Как подключить сервопривод к Arduino. Как запрограммировать Arduino для управления сервоприводом. Какие проекты можно реализовать с помощью сервопривода и Arduino. Какие библиотеки использовать для работы с сервоприводами на Arduino.
Что такое сервопривод и как он работает
Сервопривод — это электромеханическое устройство, которое позволяет точно контролировать угловое положение, скорость и ускорение. В отличие от обычных электродвигателей, сервоприводы могут удерживать заданное положение и обеспечивают обратную связь о текущем положении.
Основные компоненты сервопривода:
- Электродвигатель постоянного тока
- Редуктор для увеличения крутящего момента
- Потенциометр для определения положения вала
- Управляющая электроника
Как работает сервопривод?
- На вход подается управляющий сигнал с требуемым положением
- Электроника сравнивает его с текущим положением потенциометра
- При расхождении включается двигатель, поворачивающий вал
- Вал вращается, пока потенциометр не достигнет требуемого положения
- Двигатель останавливается, удерживая заданный угол
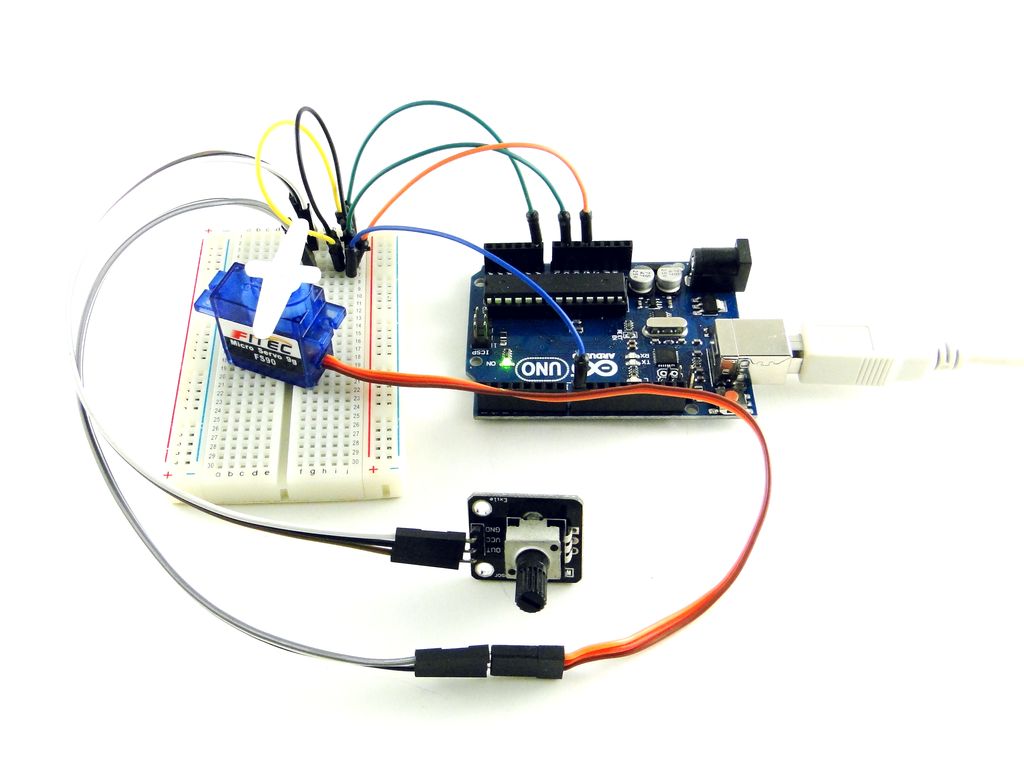
Подключение сервопривода к Arduino
Для подключения сервопривода к Arduino потребуется:
- Плата Arduino (например, Arduino Uno или Arduino Nano)
- Сервопривод
- Макетная плата
- Соединительные провода
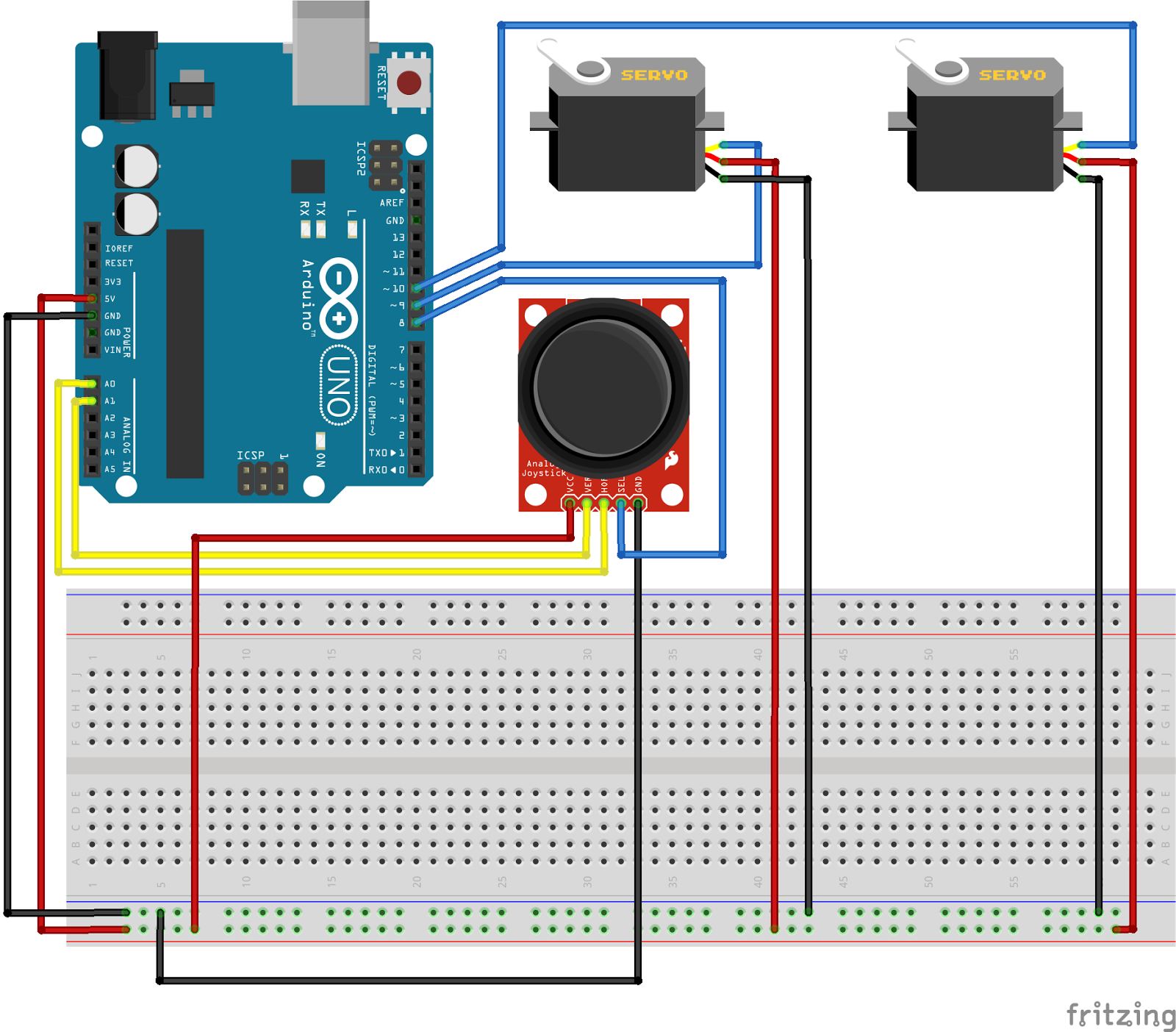
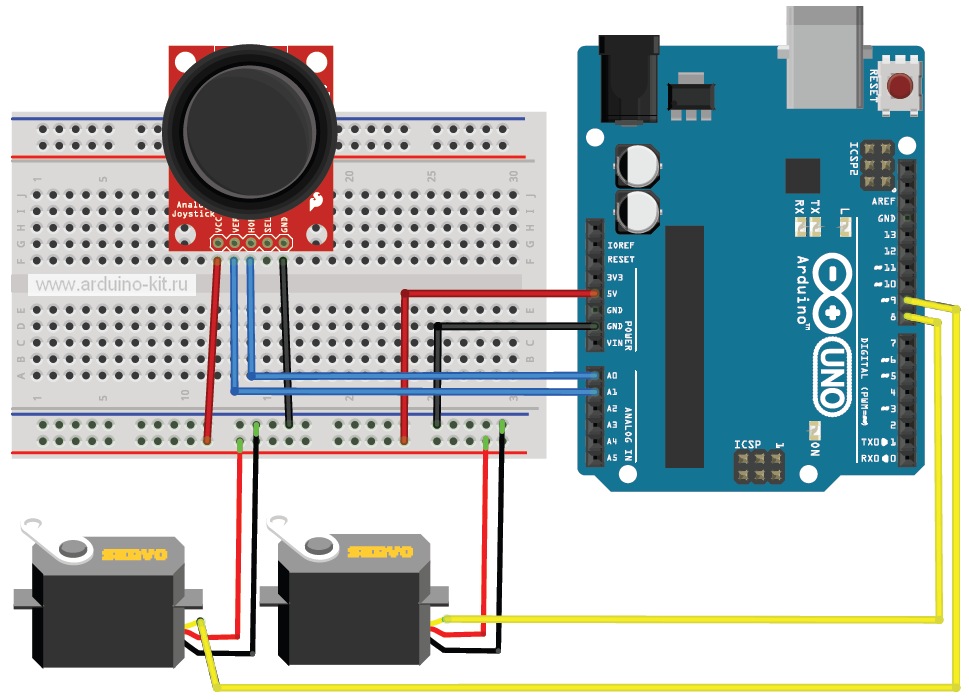
Схема подключения:
- Красный провод сервопривода подключите к выводу 5V Arduino
- Черный или коричневый провод — к GND Arduino
- Желтый или оранжевый сигнальный провод — к любому цифровому выводу Arduino (например, 9)
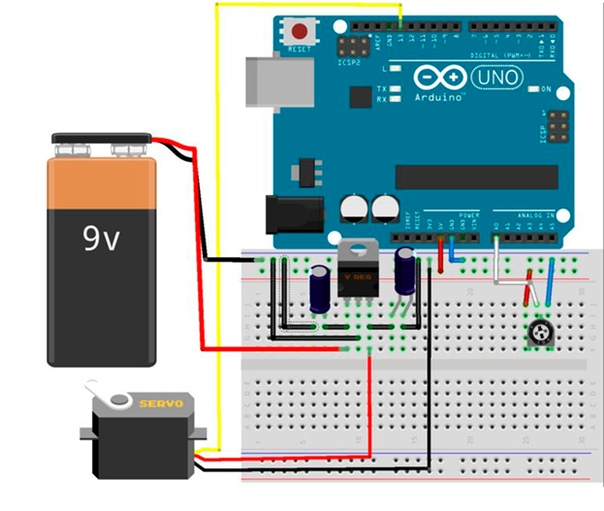
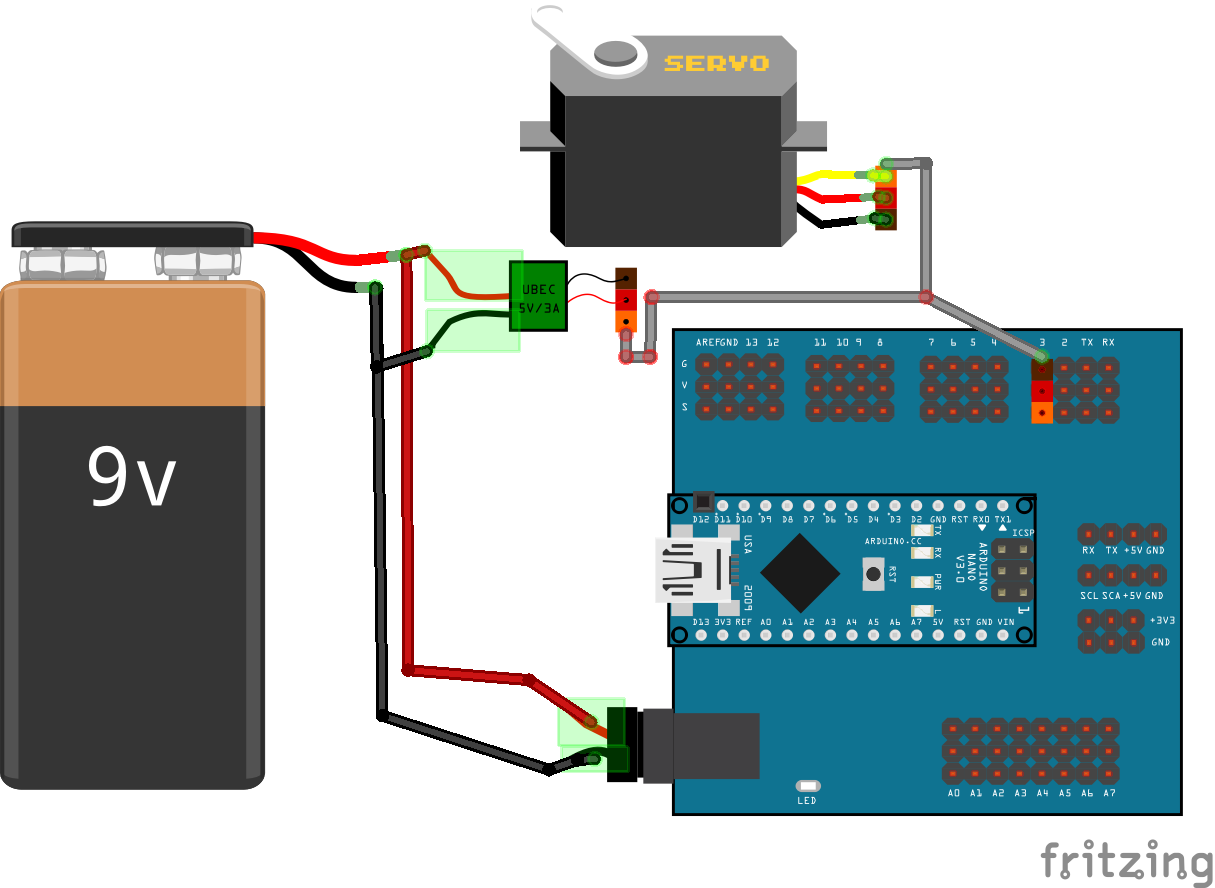
Важно: если вы используете несколько сервоприводов или мощные модели, может потребоваться внешний источник питания. Не забудьте соединить GND внешнего источника с GND Arduino.
Программирование Arduino для управления сервоприводом
Для управления сервоприводом с помощью Arduino можно использовать стандартную библиотеку Servo. Вот простой пример кода:
«`cpp #includeЭтот код заставит сервопривод плавно двигаться от 0 до 180 градусов и обратно.
Основные функции библиотеки Servo:
attach(pin): привязывает сервопривод к указанному пинуwrite(angle): устанавливает сервопривод в заданный угол (0-180)read(): возвращает текущий угол сервоприводаwriteMicroseconds(us): устанавливает положение через длительность импульса
Проекты с использованием сервоприводов и Arduino
Сервоприводы в сочетании с Arduino открывают широкие возможности для различных проектов:
- Робот-манипулятор: создайте роботизированную руку с несколькими степенями свободы
- Система слежения за солнцем: автоматически поворачивайте солнечные панели
- Автоматическая кормушка для животных: контролируйте подачу корма по расписанию
- Управление камерой: создайте систему панорамирования и наклона для камеры
- Интерактивные инсталляции: оживите искусство с помощью движущихся элементов
Продвинутые техники работы с сервоприводами
Плавное движение сервопривода
Для создания более плавного движения сервопривода можно использовать интерполяцию. Вот пример кода:
«`cpp #includeЭтот код обеспечивает более плавное движение сервопривода к целевой позиции, избегая резких рывков.
Управление несколькими сервоприводами
При работе с несколькими сервоприводами важно учитывать нагрузку на систему питания Arduino. Также следует оптимизировать код для эффективного управления:
- Используйте массивы для хранения объектов Servo и их позиций
- Применяйте циклы для одновременного обновления всех сервоприводов
- Рассмотрите возможность использования таймеров вместо delay() для более точного контроля
Применение сервоприводов в робототехнике
Сервоприводы играют ключевую роль в робототехнике, обеспечивая точное позиционирование и движение. Вот несколько примеров их применения:
- Шагающие роботы: сервоприводы управляют движением ног
- Роботы-манипуляторы: обеспечивают точное позиционирование в трехмерном пространстве
- Робоавтомобили: управляют поворотом колес и другими механизмами
- Квадрокоптеры: регулируют наклон пропеллеров для стабилизации и маневрирования
Как выбрать сервопривод для робототехнического проекта?
- Определите необходимый крутящий момент
- Учтите требуемую скорость вращения
- Рассмотрите размер и вес сервопривода
- Проверьте совместимость с вашей системой управления
- Оцените точность позиционирования
Альтернативные методы управления сервоприводами
Помимо стандартной библиотеки Servo, существуют и другие способы управления сервоприводами с помощью Arduino:
1. Прямое управление ШИМ
Можно напрямую генерировать ШИМ-сигнал для управления сервоприводом без использования библиотеки. Это дает больше контроля, но требует более глубокого понимания работы таймеров Arduino.
2. Использование специализированных драйверов
Для управления большим количеством сервоприводов или при необходимости более точного контроля можно использовать специальные драйверы, например, PCA9685. Они позволяют управлять до 16 сервоприводами с высокой точностью через I2C интерфейс.
3. Применение контроллеров движения
В сложных робототехнических проектах могут использоваться специализированные контроллеры движения, которые берут на себя все расчеты и генерацию управляющих сигналов, оставляя Arduino свободным для выполнения других задач.
Оптимизация энергопотребления при работе с сервоприводами
При работе с сервоприводами важно учитывать их энергопотребление, особенно в проектах с батарейным питанием. Вот несколько советов по оптимизации:
- Используйте режим сна для сервоприводов, когда они не нужны
- Применяйте понижающие преобразователи для эффективного питания
- Рассмотрите возможность использования сервоприводов с меньшим энергопотреблением
- Оптимизируйте алгоритмы движения для минимизации активного времени работы
Как рассчитать энергопотребление сервопривода?
- Определите рабочее напряжение сервопривода
- Измерьте ток потребления в различных режимах работы
- Учтите время активной работы и время простоя
- Рассчитайте среднее энергопотребление за цикл работы
- Умножьте на предполагаемое время работы устройства
Это поможет правильно подобрать источник питания и оценить время автономной работы вашего устройства.
Управление стандартным серводвигателем с помощью оборудования Arduino — MATLAB & Simulink Example
В этом примере показано, как использовать пакет поддержки Simulink® для оборудования Arduino® для управления стандартным серводвигателем.
Предоставленная модель предварительно сконфигурирована для Arduino Mega 2560 и может быть запущена на любой из плат, перечисленных в разделе «Поддерживаемое оборудование», путем изменения параметра «Аппаратная плата» в диалоговом окне параметров конфигурации модели, как описано в Задаче 1 этого примера.
Введение
Пакет поддержки Simulink для оборудования Arduino позволяет создавать и запускать модели Simulink на плате Arduino. Цель включает в себя библиотеку блоков Simulink для настройки и доступа к датчикам, исполнительным механизмам и коммуникационным интерфейсам Arduino.
В этом примере вы узнаете, как создать модель Simulink, которая управляет стандартным серводвигателем. В стандартном серводвигателе можно точно установить положение вала, обычно от 0 до 180 градусов. Серводвигатели используются во многих промышленных, военных и потребительских приложениях и продуктах.
Серводвигатели используются во многих промышленных, военных и потребительских приложениях и продуктах.
Предварительные условия
Прежде чем приступить к этому примеру, мы рекомендуем вам выполнить пример «Начало работы с оборудованием Arduino».
Required Hardware
To run this example you will need the following hardware:
-
Supported Arduino board
-
USB cable
-
Standard servo motor
-
Potentiometer
-
CdS photocell
-
Резистор 10 кОм
-
Провода макетной платы
-
Небольшая макетная плата (рекомендуется)
Задача 1. Настройка модели Simulink для поддерживаемого оборудования Arduino
В этой задаче вы настроите модель для поддерживаемой платы Arduino.
1. В модели Simulink щелкните Simulation > Model Configuration Parameters , чтобы открыть Параметры конфигурации диалоговое окно.
2. Выберите панель Аппаратная реализация и выберите необходимое оборудование Arduino из списка параметров Аппаратная плата . Не изменяйте никакие другие настройки.
3. Нажмите OK .
Задание 2. Подключение серводвигателя к плате Arduino
В этом задании вы подключите двигатель к плате Arduino. Серводвигатели имеют три провода: питание, земля и сигнал. Подсоедините их, как описано ниже.
1. Подключите провод питания (обычно красный) к контакту 5V.
2. Подсоедините провод заземления (обычно черный) к контакту заземления.
3. Подсоедините сигнальный провод (обычно оранжевый) к цифровому контакту 4. Для получения дополнительной информации см. раздел Назначение контактов для блоков, зависящих от таймера Arduino.
Задача 3. Установка положения серводвигателя с помощью внутреннего источника
В этой задаче вы установите положение вала серводвигателя с помощью внутреннего источника.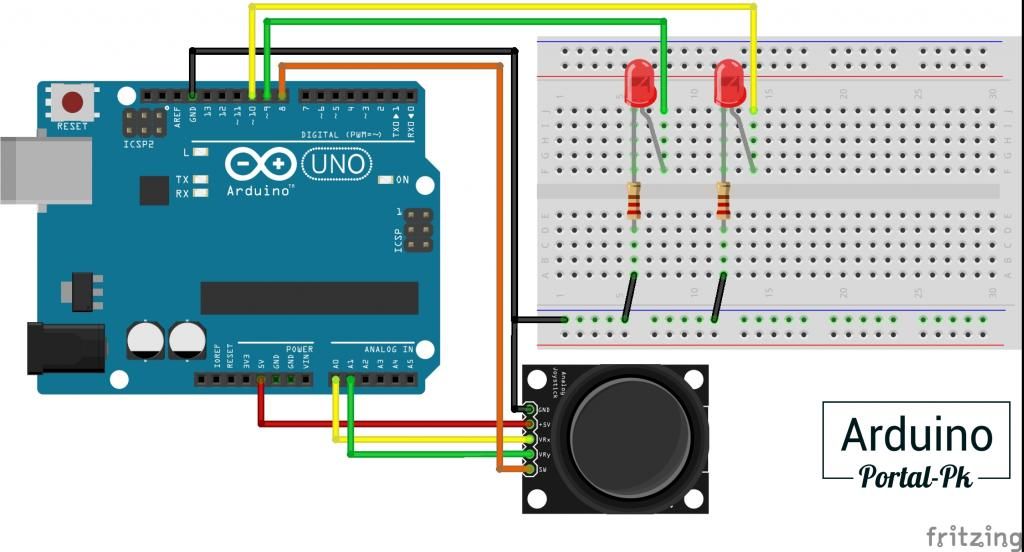 Угол вала будет варьироваться от 0 до 180 градусов вверх и вниз.
Угол вала будет варьироваться от 0 до 180 градусов вверх и вниз.
1. Откройте модель управления сервоприводом.
2. Обратите внимание на блок Standard Servo Write . Блок устанавливает новый угол вала серводвигателя каждые 0,01 секунды.
3. В модели Simulink щелкните Simulation > Model Configuration Parameters , чтобы открыть диалоговое окно Configuration Parameters .
4. Выберите панель аппаратной реализации и выберите необходимое оборудование Arduino из Список параметров аппаратной платы . Не изменяйте никакие другие настройки.
5. На вкладке Hardware модели Simulink в разделе Mode выберите Run on board и затем нажмите Build, Deploy & Start .
6. Когда модель начнет работать на плате Arduino, наблюдайте, как положение вала двигателя колеблется от 0 до 180 градусов.
Задача 4 — Управление положением серводвигателя с помощью потенциометра
В этом задании вы установите положение вала серводвигателя вручную с помощью потенциометра. Подключите внешние контакты потенциометра к контактам 5V и GND на плате Arduino. Подключите среднюю клемму к контакту аналогового входа 0. При вращении потенциометра его сопротивление изменяется. В результате изменяется и напряжение на аналоговом входе. Ваша задача установить угол серводвигателя пропорциональный этому напряжению.
1. В MATLAB® выберите HOME > New > Simulink Model.
2. Введите slLibraryBrowser в приглашении MATLAB®. Это открывает Браузер Библиотеки Simulink.
3. В браузере библиотек Simulink перейдите к Пакет поддержки Simulink для оборудования Arduino > Common .
4. Перетащите блок Analog Input в модель. Дважды щелкните блок и установите номер вывода на 0, а время выборки на 0,01 секунды.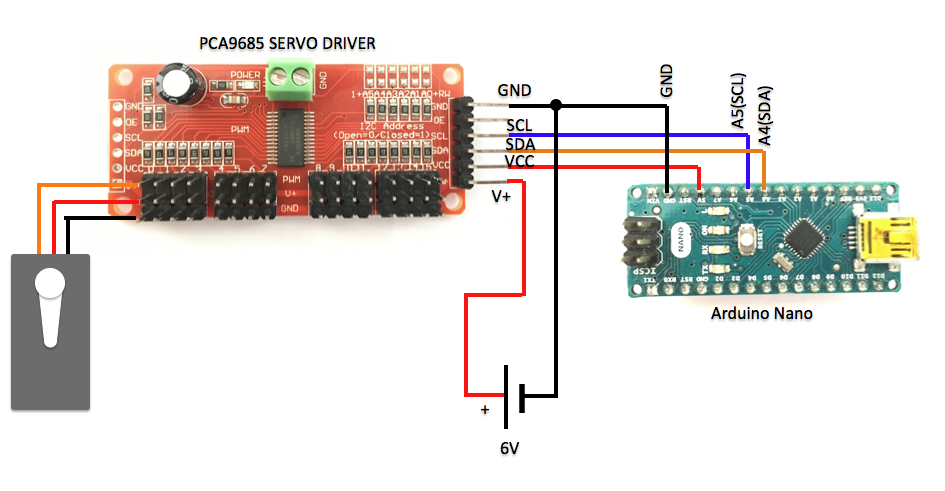
5. Перетащите Стандартный сервопривод Запишите блок в модель. Дважды щелкните блок и установите номер контакта на 4.
6. Соедините блоки аналогового входа и блоки Standard Servo Write .
7. Из библиотеки Simulink Math Operations перетащите блок Gain в модель и поместите его на линию, соединяющую аналоговый вход и блок Standard Servo Write . Дважды щелкните значок Gain 9.0062 и установите его значение на 0,1760 (максимальное смещение серводвигателя в градусах, деленное на цифровое разрешение аналогового входа, т. е. 180/1023).
8. В модели Simulink щелкните Simulation > Model Configuration Parameters , чтобы открыть диалоговое окно Configuration Parameters .
9. Выберите панель Аппаратная реализация и выберите необходимое оборудование Arduino из списка параметров Аппаратная плата .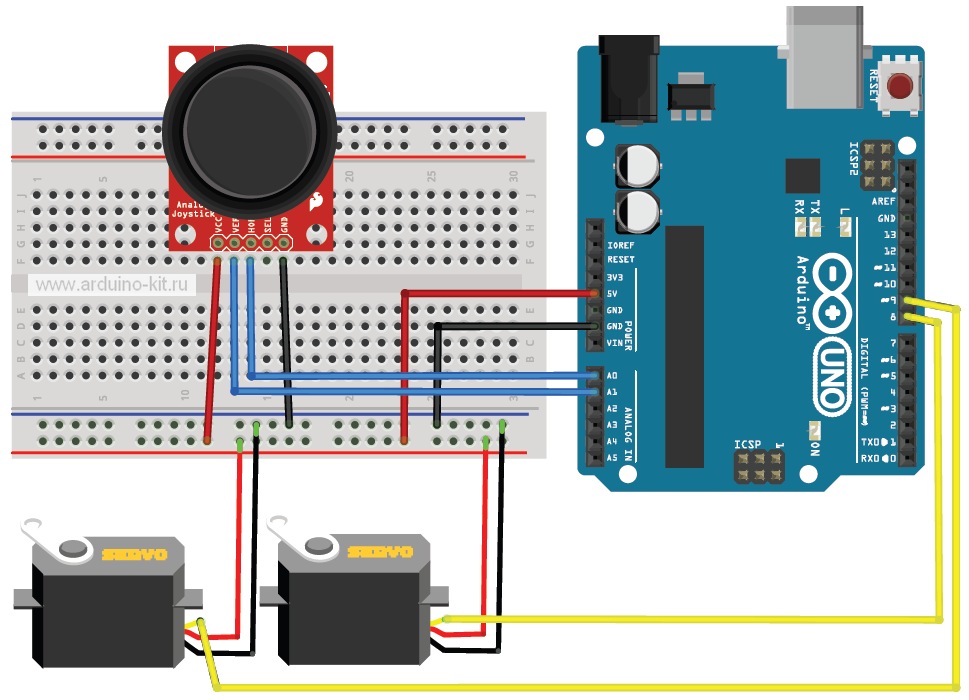 Не изменяйте никакие другие настройки.
Не изменяйте никакие другие настройки.
10. Нажмите OK .
11. На вкладке Hardware модели Simulink в разделе Mode выберите Run on board и затем нажмите Build, Deploy & Start . Теперь модель Simulink будет развернута на аппаратном обеспечении Arduino.
12. Когда модель начнет работать на плате Arduino, наблюдайте, как вал двигателя колеблется в диапазоне от 0 до 180 градусов.
Если у вас возникли проблемы с созданием модели, как описано выше, вы можете использовать модель Servo Control.
Задача 5. Управление положением серводвигателя с помощью фотоэлемента
В этом задании вы создадите модель, которая устанавливает положение серводвигателя в соответствии с интенсивностью света, определяемой фотоэлементом. В темной комнате вал двигателя должен располагаться под углом 0 градусов, а в ярко освещенной комнате он должен располагаться под углом 180 градусов.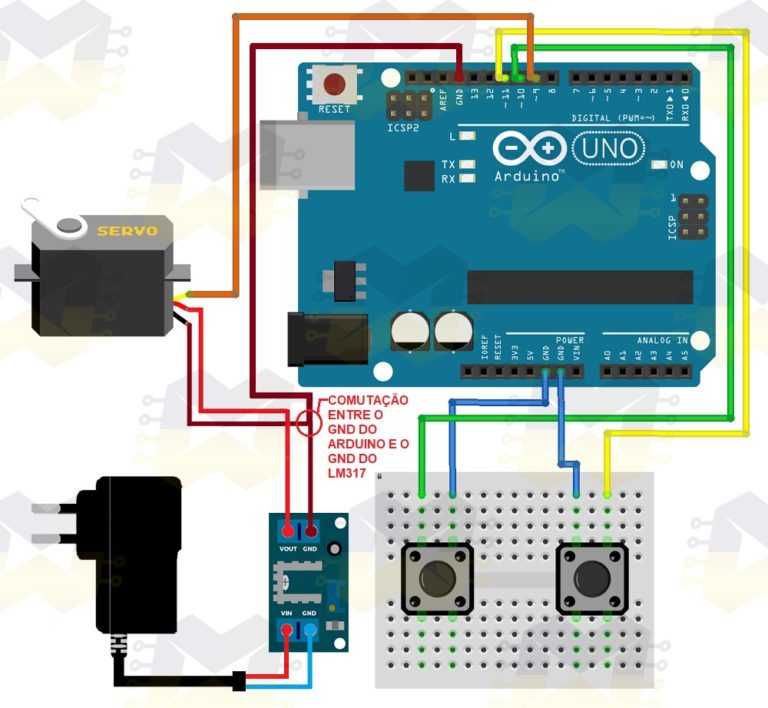
Используйте фотоэлемент и резистор вместо потенциометра, который вы использовали в Задаче 4. Подключите один конец фотоэлемента к контакту 5V на плате Arduino. Затем подключите один конец резистора к контакту GND на плате. Подключите другие концы фотоэлемента и резистора вместе, а затем к контакту 0 аналогового входа на плате.
Модель будет аналогична той, что использовалась в Задаче 4.
Другие вещи, которые стоит попробовать
Поэкспериментируйте с другими блоками в библиотеке блоков Arduino. Например:
-
Используйте блок цифровых входов для регулировки положения вала двигателя в зависимости от внешнего управляющего сигнала или сигналов.
-
Используйте блок Standard Servo Read для считывания положения вала двигателя и сравнения его с требуемым положением.
Беспроводная версия платы управления сервоприводом SunFounder для Arduino Nano и NRF24L01
Скидка 0%
SunFounderSKU: TS0233
наполнитель
Поделитесь этим продуктом
Плата расширения объединяет разъемы для Arduino Nano, NRF24L01 и 12 сервоприводов вместе со схемой постоянного тока. Вы можете использовать эту плату для управления роботом или некоторыми другими устройствами, которые содержат несколько сервоприводов.
Вы можете использовать эту плату для управления роботом или некоторыми другими устройствами, которые содержат несколько сервоприводов.
Может использоваться в качестве платы управления сервоприводом в проектах роботов.
ПРИМЕЧАНИЕ. Напряжение питания должно быть в допустимых пределах.
Характеристики
- Включает разъемы для Arduino Nano и NRF24L01
- Интегрирует цепь постоянного тока 5 В, 3 А
- Содержит штыревые разъемы для 12 сервоприводов
- Рабочее напряжение: 7-12В; с выключателем питания на плате
- Простота использования с дистанционным управлением для ваших проектов
Список пакетов
- Беспроводная версия платы управления сервоприводом x 1
1. Время обработки заказов
Все заказы обрабатываются в течение 24 часов после их размещения. Обычно мы можем отправить заказ на следующий день. Заказы выходного дня отправляются в следующий понедельник.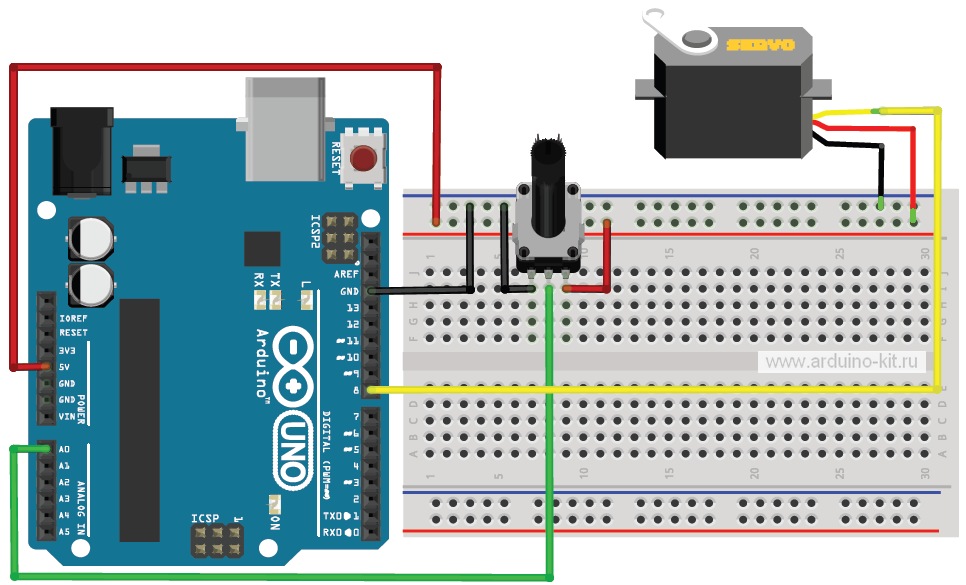 Вы получите электронное письмо с подтверждением доставки от нашей системы, когда информация о доставке будет загружена.
Вы получите электронное письмо с подтверждением доставки от нашей системы, когда информация о доставке будет загружена.
2. Бесплатная доставка ВСЕХ заказов
Как правило, мы отправляем заказы с бесплатной доставкой без требования минимальной суммы заказа. Вы можете проверить, доступен ли способ бесплатной доставки в вашу страну, в зоне доставки ниже.
Если вы не нашли свою страну в зоне доставки, свяжитесь с нами по телефону [email protected] , и наши сотрудники отдела продаж свяжутся с вами как можно скорее.
Для дистрибьюторов, пожалуйста, свяжитесь с нами по дистрибьютор@sunfounder.com для получения более подробной информации о доставке.
ПРИМЕЧАНИЕ: Все заказы будут отправлены с нашего склада в Китае.
3. Зона доставки
Азия
САР Гонконг, Япония, САР Макао, Малайзия, Филиппины, Россия, Сингапур, Южная Корея, Таиланд, Вьетнам и т. д.
Европа
Австрия, Бельгия, Чехия, Дания, Финляндия, Франция, Германия, Греция, Венгрия, Италия, Литва, Люксембург, Монако, Нидерланды, Норвегия, Польша, Португалия, Словакия, Словения, Испания, Швеция, Швейцария, Турция , Украина, Великобритания и др.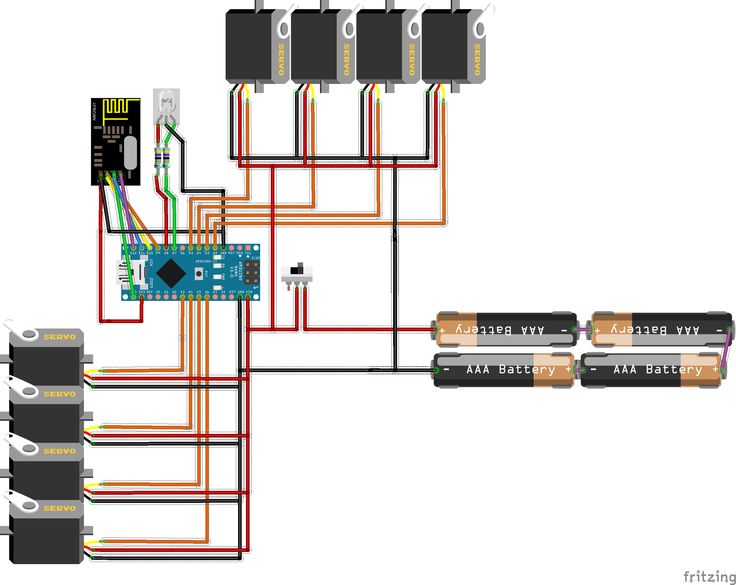
Океания
Австралия, Новая Зеландия
Северная Америка
Канада, Мексика, США
4. Как я могу отследить свой заказ?
ЕСТЬ СЧЕТ SUNFOUNDER?
Полегче! Войдите в свою учетную запись через интернет-магазин, проверьте статус выполнения вашего недавнего заказа. Если заказ был выполнен, нажмите на информацию о заказе, и вы можете найти информацию об отслеживании здесь.
У МЕНЯ ПОКА НЕТ АККАУНТА
Как только ваш заказ будет упакован и отправлен, вы получите электронное письмо с подтверждением доставки. После этого вы сможете отслеживать свой заказ по ссылке для отслеживания в электронном письме. Если вы еще не получили электронное письмо, свяжитесь с нами по телефону service @sunfounder.com , наши сотрудники отдела продаж свяжутся с вами как можно скорее.
5. Способ доставки и сроки доставки
DHL (заказы на сумму более 400 долларов США)
Срок доставки: 3-7 рабочих дней
Вы можете отслеживать на http://www.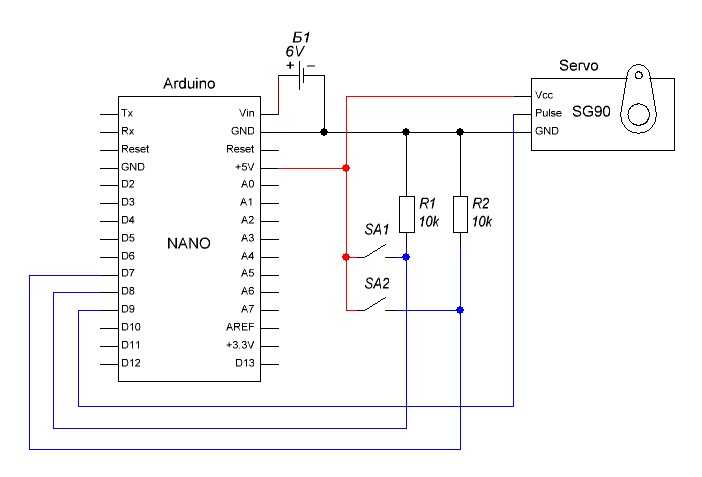 dhl.com/ или https://www.17track.net/en
dhl.com/ или https://www.17track.net/en
UPS (заказы на сумму более 400 долларов США)
Срок доставки: 3-7 рабочих дней
Вы можете отслеживать на https://www.ups.com/track или https://www.17track.net/en
USPS
Срок доставки: 7-12 рабочих дней
Вы можете отслеживать на https://www.usps.com / или https://www.17track.net/en
ЗАРЕГИСТРИРОВАННАЯ АВИА-ПОЧТА
Срок доставки: 12-15 рабочих дней
Вы можете отслеживать на https://www.17track.net/en
Super Economy Global
Срок доставки: 30–60 рабочих дней
Отслеживание невозможно
* Сроки доставки — это примерные сроки доставки, предоставленные нашими партнерами по доставке, и они применяются в пункте отправки, а не в пункте продажи. Как только ваша посылка покидает наш склад, мы не можем контролировать любые задержки после этого момента.
6. Таможенные и импортные сборы
Например, товары, которые вы покупаете на нашем сайте, нельзя просто свободно доставлять из страны в страну.
