Как работают тиристоры и симисторы. Какие существуют способы управления тиристорами. Какие преимущества дает использование микроконтроллеров для управления тиристорами. Какие схемотехнические решения применяются для управления тиристорными модулями.
Принцип работы тиристоров и симисторов
Тиристоры и симисторы являются полупроводниковыми приборами с тремя выводами, которые широко применяются для коммутации и регулирования мощности в силовой электронике. Их главное отличие от транзисторов заключается в триггерном принципе работы.
Как работает тиристор:
- В закрытом состоянии ток через тиристор не протекает
- При подаче управляющего импульса на управляющий электрод тиристор открывается и начинает проводить ток
- Тиристор остается открытым даже после снятия управляющего сигнала, пока через него протекает прямой ток
- Закрывается тиристор при снижении тока до нуля
Симистор отличается от тиристора тем, что может проводить ток в обоих направлениях. Это позволяет использовать его для регулирования переменного тока.
Способы управления тиристорами
Существует два основных способа управления тиристорами:
1. Фазовое регулирование
При фазовом регулировании управляющий импульс подается на тиристор с некоторой задержкой относительно начала полупериода сетевого напряжения. Чем больше задержка, тем меньшая часть синусоиды пропускается через нагрузку.
2. Управление с контролем нулевого перехода
В этом случае тиристор включается в начале каждого полупериода. Регулирование мощности осуществляется за счет пропускания или блокирования целых полупериодов. Такой способ создает меньше помех.
Преимущества использования микроконтроллеров для управления тиристорами
Применение микроконтроллеров позволяет реализовать более сложные алгоритмы управления тиристорами:
- Точная синхронизация с сетевым напряжением
- Программируемые режимы плавного пуска и остановки
- Ограничение пусковых токов
- Защита от аварийных режимов
- Реализация обратных связей по току и напряжению
- Возможность управления по цифровым интерфейсам
Схемотехнические решения для управления тиристорными модулями
Рассмотрим некоторые схемотехнические решения, применяемые для управления тиристорными модулями с помощью микроконтроллеров:

Драйвер SKHIT 01 для трехфазного тиристорного моста
Драйвер SKHIT 01 компании SEMIKRON предназначен для управления трехфазным полууправляемым тиристорным мостом. Его основные особенности:
- Максимальное входное напряжение 530 В
- Выходной ток управления 400 мА
- Гальваническая изоляция 2500 В
- Встроенная схема ограничения тока заряда конденсаторов
Контроллеры серии SKPC
Контроллеры SKPC представляют новое поколение модулей управления тиристорами от SEMIKRON. Их ключевые особенности:
- Управление по TTL/CMOS уровням
- Гальваническая изоляция цепей управления
- Соответствие стандартам UL, CSA, VDE
- Согласованность с тиристорными модулями SEMIPACK
Практические схемы применения тиристорных контроллеров
Рассмотрим несколько практических схем, в которых могут применяться тиристорные контроллеры:
Регулятор мощности однофазной нагрузки
Простейшая схема регулятора мощности на базе симистора или пары встречно-параллельных тиристоров. Управление осуществляется методом фазового регулирования.
Трехфазный коммутатор нагрузки
Схема для коммутации трехфазной нагрузки на основе трех пар встречно-параллельных тиристоров. Управление осуществляется с контролем перехода через ноль для минимизации помех.
Управляемый выпрямитель
Трехфазная мостовая схема на тиристорах для получения регулируемого постоянного напряжения. Применяется для питания двигателей постоянного тока, гальванических ванн и т.п.
Заключение
Использование специализированных драйверов и контроллеров в сочетании с микропроцессорным управлением позволяет создавать эффективные системы управления тиристорными преобразователями. Это обеспечивает:
- Высокую точность и стабильность регулирования
- Реализацию сложных алгоритмов управления
- Защиту силовых элементов
- Снижение уровня помех
- Возможность интеграции в современные системы автоматизации
Таким образом, несмотря на появление новых типов силовых полупроводников, тиристоры остаются востребованными элементами силовой электроники благодаря простоте управления, надежности и низкой стоимости.
Мир микроконтроллеров — управление тиристором » Радиоэлектроника
В данной статье приводится несколько схемных решений и описываются методы дозволяющие процессору управлять наружной нагрузкой с помощью тиристорных ключей.
Время от времени нужно, что бы микропроцессорное устройство управляло сильными электроприборами, получающими питание от сети переменного напряжения 220В. К примеру, нагревательными элементами, моторами, соленоидами, лампами уличного освещения и т. д. Для решения схожей задачки нужно сделать сильную схему управления, модифицирующие сигналы стандартных логических уровней в сигналы управления цепями высочайшей мощности. 2-ая неувязка, которую необходимо решить при разработке схожих схем: это гальваническая развязка цепей микроконтроллера и управляемых им цепей 220В. Без таковой развязки эксплуатация подобного устройства станет очень опасной. Решение трудности находится в зависимости от того, каким методом нужно управлять нагрузкой.
Главные схемы
Разглядим несколько вариантов вероятных решений. Один из таких вариантов приведен на рисунке 1.
Рис. 1.
В схеме употребляется даже не тиристор, а мощнейший семистор TC106-10. Этот семистор позволяет коммутировать нагрузку до 10 ампер. Для справки: семистор отличается от тиристора тем, что он работает с обоими полупериодами переменного напряжения, другими словами, в открытом состоянии он пропускает как положительную, так и отрицательную полуволны. Для гальванической развязки цепей микроконтроллера и силовых цепей нагрузки употребляется оптодинистор АОУ103Б. Для того, что бы не создавать излишней нагрузки на выход микроконтроллера для управления светодиодом фотодинистора употребляется ключ на транзисторе КТ361. Что бы отключить нагрузку от источника питания 220В микроконтроллер должен выставить на собственном выходе (в этом случае на выходе PB4 сигнал логической единицы. При всем этом ключ VT1 запирается, ток через светодиод фотодинистора не течет, и семистор тоже закрыт. Когда необходимо включить нагрузку, микроконтроллер устанавливает на собственном выходе логический ноль. Транзистор VT1 раскрывается, светодиод фотодинистора загорается и освещает динистор. Динистор начинает раскрываться в каждом полупериоде напряжения. Через диодный мостик, обозначенный, как VD1 динистор подключен к управляющему электроду семистора VS1. Потому в каждом полупериоде семистор тоже раскрывается и на нагрузку поступает полное напряжение питания. Диодный мостик VD1 нужен поэтому, что динистр может работать только в одном направлении. Он раскрывается только тогда, когда на его верхнем по схеме выводе плюс а на нижнем минус. В оборотном направление динистор не раскрывается. Если подключить динистор к семистору впрямую, то и семистор тоже сумеет пропускать только одну из полуволн питающего напряжения.
Что бы отключить нагрузку от источника питания 220В микроконтроллер должен выставить на собственном выходе (в этом случае на выходе PB4 сигнал логической единицы. При всем этом ключ VT1 запирается, ток через светодиод фотодинистора не течет, и семистор тоже закрыт. Когда необходимо включить нагрузку, микроконтроллер устанавливает на собственном выходе логический ноль. Транзистор VT1 раскрывается, светодиод фотодинистора загорается и освещает динистор. Динистор начинает раскрываться в каждом полупериоде напряжения. Через диодный мостик, обозначенный, как VD1 динистор подключен к управляющему электроду семистора VS1. Потому в каждом полупериоде семистор тоже раскрывается и на нагрузку поступает полное напряжение питания. Диодный мостик VD1 нужен поэтому, что динистр может работать только в одном направлении. Он раскрывается только тогда, когда на его верхнем по схеме выводе плюс а на нижнем минус. В оборотном направление динистор не раскрывается. Если подключить динистор к семистору впрямую, то и семистор тоже сумеет пропускать только одну из полуволн питающего напряжения.
Рис. 2.
На рисунке 2 приведен 2-ой вариант схемы управления тиристором. Эта схема отличается от предшествующей отсутствием диодного мостика. Заместо этого в схеме употребляются сходу два оптодинистора U1 и U2. Светодиоды обеих фотодинисторов включены поочередно и управляются от микроконтроллера через эмитерный повторитель на транзисторе VT1. Динисторы же включены встречно параллельно. При всем этом какой-то из них работает при положительной полуволне, а 2-ой при отрицательной. В остальном работа схемы подобна предшествующему примеру. Отличие только в том, что для включения нагрузки микроконтроллер должен установить на собственном выходе высочайший логический уровень, а для выключения маленький. Другими словами, можно сказать, что схема на рис. 1 инвертирующая, а схема на рис. 2 неинвертирующая.
В заключении необходимо сказать, что развитие элементной базы дает нам новые способности в постороении схем управления сильной нагрузкой в сети 220В. Сейчас разработчик имеет в собственном распоряжении таковой новый элемент, как мощнейший оптодинистор, который с фуррором подменяет пару: тиристор-оптодинистор и позволяет выстроить более обыкновенные и надежные схемы. Подробнее об этом читайте в статье «Управление оптодинистором».
Плавная регулировка мощности
Если нужно не просто включить либо выключить нагрузку, а плавненько регулировать ее мощность, то приведенные выше схемы так же подходят для этого. Необходимо только поменять метод управления. Существует два способа плавной регулировки. Мы опишем их чуток ниже. Оба способа употребляют синхронизацию микроконтроллера с фазой колебаний переменного напряжения сети. Для синхронизации нам нужно сформировать и подать на микроконтроллер сигнал, по которому он сумеет определять начало и конец каждого полупериода.
Способ фазового регулирования
Это стандартный метод управления тиристором. Состоит он в выборе момента открытия тиристора относительно начала фазы текущего полупериода питающего напряжения. Этот процесс иллюстрирует последующий набросок:
Фазовый способ регулирования
На рисунке приведена форма сигнала на нагрузке при различных значениях времени задержки. Алгоритмм регулирования заключается в том, что поначалу контроллер ждет начала еще одного полупериода. Найдя начало полупериода, контроллер запускает внутренний таймер. По окончании задержки, создаваемой таймером контроллер выдает запускающий сигнал на выход, управляющий тиристорным регулятором. Тиристор раскрывается и напряжение поступает на нагрузку.
Способ исключения отдельных полупериодов
Основным недочетом предшествующего способа является большой уровень электрических помех, излучаемых тиристорным ключем в процессе работы. Схожая схема будет очень мешать рядом работающему телеку либо радиоприемнику, создавая помехи на дисплее и по звуку. Большой уровень помех обоснован тем, что включение тиристора происходит в момент, когда секундное значение сетевого напряжения находится поблизости его амплитуды. Крутые фронты довольно огромного уровня напряжения и делают огромное количество помех. Выходом является 2-ой способ регулирования. Он заключается в том, что включение тиристора всегда происходит в самом начале полупериода, когда напряжение перебегает через ноль и, если полупериод пропускается в нагрузку, то весь стопроцентно. Регулировка же мощности делается методом исключения отдельных полупериодов. Этот процесс показан на последующем рисунке:
Выходом является 2-ой способ регулирования. Он заключается в том, что включение тиристора всегда происходит в самом начале полупериода, когда напряжение перебегает через ноль и, если полупериод пропускается в нагрузку, то весь стопроцентно. Регулировка же мощности делается методом исключения отдельных полупериодов. Этот процесс показан на последующем рисунке:
Способ исключения полупериода
На рисунке мы лицезреем, что все полупериоды с первого по 5-ый тиристор беспрепятственно раскрывается. Потом, во время прохождения шестого полупериода сигнал управления с тиристора снимается и напряжение на выход не поступает. Сначала седьмого полупериода сигнал управления снова врубается. Для реализации подобного способа разрабатываются целые схемы исключения полупериодов. К примеру, берется последовательность из 10 полупериодов. Для того, что бы получить мощность в 50%, 5 полупериодов пропускают в нагрузку, а другие 5 не пропускают. Потом все повторяется, каждые 10 полупериодов. При этом не непременно исключать полупериоды попорядку. Можно разбросать включенные полупериоды по всему этому отрезку. Для получения 10% мощности из 10 придется бросить только один полупериод. А для 70% необходимо бросить 7 а исключить три. Ну и т. д….
Недочетом такового метода будет то, что схожим образом проблемно регулировать мощность свечения электронной лампы. Лампа будет приметно мелькать. Но для регулировки мощности нагревательного элемента этот метод является самым хорошим.
(PDF) Тиристорный регулятор мощности переменного тока на микроконтроллере
Тиристор и симистор управляются подобно триггеру. При подаче
управляющего импульса в цепь управления (напряжение между управляющим
электродом и катодом) тиристор резко переходит в открытое состояние и
остается в таком состоянии до тех пор, пока через него проходит прямой ток,
даже если управляющий сигнал прекратился. Поэтому тиристоры можно
открывать короткими импульсами. Закрываются они сами при снижении тока до
Закрываются они сами при снижении тока до
нуля. На переменном токе каждый тиристор можно открывать в полуволне
напряжения одного знака, поскольку тиристор проводит силовой ток в одном
направлении, как диод. Симистор может проводить ток в обоих направлениях и
открывается в любой полуволне напряжения.
Если открывающий импульс сместить относительно начала полуволны
напряжения на время
t, то на нагрузке выделится только ее часть. Изменяя с
помощью напряжения регулировки
V временное смещение
t можно
регулировать ширину части полуволны напряжения
V, которое
прикладывается к нагрузке. Такой способ регулирования называют фазовым.
Система управления
Микроконтроллер в системе управления выполняет функции фазового
регулятора. Назначение выводов микроконтроллера в данной схеме следующее:
Аналоговые входы 0-5 В
GP0 – напряжение регулировки угла
или временного смещения
t
открывания вентиля,
GP1 – задатчик времени нарастания и спада угла регулировки от 0 до
максимума в пределах 20 мс-10 с,
GP2 – задатчик времени реакции на провалы напряжения сети 20 мс-2,56 с,
Дискретные порты
GP3 – вход синхроимпульсов,
GP4 – выход индикатора задаваемого угла проводимости вентиля,
GP5 – выход открывающих импульсов.
Система управления работает следующим образом. В нормальном режиме
на выводе GP3 микроконтроллера должны быть синхроимпульсы с частотой
100 Гц ±5%, поступающие через оптрон синхронизации. Тогда на выходе GP4
будут индикаторные импульсы и на выходе GP5 – серии открывающих
импульсов с частотой синхроимпульсов. Выходные импульсы разрешены при
напряжении регулировки
V>0,1 В. Изменение напряжения регулировки
V от примерно 0,1 В до 5 В вызовет изменение временного смещения
t
открывающих импульсов от 10мс до нуля, как видно на диаграмме напряжений
регулятора. Возможна регулировка потенциометром и внешним сигналом в виде
постоянного либо импульсного напряжения с частотой более 500 Гц.
Программный алгоритм микроконтроллера имеет функции временной
фильтрации импульсных помех сигнала синхронизации, что позволяет сохранять
устойчивую работу системы управления в условиях промышленной сети.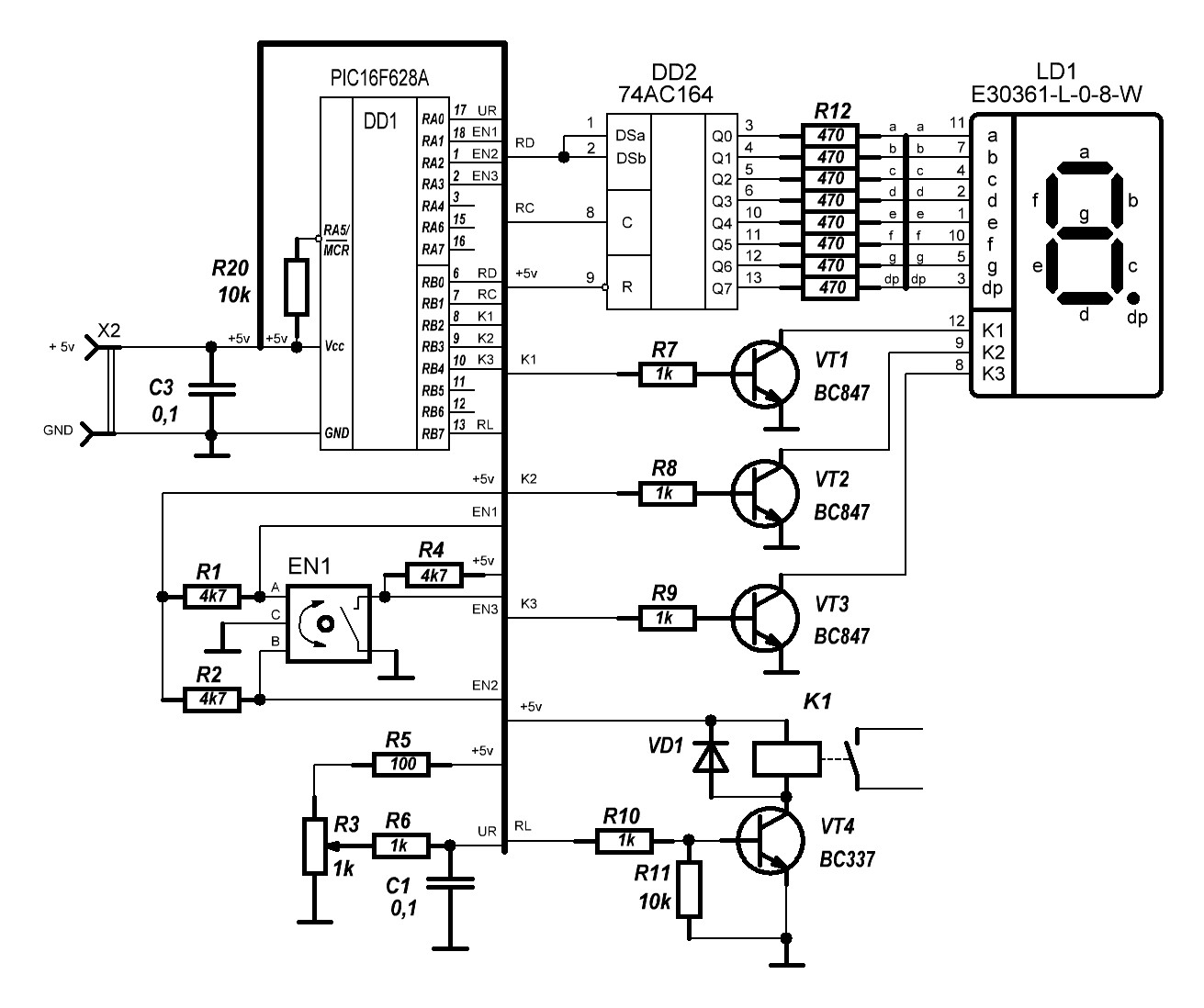
Драйверы SEMIKRON для управления тиристорными модулями — Компоненты и технологии
Трудно спорить с тем, что самыми популярными элементами для мощных импульсных применений являются транзисторы MOSFET и IGBT. Это объясняется, в первую очередь, большими значениями достижимой плотности мощности, компактностью и высокой эффективностью построенных на их основе преобразователей. Кроме того, эти компоненты позволяют разрабатывать импульсные преобразовательные устройства, удовлетворяющие жестким требованиям по электромагнитной совместимости.
Однако тиристоры и симисторы еще долго будут оставаться элементами, привлекательными для разработчиков, благодаря своей дешевизне, простоте управления и надежности. Именно поэтому они выпускаются практически всеми крупнейшими изготовителями силовых полупроводников.
Компания SEMIKRON является одним из ведущих мировых производителей, специализирующимся на разработке компонентов для изделий силовой электронной техники: электротранспорта, приводов, блоков вторичного электропитания, устройств промышленной автоматизации и энергетики, автомобильной промышленности. Кроме известных на весь мир модулей IGBT SEMIKRON производит широкую гамму компонентов общего применения, в том числе тиристорные модули и контроллеры для управления ими, речь о которых и пойдет в данной статье.
Кроме известных на весь мир модулей IGBT SEMIKRON производит широкую гамму компонентов общего применения, в том числе тиристорные модули и контроллеры для управления ими, речь о которых и пойдет в данной статье.
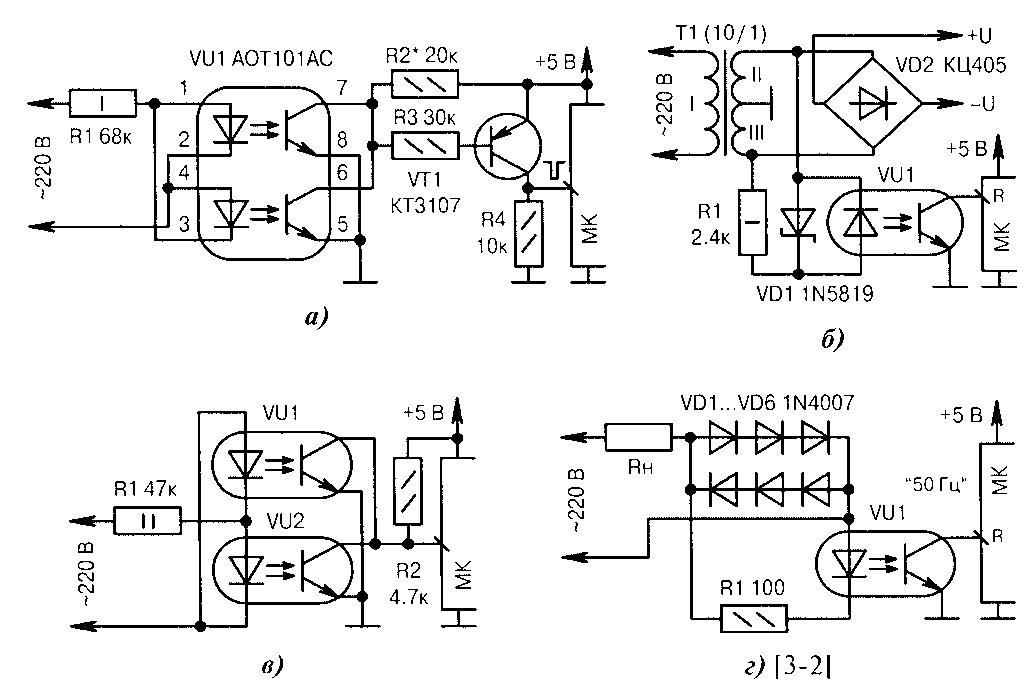
Драйверы, предназначенные для управления тиристорами и симисторами, выпускаются рядом фирм. Российским разработчикам хорошо известны микросхемы серии МОС30хх производства Motorola. Они изготовляются в малогабаритных корпусах,имеют оптическую развязку, для их включения требуется небольшое количество внешних компонентов. Схема подключения драйвера МОС30хх, управляемого током логического элемента D1, к симистору Th2 показана на рис. 1, а, акпаре тиристоров Th2 и Th3 — на рис. 1, б. Резисторы и конденсаторы, показанные на рисунке, предназначены для ограничения тока управления искорости нарастания напряжения dv/dt (снабберная цепочка RSCS ).
Рис. 1. Схемы подключения драйверов МОС30хх
Контроллеры SEMIKRON отличаются от аналогичных изделий тем, что они являются полностью законченными изделиями, предназначенными для управления тиристорами, соединенными в определенной конфигурации: полумостовой, мостовой, 3-фазной мостовой. Контроллеры SKHIT 01 представляют собой печатные платы, а драйверы серии SKPC и RT имеют модульное исполнение, причем конструктивно они согласованы с тиристорными модулями SEMIPACK (по подключению и установочным размерам), что обеспечивает простое и надежное соединение.
Контроллеры SKHIT 01 представляют собой печатные платы, а драйверы серии SKPC и RT имеют модульное исполнение, причем конструктивно они согласованы с тиристорными модулями SEMIPACK (по подключению и установочным размерам), что обеспечивает простое и надежное соединение.
SKHIT 01 — драйвер 3-фазного тиристорного моста
Драйвер SKHIT 01 предназначен для управления 3-фазным полууправляемым тиристорным мостом. Его структурная схема и схема подключения показаны на рис.2,а внешний вид — на рис.3. Как видно из рисунка, конструкция драйвера предусматривает его вертикальную установку на печатную плату при помощи пайки.
Основные технические характеристики драйвера SKHIT 01:
- максимальное входное напряжение — 530 В;
- выходной ток — 400 мА;
- питание — 15 В, 150 мА;
- ток управления — 10 мА;
- напряжение изоляции — 2500 В.
Одной из самых серьезных проблем, возникающих при включении мощного преобразовательного устройства, является ограничение тока заряда электролитических конденсаторов, подключенных после выпрямительного моста к шине питания. Большие пусковые токи не только перегружают питающую сеть и могут вызвать срабатывание защитных устройств, они еще и резко сокращают срок службы электролитических конденсаторов.
Большие пусковые токи не только перегружают питающую сеть и могут вызвать срабатывание защитных устройств, они еще и резко сокращают срок службы электролитических конденсаторов.
Рис. 2. Структурная схема (а) и схема подключения (b) драйвера SKHIT 01
Рис. 3. Внешний вид платы драйвера SKHIT 01
При невысоких мощностях нагрузки эта проблема обычно решается с помощью резистора «предварительного заряда» (precharge) и реле, замыкающего его после окончания процесса заряда. С увеличением мощности реализация такой схемы становится все более сложной, кроме того, надежность мощных контакторов сравнительно невелика, поэтому для заряда конденсаторов силовой шины питания обычно используются тиристорные выпрямители с фазовым управлением. Специально для обеспечения плавного заряда конденсаторов шины питания фирмой International Rectifier разработан интегральный драйвер IR1110 — контроллер «плавного запуска» (Soft Start Controller), упрощенная схема подключения которого приведена на рис. 4. Микросхема IR1110 выпускается в корпусе MQFP-64. Она способна управлять 3-фазным полууправляемым тиристорным мостом и обеспечивает следующие режимы работы:
4. Микросхема IR1110 выпускается в корпусе MQFP-64. Она способна управлять 3-фазным полууправляемым тиристорным мостом и обеспечивает следующие режимы работы:
- регулирование напряжения шины питания;
- возможность работы с однофазной и трехфазной сетью напряжением 115/230/380/460/575 В;
- возможность программирования характеристики нарастания напряжения;
- защита от короткого замыкания по шине питания;
- формирование сигнала неисправности.
SEMIKRON предлагает свой вариант решения задачи (см. рис. 2, б). После подачи питания происходит заряд конденсатора С через выпрямительные диоды D1 — D3 и резистор Rcharge. После окончания процесса заряда включается тиристорный выпрямитель Th2— Th4, управляемый драйвером SKHIT 01, и формируется сигнал, разрешающий подключение нагрузки. Преимуществом данной схемы является отсутствие прерывания тока тиристорами и, соответственно, низкий уровень излучаемых в сеть помех. Такая схема проще в реализации, а наличие трех дополнительных маломощных диодов практически не влияет на стоимость изделия. В отличие от схемы с контроллером IR1110, вслучае использования драйвера SKHIT01 требуется минимальное количество внешних элементов.
В отличие от схемы с контроллером IR1110, вслучае использования драйвера SKHIT01 требуется минимальное количество внешних элементов.
Рис. 4. Схема подключения (а) и внешний вид платы IRMDSS1 (б) с драйвером IR1110 и тиристорным выпрямителем
На рис. 2, а приведена структурная схема драйвера SKHIT 01. Десятичный счетчик (5), на вход которого поступают тактовые импульсы с генератора (4), формирует три импульсных, сдвинутых по фазе напряжения с частотой 10 кГц и коэффициентом заполнения около 0,1. Фазовый сдвиг импульсных последовательностей определяется сдвигом фаз питающего напряжения L1 — L3. Далее импульсы через компараторы-усилители (6) и ограничительные резисторы подаются на управляющие электроды тиристоров. Если напряжение, приложенное к тиристорам, отрицательно (линейное напряжение L1 — L3) или отсутствует сигнал разрешения (строб), то сигналы управления тиристорами не проходят.
Потенциал точки соединения катодов тиристоров (+UG) близок к выходному напряжению выпрямительного моста и не совпадает с потенциалом общего сигнального провода. Согласование потенциалов осуществляется с помощью гальванически изолированного DC/DC-конвертора (1). Для включения драйвера служит сигнал «строб», разрешающий или запрещающий прохождение управляющих импульсов на выход устройства.
Контроллеры управления тиристорными модулями SKPC
Контроллеры SKPC представляют новое поколение модулей управления SEMI-PCM (Semikron Power Control Modules), разработанных английским отделением фирмы SEMIKRON. Модули SKPC 100 предназначены для совместной работы с управляемыми тиристорными выпрямителями в 2 режимах: с контролем нулевого перехода (SKPC 100Z) и с непосредственным управлением фазным углом. Данные компоненты позволяют создавать твердотельные реле большой мощности для различных применений, где требуется коммутация переменного тока или управление мощностью нагрузки. Модули SKPC в первую очередь предназначены для применения в устройствах с большими значениями коммутируемых токов и индуктивным характером нагрузки.
Основные особенности контроллеров SKPC:
- уровень сигнала управления — TTL, CMOS;
- гальваническая изоляция сигнала управления;
- удовлетворяют требованиями стандартов UL, CSA, VDE;
- согласованы по установочным размерами подключению с тиристорными модулями SEMIPACK 1 — SEMIPACK 4.
Контроллер SKPC 200 предназначен для управления модулями тиристор/тиристор вразличных конфигурациях, его структурная схема и внешний вид показаны на рис.5 и 6. Нарис. 7 приведены варианты соединения тиристоров в модуле, с которыми может работать SKPC 200, — коммутатор переменного тока (7, а) и мостовые схемы (7, b и с). Основные особенности контроллера SKPC 200:
Таблица 1. Функциональное назначение модулей SKPC
Таблица 2. Основные технические характеристики контроллеров SKPC 100/200:
- встроенный трансформатор (Тр) источника питания может быть подключен к отдельной сети 220 В, что позволяет устройству использовать широкий диапазон напряжений;
- защита от короткого замыкания;
- встроенный операционный усилитель и источник опорного напряжения для выработки сигнала управления в замкнутой системе.
Рис. 5. Структурная схема SKPC 200
Рис. 6. Внешний вид модуля SKPC 200
Рис. 7. Конфигурации схем соединения тиристоров
На рис. 8 показан внешний вид модулей управления, разработанных и производимых испанским отделением SEMIKRON. Далее в тексте приведено краткое описание данных модулей.
Рис. 8. Внешний вид модулей для управления тиристорными мостами серий RT, МР, APTT
RT380M B2C — регулятор фазового угла для управления тиристорным мостом/полумостом в конфигурации В2С c контролем нулевого перехода
Область применения: регулировка освещения, температуры, скорости вращения двигателей постоянного тока, асинхронных двигателей, управление электрохимическими процессами.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- напряжение управления — 0…5/0…10 В;
- встроенный источник питания 5 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
RT380T — аналоговый контроллер 3-фазного тиристорного моста в конфигурациях В6С, B6HK, B6HKF
Область применения: регулировка мощности 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- работа на индуктивную нагрузку с =0,2;
- напряжение управления — 0…5/0…10 В;
- встроенный источник питания 5 В, 100 мА;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
MP380T — микропроцессорный контроллер 3-фазного тиристорного моста
Область применения: регулировка мощности 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В с автоматическим выбором диапазона;
- работа на индуктивную нагрузку с =0,2;
- напряжение управления — 0…5/0…10В, 0…20/4…20 мА;
- программируемый режим пуска и остановки;
- контроль обрыва фазы и правильности чередования фаз;
- защита от перегрева;
- режим ограничения тока нагрузки;
- напряжение изоляции — 4 кВ;
- управление от РС по протоколу RS485.
RT120MC — однофазный регулятор для управления АС-ключом (W1C) с обратной связью по току или напряжению
Область применения: стабилизация тока или напряжения нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 110/220/380 В;
- работа на индуктивную нагрузку с =0,2;
- напряжение управления — 0…5 В, 0…20 мА, 4…20 мА;
- программируемый режим плавного пуска/остановки;
- режим ограничения тока или стабилизации напряжения;
- напряжение изоляции — 4 кВ.
APTT840/841 — однофазный регулятор для управления АС-ключом (W1C) и полумостом (В2С) c контролем нулевого перехода (840) и без контроля (841)
Область применения: регулировка мощности однофазной нагрузки, коррекция коэффициента мощности.
Основные особенности:
- напряжение питания — 50/60 Гц, 220/380 В;
- напряжение управления — 12 В;
- напряжение изоляции — 4 кВ.
SKW3 ZC — контроллер для управления 3-фазным АС-коммутатором c контролем нулевого перехода
Область применения: коммутация 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 230/400 В;
- напряжение управления — 8…10 В;
- встроенный источник питания 12 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
SKTT6 — контроллер для управления 3-фазным АС коммутатором
Область применения: коммутация 3-фазной нагрузки.
Основные особенности:
- напряжение питания — 50/60 Гц, 230/400 В;
- напряжение управления — 6…30 В;
- встроенный источник питания 12 В;
- напряжение изоляции — 4 кВ;
- согласован по электрическим характеристикам и конструкции со всеми тиристорными модулями SEMIKRON.
Заключение
Фирма SEMIKRON стремится максимально обеспечить потребности потребителей полупроводниковых компонентов высокой мощности и необходимых им аксессуаров: теплоотводов, вентиляторов, снабберныx цепей, элементов для защиты полупроводников от переходных перенапряжений. Это позволяет разработчику выбрать все необходимые для решения задачи компоненты среди продукции одной фирмы.
Основная доля продукции SEMIKRON предназначена для создания мощных преобразовательных устройств: приводов, систем индукционного нагрева, сварочного оборудования и т. д. Одной из проблем, с которой неизбежно сталкивается разработчик данного оборудования, является плавная подача питания. Выпуск компонентов, позволяющих решить данную задачу, позволяет сократить стоимость разработки, повысить надежность работы изделия.
Тиристоры остаются элементами, достаточно широко применяемыми в технике, и наличие специализированных контроллеров для управления ими — одна из сильных сторон продукции SEMIKRON. На рис.9 приведены некоторые практические схемы, в которых могут быть использованы тиристоры, управляемые драйверами SEMIKRON: а— регулятор тока однофазной нагрузки, b— мостовой регулятор мощности нагрузки постоянного тока, с — коммутатор трехфазной нагрузки, d — система термостабилизации.
Рис. 9. Практические схемы включения контроллеров SKPC
На рис. 10 показано одно из готовых изделий серии SEMISTACK — сборка, содержащая полностью законченную конструкцию 3-фазного выпрямителя с модулями SEMIPACK SKKT 57/12, драйвером 3-фазного тиристорного моста RT390T, теплоотводом Р3/250, вентилятором SKF3-230 и разъемами для подключения силовых и контрольных цепей. Модуль разработан и изготовлен специально для обучения специалистов методам расчета и конструирования тиристорных преобразователей большой мощности.
Рис. 10. Демонстрационная сборка SEMITEACH с модулями SKКТ 57/12 и драйвером RT380T
Литература- SCR/Thyristor Trigger Module SKHIT 01. Semikron Elektronik GmbH.
- Thyristor Phase Angle Trigger Module SKPC 200. Semikron Elektronik GmbH.
- IRMDSS 1 — IR1110 Soft Start IC Reference Design Kit. International Rectifier Data Sheet No. PD60164.
- Thyristor Power Electronics Teaching System. Application Note.
Симисторный регулятор мощности с микроконтроллерным управлением / Хабр
Однажды для одного небольшого домашнего проекта мне потребовался регулятор мощности, пригодный для регулировки скорости вращения электромотора переменного тока. В качестве основы использовалась вот такая плата на базе микроконтроллера STM32F103RBT6. Плата была выбрана как имеющая честный RS232 интерфейс и имеющая при этом минимум дополнительных компонентов. На плате отсутствует слот под литиевую батарейку для питания часов, но приживить его — дело пятнадцати минут.Итак, начнём с теории. Все знакомы с так называемой широтно-импульсной модуляцией, позволяющей управлять током в (или, что реже, напряжением на) нагрузке с максимальным КПД. Лишняя мощность в таком случае просто не будет потребляться, вместо того, чтобы рассеиваться в виде тепла, как при линейном регулировании, представляющем собой не более чем усложнённый вариант реостата. Однако, по ряду причин такое управление, будучи выполненным «в лоб», не всегда подходит для переменного тока. Одна из них — бо́льшая схемотехническая сложность, поскольку требуется диодный мост для питания силовой части на MOSFET или IGBT транзисторах. Этих недостатков лишено симисторное управление, представляющее собой модификацию ШИМ.
Симистор (TRIAC в англоязычной литературе) — это полупроводниковый прибор, модификация тиристора, предназначенный для работы в качестве ключа, то есть он может быть либо открыт, либо закрыт и не имеет линейного режима работы. Основное отличие от тиристора — двусторонняя проводимость в открытом состоянии и (с некоторыми оговорками) независимость от полярности тока (тиристоры и симисторы управляются током, как и биполярные транзисторы) через управляющий электрод. Это позволяет легко использовать симистор в цепях переменного тока. Вторая особенность, общая с тиристорами, — это свойство сохранять проводимость при исчезновении управляющего тока. Закрывается симистор при отключении тока между основными электродами, то есть, когда переменный ток переходит через ноль. Побочным эффектом этого является уменьшение помех при отключении. Таким образом, для открывания симистора нам достаточно подать на управляющий электрод открывающий импульс небольшой, порядка десятков микросекунд, длительности, а закроется он сам в конце полупериода переменного тока.
Симисторное управление учитывает вышеперечисленные свойства этого прибора и заключается в отпирании симистора на каждом полупериоде переменного тока с постоянной задержкой относительно точки перехода через ноль. Таким образом, от каждого полупериода отрезается «ломтик». Заштрихованная на рисунке часть — результат этой процедуры. Таким образом, на выходе вместо синусоиды мы будем иметь что-то, в известной степени напоминающее пилу:
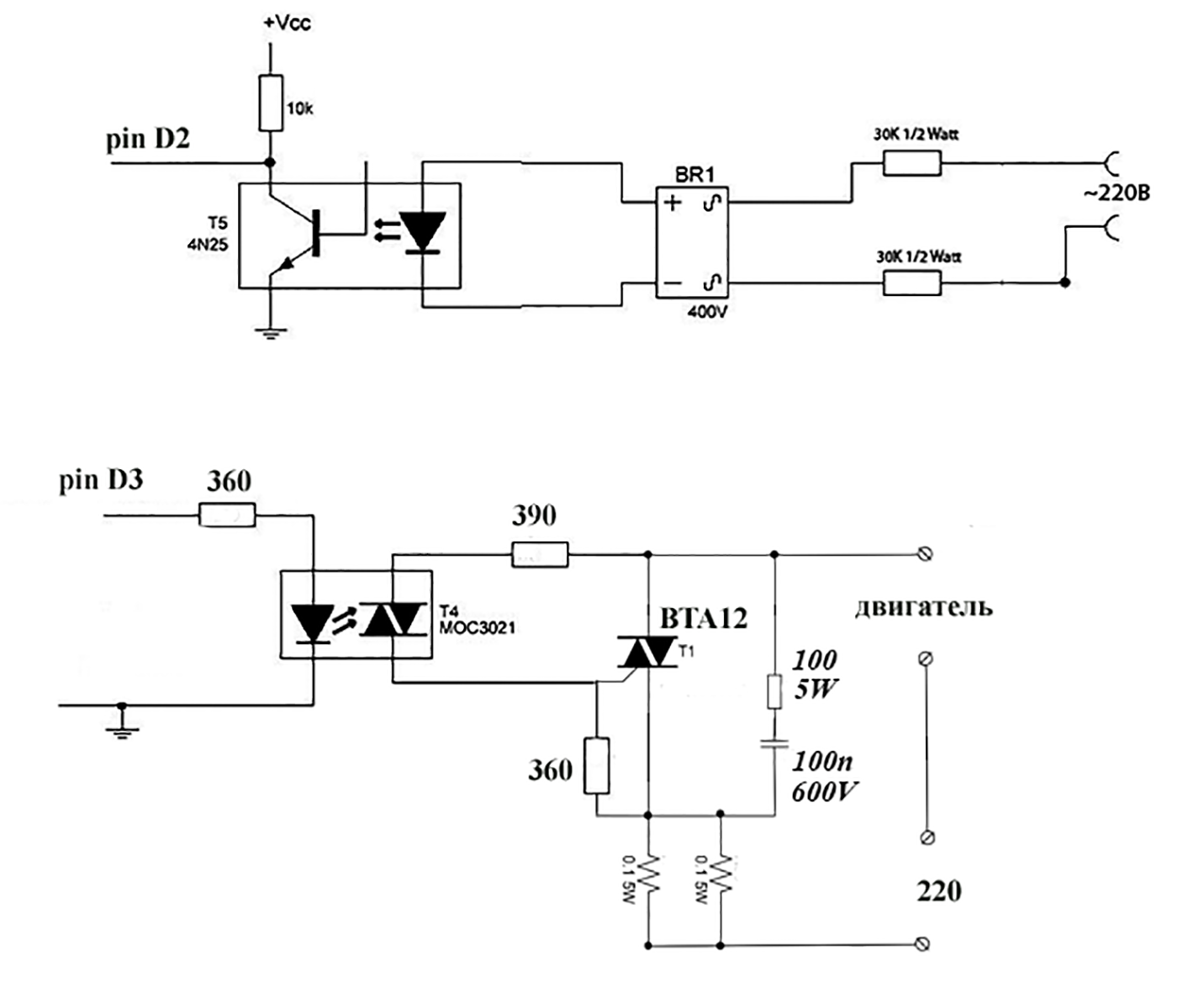
Теперь наша задача — вовремя отпирать симистор. Эту задачу мы возложим на микроконтроллер. Приведённая ниже схема является результатом анализа имеющихся решений а также документации к оптронам. В частности, силовая часть взята из документации на симисторный оптрон производства Texas Instruments. Схема не лишена недостатков, один из которых — мощный проволочный резистор-печка, через который включён оптрон, детектирующий переход через ноль.
Как это работает? Рассмотрим рисунок.
На положительном полупериоде, когда ток через оптрон превышает некоторое пороговое значение, оптрон открывается и напряжение на входе микроконтроллера опускается практически до нуля (кривая «ZC» на рисунке). Когда же ток снова опускается ниже этого значения, на микроконтроллер снова поступает единица. Происходит это в моменты времени, отстоящие на dz от нуля тока. Это dz ощутимо, в моём случае составляет около 0.8 мс, и его необходимо учитывать. Это несложно: мы знаем период T и длительность импульса высокого уровня h, откуда dz = (h — T / 2) / 2. Таким образом, нам необходимо открывать симистор через dz + dP от переднего фронта сигнала с оптрона.
О фазовом сдвиге dP стоит поговорить отдельно. В случае c ШИМ постоянного тока среднее значение тока на выходе будет линейно зависеть от скважности управляющего сигнала. Но это лишь потому, что интеграл от константы даёт линейную зависимость. В нашем случае необходимо отталкиваться от значения интеграла синуса. Решение простого уравнения даёт нам искомую зависимость: для линейного изменения среднего значения тока необходимо менять фазовый сдвиг по закону арккосинуса, для чего достаточно ввести в управляющую программу LUT таблицу.
Всё, о чём я расскажу в дальнейшем, имеет прямое отношение к архитектуре микроконтроллеров серии STM32, в частности, к архитектуре их таймеров. Микроконтроллеры этой серии имеют разное число таймеров, в STM32F103RBT6 их семь, из которых четыре пригодны для захвата и генерации ШИМ. Таймеры можно каскадировать: для каждого таймера одно из внутренних событий (переполнение, сброс, изменение уровня на одном из входных или выходных каналов и т.д.; за подробностями отсылаю вас к документации) можно объявить выходным и направить его на другой таймер, назначив на него определённое действие: старт, стоп, сброс и т.д. Нам потребуются три таймера: один из них, работая в т.н. PWM input режиме, замеряет период входного сигнала и длительность импульса высокого уровня. По окончании измерения, после каждого периода генерируется прерывание. Одновременно с этим запускается связанный с этим событием таймер фазового сдвига, работающий в ждущем режиме. По событию переполнения этого таймера происходит принудительный сброс таймера, генерирующего выходной управляющий сигнал на симистор, таким образом, через каждый полный период переменного тока подстраивается фаза управляющего сигнала. Только первый таймер генерирует прерывание, и задача обработчика сводится к подстройке фазового сдвига (регистр ARR ждущего таймера) и периода ШИМ таймера (также регистр ARR) так, чтобы он всегда был равен половине периода переменного тока. Таким образом, всё управление происходит на аппаратном уровне и влияние программных задержек полностью исключается. Да, это можно было сделать и программно, но грех было не воспользоваться такой возможностью, как каскадируемые таймеры.
Выкладывать на обозрение код всего проекта я не вижу смысла, к тому же, он далёк от завершения. Приведу лишь фрагмент, содержащий описанный выше алгоритм. Он абсолютно независим от прочих частей и легко может быть портирован в другой проект на совместимом микроконтроллере.
И напоследок, видеоролик, показывающий устройство в действии:
Модель микропроцессорного управления двигателем постоянного тока для приводов робототехнических систем Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
У УДК 621.865.8
Бахчаев Александр Сергеевич, студент Института кибернетики ТПУ.
E-mail:
[email protected] Область научных интересов: робототехнические комплексы. Михайлов Валерий Васильевич, канд. техн. наук, ст. науч. сотр., доцент кафедры интегрированных компьютерных систем управления Института кибернетики ТПУ. E-mail: [email protected] Область научных интересов: технические средства автоматизации.
МОДЕЛЬ МИКРОПРОЦЕССОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА ДЛЯ ПРИВОДОВ РОКОТОТЕХНИЧЕСКИХ СИСТЕМ
А.С. Бахчаев, В.В. Михайлов
Томский политехнический университет E-mail: [email protected]
Показана возможность разработки системного решения задачи управления двигателем постоянного тока при помощи микроконтроллера ATmega8 в диалоговом режиме с использованием человеко-машинного интерфейса.
Ключевые слова:
Блок питания, микроконтроллер, алгоритм управления, тиристорный преобразователь.
В статье представлено системное решение, и описан алгоритм, позволяющий управлять скоростью вращения двигателя постоянного тока (ДПТ) при помощи микроконтроллера типа ATmega8.
Схема управления двигателем состоит из трех основных частей: стабилизированный блок питания, реверсивный тиристорный преобразователь и микроконтроллер ATmega8 [1, 2].
Питание цифровых схем управления осуществляется постоянными напряжениями +5 В и +12 В. Для получения необходимых номиналов используется стабилизированный блок питания [3, 4]. Схема блока питания представлена на рис. 1.
S1
Т1
4 X КД102А
Рис. 1. Электрическая схема блока питания
Схема управления скоростью вращения двигателя представлена на рис. 2.
Кроме собственно цепей питания приведенная схема содержит специальные цепи, позволяющие получать сигнал, синхронный с частотой сетевого напряжения. Такой сигнал при подаче на компаратор, входящий в состав микроконтроллера, позволяет реализовать алгоритмы управления тиристорными ключами для плавной регулировки мощности на нагрузке.
Реверсивный тиристорный преобразователь используется для регулирования мощности ДПТ. Он представляет собой мостовую схему из восьми тиристоров, которая позволяет изменять скорость вращения ДПТ как в прямом, так и в обратном направлении.
Для управления тиристорами была выбрана схема фазового регулирования [5], при помощи которой выбирается момент открытия тиристора относительно начала фазы текущего полупериода питающего напряжения. То есть мы искусственно создаем задержку открытия тиристоров с целью понижения выходного напряжения, что в свою очередь приводит к снижению мощности ДПТ, а значит и к снижению частоты вращения двигателя. Этот процесс иллюстрирует рис. 3.
11
/___К
ч /
Мощность, близкая л минимальной
Рис. 3. Выбор момента открытия тиристора
На рис. 3 приведена форма сигнала на нагрузке при разных значениях времени задержки. При малом времени задержки 11 мощность максимальна. При 12 в нагрузку отдается ровно половина возможной мощности, а при 13 мощность минимальна.
Управляющая часть схемы состоит из микроконтроллера и персонального компьютера. Для управления двигателем был выбран микроконтроллер фирмы ЛТЫБЬ: ATmega8. По количеству портов ввода-вывода, а также по параметрам своей вычислительной мощности данный микроконтроллер подходит для схемы управления ДПТ. Схема микроконтроллера представлена на рис. 4.
Микроконтроллер необходим для исполнения следующих задач:
1. Фиксация времени начала нового полупериода. Фиксация происходит при помощи аналогового компаратора, который имеется в составе ATmega8.
2. Обеспечение заданной задержки. Для реализации заданной задержки используется внутренний таймер микроконтроллера.
3. Выдача управляющего импульса для открытия тиристорных преобразователей.
4. Прием данных от датчиков обратной связи и передача их на экран пользователя.
Персональный компьютер содержит в себе управляющую программу, при помощи которой
пользователь может управлять двигателем. Примерный вид интерфейса программы для ввода данных представлен на рис. 5.
Интерфейс содержит две кнопки для пуска и остановки двигателя, бегунок для изменения времени задержки открытия тиристорного преобразователя и кнопку для ввода информации о задержке в микроконтроллер. Также программа содержит информационное окно, в котором отображается информация с датчиков, а именно скорость вращения двигателя и ток якоря.
РРІР
(РЕБЕТ) РС6 С 1 28 □ РС5 (АОСб/БСЦ
(13X0) РОО С 2 27 □ РС4 (А0С4/Б0А)
(ТХЭ) Р01 С 3 26 □ РСЗ (АОСЗ)
(ІИТО) Р02 С 4 25 □ РС2 (А0С2)
(ІМТ1) РОЗ [I 5 24 □ РС1 (А0С1)
(ХСКЯО) Р04 С 6 23 □ РСО (АОСО)
УССС 7 22 НОШ
вше 8 21 □ АЯЕР
(ХТАИ/ТО8С1) РВ6 С 9 20 □ АУСС
(ХТА1.2/ТОБС2) РВ7 С 10 19 □ РВ5 (ЭСК)
(Т1) Р05 С 11 18 □ РВ4 (М1ЭО)
(АІІМ0) Р06 С 12 17 □ РВЗ (МОЗІ/ОС2)
(А1Ы1) Р07С 13 16 □ РВ2 (Эв/ОС 1 В)
(ІСР1) РВО С 14 15 □ РВ1 (ОС1А)
Рис. 4. Схема микроконтроллера AТmega8
12 3
Рис. 5. Интерфейс программы для ввода данных
При помощи персонального компьютера через управляющую программу вводится управляющая информация в контроллер, далее работа идёт в диалоговом режиме.
При работе в диалоговом режиме пользователь задает величину длительности задержки открытия тиристора. Введенная информация поступает в микроконтроллер. Дождавшись сигнала с компаратора о начале нового полупериода, контроллер запускает внутренний таймер (длительность работы таймера равна длительности задержки, заданной пользователем). По окончании работы таймера контроллер формирует управляющий сигнал, который через оптопару подается на управляющие входы тиристоров. Тиристоры открываются, и напряжение поступает на двигатель, тот в свою очередь начинает вращение. Как только сетевое напряжение достигнет нуля, тиристоры закроются, а с началом следующего полупериода процесс отсчета
времени повторится снова. Изменяя величину задержки, пользователь может изменять мощность, а значит и скорость вращения двигателя. Так же пользователь имеет возможность наблюдать за показателями работы двигателя, а именно за скоростью вращения двигателя и за током в обмотке якоря. Это позволяет удаленно следить за работой ДПТ.
СПИСОК ЛИТЕРАТУРЫ
1. Москаленко В.В. Электрический привод. — М.: Издательский центр «Академия», 2005. -368 с.
2. Терехов В.М., Осипов О.И. Системы управления электроприводов: учебник для высш. учеб. заведений. — М.: Издательский центр «Академия», 2005. — 304 с.
3. Розанов Ю.К. Силовая электроника. — М.: Издательский дом МЭИ, 2007. — 632 с.
4. Зиновьев Г.С. Основы силовой электроники. — Новосибирск: Изд-во НГТУ, 2003. — 523 с.
5. Денисенко В.В. Тиристоры: вопросы реализации // Современные технологии автоматизации. — 2008. — № 1. — С. 72-80.
Поступила 24.05.2012 г.
ЧАСТО ИСПОЛЬЗУЕМЫЕ СХЕМЫ ПРИ ПРИМЕНЕНИИ МИКРОКОНТРОЛЛЕРОВ.
1. СХЕМЫ УПРАВЛЕНИЯ СВЕТОДИОДАМИ.
1.1. Схема , использующая напряжение на выводе микроконтроллера.
В этой схеме резистор R предназначен для ограничения тока в светодиоде HL до допустимого уровня. При логическом «0» на выводе светодиод не светится, а (при логической «1» на выводе) светодиод светится. В зависимости от программы(записанной в микроконтроллер) возможны различные режимы управления светодиодом : постоянного свечения светодиода, мигающего свечения светодиода .
1.2. Схема с возможностью увеличения тока , когда величины тока с вывода микроконтроллера RA 1 недостаточно для зажигания светодиода HL0. Схема использует в качестве усилителя транзистор VT1 , работающий в ключевом режиме.
Величина резистора R1 должна обеспечивать режим насыщения транзистора во включённом состоянии. Резистор R2 задаёт величину тока, необходимую для нормального свечения светодиода.
2. Схема подключения динамика.
Конденсатор C не пропускает постоянный ток в динамик ,но пропускает переменный сигнал. Частота переменного сигнала выбирается в диапазоне частот слышимых человеческим ухом. Под управлением программы микроконтроллер генерирует на выводе RА1 прямоугольные однополярные импульсы, имеющие амплитуду около 5 В. Звук динамика может быть непрерывным , или прерывистым (зависит от программы). Для мощного громкоговорителя или сирены используется усилитель.
3. Схема подключения реле.
Диод VD1 уменьшает ток с обмотки реле при отключении. На обмотке реле К1 может возникнуть напряжение опасное по уровню для МОП – структуры вывода RА1. При логической «1» ( около 5 В) реле срабатывает, замыкая контакт К1. Реле находится в сработанном состоянии, пока микроконтроллер не установит на выводе RА1 напряжение около «0» логический «0». Рабочий ток обмотки реле должен быть допустимым для вывода RА1. Если требуется для реле больший ток ,то применяется транзисторный ключ между микроконтроллером и реле. Если нужно управлять группой реле ,то часто для управления используют такую схему :
В схеме используется интегральный усилитель ULN 2803.
4. Схема управления нагрузкой в цепи постоянного тока.
Оптопары DD1 и DD2 гальванически развязывают микроконтроллер и цепь питания нагрузки. Управление нагрузкой в цепи постоянного тока осуществляет тиристор. Открываются тиристор с помощью управляющего электрода. С вывода микроконтроллера RB1 производится открытие тиристора VT1, а с RB2 — закрытие. Последовательность действий на выводах микроконтроллера (выше приведенной схемы) для управления нагрузкой:
Импульс на выводе RB1 в момент времени t1 открывает тиристор VT1 и в нагрузке появляется ток IH (лампа L светится). Импульс на выводе RB2 через оптопару DD2 открывает транзистор VT2 (шунтируя тиристор). Тиристор закрывается и после закрытия транзистора VT2 в момент t2 , в нагрузке ток становится равным нулю. Стабилитрон VD ограничивает напряжение на оптопарах до допустимого уровня, а цепочка R7–C уменьшает крутизну изменения напряжения на тиристоре ( предотвращая ложное открытие тиристора).
5. Схема управления нагрузкой в цепи переменного тока.
Для управления нагрузкой при переменном токе используются симисторы.
Импульс на выводе микроконтроллера RB1 открывает симистор оптопары DD, который открывает симистор VT. Если на выводе RB1 будет постоянное напряжение близкое к 5 В (логическая 1) , то симисторы будут открываться в начале каждой половины напряжения сети. При наличии на выходе RB1 коротких импульсов их надо синхронизировать с напряжением сети (особенность работы тиристоров) в сети переменного тока.
6. Схема управления цифровым 7– сегментным индикатором.
На схеме семь одиночных светодиодов (7-сегментного индикатора) катодами подключены к минусу источника питания .Это схема с общим катодом. Используется семь выводов микроконтроллера (RB1-RB7) для управления каждым сегментом индикатора. Программа микроконтроллера отправляет код цифры в порт.
Индикатор можно использовать и для отображения некоторых букв : d,b,c,o,P,C,E формируя для этого нужные коды.
7. Схема управляющая АЦП (аналого-цифровым преобразователем).
Напряжение имеют аналоговую форму (0-5 В), которое нужно преобразовать в цифровой код. Показана схема управления АЦП типа ADC0831 с последовательным интерфейсом.
Измеряемая величина, поступает на вход V in . С последовательного выхода передается цифровой код измеренной величины. Управляется АЦП по трем линиям:
CLK – передача тактовых импульсов от микроконтроллера к АЦП;
DO – передача цифрового значения измеряемой величины (цифровой код с выхода DO передаётся в микроконтроллер, начиная со старшего разряда.)
cs – разрешить АЦП работать (выбор кристалла).
Масштаб преобразований зависит от величины опорного напряжения Vref . Выходной код АЦП (ADC 0831) равен (0- 255) , для измеряемой величины в 5В этот код будет 255.
8. Схема управляющая шаговым двигателем.
Наиболее распространены униполярные двигатели с четырьмя обмотками на статоре (к обмоткам прикладывается напряжение одной полярности). Для проворачивания ротора на обмотки двигателя подаётся последовательность упорядоченных импульсов. Ротор вращается не непрерывно, а скачками на единицу углового перемещения. Применяется микросхема ULN 2003.
Последовательность импульсов (подаваемая на обмотки) согласно таблице ( от шага 1 к шагу 4) — вращение в одну сторону. Если подавать импульсы (от шага 4 к шагу 1), то будет вращение в противоположную сторону.
9. Схема управляющая жидко- кристаллическим индикатором (ЖКИ).
Жидко – кристаллический индикатор (ЖКИ) имеет встроенный контроллер и генератор символов. ЖКИ находится в режиме записи (R/W=0). Вывод V0 используется для управления контрастностью отображения на экране. При V0=0 контрастность максимальна. Микроконтроллер ,через RS ввод ЖКИ, сообщает какую информацию он передаёт (коды символов или коды команд). На вход E микроконтроллер подаёт разрешение ЖКИ — работать. Коды команд и символов передаются по 4 –м линиям на входы ЖКИ (DB4-DB7). Вначале производится инициализации . Затем производится переход из 8 –битового режима в 4 –битовый режим. После этого подаётся разрешающий сигнал на вход E.
10. Схема управления термодатчиком для контроля температуры.
Используется однопроводной интерфейс (1 –Wire Bus) для передачи данных (по одной линии). Датчик измеряет температуру от -55 до 125. Информация о температуре выдаётся 9 –битовым кодом. Принцип работы термодатчика основан на сравнении частот двух внутренних генераторов. Один генератор выдаёт постоянную частоту независимо от температуры, а частота второго генератора изменяется в зависимости от температуры корпуса термодатчика. Для управления датчиком используется команды (определения числа и типов термодатчиков, генерация в линию идентификационного номера, подтверждение выбора определенного датчика, начало преобразования температуры, запись результата, питание от линии). Передача данных по однопроводной линии выполняется паузами различной длительности. Если пауза до 15 мкс, то это логическая «1», а если пауза длиннее 15 мкс, но меньше 60 мкс, то это логический «0». Обнуление линии осуществляется паузой в 480-960 мкс.
Электронный ключ.
Электронные ключи DC/AC.
В основе устройства N-канальные полевые транзисторы либо IGBT.
Выполнена гальваническая развязка между цепями управления и силовой частью.
Реализована работа N-канальных транзисторов в верхнем ключе до 2KV.
Возможно использование ключей для коммутации цепей переменного тока.
Инверсия входного сигнала.
Регулируемая задержка переднего фронта входного сигнала.
Генерация импульса заданной длительности по переднему фронту сигнала.
Предусмотрено подключение внешних IGBT сборок или транзисторов.
Заземление схемы выполняется через крепёжные отверстия.
Предусмотрено подключение внешних радиаторов.
Через разъём IDC 10 предусмотрено подключение микроконтроллера.
Электронные ключи Вы можете изготовить самостоятельно, используя схему и печатную плату проекта в altium по данной ссылке или закажите готовое изделие. Если используете данную схему в разработках указывайте ссылки на первоисточник. В архиве gerbers.zip находятся файлы с трассировкой печатной платы. Данный файл подготовлен для размещения на https://www.pcbway.ru/ по расценкам 5USD за 10 штук.
Противопоказаний использовать в верхнем ключе транзисторы N-типа не существует. Но Вы должны обеспечить чтобы напряжение срабатывания на затворе было выше напряжения на стоке. Как правило за Вас эту работу делает драйвер верхнего ключа.
Питание драйвера TC4452 выполнено от преобразователя с гальванической развязкой от исходного напряжения. «Минус» полученного напряжения 12 вольт соединён с истоком транзистора через резистор с нулевым сопротивлением по схеме. В результате на затворе управляющее напряжение будет всегда выше напряжения стока, это значит, что в процессе работы транзистор будет открыт либо закрыт полностью.
В итоге Вы получаете драйвер верхнего ключа на транзисторе N-типа использование которого ограничено напряжением гальванической изоляции преобразователя. Преимуществом является более высокое быстродействие транзисторов N-типа и низкое сопротивление канала сток-исток чему у аналогичных транзистороы P-типа.
Электронные ключи Вы можете изготовить самостоятельно, используя схему и печатную плату, загрузив проект altium по данной ссылке или закажите готовое изделие. Если используете данную схему в разработках указывайте ссылки на первоисточник.
Если у Вас нет необходимости работать с цепями переменного тока и перед Вами не стоит задача предотвратить возврат ОЭДС в истчник питания, один транзистор можно не ставить. В этом случае выходы на плате исток и сток транзистора следует перемкнуть перемычкой.
Драйвер управления тиристорами и транзисторами.
Данная схема является продолжением работы над драйвером управления транзисторами и дополнена функционалом необходимым для включения и выключения тиристоров в цепях постоянного и переменного тока без привзяки к фазе питающего напряжения. Схема и разводка печатной платы доступна по данной ссылке .
Принципиальная схема.
В основе устройства N-канальные полевые транзисторы либо IGBT.
Выполнена гальваническая развязка между цепями управления и силовой частью.
Установлен разъём IDC10 для подключения к микроконтроллеру. Выбор порта осуществляется установкой соответсвующей перемычки.
Реализована работа N-канальных транзисторов в верхнем ключе до 2KV.
Возможно использование ключей для коммутации цепей переменного тока.
Предусмотрено подключение внешних IGBT сборок или транзисторов.
Инверсия входного сигнала.
Регулируемая задержка переднего фронта сигнала.
По переднему фронту формируется импульс заданной длительности.
Генерация коротких импульсов с настраиваемыми длительностью импульса и паузами между ними.
Управление тиристорами.
Использование тиристоров в качестве ключей позволяет управлять силовой нагрузкой значительной мощности, превосходящей возможности большинства транзисторов. Для использования тиристоров в качестве силовых ключей в цепях постоянного и переменного тока прорабатывается схемотехника управления тиристорами.
Если замкнуть катод и анод тиристора, то ток идущий через тиристор снижается до величины меньшей Iвыкл, в результате тиристор закроется. Если снять напряжение с управляющего электрода тиристора, замкнуть ключ соединяющий анод и катод, то после размыкания ключа тиристор будет заперт, ток через него течь не будет.
По спаду управляющего сигнала, формируется импульс запирающий тиристор через замыкание катода и анода тиристора — красный луч. Замыкание анода и катода реализовано через транзисторную пару включенную по схеме нечувствительной к полярности источника питания нагрузки.
На осциллограмме ниже показано как соотносится изменение напряжения на нагрузке - синий луч, к управляющему сигналу — жёлтый луч. Сигнал закрытия транзистора формируется по спаду управляющего сигнала, на осциллограмме курсором показано время в течение которого должен быть замкнут катод и анод тиристора для гарантированного закрытия тиристора. Соответственно схема формирующая управляющий сигнал должна учитывать это время.
Тиристор допускает прохождение тока только в одном направлении, поэтому для работы в цепи переменного тока требуется два тиристора включенных встречно.
Включение тириситора осуществлялось подачей напряжения на его управляющий электрод с импульсного трансформатора B82804A0264A210. При длительности импульса более пятнадцати микросекунд данный импульсный трансформатор греется и после выходит из строя.
По итогам тестирования индуктивных нагрузок в резонансе времени включения в 10 мкс недостаточно, поэтому в итоговой версии драйвера было принято решение вместо импульсного трансформатора использовать ферритовое кольцо с намотанными на нем 50 витками провода UTP с размещением его непосредственно на управляющем электроде тиристора.
Данная техника работы с тиристорами на стадии тестирования, поэтому для полноценной работы с тиристорами требуется две схемы драйвера. Первый на включение с формированием импульса по переднему фронту на включение и второй с генерацией аналогичного импульса инвертированного входного сигнала на выключение. Установка транзисторов на включение через импульсный трансформатор не требуется. Достаточно токов драйвера.
На видео демонстрируется работоспособность схемы в цепи постоянного тока — включение и выключение лампы накаливания 12V и управление нагрузкой в сети 220V с переменным напряжением. На частотах вплоть до 20кГц и работе на нагрузку в 150 ватт нагрев силовых электронных компонентов отсутствует.
Заметки на будущее:
В случае ёмкостной или активной нагрузки рассматриваемая схемотехника включения и выключения тиристоров работает идеально. С индуктивной нагрузкой, если та ещё и в резонансе — сложности. Трудно добиться стабильной работы. Частично помогает снаббер. Гарантированному включению тиристора способствует генерация коротких импульсов. Но в любом случае нужна обратная связь.
Радует что при ошибках оператора вылетают пробки, а не полупроводниковый прибор как это гарантированно случается с транзисторами не зависимо от цены.
Универсальные электронные ключи DC/AC.
В основе устройства N-канальные полевые транзисторы либо IGBT.
Выполнена гальваническая развязка между цепями управления и силовой частью.
Реализована работа N-канальных транзисторов в верхнем ключе до 2KV.
Возможно использование ключей для коммутации цепей переменного тока.
Предусмотрено подключение внешних IGBT сборок или транзисторов.
Заземление схемы выполняется через крепёжные отверстия.
Возможно подключение внешних радиаторов.
Плата 85*42мм на двустороннем текстолите FR4 2мм, толщина фольги 105 мкм.
Электронные ключи Вы можете изготовить самостоятельно, используя схему и печатную плату, загрузив проект diptrace по данной ссылке или закажите готовое изделие. Если используете данную схему в разработках указывайте ссылки на первоисточник.
Противопоказаний использовать в верхнем ключе транзисторы N-типа не существует. Но Вы должны обеспечить чтобы напряжение срабатывания на затворе было выше напряжения на стоке. Как правило за Вас эту работу делает драйвер верхнего ключа.
Питание драйвера TC4452 выполнено от преобразователя с гальванической развязкой от исходного напряжения. «Минус» полученного напряжения 12 вольт соединён с истоком транзистора через резистор с нулевым сопротивлением по схеме. В результате на затворе управляющее напряжение будет всегда выше напряжения стока, это значит, что в процессе работы транзистор будет открыт либо закрыт полностью.
В итоге Вы получаете драйвер верхнего ключа на транзисторе N-типа использование которого ограничено напряжением гальванической изоляции преобразователя. Преимуществом является более высокое быстродействие транзисторов N-типа и низкое сопротивление канала сток-исток чему у аналогичных транзистороы P-типа.
Для приложений может быть критична задержка в распространении сигнала. На осциллограмме далее показана задержка между сигналом с генератора на входе схемы (жёлтый луч) и затвором транзистора (синий луч). Задержка формируется оптроном ACPL-W70L-000E и драйвером управления транзистором TC4452VAT и составляет около 100ns.
В демонстрационном видеоролике показана работа схемы в управлении транзисторными модулями BSM100GB60DLC в цепи переменного тока 220V, но требуется дополнительная установка параллельно внутренним диодам транзисторов внешних, соответсвующей мощности.
Если у Вас нет необходимости работать с цепями переменного тока и перед Вами не стоит задача предотвратить возврат ОЭДС в истчник питания, один транзистор можно не ставить. В этом случае выходы на плате исток и сток транзистора следует перемкнуть перемычкой.
Управление мощностью переменного токас тиристором с помощью микроконтроллера pic
Управление мощностью переменного токас помощью тиристора с использованием микроконтроллера pic предназначено для управления потоком мощности переменного тока через нагрузку. Этот проект разработан с использованием микроконтроллера PIC16F877A и схемы обнаружения пересечения нуля. Для регулирования мощности переменного тока с помощью тиристора используется метод контроля фазового угла. Тиристор используется как переключатель для управления потоком энергии. Микроконтроллер PIC16F877A используется для обнаружения пересечения нуля и генерации импульсных сигналов под определенным углом для тиристора.
Регулятор мощности переменного тока с тиристором
Начнем с базового понимания управления мощностью переменного тока с помощью тиритора. Например, если нагрузка подключена к источнику переменного тока через переключатель, как показано на рисунке ниже. Симистор используется как переключатель. Симистор — это разновидность тирситора. В симисторе два встречных тиристора соединены друг с другом.
Поток мощности переменного тока на нагрузку можно контролировать, управляя среднеквадратичным значением напряжения, возникающего на нагрузке, как показано на рисунке выше.Этот метод также называется методом регулятора напряжения переменного тока. В контроллере переменного напряжения среднеквадратичное значение напряжения, возникающего на нагрузке, регулируется путем изменения угла срабатывания сигнала затвора симистора, как показано на рисунке выше. Как вы знаете мощность в цепях переменного тока, мощность (активная мощность) рассчитывается по следующей формуле:
P = V × I × cos (θ), где cos (θ) — коэффициент мощности
Чтобы упростить этот проект, мы использовали только резистивную нагрузку. Внеся небольшие изменения в код, вы также можете использовать его с индуктивными нагрузками.В резистивных нагрузках коэффициент мощности всегда равен единице. Итак, cos (θ) = 1 и приведенная выше формула становится:
P = V × I = V × V / R = V² / R
P = V² / R
Итак, согласно приведенной выше формуле мощность нагрузки прямо пропорциональна квадрату напряжения. Регулируя напряжение на нагрузке, можно также рассчитать мощность. Как я уже упоминал ранее, контроллеры напряжения переменного тока используются для управления среднеквадратичным значением напряжения на нагрузках. Цепи регулятора напряжения переменного тока находят множество применений в промышленности, например переключатели ответвлений в трансформаторах, индукционный нагрев, регулирование скорости асинхронного двигателя и управление освещением.
Типы регуляторов переменного напряжения
Для регулирования мощности переменного тока с помощью тиристора используются два типа регуляторов напряжения переменного тока. Краткое объяснение обоих из них дано ниже:
- Управление модуляцией с пропуском импульсов: В этом методе нагрузка подключается к источнику переменного тока на несколько циклов, а затем питание отключается на несколько циклов. Электропитание переменного тока контролируется регулированием угла зажигания тиристора.
- Управление фазовым углом: В методе управления фазовым углом нагрузки подключаются к источнику переменного тока для определенной части положительного и отрицательного цикла.Конкретная часть зависит от угла зажигания тиристора.
В проекте управления мощностью переменного тока с помощью тиристоров метод управления фазовым углом используется для управления потоком мощности через нагрузку путем управления напряжением.
Принципиальная схема регулирования мощности переменного тока с тиристором
Принципиальная схема управления мощностью переменного тока с тиристором с помощью микроконтроллера pic. Я также сделал необходимые комментарии к рисунку.
Микроконтроллер
PIC16F877A используется для обнаружения перехода переменного напряжения через ноль, а микроконтроллер PIC16F877A генерирует импульс для симистора с определенной задержкой после обнаружения пересечения нуля.Я также опубликовал статью об обнаружении пересечения нуля с помощью микроконтроллера PIC16F877A. Для получения дополнительных сведений об обнаружении пересечения нуля ознакомьтесь со следующей статьей:
Обнаружение пересечения нуля с помощью микроконтроллера pic
В этом проекте я использовал задержку 2 мс. Что это значит? Это означает, что микроконтроллер будет генерировать импульс после обнаружения пересечения нуля с задержкой 2 мс. Вы можете настроить задержку, вручную введя ее значение в коде, или вы также можете использовать переменный резистор для регулировки значения задержки с помощью аналого-цифрового преобразователя микроконтроллера PIC16F877A.Приведенная выше принципиальная схема управления мощностью переменного тока с тирситором не требует слишком большого количества научных исследований. Сначала микроконтроллер проверяет обнаружение пересечения нуля, а затем срабатывает угол симистора с задержкой 2 мс после обнаружения пересечения нуля.
Управление мощностью переменного тока с тиристорной программой
Код проекта контроллера питания переменного тока написан с использованием компилятора Mikro C. Просто поместите этот код в компилятор mikro C после создания нового проекта. В этом проекте используется Crsytal 11,059 МГц.
Необходимые комментарии также сделаны в приведенном выше коде.Код для управления питанием переменного тока не требует пояснений, но если вы все еще чувствуете какую-либо проблему, не стесняйтесь комментировать этот пост со своими проблемами.
Регулируемый угол зажиганиятиристора с помощью Arduino
Регулируемый угол включения тиристора с помощью Arduino. Привет всем, этот проект посвящен регулированию регулируемого угла включения триака или тиристора с помощью Arduino Uno. В этом проекте мы разработали принципиальную схему для управления фазовым углом тиристора в течение полной синусоидальной волны или полного цикла переменного тока как для отрицательного, так и для положительного полупериода.Этот проект имеет множество применений, таких как регулирование мощности переменного тока с помощью тиристора и регулирование скорости однофазного асинхронного двигателя. Я уже публиковал статью о схеме управления углом включения тиристора с использованием компонентов аналоговой электроники. Но в этом проекте я создал регулируемый угол открытия с помощью компонентов цифровой электроники, таких как Arduino. Итак, теперь давайте начнем с базового введения всех компонентов, которые используются в этом регулируемом фазовом управлении тиристором с помощью Arduino.
Компоненты, используемые в регулируемом угле включения тиристора
Ниже приведены основные компоненты, используемые в этом проекте.
- Схема обнаружения пересечения нуля
- Bride выпрямитель: используется для преобразования отрицательного полупериода в положительный полупериод.
- резисторы
- 4N25 оптрон
- диоды
- Тиристор
- Ардуино Уно R3 Переменный резистор
- : используется для управления временем угла зажигания.
Схема обнаружения пересечения нуля
Принципиальная схема цепи обнаружения перехода через ноль показана ниже. Схема перехода через ноль используется для обнаружения перехода цикла переменного тока через нуль после каждого полупериода. Потому что мы хотим контролировать фазовый угол как для положительного, так и для отрицательного полупериода. Длина запускающего импульса должна быть одинаковой как для положительного, так и для отрицательного полупериода. Таким образом, схема детектора перехода через ноль должна разработать регулируемое управление углом включения тиристора с использованием Arduino.Оптопара 4N25 используется для изоляции между напряжением на стороне высокого и низкого напряжения, а также помогает обнаруживать переход через ноль. Выходной сигнал перехода через ноль D2 будет подан на Arduino.
Принципиальная схема управления регулируемым углом зажигания тиристора с помощью Arduino
- Полная принципиальная схема управления регулируемым углом зажигания тиристора с использованием Arduino показана ниже.
- На этой принципиальной схеме переменный резистор соединен с нулевым аналоговым каналом Arduino.
- Переменный резистор используется для регулировки угла включения тиристора или симистора.
- MOC3021 — это тиристорный или симисторный драйвер с оптической развязкой.
- Вход на MOC3021 — это импульс включения тиристора, который используется для включения и выключения тиристора.
- На выходе 220V AC лампа используется последовательно от источника переменного тока.
- Когда тиристор выключен, лампа не горит, а когда тиристор включен, лампа также горит.
- Таким образом, мощность на лампе зависит от времени работы тиристора, которое в конечном итоге зависит от угла зажигания тиристора
- Таким образом, выходная мощность лампы зависит от угла включения симистора или тиристора.
- Чем больше угол зажигания, тем меньше будет напряжение или мощность на лампе, как вы можете видеть на этом рисунке.
- Таким образом, угол зажигания — это, по сути, эталон, при котором тиристор включается. Если тиристор включается поздно, на устройстве будет меньше напряжения и, следовательно, меньше мощности.
- Для получения дополнительной информации посмотрите это видео
Купить код и моделирование
Вы также можете проверить другие похожие статьи:
CN-6 Управление симистором с использованием семейства микроконтроллеров COP400
% PDF-1.4 % 1 0 obj> поток application / pdfCN-6 Управление симистором с использованием семейства микроконтроллеров COP400
Привод / работа и управление нагрузками большой мощности с помощью микроконтроллеров
Иногда мы хотим управлять большими нагрузками с помощью микроконтроллеров.Под большими нагрузками я подразумеваю двигатели, вентиляторы, блоки переменного тока, лампы и другие источники высокого напряжения и тока. Поскольку все мы знаем, что микроконтроллеры могут выводить / подавать напряжение от +3,3 до +5 вольт и от 25 мА до 40 мА через свои контакты ввода / вывода. Этого напряжения и тока недостаточно для управления двигателями с большой мощностью, вентиляторами, лампочками и т. Д. Существует несколько методов и электронных компонентов, которые могут выдерживать гораздо большие нагрузки (токи / напряжения). Мы можем сопрягать эти компоненты с микроконтроллерами и управлять нагрузками большой мощности.В этом руководстве я расскажу об этих методах и об электронных компонентах, которые могут взаимодействовать с микроконтроллерами для работы с большими (ток-напряжение) нагрузками.
Методы / методы управления большими нагрузками с помощью микроконтроллеров
Мы можем использовать следующие электронные компоненты для управления нагрузками большой мощности с микроконтроллерами.- Транзисторы
- оптрон
- Реле
- Мосфетс
- SSR (твердотельное реле)
Верхний список начинается от электронного компонента управления малой мощностью (транзистор) до управления высокой мощностью (твердотельное реле SSR).Эти электронные компоненты могут взаимодействовать с микроконтроллерами любого производителя Altera, Atmel, Cypress Semiconductor, Maxim Integrated, EPSON Semiconductor, Freescale Semiconductor, Infineon, Intel, Microchip Technology, National Semiconductor, NXP Semiconductors, Panasonic, Parallax, Silicon Laboratories, Silicon Motion, Sony, STMicroelectronics, Texas Instruments, Toshiba. Я связал вышеуказанные компоненты во многих схемах с различными микроконтроллерами, например, Arduino, Pic, Stm32, 8051, Picaxe, Avr, Atmega, Arm и LPC и т. Д. Для управления мощными нагрузками.Вышеупомянутые компоненты могут использоваться с мини-компьютерами или платами для разработки, такими как платы BeagleBone, Raspberry Pi, Olimex и Xilinx FPGA.
Управление большими нагрузками с помощью микроконтроллеров и транзисторов.
Транзистор — это полупроводниковое устройство, используемое для переключения и усиления электронного сигнала и электронной энергии. Он имеет три терминала: База, Эмиттер и Коллектор. Небольшое напряжение, приложенное к базе, заставляет ток течь от коллектора к эмиттеру (npn) или от эмиттера к коллектору (pnp).Это два распространенных типа транзисторов PNP и NPN. В этом руководстве не рассматриваются электронные компоненты, а только показан метод, с помощью которого мы можем контролировать большие нагрузки.
|
Транзистор для управления большой нагрузкой с микроконтроллером |
Обычно транзистор может выдерживать токи до 600 миллиампер и напряжение до 20 вольт. Рейтинги могут быть немного высокими или низкими. Максимальная мощность, с которой может работать транзистор, составляет от 12 до 18 Вт.Этой мощности достаточно для управления нагрузками, мощность которых падает ниже 18 Вт, такими как игрушечные двигатели постоянного тока, лампочки постоянного тока и т. Д. Но все же этой мощности недостаточно для управления нагрузками, которые потребляют постоянный ток в 1 ампер.
|
Транзисторы могут быть скомпонованы вместе для получения высокого усиления по току. Самая популярная конфигурация — это конфигурация Дарлингтона, в которой высокий коэффициент усиления по току достигается за счет небольшого переключателя напряжения. На рынке доступно множество коммерческих микросхем, которые содержат встроенные в них транзисторы. Такие как ULN2003 и ULN2803 содержат массив транзисторов Дарлингтона в стороне от них.
|
Конфигурация схемы Дарлингтона и вывод микросхемы ULN2003 показаны с правой стороны.ULN2003 содержит 7 конфигураций Дарлингтона сбоку. Его легко использовать IC вместо того, чтобы создавать конфигурацию Дарлингтона самостоятельно. Ic занимает меньше места и требует меньше подключений. |
Конфигурация Дарлингтона в ULN2803 |
Можно сделать гораздо больше конфигураций с использованием транзисторов для усиления тока. Но для этого урока лучше всего подходит Дарлингтон. ULN2003 может управлять током 500 мА при 50 вольт. Таким образом, конфигурация Дарлингтона увеличивает мощность до 25 Вт.
Некоторые проекты, которые я создал с использованием транзисторов и микроконтроллеров для управления нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и оптопары.
Оптопара / оптоизолятор или оптопара — это электронный компонент, который отделяет две цепи друг от друга с использованием света в качестве среды. Две цепи независимы, но могут управляться источником света. Небольшое напряжение, приложенное к одной стороне, активирует другую цепь.Оптопара состоит из светодиодного диода и фотоэлемента. Когда на светодиодный диод подается напряжение, он загорается, и свет падает на фотоэлемент. Сопротивление фотоэлемента уменьшается при получении света, поэтому он начинает проводить.
|
Оптопара для управления большими нагрузками с микроконтроллером |
Слева показана общая схема оптопары с подключениями к микроконтроллеру. Мотор управляется микроконтроллером. Оптроны используются во многих схемах для изоляции одной цепи от другой.Таким образом исключается опасность высоких шипов. Если у них высокий пик, он только снесет оптопару, в оставшейся цепи останется в безопасности. Обычно он используется в высокоценных сердечниках схем. Чтобы изолировать их с помощью цепей регулирования высокого тока.
Оптопары могут выдерживать большую мощность, чем транзисторы. Например, оптопара FOD3180, которая может выдерживать непрерывный ток 2 А и напряжение от 10 до 20 вольт. Оптопары постоянного тока могут управлять мощностью от 40 до 60 Вт. В отличие от транзисторов, которые не используются при коммутации нагрузок переменного тока.Оптопары могут использоваться для управления тяжелыми нагрузками переменного тока. Это будет обсуждаться в теме SSR (твердотельные реле). |
Некоторые проекты, которые я создал, используя оптопары и микроконтроллеры для управления нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и реле.
Распиновка реле
Реле — это механические переключатели, которые размыкаются и замыкаются при подаче напряжения на указанные контакты.Реле состоит из катушки и NC (нормально замкнутого), NO (нормально разомкнутого) и общей линии. В идеальном состоянии (отсутствие питания) общий контакт закорочен с контактом NC (нормально замкнутый). Создание путитока между общей и нормально закрытой линией. Но когда на катушку реле подается достаточное напряжение, общий контакт замыкается на нормально разомкнутый контакт. Создание пути прохождения тока между общим и нормально разомкнутым контактом. Путь представляет собой прямое механическое соединение между проводами. Слева показано 5-контактное реле.Реле поставляется во многих упаковках, таких как однополюсный, однополюсный, двухполюсный и двойной (DBDT), однополюсный, двойной желоб (SPST) и т. Д. Реле
можно напрямую управлять с помощью выводов микроконтроллера. Маленькие реле на +3 В и +5 В могут напрямую управляться через контакты GPIO микроконтроллера (вход / выход общего назначения). Но для некоторых катушек реле требуется больший ток для переключения выходного канала. Чтобы обеспечить им достаточное напряжение, они выводятся через транзисторы. Реле выдерживают 10-15 ампер тока и 110-220 вольт.Мы можем легко управлять нагрузкой 500 Вт с помощью стандартных реле.
|
Реле управления большими нагрузками с микроконтроллером и транзистором |
Реле управления большими нагрузками с микроконтроллером и uln2003 |
На приведенных выше рисунках реле управляется одним транзистором и микросхемой uln2003, содержащей схему матрицы транзисторов Дарлингтона. Реле могут управлять нагрузками постоянного и переменного тока.Реле — это самый старый механический метод переключения тяжелых нагрузок, например ламп и вентиляторов.
Некоторые проекты, которые я создал с использованием реле и микроконтроллеров для управления большими токовыми нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
Управление большими нагрузками с помощью микроконтроллеров и полевых транзисторов.
Термин MOSFET расшифровывается как Metal Oxide Semiconductor Field Effect Transistor. Чтобы понять МОП-транзисторы, нам сначала нужно понять полевой транзистор (FET).Полевой транзистор (FET) — это тип транзистора, обычно используемый для усиления сигнала. Полевой транзистор может усиливать аналоговые или цифровые сигналы. Его также можно использовать для переключения нагрузок постоянного тока. В полевых транзисторах ток течет по полупроводниковому пути, который называется каналом . Полевые транзисторы существуют в двух основных классификациях. Они известны как переход FET (JFET) и металлооксидный полупроводниковый FET (MOSFET) . Мосфет имеет три контакта: затвор, сток и исток.Фет и Мосфет — большая тема, не могу объяснить это в этом посте. Ресурс доступен здесь FET и MOSFETFEt и mosfet для управления большими нагрузками с микроконтроллером
Mosfet стал очень популярным в наши дни. Они используются в импульсных источниках питания, понижающих и повышающих преобразователях. МОП-транзисторы обладают большим потенциалом в управлении большими токами с помощью сигнала ШИМ (широтно-импульсной модуляции). Они используются в зарядных устройствах солнечных батарей Pwm или MPPT (отслеживание максимальной мощности). Mosfet может управлять нагрузкой более +1000 Вт.Так что, если вам нужно управлять нагрузкой 1000 Вт с микроконтроллером, то МОП-транзисторы — хороший выбор.
Управление большими нагрузками с помощью микроконтроллеров и твердотельного реле (SSR)
SSR означает твердотельное реле. Он может выдерживать нагрузку в несколько тысяч ватт. Он может выдерживать ток от 300 до 500 ампер. SSR — это не обычное реле, которое похоже на механические переключатели. Небольшое напряжение на входе может вызвать протекание большой нагрузки (тока) из цепи.
|
SSR с микроконтроллером для управления большими нагрузками |
Чтобы полностью понять работу ssr, мы должны сначала понять два электронных компонента.Эти компоненты являются строительным блоком SSR. Компоненты сами по себе развиваются из концепции работы транзисторов.
|
SCR против TRIAC
SCR (кремниевый управляемый выпрямитель или тиристор) представляет собой полупроводниковое переключающее устройство с двумя выводами питания, называемыми анодом (A) и катодом (K), и одним выводом управления, называемым затвором (G). Если клемма K положительна по отношению к A, тиристор смещен в обратном направлении и блокирует протекание тока.Если клемма A положительна по отношению к K, SCR смещен в прямом направлении и будет блокировать ток, пока клемма G (затвор) не получит положительный импульс по отношению к K. Этот запускающий импульс запустит SCR в проводимость, и ток будет переходите от A к K. SCR будет проводить с почти постоянным падением напряжения на нем — обычно 1,2 В постоянного тока. SCR будет продолжать работать после того, как триггерный импульс прекратится, пока ток через SCR не прекратится, после чего он вернется в состояние блокировки.Название Triac означает триодный (трехэлектродный) переключатель переменного тока. Это тиристорное устройство, похожее на SCR, но отличается тем, что оно может переключаться на проводимость в обоих направлениях в ответ на положительный или отрицательный сигнал затвора. Символы TRIAC и SCR показаны слева. SCR может работать как TRIAC, если мы присоединим к нему еще один SCR в противоположном направлении, и ворота будут объединены.
SCR и TRAIC используются для управления нагрузками переменного тока. Они используются для контроля фаз электросети и т. Д.Они также могут работать на входе PWM. Они широко используются в цепях переменного тока для приглушенного света. Стандартные диммеры, доступные на рынке, состоят из SCR или TRIAC.
SSR для переменного тока обычно состоит из оптоизолятора, управляющего симистором. SSR для использования постоянного тока обычно состоит из оптоизолятора, управляющего силовым полевым МОП-транзистором.Некоторые проекты, которые я создал, используя реле и микроконтроллеры для управления сильноточными нагрузками и т. Д. Проекты содержат бесплатный исходный код и принципиальные схемы.
AC Power Control — Как контролировать электрическую мощность переменного тока: приложения
Для работы большинства бытовых электроприборов требуется питание переменного тока.Эта мощность переменного тока или переменный ток подается на приборы посредством операции переключения некоторых силовых электронных переключателей. Для бесперебойной работы нагрузок необходимо контролировать подаваемую на них мощность переменного тока. Это достигается, в свою очередь, за счет управления переключением силовых электронных переключателей, таких как SCR.
Два метода управления переключением SCR
- Метод управления фазой : Это относится к управлению переключением SCR со ссылкой на фазу сигнала переменного тока.Обычно тиристор срабатывает под углом 180 градусов от начала сигнала переменного тока. Или, другими словами, при пересечении нуля формы сигнала переменного тока запускающие импульсы подаются на вывод затвора тиристора. В случае управления мощностью переменного тока, подаваемой на SCR, подача этих импульсов задерживается за счет увеличения времени между импульсами, и это называется управлением задержкой по углу зажигания. Однако эти схемы вызывают гармоники более высокого порядка и генерируют радиочастотные помехи и сильный пусковой ток, а при более высоких уровнях мощности требуется больше фильтров для уменьшения радиопомех.
- Интегральное переключение цикла: Интегральное управление циклом — это еще один метод, используемый для прямого преобразования переменного тока в переменный, известный как переключение нуля или выбор цикла. Запуск интегрального цикла относится к цепям переключения переменного тока и, в частности, к цепям переключения переменного тока с нулевым напряжением интегрального цикла. Когда переключатель нулевого напряжения используется для переключения низкого коэффициента мощности (индуктивной нагрузки), такого как двигатель или силовой трансформатор, вызывает перегрев силового трансформатора в линиях электроснабжения.Следовательно, при насыщении тока нагрузки возникают чрезмерно высокие пусковые токи. Другой подход к переключению нулевого напряжения интегрального цикла включает использование относительно сложных устройств бистабильных накопительных элементов и логических схем, которые фактически подсчитывают количество полупериодов тока нагрузки. Коммутация интегрального цикла состоит из включения питания нагрузки на целое число циклов и последующего отключения питания еще на количество интегральных циклов. За счет переключения тиристоров при нулевом напряжении и нулевом токе генерируемые гармоники будут уменьшены.Использование интегрального цикла переключения плавного напряжения невозможно, а частота может изменяться. Интегральное переключение цикла путем срабатывания срабатывания тиристоров в качестве метода удаления всего цикла, циклов или частей циклов сигнала переменного тока является хорошо известным и старым методом управления мощностью переменного тока, особенно при нагрузках нагревателя переменного тока. Однако концепция достижения циклического перехвата формы волны напряжения с помощью микроконтроллера может быть очень точной в соответствии с программой, написанной на языке Assembly / C. Таким образом, среднее время действия напряжения или текущего напряжения на нагрузке пропорционально меньше, чем если бы весь сигнал был подключен к нагрузке.
Одним из побочных эффектов использования этой схемы является дисбаланс входного тока или формы волны напряжения, поскольку циклы включаются и выключаются по нагрузке, следовательно, они подходят для конкретных нагрузок в отличие от метода управления углом зажигания для минимизации THD.
Прежде чем переходить к примерам для каждого типа управления, давайте кратко расскажем об обнаружении перехода через ноль.
Обнаружение пересечения нуля или пересечения нулевого напряжения
Под термином «пересечение нулевого напряжения» мы понимаем точку на форме сигнала переменного тока, где сигнал пересекает нулевую точку отсчета формы волны или, другими словами, где форма волны сигнала пересекает точку x- ось.Он используется для измерения частоты или периода периодического сигнала. Его также можно использовать для генерации синхронизированных импульсов, которые можно использовать для запуска вывода затвора кремниевого управляемого выпрямителя, чтобы заставить его проводить под углом включения 180 градусов.
Синусоида по своей природе имеет узлы, в которых напряжение пересекает нулевую точку, меняет направление на противоположное и завершает синусоидальную волну.
Переключая нагрузку переменного тока в точке нулевого напряжения, мы практически исключаем потери и напряжения, вызванные напряжением.
Цепь ZVS или ZVR с измерением нулевого перекрестного напряжения или измерения нулевого напряжения
Обычно OPAMP, используемый для обнаружения перехода через нуль, работает как компаратор, сравнивая пульсирующий сигнал постоянного тока (полученный путем выпрямления сигнала переменного тока) с опорным постоянным напряжением ( полученный путем фильтрации пульсирующего сигнала постоянного тока). Опорный сигнал подается на неинвертирующую клемму, а пульсирующее напряжение — на инвертирующую клемму.
В случае, если пульсирующее напряжение постоянного тока меньше опорного сигнала, на выходе компаратора вырабатывается высокий логический сигнал.Таким образом, для каждой точки перехода через нуль сигнала переменного тока на выходе детектора перехода через ноль генерируются импульсы.
Видео о детекторах перехода через ноль
Интегральное управление циклом переключения (ISCC):
Для устранения недостатков переключения интегрального цикла и переключения фазового управления используется интегральное переключение управления циклом для управления тепловой нагрузкой. Схема ISCC состоит из 3-х секций. Первый состоит из источника питания для управления всеми внутренними усилителями и подачи энергии затвора на силовые полупроводниковые устройства.Вторая секция состоит из обнаружения нулевого напряжения путем обнаружения нулевого напряжения питания и обеспечивает фазовую задержку. В третьем разделе необходим каскад усилителя, который усиливает управляющий сигнал для обеспечения привода, необходимого для включения выключателя питания. Цепи ISCC состоят из пусковой цепи и усилителя мощности (FCPA) и источника питания для управления нагрузкой.
FCPA состоит из драйверов затвора для тиристора, а TRIAC используется в качестве силовых устройств в предлагаемой конструкции. Симистор может проводить ток в любом направлении, когда он включен, и раньше он назывался двунаправленным триодным тиристором или двусторонним триодным тиристором.Симистор — это удобный переключатель для цепей переменного тока, который позволяет управлять большими потоками мощности с помощью управляющих токов миллиамперной шкалы.
Применение интегрального переключения цикла — промышленное управление мощностью с помощью интегрального переключения
Этот метод можно использовать для управления мощностью переменного тока, особенно при линейных нагрузках, таких как нагреватели, используемые в электропечи. При этом микроконтроллер выдает выходной сигнал на основе полученного прерывания в качестве эталона для генерации запускающих импульсов.
Используя эти запускающие импульсы, мы можем управлять оптоизоляторами для запуска симистора для достижения интегрального управления циклом в соответствии с переключателями, которые связаны с микроконтроллером. Вместо двигателя предусмотрена электрическая лампа для наблюдения за его работой.
Блок-схема управления мощностью посредством переключения интегрального циклаЗдесь используется детектор перехода через ноль для подачи запускающих импульсов для импульсов затвора тиристора. Применение этих импульсов контролируется микроконтроллером и оптоизолятором.Микроконтроллер запрограммирован на подачу импульсов на оптоизолятор в течение фиксированного периода времени, а затем прекращение подачи импульсов на другой фиксированный промежуток времени. Это приводит к полному устранению нескольких циклов формы сигнала переменного тока, приложенного к нагрузке. Соответственно, оптоизолятор управляет тиристором на входе микроконтроллера. Таким образом регулируется мощность переменного тока, подаваемая на лампу.
Применение переключения с фазовым управлением — программируемое управление мощностью переменного тока
Блок-схема управления мощностью с помощью метода фазового управленияЭтот метод используется для управления силой света лампы путем управления мощностью переменного тока, подаваемой на лампу.Это делается путем задержки подачи запускающих импульсов на TRIAC или с помощью метода задержки по углу зажигания. Детектор перехода через нуль подает импульсы при каждом переходе через ноль сигнала переменного тока, который подается на микроконтроллер. Первоначально микроконтроллер подает эти импульсы на оптоизолятор, который соответственно запускает тиристор без какой-либо задержки, и, таким образом, лампа светится с полной интенсивностью. Теперь, используя клавиатуру, соединенную с микроконтроллером, требуемая интенсивность в процентах применяется к микроконтроллеру, и он запрограммирован на соответствующую задержку подачи импульсов на оптоизолятор.Таким образом, срабатывание тиристора задерживается и, соответственно, регулируется яркость лампы.
Управление мощностью переменного тока с тиристором с использованием микроконтроллера Pic [6nq8v0pg2qnw]
Управление мощностью переменного тока с помощью тиристора с помощью микроконтроллера pic. Управление мощностью переменного тока с помощью тиристора с помощью микроконтроллера pic предназначено для управления потоком мощности переменного тока через нагрузку. Этот проект разработан с использованием микроконтроллера PIC16F877A и схемы обнаружения пересечения нуля. Для регулирования мощности переменного тока с помощью тиристора используется метод контроля фазового угла.Тиристор используется как переключатель для управления потоком энергии. Микроконтроллер PIC16F877A используется для обнаружения пересечения нуля и генерации импульсных сигналов под определенным углом для тиристора. Он используется во многих проектах силовой электроники. Многие электрические проекты последнего года основаны на этом управлении мощностью переменного тока.Управление мощностью переменного тока с тиристором Вы также можете прочитать схему управления углом зажигания симистора. Начнем с базового понимания управления мощностью переменного тока с помощью тиритора. Например, если нагрузка подключена к источнику переменного тока через переключатель, как показано на рисунке ниже.Симистор используется как переключатель. Симистор — это разновидность тирситора. В симисторе два встречных тиристора соединены друг с другом.
Поток мощности переменного тока на нагрузку можно контролировать, управляя среднеквадратичным значением напряжения, возникающего на нагрузке, как показано на рисунке выше. Этот метод также называется методом регулятора напряжения переменного тока. В контроллере переменного напряжения среднеквадратичное значение напряжения, возникающего на нагрузке, регулируется путем изменения угла срабатывания сигнала затвора симистора, как показано на рисунке выше. Как вы знаете, мощность в цепях переменного тока рассчитывается по следующей формуле: P = V × I × cos (θ), где cos (θ) — коэффициент мощности
Чтобы упростить этот проект, мы использовали только резистивную нагрузку. .Внеся небольшие изменения в код, вы также можете использовать его с индуктивными нагрузками. В резистивных нагрузках коэффициент мощности всегда равен единице. Таким образом, cos (θ) = 1 и приведенная выше формула становится: P = V × I = V × V / R = V² / R P = V² / R Итак, согласно приведенной выше формуле, мощность на нагрузке прямо пропорциональна квадрату напряжения. Регулируя напряжение на нагрузке, можно также рассчитать мощность. Как я уже упоминал ранее, контроллеры напряжения переменного тока используются для управления среднеквадратичным значением напряжения на нагрузках. Цепи регулятора напряжения переменного тока находят множество применений в промышленности, например переключатели ответвлений в трансформаторах, индукционный нагрев, регулирование скорости асинхронного двигателя и управление освещением.
Типы регуляторов напряжения переменного тока Для регулирования мощности переменного тока с помощью тиристоров используются два типа регуляторов напряжения переменного тока. Краткое объяснение обоих из них приведено ниже:
Управление модуляцией с пропуском импульсов: В этом методе нагрузка подключается к источнику переменного тока на несколько циклов, а затем питание отключается на несколько циклов. Электропитание переменного тока контролируется регулированием угла зажигания тиристора.
Управление фазовым углом: В методе управления фазовым углом нагрузки подключаются к источнику переменного тока для определенной части положительного и отрицательного цикла.Конкретная часть зависит от угла зажигания тиристора.
В проекте управления мощностью переменного тока с помощью тиристоров метод управления фазовым углом используется для управления потоком мощности через нагрузку путем управления напряжением. Он также используется в зарядных устройствах.
Принципиальная схема управления мощностью переменного тока с тиристором Принципиальная схема управления мощностью переменного тока с тиристором с помощью микроконтроллера pic. Я также сделал необходимые комментарии к рисунку.
Микроконтроллер PIC16F877A используется для обнаружения перехода переменного напряжения через ноль, а микроконтроллер PIC16F877A генерирует импульс для симистора с определенной задержкой после обнаружения перехода через ноль.Я также опубликовал статью об обнаружении пересечения нуля с помощью микроконтроллера PIC16F877A. Для получения дополнительных сведений об обнаружении пересечения нуля проверьте следующую статью:
Определение пересечения нуля с использованием микроконтроллера pic. В этом проекте я использовал задержку 2 мс. Что это значит? Это означает, что микроконтроллер будет генерировать импульс после обнаружения пересечения нуля с задержкой 2 мс. Вы можете настроить задержку вручную, введя ее значение в коде, или вы также можете использовать переменный резистор для регулировки значения задержки с помощью аналого-цифрового преобразователя микроконтроллера PIC16F877A.В приведенной выше принципиальной схеме управления мощностью переменного тока с помощью Thirstier не задействовано слишком много науки. Сначала микроконтроллер
проверяет обнаружение пересечения нуля, а затем срабатывает угол симистора с задержкой 2 мс после обнаружения пересечения нуля.
Управление мощностью переменного тока с помощью тиристорной программы Код для проекта контроллера мощности переменного тока написан с использованием компилятора Mikro C pro. Просто поместите этот код в компилятор mikro C после создания нового проекта. В этом проекте используется Crsytal 11,059 МГц.
Необходимые комментарии также сделаны в приведенном выше коде.Код для управления питанием переменного тока не требует пояснений, но если вы все еще чувствуете какую-либо проблему, не стесняйтесь комментировать этот пост со своими проблемами. Этот код предназначен только для задержки угла стрельбы 2 мс. Если вам нужен код со схемой управления переменным углом открытия с помощью микроконтроллера, вы можете воспользоваться услугами моего проекта, связавшись со мной.
Измерение коэффициента мощности с помощью микроконтроллера PIC16F877A В этой статье я обсудил метод измерения коэффициента мощности с помощью микроконтроллера pic. Измерение коэффициента мощности с помощью микроконтроллера pic предназначен для измерения коэффициента мощности с помощью микроконтроллера pic и отображения его на ЖК-дисплее.В этот проект можно внести улучшения, добавив функцию автоматической коррекции коэффициента мощности с использованием конденсаторов. Прочитав эту статью, вы сможете ответить на следующие вопросы?
Что такое коэффициент мощности?
Зачем нужна коррекция коэффициента мощности?
Как улучшить коэффициент мощности?
Преимущества повышения коэффициента мощности?
Измерение коэффициента мощности с помощью микроконтроллера pic.
Автоматическая коррекция коэффициента мощности с помощью микроконтроллера pic.
Что такое коэффициент мощности? Начнем с базового введения коэффициента мощности. Коэффициент мощности — это в основном отношение реальной мощности, потребляемой электрической цепью, к общей кажущейся мощности, потребляемой электрической цепью. Другими словами, коэффициент мощности — это соотношение реальной и видимой мощности. В энергосистеме используется много индуктивных нагрузок. Индуктивным нагрузкам для правильной работы требуется реактивная мощность. Таким образом, основная причина коэффициента мощности в энергосистеме — это реактивное сопротивление.Конденсаторы обеспечивают реактивную мощность. Другими словами, конденсаторы генерируют реактивную мощность, а катушки индуктивности потребляют реактивную мощность.
Почему нам нужно улучшить коэффициент мощности? Реактивная мощность — это, по сути, перерыв в энергосистеме и линиях электропередачи. Реактивная мощность передается от точки выработки электроэнергии к нагрузке и, следовательно, теряет электрическую энергию. В настоящее время индуктивные нагрузки используются как в быту, так и в промышленности. Низкий коэффициент мощности приводит к потерям в линии передачи и падению напряжения в линиях передачи.Потребность в электроэнергии растет день ото дня, поэтому нельзя позволить себе тратить энергию на линии электропередачи. Поэтому нам необходимо улучшить коэффициент мощности энергосистемы и нагрузок. Обеспечивая локальную реактивную мощность на стороне нагрузки, мы можем увеличить коэффициент мощности системы и коэффициент мощности машин. Следовательно,
Повышение коэффициента мощности — это местный вопрос. Как я уже упоминал, конденсаторы являются источником реактивной мощности. Таким образом, конденсаторы можно использовать для повышения коэффициента мощности или для обеспечения реактивной мощности для локальной нагрузки, а не для выработки электроэнергии.
Как улучшить коэффициент мощности: прежде чем понимать, что такое коэффициент мощности? Позвольте мне сказать вам, какой коэффициент мощности хороший? Unity — идеальный коэффициент мощности. Резистивные нагрузки имеют единичный коэффициент мощности. Но все электрические нагрузки не являются полностью резистивными. Поэтому нам необходимо улучшить коэффициент мощности этих нагрузок. Коэффициент мощности можно увеличить, добавив к нагрузкам конденсатор коррекции коэффициента мощности. Конденсаторы обеспечивают реактивную мощность для локальной нагрузки. Было разработано множество методов для улучшения коэффициента мощности.Но в этой статье вы узнаете об измерении и коррекции коэффициента мощности с помощью микроконтроллера.
Преимущества повышения коэффициента мощности? Основные преимущества повышения коэффициента мощности приведены ниже:
Снижает потери в линиях электропередачи и кабелях
000
Снижает падение напряжения в линиях электропередачи и кабелях
Снижает нагрузку на энергосистему компании
Микроконтроллер коэффициента мощности:
измерение
с использованием
рис.
Коэффициент мощности в основном обусловлен концепцией запаздывания и опережения тока и напряжения.Когда форма волны тока отстает от напряжения на некоторый угол, коэффициент мощности будет отставать, а когда форма волны тока опережает напряжение на некоторый угол, коэффициент мощности будет опережающим. Катушка индуктивности вызывает запаздывающий коэффициент мощности, а конденсаторы — опережающий коэффициент мощности. Следовательно, конденсаторы улучшают коэффициент мощности, обеспечивая опережающую переменную или реактивную мощность в систему, что устраняет эффект запаздывающего коэффициента мощности катушек индуктивности. Теперь вопрос, как измерить коэффициент мощности с помощью микроконтроллера? Чтобы измерить коэффициент мощности, нам нужно измерить разность фазовых углов между формой волны напряжения и тока.Косинус этого фазового угла является коэффициентом мощности. Коэффициент мощности также представлен следующей формулой:
Коэффициент мощности = Cos (θ), где θ — это разность фазового угла между формой волны напряжения и тока. Таким образом, нам необходимо разработать метод измерения разности фазовых углов между формой волны напряжения и тока. Я использовал нулевую концепцию для измерения разницы во времени между формой волны тока и напряжения. Разницу во времени между двумя сигналами или волнами также можно использовать для измерения коэффициента мощности.Я расскажу об этом подробнее в следующей части этой статьи. А теперь перейдем к обнаружению пересечения нуля?
Что такое обнаружение пересечения нуля? Обнаружение пересечения нуля используется для обнаружения пересечения нуля синусоидальной волны от положительного полупериода до отрицательного полупериода или отрицательного полупериода. Чтобы измерить разницу во времени между двумя волнами, нам нужно обнаружить нулевое пересечение двух волн. Есть много доступных методов для измерения обнаружения пересечения нуля. Но я уже публиковал статью об обнаружении пересечения нуля с помощью микроконтроллера pic.Я объяснил концепцию обнаружения пересечения нуля в следующей статье. Поэтому я рекомендую вам сначала прочитать следующую статью, прежде чем читать дальше.
Как обнаружить пересечение нуля с помощью микроконтроллера pic Я предполагаю, что после прочтения статьи об обнаружении пересечения нуля вы получили представление о том, как обнаружить пересечение нуля синусоидальными волнами с помощью микроконтроллера pic. В схеме измерения нулевого коэффициента мощности используются две схемы обнаружения пересечения нуля. Один для формы волны напряжения, а другой для формы волны тока.После обнаружения перехода через нуль для волны напряжения и синусоидальной волны нам необходимо измерить разницу во времени между переходом через нуль формы волны напряжения и тока.
Как измерить разницу во времени двух волн для измерения коэффициента мощности: Теперь я расскажу, как измерить разницу во времени между двумя волнами. Очень легко измерить разницу во времени между двумя волнами с помощью аппаратного внешнего прерывания микроконтроллера. Аппаратное прерывание используется для обнаружения сигнала пересечения нуля. Для измерения времени используется внутренний таймер микроконтроллера.При возникновении внешнего прерывания на выводе микроконтроллера начнется отсчет времени, а после другого внешнего прерывания отсчет времени прекратится. Одно прерывание будет сгенерировано с помощью сигнала тока, а другое прерывание — с помощью перехода через нуль сигнала напряжения. Таймер
значениебудет сохранено в одной переменной. Значение этой переменной в основном представляет собой разницу во времени между двумя волнами. Для лучшего результата возьмите 20-30 значений и возьмите их среднее значение.
Как найти ангела, используя разницу во времени: Итак, используя разницу во времени, мы можем легко вычислить фазовый угол, используя приведенную ниже формулу: Разница во времени = средние значения таймера / 1000; В приведенном выше уравнении 1000 используется для преобразования времени в секунды, потому что половина синусоидальной волны составляет около 10 мксек, а в секунду будет 1000 отсчетов.θ = разница во времени * 2π; Коэффициент мощности = Cos (θ); После этого разница во времени умножается на 2π, чтобы преобразовать ее в радианы и фазовый угол в радианах. После этого, используя формулу коэффициента мощности, мы можем легко рассчитать коэффициент мощности. Все эти вычисления выполняются в программировании путем написания кода в микроконтроллере.
Схема измерения коэффициента мощности с использованием микроконтроллера pic: Принципиальная схема цепи измерения коэффициента мощности с использованием микроконтроллера pic приведена ниже. В схеме измерения коэффициента мощности используются трансформатор напряжения и трансформатор тока.
Схема измерения коэффициента мощности с использованием микроконтроллера pic На схеме выше. Трансформатор напряжения используется для понижения напряжения. Поскольку микроконтроллер не может напрямую считывать высокое напряжение 220 В переменного тока. Трансформатор тока используется для получения формы волны тока. величина тока зависит от нагрузки, а напряжение практически остается постоянным. После этого эти сигналы поступают на схему детектора перехода через нуль с помощью операционного усилителя LM358. Я уже размещал статью об обнаружении перехода через ноль с помощью операционного усилителя.Для получения дополнительной информации о схеме детектора пересечения нуля проверьте следующую статью:
Обнаружение пересечения нуля с использованием операционного усилителя Микроконтроллер PIC16F877A считывает пересечение нуля формы волны напряжения и тока и запускает таймер в соответствии с обнаружением пересечения нуля формы волны тока и напряжения. Микроконтроллер PC16F877A является основной частью этого проекта. В считывает обнаружение пересечения нуля. измеряет разницу во времени и рассчитывает коэффициент мощности в соответствии с приведенными выше формулами. После вычисления коэффициента мощности микроконтроллер PIC16F877A отображает его на ЖК-дисплее 16 X2.
SCR Применения | Переключатель, управление питанием переменного и постоянного тока, защита от перенапряжения
В этом руководстве мы узнаем о некоторых широко известных приложениях SCR. Применения SCR включают переключение, управление мощностью в цепях переменного и постоянного тока, защиту от перенапряжения и т. Д.
Приложения SCR
Благодаря широкому спектру преимуществ, таких как возможность включения из выключенного состояния в ответ на низкий ток затвора и также может переключать высокие напряжения, что позволяет использовать тиристор или тиристор в различных приложениях.
Эти приложения включают переключение, выпрямление, регулирование, защиту и т. Д. SCR используются для управления бытовыми приборами, включая освещение, контроль температуры, регулирование скорости вентилятора, нагрев и активацию сигнализации.
В промышленных приложениях тиристоры используются для управления скоростью двигателя, зарядкой аккумулятора и преобразованием мощности. Некоторые из них описаны ниже.
SCR как коммутатор
Операция переключения — одно из наиболее важных приложений SCR.SCR часто используется в качестве твердотельного реле и имеет больше преимуществ, чем электромагнитные реле или переключатели, поскольку в SCR нет движущихся частей.
На рисунке ниже показано применение SCR в качестве переключателя для включения и выключения питания, подаваемого на нагрузку. Мощность переменного тока, подаваемая на нагрузку, регулируется путем подачи на SCR чередующихся запускающих импульсов. Резисторы R1 и R2 защищают диоды D1 и D2 соответственно. Резистор R ограничивает ток затвора.
Во время положительного полупериода входа SCR1 смещен в прямом направлении, а SCR2 — в обратном.Если переключатель S замкнут, ток затвора подается на SCR1 через диод D1 и, следовательно, SCR1 включается. Следовательно, ток течет к нагрузке через тиристор 1.
Аналогично, во время отрицательного полупериода сигнала SCR2 смещен в прямом направлении, а SCR1 — в обратном. Если переключатель S замкнут, ток затвора течет к SCR2 через диод D2. Следовательно, SCR2 включен, и ток нагрузки течет через него.
Следовательно, управляя переключателем S, ток нагрузки можно регулировать в любом желаемом положении.Замечено, что этот переключатель управляет током в несколько миллиампер для управления током в несколько сотен ампер в нагрузке. Таким образом, этот метод переключения более выгоден, чем механическое или электромеханическое переключение.
В начало
Управление мощностью с использованием SCR
SCR могут управлять мощностью, передаваемой на нагрузку. Часто требуется изменять мощность, подаваемую на нагрузку, в зависимости от требований к нагрузке, таких как регулировка скорости двигателя и регуляторы освещенности.
В таких условиях изменение мощности с помощью обычных регулируемых потенциометров не является надежным методом из-за большого рассеивания мощности. Для уменьшения рассеиваемой мощности в цепях большой мощности, тиристоры — лучший выбор в качестве устройств управления мощностью.
Управление мощностью переменного тока с использованием SCR
В цепях переменного тока регулирование фазы является наиболее распространенной формой управления мощностью SCR. При управлении фазой, изменяя угол срабатывания альфа на выводе затвора, достигается управление мощностью.
На рисунке ниже показана полная схема управления волной переменного тока, которая иллюстрирует метод управления фазой. Учтите, что питание переменного тока подается на два встречно-параллельных тиристора. Во время положительного полупериода сигнала SCR1 проводит, в то время как в отрицательном полупериоде SCR2 проводит, когда к ним подаются соответствующие импульсы затвора.
Изменяя угол включения соответствующих тиристоров, время включения изменяется. Это приводит к варьированию мощности, потребляемой нагрузкой. На рисунке ниже тиристоры срабатывают при задержке импульсов (что означает увеличение угла зажигания), что приводит к снижению мощности, подаваемой на нагрузку.
Основным преимуществом фазового управления является то, что тиристоры автоматически отключаются при каждом текущем нулевом положении переменного тока. Следовательно, для выключения тиристора не требуется схема коммутации.
В начало
Управление мощностью постоянного тока с использованием SCR
В случае цепи постоянного тока мощность, подаваемая на нагрузку, изменяется путем изменения продолжительности включения и выключения SCR. Этот метод называется прерыванием или управлением ВКЛ-ВЫКЛ. На рисунке ниже показано простое двухпозиционное управление нагрузкой с помощью SCR.
Также можно переключать тиристор с определенной частотой срабатывания, чтобы ток, протекающий к нагрузке, изменялся. Примером такой схемы является схема SCR на основе ШИМ, обеспечивающая переменный выход на нагрузку.
Можно производить переменную мощность постоянного тока для нагрузки, используя схемы выпрямителя с регулировкой фазы. Средняя мощность постоянного тока, подаваемая на нагрузку, регулируется путем управления моментом включения SCR. Некоторые из этих схем выпрямителя приведены ниже.
Полупериодный выпрямитель
На приведенной ниже схеме показана схема однофазного полуволнового выпрямителя с использованием тиристора. Диод, включенный последовательно с переменным резистором, подключен к затвору, который отвечает за запуск тринистора.
- Во время отрицательного полупериода входного сигнала переменного тока тиристор смещен в обратном направлении. Следовательно, ток через нагрузку не течет.
- Во время отрицательного полупериода входа тиристор смещен в прямом направлении. Если резистор изменяется таким образом, что к затвору прикладывается минимальный ток срабатывания, то тиристор включается.Следовательно, ток начинает течь к нагрузке.
- Если ток затвора выше, напряжение питания, при котором SCR включается, будет меньше. Угол, при котором SCR начинает проводить, называется углом зажигания. Для этой схемы выпрямителя угол открытия можно изменять только в течение положительного полупериода.
- Следовательно, изменяя угол зажигания или ток затвора (изменяя сопротивление в этой цепи), можно заставить SCR проводить часть или полный положительный полупериод, так что средняя мощность, подаваемая на нагрузку, изменяется.
Полнополупериодный выпрямитель
В двухполупериодном выпрямителе выпрямляются как положительная, так и отрицательная волна входного питания. Следовательно, по сравнению с полуволновым выпрямителем среднее значение постоянного напряжения выше, а также меньше пульсаций. На рисунке ниже показана схема двухполупериодного выпрямителя, состоящая из двух тиристоров, соединенных с центральным ответвлением трансформатора.
• Во время положительного полупериода входа SCR1 смещен в прямом направлении, а SCR2 — в обратном.При подаче правильного стробирующего сигнала SCR1 включается и, следовательно, через него начинает течь ток нагрузки.
• Во время отрицательного полупериода входа SCR2 смещен в прямом направлении, а SCR1 — в обратном. При срабатывании затвора SCR2 включается, и, следовательно, ток нагрузки протекает через SCR2.
• Следовательно, изменяя ток срабатывания тринистора, изменяется средняя мощность, подаваемая на нагрузку.
Полнополупериодный мостовой выпрямитель
Вместо использования трансформатора с центральным ответвлением можно также использовать четыре тиристора в мостовой конфигурации для получения двухполупериодного выпрямления.Во время положительного полупериода входа SCR1 и SCR2 находятся в проводящем состоянии. Во время отрицательного полупериода SCR3 и SCR4 находятся в проводящем состоянии. Угол проводимости каждого тиристора регулируется путем изменения соответствующих токов затвора. Следовательно, выходное напряжение на нагрузке меняется.
Вернуться к началу
Защита от перенапряжения с помощью SCR
Благодаря быстрому переключающему действию SCR одним из распространенных приложений SCR является то, что его можно использовать в качестве защитного устройства.Цепь, используемая для защиты от перенапряжения, называется цепью лома.
На рисунке ниже показана схема лома с использованием тиристора. Эта цепь лома подключается к цепи или нагрузке, которую необходимо защитить. Эта схема состоит из тринистора, который запускается стабилитроном. Этот стабилитрон выбран таким образом, что при нормальных условиях работы он действует как разомкнутый переключатель.
Итак, напряжение на резисторе равно нулю, и, следовательно, тиристор остается в выключенном состоянии.
Каждый раз, когда напряжение источника питания превышает указанные пределы, стабилитроны начинают проводить ток, и на резисторе появляется достаточное напряжение. Это переводит SCR в режим проводимости.
