Что такое PIC-микроконтроллеры и для чего они используются. Как программировать PIC-контроллеры. Какие существуют семейства PIC-микроконтроллеров. Где применяются устройства на основе PIC. Как создавать программы для PIC-контроллеров.
Что представляют собой PIC-микроконтроллеры
PIC-микроконтроллеры — это программируемые интегральные схемы, предназначенные для управления различными электронными устройствами. Основные особенности PIC-контроллеров:
- Содержат в одном корпусе процессор, память, порты ввода-вывода
- Имеют небольшие размеры и низкое энергопотребление
- Легко программируются на языках ассемблера или C
- Доступны в различных вариантах по объему памяти, количеству портов и т.д.
- Широко используются в бытовой электронике, промышленной автоматике, робототехнике
Основные семейства PIC-микроконтроллеров
Компания Microchip Technology выпускает несколько семейств PIC-микроконтроллеров:
- 8-битные — самые простые и дешевые модели
- 32-битные — мощные микроконтроллеры для сложных задач
Каждое семейство включает множество моделей, отличающихся объемом памяти, набором периферии, корпусом и другими параметрами. Это позволяет подобрать оптимальный контроллер для конкретного применения.
Где применяются устройства на PIC-микроконтроллерах
Благодаря своей универсальности, PIC-контроллеры нашли широкое применение в различных областях:
- Бытовая техника — телевизоры, стиральные машины, микроволновые печи
- Автомобильная электроника — системы управления двигателем, климат-контроль
- Промышленная автоматика — контроллеры станков, датчики, измерительные приборы
- Робототехника — управление двигателями, обработка сигналов с датчиков
- Умный дом — системы освещения, безопасности, климат-контроля
- Портативная электроника — MP3-плееры, фотоаппараты, игрушки
PIC-контроллеры также популярны среди радиолюбителей для создания различных самодельных устройств.
Как программировать PIC-микроконтроллеры
Для программирования PIC-микроконтроллеров используются следующие средства:
- Среда разработки MPLAB X IDE от Microchip
- Компиляторы ассемблера и C (например, XC8, XC16)
- Программаторы для записи прошивки в микроконтроллер
- Отладочные платы для тестирования программ
Процесс программирования включает следующие этапы:

- Написание программы на ассемблере или C
- Компиляция программы в машинный код
- Запись полученной прошивки в память микроконтроллера с помощью программатора
- Отладка и тестирование программы на реальном устройстве
Преимущества использования PIC-микроконтроллеров
PIC-микроконтроллеры обладают рядом важных преимуществ:
- Низкая стоимость — доступны модели стоимостью менее $1
- Широкий выбор моделей с различными характеристиками
- Наличие встроенной периферии (АЦП, таймеры, интерфейсы)
- Низкое энергопотребление, возможность работы от батареек
- Простота программирования на C или ассемблере
- Большое количество готовых библиотек и примеров кода
- Хорошая документация и техподдержка от производителя
Эти преимущества делают PIC оптимальным выбором для многих встраиваемых систем и электронных устройств.
Создание программ для PIC-контроллеров
Программирование PIC-микроконтроллеров возможно на языках ассемблера и C. Основные этапы создания программы:
- Выбор модели микроконтроллера и изучение его документации
- Установка среды разработки MPLAB X IDE
- Написание кода программы на C или ассемблере
- Компиляция программы в машинный код
- Симуляция работы программы в MPLAB
- Отладка программы на реальном устройстве
- Запись финальной версии прошивки в микроконтроллер
Для начинающих рекомендуется использовать язык C, так как он проще в освоении, чем ассемблер. Также полезно изучить готовые примеры кода для типовых задач.

Программаторы для PIC-микроконтроллеров
Для записи программы в память PIC-контроллера используются специальные устройства — программаторы. Существует несколько типов программаторов:
- Фирменные программаторы Microchip (PICkit, ICD) — надежные, но дорогие
- Программаторы сторонних производителей — более доступны по цене
- Самодельные программаторы — самый бюджетный вариант
При выборе программатора нужно учитывать:
- Совместимость с нужными моделями микроконтроллеров
- Поддержку используемой среды разработки
- Наличие функций внутрисхемного программирования и отладки
- Скорость программирования
- Надежность и удобство использования
Для начинающих оптимальным выбором будет недорогой программатор от проверенного производителя.
Радиолюбительские конструкции на PIC-микроконтроллерах (4 книги +CD) Заец Н. И.
В четырех книгах представлены различные конструкции на микроконтроллерах, которые будут интересны не только опытным, но и начинающим радиолюбителям. Для удобства при повторении конструкций приведены рисунки печатных плат, даны исходные тексты программ и «прошивки» контроллеров.
К книгам приложены мануалы использованных микросхем и контроллеров, а так же программы MPLab, IC-Prog и PonyProg2000 на CD диске.
Список книг:
Заец Н.И. — Радиолюбительские конструкции на PIC-микроконтроллерах. С алгоритмами работы программ и подробными комментариями к исходным текстам. — М.: СОЛОН-Пресс, 2003. — 368 с.: ил. — (Серия «СОЛОН — радиолюбителям», выпуск 22) ISBN 5-98003-078-6+CD
В книге представлено 20 описаний радиолюбительских устройств различного назначения: часы, таймеру, автоматы, программатор и многие другие, выполненные на микроконтроллере PIC16F84A. Впервые книга с различными устройствами на PIC-микроконтроллере предназначается для радиолюбителей с любым уровнем подготовленности. Даже те, кто не знаком с программированием микроконтроллеров, смогут без труда повторить любое устройство. Радиолюбители, имеющие опыт работы с программированием, могут изменить программы под свои цели. Для этого в книге даны алгоритмы работы и исходные тексты программ с подробными комментариями.
Впервые книга с различными устройствами на PIC-микроконтроллере предназначается для радиолюбителей с любым уровнем подготовленности. Даже те, кто не знаком с программированием микроконтроллеров, смогут без труда повторить любое устройство. Радиолюбители, имеющие опыт работы с программированием, могут изменить программы под свои цели. Для этого в книге даны алгоритмы работы и исходные тексты программ с подробными комментариями.Автор также делится опытом программирования и работы с ассемблером MPLAB и программатором PonyProg2000.
Содержание:
Устройства с цифровой индикацией
Часы с тремя будильниками
Часы с будильником — шахматные часы
Автомобильный цифровой тахометр
Программатор
Универсальный таймер
Автомат включения освещения
Счетчик витков
Кабельный пробник
Радиоохрана
Электронный домоуправ
Устройства с индикацией точечными светодиодами
Два автомата суточного включения нагрузки
Часы-будильник
Будильник с установкой времени
Походный будильник
«Песочные» часы
Автомат управления размораживанием холодильника
Рекомендации
Приложения
1 Справочные данные на микроконтроллер PIC16F84A
2 Команды микроконтроллера
3 Макрокоманды ассемблера MPASM
4 Коды прошивок микроконтроллеров
5 PIC-микроконтроллеры в интернете
6 Сообщения MPASM
Литература
Заец Н.И. — Радиолюбительские конструкции на PIC-микроконтроллерах. С алгоритмами работы программ и подробными комментариями к исходным текстам. Книга 2. — М.: СОЛОН-Пресс, 2005. — 192 с.: ил. — (Серия «СОЛОН — радиолюбителям») ISBN 5-98003-238-Х+CD
В книге даны новые примеры применения PIC-микроконтроллеров в радиолюбительской практике. Программисты найдут в книге программы с использованием встроенного в микроконтроллер модуля АЦП и программы с различными внешними устройствами — термодатчиками типа DS 18×20, LCD-дисплеями. Радиолюбители, которые желают повторить устройства, могут выбрать цифровой милливольтметр, для того чтобы защитить свой дом от перепадов напряжения, а трехфазный двигатель от перегрузки. Термометр-часы, градусник и два терморегулятора будут полезными в любом доме. Ко всем программам даны алгоритмы работы и подробные комментарии.
Содержание:
К читателям
Устройства с использованием АЦП
Милливольтметр
Цифровой прибор для блока питания с установкой защиты
Автомат защиты от перепадов сетевого напряжения
Устройство защиты от перепадов сетевого напряжения
Устройство защиты без индикации
Устройство защиты трехфазных двигателей
Устройства, измеряющие температуру
Т ермометр-часы
Два терморегулятора
Приложение
Коды прошивок микроконтроллеров
Литература
Заец Н.И. — Радиолюбительские конструкции на PIC-микроконтроллерах. Книга 3. — М.: СОЛОН-Пресс, 2006. — 240 с.: ил. — (Серия «СОЛОН — радиолюбителям») ISBN 5-98003-250-9 + Приложение +CD
Третья книга расширяет диапазон применения PIC-микроконтроллеров в радиолюбительской практике. В ней дан пример программы с использованием встроенного в микроконтроллер модуля USART и различных внешних устройств — LCD-дисплеев и ЖКИ, выполненных по COG-технологии. Радиолюбители, которые желают повторить устройства, могут выбрать: охрану подворья, шахматные часы, таймеры на 7 и 9 выходов, а также автомат кормления аквариумных рыб. Для родной школы можно изготовить простое устройство подачи звонков по расписанию.
В отдельную главу вынесены «трудные темы» взаимодействия микроконтроллеров с внешними устройствами: ЖК-дисплеями и термодатчиками типа DS 18×20. Ко всем программам даны алгоритмы работы и подробные комментарии.
Книга предназначена для широкого круга радиолюбителей, а также может быть полезна студентам, изучающим программирование микроконтроллеров.
Содержание:
К читателям
Содержание компакт-диска
Необходимые для дома устройства
Охрана подворьем восемь объектов
Таймер на семь выходов
Таймер на девять выходов
Автомат кормления аквариумных рыб
Устройство подачи звонков по расписанию
Шахматные часы-таймер
Взаимодействие микроконтроллеров с внешними устройствами
Управление термодатчиками типа DS 18×20
Управление жидкокристаллическими дисплеями
Проверка ЖКИ типа TIC9162
Литература
Заец Н.И. — Радиолюбительские конструкции на PIC-микроконтроллерах. Книга 4. — К.: «МК-Пресс», 2008. — 336 с.: ил. ISBN 978-966-8806-42-1+CD
Данная книга — практическое пособие по освоению микроконтроллеров PICmicro компании Microchip и другой современной элементной базы, наподобие индикаторов, выполненных по COG-технологии. Рассмотрены алгоритмы работы, схемы и программы для различных полезных устройств: многофункциональных часов, отображающих текущее время и температуру воздуха; автомобильных часов, фиксирующих время в пути и сообщающих о поломке реле-регулятора; автомата включения освещения; цифрового устройства для блока питания с установкой защиты по току и напряжению; специализированных термометров и др. Для начинающих дана глава о наладке устройств на микроконтроллерах. Книга предназначена для широкого круга радиолюбителей, а также может быть полезна студентам, изучающим программирование микроконтроллеров.
Содержание:
Принципиальная схема
Печатная плата
Общий вид
Работа с устройством
Калибровка термометра
Глава 2 Автомобильные часы, вольтметр, таймер
Принципиальная схема
Наладка устройства
Работа с устройством
Глава 3 Таймеры десятичного счета
Принципиальная схема
Печатная плата
Работа с таймером
Глава 4 Автомат включения освещения
Принципиальная схема
Работа с устройством
Глава 5 Два термометра с памятью
Принципиальная схема
Работа с устройством
Глава 6 Терморегулятор с гистерезисом
Принципиальная схема
Печатная плата
Работа с устройством
Глава 7 Термометр-градуснbк
Принципиальная схема
Работа с устройством
Глава 8 Усовершенствованное устройство для блока питания с установкой защиты
Принципиальная схема
Печатная плата
Наладка устройства
Работа с устройством
Глава 9 Контроллер трех насосов
Работа устройства
Глава 10 Наладка устройств на микроконтроллерах
Работа с программой PonyProg2000
Работа с программой IC-Prog
Устройство не работает
Устройство работает неправильно
Список литературы
Серия / Цикл: Радиолюбительские конструкции на PIC-микроконтроллерах
Год издания: 2003-2008
Издательство: Солон-Пресс
Формат: pdf, CD
Язык: русский
Размер: 156,52 Mb
Скачать Радиолюбительские конструкции на PIC-микроконтроллерах (4 книги +CD)
PIC-микроконтроллеры микроконтроллеры Заец
PIC-контроллер. Программирование PIC-контроллеров. Схемы PIC-контроллеров. Схемы и устройства на микроконтроллерах Схемы на pic для компьютера
Когда делаются схемы, необходимо, чтобы кто-то или что-то контролировало выполнение необходимых действий. Для человека это довольно проблематично, так как приходится использовать значительное количество различных элементов, позволяющих контролировать их работу (транзисторы, резисторы, тиристоры, диоды, конденсаторы и прочие). Но все сложные и большие схемы можно контролировать с помощью контроллеров (микроконтроллеров). Что они собой представляют, будет рассказано на примере семейств РІС. Итак, для чайников? Какая их схема и где они используются.
Что собой представляет PIC-микроконтроллер
PIC-контроллер (или микроконтроллер) является средством автоматизации выполнения определённых действий с помощью заранее подготовленной программы. Особенностью представителей этой линейки продукции является легкость в программировании и доступность всех необходимых функций для работы. Обрисовывая его конструкцию, следует заметить, что в его составе присутствует только один кристалл кремния (это характерная особенность всех микроконтроллеров). Кроме него, PIC-контроллер имеет определённое количество ножек. Часть из них могут использоваться как логические входы, часть как выходы, остальные имеют двустороннее применение. Ножки могут быть или цифровыми, или аналоговыми.
Для работы подавляющего большинства РІС-контроллеров необходимо стабильное напряжение — 5В. Этого хватает, чтобы он мог работать в своём обычном режиме и выполнять поставленную перед ним программу. напрямую от компьютера невозможно. Для этой цели используется программатор.
Семейства контроллеров
PIC-контроллер не существует в единичном экземпляре. Компания производитель выпускает значительный ассортимент микроконтроллеров, каждый из которых имеет свои характеристики, возможности и потенциальные цели применения. Количество самих семейств довольно велико и зависит от классифицирующего признака, который берётся как основной. Поэтому стоит сообщить только об основной классификации, в которой есть всего три семейства: 8-, 16- и 32-битные. Они в свою очередь делятся на другие, но поскольку сами семейства не являются темой статьи, то о них и не будет вестись разговор.
Где применяется
Благодаря своей универсальности PIC-контроллер может быть применён практически где угодно. Сами микроконтроллеры можно встретить в холодильниках, телевизорах, стиральных машинках. Но линейка продукции РІС имеет ту особенность, что схемы на PIC-контроллерах популярны среди радиолюбителей и робототехников-самоучек. С их помощью можно легко настроить работу узла или всего приспособления. Способствует такой популярности разумная цена, легкость программирования и значительное количество учебного материала.
Применить PIC-контроллер можно при создании робота-руки и в других поделках, которые можно сделать, ограничиваясь скромным бюджетом. Можно использовать и для чего-то производственного — довольно популярной является тема создания автоматических самодельных станков, управляемых микроконтроллером. Спектр использования является широким, и при грамотном подходе могут быть выполнены практически любые цели, поэтому схемы на PIC-контроллерах можно увидеть не только на любительских творениях.
Программное обеспечение для работы с PIC-контроллером
Минимальное необходимое программное обеспечение — это блокнот. Но всё же в силу свободного распространения можно воспользоваться и предлагаемым от компании-производителя программным средством MPLAB. Точнее, линейкой программных средств (среды разработки, компиляторы) MPLAB. Благодаря политике компании он распространяется бесплатно, но имеет определённые ограничения. Так, при краткосрочной демонстрационной версии можно попробовать со всеми возможностями, но после её окончания функционал программы будет урезан. В полноценной программе присутствует значительный инструментарий, который позволяет легко создавать программы, удобно искать различные проблемные участки и проводить оптимизацию кода. В зависимости от версии может быть прекращена функция оптимизации кода или уменьшено количество контроллеров, поддерживаемых программой. Ради правды стоит сказать, что компания оставляет поддержку исключительно самым популярным представителям.
Существует и ряд программного обеспечения, предоставляемого другими компаниями. В целом их функционал является похожим, но существуют и отличия. Так, многие высказывают недовольство, что MPLAB имеет нелояльный к пользователям дизайн. Поэтому производители делают ставку на сохранении обрезаемых функций и удобстве работы с их программным обеспечением.Программы для PIC-контроллеров весьма разнообразны, поэтому тут в значительной мере дело вкуса.
Создание программы для PIC-контроллера
Создавать специальную программу можно с помощью соответствующего программного обеспечения и даже в простом блокноте. Такая возможность существует благодаря тому, что он работает с такими языками программирования, как ассемблер и С. Главное отличие заключается в количестве прописываемой информации и лёгкости задания данных. Можно много услышать о сложности С, но ассемблер ещё сложнее и требует более тщательного подхода.
Так, при создании программы необходимо указать, для какого контроллера она предназначается. Может понадобиться провести ряд настроек, но проводить их необходимо при наличии опыта работы или уверенности в своих силах, ведь ошибки могут привести к тому, что микроконтроллеры превратятся в обычные кусочки пластика и железа.
Программирование с помощью программатора
Но как перенести разработанную программу в сам микроконтроллер? Как происходит программирование микроконтроллеров? Специально для этой цели существуют специальные устройства — программаторы. Они посылают микроконтроллеру сигналы, которые изменяют ячейки в памяти в соответствии с программой. Для начала процесса перенесения данных необходимо вставить микроконтроллер в программатор, а его, в свою очередь, подключить к компьютеру. Затем с помощью программного обеспечения следует запустить прошивку. Обычно программирование PIC-контроллеров продолжается от тридцати секунд до двух минут.
Виды программаторов
Какой программатор выбрать для записи программы на микроконтроллер? Условно можно выделить три вида: самодельные, от компании-производителя и заводские от других компаний. Использование каждого из них имеет свои особенности.
Так, самодельные программаторы являются довольно дешевыми. Но их использование чревато тем, что они могут запросто превратить микроконтроллер в кусочек пластика и железа. И программирование микроконтроллеров может в таких случаях обратиться неприятными последствиями в виде удара током, поэтому следует придерживаться техники безопасности. К тому же если делать самому с нуля, то часто получится продукт с довольно ограниченными возможностями относительно смены объекта работы. Но в мировой сети можно найти значительное количество решений этой проблемы, предложенных другими людьми, и которые, вероятно, не доставят вам проблем.
Оригинальный программатор от компании-производителя сможет качественно выполнить свою работу для любого микроконтроллера. На него существует гарантия, и если после получения он не работает, то заменить не проблема. Но в порядке вещей, когда прошивка PIC-контроллеров им осуществляется без проблем.
Но останавливает от его приобретения довольно высокая цена.
Программаторы, выпущенные другими компаниями, имеют довольно широкий диапазон объектов, с которыми работают. Их особенностью является низкая цена и/или возможность работать с другими микроконтроллерами кроме PIC. Есть и поистине универсальные «монстры», которые могут обеспечивать работу различных типов, но из-за необходимости создания большого количества соединений их цена низкой не бывает.
Схематические особенности
И напоследок несколько слов о схемах изображений. Следует ориентироваться по ножкам на основании сопроводительной документации, так как схематически часто микроконтроллеры отличаются от реального построения выводов. Главным в таких случаях являются подписанные выводы, и именно по ним и следует ориентироваться при создании устройства.
На, казалось бы, морально устаревшем контроллере 2051, мы не раз задумывались о том, чтобы собрать похожий измеритель, но на более современном контроллере, чтобы снабдить его дополнительными возможностями. Критерий поисков, в основном, был только один — это широкие диапазоны измерения. Однако, все аналогичные схемы, найденные в интернете, имели даже программное ограничение диапазонов, причём довольно значительное. Для справедливости стоит заметить, что вышеназванный прибор на 2051 вообще не имел ограничений (они были лишь аппаратными), а программно в нём даже были заложены возможности измерения — мега и -гига значений!
Как-то, изучая в очередной раз схемы, мы обнаружили полезнейший прибор — LCM3, обладающий приличным функционалом при небольшом количестве деталей. Прибор умеет в широчайших пределах измерять индуктивность, ёмкость неполярных конденсаторов, ёмкость электролитических конденсаторов, ESR, сопротивления (в том числе — сверхмалые), оценивать качество электролитических конденсаторов. Работает прибор на известном принципе измерения частоты, однако интересен тем, что генератор собран на встроенном в микроконтроллер PIC16F690 компараторе. Возможно, параметры этого компаратора не хуже, чем у LM311, ведь заявленные диапазоны измерений таковы:
- ёмкость 1пФ — 1нФ с разрешением 0,1пФ и точностью 1%
- ёмкость 1нФ — 100нФ с разрешением 1пФ и точностью 1%
- ёмкость 100нФ — 1мкФ с разрешением 1нФ и точностью 2,5%
- ёмкость электролитических конденсаторов 100нФ — 0,1Ф с разрешением 1нФ и точностью 5%
- индуктивность 10нГн — 20Гн с разрешением 10нГн и точностью 5%
- сопротивление 1мОм — 30Ом с разрешением 1мОм и точностью 5%
Применённые в измерителе решения нам понравились, и мы решили не собирать новый прибор на атмеловском контроллере, а применить PIC. От этого венгерского измерителя была взята частично (а затем — и полностью) схема. Затем была декомпилирована прошивка, и на её основе написана новая, под собственные нужды. Однако, авторская прошивка настолько хороша, что с ней прибор, наверное, не имеет аналогов.
Нажмите для увеличения
Особенности измерителя LCM3:
- при включении прибор должен находиться в режиме измерения ёмкости (если же он находится в режиме измерения индуктивности, то соответствующей надписью на экране попросит перевести с другой режим)
- танталовые конденсаторы должны быть с возможно меньшим ESR (менее 0,5 Ом). ESR конденсатора CX1 33нФ также должен быть низким. суммарный импеданс этого конденсатора, индуктивности и кнопки переключения режимов не должен превышать 2,2 Ом. Качество этого конденсатора вцелом должно быть очень хорошим, он должен иметь малый ток утечки, поэтому стоит выбирать из высоковольтных (например, на 630 вольт) — полипропилен (MKP), стирофлекс-полистирол (KS, FKS, MKS, MKY ?). Конденсаторы C9 и C10, как написано на схеме, — полистирол , слюда, полипропилен. Резистор сопротивлением 180 Ом должен иметь точность 1%, резистор 47 Ом также должен быть 1%.
- прибор оценивает «качество» конденсатора. точной информации, какие именно параметры рассчитываются, нет. вероятно, это — утечка, тангенс угла потерь диэлектрика, ESR. «качество» отображается в виде закрашенного стаканчика: чем меньше он заполнен, тем лучше конденсатор. у неисправного конденсатора стаканчик закрашен полностью. однако, такой конденсатор можно применять в фильтре линейного стабилизатора.
- дроссель, используемый в приборе, должен быть достаточно габаритным (выдерживать ток не менее 2А без насыщения) — в виде «гантельки» или на броневом сердечнике.
- иногда при включении прибор выдаёт на экране «Low Batt». при этом нужно отключить и снова включить питание (вероятно, глюк).
- имеется несколько версий прошивки данного прибора: 1.2-1.35, причём последняя, по словам авторов, оптимизирована для дросселя на броневом сердечнике. однако, на дросселе в виде гантельки она также работает и только в этой версии оценивается качество электролитических конденсаторов.
- к прибору возможно подключить небольшую приставку для внутрисхемного (без выпаивания) измерения ESR электролитических конденсаторов. Она понижает напряжение, прилагаемое к проверяемому конденсатору, до 30мВ, при котором полупроводники не открываются и не влияют на измерение. Схему можно найти на авторском сайте.
- Режим измерения ESR включается автоматически перетыканием щупов в соответствующее гнездо. Если при этом вместо электролитического конденсатора будет подключен резистор (до 30 Ом), то прибор автоматически переключится в режим измерения малых сопротивлений.
- нажать кнопку калибровки
- отпустить кнопку калибровки
- замкнуть щупы прибора
- нажать кнопку калибровки
- дождаться появления сообщения R=….Ом
- отпустить кнопку калибровки
- дождаться сообщения об окончании калибровки
- замкнуть щупы прибора
- нажать кнопку калибровки, на экране будут отображены напряжение, прилагаемое к измеряемому конденсатору (рекомендуемые значения — 130…150 мВ, завитит от дросселя, который нужно размещать подальше от металлических поверхностей) и частота измерения ESR
- дождаться сообщения R=….Ом
- отпустить кнопку калибровки
- показания сопротивления на экране должны стать нулевыми
Затем:
- подключить схему (либо замкнуть vpp и gnd)
- включить прибор и нажать кнопку калибровки, при этом на экране появится значение калибровочной ёмкости
- кнопками DN и UP скорректировать значения (возможно, в разных версиях прошивки для ускоренной корректировки работают основные кнопки calibrate и mode)
- в зависимости от версии прошивки, возможен и другой вариант: после нажатия кнопки калибровки, на экране появляется значения калибровочной ёмкости, которое начинает расти. Когда доходит до нужного значения, нужно остановить рост кнопкой mode и разомкнуть vpp и gnd. Если же не успели вовремя остановить и перескочили нужное значение, то кнопкой калибровки можно его уменьшить
- отключить схему (либо разомкнуть vpp и gnd)
Печатная плата: lcm3.lay (один из вариантов с форума vrtp).
На прилагаемой печатной плате контрастность дисплея 16*2 задаётся делителем напряжения на резисторах сопротивлением 18к и 1к. При необходимости нужно подобрать сопротивление последнего. FB — ферритовый цилиндрик, вместо него можно поставить дроссель. Для большей точности вместо резистора 180 Ом используются два по 360 в параллель. Перед установкой кнопки калибровки и переключателя режимов измерения, обязательно проверьте тестером их распиновку: часто встречается такая, которая не подходит.
Корпус для прибора, следуя традиции (раз , два), сделан из пластмассы и окрашен краской «чёрный металлик». Изначально прибор питался от зарядного устройства для мобильного телефона 5В 500мА через гнездо mini-USB. Это — не лучший вариант, так как питание подключалось к плате измерителя уже после стабилизатора, а насколько оно стабильно в зарядке от телефона — неизвестно. Затем внешнее питание было заменено на литиевый аккумулятор с модулем зарядки и повышающим преобразователем , возможные помехи от которого прекрасно убираются обычным LDO стабилизатором , присутствующим на схеме.
В заключение хочется добавить, что автор вложил в этот измеритель максимум возможностей, сделав его незаменимым для радиолюбителя.
В данной статье предлагается схема цифрового термометра на микроконтроллере AVR ATtiny2313, датчике температуры DS1820 (или DS18b20), подключенному к микроконтроллеру по протоколу 1-wire, и ЖК-дисплее 16×2 на контроллере HD44780. Описываемое устройство может найти широкое применение среди радиолюбителей.
Программа для микроконтроллера написана на ассемблере в среде AVR Studio. Монтаж выполнен на макетной плате, кварцевый резонатор на 4МГц, микроконтроллер ATtiny2313 можно заменить на AT90S2313, предварительно перекомпилировав исходный код программы. Погрешность датчика DS1820 около 0,5 С. В архиве также находится прошивка для случая если используется датчик DS18B20. Опрос датчика производится каждую секунду.
WAV-плеер собран на микроконтроллере AVR ATtiny85 (можно использовать ATtiny25/45/85 серии). У микроконтроллеров этой серии всего восемь ножек и два ШИМ (Fast PWM) с несущей 250kHz. Для управления картой памяти достаточно всего 6 проводов: два для питания и четыре сигнальные. Восемь ножек микроконтроллера вполне достаточно для работой с картой памяти, вывода звука и кнопки управления. В любом случае данный плеер очень прост.
С помощью данного измерителя ёмкости можно легко измерить любую ёмкость от единиц пФ до сотен мкФ. Существует несколько методов измерения емкости. В данном проекте используется интеграционный метод.
Главное преимущество использования этого метода в том, что измерение основано на измерении времени, что может быть выполнено на МК довольно точно. Этот метод очень подходит для самодельного измерителя ёмкости, к тому же он легко реализуем на микроконтроллере.
Данный проект был сделан по просьбе друга для установки на дверь в складское помещение. В дальнейшем было изготовлено ещё несколько по просьбе друзей и знакомых. Конструкция оказалась простой и надёжной. Работает данное устройство так: пропускает только те RFID-карты, которые были заранее занесены в память устройства.
Свет и вытяжка в санузле.
Сенсорный кодовый замок.
Сенсорная кнопка включения ПК.
Когда ПК выключен ничего не горит и не работает.
При касании сенсора подсветка откликается короткой вспышкой, далее замыкаются контакты
релеи остаются в замкнутом положении до тех пор, покана2 ноге МК не появится пониженныйдо +5 вольт сигнал с +12 вольтовой шиныБП компьютера, кактолько сигнал получен контакты реле размыкаются,и плавно включается подсветкасенсора. Если напряжение +12 вольт не появилось в течение -2 секунд, реле выключается, и подсветка двойным миганием показывает код неисправности, для сброса
нужно обесточить компьютер.Для выключениядостаточно зажать сенсор на 3 секунды и МК произведёт жесткое выключениеПК. При этом контакты реле замыкаются и держатся до тех пор, пока на 2
ногене пропадёт сигнал +12вольт с БП компьютера.Как только +12 вольт пропали, сенсор отпускает контакты реле и выключает подсветку.
Для контроля работы сенсора во время удержания подсветка мигает.Схему вешать на питание дежурной линии стенбай в 5 вольт. При программном выключении компьютера подсветка потухнет, как только пропадет 12 вольтовое питание.
МЕГА ИК ПРИЕМНИК НА 35 КАНАЛОВ.
Поддержка пультов с протоколом NEC. Первой записываем«Мастер» кнопку на пульте. Используя ее, включим режим перезаписи кнопок пульта в память МК. Далеезаписываем 35 выбранных кнопок на пульте ДУ.
Соответствие записываемых команд к ножкам МК, первая команда принадлежит ноге 2 и так далее по кругу против часовой стрелки, пропуская ножки питания МК(свежее запрограммированный МК сразу после подачи питания готов к записи команд с пульта в свою память). После подачи питания светодиод с 2 ноги три раза мигает и МК готов к записи, при проведении записи кнопки, он же мигает, говоря о проведении записи, после записи последней 35 кнопки его свечение немного длиннее. Когда он потухнет МК готов к работе.
В памяти EEPROM можно настроить режим работы каждой ножки в режим переключения или удержания. Для этого начиная с адреса 02 EEPROM по 06 адрес необходимо записать правильные числа, которые получаем следующим способом. Ножки «сгруппированы» по 8 штук, так как в одном регистре памяти EEPROM в МК всего 8 бит. Допустим, мы хотим, чтоб первые три ножки работали в режиме удержания, а остальные 5 в режиме переключения. Записываем число 1 для ноги, которая будет работать в режиме удержания и число ноль для режима переключения. Отсюда получаем такой вид числа в двоичной системе 00000111 – первая ножка считается справа налево, данное число нужно перевести в шестнадцатеричный вид, что в данном случае легко, но может потребоваться конвектор чисел. Получаем число 07 в шестнадцатеричном виде готовое к записи в программаторе. Также поступаем и для настройки остальных выводов. В текущей прошивке все выводы настроены в режиме удержания (записаны числа -FF). В последней ячейке по адресу 06 памяти EEPROM используем только три первых бита, остальные не используются (00000111).
Свет и вытяжка в санузле.
Девайс предназначен, для управления включения света и вытяжного вентилятора, в санузле.
В выключенном режиме подсветка выключателя постоянно светится.
При включении выключателя происходит плавный розжиг лампы освещения (продлеваем срок службы лампы), после чего сразу включается вытяжной вентилятор. Подсветка начинает мигать, сообщая, что помещение занято. Если забыли выключить свет, он автоматически выключится через час и подсветка потухнет, чем сообщает причину выключения.
Выключатель необходимо вернуть в положение — выключено, сразу включится подсветка, после чего можно снова использовать в штатном режиме.После ручного выключения света подсветка переходит в штатный режим (светит постоянно), вытяжной вентилятор работает еще три минуты.
Конструктивно схема рассчитана на прокладку новой проводки,
что и сделал мой кум при постройке санузла.
Второй вариант прошивки для экономок, схема стала проще. Схема. Прошивка.
12 командный ИК приемник на PIC12F629
Устройство позволяет записать в память МК 12 команд с пульта ИК и их прием отображать на своих выводах в двоичном виде в режиме удержания кнопок, после отпуска кнопки пульта на выходах МК будут нули.
Для управления драйвером подойдет любой ИК пульт от бытовой техники с протоколом NEC. Дальность приема зависит от места установки приемника и используемого пульта.
Как определить пригодность пульта и запрограммировать кнопки. На схему подаем питание, светодиод на плате три раза «мигнет»говоря о готовности к записи.
Далее нажимаемпоочередно 12 кнопок во время программирования при нажатии очередной кнопки светодиод на плате « вспыхивает»сообщаяобуспешной записи. По окончанию программирования светодиодтри раза мигнет и больше не реагирует наприем команд,а переходит в режим сканирования кнопки.
Если произведен не правильный набор командили для смены пульта, необходимо нажать кнопку на устройстве и повторить набор, кнопка активнатолько после завершения ввода всех команд.
Вывод данных в двоичном виде на ногах 7-6-5-3. То есть, выводится номер, принятой команды в соответствии очередности их записи. Первая записанная команда принята — выводится число 1 и т.д. В режиме покоя на выводах 0000.
ИК управление электро приводом -2.
Упрощенный вариант.
Устройство предназначено для управления электроприводом исполнительного устройства выполняющие действие открытия и закрытия любого механизма, например ворот, штор, выезд телевизора и т.д. Определение выполненного действия происходит с помощью двух концевых выключателей, которые в свободном положении нормально разомкнутые.
Программа ИК приемника универсальная поддерживает практически все протоколы пультов. Запись пульта можно провести, если с состояния выключенного питания нажать и удерживать кнопку «запись пульта» после подачи питания отпустить и нажать на пульте выбранную кнопку. Кнопку пульта необходимо удерживать белее трех секунд, после отпуска кнопки устройство готово к использованию, код кнопки запишется в память МК и повторной записи не потребуется, если было отключено питание устройства (для перезаписи кнопки пульта процедуру нужно повторить).
Несколько улучшенная прошивка, исправлен ПИН код, теперь можно в любой последовательности выбирать цифры для кода. Улучшен звук. И в архиве два варианта с разной чувствительностью сенсоров. Хоть подобные схемы и рассчитываются на определение изменения емкости площадок сенсоров, но на работу устройства довольно сильно влияет применяемый блок питания и также помещение, в котором девайс будет работать. Поэтому теперь есть возможность подобрать прошивку, работающую с лучшими показателями.
Изменения — есть возможность самостоятельно настроить время вывода сигнала на исполнительное устройство после правильного набора ПИН кода, производится изменением чисел в памяти EEPROM в ячейках идущих сразу после ПИН кода по адресу 05H и 06H. Время можно вычислить по расчету Время в секундах= ADR_05H (1- ноль не записывать)* ADR_06H (50- цифры в десятичной системе)* 0.02 секунды = получаем задержку в 1 секунду. Теперь еще индикации светодиода нажатой цифры с 8 ноги МК, как таковой нет, вместо этого на выводах 11-10-9-8 выводится число нажатой кнопки в двоичном виде, 8 нога младший БИТ и далее.
Использовав дешифратор типа 155ИД3 можно получить эквивалент каждой цифре свой выход (светодиод).
P.S. Числа для записи в EEPROM надо конвертировать, программаторы не поддерживают десятичную систему исчисления.
Микроконтроллеры PIC
Микроконтроллеры PIC
Практически каждая фирма, выпускающая электронные микросхемы имеет в составе своей продукции и микроконтроллеры. Тем не менее, наибольшей популярностью пользуется лишь узкий круг изделий. К таким элементам можно отнести микросхемы фирмы Microchip Inc, под общим названием PIC и микроконтроллеры под торговой маркой AVR, выпускаемые фирмой Atmel. Ниже коротко приведен обзор видов микроконтроллеров от Microchip.
Американская фирма Microchip Inc. появилась на рынке микроконтроллеров в 1989 году. К началу 21 века, она была уже вторым по величине производителем 8-ми битных устройств, уступая лишь компании Motorola. Сегодня микроконтроллеры PIC являются одними из самых популярных в любительских и профессиональных разработках, благодаря своей простоте и высокой надежности.
В производстве компании Microchip, находится большое число самых разнообразных устройств, имеющих общую торговую марку Микроконтроллеры PIC (PIC microcontrollers). Все они разделены на несколько семейств, описанных ниже.
PIC10. Микроконтроллеры с смаыми маленькими возможностями. Предоставляют разработчику 4 линии ввода/вывода и корпус с 6 ножками.
PIC12. Простые микроконтроллеры, выпускающиеся в корпусе с 8-ю выводами. Разрядность их составляет 8 бит, объем памяти программ часто не превышает 1 кБ. Наиболее интересными изделиями этой группы являются микросхемы, со встроенными радиопередатчиками серии rfPIC. Такие элементы очень активно используются в автомобильных сигнализациях и системах дистанционного управления.
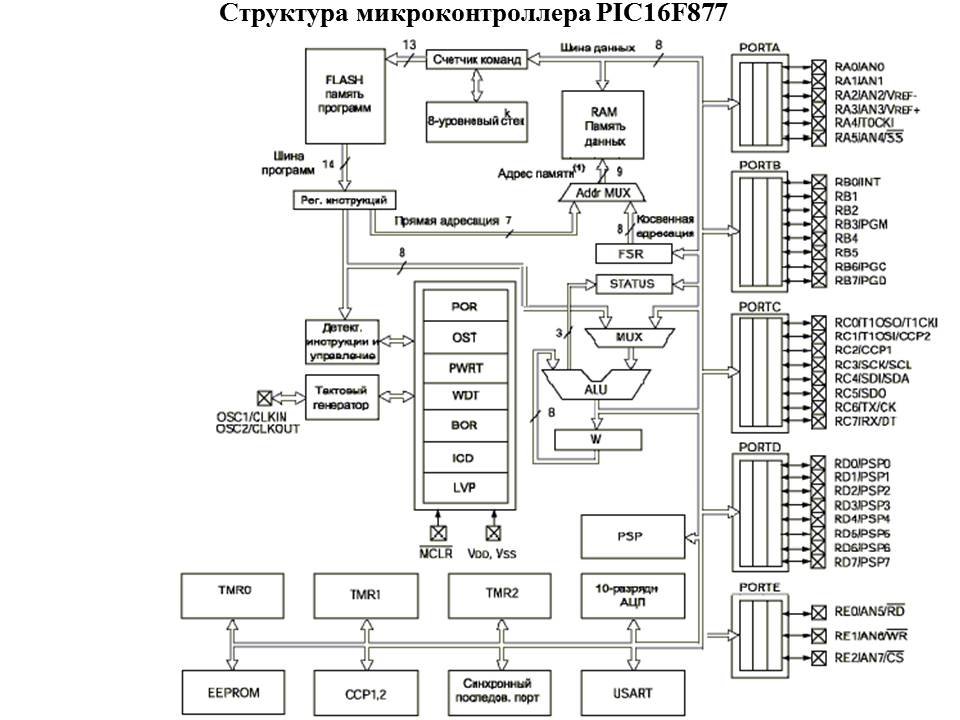
PIC16. Самые распространенные 8-ми битные микроконтроллеры. Выпускаются в корпусах с количеством выводов от 14 до 40. Основу всей серии составляет одно микропроцессорное ядро, дополняемой необходимыми периферийными устройствами. Именно микроконтроллеры серии PIC16 стали первым шагом для многих разработчиков электронной техники.
PIC18. Самые мощные 8-ми битные микроконтроллеры в линейке продукции Microchip. Изначально ориентированы на программирование с использованием языка высокого уровня C.
PIC24. Высокопроизводительные устройства, выполненные по 16-разрядной архитектуре. Предназначаются для применений, где 8-ми разрядные модели уже не справляются.
PIC32. Новое семейство, использующее 32-разрядную архитектуру MIPS. Являются самыми мощными устройствами, выпускаемыми фирмой Microchip. Хотя большого распространения пока не получили, эти микроконтроллеры являются одним из самых перспективных направлений развития продукции Microchip.
Микроконтроллеры от Microchip активно используются в промышленном оборудовании и бытовых устройствах. Их можно встретить в популярных программно-аппаратных платформах и отладочных платах, таких как EasyPIC или Amicus18. В чистом виде они работают в огромном числе самых разнообразных любительских микроконтроллерных проектов. Благодаря множеству достоинств и грамотной маретинговой политике производителя эти микросхемы PIC занимают вершину популярности, успешно конкурируя с продукцией Atmel.
You have no rights to post comments
PIC 327 Предупреждающий знак безопасности «Восприимчивость устройства к электростатическим разрядам» BRADY gws223314
На нашем сайте Вы можете приобрести «PIC 327 Предупреждающий знак безопасности «Восприимчивость устройства к электростатическим разрядам» BRADY gws223314 » по небольшой цене. В данной карточке можно ознакомиться с параметрами этого товара. Цена указана на сайте с НДС. Для получения дополнительных сведений обращайтесь к нашим менеджерам по номеру телефона 8 800 100-76-17. Если вы уже выбрали подходящий товар, оформите заказ через корзину или по e-mail, и сотрудники в течение часа свяжутся для его подтверждения. Если Вы ещё не определились с моделью, то сможете получить ответ от специалиста. «PIC 327 Предупреждающий знак безопасности «Восприимчивость устройства к электростатическим разрядам» BRADY gws223314 » отличается высоким надёжностью. Все товары из каталога можно оплатить любым удобным способом. Мы предоставляем хорошие скидки на оптовые заказы. На все товары распространяется официальная гарантия от вендора. Если вы не нашли на сайте требуемый продукт, то его наличие можно уточнить. Мы находимся в Москве и доставляем заказы по всей территории Российской Федерации. В Москве возможно получить товар из точки самовывоза или заказать быструю доставку курьером. По РФ мы доставляем заказы транспортными компаниями. Мы предоставляем полный набор сопроводительных документов для покупателя.
Работаем с любыми способами оплаты: принимаем наличные, предоплату и предоставляем кредит. Наш товар доставляется в любую точку России. Мы работаем с крупнейшими перевозчиками, которые доставят Ваш заказ быстро и надежно. Доставка по Москве зависит от стоимости и весогабаритов заказа. Возможна бесплатная доставка, условия обсуждаются с менеджером. Все цены указаны в рублях и включают НДС 20% (кроме лицензий на ПО). Работаем как с бумажными документами, так и с электронными через ЭДО.
Вы можете самостоятельно произвести оплату на сайте. После оформления заказа и одобрения его менеджером Вам будут предложены следующие варианты оплаты:
1. Банковской картой (Visa, MasterCard, Maestro, МИР).2. Банковским переводом для юридических и физических лиц по выставленному счету.
3. Электронными деньгами через платёжный сервис Яндекс Касса.
4. По частям через платёжный сервис Яндекс Касса.
|
Материал подготовил А. Кищин (UA9XJK). |
Электроника НТБ — научно-технический журнал — Электроника НТБ
Одно из основных направлений деятельности компании Microchip Technology – производство контроллеров семейства PIC, представленное 8-, 16- и 32-бит МК. Отличительная особенность семейства — хорошая преемственность входящих в него серий МК. Это и программная совместимость, совместимость по выводам, по отладочным средствам, общие универсальные библиотеки и стеки наиболее популярных коммуникационных протоколов. Номенклатура МК семейства PIC насчитывает более 500 различных контроллеров со всевозможными вариантами периферии, памяти, числа выводов, производительности, значений напряжения питания, температуры и т. п. В число МК семейства PIC входят и полноскоростные USB микроконтроллеры в корпусах с числом выводов от 28 до 100, с поддержкой функций устройство, хост и OTG.В 2008–2009 годы компания выпустила две новые серии МК – PIC18F1xK50 и PIC18F1xK22 в 20-выводных корпусах. Новые микросхемы серии K50 имеют несколько последовательных интерфейсов – USB 2.0, I2C, SPI и USART, что позволяет организовывать обмен данными между USB и другими интерфейсами. Кроме того, они оснащены 9-канальными, 10-разрядными АЦП и двумя компараторами, что существенно расширяет возможности ввода данных. Микроконтроллеры серии К22 не имеют USB-модуля, но обладают повышенным быстродействием.
Характеристики микроконтроллеров серии PIC18F1xK50 представлены в табл.1.
RISC-Ядро
Дополнительно к стандартным 75 командам ядра микроконтроллеров серии PIC18 новые МК PIC18F1xK50 поддерживают дополнительные восемь команд с косвенной и индексной адресацией, расширяющие функциональность ядра. В ядре новых МК для многих стандартных команд ядра МК серии PIC18 также реализована индексная адресация со смещением. Расширение системы команд по умолчанию запрещено. Для разрешения расширенных команд служит специальный бит XINST микроконтроллера. Таким образом, реализуется полная программная совместимость со стандартным ядром, если пользователь работает с новыми микроконтроллерами со старым программным обеспечением.
Расширенные команды предназначены для улучшения оптимизации программ и возможности создания рентерабельного кода на языках высокого уровня, например на Си. Наряду с прочим, расширенные системы команд позволяют компиляторам языков высокого уровня эффективно выполнять такие операции над данными, как:
* автоматическое размещение и освобождение области программного стека при входе и выходе из подпрограмм;
* вызов функции по указателю;
* манипулирование с указателями на программный стек;
* работа с переменными, расположенными в программном стеке.
Максимальная тактовая частота микроконтроллеров серии K50 составляет 48 МГц при напряжении питания 2,7–5,5 В, и 20 МГц при напряжении 1,8–2,7 В.
Интерфейсы
Модуль USB контроллеров PIC18F1xK50 поддерживает низкоскоростную (Low Speed – 1,5 Мбит/с) и полноскоростную (Full Speed– 15 Мбит/с) спецификации USB 2.0. Микросхемы контроллеров содержат двухпортовую оперативную память емкостью 256 байт, выделенную для работы с USB, поддерживают 16 конечных точек (по восемь на вход и на выход). Как и старшие микроконтроллеры семейства PIC18, новые МК содержат все компоненты, необходимые для прямого подключения к USB-хосту – встроенный USB модуль с трансивером, подтягивающие резисторы на линиях D+ и D- для задания скорости передачи шины. Но контроллеры серии К50 не способны работать с внешним USB-трансивером.
Устройства на базе МК семейства PIC18F1xK50 могут питаться от шины USB, от собственного источника питания или от комбинированного источника питания. Хост или хаб USB имеет резисторы с сопротивлением ~15 КОм, подтягивающие напряжение к «земле». При подключении микроконтроллера к шине USB и наличии внешних подтягивающих резисторов к напряжению источника питания, он может определять изменение состояния на выводах D+ и D-, выставлять флаг прерывания и включать модуль USB. Функция обнаружения USB-хоста, которая переводит микроконтроллер в режим пониженного энергопотребления, когда USB-соединение отсутствует, – важная особенность новых МК компании.
Помимо модуля USB контроллеры имеют модуль последовательного интерфейса EUSART и модуль синхронного последовательного интерфейса MSSP. Модуль EUSART поддерживает работу с интерфейсами RS-485, RS-232 и LIN 2.0. Благодаря наличию внутреннего стабилизированного и подстраиваемого RC-генератора, а также возможности автоматического определения скорости принимаемых данных МК может работать без внешнего кварцевого генератора. Модуль синхронного последовательного интерфейса MSSP позволяет работать в привилегированном (Master) и подчиненном (Slave) режимах с интерфейсами SPI и I2C.
Аналоговая периферия
Микроконтроллеры серии PIC18F1xK50 содержат всю присущую МК семейства PIC стандартную аналоговую периферию – 10-разрядный АЦП, два аналоговых компаратора, фиксированный и программируемый источник опорного напряжения. Из нововведений следует отметить наличие встроенного прецизионного источника фиксированного опорного напряжения на три значения – 1,024 В, 2,048 и 4,096 В. Источник опорного напряжения может использоваться как база для программируемого источника опорного напряжения (простейший ЦАП), может подключаться на вход АЦП и компараторов.
Выход программируемого источника опорного напряжения может также подключаться к входу АЦП и компараторов, а также поступать на вывод микроконтроллера для использования совместно с его внешними цепями.
Два встроенных аналоговых компаратора предоставляют полезные функции, независимые от исполняемого программного кода. Входной мультиплексор компараторов позволяет подключать их входы к тому или иному выводу микроконтроллера и источникам опорного напряжения. Выход компаратора может поступать на выходной порт МК, может вызывать прерывания, выводить МК из энергосберегающего режима ожидания (Sleep), а также выключать его ШИМ-модуль.
Интегрированный RS-триггер в связке с компараторами позволяет пользователям обрабатывать различные параметры окружающей среды – от регистрируемой температуры и влажности до данных емкостного контактного датчика, а также реализовывать импульсные преобразователи энергии, управление мощными светодиодами и многое другое.
Порты ввода-вывода.
Необычная особенность портов ввода-вывода контроллеров серий PIC18F1xKxx – это возможность затягивания фронтов выходных сигналов для минимизации электромагнитных излучений при переключении портов. Программист может выбирать «нормальный» режим или затянуть фронт переключения портов в десять раз. Эта особенность может пригодиться, например, при управлении по длинным линиям ЖК-индикаторами, сигнализаторами и другими устройствами, не требующими высокоскоростных сигналов управления.
Микроконтроллеры серии K50, как и все контроллеры К-серий, выполнены по 0,35-мкм КМОП-технологии. Максимальное напряжение питания ядра МК составляет 3,6 В. Однако МК «F» версии (PIC18F1xK50) имеют встроенный регулятор источника питания на напряжение 3,2 В (табл.2), обеспечивающий работу МК в диапазоне напряжения питания 1,8–5,5 В. При этом вся периферия также функционирует во всем диапазоне питающих напряжений, за исключением выводов RA1 и RA2 (D+ и D-), которые могут работать как входы с уровнями напряжения до 3,6 В или как линии USB-интерфейса. МК версий «LF» (PIC18LF1xK50) не имеют встроенного регулятора напряжения питания, поэтому они рассчитаны на напряжение питания 1,8–3,6 В.
Новые микроконтроллеры совместимы по выводам со всеми 20-выводными контроллерами компании Microchip, правда, один их вывод выделен для подключения конденсатора, предназначенного для стабилизации внутреннего регулятора напряжения USB-модуля. Совместимость по выводам как с предыдущими контроллерами, так и с выпущенным позже семейством PIC18F1xK22 (контроллеры с аналогичными характеристиками, но без модуля USB), позволит унифицировать печатную плату под системы, выполняющие различные задачи, или с минимальными доработками интегрировать USB-интерфейс в существующую разработку.
Микроконтроллеры PIC18F1xK50 выпускаются в 20-выводных корпусах типа SSOP, SOIC, PDIP и миниатюрном корпусе QFN размером 5×5 мм. Диапазон рабочих температур составляет -40…125°С.
Поскольку МК PIC18LF1xK50 выполнены по технологии экстремально-низкого потребления – eXtrime Low Power (XLP), потребляемый ими ток в режиме ожидания составляет 24 нА, потребляемый ток сторожевого таймера – 450 нА, таймера 1 – 790 нА (в режиме часов реального времени с кварцевым генератором на частоту 32768 Гц).
Новые контроллеры поддерживаются всеми средствами отладки компании Microchip (программаторами-отладчиками PICkit2, PICkit3, ICD-2, ICD-3 и внутрисхемным эмулятором REAL ICE). Однако, как и для всех МК с малым числом выводов, для внутрисхемной отладки необходим специальный отладочный модуль. На плате отладочного модуля установлен специальный микроконтроллер PIC18F14K50-ICD, который содержит модуль теневой отладки и имеет дополнительные выводы, выделенные для внутрисхемной отладки.
В помощь разработчику компания Microchip выпускает демонстрационный комплект Low Pin Count USB Development Kit (номер для заказа DV164126). Этот демонстрационный комплект содержит все устройства, необходимые для начала работы и освоения маловыводных микроконтроллеров с USB (см. рисунок):
* демонстрационную плату с микроконтроллером PIC18F14K50 и одну плату без установленных компонентов для самостоятельной сборки;
* отладочный модуль для внутрисхемной отладки контроллеров семейства PIC18F1xK50;
* внутрисхемный отладчик-программатор PICkit2;
* компакт-диск с необходимым программным обеспечением, примерами программ и лабораторными работами для освоения USB-микроконтроллеров.
Новые USB-контроллеры поддерживаются готовыми USB-библиотеками копании Microchip. Пакет программ MCHPFS USB Framework содержит программы реализации различных классов USB-устройств. Для контроллеров PIC18F14K50 приведены примеры реализации коммуникационного CDC класса (виртуальный COM-порт через USB), различных устройств взаимодействия человек-машина (манипулятор мышь, джойстик, пользовательское устройство), устройство хранения данных – MSD, составное устройство (реализация HID и MSD через одно USB-соединение).
Микроконтроллеры Microchip PIC18F1xK22
Выпущенные компанией Microchip МК PIC18F13K22 и PIC18F14K22 отличаются от МК серии PIC18F1xK50 отсутствием модуля полноскоростного USB 2.0 и увеличенной до 64 МГц тактовой частотой ядра (табл.3).
При напряжении питания 1,8 В потребляемый ток МК серии PIC18F1хK22, которые также выполнены по технологии nanoWatt XLP, в режиме Sleep составляет всего 34 нА, сторожевого таймера –300 нА, таймера с кварцевым генератором на частоту 32 КГц – 800 нА.
Благодаря низкой цене, ультранизкому потреблению, малым габаритам, обширной коммуникационной и аналоговой периферии новые XLP МК серий PIC18F1xK50 и PIC18F1xK22 найдут широкое применение в преобразователях интерфейсов, датчиках, периферийных USB-контроллерах. Совместимость кода со старшими семействами и готовые примеры реализации различных классов USB-устройств помогут программистам легко и быстро освоить новые семейства маловыводных микроконтроллеров компании Microchip.
Разработка и описание работы устройства на PIC-контроллере курсовая 2010 по коммуникациям и связи
Содержание: ВВЕДЕНИЕ 1. СОСТАВЛЕНИЕ СХЕМЫ ЭЛЕКТРИЧЕСКОЙ СТРУКТУРНОЙ 2. СОСТАВЛЕНИЕ СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ФУНКЦИОНАЛЬНОЙ 3. ОПИСАНИЕ ЭЛЕМЕНТНОЙ БАЗЫ 3.1 Резисторы 3.2 Конденсаторы 3.3 Резонатор 3.4 Светодиодный индикатор АЛ304Г 3.5 Диоды 3.6 Микросхемы 3.6.1 Микроконтроллер PIC16F84 3.6.2 Микросхема КР142ЕН5А 4. ОПИСАНИЕ РАБОТЫ СХЕМЫ ЭЛЕКТРИЧЕСКРОЙ ПРИНЦИПИАЛЬНОЙ ВЫБРАННОГО УСТРОЙСТВА 5. АЛГОРИТМ РАБОТЫ УСТРОЙСТВА И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ 6. ЗАКЛЮЧЕНИЕ 7. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ПРИЛОЖЕНИЕ А Введение Однокристальные микроконтроллеры стремительно занимают ведущее место в электронной аппаратуре. И если каких-нибудь десять лет назад они могли быть использованы при проектировании только профессионалами — слишком много требовалось дорогостоящих средств для их программирования, — то сегодня «однокристалки» используют даже радиолюбители. Именно микроконтроллер сегодня формирует облик бытовой аудиотехники, видеотехники, средств связи. С передних панелей радиоприемников, магнитол, телевизоров исчезли шкальные индикаторы, ручки настройки, ползунковые регуляторы, переключатели. Их заменили жидкокристаллические табло и кнопки. Десятки разнообразных микросхем, составляющих электронное «нутро» аппаратуры, должны согласованно функционировать, обеспечивая наилучшие технические характеристики и удобство эксплуатации. Решая задачу сопряжения цифровых устройств, разработчики компьютерной техники связали их между собой посредством шин, а способы передачи информации назвали протоколами и стандартизировали их основные принципы. Каждое устройство было снабжено интерфейсом, посредством которого стало возможным подключать его к шине. Если говорить об аналоговой технике, то специализированные аналоговые микросхемы испокон веков имели уникальные собственные выводы для подключения элементов, с помощью которых устанавливались их рабочие режимы или осуществлялись регулировки в процессе эксплуатации. Объединять эти выводы с целью выполнения универсальной регулировки не представлялось возможным. Современные микросхемы, предназначенные для использования в новой аппаратуре, снабжены цифровым интерфейсом, «спрятали» настроечные выводы внутрь микросборок, а управлять их режимами программно. Осуществлять управление одной микросхемой очень просто, для этого 2 Составление схемы электрической функциональной Схема электрическая функциональная представлена на рисунке 2.1 Рисунок 2.1 — Схема электрическая функциональная 3 Описание элементной базы 3.1 Резисторы (номиналы см. принципиальную схему) R3-R10 – резисторы С2-23 не проволочные постоянного сопротивления, мощностью 0,125Вт с номинальными сопротивлениями R3-R9 430 Ом, R2 10 кОм с допуском ±10%. R1- не проволочный постоянного сопротивления, мощностью 0,5 Вт с номинальным сопротивлением 34 кОм. 3.2 Конденсаторы С1 и С2 – конденсаторы К10-17 керамические не полярные постоянной емкости с группой по ТКЕ – Н90, с номинальным напряжением 25В, номинальной емкостью 30 пФ с допуском ±10%. C3 – 0,01 мкФ. 3.3 Резонатор ZQ – кварцевый резонатор, работающий на частоте параллельного резонанса 32768 Гц. 3.4 Светодиодный индикатор АЛ304Г АЛ304А, АЛ304Б, АЛ304В, АЛ304Г Индикаторы знакосинтезирующие, на основе соединения арсенид – фосфид –галлий, эпитаксиально – планарные [41, стр. 475 – 478]. Предназначены для отображения цифровой информации. Индикаторы имеют 7 сегментов и децимальную точку. Выпускаются в пластмассовом корпусе. Высота знака 3 мм. Масса прибора не более 0,25 г. Рисунок 3.1 – Структурная схема и монтажные размеры модулей АЛ304Г: 1 – катод e; 2 – катод d; 3, 8 – анод общий; 4 – катод c; 5 – катод h; 6 –катод b; 7 – катод a; 9 – катод g; 10 – катод f. 3.5 Диоды VD1 – стабилитрон КС147А Uст. = 4,23-5,17В Iст. = 58мА, VD2 – диод КД102. Таблица 3.1- Электрические параметры КД102 Uоб/Uимп В/В Iпр/Iимп А/А Uпр/Iпр В/А Io(25)Ioм мкА/мкА Fmax кГц 250/250 0.1/2 1.0/0.05 0.1/50 4 1. Триггер Шмитта на входе применяется, только если вывод сконфигурирован, как вход внешнего прерывания. 2. Триггер Шмитта на входе применяется только в режиме последовательного программирования кристалла. 3. Триггер Шмитта на входе применяется только если включен режим RC-генератора, в остальных случаях как CMOS вход. Микроконтроллеры PIC16F84 могут программироваться непосредственно на плате устройства, что позволяет отлаживать программу либо записывать константы и калибровочные данные. Для программирования на плате необходимо максимум пять проводов: питание +5В, напряжение программирования, последовательные данные, тактирующие импульсы и общий. Память программ только встроенная. Таблица 3.3 — Электрические параметры Параметр Значение Примечание Рабочая температура Та,°С 0 … +40 -40… +85 Коммерческое исполнение. Индустриальное исполнение Максимальная тактовая частота Fosc, МГц 4 10 PIC16F84-4 PIC16F84-10 Напряжение питания Vdd,B 2,0… 6,0 4,0… 6,0 PIC16LF84 PIC16F84 Потребляемый ток в стандартном режиме Idd, мА 1,8 …4,5 5… 10 Fosc=4 МГц, Vdd=5.5 В Fosc=10MГц, Vdd=5.5B Потребляемый ток в стандартном режиме Idd, мA 1 …4 15… 45 Fosc=2 МГц, Vdd=5.5 В Fosc=32 кГц, Vdd=2.0 В, WDT отключен Потребляемый ток в режиме SLEEP Ipd, мкА для PIC16F84 7… 28 1 … 16 1 … 14 Vdd=4 В, WDT вкл., инд. Vdd=4 В, WDT выкл., инд. Vdd=4 В, WDT выкл., комм. Потребляемый ток в режиме SLEEP Ipd, мкА для PIC16LF84 3… 16 0,4 …9 0,4… 7 Vdd=2 В, WDT вкл., инд. Vdd=2 В, WDT выкл., инд. Vdd=2 В, WDT выкл., инд. Максимальный втекающий ток для любого вывода, мА 25 Управление светодиодами без дополнительного буфера (но с резистором!) Максимальный вытекающий ток для любого вывода, мА 20 Управление светодиодами без дополнительного буфера (но с резистором!) Количество циклов стирание/запись для флэш- памяти программ, не менее 1000 Количество циклов стирание/запись для памяти данных EEPROM, не менее 10.000.000 Организация памяти. В микроконтроллерах PIC16F84 существует два блока памяти — память программ и память данных. Каждый блок имеет собственную шину, таким образом, доступ к блокам может происходить одновременно. Память данных, в свою очередь, разделена на специальные регистры и регистры общего применения (ОЗУ пользователя). Специальный регистры применяются для хранения битов состояния, определяющих работу портов вода/вывода, таймеров и других периферийных модулей контроллера. Кроме специальных регистров и ОЗУ, пространство памяти данных содержит ячейки EEPROM. Эта область памяти не может быть адресована непосредственно, и доступ к ней получают через специальный регистр косвенной адресации EEADR, в который записывают порядковый номер ячейки. 64 байта EEPROM имеют номера с 00h по 3Fh. Обычно EEPROM используется для хранения констант, значения которых не должны пропадать при отключении питания, например кодов управления, индивидуальных номеров и т.п. Важным достоинством EEPROM является то, что данные в ней могут быть изменены даже после занесения программы в однократно программируемый кристалл. Память программ. Микроконтроллеры PIC16F84 имеют 13-битный программный счетчик, позволяющий адресовать до 8К х 14 памяти программ. В PIC16F84 доступны первые 1024 (0000h-03FFh) ячеек памяти. Обращение к старшим адресам, лежащим за пределами указанного диапазона физически равносильно обращению к соответствующим адресам внутри диапазона, например, адреса 30h, 430h, 830h, C30h, 1030h, 1430h, 1830h и 1C30h равносильны и адресуют одну и ту же команду. Старт по сбросу происходит с адреса 0000h, вектор прерывания один и расположен по адресу 0004h. Обычно по адресу 0004h располагают подпрограмма распознавания и обработки прерываний, а по адресу 0000h команду перехода на метку, расположенную за подпрограммой обработки прерывания. Память данных. В микроконтроллерах PIC16F84 память данных разбита на две части — специальные регистры и регистры общего применения (ОЗУ пользователя). Кроме этого, память данных разделена на два банка. Таблица 3.4 — Организация памяти данных Адрес Адрес 00h Косвенный адрес Косвенный адрес 80h 0lh TMR0 OPTION 81h 02h PCL PCL 82h 03h STATUS STATUS 83h 04h FSR FSR 84h 05h PORTA TRISA 85h 06h PORTB TRISB 86h 07h Недоступен Недоступен 87h 08h EEDATA EECON1 88h 09h EEADR EECON2 89h 0Ah PCLATH PCLATH 8Ah 0Bh INTCON INTCON 8Bh 0Ch 4Fh 68 регистров общего применения (SRAM) Отображается на пространство банка 0 8Ch CFh 50h 7Fh D0h FFh Банк 0 Банк 1 1 = нагрузка отключена 0 = нагрузка включена bit6 INTEDG — выбор фронта прерывающего сигнала 1 = прерывание по нарастанию сигнала на выводе RB0/INT 0 = прерывание по спаду сигнала на выводе RB0/INT bit5 TOGS — выбор источника тактирования для таймера TMR0 1 = импульсы со входа RA4/T0CKI 0 = внутренняя тактовая частота (CLKOUT) bit4 T0SE — выбор фронта сигнала для таймера TMR0, если в качестве источника выбран вход RA4/T0CKI (T0CS=l) 1 = инкремент по спаду на выводе RA4/T0CKI 0 = инкремент по нарастанию на выводе RA4/T0CKI bit3 PSA — бит, управляющий подключением предварительного делителя 1 = предварительный делитель подключен к WDT 0 = предварительный делитель подключен к TMR0 bit2-0 PS2-PS0 — управление коэффициентом деления предварительного делителя в зависимости от подключения Биты для TMR0 для WDT 000 1:2 1:1 001 1:4 1:2 010 1:8 1:4 011 1:16 1:8 100 1:32 1:16 101 1:64 1:32 110 1:128 1:64 111 1:256 1:128 Регистр INTCON (АДРЕС 0ВН, 8ВН) Регистр INTCON — это полностью доступный для чтения и записи регистр, в котором хранятся биты, управляющие различными источниками прерываний. bit7 GIE — бит глобального запрета прерываний 1 = разрешены все немаскируемые прерывания 0 = запрещены все прерывания bit6 EEIE — разрешение прерывания по окончанию записи в EEPROM 1 = прерывание по окончанию записи разрешено 0 = прерывание по окончанию записи запрещено bit5 T0IE — разрешение прерывания по переполнению TMR0 1 = прерывание разрешено 0 = прерывание запрещено bit4 INTE — разрешение прерывания по входу RB0/INT 1 = прерывание разрешено 0 = прерывание запрещено bit3 RBIE — разрешение прерывания по изменению состояния на входах порта В, линии RB7-RB4 1 = прерывание разрешено 0 = прерывание запрещено bit2 T0IF — флаг прерывания по переполнению таймера/счетчика TMR0 1 = TMR0 был переполнен (следует сбросить программно!) 0 = TMR0 не был переполнен Флаг используется для определения источника прерывания, bit1 INTF — флаг прерывания по входу RB0/INT 1 = произошло прерывание по входу RB0/INT (следует сбросить программно!) 0 = не происходило прерывания по входу RB0/INT Флаг используется для определения источника прерывания. bit0 RBIF — флаг прерывания по изменению состояния на входах RB7- RB4 1 = на одном из выводов RB7-RB4 произошло изменение уровня (следует сбросить программно!) 0 = не происходило прерывание по изменению уровня Флаг используется для определения источника прерывания. Программный счетчик. Программный счетчик микроконтроллера (PC) содержит 13 разрядов. Младший байт счетчика является полностью доступным для чтения и записи регистром PCL (адрес 02h, 82h). Старшие пять байтов счетчика непосредственно не доступны для чтения и записи. Обращение к ним происходит через регистр PCLATCH (адрес 0Ah, 8Ah), являющийся буфером- защелкой для старших битов счетчика. Содержимое PCLATCH переносится в старшие биты PC, когда происходит запись нового значения в программный счетчик. Это случается, когда выполняются команды CALL, GOTO или регистр PCL является регистром назначения для результата арифметической операции. Стек Микроконтроллеры PIC16F84 имеют 8-уровневый 13-битный аппаратный стек. Стек не является частью памяти данных или программ и указатель стека не доступен для чтения или записи. Косвенная адресация: регистры INDF и FSR Регистр INDF не является физическим регистром. При обращении к этому регистру на самом деле адресуется регистр, адрес которого указан в регистре FSR (т.е. FSR является указателем). Такая адресация является косвенной. Порты ввода-вывода Контроллеры PIC16F84 имеют два порта ввода-вывода, PORTA и PORTB. Каждый вывод порта может быть запрограммирован на ввод или на вывод установкой соответствующего бита в регистрах TRISA и TRISB. Выводимые значения фиксируются в регистрах-защелках PORTA и PORTB. Направление ввода-вывода может быть изменено в произвольный момент времени. Двунаправленный порт А, регистры PORTA и TRISA Регистр PORTA представляет собой 5-битную защелку. Линия RA4 имеет триггер Шмитта на входе в режиме ввода и открытый сток в режиме вывода. Остальные линии порта А по входу работают со стандартными Рисунок 3.4 — Блок-схема порта В, линии RB7-RB4 (а) и RB3-RB0 (b) Модуль TIMER0 и регистр TMR0 TIMER0 является программируемым модулем таймера/счетчика. Он имеет в своем составе: • 8-битный таймер/счетчик TMR0, доступный для чтения и записи как регистр, •программируемый предварительный делитель (предделитель) мультиплексор входного сигнала • генератор прерывания по переполнению регистра TMR0 с FFh в 00h. Предделитель Предделитель является 8-битным счетчиком, который также может быть использован, как выходной делитель (постделитель) сторожевого таймера. Если предделитель подключен к модулю TIMER0, то он не может использоваться со сторожевым таймером, и наоборот. Когда предделитель подключен к таймеру/счетчику, все команды, использующие запись в регистр TMR0, обнуляют предделитель. Если предделитель подключен к сторожевому таймеру, они обнуляются совместно, командой CLRWDT. Предделитель недоступен для прямой записи или чтения. Подключение предделителя может быть изменено «на лету», то есть во время выполнения программы. Работа с EEPROM Память данных EEPROM доступна для чтения и записи во всем рабочем диапазоне питающих напряжений и предназначена для хранения 8- битных значений. Перед записью нового значения предыдущее стирается. Микроконтроллеры PIC16F84 имеют 64 байта EEPROM с адресами от 00h до 3Fh, но эти ячейки недоступны путем прямой адресации в адресном пространстве микроконтроллера. Для доступа к ним используется косвенная регистровая адресация через специальные регистры. Всего при работе с EEPROM используется четыре специальных регистра: • EECON1 • EECON2 • EEDATA • EEADR Регистр обмена EEDATA содержит 8-битные данные чтения/записи. EEADR хранит адрес ячейки, к которой происходит обращение. Несмотря на то, что в PIC16F84 физически существует только 64 байта EEPROM, декодируются все биты адреса. Поэтому необходимо следить за значением в EEADR, чтобы не выйти за пределы адресного пространства. При записи в EEPROM требуется строго выдерживать временной интервал, который контролируется встроенным таймером. Время записи может варьироваться от кристалла к кристаллу, а также в зависимости от питающего напряжения и температуры. Когда у микроконтроллера установлен бит защиты кода, процессор может читать и записывать EEPROM, но для программатора эта память становится недоступна. Регистры EECON1 и EECON2 Регистр EECON1 является контрольным регистром, у которого физически доступны младшие пять бит. Старшие три недействительны и всегда читаются как «0». bit 7-5 Физически недоступны, всегда читаются как «0» bit 4 EEIF — флаг прерывания по окончанию записи 1 = запись завершена (должен быть сброшен программно) 0 = запись не завершена или не начиналась bit 3 WRERR — флаг ошибки записи в EEPROM 1 = запись преждевременно прервана 0 = запись прошла успешно bit 2 WREN — разрешение записи в EEPROM 1 = разрешен цикл записи 0 = запрещена запись bit1 WR — бит управления записью 1 = начать цикл записи. Программная установка бита является командой начать цикл записи. Сбрасывается этот бит только аппаратно, когда цикл записи окончен. 0 = цикл записи данных завершен bit1 RD — бит управления чтением 1 = начать чтение данных из EEPROM. Чтение занимает один командный цикл. Программная установка бита является командой начать чтение. Бит сбрасывается только аппаратно. 0 = чтение не начато Невозможность программно сбросить бит WR предохраняет от случайного преждевременного прерывания цикла записи, поскольку этот цикл занимает несколько машинных тактов. Бит WREN при включении питания сброшен, что предохраняет от случайной записи. Бит WRERR устанавливается, когда операция записи прервана сбросом по входу MCLR или сбросом по переполнению сторожевого таймера. В этом случае, при повторном старте, пользователь может проверить бит WRERR и, при необходимости, повторить запись. Данные и адрес в регистрах EEDATA и EEADR при сбросе не теряются. Регистр EECON2 не является физическим регистром и используется исключительно в качестве служебного регистра при записи. Чтение этого регистра всегда возвращает значение «0». Чтение данных из EEPROM Для чтения данных необходимо записать адрес в регистр EEADR и установить бит RD регистра EECON1. В следующем цикле данные уже доступны для чтения из регистра EEDATA. Прочитанные данные хранятся в этом регистре, пока не будут прочитаны новые данные или пока в него не будут занесены данные для записи. Запись данных в EEPROM Для записи данных в EEPROM необходимо сначала записать адрес в регистр EEADR и данные для записи в регистр EEDATA, а затем выполнить обязательную последовательность команд, рекомендованных изготовителем: MOVLW 55h При напряжении питания больше 4,5 В изготовитель рекомендует применять конденсаторы со значениями С1 = С2 = 30 пФ. Рисунок 3.6 — Схема подключения внешнего генератора При использовании независимого внешнего генератора, его схема может быть любой. Выход генератора подключается к выводу OSC1, вывод OSC2 обязательно должен остаться свободным, в противном случае контроллер может выйти из строя. Контроллер в этом случае настраивается в режим XT, LP или HS. Если приложение некритично к величине и стабильности тактовой частоты, можно применить недорогой RC-генератор. Резистор и конденсатор являются внешними элементами. Рекомендуемый номинал резистора лежит в пределах от 5 кОм до 100 кОм. При использовании резистора менее 4 кОм генерация может быть нестабильной или вообще не возникнет. При слишком большом номинале, порядка 1 МОм и выше, на работу генератора начинают влиять внешние наводки и шумы схемы, а также монтажная емкость и влажность платы. Несмотря на то, что генератор может работать вообще без внешнего конденсатора, рекомендуется применять конденсатор с емкостью порядка 20 пФ для увеличения стабильности и помехоустойчивости генератора. Рисунок 3.7 — Схема внешнею RC-генератора Частота тактового генератора зависит от мигающего напряжения, номиналов резистора и конденсатора и варьируется от кристалла к кристаллу. В режиме RC с вывода OSC2/CLKOUT можно снимать импульсы с частотой одна четвертая от тактовой и использовать эти импульсы для тактирования или синхронизации остальной схемы. Когда контроллер настроен в режим RC, на его вывод OSC1/CLKIN нельзя подавать импульсы от внешнего генератора, так как можно вывести кристалл из строя. Организация сброса. Для PIC16F84 доступны следующие пять вариантов сброса: • Сброс по включению питания • Сброс по входу MCLR во время нормальной работы • Сброс по входу MCLR в режиме SLEEP • Сброс по переполнению сторожевого таймера (WDT) во время нормальной работы • Сброс по переполнению сторожевого таймера (WDT) в режиме SLEEP Если питающее напряжение при включении устанавливается достаточно быстро, не дольше, чем за 70мс, то можно обойтись без внешней цепи сброса и подключить вывод MCLR непосредственно к плюсовой шине питания. При достижении питающим напряжением уровня 1.2-1.7V сформируется внутренний сигнал сброса и начнется отсчет времени задержки сброса специальным внутренним таймером PWRT (Power-up timer). За это время питающее напряжение должно подняться до нормального рабочего уровня. Таймер PWRT работает от независимого встроенного RC- генератора, время задержки равняется примерно 72мс и может несколько изменяться от кристалла к кристаллу, а также в зависимости от температуры. После окончания задержки таймера PWRT включается таймер запуска основного тактового генератора, но он тактируется непосредственно от этого генератора и отсчитывает 1024 импульса. Таймер PWRT может быть включен или выключен изменением бита PWRTE в слове конфигурации. Если питающее напряжение нарастает медленно, может понадобиться внешняя цепь сброса. Рисунок 3.8 — Внешняя цепь сброса Организация прерываний Микроконтроллеры PIC16F84 имеют четыре источника прерываний: • Внешнее по входу RB0/INT • Внешнее по изменению состояния одной из линий RB4-RB7 порта В • Внутреннее по переполнению таймера/счетчика TMR0 • Внутреннее по окончанию записи в EEPROM. Для каждого из прерываний 1, 2 и 3 существует свой флаг-бит в регистре INTCON, сигнализирующий о поступлении конкретного вида запроса. Для прерывания 4 флаг-бит хранится в регистре EECON1. Анализируя эти биты подпрограмма обработки прерываний, начинающаяся с адреса 0004h, определяет источник прерывания. Кроме этого, в регистре INTCON содержится бит глобального запрета прерываний GIE и биты индивидуального запрета каждого прерывания. Когда бит GIE сброшен, все прерывания запрещены. При включении питания бит GIE по умолчанию сброшен. Когда поступает прерывание, бит GIE сбрасывается, чтобы не допустить возникновения нового прерывания (поскольку у микроконтроллера PIC16F84 существует только один вектор прерывания), адрес возврата загружается в стек, а в программный счетчик загружается адрес-вектор 0004h. Инструкция возврата из подпрограммы обработки прерывания Мнемоника операнды Расшифровка мнемоники Количество циклов Изменяемые регистры Примечание БАЙТОВЫЕ ОПЕРАЦИИ С РЕГИСТРАМИ ADDWF f, d Add W and F 1 C, DC, Z 1,2 ANDWF f, d AND W with F 1 Z 1,2 CLRF f Clear F 1 Z 2 CLRW Clear W 1 Z СОМF f, d Complement F 1 Z 1,2 DECF f, d Decrement F 1 Z 1,2 DECFSZ f, d Decrement F, Skip if Zero 1(2) 1,2,3 INCF f, d Increment F 1 Z 1,2 INCFSZ f, d Increment F, Skip if Zero 1(2) 1,2,3 IORWF f, d Inclusive OR W with F 1 Z 1,2 MOVF f, d Move F 1 Z 1,2 MOVWF f Move W to F 1 NOP No Operation 1 RLF f,d Rotate Left F through carry 1 C 1,2 RRF f,d Rotate Right through carry 1 C 1,2 SUBWF f, d Subtract W from F 1 C, DC, Z 1,2 SWAPF f, d Swap nibbles in F 1 1,2 XORWF f, d Exclusive OR W with F 1 Z 1,2 Мнемоника операнды Расшифровка мнемоники Количество циклов Изменяемые регистры Примечание БИТОВЫЕ ОПЕРАЦИИ С РЕГИСТРАМИ BCF f, b Bit Clear F 1 1,2 BSF f, b Bit Set F 1 1,2 BTFSC f, b Bit Test F, Skip if Clear 1(2) 3 BTFSS f, b Bit Test F, Skip if Set 1(2) 3 ОПЕРАЦИИ С ЛИТЕРАЛАМИ И ПЕРЕХОДЫ ADDLW k Add Literal and W 1 C, DC, Z ANDLW k AND Literal with W 1 Z CALL k Call subroutine 2 CLRWDT Clear Watchdog Timer 1 TO, PD GOTO k Go To address 2 IORLW k Inclusive OR Literal with W 1 Z MOVLW k Move Literal to W 1 RETFIE Return From Interrupt 2 RETLW k Return with Literal in W 2 RETURN Return from subroutine 2 SLEEP Sleep into standby mode 1 TO, PD SUBLW k Subtract W from Literal 1 C, DC, Z XORLW k Exclusive OR Literal with W 1 Z Примечания: 1) Когда происходит чтение-модификация-запись портов ввода-вывода, то всегда считывается реальные значения напряжений на выводах, независимо от того, как настроены линии порта и что записано в триггер- защелку. Операция производится над считанным реальным значением и результат записывается в защелку. 2) Когда эта инструкция выполняется над регистром TMR0 и d= 1, предделитель сбрасывается, если подключен к модулю Timer0. 3) Если программный счетчик модифицируется или проверка на условие возвращает истинный результат, инструкция требует два машинных цикла. Второй цикл исполняется процессором как NOP. 3.6.2 Микросхема КР142ЕН5А Микросхема КР142ЕН5А трехвыводный стабилизатор с фиксированным выходным напряжением 5 вольт могут найти применение в широком спектре радиоэлектронных устройств в качестве источниках питания логических систем, измерительной технике, устройств высококачественного воспроизведения и других радиоэлектронных устройств. Внешние компоненты могут быть использованны для ускарения переходных процессов. Входной конденсатор необходим только в том случае, если регулятор находиться на растоянии более 5 см от фильтрующего конденсатора источника питания.Основные характеристики: -Допустимый выходной ток 1А -Не требуются внешние компоненты -Внутренняя термозащита -Защита выходного транзистора -Внутреннее ограничение тока КЗ Таблица 3.7 — Электрические характеристики КР142ЕН5А Рис. 3.9 — Схема включения КР142ЕН5А Если значение счетчика секунд еще не равно трем, прерывание завершается без обнуления 16-разрядного счетчика. В противном случае в 16-разрядном счетчике накапливается количество прерываний с входа RB0 за три секунды. Это значение перекодируется в двоично-десятичное число и переписывается в регистры индикации. Двоичный счетчик обнуляется и цикл повторяется. В данном случае индикация обновляется каждые три секунды. Заключение В ходе выполнения курсовой работы был разработан «Цифровой автомобильный тахометр». В пояснительной записки представлены схемы: электрическая структурная, электрическая функциональная, электрическая принципиальная с описанием. Также приведено описание всей элементной базы устройства, приведено описание работы пользователя с устройством. Применение микроконтроллера PIC16F84 позволило создать компактное, эргономичное устройство с минимальными массогабаритными и экономическими показателями. Прошивка микроконтроллера приведена в приложении к пояснительной записки. В графической части представлены чертежи схем: электрической структурной и электрической принципиальной в соответствии со стандартами ЕСКД. Список использованных источников 1. www.microchip.ru; 2. Радиолюбительские конструкции на PIC-микроконтроллерах кн.1(Заец Н.) 2003; 3. www.integral.by. Ссылки для скачивания чертежеи: http://depositfiles.com/files/otnsonrcc http://depositfiles.com/files/ry5uz2l9v http://depositfiles.com/files/gohzre6rd http://depositfiles.com/files/fusrx4ov8 http://depositfiles.com/files/e7f9n2rx2 http://depositfiles.com/files/gacx7bz15 http://depositfiles.com/files/q9fphx1br http://depositfiles.com/files/2t07phfob http://depositfiles.com/files/rfrlwdeit
Формат файла списка устройств PIC WinPic
Формат файла списка устройств PIC WinPicФормат файла PIC-устройства WinPic список
Файл DEVICES.INI
Этот файл можно изменить, чтобы WinPic поддерживал новое устройство PIC. Добавить поддержка нового устройства, которое напрямую не поддерживается WinPic,
- Создайте резервную копию файла DEVICES.INI
- Загрузите файл DEVICES.INI с помощью текстового редактора, например Блокнота.
- Добавьте новый раздел для вашего нового устройства, например [PIC16F9999].Самый легкий способ добиться этого — скопировать блок-копию другого раздела для аналогичного устройства, переименовать заголовок раздела и измените все параметры, которые отличаются в новом устройство.
-
(больше не требуется, так как DEVICES.INI теперь анализируется как текстовый файл;
расширение INI остается прежним по соображениям совместимости): Добавить новый
запись в разделе [Устройства]. Если, например, последняя запись в этом разделе
это
dev3 = PIC16F818
, затем добавьте новую строку с содержимым
dev4 = PIC16F9999. - Сохраните измененный файл DEVICES.INI
- Перезагрузите WinPic
Новое устройство должно появиться в список устройств сейчас. Если нет, то там может быть что-то не так в файле — обычно отсутствует запись в [Устройства] раздел, поэтому WinPic не знает, что в файле есть новый раздел. (Причина: слишком сложно проверить, какие «разделы» присутствуют в INI-файл. WinPic проверяет все записи «devX = NAME» в разделе [Устройства] чтобы узнать, какие устройства определены в файле).Определения устройств в DEVICES.INI всегда переопределяют определения в жестко запрограммированном «встроенном» list (этот метод был выбран для легкого исправления ошибок без перекомпиляции WinPic).
Имена параметров в DEVICES.INI должны говорить сами за себя. Параметры начинающиеся с «Cfgmask_» — это битовые маски для слова конфигурации. Если в соответствии с функцией не существует в конкретном устройстве, значение должно быть нулевым.
Шестнадцатеричные числа должны иметь суффикс «0x», чтобы отличать их от десятичных чисел.
WinPic может создать файл дампа с определениями всех встроенных устройств PIC. определения (в старых версиях WinPic все определения устройств «встроенный», поэтому мне приходилось изменять исходный код C и перекомпилировать WinPic всякий раз, когда появился новый ПОС. Надеюсь, теперь это закончилось … но если появится новый алгоритм программирования для нового устройства PIC, вам все еще нужно дождаться новый выпуск WinPic). Для создания файла дампа встроенным устройством определения, выберите «Инструменты» .. «Специальные».. «Выгрузить список встроенных устройств в файл» из главного меню WinPic.
Алгоритм программирования, используемый для конкретного устройства, указан в DEVICES.INI. нравится:
- (например в 16F628):
-
EraseAlgo = 16Fxx
CodeProgAlgo = 16Fxx
ConfigProgAlgo = CONFIG_MEM_16xxx
DataProgAlgo = DATA_EEPROM_16xxx
(другие параметры в DEVICES.INI описаны в следующем главу)
Как видите, для стирания / программирования CODE / программирования могут использоваться разные алгоритмы. КОНФИГУРИРОВАТЬ ПАМЯТЬ / запрограммировать ПАМЯТЬ ДАННЫХ.Можно найти много примеров в файле дампа встроенных определений устройств.
Благодаря тому, что Microchip старательно пишет новые «Спецификации программирования флэш-памяти» для каждого нового семейства чипов, которые они производили, следующие «названия алгоритмов» существовало на момент написания этой статьи. (А пока будет много подробнее — достаточно заглянуть в файл DEVICES.INI):
-
16Fxx
для 16F84, 16F628 и многих подобных устройств -
12Fxx
для 12F629 и 12F675 -
16F7x7
для 16F737 и др.Программы две ячеек памяти вовремя. Новинка с августа 2004 года! -
16F81x
для 16F818 и др. Программы четыре ячеек памяти вовремя. В 16F818, используемом для программирования кода, не уверен, что это применимо к данным EEPROM (старая спецификация программирования была неясна). -
16F87xдля 16F870 и других типов НЕ- «А». Программ по одной ячейке памяти за раз.Алгоритм «стереть все» тоже отличается от других устройств!
-
16F87xAдля 16F877A и других типов -A. Программ восемь ячеек памяти одновременно.
Внимание: алгоритм программирования для устройств -A совершенно другой. со своих старых «не-А» устройств! -
PIC18F
для всех членов семейства PIC18Fxxx (x). Для этих устройств размер так называемый «буфер записи» также должен быть указан, например:
CodeMemWriteLatchSize = 64
; Размер буфера записи в байтах. -
CONFIG_MEM_16xxx
алгоритмы программирования памяти конфигурации для 16F84, 16F628 и других «ранние устройства с FLASH-памятью» -
DATA_EEPROM_16xxx
данных Алгоритм программирования EEPROM для многих (но не всех) PIC со встроенным чипом память данных EEPROM.
Специальные алгоритмы ERASE (в DEVICES.INI):
-
ERASE_16F62xA
-
ERASE_16F81x
-
ERASE_16F87xA
-
ERASE_16F87x
-
ERASE_12F6xx
-
PIC18F (можно использовать как параметр для ERASE_ALGO) -
PIC18F_OLD(добавлен чтобы избежать проблем со «старыми» и «новыми» спецификациями программирования)
В один прекрасный день Microchip изменил ‘шаблон стирания чипа’ в своей «Flash-памяти». Спецификация программирования памяти »для некоторых PIC18Fxxxx из 0x0F0F 0x8787 на 0x3F3F 0x8F8F (последний был найден в документе DS39622J на странице 14).Некоторые новые чипы отказывались стирать с помощью старого алгоритма. Вопрос теперь будут СТАРЫЕ чипы, которые * действительно * работали с исходным кодом (на основе Документ Microchip DS39622B) все еще работает с алгоритмом NEWER? Для по этой причине теперь можно установить значение «EraseAlgo» в DEVICES.INI WinPic. наPIC18FилиPIC18F_OLD.Для Например, PIC18F2550 можно было успешно стереть с помощью обоих командных шаблонов. (один из DS39622B * и * из DS39622J), в то время как PIC18F8490 мог только быть стерто с использованием шаблона, указанного в DS39622J.Смотрите также: WinPic FAQ.
Если вы добавили новое устройство в список и успешно его протестировали, пожалуйста пришлите мне новый раздел в вашем DEVICES.INI. Я включу это в один будущих версий WinPic, так что другие тоже могут его использовать! Мой электронный адрес «подлежит изменению», вы убедитесь в этом, внимательно посмотрев на мои веб-сайт (спам-боты не допускаются; посетители-люди посмотрите на написанный от руки адрес электронной почты на странице «Кто я?»).
Определения устройств в DEVICES.INI переопределят встроенную таблицу определений.Итак, если вы обнаружите ошибку в определении устройства, добавьте ее в DEVICES.INI. чтобы позволить WinPic игнорировать свою внутреннюю таблицу устройств PIC. Появится сообщение в строке состояния и в списке сообщений WinPic.
Параметры в DEVICES.INI
Для каждого устройства PIC в файле определения много разных параметров. можно определить. Обычно большинство этих параметров имеют те же значения, что и для других PIC того же семейства, но некоторые нет. При добавлении поддержки для новое устройство, попробуйте найти похожее устройство, скопируйте и вставьте определения в новый сегмент INI-файла.Итак, вам нужно отредактировать только несколько значений — но будьте осторожны, чтобы найти отличия!
Следующие значения параметров (после символа ‘=’) принимаются как пример из PIC12F675.
- DeviceName = PIC12F675
- Эта строка будет отображаться в списке устройств WinPic.
- CodeMemType = 1
- Определяет тип памяти кода (псевдоним «программа»). «1» означает флэш-память.
- CodeMemSize = 1024
- Размер памяти кода в СЛОВАХ.Помните, что PIC- «слово» обычно не 16, но шириной 14 бит.
- DataEEPROMSize = 128
- Размер (данных) памяти EEPROM в БАЙТАХ.
- InternalRAMSize = 64
- Размер внутренней оперативной памяти. Отображается на вкладке устройства WinPic для пользователя информация, но не очень важная для программирования.
- AddrConfigMem = 0x2000
- Адрес первого места в «конфигурационной» памяти PIC.Я так и не нашел ничего отличного от 0x2000, но кто знает …
- AddrConfigWord = 0x2007
- Адрес (первого!) «Конфигурационного слова» PIC. Обычно это содержит конфигурация генератора и т.д. и т.п. Значение битов в конфиге Слово определяется в различных параметрах Cfgmask_xxxx.
- AddrDataMem = 0x2100
- Начальный адрес данных EEPROM. Это не настоящий адрес внутри PIC, но соглашение о том, как данные EEPROM встраиваются в файл HEX, так что это очень вряд ли изменится в будущих устройствах (но кто знает..)
- AddrOscCalib = 0x03FF
- Адрес слова калибровки генератора. Существует только для нескольких новых устройств. Значение 0xFFFFFFFF (т.е. «-1») означает, что «в коде нет калибровочного слова osc. памяти для этого устройства ».
- ConfigMemUsedLocs0 0_1 F = 0x00CF
-
Новинка с 2004-08 гг. Определяет, какая из ячеек памяти конфигурации
действительно существуют для этого устройства. Для каждого из первых 32 местоположений в конфигурации
память (адреса 0x2000..0x201F), в этом параметре есть бит (bit
0 для адреса 0x2000, бит 1 для адреса 0x2001 и т. Д.). НУЛЕВОЙ бит означает «это
местоположение не существует. Определение
ConfigMemUsedLocs00_1F = 0x00CFзначит, только адреса 0x2000 … 0x2003 (= ID местоположения), 0x2006 (ID процессора) и 0x2007 (конфигурация word) существуют, все остальные местоположения «неиспользуемые» или «зарезервированные» (сленг Microchip). Некоторые новые устройства, такие как 16F737, имеют больше ячеек в памяти конфигурации, например, второе слово конфигурации или «слово калибровки» и т. д. - ConfigMemUsedLocs2 0_3 F = 0x0000
- Новинка с 2004-08 гг. Определяет, какая из «верхних» ячеек памяти конфигурации (диапазон адресов 0x2020..0x203F) действительно существует. В августе 2004 г. такого устройства не было. был известен автору, но мало ли — спецификации программирования всегда укажите область памяти конфигурации 0x2000 … 0x203F, поэтому может быть чем-то здесь в будущем.
- DeviceIdAddr = 0x2006
- Адрес расположения идентификатора устройства.Обратите внимание, что некоторые ранние микросхемы PIC не есть ID местоположения!
- DeviceIdMask = 0x3FE0
- Маска для идентификатора процессора внутри местоположения идентификатора устройства. Нулевые биты замаскировано, при сравнении значения, считанного из PIC, со значением из параметр DeviceIdValue. Почему это ? Некоторые PIC закодировали ревизию номер шага в некоторых битах идентификатора устройства, которые необходимо удалить при обнаружении тип чипа.
- DeviceIdValue = 0x0FC0
- Указывает тип процессора.Обратите внимание, что некоторые ранние фишки, такие как некогда популярные PIC16F84 не идентифицировал себя по идентификатору устройства! Это значение читать из ПОС; и WinPic ищет это значение в базе данных устройства как объяснено здесь.
- CanRead = 0
- «Флаг» для алгоритма программирования. «CanRead = 0» означает, что PIC не может будет считываться при программировании , поэтому его необходимо проверить после программирования. Взглянув на спецификацию программирования PIC, чтобы найти подходящую ценить.Для более новых PIC с «более чем одним СЛОВОМ на цикл программирования» это похоже, невозможно проверить при программировании, поэтому CanRead должен быть равен нулю.
- EraseAlgo = 12Fxx
- Определяет, какой алгоритм должен использоваться для стирания памяти кода в этой микросхеме. Некоторые символы алгоритмов перечислены в предыдущей главе.
- CodeProgAlgo = 12Fxx
- Определяет, какой алгоритм должен использоваться для записи кода («программы») в память. в этом устройстве.Обратите внимание, что Microchip, похоже, очень занят тем, что реализует новые несовместимые алгоритмы программирования для новых устройств, которые могут настоящая боль для авторов ПО для программирования PIC!
- CodeMemWriteLatchSize = 64
- Определяет размер «буфера записи» для PIC18Fxxxx. Для большинства (?) 16F, этот параметр не является обязательным (знак вопроса, потому что он * может * измениться в будущее). См. «Спецификацию программирования флэш-памяти» устройства. которую вы хотите поддержать, чтобы найти это значение.
- ConfigProgAlgo = CONFIG_MEM_16xxx
- Определяет, какой алгоритм должен использоваться для записи памяти конфигурации в это устройство. Обратите внимание, что алгоритм программирования памяти конфигурации сильно отличается из алгоритма программирования памяти кода, особенно для новых микросхем. В conig mem prog algo кажется, что Microchip реже меняет, чем алгоритм кодовой памяти.
- DataProgAlgo = DATA_EEPROM_16xxx
- Задает алгоритм программирования DATA EEPROM.К счастью, это меняет реже, чем алгоритм программирования памяти кода. До сих пор там есть только один алгоритм программирования DATA EEPROM (DATA_EEPROM_16xxx), который даже работает для семейства 12Fxxx.
- Ti_Clock_us = 5
- Минимальное время для последовательного тактового импульса. Обычно 5 микросекунд. Из-за сложность прямого доступа к порту под windows, WinPic вряд ли может понять это с «очень простыми» программистами. Но указав правильное значение из таблицы данных PIC здесь не повредит!
- Ti_Prog_us = 10000
- Требуемая продолжительность «цикла программирования» в микросекундах.Если вы не знаете точно, введите здесь 10000. Более высокое значение, чем указано в спецификации программирования PIC не повредит для PIC на основе FLASH.
- Ti_Erase_us = 10000
-
Требуемое время задержки для команды «Стереть» (в микросекундах). Как правило
где-то около 10 миллисекунд.
- CmdLoadConfig = 0
- Последовательная команда для «Загрузить конфигурацию». Маловероятно, что битовая комбинация ибо эта команда когда-нибудь изменится, но… (как вы уже догадались: «кто знает»).
- CmdLoadProg = 2
- Последовательная команда для «Загрузить программу». Посмотрите спецификацию программирования PIC. Вряд ли что-то изменится.
- CmdReadProg = 4
- Последовательная команда для «Прочитать программу». См. Комментарии выше.
- CmdIncrAddr = 6
- Последовательная команда для «Приращения адреса».
- CmdBeginProg = 8
- Последовательная команда для «Начать программирование».Остерегайтесь, есть разные вкусы этой команды. Загляните в спецификацию программирования!
- CmdEndProg = 14
- Последовательная команда для «Завершить программирование».
- CmdLoadData = 3
- Последовательная команда для «Загрузить данные в память EEPROM».
- CmdReadData = 5
- Последовательная команда для «Чтения данных из памяти EEPROM»
- CmdEraseProg = 9
- Последовательная команда для «Стереть» или «Начать цикл стирания».Некоторые алгоритмы программирования игнорируйте этот параметр, потому что они используют совершенно другой метод стирания, который необходимо учитывать состояние битов защиты и т. д. и т. д.
- CmdEraseData = 11
- Последовательная команда для «Стереть данные EEPROM».
- CmdEraseChip = -1
- Последовательная команда для «Стереть чип» (которая для некоторых устройств работает, только если Чип ЗАЩИЩЕН !!!). Значение «-1» означает, что команды стирания чипа нет. для этого ПОС «.
- CmdBeginProgNoErase = -1
-
Последовательная команда для «Начать программирование без стирания». Не спрашивайте меня, почему они
представил это. Используется только несколькими алгоритмами программирования памяти кода.
- Cfgmask_unused = 0x0E00
- Битовая комбинация для слова конфигурации, которая содержит все «неиспользуемые» биты. (биты, которые не имеют функции и не должны учитываться при проверке фотка).
- Cfgmask_unknown = 0x0000
- Битовая комбинация для слова конфигурации, которая содержит все биты, которые не покрываются ни одной из следующих масок, но должны быть программируемыми, и должны быть учтены во время проверки.Причина этой маски: Это тоже случилось часто тот Microchip придумывал новые устройства, у которых были «совершенно новые» функции в слове конфигурации (см. длинный список ниже). Если это произойдет опять же, в будущем у вас все еще есть возможность отредактировать эти биты в конфигурации слово в шестнадцатеричной форме на вкладке WinPic «устройство / конфигурация».
- Cfgmask_cpbits = 0x0080
- Битовая маска для битов защиты кода. Может быть более одного бита CP, иногда для разных областей в памяти кода, но поскольку WinPic никогда не был предназначены для массового производства, я не хочу поддерживать все эти разные виды защиты кода.При установке галочки «защита кода» на на вкладке устройство / конфигурация, все эти биты CP активированы, если защита кода выключен, все биты CP установлены в единицу, потому что они кажутся «малоактивными», по крайней мере, для всех устройств, которые я знаю. Это Microchip решает изменить это плохой день, как они сделали с битом «PWRTE». В этом случае вы можете найти «маска инверсии для битов защиты кода» в будущей версии WinPic … или вы найдете пометку «извините, я не поддерживаю эту чушь»).
- Cfgmask_cpd = 0x0100
- Битовая маска для бита защиты данных (насколько мне известно, такая немного, если есть, но может быть и больше …. кто знает 😉
- Cfgmask_pwrte = 0x0010
- Битовая маска для бита PWRTE (включение таймера включения). Этот бит имеет другое имена, в зависимости от того, в какую таблицу вы смотрите …
- Cfgmask_inv_pwrte = 0x0010
-
Битовая маска, чтобы ИНВЕРТИРОВАТЬ бит «pwrte».Могу только догадываться, почему Microchip изменился
полярность этого бита … теперь вам нужно посмотреть в таблицу PIC
чтобы узнать, инвертирован этот бит или нет. Насколько я помню, они изменились
полярность при замене старого доброго 16C84 на 16F84 но я не
действительно уверен. Если бит PWRTE инвертирован («низкий уровень активности»), этот параметр
должен иметь то же значение, что и
Cfgmask_pwrte. - Cfgmask_wdte = 0x0008
- Битовая маска для бита включения сторожевого таймера в слове конфигурации.
- Cfgmask_oscillator = 0x0007
-
Битовая маска для выбора осциллятора. Возможные значения этих битов:
определяется следующими параметрами. У некоторых PIC четыре, у некоторых восемь
возможные комбинации:
Cfgmask_osc_rc = 0x0007
Cfgmask_osc_hs = 0x0002
Cfgmask_osc_xt = 0x0001
Cfgmask_osc_lp = 0x0000
Cfgmask_osc_extclk = 0x0003
Cfgmask_osc_intrc_noclkout = 0x0004
Cfgmask_osc_intrc_clkout = 0x0005
Cfgmask_osc_extrc_noclkout = 0x0006 - Cfgmask_lvp = 0x0000
- Бит конфигурации для «программирования низкого напряжения».Значение 0x0000 означает что для этого устройства нет возможности программирования низкого напряжения.
- Cfgmask_boden = 0x0040
- Битовая маска для «обнаружения потемнения».
- Cfgmask_mclre = 0x0020
- Битовая маска для «MCLR enable». Некоторые (более новые) PIC позволяют использовать вывод MCLR («сброс input «), который будет использоваться как контакт» I / O «(часто только входной контакт, см. таблицу).
- Cfgmask_ddebug = 0x0000
- Битовая маска для функции «отладки» на некоторых устройствах.См. Таблицу. Никогда не использовался, никогда не проверял.
- Cfgmask_wrcode = 0x0000
- Битовая маска для включения функции «запись в память кода». Да, некоторые PIC позволяют программирование памяти кода во время выполнения, которая может быть использована для записи кастомный «загрузчик» через стандартный последовательный интерфейс. Практически не используется насколько я знаю, по крайней мере для ПОС.
- Cfgmask_bandgap = 0x3000
- Битовая маска для битов калибровки запрещенной зоны.Значение 0x0000 означает «там в этом устройстве нет битов калибровки запрещенной зоны «.
- Cfgmask2_used_bits = 0x0000
-
Если в PIC есть второе слово конфигурации, все существующие биты должны
быть установленным в этом значении. Если второе слово вообще существует, на самом деле только несколько бит
существуют в нем. Поскольку это так редко используется, нет никакого «декодера» для
второе слово конфигурации в WinPic. Вы можете ввести биты только для 2-й конфигурации
слово в шестнадцатеричной форме.WinPic нужна эта битовая маска только для проверки второй
config правильно, потому что нереализованные биты могут читать «ноль» или «один»
— поэтому их нельзя игнорировать во время проверки. Cfgmask2_used_bits = 0x0000
означает «нет второго конфигурационного слова».
Обратите внимание: если есть второе слово конфигурации, бит 8 в параметреConfigMemUsedLocs00_1Fдолжен быть установленным — иначе WinPic может считать это местоположение «неиспользуемым».
вернуться к индексу
последнее изменение (формат даты ISO, ГГГГ-ММ-ДД):
2005-12-06: Задокументирован параметр CodeMemWriteLatchSize, когда мы столкнулись с
проблема с PIC18F4620.
—… …— …-.-
Как загружать фотографии в ICloud и синхронизировать с любого устройства
Идет загрузка.iCloud делает больше, чем просто резервное копирование вашего iPhone и iPad.iCloud может синхронизировать ваши фотографии на всех ваших устройствах, например на iPhone, iPad, Mac и ПК. Вы можете настроить свои устройства на автоматическое размещение копий всех фотографий в iCloud, а также можете вручную загружать фотографии со своего Mac или ПК с Windows в iCloud.
Как включить Фото iCloud на iPhone или iPad
Чтобы начать работу с Фото iCloud, убедитесь, что он включен и настроен для загрузки ваших мобильных фотографий в облако.
1. На устройстве iPhone или iPad запустите приложение «Настройки».
2. Прокрутите вниз и коснитесь «Фото».
3. Если он еще не включен, включите Фото iCloud, смахнув кнопку вправо, чтобы она стала зеленой.
При включении ваши мобильные фотографии загружаются в iCloud и синхронизируются с фотографиями на других мобильных устройствах Apple.Дэйв Джонсон / Business InsiderПовторите эти действия для каждого мобильного устройства Apple, которое вы хотите синхронизировать с iCloud. Все фотографии с вашего iPhone и iPad теперь должны автоматически загружаться в iCloud. Примечание: если вы хотите удалить определенные фотографии со своего iPhone, но не из iCloud, следуйте нашему руководству с практическими рекомендациями.
Как включить Фото iCloud на Mac
1. Запустите приложение «Фото».
2. В строке меню в верхнем левом углу экрана нажмите «Фото», а затем нажмите «Настройки…»
3. Убедитесь, что в верхней части окна выбрана вкладка «iCloud». а затем включите «Фото iCloud», установив флажок.
Включите «Фото iCloud» в настройках приложения «Фото».Дэйв Джонсон / Business InsiderКак включить Фото iCloud на ПК
Прежде чем вы сможете загружать фотографии в iCloud с компьютера Windows, вам необходимо включить iCloud с помощью настольного приложения iCloud.
1. Загрузите и установите iCloud для Windows 10. Если вы используете старую версию Windows, получите приложение iCloud от Apple.com.
2. Перезагрузите компьютер. После перезагрузки iCloud может запуститься автоматически. Если этого не произошло, нажмите кнопку «Пуск» и запустите iCloud из меню «Пуск».
3. Войдите, используя свой Apple ID.
4. Выберите функции для резервного копирования и синхронизации на ваших устройствах. Обязательно выберите «Фото», а затем нажмите «Применить».
Отметьте «Фото» и нажмите «Применить».» Дэйв Джонсон / Business InsiderПосле установки настольного приложения iCloud вы можете использовать его, чтобы выбрать способ резервного копирования и синхронизации фотографий, если вы хотите поделиться закладками настольного браузера с Safari на устройстве iOS и т. Д.
Как загрузить фотографии с компьютера в iCloud
После того, как вы все включили, загружать фотографии в iCloud очень просто:
- Если вы используете Windows, откройте папку проводника и нажмите «Фото iCloud» в панель слева.Перетащите фотографии в папку «Фото iCloud». Они будут немедленно загружены в iCloud и скопированы на другие синхронизированные устройства.
- Если вы используете Mac, запустите приложение «Фото» и перетащите фотографии в приложение. Они будут немедленно загружены в iCloud и скопированы на другие синхронизированные устройства. Этот метод позволит вам загружать определенные фотографии в iCloud, а не всю вашу библиотеку iCloud, что можно сделать, открыв настройки фотографий, как описано выше.
Дэйв Джонсон
Писатель-фрилансер
автоматизированных зданий.com Статья — Заявление о соответствии реализации протокола (PIC)
AutomatedBuildings.com Статья — Заявление о соответствии реализации протокола (PIC)|
Заявление о соответствии реализации протокола (PIC) |
Нироша Мунасингхе MBusIT BSc BE (Hons) (Melb) Менеджер по развитию продукции, Открыть General Содействующий редактор |
Как открытый протоколы развиваются в индустрии BAS, контролируют требования к новым и модернизированные здания определяют подробные характеристики протокола, который будет реализованы в устройствах управления.Несколько лет назад в спецификации управления только заявлено, что протокол связи должен быть BACnet или родным BACnet. Не было конкретных подробностей об особенностях и услугах, которые устройство должно поддерживать. Однако благодаря образованию и развитию открытых стандарты, требования теперь требуют конкретных функций от элемента управления устройств. Технические характеристики описание подробных функций реализации для сигнализации, регистрации данных, планирования и обмен данными. В большинстве случаев это также указание заявления о соответствии для каждого подаваемого устройства управления для тендерного процесса.Например: «Обеспечьте все необходимое, совместимое с BACnet. аппаратное и программное обеспечение, соответствующее функциональным характеристикам системы. Предоставлять заявление о соответствии реализации протокола (PIC) для каждого контроллера в система, включая унитарные контроллеры ». Такое заявление — шаг вперед для индустрии. Пытается проверить совместимость системы уже существующих и / или новых устройств с требования клиента. Однако имеют ли лица, принимающие решения, право понимание интерпретации заявления PIC от разных поставщиков? Не много и в большинстве случаев совсем нет.Лица, принимающие решения, понимают, что это документ это описывает соответствие протоколу, но когда дело доходит до анализа деталей внутри документа есть пробел в знаниях. Я видел в некоторых ситуациях, лица, принимающие решения, подсчитывают количество функций, поддерживаемых поставщиком A, по сравнению с Поставщик B и предлагает тендер продавцу, у которого больше количество. Тогда слово Распространяется в отрасли, что поставщик A имеет больше функций, чем поставщик B, следовательно, поставщик A — лучший продукт. Это просто неправильно.В этой статье исследуется, что такое заявление PIC. в BACnet и описывает основные характеристики документа.
Протокол Заявление о соответствии реализации (PIC) — это письменный документ, созданный производитель устройства BACnet, чтобы описать функции BACnet, реализованные в устройство. Основная цель документа — проверить, работает ли устройство. совместим с указанной системой и имеет синергию с клиентским требования. Следовательно, каждый BACnet устройство должно иметь оператор PIC.
Ниже приводится
пример инструкции PIC для устройства BACnet.
Из документ, большинство игроков в индустрии BAS могут сделать вывод, что устройство BACnet может выполнять физический ввод / вывод, тревогу, планирование, регистрацию данных и данные совместное использование в среде связи RS485. Это правильно, но многие предполагают, что все функции, относящиеся к характеристикам, могут быть реализованы устройством. Этот предположение приводит к многим проблемам, таким как переоценка характеристик устройств и проблемы системной интеграции, вызывающие увеличение затрат на всем жизненный цикл здания.Чтобы избежать этих вопросы, мы должны иметь глубокое понимание того, что включено в заявление ПОС. Давайте подробно проанализируем каждый раздел заявления PIC:
Профиль: Обрисовывает конкретный профиль BACnet устройство. Стандарт BACnet определяет различные профили, которые должны поддерживать определенные особенности устройства следует классифицировать как профиль. Стандарт BACnet определяет следующие профили:
BIBB Поддерживаются: BACnet Строительные блоки взаимодействия (BIBB) представляют собой набор сервисов BACnet.В нем указаны точные возможности устройства. в структурированном формате. Он определяет обмен данными, тревогу, планирование, данные ведение журнала и сетевое управление устройством. Он также определяет, иметь возможность инициировать и / или выполнять услугу. Например, в пример инструкции PIC, устройство может инициировать чтение (ReadProperty A), а также может выполнить запрос чтения, направленный на устройство (ReadProperty B). См. Стандарт BACnet 135-2008 для подробное объяснение об услугах.Очень важно, чтобы лица, принимающие решения понять значение услуг, чтобы выбрать правильный продукт для требования. Например ReadPropertyMultiple-B подразумевает, что устройство имеет возможность отправлять ответ на запрос чтения нескольких свойств в одном кадре, следовательно минимизация пропускной способности сети. Поэтому, если устройство не поддерживает ReadPropertyMultiple-B, лицо, принимающее решение, должно понимать, что все чтение для устройства должно выполняться по одному свойству на кадр с помощью ReadProperty сервис, увеличивающий пропускную способность в сети.Каждая из этих услуг имеет влияние на систему. Почему, как Следовательно, для большей производительности, мультивендорная интеграция и будущее расширение сети, услуги должны быть больше понимается отраслью.
Поддерживаемые объекты: A Объект BACnet — это группа свойств, которая описывает физический или логический точка в системе BAS. Объекты BACnet позволяют логически структурировать система без требования проприетарного программирования. Например, тип объекта аналогового входа описывает физический вход, такой как датчик температуры.Объект расписания определяет логическая точка графика завода. Каждый объект содержит обязательные свойства который должен быть реализован поставщиком, если устройство поддерживает объект и необязательные свойства. Не думайте, что если устройство реализует конкретную объект, который реализует все свои свойства. Например, если есть требование, чтобы состояние двоичного выхода изменялось по прошествии определенного времени, двоичный Выходной объект, который поддерживает необязательные свойства Minimum_Off_Time и Minimum_On_Time не требуется.Точно так же возможность иметь особое исключение планирование событий (например, праздников) является необязательным свойством для расписания. объект.
Канал передачи данных и параметры сети: Обрисовывает в общих чертах связь архитектура, с которой работает устройство, и возможность подключения к сети, доступная для просматривать устройство в локальной или глобальной сети.
Как это может быть как видно из этого простого примера, выбор правильного устройства для соответствия контролю требования — непростая задача. Многие берут устройство, поддерживающее BACnet, для предоставлено и предполагаю, что он может выполнять множество задач.Важно, чтобы решение производители хорошо разбираются в тонкостях BACnet и вкладывают время в начальный этап проекта по выбору продуктов, подходящих для требования. Продукт с наибольшим характеристики не означает, что это лучший продукт.
нижний колонтитул
[Щелкните баннер, чтобы узнать больше]
[Домашняя страница] [The Automator] [О нас] [Подписаться ] [Связаться Нас]
Перенос фото и видео с iPhone, iPad или iPod touch
Узнайте, как перенести фото и видео с iPhone, iPad или iPod touch на Mac или ПК.Вы также можете сделать свои фотографии доступными на всех своих устройствах с помощью Фото iCloud.
Использование фотографий iCloud
iCloud Photos обеспечивает безопасность, актуальность и автоматическую доступность ваших фотографий и видео на всех ваших устройствах Apple в iCloud.com и даже ваш компьютер. Когда вы используете iCloud Photos, вам не нужно импортировать фотографии с одного устройства iCloud на другое. iCloud Photos всегда загружает и сохраняет исходные фотографии в полном разрешении. Вы можете хранить оригиналы с полным разрешением на каждом из ваших устройств или вместо этого экономить место с помощью оптимизированных для устройств версий. В любом случае вы можете загрузить свои оригиналы, когда они вам понадобятся. Любые организационные изменения или правки, которые вы вносите, всегда актуальны на всех ваших устройствах Apple. Узнайте, как настроить и использовать Фото iCloud.
Фотографии и видео, которые вы храните в iCloud Photos, используют ваше хранилище iCloud. Прежде чем включить Фото iCloud, убедитесь, что у вас достаточно места в iCloud для хранения всей вашей коллекции. Вы можете узнать, сколько места вам нужно, а затем при необходимости обновить тарифный план.
Импорт на Mac
Вы можете использовать приложение «Фото» для импорта фотографий с iPhone, iPad или iPod touch на Mac.
- Подключите iPhone, iPad или iPod touch к Mac с помощью кабеля USB.
- Откройте приложение «Фото» на своем компьютере.
- В приложении «Фотографии» отображается экран «Импорт» со всеми фотографиями и видео, хранящимися на подключенном устройстве. Если экран «Импорт» не появляется автоматически, щелкните имя устройства на боковой панели «Фотографии».
- Если потребуется, разблокируйте устройство iOS или iPadOS с помощью пароля. Если вы видите на своем устройстве iOS или iPadOS запрос о доверии этому компьютеру, нажмите «Доверять», чтобы продолжить.
- Выберите, куда вы хотите импортировать фотографии. Рядом с «Импортировать в» вы можете выбрать существующий альбом или создать новый.
- Выберите фотографии, которые нужно импортировать, и нажмите «Импортировать выбранные» или «Импортировать все новые фотографии».
- Дождитесь завершения процесса, затем отключите устройство от Mac.
Узнайте, что делать, если не удается импортировать фотографии с iPhone, iPad или iPod touch на компьютер.
Импорт на ПК с Windows
Вы можете импортировать фотографии на свой компьютер, подключив устройство к компьютеру и используя приложение Windows Photos:
- Убедитесь, что на вашем компьютере установлена последняя версия iTunes.Для импорта фотографий на компьютер требуется iTunes 12.5.1 или новее.
- Подключите iPhone, iPad или iPod touch к компьютеру с помощью кабеля USB.
- Если потребуется, разблокируйте устройство iOS или iPadOS с помощью пароля.
- Если вы видите на своем устройстве iOS или iPadOS запрос о доверии этому компьютеру, нажмите «Доверять» или «Разрешить», чтобы продолжить.
Затем посетите веб-сайт Microsoft, чтобы узнать, как импортировать фотографии в приложение Windows Photos в Windows 10.
Если у вас включены фотографии iCloud, вам необходимо загрузить исходные версии фотографий в полном разрешении на iPhone перед импортом на компьютер.Выясни как.
Когда вы импортируете видео с устройства iOS или iPadOS на компьютер, некоторые из них могут неправильно повернуться в приложении Windows Photos. Вы можете добавить эти видео в iTunes, чтобы воспроизводить их в правильной ориентации.
Если у вас возникли проблемы с импортом фотографий с устройства iOS или iPadOS в Windows 10, попробуйте выполнить следующие действия:
- На устройстве iOS или iPadOS откройте приложение «Настройки». Коснитесь «Камера», затем коснитесь «Форматы».
- Tap Most Compatible. С этого момента ваша камера будет создавать фото и видео в форматах JPEG и H.264 формата.
Узнайте, что делать, если не удается импортировать фотографии с iPhone, iPad или iPod touch на компьютер.
Узнать больше
Есть другие способы переноса фото и видео на ваш компьютер:
Информация о продуктах, произведенных не Apple, или о независимых веб-сайтах, не контролируемых и не проверенных Apple, предоставляется без рекомендаций или одобрения.Apple не несет ответственности за выбор, работу или использование сторонних веб-сайтов или продуктов. Apple не делает никаких заявлений относительно точности или надежности сторонних веб-сайтов. Свяжитесь с продавцом для получения дополнительной информации.
Дата публикации:
показать фото шасси | Руководство пользователя интерфейсов Ethernet для устройств маршрутизации
user @ host> показать шасси pic fpc-slot 0 pic-slot 0
Информация о слоте 0 FPC, слоте PIC 0:
Тип 288X10GE / 72X40GE / 24X100GE
Состояние Онлайн
ПОС версии 1.18
Время работы 9 дней, 5 часов, 10 минут, 56 секунд
Информация о порте PIC:
Производитель волокна Xcvr Wave- Xcvr
Порт Тип кабеля Тип Xcvr Номер детали поставщика Длина Прошивка
13 100GBASE LR4 SM JUNIPER-SOURCE SPQCELRCDFBJ2 1302 нм 0,0
25 100GBASE LR4 SM JUNIPER-SOURCE SPQCELRCDFAJ2 1302 нм 0,0
36 40GBASE LR4 SM FINISAR CORP. FTL4C1QE1C-J1 1301 нм 0.0
37 40GBASE LR4 SM FINISAR CORP. FTL4C1QE1C-J1 1301 нм 0,0
54 40GBASE SR4 MM AVAGO AFBR-79EQDZ-JU1 850 нм 0,0
Информация о скорости порта:
Порт PFE Возможные скорости портов
0 4x10GE, 40GE
1 4x10GE, 40GE, 100GE
2 4x10GE, 40GE
3 4x10GE, 40GE
4 4x10GE, 40GE
5 4x10GE, 40GE, 100GE
6 4x10GE, 40GE
7 4x10GE, 40GE, 100GE
8 4x10GE, 40GE
9 4x10GE, 40GE
10 4x10GE, 40GE
11 4x10GE, 40GE, 100GE
12 4x10GE, 40GE
13 4x10GE, 40GE, 100GE
14 4x10GE, 40GE
15 4x10GE, 40GE
16 4x10GE, 40GE
17 4x10GE, 40GE, 100GE
18 4x10GE, 40GE
19 4x10GE, 40GE, 100GE
20 4x10GE, 40GE
21 4x10GE, 40GE
22 4x10GE, 40GE
23 4x10GE, 40GE, 100GE
24 4x10GE, 40GE
25 4x10GE, 40GE, 100GE
26 4x10GE, 40GE
27 4x10GE, 40GE
28 4x10GE, 40GE
29 4x10GE, 40GE, 100GE
30 4x10GE, 40GE
31 4x10GE, 40GE, 100GE
32 4x10GE, 40GE
33 4x10GE, 40GE
34 4x10GE, 40GE
35 4x10GE, 40GE, 100GE
36 4x10GE, 40GE
37 4x10GE, 40GE, 100GE
38 4x10GE, 40GE
39 4x10GE, 40GE
40 4x10GE, 40GE
41 4x10GE, 40GE, 100GE
42 4x10GE, 40GE
43 4x10GE, 40GE, 100GE
44 4x10GE, 40GE
45 4x10GE, 40GE
46 4x10GE, 40GE
47 4x10GE, 40GE, 100GE
48 4x10GE, 40GE
49 4x10GE, 40GE, 100GE
50 4x10GE, 40GE
51 4x10GE, 40GE
52 4x10GE, 40GE
53 4x10GE, 40GE, 100GE
54 4x10GE, 40GE
55 4x10GE, 40GE, 100GE
56 4x10GE, 40GE
57 4x10GE, 40GE
58 4x10GE, 40GE
59 4x10GE, 40GE, 100GE
60 4x10GE, 40GE
61 4x10GE, 40GE, 100GE
62 4x10GE, 40GE
63 4x10GE, 40GE
64 4x10GE, 40GE
65 4x10GE, 40GE, 100GE
66 4x10GE, 40GE
67 4x10GE, 40GE, 100GE
68 4x10GE, 40GE
69 4x10GE, 40GE
70 4x10GE, 40GE
Pic Scanner Gold — Как сделать резервную копию и восстановить отсканированные изображения
Pic Scanner Gold сохраняет фотографии только на устройстве , с помощью которого вы их сканируете.Поскольку фотографии не хранятся на сервере, это гарантирует вам полную конфиденциальность и контроль. Однако это также означает, что вы должны периодически создавать резервные копии фотографий на своем компьютере, в облачном хранилище или с другого iPhone на iPad. Это просто, и вы можете сделать это за пару минут с помощью нашей функции Back Up .
Чтобы использовать функцию резервного копирования в Pic Scanner Gold, нажмите «Меню»> «Резервное копирование».Зачем выполнять резервное копирование фотографий?
Ваши отсканированные изображения и альбомы остаются только на том iPhone или iPad, с помощью которого вы их сканируете.Поэтому, если вы потеряете устройство, или оно выйдет из строя, или вы удалите Pic Scanner с устройства, вы потеряете все свои драгоценные воспоминания. Вот почему важно выполнять резервное копирование и сохранение фотографий с вашего устройства.
Когда использовать резервное копирование
Вы можете использовать спину Функция Up для следующих случаев:
- Когда вы покупаете новый iPhone или iPad и хотите перенести фотографии, альбомы и подписи из Pic Scanner Gold на старом устройстве на новое устройство
- Для переноса фотографий, альбомов и подписей с iPhone на iPad, с iPad на iPhone или к ПК.
- Чтобы сделать резервную копию ваших фотографий, альбомов и подписей на вашем компьютере или в облачном хранилище, например Dropbox, Google Фото и т. Д.
Когда не использовать Back Up
Эта функция не предназначена для передачи отсканированных изображений из Pic Scanner (наше облегченное приложение) в Pic Scanner Gold на том же устройстве. Для этого используйте функцию Migrate в Pic Scanner.
Также не используйте Back Up для экспорта фотографий в Camera Roll, Facebook, электронную почту и т. Д.Функция для этого — Экспорт . Перейдите в галерею или альбом> нажмите Выберите > выберите фотографии для экспорта> Экспорт > выберите из показанных параметров экспорта. Чтобы открыть расширенный список параметров экспорта, нажмите Показать все .
Копирование с одного устройства iOS к другому
Чтобы перенести ресурсы со старого iPhone на новый или с iPhone на iPad, сначала убедитесь, что у вас есть Pic Scanner Gold на обоих устройствах, оба устройства используют один и тот же WIFI, и Airdrop включен на обоих.
Запустите Pic Scanner на исходном устройстве> нажмите «Меню »> «Резервное копирование» . Вы увидите сообщение ниже:
Выбрать Перенести все, Выбранные фотографии или Выбранные альбомы . Нажатие Transfer All сжимает все фотографии, альбомы и подписи и отображает параметры экспорта. Выбранные фотографии или Выбранные альбомы позволяет вам выбрать, какие фотографии или альбомы для передачи.
В параметрах экспорта целевое устройство появится в разделе Airdrop.Это может занять 3-4 секунды. Выберите целевое устройство (устройство, на которое вы хотите перенести активы. Если целевое устройство просит вас принять входящие файлы, сделайте это), и все будет сохранено в Pic Scanner на целевом устройстве (этот не перезаписывает существующие фото.)
Копирование с устройства iOS на Mac
Чтобы сделать полную резервную копию всех фотографий, альбомов и подписей из Pic Scanner Gold с iPhone или iPad на Mac, сначала проверьте, поддерживает ли ваш Mac и устройство iOS Airdrop.
>
Для компьютеров Mac, поддерживающих бесплатную раздачу:Убедитесь, что устройство iOS и Mac находятся в одной сети Wi-Fi, и на обоих включен Airdrop. Затем выполните шаги 2 и 3, перечисленные выше (ниже показаны экраны и сообщения).
После отображения параметров экспорта подождите, пока Mac не появится в списке устройств Airdrop. Выберите это. Если Mac просит вас принять входящий файл, примите. Резервная копия сохраняется на Mac в виде zip-файла.
>
Для компьютеров Mac, которые не поддерживают бесплатную раздачу:У вас старый Mac, который не поддерживает Airdrop, или вы не можете использовать Airdrop по какой-либо причине? Если да, выполните шаги 2 и 3 выше. Затем в параметрах экспорта выберите «Файлы»> «Рабочий стол». Резервная копия сохраняется в виде zip-файла на Mac. Сохраните резервную копию zip-файла в iCloud, Dropbox или другом облачном сервисе и дайте ему имя, которое вы запомните, если вам потребуется восстановить из него.
Чтобы просмотреть фотографии на Mac и поделиться ими, разархивируйте резервную копию.Распакованная папка будет содержать несколько файлов и подпапок. Нажмите «Открыть Splitted_Images», и вы увидите все фотографии с экрана галереи на Pic Scanner Gold.
Копирование с устройства iOS на ПК
В Pic Scanner Gold нажмите Menu> Backup > Transfer All, Selected Photos or Selected Albums >> Transfer to: iCloud / Cloud services > Когда отображаются параметры экспорта, выберите Dropbox (или любое другое облако storage service)> будет загружена заархивированная папка, содержащая все фотографии из выбранного альбома.После завершения загрузки вы можете получить доступ к облачной службе со своего компьютера, разархивировать папку и скопировать фотографии в любое место по вашему желанию.
Как часто следует вы архивируете файлы?
Каждый раз, когда вы сканируете фотографии, создаете или редактируете альбомы или подписи, данные вашего приложения изменяются — и это триггер для создания новой резервной копии. Сохраните две или три последних резервных копии, потому что больше лучше, чем меньше! Это быстро, и как только вы разблокируете Back Up , у вас будет неограниченное использование этой функции.
Восстановление фото из резервной копии на iPhone или iPad
Если вы потеряете или повредите свой iPhone или iPad или удалите Pic Scanner Gold со своего устройства iOS, вы можете восстановить все данные приложения, используя последнюю резервную копию на вашем Mac. Вот как это сделать:
- Найдите последнюю резервную копию на вашем Mac и измените расширение ее файла с .zip на .psmf. Вы можете получить предупреждение с просьбой подтвердить изменение — принять его.
- Убедитесь, что устройство iOS и Mac находятся в одной сети Wi-Fi и Airdrop на обоих включен.Установите Pic Scanner Gold на устройство iOS.
- Отправьте файл .psmf на iPhone или iPad через бесплатную раздачу. Если устройство iOS спрашивает, принимать ли входящие файлы, примите. Pic Scanner Gold автоматически запускается на устройстве iOS, а резервная копия извлекается в приложение.
Если что-то неясно или вы где-то застряли, напишите нам через приложение.
Вы уже видели наше новое приложение SnipTag?
SnipTag для Mac — единственное в мире приложение для обрезки целых пакетов отсканированных нескольких фотографий одним щелчком мыши.Сканируйте в форматах JPG, PNG, TIFF или BMP в ЛЮБОМ разрешении! И вы можете добавлять подписи и метаданные к фотографиям с помощью голосового диктовки. Начните бесплатную трехдневную пробную версию прямо сейчас, потому что нет другого приложения, более полезного для вашей бумаги , а также для цифровых фотографий !
[Веб-сайт] [ Ссылка на магазин приложений Mac ]
Низковольтное программирование 8-битных устройств PIC®
Существует два режима программирования микроконтроллера PIC ® : режим высокого напряжения (HV) и режим низкого напряжения (LV).Режим программирования низкого напряжения (LVP) позволяет программировать микроконтроллеры PIC Flash MCU с использованием рабочего напряжения VDD устройства. Это дает много преимуществ моделям In-Circuit Serial Programming ™ (ICSP) .
Конфигурация нового устройства PIC будет установлена в режим LVP при покупке. Любой из инструментов разработки Microchip может программировать устройство с использованием метода LVP. Многие новейшие платы для разработки, такие как Curiosity Board, используют режим LVP для встроенного программатора устройства.
Когда бит LVP регистров конфигурации установлен в 1, запись низковольтного программирования ICSP разрешена. Чтобы отключить режим низковольтного ICSP, бит LVP должен быть запрограммирован на 0.
Типовая структура регистра конфигурации LVP
LVP: Бит разрешения программирования низкого напряжения
1 = Программирование низкого напряжения разрешено. Функция вывода MCLR / VPP — MCLR.
0 = HV на MCLR / VPP необходимо использовать для программирования.
Бит LVP не может быть записан (в ноль) при работе из интерфейса программирования LVP.Целью этого правила является предотвращение выхода пользователя из режима LVP во время программирования из режима LVP или случайного исключения режима LVP из состояния конфигурации. Бит LVP можно перепрограммировать на «0» только в режиме программирования высокого напряжения.
Для входа в режим программирования низкого напряжения необходимо выполнить следующие шаги:
- MCLR переведен на низкий логический уровень напряжения (VIL).
- 32-битная последовательность ключей отображается на выводе данных ICSP (ICSPDAT) во время синхронизации вывода ICSP Clock (ICSPCLK).
После того, как последовательность клавиш завершена, MCLR должен удерживаться на уровне VIL до тех пор, пока будет поддерживаться режим Program / Verify.
Любой из инструментов Microchip Programmer / Debugger управляет этой настройкой через MPLAB® X IDE .
Старые 8-битные устройства имеют вывод PGM, который должен быть установлен на логический уровень извне. Обратитесь к таблице данных вашего устройства для правильного метода LVP.
MCLR — это входной вывод, который может перезагружать устройство, когда оно включено.Вывод MCLR также может быть сконфигурирован как стандартный вывод только для цифрового ввода. Бит конфигурации MCLRE включает или отключает вывод MCLR.
Если LVP включен (LVP = 1), вывод MCLR включается автоматически и не может быть отключен.
MCLR ВКЛЮЧЕН
Когда MCLR включен и на выводе установлен низкий уровень, устройство удерживается в состоянии сброса. Вывод MCLR подключен к VDD через внутренний слабый подтягивающий резистор.
MCLR ВЫКЛЮЧЕН
Когда MCLR отключен, вывод MCLR становится выводом только для цифрового ввода и может иметь внутренний слабый подтягивающий резистор посредством программного управления.
Вывод MCLR / Digital Input Only имеет индивидуально управляемый слабый внутренний подтягивающий резистор, подключенный к VDD.
