Как устроен электродвигатель переменного тока. Какие бывают виды электродвигателей переменного тока. В чем принцип работы асинхронных и синхронных двигателей. Каковы преимущества и недостатки электродвигателей переменного тока. Где применяются электродвигатели переменного тока.
Устройство электродвигателя переменного тока
Электродвигатель переменного тока состоит из двух основных частей:
- Статор — неподвижная часть с обмотками, создающими вращающееся магнитное поле
- Ротор — вращающаяся часть, приводимая в движение магнитным полем статора
Статор представляет собой цилиндрический корпус из стальных листов с пазами для размещения обмоток. Обмотки статора подключаются к источнику переменного тока.
Ротор размещается внутри статора на подшипниках и может свободно вращаться. На роторе также размещаются обмотки или проводящие стержни.
Принцип работы электродвигателя переменного тока
Принцип работы электродвигателя переменного тока основан на взаимодействии вращающегося магнитного поля статора и тока, индуцированного в роторе. Как это происходит?

- Переменный ток в обмотках статора создает вращающееся магнитное поле
- Это поле пересекает проводники ротора и индуцирует в них ЭДС
- Под действием ЭДС в роторе возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент
- Ротор начинает вращаться вслед за полем статора
Таким образом, электрическая энергия преобразуется в механическую энергию вращения вала двигателя.
Виды электродвигателей переменного тока
Существует два основных вида электродвигателей переменного тока:
Асинхронные двигатели
В асинхронных двигателях ротор вращается несинхронно (медленнее) магнитному полю статора. Это наиболее распространенный вид электродвигателей.
Синхронные двигатели
В синхронных двигателях ротор вращается синхронно с магнитным полем статора. Они применяются реже асинхронных.
Особенности устройства асинхронного двигателя
Асинхронный двигатель имеет следующие особенности конструкции:
- Статор с трехфазной обмоткой
- Короткозамкнутый ротор типа «беличья клетка»
- Отсутствие электрических контактов с ротором
Короткозамкнутый ротор представляет собой цилиндр из стальных листов с алюминиевыми стержнями, замкнутыми кольцами по торцам. Такая конструкция очень надежна и не требует обслуживания.

Особенности устройства синхронного двигателя
Синхронный двигатель отличается следующими особенностями:
- Статор с трехфазной обмоткой
- Ротор с обмоткой возбуждения, питаемой постоянным током
- Наличие контактных колец для подачи тока на ротор
- Необходимость системы возбуждения ротора
Обмотка ротора создает собственное магнитное поле, которое жестко сцепляется с полем статора, обеспечивая синхронное вращение.
Преимущества электродвигателей переменного тока
- Простота конструкции и высокая надежность
- Низкая стоимость производства
- Высокий КПД (до 95% и выше)
- Возможность работы напрямую от сети переменного тока
- Стабильная частота вращения
- Большой пусковой момент
Благодаря этим преимуществам двигатели переменного тока получили широчайшее распространение в промышленности и быту.
Недостатки электродвигателей переменного тока
К основным недостаткам можно отнести:
- Сложность регулирования частоты вращения
- Высокие пусковые токи
- Низкий коэффициент мощности при малых нагрузках
- Чувствительность к колебаниям напряжения сети
Однако современные системы управления во многом компенсируют эти недостатки.

Применение электродвигателей переменного тока
Электродвигатели переменного тока нашли применение во многих сферах:
- Промышленное оборудование и станки
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортные механизмы
- Бытовая техника (стиральные машины, пылесосы)
- Электроинструмент
- Электротранспорт
Асинхронные двигатели чаще используются в механизмах с постоянной скоростью вращения. Синхронные — там, где требуется точное поддержание скорости.
Регулирование скорости электродвигателей переменного тока
Существует несколько способов регулирования скорости вращения двигателей переменного тока:
- Изменение частоты питающего напряжения
- Изменение числа пар полюсов обмотки статора
- Изменение величины питающего напряжения
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным является частотное регулирование с помощью преобразователей частоты. Оно позволяет плавно изменять скорость в широком диапазоне.
Заключение
Электродвигатели переменного тока являются основой современных электроприводов благодаря своей простоте, надежности и эффективности. Они широко применяются как в промышленности, так и в бытовой технике. Несмотря на некоторые недостатки, их преимущества обеспечивают им лидирующее положение среди электрических машин.

Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:

Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
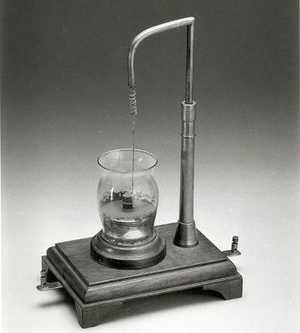
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.

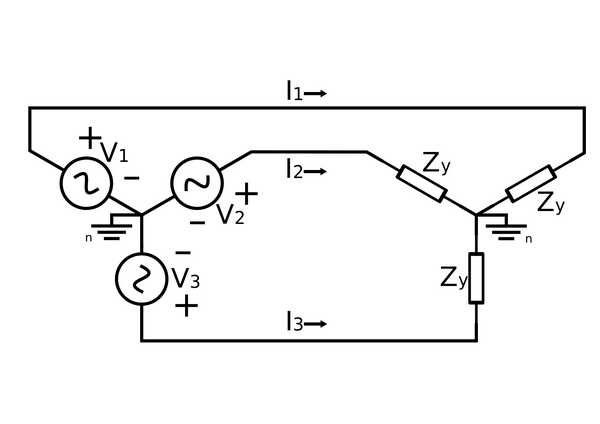
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
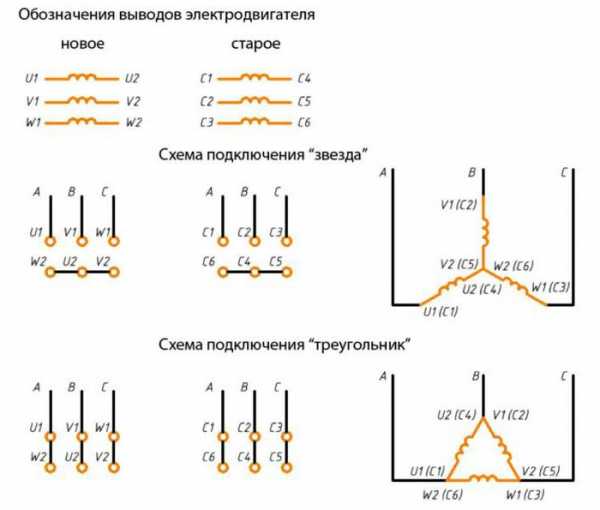
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Это может быть интересно:tokidet.ru
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
 Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
 Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
 Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток. 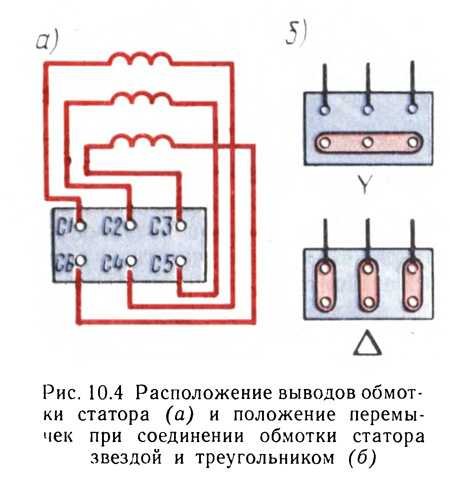
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
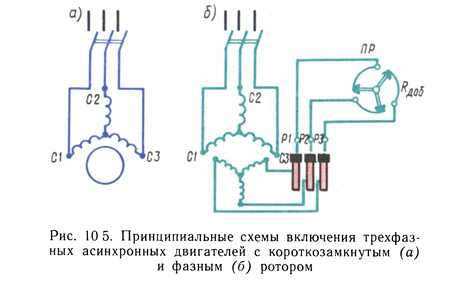 Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
zewerok.ru
Устройство электродвигателей переменного тока :: SYL.ru
При помощи электродвигателей переменного тока происходит конвертация электроэнергии в механическую. Бывают моторы переменного и постоянного тока. У них есть много отличий, особенно в конструкции. В промышленности большое распространение получили электродвигатели, работающие на переменном токе. Их можно встретить как в бытовых приборах, так и в промышленности. Они встречаются везде — в стиральных машинах, автомобилях, перфораторах, болгарках, производственных станках.
Как работает электродвигатель?
Функционирование электромоторов напрямую зависит от законов Ампера и электромагнитной индукции Фарадея. Закон Фарадея гласит, что на замкнутых проводниках, которые расположены в магнитном поле, генерируется ЭДС. В моторах поле создается обмотками статора, именно по ним проходит переменный электрический ток. Трехфазные электрические двигатели переменного тока работают именно по этим законам.

Закон Ампера описывает вращение ротора внутри статора. Когда по проводнику протекает электрический заряд, при условии, что воздействует магнитное поле, появляется электродвижущая сила. Причём эта движущая сила направлена перпендикулярно силовым линиям поля. При этом ротор, установленный по центру двигателя на подшипниках, начинает вращаться.
Асинхронный двигатель
В промышленности огромную популярность завоевали асинхронные электродвигатели переменного тока. Они очень неприхотливые, отдают высокую мощность, надежны. Устройство электродвигателя переменного тока асинхронного типа состоит из нескольких частей:
- Неподвижная часть — статор, имеет цилиндрическую форму. Выполнен из стальных листов с пазами, в которые укладываются обмотки. Оси обмоток расположены под углом 120 градусов друг к другу. Все края обмоток выводятся в коробку, расположенную сверху мотора. Всего шесть выводов, которые можно соединить по схеме «звезда» или «треугольник». Зависит от того, какие параметры у электропривода.
- Чаще всего используется короткозамкнутый ротор. Конструкция его называется «беличья клетка» за внешнее сходство. В ней имеется несколько стержней из меди или алюминия, которые коротко замкнуты при помощи металлических колец на торцах.
- Фазный ротор немного иной конструкции. На нем укладывается три обмотки, напоминающие те, которые расположены в статоре. Края всех обмоток выводятся в коробку, где производится их соединение. При помощи фазного ротора можно добавить в цепь питания обмотки резистор, способный менять сопротивление. Это позволяет уменьшить силу тока при запуске.
Обязательно на асинхронном электродвигателе устанавливается крыльчатка, которая позволяет охлаждать обмотки, две крышки, подшипники, коробка, вал.
Как работает асинхронник?

Функционирует асинхронный электрический двигатель по законам электромагнитной индукции. ЭДС возникает в том случае, когда у магнитного поля обмоток статора и ротора разная скорость вращения. В случае, если эти параметры были бы одинаковы, электродвижущая сила не смогла бы сгенерироваться. Но так как на ротор воздействуют тормозящие факторы, например, трение и нагрузка со стороны подшипников, то всегда будут благоприятные условия для работы устройства.
Синхронные электродвигатели
Однофазные электродвигатели переменного тока синхронного типа получили широкое распространение. Конструкция у таких моторов немного отличается от рассмотренной выше. В них ротор вращается с такой же скоростью, с какой движется магнитное поле обмоток статора. А на якоре имеются обмотки, соединенные с коллектором. Конструкция контактных площадок выполнена так, что в один момент времени питание подается при помощи графитовых щеток только на пару противоположных ламелей.

Следовательно, запитана только одна обмотка на роторе. Подобные коллекторные электродвигатели переменного тока получили широкое распространение в бытовой технике. Например, в электроинструментах, стиральных машинах, двигателях привода компрессоров кондиционеров или холодильников.
Как работает синхронный электродвигатель?
Всего можно выделить несколько этапов работы асинхронного электродвигателя:
- Возникновение вращающего момента происходит, как только начинают взаимодействовать магнитный поток в статоре и электрический ток в роторе.
- Магнитный поток изменяет направление своего движения. Причём происходит это одновременно с реверсом тока. При помощи такого поведения получается сохранить вращение ротора в одном направлении.
- Чтобы добиться необходимой частоты вращения ротора, достаточно произвести регулировку питающего напряжения. Во многих бытовых приборах используется для этой цели простой реостат, который изменяет свое сопротивление.
Конструкция синхронного двигателя весьма ненадежная, так как очень часто изнашиваются графитовые щетки, либо ослабляются их пружины. При разрушении подшипников на валу появляется характерный неприятный звук. Со временем загрязняются ламели на коллекторе. Их можно очистить при помощи наждачной бумаги или спиртосодержащими растворами.
Особенности диагностики синхронных двигателей

Чтобы осуществить проверку электродвигателя, необходимо полностью обесточить инструмент и разобрать его. Если имелось короткое замыкание, то внутри изоляционный материал начнёт оплавляться, и появится неприятный запах. Поэтому первым делом необходимо понюхать ротор. Если нет признаков поломки, то проверьте на якоре состояние ламелей. Делается это при помощи мультиметра.
Переключаете его в режим измерения сопротивления с порогом 200 Ом. Прозвоните все соседние ламели. Если сопротивление меняется, то это говорит о том, что внутри катушки имеется поломка. Вместо мультиметра можно использовать простую лампу накаливания. Для этого необходимо подключить электродвигатель к источнику питания 12 Вольт, в разрыв установить лампу накаливания. Вращая вал рукой, необходимо посмотреть на поведение лампы.
В случае если лампа начинает моргать, это говорит о наличии межвиткового замыкания. Если же она совсем не горит, то имеется обрыв в цепи питания, либо неисправна одна из ламелей. Чтобы проводить ремонт, необходимо заменить обмотку и установить новую изоляцию. Только в этом случае двигатель не перегорит. Обязательно после ремонта проведите испытание электродвигателя переменного тока. Для увеличения ресурса мотора обязательно нужно проводить перемотку ротора каждые два года.
Преимущества и недостатки моторов, работающих на переменном токе

Большую популярность приобрели трехфазные электродвигатели переменного тока асинхронного типа. В промышленности их доля составляет более 95%. Но у них имеется недостаток — изменение частоты вращения можно производить только лишь путем регулировки частоты электрического тока. Для этого используются частотные преобразователи, стоимость которых довольно высокая. При изменении частоты вращения снижается, причем существенно, мощность электродвигателя. У асинхронников очень высокий пусковой ток, а момент при старте крайне низкий. Но можно также применять редукторы, чем-то похожие на автоматическую коробку передач, используемую в автомобилях.

У синхронных моторов имеется один большой недостаток — это его конструкция. Щетки из графита очень быстро разрушаются под действием нагрузки, в результате чего теряется контакт. У них также могут выходить из строя подшипники, разрушаться обмотки, а их вдвое больше, нежели у асинхронных машин. Запустить синхронную машину намного сложнее, нежели асинхронную. Поэтому в промышленности они большого распространения не получили. Да и асинхронник способен дольше работать под большими нагрузками, не испытывая «дискомфорт».
Подключение к трехфазной сети питания
Всего имеется две схемы, по которым соединяются обмотки трехфазных электрических двигателей:
- «Звезда» — крайне низкие пусковые токи, но добиться высокой мощности в этом случае вряд ли получится.
- «Треугольник» — пусковой ток очень высокий, поэтому использование такой схемы рекомендуется при работе в устоявшемся режиме.
Подключить асинхронный двигатель к сети переменного тока с трехфазным напряжением очень просто.
Для этого в клеммной коробке необходимо соединить шесть выводов обмоток. Но если вы произведете подключение неверно, то обмотки расплавятся. Потребуется проводить ремонт электрической машины. Синхронные машины намного сложнее подключить, так как необходимо правильно соединить обмотки ротора из статора.
Подключение трехфазного двигателя в однофазную сеть
Для того чтобы произвести подключение трехфазного асинхронного двигателя в бытовую сеть, лучше всего воспользоваться конденсаторами. С их помощью можно произвести сдвиг по фазе питающего напряжения. Таким образом, вы получите третью дополнительную фазу, необходимую для запуска и работы электродвигателя. Если нужно запускать мотор мощностью до 1,5 кВт, то достаточно применять один рабочий конденсатор. Если же мощность свыше 1,5 кВт, то параллельно ему потребуется включать еще один посредством выключателя. Он должен работать только несколько секунд, пока двигатель не запустится. Так запускаются электродвигатели переменного тока 220В и 380В от бытовой сети.
www.syl.ru
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
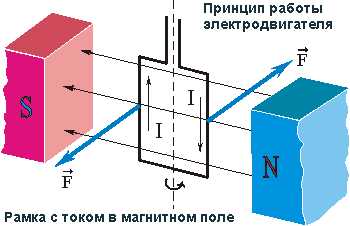
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.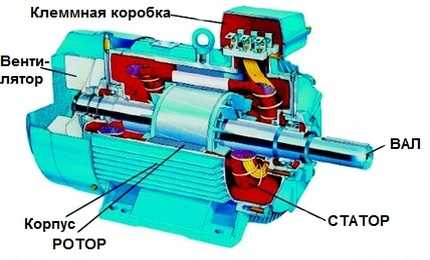
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.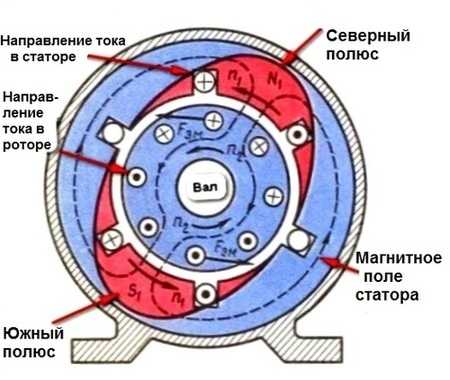
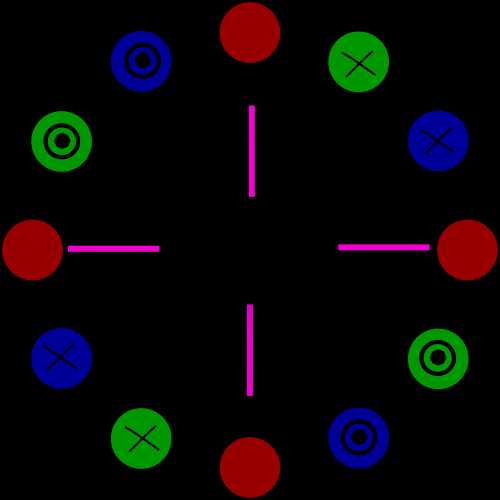
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
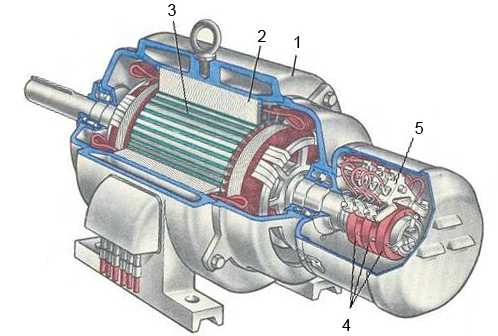
 В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
jelektro.ru
Устройство, принцип работы и подключения электродвигателей переменного тока | Полезные статьи
Электродвигатели переменного тока являются электротехническими устройствами, которые преобразовывают электрическую энергию в механическую. Электромоторы нашли широкое применение во многих отраслях промышленности для привода всевозможных станков и механизмов. Без такого оборудования невозможна работа стиральных машин, холодильников, соковыжималок, кухонных комбайнов, вентиляторов и других бытовых приборов.
По принципу работы электродвигатели переменного тока делятся на синхронные и асинхронные. Асинхронные электромоторы переменного тока наиболее часто применяются в промышленности.
 Асинхронный двигатель с креплением к фланцу
Асинхронный двигатель с креплением к фланцу
Стоит рассмотреть устройство электродвигателя переменного тока асинхронного.
Данный вид электромоторов состоит из главных частей — статора и ротора. В современных асинхронных электромоторах статор имеет неявно выраженные полюсы.
Для того чтобы максимально снизить потери от вихревых токов, сердечник статора изготавливают из соответствующей толщины листов электротехнической стали, подвергшихся штамповке. В пазы статора впрессовывается обмотка из медного провода. Фазовые обмотки статора устройства могут соединяться «звездой» или «треугольником». При этом все начала и концы впрессованных обмоток электромотора выводятся на корпус — в клеммную коробку. Подобное устройство статора электродвигателя оправданно, так как дает возможность включать его обмотки на различные стандартные напряжения. Сердечник статора запрессовывается в чугунный или алюминиевый корпус.
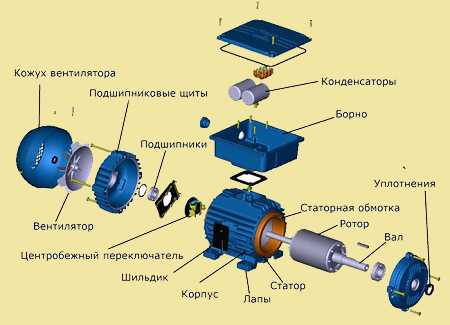
Устройство асинхронного электродвигателя
Ротор асинхронного мотора также состоит из подвергшихся штамповке листов электротехнической стали, и во все его пазы закладывается обмотка.
Учитывая конструкцию ротора, асинхронные электродвигатели подразделяются на устройства с короткозамкнутым ротором и фазным ротором.
Обмотку короткозамкнутого ротора, сделанную из медных стержней, закладывают в пазы ротора. При этом все торцы стержней соединяют при помощи медного кольца. Данный вариант обмотки считается обмоткой типа «беличья клетка». Стоит отметить, что медные стержни в пазах ротора не изолируются. Во многих асинхронных электромоторах «беличью клетку» сменяют литым ротором. Ротор напрессовывается на вал двигателя и является с ним одним целым.
Синхронные электродвигатели устанавливаются в различных электроинструментах, пылесосах, стиральных машинах. На корпусе синхронного электромотора переменного тока имеется сердечник полюса, в котором расположены обмотки. Обмотки возбуждения намотаны и на якорь. Их выводы припаяны ко всем секторам токосъемного коллектора, на которые при использовании графитовых щеток подается напряжение.
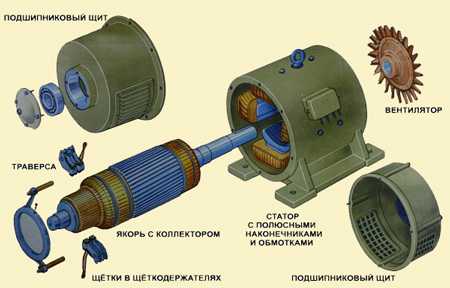
Устройство синхронного электродвигателя
Принцип действия электродвигателя переменного тока основан на применении закона электромагнитной индукции. При взаимодействии переменного электрического тока в проводнике и магните может возникнуть непрерывное вращение.
В синхронном электродвигателе якорь вращается синхронно с электромагнитным полем полюса, а у асинхронного электромотора ротор вращается с отставанием от вращающегося магнитного поля статора.
Для работы асинхронного электромотора необходимо, чтобы ротор устройства вращался в более медленном темпе, чем электромагнитное поле статора. При подаче тока на обмотку статора между сердечником статора и ротора возникает электромагнитное поле, которое наводит ЭДС в роторе. Возникает вращающийся момент, и вал электродвигателя начинает вращаться. Из-за трения подшипников или определенной нагрузки на вал, ротор асинхронного двигателя всегда вращается в более медленном темпе.
Принцип работы электродвигателя переменного тока асинхронного заключается в том, что магнитные полюса устройства постоянно вращаются в обмотках электромотора и направление тока в роторе постоянно меняется.
Скорость вращения ротора электромотора асинхронного зависит от общего количества полюсов. Для того чтобы понизить скорость вращения ротора в таком двигателе, требуется увеличить общее количество полюсов в статоре.
В синхронных электродвигателях вращающий момент в устройстве создается при взаимодействии между током в обмотке якоря и магнитным потоком в обмотке возбуждения. При изменении направления переменного тока одновременно меняется направление магнитного потока в корпусе и якоре. При таком варианте вращение якоря всегда будет в одну сторону. Примечательно, что плавная регулировка скорости вращения таких электромоторов регулируется величиной подаваемого напряжения, при помощи реостата или переменного сопротивления.
В зависимости от напряжения сети фазные обмотки статора асинхронного электромотора могут подсоединяться в «звезду» или «треугольник». Схема электродвигателя переменного тока при подключении его в сеть с напряжением 220 Вольт обмотки соединяются в треугольник, а при подключении в сеть 380 Вольт — схема обмоток имеет вид звезды.
cable.ru
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…

Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:

Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:

Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
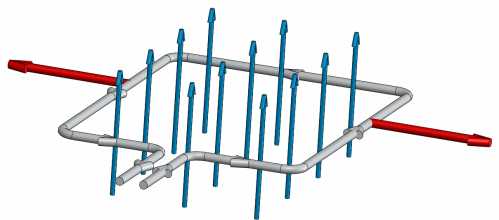
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
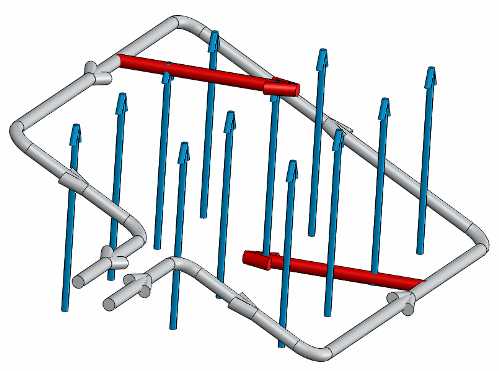
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
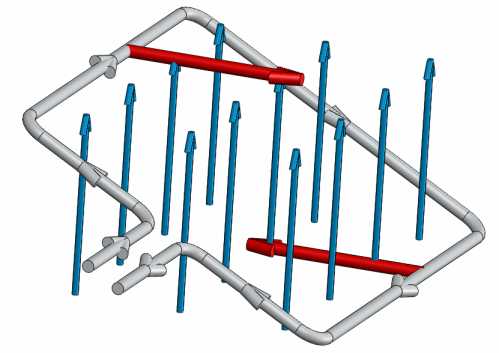
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
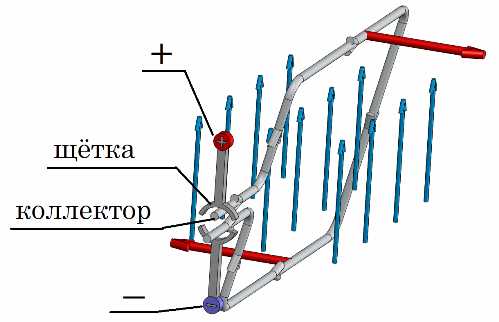
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
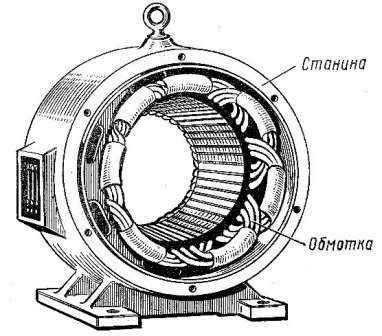
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.

Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
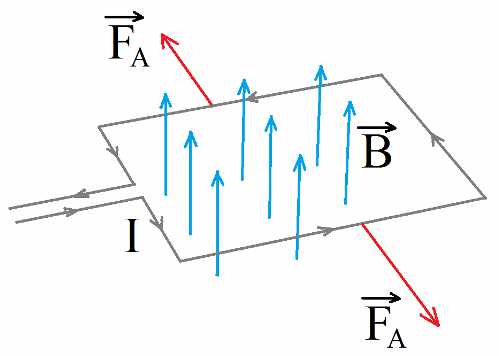
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by
Двигатели переменного тока. Принцип работы, характеристики и управление
Продолжаем наш ликбез по движкам. На этот раз речь пойдет о переменном токе, трехфазных движках разной конструкции. Их характеристикам, устройству и принципу работы. Ну и заодно подготавливаем почву под BLDC, так как там получается зверский гибрид всего и вся.
▌Вращающееся поле
Вращающееся поле это краеугольный камень всех машин переменного тока. Без него ничего не было бы и все было бы уныло и пресно. Делается оно посредством хитрой обмотки и хитрого напряжения. Сейчас подробно покажу как.
Начнем с упрощенной одновитковой обмотки. Вот такой: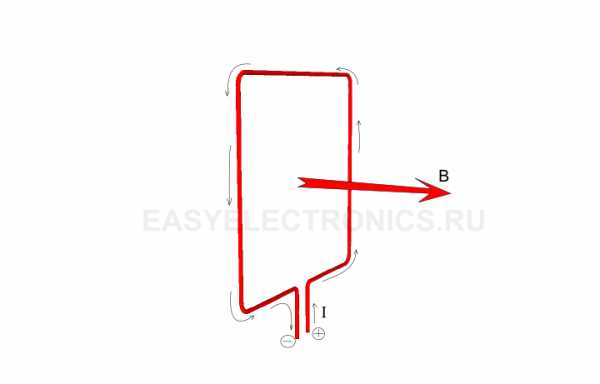
Подаем на него напряжение, получаем ток, создающий магнитный поток. Направление потока зависит от направления тока. Определяется по правилу буравчика. Вспоминаем курс физики из школы 🙂 Если сунуть туда синусоидальное напряжение, то поток через обмотку будет шнырять туда-сюда по синусоидальному же закону.
Берем три обмотки и ставим их так, чтобы магнитное поле, ими генерируемое, было направленно под 120 градусов относительно катушек.
Получаем упрощенный вариант статора. Соединяем обмотки треугольником:
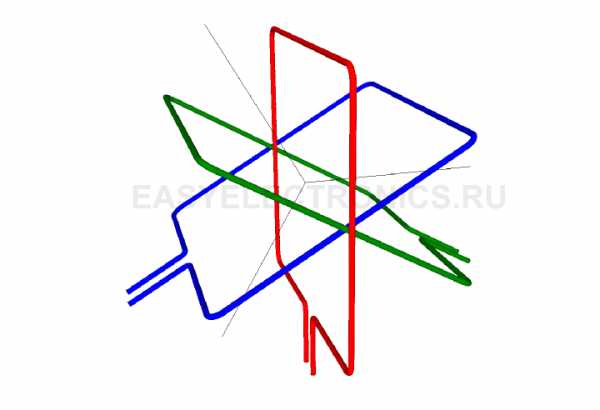
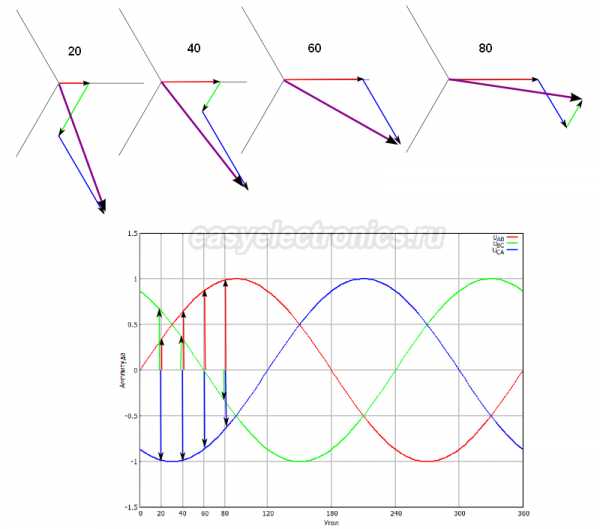
Оставим от него только направления векторов, чтобы посмотреть на это в разрезе. И загоняем в эту обмотку трехфазное напряжение. Три синуса, сдвинутые под 120 градусов.
Если взять в какой-либо момент времени напряжения и разложить магнитные потоки по векторам, которые задают наши катушки, с учетом знака, а потом все суммировать, то получим результирующий вектор магнитной индукции трех катушек. Проделав ту же операцию на несколько углов вперед будет явно видно, что результирующий вектор вращается аки часовая стрелка.
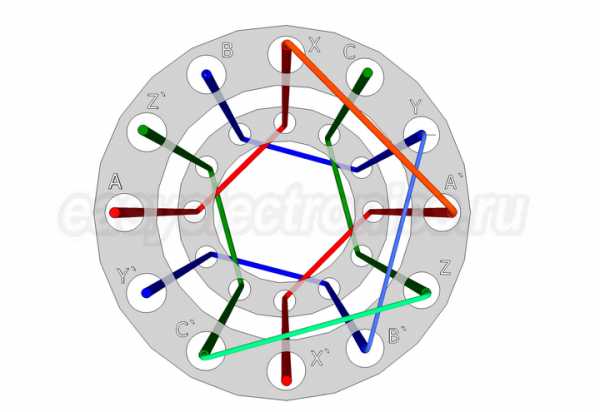
Т.е. статор, с точки зрения магнитного поля, ведет себя как вращающийся магнит. Делающий один оборот за период. Вот вам каноничная картинка, что есть в каждом учебнике по электромашинам. Полный оборот поля. Я лишь сделал ее более няшный вариант, раскрасив витки в цвета обмоток, чтобы по феншую было все.
Скорость вращения поля зависит от частоты сети. n1 = 60*f (об/мин) эта скорость зовется синхронной скоростью. Но не все так просто. Количество полюсов машины может быть и иным. Выше был пример статора двухполюсной машины. Два полюса потому, что там у результирующего магнитного потока есть север и юг и все. Но полюсов может быть больше.
Для этого обмотку каждой фазы делают из двух соединенных катушек, как то так:
И размещают их со сдвигом в 60 градусов. Вот, примерно, следующим образом. Тут у меня по одному недавитку, но их может быть и сто. Соединение секций между собой выделено более тонким проводом и чуть другим цветом.
В результате получается вот такая вот магнитная схема:
Видно, что эти четыре гипножабы образуют четыре полюса, два северных, два южных. А дальше как в старом советском мультике… пока ты на коне на четырех ногах раааз, двааа, триии, четырее… он на своих двоих раз-два, раз-два, раз-два. В четырехполюсном движке поле вращается вдвое медленней, т.к. за один период оно пробежит только пол оборота. Чем больше полюсов, тем медленней вращается поле.
С учетом количества полюсов синхронная скорость вычисляется так: n1=60*f/p ,где p — число катушек в одной фазе. Правда тут стоит учитывать такой случай, что катушки можно намотать так, что две будут вести себя как одна. В этом случае, естественно, считаем ее за одну, хоть их физически и две.
На этом принципе, кстати, в некоторых случаях делают управление скоростью двигателя. Т.е. хитро переключая катушки делают, например, либо два полюса, либо четыре. Ступенчато переключая скорость.
▌Реверс поля
Тут даже и говорить нечего — меняем местами две фазы и поле поехало в другую сторону. Элементарно 🙂
▌Асинхронный двигатель
Вы наверняка все знаете его. Помнишь как в детстве, разбираешь движок, надеешься на нямку и ништяки, а оттуда выпадает тупая алюминиевая блямба и обламывает весь кайф. Вот такой вот, малята, АД. В смысле асинхронный двигатель.
Асинхронный двигатель это король электропривода. Он технологичен, а значит дешев. Надежен, там трутся только подшипники. Прост и легко запускается. Не требует никакого дорогостоящего барахла, вроде редкоземельных магнитов. Есть у него и недостатки — сложности регулирования скорости и своебразная механическая характеристика, но все это решается умной электроникой.
Как же он работает то? Сейчас разберем.
Итак, у нас есть статор и его вращающееся поле:
в него мы помещаем короткозамкнутую обмотку ака «беличье колесо»

Она состоит из штырей закороченных на лобовые кольца. А обычно еще проще делают. Набирают шихтованный ротор (т.е. из изолированных пластин, чтобы гасить вихервые токи) окаливают его, создавая тем самым изоляцию, а потом заливают в пазы цельнолитую алюминиевую обмотку. Дешево, просто, технологично.
Так вот, поле бежит мимо этих штырей наводя в них ЭДС. А так как обмотка замкнута, то эта ЭДС порождает ток. Но если у нас есть ток и есть магнитное поле статора, то должна неминуема появиться сила Ампера. И она появляется. Обмотка начинает увлекаться за полем. Но догнать его не может никогда, ведь если она его догонит, то движение поля относительно обмоток станет равным нулю и сила пропадет. Вот так и плетется она в конце на подсинхронной частоте. Потому и зовется двигатель асинхронным. А относительная разность скорости поля и ротора зовется скольжением.
s=(n1-n)/n1
Измеряется в единицах или процентах. Обычно, на номинальном моменте, скольжение составляет 2-7% С ростом нагрузки скольжение растет. А скорость вращения движка завязана на скорость поля. Что сильно обламывает любителей регулировать скорость. Потому то асинхронные двигатели до сих пор не вытеснили те же коллекторные отовсюду откуда можно. Мало того, что им нужна переменка, так еще и не погазуешь нифига.
▌Механическая характеристика АД. Пуск и регулирование скорости
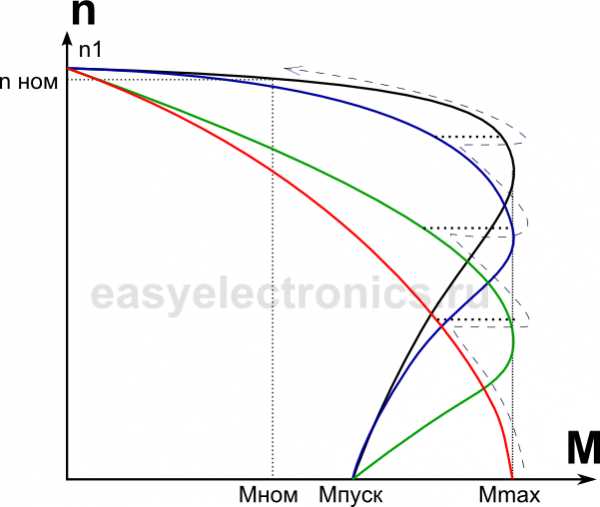
Она весьма извилистая, с рядом приколов. Вот такая:
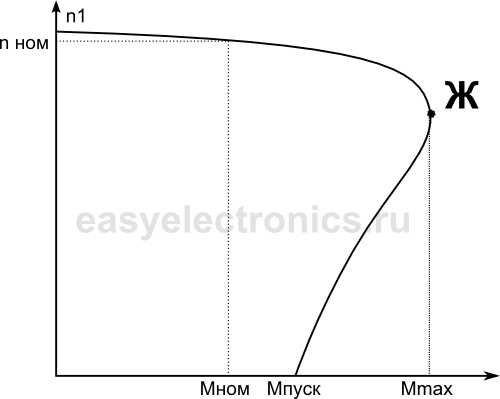
Обратите внимание на разницу между пусковым и максимальным моментом. Т.е. движок должен стартануть в относительно тепличных условиях и лишь потом можно его грузить. Да и то до некоторого предела, до точки Ж, где случается жопа. Машина теряет устойчивость, момент резко снижается, а обороты падают до нуля. Движок лишь беспомощно дергается и очень сильно греется. Ведь в этот момент он превращается в обычный трансформатор у которого ротор это вторичная обмотка и она закорочена наглухо.
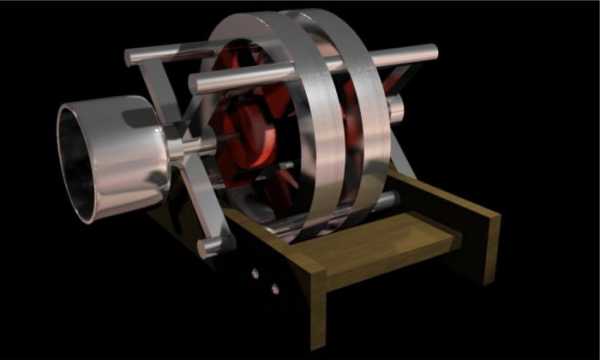
Вариантов борьбы с этим явлением несколько. Обычно конструктивные, делают либо две беличьи клетки одна над другой, либо просто глубокие пазы, т.е. клетка получается не из прутьев, а из пластин. Это снижает разницу между моментом критическим и пусковым. Еще, в особо тяжелых случаях, вроде кранового привода, делают фазный ротор. Т.е. обмотка не беличья клетка, а нормальная обмотка трехфазная. Из провода, ее концы с одной стороны соединены звездой, а с другой вытащены наружу через контактные кольца. Вот как на этой картинке под четвертым номером:
С них заводят на пусковые сопротивления:
И при пуске вводят все сопротивления в ротор, при этом ток падает, механическая характеристика проседает, а пусковой момент увеличивается. Потом, по мере разгона, сопротивления выводят посекционно, а движок переходит с одной характеристики на другую, пока не выйдет на естественную. Делается это автоматом, по реле времени или через реле контроля скорости.
Впрочем, это вам так, для общего развития. Не думаю, что с таким пуском столкнетесь вживую. Разве что вы не работаете цеховым электриком и колупаете краны выпуска еще прошлого века. Сейчас все это активно отмирает и заменяется на частотное регулирование.
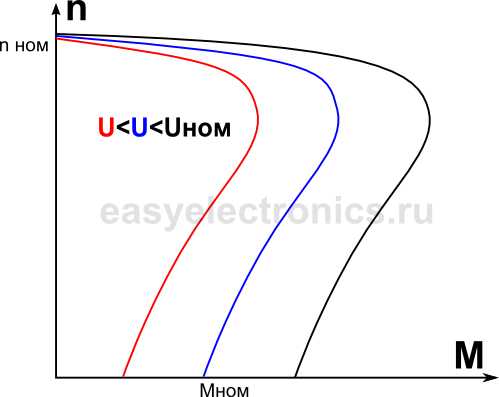
Снижение напряжения фазного дает лишь некоторое смягчение характеристики, с падением момента. Но обороты остаются в целом прежними.
Т.е. по простому скоростью не порулишь как хочется. Что делать? На помощь тут идет электроника и частотное регулирование. Т.е. мы сетевое напряжение сначала выпрямляем, а потом на инверторе вкручиваем любую частоту какая нам нужна. И профиты сплошные. выглядит это так:
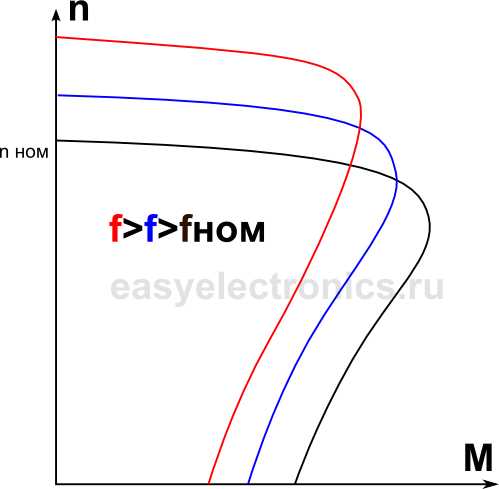
Но тут мы наблюдаем другую проблему — разгоняя частоту мы теряем в критическом моменте и снижается пусковой момент. Почему? А дело все в том, что поток завязан на частоту.
Если пренебречь падением напряжения на обмотках статора, то ЭДС примерно будет равна напряжению на фазах движка.
Uф≈K Φ f1
К — конструктивный коэффициент.
Т.е. у нас поток Ф зависит от частоты. Повышаем частоту и чтобы уравнение выполнялось должен снизиться поток, со всеми последствиями в виде провала по моменту.
Но что если заложить номинальную частоту в максимум возможного для данного двигателя, а регулировать вниз? Тут тоже проблемы возникнут. Поток будет расти, но бесконечно расти он не сможет, железо магнитопровода перенасытится и упадет КПД. Это просто энергетически невыгодно, зачем нам грелка, когда нужна крутилка?
Так что при изменении частоты не помешает и подкорректировать напряжение так, чтобы держать поток в пределах номинального, так потерь меньше.
▌Синхронный двигатель
Еще одна забавная машинка, работающая на вращающемся поле. Вспомним картинку вращающегося поля и сунем в ее чрево постоянный магнит.
Опа, магнит вращается синхронно полю. Механическую характеристику этого безобразия я даже не буду рисовать. Она скучна как пульс у трупа. Скорость жестко завязана на скорость поля и не зависит от момента, совсем. Абсолютно жесткая механическая характеристика.
Разумеется это не навсегда, если момент будет сильней поля, то он может оторвать его от поля, движок выпадет из синхронизма и настанет жопа — сам он в синхронный режим уже не вернется. Тут ситуация еще хуже чем с асинхронным двигателем. Синхронный двигатель даже нормально запуститься не сможет. Т.е. если его воткнуть в сеть то фиг он куда поедет, будет стоять и беспомощно дрыгаться. Вот такая, херня, малята.
Дети, давайте поможем дедушке двигателю стартануть! Что надо сделать? Правильно, Петя, надо подружить его с асинхронным двигателем — сунуть ему в нутро до кучи еще и беличью клетку. Это будет пусковая обмотка. Она рванет движок со старта, доведет его до подсинхронной частоты, а там он втянется в синхронизм как удав в пылесос. Правда момент такого пуска слабоват, но хоть что то. Но такие проблемы это геморрой еще прошлого века.
Сейчас есть новые, усовершенствованные методы старта синхронного двигателя. Потому, что у нас прогресс, модернизация в стране и нанотехнологии. В первую очередь я имею ввиду частотный пуск. Т.е. когда при старте поле статора не рвет с нуля на номинальные обороты, а нежно хватает движок за торчащие из ротора яй… эээ силовые линии магнитного поля и начинает плавно разгонять пока не выведет в номинал. Еще в начале может быть ориентирующий рывок, когда напряжение подается статично, на одну из фаз, чтобы придать ротору какой-то определенный ориентир, а дальше уже разгон.
Наиболее наглядно это можно увидеть на приводе шпинделя жесткого диска. Если у вас есть убитый жесткач, то разберите его и подайте питание на плату. Увидите, как движок плавно стартанет, но если его затормозить, то он встанет и будет лишь вяло вяло крутиться — выпал из синхронизма. Если сможете разогнать его до 7200 оборотов, то он втянется, и будет дальше вращаться как ни в чем не бывало.
Устранение этого недостатка может быть только одно — контроль положения ротора, т.е. система управления зорко глядит на то куда повернут ротор и не дает полю его упустить. Если движок нагружается, поле притормаживает, следуя за ротором так, чтобы получить наибольший момент. Способов следить много. Это и сельсины и датчики холла и энкодеры и оптика всякая. Есть еще и извращенские способы по замеру индукции на обмотке, что часто практикуется в модельных инверторах. И со всей этой тряхомудией это уже получается самый настоящий BLDC о которых я тоже когда-нибудь расскажу. Через пару лет, ага. Бугагага!
Регулирование синхронного двигателя сходно с асинхронным. Те же приколы связи частоты, потока и напряжения. Т.к. статор там точно такой же. Разве что скольжения нет, но есть критический момент, а он завязан на поток.
easyelectronics.ru
