Как рассчитать номинальный ток трехфазного асинхронного электродвигателя при разных схемах подключения. Какие параметры необходимы для расчета. На что влияет номинальный ток двигателя. Примеры расчетов для конкретных моделей.
Что такое номинальный ток электродвигателя и зачем его рассчитывать
Номинальный ток электродвигателя — это ток, который потребляет двигатель из сети при номинальной нагрузке в номинальном режиме работы. Знание этого параметра необходимо для:
- Выбора сечения питающих проводов
- Подбора коммутационной и защитной аппаратуры (автоматов, предохранителей, тепловых реле)
- Настройки систем плавного пуска и частотных преобразователей
- Оценки энергопотребления и КПД двигателя
Номинальный ток указывается на заводской табличке двигателя. Однако эти данные могут быть утрачены или недоступны. В таком случае ток необходимо рассчитать по известным параметрам двигателя.
Формулы для расчета номинального тока трехфазного электродвигателя
Для расчета номинального тока трехфазного асинхронного двигателя используются следующие формулы:

При соединении обмоток звездой:
I = P / (√3 * U * cosφ * η)
При соединении обмоток треугольником:
I = P / (3 * U * cosφ * η)
Где:
- I — номинальный ток, А
- P — номинальная мощность двигателя, Вт
- U — линейное напряжение сети, В
- cosφ — коэффициент мощности двигателя
- η — КПД двигателя
Пример расчета для двигателя АИР71А4
Рассмотрим расчет на примере трехфазного асинхронного двигателя АИР71А4 со следующими параметрами:
- Мощность P = 0,55 кВт = 550 Вт
- Напряжение U = 380 В (соединение звездой)
- КПД η = 0,75
- cosφ = 0,71
Подставляем значения в формулу:
I = 550 / (√3 * 380 * 0,71 * 0,75) = 1,59 А
Расчетное значение практически совпадает с указанным на шильдике двигателя номинальным током 1,6 А при соединении звездой.
Особенности расчета номинального тока при разных схемах подключения
При переключении обмоток двигателя со звезды на треугольник меняется подводимое к каждой обмотке напряжение:
- При соединении звездой на обмотку подается фазное напряжение 220 В
- При соединении треугольником — линейное напряжение 380 В
Соответственно, ток в обмотках и потребляемый из сети ток также изменяются. При переключении со звезды на треугольник номинальный ток увеличивается примерно в √3 раз.
Влияние параметров двигателя на номинальный ток
На величину номинального тока электродвигателя влияют следующие факторы:
- Мощность двигателя — чем она выше, тем больше ток
- Напряжение питания — при повышении напряжения ток снижается
- КПД — более эффективные двигатели потребляют меньший ток
- Коэффициент мощности — при его увеличении ток уменьшается
- Число пар полюсов — высокооборотные двигатели имеют меньший ток
Как изменяется номинальный ток при изменении нагрузки двигателя
Номинальный ток соответствует работе двигателя при номинальной нагрузке. При изменении нагрузки на валу ток также меняется:
- При уменьшении нагрузки ток снижается, но не пропорционально мощности
- При увеличении нагрузки выше номинальной ток возрастает
- Ток холостого хода составляет 20-50% от номинального
- Пусковой ток в 5-7 раз превышает номинальный
Поэтому важно правильно подбирать мощность двигателя под конкретную нагрузку.
Способы снижения пускового тока электродвигателя
Высокий пусковой ток является недостатком асинхронных двигателей. Для его ограничения применяются следующие методы:
- Использование устройств плавного пуска
- Применение частотных преобразователей
- Переключение обмоток со звезды на треугольник
- Включение через автотрансформатор
- Использование пусковых реостатов в цепи ротора
Эти способы позволяют снизить пусковой ток в 2-5 раз по сравнению с прямым пуском.
Практические рекомендации по выбору защитной аппаратуры
При выборе автоматических выключателей и тепловых реле для защиты электродвигателей необходимо учитывать следующее:
- Номинальный ток теплового расцепителя должен быть в 1,2-1,3 раза больше номинального тока двигателя
- Ток срабатывания электромагнитного расцепителя — в 7-10 раз больше номинального
- Для двигателей с частыми пусками защита должна иметь задержку срабатывания
- При использовании устройств плавного пуска защита настраивается по пусковому току этих устройств
Правильный выбор защитной аппаратуры обеспечит надежную работу электродвигателя и защитит его от аварийных режимов.
Номинальный ток электродвигателя
Подавляющее большинство электродвигателей, используемых в промышленности, относятся к трехфазному асинхронному типу. Для питания таких устройств необходима промышленная трехфазная сеть переменного тока, обеспечивающая сетевое напряжение заданной частоты и напряжения. Высокая популярность асинхронных электродвигателей обусловлена дешевизной, простотой изготовления и механической прочностью данных устройств. Кроме того, изменяя схему подключения обмоток (звезда или треугольник) можно подключать двигатель к сетям различного напряжения (обычно используются комбинации 220/380 и 127/220В).
Высокий стартовый ток – главный недостаток асинхронного электродвигателя
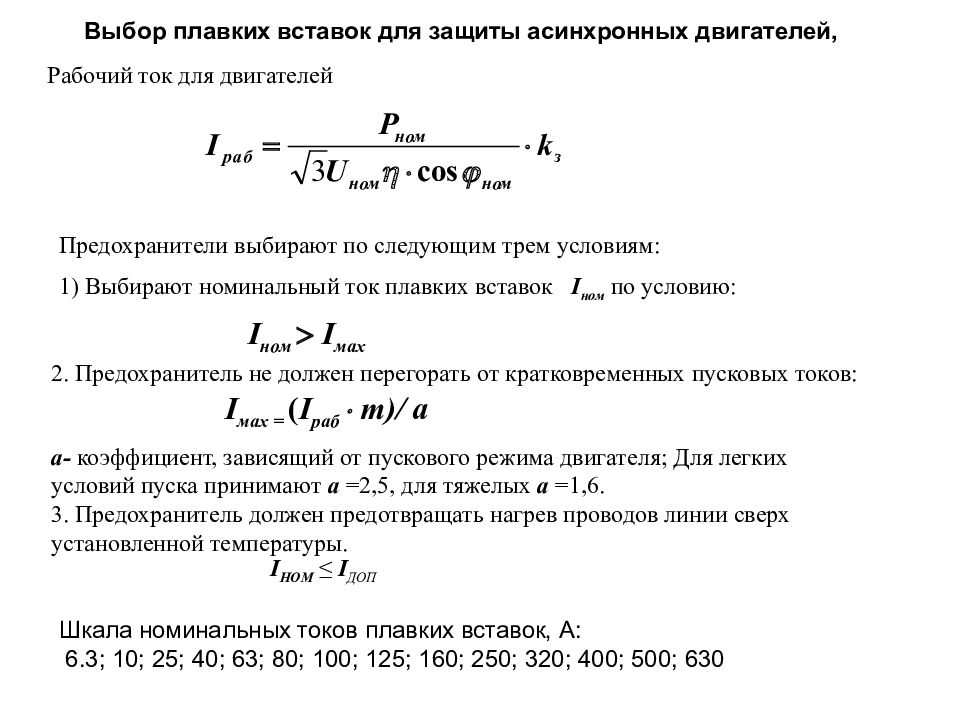
Однако несмотря на множество неоспоримых преимуществ, асинхронные двигатели имеют минусы, среди которых одним из наиболее значительных является достаточно большой пусковой ток электродвигателя данного типа. Особенно заметен этот недостаток в асинхронных устройствах с короткозамкнутым ротором. Такие двигатели следует с осторожностью применять, в тех системах, для которых требуется значительный пусковой момент, который может привести к превышению номинального значения силы тока (Iн).
Такие двигатели следует с осторожностью применять, в тех системах, для которых требуется значительный пусковой момент, который может привести к превышению номинального значения силы тока (Iн).
Для большинства асинхронных электродвигателей допустимо кратковременное превышение значение Iн, которое может произойти в момент пуска. Так, в момент запуска, допускается шестикратное превышение значения номинального тока при условии, что оно будет длиться не более 5 секунд. В случае, если в некотором режиме номинальный ток превышается не более чем в два раза, допускается увеличить время работы устройства в этом режиме до 15 секунд.
Расчет номинального значения тока асинхронного электродвигателя
Номинальный ток электродвигателя, при котором возможна его длительная работа, связан с номинальной мощностью устройства и его КПД следующим выражением: Iн=1000*Pн/(Uн*cosφ√η), где Рн – мощность, Uн – номинальное напряжение, которым питается электродвигатель, η – КПД, а cosφ – коэффициент мощности двигателя.
Отсюда можно сделать важный вывод, который состоит в том, что при уменьшении U (например при переключении устройства из сети в 220 В сеть 127 В), увеличивается ток двигателя, который может превысить номинальное значение. А длительная работа двигателя на токе I>Iн может привести не только к его повреждению, но и к возгоранию. Поэтому, используемые в системе с электрическим двигателем предохранительные устройства должны быть подобраны так, чтобы предотвратить продолжительную работу при токе I>Iн.
Просмотров: 14729
Дата: Воскресенье, 15 Декабрь 2013
Номинальные значения рабочей мощности и тока электродвигателей
Классы компонентов:
1.6.1.1.1. Модульные автоматические выключатели (ВАМ, МСВ), 1.6.5.1. Модульные контакторы, 1.6.1.2.1. Мотор-автоматы (автоматические выключатели защиты двигателей, MPCB), 1.6.1.3.1. Автоматические выключатели в литом корпусе (MCCB), 1.
Значения тока, приведенные ниже, относятся к стандартным трехфазным четырехполюсным асинхронным электродвигателям с КЗ ротором (1500 об/мин при 50 Гц, 1800 об/мин при 60 Гц). Данные значения представлены в качестве ориентира и могут варьироваться в зависимости от производителя электродвигателя и количества полюсов.
| Мощность электродвигателя | Номинальный ток электродвигателя: стандартные значения обозначены синим цветом (в соответствии с МЭК 60947-4-1, приложение G) |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 220В | 230В | 240В | 380В | 400В | 415В | 440В | 500В | 660В | 690В | |
| 0,06 кВт | 0,37 | 0,35 | 0,34 | 0,21 | 0,2 | 0,19 | 0,18 | 0,16 | 0,13 | 0,12 |
| 0,09 кВт | 0,54 | 0,52 | 0,5 | 0,32 | 0,3 | 0,29 | 0,26 | 0,24 | 0,18 | 0,17 |
| 0,12 кВт | 0,73 | 0,7 | 0,67 | 0,46 | 0,44 | 0,42 | 0,39 | 0,32 | 0,24 | 0,23 |
| 0,18 кВт | 1 | 1 | 1 | 0,63 | 0,6 | 0,58 | 0,53 | 0,48 | 0,37 | 0,35 |
| 0,25 кВт | 1,6 | 1,5 | 1,4 | 0,9 | 0,85 | 0,82 | 0,74 | 0,68 | 0,51 | 0,49 |
| 0,37 кВт | 2 | 1,9 | 1,8 | 1,2 | 1,1 | 1,1 | 1 | 0,88 | 0,67 | 0,64 |
| 0,55 кВт | 2,7 | 2,6 | 2,5 | 1,6 | 1,5 | 1,4 | 1,3 | 1,2 | 0,91 | 0,87 |
| 0,75 кВт | 3,5 | 3,3 | 3,2 | 2 | 1,9 | 1,8 | 1,7 | 1,5 | 1,15 | 1,1 |
| 1,1 кВт | 4,9 | 4,7 | 4,5 | 2,8 | 2,7 | 2,6 | 2,4 | 2,2 | 1,7 | 1,6 |
| 1,5 кВт | 6,6 | 6,3 | 6 | 3,8 | 3,6 | 3,5 | 3,2 | 2,9 | 2,2 | 2,1 |
| 2,2 кВт | 8,9 | 8,5 | 8,1 | 5,2 | 4,9 | 4,7 | 4,3 | 3,9 | 2,9 | 2,8 |
| 3 кВт | 11,8 | 11,3 | 10,8 | 6,8 | 6,5 | 6,3 | 5,7 | 5,2 | 4 | 3,8 |
| 4 кВт | 15,7 | 15 | 14,4 | 8,9 | 8,5 | 8,2 | 7,4 | 6,8 | 5,1 | 4,9 |
| 5,5 кВт | 20,9 | 20 | 19,2 | 12,1 | 11,5 | 11,1 | 10,1 | 9,2 | 7 | 6,7 |
| 7,5 кВт | 28,2 | 27 | 25,9 | 16,3 | 15,5 | 14,9 | 13,6 | 12,4 | 9,3 | 8,9 |
| 11 кВт | 39,7 | 38 | 36,4 | 23,2 | 22 | 21,2 | 19,3 | 17,6 | 13,4 | 12,8 |
| 15 кВт | 53,3 | 51 | 48,9 | 30,5 | 29 | 28 | 25,4 | 23 | 17,8 | 17 |
| 18,5 кВт | 63,8 | 61 | 58,5 | 36,8 | 35 | 33,7 | 30,7 | 28 | 22 | 21 |
| 22 кВт | 75,3 | 72 | 69 | 43,2 | 41 | 39,5 | 35,9 | 33 | 25,1 | 24 |
| 30 кВт | 100 | 96 | 92 | 57,9 | 55 | 53 | 48,2 | 44 | 33,5 | 32 |
| 37 кВт | 120 | 115 | 110 | 69 | 66 | 64 | 58 | 53 | 40,8 | 39 |
| 45 кВт | 146 | 140 | 134 | 84 | 80 | 77 | 70 | 64 | 49,1 | 47 |
| 55 кВт | 177 | 169 | 162 | 102 | 97 | 93 | 85 | 78 | 59,6 | 57 |
| 75 кВт | 240 | 230 | 220 | 139 | 132 | 127 | 116 | 106 | 81 | 77 |
| 90 кВт | 291 | 278 | 266 | 168 | 160 | 154 | 140 | 128 | 97 | 93 |
| 110 кВт | 355 | 340 | 326 | 205 | 195 | 188 | 171 | 156 | 118 | 113 |
| 132 кВт | 418 | 400 | 383 | 242 | 230 | 222 | 202 | 184 | 140 | 134 |
| 160 кВт | 509 | 487 | 467 | 295 | 280 | 270 | 245 | 224 | 169 | 162 |
| 200 кВт | 637 | 609 | 584 | 368 | 350 | 337 | 307 | 280 | 212 | 203 |
| 250 кВт | 782 | 748 | 717 | 453 | 430 | 414 | 377 | 344 | 261 | 250 |
| 315 кВт | 983 | 940 | 901 | 568 | 540 | 520 | 473 | 432 | 327 | 313 |
| 355 кВт | 1109 | 1061 | 1017 | 642 | 610 | 588 | 535 | 488 | 370 | 354 |
| 400 кВт | 1255 | 1200 | 1150 | 726 | 690 | 665 | 605 | 552 | 418 | 400 |
| 500 кВт | 1545 | 1478 | 1416 | 895 | 850 | 819 | 745 | 680 | 515 | 493 |
| 560 кВт | 1727 | 1652 | 1583 | 1000 | 950 | 916 | 832 | 760 | 576 | 551 |
| 630 кВт | 1928 | 1844 | 1767 | 1116 | 1060 | 1022 | 929 | 848 | 643 | 615 |
| 710 кВт | 2164 | 2070 | 1984 | 1253 | 1190 | 1147 | 1043 | 952 | 721 | 690 |
| 800 кВт | 2446 | 2340 | 2243 | 1417 | 1346 | 1297 | 1179 | 1076 | 815 | 780 |
| 900 кВт | 2760 | 2640 | 2530 | 1598 | 1518 | 1463 | 1330 | 1214 | 920 | 880 |
| 1000 кВт | 3042 | 2910 | 2789 | 1761 | 1673 | 1613 | 1466 | 1339 | 1014 | 970 |
|
|
Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Таблица : номинальный ток электродвигателя = электромотора при полной нагрузке однофазных и 3-х фазных моторов в зависимости от напряжения 110VAC, 220VAC, 240VAC, 380VAC, 415VAC, 550VAC; Мощность 0,07-150кВт. Сила тока в зависимости от мощности
Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста.
Вложите в письмо ссылку на страницу с ошибкой, пожалуйста. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers Консультации и техническая |
Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Сила тока в зависимости от мощности
Сила тока в зависимости от мощности  Сила тока в зависимости от мощности
Сила тока в зависимости от мощности  07 kW
07 kW 9
9 2 kW
2 kW 5 kW
5 kW 1 kW
1 kW 5
5 4
4 5
5 3 kW
3 kW Введите свой запрос:
Введите свой запрос:
Расчет номинального тока электродвигателя | Заметки электрика
Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Решил написать статью о расчете номинального тока для трехфазного электродвигателя.
Этот вопрос является актуальным и кажется на первый взгляд не таким и сложным, но почему-то в расчетах зачастую возникают ошибки.
В качестве примера для расчета я возьму трехфазный асинхронный двигатель АИР71А4 мощностью 0,55 (кВт).
Вот его внешний вид и бирка с техническими данными.
Если двигатель Вы планируете подключать в трехфазную сеть 380 (В), то значит его обмотки нужно соединить по схеме «звезда», т.е. на клеммнике необходимо соединить выводы V2, U2 и W2 между собой с помощью специальных перемычек.
При подключении этого двигателя в трехфазную сеть напряжением 220 (В) его обмотки необходимо соединить треугольником, т.е. установить три перемычки: U1-W2, V1-U2 и W1-V2.
Если же Вы решите подключить этот двигатель в однофазную сеть 220 (В), то его обмотки также должны быть соединены треугольником.
Для информации: почитайте подробную статью о схемах соединения обмоток в «звезду» и «треугольник».

Для правильного выбора автоматического выключателя (или предохранителей) и тепловых реле для защиты двигателя, а также для выбора контактора для его управления, в первую очередь нам нужно знать номинальный ток двигателя для конкретной схемы соединения обмоток.
Обычно, номинальные токи указаны прямо на бирке, поэтому можно смело ориентироваться на них. Но иногда циферки не видны или стерты, а известна только лишь мощность двигателя или другие его параметры.
Такое очень часто встречается, но еще чаще бирка вообще отсутствует или так затерта, что на ней абсолютно ничего не видно — приходится только догадываться, что там изображено.
Но это отдельный случай и что делать в таких ситуациях, я расскажу Вам в ближайшее время.
В данной же статье я хочу акцентировать Ваше внимание на формулу по расчету тока двигателя, потому что даже не все «специалисты» ее знают, хотя может и знают, но не хотят вспомнить основы электротехники.
Итак, приступим.

Внимание! Мощность на шильдике двигателя указывается не электрическая, а механическая, т.е. полезная механическая мощность на валу двигателя. Об этом отчетливо говорится в действующем ГОСТ Р 52776-2007, п.5.5.3:
Полезную механическую мощность обозначают, как Р2.
Чаще всего мощность двигателя указывают не в ваттах (Вт), а в киловаттах (кВт). Для тех кто забыл, читайте статью о том, как перевести ватты в киловатты и наоборот.
Еще реже, на бирке указывают мощность в лошадиных силах (л.с.), но такого я ни разу еще не встречал на своей практике. Для информации: 1 (л.с.) = 745,7 (Ватт).
Но нас интересует именно электрическая мощность, т.е. мощность, потребляемая двигателем из сети. Активная электрическая мощность обозначается, как Р1 и она всегда будет больше механической мощности Р2, т.к. в ней учтены все потери двигателя.
1. Механические потери (Рмех.)
К механическим потерям относятся трение в подшипниках и вентиляция. Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
У асинхронных трехфазных двигателей с фазным ротором еще учитываются потери между щетками и контактными кольцами. Более подробно об устройстве асинхронных двигателей Вы можете почитать здесь.
2. Магнитные потери (Рмагн.)
Магнитные потери возникают в «железе» магнитопровода. К ним относятся потери на гистерезис и вихревые токи при перемагничивании сердечника.
Величина магнитных потерь в статоре зависит от частоты перемагничивания его сердечника. Частота всегда постоянная и составляет 50 (Гц).
Магнитные потери в роторе зависят от частоты перемагничивания ротора. Эта частота составляет 2-4 (Гц) и напрямую зависит от величины скольжения двигателя. Но магнитные потери в роторе имеют малую величину, поэтому в расчетах чаще всего не учитываются.
3. Электрические потери в статорной обмотке (Рэ1)
Электрические потери в обмотке статора вызваны их нагревом от проходящих по ним токам. Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
4. Электрические потери в роторе (Рэ2)
Электрические потери в роторе аналогичны потерям в статорной обмотке.
5. Прочие добавочные потери (Рдоб.)
К добавочным потерям можно отнести высшие гармоники магнитодвижущей силы, пульсацию магнитной индукции в зубцах и прочее. Эти потери очень трудно учесть, поэтому их принимают обычно, как 0,5% от потребляемой активной мощности Р1.
Все Вы знаете, что в двигателе электрическая энергия преобразуется в механическую. Если объяснить чуть подробнее, то при подведенной к двигателю электрической активной мощности Р1, некоторая ее часть затрачивается на электрические потери в обмотке статора и магнитные потери в магнитопроводе. Затем остаточная электромагнитная мощность передается на ротор, где она расходуется на электрические потери в роторе и преобразуется в механическую мощность. Часть механической мощности уменьшается за счет механических и добавочных потерь. В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
Все эти потери и заложены в единственный параметр — коэффициент полезного действия (КПД) двигателя, который обозначается символом «η» и определяется по формуле:
η = Р2/Р1
Кстати, КПД примерно равен 0,75-0,88 для двигателей мощностью до 10 (кВт) и 0,9-0,94 для двигателей свыше 10 (кВт).
Еще раз обратимся к данным, рассматриваемого в этой статье двигателя АИР71А4.
На его шильдике указаны следующие данные:
- тип двигателя АИР71А4
- заводской номер № ХХХХХ
- род тока — переменный
- количество фаз — трехфазный
- частота питающей сети 50 (Гц)
- схема соединения обмоток ∆/Y
- номинальное напряжение 220/380 (В)
- номинальный ток при треугольнике 2,7 (А) / при звезде 1,6 (А)
- номинальная полезная мощность на валу Р2 = 0,55 (кВт) = 550 (Вт)
- частота вращения 1360 (об/мин)
- КПД 75% (η = 0,75)
- коэффициент мощности cosφ = 0,71
- режим работы S1
- класс изоляции F
- класс защиты IP54
- название предприятия и страны изготовителя
- год выпуска 2007
Расчет номинального тока электродвигателя
В первую очередь необходимо найти электрическую активную потребляемую мощность Р1 из сети по формуле:
Р1 = Р2/η = 550/0,75 = 733,33 (Вт)
Величины мощностей подставляются в формулы в ваттах, а напряжение — в вольтах.
КПД (η) и коэффициент мощности (cosφ) — являются безразмерными величинами.
Но этого не достаточно, потому что мы не учли коэффициент мощности (cosφ), а ведь двигатель — это активно-индуктивная нагрузка, поэтому для определения полной потребляемой мощности двигателя из сети воспользуемся формулой:
S = P1/cosφ = 733,33/0,71 = 1032,85 (ВА)
Найдем номинальный ток двигателя при соединении обмоток в звезду:
Iном = S/(1,73·U) = 1032,85/(1,73·380) = 1,57 (А)
Найдем номинальный ток двигателя при соединении обмоток в треугольник:
Iном = S/(1,73·U) = 1032,85/(1,73·220) = 2,71 (А)
Как видите, получившиеся значения равны токам, указанным на бирке двигателя.
Для упрощения, выше приведенные формулы можно объединить в одну общую. В итоге получится:
Iном = P2/(1,73·U·cosφ·η)
Поэтому, чтобы определить номинальный ток двигателя, необходимо в данную формулу подставлять механическую мощность Р2, взятую с бирки, с учетом КПД и коэффициента мощности (cosφ), которые указаны на той же бирке или в паспорте на электродвигатель.
Перепроверим формулу.
Ток двигателя при соединении обмоток в звезду:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·380·0,71·0,75) = 1,57 (А)
Ток двигателя при соединении обмоток в треугольник:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·220·0,71·0,75) = 2,71 (А)
Надеюсь, что все понятно.
Примеры
Решил привести еще несколько примеров с разными типами двигателей и мощностями. Рассчитаем их номинальные токи и сравним с токами, указанными на их бирках.
1. Асинхронный двигатель 2АИ80А2ПА мощностью 1,5 (кВт)
Как видите, этот двигатель можно подключить только в трехфазную сеть напряжением 380 (В), т.к. его обмотки собраны в звезду внутри двигателя, а в клеммник выведено всего три конца, поэтому:
Iном = P2/(1,73·U·cosφ·η) = 1500/(1,73·380·0,85·0,82) = 3,27 (А)
Полученный ток 3,27 (А) соответствует номинальному току 3,26 (А), указанному на бирке.
2. Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Данный двигатель можно подключать в трехфазную сеть напряжением, как на 380 (В) звездой, так и на 220 (В) треугольником, т.к. в клеммник у него выведено 6 концов:
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·380·0,83·0,83) = 6,62 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·220·0,83·0,83) = 11,44 (А) — треугольник
Полученные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на бирке.
3. Асинхронный двигатель АИРС100А4 мощностью 4,25 (кВт)
Аналогично, предыдущему.
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·380·0,78·0,82) = 10,1 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·220·0,78·0,82) = 17,45 (А) — треугольник
Расчетные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на шильдике двигателя.
4. Высоковольтный двигатель А4-450Х-6У3 мощностью 630 (кВт)
Этот двигатель можно подключить только в трехфазную сеть напряжением 6 (кВ). Схема соединения его обмоток — звезда.
Схема соединения его обмоток — звезда.
Iном = P2/(1,73·U·cosφ·η) = 630000/(1,73·6000·0,86·0,947) = 74,52 (А)
Расчетный ток 74,52 (А) соответствует номинальному току 74,5 (А), указанному на бирке.
Дополнение
Представленные выше формулы это конечно хорошо и по ним расчет получается более точным, но есть в простонародье более упрощенная и приблизительная формула для расчета номинального тока двигателя, которая наибольшее распространение получила среди домашних умельцев и мастеров.
Все просто. Берете мощность двигателя в киловаттах, указанную на бирке и умножаете ее на 2 — вот Вам и готовый результат. Только данное тождество уместно для двигателей 380 (В), собранных в звезду. Можете проверить и поумножать мощности приведенных выше двигателей. Но лично я же настаиваю Вам использовать более точные методы расчета.
P.S. А вот теперь, как мы уже определились с токами, можно приступать к выбору автоматического выключателя, предохранителей, тепловой защиты двигателя и контакторов для его управления.
Об этом я расскажу Вам в следующих своих публикациях. Чтобы не пропустить выход новых статей — подписывайтесь на рассылку сайта «Заметки электрика». До новых встреч.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Пусковые токи асинхронных электродвигателей — ООО «СЗЭМО Электродвигатель»
Пусковым называется ток, необходимый для осуществления запуска электрического двигателя. Пусковые токи асинхронных электродвигателей обычно в несколько раз превышают показатели, достаточные для работы в нормальном режиме.
Пусковые токи асинхронных электродвигателей
Двигатели асинхронного типа в момент подключения к электросети потребляют значительное количество энергии для того, чтобы:
- привести ротор в движение;
- поднять скорость вращения с нуля до рабочего уровня.
Этим объясняется необходимость использования большого пускового тока, который существенно отличается от количества электроэнергии, позволяющего поддерживать постоянное число оборотов. Это характерно не только для асинхронных, но и для однофазных двигателей постоянного тока, хотя принцип действия последних совершенно иной.
Это характерно не только для асинхронных, но и для однофазных двигателей постоянного тока, хотя принцип действия последних совершенно иной.
Проблема высоких пусковых токов: решение
Высокий пусковой ток может спровоцировать резкое, хотя и кратковременное падение напряжения, при котором прочие подключенные к сети устройства испытают недостаток энергии. Это нежелательно, поскольку негативно влияет на безопасность работы и долговечность оборудования.
Для решения задачи предусмотрены специальные дополнительные устройства, установка которых в процессе подключения и наладки двигателей позволяет:
- максимально уменьшить значение пускового тока;
- повысить плавность запуска;
- снизить затраты на запуск агрегата, так как становится возможным применение менее мощных дизельных электростанций, стабилизаторов, проводов с меньшим сечением и пр.
Наибольшей эффективностью отличаются такие современные устройства, как частотные преобразователи и софтстартеры. Они обеспечивают высокую (более минуты) продолжительность поддержания пускового тока.
Они обеспечивают высокую (более минуты) продолжительность поддержания пускового тока.
Как рассчитать пусковой ток электродвигателя
Чтобы объективно оценить сложность условий запуска двигателя, необходимо предварительно узнать величину необходимого для этого пускового тока. Основные этапы расчета следующие:
- вычисление номинального тока;
- определение значения пускового тока (в амперах).
Для того чтобы получить значение номинального тока для используемой модели электродвигателя, применяют формулу, которая имеет вид Iн=1000Pн / (Uн*cosφ*√ηн). Pн и Uн – это номинальные показатели мощности и напряжения, cosφ и ηн – номинальные коэффициенты мощности и полезного действия.
Собственно пусковой ток, который обозначается как Iп, определяется при помощи формулы Iп = Iн * Kп, где Kп – это кратность постоянного тока по отношению к его номинальному значению (Iн). Всю необходимую для проведения расчетов информацию (значения Kп, Pн, ηн, cosφ, Uн) можно найти в технической документации, которая прилагается к электродвигателю.
Корректный расчет пускового тока двигателя способствует правильному выбору автоматических выключателей, предназначенных для защиты линии включения, а также приобретению дополнительного оборудования (генераторы и пр.) с подходящими параметрами.
Ток электродвигателя, какую силу тока потребляет двигатель, мотор при пуске и работе.
Производители на самом корпусе электрических двигателей ставят металлическую табличку, на которой написаны основные характеристики данного электродвигателя.
На этой табличке указан и ток, который потребляет данная электрическая машина при своей номинальной работе (средне допустимой, с нормальной нагрузкой на валу двигателя). Данная надпись может иметь два значения, например 5,9/3,4А, что означает – при подключении двигателя в режиме «треугольник» номинальные ток будет равен 5,9 ампер, а при подключении в режиме «звезда» он будет 3,4 ампера. На этой же табличке можно увидеть и символы, указывающие данные режимы работы.
Если по каким-то причинам на корпусе электродвигателя нет надписи, какую номинальную силу тока он потребляет, то ток можно вычислить по следующей формуле (если конечно известны все остальные, имеющиеся в этой формуле, величины!):
При отсутствии металлической таблички с основными характеристиками на корпусе электрического двигателя можно пойти более простым путем, чтобы узнать приближенную силу тока, потребляемой движком. Если известна номинальная мощность двигателя, то применим следующее условие – «киловатт электрической мощности равен двум амперам тока» (это условие подходит для электродвигателей с мощностью от 3-х киловатт и более, то есть будет максимально приближенным). Например, у нас есть асинхронный электрический двигатель мощностью 5 кВт (5000 ватт). Следовательно, приближенное значение потребляемого тока будет около 10 ампер. Может возникнуть небольшая непонятка. Если воспользоваться простой формулой вычисления тока, зная мощность и напряжение: 5000 ватт / 380 вольт = 13,15 ампер. Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Практическим вариантом узнать значение силы тока, который потребляется электродвигателем при его номинальной работе, будет использование обычного амперметра, или токоизмерительных клещей. При уверенности в том, что наш электродвигатель точно рассчитан на то напряжение, что мы собираемся на него подать, мы даем питание на него. Далее, все просто, берем токоизмерительные клещи и измеряем силу тока на проводах, что питают наш электродвигатель. Причем еще стоит обратить внимание на то, что у трехфазного электродвигателя рабочие токи должны быть одинаковыми на всех трех фазах. Если Вы вдруг обнаружили факт неодинаковости, то причиной может быть, как перекос фаз электрического питания, так и неисправности самого электродвигателя, который может в скором времени вовсе выйти из строя из-за ненормального режима своей работы. В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
Помимо номинального тока, который потребляется электродвигателем при нормальной своей работе, существует еще так называемый пусковой ток. Его величина может быть превышать номинальный ток аж в 3-8 раз. То есть, когда мы подаем питание на электрический двигатель, который до этого находился в состоянии покоя, в начальный момент по его обмоткам начинает протекать увеличенный ток по причине нескомпенсированности сил электромагнитных полей внутри двигателя. Чем быстрее электродвигатель начинает вращаться, тем меньше тока он начинает потреблять. То есть, пусковым током считается то значение электрического тока, которое существует с момента включения электродвигателя и до выхода его на свои номинальные обороты (время разгона двигателя от нуля до нормального значения).
Минимальный ток, что будет течь через обмотки электрического двигателя, будет тогда, когда движок работает на холостом ходу (то есть, к его валу не подсоединено ни одной механической нагрузки). Следовательно, чем сильнее мы нагрузим вал двигателя, тем большую силу тока начнет он потреблять. Номинальной нагрузкой считается та, на которую изначально данный электродвигатель был рассчитан при своем изготовлении, и при которой эта электрическая машина может работать продолжительное время без вреда для себя. Имеется также понятие о максимальной нагрузке, при которой сила тока, что потребляется двигателем, находится на предельно допустимом значении. При максимальных токах электродвигатели могут работать лишь незначительный промежуток времени, поскольку длительная работа может негативно влиять на сам движок (перегрев), сокращая его общий срок службы.
Следовательно, чем сильнее мы нагрузим вал двигателя, тем большую силу тока начнет он потреблять. Номинальной нагрузкой считается та, на которую изначально данный электродвигатель был рассчитан при своем изготовлении, и при которой эта электрическая машина может работать продолжительное время без вреда для себя. Имеется также понятие о максимальной нагрузке, при которой сила тока, что потребляется двигателем, находится на предельно допустимом значении. При максимальных токах электродвигатели могут работать лишь незначительный промежуток времени, поскольку длительная работа может негативно влиять на сам движок (перегрев), сокращая его общий срок службы.
Пусковые токи у разных электродвигателей разные, их можно посмотреть в справочных таблицах, где прописаны характеристики каждого конкретного движка. Для чего нужно знать значение пусковых токов? Для того, чтобы правильно подобрать устройства защиты для электрических цепей, которые непосредственно относятся к схеме этого электрического двигателя. Например, зная конкретную величину пускового тока мы правильно можем подобрать тепловую защиту под него, автоматически выключатель, что отвечает за включение и выключение данного двигателя и т.д. Это избавит нас от таких проблем как постоянное срабатывание токовой защиты (если устройство рассчитано на меньший ток, чем нужно) или не срабатывание тогда, когда это нужно (если ток срабатывания устройства гораздо больше нужного).
Например, зная конкретную величину пускового тока мы правильно можем подобрать тепловую защиту под него, автоматически выключатель, что отвечает за включение и выключение данного двигателя и т.д. Это избавит нас от таких проблем как постоянное срабатывание токовой защиты (если устройство рассчитано на меньший ток, чем нужно) или не срабатывание тогда, когда это нужно (если ток срабатывания устройства гораздо больше нужного).
Большие пусковые токи – это негативное явление, которое на короткий промежуток времени создает просадку питающей сети. В этой электросети возникает кратковременное падение напряжения. Как можно уменьшить пусковые токи электродвигателя? Первый вариант (классический), это запускать электродвигатель по схеме «звезда», а спустя некоторое время переключаться на схему «треугольник». В этом случае при включении начальный, пусковой ток будет относительно небольшой, а при переключении режима в «треугольник» движок выйдет на свои номинальные обороты.
Иными вариантами снижения пусковых токов электродвигателя являются использование различных устройств плавного пуска, которые за счет электронных схем контролируют начальный режим разгона электрической машины. Допустим при использовании преобразователей частоты можно легко задать нужные параметры для старта и последующий работы электрического двигателя.
Допустим при использовании преобразователей частоты можно легко задать нужные параметры для старта и последующий работы электрического двигателя.
P.S. Правильные режим работы любого электродвигателя способствует увеличению общего срока службы данного электротехнического устройства, а также щадящей работе тех электрических цепей, что относятся к питанию данного устройства (включая и саму питающую сеть).
Расчет тока электродвигателя
Новости / Расчет тока электродвигателяРасчет тока электродвигателя
Расчет тока электродвигателя
Расчет номинального тока трехфазного асинхронного электродвигателя
Для корректного выбора системы электрификации подъемно – транспортного механизма будь то троллейный шинопровод или кабельный подвод, необходимо знать номинальный ток электрической установки.
Ниже приведена форма расчета трехфазного асинхронного электродвигателя переменного тока:
Iн=Pн/√3*Uн*cosφн*ηн или Pн/1,73*Uн*cosφн*ηн,
где Рн — номинальная мощность электродвигателя (Вт),
Uн — номинальное напряжение электродвигателя (В),
ηн — номинальный коэффициент полезного действия двигателя,
cos φн — номинальный коэффициент мощности двигателя.
Номинальные данные электродвигателя указываются на заводской шильде или в иной технической документации, прилагаемой к электродвигателю.
Для удобства приведем пример расчета:
Необходимо определить номинальный ток трехфазного асинхронного электродвигателя переменного тока,
если Рн = 25 кВт, номинальное напряжение Uн = 380 В, номинальный коэффициент
полезного действия ηн = 0,9, номинальный коэффициент мощности cos
φн = 0,8.
Номинальное напряжение трехфазной сети 380 В — соединение обмоток двигателя по схеме «звезда».
Номинальное напряжение трехфазной сети 220 В — соединение обмоток двигателя по схеме «треугольник».
Переводим номинальную мощность из кВт в Ватты:
Pн = 25 кВт = 1000*25 = 25000 Вт
Далее:
Iн = 25000/√3*380 * 0,8 * 0,9 = 25000/1,73*380*0,8*0,9 = 52,8 А.
Поделиться ссылкой:
- Рекомендуем
- Комментарии
IP65 степень герметичности оборудования
IP-рейтинг (Ingress Protection Rating, входная защита) — система классификации степеней защиты оболочки электрооборудования от проникновения твёрдых предметов и воды в соответствии с международным стандартом IEC 60529 (DIN 40050, ГОСТ 14254-96). К примеру, радиоуправление для крана F21-E1B имеет класс герметизации IP-65. Первая цифра означ…
К примеру, радиоуправление для крана F21-E1B имеет класс герметизации IP-65. Первая цифра означ…
МЕДЬ и МЕДНЫЙ ПРОКАТ
Марки меди и их химический состав определен в ГОСТ 859-2001. Сокращенная информация о марках меди приведена ниже (указано минимальное содержание меди и предельное содержание только двух примесей – кислорода и фосфора): Марка Медь О2 P Способ получения, основные примеси М00к 99.98 0.01 - Медные катоды:продукт электролитического рафинир…
Перевод крана на управление с пола
Перевод крана на управление с пола. При осуществлении перевода мостовых или козловых кранов, на дистанционное управление с пола могут быть применены кабельные пульты управления либо беспородные пульты управления грузоподъемными кранами. Полный перечень операций и систем контроля крановой кабины, должны соответствовать функционалу пульта, согласно РД 24.09…
При осуществлении перевода мостовых или козловых кранов, на дистанционное управление с пола могут быть применены кабельные пульты управления либо беспородные пульты управления грузоподъемными кранами. Полный перечень операций и систем контроля крановой кабины, должны соответствовать функционалу пульта, согласно РД 24.09…
Троллейный шинопровод HFP
Троллейный шинопровод HFP Описание — Контактно – защищенный троллейный шинопровод HFP H предназначен для внутренней и внешней установки. — Шинопроводы состоят из жесткого ПВХ корпуса и медных токопроводящих жил. Конструкция корпуса шинопровода и токосъемника исключают возможность перепутывания фаз. — Токосъемники выполнены в виде скользящей, холо…
Презентация завода Uting Telecontrol
Презентация завода Uting Telecontrol
Видео презентация завода радиотехнических изделий Uting Telecontrol. Один из крупнейших производителей промышленного радиоуправления, пультов для кранов и прочих грузоподъемных механизмов.
https://www.youtube.com/watch?v=hQiPE9z7E6Y…
Один из крупнейших производителей промышленного радиоуправления, пультов для кранов и прочих грузоподъемных механизмов.
https://www.youtube.com/watch?v=hQiPE9z7E6Y…
— ток полной нагрузки
В качестве «практических правил» номинальную мощность в амперах можно оценить как
- 115 вольт двигатель — однофазный: 14 ампер / л.
 с.
с. - 230 вольт двигатель — однофазный: 7 ампер / л.с.
- 230 вольт двигатель — 3 фазы: 2,5 ампер / л.с.
- 460 вольт двигатель — 3 фазы: 1,25 ампер / л.с.
Всегда проверьте информацию на паспортной табличке перед проектированием защитных устройств, проводки и коммутационного устройства.
Однофазные двигатели — л.с. и токи полной нагрузки
Ожидается, что двигатель данной номинальной мощности будет передавать это количество механической мощности на вал двигателя. Имейте в виду, что КПД двигателя не рассчитывается по приведенным ниже значениям для кВт и ампер. Необходимо учитывать КПД двигателя, чтобы избежать недостаточной мощности источника питания.
| Мощность | Ток полной нагрузки (А) | |||
|---|---|---|---|---|
| (л.с.) | (кВт) | 115 В | 208 В | 230 В |
| 1/6 | 0. | 4,4 | 2,4 | 2,2 |
| 1/4 | 0,19 | 5,8 | 3,2 | 2,9 |
| 1/3 | 0,25 | 7,2 | 4,0 | 3,6 |
| 1/2 | 0,38 | 9,8 | 5,4 | 4,9 |
| 3/4 | 0,56 | 13,8 | 7,6 | 6,9 |
| 1 | 0.75 | 16 | 8,8 | 8 |
| 1 1/2 | 1,1 | 20 | 11 | 10 |
| 2 | 1,5 | 24 | 13,2 | 12 |
| 3 | 2,3 | 34 | 18,7 | 17 |
| 5 | 3,8 | 56 | 30,8 | 28 |
Обратите внимание, что большинство электродвигателей рассчитано на работу с 50% до 100 % от номинальной нагрузки, а максимальная эффективность обычно составляет около 75% от номинальной нагрузки. Для двигателя мощностью 1 л.с. нагрузка обычно должна находиться в диапазоне от 1/2 до 1 л.с. с максимальной эффективностью 3/4 л.с.
Для двигателя мощностью 1 л.с. нагрузка обычно должна находиться в диапазоне от 1/2 до 1 л.с. с максимальной эффективностью 3/4 л.с.
Типичные диапазоны нагрузок:
- Допустимые для короткого периода: 20 — 120%
- Допустимые для работы: 50 — 100%
- Оптимальный КПД: 60 — 80%
Двигатель с сервисным фактором может быть случайным быть перегруженным. Перегрузка со временем снизит КПД двигателя.
Трехфазные двигатели — л. Коэффициент
 4
4 - 1 л.
 с. (в лошадиных силах на английском языке) = 745.7 Вт = 0,746 кВт = 550 фут-фунт / с = 2545 БТЕ / ч = 33,000 фут-фунт / м = 1,0139 метрическая мощность в лошадиных силах ~ = 1,0 кВА
с. (в лошадиных силах на английском языке) = 745.7 Вт = 0,746 кВт = 550 фут-фунт / с = 2545 БТЕ / ч = 33,000 фут-фунт / м = 1,0139 метрическая мощность в лошадиных силах ~ = 1,0 кВА
Двигатели постоянного тока — мощность и токи полной нагрузки
| Мощность | Постоянный ток (А) | ||
|---|---|---|---|
| (л.с.) | (кВт) | 230 В | 440 В |
| 1/4 | 0,19 | 0,81 | 0.42 |
| 1/3 | 0,25 | 1,1 | 0,56 |
| 1/2 | 0,37 | 1,6 | 0,85 |
| 3/4 | 0,56 | 2,4 | 1,3 |
| 1 | 0,75 | 3,2 | 1,7 |
| 1 1/2 | 1,1 | 4,9 | 2,5 |
| 2 | 1,5 | 6. 5 5 | 3,4 |
| 3 | 2,2 | 9,7 | 5,1 |
| 5 | 3,7 | 16 | 8,5 |
| 7 1/2 | 5,6 | 24 | 13 |
| 10 | 7,5 | 32 | 17 |
| 15 | 11 | 49 | 25 |
| 20 | 15 | 65 | 34 |
| 30 | 22 | 97 | 51 |
| 50 | 37 | 162 | 85 |
| 75 | 56 | 243 | 127 |
| 100 | 75 | 324 | 170 |
- для 115 В — ток в два раза больше, чем для 230 В
Диаграммы тока двигателя | R&M Electrical Group
Диаграммы тока двигателей | R&M Electrical Group
ЛУЧШЕ • УМНЕЕ • БЕЗОПАСНЕЕ
Технические ресурсы
Мы собрали ряд технических ресурсов для использования в качестве справочника в электрических проектах.
Загрузить в формате PDF
Таблицы выбора — трехфазные двигатели
Асинхронные двигатели — таблицы токов при полной нагрузке (примерно 1450 об / мин)
(приведены в качестве руководства для выбора подходящего механизма управления MEM). Таблицы основаны на двигателях со средней эффективностью и коэффициентом мощности примерно 1450 об / мин. Двигатели с более высокой скоростью обычно потребляют меньший ток, чем указано в таблице; в то время как двигатели с меньшей скоростью обычно потребляют более высокий ток. Эти цифры могут сильно отличаться, особенно для однофазных двигателей, и инженеры должны, когда это возможно, определять фактическое f.l.c из паспортной таблички двигателя в каждом случае.
Однофазные двигатели
| НОМИНАЛ ДВИГАТЕЛЯ | HP | ПРИМ. F.L.C. НАПРЯЖЕНИЕ НА ЛИНИИ | ||
|---|---|---|---|---|
| 110 В переменного тока | 220 В переменного тока | 240 В переменного тока | ||
| 0,07 кВт | 1/12 | 2,4 | 1,2 | 1,1 |
| 0,1 кВт | 1/8 | 3,3 | 1.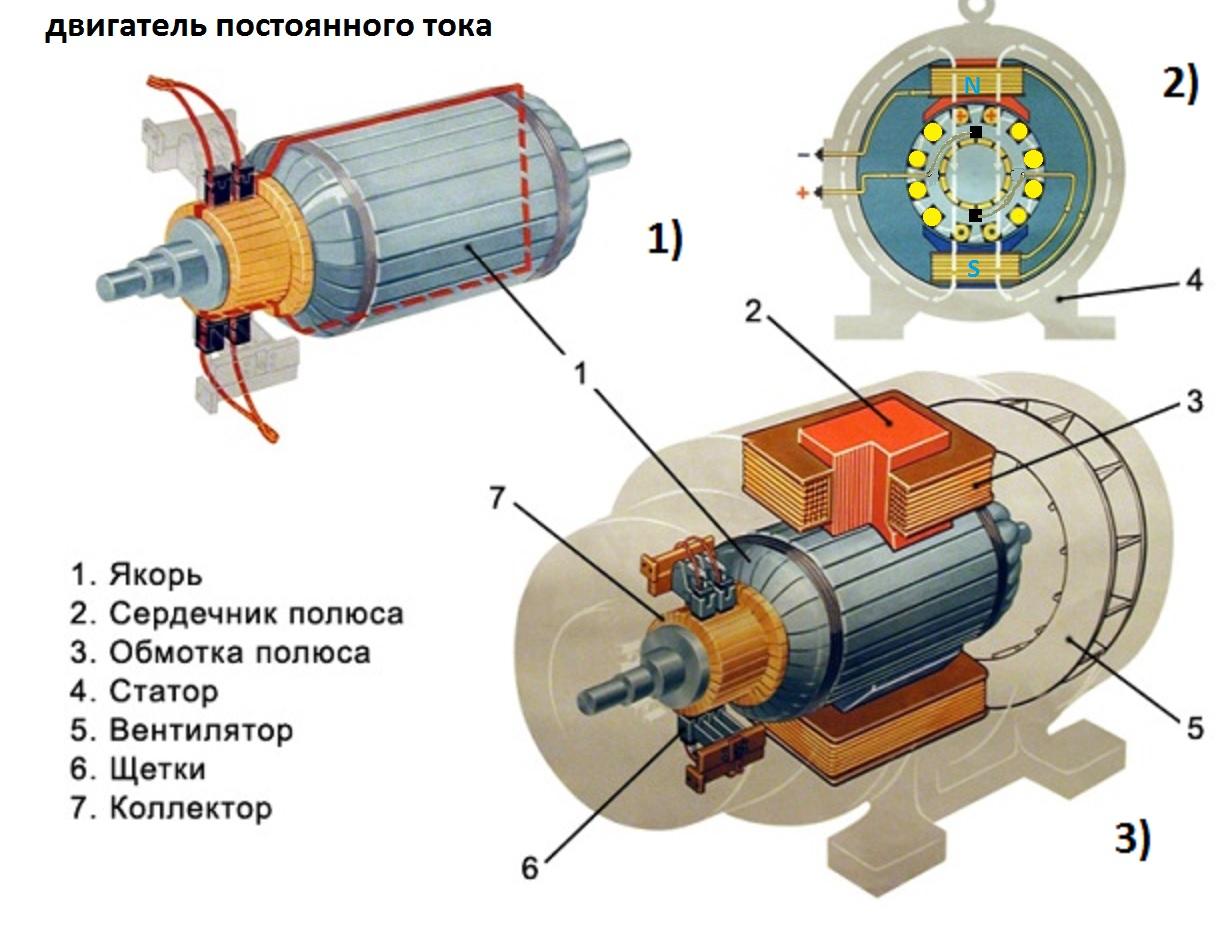 6 6 | 1,5 |
| 0,12 кВт | 1/6 | 3,8 | 1,9 | 1,7 |
| 0,18 кВт | 1/4 | 4,5 | 2,3 | 2,1 |
| 0,25 кВт | 1/3 | 5,8 | 2,9 | 2,6 |
| 0,37 кВт | 1/2 | 7,9 | 3,9 | 3,6 |
| 0,56 кВт | 3/4 | 11 | 5.5 | 5 |
| 0,75 кВт | 1 | 15 | 7,3 | 6,7 |
| 1,1 кВт | 1,5 | 21 | 10 | 9 |
| 1,5 кВт | 2 | 26 | 13 | 12 |
| 2,2 кВт | 3 | 37 | 19 | 17 |
| 3 кВт | 4 | 49 | 24 | 22 |
| 3.7 кВт | 5 | 54 | 27 | 25 |
| 4 кВт | 5,5 | 60 | 30 | 27 |
| 5,5 кВт | 7,5 | 85 | 41 | 38 |
| 7,5 кВт | 10 | 110 | 55 | 50 |
Трехфазные двигатели
| НОМИНАЛ ДВИГАТЕЛЯ | HP | ПРИМ. F.L.C. НАПРЯЖЕНИЕ НА ЛИНИИ F.L.C. НАПРЯЖЕНИЕ НА ЛИНИИ | ||||
|---|---|---|---|---|---|---|
| 220 В переменного тока | 240 В переменного тока | 380 В переменного тока | 415 В переменного тока | 550 В переменного тока | ||
| 0,1 кВт | 1/8 | 0,7 | 0,6 | 0,4 | 0,4 | 0,3 |
| 0,12 кВт | 1/6 | 1 | 0,9 | 0,5 | 0,5 | 0,3 |
| 0,18 кВт | 1/4 | 1.3 | 1,2 | 0,8 | 0,7 | 0,4 |
| 0,25 кВт | 1/3 | 1,6 | 1,5 | 0,9 | 0,9 | 0,6 |
| 0,37 кВт | 1/2 | 2,5 | 2,3 | 1,4 | 1,3 | 0,8 |
| 0,56 кВт | 3/4 | 3,1 | 2,8 | 1,8 | 1,6 | 1,1 |
0. 75 кВт 75 кВт | 1 | 3,5 | 3,2 | 2 | 1,8 | 1,4 |
| 1,1 кВт | 1,5 | 5 | 4,5 | 2,8 | 2,6 | 1,9 |
| 1,5 кВт | 2 | 6,4 | 5,8 | 3,7 | 3,4 | 2,6 |
| 2,2 кВт | 3 | 9,5 | 8,7 | 5,5 | 5 | 3.5 |
| 3,0 кВт | 4 | 12 | 11 | 7 | 6,5 | 4,7 |
| 3,7 кВт | 5 | 15 | 13 | 8 | 8 | 6 |
| 4,0 кВт | 5,5 | 16 | 14 | 9 | 8 | 6 |
| 5,5 кВт | 7,5 | 20 | 19 | 12 | 11 | 8 |
| 7.5 кВт | 10 | 27 | 25 | 16 | 15 | 11 |
| 9,3 кВт | 12,5 | 34 | 32 | 20 | 18 | 14 |
| 10 кВт | 13,5 | 37 | 34 | 22 | 20 | 15 |
| 11 кВт | 15 | 41 | 37 | 23 | 22 | 16 |
| 15 кВт | 20 | 64 | 50 | 31 | 28 | 21 |
| 18 кВт | 25 | 67 | 62 | 39 | 36 | 26 |
| 22 кВт | 30 | 74 | 70 | 43 | 39 | 30 |
| 30 кВт | 40 | 99 | 91 | 57 | 52 | 41 |
| 37 кВт | 50 | 130 | 119 | 75 | 69 | 50 |
| 45 кВт | 60 | 147 | 136 | 86 | 79 | 59 |
| 55 кВт | 75 | 183 | 166 | 105 | 96 | 72 |
| 75 кВт | 100 | 239 | 219 | 138 | 125 | 95 |
| 90 кВт | 125 | 301 | 269 | 170 | 156 | 117 |
| 110 кВт | 150 | 350 | 325 | 205 | 189 | 142 |
| 130 кВт | 175 | 410 | 389 | 245 | 224 | 169 |
| 150 кВт | 200 | 505 | 440 | 278 | 255 | 192 |
Загрузить в формате PDF
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ: Информация на этой странице и в PDF-файле предназначена только для информации, и R&M Electrical Group Ltd не несет ответственности за любую содержащуюся там информацию.
Зависимость входного тока от тока двигателя, преобразование мощности — maxon Support
Тема:
Иногда обсуждают, почему ток двигателя, сообщаемый контроллером двигателя, сильно отличается от тока, сообщаемого источником питания. Это кажется удивительным для многих пользователей, особенно потому, что ток двигателя часто намного превышает входной ток контроллера двигателя.
В чем секрет этого и какое текущее значение правильное?
Решение:
Силовой каскад контроллера мотора похож на силовой преобразователь или своего рода электронный трансформатор. Это означает, что вы должны сравнить входную мощность (= «Напряжение питания» x «Входной ток»), подаваемую источником питания , с выходной мощностью (= «Напряжение двигателя» x «Ток двигателя»), подаваемой на двигатель от силового каскада контроллера мотора. Если вы просто сравниваете «Входной ток» и «Ток двигателя», это вводит в заблуждение и не имеет никакого значения.
Силовой каскад современных контроллеров двигателей (таких как Maxon ESCON, EPOS или MAXPOS) основан на так называемом ШИМ (широтно-импульсной модуляции), управляемом напряжением двигателя.Напряжение двигателя включается и выключается с высокой частотой (обычно 50–100 кГц) логикой контроллера двигателя. Время включения (= так называемый «рабочий цикл ШИМ») в каждом цикле ШИМ (0,01 мс в случае 100 кГц) определяет фактический текущий уровень напряжения двигателя. Результирующее напряжение двигателя может варьироваться от 0 В до почти напряжения питания в обоих направлениях. Напряжение двигателя (или рабочий цикл ШИМ) регулируется в каждом текущем цикле управления (обычно 0,1 — 0,01 мс) контроллера мотора в зависимости от текущей требуемой рабочей точки (т.е.е. скорость и крутящий момент) двигателя. На основе уравнения мощности это означает, что ток двигателя может (и обычно будет) намного выше, чем входной ток контроллера двигателя. Причина этого в том, что постоянно адаптированное к ШИМ напряжение двигателя (в зависимости от скорости и крутящего момента) ниже фиксированного напряжения питания (батареи или источника питания).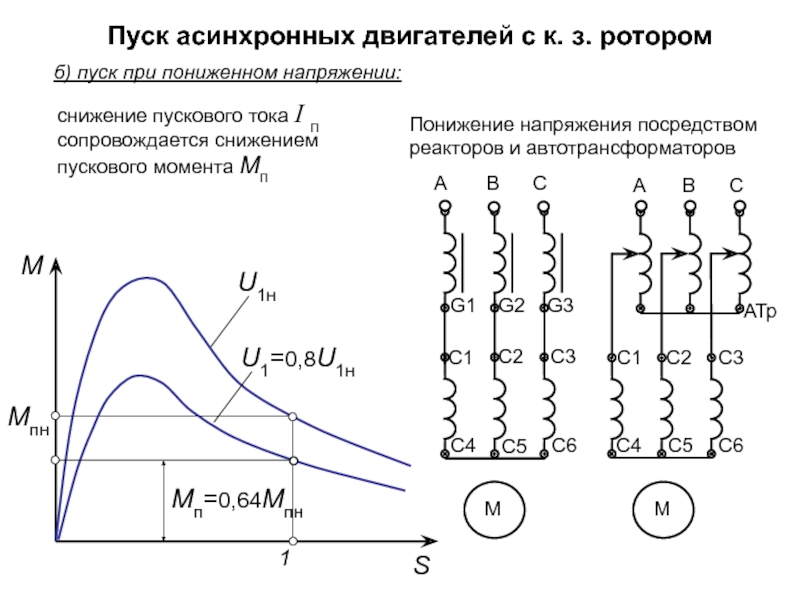
Формула преобразования мощности:
Схема системы:
Измерение мощности двигателя с помощью EPOS4 или IDX:
Пожалуйста, проверьте следующий документ Центра поддержки, чтобы найти информацию о том, как все соответствующие данные (напряжение питания, ток двигателя, рабочий цикл ШИМ) могут быть доступны объектам EPOS4 или IDX и как на основе этого можно рассчитать электрическую мощность двигателя:
-> EPOS4 / IDX: Расчет мощности электродвигателя
Заключение / Вывод:
- «Входной ток» контроллера мотора (= выходной ток источника питания или батареи) НЕ (!!) равен «Току мотора»!
- Входной ток контроллера мотора, сообщаемый источником питания, правильный.
- Ток двигателя, измеренный и переданный контроллером двигателя, правильный.
- Невозможно напрямую сравнить эти два значения тока
, потому что напряжение питания и напряжение двигателя различаются!
- Уравнение мощности рассчитывает: P Электродвигатель = P Вход — P Электроника
- Напряжение двигателя всегда ниже, чем напряжение питания.
- Напряжение двигателя постоянно изменяется с высокой частотой
и зависит от скорости и противо-ЭДС двигателя. - Ток двигателя обычно намного выше, чем ток, обеспечиваемый источником питания или аккумулятором.
- Напряжение двигателя всегда ниже, чем напряжение питания.
Дополнительная информация:
- Обратите внимание на прикрепленный PDF-файл, содержащий эту информацию, отформатированный для распечатки.
- Ссылки на статьи:
Номинальный ток двигателя, v / с Ток полной нагрузки, v / s Номинальный ток
Термины «номинальный ток двигателя », «ток полной нагрузки» и «номинальный ток », скорее всего, запутают инженеров-электриков.Хотя эти термины очень похожи, они немного отличаются друг от друга. Вот четкое определение каждого из них.
Определения
Номинальный ток двигателя
Ток, потребляемый двигателем при полной нагрузке, вычисленный по формуле, называется номинальным током. Обмотки двигателя рассчитаны на то, чтобы выдерживать номинальный ток во время нормальной работы и немного выше его в течение более короткого периода времени.
Обмотки двигателя рассчитаны на то, чтобы выдерживать номинальный ток во время нормальной работы и немного выше его в течение более короткого периода времени.
Попробуйте: Простой калькулятор номинального тока двигателя с этапами расчета
Ток полной нагрузки двигателя
Ток полной нагрузки двигателя — это ток, потребляемый им при работе с полной нагрузкой и номинальным напряжением.Это измеренное значение, которое также можно рассчитать по формулам. Ток полной нагрузки может изменяться в зависимости от приложенного напряжения. Кроме того, номинальный ток при полной нагрузке (FLC) — это значение, указанное производителем при испытаниях в идеальных условиях.
См. : Асинхронные двигатели — таблицы токов полной нагрузки
Номинальный ток
Номинальный ток такой же, как и номинальный ток. Это ток, потребляемый двигателем при номинальной механической мощности на валу.
Расчет
Формулы для номинального тока, тока полной нагрузки и номинального тока одинаковы:
Для однофазных двигателей переменного тока
Для однофазных двигателей, когда известна мощность в кВт:
Для однофазных двигателей, если известна мощность:
Для трехфазных двигателей переменного тока
Для трехфазных двигателей, когда известна мощность в кВт:
Для трехфазных двигателей, если известно л.с.:
Где,
- Напряжение: Междуфазное напряжение для трехфазного источника питания.
- Рейтинг: Номинальная мощность двигателя в кВт.
- Коэффициент мощности (cosΦ) : Номинальный коэффициент мощности двигателя.
- КПД (η) : КПД двигателя.
Klockner Moeller — Преобразование из л. С. В усилитель
Klockner Moeller — Конверсия HP в Амперы
Типовая диаграмма тока двигателя при полной нагрузке для трехфазных двигателей переменного тока |
|||
|
|||
| л.с. | 208 Вольт | 230 Вольт | 460 Вольт |
| 1/2 | 2.4 | 2,2 | 1,1 |
| 3/4 | 3,5 | 3,2 | 1,6 |
| 1 | 4,6 | 4,2 | 2,1 |
| 1 1/2 | 6,6 | 6. 0 0 |
3,0 |
| 2 | 7.5 | 6,8 | 3,4 |
| 3 | 10,6 | 9,6 | 4,8 |
| 5 | 16,7 | 15,2 | 7,6 |
| 7 1/2 | 24,2 | 22 | 11 |
| 10 | 30.8 | 28 | 14 |
| 15 | 46,2 | 42 | 21 |
| 20 | 59,4 | 54 | 27 |
| 25 | 74,8 | 68 | 34 |
| 30 | 88 | 80 | 40 |
| 40 | 114 | 104 | 52 |
| 50 | 143 | 130 | 65 |
| 60 | 169 | 154 | 77 |
| 75 | 211 | 192 | 96 |
| 100 | 273 | 248 | 124 |
| 125 | 343 | 312 | 156 |
| 150 | 396 | 360 | 180 |
| 200 | 528 | 480 | 240 |
| 250 | – | – | 302 |
| 300 | — | — | 361 |
| 350 | – | – | 414 |
| 400 | — | — | 477 |
| 450 | – | – | 515 |
| 500 | — | — | 590 |
|
Для коэффициента мощности 90 и 80 процентов указанные выше
цифры умножаются на 1. |
|||
 1 и 1,25 соответственно.
1 и 1,25 соответственно. Позвольте нашим опытным сотрудникам по продажам помочь вам в выборе продуктов, соответствующих вашим потребностям. ЗВОНИТЕ 866-595-9616.
© 2016 KMParts.com, Inc. Все права защищены.
Учебное пособие по электродвигателям постоянного тока— Расчеты электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для двигателей постоянного тока без сердечника с щеткой
При выборе двигателя постоянного тока без сердечника с щеткой для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания безопасной, хорошо функционирующей и достаточно мощной прецизионной приводной системы.В этом документе мы представили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
являются преобразователями, поскольку они преобразуют электрическую энергию ( P в ) в механическую энергию ( P из ). Частное обоих членов соответствует КПД двигателя.Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника пренебрежимо малы). Есть дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы. Стандартная метрическая единица измерения мощности — «ватт» Вт. Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) .Поскольку скорость — это расстояние во времени, уравнение принимает вид P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность, Вт
M = Крутящий момент в Нм
F = Сила, Н
d = Расстояние в м
t = Время в с
ω рад = Угловая скорость в рад / с
Символ, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
В европейской номенклатуречасто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При вычислении мощности, если « n » (скорость) находится в мин. -1 , то вы должны преобразовать его в угловую скорость в единицах рад / с . Это достигается путем умножения скорости на коэффициент преобразования единиц 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Это достигается путем умножения скорости на коэффициент преобразования единиц 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = Скорость, мин -1
M = Крутящий момент в мНм
Предположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать при работе в холодном состоянии с крутящим моментом 68 мНм при скорости 7 370 мин. -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно изучить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.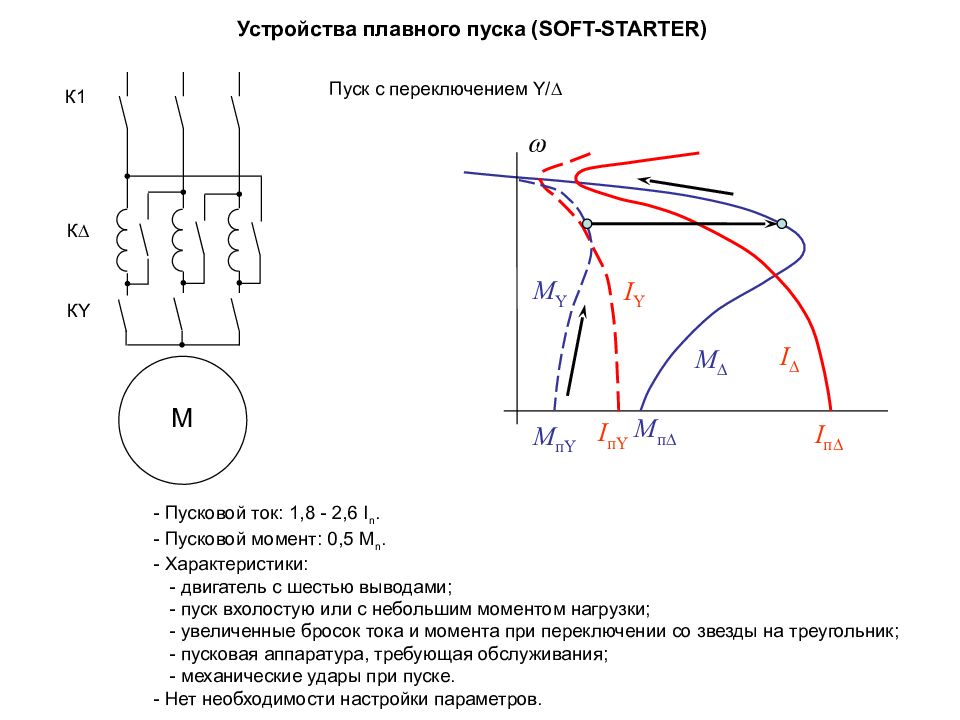
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из широко используемых методов графического построения характеристик двигателя является использование кривых крутящий момент-скорость. Хотя использование кривых крутящий момент-скорость гораздо более распространено в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графиков скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента-скорости, но это не единственный метод.
Если контроллер с функцией записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник напряжения, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Используя источник напряжения, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент двигателя точно до точки.
где происходит срыв. При остановке измерьте крутящий момент от
тормоз и ток двигателя. Ради этого
обсуждение, предположим, что муфта не добавляет нагрузки к
двигатель и что нагрузка от тормоза не
включают неизвестные фрикционные компоненты. Это также полезно
в этот момент, чтобы измерить оконечное сопротивление
мотор.Измерьте сопротивление, соприкоснувшись с двигателем.
клеммы с омметром. Затем раскрутите вал двигателя.
и сделайте еще одно измерение. Измерения
должны быть очень близки по стоимости. Продолжайте крутить вал
и сделайте не менее трех измерений. Это обеспечит
что измерения не проводились в точке
минимальный контакт на коммутаторе.
Затем раскрутите вал двигателя.
и сделайте еще одно измерение. Измерения
должны быть очень близки по стоимости. Продолжайте крутить вал
и сделайте не менее трех измерений. Это обеспечит
что измерения не проводились в точке
минимальный контакт на коммутаторе.
Теперь мы измерили:
n 0 = скорость холостого хода
I 0 = ток холостого хода
M H = крутящий момент при остановке
R = оконечное сопротивление
Шаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величиной этому наклону является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = постоянная тока
k M = постоянная момента
Для целей данного обсуждения предполагается, что двигатель не имеет внутреннего трения.На практике момент трения двигателя M R определяется умножением постоянной крутящего момента k M двигателя на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинается не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = Момент трения
Шаг 3: Построение графика Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и эффективности от крутящего момента. Вторая вертикальная ось обычно используется для оценки эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения КПД в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут нанесены на тот же график, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Поскольку выходная механическая мощность — это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии для зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR показана в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и построены графики тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.И снова примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость по сравнению с крутящим моментом ( n по сравнению с M )
- Красный = ток по сравнению с крутящим моментом ( I по сравнению с M )
- Зеленый = эффективность по сравнению с крутящим моментом ( η или . M )
- Коричневый = мощность в зависимости от крутящего момента ( P vs. М )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления в медных обмотках и ослабления. выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую мощность в механическую.
Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке. Знаменатель известен как потеря резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная крутящего момента).Обратите внимание, что индекс константы двигателя — это строчная буква « m », в то время как индекс постоянной крутящего момента использует прописную букву « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые управляют поведением двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа для напряжения гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.Применительно к двигателю постоянного тока, последовательно соединенному с источником питания постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно по величине сумме падений напряжения на сопротивлении обмоток. и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Обратная ЭДС в В
Обратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности — это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателя
Следовательно, путем подстановки:
Постоянная противо-ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».
(Правило напряжения Кирхгофа)
Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно указанные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности — это постоянная крутящего момента двигателя.
Где:
M m = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателя
Подставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый на роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = Момент трения двигателя
M L = Момент нагрузки
Предполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки.Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по формуле:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Тормозной момент
n 0 = Скорость холостого хода
Альтернативный подход к получению этого значение — найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак, это подразумевается что результат приведет к уменьшению (отрицательному) склон.
Пример расчета теоретического двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать с напряжением 24 В на клеммах двигателя и крутящим моментом 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.рт. (Вт).
Скорость двигателя под нагрузкой — это просто скорость холостого хода за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя — это крутизна зависимости крутящего момента от крутящего момента.кривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при остановке. В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
Теперь через замену:
В этом случае скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой складывается из тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности тока и крутящего момента нагрузки — это постоянная крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
.Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток будет примерно:
.Выходная механическая мощность двигателя — это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (при необходимости). Следовательно, выходная мощность двигателя будет примерно:
.Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Поскольку КПД η — это просто выходная мощность, деленная на входную мощность, давайте вычислим ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
Ток I , протекающий через сопротивление R , приводит к потере мощности в виде тепла I 2 · R .В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря представляет собой потерю мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности через компоненты двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется теплопередаче по определенному пути. Производители двигателей обычно указывают способность двигателя рассеивать тепло, предоставляя значения теплового сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше. В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.).). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Общие потери I 2 · R в катушке (источнике тепла) умножаются на тепловые сопротивления для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление корпуса к окружающей среде в к / Вт
Продолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой — 8 к / Вт.Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предполагается, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, требуется запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)
Таким образом, из-за нагрева катушки и магнита из-за рассеяния мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом.Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)
Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и постоянная противо-ЭДС — все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров в результате более горячей катушки и магнита, но наилучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа. По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление R th3 корпуса относительно окружающей среды может быть значительно уменьшено за счет добавления радиаторов.Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Поэтому обычно наблюдается некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительной информации о расчетах бесщеточного двигателя постоянного тока и о том, как на характеристики электродвигателя может влиять тепловая мощность, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
Общие сведения о пусковых (пусковых) токах двигателя и статья 430.52 NEC — Jade Learning
Общие сведения о пусковых (пусковых) токах двигателя и статья NEC 430.52
Автор: Стэн Тюркель | 05 марта 2019 г.
Пусковой ток, также называемый «током заторможенного ротора», — это чрезмерный ток, протекающий в двигателе и его проводниках в течение первых нескольких моментов после подачи питания (включения) двигателя.Это потребление тока иногда называют «током заторможенного ротора», потому что ток, необходимый при запуске для начала вращения невращающегося, обесточенного вала двигателя, очень похож на чрезмерное потребление тока, возникающее в моменты, когда двигатель перегружен до заедания. В обоих случаях потребление тока таково, что требуется, когда двигатель пытается преодолеть холостой вал двигателя.
Устройства перегрузки по току, защищающие двигатель и его схемы, должны выдерживать этот кратковременный , но очень сильный скачок тока , при этом обеспечивая соответствующую защиту от короткого замыкания на землю и условий перегрузки двигателя.
Это отличное место для прогулки.
Пусковой ток двигателя является необходимым условием перегрузки
Итак, что такое пусковой ток двигателя? При первом включении двигателя переменного тока в цепи питания двигателя потребляется чрезмерный ток, намного превышающий уровни тока, указанные на паспортной табличке двигателя. Высокое сопротивление часто встречается при запуске двигателя из статического (холостого) положения, и для начала вращения вала двигателя необходимо чрезмерное потребление тока.
Часто во время начального полупериода протекания электрического тока при запуске двигателя (Примечание: полупериод в электрической системе с частотой 60 Гц равен 1/120 секунды времени) пусковые токи достигают уровней, в 20 раз превышающих чем нормальные уровни тока, возникающие при нормальной рабочей скорости двигателя. После этого начального скачка тока двигатель начинает вращаться. В этот момент начальный пусковой ток ослабевает, снижаясь до уровня, равного 4-8-кратному нормальному рабочему току для этого двигателя.Этот пониженный, но все же в значительной степени преувеличенный ток поддерживается только на короткое время, поскольку двигатель быстро достигает полной скорости вращения, после чего ток снижается до нормального рабочего уровня.
Пусковой ток и компоненты двигателя
При рассмотрении пускового тока помогает понять, что происходит внутри асинхронного двигателя переменного тока, когда мы впервые включаем его. Мы знаем, что обмотки статора получают питание сразу после включения. Переменный ток (AC), подаваемый на эту обмотку, создает переменное магнитное поле, а затем индуцирует это поле в роторе.
Разница в магнитных полях между обмоткой статора (неподвижная группа медных обмоток в двигателе) и обмоткой ротора (обмотка вращающегося вала) является самым большим фактором начального пускового тока, возникающего при запуске. Как только ротор начинает вращаться, а затем догоняет магнитное поле статора, разница между двумя полями уменьшается, и пусковой ток падает пропорционально.
Конечно, мы знаем, что стандартный асинхронный двигатель переменного тока всегда испытывает скольжение или градусов; два магнитных поля никогда не синхронизируются полностью, так как ротор всегда в некоторой степени отстает от поля обмотки статора.Это «скольжение» двигателя определено как процентов от скольжения , а конечный крутящий момент, передаваемый валом двигателя, является результатом магнитной силы, наведенной на вал двигателя, за вычетом этого скольжения.
Защита цепей двигателя
Национальный электротехнический кодекс требует нескольких уровней защиты при установке систем управления двигателями. Эта защита необходима для фидерной цепи двигателя (защита от короткого замыкания и замыкания на землю ), ответвленной цепи двигателя (защита от короткого замыкания и замыкания на землю ), а также защиты двигателя от перегрузки, при которой ток проходит через двигатель измеряется на каждой отдельной фазе цепи, питающей двигатель в сборе.
Понимание потенциала пускового тока двигателя (пускового тока), в дополнение к номинальному напряжению двигателя, указанному на паспортной табличке, номинальной мощности (л.с.) и номинальному току при полной нагрузке (FLA) в сочетании с NEC дает нам информация, необходимая для правильного определения защиты от перегрузки по току / перегрузки для этого двигателя.
Хотя мы хотим, чтобы OCPD (устройство защиты от перегрузки по току), , будь то автоматический выключатель или предохранитель , обеспечивал максимальную защиту от короткого замыкания и перегрузки, нам также необходимо игнорировать эти защитные устройства, для короткого замыкания. период времени, — неизбежный пусковой ток, который будет возникать при запуске двигателя.
Автоматические выключатели с обратнозависимой выдержкой времени и плавкие предохранители с выдержкой времени, предоставленные для использования с разрешения, указанного в 430.52 NEC, обеспечивают защиту от короткого замыкания на землю в сочетании с защитой от перегрузки «вслепую» . И автоматический выключатель с обратнозависимой выдержкой времени, и плавкий предохранитель с выдержкой времени предназначены для выдерживания этих мощных пусковых токов в течение нескольких сотых секунды, необходимых для преодоления первоначального запуска двигателя. Выключатели с обратнозависимой выдержкой времени достигают этого за счет использования атрибута, называемого «кривая срабатывания», который, по существу, позволяет чрезмерному, преувеличенному току оставаться на выключателе до полсекунды или дольше, при этом выполняя мгновенное отключение контактов выключателя при обнаруживается прямое замыкание на землю.
Увеличение допустимой нагрузки предохранителя или автоматического выключателя в диапазоне от 225% до 400% от номинального значения цепи, указанное в таблице 430.52, мало помогает противостоять вышеупомянутому пусковому току. Однако , это разрешенное увеличение размера устройства максимального тока (выключателя или предохранителя), действительно поддерживает цепь в течение нескольких секунд сразу после этого начального пускового тока, поскольку ток спадает и снижается до нормального рабочего тока.
Встроенные свойства задержки, обнаруженные в этих двух типах устройств максимального тока, в сочетании с увеличением размера, которое разрешено для этих же устройств (разрешено в T430.52), позволяют ответвленной цепи двигателя выдерживать кратковременные бомбардировка сильными пусковыми токами, возникающими при запуске двигателя.
Следующее руководство поможет вам сделать правильный выбор для защиты CB.
Для стандартной защиты от короткого замыкания с использованием автоматического выключателя с обратнозависимой выдержкой времени используется следующее:
- Используйте таблицы 430.247–430.250 для определения FLC двигателя. (Обратите внимание, что мы не используем информацию с паспортной таблички двигателя).
- Из таблицы 430.52 находим правильное максимальное значение уставки для стандартной защиты от короткого замыкания
- Умножаем FLC двигателя на значение в таблице 430.52
- Мы округляем ближайший доступный стандартный рейтинг, указанный в Таблице 240.6 (A).
В разделе Кодекса 430.52 (C) (1) (c) мы находим исключение из разрешений, предоставленных для определения номинала автоматического выключателя с обратнозависимой выдержкой времени, которые указаны в Таблице 430.52. Мы читаем: Если номинал автоматического выключателя, определенный T430.52, недостаточен для пускового тока (пускового тока), испытываемого двигателем, электрик может увеличить номинал автоматического выключателя еще больше, до максимум 400% для нагрузок, которые не превышают 100 ампер. И максимум до 300% для нагрузок, которые на больше , чем 100 ампер.
