Что такое актуатор и как он работает. Какие бывают виды актуаторов. Где применяются актуаторы в промышленности и быту. Как устроен и функционирует линейный актуатор. Какие преимущества дает использование актуаторов.
Что такое актуатор и каковы его основные функции
Актуатор представляет собой исполнительный механизм, предназначенный для преобразования управляющего сигнала в механическое перемещение. Основные функции актуатора:
- Преобразование энергии (чаще всего электрической) в механическое движение
- Передача усилия с управляющего механизма на исполнительный элемент
- Обеспечение точного позиционирования и перемещения исполнительного элемента
- Автоматизация различных процессов и операций
Актуаторы позволяют значительно упростить выполнение многих технологических и бытовых задач, требующих точного управляемого перемещения.
Основные виды актуаторов и их особенности
Существует несколько основных видов актуаторов, различающихся принципом действия и конструкцией:

Линейные актуаторы
Обеспечивают прямолинейное возвратно-поступательное движение штока. Преобразуют вращательное движение электродвигателя в линейное перемещение. Широко применяются в промышленности и быту.
Поворотные актуаторы
Обеспечивают вращательное движение выходного вала в заданном диапазоне углов. Используются для управления различными поворотными механизмами.
Пневматические актуаторы
Работают за счет энергии сжатого воздуха. Отличаются высоким быстродействием, но требуют наличия системы подачи сжатого воздуха.
Гидравлические актуаторы
Приводятся в действие гидравлической жидкостью под давлением. Способны развивать большие усилия, но имеют сложную конструкцию.
Электромагнитные актуаторы
Работают за счет электромагнитного взаимодействия. Отличаются простотой конструкции и высоким быстродействием.
Устройство и принцип работы линейного актуатора
Линейный актуатор состоит из следующих основных элементов:
- Электродвигатель
- Редуктор
- Винтовая передача
- Выдвижной шток
- Корпус
- Система управления
Принцип работы линейного актуатора:
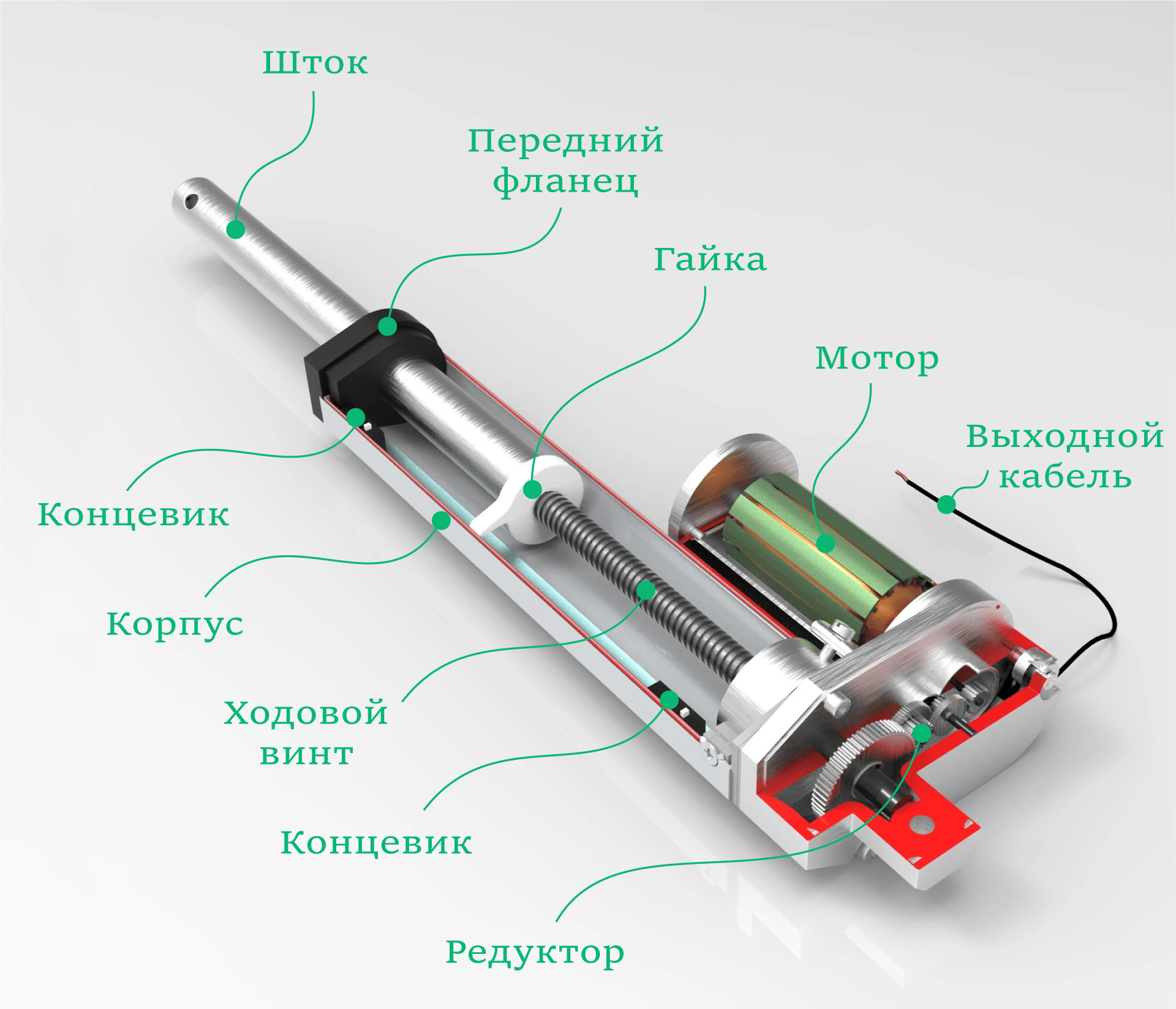
- Электродвигатель преобразует электрическую энергию во вращательное движение
- Редуктор снижает скорость вращения и повышает крутящий момент
- Винтовая передача преобразует вращательное движение в линейное перемещение штока
- Шток совершает возвратно-поступательное движение, передавая усилие на исполнительный механизм
Система управления обеспечивает точное позиционирование штока в заданных положениях.
Где применяются актуаторы в промышленности
Актуаторы нашли широкое применение в различных отраслях промышленности:
- Машиностроение — автоматизация станков и производственных линий
- Робототехника — обеспечение движений роботов и манипуляторов
- Автомобилестроение — управление различными системами автомобиля
- Авиастроение — управление механизацией крыла и другими системами самолета
- Нефтегазовая отрасль — управление запорной арматурой трубопроводов
- Энергетика — управление затворами гидроэлектростанций
- Пищевая промышленность — автоматизация производственных процессов
Актуаторы позволяют значительно повысить уровень автоматизации производства и улучшить качество выпускаемой продукции.

Использование актуаторов в бытовой технике и умном доме
В быту актуаторы также находят все более широкое применение:
- Бытовая техника — управление дверцами посудомоечных и стиральных машин
- Мебель — регулировка положения кроватей, диванов, кресел
- Системы умного дома — автоматизация штор, жалюзи, ворот
- Телевизоры — выдвижение и поворот экрана
- Автомобили — управление люком, багажником, регулировка сидений
- Медицинское оборудование — регулировка положения кроватей, каталок
Использование актуаторов в быту позволяет повысить комфорт и удобство пользования различными устройствами и предметами интерьера.
Преимущества применения актуаторов
Использование актуаторов дает ряд существенных преимуществ:
- Автоматизация различных процессов и операций
- Повышение точности позиционирования и перемещения
- Увеличение производительности оборудования
- Снижение физической нагрузки на человека
- Возможность дистанционного управления
- Повышение безопасности производственных процессов
- Экономия энергии и ресурсов
- Улучшение эргономики устройств
Благодаря этим преимуществам актуаторы находят все более широкое применение как в промышленности, так и в быту.

Основные характеристики актуаторов
При выборе актуатора следует учитывать его основные технические характеристики:
- Тип перемещения (линейное, поворотное)
- Развиваемое усилие или крутящий момент
- Длина хода или угол поворота
- Скорость перемещения
- Точность позиционирования
- Потребляемая мощность
- Напряжение питания
- Степень защиты от внешних воздействий
- Габаритные размеры и масса
Правильный выбор актуатора с учетом всех характеристик позволяет обеспечить оптимальную работу системы в целом.
Особенности эксплуатации и обслуживания актуаторов
Для обеспечения длительной и надежной работы актуаторов необходимо соблюдать следующие правила эксплуатации и обслуживания:
- Использовать актуатор строго по назначению, не превышая указанных в паспорте нагрузок
- Обеспечивать защиту от попадания влаги и пыли
- Регулярно проводить визуальный осмотр на предмет повреждений
- Проверять надежность электрических соединений
- Смазывать подвижные части согласно инструкции
- Своевременно заменять изношенные детали
- Не допускать механических ударов по корпусу актуатора
При правильной эксплуатации и своевременном обслуживании актуаторы способны прослужить длительное время без потери своих характеристик.

Актуаторы. Виды и устройство. Работа и применение. Особенности
Актуаторы представляют собой специальные устройства, главной задачей которых является перенос усилия с управляющего или регулирующего механизма на исполнительный. В большинстве случаев это электромеханический агрегат, который позволяет выполнять круговые либо линейные перемещения. Благодаря этому можно значительно облегчить выполнение технологических операций, тестирование, в том числе упростить условия быта. Эти устройства применяются и для совершения специфических задач, к примеру, для осуществления миссий и проведения исследований в космическом пространстве.
Виды
Актуаторы бывают линейными и устройствами вращения.
ЛинейныеСемейство устройств, которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической. Выполняются такие устройства из подвижного штока, который устанавливается в корпус из металла или пластмассы. Чтобы к агрегату поступала электроэнергия, предусматриваются разъемы, вилки или кабели. В зависимости от конструкции привод может потреблять 12, 24, 36 либо 220 В.
Линейные агрегаты имеют два основных исполнения:
- Горизонтальное.
- Вертикальное.
То есть конструкция агрегата такова, что шток перемещается в вертикальном либо горизонтальном направлении по отношению к валу мотора.
К преимуществам линейных агрегатов можно отнести:
- Простоту конструкции.
- Длительный срок эксплуатации.
- Неприхотливость в работе, что позволяет использовать их даже в экстремальных условиях.
Конкретные агрегаты в зависимости от модели могут дополнительно иметь защиту, которая обеспечивает стойкость к неблагоприятным условиям.
Актуаторы вращенияРаботают несколько иначе. У них имеется редуктор и электродвигатель. Особенность работы такого агрегата в том, что чем ниже передаточное число шестеренок редуктора, тем выше скорость и меньше крутящий момент.
В агрегатах вращения могут применяться различные типы редукторов:
- Цилиндрический.
- Планетарный.
- Червячный.
- Комбинированный.
Благодаря разнообразию редукторов вращающие агрегаты способны решать разнообразные задачи. Поэтому они находят широкое применение в электроэнергетике, станках, бытовых устройствах, в промышленности и других отраслях.
Существуют и специальные виды актуаторов. Подобные агрегаты предназначены для решения специфических и наиболее сложных задач. Их часто применяют в космическом, а также водном пространстве. Также они находят применение в условиях вечной мерзлоты. По конструктивным составляющим они не сильно отличаются от аналогичных агрегатов. Однако их главное отличие – качество исполнения герметичности корпуса. Благодаря пылеустойчивости и водонепроницаемости удается обеспечить бесперебойность работы агрегата даже в сложнейших условиях.
УстройствоИмеется большое количество разных методов для создания линейного перемещения в линейном актуаторе. В большей части случаев используется движок, который передает движение штоку. Шток выдвигается или втягивается, перемещаясь по направляющей. Линейные актуаторы для обеспечения линейного перемещения в большинстве случаев применяют винт, то есть так называемую винтовую передачу. Благодаря вращению винта относительно гайки или наоборот обеспечивается линейное движение штока.
Движки, применяемые в линейных агрегатах, чаще всего представляют собой стандартные коллекторные устройства, работающие на постоянном токе в 12 или 24 В. Более мощным агрегатам требуется электроток на порядок большего значения. Однако возможно применение и других типов движков.
Для изменения направления движения штока следует поменять направление вращения движка. Для примера, в коллекторном движке следует сменить полярность электропитания. С этой целью в конструкцию добавляется переключатель, благодаря нему происходит смена полярности электропитания. В результате простым нажатием кнопки можно изменить вращение движка, а значит попеременно выдвигать или втягивать шток.
РаботаИмеющиеся сегодня линейные актуаторы могут иметь разный ход штока. Это значит, что агрегаты создаются с разными длинами корпуса и винта. Кроме длины хода важнейшее значение имеют скорость и усилие, которые создаются на штоке агрегата. Чтобы обеспечить требуемую скорость и усилие штока, требуется модернизация устройства. Для этого между валом движка и винтом ставится редуктор механического действия.
Движок передает на вал скорость и усилие, которые являются неизменными. Движок же меняет отношение скорости и момента кручения, благодаря чему меняется конечная скорость перемещения штока, а также создаваемое усилие. Движение винта также представляет передачу, которая влияет на скоростное и силовое отношение. Меньший шаг винтовой передачи обеспечивает большее усилие. Однако шток при этом будет перемещаться с меньшей скоростью.
Чтобы можно было остановить шток в необходимом положении, в агрегат ставятся концевики. Их также называют выключателями. Концевики ставятся непосредственно на шток. Они начинают работать в момент, когда гайка достигает крайнего положения. С этой целью ставятся датчики в конечные положения. Когда шток доходит до этого положения, то датчик выключает электропитание. Далее шток сможет двигаться только в обратном направлении. Для этого меняется полярность электропитания либо осуществляется реверс движка.
Как пример можно рассмотреть актуатор центрального замка автомобиля. В его работе используется небольшой электродвижок, соединенный с подвижным штоком. К нему приделана тяга от замка. В момент подачи напряжения начинает работать движок, который заставляет вал вращаться в требуемом направлении, что приводит к движению штока. Вместе со штоком в движение приводится и тяга, у которой один конец находится на рычаге замка. В результате осуществляется блокирование или освобождение замка.
Так как штоку требуется короткий ход, то движок быстро заклинивается. Вследствие этого необходимо ограничивать время подачи напряжения. Для этого используется блок управления, который точно дозирует временной интервал подачи электропитания. Благодаря этому движок защищен от заклинивания и перегорания.
ПрименениеАктуаторы находят широкое применение практически повсеместно. Их можно задействовать в разнообразных устройствах, к примеру, для регулировки положения телевизионного приемника, для перемещения пандуса, в станках, компрессорах, игрушках, самолетах, подводных лодках, пароходах и космических кораблях и т.п.
В медицине данные агрегаты задействованы для медицинской мебели, чтобы регулировать положения спинки кресла, кровати и другой мебели. Их ставят на подъемники, чтобы перемещать инвалидов и больных с одного этажа на другой. При этом такие устройства преимущественно имеют минимальную шумность, а также высокие значения по качеству и надежности.
В промышленности актуаторы применяются для автоматизации технологических процессов и оборудования. В большинстве случаев это компактные агрегаты, обладающие высокими показателями мощности. Их используют на заводах и фабриках для линейного перемещения. Большое значение здесь имеют технические показатели, в первую очередь это касается нагрузок, скорости, плавности перемещения, в том числе возможности функционировать в неблагоприятных условиях.
Использование промышленных агрегатов позволяет существенно облегчить людской труд, а также снизить финансовые затраты. Благодаря ним, в конце концов, снижается стоимость производимой продукции.
Можно выделить следующие области промышленного применения:
- Электромеханические агрегаты находят применение в станкостроении, машиностроении и пищевой промышленности.
- В сверхтехнологичном производстве они используются в качестве устройств, которые перемещают солнечные батареи по отношению к солнечным лучам. Также подобные агрегаты задействуют для перемещения параболических антенн вслед за спутником.
- В промышленной вентиляции агрегаты обеспечивают перемещение выдвижных панелей вытяжки, чтобы автоматизировать регуляцию воздушных потоков.
В сельском хозяйстве приводы линейного перемещения позволяют максимально автоматизировать труд при возделывании агрокультур, заготовлении кормов, при уходе за фермерскими животными и так далее.
К примеру, это могут быть разбрызгивающие устройства для обработки почв, растений от вредителей, устройства для внесения удобрения. На больших фермерских хозяйствах линейные агрегаты позволяют регулировать воздушные потоки и автоматизировать подачу кормов для животных при кормежке. В растениеводстве линейные приводы помогают открывать теплицы, чтобы огурцы или помидоры не «сгорели» от жары.
Для быта данные актуаторы просто незаменимы. Их можно встретить во многих бытовых приборах. К примеру, это могут быть шторы, жалюзи с приводом и так далее. Все автомобили просто напичканы данными устройствами. Они используются в замках багажника, дверей, магнитол с выдвижным дисплеем и тому подобное. Это полезные устройства, которые позволяют решать многочисленные задачи.
Похожие темы:
Принцип работы актуатора турбины — проверка, регулировка и ремонт
Актуатор турбины
Автомобиль – неизменных помощник практически половины населения страны. Не удивительно, что многие стараются получить максимальную пользу с машины, с минимальными вложениями. И сегодня, чтобы улучшить тяговые характеристики авто, не нужно что-то кардинально менять. Увеличить тяговые характеристики машины можно просто установив турбонаддув.
Суть улучшения – турбонаддув позволяет принудительно увеличить объемы воздуха, подающиеся в камеру сгорания, тем самым улучшить процесс сгорания топлива без необходимости физического изменения параметров самого двигателя.
Здесь важно учесть, что больший объем сожженного топлива увеличивает давление и объем выхлопных газов. Поэтому требуется усиленное, оперативное их отведение, чтобы освободить место для новой порции воздуха. Именно на этом и базируется принцип работы актуатора турбины, который мы сегодня рассмотрим.
Как работает актуатор турбины
Для начала определимся в терминологии. Актуатор может иметь множество разговорных названий – вестгейт, вакуумный регулятор, избыточный клапан. Все это одна деталь, базовая роль которой сводится к выполнению функции сброса повышенного давления воздуха (выхлопных газов), во время работы двигателя автомобиля. Этот элемент выступает промежуточным звеном между турбокомпрессором и двигателем, оберегая их от перегрузки.
Устанавливается практически на турбине.
- Принцип работы актуатора сводится к тому, что при высоких оборотах двигателя, когда возрастает давление выхлопных газов с одной стороны и воздуха, направляемого через турбокомпрессор в двигатель с другой открывается клапан и стабилизирует ситуацию. Во время открытия клапана часть выхлопных газов попросту проходят мимо турбинного колеса, что приводит к снижению эффективности работы турбинного нагнетающего колеса и снижает давление воздуха.
Снижение давления выхлопных газов и направление их в обход турбинного колеса выполняется через калитку вестгейта, управляемую актуатором. Тем самым потребность в воздухе для горючей смеси четко соответствует моменту очищения камеры сгорания от выхлопных газов.
Иные типы актуаторов
В турбинах с изменяемой геометрией также есть актуаторы, которые бывают электрические и пневматические (вакуумные). Актуаторы в этом случае служат для поворота лопаток механизма изменяемой геометрии. Обычно в таких турбинах нет калитки вестгейта с управлением актуатором от повышенного давления.
Наиболее распространенные поломки актуаторов
- повреждение электрических элементов;
- износ зубьев шестеренок и червяка у электрического актуатора;
- выходит из строя электромотор;
- повреждение мембраны вакуумного актуатора.
В таких случаях, чтобы отремонтировать актуатор турбины, необходимо выполнить его диагностику с целью точно определить поломку. Для устранения неисправности целесообразно обратиться в специализированный сервисный центр. Устранить поломку самостоятельно будет достаточно сложно – для определения неисправности нужно специальное оборудование, которое в большинстве случаев отсутствует в домашних условиях. А если покупать отдельно – намного дешевле ремонт актуатора провести в сервисном центре.
Проверка актуатора
Изначально, в момент реализации, актуатор имеет заводские настройки и, фактически, готов к работе. Но после установки на транспортное средство целесообразно проверить актуатор и отрегулировать. Характерным сигналом выполнить такие действия будет дребезжание компрессора в момент глушения двигателя авто. Здесь не стоит паниковать, это не поломка актуатора. Просто шток клапана излишне болтается в процессе работы.
Кроме этого, часто, если правильно настроить актуатор, можно существенно увеличить производительность турбокомпрессора путем наращивания давления воздуха, подаваемого в двигатель.
Регулировка осуществляется несколькими путями
- Самый простой и распространенный способ – просто выполнить замену пружины на более мощную. То позволит увеличить и поддерживать высокое давление турбины до момента срабатывания выпускного клапана. Но это чревато превышением оборотов вала турбины.
- Следующий вариант, это выполнить подтяжку (можно затянуть, либо послабить) регулятора, влияющего на процесс открытия и последующее закрытия заслонки. При расслаблении тяга удлиняется. Если немного подтянуть – укорачивается. От длины тяги напрямую зависит плотность закрытия заслонки. Чем она меньше, тем плотнее будет примыкать заслонка. Следовательно, чтобы ее открыть нужно больше давления и времени. Тем самым турбина получает возможность обеспечить высокие обороты за короткий промежуток времени.
- Еще один вариант – установка буст-контроллера. Устройство устанавливают перед вестгейтом и обеспечивает снижение давления, при котором срабатывает мембрана актуатора. Фактически такое устройство берет на себя часть функции регулирования давления, вследствие чего клапан не получает информации о реальном давлении газов и продолжает работать в штатном режиме.
Настройка актуатора
Конечно, ремонт турбин следует выполнять в условиях профессиональных сервисных центров, имеющих все необходимое диагностическое оборудование и запасные детали в случае необходимости что-либо менять. Вместе с этим обычная настройка может быть выполнена в домашних условиях.
Для этого потребуется пассатижи и ключ на 10. Последовательность действий будет такой:
- Снять турбокомпрессор (некоторые модели машин дают возможность добраться до клапана без необходимости выполнения этой процедуры).
- Снять скобу со штока, ослабить гайку, подтянуть винт регулировки (необходимо крутить влево).
- Выполнить легкое постукивание по заслонке. Подтягивать до момента, пока не пропадет небольшое дребезжание. Учитывайте, чем туже затягиваете, тем сильнее будет возрастать давление на мембране.
- Затяните гайку, верните скобу в исходное положение.
Чтобы проверить правильность ваших действий при настройках – запустите мотор и опробуйте его на разных режимах работы. Если все действия были верными – посторонних звуков не будет, в том числе и в момент глушения двигателя.
Актуатор сцепления, замка и турбины
Актуатор — это универсальный исполнительный механизм, используемый в разных технических областях. Состоят из механического привода, направляющей и моторчика. Что касается автомобилей, актуаторы используются в системе сцепления при автоматической трансмиссии, при работе центрального замка, а также в турбокомпрессоре.
Актуатор сцепления
Детально рассмотрим, как работает:
Актуатор сцепления
Роботизированные трансмиссии на сегодняшний день устанавливают даже на бюджетные автомобили (Тойота, Пежо, Ситроен, Сузуки и прочие, чьи владельцы зачастую и сталкиваются с проблемами в их работе). В состав системы входит много деталей, одними из которых являются актуатор переключения передач и актуатор сцепления. Они позволяют переключать передачи в автоматическом режиме.
Внешний вид актуатора сцепления
Описание работы
Актуатор сцепления — электромеханическое устройство, выполняющее работу по сжатию пружины выжимного диска сцепления. Оно работает в соответствии с командами, поступающими от блока управления трансмиссией. Корпус актуатора состоит из двух половинок. Внутри установлен вал с червячной шестерней. В процессе работы на него действуют три силы — сила в червячном зацеплении, сила компенсационной пружины, а также сила, исходящая от корзины сцепления.
Актуатор сцепления в разрезе
При поступлении сигнала от блока управления происходит перемещение вала, который через рабочий механизм приводит в движение корзину сцепления. Однако, как показывает практика, именно актуатор сцепления чаще других деталей в системе автоматической трансмиссии выходит из строя, лишая автовладельца возможности использовать машину.
Причины выхода из строя актуатора
Наиболее частая причина поломки — выход из строя втулок, которые установлены на оси червячной шестерни актуатора. Они обеспечивают вращение шестерни при выжиме корзины сцепления. Чтобы уменьшить трение, производители наносят на втулки тефлоновое покрытие. Однако ресурс работы втулок достаточно мал, и составляет около 100 тысяч километров пробега. После этого вероятность выхода актуатора из строя значительно возрастает. Дело в том, что в процессе эксплуатации без тефлонового покрытия силы трения возрастают настолько, что актуатор попросту перестает функционировать.
При перемещении шестерни актуатора компенсационная пружина сжимается, оказывая большое усилие на вал и втулки. Это значение составляет 100…150 кг на каждую втулку в зависимости от модели используемого механизма. Учитывая небольшой диаметр втулки, становится понятным, почему они со временем выходят из строя.
Кроме этого, вал актуатора поворачивается на незначительный угол. Поэтому смазка не передается на контактные линии взаимодействия вала со втулкой, из-за чего шарнир работает на сухую.
Втулки актуатора сцепления
Методы восстановления работоспособности актуатора сцепления
Самым распространенным и доступными методом ремонта является замена заводских втулок, которые пришли в негодность на точеные бронзовые или латунные втулки.
Подшипники для замены
Другой вариант — покупка втулок китайского производства, подобных оригинальным. Однако так лучше не поступать, поскольку их качество далеко от идеала, и не позволяет им долго функционировать в актуаторе. Ремонт подразумевает замену выточенных втулок, а также устранения выработки на валу актуатора сцепления. Это делается с тем, чтобы добиться плавного и ровного скольжения между упомянутыми деталями.
Однако наилучшим методом ремонта актуатора является замена втулок на шариковые подшипники. Они обеспечивают необходимую твердость, плавность качения, а также имеют свою собственную смазку, которая постоянно находится в их корпусе. При замене втулок на подшипники потребляемый актуатором рабочий ток снижается более чем в 2 раза.
Ремонт актуатора сцепления
Разборка и диагностика актуатора Тойота
Актуатор центрального замка
Конструкция центрального замка автомобиля несложна. Он состоит из блока управления и исполнительных механизмов — актуаторов (их еще иногда называют активаторами). При повороте ключа зажигания или подаче электронного сигнала от пульта ДУ срабатывают контакты управления, которые через центральный блок дают сигнал всем запирающим устройствам на открытие или закрытие.
Устройство и работа актуатора замка
Актуатор замка в разрезе
Это устройство представляет собой электрический микромотор, соединенный со штоком посредством реечной передачи. К штоку, в свою очередь, монтируется тяга механического замка. При подаче сигнала на двигатель происходит движение тяги, которая закрывает или открывает механический замок двери.
В связи с особенностью конструкции шток ходит на малое расстояние. Поэтому на электромотор нельзя подавать напряжение длительное время. Современные автоматические системы делают это приблизительно в течение 2 секунд. Их вполне достаточно для срабатывания каждого из приводных двигателей.
К приводному моторчику подходит два провода. По одному из них идет ток, а на втором образуется “масса”, то есть, соединение с кузовом автомобиля. Распределением, на какой провод подавать напряжение, занимается центральный электронный блок управления. В зависимости от этого меняется направление вращения вала двигателя, и как следствие, направление движения штока. То есть, происходит открытие или запирание замка на двери.
Возможные неисправности актуатора замка
Возможными неисправностями актуаторов центрального замка могут быть:
Ремонт актуатора двери Лада Приора
- Выход из строя всех актуаторов. Первая возможная причина — действие длительного командного импульса, которое привело к перегоранию обмоток. Вторая причина — неисправность генератора, вследствие чего на актуаторы было подано повышенное напряжение. Решение — замена актуаторов, при необходимости выполнение ремонта генератора.
- Клин одного или нескольких актуаторов в одном положении при расплавлении коллекторных узлов. Решение неисправности актуатора замка — замена вышедшего из строя исполнительного механизма.
- Возникновение короткого замыкания в цепях управления актуаторами или повреждение изоляции. Решение — ревизия проводки, при необходимости замена поврежденных ее участков.
- Короткое замыкание, повреждение проводки в силовых проводах актуатора или замыкание коллекторных пластин. Решение — замена поврежденных участков проводки, ремонт изоляции или замена актуатора.
- Сгорел предохранитель. Решение — заменить его.
- Шумная работа актуатора. Возможная причина заключается в износе рабочих шестерен. Решение — замена редукторного механизма.
Зачастую устранением неисправности и ремонтом привода замка является именно замена актуатора замка.
Замена актуатора центрального замка
Замена актуатора замка
Самостоятельная замена актуатора замка не представляет особых сложностей, хотя для этого и придется снять всю дверную обшивку, с тем, чтобы добраться до крепления и проводов. Если на двери имеются дополнительные кнопки, например, электрических стеклоподъемников, то нужно отсоединить от аккумулятора минусовую клемму. В противном случае можно обойтись без этого.
В процессе работы руководствуйтесь мануалом по работе с вашим автомобилем. Ведь в каждой модели обшивка двери крепится по-своему. Как правило, до актуатора можно добраться лишь сняв обшивку. В редких случаях необходимо демонтировать дополнительные механизмы. Актуатор обычно монтируется на паре болтов или саморезов. Чтобы снять его необходимо их открутить и отсоединить фишку.
В зависимости от того, какая деталь вышла из строя, нужно произвести ее замену. Чаще всего перегорают обмотки микромоторчика. Поскольку их никто не перематывает, то будет достаточно заменить его, предварительно купив аналогичный.
Актуатор турбины
Внешний вид актуатора турбины
Актуатор турбины — устройство, защищающее турбокомпрессор от перегрузок, которые естественным образом возникают при высоких оборотах двигателя. Агрегат по сути является байпасным клапаном, через который проходят излишки выхлопных газов. Он управляет скоростью вращения турбины и мощностью наддува.
Принцип работы
Отработанные выхлопные газы из выпускного коллектора отправляются в турбину. Попадая в ее горячую часть, они активируют горячую крыльчатку и вал. Соединенная валом крыльчатка холодной части создает давление на впускном коллекторе. Это обеспечивает подачу воздуха в камеру сгорания. Однако при больших оборотах в работу вступает вакуумный или электронный актуатор, который сбрасывает излишки выхлопных газов через упомянутый байпас.
Возможные поломки
Самая распространенная поломка — выход из строя или ошибка в работе электронного блока управления турбиной (на электронных актуаторах). Для их диагностики и устранения необходимо пользоваться специальными электронными тестерами. Дело в том, что срок службы механической части турбин выше, чем электронной. Однако поломка механической части турбины может привести к поломке и электронной составляющей.
Самыми вероятными причинами выхода из строя электронного актуатора (сервопривода) является повреждение одного из трех механизмов:
Если разрушается выпускной коллектор или случается поломка в поршневой группе, то это приводит к повреждению или полному выходу из строя механизма изменяемой геометрии. А это, в свою очередь, приводит к поломке механической части турбины.
Также среди вероятных поломок актуатора турбины могут быть следующие:
- повреждение электронного блока или некоторых его составляющих;
- неисправность в работе электромотора (сервопривода) или его полный выход из строя;
- некорректная работа контактной группы электродвигателя;
- поломка зубьев шестерен привода.
Методы устранения поломок
Перед устранением возможных поломок проводится диагностика блока управления актуатора. Для этого используются специальные тестеры. Однако это оборудование дорогостоящее и, как правило, ими пользуются на СТО. С его помощью тестируют исполнительный механизм (вакуумно-электрический клапан, клапан турбины с электрическим потенциометром). Дальнейшие действия зависят от выявленной поломки.
Что касается ремонта механической части, то для ремонта бывает достаточно разобрать и почистить актуатор. При этом необходимо смазать движущиеся детали. Если поломка в электронной части, то ее устранение самостоятельно невозможно. Для этого нужно обратиться за помощью в автомастерскую. Зачастую приходится полностью менять блок управления или актуатор целиком.
Ремонт актуатора турбины Skoda Octavia
Замена актуатора турбины на Kia Sorento Киа Сорренто с двигателем D4CB
Замена актуатора турбины
Замену актуатора турбины рассмотрим на примере автомобиля KIA Sorento с двигателем D4CB. Итак, для замены нужно:
- Снять защитную крышку двигателя и верхнюю крышку воздушного фильтра.
- Разобрать корпус воздушного фильтра и произвести демонтаж самого фильтра.
- Выполнить демонтаж патрубка воздушного фильтра. Если корпус и патрубок грязные — их необходимо вымыть.
- Далее производится снятие старого актуатора. Для этого нужно отсоединить его управление и расконтрить регулировочный винт, После этого раскрутить монтажные болты, выкрутить регулировочный винт и произвести демонтаж актуатора.
- Все отверстия под болты необходимо почистить и обработать медным спреем с тем, чтобы в дальнейшем они не закисали и не возникало проблем с их закручиванием и выкручиванием.
- Далее производится монтаж нового актуатора в обратном порядке. То есть, сначала выполняется наживление регулировочного винта хода актуатора, потом наживление монтажных болтов с их затягиванием.
- После чего выполняется настройка актуатора турбины (см. ниже).
- Производится сборка корпуса и непосредственно воздушного фильтра (при необходимости его нужно заменить), подключение управления актуатора, а также монтаж патрубка воздушного фильтра, заборника, хомута заборника, установка датчика ДМРВ и сборка всей конструкции.
- Далее следует регулировка турбины (это следует производить с помощью электронных устройств) на основе информации от автопроизводителя.
Настройка актуатора турбины
После проведения процедуры по замене актуатора нужно выполнить его настройку. Также ее нужно производить при появлении следующих неисправностей:
- характерное дребезжание в области турбины при глушении двигателя;
- аналогичное дребезжание в процессе перегазовки при езде.
Электронный тестер
Чаще всего причиной этого становится свободный ход штока. Именно эта деталь во многом определяет величину давления в турбине. Из-за его работы оно может быть как пониженным, так и повышенным. Свободный ход штока говорит о именно о пониженном давлении. Под свободным ходом подразумевается люфт в несколько миллиметров. В нормальном рабочем состоянии радиального люфта быть не должно, величина осевого люфта — в пределах 1 мм.
При проведении компьютерной диагностики в случае несоответствия давления могут появиться ошибки — P2262 (не определяется давление турбонаддува), P0299 (чрезмерно низкое давление наддува)/ Также иногда появляются ошибки 11825 и P334B. Первая говорит о неисправности актуатора, вторая — о механической неисправности регулятора давления. Также часто загорается лампа EPC, а позже и Check Engine.
Увеличить давление наддува можно несколькими способами:
- Замена пружины. Более жесткая пружина увеличит давление, более мягкая снизит его.
- Затягивание или отпускание конца вестгейта. Так можно регулировать уровень открытия и закрытия заслонки. При расслаблении конца происходит удлинение тяги, при затягивании — укорачивание. При короткой тяге выполняется плотное закрытие заслонки, из-за чего нужно больше давление и времени для ее открытия.
- Установка соленоида (буст-контроллера). Он позволяет изменять реальный показатель давления. Соленоид монтируется перед актуатором с тем, чтобы снижать давление, воздействующее на вестгейт. Его функция заключается в дополнительном сбросе части воздуха, то есть, “обмане” актуатора.
Самостоятельная настройка актуатора турбины производится на страх и риск владельца автомобиля, поскольку нужно знать значение давления и методику настройки.
Если вы не уверены в правильности своих действий, то рекомендуем вам обратиться за помощью к мастерам на СТО.
Алгоритм настройки актуатора:
- Настройка проводится путем вращения регулирующей гайки. Она находится в районе байпаса. В некоторых машинах к ней можно получить доступ, лишь сняв турбокомпрессор.
- После этого выполняется снятие скобы со штока. Для дальнейшей работы вам понадобятся ключ на 10 и плоскогубцы с длинной рабочей частью.
- Отвернуть внешнюю гайку на 10.
- С помощью плоскогубцев повернуть (подтянуть) регулировочную гайку против часовой стрелки до тех пор, пока калитка полностью не закроется. Далее проверить ее на предмет отсутствия вибрации.
- После этого нужно выполнить еще 3-4 поворота гайки (каждый из них соответствует приблизительно 0,315 Бар на актуаторе).
- После выполнения настройки нужно законтрить регулятор гайкой на 10.
- Далее следует установить скобу обратно. То есть, в спокойном состоянии актуатор должен быть полностью закрыт (по максимуму).
Заключение
При выборе актуаторов описанных типов всегда отталкивайтесь от мануала к вашему автомобилю. Помните, что желательно покупать оригинальные запчасти а не их более дешевые аналоги. Что касается ремонта или настройки актуаторов поступайте аналогично. Выставляйте значения, которые прописаны производителем вашей машины. В случае возникновения затруднений обращайтесь за помощью на СТО.
Спрашивайте в комментариях. Ответим обязательно!
принцип работы, основные неисправности, диагностика и настройка
Для многих водителей автомобиль – это просто средство передвижения, тогда как для других машина является хобби, в которое они готовы вкладывать время и деньги, чтобы добиться улучшения базовых характеристик. Одним из наиболее популярных способов тюнинга двигателя автомобиля является установка турбины (турбокомпрессора). Турбина способна значительно повысить мощность мотора, если ее правильно подобрать и настроить.
В настоящее время наибольшую популярность имеют турбины высокого давления, которые отличаются от базовых вариантов турбокомпрессоров наличием клапана. Он необходим, чтобы справляться с избыточным давлением при работе двигателя на высоких оборотах.
Оглавление: 1. Как работает актуатор турбины 2. Распространенные неисправности актуатора турбины 3. Как настроить актуатор турбины
Обратите внимание: В автомобильном сленге данный клапан может носить разные названия, среди которых самые распространенные следующие: вестгейт, актуатор, вакуумный регулятор. Следует понимать, что под всеми этими терминами подразумевается одна деталь, которая занимается защитой турбины от перегрузок при работе на высоких оборотах.
В процессе эксплуатации актуатор турбины может выйти из строя, и владельцу автомобиля потребуется его замена, чтобы продолжить эксплуатировать автомобиль с турбированным мотором. Замена вестгейта подразумевает не только его установку, но и регулировку, которую крайне важно выполнить правильно. В рамках данной статьи рассмотрим, как настроить клапан турбины самостоятельно, не обращаясь к специалистам сервисных центров.
Как работает актуатор турбины
Как было отмечено выше, задачей актуатора турбины является снижение давления при работе мотора на высоких оборотах. Он монтируется до турбины в выпускной коллектор автомобиля.
Принцип работы вестгейта крайне простой. Когда в двигателе повышаются обороты, а вместе с тем возрастает давление отработавших газов, стоит задача пустить их мимо самого турбинного колеса. Соответственно, в этот момент происходит открытие актуатора, установленного до турбины, и через него выходят отработавшие газы. За счет этого в клапаны попадает больше воздуха, что необходимо для максимального разгона турбонагнетателя.
Распространенные неисправности актуатора турбины
Можно выделить три главных причины, почему ломается вестгейт:
- Выходят из строя электронные составляющие компонента системы, которые отвечают за его своевременное открытие/закрытие;
- Ломаются зубья шестерней привода, что приводит к сложностям при открытии и закрытии клапана;
- Выход из строя электромотора, который отвечает за работу створки, вследствие чего система не функционирует должным образом.
В условиях специализированного сервисного центра можно устранить все описанные выше проблемы, но важно отметить, что для начала необходимо правильно диагностировать поломку, для чего потребуются специальные тестеры. Соответственно, самостоятельный ремонт актуатора турбины часто невозможен из-за отсутствия необходимого оборудования.
Чаще всего, когда клапан турбины выходит из строя, его целесообразнее не ремонтировать, а заменить. Особенно это актуально, когда выходят из строя манжет или маслосъемные колпачки, которые не подлежат замене. В таком случае потребуется снять актуатор турбины и установить на его место новый. Делается это следующим образом:
- Первым делом потребуется достать из корпуса старую манжету;
- Далее крайне важно обезжирить поверхности, чтобы они плотно скрепились друг с другом;
- После этого, используя герметичный клей, нужно наклеить новую манжету на корпус с двумя колпачками;
- Для создания необходимого вакуума между колпачками создается зазор, вместе с тем обеспечивается дополнительная смазка;
- Далее при помощи клея крепится мембрана, и ее важно завальцевать по всей окружности.
На этом можно считать установку активатора завершенной. Остается его настроить, чтобы он правильно работал с системой.
Как настроить актуатор турбины
Первый вопрос, который возникает у водителя после установки актуатора на турбину – «Зачем его настраивать?». Ответ на этот вопрос очень простой – если не произвести настройку (или настроить актуатор неправильно), то во время работы турбины в период перегазовок будет ощущаться серьезное дрожание системы. Кроме того, оно будет заметно при остановке двигателя. Еще один момент, который явно указывает на то, что актуатор турбины не настроен должным образом, это недостаточный наддув.
Обратите внимание: Недостаточный наддув может возникать не только по причине плохой настройки турбины. Также он проявляется, если впуск системы негерметичен.
Есть три способа, как настроить актуатор турбины:
- Заменить пружину. Это самый простой вариант, который основывается на том, что при замене пружины устанавливается более упругая деталь, которая увеличивает давление. При необходимости можно установить более мягкую пружину, чтобы это давление снизить;
- Регулировка конца актуатора. Если ослабить конец вестгейта, удастся удлинить тягу перепускного клапана, а если его затянуть, то тяга сократится. Если в результате такой настройки сократить тягу, удастся более плотно прижать заслонку. Соответственно, потребуется большее усилие, чтобы ее открыть. Это приводит к тому, что крыльчатка раскручивается в меньшие сроки;
- Установка буст-контроллера. Еще один вариант, позволяющий повысить наддув. Данный механизм меняет настоящее значение давления. Его требуется установить до вестгейта, чтобы он снижал воздействующее на него давление. Буст-контроллер будет заниматься тем, что выпустит часть воздуха самостоятельно, соответственно, оставив меньше работы для актуатора.
Это три самых распространенных способа настройки актуатора турбины, каждый из которых имеет свои преимущества и недостатки.
Загрузка…Исполнительное устройство, Актуатор — это… Что такое Исполнительное устройство, Актуатор?
- Исполнительное устройство, Актуатор
-
Трёхмерная модель исполнительного устройства, построенная на основе теории эластичности.
Исполни́тельное устро́йство, актуа́тор, актюа́тор — в кибернетике подсистема, передающая воздействие с управляющего устройства на объект управления. Часто рассматривается в качестве подсистемы, входящей в состав объекта управления. Управляющим устройством может быть человек, робот, регулятор или любая другая динамическая система. Входные и выходные сигналы исполнительных устройств, а также их методы воздействия на объект управления могут иметь различную природу.
Примеры и применение
Исполнительное устройство в контуре простейшей следящей системы: сигнал рассогласования ε (разность задающего сигнала r и сигнала обратной связи u) с помощью управляющего устройства преобразуется в сигнал управления v, который передаётся на объект управления.Примеры исполнительных устройств:
- В технике, исполнительные устройства представляют собой преобразователи, превращающие входной сигнал (электрический, оптический, механический, пневматический и др.) в выходной сигнал (обычно в движение), воздействующий на объект управления. Устройства такого типа включают: электрические двигатели, электрические, пневматические или гидравлические приводы, релейные устройства, электростатические двигатели (англ. Comb drive), DMD-зеркала и электроактивные полимеры, хватающие механизмы роботов, приводы их движущихся частей, включая соленоидные приводы и приводы типа «звуковая катушка» (англ. Voice coil), а также многие другие.
- Виртуальные (программные) приборы используют исполнительные устройства и датчики для взаимодействия с объектами реального мира. С помощью датчиков сигнал передаётся в виртуальный прибор, обрабатывается и выдаётся в реальный мир с помощью различного вида исполнительных устройств.
См. также
Литература
- James R. Carstens Automatic Control Systems and Components. — Prentice Hall. — ISBN 0-13-054297-0
- Солодовников В.В. (Ред.) Техническая кибернетика. Теория автоматического регулирования (в четырёх томах).. — М.: 1967.
- Егупов Н.Д., Пупков К.А. (Ред.) Методы классической и современной теории автоматического управления в пяти томах.. — М.: Издательство МГТУ им. Н. Э. Баумана, 2004.
- Андреева Л.Е., Арменский Е.В., Солодовников В.В. и др. Кн. 1 // Техническая кибернетика. Устройства и элементы автоматического регулирования и управления.. — 1973. — С. 672.
Ссылки
Wikimedia Foundation. 2010.
- Исполнитель желаний — 2
- Исполнительные органы акционерного общества
Полезное
Смотреть что такое «Исполнительное устройство, Актуатор» в других словарях:
актуатор — Термин актуатор Термин на английском actuator Синонимы исполнительное устройство, актюатор Аббревиатуры Связанные термины «умные» материалы, биологические моторы, биомедицинские микроэлектромеханические системы, ДНК, клетка, лаборатория … Энциклопедический словарь нанотехнологий
Центральный замок — система централизованной блокировки замков, которая позволяет одновременно закрыть или открыть все двери автомобиля. Система может иметь дистанционное управление и относится к разряду вспомогательных систем автомобиля. Содержание 1 Функции 2… … Википедия
УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Это изобретение относится к устройствам актуаторов, которые используют электроактивные полимеры.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Электроактивные полимеры (ЭАП) представляют собой новый класс материалов среди области материалов, обладающих электрическим откликом. Материалы ЭАП могут работать как датчики или актуаторы, и могут быть легко изготовлены в различных формах, позволяя простую интеграцию в самые разнообразные системы.
Были разработаны материалы с такими характеристиками, как активация напряжения и деформации, которые были значительно улучшены за прошедшие десять лет. Технологические риски были снижены до приемлемых уровней для разработки изделий, так чтобы ЭАП в большей степени были бы коммерчески и технологически привлекательными. Преимущества ЭАП включают в себя малое энергопотребление, малый форм-фактор, гибкость, бесшумную работу, надежность, возможность высокого разрешения, малые времена отклика и возможность многократной активации.
Улучшенные рабочие параметры и определенные преимущества материала ЭАП дают возможность применения в новых областях.
Устройство с ЭАП может быть использовано в любом приложении, в котором желательно малая величина перемещения компонента или признака, основанные на электрической активации. Аналогично, технология может быть использована для считывания малых перемещений.
Использование ЭАП допускает осуществление функций, которые не были возможны прежде, или предоставляет большое преимущество по сравнению с обычными решениями датчиков/актуаторов благодаря комбинации относительно большой деформации и силы в малом объеме или при малом форм-факторе по сравнению с обычными актуаторами. Материалы ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик, и большой диапазон возможных частот активации, например, 0-20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на возбуждаемые полем и ионно-возбуждаемые материалы.
Примеры возбуждаемых полем ЭАП — это диэлектрические эластомеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF или полиуретаны), и жидкокристаллические эластомеры (LCE).
Примеры ионно-возбуждаемых ЭАП — это сопряженные полимеры, композиты полимера с углеродными нанотрубками (УНТ) и композиты ионный полимер-металл (IPMC).
Возбуждаемый полем ЭАП активируется электрическим полем посредством прямой электромеханической связи, тогда как механизм активации для ионных ЭАП предполагает диффузию ионов. Оба класса имеют множество вариантов, и каждый имеет свои собственные преимущества и недостатки.
На Фиг. 1 и 2 показаны два возможных рабочих режима для устройства ЭАП.
Устройство содержит слой электроактивного полимера 14, расположенный между электродами 10, 12 на противоположных сторонах электроактивного полимерного слоя 14.
На Фиг. 1 показано устройство, которое не зафиксировано. Напряжение используется, чтобы заставлять слой электроактивного полимера расширяться во всех направлениях, как это показано.
На Фиг. 2 показано устройство, которое выполнено так, чтобы расширение возникало только в одном направлении. Устройство поддерживается несущим слоем 16. Напряжение используется, чтобы заставлять слой электроактивного полимера изгибаться или искривляться.
Природа этого движения, например, является результатом взаимодействия между активным слоем, который расширяется при активации, и пассивным несущим слоем. Для получения асимметричного изгиба вокруг оси, как это показано, например, может быть применена молекулярная ориентация (растяжение пленки), вызывающая перемещение в одном направлении.
Расширение в одном направлении может возникать из асимметрии в электроактивном полимере, или оно может возникать из асимметрии свойств несущего слоя, или в результате комбинации и того, и другого.
В некоторых приложениях может быть полезной матричная решетка актуаторов, например, в системах позиционирования и управляемой топологии поверхностей. Однако, поскольку возбуждающие напряжения актуаторов достаточно высоки, то сразу же возбуждение каждого актуатора отдельно с помощью его собственной возбуждающей ИС становится дорогостоящим.
Пассивная матрица представляет собой простое воплощение матричной возбуждающей системы, использующей только соединения строки (n строк) и столбца (m столбцов). Если требуется только (n+m) драйверов для адресации к (n x m) актуаторам, то это оказывается гораздо более эффективным в отношении затрат, а также сохраняет стоимость и пространство для дополнительной проводной разводки.
Идеально, если в пассивном матричном устройстве каждый отдельный актуатор должен активироваться до своего максимального напряжения, не влияя на соседние актуаторы. Однако, в матрицах традиционных актуаторов ЭАП (без использования какого-либо порогового напряжения) будет присутствовать некоторое перекрестное влияние соседних актуаторов. Когда для активации одного актуатора прикладывается напряжение, актуаторы вокруг него также испытывают действие напряжения, и будут частично активироваться, что оказывается нежелательным эффектом для многих приложений.
Эта ситуация описана, например, в US 8552846, где раскрывается пассивное матричное возбуждение ЭАП без порогового напряжения или бистабильности. В раскрытом подходе достигнуто лучшее контрастное отношение активации 3:1 (то есть, «не активированные» актуаторы демонстрируют 33% максимальной активации). Это дает контрастное отношение 9:1 для уровня давления, поскольку приложенное давление изменяется как V2. Этот подход также работает только для 2-уровневого возбуждения.
Следовательно, со схемой адресации с пассивной матрицей нет прямого отдельного обращения к каждому актуатору независимо от других.
Использование активной матрицы для адресуемых матриц актуаторов с электроактивным полимером было рассмотрено, например, для электронных приложений для слепых. Подход с активной матрицей предполагает предоставление переключающего узла в каждом актуаторе с электроактивным полимером в пересечении проводника строки и проводника столбца. Таким образом, каждый актуатор в матрице может, если это требуется, индивидуально активироваться. Схема адресации с активной матрицей означает, что возможно иметь любой случайный рисунок актуаторов в матрице, активируемой в одно и то же время.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема возникает в том, что переключающее устройство, например, транзистор, должно выдерживать высокие напряжения активации, требуемые для возбуждения актуаторов с электроактивным полимером. Многие конструкции с ЭАП имеют напряжения активации в сотни вольт, что намного выше возможных напряжений, выдерживаемых существующими транзисторами, подходящими для интеграции в матричное устройство. Таким образом, обычная схема адресации с активной матрицей подходит только для возбуждения актуаторов с электроактивным полимером с помощью специально низких напряжений активации, например, вплоть до около 40 В, если в качестве элементов переключения используются тонкопленочные транзисторы. Выше этого напряжения возникает утечка на переключающем TFT транзисторе управления. Поликремниевые транзисторы будут иметь более низкие пределы напряжения, например, 20 В.
Поэтому, имеется потребность в схеме адресации с активной матрицей, которая позволяет использовать переключающие устройства с относительно низким напряжением для активации актуаторов с электроактивным полимером относительно высоким напряжением.
Задача изобретения заключается в обращении к вышеупомянутой проблеме и восполнении вышеупомянутой потребности. Задача по меньшей мере частично достигается изобретением, как это определено в соответствии с независимыми пунктами формулы. Зависимые пункты формулы задают преимущественные варианты реализации. Изобретение задается пунктами формулы.
В соответствии с примерами и в соответствии с аспектом изобретения, предусмотрено устройство актуатора, содержащее:
активную матричную решетку актуаторов с электроактивным полимером, причем каждый актуатор с электроактивным полимером имеет переключающий узел,
причем переключающий узел содержит:
первую схему, подключенную между первым выводом актуатора с электроактивным полимером и землей, для избирательного приведения первого вывода актуатора с электроактивным полимером в состояние заземления или его подсоединения к разомкнутой цепи;
вторую схему, подключенную между вторым выводом актуатора с электроактивным полимером и землей, для избирательного приведения второго вывода актуатора с электроактивным полимером в состояние заземления или его подсоединения к разомкнутой цепи; и
повышающий элемент, постоянно подключенный между возбуждающим напряжением и первым выводом актуатора с электроактивным полимером.
Управляя обоими выводами актуатора с электроактивным полимером, становится возможным сохранять напряжение на актуаторе и затем обеспечивать плавающий вывод так, чтобы ток не мог течь через устройство. Это уменьшает статическое потребление мощности.
Каждая из первой и второй схем может содержать ряд последовательно соединенных транзисторов между соответствующим выводом актуатора с электроактивным полимером и землей. Посредством последовательного ряда транзисторов по направлению к земле каждый транзистор может подвергаться действию напряжения (на его затворе или на его затворе-истоке или на его затворе-стоке), которое мало, по сравнению с возбуждающим напряжением устройства с электроактивным полимером.
Последовательно соединенные транзисторы — это, например, транзисторы n-типа.
Второй повышающий элемент может быть подключен между вторым возбуждающим напряжением и вторым выводом актуатора с электроактивным полимером. Это означает, что каждый из обоих выводов может подключаться к по меньшей мере двум различным напряжениям. В свою очередь, это позволяет осуществить трехуровневую возбуждающую схему, даже только с двумя различными уровнями возбуждения, предоставляемыми на схему в целом.
Возбуждающее напряжение и второе возбуждающее напряжение могут быть одним и тем же напряжением. В этом случае положительное или отрицательное напряжение может быть выдано на устройство так, что оказывается возможной инверсионная возбуждающая схема.
Возбуждающее напряжение и второе возбуждающее напряжение могут быть различными. В этом случае, может быть обеспечена трехуровневая схема возбуждения с одинаковой полярностью.
Каждая из первой и второй схемы может содержать:
транзистор адресации и запоминающий конденсатор для выдачи данных о напряжении на затвор первого из упомянутых последовательно соединенных транзисторов; и
схему управления смещением для управления напряжениями затвора других из упомянутых последовательно соединенных транзисторов.
Это позволяет сохранять уровень возбуждения в схеме.
Схема управления смещением каждой из первой и второй схем может содержать:
напряжение смещения, связанное с затвором второго из упомянутых последовательно соединенных транзисторов; и
ряд транзисторов управления с соответствующим транзистором, подключенным между затворами каждой соседней пары других из упомянутых последовательно соединенных транзисторов.
Благодаря соединению затворов между собой, транзисторы могут быть подключены все вместе (с напряжением смещения) для обеспечения канала заземления.
Транзисторы управления могут быть транзисторами p-типа.
Транзисторы, например, представляют собой тонкопленочные транзисторы, например, низкотемпературные поликремниевые транзисторы.
В качестве примера, максимальное напряжение исток-сток может быть меньше 50 В, например, меньше 40 В, и возможно даже меньше 25 В, тогда как максимальное напряжение выдаваемое на устройство с электроактивным полимером, оказывается больше 50 В, например, больше 60 В, возможно больше 70 В и возможно больше 80 В. Напряжения затвор-исток и затвор-сток также могут быть ограничены упомянутыми выше уровнями напряжения, так, чтобы в конкретной конструкции и на затвор-исток, и на затвор-сток, и на сток-исток могло быть подано максимальное напряжение.
Примеры в соответствии с другим объектом изобретения предусматривают способ активации устройства, которое содержит активную матричную решетку актуаторов с электроактивным полимером, причем каждый актуатор с электроактивным полимером имеет переключающий узел, причем переключающий узел содержит первую схему, подключенную между первым выводом актуатора с электроактивным полимером и землей, для избирательного приведения первого вывода актуатора с электроактивным полимером в состояние заземления или его подсоединения к разомкнутой цепи, и вторую схему, подключенную между вторым выводом актуатора с электроактивным полимером и землей, для избирательного приведения второго вывода актуатора с электроактивным полимером в состояние заземления или его подсоединения к разомкнутой цепи, причем способ содержит:
сохранение ненулевого напряжения на актуаторе с электроактивным полимером:
приведения первого вывода в состояние напряжения активации с помощью первой схемы, приведенной в состояние к разомкнутой цепи, и приведение второго вывода к состоянию заземления с помощью второй схемы; и
сохранения нулевого напряжения на электроактивном полимере посредством:
приведения первого и второго выводов в состояние заземления с помощью первой и второй схем; и
последующего приведения первой и второй схем в состояние разомкнутой цепи.
При приведении обоих выводов в состояние заземления схемы соответственно становятся разомкнутой цепью, так чтобы не было больше канала для заземления через актуатор с электроактивным полимером. Таким образом, статическое потребление мощности уменьшается.
Приведение первого вывода в состояние напряжения активации может содержать подачу возбуждающего напряжения на первый вывод через повышающий элемент. Он может содержать, например, резистор.
Способ может содержать после приведения первого вывода в состояние напряжения активации с помощью первой схемы, приведенной в состояние разомкнутой цепи, и приведения второго вывода в состояние заземления с помощью второй схемы, приведение второй схемы в состояние разомкнутой цепи.
Таким образом, статическое потребление мощности может быть уменьшено, когда актуатор с электроактивным полимером приведен в состояние напряжения активации.
Способ может дополнительно содержать сохранение второго напряжения на актуаторе с электроактивным полимером посредством:
приведения второго вывода в состояние второго напряжения активации с помощью второй схемы, приведенной в состояние разомкнутой цепи, и приведение первого вывода в состояние заземления с помощью первой схемы.
Таким образом, напряжением на обоих выводах можно управлять так, чтобы была осуществлена схема возбуждения с тремя уровнями.
Приведение второго вывода в состояние второго напряжения активации может содержать подачу второго возбуждающего напряжения на второй вывод через второй повышающий элемент.
Второе возбуждающее напряжение может быть таким же, что и возбуждающее напряжение, или второе возбуждающее напряжение и возбуждающее напряжение могут быть разными.
Например, способ может содержать поочередную выдачу на актуатор с электроактивным полимером возбуждающих напряжений противоположной полярности. Это предоставляет инверсионную схему управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения описываются ниже подробно в связи с сопровождающими чертежами, на которых:
Фиг. 1 изображает известное устройство с электроактивным полимером, которое не зафиксировано;
Фиг. 2 изображает известное устройство с электроактивным полимером, которое ограничено защитным слоем;
Фиг. 3 изображает типичную схему с активной матрицей для одного актуатора с электроактивным полимером;
Фиг. 4 изображает типичную схему адресации с активной матрицей;
Фиг. 5 изображает первый пример высоковольтной схемы, использующей низковольтные транзисторы;
Фиг. 6 изображает второй пример высоковольтной схемы, использующей низковольтные транзисторы;
Фиг. 7 изображает модификацию схемы с Фиг. 6 для того, чтобы она была пригодна для возбуждения актуатора с электроактивным полимером;
Фиг. 8 изображает модификацию схемы с Фиг. 7 для обеспечения функции сохранения сигнала;
Фиг. 9 изображает первый пример возбуждающей схемы актуатора с электроактивным полимером;
Фиг. 10 изображает второй пример возбуждающей схемы актуатора с электроактивным полимером;
Фиг. 11 изображает третий пример возбуждающей схемы актуатора с электроактивным полимером для осуществления схемы управления с общим электродом;
Фиг. 12 изображает первый пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 13 изображает то, как устройство на Фиг.12 изменяет характеристику смещение-напряжение;
Фиг. 14 изображает второй пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 15 изображает третий пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 16 изображает четвертый пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 17 изображает пятый пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 18 изображает то, как устройство с Фиг.17 изменяет характеристику смещение-напряжение;
Фиг. 19 изображает шестой пример устройства с электроактивным полимером с пороговой характеристикой;
Фиг. 20 изображает возбуждающую схему для актуатора с электроактивным полимером с использованием диодов;
Фиг. 21 служит для пояснения последовательности адресации с использованием схемы с Фиг. 20;
Фиг. 22 изображает возбуждающую схему для актуатора с электроактивным полимером с использованием MIM диода; и
Фиг. 23 изображает возбуждающую схему для актуатора с электроактивным полимером с использованием двух управляющих транзисторов.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Изобретение предусматривает активную матричную решетку актуаторов с электроактивным полимером, причем каждый актуатор с электроактивным полимером имеет переключающий узел. Актуатор содержит структуру с электроактивным полимером для обеспечения механической активации, так что структура задает неактивируемое состояние и по меньшей мере одно активируемое состояние (отличное от неактивируемого состояния), достигаемое подачей электрического возбуждающего сигнала на структуру с электроактивным полимером. Структура с электроактивным полимером при этом содержит материал ЭАП. Такой материал может производить или допускать механическую деформацию после воздействия на него электрического сигнала, который может быть подан на структуру в виде электрического возбуждающего сигнала. Актуатор или структура могут иметь электродный узел для подачи возбуждающего сигнала на материал ЭАП. Электродная структура может быть непосредственно прикреплена к материалу ЭАП или с промежуточными слоями между ними. Слой материала ЭАП каждого блока может быть расположен между электродами электродной структуры. Альтернативно, электроды могут быть на одной и той же стороне материала ЭАП. В любом случае, электроды могут быть физически прикреплены к материалу ЭАП или напрямую, без каких-либо (пассивных) слоев между ними, или опосредованно, с дополнительными (пассивными) слоями между ними. Но это не всегда должно быть так. Для релаксорного или для пьезоэлектрического или сегнетоэлектрического ЭАП непосредственный контакт не является необходимым. В последнем случае электроды вблизи ЭАП оказываются достаточными, если только электроды могут обеспечить электрическое поле для ЭАП, структура электроактивного полимера будет выполнять свою функцию активации. Электроды могут быть растяжимыми, так чтобы они следовали за деформацией слоя материала ЭАП.
Переключающий узел содержит первую схему, подключенную к первому выводу актуатора с электроактивным полимером, для избирательного приведения первого вывода актуатора с электроактивным полимером в состояние заземления или его приведения в состояние разомкнутой цепи. Вторая схема подключена ко второму выводу актуатора с электроактивным полимером, для избирательного приведения второго вывода актуатора с электроактивным полимером в состояние заземления или его приведения в состояние разомкнутой цепи. Управляя обоими выводами актуатора с электроактивным полимером, оказывается возможным уменьшить статическое потребление мощности по меньшей мере тогда, когда не сохраняется напряжение на актуаторе с электроактивным полимером.
На Фиг. 3 показана типичная схема с активной матрицей для использования в решетке актуаторов с электроактивным полимером. Решетка расположена в строках и столбцах с проводниками 30 строк и проводниками 32 столбцов. Предпочтительно, имеются множественные строки и столбцы, так чтобы минимальной была решетка 2×2. Может иметься множество строк и столбцов, например, десятки или сотни строк и/или столбцов. Схема, такая как на Фиг. 3, имеется в каждом перекрещивании (то есть, пересечении) проводников строк и столбцов. Схема содержит транзистор 34, например, тонкопленочный полевой транзистор, с его затвором, соединенным с проводником 30 строки, и его истоком, соединенным с проводником 32 столбца. Транзистор включается импульсом выборки на проводнике строки, и тогда он подает напряжение на проводник 32 столбца актуатора 36 с электроактивным полимером и на запоминающий конденсатор 38.
Имеется решетка m x n актуаторов с электроактивным полимером, причем каждый приводится в действие активной схемой возбуждения, как показано на Фиг. 3. Имеется m проводников строк (адресные линии) и n проводников (линии данных) столбцов, где n≥2 и m≥2, например, n≥4 или n≥10, или n≥50 и/или m≥4, или m≥10 или m≥50. Первый электрод актуатора 36 с электроактивным полимером — это приводной электрод. Второй электрод актуатора с электроактивным полимером связан с опорным напряжением Vref, которое может быть общим для многих или всех актуаторов с электроактивным полимером в решетке. Запоминающий конденсатор 38, параллельный актуатору с электроактивным полимером, является необязательным и способствует поддержанию напряжения, приложенного к актуатору с электроактивным полимером.
Работа схемы заключается в передаче данных о напряжении на приводной электрод актуатора с электроактивным полимером только тогда, когда затвор выбранного транзистора 34 адресован, заставляя TFT стать проводящим. После того, как адресация завершена, транзистор становится непроводящим, и напряжение поддерживается на актуаторе с электроактивным полимером до тех пор, пока оно или не утечет, или пока актуатор с электроактивным полимером не будет снова адресован. Таким образом, схема работает как схема выборки-хранения, в соответствии с чем (необязательный) запоминающий конденсатор способствует поддержанию напряжения, приложенного к актуатору с электроактивным полимером.
После адресации актуатор с электроактивным полимером будет деформироваться к новому состоянию активации в зависимости от возбуждающего напряжения (Vdr), которое присутствует между электродом данных и опорным электродом. Следует отметить, что активация может длиться значительно дольше, чем период адресации (который обычно бывает намного меньше чем 1 мс). Различные уровни активации могут быть реализованы подачей различных возбуждающих напряжений.
Адресация решетки происходит так, как показано на Фиг. 4, где показан пример решетки 4×4 с опорным электродом, установленным на Vref=0 В. Отправная точка (не показана) соответствует тому, что все актуаторы с электроактивным полимером разряжены и, следовательно, находятся в своем неактивированном состоянии. Светлые кружки отображают актуаторы, которые не активированы, темные кружки — это актуаторы, которые активированы.
Все строки изначально адресуются напряжением без выбора (Vns: обычно 10 В для типичного TFT). В этой ситуации, никакие данные не могут быть переданы на актуаторы с электроактивным полимером.
Первая строка затем адресуется напряжением выбора (Vsel обычно +30 В для типичного TFT). Это показано на Фиг. 4A. Другие строки не выбраны (Vns). Два столбца приведены с возбуждающим напряжением Vdr, а другие два столбца приведены с 0 В, и эти напряжения передаются на первый электрод соответствующих актуаторов с электроактивным полимером. В этой ситуации, разность напряжений на двух из актуаторов с электроактивным полимером составляет Vdr: эти два актуатора с электроактивным полимером в строке будут в активированном режиме (активация может продолжаться после того, как адресация завершена). Разность напряжений на других двух актуаторах с электроактивным полимером составляет 0 В, в соответствии с чем эти два актуатора с электроактивным полимером в строке останутся в неактивированном режиме.
Вторая строка затем адресуется напряжением выбора (Vsel), как показано на Фиг. 4B. Другие строки не выбраны (Vns). И опять, два столбца приведены с возбуждающим напряжением Vdr, и два столбца приведены с 0 В, и эти напряжения передаются на первый электрод соответствующих актуаторов с электроактивным полимером. В этой ситуации разность напряжений на двух из актуаторов с электроактивным полимером s составляет Vdr: эти два актуатора с электроактивным полимером в строке будут в активированном режиме (активация может продолжаться после того, как адресация завершена). Разность напряжений на других двух актуаторах с электроактивным полимером составляет 0 В, в соответствии с чем эти два актуатора с электроактивным полимером в строке останутся в неактивированном режиме.
Отменяя выбор первой строки, характер выборки-хранения адресации гарантирует то, что актуаторы с электроактивным полимером в первой строке поддерживают свое напряжение (особенно, если подключен запоминающий конденсатор), и остаются в своем состоянии активации (или продвигаются к этому состоянию, если оно еще не достигнуто).
Третья строка затем адресуется напряжением выбора (Vsel), как показано на Фиг. 4C. Другие строки не выбраны (Vns). Теперь три столбца приведены с возбуждающим напряжением Vdr, один столбец приведен с 0 В, и эти напряжения передаются на первый электрод соответствующих актуаторов с электроактивным полимером. В этой ситуации, разность напряжений на трех из актуаторов с электроактивным полимером составляет Vdr: эти три актуатора с электроактивным полимером в строке будут в активированном режиме (активация может продолжаться после того, как адресация завершена). Разность напряжений на другом актуаторе с электроактивным полимером составляет 0 В, в соответствии с чем этот актуатор с электроактивным полимером останется в неактивированном режиме. Отменяя выбор второй строки, характер выборки-хранения адресации снова гарантирует то, что актуатор с электроактивным полимером в этой строке поддерживает свое напряжение.
Четвертая строка затем адресуется напряжением выбора (Vsel), как показано на Фиг. 4D. Другие строки не выбраны (Vns). Только один столбец приведен с возбуждающим напряжением Vdr, и другие три столбца — с 0 В. Разность напряжений только на одном из актуаторов с электроактивным полимером составляет Vdr.
В конце фазы адресации, выбор всех строк может быть отменен (Vns), и напряжения могут быть удалены из столбцов, в соответствии с чем актуаторы с электроактивным полимером останутся в своем состоянии активации, пока их напряжение не утечет, и тогда матрица может быть переадресована, как описано выше.
Возможно адресовать несколько строк актуаторов с электроактивным полимером в одно и то же самое время, в соответствии с чем адресация будет проходить еще быстрее. Это достигается подачей напряжения адресации на более чем одну строку актуаторов с электроактивным полимером в одно и то же время. Это возможно, если должен быть применен один и тот же шаблон данных.
В вышеупомянутом примере рассматривается только двухуровневый драйвер данных (0 В и Vdr). Это приведет к наименьшей стоимости ИС драйвера. Однако в дополнительных примерах может быть предпочтительным также частично активировать актуатор с электроактивным полимером. Для получения такой возможности может быть использован драйвер данных с множественными данных о напряжении вплоть до Vdr.
Кроме того, хотя в вышеприведенном примере на актуатор с электроактивным полимером подаются напряжения одной полярности, в дополнительных вариантах реализации может быть предпочтительным инвертировать полярность напряжения на актуаторах с электроактивным полимером с равными временными интервалами, посредством чего рабочие параметры актуатора с электроактивным полимером ухудшатся меньше, чем в случае, когда инверсия не будет использована. Это может быть достигнуто, например, изменением напряжения на опорном электроде в дополнительном цикле адресации и соответственной адаптацией возбуждающих напряжений.
Основная схема адресации с активной матрицей, описанная выше, требует, чтобы транзисторы могли выдерживать такие же напряжения, что и те, что используются для возбуждения актуаторов с электроактивным полимером.
Данное изобретение относится к использованию переключающих устройств, таких как низковольтные поликремниевые транзисторы, которые работают при более низких напряжениях, чем возбуждающие напряжения актуаторов с электроактивным полимером.
Известны методики высоковольтного нагревания, которые используют транзисторные управляемые переключения, которые работают при более низких напряжениях, чем необходимо для нагревателя.
На Фиг. 5 показан первый пример схемы управления для нагревателя на 60 В. На Фиг. 5(a) показан выключенный нагреватель, и на Фиг. 5(b) показан включенный нагреватель.
Используемые в схеме транзисторы представляют собой TFT транзисторы на 20 В, что является, например, пределом напряжения для низкотемпературного поликремниевого (LTPS) TFT.
Схема содержит повышающий резистор 50, подсоединенный к высоковольтной линии на 60 В Vddout, и понижающую схему, которая содержит три последовательных транзистора n-типа от N1 до N3. На нижний транзистор N1 подается возбуждающее напряжение, которое переключается между 0 и 20 В. На второй транзистор N2 подается напряжение смещения. Схема 52 смещения управляет напряжением, подаваемым на транзистор N3, и она включает в себя два транзистора P1 и P2 p-типа. Первый транзистор P1 p-типа находится между затворами второго и третьего транзисторов N2, N3 n-типа с их затворами, соединенными с узлом между транзисторами N2, N3. Когда P1 закрыт, напряжение смещения приложено к затворам обоих транзисторов N2, N3, так что они оба оказываются закрытыми. Второй транзистор P2 p-типа находится между затвором и истоком третьего транзистора N3 n-типа с его затвором, соединенным с затвором второго транзистора N2 n-типа. Когда P2 закрыт, то нет никакого напряжения исток-сток для транзистора N3, и транзистор N3 оказывается открытым.
На Фиг. 5A показаны напряжения в схеме, когда входное возбуждающее напряжение велико (20 В), когда P1 включен, и P2 выключен. Это означает, что транзисторы N1-N3 имеют напряжение на затворе 20 В, и выходное напряжение понижается до заземления (0 В), как и узлы между N1 и N2 и между N2 и N3.
На Фиг. 5B показаны напряжения в схеме после того, как входное возбуждающее напряжение переключено на низкий уровень (0 В), и при этом N1 выключен, а выходное напряжение повышается до высокого уровня. Схема в целом функционирует как разомкнутая цепь, поскольку нет соединения с землей вследствие выключенного N1. В отсутствие повышающего резистора 50 и его подключений, выход будет плавающим.
В свою очередь, узел между N2 и N3 повышен до высокого уровня, что заставляет P1 отключиться и P2 включиться. Из симметрии, установившееся напряжение между N2 и N3 составит 40 В и установившееся напряжение между N2, и N1 составит 20 В, при том, что токи утечки через транзисторы от N1 до N3 все равны.
На Фиг. 6 показан пример схемы управления для нагревателя на 80 В. Понижающая схема содержит четыре последовательных транзистора от N1 до N4 n-типа, а схема 54 смещения управляет напряжением, подаваемым на транзисторы N3 и N4, и она включает в себя четыре транзистора P1 в P4 p-типа. Схема смещения содержит две схемы 52 смещения с Фиг. 5, расположенные одна над другой. И опять, или все транзисторы n-типа включены для перевода выхода на низкий уровень, или же нижний транзистор выключен, и падение напряжения разделяется на каждый транзистор n-типа.
На Фиг. 6A показаны напряжения в схеме, когда входное возбуждающее напряжение имеет высокий уровень (20 В), а на Фиг. 6B показаны напряжения в схеме после того, как входное возбуждающее напряжение переключено на низкий уровень (0 В).
При использовании этих схем для нагревания высокое напряжение падает на резисторе, и предполагается, что резистор может поддерживать высокое напряжение, что обычно и бывает. Однако для устройства с электроактивным полимером устройство имеет емкостную эквивалентную схему.
Подход тогда может состоять в том, чтобы использовать схему с Фиг. 7, в которой нагрузкой является актуатор ЭАП, который является теперь дополнением к повышающему уровень резистору.
Проблема схемы, такой как показанная на Фиг. 7, состоит в том, что имеется статическое потребление мощности, когда понижающая схема находится во включенном состоянии, то есть когда один или оба вывода актуатора ЭАП понижены до уровня 0 В. Также схема не имеет сохранения возбуждающего сигнала.
Проблема сохранения легко решается, как это показано на Фиг. 8.
Предусмотрен транзистор 80 адресации, который допускает напряжение данных Vdata, которое находится, например, на линии столбца для подачи на локальный запоминающий конденсатор 82. Затвор транзистора 80 адресации связан с линией 81 адресации, на которую выдается напряжение адресации Vaddr. Линия адресации — это, например, проводник строки.
Актуатор с электроактивным полимером может приводиться в действие напряжением между 80 В в этом примере и 0 В с низковольтной схемой адресации, где Vaddr (например, в пределах от 0 до 20 В) представляет собой стандартные сигналы адреса строки матричной решетки, и Vdata составляет также, например, в пределах от 0 до 20 В.
Проблема статического потребления мощности остается, и схема может только достигнуть двух уровней напряжения на устройстве с электроактивным полимером.
Изобретение предоставляет схемный подход, который решает одну или более из этих проблем, первый пример которого показан на Фиг. 9.
Схема содержит первую схему 90, как показано на Фиг. 8, и вторую схему 92, как показано на Фиг. 8, но совместно использующие общий повышающий уровень резистор 50, который соединяется с одним выводом актуатора с электроактивным полимером (задаваемым как первый вывод). Таким образом, полная схема имеет две линии 94, 96 адресации строк и две линии 98, 100 данных столбцов.
Выход первой схемы 90 подсоединен к одной стороне актуатора 36 с электроактивным полимером, а выход второй схемы 92 подсоединен к другой стороне актуатора 36 с электроактивным полимером. Таким образом, полная схема управления имеет доступ к обеим сторонам актуатора 36 с электроактивным полимером, и в результате оказывается возможным преодолеть проблему статического потребления мощности.
Посредством адресации сигналов Vaddr1,2 и Vdata1,2 низкого напряжения становится возможным возбуждение с двумя уровнями без статического потребления мощности.
Предоставляя Vdata1 и Vdata2 с высоким уровнем (когда соответствующие сигналы адреса строки подключены), обе стороны актуатора с электроактивным полимером будут связаны с землей. Напряжение Vdata2 может быть тогда приведено к низкому значению (пока Vaddr2 все еще подключено). На актуаторе с электроактивным полимером останется 0 В, но второй вывод будет плавающим, так чтобы ток не мог протекать через сам актуатор с электроактивным полимером.
Понижение напряжения Vdata1 в той же мере (пока Vaddr1 все еще подключено) не только остановит протекание тока через актуатор с электроактивным полимером, но также предотвратит потребление тока от главного источника питания. Актуатор с электроактивным полимером будет иметь уровень 0 В сохраненным, но ток не будет течь через актуатор с электроактивным полимером, и он будет плавающим вплоть до подачи высокого напряжения (на оба вывода).
Следует отметить, что только первая схема 90 требует переключения к состоянию с высоким импедансом для достижения высокого напряжения на актуаторе, тогда как обе схемы 90, 92 поддерживаются в состоянии высокого импеданса для низкого (то есть нулевого) напряжения, поддерживаемого на актуаторе. Поэтому, адресация с Vaddr1 и Vaddr2 для достижения высокого напряжения на актуаторе, Vdata1 должно начинаться с высокого уровня и переходить к низкому уровню в пределах периода адресации. Для низкого напряжения, и Vdata1, и Vdata2 начинаются с высокого уровня и переходят к низкому уровню в течение периода адресации.
Для адресации актуатора с электроактивным полимером высоким напряжением предоставляется измененная схема управления.
Установка Vdata1 на низкий уровень (так, чтобы схема 90 представляла собой разомкнутую цепь) и Vdata2 на высокий уровень (так, чтобы схема 92 заземлила свой вывод актуатора с электроактивным полимером), когда соответствующие сигналы адреса строки подключены, заставит выдать возбуждающее напряжение Vddout (например, 80 В) на актуатор с электроактивным полимером.
Эти напряжения могут тогда быть поддержаны, чтобы вызвать сохранение 80 В без протекания тока после того, как сигнал адресации перейдет на низкий уровень.
Схема 92 может быть тогда приведена в состояние разомкнутой цепи. Это предотвратит протекание тока через актуатор, поскольку один вывод является плавающим. Это опять же предотвращает статическое потребление мощности.
На Фиг. 10 показана модификация схемы с Фиг. 9, в которой каждая схема 90, 92 имеет свое собственное соответствующее повышающее уровень устройство 50, 100, так чтобы было одно повышающее уровень устройство, подсоединенное к каждому выводу актуатора 36 с электроактивным полимером.
Это позволяет получить трехуровневую схему возбуждения.
В качестве примера на устройство с электроактивным полимером могут быть выданы уровни напряжения 80 В, 0 В, и -80 В.
Поэтому эта конфигурация схемы может быть использована для предоставления возбуждающей схемы с инверсией высокого напряжения. Предварительно наблюдалось, что такое инверсионное возбуждение как улучшает амплитуду активации, так и уменьшает дрейф активации при длительном использовании.
Адресация может происходить следующим образом.
(i) Для приведения к +80 В
Напряжения Vaddr1,2 делаются высокими, Vdata1 имеет высокий уровень (схема 90 заземлена), и Vdata2 имеет низкий уровень (схема 92 — разомкнутая цепь). Актуатор с электроактивным полимером таким образом заряжается до 80 В (то есть вывод, соединенный со второй схемой 92 находится под более высоким напряжении, чем вывод, соединенный с первой схемой 90). Тогда Vaddr1,2 делается низким. Конденсаторы 82 поддерживают те же самые напряжения.
(ii), Для приведения к 0 В
Напряжения Vaddr1,2 делаются высокими. Напряжения Vdata1,2 изначально высоки, так чтобы обе схемы были заземлены. Они затем делаются низкого уровня, так чтобы оба вывода актуатора с электроактивным полимером были при том же самом напряжении, но не было бы статического потребления мощности, поскольку выводы актуатора с электроактивным полимером переходят к напряжению электропитания. Напряжения Vaddr1,2 затем переходят к низкому уровню.
Работа схем 90 и 92 синхронизирована по времени.
(ii), Для приведения к -80 В
Напряжения Vaddr1,2 делаются высокими. Напряжение Vdata1 имеет низкий уровень (схема 90 — разомкнутая цепь), и Vdata2 имеет высокий уровень (схема 92 заземлена). Актуатор с электроактивным полимером таким образом заряжается до -80 В (то есть, вывод, соединенный со второй схемой 92 находится под более низким напряжением, чем вывод, соединенный с первой схемой 90). Тогда Vaddr1,2 переходят к низкому уровню. Конденсаторы 82 поддерживают те же самые напряжения.
Если два напряжения питания, которые показаны как 80 В на Фиг. 10, изменяются до различных уровней (каждый 80 В или меньше), то могут быть получены различные наборы напряжений на актуаторе с электроактивным полимером, например, подачи 80 В и 60 В достигали бы на актуаторе с электроактивным полимером значений 80 В, 0 В и -60 В.
Описанный выше подход реализует ограниченное число уровней возбуждения. Однако промежуточные уровни активации могут быть получены применением схем широтно-импульсной модуляции (PWM). Подход PWM может, например, помочь для некоторых типов устройства, особенно для поддержания устойчивого состояния.
Вышеприведенные примеры используют последовательности разгрузочных транзисторов для получения возможности использовать транзисторы низкого напряжения. Другой подход состоит в использовании возбуждения с противоэлектродом.
На Фиг. 11 показана основная переключающая схема с активной матрицей, содержащая проводник 30 строки, проводник 32 столбца, транзистор 34 и актуатор 36 с электроактивным полимером. Один вывод актуатора с электроактивным полимером соединен с транзистором 34, а другой соединен с общим противоэлектродом 110, на который подается напряжение Vce противоэлектрода. Также может быть предусмотрен запоминающий конденсатор 38. Транзистор может быть тонкопленочным транзистором, и он может быть поликремниевым или из аморфного кремния.
Противоэлектрод 110 может быть общим для подмножества актуаторов с электроактивным полимером, например, для всех актуаторов с электроактивным полимером в строке адресации, или он может быть общим для всех актуаторов с электроактивным полимером в матрице. Традиционное приведение в действие такой схемы с активной матрицей ограничивает возбуждающее напряжение приблизительно до 40 В.
Способ возбуждения напряжением высокого уровня для активной матричной решетки может быть достигнут приведением в действие матрицы как от соединения с противоэлектродом, так и от драйвера данных. Таким образом, высокое возбуждающее напряжение может быть выдано на выбранные актуаторы с электроактивным полимером в матрице без введения высокого напряжения на приводной электрод. Это гарантирует, что транзистор 34 адресации не подвергается действию высоких напряжений, поскольку высокое напряжение присутствует только на противоэлектроде. В результате он не будет иметь утечки, в целом стареть или выходить из строя.
Противоэлектрод может быть установлен на другое (второе) ненулевое напряжение перед применением возбуждающих напряжений от драйвера данных. Таким образом, более высокое напряжение на актуаторе с электроактивным полимером может быть достигнуто с драйвером данных о напряжения.
В частности, напряжение активации равно возбуждающему напряжению, меньшему напряжения противоэлектрода. В этом случае выгодно, если актуатор с электроактивным полимером имеет пороговое напряжение, которое является по меньшей мере столь же высоким, как и второе напряжение противоэлектрода, чтобы избежать того, что все актуаторы с электроактивным полимером будут активированы. Варианты осуществления пороговых напряжений обсуждаются ниже.
В первом примере использования схемы с Фиг. 11 предполагается, что актуаторы с электроактивным полимером имеют пороговое напряжение 30 В и напряжение активации 60 В, что превышает нормальный диапазон адресации активной матрицы. Пороговое напряжение представляет собой уровень активации, ниже которого имеется сильно уменьшенная активация по сравнению с активацией выше порога. Высоковольтное возбуждение происходит следующим образом, предполагая актуатор с электроактивным полимером находящимся в начальном, неактивированном состоянии.
Все драйверы данных в матрице устанавливаются на опорное напряжение, например, 0 В.
В это время напряжение Vce противоэлектрода составляет 0 В. Все транзисторы 34 адресации тогда переводятся в состояние адресации (проводящее состояние), например, с их электродами затвора при 40 В. Это гарантирует, что напряжение на приводном электроде каждого актуатора с электроактивным полимером остается на уровне 0 В при подключении напряжений драйвера данных, имеющихся на проводниках 32 столбца.
Напряжение Vce (например, +60 В) противоэлектрода, подаваемое на все актуаторы с электроактивным полимером, переводится на общий противоэлектрод 110. Когда это напряжение приложено, ток течет в устройство для зарядки емкости, пока противоэлектрод не достигнет приложенного напряжения, и это 60 В на актуаторе с электроактивным полимером. В этот момент вследствие малой скорости отклика все актуаторы с электроактивным полимером находятся в том же самом физически неактивированном состоянии, пока заряд на актуаторах с электроактивным полимером совместим с активированным состоянием. В результате, все актуаторы с электроактивным полимером начнут активироваться, если они не деактивированы в фазе адресации.
В этой фазе адресации все транзисторы 34 адресации сначала переводятся в состояние без адресации (не проводящее), например, с их электродами затвора при -5V.
Данные затем подаются на одну линию решетки одновременно обычным образом (адресуясь к одной линии транзисторов адресации одновременно). В этом случае, данные активации будут 0 В, поскольку это затронет те актуаторы с электроактивным полимером, которые должны переключить положение для выполнения этого. Подавая 0 В на актуатор с электроактивным полимером, будет 60 В на актуаторе с электроактивным полимером. Напряжение данных 30 В вместо этого приведет к напряжению +30 В на устройстве, которое будет ниже порога, и актуатор с электроактивным полимером или не будет активироваться (если адресация выполняется немедленно), или возвратится к неактивированному состоянию (если имеется задержка перед адресацией).
Таким образом, все актуаторы с электроактивным полимером электрически приводятся в их активированное состояние. Это состояние или поддерживается после адресации, или оно полностью изменяется прежде, чем актуаторы имели время для физического отклика.
В этом примере, напряжения линии данных содержат первый уровень возбуждения, который составляет 0 В, и второй уровень возбуждения, который составляет 30 В.
Напряжения общего электрода содержат третий уровень возбуждения, который составляет 0 В, и четвертый уровень возбуждения, который составляет 60 В. Вообще, напряжение четвертого уровня возбуждения больше, чем напряжение второго уровня возбуждения.
Напряжение четвертого уровня возбуждения (60 В) — это максимальное возбуждающее напряжение, так что когда оно подается, актуатор электрически приводится в свое максимальное состояние активации (когда напряжение данных — нуль). Разность между напряжениями второго и четвертого уровней возбуждения (60 В — 30 В=30 В в этом примере) равно или меньше, чем пороговое напряжение, так, чтобы, когда напряжение данных устанавливается на втором уровне возбуждения (30 В) имеется отмена адресации.
Транзисторы адресации становятся проводящими в течение периода, когда напряжение противоэлектрода переключается, поскольку иначе напряжение на приводном электроде также переключится на напряжение противоэлектрода (поскольку ток не может течь), и транзистор адресации будет поврежден.
Напряжение общего электрода может остаться на высоком уровне. Для выключения устройства в целом, все линии данных могут быть приведены к 0 В для выключения транзисторов, и затем напряжение общего электрода может приведено к 0 В управляемым образом.
Во втором осуществлении предполагается, что актуаторы с электроактивным полимером имеют пороговое напряжение 60 В и напряжение активации 90 В, что превышает обычный диапазон адресации активной матрицы. Высоковольтное возбуждения происходит следующим образом, предполагая, что актуатор с электроактивным полимером находится в начальном, неактивированном состоянии.
Все драйверы данных в структуре устанавливаются на опорное напряжение, например, 0 В.
Напряжение Vce противоэлектрода составляет 0 В в это время. Все транзисторы адресации переводятся в состояние адресации (проводящее), например, с их электродами затвора на 40 В. Это гарантирует, что напряжение на приводном электроде остается на уровне 0 В.
Напряжение Vce противоэлектрода (-60 В), подаваемое на все актуаторы с электроактивным полимером переводится на общий противоэлектрод. Когда это напряжение подано, ток течет в устройство для повышения заряда емкости устройства, пока противоэлектрод не достигнет приложенного напряжения (то есть, 60 В на актуаторе с электроактивным полимером). В этот момент, все актуаторы с электроактивным полимером находятся в том же самом состоянии (то есть, не активированном) с зарядом на актуаторах с электроактивным полимером, что является совместимым с этим состоянием активации.
Все транзисторы адресации тогда переводятся в состояние без адресации (не проводящее), например, с их электродами затвора при -5V.
Данные подаются на одну линию матрицы одновременно обычным образом (адресацией к одной линии транзисторов адресации одновременно). В этом случае, данные активации будут 30 В, поскольку это затронет те актуаторы с электроактивным полимером, которые должны переключить положение, чтобы сделать так (90 В на устройстве). Напряжение данных 0 В приведет к напряжению 60 В на устройстве, которое будет ниже порога, и устройство не будет активироваться.
Этот способ отличается от первого тем, что начальный перевод приводит к неактивированному состоянию, и адресация строка за строкой должна переключить актуаторы с электроактивным полимером в адресованное состояние.
В этом примере напряжения линии данных содержат первый уровень возбуждения, который составляет 0 В и второй уровень возбуждения, который составляет 30 В.
Напряжение четвертого уровня возбуждения (-60 В) — это отрицательное напряжение величиной равной или меньшей, чем пороговое напряжение (60 В в этом примере), и напряжение второго уровня управления — это положительное напряжение (30 В в этом примере), так что разность между напряжениями второго и четвертого уровней возбуждения равна максимальному возбуждающему напряжению (30 В — — 60 В=90 В). Один четвертый уровень возбуждения не достаточен для активации актуатора.
Транзисторы адресации снова проводят в течение периода, когда напряжение противоэлектрода переключается, поскольку иначе напряжение на приводном электроде также переключится на напряжение противоэлектрода (поскольку ток не может протекать), и транзистор адресации будет поврежден.
Работа схемы заключается в передаче данных о напряжения на приводной электрод актуатора с электроактивным полимером только, когда затвор выбранного TFT адресован, заставляя TFT стать проводящим. После того как адресация завершена, TFT становится не проводящим, и напряжение поддерживается на устройстве, пока оно или не утечет, или пока устройство не будет адресовано снова. Таким образом, схема работает как схема выборка-сохранение, в соответствии с чем (необязательный) запоминающий конденсатор способствует поддержанию напряжения, приложенного к устройству.
После адресации устройство деформируется к новому состоянию активации в зависимости от возбуждающего напряжения (Vdr), которое присутствует между электродом данных и опорным электродом. Активация может протекать значительно дольше, чем период адресации, который обычно бывает намного меньше чем 1 мс. Различные уровни активации могут быть реализованы подачей различных возбуждающих напряжений.
Как будет ясно из вышеприведенного описания, некоторые конструкции могут использовать пороговое поведение устройства. Актуатор с электроактивным полимером не обязательно имеет пороговое поведение. Некоторые пути создания структуры с требуемой пороговой характеристикой рассматриваются ниже.
Порог может быть создан искусственно, избегая нежелательных эффектов активации до этого порога, используя или механические эффекты, или электрические (возбуждающий сигнал) эффекты, или их комбинации.
Механические пороговые эффекты могут, например, быть осуществлены, используя геометрию, механическую фиксацию, или поверхностную «клейкость». Электрические пороговые эффекты могут, например, быть осуществлены, используя электростатическое притяжение или ситуацию электрического пробоя. Комбинация этих эффектов может также использоваться для эффективного осуществления порога напряжения.
Этот порог может рассматриваться как задержка, при которой физическая активация запаздывает, пока не будет достигнут определенный уровень возбуждения.
На Фиг. 12 показан первый пример, основанный на геометрическом эффекте, используя механическую структуру для осуществления задержки.
Устройство содержит слой 120 электроактивного полимера в пределах камеры 122. Камера имеет крышку 124, подвешенную над слоем 120 электроактивного полимера. Крышка помещена на оправе, что означает ее подвес над слоем ЭАП. Возбуждение слоя электроактивного полимера с первым диапазоном подводимых возбуждающих сигналов поднимает его к крышке. После того, как установлен контакт (при максимальном возбуждающем сигнале в пределах первого диапазона), дальнейшая активация заставляет крышку подниматься, как показано на нижнем изображении. Таким образом, имеется диапазон входных возбуждающих сигналов, которые вызывают перемещение электроактивного полимерного слоя только в пределах промежутка ниже крышки. Когда максимальный возбуждающий сигнал в этом диапазоне достигнут, то установлен контакт. Это соответствует пороговому напряжению всего устройства. Выше этого возбуждающего сигнала дополнительное возбуждение во втором диапазоне обеспечивает прогрессирующий подъем крышки, что соответствует механическому выходу устройства.
Таким образом, частично активируемый элемент не будет перемещать крышку, но полностью активированный актуатор даст смещение, хотя проигрышем является ограниченное полное смещение активируемой поверхности.
Как показано на Фиг. 13, эффект задержки должен понизить кривую смещения так, чтобы не было никакого смещения, пока порог VT не будет достигнут. Это имеет эффект понижения максимального смещения.
Актуатор может обеспечить большее смещение, если он зафиксирован, используя систему удержания, например, систему зажима для создания порогового напряжения для активации. Это пороговое напряжение тогда соответствует необходимой силе для преодоления функции удержания.
На Фиг. 14 показан пример, имеющий удерживающий механизм 140 в форме крюков с зажимом, которые крышка 124 должна пройти перед перемещением. Крюки с зажимом требуют, чтобы пороговая сила была приложена к крышке прежде, чем она может пройти крюки. Показаны соответствующее смещение относительно характеристики напряжения (график 142), а также сила относительно характеристики напряжения (график 144).
После защелкивания зажима актуатор продолжит увеличивать свое смещение с большим прикладываемым напряжением. Когда напряжение удалено, система возвращается к своему начальному плоскому состоянию. Крюки с зажимом могут позволить свободное прохождение в нисходящем направлении крышки, или же устройство может требовать возврата дополнительной приложенной силой.
В дополнительном механическом варианте осуществления пороговое напряжение может быть вызвано добавлением заданной «липкости» между электроактивной полимерной структурой (то есть полимерный слой и его собственная подложка) и опорной структурой. Липкость может быть преодолена только увеличением напряжения на слое электроактивного полимера, пока его сила не преодолеет липкость системы.
Липкость может быть осуществлена посредством
химической модификации поверхностей (применение подобного клею свойства),
введением текучей среды между поверхностями (используя капиллярные силы),
механической/топологической модификацией поверхности, например, подобная «Velcro» структура.
Вышеприведенные примеры используют механизм задержки, основанный на механической структуре, которая, например, задает выход устройства. Альтернатива основана на электростатическом эффекте, как показано на Фиг. 15.
Актуатор имеет дополнительный электрод 150 на поверхности ниже структуры электроактивного полимера. Электростатическое притяжение между одним электродом слоя 120 электроактивного полимера и дополнительным электродом 150 на поверхности создает ограничительную силу, которая ограничивает изгиб.
Если электростатическая сила будет преодолена изгибной силой, то актуатор изогнется. Это значительно уменьшает электростатическую силу, поскольку сила является функцией промежутка между электродами (d) в квадрате. Любой изгиб увеличит d, и электростатическая сила уменьшится, приводя к дополнительному изгибу и, следовательно, большему сокращению F_electrostatic, и порог преодолевается.
График показывает соответствующее смещение относительно характеристики напряжения (график 152), силу относительно характеристики напряжения (график 154), и электростатическая сила относительно характеристики напряжения (график 156).
Преимущество этой системы состоит в том, что электростатическая сила является почти мгновенной, а сила слоя электроактивного полимера имеет медленный отклик, что является благоприятным для сохранения актуатора как жестко зафиксированного при более низких напряжениях. Динамический эффект может быть реализован, эксплуатируя различие емкости между слоем электроактивного полимера и подложкой. В этой конфигурации электростатическая сила будет работать для ограничения устройства ЭАП, как только приложено напряжение. Однако актуатор с электроактивным полимером будет медленно развиваться до своей максимальной силы от этапа ввода напряжения. Это может вызвать задержанный пороговый эффект. Таким образом, на этапе подачи напряжения электростатическая сила сначала удерживает устройство, пока сила активации не преодолеет порог электростатической силы и не возникнет для получения смещения.
Таким образом, пороговое значение частично определяется геометрией актуатора и частично скоростью активации.
Другое возможное осуществление механизма задержки для обеспечения порога содержит электрический компонент, который осуществляет пороговое напряжение или напряжение переключения для управления приложением подводимого возбуждающего сигнала к слою электроактивного полимера.
На Фиг. 16 показан пример, в котором слой 120 электроактивного полимера электрически последовательно соединен с электрическим пороговым или переключающим элементом 160, показанным как DIAC (диодный AC переключатель). Могут быть использованы другие пороговые элементы, такие как диод Шокли, кремниевый управляемый выпрямитель или другой тиристор. Этот элемент может быть частью электроактивной полимерной структуры, например, как органические полупроводниковые слои (в p-n-p-n последовательности) как часть пакета подложек. Альтернативно, для больших актуаторов в решетке элемент может быть поверхностно смонтированным компонентом устройства, последовательно соединенным с каждым актуатором.
Для прикладываемого напряжения ниже переключающего или порогового напряжения нет никакой вынужденной деформации, поскольку падение напряжения возникает на переключающем или пороговом элементе. Для большего приложенного напряжения слой электроактивного полимера будет деформироваться.
Другое возможное осуществление механизма задержки содержит вторую структуру электроактивного полимера, причем вторая структура электроактивного полимера содержит электрод для приема подводимого возбуждающего сигнала на устройство, причем при деформации второй структуры электроактивного полимера на заданную величину, подведенный возбуждающий сигнал связан с (главной) структурой электроактивного полимера.
На Фиг. 17 показан пример. Полное устройство содержит главный актуатор 170 и вспомогательный актуатор 172. Вспомогательный актуатор меньше, чем главный актуатор, и он задает часть управления, которая является не несущим нагрузку устройством.
Использование двух последовательных актуаторов дает возможность осуществить порог. Вспомогательный актуатор действует как механический переключатель, тогда как главный актуатор — это функциональный актуатор. Когда напряжение ниже порогового напряжения, переключатель выключен, как показано, для напряжений V=0 и V=V1 на Фиг. 17A и 17B.
При пороговом напряжении и выше порогового напряжения, например, V=V2, как показано на Фиг. 17C, переключатель включается и функциональный актуатор сразу же полностью запитывается этим напряжением.
Контакт между двумя актуаторами обеспечивает контакт их возбуждающих электродов, та, чтобы вспомогательный актуатор задержал приложение возбуждающего напряжения на главный актуатор.
На Фиг. 18 показана функции смещения для главного актуатора, и можно видеть, что имеется резкий обрыв функции смещения.
Последовательное упорядочение может быть выполнено несколькими различными путями с различными конфигурациями актуатора и конфигурациями актуатора переключения. Контакт может быть установлен электродом структуры электроактивного полимера или дополнительной контактной площадкой, сделанной на задней стороне подложки, в зависимости от геометрии актуатора.
Как упомянуто выше, другой вариант осуществления функции задержки заключается в введении свойства липкости.
На Фиг. 19 показано воплощение, в котором расширение слоя 120 электроактивного полимера ограничено плоскостью.
Эта конструкция может быть основана на свободно установленном устройстве (как на Фиг. 1). Например, два слоя могут быть установлены на одной стороне, и в другом случае могут быть свободными, для расширения во всех направлениях.
Слой предусмотрен вплотную к подложке 192 и имеется фрикционное сопротивление между ними, которое препятствует относительному скользящему движению, пока фрикционная сила не будет преодолена.
Таким образом, трение действует как механизм задержки и определяет порог.
Для приведения в действие устройства так, чтобы преодолеть трение, может быть использована схема управления переменным током. Например, контроллер 194 используется для подачи высокочастотного волнового сигнала переменного тока, добавляемого к возбуждающему сигналу постоянного тока для получения возможности относительного скольжения, когда актуатор движется от одного положения до следующего положения. Следующее положение может быть также поддержано удалением приложенного напряжения вследствие трения, так, чтобы был получен бистабильный эффект.
Как показано на временном профиле напряжения на Фиг. 19, приведение в действие устройства начинается с напряжения переменного тока и только с малым смещением постоянного тока. Электроактивные полимеры активируются симметрично для положительных и отрицательных напряжений, так что возникают колебания относительно не активированного состояния. Это приведет к снижению трения и подготовит слой электроактивного полимера к плавному движению активации, которое возникает, как только возбуждающее напряжение увеличивается.
Слой электроактивного полимера тогда продолжает деформироваться в течение следующего периода времени, изображенного на графике, где есть активные колебания в течение деформации (вызванные компонентом переменного тока, добавленным на повышающийся уровень напряжения постоянного тока).
Наконец, после короткого периода, когда сигнал переменного тока накладывается на практически постоянный уровень постоянного тока, чтобы сделать возможной какую-либо задержку движения слоя электроактивного полимера при достижении его конечного состояния, напряжение удаляется, что, если остаточное трение достаточно, приведет ко второму сохраняемому стационарному состоянию. Впоследствии устройство может быть восстановлено подачей только малого сигнала переменного тока для преодоления трения и возвращения устройства назад к его исходному состоянию. Следовательно, устройство имеет множественные произвольные устойчивые состояния с возможностью восстановления. В этом варианте реализации, может быть преимущественным уменьшать амплитуду сигнала переменного тока медленно для представления возможности устройству перейти в его самое устойчивое (наибольшее трение) состояние.
Описанные выше различные примеры по существу предусматривают устройство актуатора, которое имеет пороговую функцию.
Рассмотренные выше схемы основаны на использовании транзисторов. Хотя свойства MOSFET аморфных кремниевых TFT позволяют приведение устройств в действие как высокими напряжениями, так и низкими напряжениями при том же самом переключении TFT, имеются и другие активные элементы с меньшей стоимостью — это диоды, где дело обстоит не так.
В принципе, можно обращаться к устройству ЭАП через последовательность диодов в точке пересечения строк и столбцов. Однако, поскольку диод проводит только в одном направлении, сокращение состояния активации каждого устройства зависит от функции саморазрядки устройства ЭАП. Это может привести к нежелательной длительной работе пикселей матрицы.
На Фиг. 20 показан переключающий узел, который использует диоды. Первый диод 200 находится между первой линией 202 адресации и первым выводом актуатора 36 с электроактивным полимером, а второй диод 204 — между первым выводом актуатора с электроактивным полимером и второй линией 206 адресации. Диоды, таким образом, включены последовательно между двумя линиями 202, 206 адресации с той же самой полярностью. Второй вывод актуатора с электроактивным полимером соединен с линией 208 выбора. Первая и вторая линии адресации содержат проводники столбцов, и линия выбора содержит проводник строк.
Таким образом, имеется первый диод между первой линией адресации и первым выводом актуатора с электроактивным полимером и второй диод между первым выводом актуатора с электроактивным полимером и второй линией адресации, причем второй вывод актуатора с электроактивным полимером соединен с линией выбора. Это устройство использует два диода; один для адресации и другой для де-адресации.
Первый диод 200 — это диод адресации для зарядки актуатора с электроактивным полимером от первой линии адресации, и второй диод 204 — это диод де-адресации для разрядки актуатора с электроактивным полимером на вторую линию адресации (то есть приводит его к меньшим напряжениям).
Для ограничения времени работы, как может требоваться в зависимости от требований приложений, эта схема предоставляет активную деактивацию или де-адресацию актуатора с электроактивным полимером. Это позволяет быструю разрядку актуатора с электроактивным полимером (и если имеется, то его сохраняющий конденсатор).
Схема адресации расширена соответствующей схемой де-адресации, как объяснено в связи с Фиг. 21, на которой показана 4×4 матрица.
В каждой точке пересечения предусмотрена схема с Фиг. 20. Теперь имеется два проводника 202, 206 столбцов для каждого столбца актуаторов, так что имеется 2m столбцов и n строк.
В течение каждого цикла строки адресуются в свою очередь. Когда одна строка адресуется, актуаторы с электроактивным полимером в строке или адресуются, или активно де-адресуются.
На Фиг. 21 показаны две части цикла адресации, в котором выбрана первая строка.
На Фиг. 21A показаны все актуаторы с электроактивным полимером в первой активируемой строке.
В течение адресации вторые проводники 206 столбцов поддерживаются на высоком уровне (Vh), так чтобы актуаторы не могли разрядиться. Первые проводники 202 столбцов из выбранных столбцов также переведены на высокий уровень (Vh) для зарядки актуаторов с электроактивным полимером в этих столбцах. В примере на Фиг. 21A все четыре актуатора адресованы.
В течение де-адресации, как показано на Фиг. 21B, первые столбцы 202 данных поддерживаются на низком уровне (Vl), так чтобы в комбинации с напряжением линии адресации первый диод 200 был непроводящим. Вторые диоды 204 из выбранных столбцов проводят в результате низкого напряжения разрядки (Vd), приложенного к выбранным вторым проводникам 206 столбцов. Другие вторые проводники столбцов имеют высокое приложенное напряжение (Vh), так, чтобы диоды 204 не проводили.
Проводник строк для выбранной строки имеет приложенное напряжение (Vsel) выбора, и все другие строки имеют приложенное напряжение (Vns) без выбора. Как будет объяснено ниже, другое напряжение без выбора используется в течение стадий зарядки и разрядки. Только если строка де-адресации активизирована И соответствующий второй столбец 206 данных переключается на напряжение деактивации (Vd), актуатор в точке пересечения будет деактивирован (разряжен). Одного только низкого напряжения Vd не достаточно для прямого смещения диода 204, когда низкое напряжение Vns без выбора приложено к проводнику строк.
Операции адресации и де-адресации последовательны. Они не могут осуществляться в одно и то же время, поскольку это привело бы к короткому замыканию между проводниками двух столбцов.
В качестве примера, для напряжения активации 200 В, возможны следующие уровни напряжения: Vh=100 В, Vl=-100 В, Vd=-100 В и Vns=+100 В или -100 В в зависимости от стадии последовательности управления.
Одна возможная последовательность управления:
1. Зарядка
Линия 208 адресации для адресуемой строки приводится к Vsel =-100 В
Линии 202 данных приводятся к Vh=100 В, и линии 206 данных приводятся к Vh=100 В. Актуаторы в строке заряжаются до 200 В. Линии адресации для невыбранных строк находятся при Vns=100 В.
2. Разрядка
Линии 208 адресации для невыбранных строк приводятся к Vns=-100 В.
Линии 202 данных приводятся к Vl=-100 В. Таким образом, все диоды 200 являются непроводящими или с 0 В на них, или с обратным смещением 200 В.
Линии 206 данных для разряжаемых актуаторов приводятся к Vd=-100 В. Актуаторы в этих строках затем разряжаются через диоды 204. Ни один из других актуаторов не затрагивается.
На Фиг. 22 показан другой пример, в котором переключающий узел содержит MIM (металл-изолятор-металл) диод 220 последовательно с актуатором 36 с электроактивным полимером между единственным проводником 32 столбцов и проводником 30 строк. Диод MIM имеет диодные характеристики в обоих направлениях проводимости с диапазоном блокирования при более низких напряжениях.
На Фиг. 23 показан другой пример переключающего узла, который содержит последовательные первый и второй транзисторы 230, 232 между линией 234 данных и первым выводом актуатора 36 с электроактивным полимером, причем первый транзистор 230 переключается первой линией 32 адресации столбцов, и второй транзистор переключается второй ортогональной линией 30 адресации строк. Второй вывод актуатора 36 с электроактивным полимером соединяется с опорным потенциалом Vref. Запоминающий конденсатор 38 опять же показан как параллельный с актуатором с электроактивным полимером. Переключающий узел, таким образом, содержит последовательные первый и второй транзисторы между линией данных и первым выводом актуатора с электроактивным полимером. Использование двух транзисторов позволяет осуществить схему автоматической регенерации. Это позволяет поддерживать состояние активации без переадресации матрицы с данными.
Узел драйвера используется для подачи первого и второго уровней возбуждения на первую и вторую линии адресации, и для подачи данных на линию данных.
Для адресации актуатора с электроактивным полимером к обоим транзисторам необходимо адресоваться одновременно. Такая схема допускает автоматическую схему регенерации как, например, осуществлено в устройствах оперативной памяти (RAM).
Во всех вышеприведенных примерах драйвер может подавать сигнал данных в форме сигнала двух уровней (0 В и Vdr). Это позволяет иметь наименьшую стоимость ИС драйвера, как упомянуто выше. Однако в альтернативных вариантах реализации может быть предпочтительным также частично активировать актуаторы. Для получения такой возможности может быть использован драйвер данных с множественными данными щ напряжении вплоть до Vdr, или в другом случае может быть использована схема управления PWM.
Во всех этих схемах активной матричной адресации может быть желательной адресация к нескольким строкам актуаторов с электроактивным полимером одновременно, в соответствии с чем, адресация будет проходить еще быстрее. Это достигается подачей напряжения адресации более чем на одну строку актуаторов с электроактивным полимером в одно и то же время.
Как также упомянуто выше, может оказаться предпочтительным инвертировать полярность напряжения на актуаторах с электроактивным полимером с равными временными интервалами, в соответствии с чем рабочие параметры устройства будут ухудшаться меньше, чем если бы инверсия не использовалась. Это может быть достигнуто, например, изменением напряжения на опорном электроде в дополнительном цикле адресации и соответственной адаптацией возбуждающих напряжений.
Электродный узел может содержать электроды на противоположных сторонах слоя электроактивного полимера, как показано выше, для возбуждаемого полем устройства. Они обеспечивают поперечное электрическое поле для управления толщиной слоя ЭАП. Это в свою очередь вызывает расширение или сжатие слоя ЭАП в плоскости слоя.
Электродный узел может вместо этого содержать пару гребенчатых электродов на одной стороне слоя электроактивного полимера. Это обеспечивает электрическое поле в плоскости для непосредственного управления размерами слоя в плоскости.
Материалы, подходящие для слоя ЭАП, известны. Электроактивные полимеры включают в себя, но без ограничения, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные сегнетоэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, композиты ионный полимер-металл, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но без ограничения:
Поливинилиденфторид (PVDF), Поливинилиденфторид-трифторэтилен (PVDF-TrFE), Поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), Поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), Поливинилиденфторид-гексафторэтилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но без ограничения:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли (p-фенилен сульфид), полианилины.
Дополнительные пассивные слои могут быть предусмотрены для влияния на характеристики слоя ЭАП в ответ на приложенное электрическое поле.
Слой ЭАП может быть расположен между электродами. Электроды могут быть растяжимыми, так чтобы они следовали за деформацией слоя материала ЭАП. Материалы, подходящие для электродов, также известны и могут, например, быть выбраны из группы, состоящей из тонких металлических пленок, например, золота, меди, или алюминиевых или органических проводников, например, газовой сажи, углеродных нанотрубок, графена, полианилина (PANI), поли(3,4-этилендиокситиофена) (PEDOT), например, поли(3,4-этилендиокситиофена) поли(стиролсульфоната) (PEDOT:PSS). Металлизированные пленки полиэстера также могут быть использованы, например, металлизированный терефталат полиэтилена (PET), например, с использованием алюминиевого покрытия.
Материалы для различных слоев выбираются, например, с учетом упругих модулей (модули Юнга) различных слоев.
Для адаптации электрических или механических характеристик устройства могут быть использованы слои, дополнительные к рассмотренным выше, например, дополнительные полимерные слои.
Устройства ЭАП могут быть устройствами, приводимыми в действие электрическим полем или ионными устройствами. Ионные устройства могут быть основанными на композитах ионный полимер-металл (IPMC) или сопряженными полимерами. Композит ионный полимер-металл (IPMC) — это синтетический композитный наноматериал, который отображает поведение искусственной мышцы под приложенным напряжением или электрическим полем.
IPMC составлены из ионного полимера, такого как Nafion или Flemion, поверхности которого покрыты химическим методом или физически покрыты проводниками, например, платиной или золотом, или электродами на основе углерода. Под приложенным напряжением, миграция и перераспределение ионов вследствие приложенного напряжения к полосе IPMC приводят к изгибной деформации. Полимер — это набухающая при растворении ионообменная полимерная мембрана. Поле обуславливает перемещение катионов в сторону катода вместе с водой. Это приводит к перестройке гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остатке полимерной матрицы, приводя к изгибу к аноду. Изменение приложенного напряжения на обратное инвертирует изгиб.
Если металлизированные электроды размещены в несимметричной конфигурации, наложенное напряжение может вызвать все виды деформаций, такие как скручивание, вращение, кручение, поворот, и несимметричная изгибная деформация.
Устройство может быть использовано в качестве единичного актуаторв, или, в другом случае, может быть линия или решетка устройств, например, для предоставления управления 2D или 3D контуром.
Изобретение может быть применено во многих приложениях ЭАП, включая примеры, когда представляет интерес пассивная матричная решетка актуаторов.
Во многих приложениях главная функция продукта связана с (локальной) манипуляцией человеческой ткани или активацией границ раздела, входящих в контакт с тканями. В таких приложениях ЭАП актуаторы предоставляют уникальные преимущества, главным образом, вследствие малого форм-фактора, гибкости и высокой плотности энергии. Следовательно, ЭАП может быть легко интегрирован в программном обеспечении, 3D-форме и/или в миниатюрных продуктах и интерфейсах. Примеры таких приложений, это:
Косметические обработки кожи, например, устройства активации кожи в форме кожных пластырей на основе ЭАП, которые используют постоянное или циклическое растяжение кожи для увеличения натяжения кожи или уменьшения морщин;
Дыхательные устройства с переходной маской пациента, которая имеет активную подушку или уплотнение на основе ЭАП для предоставления переменного нормального давления для кожи, что уменьшает или предотвращает лицевые красные метки;
Электрические бритвы с адаптивной головкой для бритья. Высота поверхностей, входящих в контакт с кожей, может быть откорректирована с использованием актуаторов ЭАП, влияя на баланс между близостью и раздражением;
Устройства ротовой очистки, такие как воздушный флосс с динамическим распылительным актуатором для улучшения досягаемости распыления, особенно в пространстве между зубами. Альтернативно, зубные щетки могут быть снабжены активируемыми ворсинами;
Устройства бытовой электроники или сенсорные экраны, которые предоставляют локальную тактильную обратную связь через решетку преобразователей ЭАП, которая интегрирована в пользовательский интерфейс или находится вблизи пользовательского интерфейса;
Катетеры с управляемым наконечником для предоставления возможности простой навигации в извилистых кровеносных сосудах.
Другая категория соответствующего применения, которая имеет преимущество от использования актуаторов ЭАП, относится к модификации света. Оптические элементы, такие как линзы, отражательные поверхности, дифракционные решетки и т.д., могут быть сделаны адаптивными посредством адаптации формы или положения, используя актуаторы ЭАП. Здесь преимущество актуаторов ЭАП заключается, например, в меньшей потребляемой мощности.
Другие вариации раскрытых вариантов реализации могут быть поняты и произведены специалистами в данной области техники при осуществлении заявленного изобретения из изучения чертежей, раскрытия и приложенной формулы. В формуле, выражение «содержащий» не исключает других элементов или этапов, и выражение в единственном числе не исключает множества. Тот факт, что определенные положения приведены во взаимно различающихся зависимых пунктах формулы, не означает, что комбинация этих положений не может быть использована для получения преимуществ. Никакие ссылочные обозначения в пунктах формулы не должны рассматриваться как ограничение объема притязаний изобретения.
Как устроен актуатор центрального замка?
Автомобильный центральный замок работает по следующему принципу: когда вы поворачиваете ключ, срабатывают контакты управления, подающие команду на электронный блок управления всем замком, который далее передаёт её устройствам, которые манипулируют замками дверей, багажника, люка и даже крышки топливного бака. При попадании автомобиля в дорожно-транспортное происшествие и срабатывании подушек безопасности, все двери автоматически отпираются.
Несложно догадаться, что конструкция центрального замка достаточно проста, и его составными частями являются блок управления и исполнительные устройства – актуаторы (или, как их ещё называют, активаторы). При решении приобретения центрального замка с дистанционным способом управления, лучше доверить его монтаж профессионалам своего дела. В данном случае у вас будет гарантия, что всё работает корректно, и система исправна. Но что, если случились какие-то проблемы, например, с актуаторами, и приходится проводить ремонт или замену своими руками? Об этом мы и поговорим далее в этой статье.
Что такое актуатор центрального замка?
Данные устройства крайне просты. Их основу составляет маленький электродвигатель, который соединён с подвижным штоком по принципу реечной передачи, а к нему уже крепится тяга от механического замка. Когда происходит подача напряжения на один из проводов, питающих электродвигатель, вал мотора начинает вращаться в нужную сторону, при этом вращая шток. Вместе со штоком сдвигается и тяга, прикреплённая другим концом к рычагу автомобильного механического замка. Как следствие, происходит один из двух вариантов: освобождение замков или их блокировка.
Шток ходит на очень короткие промежутки, поэтому электродвигатель быстро заклинивается. Чтобы в такие моменты не произошло перегорание моторчика, на актуатор нельзя подавать напряжение в продолжительный период времени. Поэтому, когда двери запираются или отпираются, блок управления центральным замком подаёт напряжение на актуаторы всего на несколько секунд, а потом автоматически отключает их. Такие периоды достаточно разные по времени, но в среднем это две секунды. Этого достаточно для срабатывания приводов, но за это время обмотка электродвигателя каждого из них не перегорит.
Чтобы произошло срабатывание актуатора, недостаточно подать напряжение на один провод, на втором должна быть в этот момент масса. Электроприводы центрального автомобильного замка не имеют чётко установленных плюсового и массового проводов, они меняются в зависимости от задачи, которую должен выполнить привод: отпереть или запереть замок. Этим распределением также занимается блок центрального замка. Его электронные компоненты соединяют цепи питания приводов таким образом, что на один провод подается напряжение, а на другом появляется «масса», то есть соединение с кузовом.
От того, на какой провод электропривода придет напряжение, зависит, в какую сторону будет вращаться вал его двигателя. За счет подачи тока на разные провода вал крутится в разные стороны, выдвигая или втягивая шток и, соответственно, запирая или отпирая замок двери автомобиля.
Замена актуатора центрального замка
Для автомобилистов, привыкших заниматься самостоятельным ремонтом автомобилей, замена актуатора центрального замка никаких трудностей не вызовет. Но для этого сначала нужно снять всю дверную обшивку, а если на ней есть ещё и разного рода кнопки, например, те, которые управляют стеклоподъёмниками, тогда понадобится отключить и их разъёмы. Следовательно, перед проведением ремонта нужно снять минусовую клемму с батареи аккумулятора. Если же кнопок нет, ток аккумулятор можно и не трогать.
Теперь перейдём непосредственно к последовательности выполнения ремонтных работ. Первым делом, в соответствии с мануалом, который прилагается к вашему автомобилю, нужно снять дверную обшивку. Как мы уже сказали, при наличии кнопочного блока, отключите все разъёмы. На многих автомобилях можно добраться до актуатора центрального замка сразу, только сняв обшивку. Но если устройство вашей машины сложнее, тогда нужно будет снять ещё и те детали, которые мешают доступу к необходимому элементу. Помните, что все действия нужно проводить без спешки и максимально аккуратно. Как правило, весь узел электропривода замка фиксируется парой саморезов, которые и нужно выкрутить.
Актуаторы центральных замков обычно очень долговечны, но если вдруг случается так, что замок либо не закрывается, либо не открывается, значит, проблема именно в активаторе. Когда доберётесь до детали центрального замка, нужно отсоединить старый электромотор и поставить на его место новый. Сборку двери проводите в обратном порядке.
Неисправности актуатора центрального замка
1. Перегорают все актуаторы: причиной является длинный импульс управления, или, при неисправности генератора, на актуаторы подалось повышенное напряжение.
2. Заклинило актуаторы в одном положении с расплавлением коллекторных узлов.
3. Замкнуло силовые провода управления актуаторами. Произошло замыкание на массу силовой цепи.
4. Замкнуло внутри актуатора. Причиной выступает повреждённая изоляция силового провода или замыкание коллекторных пластин внутри активатора.
5. Сгорел при открытии предохранитель. Силовые провода управления актуаторами замкнуло. Произошло замыкание на массу силовой цепи.
6. Шумная работа актуатора. Причина кроется в износе механизма шестерен, что произошло в результате неправильной установки.
7. Из-за неправильной установки актуатора дёргается центральный замок.
Подписывайтесь на наши ленты в таких социальных сетях как, Facebook, Вконтакте, Instagram, Pinterest, Yandex Zen, Twitter и Telegram: все самые интересные автомобильные события собранные в одном месте.
типов приводов | Линейные, электрические, магнитные, пневматические, поворотные, гидравлические
Независимо от того, являетесь ли вы специалистом по машинам или кем-то, кто все еще изучает детали моторных устройств, вы, скорее всего, знаете о приводе и его значении.
Приводыслужат для управления движениями внутри машин. Однако существуют различные типы приводов, которые производят различные движения и используют разные источники энергии. Выявление различий между этими устройствами управления движением поможет вам устранять неполадки в деталях или совершенствовать процессы в вашем станке.
Давайте рассмотрим различные типы приводов и их функции, а также дадим несколько советов, как поддерживать их работу с максимальной производительностью.
Что такое привод?
Привод — это часть машины, которая инициирует движения, получая обратную связь от управляющего сигнала. Когда на него подается питание, привод создает определенные движения в зависимости от назначения машины.
Какие бывают устройства с приводами?
Машины и системы имеют приводы с момента их популяризации во время Второй мировой войны.Наиболее известные примеры приводов:
- Электродвигатели: Любая часть оборудования или прибора, которая преобразует электрическую энергию в движение, например, те, которые используются в вентиляционных вентиляторах, смесителях или холодильниках, содержит по крайней мере один привод. В электромобилях также используются приводы.
- Шаговые двигатели: Эти приводы известны тем, что они принимают цифровые импульсы и преобразуют их в механическое движение. Шаговые двигатели часто встречаются в роботах, интеллектуальных инструментах или автоматизированном режущем оборудовании.
- Гидравлические цилиндры: Это устройства поступательного движения, которые работают с помощью трубки, поршня и штока. Многие транспортные средства, например бульдозеры, экскаваторы или экскаваторы, работают с использованием гидравлического привода.
Какие бывают типы приводов?
Приводыможно классифицировать по движению, которое они производят, и используемому источнику питания.
Движение
Приводымогут создавать два основных типа движения: линейное и вращательное.
Линейные приводы
Судя по названию, линейные приводы — это устройства, которые перемещаются по прямой траектории.Они могут быть механическими или электрическими и чаще всего встречаются в гидравлических или пневматических устройствах. Любая машина, оборудование или гаджет, требующие некоторой формы прямого движения, обычно имеют линейный привод.
В простом линейном приводе есть гайка, крышка и скользящая трубка. Скользящая труба обеспечивает пространство для движения, в то время как гайка и крышка обеспечивают движение блокировки, которое удерживает привод на прямом пути. Другие сложные линейные приводы будут иметь дополнительные детали, но упомянутая выше система является основой для прямого движения.
Поворотные приводы
В отличие от линейных приводов поворотные приводы создают круговое движение. От термина «вращающийся» большинство машин используют эти вращающиеся части для выполнения вращательного движения. Они часто используются в сочетании с линейным приводом, если машина требует движения вперед, назад, вверх или вниз.
Многие поворотные приводы имеют электрический привод, но некоторые приводятся в действие с помощью гидравлической или пневматической системы. Поворотные приводы можно найти в дворниках, электрических вентиляторах или производственных машинах, которые транспортируют товары из одной области в другую.
Источник энергии
Чтобы различать разные типы приводов, мы также можем отсортировать их по источнику питания или системе, которую они используют для перемещения. Ниже приведены наиболее распространенные приводы в зависимости от источника энергии:
Гидравлические приводы
Гидравлические приводы работают за счет использования заполненного жидкостью цилиндра с поршнем, подвешенным в центре. Обычно гидравлические приводы производят линейные движения, и пружина прикреплена к одному концу как часть возвратного движения.Эти приводы широко используются в оборудовании для упражнений, таком как степперы или автомобильные транспортные средства.
Пневматические приводы
Пневматические приводы — один из самых надежных вариантов движения машины. Они используют сжатые газы для создания механического движения. Многие компании предпочитают приводы с пневматическим приводом, потому что они могут совершать очень точные движения, особенно при запуске и остановке машины.
Примеры оборудования, в котором используются пневматические приводы:
- Автобусные тормоза
- Тренажеры
- Лопастные двигатели
- Датчики давления
- Пневматические почтовые системы
Электроприводы
Электроприводам, как вы уже догадались, для работы требуется электричество.Хорошо известные примеры включают электромобили, производственное оборудование и робототехническое оборудование. Подобно пневматическим приводам, они также создают точное движение, поскольку поток электроэнергии постоянен.
Различные типы электрических приводов включают:
- Электромеханические приводы: Эти приводы преобразуют электрические сигналы во вращательные или линейные движения и даже могут сочетать и то, и другое.
- Электрогидравлические приводы: Приводы этого типа также имеют электрическое питание, но приводят в движение гидроаккумулятор.Затем аккумулятор обеспечивает силу для движения, обычно наблюдаемую в тяжелом промышленном оборудовании.
Термомагнитные приводы
Тепловые и магнитные приводы обычно состоят из сплавов с памятью формы, которые можно нагревать для создания движения. Движение тепловых или магнитных приводов часто происходит из-за эффекта Джоуля, но оно также может происходить, когда катушка находится в статическом магнитном поле. Магнитное поле вызывает постоянное движение, называемое силой Лапласа-Лоренца.Большинство тепловых и магнитных приводов могут производить широкий и мощный диапазон движений, оставаясь при этом легкими.
Механические приводы
Некоторые приводы в основном механические, например, шкивы или реечные системы. Применяется другая механическая сила, такая как тянущая или толкающая, и привод будет использовать это единственное движение для достижения желаемых результатов. Например, поворот одной шестерни на рейке и шестернях может переместить объект из точки A в точку B.Тянущее движение, приложенное к шкиву, может поднять другую сторону вверх или в желаемое место.
Полимерные приводы со сверхспиральной спиралью
Полимерные приводыSupercoiled — относительно новое дополнение к различным типам приводов. Они используются в робототехнике и протезах конечностей, поскольку могут воспроизводить движение мышц человека через катушку, которая сжимается и расширяется при нагревании или охлаждении.
Как выбрать правильный привод
Понимание различных типов приводов — важный шаг в выборе наилучшего варианта для вашего оборудования.Поскольку каждый вид имеет свое уникальное предназначение и требования к энергии, мы рассмотрим факторы, которые помогут вам принять наилучшее решение.
Наличие источника питания
Первое, что вы должны учитывать, — это совместимость вашего источника питания. Если у вас есть промышленный объект с источником электроэнергии, возможно, лучшим выбором — и вариантом с наибольшим выбором — будут электрические приводы. Если в этом районе нет источников электричества или вам нужно полностью функциональное оборудование без электричества, вы можете выбрать пневматический или гидравлический тип.
Необходимое движение
Еще одним важным фактором при выборе привода является диапазон перемещений, необходимый для вашего оборудования. Это линейное, вращательное или объединение того и другого? Приводы, изготовленные на заказ, могут комбинировать или создавать в хронологическом порядке эти движения, чтобы помочь вам конкретизировать конечное оборудование.
точность
Некоторые приводы точнее других. Например, воздушные тормоза создаются с помощью пневматических приводов, потому что известно, что давление воздуха эффективно при запуске и остановке движений.Другие приводы имеют больший диапазон вариаций перемещения, например, приводы с гидравлическим приводом.
Любая отрасль, где требуется высокий уровень точности для безопасности и успешной работы, должна учитывать типы приводов, которые имеют определенные движения.
Безопасность и охрана окружающей среды
Безопасность — еще один фактор, который следует учитывать при выборе привода для вашего оборудования. Электрические или тепловые приводы следует использовать с осторожностью в зонах с экстремальными температурами или опасностями, связанными с током проводимости.Например, использование электрических приводов вблизи водоема без герметизации или других мер безопасности может создать опасность на рабочем месте.
Если ваша компания также стремится к сокращению выбросов углекислого газа, вам необходимо отметить влияние каждого привода на окружающую среду. Как правило, электрические приводы практически не оставляют углеродного следа.
Официальные инструкции
Существуют также специальные инструкции для промышленных приводов в определенных областях. Например, места с высоким содержанием горючих газов должны соответствовать требованиям Национальной ассоциации производителей электрооборудования (NEMA).
Обслуживание привода
Все оборудование требует обслуживания. Техническое обслуживание ваших приводов поможет предотвратить серьезные отключения, опасности или снижение производительности. Вот несколько общих советов, как поддерживать актуаторы в отличной форме.
- Регулярный осмотр : Выполнение регулярных проверок визуального оборудования позволит выявить ранние признаки проблем с приводом. Для проверки на предмет износа необходим зоркий механик.
- Пополнить и заменить: Гидравлические приводы иногда нуждаются в доливке жидкости в цилиндр.Всегда дважды проверяйте наличие утечек и признаков низкого уровня гидравлической жидкости. Замените ослабленные или поврежденные гайки, болты, катушки или винты в деталях привода.
- Измерение рабочих характеристик : В некоторых случаях приводы не обнаруживают внешних признаков проблемы, но вы можете отслеживать проблемы по характеристикам. Автоматизированные графики и вычисление выходных данных могут потребоваться, если вы хотите выявить более глубокие проблемы.
Нужен привод? Мы можем помочь
Если вы уже приняли решение и нуждаетесь в исполнительном механизме, или еще не определились и нуждаетесь в дополнительной информации о различных типах исполнительных механизмов, наша команда всегда готова вам помочь.Creative Motion Control является домом для опытной группы инженеров, исследователей и технических специалистов, стремящихся предоставить лучшие приводы на рынке. Свяжитесь с нами сегодня по телефону (425) 800-8045, чтобы обсудить ваши потребности или запросить ценовое предложение.
примеров приводов и принцип их работы | FIRGELLI
Часть 1: Что такое привод?
Экспертыпрогнозируют, что к 2024 году маркетинг приводов и клапанов будет стоить более 120 миллиардов долларов. Многим это трудно понять, но приводы существуют в большем количестве мест, чем вы думаете.
Электроприводы становятся все более распространенным явлением во всем мире: от автомобилей до оборудования и ремонта дома. Это наиболее верно для развивающихся стран, переживающих промышленную революцию.
Чтобы ответить на вопрос «Что такое исполнительный механизм?», Мы рассмотрим некоторые примеры исполнительных механизмов и то, как они работают. Читайте дальше, чтобы узнать больше.
Приведение в действие механизмов — это преобразование движения в энергию. Это происходит разными способами, например с помощью двигателя, гидроцилиндра или электрического привода.
Эти устройства получают некоторый внешний ввод и преобразуют их в движение. Они делают это, используя накопленную энергию в разных хранилищах.
Электроприводы
Электроприводы получают энергию от электродвигателя, приводящего устройство в действие. Электродвигатель вращает электрический привод, который преобразует накопленную энергию в движение. Этот процесс обратим, а это означает, что накопленную энергию можно преобразовать обратно в электричество и использовать для питания лампочки.
Преимущества электрических приводовЭлектрические приводы более гибкие, чем их пневматические или гидравлические аналоги, и имеют много преимуществ.Их можно использовать в экстремальных условиях, в широком диапазоне температур и в более широком диапазоне напряжений.
Они также более долговечны, чем их более примитивные аналоги. Во многом это связано с тем, что они могут предложить управление движением и точность позиционирования.
Им не нужны насосы высокого давления и громоздкие воздушные сети. Однако у этой гибкости есть обратная сторона.
По размеру и весу эти устройства часто больше, чем их аналоги. Это затрудняет их установку на месте.
Случаи примененияЧаще всего используются в различных промышленных условиях. Одним из таких примеров является аэрокосмическая промышленность. В аэрокосмической промышленности электрические приводы являются основным средством управления поверхностями управления полетом.
Электрические приводы, использующие спиральную стальную пружину, также могут выполнять приложения по удержанию нагрузки. Использование электрического привода в этих приложениях очень распространено, поскольку отсутствие движущихся частей делает их надежным решением.
Электроприводы также обычно используются для синхронизации трехфазных электродвигателей, приводящих в движение роторы ряда распространенных вертолетов.Эти электродвигатели используются для привода двух или более роторов, которые механически соединены друг с другом.
Работа распределяется поровну между всеми роторами, при этом электрические приводы управляют направлением и скоростью каждого ротора. Это позволяет точно контролировать рыскание, тангаж и крен.
Электроприводы также используются в электронной промышленности, в частности в портативных компьютерах. Они также часто используются в коммерческих транспортных средствах и других приложениях, связанных с грузовиками большой грузоподъемности.Электрические приводы обеспечивают дополнительное удобство в медицинском оборудовании, телекоммуникационном оборудовании и автомобильных двигателях.
Пневматические приводы
Это тип привода, который использует сжатый газ для приведения в действие поршней. Они получают энергию из источников сжатого газа, таких как воздух и азот. Этот источник питания широко доступен и обслуживается по сравнению с гидравлическими системами.
Преимущества пневматических приводовПневматические приводы могут выполнять широкий диапазон перемещений, от промышленных до медицинских, и они предпочтительны, потому что механические части легко заменяются.Они популярны благодаря своим возможностям изменения и контроля.
Пневматические приводытакже хвалят за их компактную и легкую конструкцию. Это дает больше возможностей для установки на рабочем месте.
Случаи примененияПневматические приводы также популярны в медицинской промышленности. Они помогают при вентиляции легких или позиционировании пациентов. Они используются для подачи кислорода, удаления углекислого газа и управления потоком воздуха или жидкости.
Пневматические приводы используются в фармацевтической промышленности для обеспечения высокого давления воздушного потока в небольших отсеках.
Пневматические приводы находят применение также в пищевой промышленности. Но они также наиболее часто используются в автомобильной и транспортной отраслях. Здесь они управляют лопастями гребных винтов и аналогичным оборудованием.
Гибридные приводы
Гибридный привод — это комбинация двух или более приводов, обычно механических и электрических, для создания движения. Механический привод обеспечивает движение, а электрический привод обеспечивает питание. Это создает больше функциональных возможностей и гарантирует, что устройство не сломается.
Преимущества гибридных приводов Гибридные приводысчитаются рентабельными благодаря своей гибкости. Они также просты в установке и обслуживании, поскольку не требуют поршней или двигателей высокого давления. Они могут добраться до мест, недоступных для пневматических или гидравлических приводов из-за простоты установки.
Пневматические приводыПневматические приводы являются наиболее распространенными. Они сочетают в себе движения пневматических и электрических приводов. Пневматические, электрические гибридные устройства могут совершать самые точные движения в различных ситуациях.
Промышленные гибридные пневматические системы могут выполнять различные функции, в том числе позиционировать объект. Чаще всего эти устройства используются при строительстве дома или офиса.
Но они также могут помочь с измерением расстояния или определенным направлением воздушного потока. Например, эти системы используются для направления сжатого воздуха в ряд труб, обеспечивая дополнительную силу для поворота клапана после увеличения давления.
В механизмах используются пневматика и моторы.Эти движения обеспечивают большую гибкость в перемещении деталей.
В результате эти типы гибридов создают преимущества, не имеющие себе равных среди других приводов. Это делает их идеальными для использования в медицине или в электротехнике.
Электропневматические приводыЭлектропневматический гибридный привод — одно из самых распространенных гибридных устройств. Базовая конструкция представляет собой базовую систему с электропневматическим приводом, которая обеспечивает пневматическое движение.
Первая система — это электродвигатель, приводящий в движение точку пересечения.Это точка, в которой два компонента соединяются для движения привода.
Вторая система — это «пневматический клапан запястного типа», приводящий в движение локтевой сустав. Этот пневматический клапан состоит из крутящего момента с электропневматическим приводом. Он также имеет пилотный пневмоцилиндр.
Продольное движение реактивной штанги вызывает вращение пилотного цилиндра. Благодаря соединению с локтевым суставом, он может управлять движением.
Гибридные пневмо-механические приводы широко используются в металлообработке.Их также много в автомобильной, медицинской и аэрокосмической отраслях.
Случаи применения Гибридные приводымогут одновременно выполнять множество задач для нескольких различных приложений. Одним из примеров этого является регулирование яркости и управление светодиодами (светодиоды нуждаются в токе, который зависит от яркости). Другой пример — измерение уровня масла (маслопроводы нуждаются в противодавлении).
Гибридные приводытакже полезны для определения расхода под давлением. Они также используются для регулирования температуры в водонагревателях или воздухонагревателях.
Гидравлические приводы
Гидравлические приводы очень универсальны и могут применяться в самых разных областях. Они приводятся в действие гидравлической жидкостью, которая движется через гидравлическую систему.
Гидравлические приводы работают под давлением жидкости под давлением. Эта жидкость находится во внутреннем резервуаре. Эта камера предотвращает утечку при включении выхода привода.
Жидкость под давлением перемещается к приводу двумя разными способами. Гидравлические шланги создают замкнутый контур между резервуаром и приводом.
Гидравлические клапаны перепускают питание системы от резервуара прямо к приводу. Это приводит к созданию системы разомкнутой цепи.
Когда воздух попадает в гидравлическую трубку, он сжимается и начинает нагреваться. Сжатый воздух вызывает эффект обогрева помещения. Температура актуатора сильно повышается.
Он делает это путем выключения и включения клапана, заставляя его нагреваться и охлаждаться на высокой скорости, перемещаясь по тепловому контуру. В результате возникает вибрация, создающая звук.
Преимущества гидравлических приводовГидравлические приводы могут совершать широкий диапазон движений. Вы можете найти их во многих местах за их возможности настройки и контроля. Они также очень прочные и компактные, требующие меньшего обслуживания, чем пневматические и электрические приводы.
Случаи примененияГидравлические приводы могут выполнять широкий диапазон перемещений. Их часто используют в очень суровых условиях с высоким уровнем вибрации. Гидравлические приводы лучше всего работают в приложениях, где требуется большое усилие, например при открытии дверей и взламывании гаек и болтов.
Часть 2: Типы исполнительных механизмов
Помимо того, как приводы получают свою мощность, есть и другие определяющие факторы. Например, исполнительные механизмы подразделяются на категории по тому, как исполнительные механизмы работают в их механизмах. Эти разные типы генерируют разные движения в зависимости от предполагаемого варианта использования.
Линейные приводы
Линейные приводы предназначены для перемещения объектов по прямой линии. Эти типы приводов имеют один или несколько валов, которые работают на линейном трении.
Таким образом, линейные приводы используют линейное движение для выполнения движений, необходимых для действия. Чаще всего используется для приложений управления движением. Например, они популярны в качестве роботов-манипуляторов и промышленных приложений на производстве.
Преимущества линейных приводовЭтот механизм очень простой, универсальный и надежный. Кроме того, он может быть очень надежным в суровых условиях или в тяжелых рабочих условиях. Он также позволяет в значительной степени контролировать происходящее движение и хорошо работает, когда нужно перемещать очень тяжелые объекты с дополнительной силой, поскольку легче приложить силу в одном направлении, чем в нескольких одновременно.
Случаи примененияЛинейные приводы часто используются в таких приложениях, как роботизированные манипуляторы. Здесь движение вызывает линейный механизм. Они также используются в автоматизированной мойке автомобилей, ремонте автомобильных шин и движущихся частях машин.
Они также отлично подходят для домашних работ. Ознакомьтесь с нашими любимыми сборками, сделанными своими руками с использованием линейных приводов, для некоторых изобретательных идей!
Поворотные приводы
Поворотный привод — это механизм, который перемещает объект по кругу или по спирали. Этот тип механизма работает по принципу кулачкового механизма.Он состоит либо из двигателя, редуктора и винтовой резьбы, либо из двигателя, редуктора и кулачка.
Преимущества поворотных приводовИх способность создавать очень точные движения делает их идеальными для крупномасштабных специализированных проектов. Тем не менее, их сложно спроектировать, поскольку разные модели часто нуждаются в разных типах движения для достижения одной и той же цели. Это может создать узкое место в процессе проектирования и задержать время производства.
Случаи применения Поворотные приводычасто используются в приложениях, требующих высокой точности.Например, они часто используются в медицине, например, в качестве кроватей для пациентов, роботов для хирургических операций и другого высокопроизводительного медицинского оборудования.
Они также используются для управления механизмами, которые перемещают детали, например, рулевым управлением автомобиля или вращающейся головкой комбайна. Полупроводники также используются в различных потребительских товарах, таких как игрушки и гаражные ворота.
Электромагнитные приводы
Электромагнитные приводы перемещают объекты линейным или вращательным движением с помощью соленоидов.В их основе лежат вакуумные, токовые или пневматические механизмы.
Соленоид — это цилиндрическая трубка, внутри которой расположены электромагнитные катушки. Когда электрический ток проходит через катушки, они намагничиваются и создают магнитное поле внутри трубки.
Приложенная сила создает линейное движение вдоль оси металлической трубки. Из-за этого соленоид также становится намагниченным, в зависимости от того, сколько оборотов в минуту он вращается. Соленоиды также могут создавать вращательное движение с присоединенной к ним коробкой передач.
Преимущества соленоидных приводов Соленоиды, в отличие от большинства других типов электрических приводов, надежны и могут создавать различные движения. Это потому, что они сделаны из эффективного материала, который может выдерживать различные напряжения.
Они не потребляют много энергии, поэтому отлично подходят для приложений управления движением, которым требуется небольшое количество энергии. Кроме того, они не занимают много места, а это означает, что вы можете создавать продукты с большей универсальностью.
Эти механизмы очень точны в движении и эффективны, что означает, что они могут выполнять работу на высокой скорости.
Случаи примененияСоленоиды часто используются в бытовых и промышленных приборах, таких как вентиляторы, двигатели и нагревательные элементы. Они также используются для многих других приложений, таких как промышленная робототехника и торговые автоматы. Во многих других приложениях соленоиды используются из-за их долговечности и надежности.
Мембранный привод
Мембранный привод — это тип привода, в котором для перемещения объекта используется гибкая мембрана. Эти приводы могут создавать движения в широком диапазоне направлений с очень небольшим усилием.В результате у них есть много разных приложений.
Некоторые примеры включают закрытие дверей, открытие и закрытие вентиляторов и клапанов. Они также могут создавать инструменты звукового движения.
Мембранный привод перемещает объект, используя принципы пневматического цилиндра. Пневматический цилиндр имеет герметичную камеру, разделенную на отсеки, заполненные сжатым воздухом или жидкостью. Во время движения объекта отсек меняет форму и вытесняет воздух или жидкость в остальную часть камеры.
Степень изменения формы в камере зависит от приложенной к ней силы. Из-за этого привод диафрагмы может создавать движения с очень небольшой силой и перемещать объекты в широком диапазоне направлений.
Преимущества мембранного приводаМембранный привод имеет много преимуществ. Его легко настроить и просто запрограммировать. Он также очень универсален, поскольку может управлять машинами, дверями и многими другими потенциальными приложениями.
Случаи примененияВо многих случаях диафрагменный привод не может перемещать объекты во многих направлениях из-за ограниченного диапазона движения.Есть также ограничения на материалы, используемые в приводах.
Это такие ограничения, как приложенная сила или направление, в котором он может двигаться. Эти ограничения связаны с размером и гибкостью используемых материалов.
Пьезоэлектрические приводы
Пьезоэлектрический привод — это особый тип привода, в котором для создания движений используются принципы кристалла. Каждый пьезоэлектрический материал создает силу в ответ на электрический ток, проходящий через него.Из-за этого пьезоэлектрический материал становится поляризованным и перемещается.
Пьезоэлектрический привод состоит из кристалла с прикрепленными к нему электродами. Когда электрическое поле смешивается с кристаллом, он заряжается отдельно.
Это создает отрицательный заряд на электродах. Затем кристалл прикрепляется к основанию.
Разделение и перераспределение зарядов создают магнитное поле и заставляют кристалл расширяться или сжиматься. Это создает линейное движение по одной оси.Пьезоэлектрические материалы имеют собственные частоты, на которых они колеблются в зависимости от их физических свойств.
Использование кристаллов разных типов и прикрепление электродов позволяет создавать движения в очень малых масштабах.
Преимущества пьезоэлектрических приводовПьезоэлектрические устройства отлично подходят для создания точных движений. Они не занимают много места, поэтому вы можете разместить их в широком ассортименте продукции.
Они также просты в изготовлении. Таким образом, их можно настроить и настроить в продукте быстрее, чем это было возможно в противном случае.
Пьезоэлектрические приводы имеют дорогостоящий производственный процесс и не так долговечны, как другие типы приводов. Они также ограничены уровнями собственных частот, используемых для движения.
Кроме того, пьезоэлементы относятся к тому же семейству, что и кристаллы кварца, они хрупкие и легко ломаются. По этой причине специалисты должны обслуживать их с особой тщательностью и точностью.
Случаи примененияПьезоэлектрические приводы могут применяться в самых разных областях. Они используются в различных технологиях, включая потребительские товары, промышленные и медицинские технологии.Они находятся в:
Соленоид — это разновидность электромагнита. Соленоиды работают с железным сердечником, покрытым изоляционным материалом.
Когда ток проходит через сердечник, он создает магнитное поле и притягивает окружающий материал. Они используются для создания точных движений и создания очень небольших движений с использованием небольшого количества энергии.
Приводы на магнитной левитации
Приводы с магнитной левитацией используют электромагнит для перемещения объекта по магнитной форме.Это создает широкий спектр движений, полезных в таких отраслях, как робототехника и автоматизация машин.
В приводе используются два диска с прикрепленными к ним электромагнитами. Затем диски кладут друг на друга магнитами, обращенными друг к другу. Когда ток проходит через электромагнит, он втягивается в соседний электромагнит.
Когда это происходит, создается противодействующая сила и заставляет диски двигаться. Если через электромагнит проходит больше тока, возникает большая противодействующая сила.
Преимущества приводов левитации Приводы с магнитной левитациейочень надежны и просты в установке. Они также универсальны, потому что могут управлять машинами. Одним из примеров является автоматизированная сборочная линия.
Магнитная левитация возникает во многих приложениях, например, в автомобилестроении, производстве и других отраслях промышленности.
У приводов на магнитной подушке есть некоторые недостатки. Из-за сложности магнитного поля и системы, в которой оно движется, они могут быть уязвимы для любых ошибок, таких как неисправность датчика или другие проблемы.Кроме того, они более дорогие, чем приводы других типов, потому что их сложнее производить.
Случаи применения ПриводыMaglev имеют множество применений. Некоторые приложения включают подъем тяжелых предметов, например автомобилей или поездов. Они также используются для управления большим количеством движений и для движущихся объектов с точностью
.Часть 3: Типы приложений привода
Мы уже выделили некоторые варианты использования приводов выше, но теперь давайте углубимся в основные отрасли и посмотрим, как использовать комбинацию этих различных типов приводов.
Промышленные приводы и системы автоматизации
Промышленные приводы хорошо работают на производстве. Их часто используют на заводах для повышения эффективности процессов. Это очень универсальные приводы.
Они хорошо подходят для электрических, механических приложений и приложений управления движением. Эти приводы также автоматизируют сборочные линии и другие операции для повышения производительности труда.
Бытовая электроника
Другой пример исполнительного механизма в этом пространстве — акселерометр, используемый для управления движением устройства.
Бытовая электроника — личное удовольствие. Тем не менее, эти продукты стали незаменимыми в повседневной жизни, потому что они помогли облегчить нашу жизнь.
Первыми потребительскими устройствами, использующими приводы, являются телевизоры и пульты дистанционного управления. В настоящее время исполнительные механизмы используются во многих других типах бытовой электроники.
Актуатором в потребительской технике является сенсорный экран, созданный для распознавания ввода от прикосновения пользователя к экрану и последующего перемещения по мере необходимости. Например, смартфоны и цифровые камеры имеют приводы, которые помогают контролировать движение и создавать более точные действия
Другой пример исполнительного механизма в этом пространстве — акселерометр, используемый для управления движением устройства.В различных потребительских товарах используются пьезоэлектрические приводы для создания движения, необходимого для правильного использования устройства.
Автомобильная промышленность
Автомобильные приводы управляют движениями, которые происходят в автомобилях. Они также могут управлять другими компонентами внутри автомобиля, такими как автоматические рулевые колеса и регулировка сиденья. Существуют также различные типы приводов, которые используются в транспортных средствах для управления движением колес.
Одним из видов автомобильного привода является пневматический цилиндр.Он прикреплен к поршню, который затем выталкивает воздух под давлением. Это производит мощный толчок, который заставляет объект двигаться быстро или вообще прекращать движение.
Другой тип — цепная передача, состоящая из нескольких шестерен и роликов. С этим типом привода шестерни и ролики преобразуют движение автомобиля в круговое движение. Есть и другие типы автомобильных приводов, которые работают аналогичным образом.
Медицинская техника
Медицинские технологии используются в больницах, которые устанавливают механические порталы для перемещения оборудования и управления движением с помощью пультов дистанционного управления.Например, портальная система может использоваться для перемещения аппарата МРТ нажатием кнопки
.В медицинской промышленности приводы используются для управления механическими системами, такими как хирургические инструменты или манипуляторы. Это позволяет хирургам выполнять более точные движения. В медицинских устройствах также используются электронные приводы для выполнения таких задач, как открытие и закрытие клапанов.
Полупроводники и датчики
Полупроводники используются во многих типах оборудования, включая медицинские технологии, управление энергопотреблением, военные системы, промышленные продукты и персональные компьютеры.Эти продукты полагаются на датчики для сбора информации о работе машины, а затем отправки ее обратно в исполнительный механизм. Привод переменного тока использует полупроводники в качестве датчика для измерения частоты электричества.
Полученные схемы затем передают данные на панель водителя, которая изменяет скорость и направление двигателя, который приводит в движение электродвигатель, чтобы регулировать его температуру. Кроме того, они часто используются в коммерческих продуктах, таких как жесткие диски и модули памяти, входящие в состав компьютеров и другой электроники, которую мы используем каждый день.
Робототехника
Робототехника как область науки находит широкое применение. К ним относятся медицина, производство, безопасность, освоение космоса в исследовательских целях, военные и рекреационные цели.
Приводы в робототехнике помогают контролировать движение и создавать точные действия. Некоторые приложения роботов включают в себя медицинские технологии, такие как хирургические роботы, для выполнения деликатных операций внутри тела.
Военный
Военное применение гибридных приводов включает позиционирование или вращение оружия с использованием электродвигателей для вращения турелей и ракет.Позиционирование оружия требует точности, в отличие от использования пневматических или гидравлических гибридных приводов.
Они могут управляться такими датчиками, как лазеры, инфракрасное излучение, радиолокационные изображения и т. Д. Их также можно направлять в вертикальном направлении с помощью магнитных сил или проводов.
Строительство
Приводы используются в широком спектре строительной техники. Строительное оборудование включает в себя множество инструментов, которые помогают сделать строительство быстрее и эффективнее.
Строительное оборудование также может выполнять различные задачи, такие как земляные работы, профилирование, укладка свай, забивка, подъем и перемещение материалов.Приводы работают со всеми этими машинами для создания эффективного рабочего процесса.
Сельское хозяйство
Исполнительные механизмы находят множество применений в сельском хозяйстве, включая использование роботизированного оборудования, такого как тракторы и датчики для наблюдения за состоянием сельскохозяйственных культур. Эти приложения помогают фермерам лучше управлять своими фермами и повышать качество урожая.
Помимо приводов, в сельскохозяйственной технике часто используются механические средства управления для управления работой. Эти средства контроля помогают подрядчикам или фермерам вносить коррективы в рабочий процесс.
Пищевая промышленность
Приводы можно найти в пищевом оборудовании, таком как блендеры, прессы, слайсеры и терки. Эти приводы помогают управлять различными процессами в пищевой промышленности с помощью сервоприводов и помогают создать безопасную, санитарную среду при производстве пищевых продуктов.
Производство электроники
В производстве электроники используется множество типов приводов, которые создают точные действия, необходимые на сборочных линиях. Некоторые приложения включают использование роботизированных манипуляторов для монтажа печатных плат и других электронных компонентов.
Кроме того, исполнительные механизмы используются для таких функций, как нагрев пластика в процессе производства, а также для других функций, требующих точных перемещений.
Геодезия и геология
Приводыиспользуются в геологии для создания очень точных движений, таких как бурение или использование магнитометра для обнаружения изменений, происходящих в магнитном поле. Они также используются для создания точных движений для различных других приложений.
Гражданская инфраструктура
Многие применения приводов в гражданской инфраструктуре включают использование общественного транспорта, строительство плотин и защиту от землетрясений.Кроме того, они используются для управления движением мостов и подземных магистралей.
Строительство
Приводы используются в широком спектре строительной техники. Эти продукты помогают ускорить и упростить строительство. Различные инструменты также используются для выполнения различных задач, таких как вождение, земляные работы, профилирование, толкание или вытаскивание материалов.
Часть 4: Как выбрать лучший привод
Теперь у вас есть вся эта информация, что дальше? Что ж, есть несколько факторов, которые следует учитывать, и мы перечислили их ниже:
Потребляемая мощность
При выборе типа привода следует рассчитать потребляемую мощность.Это поможет вам определить, достаточно ли мощность двигателя, чтобы работать на полную мощность.
При использовании линейного или поворотного механизма следует учитывать вес, скорость и потребляемую мощность. Было бы лучше рассмотреть любые другие альтернативные решения для точного управления, чтобы лучше удовлетворить ваши потребности.
Пример использования
При выборе типа привода следует также использовать критерии производительности продукта, чтобы оценить его производительность. Например, вам следует сравнить характеристики приводов.
Кроме того, вы должны сравнить их сильные и слабые стороны, как указано выше, а также ваш предполагаемый вариант использования.
Стоимость
Как правило, соленоидные приводы дороже линейных или поворотных механизмов. Это потому, что им нужно больше времени и денег на разработку и производство. Тем не менее, это не всегда относится к потребительским товарам, которые используют их для приложений управления движением.
При выборе привода следует также учитывать стоимость владения.Вы должны сравнить срок службы одного продукта со сроком службы других продуктов. Это поможет вам определить, какой продукт будет дешевле в долгосрочной перспективе.
Также важно сравнить затраты на обслуживание и эксплуатацию. Помимо этого, вы также должны учитывать любые опасности и опасности, связанные с определенным типом. Понимая эти факторы, вы можете принять обоснованное решение.
Если вы знаете, какими характеристиками должен быть ваш привод, но не уверены, какой именно привод вам нужен, или просто хотите знать, какие приводы продает FIRGELLI и которые идеально подходят для вашего применения? Тогда наш виджет привода предоставит вам эти ответы.
Приводыпопулярнее, чем вы думаете
Мы изучили различные типы приводов и рассмотрели наиболее распространенные области применения. Пришло время собраться вместе и сделать полезные продукты.
Например, линейные приводы управляют перемещениями роботов на заводах. Пневматические приводы помогают поднимать тяжелые предметы.
У использования приводов много преимуществ. С ними намного удобнее выполнять задачи, требующие точности или широкого диапазона движений. Но в большинстве случаев ими легче управлять, чем другими механическими компонентами.
Итак, теперь вы профессионально разбираетесь в приводах, пришло время делать покупки в нашем магазине. Свяжитесь с нами сегодня, и мы поможем вам найти актуаторы, которые полностью раскрывают потенциал вашего проекта!
Что такое привод? | Описание пневматических и гидравлических приводов
Привод — это устройство, которое использует форму мощности для преобразования управляющего сигнала в механическое движение. Электроприводы — от электрических дверных замков в автомобилях до элеронов самолетов — повсюду.На промышленных предприятиях приводы используются для управления клапанами, заслонками, гидравлическими муфтами и другими устройствами, используемыми в управлении производственными процессами. Промышленный привод может использовать воздух, гидравлическую жидкость или электричество в качестве движущей силы. Их называют пневматическими, электрогидравлическими или электрическими приводами.
Пневматические приводы
Пневматические приводы могут иметь цилиндрическую, мембранную или поворотную конструкцию. Сжатый воздух воздействует на поршень или лопасть, перемещая его в одном направлении. Противодействующая сила, состоящая из пружины или второго объема сжатого воздуха, применяется к противоположной стороне поршня или лопасти для изменения или сохранения положения.Для промышленного управления пневматический привод требует позиционирующей электроники и пневматической системы КИПиА. Из трех типов приводов у пневматики, как правило, самая низкая начальная цена. Однако эксплуатационные расходы высоки из-за необходимости генерировать чистый, сухой сжатый воздух. Требования к техническому обслуживанию также являются самыми высокими из трех типов приводов.
Вы используете приводы?
и уже знаете, что вам нужно?
У вас есть вопросы?
Отправьте электронное письмо специалисту Beck Engineer здесьГидравлический привод
Электрогидравлические приводы приводят в действие поршень с маслом под давлением.Насос с электроприводом направляет жидкость из резервуара через регулирующий клапан (клапаны) к противоположным сторонам цилиндра. Высокая удельная мощность этой системы обеспечивает высокую тягу и высокие рабочие скорости. Электрогидравлическое оборудование обычно имеет высокую начальную цену. Регулярное обслуживание включает периодическую замену уплотнений, уплотнительных колец и т. Д. Поскольку масло, используемое в гидравлическом оборудовании, может представлять опасность возгорания, этот тип привода может не подходить для некоторых промышленных сред.
В электрических приводах используется электродвигатель и редуктор для создания силы или крутящего момента.Для конструкции электропривода можно использовать самые разные технологии. Двигатели могут использовать питание переменного или постоянного тока, а также асинхронную (с короткозамкнутым ротором) или синхронную конструкцию. Системы зубчатой передачи могут включать, среди прочего, червячную, прямозубую, скотч-вилку. Смазка зубчатых передач может состоять из коробки передач, заполненной маслом, или смазки для тяжелых условий эксплуатации, нанесенной на поверхности шестерен. Часто доступны различные аксессуары для контроля и составления отчетов о состоянии привода и рабочих условиях. На рынке представлен широкий выбор электрических приводов с различными технологиями, ценами, характеристиками и качеством.
Поскольку приводы тесно интегрированы с ведомыми элементами, такими как клапаны и демпферы, их часто называют узлами. Примеры включают клапаны с электроприводом (MOV), пневматические клапаны (AOV) и приводы заслонок. Часто предполагается, что привод идет в комплекте с оборудованием. Примеры включают регулирующий клапан или воздушную заслонку. На практике исполнительные механизмы являются важнейшим звеном между системой управления и конечным элементом. Его производительность может существенно повлиять на многие аспекты работы промышленного предприятия и продукции.Следует позаботиться о том, чтобы выбрать правильную технологию и тип привода.
При выборе исполнительного механизма он должен иметь рабочие характеристики, которые позволят системе управления работать так, как было задумано.
Основные рабочие характеристики привода следующие:
- Точное и повторяемое позиционирование обычно лучше 0,15% диапазона.
- Возможность мгновенного пуска и останова без простоев или превышения положения.
- Режим продолжительной работы без ограничения количества пусков в минуту.
- Работает стабильно и не зависит от нагрузки.
- Прочная промышленная конструкция, способная работать в сложных условиях без снижения производительности.
- Требуется минимальное периодическое обслуживание.
Привод, разработанный с такими характеристиками, дает два чрезвычайно важных преимущества:
- Возможность точно и мгновенно отслеживать сигнал запроса от контроллера.Это гарантирует, что привод будет точно реагировать на команды контроллера. Таким образом, исполнительный механизм не является ограничивающим фактором в контуре управления, и контроллер может работать на оптимальном уровне.
- Высокая надежность, не требующая обслуживания. Привод, предназначенный для работы, как описано выше, по умолчанию более прочен, чем типичные приводы. Таким образом, по конструкции он обладает гораздо более высокой степенью надежности.
Электрические приводы Beck обеспечивают необходимый контроль и надежность, которые требуются для многих применений заслонок.Линейка приводов Группы 11 часто используется в системах с низким и средним крутящим моментом (от 20 фунт-футов до 5200 фунт-футов). Приводы группы 22 используются для приложений с высоким крутящим моментом (от 3000 до 8000 фунт-футов), а компактные поворотные приводы группы 31 используются для приложений с низким крутящим моментом (от 15 до 30 фунт-футов).
Что такое привод? Обзор типов приводов, атрибутов, приложений и ведущих поставщиков
В этом руководстве по приводам мы предоставим подробные объяснения различных типов приводов, их применения и использования в промышленности, соображения при их выборе, а также основных поставщиков и производителей. , и дистрибьюторов для поиска правильного привода для вашего проекта.
Содержание
Высокоточный линейный привод с шарико-винтовой передачей для станков с ЧПУ.Изображение предоставлено: Shutterstock.com/Nordroden
Что такое привод?
Приводы— это механические или электромеханические устройства, которые обеспечивают контролируемые, а иногда и ограниченные движения или позиционирование, которые приводятся в действие электрически, вручную или с помощью различных жидкостей, таких как воздух, гидравлическая жидкость и т. Д. Два основных движения — линейное и вращательное.Линейные приводы преобразуют энергию в прямолинейные движения, как правило, для приложений позиционирования и обычно имеют функцию толкания и тяги. Линейный привод также может быть отключен от источника питания и может управляться вручную с помощью вращающейся ручки или маховика. Поворотный привод преобразует энергию для обеспечения вращательного движения. Типичное использование — управление различными клапанами, такими как шаровые краны или дроссельные заслонки. Каждый привод имеет различную конфигурацию мощности и бывает разных стилей и размеров в зависимости от области применения.Приводы с линейной цепью обеспечивают толкающее и тянущее движение с помощью жестких цепей.
Электромеханические приводыИзображение предоставлено: Unique Automation
Лучшие поставщики и производители приводов
Вам нужно найти подходящего производителя или дистрибьютора приводов для вашего проекта? Платформа для поиска поставщиков на сайте Thomasnet.com — это исчерпывающий источник информации о поставщиках в США, содержащий информацию о более чем 500 000 производителей, дистрибьюторов и OEM-производителей.
Ниже мы вытащили из нашей базы данных ведущих производителей приводов для вашей справки. Для дальнейшего исследования, дополнений к вашему короткому списку и возможности отправлять RFI или другие вопросы поставщика, смотрите ссылки на профиль каждой компании (в таблице ниже).
Таблица 1 — Производители и дистрибьюторы приводов
| Компания | Главный офис | Годовая редакция | Сертификаты, регистрация или разнообразие | Тип компании |
|---|---|---|---|---|
| Erdmann Corp. | Луисвилл, KY | Нет в наличии. | Нет в наличии. | Дистрибьютор |
| Хансен Моторс | Princeton, IN | $ 50 — 99,9 млн |
|
Изготовитель на заказ |
| E-Motion, Inc. | Евгений, ИЛИ | $ 1 — 4,9 млн | Нет в наличии. | Дистрибьютор |
| Harmonic Drive, LLC | Пибоди, Массачусетс | 100 $ — 249.9М | Производитель | |
| Bishop-Wisecarver Corp. | Питтсбург, Калифорния | $ 10–24,9 млн |
|
Производитель |
| Баелц Северная Америка | Мариетта, Джорджия | Нет в наличии. |
|
Производитель |
| Pacific Industrial Service Co. | Сент-Хеленс, ИЛИ | 1–4,9 мил |
|
Дистрибьютор |
| ООО «Микроматик» | Берн, IN | $ 10–24,9 млн | Производитель | |
| OTP Industrial Solutions | Колумбус, Огайо | 100 $ — 249.9М |
|
Дистрибьютор |
| Island Components Group, Inc. | Холбрук, Нью-Йорк | $ 1 — 4,9 млн |
|
Производитель |
Сводные данные компании по производству электрических приводов
Erdmann Corp.
Компания Erdmann Corporation, основанная в 1933 году со штаб-квартирой в Луисвилле, штат Кентукки, является дистрибьютором широкого спектра приводов, клапанов и трубопроводной продукции. У компании также есть ремонтно-производственное предприятие, которое обслуживает арматуру.
Erdmann предлагает более десятка марок приводов, конденсатоотводчиков и многих других марок клапанов и сопутствующих товаров.
Хансен Моторс
Основанная в 1907 году часовщиком из Германии, компания Hansen Motor Corporation из Принстона, штат Индиана, превратилась в крупного производителя двигателей, серводвигателей и исполнительных механизмов.Их годовой объем производства превышает 5 000 000 двигателей в год, и в них работает более 200 человек.
Это компания, сертифицированная по стандартам ISO 9001 и 14001. Их продукты могут быть указаны по определенной скорости, напряжению, току, крутящему моменту и нескольким другим параметрам.
E-Motion, Inc.
Компания E-Motion Inc., базирующаяся в Юджине, штат Орегон, начала свою деятельность как компания по автоматизации электрических цепей. С тех пор он расширился, включив в него другие типы приводных систем, в том числе пневматические, вакуумные приводы и другие.
Как дистрибьютор, они в основном обслуживают тихоокеанский северо-запад и продают продукцию десятков различных брендов. К ним относятся Duravalve, Knudson, Fabco-Air, Metalwork и многие другие.
ООО «Гармоник Драйв»
КомпанияHarmonic Drive, LLC начала свою деятельность в начале 1960-х годов как производитель недавно запатентованного изобретения — волнового механизма деформации. К 1971 году герметичные приводы компании помогли привести в действие лунный вездеход, приземлившийся (и управляемый астронавтом Дэйвом Скоттом) на Луну!
С тех пор они разрабатывают и производят как стандартные, так и нестандартные редукторы, сервоприводы и другие компоненты.Их приводы включают в себя приводы переменного и постоянного тока, а также разные типы, включая линейные, энкодерные, сервоприводы и другие.
Bishop-Wisecarver Corp.
Компания Bishop-Wisecarver, основанная в 1950 году, была детищем фабриканта Бада Уайскарвера и продавца Рэя Бишопа. К 1962 году Bud получил инновационный патент, который помог оптимизировать отрасль транспортировки пищевых продуктов. К 1967 году Бад и Рэй объединили свои компании, и на свет появилась Bishop-Wisecarver Corp.
Сегодня BWC специализируется на технологиях производства систем движения.Сюда входят как приводы (линейные), так и подшипники, направляющие и салазки. Их приводы включают в себя все, от ременных приводов до электрических приводов, с множеством функций и приложений.
Баелц Северная Америка
Бренд Baelz восходит к 1896 году, уходя корнями в Хайльбронн, Германия. Компания Baelz Automatic по-прежнему работает там и сотрудничает с компанией Baelze North America, чтобы поставлять свои клапаны и приводы на рынок Северной Америки.
Baelz специализируется на регулирующих клапанах для горячего масла с сильфонным уплотнением из нержавеющей стали.Дополнительно они имеют несколько приводов (как пневматических, так и электрических), а также комплекты паровой системы.
Pacific Industrial Service Co.
Компания Pacific Industrial Service Co., расположенная в Сент-Хеленсе, штат Орегон, уже почти два десятилетия является ценным дистрибьютором и услугами по ремонту клапанов.
Это предприятие, принадлежащее ветеранам, имеет несколько сертификатов качества и разнообразия, включая сертификаты NBBI для котлов и сосудов под давлением, ASME BPVC и SBA. В их помещениях также есть полноценный механический цех.
ООО «Микроматик»
Micromatic LLC была основана в 1929 году и в настоящее время базируется в Берне, штат Индиана. Основное внимание они уделяют двум производственным линиям: поворотным приводам и системной интеграции «под ключ».
Предлагаемые ими приводы представлены в виде пневматических или гидравлических приводов и часто представлены под торговыми марками Rotac или Hyd-ro-ac.
OTP Промышленные решения
OTP Industrial Solutions была основана в 1963 году в Колумбусе, штат Огайо, как дистрибьютор оборудования для передачи энергии и насосов.С тех пор они широко расширились, включив в себя гораздо более обширный продуктовый портфель и 33 офиса по всей территории США.
Их продукция включает приводы различных типов, размеров, марок и областей применения. Некоторые из них включают линейные и бесштоковые приводы, гидравлические, поворотные, захватные и многие другие.
Island Components Group, Inc.
Island Components, Inc. — это нью-йоркский производитель прецизионных компонентов и приводов для применения в аэрокосмической промышленности.Они имеют сертификаты бережливого производства (ISO9001: 2008), а также MIL-SPEC (MIL-I-45208).
Изолированный чугунный шаровой кран с ручным приводом.Изображение предоставлено: Shutterstock.com/Promus
Типы приводов
См. Ниже разбивку различных типов приводов. Вы можете щелкнуть приведенные ниже ссылки, чтобы перейти непосредственно в соответствующий раздел.
Электрический линейный привод
Электрические линейные приводы — это механические линейные приводы с электрическим приводом, состоящие из двигателей, линейных направляющих и приводных механизмов, которые используются для преобразования электрической энергии в линейное смещение посредством механической передачи, электромагнетизма или теплового расширения для обеспечения прямой двухтактной линии. движение.Электрические линейные приводы используются в основном в приложениях автоматизации, когда компонент машины, инструмент и т. Д. Требует управляемого линейного перемещения в определенное положение. Они используются в широком спектре отраслей, где требуется линейное позиционирование. Приводы приводятся в действие несколькими способами, включая шариковые или ходовые винты, ремни или звуковые катушки, среди прочего. Типичные области применения включают открытие и закрытие заслонок, запирание дверей, торможение движений машины и т. Д.
Электрический поворотный
Электропривод поворотного типа представляет собой механическое устройство с электрическим приводом, состоящее из двигателей и механизмов выходного вала с ограниченным ходом вращения, которые используются для преобразования электрической энергии во вращательное движение.Они используются в приложениях автоматизации, когда для задвижки, клапана и т. Д. Требуется контролируемое перемещение в определенные положения вращения. Они также используются в широком спектре отраслей, где необходимо позиционирование. Приводы приводятся в действие двигателями различных типов, звуковыми катушками и т. Д.
Гидравлические линейные приводы
Линейные приводыFluid Power — это механические устройства, состоящие из цилиндров и поршневых механизмов, которые производят линейное перемещение за счет гидравлической жидкости, газа или перепада давления воздуха.Линейные приводы с гидравлическим приводом используются в основном в приложениях автоматизации, когда объекту требуется управляемое перемещение в определенное положение. Они используются в широком спектре отраслей, где требуется линейное позиционирование. Типичные области применения включают открытие и закрытие заслонок, зажим, сварку и т. Д.
Гидравлические поворотные приводы
Поворотные приводыFluid Power — это механические устройства, состоящие из цилиндров и поршневых механизмов, зубчатой передачи и выходных валов, обеспечивающих ограниченный ход вращения, которые используются для преобразования гидравлической жидкости, газа или перепада давления воздуха во вращательное движение.Гидравлический поворотный привод используется в основном в приложениях автоматизации, когда объекту требуется управляемое вращательное движение в определенное положение. Этот привод приводится в действие различными средами, включая воздух или другие газы и гидравлическую жидкость. Типичные области применения включают открытие и закрытие заслонок и дверей, зажим и т. Д.
Приводы с линейной цепью
Приводы с линейной цепью — это механические устройства, состоящие из звездочек и участков цепи, которые используются для обеспечения линейного движения через свободные концы специально разработанных цепей.Цепной линейный привод используется в основном в приложениях управления движением для обеспечения прямолинейного толкающего или тянущего движения. Цепь, когда она прямая, фиксируется на месте с соседними звеньями и образует жесткий элемент. Они доступны во многих размерах и стилях цепочки, а также с вариантами хранения цепочки в зависимости от доступного пространства в конкретном приложении. Этот привод обычно имеет одиночные ведущие шестерни или звездочки, которые создают силы, необходимые для толкающих и тянущих движений.
Ручные линейные приводы
Ручной линейный привод — это устройство, которое обеспечивает линейное перемещение за счет перемещения вручную вращаемых винтов или шестерен и состоит из ручных ручек или колес, коробок передач и управляемых механизмов линейного перемещения.Ручные линейные приводы используются в основном в коммерческих приложениях для точного позиционирования, например, для манипулирования инструментами или деталями. Ручные приводы не имеют питания и для работы используют вращающуюся ручку или маховик. Существует несколько типов, в том числе с ходовыми винтами, зубчатыми рейками, ременным приводом и т. Д., Каждый из которых имеет определенную нагрузку и способность приводного усилия. Термомеханические приводы относятся к другому типу и работают за счет теплового расширения, обычно в микромасштабе.
Ручные поворотные приводы
Ручной поворотный привод — это механическое устройство, которое обеспечивает поворотный выход за счет перемещения вручную вращаемых винтов, рычагов или шестерен, и обычно состоит из ручных ручек, рычагов или маховиков, коробок передач или механизмов с резьбовыми гайками и выходных валов. .Они используются в основном для работы клапанов. Они также известны как ручные приводы клапанов или приводы клапанов. Типы клапанов могут включать шаровые, дроссельные, обратные и запорные клапаны. Другие приложения могут включать любые, требующие ограниченного и контролируемого вращательного движения.
Привод как часть промышленного гидравлического и пневматического механизма в машине.Изображение предоставлено: Shutterstock.com/Beyond This
Применение приводов и отрасли
Приводы с приводомобычно включают в себя электродвигатели, цилиндры или другие устройства перемещения для вращения или линейного перемещения.Реечные и шестерни, шариковые винтовые пары и другие компоненты передачи энергии соединяют двигатели и т. Д. С нагрузками.
Приводыразделены по движению и источнику питания. Линейный привод производит толкающее / вытягивающее действие, а поворотный привод производит вращательное движение. Во многих случаях линейные приводы начинаются с вращающегося первичного двигателя — обычно двигателя — чье вращение преобразуется в линейное движение с помощью силового винта или аналогичного устройства. Верно и обратное: многие поворотные приводы могут начинаться с линейных устройств, таких как гидроцилиндры, которые создают круговое движение через зубчатую рейку.
Приводышироко используются для дистанционного управления клапанами. Оборудованный таким образом клапан называется регулирующим клапаном. Типичный привод для шарового клапана должен иметь возможность поворачивать шток клапана на много оборотов между открытием и закрытием. Часто привод шарового клапана состоит из электродвигателя, который приводит в движение червячную передачу, которая, в свою очередь, вращает гайку, которая входит в зацепление с резьбой штока привода клапана. В четвертьоборотных клапанах, таких как шаровые краны, часто используются пневматические приводы для проталкивания и вытягивания реек за шестерни, которые придают вращательное движение шару клапана, дроссельной заслонке и т. Д.
Приводытакже используются во многих приложениях с линейным перемещением, где пневматическая энергия недоступна для привода цилиндров или где требуется дополнительное усилие из-за компактных конструкций. В одном необычном линейном приводе используется цепь, которая в прямом положении образует жесткую длину, но может огибать ведущую шестерню для обеспечения ее движения. В других приводах линейного перемещения используются зубчатые ремни, ходовые винты или комплекты зубчатых колес для достижения толкающего / тянущего действия.
Электрические линейные приводы используются в упаковочных машинах, медицинском оборудовании, производственном оборудовании и т. Д.а также во множестве приложений транспортной отрасли от самолетов до железных дорог. В линейных приводах иногда сочетаются шаговые двигатели с шариковыми винтами для достижения точного управляемого позиционирования.
Соображения
Выбор приводов с приводом влечет за собой знание таких параметров, как нагрузка, длина хода, синхронизация и т. Д. Многие из этих параметров имеют ограничения по скорости и усилию, и сужение выбора таким образом может привлечь внимание к соответствующей технологии. Другие соображения включают виды доступных услуг.Гидравлические приводы создают большие силы при небольших размерах, но требуют источника гидравлического давления.
Приводыс пневматическим приводом используют доступный заводской воздух, но приходится идти на компромисс из-за их больших размеров для эквивалентных сил. Электрические приводы обладают преимуществами лучшей управляемости и меньшей подверженности утечкам. Электрические приводы, как правило, имеют значительно более высокие первоначальные затраты. Они также имеют преимущества при установке на открытом воздухе, где воздушные системы могут замерзнуть.
Пневматические приводы для клапанов делятся на два лагеря: двойного действия и с пружинным возвратом.Двойное действие означает, что давление воздуха перемещает клапан в обоих направлениях. Пружинный возврат означает, что пружина используется для одного хода, который давление воздуха должно преодолевать, чтобы открыть (или закрыть) клапан. Имеет значение, как клапан будет вести себя при потере давления воздуха. Пружинный возвратный клапан вернет клапан в отключенное состояние при потере давления воздуха. Гидравлические приводы могут быть установлены аналогичным образом.
Для управления движением некоторые линейные актуаторы предназначены для микропозиционирования и полагаются на пьезокристаллы для создания очень малых движений с высоким разрешением, которые полезны в нанометровом мире оптики, производства полупроводников и т. Д.Чаще всего приводы на основе ремня и шарико-винтовой передачи передают движение ступеням позиционирования и т.п. для достижения повторяемости, измеряемой в тысячных долях дюйма. Линейный привод можно использовать с ручным управлением, например, в стоматологических креслах.
Автоматический клапан с приводом для жидких продуктов.Изображение предоставлено: Shutterstock.com/Sandiwild
Важные атрибуты привода
Монтажная конфигурация
Это описывает способ, которым исполнительный механизм прикрепляется к приведенному в действие устройству.Приводы клапанов иногда монтируются непосредственно на фланец клапана или используют цапфы для доступа к сальникам штока клапана.
Элементы управления
При выборе здесь двойного действия или с пружинным возвратом будет выбран режим отказа привода при потере давления воздуха или гидравлического давления.
Выходной крутящий момент
Выходной крутящий момент применяется как к электрическим, так и к гидравлическим приводам вращения и описывает вращающую силу, которую привод может приложить к клапану, чтобы закрыть его.Обычно выражается в дюймах-фунтах. или Нм.
Максимальное усилие выдвижения / втягивания / удержания
Эти атрибуты применяются к поступательным приводам и иногда могут быть выражены как одно значение, например максимальное усилие тяги. Обычно они даются в фунтах-силах или N.
.Максимальная скорость
Для приводов с электроприводом это самая высокая линейная скорость или скорость вращения, которую может обеспечить агрегат. Обычно он выражается в оборотах в минуту для поворотных приводов и в дюймах в секунду для линейных устройств.
Степень защиты корпуса
Шкафы для электрических цепейуказаны в соответствии с критериями NEMA или IEC для защиты окружающей среды и внешних воздействий.
Список литературы
Другие артикулы приводов
Прочие «виды» изделий
Больше от Насосы, клапаны и аксессуары
Как работает электрический привод?
Электропривод — это механическое устройство, используемое для преобразования электричества в кинетическую энергию в одном линейном или вращательном движении. Он автоматизирует заслонку или клапан, чтобы повысить эффективность и сложность процесса. Конструкции электрических приводов основаны на конкретных задачах, которые они решают в рамках процессов, для которых они предназначены, и могут различаться как по размеру, так и по размеру.
В настоящее время электрические приводы находят больше применений в связи с стремлением к значительному усилению децентрализации в технологиях автоматизации. Новые контроллеры процесса теперь могут быть оснащены электрическими приводами последнего поколения, что упрощает соблюдение недавно обновленных стандартов автоматизации. Благодаря отказоустойчивым возможностям, которые позволяют пользователю контролировать процесс даже в случае потери мощности, использование электрических приводов теперь безопаснее, чем когда-либо прежде.
Основные компоненты электрического привода
Двигатель электрического привода может работать от любого напряжения и используется во многих различных отраслях промышленности.Наиболее распространенные напряжения, используемые в однофазных двигателях, составляют
.· 115 В переменного тока
· 24 В перем. Тока
· 12 В постоянного тока
· 24 В постоянного тока
· 208 В переменного тока
· 230 В переменного тока
В дополнение к этим опциям трехфазные двигатели также используют напряжения 230 В переменного тока и 460 В переменного тока.
Тормоз привода установлен на верхней части двигателя. Он отвечает за предотвращение принудительного открытия клапана средой, когда он должен быть закрыт, путем фиксации ротора двигателя в нужном положении, когда он не используется.
Пусковой конденсатор двигателя является третьим основным компонентом электрического привода с двигателем переменного тока. Это дает двигателю мощность, достаточную для запуска. Электроприводы с двигателями постоянного тока не требуют конденсатора.
Последний критический компонент электрического привода — это два однополюсных, двухпозиционных (SPDT) концевых выключателя хода. Один предназначен для закрытой позиции, а другой — для открытой позиции. Эти переключатели обеспечивают достаточное количество электрических контактов в немедленном, замкнутом и разомкнутом положениях.
Приложения: Где используются электрические приводы?
Электроприводы используются во многих отраслях промышленности. Обычно они используются в промышленных приложениях, связанных с производством клапанов, насосов и двигателей. Чаще всего они автоматизируют промышленную арматуру, и их используют многие типы технологических установок, в том числе:
· Заводы по добыче, переработке и переработке нефти и газа
· Очистные сооружения
· Электростанции
· Заводы по производству продуктов питания и напитков
· Сельскохозяйственные и сельскохозяйственные растения
· Целлюлозно-бумажные комбинаты
Общие вопросы и ответы
Как подключен двухпозиционный электропривод переменного тока?
Клеммная колодка соединяет провода с несколькими контактами.Контакт 1 почти всегда является нейтральной линией. Контакты 2 и 3 — это горячая линия для закрытых и открытых позиций. Реле, такое как контрольный переключатель, разделяет горячую линию.
Поставляется ли привод в закрытом или открытом положении?
В то время как наш стандарт — отгрузка в закрытом состоянии, мы можем отгрузить в открытом положении по запросу. Кроме того, наш двухпозиционный стандарт калибровки составляет 0-90 °, но мы можем настроить ход до 270 °.
Что делать, если клапан не закрыт или открыт полностью?
Ослабление установочного винта и поворот кулачков вправо или влево в желаемое положение позволяет отрегулировать кулачки.Цель состоит в том, чтобы заставить привод немного поворачиваться, чтобы полностью открыть или закрыть клапан. Установщики и специалисты по обслуживанию повторяют эту операцию как в закрытом, так и в открытом положении, пока не будут удовлетворены.
Вам нужно подать постоянное питание на электрический привод?
Либо контакты 1 и 2, либо контакты 1 и 3 всегда будут иметь питание. Концевые выключатели отключают питание двигателя, когда привод достигает необходимого положения, закрытого или открытого.
Вам действительно нужен пусковой конденсатор и тормоз на электроприводе?
На электрическом приводе переменного напряжения вам всегда понадобится пусковой конденсатор двигателя, чтобы дать двигателю мощность, достаточную для запуска.В закрытом положении тормоз под напряжением удерживает двигатель на месте. Без установленного тормоза, особенно на дроссельных заслонках и заслонках, существует риск того, что сила среды внутри труб толкнет клапан, слегка открывая его. Привод обнаруживает открытый клапан и обеспечивает его возврат в полностью закрытое положение. Это действие повторяется снова и снова, поскольку среда постоянно открывает клапан. В конце концов, это колебание приведет к повреждению двигателя и привода
.Качественные электрические приводы от Indelac Controls
Электрические приводы преобразуют электричество в кинетическую энергию либо во вращательном движении, либо в одном линейном направлении.Они автоматизируют ручное управление клапанами для повышения эффективности и являются важной частью многих приложений в нескольких отраслях.
Здесь, в Indelac Controls, мы стремимся предоставлять отличное и своевременное обслуживание нашим клиентам. Мы используем самое современное оборудование на каждом этапе производственного процесса, чтобы гарантировать высочайшее качество продукции.
Мы предлагаем четвертьоборотные и пружинно-поворотные электрические приводы, а также приводы с внутренним резервным аккумулятором. Для получения дополнительной информации об электрических приводах загрузите нашу новую электронную книгу об электрических приводах.
Что такое электрический привод?
Какова функция электрического привода?
Электрический привод — это устройство, которое может создавать движение груза или действие, требующее силы, например зажима, с использованием электродвигателя для создания необходимой силы.
Как работает электропривод?
Электродвигатель создает вращательное движение при вращении шпинделя или ротора.Шпиндель двигателя напрямую соединен со спиральным винтом через приводной вал, который, в свою очередь, вращается в гайке шарико-винтовой передачи.
При вращении шпинделя гайка шарико-винтовой передачи перемещается вперед или назад по спиральному винту.
Полый шток поршня прикреплен к гайке шарико-винтовой передачи, и это создает линейное движение из или внутрь линейного привода, когда двигатель вращается по или против часовой стрелки.
Двигатель управляется электрическим приводом, который позволяет изменять скорость вращения и, следовательно, линейную скорость привода.Механизм обратной связи дает информацию о положении, и линейный привод может быть запрограммирован на перемещение в определенное положение, остановку, а затем движение вперед или возврат в свое исходное положение.
Мощность двигателя будет определять крутящий момент, который может быть создан, и, следовательно, силу, которая может быть приложена к полезному движению через привод.
Как выбрать электропривод?
Привод потребуется для приложения, требующего силы. В пневматическом линейном приводе сила создается давлением, действующим на поверхность поршня.В электрических приводах сила создается за счет крутящего момента двигателя. Перемещаемая нагрузка, любые силы трения поверхности и угол подъема или наклона груза — все это будут критическими параметрами, которые необходимо учитывать.
Для пневматических приводов нагрузка должна переместиться на определенное расстояние, которое определяет ход привода. То же самое верно и для электрического привода с некоторыми небольшими отличиями. Для защиты от перебега «полезный» ход — это максимальный ход за вычетом четырехкратного шага винта.Электрический привод может использоваться для ряда положений; поэтому требуемый ход должен учитывать общее движение. Доступны винты разного шага в зависимости от диаметра отверстия, что позволяет сочетать компоненты в различных областях применения.
Также полезно учитывать, когда электрический привод будет предпочтительнее пневматического решения. В ситуации, когда подача сжатого воздуха недоступна, электрическая является единственной альтернативой (если гидравлические решения также недоступны).
Ключевым преимуществом электрических линейных приводов является необходимость наличия нескольких положений в приложении. Другие преимущества: более высокое осевое усилие; высокая точность; тихий шум; гибкость за счет характеристик управления; жесткость нагрузки и более низкие эксплуатационные расходы.
Типы электроприводов
Электроприводы бывают стержневыми или бесштоковыми, с двигателями и приводами или без них. Двигатели могут быть установлены аксиально за корпусом привода или параллельно приводу в четырех положениях.
Типичные области применения электрических приводов
Электрические приводы находят свое применение в самых разных областях промышленности.
В автомобильной промышленности для беспилотных транспортных средств, дозирование и выбор методов соединения — склеивание, сварка и клепка.
В пищевой промышленности для производства ПЭТ-бутылок, систем розлива и этикетирования, а также роботизированных приложений, таких как доильные роботы.
Они используются при транспортировке материалов для таких операций, как сервопрессы и зажимы, и широко используются в упаковочном секторе.
Их преимущества в точности, гибкости и низких эксплуатационных расходах позволяют использовать их в робототехнике, электронике и сборке электроники, станках и во многих других отраслях промышленности.
Нужно ли мне что-нибудь еще для работы электрических приводов?
Необходимы подходящие источники электропитания и соответствующие кабели, ведущие к оборудованию. Для передачи сигналов питания и управления между двигателем и приводом потребуются кабели. Приводы могут быть установлены, и переключатели могут использоваться для определения положения.
Control Engineering | Объяснение приводов: типы приводов, выбор применения, обслуживание
Гилберт Уэлсфорд-младший. 6 августа 2021 г.
Цели обучения
- Узнайте о типах промышленных приводов.
- Подумайте, как выбрать правильный привод для применения.
- Посмотрите, как обслужить приводы. / Li>
требуется тщательный анализ требований к применению, прежде чем выбрать подходящий привод.
Что такое привод?
Привод — это механическое или электромеханическое устройство, преобразующее энергию управляющего сигнала в механическое движение. Проще говоря, исполнительный механизм — это устройство, которое позволяет управлять перемещением или позиционированием.
Приводамнеобходимы управляющий сигнал и источник энергии для механического движения. Приводы используют источник энергии, такой как электрический, сжатый воздух или гидравлическое давление, и управляющий сигнал, который может быть ручным, автоматической электронной системой, фиксированной механической системой, системой, запускаемой программным обеспечением, или роботизированной системой управления.
От регулирования потока топлива в газовую турбину до рабочих клапанов и гидроцилиндров на промышленных предприятиях, приводы служат для общей цели управления движением и являются ключевым компонентом в нескольких промышленных приложениях для управления клапанами.
Какие бывают типы приводов? Приводы классифицируются в зависимости от типа движения, которое они производят, и типа мощности или источника энергии, которые они используют для управления приложением.
Типы приводов: на основе движения
Приводымогут создавать два основных типа движений — линейное и вращательное.
- Линейные приводы : Линейные приводы клапанов используются для преобразования электрической, пневматической и гидравлической энергии в двухтактное или линейное движение. Линейный привод может создавать как движение вперед, так и назад на заданной линейной плоскости. Большая часть оборудования на предприятиях по переработке пищевых продуктов и напитков, где требуется прямолинейное движение, использует линейные клапаны для управления потоком сырья и готовой продукции.
- Поворотные приводы : Поворотные приводы совершают круговое движение.Машины с вращающимися частями имеют поворотный привод, совершающий вращательное движение в круговой плоскости. Поворотные приводы широко используются в регулирующих клапанах и шаровых кранах. Поворотный привод может продолжать вращаться в заданном направлении, и они могут двигаться вперед и назад. Приводы поворотных клапанов часто используются в нефтегазовой промышленности.
Линейные и поворотные приводы могут использоваться вместе в случаях, когда механизм требует работы в двух плоскостях движения, требующих как вращательных движений, по часовой стрелке и против часовой стрелки, так и линейного движения вверх и вниз.
Шесть типов исполнительных механизмов — Источник энергии
Различные типы приводов, классифицируемые в зависимости от источника энергии, приведены ниже
.Пневматические приводы : Пневматические приводы используют вакуум или сжатый газ в качестве поршня внутри цилиндра для создания механического движения.
Есть цилиндры одностороннего действия, которые имеют одно отверстие, через которое сжатый газ входит в одном направлении. Сжатый воздух заставляет поршень двигаться в одном направлении, сжимая пружину, установленную на поршне.Цилиндры двойного действия выдвигаются и втягиваются без пружины и имеют два порта, через которые воздух может входить и выходить.
Приводы с пневматическим приводом предпочтительнее, потому что они безопасны, обычно быстры, экономичны и могут создавать большой крутящий момент при небольших изменениях давления. Из-за высокого давления, необходимого для приведения в действие пневматического привода, эти клапаны реагируют быстро и являются предпочтительным выбором в тех случаях, когда вам необходимо немедленно остановить и запустить основные элементы управления.
Помимо многих других применений, пневматические приводы часто используются на клапанах, используемых для управления потоком охлаждающей воды на электростанциях.
Электрические приводы : Электрические приводы требуют электроэнергии для обеспечения движения. Электроприводы, приводимые в движение легкодоступным источником энергии, считаются более энергоэффективными и экологически чистыми.
Самая большая проблема с электрическими приводами — это их перегрев при резких изменениях рабочего цикла. Более низкие скорости из-за инерции также делают его менее популярным в определенных приложениях. Некоторые из наиболее часто используемых применений — это открытие и закрытие дроссельных или шаровых кранов.Электрические приводы подразделяются на электромеханические приводы и электрогидравлические приводы.
Электромеханические приводы: эти приводы преобразуют электрические сигналы во вращательные движения, линейные движения или их комбинацию. Электромеханические приводы точны, имеют более длительный срок службы и не требуют значительного обслуживания.
Электрогидравлические приводы : Эти приводы имеют электрическое питание, но приводят в движение гидроаккумулятор, который, в свою очередь, обеспечивает силу для движения.Когда используются эти приводы, нет необходимости в отдельном гидравлическом насосе; это снижает стоимость и повышает надежность и безопасность.
Гидравлические приводы : Гидравлические приводы имеют цилиндр или гидравлический двигатель с поршнем, который использует гидравлическую энергию для создания механического движения. Механическое движение, в свою очередь, преобразуется в линейное, вращательное или колебательное движение в соответствии с приложением.
Жидкости почти несжимаемы; изменения плотности, вызванные давлением и температурой, незначительны.По этой причине величина крутящего момента, создаваемого клапаном с гидравлическим приводом, высока, что делает его очень мощным. Есть клапаны с гидравлическим приводом одностороннего действия, которые оказывают давление на одну сторону поршней, перемещая их в противоположном направлении. Для обратного движения потребуется пружина. С другой стороны, гидравлические приводы двойного действия оказывают давление на обе стороны поршня для движения с обеих сторон.
Некоторые области применения, где используются гидравлические приводы, — это основные запорные и регулирующие клапаны для трубопроводов паровой турбины высокого давления.
Магнитные приводы : Магнитные приводы используют магнитные эффекты для создания механической силы, вращательного или линейного движения, непрерывного или ограниченного движения. Магнитные приводы используются в широком спектре систем отопления, вентиляции и кондиционирования воздуха для перекрытия или смешивания жидкостей и пара.
Термоприводы : Термический привод генерирует линейное движение в ответ на изменения температуры, используя поршень и термочувствительный материал.
Термоприводышироко используются в приложениях, где необходимо смешивание и отвод жидкости, а также в процессах безопасного отключения, где требуется открыть или закрыть клапан в зависимости от заданного значения температуры.
Приводы термоклапанамогут работать даже при отключении электроэнергии, они надежны и безопасны, поскольку не подвержены коротким замыканиям.
Приводывключены в несколько категорий в базе данных «Новые продукты для инженеров». Предоставлено: CFE Media and Technology, Control Engineering
Как правильно выбрать привод
Каждый привод имеет уникальное назначение и потребность в энергии.Чтобы выбрать правильный привод клапана, важно понимать, как работает каждый привод.
Обратите внимание на следующие моменты, чтобы выбрать правильный привод:
- Источник питания: Одним из наиболее важных факторов при выборе правильного привода клапана является доступный источник питания. Для промышленной площадки с бесперебойным источником сжатого воздуха правильным выбором будет пневмопривод. Однако, если сжатый воздух недоступен, вы можете выбрать электрический или гидравлический тип.
- Требуемое перемещение: Еще одним важным фактором при выборе привода является требуемое перемещение для вашего приложения. Определите диапазон движения, необходимый для вашего оборудования — линейное, вращательное или их комбинацию — и выберите правильный привод для клапана.
- Точность: В некоторых отраслях требуется более высокий уровень точности и повторяемости, чем в других. Пневматические приводы — превосходный выбор для определенных движений.
- Безопасность — номинальные требования NEMA: Безопасность должна быть еще одним решающим фактором при выборе привода клапана.Важно знать, в какой среде будет использоваться привод. Вам необходимо принять во внимание требования к рейтингу NEMA и следовать руководящим указаниям NEMA для повышения безопасности.
Объяснение номинальных характеристик корпуса NEMA
Наиболее распространенными рейтингами NEMA являются NEMA 4, 4x и 7.
- Кожухи NEMA 4 предназначены для внутреннего или наружного применения и обеспечивают определенную степень защиты персонала от случайного контакта, водонепроницаемы — защита от падающей грязи, дождя, мокрого снега, снега, переносимой ветром пыли, водяных брызг и воды, направляемой из шланга — и внешнее образование льда. Корпуса
- NEMA 4X такие же, как NEMA 4, но обеспечивают дополнительный уровень защиты от коррозии. Корпуса
- NEMA 7 могут использоваться в зонах с особыми опасными условиями и могут выдерживать давление, возникающее в результате внутреннего взрыва газов, и соответствуют техническим требованиям к испытаниям на взрыв, гидростатические и температурные испытания.
Например, использование электрического привода вблизи источника воды без защитных кожухов и других мер безопасности может быть опасным.
Обслуживание исполнительного механизма
Клапаны с приводом, как и другое промышленное оборудование, подвержены воздействию опасных сред, износу и истиранию. Все приводы клапанов должны проходить профилактическое обслуживание до:
- Увеличение срока службы приводов клапанов.
- Повышение надежности привода.
- Выявите любые проблемы до того, как они возникнут и повлияют на работу.
- Снижение затрат на техническое обслуживание.
- Предотвратите серьезные отключения и простои.
При обслуживании привода необходимо учитывать следующие моменты:
- Регулярно проверяйте приводы на предмет износа.
- Проверить на утечки и уровни гидравлической жидкости. Если вы обнаружите незакрепленные или поврежденные детали в вашем приводе, замените их.
