Что такое ULN2003A и как он используется в робототехнике. Каковы основные характеристики и преимущества этого драйвера шаговых двигателей. Как правильно подключить и настроить ULN2003A для управления шаговыми двигателями. Какие проекты можно реализовать с помощью этого драйвера.
Что представляет собой драйвер ULN2003A и его ключевые особенности
ULN2003A — это интегральная микросхема, представляющая собой массив из 7 высоковольтных и высокотоковых транзисторных ключей Дарлингтона. Данный чип широко применяется в качестве драйвера для управления шаговыми двигателями в робототехнике и других областях.
Основные характеристики ULN2003A:
- Максимальное напряжение коллектор-эмиттер: 50В
- Максимальный выходной ток на канал: 500 мА
- Пиковый выходной ток (импульсный): 600 мА
- Встроенные защитные диоды для работы с индуктивными нагрузками
- Совместимость с различными типами логики (ТТЛ, КМОП и др.)
- Корпус DIP-16 или SOIC-16
Каковы преимущества использования ULN2003A для управления шаговыми двигателями? Этот драйвер обладает рядом важных достоинств:

- Простота применения и подключения
- Низкая стоимость
- Высокая надежность
- Возможность управления нагрузками с большим током потребления
- Встроенная защита от обратного выброса ЭДС индуктивной нагрузки
Принцип работы ULN2003A при управлении шаговым двигателем
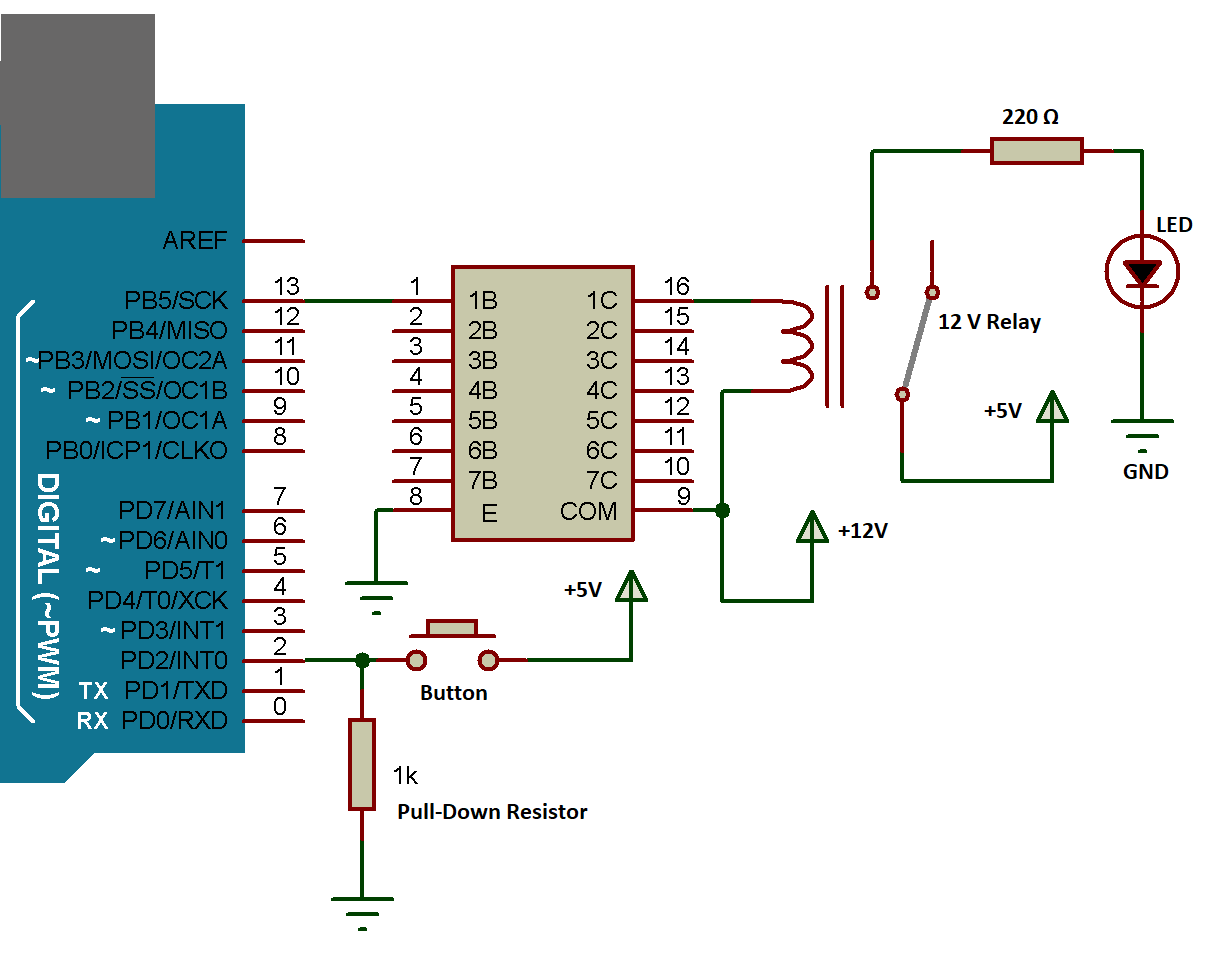
Как работает ULN2003A при управлении шаговым двигателем? Принцип действия основан на последовательном включении обмоток двигателя в определенном порядке. Каждый выход микросхемы подключается к соответствующей обмотке двигателя. При подаче управляющих сигналов на входы ULN2003A происходит поочередное включение выходных каскадов, что приводит к вращению ротора двигателя на заданный угол.
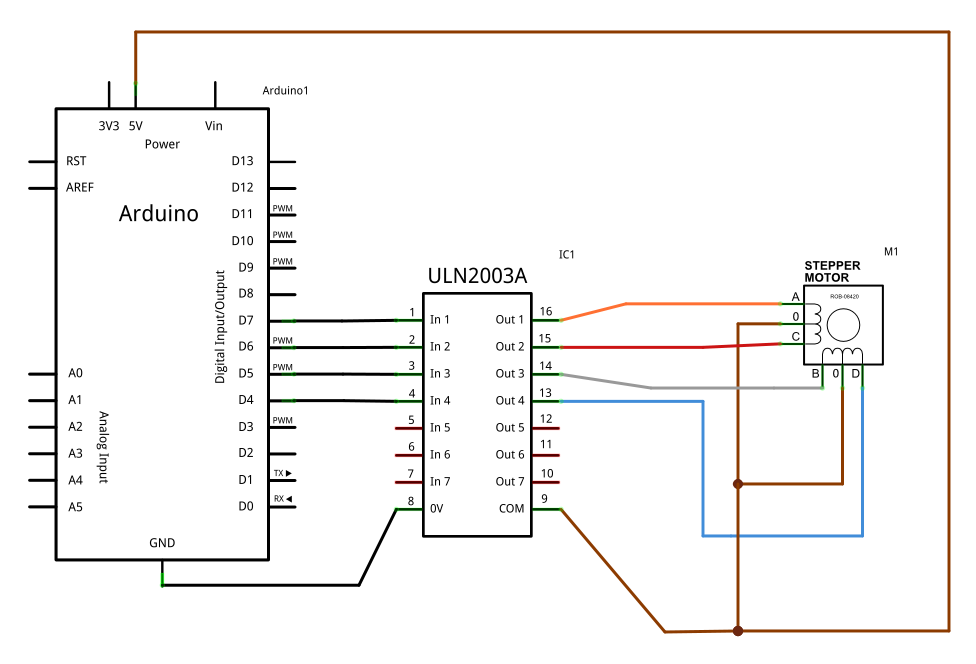
Для корректной работы схемы необходимо обеспечить правильную последовательность управляющих импульсов. Это может быть реализовано с помощью микроконтроллера или специализированного контроллера шагового двигателя. Типовая схема подключения выглядит следующим образом:
- Входы ULN2003A подключаются к портам микроконтроллера
- Выходы соединяются с обмотками шагового двигателя
- Положительный вывод питания двигателя подключается к отдельному источнику
- Общий провод соединяется с землей схемы
Подключение и настройка ULN2003A для управления шаговым двигателем
Как правильно подключить и настроить ULN2003A для работы с шаговым двигателем? Рассмотрим пошаговую инструкцию:

- Определите тип и характеристики вашего шагового двигателя (биполярный/униполярный, рабочее напряжение, ток обмоток)
- Подключите обмотки двигателя к выходам ULN2003A согласно документации
- Соедините входы драйвера с портами микроконтроллера
- Подключите питание двигателя к отдельному источнику напряжения
- Настройте программное обеспечение для генерации правильной последовательности управляющих сигналов
При подключении важно учитывать следующие моменты:
- Убедитесь, что напряжение питания двигателя не превышает максимально допустимое для ULN2003A
- Используйте развязывающие конденсаторы для уменьшения помех
- При необходимости установите радиаторы для отвода тепла
- Проверьте правильность подключения всех выводов перед подачей питания
Программирование микроконтроллера для работы с ULN2003A
Как запрограммировать микроконтроллер для управления шаговым двигателем через ULN2003A? Рассмотрим базовый алгоритм на примере Arduino:
- Определите выводы для подключения к ULN2003A
- Настройте эти выводы как выходы в функции setup()
- Создайте массив с последовательностью шагов
- В основном цикле программы реализуйте функцию для выполнения одного шага
- Добавьте управление скоростью и направлением вращения
Пример простого кода для управления униполярным шаговым двигателем:
 «`cpp
const int stepPins[] = {2, 3, 4, 5}; // Пины для подключения к ULN2003A
const int stepsPerRevolution = 2048; // Шагов на оборот для 28BYJ-48
void setup() {
for (int i = 0; i < 4; i++) {
pinMode(stepPins[i], OUTPUT);
}
}
void loop() {
for (int i = 0; i < stepsPerRevolution; i++) {
oneStep();
delay(2); // Задержка для управления скоростью
}
delay(1000); // Пауза между оборотами
}
void oneStep() {
static int step = 0;
digitalWrite(stepPins[step], HIGH);
digitalWrite(stepPins[(step + 3) % 4], LOW);
step = (step + 1) % 4;
}
```
«`cpp
const int stepPins[] = {2, 3, 4, 5}; // Пины для подключения к ULN2003A
const int stepsPerRevolution = 2048; // Шагов на оборот для 28BYJ-48
void setup() {
for (int i = 0; i < 4; i++) {
pinMode(stepPins[i], OUTPUT);
}
}
void loop() {
for (int i = 0; i < stepsPerRevolution; i++) {
oneStep();
delay(2); // Задержка для управления скоростью
}
delay(1000); // Пауза между оборотами
}
void oneStep() {
static int step = 0;
digitalWrite(stepPins[step], HIGH);
digitalWrite(stepPins[(step + 3) % 4], LOW);
step = (step + 1) % 4;
}
```
Применение ULN2003A в робототехнических проектах
Где можно использовать ULN2003A в робототехнике? Этот драйвер находит широкое применение в различных проектах, связанных с точным позиционированием и управлением движением. Вот несколько примеров:
- Роботы-манипуляторы для точного перемещения объектов
- Системы автоматизации для управления клапанами и задвижками
- Робототехнические платформы с колесным или гусеничным приводом
- Устройства для автоматической фокусировки в оптических системах
Какие преимущества дает использование ULN2003A в этих проектах? Драйвер обеспечивает:

- Точное позиционирование с высоким разрешением
- Возможность управления скоростью и направлением вращения
- Простоту интеграции с микроконтроллерными системами
- Надежность работы благодаря встроенной защите
- Экономичность решения по сравнению с более сложными драйверами
Сравнение ULN2003A с другими драйверами шаговых двигателей
Как ULN2003A соотносится с другими популярными драйверами шаговых двигателей? Рассмотрим сравнение с несколькими распространенными решениями:
| Характеристика | ULN2003A | A4988 | DRV8825 |
|---|---|---|---|
| Максимальный ток | 500 мА на канал | 2 А (пиковый) | 2.5 А (пиковый) |
| Микрошаговый режим | Нет | До 1/16 шага | До 1/32 шага |
| Защитные функции | Базовые | Расширенные | Расширенные |
| Сложность применения | Низкая | Средняя | Средняя |
| Стоимость | Низкая | Средняя | Высокая |
Выбор конкретного драйвера зависит от требований проекта. ULN2003A идеально подходит для простых приложений с небольшой мощностью, в то время как A4988 и DRV8825 предоставляют более широкие возможности для управления мощными двигателями с высокой точностью.
Оптимизация работы ULN2003A для повышения эффективности
- Использование параллельного включения каналов для увеличения выходного тока
- Применение внешних силовых транзисторов для управления более мощными двигателями
- Оптимизация алгоритма управления для снижения энергопотребления
- Использование режима полушага для повышения плавности движения
- Добавление обратной связи для контроля положения ротора
Рассмотрим подробнее некоторые из этих методов:
Параллельное включение каналов
При необходимости управления двигателем с током обмоток, превышающим 500 мА, можно использовать параллельное включение нескольких каналов ULN2003A. Это позволит увеличить максимальный выходной ток пропорционально количеству задействованных каналов.
Оптимизация алгоритма управления
Для снижения энергопотребления и нагрева драйвера можно реализовать алгоритм управления с переменным током удержания. При этом ток через обмотки двигателя уменьшается в моменты, когда не требуется высокий удерживающий момент.

Режим полушага
Реализация режима полушага позволяет увеличить разрешение позиционирования в два раза и добиться более плавного вращения. Для этого необходимо модифицировать алгоритм управления, чередуя включение одной и двух обмоток на каждом шаге.
Применение этих методов оптимизации позволит расширить возможности использования ULN2003A и повысить эффективность работы шаговых двигателей в различных робототехнических проектах.
ELEGOO ULN2003 Stepper Motors and Motor Driver Boards Учебное пособие — ЭЛЕГО Официальный
Учебный комплект ELEGOO Smart Robot Car Kit V4.0
Нажмите, чтобы загрузить: 1. Скачать руководство + руководство + код + приложение +…
Читать далее
ELEGOO Conqueror Robot Tank Tutorial
НАЖМИТЕ, ЧТОБЫ СКАЧАТЬ: 1. Скачать руководство + учебник + код + приложение +…
Читать далее
ELEGOO OwlBot Учебное пособие по умному роботу-танку
Нажмите, чтобы загрузить: 1. Скачать руководство + руководство + код + приложение +…
Скачать руководство + руководство + код + приложение +…
Читать далее
Arduino IDE для Linux, Windows, Mac
Нажмите, чтобы загрузить: Arduino IDE для Windows Arduino IDE для Mac Arduino…
Читать далее
ELEGOO UNO R3 Project Самый полный учебник для начинающих
Нажмите, чтобы загрузить: 1. Учебник и код: (Обратите внимание на версию…
Читать далее
ELEGOO UNO Project Super Starter Kit Tutorial
Нажмите, чтобы загрузить: 1.
Читать далее
ELEGOO UNO Project Basic Starter Kit Tutorial
Нажмите, чтобы загрузить: ELEGOO UNO Project Basic Starter Kit
Читать далее
ELEGOO Mega 2560 Самый полный учебник для начинающих
Нажмите, чтобы загрузить: 1. Учебник и код: ELEGOO Arduino Mega 2560…
Читать далее
ELEGOO Mega 2560 Basic Starter Kit Tutorial
Нажмите, чтобы загрузить: ELEGOO Mega 2560 Basic Starter Kit
Читать далее
