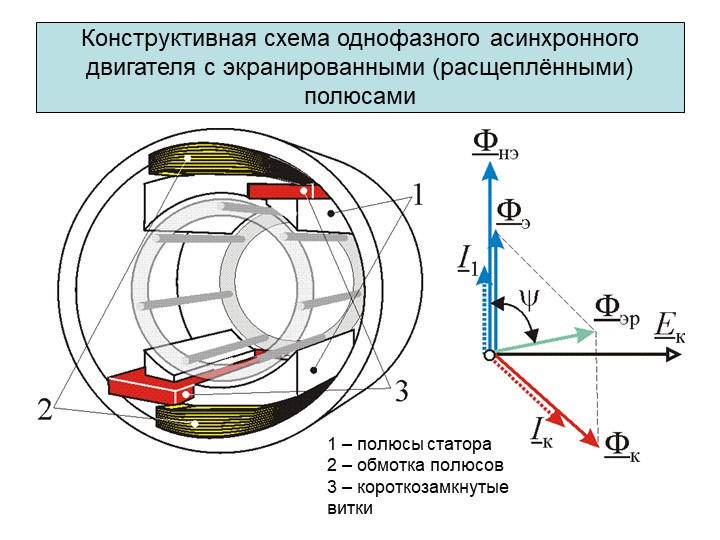
Как устроен асинхронный электродвигатель. Каков принцип его работы. Какие преимущества и недостатки имеет асинхронный двигатель. Где применяются асинхронные электродвигатели.
Конструкция асинхронного электродвигателя
Асинхронный электродвигатель состоит из следующих основных частей:
- Статор — неподвижная часть двигателя
- Ротор — вращающаяся часть
- Подшипниковые щиты
- Вал
- Вентилятор охлаждения
- Клеммная коробка
Статор представляет собой полый цилиндр, собранный из тонких стальных пластин. В пазах статора размещена трехфазная обмотка, состоящая из медных проводников. Ротор располагается внутри статора на небольшом воздушном зазоре (0,3-1 мм). Он может быть короткозамкнутым или фазным.
Принцип работы асинхронного электродвигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора. Рассмотрим пошагово, как это происходит:

- При подаче трехфазного напряжения на обмотку статора создается вращающееся магнитное поле
- Это поле пересекает проводники обмотки ротора и индуцирует в них ЭДС
- Под действием ЭДС в обмотке ротора возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает электромагнитный момент
- Под действием момента ротор начинает вращаться вслед за полем статора
Частота вращения ротора всегда меньше частоты вращения поля статора. Эта разница называется скольжением. Именно поэтому двигатель называется асинхронным.
Виды асинхронных электродвигателей
Существует два основных типа асинхронных электродвигателей:
1. С короткозамкнутым ротором
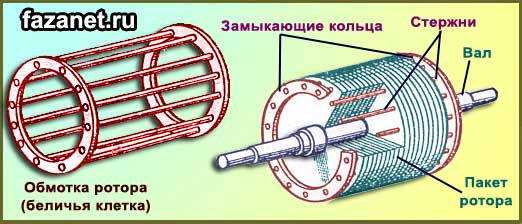
Обмотка ротора выполнена в виде «беличьей клетки» — алюминиевых стержней, замкнутых по торцам кольцами. Простая и надежная конструкция.
2. С фазным ротором
На роторе размещена трехфазная обмотка, выведенная на контактные кольца. Позволяет регулировать пусковые характеристики двигателя.Преимущества асинхронных двигателей
Асинхронные электродвигатели обладают рядом важных достоинств:

- Простота конструкции
- Высокая надежность
- Низкая стоимость
- Легкость в обслуживании
- Возможность работы напрямую от сети
- Высокий КПД (до 95%)
Благодаря этим преимуществам асинхронные двигатели получили самое широкое распространение в промышленности и быту.
Недостатки асинхронных электродвигателей
У асинхронных двигателей есть и некоторые недостатки:
- Сложность регулирования скорости вращения
- Относительно небольшой пусковой момент
- Низкий коэффициент мощности при малой нагрузке
- Большой пусковой ток (5-7 кратный номинальному)
Однако в большинстве применений эти недостатки не являются критичными.
Применение асинхронных электродвигателей
Асинхронные двигатели широко используются во многих отраслях:
- Промышленные станки и оборудование
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортные механизмы
- Бытовая техника (стиральные машины, холодильники)
- Электроинструмент
- Сельскохозяйственная техника
По некоторым оценкам, на асинхронные двигатели приходится до 80% всех электродвигателей, используемых в мире.
Регулирование скорости асинхронных двигателей
Существует несколько способов изменения частоты вращения асинхронного электродвигателя:
- Изменение частоты питающего напряжения с помощью частотного преобразователя
- Изменение числа пар полюсов статора
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
- Изменение величины питающего напряжения
Наиболее эффективным и распространенным является частотное регулирование с помощью преобразователей частоты.
Выбор асинхронного электродвигателя
При выборе асинхронного двигателя необходимо учитывать следующие параметры:
- Мощность
- Частота вращения
- Напряжение питания
- Режим работы (продолжительный, повторно-кратковременный)
- Условия эксплуатации (температура, влажность, запыленность)
- Способ монтажа
- Степень защиты
Правильный выбор двигателя обеспечит его надежную и эффективную работу в составе привода.
Техническое обслуживание асинхронных двигателей
Для обеспечения длительной и безотказной работы асинхронного электродвигателя необходимо проводить его регулярное обслуживание:
- Очистка от пыли и грязи
- Проверка состояния подшипников
- Контроль сопротивления изоляции обмоток
- Измерение вибрации
- Проверка надежности крепления
- Смазка подшипников (если предусмотрено конструкцией)
Своевременное обслуживание позволит существенно продлить срок службы двигателя и предотвратить аварийные ситуации.
Заключение
Асинхронные электродвигатели являются наиболее распространенным типом электрических машин благодаря своей простоте, надежности и низкой стоимости. Понимание принципов их работы и особенностей конструкции позволяет эффективно применять эти двигатели в различных отраслях промышленности и быту. Несмотря на появление новых типов электродвигателей, асинхронные машины еще долго будут сохранять свои лидирующие позиции.
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Содержание:
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.
Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.
Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусматривает использование дополнительной обмотки, но подключается она последовательно с основной. Это позволяет при необходимости резко увеличить крутящий момент двигателя, к примеру, на старте движения железнодорожного состава.
- Смешанная схема использует преимущества обоих способов подключения, описанных выше.
Биполярный электрический двигатель
Двигатели переменного тока
Главным отличием этих двигателей от описанных ранее моделей заключается в токе, протекающем по их обмотке. Он описывает по синусоидальному закону и постоянно меняет свое направление. Соответственно и питание этих двигателей осуществляется от генераторов со знакопеременной величиной.
Одним из главных конструктивных отличий является устройство статора, представляющего собой магнитопровод со специальными пазами для расположения витков обмотки.
Двигатели переменного тока классифицируют по принципу работы на синхронные и асинхронные. Коротко говоря, это означает, что в первых частота вращения ротора совпадает с частотой вращения магнитного поля в статоре, а во вторых – нет.
Настоятельно рекомендуем прочитать нашу статью об устройстве электродвигателей переменного тока.
Синхронные двигатели
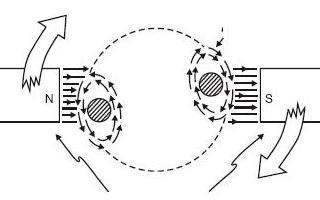
В основе работы синхронных электродвигателей переменного тока тоже лежит принцип взаимодействия полей, возникающих внутри устройства, однако в их конструкции постоянные магниты закрепляются на роторе, а по статору проводится обмотка. Принцип их действия демонстрирует следующая схема:
Проводники обмотки, по которой проходит ток, показанные на рисунке в виде рамки. Вращение ротора происходит следующим образом:
- На определенный момент времени ротор с закрепленным на нем постоянным магнитом находится в свободном вращении.
- На обмотке в момент прохождения через нее положительной полуволны формируется магнитное поле с диаметрально противоположными полюсами Sст и Nст. Оно показано на левой части приведенной схемы.
- Одноименные полюса постоянного магнита и магнитного поля статора отталкиваются друг от друга и приводят двигатель в положение, показанное на правой части схемы.
В реальных условиях для создания постоянного плавного вращения двигателя используется не одна катушка обмотки, а несколько. Они поочередно пропускают через себя ток, благодаря чему создается вращающееся магнитное поле.
Асинхронные двигатели
А асинхронном двигателе переменного тока вращающееся магнитное поле создается тремя (для сети 380 В) обмотками статора. Их подключение к источнику питания осуществляется через клеммную коробку, а охлаждение — вмонтированным в двигатель вентилятором.
Ротор, собранный из нескольких замкнутых между собой металлических стержней, жестко соединен с валом, составляя с ним одно целое. Именно из-за соединения стержней межу собой этот тип ротора называется короткозамкнутым. Благодаря отсутствию токопроводящих щеток в данной конструкции значительно упрощается техническое обслуживание двигателя, увеличивается срок службы и надежность. Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Принцип работы асинхронного двигателя основывается на законе электромагнитной индукции – если частота вращения электромагнитного поля обмоток статора превышает частоту вращения ротора, в нем наводится электродвижущая сила. Это важно, поскольку при одинаковой частоте ЭДС не возникает и, соответственно, не возникает вращения. В действительности нагрузка на вал и сопротивление от трения подшипников всегда замедляет ротор и создает достаточные для работы условия.
Главным недостатком двигателей данного типа является невозможность получения постоянной частоты вращения вала. Дело в том, что рабочие характеристики устройства изменяются в зависимости от различных факторов. К примеру, без нагрузки на вал циркулярная пила вращается с максимальной скоростью. Когда мы подводим к пильному полотну доску и начинаем её резать, частота вращения диска заметно снижается. Соответственно, снижается и скорость вращения ротора относительно электромагнитного поля, что приводит к наведению еще большей ЭДС. Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Принцип работы электрического мотора
Важно подбирать двигатель подходящей мощности – слишком низкая приведет к повреждению короткозамкнутого ротора из-за превышения расчетного максимума ЭДС, а слишком высокая приводит к необоснованным энергозатратам.
Асинхронные двигатели переменного тока рассчитаны на работу от трехфазной электрической сети, однако могут быть подключены и в однофазную сеть. Так, например, они используются в стиральных машинах и станках для домашних мастерских. Однофазный двигатель имеет примерно на 30% более низкую мощность, по сравнению с трехфазным – от 5 до 10 кВт.
Ввиду простоты исполнения и надежности асинхронные двигатели переменного тока наиболее распространены не только в производственном оборудовании, но и в бытовой технике.
Универсальные коллекторные двигатели
Во многих бытовых электроприборах необходимо наличие высокой скорости вращения двигателя и крутящего момента при малых пусковых токах и плавной регулировке. Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Главным отличием от ДПТ является магнитная система, комплектуемая несколькими изолированными друг от друга листами электротехнической стали, к полюсам которых подсоединены по две секции обмотки. Такая конструкция снижает нагрев элементов токами Фуко и перемагничивание.
Высокая синхронность магнитных полей в универсальных коллекторных двигателях сохраняет высокую скорость вращения даже под большой нагрузкой на вал. Поэтому их используют в маломощном быстроходном оборудовании и домашней технике. При подключении в цепь регулируемого трансформатора появляется возможность плавной настройки частоты вращения.
Главный недостаток таких электромоторов заключается в низком моторесурсе, обусловленном быстрым стиранием графитовых щеток.
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Принцип работы асинхронного двигателя
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателя
Направление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
//www.youtube.com/embed/hu9TaxRe2UE?feature=player_detailpage
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет.
Формула, из которой следует, что электрические машины переменного тока двухфазного или однофазного типа должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателя
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепления
Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Трехфазный асинхронный двигатель
Трехфазный асинхронный электродвигатель — это асинхронный электродвигатель, который имеет трехфазную обмотку статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором — это асинхронный электродвигатель, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки [1].
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор асинхронного двигателяРотор асинхронного двигателя
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Корпус и сердечник статора асинхронного электродвигателяКонструкция шихтованного сердечника асинхронного двигателя
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
ЗагрузкаВращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
, где n1 – частота вращения магнитного поля статора, об/мин, f1 – частота переменного тока, Гц, p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
ЗагрузкаМагнитное поле прямого проводника с постоянным токомМагнитное поле создаваемое обмоткой
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времениТок протекающий в витках электродвигателя (сдвиг 60°)ЗагрузкаВращающееся магнитное поле
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Вращающееся магнитное поле пронизывающее короткозамкнутый роторМагнитный момент действующий на ротор
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2, где s – скольжение асинхронного электродвигателя, n1 – частота вращения магнитного поля статора, об/мин, n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
 Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.

Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.

Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Читайте также статьи:
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.

Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
 Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
 Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
 В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
принцип работы и устройство :: SYL.ru
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.

Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
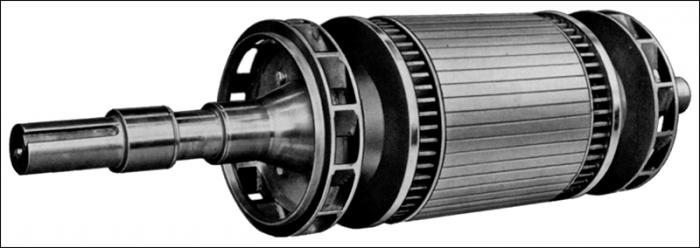
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.

У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».

На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.

Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи

Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Список производителей электродвигателей
Области применения
Электродвигатели переменного и постоянного тока имеют одно общее применение — силовые установки. В этом контексте машинным оборудованием может быть что угодно, от полуприцепа до электрической зубной щетки.
Электродвигатели приводятся в действие в бесчисленных отраслях промышленности, включая электронику, строительство, товары для дома и офиса, бытовую технику (двигатели смесителей, двигатели холодильников и т. Д.).), автомобилестроение, транспорт и промышленное производство. Самые крупные электродвигатели используются для таких применений, как сжатие трубопроводов, судовая тяга и насосное хранилище, в то время как самые маленькие электродвигатели могут помещаться в электрические часы.
История
Электродвигатели начали свое существование в 1740-х годах, когда шотландский монах по имени Эндрю Гордон создал первое электростатическое устройство. Около 60 лет спустя, в 1820 году, французский физик Андре-Мари Ампер открыл, как можно создавать механическую силу, облегчая взаимодействие между двумя токонесущими проводами.Он записал этот принцип, и позже он стал известен как Закон силы Ампера. От его имени мы также получили базовую единицу измерения электрического тока СИ, ампер или ампер.
Через год после того, как Ампер открыл закон силы Ампера, британский ученый Майкл Фарадей успешно провел эксперименты, демонстрирующие этот принцип. Сначала он окунул проволоку в ртуть и прикрепил к ней постоянный магнит. Затем он пропустил ток через провод. Когда ток проходил через провод, провод вращался вокруг магнита.Это доказало то, что ток создавал круговое магнитное поле вокруг провода. В 1822 году человек по имени Питер Барлоу провел аналогичный, но обновленный эксперимент. Во время своего эксперимента он вращал кончики звездообразного колеса (колеса Барлоу) в ртути, когда оно вращалось. Его результаты эксперимента перекликаются с результатами Фарадея.

Бесщеточный двигатель постоянного тока — Решения для электрических двигателей
Подобные эксперименты установили определенные принципы, такие как электромагнитная индукция, которые впоследствии ученые и инженеры могли использовать в качестве отправной точки.Например, в 1827 году венгерский священник и ученый Аньос Едлик построил первый узнаваемый электродвигатель — он содержал ротор, статор и коммутатор. Несколько лет спустя он построил модель автомобиля, который работал на электромоторе. В 1832 году британский ученый Уильям Стерджен построил первый электродвигатель постоянного тока. В 1834 году американский кузнец Томас Давенпорт изобрел электромотор на батарейках, с помощью которого он приводил в движение маленькие модели автомобилей на гусеницах. Спустя три года Давенпорт и его жена Эмили запатентовали конструкцию первого электродвигателя, который можно было бы использовать в коммерческих целях.В 1840 году он использовал свой электродвигатель для питания станков и печатного станка, чтобы напечатать свою собственную газету по механике. Это была первая газета, напечатанная с использованием электроэнергии. Изобретения Давенпорта были гениальными, но поскольку батареи еще не были экономически жизнеспособными, он обанкротился.
Примерно в это же время немецкий физик и инженер Мориц фон Якоби создал вращающийся электродвигатель, с помощью которого он мог приводить в действие небольшую электрическую лодку через реку.В 1871 году бельгийский инженер-электрик по имени Зеноб Грамм построил первый двигатель постоянного тока, который заработал любые деньги. В 1887 году Никола Тесла изобрел двигатель переменного тока, продукт, который использует переменный ток и не требует коммутатора. Примерно в это же время, в 1886 году, американец Фрэнк Дж. Спрэг изобрел первый неискрящий двигатель постоянного тока, который мог продолжать движение с одинаковой скоростью, независимо от нагрузки. Между 1887 и 1888 годами Спрэг изобрел электрические тележки, которые инженеры впервые применили в Ричмонде, штат Вирджиния.В 1892 году он изобрел электрический лифт и спроектировал чикагскую систему L, более формально известную как южная сторона.
В течение 20-го века электродвигатели изменили мир. Они сократили рабочую силу повсюду, от завода до дома, они сделали машины более эффективными, они повысили уровень жизни, позволили производить более качественные продукты и расширили возможности путешествий. Сегодня электродвигатели являются неотъемлемой частью нашей жизни.
Design
При выборе или проектировании изделий для двигателей, изготовленных на заказ, производители электродвигателей будут учитывать различные аспекты вашего применения, в том числе то, насколько быстро вы хотите, чтобы ваш двигатель работал, как часто вы будете его использовать, условия, в которых вы работаете. будет использовать его и загружать детали (вес, местоположение и т. д.). Основываясь на этих факторах, они будут выбирать мощность переменного тока в зависимости от мощности постоянного тока, мощность / ватт (выходная мощность), об / мин (число оборотов в минуту), изменчивость скорости в зависимости от фиксированной скорости вращения и номинальные значения тока.Производители также могут варьировать ваши продукты электродвигателя по количеству роторов и магнитных полюсов статора и размеров. Узнайте больше, обратившись к заявке с потенциальными поставщиками.
Особенности
Компоненты
Вообще говоря, электродвигатели состоят из ротора, статора, обмоток, воздушного зазора и коммутатора.
Ротор
В этом контексте ротор представляет собой движущуюся деталь, которая выдает механическую энергию при движении вала.Для достижения этого вращательного движения ротор обычно имеет встроенные токонесущие проводники, которые взаимодействуют с магнитным полем, создаваемым статором. Однако в некоторых случаях ротор несет магниты, в то время как статор удерживает проводники.
Статор
В отличие от ротора, статор не движется. Скорее, это фиксированный компонент электромагнитной цепи двигателя. Как правило, он состоит из сердечника и постоянных магнитов или обмоток. Этот сердечник состоит из нескольких тонких металлических листов, называемых ламинациями, которые используются для уменьшения потерь энергии.
Обмотки
Обмотки — это спиральные провода. Когда они намотаны вокруг сердечника и после того, как на них подается ток, целью этих катушек является формирование магнитных полюсов.
Воздушный зазор
Далее воздушный зазор — это расстояние между ротором и статором. Воздушный зазор обеспечивает большую часть низкого коэффициента мощности, при котором работают двигатели, увеличивая и уменьшая ток намагничивания по мере необходимости. Таким образом, поскольку большой воздушный зазор оказывает сильное негативное влияние на производительность двигателя и может представлять механические проблемы, потери и шум, воздушный зазор должен быть как можно меньше.
Коммутатор
Наконец, коммутатор является частью, используемой для периодического переключения направления тока между внешней цепью и ротором. Он используется с большинством двигателей постоянного тока и с универсальными двигателями. Коммутатор состоит из цилиндра, состоящего из нескольких металлических контактов или контактных колец, сегментов и якоря, на котором вращаются сегменты. Два или более электрических контакта, называемых щетками, создают скользящий контакт с сегментами, прижимаясь к ним при их повороте, позволяя току протекать через них и достигать ротора.
Конфигурации
Все электродвигатели имеют две основные конфигурации полюсов магнитного поля, из которых можно выбирать: выступающий полюс и не выступающий полюс.
выступающий полюс
Магнитное поле машины с выступающими полюсами создается обмоткой, намотанной ниже поверхности полюса.
Поляка не выступающего типа
В случае машины с несимметричным полюсом, также известной как машина с круглым ротором или распределенная полевая машина, обмотки создают магнитное поле при намотке вокруг пазов на полюсной поверхности.
Затененный полюс
Конфигурация третьего полюса, заштрихованный полюс, задерживает фазу магнитного поля полюса. Для этого требуется обмотка, состоящая из медного стержня или кольца, называемого шейдинговой катушкой, которая проходит вокруг определенной части этого полюса.
Типы
Типы по источнику тока
Двигатели переменного тока питаются от переменного тока. Переменные токи, которые движутся через катушки, создают вращающееся магнитное поле, которое, в свою очередь, обеспечивает крутящий момент на выходном валу.Они не требуют коммутатора. Обычные источники переменного тока включают в себя инверторы, генераторы и электрические сети.
Двигатели постоянного тока получают питание от постоянного тока. Напряжение, создаваемое токами, вызывает вращение обмотки якоря, в то время как невращающаяся обмотка поля якоря действует как постоянный магнит. Пользователи двигателей постоянного тока могут управлять своей скоростью, регулируя ток в полевой рамке или изменяя приложенное напряжение. Постоянные токи часто выдают выпрямители, электромобили и аккумуляторы.
Универсальные двигатели могут работать как с переменным, так и с постоянным током.
Типы по внутренней конструкции
Матовые двигатели , иногда называемые коммутируемыми электродвигателями, являются одним из двух основных типов электродвигателей, которые классифицируются по внутренней конструкции. Матовые двигатели, которые почти всегда используют постоянный ток, получают свое название от коммутатора, который поставляется с несколькими щетками. Эти щетки всегда сделаны из мягкого проводящего материала; почти исключительно производители используют углерод, иногда с добавлением медного порошка для улучшения проводимости.Пятью основными типами щеточных двигателей являются двигатели с отдельным возбуждением, намотанные электродвигатели постоянного тока, двигатели постоянного тока с постоянными магнитами, составные двигатели постоянного тока и шунтирующие двигатели постоянного тока.
Бесщеточные двигатели намного более эффективны, чем щеточные, и быстро заменяют их. В этих двигателях вместо щеток используются датчики, известные как датчики эффекта Холла, для передачи тока. Они состоят из трехфазной катушки, внешнего ротора с постоянными магнитами, приводной электроники и датчика.Трехфазная катушка — это элемент двигателя, который относится к другому типу классификации двигателя, основанной на средствах движения двигателя.
В редукторных двигателях используются редукторы для изменения скорости.
Электродвигатели ступицы — это двигатели, встроенные в ступицу колеса. Они напрямую управляют колесом.
Типы по средствам движения
Наиболее распространенные классификации движений двигателя включают трехфазные двигатели, однофазные двигатели, линейные двигатели, шаговые двигатели и двигатели 12 В.
Трехфазные электродвигатели отличаются довольно простой конструкцией и высокой эффективностью. Обычно асинхронный двигатель 3-фазного двигателя работает с использованием трех переменных токов, которые распределяют преобразованную механическую энергию.
Однофазные двигатели являются еще одним примером асинхронного двигателя. На этот раз они используют однофазный или однофазный источник питания двигателя, который обычно является переменным током.
Линейные двигатели обеспечивают механическую энергию по прямой или линейной линии.Другими словами, линейные двигатели обеспечивают движение в одной плоскости.
Шаговые двигатели очень похожи на 3-фазные синхронные двигатели. Основное различие между ними состоит в том, что, хотя 3-фазные синхронные двигатели вращаются непрерывно, шаговые двигатели должны непрерывно запускаться и останавливаться. Шаговые двигатели широко распространены в 3D-принтерах и роботах.
12-вольтовые двигатели генерируют движение, используя двенадцать вольт электроэнергии, что является стандартным.
Типы по методу преобразования энергии
Наконец, электродвигатели преобразуют энергию по-разному.Таким образом, двигатели делятся на синхронные, асинхронные, электростатические и серводвигатели.
Синхронные двигатели — это тип двигателя переменного тока. Они преобразуют напряжение в энергию, используя проходящий ток и ротор, которые движутся с одинаковой скоростью. Вместе эти элементы создают вращающееся магнитное поле. Синхронные двигатели обладают способностью поддерживать постоянные скорости при изменении крутящего момента.
Асинхронные двигатели , иногда называемые асинхронными двигателями, работают по принципу электромагнитной индукции.По сути, они работают, когда электрический проводник движется через магнитное поле и впоследствии создает напряжение. Асинхронные двигатели дешевле, чем синхронные двигатели.
Электростатические двигатели работают, используя притяжение и отталкивание электрического заряда. Они обычно используют много энергии, но они доступны в виде небольших моделей, которые используют более низкие напряжения. Например, небольшие электростатические двигатели являются общими компонентами микромеханических систем (MEMS).
Серводвигатели работают с использованием сервомеханизмов (сервоприводов), которые распознают ошибки и исправляют их автоматически.Они также имеют встроенные микроконтроллеры, которые позволяют пользователям предлагать им перемещать точное количество градусов в любое время. Серводвигатели исключительно малы. Они распространены в роботизированных приводах, автомобилях с дистанционным управлением и самолетах для хобби.
Принадлежности
Электродвигатели имеют множество аксессуаров. Примеры распространенных принадлежностей электродвигателей включают в себя фазовые преобразователи (используемые для преобразования мощности переменного тока в мощность постоянного тока и наоборот), подшипники, крышки вентиляторов, комплекты электродвигателей, монтажные комплекты, щитки от дождя, комплекты тормозов, пульты дистанционного управления, регуляторы скорости / напряжения и кабельные коробки.
Стандарты
В Соединенных Штатах одним из наиболее важных стандартов, связанных с электродвигателями, являются стандарты NEMA или Национальной ассоциации производителей электрооборудования. NEMA назначает стандартизированные размеры для разных двигателей, которые вы можете просмотреть на графиках, которые они отправляют производителям. Другие стандартные требования связаны с вашей отраслью, областью применения и местоположением. Узнайте стандарты, которым должны соответствовать ваши электродвигатели, поговорив с лидерами отрасли.
Что нужно учитывать
Если вы ищете электродвигатель, первое, что вам нужно сделать, это убедиться, что вы знаете свои спецификации. Мы рекомендуем, прежде чем звонить любым производителям, перечислить все, что вы ищете (или не ищете), включая сведения о вашем приложении, ваш бюджет, срок доставки, ваши предпочтения после доставки (помощь при установке, техническая поддержка и т. Д.) .) и ваши стандартные требования. Подробное обсуждение этих вопросов с компанией, занимающейся электродвигателями, поможет вам понять, подходите ли вы друг другу.
Чтобы найти подходящую модель, посмотрите на производителей высокого качества, перечисленных на этой странице. Просмотрите их профили и веб-страницы, чтобы увидеть, могут ли они работать на вас. Выберите трех или четырех главных претендентов, а затем позвоните им, чтобы рассказать о вашем заявлении. После того, как вы поговорите с каждым из них, сравните и сопоставьте свои разговоры и выберите тот, который, по вашему мнению, предложит вам лучший сервис в рамках вашего бюджета и сроков. Удачи!
Информационный видеоролик по электродвигателю
.Электродвигатель — Edison Tech Center
электродвигатель был впервые разработан в 1830-х годах, спустя 30 лет после первая батарея. Интересно, что мотор был разработан до первого динамо или генератор.|
выше: Первый мотор Давенпорт |
1.) История и изобретатели:1834 — Томас Давенпорт Вермонта разработал первый настоящий электрический двигатель («настоящий» смысл достаточно мощный, чтобы выполнить задание) хотя Иосиф Генри и Майкл Фарадей создал устройства раннего движения с использованием электромагнитных полей. Ранние «моторы» создавали вращающиеся диски или рычаги, которые качал взад и вперед. Эти устройства не могли сделать какую-либо работу для человечества но были важны для того, чтобы проложить путь к лучшим двигателям в будущемРазличные моторы Давенпорта были в состоянии запустить модель тележки на круговой дорожке и другие задачи. Тележка позже оказалась первым важным приложением электроэнергии (это была не лампочка). зачаточный полноразмерные электрические тележки наконец были построены через 30 лет после смерти Давенпорта в 1850-х годах. Мировое влияние электродвигателя перед лампочками:
Только в 1873 году электродвигатель наконец достиг коммерческого успеха. С 1830-х годов тысячи инженеров-новаторов усовершенствовали двигатели и создали много вариаций. Смотрите другие страницы для более подробной информации об обширной истории электродвигателя. |
после слабые электродвигатели были разработаны Фарадеем и Генри, другой ранний пионер по имени Ипполит Pixii выяснил, что, запустив двигателем назад он мог создавать импульсы электричества. К 1860-м годам разрабатывались мощные генераторы. Электротехническая промышленность не могла начаться до генераторы были разработаны, потому что батареи не были экономичным способом питания потребности общества.Читать о генераторах и динамо здесь>
2) Как работают моторыЭлектродвигатели могут получать питание от переменного (переменного) тока или постоянного тока (постоянного тока). Двигатели постоянного тока были разработаны в первую очередь и имеют определенные преимущества и недостатки. Каждый вид моторных работ по-разному, но все они используют силу электромагнитного поля.Мы поговорим о самых основных принципах электромагнитных полей в двигателях, прежде чем вы можете перейти к различным типам двигателей. AC В электродвигателях используется вторичная и первичная обмотка (магнит), первичная подключен к сети переменного тока (или непосредственно к генератору) и находится под напряжением. Вторичный получает энергию от первичного без непосредственного прикосновения к нему. Это делается с помощью сложные явления, известные как индукция. Справа: инженер работает над пользовательскими модификациями беспилотного вертолета. Восемь крошечных DC Моторы создают достаточно мощности, чтобы поднять фунты полезной нагрузки. Более новые конструкции двигателя, такие как это использование редкоземельные металлы в статоре для создания более сильных магнитных полей в меньших, более легких пакеты. |
| выше: универсальный двигатель, обычно встречающийся в большинстве электроинструментов.Имеет тяжелый плотный ротор. | выше: асинхронный двигатель может иметь «короткозамкнутый» или полый вращающийся катушка или тяжелая арматура. |
2.a) Детали электродвигателя:
Существует много видов электродвигателей, но в целом они имеют несколько похожих деталей. Каждый мотор имеет статор , который может быть постоянным магнитом (как показано на «универсальном двигателе» выше) или намотанными поврежденными проводами (электромагнит как на фото выше справа).Ротор находится посередине (большую часть времени) и является предметом в магнитное поле созданный статором. Ротор вращается, поскольку его полюса притягиваются и отталкиваются полюсами в статоре. Смотрите наши видео ниже, показывающее, как это работает. Это видео рассказывает о бесщеточном двигателе постоянного тока, где ротор находится снаружи, в других двигателях. тот же принцип обратный, с электромагнитами снаружи. Видео (1 минута):
Сила мотора:
Сила двигателя (крутящий момент) определяется напряжением и
длина провода в электромагните в статоре,
Чем длиннее провод (что означает больше катушек в статоре), тем сильнее магнитное поле.Это означает больше силы для
поверните ротор. Смотрите наше видео, которое относится как к генераторам, так и к двигателям.
Узнать больше.
Арматура — вращающаяся часть двигателя — это раньше называлось ротором, это поддерживает вращающиеся медные катушки. На фото ниже вы не видите катушки, потому что они плотно заправлены в арматуру. Гладкий Корпус защищает катушки от повреждений.
Статор — Корпус и катушки, которые составляют внешнюю часть двигателя. Статор создает стационарное магнитное поле.
выше: В этом статоре отчетливо видны четыре отдельные катушки (арматура была удалено)
обмотки или «Катушка» — медные провода, намотанные вокруг сердечника, для создания или получить электромагнитную энергию.
Проволока используется в обмотки ДОЛЖНЫ быть изолированы. На некоторых фотографиях вы увидите, что выглядит как обмотки из медной проволоки, это не так, это просто эмалированный с прозрачным покрытием.
Медь является наиболее распространенным материалом для обмоток. Алюминий также используется но должен быть толще, чтобы нести тот же электрический загрузить безопасно.Медные обмотки позволяют двигатель меньшего размера. Подробнее о меди>
Выгорание двигателя, устранение неисправностей:
Если двигатель работает слишком долго или на чрезмерной скорости
нагрузка может «сгореть». Это означает, что высокая температура вызвала
изоляция обмотки, чтобы сломаться или расплавиться, обмотки затем короткие
когда они касаются и двигатель поврежден. Вы также можете сжечь двигатель, подведя к нему больше напряжения, чем
провода обмотки рассчитаны на.В этом случае провод тает в самой слабой точке, разрывая соединение. Ты можешь
Проверьте двигатель, чтобы проверить, не сгорел ли он таким образом, проверив сопротивление (сопротивление) на мультиметре.
В общем, вы хотите искать черные пятна на обмотках при проверке двигателя.
Squirrel Cage — вторая катушка в асинхронном двигателе, см. Ниже
чтобы увидеть, как это работает
Индукция — генерация электродвижущей силы в замкнутом
цепь через переменный магнитный поток через цепь.В сети переменного тока
уровень мощности идет вверх и вниз, это заряжает обмотку для
момент создания магнитного поля. Когда мощность падает в цикле
магнитное поле не может быть устойчивым, и оно разрушается. Это действие
передает энергию через магнетизм в другую обмотку или катушку. УЧИТЬСЯ
Подробнее об индукции здесь.
3.) Типы электродвигателей переменного тока
|
3.а) индукция
Двигатель
3.b) Универсальный двигатель (может использовать постоянный или переменный ток)
3.c) Синхронные двигатели
3.d) Двигатели с затененными полюсами
Смотрите нашу страницу, посвященную асинхронному двигателю здесь>
Это мощный двигатель, который можно использовать с и переменного и постоянного тока.
Преимущества :
-Высокий пусковой крутящий момент и небольшой размер (подходит для общего использования в
электроинструменты для потребителей)
-Может работать на высоких скоростях (отлично подходит для стиральных машин и электрических дрелей)
Недостатки:
— Щетки со временем изнашиваются
Использует: приборы, ручные электроинструменты
см видео ниже:
|
Этот мотор похож на асинхронный двигатель за исключением того, что он движется с частотой линии.
Selsyn Motor был разработан в 1925 году и теперь известен как Synchro. Узнать больше о их здесь.
Преимущества: Обеспечивает постоянную скорость, которая определяется
количество полюсов и частота переменного тока.
Недостатки: Не может справиться с переменным крутящим моментом, этот двигатель будет
остановить или «вытащить» с заданным моментом.
Использует: Часы
использует синхронные двигатели, чтобы обеспечить точную скорость вращения для
Руки. Это двигатель с аналогом , и в то время как скорость точна,
Несколько слов об электроприводах
Почти все современные промышленные и коммерческие предприятия используют электрический привод вместо механического привода, поскольку он обладает следующими преимуществами:
 12 основных типов двигателей, используемых для промышленных электроприводов (фото: DOE Navigant Master Presentation)
12 основных типов двигателей, используемых для промышленных электроприводов (фото: DOE Navigant Master Presentation)
- Прост в конструкции и имеет меньшие затраты на обслуживание.
- Легко и плавно регулирует скорость
- Чистый, чистый, без дыма и дымовых газов.
- Его можно установить в любом удобном месте, что обеспечивает большую гибкость компоновки .
- Может дистанционно управляться
- Будучи компактным, он требует меньше места
- Может быть запущен сразу, без потери времени.
- имеет сравнительно более длительный срок службы.
Однако у системы электропривода есть два присущих им недостатка:
- Останавливается, как только происходит сбой электроснабжения и
- Не может использоваться в удаленных местах, которые не обслуживаются электроснабжением.
Тем не менее, вышеупомянутые два недостатка могут быть преодолены путем установки дизельных генераторов постоянного тока и трехфазных генераторов с турбинным приводом, которые могут использоваться либо при отсутствии, либо при сбое нормального электроснабжения.
Типы двигателей для промышленных электроприводов
Хорошо, давайте кратко рассмотрим двенадцать основных типов двигателей, используемых для различных промышленных электроприводов:
- DC Series Motor
- DC Shunt Motor
- кумулятивный составной двигатель
- Трехфазный синхронный двигатель
- Асинхронный двигатель с короткозамкнутым ротором
- Двигатель с двумя короткозамкнутыми роторами
- Кольцо скольжения Асинхронный двигатель
- Однофазный синхронный двигатель
- Однофазный двигатель серии
- Мотор отталкивания
- Конденсаторный запуск Асинхронный двигатель Мотор
- Конденсатор запуска и запуска двигателя
1.Двигатель серии DC
Поскольку у него высокий пусковой крутящий момент и переменная скорость , он используется для тяжелых условий эксплуатации , таких как электровозы, стальные прокатные станы, подъемники, подъемники и краны.
Вернуться к типам двигателей ↑
2. Шунтирующий двигатель постоянного тока
Имеет средний пусковой момент и почти постоянную скорость.
Шунтирующий двигатель постоянного токаиспользуется для привода валов с постоянной скоростью, токарных станков, пылесосов, деревообрабатывающих машин, стиральных машин, лифтов, конвейеров, шлифовальных машин, небольших печатных машин и т. Д.
Вернуться к типам двигателей ↑
3. Кумулятивный составной двигатель
Кумулятивный составной двигатель — это двигатель переменной скорости с высоким пусковым моментом , который используется для привода компрессоров, центробежных насосов с переменной головкой, роторных прессов, дисковых пил, раскройных машин, элеваторов, конвейеров непрерывного действия и т. Д.
Вернуться к типам двигателей ↑
4. Трехфазный синхронный двигатель
Поскольку его скорость остается постоянной при различных нагрузках , 3-фазный синхронный двигатель используется для привода постоянно работающего оборудования с постоянной скоростью, такого как аммиачные и воздушные компрессоры, мотор-генераторные установки, непрерывные прокатные станы, бумажная и цементная промышленность.
Вернуться к типам двигателей ↑
5. Асинхронный двигатель с короткозамкнутым ротором
Этот двигатель довольно простой, но прочный и обладает высокой перегрузочной способностью. Имеет почти постоянную скорость и плохой пусковой момент.
Асинхронный двигатель с короткозамкнутым ротором используется для приводов малой и средней мощности , где управление скоростью не требуется, как для водяных насосов, трубчатых колодцев, токарных станков, сверл, шлифовальных станков, полировщиков, строгальных станков, вентиляторов, воздуходувок, стиральных машин и компрессоров и т. Д. ,
Вернуться к типам двигателей ↑
6. Двигатель с двумя короткозамкнутыми роторами
Обладает высоким пусковым моментом, большой перегрузочной способностью и почти постоянной скоростью.
Двигатель с двойной короткозамкнутой клеткой используется для привода нагрузок, требующих высокого пускового момента, таких как компрессорные насосы, поршневые насосы, большие холодильники, дробилки, расточные станки, текстильные машины, краны, пуансоны и токарные станки и т. Д.
 Двигатель вентилятора с двойной короткозамкнутой клеткой — 3 скорости; 110V
Двигатель вентилятора с двойной короткозамкнутой клеткой — 3 скорости; 110V
Вернуться к типам двигателей ↑
7.Асинхронный двигатель с контактным кольцом
Обладает высоким пусковым моментом и большой перегрузочной способностью. Скорость асинхронного двигателя с контактным кольцом может быть изменена до 50% от его нормальной скорости.
Асинхронный двигатель с контактным кольцом используется для тех промышленных приводов, которые требуют высокого пускового момента и регулирования скорости , таких как подъемники, насосы, намоточные машины, печатные машины, линейные валы, подъемники и компрессоры и т. Д.
 Асинхронный двигатель с контактным кольцом 6000 кВт для испытательного стенда компрессора (фото любезно предоставлено emz.де)
Асинхронный двигатель с контактным кольцом 6000 кВт для испытательного стенда компрессора (фото любезно предоставлено emz.де)
Вернуться к типам двигателей ↑
8. Однофазный синхронный двигатель
Благодаря своей постоянной скорости , однофазный синхронный двигатель используется в телепринтерах, часах, всех видах устройств синхронизации, записывающих приборах, системах записи и воспроизведения звука.
 Синхронный двигатель / однофазный / IP65 (фото предоставлено: directindustry.com)
Синхронный двигатель / однофазный / IP65 (фото предоставлено: directindustry.com)
Вернуться к типам двигателей ↑
9. Однофазный двигатель серии
Обладает высоким пусковым моментом, и его скорость может регулироваться в широком диапазоне. Однофазный двигатель серии обычно используется для привода небольших бытовых приборов, таких как холодильники, пылесосы и т. Д.
 Однофазный двигатель серии 1,0 кВт; 1000 Вт; 230 В
Однофазный двигатель серии 1,0 кВт; 1000 Вт; 230 В
Вернуться к типам двигателей ↑
10. Двигатель отталкивания
Обладает высоким пусковым моментом и может регулировать скорость вращения.
Кроме того, он имеет высокую скорость при высоких нагрузках. Мотор отталкивания обычно используется для приводов, которые требуют большого пускового момента и регулируемой, но постоянной скорости, как в машинах с намоткой катушки.
Вернуться к типам двигателей ↑
11. Конденсатор запуска двигателя асинхронного запуска
Имеет довольно постоянную скорость и умеренно высокий пусковой момент. Контроль скорости невозможен. Конденсаторный асинхронный двигатель обычно используется для компрессоров, холодильников и небольших переносных подъемников.
Вернуться к типам двигателей ↑
12. Конденсаторный пуск и запуск двигателя
Его рабочие характеристики аналогичны приведенному выше двигателю за исключением того, что он имеет лучший коэффициент мощности и более высокий КПД .Следовательно, конденсаторные пусковые и работающие двигатели обычно используются для приводов, требующих тихой работы.
 Hitachi конденсатор пуск конденсаторный двигатель
Hitachi конденсатор пуск конденсаторный двигатель
Вернуться к типам двигателей ↑
Справочник // Справочник ASHRAE: Системы отопления, вентиляции и кондиционирования 2004
,business Отраслевая информация
Электродвигатели
Электродвигатель — это устройство, которое преобразует электрическую энергию в механическую. Для электродвигателя электроэнергия от батареи или сети вводится в двигатель, а механическая энергия выводится в виде вращающегося вала.
Электродвигатели, которые когда-то были просто научной игрушкой, сегодня можно найти во всем — от электроинструментов до лифтов, зубных щеток и игрушек.Даже автомобиль с бензиновым двигателем будет иметь электродвигатели для перемещения окон, вентиляторов и дворников.
Современная цивилизация в буквальном смысле остановится без электромоторов. Будущее обещает дороги, на которых доминируют электромобили и заводы, укомплектованные роботами, движения которых приводятся в движение электродвигателями. Основное понимание электродвигателей имеет важное значение для их правильного применения.
Хотя все электродвигатели выполняют одну и ту же основную функцию преобразования электрической энергии в механическую, метод, с помощью которого они преобразуют энергию, может сильно различаться.Что касается методов преобразования, существует четыре основных типа электродвигателей: серводвигателей , синхронные двигатели, асинхронные двигатели и электростатические двигатели, которые также называются конденсаторными двигателями.
История
В 1821 году Майкл Фарадей использовал электрическую энергию от батареи, чтобы проволока обвивала магнит вокруг лужи ртути. Подобный эксперимент был проведен в 1822 году Питером Барлоу с использованием звездообразного колеса под названием Колесо Барлоу, которое погружало свои кончики в ртуть при вращении.
В 1827 году венгерский ученый и священник по имени Аньос Йедлик изобрел то, что он назвал «электромагнитным ротором», который был первым разработанным и изготовленным электродвигателем, который содержал те же компоненты статора и ротора, которые сегодня узнаваемы в двигателях. ,
В 1837 году Томас Давенпорт приобрел первый патент на электродвигатель, предназначенный для коммерческого использования. Давенпорт был человеком, опередившим свое время, и, хотя его дизайн был надёжным, лишь спустя много времени после истечения срока действия его патента были разработаны батареи и электрические сети для экономичного питания его двигателя.
К концу девятнадцатого века были доступны эффективные источники электроэнергии, и электродвигатели стали ключевой частью промышленной революции. За ранними изобретателями последовало бесчисленное множество других изобретателей и новаторов, повышающих эффективность и эффективность электродвигателей.
 |
 |
 |
| Электродвигатели — Решения для электродвигателей |
Электродвигатели — Решения для электродвигателей |
Электродвигатели — Решения для электродвигателей |
 |
 |
 |
| Электродвигатели — h3W Technologies, Inc. |
Электродвигатели — h3W Technologies, Inc. |
Электродвигатели — h3W Technologies, Inc. |
Принципы
Чтобы понять, как лучше всего использовать электродвигатели, полезно понять основные принципы электричества.
Электричество — это движение электронов от атома к атому в проводящей среде, такой как провод. Ранние экспериментаторы считали электричество «жидкостью» с атрибутами, соответствующими жидкости, протекающей по трубам.Современные техники, электрики и инженеры все еще находят эту аналогию полезной.
В этой аналогии с жидкостью электрический заряд — это мера количества электрической «жидкости», напряжение — это мера электрического давления, а ток — мера скорости электрического потока. Поскольку подобные заряды отталкивают друг друга, электрический ток течет из мест с положительным зарядом в места с отрицательным зарядом.
Ганс Кристиан Эрстед открыл в 1820 году, что электрический ток генерирует магнитное поле .Продолжая эту работу, Андре-Мари Ампер обнаружил то, что стало известно как закон Ампера, что когда два провода расположены параллельно и электрический ток пропускается через один провод, электрический ток будет индуцироваться в другом проводе.
В качестве вспомогательного средства памяти Джон Амброуз Флеминг разработал правило для левой руки, в котором левая рука используется большим пальцем, направленным вверх, чтобы указать направление движения двигателя, указательным пальцем, указывающим вперед, чтобы указать направление тока, и средний палец указывает в сторону, чтобы указать направление магнитного поля.
Эта взаимосвязь между электричеством и магнетизмом «толкай меня / толкай» позволяет электрическому току физически перемещать магнит, и наоборот.
Основные операции
Основную работу электродвигателя можно понять, представив очень простую конструкцию, состоящую только из ротора и статора. Как следует из названий, ротор вращается, а статор неподвижен или неподвижен.
Ротор — это стержень, который вращается вокруг своей длинной оси.Рука вытягивается из стержня, а на кончике руки находится постоянный магнит. Статор представляет собой стержень, расположенный параллельно ротору и вне радиуса качания рычага ротора.
Стержень статора обмотан проволокой. Когда электрическая мощность подключена, ток течет по проводу и генерирует магнитное поле вокруг статора. Магнитные поля катушек объединяются, превращая статор в электромагнит. Магнитное поле электромагнита затем притягивает постоянный магнит на роторе, заставляя ротор качаться.
Система коммутации, включающая проволочных щеток на статоре и металлические полосы на роторе, замыкает цепь и поочередно подает питание и обесточивает электромагнит в зависимости от того, нужно ли притягивать магнит ротора или нет.
Для получения механической энергии вал может быть прикреплен к ротору. Когда ротор вращается, вал тоже будет вращаться, как и колесо, дрель, насос или лопастей вентилятора или все, что еще прикреплено к валу.
Этот воображаемый двигатель очень неэффективен и имеет недостатки; например, ротор будет лучше сбалансирован двумя руками, а не одной. И для большей эффективности, во всех, кроме самых примитивных двигателей, магнитные полюса электромагнита циклически переключаются с помощью более сложной щеточно-контактной системы коммутатора, так что магнит ротора притягивается, когда он поворачивается к статору, и отталкивается, когда это отворачивается.
Несмотря на эти недостатки, конструкция демонстрирует основной принцип того, как практически все электродвигатели работают со статорами и роторами для преобразования электроэнергии в магнетизм и магнетизм в механическую энергию.
При классификации на основе конструкции электродвигателя существуют две основные категории: щеточные моторы и бесщеточные моторы . Матовые электродвигатели могут быть легко определены в зависимости от конструкции двигателя. Мотор с щеткой, как правило, представляет собой тип двигателя постоянного тока и работает на основе действий намотанного ротора (также известного как якорь), коммутатора и статора с постоянным или намотанным магнитом. Мотор получил свое название от коммутатора, который оснащен многочисленными щетками.Эти щетки работают, позволяя току течь через них и таким образом поступать на намотанный ротор. Существует пять основных типов щеточных двигателей: шунтирующие двигатели постоянного тока, намотанные двигатели серии DC, составные двигатели постоянного тока, двигатели постоянного тока с постоянными магнитами и двигатели с отдельным возбуждением. Бесщеточные электродвигатели, которые могут работать без использования щеток для передачи электрического тока, также чаще всего относятся к типу двигателей постоянного тока. В то время как щеточные двигатели могут столкнуться с некоторыми проблемами из-за их более сложной конструкции, бесщеточные двигатели устранили многие из этих проблем.Бесщеточные двигатели состоят из внешнего ротора с постоянными магнитами, трехфазной катушки, датчика и приводной электроники. Вместо щеток, бесщеточные двигатели передают ток с помощью датчиков, называемых датчиками эффекта Холла.
Инновации и вариации
Из ранних экспериментальных двигателей, которые были в основном магнитами, вращающимися внутри проволочных петель, расцвели бесчисленные инновации и вариации. Возможно, наиболее важное различие между типами электродвигателей заключается в том, что они изготовлены для работы на постоянном токе , постоянном токе (переменный ток).
Никола Тесла приписывают создание первого двигателя переменного тока в 1887 году. Двигатель переменного тока работает от переменного тока и использует изменяющееся магнитное поле, создаваемое переменным током, для перемещения ротора, поэтому коммутатор не требуется. Двигатели переменного тока могут быть асинхронными или синхронными. Синхронные электродвигатели представляют собой тип двигателя переменного тока, который работает на основе вращающегося магнитного поля, которое является результатом ротора двигателя и тока, проходящего с одинаковой скоростью. Так же, как синхронные двигатели являются асинхронными двигателями, которые довольно идентичны, за исключением того, что асинхронные двигатели являются асинхронными, даже когда их называют асинхронными двигателями вместо асинхронных двигателей.Асинхронные двигатели работают на основе принципа электромагнитной индукции, при котором напряжение создается на проводнике, являющемся ротором, когда он движется через магнитное поле. Асинхронные двигатели дешевле, в то время как синхронные двигатели могут обеспечивать постоянную скорость при изменении крутящего момента.
Двигатель переменного тока может быть одно- или трехфазным двигателем, поэтому существует четыре основных типа двигателей переменного тока: однофазный асинхронный двигатель, трехфазный асинхронный двигатель, однофазный синхронный двигатель и трехфазный синхронный двигатель.Двигатели постоянного тока всегда однофазные.
В цепи двигателя можно использовать фазовый преобразователь для преобразования мощности переменного тока в мощность постоянного тока до того, как он достигнет двигателя постоянного тока, а затем двигатель постоянного тока может работать — косвенно — с источником питания переменного тока. Аналогично, существуют фазовые преобразователи, которые преобразуют мощность постоянного тока в мощность переменного тока для запуска двигателей переменного тока.
Двигателитакже различаются по размеру, количеству магнитных полюсов статора и ротора, скорости вращения, а также номинальному напряжению и току. Двигатели с выходной механической мощностью менее одной лошадиной силы, то есть 746 Вт, называются двигателями с дробной мощностью или двигателями FHP.Двигатели, способные регулировать частоту вращения, являются двигателями с переменной скоростью.
Сервомоторы, используемые в самолетах-хобби и роботизированных приводах, имеют встроенные микроконтроллеры, благодаря которым они могут поворачиваться на точное количество градусов по команде. Шаговые двигатели, используемые в роботах и 3D-принтерах, являются еще более точными, а также намного более дорогими и сложными в управлении. Сервомоторы работают на основе сервомеханизма (часто сокращаемого просто до сервопривода), который использует чувствительную к ошибкам обратную связь, чтобы функционировать и вносить исправления.Серводвигатели представляют собой чрезвычайно маленькие электродвигатели и часто используются в робототехнике, например, в автомобилях с дистанционным управлением.
Наконец, электростатические двигатели сильно отличаются от других, и вместо этого работают на основе принципа притяжения и отталкивания электрического заряда. Электростатические двигатели часто используются в очень небольших приложениях, таких как микромеханические системы (MEMS).
Этот список всех возможных двигателей едва ли полон и предназначен только для того, чтобы дать представление о том, насколько разнообразны производители электродвигателей.
Эксплуатационные соображения
Для больших двигателей правильная установка имеет решающее значение для безопасности двигателя, рабочего места и персонала.
В целях безопасности двигатель должен быть расположен в месте, где его вращающийся вал не может зацепить рабочую одежду, а его шнуры питания не сломают рабочие ноги. Шум двигателя может привести к потере слуха, что требует принятия мер, таких как специальный мягкий корпус или требующих от работников использования средств защиты слуха.
Если монтаж небезопасен, двигатель может сильно вибрировать, вызывая внутренние повреждения, которые не будут видны до тех пор, пока двигатель не сломается.Если они не предназначены специально для таких сред, двигатели должны быть защищены от воды, пыли, вибрации, ударов и экстремальных температур. Если на корпусе двигателя имеются вентиляционные прорези, их нельзя размещать на стене или каким-либо образом накрывать, чтобы двигатель не перегрелся.
Электродвигатели будут генерировать электромагнитные помехи, которые могут нарушить работу электронных систем связи. Магниты двигателя также могут нарушить работу электроники.
В нормальных условиях двигатель просто должен быть надежно подключен к соответствующему источнику питания и может эксплуатироваться простым щелчком переключателя в течение многих лет безаварийной работы.Однако некоторые электродвигатели могут иметь внутренние предохранители для защиты от скачков напряжения в сети, в то время как другим требуется защита от внешних цепей. Некоторые электродвигатели могут требовать плановой проверки и технического обслуживания сертифицированными инспекторами. Такие требования обычно применяются к тяжелым промышленным двигателям, в то время как в целом более мелкие двигатели, такие как бытовые электроприборы, не требуют или требуют очень мало обслуживания.
Устранение неисправностей и ремонт
Профессиональные специалисты по обслуживанию клиентов скажут вам, первый вопрос, который нужно задать, если оборудование не включается, это: «Подключено ли оно?» Это менее глупый вопрос, когда речь идет о более крупных двигателях, поскольку следует проверить всю выделенную цепь двигателя, чтобы убедиться в отсутствии зазоров между источником питания и соединениями двигателя.Почти само собой разумеется, что предохранители и автоматический выключатель также должны быть проверены.
Другая причина, по которой двигатель может вообще не работать, заключается в повреждении катушек. Изоляция катушки, возможно, вышла из строя, вызвав короткое замыкание. В этом случае катушка должна быть заменена.
В двигателях постоянного тока щетки коммутатора могут изнашиваться. Замена щеток часто относительно проста и недорога. Постоянные магниты могут быть заменены или модернизированы до редкоземельных магнитов для лучшей производительности.
Двигатели, которые издают громкие или «странные» шумы, вероятно, имеют проблемы с подшипниками.Подшипники могут прослужить годы или погаснуть в следующий момент. Чтобы избежать повреждения двигателя и окружающей среды, лучше выключить двигатель и осмотреть его.
Что искать в получении двигателя
Возможно, первый вопрос при приобретении двигателя заключается в том, может ли он использовать имеющуюся мощность. Для двигателя переменного тока требуется питание переменного тока или преобразователь питания. Для двигателя постоянного тока требуется питание постоянного тока или преобразователь питания.
Электродвигатели в первую очередь различаются по частоте вращения (оборотов в минуту), выходной мощности (Вт) и номинальному напряжению / току.
Некоторые двигатели имеют фиксированную скорость вращения, а другие — переменные. Коробки передач могут изменять скорость вращения вала как вверх, так и вниз. Как правило, для данного двигателя более низкая скорость равна большему крутящему моменту.
Выходная мощность двигателя (измеряется в ваттах или лошадиных силах) является важным экономическим фактором. Слишком много энергии могло быть потрачено впустую, и слишком мало энергии, безусловно, есть.
Слишком маленькое напряжение или ток, и двигатель не вращается. Слишком много, и двигатель может быть поврежден.
NEMA, Национальная ассоциация производителей электрооборудования, предлагает таблицу стандартизированных размеров для двигателей, доступных от производителей электродвигателей.
Чтобы легко найти список производителей промышленных двигателей, вы можете просмотреть списки компаний Справочника IQS.
Электродвигатели Типы
- 12 В двигатели представляют собой тип электродвигателя, который работает на основе 12 напряжений, которые являются единицей электрической силы, энергии, которую они превращают в механическая энергия, которая будет использоваться для питания различных машин или оборудование.
- 3-фазные двигатели представляют собой тип электродвигателя, который работает на основе трехфазного электрическая нагрузка, которая является распространенной формой передачи электроэнергии.
- генерируют свое магнитное поле электромагнитом
питание от того же напряжения переменного тока, что и катушка двигателя. Рассредоточен
в
одно- или трехфазные формы с возможностью смены направления
его текущих циклов.
- есть
встроенные механические щетки, которые автоматически переключают катушки на
ротор как двигатель вращается.Щеточные моторы
более экономичным, чем безщеточный.
- Бесщеточные двигатели позволяют
коммутация катушек на статоре с помощью внешнего силового привода
без кистей.
- имеют регулируемые скорости и крутящий момент.
В электродвигателе постоянного тока будет регулироваться скорость и крутящий момент
вместе
с ротором и статором с постоянным магнитным полем.
- являются
двигатели, которые преобразуют электрическую энергию в движение с помощью магнетизма. электрический
моторы контрастные двигатели потому что двигатели используют
топлива и электродвигателей нет.
- состоят
редуктора и мотора. Вместе они могут снизить скорость
двигателя до предпочтительных оборотов.
- Асинхронные двигатели использовать электрический ток для генерации вращения в катушках вместо доставки вращение напрямую.Они получают свой крутящий момент от произведенных токов в петлях путем изменения магнитного поля в полевых катушках.
- Линейный двигатель представляет собой тип электродвигателя, в котором преобразуется механическая энергия обеспечивает движение к оборудованию или технике только на одном линейная ось.
-
встроить магниты двигателя в узел ротора. Эта конструкция позволяет
их совместить с вращающимся магнитным полем статора.
- иметь валы, которые не вращаются свободно; валы движутся к определенному угловое расположение. Они часто используются для управления движением в роботах, жесткие диски и т. д.
- Однофазные двигатели представляют собой тип электродвигателя, который работает на однофазном электрическом мощность, которая является источником питания, в котором все напряжения Блок питания в унисон как единое целое, функционирующий для распределения мощность переменного тока (переменного тока).
- Шаговые двигатели по сути являются электрическими двигателями без коммутаторов. Все о коммутации
управляется извне контроллером мотора, может наступать на аудио
частоты,
позволяя им вращаться довольно быстро и быть запущенным и остановленным точно
в контролируемой ориентации.
- Синхронные двигатели могут работать с постоянной скоростью вплоть до полной нагрузки.У них есть серия трех обмоток в секции статора с вращающейся областью; там не промах.
Electric Motors Условия
— ток, поток которого можно изменить. Переменный ток обычно
доступны в одном и трех формах. 1 Электродвигатель лошадиных сил — обычно используется для питания медленно движущихся транспортных средств, таких как тракторы и другое сельскохозяйственное оборудование, а также мощных инструментов и приборов, таких как настольные пилы и насосы для бассейнов. Электродвигатель мощностью 2 лошадиных силы — это просто электродвигатели с выходной мощностью в две лошадиные силы. |
Информационный видеоролик по электродвигателю
,
Похожие записи
