Что такое бесщеточный двигатель постоянного тока. Как устроен бесщеточный двигатель. Как работает бесщеточный двигатель. Какие преимущества у бесщеточных двигателей. Где применяются бесщеточные двигатели.
Что такое бесщеточный двигатель постоянного тока
Бесщеточный двигатель постоянного тока (БДПТ) — это электродвигатель, в котором отсутствует щеточно-коллекторный узел, а переключение тока в обмотках осуществляется с помощью электронного коммутатора. Основные компоненты БДПТ:
- Статор с обмотками
- Ротор с постоянными магнитами
- Электронный коммутатор (контроллер)
- Датчики положения ротора (в большинстве конструкций)
В отличие от коллекторных двигателей, в БДПТ обмотки расположены на статоре, а магниты — на роторе. Это позволяет избавиться от щеток и коллектора, что значительно повышает надежность и КПД двигателя.
Устройство бесщеточного двигателя постоянного тока
Рассмотрим подробнее основные компоненты БДПТ:
Статор
Статор БДПТ представляет собой неподвижную часть двигателя, на которой расположены обмотки. Обычно используется трехфазная обмотка, состоящая из трех секций, смещенных на 120 электрических градусов. Обмотки могут быть соединены звездой или треугольником.
Ротор
Ротор — это вращающаяся часть двигателя. На роторе БДПТ расположены постоянные магниты, создающие магнитное поле. Обычно используются мощные неодимовые магниты. Количество полюсов ротора может быть различным, но всегда четным.
Электронный коммутатор
Коммутатор (контроллер) управляет подачей тока в обмотки статора в зависимости от положения ротора. Он состоит из силовых транзисторов и схемы управления. Коммутатор выполняет следующие функции:
- Определение положения ротора
- Формирование управляющих сигналов для транзисторов
- Регулирование скорости и момента двигателя
Датчики положения ротора
Для определения положения ротора в большинстве БДПТ используются датчики Холла или энкодеры. Они позволяют точно определить момент переключения обмоток. В некоторых конструкциях применяется бездатчиковое управление по противо-ЭДС обмоток.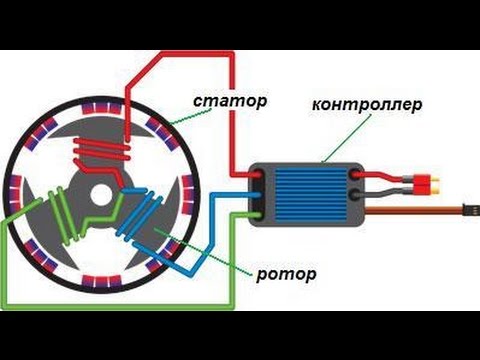
Принцип работы бесщеточного двигателя постоянного тока
Принцип работы БДПТ основан на взаимодействии магнитных полей статора и ротора. Рассмотрим последовательность работы:
- Контроллер определяет текущее положение ротора с помощью датчиков.
- На основе этой информации контроллер подает ток в соответствующую пару обмоток статора.
- Магнитное поле обмоток взаимодействует с полем постоянных магнитов ротора, создавая крутящий момент.
- Ротор поворачивается.
- Процесс повторяется, обеспечивая непрерывное вращение.
Переключение тока в обмотках происходит в строго определенные моменты времени, что обеспечивает высокую эффективность двигателя. Скорость вращения регулируется изменением частоты переключения, а момент — величиной тока в обмотках.
Преимущества бесщеточных двигателей постоянного тока
БДПТ обладают рядом существенных преимуществ по сравнению с коллекторными двигателями:
- Высокий КПД (до 90-95%)
- Большой срок службы из-за отсутствия щеточно-коллекторного узла
- Низкий уровень электромагнитных помех
- Широкий диапазон регулирования скорости
- Высокая динамика
- Компактные размеры и малый вес
- Возможность работы в агрессивных средах
Эти преимущества обеспечивают широкое применение БДПТ в различных областях техники.

Области применения бесщеточных двигателей постоянного тока
БДПТ находят применение во многих сферах, где требуются надежные и эффективные приводы. Основные области применения:
- Бытовая техника (кондиционеры, холодильники, стиральные машины)
- Компьютерная техника (вентиляторы охлаждения, приводы жестких дисков)
- Промышленное оборудование (станки с ЧПУ, роботы, конвейерные системы)
- Автомобильная промышленность (электроусилитель руля, стеклоподъемники)
- Авиационная и космическая техника
- Медицинское оборудование
- Электротранспорт (электровелосипеды, электросамокаты, электромобили)
Широкое распространение БДПТ обусловлено их высокой эффективностью и надежностью.
Управление бесщеточным двигателем постоянного тока
Управление БДПТ осуществляется с помощью специализированных контроллеров. Основные функции контроллера:
- Определение положения ротора
- Формирование последовательности коммутации обмоток
- Регулирование скорости и момента двигателя
- Защита двигателя от перегрузок
Существует несколько алгоритмов управления БДПТ:

- Трапецеидальное управление — простой метод, обеспечивающий удовлетворительные характеристики.
- Синусоидальное управление — более сложный метод, обеспечивающий плавное вращение и низкий уровень пульсаций момента.
- Векторное управление — наиболее совершенный метод, позволяющий достичь максимальной эффективности и динамики.
Выбор алгоритма управления зависит от требований к характеристикам привода и сложности реализации.
Сравнение бесщеточных и коллекторных двигателей постоянного тока
Рассмотрим основные отличия БДПТ от коллекторных двигателей:
| Характеристика | БДПТ | Коллекторный двигатель |
|---|---|---|
| КПД | 90-95% | 75-80% |
| Срок службы | Длительный | Ограничен износом щеток |
| Уровень шума | Низкий | Высокий |
| Электромагнитные помехи | Низкие | Высокие |
| Сложность управления | Сложное | Простое |
| Стоимость | Высокая | Низкая |
Как видно из сравнения, БДПТ превосходят коллекторные двигатели по большинству параметров, но имеют более высокую стоимость и сложность управления.
Перспективы развития бесщеточных двигателей постоянного тока
Технологии БДПТ продолжают активно развиваться. Основные направления совершенствования:
- Разработка новых магнитных материалов для повышения удельной мощности
- Совершенствование алгоритмов управления для улучшения характеристик
- Создание интегрированных решений, объединяющих двигатель и контроллер
- Повышение энергоэффективности за счет оптимизации конструкции
- Расширение диапазона мощностей и скоростей вращения
Эти разработки позволят еще больше расширить сферу применения БДПТ и повысить их эффективность.
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
- Определение
- Устройство и принцип действия
- Виды БДПТ
- Схема подключения
- Где применяются бесколлекторные двигатели
- Преимущества и недостатки
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором.
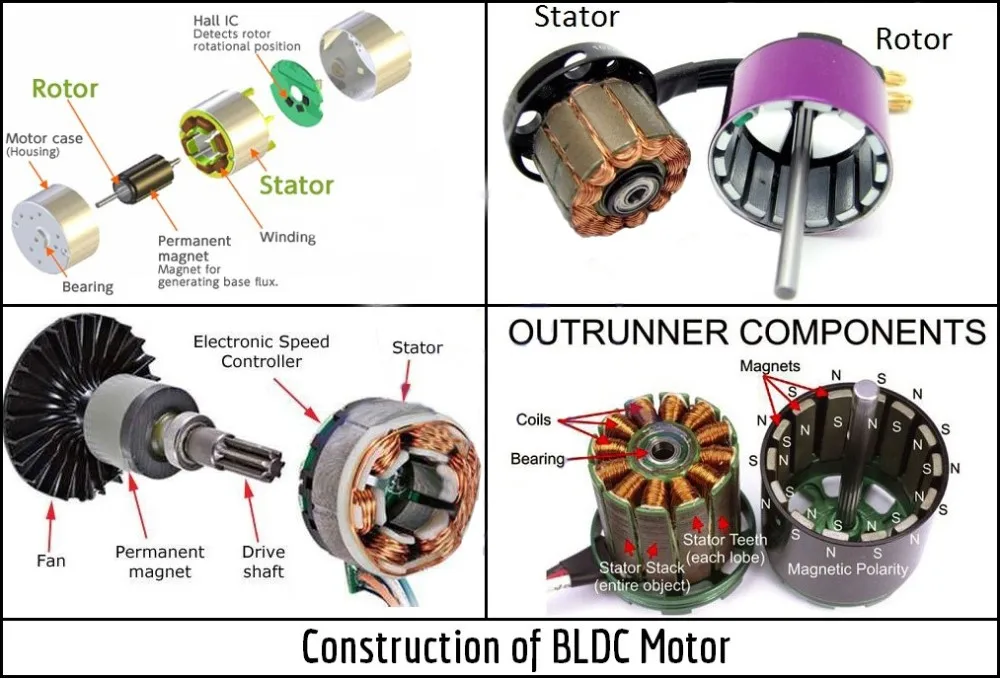 Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу).
 Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение. - Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
- Что такое ротор и статор
- Как собрать простейший электродвигатель в домашних условиях
- Отличие постоянного тока от переменного
Опубликовано 17.06.2019 Обновлено 05.07.2019 Пользователем Александр (администратор)
Управление бесколлекторным двигателем постоянного тока, принцип работы
Содержание
- Преимущества бесколлекторного двигателя
- Как работает бесколлекторный двигатель постоянного тока
- Управление бесколлекторным двигателем постоянного тока
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты. В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе).
 Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
Широкое распространение этого вида регуляторов объясняется простотой их изготовления. - С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Применение бесщеточных двигателей постоянного тока
: примеры, демонстрирующие их характеристики.
 Двигатели постоянного тока
Двигатели постоянного тока со щетками или без них используются в самых разных областях, отличаются высоким пусковым моментом и способностью вращаться с высокой скоростью. Бесщеточные двигатели постоянного тока работают тише, чем щеточные двигатели, имеют более длительный срок службы и меньшие требования к техническому обслуживанию.
На этой странице показано, где используются бесщеточные двигатели постоянного тока, и описано их применение в различных областях.
Особенности и преимущества бесщеточных двигателей постоянного тока
Начнем с простого объяснения того, что такое двигатели постоянного тока. Двигатели постоянного тока — это электродвигатели, работающие от постоянного тока. Особенности включают вращение на высокой скорости и способность обеспечивать высокий пусковой крутящий момент. Скорость и крутящий момент двигателя регулируются напряжением привода.
Двигатели постоянного тока можно разделить на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока в зависимости от того, используют ли они щетки в качестве электрода. Более короткий срок службы щеточных двигателей постоянного тока объясняется тем, что они оснащены щетками и коллектором, которые являются расходными частями. С другой стороны, бесщеточные двигатели постоянного тока, как следует из их названия, не имеют щеток. Вместо этого они приводятся в действие путем включения и выключения транзистора в цепи привода на основе сигнала от магнитного датчика внутри двигателя.
Более короткий срок службы щеточных двигателей постоянного тока объясняется тем, что они оснащены щетками и коллектором, которые являются расходными частями. С другой стороны, бесщеточные двигатели постоянного тока, как следует из их названия, не имеют щеток. Вместо этого они приводятся в действие путем включения и выключения транзистора в цепи привода на основе сигнала от магнитного датчика внутри двигателя.
Поскольку в бесщеточных двигателях постоянного тока не используются расходуемые щетки, а поток тока переключается электронным способом, они отличаются низкими эксплуатационными расходами и длительным сроком службы. Еще одна привлекательность заключается в том, что они работают тише, чем коллекторные двигатели.
Низкий уровень шума двигателя означает, что они часто используются для обеспечения более тихой работы бытовых электронных устройств и другого подобного оборудования.
Применение в бытовой технике и коммерческих электротехнических изделиях
Хотя в повседневной жизни мало возможностей увидеть бесколлекторные двигатели постоянного тока в действии, их часто можно найти в широко используемых бытовых приборах. Кондиционеры и холодильники являются двумя примерами. В таких устройствах используются вентиляторы для подачи охлажденного или теплого воздуха, а для привода этих вентиляторов используются бесщеточные двигатели постоянного тока.
Кондиционеры и холодильники являются двумя примерами. В таких устройствах используются вентиляторы для подачи охлажденного или теплого воздуха, а для привода этих вентиляторов используются бесщеточные двигатели постоянного тока.
Аналогичным образом двигатели все чаще используются в электрических вентиляторах. Лопасти бытовых вентиляторов вращаются с очень высокой скоростью и имеют тенденцию создавать шум двигателя. Поэтому бесщеточные двигатели постоянного тока широко используются в моделях, отличающихся бесшумной работой и тонкой регулировкой мощности вентилятора.
Двигатели также используются в коммерческих электротехнических изделиях. Примеры включают подачу бумаги в лазерные принтеры, управление пропеллерами и подвесом в дронах, поворот отверток или пил в электроинструментах. Другими словами, бесщеточные двигатели постоянного тока чрезвычайно универсальны.
Примеры использования бесщеточного двигателя постоянного тока
Больше, чем просто замена двигателя. Другие проблемы преодолеваются для достижения дальнейшего уменьшения размера.
Другие проблемы преодолеваются для достижения дальнейшего уменьшения размера.
Кухонное оборудование
Предложение запускает разработку нового продукта, преодолевая скрытые препятствия. Снижение затрат на разработку вместе с повышенной энергоэффективностью продукта.
Холодильные витрины
Применение в прецизионных устройствах
Бесщеточные двигатели постоянного тока широко используются в прецизионных устройствах. Основные примеры включают жесткие диски, используемые в ПК и DVD-плеерах, других ПК-дисках и рекордерах Blu-Ray. Вращение диска является жизненно важной функцией для этих устройств. В шпинделях, вращающих диски, используются бесщеточные двигатели постоянного тока.
Для большинства повседневных применений этого типа требуется длительный срок службы изделия. Благодаря длительному сроку службы и низким требованиям к техническому обслуживанию бесщеточные двигатели постоянного тока заняли важную нишу в секторе точных устройств.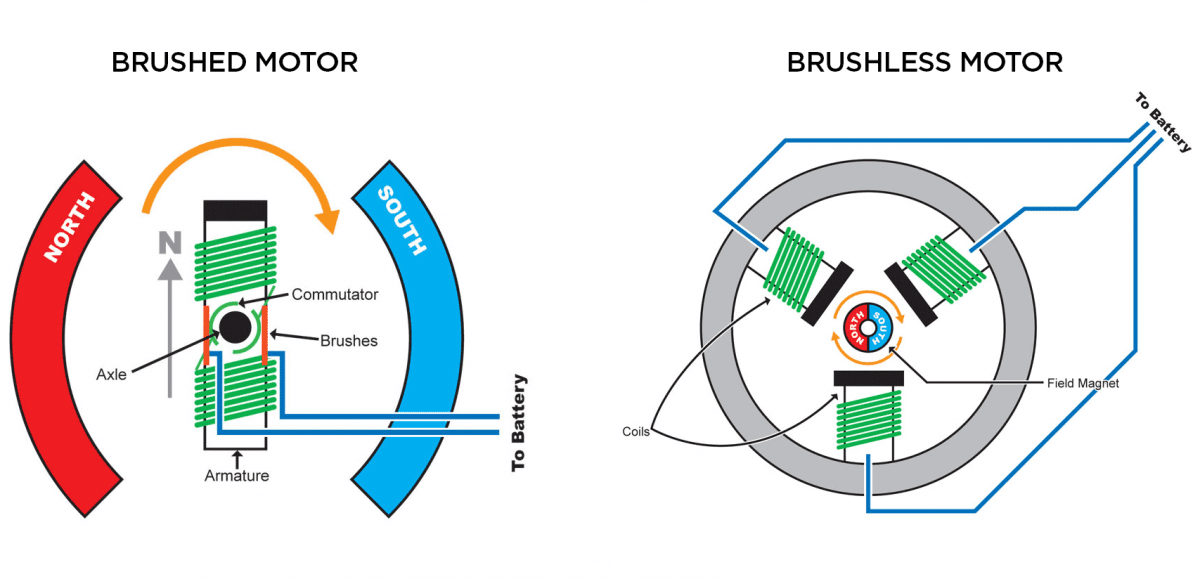
Применение в автомобильной промышленности
Как уже отмечалось, использование бесщеточных двигателей постоянного тока в последние годы растет. Причем именно в автомобильной промышленности этот рост был наиболее выражен. В управлении автомобилем участвует широкий спектр электронных устройств. Среди основных приложений:
- Электродвигатели рулевого управления с усилителем
- Электродвигатели распределителя масла
- Электродвигатели регулировки положения фар
- Электродвигатели стояночного тормоза
- Электродвигатели активного стабилизатора
- Электродвигатели для автоматического открывания и закрывания люка
- Электродвигатели дверных замков
- Электродвигатели для открывания и закрывания дверей
- Электродвигатели вентилятора охлаждения сиденья
Транспортные средства представляют опасность не только для водителя и пассажиров, но и для пешеходов и других участников дорожного движения. Благодаря длительному сроку службы и низким требованиям к техническому обслуживанию бесщеточные двигатели постоянного тока широко используются в приложениях, направленных на сведение этого риска к абсолютному минимуму. Между тем, тихая работа этих двигателей также помогает обеспечить более комфортное вождение.
Благодаря длительному сроку службы и низким требованиям к техническому обслуживанию бесщеточные двигатели постоянного тока широко используются в приложениях, направленных на сведение этого риска к абсолютному минимуму. Между тем, тихая работа этих двигателей также помогает обеспечить более комфортное вождение.
Определение областей применения, в которых характеристики бесщеточного двигателя постоянного тока могут быть использованы с пользой
Поскольку в бесщеточных двигателях постоянного тока не используются щетки, они отличаются долгим сроком службы, простотой обслуживания и бесшумной работой. Воспользовавшись этими функциями, они используются во многих различных аспектах нашей жизни.
Они варьируются от электронных устройств, обычно используемых в качестве бытовых приборов, до электрических изделий для промышленного применения. Их использование в этих продуктах разнообразно. В последние годы они также все чаще используются в автомобильной промышленности, где предъявляются требования к комфорту и безопасности. Возможно, вам следует по-новому взглянуть на то, как бесколлекторные двигатели постоянного тока можно использовать в вашей области.
Возможно, вам следует по-новому взглянуть на то, как бесколлекторные двигатели постоянного тока можно использовать в вашей области.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки. Вы боретесь со следующими проблемами?
Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей на стороне?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
Уникальное требование
- Вам нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, обеспечивающий требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Что такое бесщеточный двигатель постоянного тока?
Хотя электродвигатели бывают самых разных форм, за некоторыми исключениями, все они работают по одному и тому же общему принципу: вращение вала двигателя осуществляется за счет притяжения и отталкивания между северным и южным полюсами магнита и магнитным полем. вырабатывается электрическим током.
Двигатели, использующие источник питания постоянного тока (DC) для вращения вала, называются двигателями постоянного тока и делятся на коллекторные и бесщеточные (BLDC).
Возникает вопрос: что такое кисти?
Щетки — это внутренние части двигателя постоянного тока, которые используются вместе с коммутатором, причем коммутация является одним из способов, с помощью которых двигатели постоянного тока могут обеспечивать непрерывное вращение. Соответственно, двигатели постоянного тока, которые включают коммутатор и щетки, называются щеточными двигателями постоянного тока, а те, в которых используется электронная схема вместо коммутатора и щеток, называются бесщеточными двигателями постоянного тока (BLDC).
Различия между щеточными и бесщеточными двигателями постоянного тока
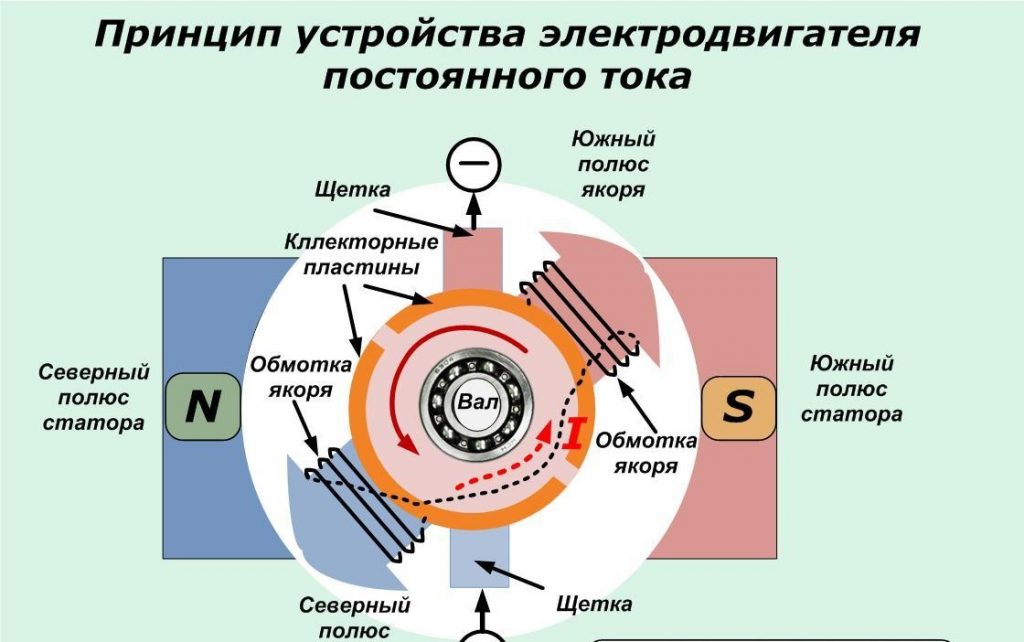
Чтобы вал двигателя постоянного тока вращался в одном направлении, необходим механизм, который переключал бы направление потока электрического тока один раз на пол-оборота (процесс, называемый «коммутацией»). В коллекторных двигателях постоянного тока это достигается механическими средствами с использованием коммутатора и щеток.
Однако, поскольку в этом механизме щетки и коллектор остаются в электрическом контакте при вращении вала, эти детали имеют тенденцию к износу из-за трения при длительном использовании. Другими словами, они являются расходными деталями и требуют периодического обслуживания. Другая проблема заключается в том, что этот непрерывный электрический контакт создает как электрический, так и акустический шум.
Напротив, бесщеточные двигатели постоянного тока устраняют необходимость в щетках и коммутаторе, вместо этого они включают электронную схему, определяющую угловое положение вала. Это также устраняет связанное с этим техническое обслуживание и снижает уровень шума.
Это также устраняет связанное с этим техническое обслуживание и снижает уровень шума.
Принцип работы щеточного двигателя постоянного тока
Коллекторные двигатели постоянного тока имеют обмотку катушки в роторе. По мере вращения ротора щеточные соединения переключаются между коммутаторами, тем самым переключая поток электрического тока через каждую катушку.
Путем переключения направления электрического тока в соответствующие моменты ротор может вращаться непрерывно.
Принцип работы бесщеточного двигателя постоянного тока
В бесщеточном двигателе постоянного тока нет необходимости в коллекторе и щетках, поскольку в роторе установлены постоянные магниты. Вращение ротора поддерживается за счет определения положения магнитных полюсов ротора и соответствующего переключения электрического тока через катушки. По этой причине для бесщеточного двигателя постоянного тока требуется драйвер (электронная схема привода). Между тем определение положения вала ротора осуществляется с помощью датчика Холла или других магнитных датчиков (хотя существуют и бессенсорные двигатели, которые могут работать без такого датчика).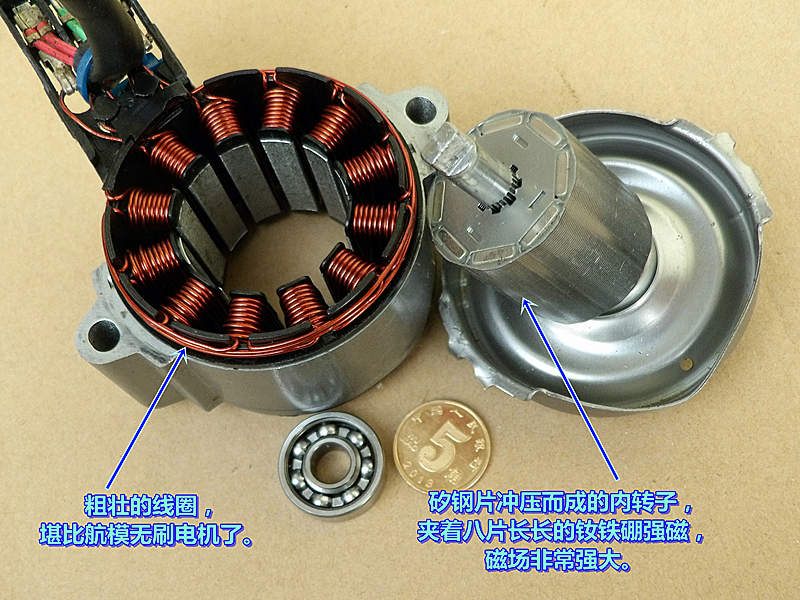
Датчики Холла используют эффект Холла для определения напряженности магнитного поля. Преобразовывая это в электрический сигнал, драйвер может определять положение постоянного магнита (ориентацию его северного и южного полюсов) и переключать поток электрического тока через его катушки таким образом, чтобы поддерживать вращение вала двигателя. .
Характеристики щеточных и бесщеточных двигателей постоянного тока
Характеристики коллекторных и бесщеточных двигателей постоянного тока следующие.
Характеристики коллекторных двигателей постоянного тока
- Преимущества
-
- Нет необходимости в электронной схеме управления (если не требуется регулирование скорости)
- Простота в использовании и управлении
- Недостатки
-
- Требуется техническое обслуживание из-за износа щеток и коллектора
- Щетки создают электрический и акустический шум
Характеристики бесщеточных двигателей постоянного тока
- Преимущества
-
- Нет контакта между коллектором и щетками, что означает долгий срок службы двигателя
- Способен работать на высоких скоростях
- Отличное отслеживание и отзывчивость
- Недостатки
-
- Требуется схема привода
- Имеет тенденцию иметь более высокую общую стоимость
Типы бесщеточных двигателей постоянного тока
Бесщеточные двигатели постоянного тока можно условно разделить на двигатели с внешним и внутренним ротором.
Двигатель с внешним ротором
Постоянные магниты расположены на роторе, который вращается вокруг внешней стороны обмоток катушки статора. Это обеспечивает стабильность вращения.
Двигатель с внутренним ротором
Постоянные магниты находятся на роторе, который расположен внутри, а обмотки катушки статора снаружи. Это обеспечивает точное управление, аналогичное коллекторному двигателю постоянного тока.
Применение для бесщеточных двигателей постоянного тока
Благодаря небольшим размерам, высокой мощности, низкому уровню шума и вибрации, а также длительному сроку службы бесщеточные двигатели постоянного тока находят широкое применение в таких устройствах, как воздухоочистители и другие системы кондиционирования воздуха, бытовая техника, холодильники, водонагреватели. , торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, контрольно-измерительные приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Бытовая техника
- Водонагреватели и горелки
- Торговые автоматы
- Морозильные и холодильные витрины
- Финансовые терминалы (банкоматы), разменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Чистые помещения
- Оптические изделия
- Принтеры
- Копировальные аппараты
- Медицинское оборудование
- Офисное оборудование
- Системы лабораторного анализа
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции.
