от номинального выпрямленного напряжения.
Принятое разделение запаса выпрямленного EDV на составляющие позволило разработать концепцию двухзонной системы регулирования скорости (с улучшенными энергетическими показателями).В его основе лежит принцип перераспределения резерва
выпрямленное ЭДВ в установившемся и динамическом режимах, связанных с изменением нагрузки электропривода. Для ограничения величины резерва в режиме динамического привода на металле, расположенном между валками (то есть при относительном плавном нарастании тока нагрузки), авторами разработаны метод и система двухзонального зависимого регулирования скорости в зависимости от выпрямленного тока. ЭДВ тиристорного преобразователя. Их отличительная особенность заключается в формировании задающего воздействия на внешний контроллер цепи возбуждения пропорционально номинальному выпрямленному ТП ЭДВ [11].
Функциональная схема системы управления, реализующей предложенный способ, представлена на рис. 5. Сигналы обратной связи поступают с выхода регулятора тока цепи якоря. Таким образом, можно исключить преобразователь выпрямленного EDV. Таким образом устройство упрощается.
Рис. 5. Функциональная схема двухзонной системы регулирования скорости в зависимости от выпрямленного ТП ЭДВ: ТП — тиристорный преобразователь; А — якорь двигателя; СС — регулятор тока цепи якоря; CT — преобразователь тока; СК — регулятор скорости; PuS — датчик включения; ТГ — тахометр-генератор; EC — контроллер EDV; ESD — выпрямленное устройство задания уставки EDV; ECR — регулятор тока возбуждения; ECT — ток возбуждения
Преобразователь; EW — обмотка возбуждения; ТЭ — возбудитель тиристорный
Рис.6 объясняет принцип управления. Он обеспечивает идеализированные зависимости напряжения uM цепи якоря двигателя, EDV e двигателя, выпрямленного TC EDV ed и максимального значения TC EDV overcorrection ed max при ударной нагрузке
Рис. 6. Изменения напряжений и EDV в зависимых системах: а — как функция EDV двигателя при e0 = 1_ p3; б — как выпрямленная функция TC EDV
Кривые на рис. 6, а соответствуют известной системе двухзональной зависимой системы управления как функция EDV двигателя, на рис.6, б — соответствуют предлагаемой двухзонной системе управления в качестве исправленной функции ТК ЭДВ. Кривые нанесены в относительных единицах; номинальный ток Ir и номинальный выпрямленный TC EDV Edr приняты за базовые значения.
Известная система (рис. 6, а) отличается тем, что ЭДВ двигателя поддерживается на уровне е0 = эр = 1-э, КДВ выпрямленного ТП повышается с увеличением нагрузки и при i = 1 достигает номинального значения эд. = 1 (pe — относительное падение напряжения при эквивалентном сопротивлении Re цепи выпрямленного тока pe = Re Ir / Edr).Следовательно, ed <1 во всем диапазоне изменения нагрузки, кроме режима, соответствующего i = 1. Это приводит к увеличению тока якоря и снижению коэффициента мощности в тиристорных системах ЭД.
В предлагаемой системе (рис. 6, б) выпрямленный регулятор EDV поддерживает свою стабильность на номинальном уровне edr = 1 независимо от тока нагрузки в установившемся режиме нагрузки. Напряжение на якоре двигателя (кривая uM) и EDV двигателя (кривая e) снижаются с ростом тока из-за увеличения количества падений напряжения на соответствующих внутренних сопротивлениях.
При этом резерв выпрямленного TC EDV, определяемый как разность между максимальным EDV ed0 и его текущим значением ed max = edr, остается постоянным независимо от тока нагрузки. На основании сравнения рис.6, а и рис.6, б можно сделать вывод, что данная система обеспечивает меньший запас выпрямленного ТП ЭДВ при всех значениях тока i от нуля до номинального и, соответственно, лучшие энергетические показатели. работы ЭД.
4. Обсуждение результатов
При реализации предложенного метода запас выпрямленного ЭДК может быть уменьшен при относительно плавном изменении нагрузки.Таким образом, данная система рекомендована для ЭД непрерывного и реверсивного станов холодной прокатки, работающих в широком диапазоне изменения нагрузки. Этот метод позволяет исключить превышение КДО выпрямителя над значениями, установленными для основных электроприводов ВШРМ при разгоне при прокатке. Таким образом, обеспечивается пониженный запас выпрямленного EDV.
К сожалению, производительность системы управления EDV (в рассматриваемом случае — выпрямленного TC EDV) примерно на порядок ниже, чем у системы управления скоростью при оптимальных настройках регулятора.Таким образом, при ударном нагружении нельзя обеспечить ограничение КДО выпрямителя. Следовательно, авторами предлагается метод зависимого управления потоком возбуждения в зависимости от КДО выпрямленного ТК с автоматическим сбросом КДО выпрямителя [14]. Кроме того, разработаны системы двухзонного управления с переключением координат, управляемые схемой возбуждения [10]. Теоретические и экспериментальные исследования разработанных систем доказывают возможность снижения запаса выпрямленного ТУ ЭДВ практически без ухудшения динамических показателей и надежности электропривода [3, 16-26].
Повышение энергетических показателей вновь создаваемых электроприводов обеспечивается рациональным подбором вторичного напряжения выпрямительного трансформатора. По сравнению с номинальным напряжением известного электропривода аналогичного класса его следует снизить на 10-12%. Это позволяет снизить потребление реактивной мощности на 7-12%, то есть существенно снизить потери мощности практически без капитальных затрат. Практически такой же эффект можно получить для главных электроприводов эксплуатируемых БШТМ за счет переключения ответвлений (или установки дополнительных) вторичных обмоток трансформатора.
Благодарности
Исследование выполнено при финансовой поддержке гранта Президента Российской Федерации № MD-3395.2015.8.
Список литературы
[1] A.S. Карандаев, Усовершенствование автоматических электроприводов для прокатного оборудования, Российский интернет-журнал промышленной инженерии. 1 (2014) 3-15.
[2] И.А. Селиванов, А. Карандаев, С.Евдокимов А. Храмшин, Совершенствование диагностики и автоматизации электроэнергетики, Известия Высших учебных заведений, Электромеханика, Российская электромеханика. 1 (2009) 5-11.
[3] A.S. Карандаев, В. Храмшин, И.Ю. Андрюшин, В. Головин, Новые технические решения в электроприводах и системах управления технологическими параметрами станов горячей прокатки // Известия Тульского государственного университета. 3 (2010) 34-40.
[4] В.Храмшин, Энергосберегающие тиристорные электропрокатные станы, МГТУ, Магнитогорск, 2013.
.[5] А.А. Радионов, А. Карандаев, В. Храмшин, И.Ю. Андрюшин, А. Гостев А.В. Скоростные и нагружающие режимы прокатки полой заготовки на широкополосном прокатном стане // Материалы Международной конференции по машиностроению, автоматике и системам управления (MEACS) 2014 г. (2014). DOI: 10.1109 / MEACS.2014.6986841.
[6] И.Ю. Андрюшин, В. Галкин, В.В. Головин, А.С. Карандаев, А.А. Радионов, В. Храмшин А.В. Автоматическая коррекция клетей скоростного стана в 2000 г. при прокатке трубного состава // Известия высших учебных заведений. Электромеханика. Электромеханика. 4 (2011) 31-35.
[7] В. Гасияров, А. Маклаков, С.С.Воронин, Е.А. Маклакова, Система автоматического регулирования частоты вращения синхронного двигателя, Технологическая инженерия. 129 (2015) 57-62.
[8] A.S. Карандаев, В. Храмшин, А.А. Радионов, И.Ю. Андрюшин, В.В. Галкин, А. Гостев А.В. Согласование скоростей взаимосвязанных электроприводов сепараторов черновой группы прокатного стана // Материалы VII Международной (XVIII Всероссийской) научно-технической конференции по автоматическому электричеству, Иваново. (2012) 652-657.
[9] С.Н. Басков, А. Карандаев, О. Осипов А.В. Силовые параметры приводной системы и стана прокатного стана 2800 // Приводная техника. 1-2 (1999) 21-24.
[10] С.С. Воронин, Е.А. Маклакова, А.С. Маклаков, В. Гасияров, Определение энерго-энергетических параметров мехатронной системы горячего толстолистового стана, Технологическая инженерия. 129 (2015) 51-56.
[11] В.В. Головин, А. Карандаев, В. Храмшин, Оценка эффективности тиристора с автоматическим изменением координат, управляемого цепью возбуждения, Известия Высших учебных заведений, Электромеханика, Электромеханика. 4 (2006) 40-45.
[12] В.В. Головин, А. Карандаев, В.Храмшин Р. Энергосберегающие тиристорные электроприводы с автоматическим изменением координат, управляемые цепью возбуждения // Известия высших учебных заведений. Электромеханика. Электромеханика. 4 (2006) 35-39.
[13] A.S. Карандаев, А.А. Радионов, В. Головин, Двухзонный системно-зависимый регулятор скорости с тиристорным преобразователем с выпрямленным ЭДС, Известия Высших учебных заведений, Электромеханика, Электромеханика. 2 (2004) 40-46.
[14] E.А. Маклакова, А.С. Маклаков, В. Гасияров, С.С.Воронин.Система управления изгибом рабочих валков стана горячей прокатки. 129 (2015) 37-41.
[15] В. Храмшин А.А. Повышение безопасности инвертирующего режима электропривода с тиристорным управлением, применяемого при прокатке лент большого радиуса действия // Электротехника. 2 (2013) 103-107. DOI: 10.3103 / S1068371213020065.
[16] A.S. Карандаев, Г. Корнилов, В.Храмшин, Т. Храмшин А.А. Повышение качества электроэнергии в системе электроснабжения клети широкополосного стана горячей прокатки // Технологии инжиниринга. 129 (2015) 2-8. DOI: 10.1016 / j.proeng.2015.12.002.
[17] A.S. Карандаев, А.А. Радионов, В. Головин, А. Осипов В.Н. Концепция строительства электрокатных станов с двухзонным регулированием скорости и повышения энергоэффективности // Материалы IV Международной (XV Всероссийской) конференции по автоматизированной электротехнике, Магнитогорск.(2004) 260-264.
[18] И.А. Селиванов, А. Карандаев, И. Кузнецов, Анализ приводов с двухзонным регулированием скорости при изменении уставки ЭДС // Известия Высших учебных заведений. Электромеханика. Электромеханика. 3 (1997) 39-46.
[19] А.А. Радионов, В. Гасияров, О.А. Гасиярова, Автоматическое регулирование зазора системы мехатроники управления схемой обзора в плане, в: Материалы Международной сибирской конференции по управлению и связи 2015 г., SIBCON 2015.(2015).
[20] С.С. Воронин, В. Гасияров, Разработка системы управления движением электромеханического винтового механизма стана горячей прокатки, в: Материалы конференции молодых исследователей в области электротехники и электроники IEEE North West Russia 2016, EIConRusNW 2016. (2016) 731-735 .
[21] A.S. Карандаев, В. Храмшин, В. Галкин, А.А. Лукин, Математическое моделирование структуры тиристора с возможностью переключения, Известия Высших учебных заведений, Электромеханика, Электромеханика.3 (2010) 47-53.
[22] В. Храмшин, В. Салганик, В. Жилина А.А., Ячиков И.М.Математическая модель электромеханических систем непрерывной линии широкополосного стана горячей прокатки // Материалы Международной конференции по машиностроению, автоматике и системам управления (MEACS), 2015 г. (2015). DOI: 10.1109 / MEACS.2015.7414892.
[23] A.S. Карандаев, В. Храмшин, А.А. Лукин, Г. Шурыгина, В. Головин, Экспериментальные исследования тиристорных приводов с двухзонным регулированием скорости с улучшенными энергетическими характеристиками, Вестник Южно-Уральского государственного университета, Серия Энергетика.14 (2010) 67-72.
[24] Л.В. Радионова В.А., Чернышев А.Д.Математическое описание замкнутой системы выпрямительного AFE // Технологии процедур. 129 (2015) 16-21.
[25] С.С. Воронин, В. Гасияров, А.А. Радионов, Разработка метода формирования управляющего сигнала для систем автоматизации стана горячей прокатки с целью повышения плоскостности чистового листа // Материалы конференции MATEC Web of Conference.
