Как устроен трехфазный асинхронный электродвигатель. Какие основные части входят в его конструкцию. На каком принципе основана работа асинхронного двигателя. Каковы преимущества и недостатки этого типа электродвигателей.
Конструкция трехфазного асинхронного электродвигателя
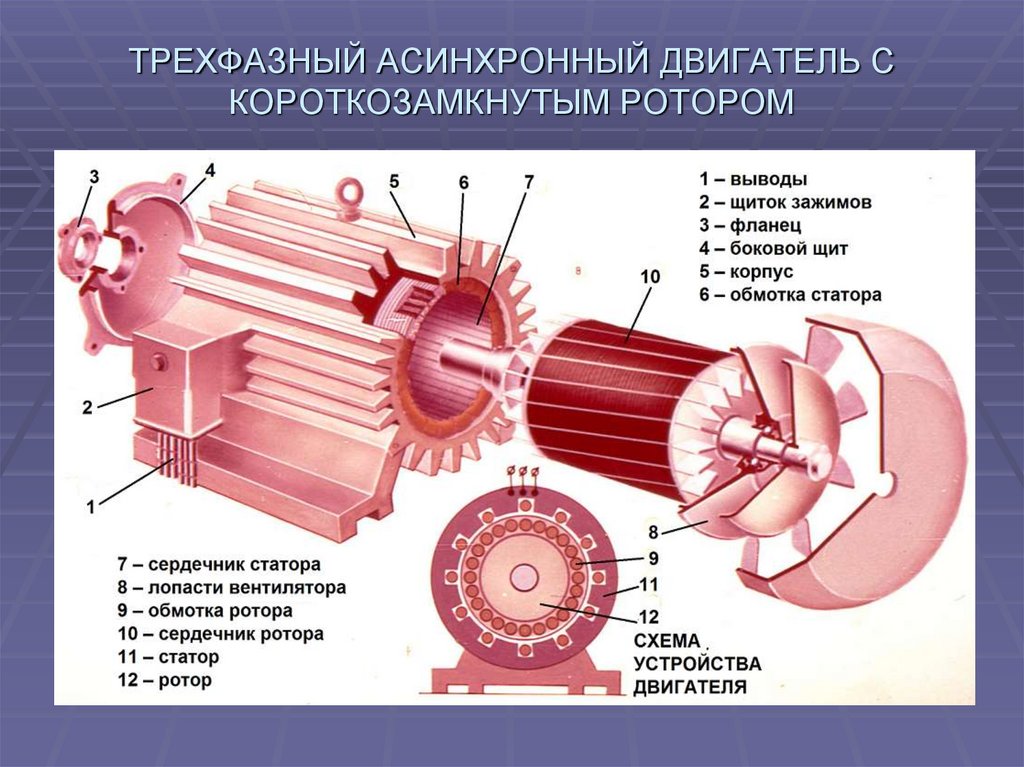
Трехфазный асинхронный электродвигатель состоит из двух основных частей:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
Статор представляет собой полый цилиндр, собранный из тонких стальных пластин. На внутренней поверхности статора располагаются пазы, в которые укладывается трехфазная обмотка. Обмотка статора подключается к трехфазной сети переменного тока.
Ротор имеет форму цилиндра, насаженного на вал. Он может быть двух типов:
- Короткозамкнутый — обмотка выполнена в виде алюминиевых стержней, замкнутых с торцов кольцами
- Фазный — на роторе размещена трехфазная обмотка, выведенная на контактные кольца
Между статором и ротором имеется небольшой воздушный зазор порядка 0,3-1 мм.
Принцип действия асинхронного электродвигателя
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и токов, индуцированных этим полем в обмотке ротора.
При подключении обмотки статора к трехфазной сети в ней возникает вращающееся магнитное поле. Это поле пересекает проводники обмотки ротора и индуцирует в них ЭДС. Под действием ЭДС в замкнутой обмотке ротора начинает протекать ток. Взаимодействие тока ротора с магнитным полем статора создает вращающий момент, приводящий ротор в движение.
Особенности вращения ротора
Скорость вращения магнитного поля статора называется синхронной и определяется по формуле:
n1 = 60f/p
где f — частота тока, p — число пар полюсов обмотки статора.
Ротор всегда вращается медленнее магнитного поля статора. Отставание ротора от поля статора называется скольжением и обозначается s:
s = (n1 — n2) / n1
где n2 — частота вращения ротора.
Именно из-за наличия скольжения двигатель называется асинхронным.
Преимущества трехфазных асинхронных двигателей
Трехфазные асинхронные электродвигатели получили широкое распространение благодаря ряду достоинств:

- Простота конструкции и высокая надежность
- Низкая стоимость
- Высокий КПД (до 95% у крупных двигателей)
- Хорошие пусковые свойства
- Возможность прямого подключения к сети
- Отсутствие коллектора и щеток
Эти преимущества обусловили широкое применение асинхронных двигателей в промышленности, на транспорте, в бытовой технике.
Недостатки асинхронных электродвигателей
Несмотря на множество достоинств, асинхронные двигатели имеют и некоторые недостатки:
- Сложность регулирования скорости вращения
- Небольшой пусковой момент у двигателей с короткозамкнутым ротором
- Относительно низкий коэффициент мощности, особенно при неполной нагрузке
- Большой пусковой ток (5-7 кратный по отношению к номинальному)
Однако современные системы управления позволяют в значительной степени компенсировать эти недостатки.
Типы асинхронных электродвигателей
Асинхронные электродвигатели классифицируют по нескольким признакам:
По числу фаз:
- Трехфазные
- Однофазные
По типу ротора:
- С короткозамкнутым ротором
- С фазным ротором
По числу скоростей:
- Односкоростные
- Многоскоростные
Наиболее распространены трехфазные асинхронные двигатели с короткозамкнутым ротором.
Области применения асинхронных двигателей
Асинхронные электродвигатели нашли применение в самых различных отраслях:
- Промышленные приводы (насосы, вентиляторы, компрессоры, конвейеры)
- Станки и инструменты
- Лифты и подъемные механизмы
- Бытовая техника (стиральные машины, холодильники)
- Электротранспорт (трамваи, троллейбусы, электровозы)
- Сельскохозяйственное оборудование
Широкое распространение асинхронных двигателей обусловлено их надежностью, экономичностью и простотой конструкции.
Регулирование скорости асинхронных двигателей
Существует несколько способов регулирования частоты вращения асинхронных электродвигателей:
- Изменение числа пар полюсов — реализуется в многоскоростных двигателях
- Изменение частоты питающего напряжения с помощью преобразователей частоты
- Изменение напряжения, подаваемого на статор
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным и распространенным в настоящее время является частотное регулирование с помощью преобразователей частоты.
Системы управления асинхронными двигателями
Для управления асинхронными электродвигателями применяются различные системы:
- Прямой пуск от сети
- Пуск через автотрансформатор или реактор
- Плавный пуск с помощью устройств плавного пуска
- Частотное регулирование
- Векторное управление
Выбор системы управления зависит от требований к электроприводу, условий эксплуатации и экономических факторов.
Энергоэффективность асинхронных двигателей
Повышение энергоэффективности асинхронных двигателей достигается следующими способами:
- Применение высококачественных электротехнических сталей
- Оптимизация геометрии активных частей
- Использование медных роторов вместо алюминиевых
- Снижение механических потерь
- Применение частотно-регулируемого привода
Современные энергоэффективные асинхронные двигатели имеют КПД до 96% и более.
Диагностика и обслуживание асинхронных электродвигателей
Для обеспечения надежной работы асинхронных двигателей необходимо проводить их регулярную диагностику и обслуживание:
- Периодический осмотр и очистка
- Контроль сопротивления изоляции обмоток
- Проверка состояния подшипников
- Балансировка ротора
- Вибродиагностика
- Анализ токов и напряжений
Своевременное обслуживание позволяет выявить неисправности на ранней стадии и предотвратить выход двигателя из строя.

Перспективы развития асинхронных электродвигателей
Основные направления совершенствования асинхронных двигателей:
- Повышение энергоэффективности
- Улучшение массогабаритных показателей
- Расширение диапазона регулирования скорости
- Интеграция с системами управления
- Применение новых материалов
- Развитие методов диагностики
Асинхронные двигатели продолжают оставаться основным типом электропривода в промышленности и быту. Их совершенствование позволит повысить эффективность использования электроэнергии.
Строение электродвигателя и его особенности
Электродвигатель – это устройство, назначение которого преобразовывать энергию электрическую в энергию механическую. Его главными элементами, которые помогают выполнять данное условие, являются ротор и статор. При этом, ротор – это вращающийся компонент двигателя, в то время как статор находится в неподвижном состоянии. Благодаря подаваемому напряжению возникает электромагнитное поле, которое и вращает ротор, выполняя механические действия. В зависимости о того, какие принципы используются в устройстве электродвигателей, их различают по следующим параметрам:
- По типу питания:
- Электродвигатели постоянного тока, работающие от блоков питания, аккумуляторных батарей и прочих источников;
- Электродвигатели переменного тока, работающие от электрических сетей.
- По принципу работы:
- Синхронные, состоящие из обмоток на роторе и щёточного механизма, предназначенного для подачи электрического тока на эти же обмотки;
- Асинхронные двигатели, не имеющие на роторе ни щёток, ни обмоток.
 Скорость вращения такого мотора медленнее, чем у созданного магнитного поля статора, что отличается от синхронных.
Скорость вращения такого мотора медленнее, чем у созданного магнитного поля статора, что отличается от синхронных.
На сегодняшний день, любой каталог электродвигателей имеет в своём наборе больше агрегатов асинхронного действия. В корпусе такого двигателя установлены обмотки статора, создающие при вращении магнитное поле. Для охлаждения такой системы используется вентилятор, устанавливаемый на конце вала электродвигателя. При этом понятно, что вал и ротор являются одним целым. Изготовляется он из металлических, замкнутых между собой с обеих сторон стержней. Такая конструкция считается самой долговечной, надёжной и безотказной. Поэтому, если поломки и возникают, то это получается не из-за износа стержней, а через короткие замыкания либо износ подшипников.
Если же необходимо вращение в постоянной скорости с возможностью её регулировки, особенно в бытовых условиях, используют синхронный электродвигатель, работающий на переменном токе.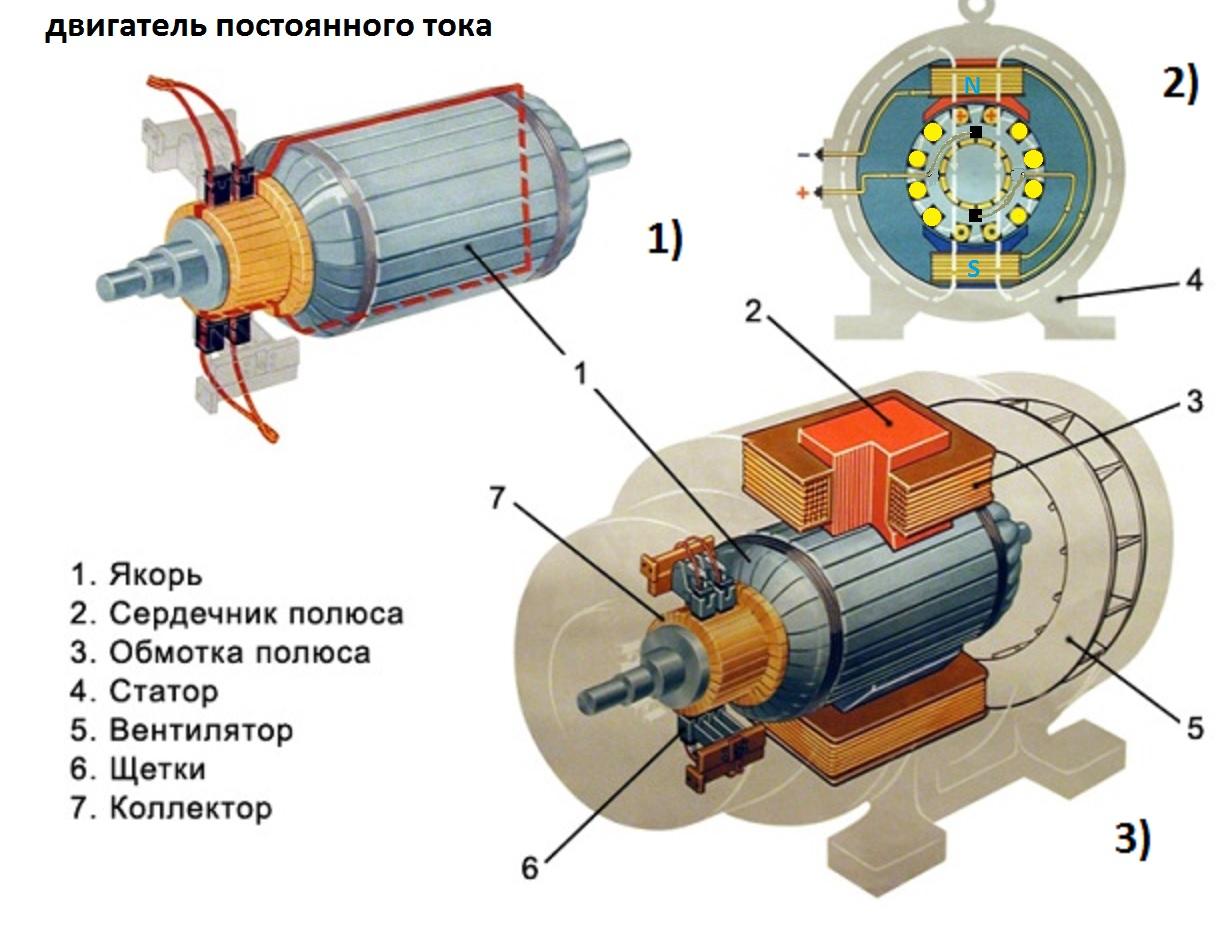 Этот тип двигателя, не превосходит асинхронный в системе защиты от перепадов напряжения, коротких замыканий и прочих воздействий, поэтому, применяемая система плавного пуска электродвигателя здесь будет так же обязательным условием. Состоит синхронный двигатель из следующих элементов:
Этот тип двигателя, не превосходит асинхронный в системе защиты от перепадов напряжения, коротких замыканий и прочих воздействий, поэтому, применяемая система плавного пуска электродвигателя здесь будет так же обязательным условием. Состоит синхронный двигатель из следующих элементов:
- металлический корпус;
- обмотки полюса;
- ротор или якорь, на котором имеются обмотки;
- коллектор или токосъёмное кольцо, к которым припаяны выводы с упомянутых выше обмоток;
- графитовые стержни, передающие напряжение на коллектор.
В процессе работы синхронного двигателя между потоком магнитных полей в обмотке возбуждения и током ротора возникает взаимодействие, которое создаёт вращающий момент. Если выполнять смену направления тока, будет выполняться и смена направления магнитных потоков. Это явление будет поддерживать вращение вала в одном и том же направлении. Для смены скорости таких двигателей, прежде всего, используют метод изменения напряжения, подаваемого в определённой величине на электродвигатель. Благодаря видоизменениям конструкций и мощностным показателям, двигатели переменного тока представлены к продаже в самом разнообразном модельном ряде, позволяющим использовать приводы не только в промышленных целях, но и бытовых, сельскохозяйственных и многих прочих.
Благодаря видоизменениям конструкций и мощностным показателям, двигатели переменного тока представлены к продаже в самом разнообразном модельном ряде, позволяющим использовать приводы не только в промышленных целях, но и бытовых, сельскохозяйственных и многих прочих.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Принцип работы электродвигателя – HiSoUR История культуры
Электродвигатель представляет собой электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях генерируются магнитные поля с токопроводящими проводниками, взаимные силы притяжения и отталкивания которых приводятся в движение. Таким образом, электродвигатель является аналогом очень аналогичного сконструированного генератора, который преобразует мощность двигателя в электрическую. Электродвигатели обычно генерируют вращающиеся движения, но они также могут использоваться для создания трансляционных движений (линейный привод). Электродвигатели используются для управления многими оборудованием, машинами и транспортными средствами.
Электродвигатели обычно генерируют вращающиеся движения, но они также могут использоваться для создания трансляционных движений (линейный привод). Электродвигатели используются для управления многими оборудованием, машинами и транспортными средствами.
Принцип действия
Электродвигатели – это устройства, которые преобразуют электрическую энергию в механическую энергию. Средствами этого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Основной принцип заключается в том, что описание того, как сила вызвано взаимодействием точечного электрического заряда q в электрическом и магнитном полях, является законом Лоренца:
где:
q: пунктуальный электрический заряд
E: Электрическое поле
v: скорость частиц
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E.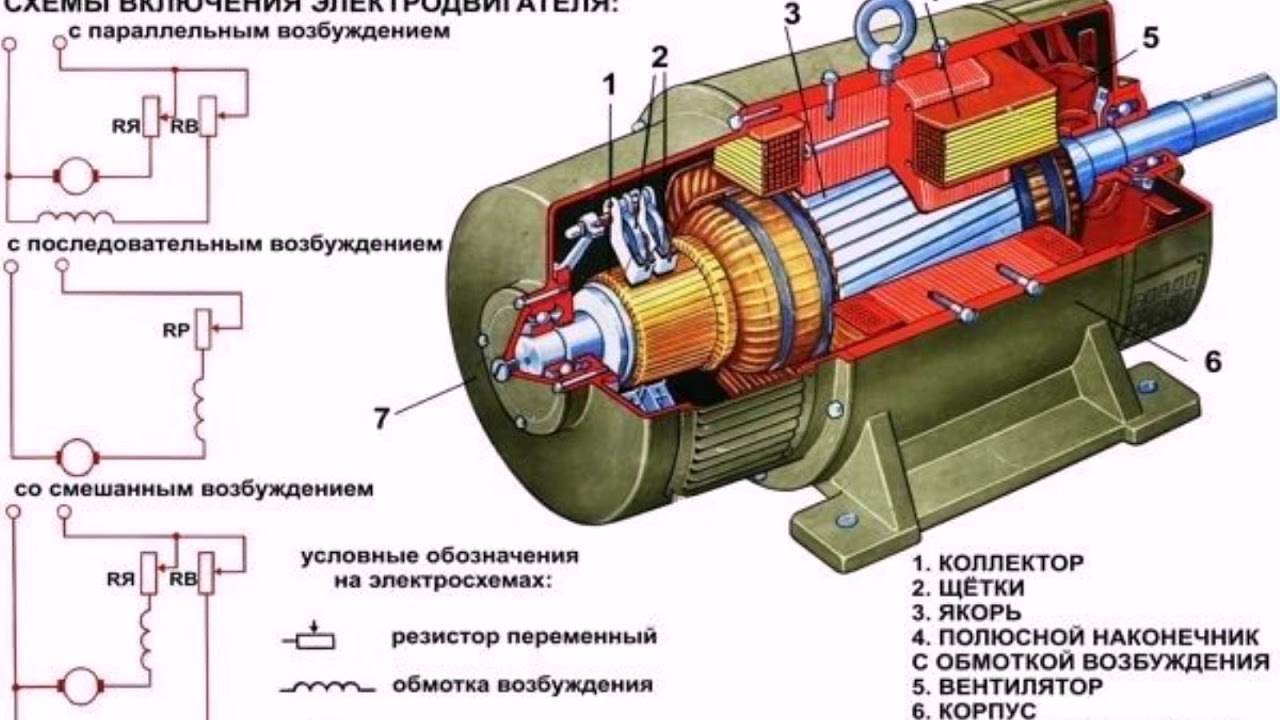 Это кулоновская сила действует вдоль проводника, создающего электрический поток, например, в катушках статора индукционных машин или в роторе двигателей постоянного тока.
Это кулоновская сила действует вдоль проводника, создающего электрический поток, например, в катушках статора индукционных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью нагрузки v. Эта сила перпендикулярна магнитному полю и направлению скорости нагрузки. Обычно в движении имеется много нагрузок, поэтому удобно переписать выражение в терминах плотности заряда Fv (сила в единице объема):
К продукту он известен как плотность тока J (ампер на квадратный метр):
Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, объясняющий, как возникают силы в электромеханических системах, таких как электродвигатели. Однако полное описание для каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель – это по существу любой электродвигатель, который был «разворачиван», так что вместо создания крутящего момента (вращения) он создает прямолинейную силу вдоль своей длины.
Линейные двигатели чаще всего являются асинхронными двигателями или шаговыми двигателями. Линейные двигатели обычно встречаются во многих роликовых подстаканниках, где быстрое движение безмоторного вагона контролируется рельсом. Они также используются в поездах маглева, где поезд «летает» над землей. В меньших масштабах, в 1985 году эскалатор HP 7225A использовал два линейных шаговых двигателя для перемещения пера вдоль осей X и Y.
электромагнетизм
Сила и момент
Основная цель подавляющего большинства мировых электродвигателей состоит в том, чтобы электромагнитно индуцировать относительное перемещение в воздушном зазоре между статором и ротором для получения полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила обмоточного проводника может быть задана просто:
или в более общем плане, для обработки проводников с любой геометрией:
Наиболее общие подходы к вычислению сил в двигателях используют тензоры.
Мощность
Где rpm – скорость вала, а T – момент, механическая мощность двигателя Pem определяется,
в британских единицах с Т, выраженным в фунтах,
(лошадиная сила), и,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и Т, выраженной в Ньютонометрах,
(Вт).
Для линейного двигателя с силой F, выраженной в ньютонах и скоростью v, выраженной в метрах в секунду,
(Вт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора, пренебрегая скин-эффектом, определяется следующим:
, где
Rr – сопротивление ротора
I r 2 – квадрат тока, индуцированного в роторе
s – проскальзывание двигателя; т.е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Назад emf
Так как обмотки якоря постоянного тока или универсального двигателя движутся через магнитное поле, они имеют индуцированное в них напряжение. Это напряжение имеет тенденцию противостоять напряжению питания двигателя и поэтому называется «назад электродвижущей силой (ЭДС)». Напряжение пропорционально скорости движения двигателя.Задняя ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны быть равны напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; результаты обратной волны в нижней части спины, и больше тока извлекается из питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для баланса новой нагрузки.
Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; результаты обратной волны в нижней части спины, и больше тока извлекается из питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для баланса новой нагрузки.
В компьютерах с переменным током иногда полезно учитывать источник обратной волны emf в машине; в качестве примера это вызывает особую озабоченность по поводу тесного регулирования скорости асинхронных двигателей на VFD.
потери
Потери двигателя связаны главным образом с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также возникают аэродинамические потери, особенно там, где присутствуют охлаждающие вентиляторы.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета эффективности двигателя механическая выходная мощность делится на электрическую входную мощность:
,
где является эффективность преобразования энергии, электрическая входная мощность, и механическая выходная мощность:
где это входное напряжение, входной ток, T – выходной крутящий момент, и – выходная угловая скорость. Аналитически можно получить точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента.
Аналитически можно получить точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента.
Различные регулирующие органы во многих странах внедрили и внедрили законодательство, поощряющее производство и использование электродвигателей с более высокой эффективностью.
Коэффициент добротности
Эрик Лайтвейт предложил метрику, чтобы определить «доброту» электродвигателя:
Куда:
коэффициент добротности (коэффициенты выше 1, вероятно, будут эффективными)
– площади поперечного сечения магнитной и электрической цепи
представляют собой длины магнитных и электрических цепей
является проницаемость сердечника
– это угловая частота, с которой двигатель
Из этого он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса. Однако это уравнение относится только к моделям без ПМ.
Параметры производительности
Момент затяжки моторов
Все электромагнитные двигатели, которые включают в себя упомянутые здесь типы, вызывают крутящий момент от векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. Как только они были установлены путем математического анализа с использованием FEA или других инструментов, крутящий момент можно вычислить как интеграл всех векторов силы, умноженных на радиус каждого вектора. Ток, текущий в обмотке, создает поля, а для двигателя с использованием магнитного материала поле не линейно пропорционально току. Это затрудняет вычисление, но компьютер может выполнить многие расчеты.
Для расчета крутящего момента необходимо знать поля в воздушном зазоре. Как только они были установлены путем математического анализа с использованием FEA или других инструментов, крутящий момент можно вычислить как интеграл всех векторов силы, умноженных на радиус каждого вектора. Ток, текущий в обмотке, создает поля, а для двигателя с использованием магнитного материала поле не линейно пропорционально току. Это затрудняет вычисление, но компьютер может выполнить многие расчеты.
Как только это будет сделано, цифра, связывающая ток с крутящим моментом, может использоваться как полезный параметр для выбора двигателя. Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя это, как правило, будет использоваться только до тех пор, пока термические соображения не будут иметь приоритет.
При оптимальном проектировании в пределах заданного ограничения насыщения ядра и для заданного активного тока (т. Е. Крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности потока воздушного зазора все категории электродвигателей или генераторы будут демонстрировать практически такой же максимальный непрерывный крутящий момент вала (т. е. рабочий крутящий момент) в заданной области воздушного зазора с обмотками и глубиной заднего железа, которая определяет физические размеры электромагнитного сердечника. В некоторых приложениях требуется крутящий момент за максимальный рабочий крутящий момент, такой как короткие всплески крутящего момента для ускорения электромобиля от остановки. Всегда ограниченные насыщением магнитного сердечника или безопасным повышением температуры и напряжением, способность к крутящим моментам за пределы максимального рабочего момента значительно отличается между категориями электродвигателей или генераторов.
Е. Синхронной скорости) и плотности потока воздушного зазора все категории электродвигателей или генераторы будут демонстрировать практически такой же максимальный непрерывный крутящий момент вала (т. е. рабочий крутящий момент) в заданной области воздушного зазора с обмотками и глубиной заднего железа, которая определяет физические размеры электромагнитного сердечника. В некоторых приложениях требуется крутящий момент за максимальный рабочий крутящий момент, такой как короткие всплески крутящего момента для ускорения электромобиля от остановки. Всегда ограниченные насыщением магнитного сердечника или безопасным повышением температуры и напряжением, способность к крутящим моментам за пределы максимального рабочего момента значительно отличается между категориями электродвигателей или генераторов.
Емкость для всплесков крутящего момента не следует путать с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределы заданной частоты возбуждения. Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с регулируемыми по току полям и, следовательно, не может быть достигнуто с помощью двигателей с постоянными магнитами.
Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с регулируемыми по току полям и, следовательно, не может быть достигнуто с помощью двигателей с постоянными магнитами.
Электрические машины без топологии трансформаторной схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента выше максимального расчетного момента без насыщения магнитного сердечника и любого увеличения тока как бесполезного. Кроме того, блок ПМСМ с постоянными магнитами может быть поврежден непоправимо, если попытки всплесков крутящего момента превышают максимальный крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как индукционные машины, индукционные двухкомпонентные электрические машины, а также индукционные или синхронные машины с двунаправленным раневым ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС, на любом стороны трансформатора противостоят друг другу и, таким образом, не влияют на плотность магнитного потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению ядра.
Электрические машины, которые полагаются на индукционные или асинхронные принципы, замыкают один порт схемы трансформатора, и в результате реактивный импеданс трансформаторной цепи становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (то есть реального) тока. Тем не менее реализуются всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент.
Синхронная двухсторонняя машина (BWRSDF) с бесколлекторным раневым ротором является единственной электрической машиной с истинно двухполярной топологией трансформаторной схемы (т.е. оба порта независимо возбуждены без короткого замыкания). Известно, что топология схемы с двумя портированными трансформаторами нестабильна и требует многофазного узла щетки скольжения для распространения ограниченной мощности на комплект обмотки ротора. Если бы имелись прецизионные средства для мгновенного регулирования угла крутящего момента и скольжения для синхронной работы во время движения или генерации при одновременном обеспечении бесщеточной мощности на намотке ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления схемы трансформатора и значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины. Рассчитаны крутящие моменты, превышающие восьмикратный рабочий крутящий момент.
Рассчитаны крутящие моменты, превышающие восьмикратный рабочий крутящий момент.
Плотность непрерывного крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером зоны воздушного зазора и глубиной заднего железа, которые определяются степенью мощности набора обмоток якоря, скоростью машины и достижимыми характеристиками воздушно- плотность потока зазоров до насыщения ядра. Несмотря на высокую коэрцитивность постоянных магнитов неодима или самария-кобальта, постоянная плотность крутящего момента практически одинакова среди электрических машин с оптимально разработанными намотками арматуры. Непрерывная плотность крутящего момента относится к способу охлаждения и допустимого периода эксплуатации перед разрушением при перегреве обмоток или повреждении постоянным магнитом.
Другие источники утверждают, что различные топологии e-machine имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM – бесщеточный переменного тока, токовая проводимость 180 ° | 1,0 |
| SPM – бесщеточный переменного тока, токовая проводимость 120 ° | 0.9-1.15 |
| IM, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, машина с удвоенным показателем сопротивления | 0,7-1,0 |
где – удельная плотность крутящего момента нормализована до 1,0 для SPM – бесщеточный переменного тока, токовая проводимость 180 °, SPM – машина для поверхностного постоянного магнита.
Плотность крутящего момента примерно в четыре раза больше для электродвигателей, которые охлаждаются жидкостью, по сравнению с воздушными охлаждением.
Источник сравнения постоянного тока (DC), асинхронных двигателей (IM), синхронных двигателей с постоянными магнитами (PMSM) и переключаемых двигателей с сопротивлением (SRM) показал:
| Характеристика | Округ Колумбия | Я | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Удельная мощность | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами до 1 МВт имеют значительно более высокую плотность крутящего момента, чем индукционные машины.
Непрерывная плотность мощности
Непрерывная плотность мощности определяется продуктом непрерывной плотности крутящего момента и постоянным диапазоном крутящего момента электрической машины.
Специальные магнитные двигатели
ротационный
Безрулевой или бесколлекторный роторный двигатель
Ничто в принципе ни одного из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора фактически вращались. Если мягкий магнитный материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Воспользовавшись этим фактом, используется бесконтактный или безредукторный двигатель постоянного тока, специализированный вариант постоянного двигателя постоянного тока. Оптимизированные для быстрого ускорения, эти двигатели имеют ротор, который построен без какого-либо железного сердечника. Ротор может иметь форму намоточного цилиндра или самонесущую конструкцию, содержащую только магнитную проволоку и связующий материал. Ротор может помещаться внутри магнитов статора; магнитно-мягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Вторая компоновка имеет корзину намотки ротора, окружающую магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по массе, чем обычный ротор, образованный из медных обмоток на стальных ламинатах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени в течение одного мс. Это особенно верно, если на обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, чтобы действовать как теплоотвод, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для бесконтактных двигателей постоянного тока. Современное программное обеспечение, такое как Motor-CAD, может помочь увеличить тепловой КПД двигателей, хотя и находится на стадии проектирования.
Среди этих типов – типы дисков-роторов, более подробно описанные в следующем разделе.
Вибрирующий сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также дискообразные типы, которые имеют тонкий многополярный магнит на диске, и преднамеренно неуравновешенную формованную пластиковую роторную структуру с двумя связанными бесколлекторными катушками. Металлические щетки и плоский коммутатор переключаются на катушки ротора.
Связанные приводы с ограниченным ходом не имеют сердечника и связанной катушки, размещенной между полюсами тонких постоянных магнитов с высоким потоком. Это быстрые позиционеры для жестких дисков (жестких дисков). Хотя современный дизайн значительно отличается от современного громкоговорителя, он все еще свободно (и неправильно) называется структурой «звуковой катушки», поскольку некоторые более ранние жесткие диски с дисковым накопителем перемещаются по прямым линиям и имеют структуру привода, громкоговорителя.
Блин или осевой роторный двигатель
Печатный якорь или двигатель блинчика имеют обмотки в виде диска, работающего между массивами магнитов с высоким потоком. Магниты расположены в окружности, обращенной к ротору, с промежутком между ними, чтобы образовать осевой воздушный зазор. Эта конструкция широко известна как двигатель блинчика из-за ее плоского профиля. У технологии было много фирменных наименований с момента ее создания, например ServoDisc.
Печатная арматура (первоначально сформированная на печатной плате) в печатном двигателе якоря выполнена из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска.Печатная арматура имеет уникальную конструкцию в мире мостового мотора, поскольку она не имеет отдельного кольцевого коммутатора. Щетки запускаются непосредственно на поверхности якоря, что делает весь дизайн очень компактным.
Альтернативным методом изготовления является использование намотанной медной проволоки, уложенной плоской с центральным обычным коммутатором, в форме цветка и лепестка. Обмотки обычно стабилизируются с помощью электрических систем эпоксидной заливки. Это наполненные эпоксиды, которые имеют умеренную, смешанную вязкость и длительное время гелеобразования. Они выделяются низкой усадкой и низкой экзотермией и обычно UL 1446 признаются в качестве заливающего компаунда, изолированного по 180 ° C, класса H.
Уникальным преимуществом бесщеточных двигателей постоянного тока является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он абсолютно невозможен, хотя железные роторы ламинируются. Это может значительно повысить эффективность, но контроллеры с переменной скоростью должны использовать более высокую скорость переключения (& gt; 40 кГц) или постоянный ток из-за пониженной электромагнитной индукции.
Эти двигатели были первоначально изобретены для привода ведущих магнитных ленточных накопителей, где минимальное время для достижения рабочей скорости и минимальной остановки было критическим. Масляные моторы широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию доступных конструкций технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) – использовать один статор, зажатый между двумя роторами. Одна такая конструкция обеспечивала максимальную мощность 15 кВт / кг, устойчивую мощность около 7,5 кВт / кг. Этот беспилотный двигатель с осевым потоком имеет более короткий путь потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой обмотки; 100 процентов обмоток активны. Это усиливается благодаря использованию медной проволоки прямоугольного сечения. Двигатели могут быть сложены для параллельной работы.Нестабильность сводится к минимуму за счет того, что два диска ротора накладывают равные и противоположные силы на диск статора. Роторы соединены непосредственно друг с другом через кольцо вала, отменяя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (5,9 дюйма на 17 футов 8,6 дюйма).
Серводвигатель
Сервомотор – это двигатель, который часто продается как полный модуль, который используется в системе управления с обратной связью по положению или скорости.Сервомоторы используются в таких применениях, как станки, пленочные плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизме, должны иметь хорошо документированные характеристики для скорости, крутящего момента и мощности. Кривая скорости и крутящего момента очень важна и имеет высокое соотношение для серводвигателя. Также важны динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность петли сервомеханизма. Большие, мощные, но медленно реагирующие серво-петли могут использовать обычные двигатели переменного или постоянного тока и системы привода с обратной связью по положению или скорости на двигателе. По мере увеличения требований к динамическому реагированию используются более специализированные конструкции двигателей, такие как бесконтактные двигатели.Превосходные характеристики мощности и ускорения электродвигателей переменного тока по сравнению с двигателями постоянного тока имеют тенденцию поддерживать синхронные приводы с постоянным магнитом, BLDC, индукционные и SRM-приводы.
Сервосистема отличается от некоторых применений шагового двигателя тем, что обратная связь по положению постоянно, пока двигатель работает. Шаговая система по своей сути работает с разомкнутым контуром – полагаясь на двигатель, чтобы не «пропустить шаги» для краткосрочной точности – с любой обратной связью, такой как «домашний» переключатель или датчик положения, являющийся внешним по отношению к двигательной системе. Например, при запуске типичного компьютерного принтера с точечной матрицей его контроллер превращает привод шагового двигателя печатающей головки в его левый предел, где датчик положения определяет исходное положение и останавливается. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели являются часто используемым двигателем, когда требуются точные вращения. В шаговом двигателе внутренний ротор, содержащий постоянные магниты или магнитно-мягкий ротор с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель можно также рассматривать как крест между электродвигателем постоянного тока и ротационным соленоидом. Когда каждая катушка включается поочередно, ротор выравнивается с магнитным полем, создаваемым обмоткой возбужденного поля. В отличие от синхронного двигателя, при его применении шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» – начинается, а затем быстро останавливается снова – от одного положения к другому, когда обмотки возбуждения возбуждаются и обесточиваются последовательно. В зависимости от последовательности ротор может поворачиваться вперед или назад, и он может в любое время изменять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шагового двигателя полностью активируют или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому колесу» к ограниченному числу положений;более сложные драйверы могут пропорционально управлять мощностью обмоток поля, позволяя роторам располагаться между точками зубчатого колеса и тем самым вращаться чрезвычайно плавно. Этот режим работы часто называют микрошагом. Управляемые компьютером шаговые двигатели являются одной из самых универсальных форм позиционирующих систем, особенно в части цифровой сервоуправляемой системы.
Шаговые двигатели можно легко поворачивать под определенным углом дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах гибких дисков. Они использовались с той же целью в компьютерных дисках в эпоху до гигабайта, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи на жестком диске.По мере увеличения плотности дисков ограничения скорости и скорости шаговых двигателей сделали их устаревшими для жестких дисков – ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными, поэтому новые жесткие диски используют системы с головным приводом с голосовой катушкой. (Термин «звуковая катушка» в этой связи является историческим, он относится к структуре в типичном (коническом) громкоговорителе. Эта структура использовалась некоторое время для размещения головок. Современные приводы имеют поворотную катушку, катушки качания назад и вперед, что-то вроде лопасти вращающегося вентилятора. Тем не менее, как звуковая катушка, современные проводники катушки привода (магнитный провод) движутся перпендикулярно силовым линиям магнитного поля.)
Шаговые двигатели использовались и по-прежнему часто используются в компьютерных принтерах, оптических сканерах и цифровых фотокопировальных устройствах для перемещения оптического сканирующего элемента, каретки печатающей головки (точечной матрицы и струйных принтеров) и валиков или подающих роликов. Аналогично, многие компьютерные плоттеры (которые с начала 1990-х годов были заменены крупноформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с замкнутым контуром.
Так называемые кварцевые аналоговые наручные часы содержат наименьшие обычные шаговые двигатели; они имеют одну катушку, набирают очень мало энергии и имеют постоянный магнитный ротор. Такой же двигатель работает от кварцевых часов с батарейным питанием. Некоторые из этих часов, например, хронографы, содержат более одного шагового двигателя.
Тесно связанные с проектированием трехфазные синхронные двигатели переменного тока, шаговые двигатели и SRM классифицируются как тип двигателя с переменным сопротивлением. Шаговые двигатели были и остаются часто используемыми в компьютерных принтерах, оптических сканерах и компьютерах с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резцы и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда.Обычно электростатические двигатели сочетаются с обычными моторами на катушках.Обычно они требуют высоковольтного источника питания, хотя очень маленькие двигатели используют более низкие напряжения. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют большого тока при низких напряжениях. В 1750-е годы первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном. Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (МЭМС), где их приводные напряжения составляют менее 100 вольт, а движущиеся заряженные пластины намного легче изготавливать, чем катушки и железные сердечники. Кроме того, молекулярный механизм, который управляет живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезомотор – это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для того, чтобы сделать ряд растяжек и удерживание положения, подобно тому, как движется гусеница.
В двигательной силовой установке с электрическим приводом используется технология электродвигателей для запуска космических аппаратов в космическом пространстве, причем большинство систем основано на электрическом питании пропеллента на высокой скорости, причем некоторые системы основаны на принципах электродинамической привязки движений к магнитосфере.
Электродвигатель постоянного тока. Принцип действия и устройство. – www.motors33.ru
На рис. 1-1 представлена простейший электродвигатель постоянного тока, а на рис. 1-2 дано его схематическое изображение в осевом направлении. Неподвижная часть двигателя, называемая индуктор, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в электродвигателе основного магнитного потока. Индуктор изображенной на рис. 1-1 имеет два полюса 1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу цилиндрического якоря 2 и коллектора. 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанном на рис. 1-1 и 1-2 простейшем электродвигателе имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. На коллектор налегают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных электродвигателях постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
Рис. 1-1. Простейший электродвигатель постоянного тока
Рис. 1-2. Работа простейшего электродвигателя постоянного тока в режиме генератора (а) и двигателя (б).
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по «правилу правой руки» и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Двигатель постоянного тока.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
Устройство и принцип работы электроинструмента
Содержание:
- 1. Коллекторный электродвигатель постоянного тока
- 1.1. Принцип действия
- 1.2. Недостатки
- 2. Бесколлекторный двигатель
- 3. Редуктор
- 3.1. Особенности редукторов
- 4. Устройства управления
- 5. Для безопасной работы
Двигатель, редуктор, устройства управления и детали для безопасной работы — вот основные узлы каждого электроинструмента. Для ручной машины важно, что бы она была как можно легче и меньше. Кроме того, от нее требуется высокая скорость, которую можно регулировать. Этим условиям отвечают двигатели постоянного тока. Они подразделяются на коллекторные и вентильные.
Коллекторный электродвигатель постоянного тока
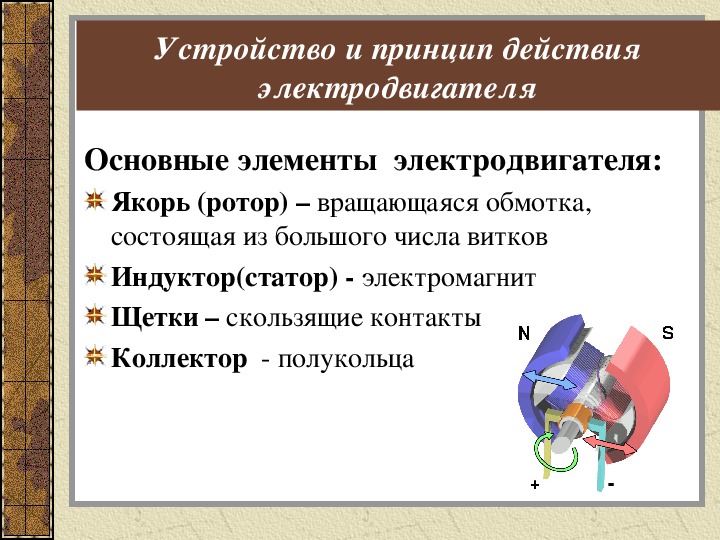
Что бы понять, как электрическая энергия превращается в механическую, познакомимся с устройством двигателя. Его основные узлы: статор (индуктор), ротор (якорь) и примыкающий к нему щеточноколлекторный узел.
Статор — неподвижная стальная деталь, к которой прикрепляются главные и добавочные полюсы. Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Вращающийся ротор устанавливается на валу. Он состоит из сердечника и обмотки. Ее концы соединяются с пластинами коллектора, к которому, в свою очередь, примыкают щетки — через них обмотка якоря соединяется с внешней цепью. Щетки занимают определенное положение по отношению к полюсам двигателя. В некоторых электроинструментах имеется поворотный щеткодержатель-траверса, благодаря ему положение щеток можно изменять. Это позволяет сохранить мощность при работе в режиме реверса. В остальных случаях вращение в обратном режиме включают электронные магнитные пускатели.
Принцип действия
Двигатель работает за счет электромагнитной индукции. При подаче напряжения на графитовые щетки, они замыкаются с ротором. По его обмотке проходит электрический ток. Так как ротор находится внутри магнитного поля статора, на него начинают действовать силы Ампера. На концах якоря они направлены в противоположные стороны, что создает крутящий момент. Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Частота вращения двигателя регулируется за счет изменения магнитного поля статора, которое в свою очередь генерируется током возбуждения двигателя. На этот ток можно повлиять реостатом, транзистором, т. е. любым устройством с активным сопротивлением. Таким образом, осуществляется электронная регулировка скорости.
Недостатки
Слабое место коллекторного двигателя — графитовые щетки, в процессе эксплуатации они истираются. При интенсивной нагрузке их приходится часто заменять. Кроме того, такой двигатель шумит и вибрирует во время работы, особенно на больших скоростях. Бороться с этими недостатками помогает использование в конструкциях качественных деталей и внешних антивибрационных элементов.
Бесколлекторный двигатель
Существует вид двигателей постоянного тока, в которых отсутствует щеточно-коллекторный узел. Ток в них изменяется с помощью электронных переключателей, что избавляет конструкцию от наличия щеток. Такие моторы называют вентильными. Принцип их работы аналогичен описанному выше. От коллекторных их отличает конструкция: магниты размещены на роторе, а обмотка на статоре.
Датчик углового положения ротора указывает электронному блоку, когда нужно менять направление тока. Единственный недостаток вентильного двигателя — дорогостоящие детали. По этой причине в ручных электроинструментах в основном используются коллекторные двигатели, с вентильным — лишь единичные модели: компании Makita и Hitachi предлагают аккумуляторные ударные шуруповерты, называя их инструментами будущего.
Редуктор
Механическую энергию, которую вырабатывает двигатель, нужно передать на рабочий орган машины (шпиндель). Эту функцию выполняет редуктор. Часто его называют понижающим. Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
В ручных машинах применяют разнообразные виды механических передач: зубчатая, ременная, цепная, планетарная. В большинстве случаев на выходе получается вращение. Но есть инструменты, в которых этот вид движения преобразуется в другой.
Ударный механизм перфоратора работает следующим образом. На валу установлен «пьяный» подшипник — качающийся привод, которой преобразует вращательное движение от двигателя в поступательное — цилиндра. В пространстве между цилиндром, поршнем и бойком, находится воздух. Он сжимается и заставляет поршень перемещаться сначала вперед к бойку, а затем возвращает его в исходное положение.
Редуктор электролобзика преобразует вращение вала двигателя в возвратно-поступательное движение ползуна. Расположенный вертикально ползун перемещает пилку вниз и вверх. Пилка опирается на опорный ролик. Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
В вибрационных шлифмашинах эксцентрик, установленный на валу, так преобразует вращательное движение, что подошва всего лишь колеблется с маленькой амплитудой. В эксцентриковых шлифовальных машинах вращательное движение рабочего органа сохраняется, но эксцентрик добавляет ему колебания. Такие преобразования позволяют выполнять с помощью этих инструментов тонкую шлифовку.
Особенности редукторов
Для пользователя имеет значение, из каких деталей изготовлен редуктор, от этого зависит его надежность и срок службы всего электроинструмента. В моделях бытового класса часто используются шестерни из пластмассы, в профессиональных — редуктор полностью металлический. Преимуществом считается, если и корпус то же выполнен из металла. В этом случае инструмент лучше выдерживает большие нагрузки и удары.
Важной функцией, которую может выполнять редуктор, является ступенчатое изменение частоты вращения выходного вала. Она доступна на отдельных моделях дрелей, шуруповертов. Механическое переключение скоростей позволяет работать с меньшей скоростью и большим крутящим моментом на первой передаче и с более высоким числом оборотов — на второй. Если сравнить технические характеристики в цифрах, то можно сразу заметить, что инструменты с двухскоростным (трехскоростные встречаются редко) редуктором отличаются большим числом оборотов по сравнению с обычными моделями, в которых обороты регулируются только электроникой. Эта особенность обеспечивает высокую производительность и оптимальный подбор режима работы.
Устройства управления
Для питания двигателя в электроинструментах используются различные схемы, в том числе микропроцессорные электроприводы. Обязательным элементом любой системы является выпрямитель. Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Скорость вращения регулирует преобразователь частоты. Самый простой его вариант — это несколько реле, с помощью которых число оборотов можно установить вручную. В систему так же могут входить магнитные пускатели с кнопкой для изменения направления вращения двигателя (функция реверса). Устройство управления двигателем размещают под рукояткой или вблизи нее, где на корпус выводятся курок-выключатель, колесико регулировки скорости, кнопка реверса.
Для безопасной работы
К ручным инструментам предъявляются особые требования, связанные с безопасностью работы. Электропроводящие детали покрывают специальным материалом для защиты пользователя от поражения током. Многие производители, кроме основной изоляции, на случай ее повреждения, применяют дополнительную, получая, таким образом, двойную. Остальные защитные устройства, такие как муфты, фиксаторы применяются в зависимости от вида инструмента.
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
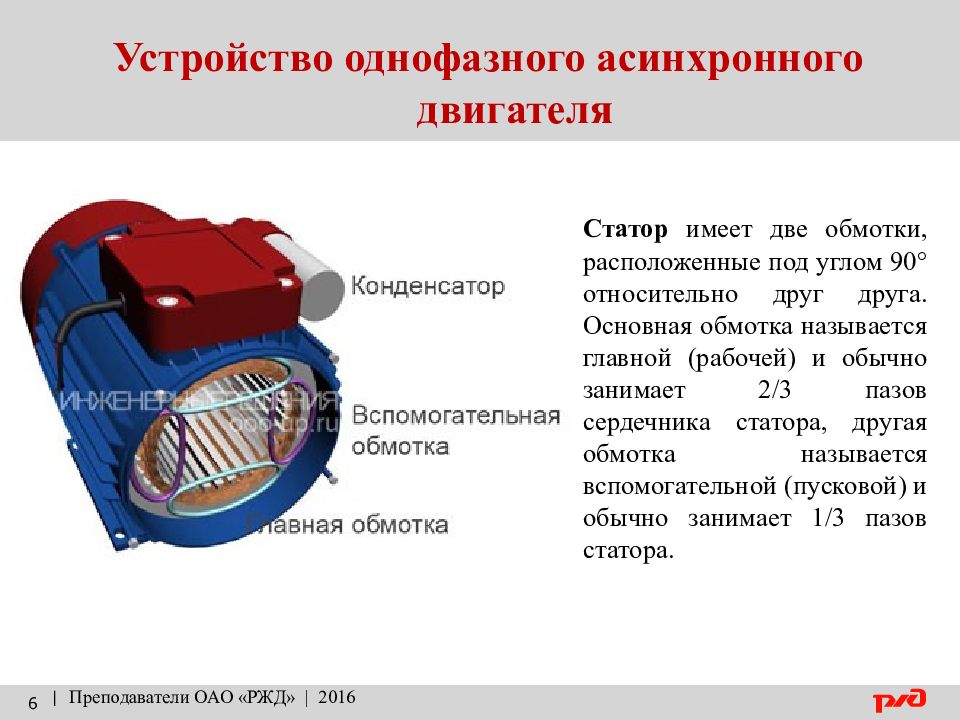
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Асинхронные электродвигатели: схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.
А если домножить это выражение на ток, то получим уравнение баланса мощностей.
Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
Электродвигатель — Energy Education
Рисунок 1. Электродвигатель от старого пылесоса. [1] Рисунок 2. Электрический ротор. [2]Электродвигатель — это устройство, используемое для преобразования электричества в механическую энергию, противоположное электрическому генератору. Они работают с использованием принципов электромагнетизма, которые показывают, что сила прилагается, когда электрический ток присутствует в магнитном поле. Эта сила создает крутящий момент на проволочной петле, присутствующей в магнитном поле, которая заставляет двигатель вращаться и выполнять полезную работу.Двигатели используются в широком спектре приложений, таких как вентиляторы, электроинструменты, бытовая техника, электромобили и гибридные автомобили.
Как они работают
У двигателейесть много разных рабочих частей, чтобы они постоянно вращались, обеспечивая необходимую мощность. Двигатели могут работать от постоянного (DC) или переменного (AC) тока, и оба имеют свои преимущества и недостатки. Для целей этой статьи будет проанализирован двигатель постоянного тока, чтобы прочитать о двигателях переменного тока, нажмите здесь.
Основные части двигателя постоянного тока включают: [3]
- Статор: Неподвижная часть двигателя, а именно магнит.Электромагниты часто используются для увеличения мощности.
- Ротор: Катушка, которая установлена на оси и вращается с высокой скоростью, обеспечивая систему механической энергией вращения.
- Коммутатор: Этот компонент является ключевым в двигателях постоянного тока, и его можно увидеть на рисунках 3 и 4. Без него ротор не мог бы вращаться непрерывно из-за противодействующих сил, создаваемых изменяющимся током. Коммутатор позволяет ротору вращаться, меняя направление тока каждый раз, когда катушка делает пол-оборота.
- Щетки: Они подключаются к клеммам источника питания, позволяя электроэнергии течь в коммутатор.
- Двигатель постоянного тока
-
Рисунок 3: Базовая установка двигателя постоянного тока. [3]
-
Рисунок 4: Анимация двигателя в действии. Коммутатор вращается, чтобы ротор вращался непрерывно. [3]
Список литературы
Электродвигатель — Энциклопедия Нового Мира
Вращающееся магнитное поле как сумма магнитных векторов трех фазных катушекЭлектродвигатель преобразует электрическую энергию в кинетическую энергию.Обратная задача — преобразование кинетической энергии в электрическую — выполняется генератором или динамо-машиной. Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а некоторые приложения используют одно устройство для выполнения обеих ролей. Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект.Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой токоведущий провод, находящийся внутри магнитного поля, действует механическая сила. Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю.
Большинство магнитных двигателей являются вращающимися, но существуют и линейные двигатели. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент.Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно. Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Двигатели постоянного тока
Электродвигатели различных размеров. Ротор от небольшого двигателя постоянного тока 3 В. Этот двигатель имеет 3 катушки, и коммутатор можно увидеть на ближнем конце.Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью. Постоянный магнит был помещен в середину ртутной ванны. Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода).Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу.
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания. Томас Давенпорт построил небольшой электродвигатель постоянного тока в 1834 году, используя его для управления игрушечным поездом по круговой дороге. Он получил патент на него в 1837 году.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, приведя его в действие как двигатель.Машина Грамма была первым промышленно полезным электродвигателем; более ранние изобретения использовались в качестве игрушек или лабораторных диковинок.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита. Поворотный переключатель, называемый коммутатором, меняет направление электрического тока дважды за цикл, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря.В этот момент переключения полярности импульс поддерживает классический двигатель в нужном направлении. (См. Схемы ниже.)
- Вращение двигателя постоянного тока
-
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отодвигается от левого магнита и тянется вправо, вызывая вращение.
-
Якорь продолжает вращаться.
-
Когда якорь становится выровненным по горизонтали, коммутатор меняет направление тока через катушку, меняя направление магнитного поля.Затем процесс повторяется.
Электродвигатель постоянного тока с возбужденным полем
Постоянные магниты на внешней стороне (статоре) электродвигателя постоянного тока можно заменить электромагнитами. Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательная обмотка) с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (параллельная обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом или имеют обмотку частично параллельно, а частично последовательно (составная обмотка) для баланса, обеспечивающего стабильную скорость в диапазоне нагрузок. Раздельное возбуждение также является обычным, с фиксированным напряжением поля, скорость регулируется изменением напряжения якоря. Дальнейшее уменьшение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Теория
Если вал двигателя постоянного тока вращается под действием внешней силы, двигатель будет действовать как генератор и производить электродвижущую силу (ЭДС). Это напряжение также генерируется при нормальной работе двигателя.Вращение двигателя создает напряжение, известное как противо-ЭДС (CEMF) или противо-ЭДС, поскольку оно противодействует приложенному напряжению на двигателе. Следовательно, падение напряжения на двигателе состоит из падения напряжения из-за этой CEMF и паразитного падения напряжения, возникающего из-за внутреннего сопротивления обмоток якоря.
Поскольку CEMF пропорциональна скорости двигателя, при первом запуске или полном останове электродвигателя CEMF отсутствует. Следовательно, ток через якорь намного выше.Этот высокий ток создаст сильное магнитное поле, которое запустит вращение двигателя. По мере вращения двигателя CEMF увеличивается до тех пор, пока не станет равным приложенному напряжению за вычетом паразитного падения напряжения. В этот момент через двигатель будет протекать меньший ток.
Управление скоростью
Обычно скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления.Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе. Обычно это делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или используя переключающее устройство с электронным управлением, состоящее из тиристоров, транзисторов или, ранее, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания.Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Процент времени включения, умноженный на напряжение питания, дает среднее напряжение, приложенное к двигателю.
Поскольку двигатель постоянного тока с последовательным возбуждением развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи. Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи).По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе), пока он не разрушит себя. Это также может быть проблемой для железнодорожных двигателей в случае потери сцепления, поскольку, если быстро не взять под контроль двигатели, они могут развивать скорость намного выше, чем при нормальных обстоятельствах. Это может вызвать проблемы не только для самих двигателей и шестерен, но и из-за разницы в скорости между рельсами и колесами, это также может вызвать серьезные повреждения рельсов и ступеней колес, поскольку они быстро нагреваются и охлаждаются.Ослабление поля используется в некоторых электронных элементах управления для увеличения максимальной скорости электромобиля. В простейшей форме используется контактор и резистор ослабления поля, электронное управление контролирует ток двигателя и подключает резистор ослабления поля в цепь, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель работает на полной расчетной скорости). Как только резистор включен в цепь, двигатель увеличит скорость выше своей нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, система управления отключает резистор и становится доступным крутящий момент на низкой скорости.
Одним из интересных методов управления скоростью двигателя постоянного тока является управление Уорда-Леонарда. Это метод управления двигателем постоянного тока (обычно с шунтирующей или составной обмоткой) и был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока (переменного тока), хотя он не лишен своих преимуществ в схемах постоянного тока. Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока из якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции).Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этим методом управления был метод de facto от его разработки до тех пор, пока он не был заменен твердотельными тиристорными системами. Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок большой шахты и даже промышленного технологического оборудования и электрических кранов.Его основным недостатком было то, что для реализации схемы требовалось три машины (пять в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка мотор-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости. Есть множество устаревших установок Ward-Leonard, которые все еще используются.
Универсальные двигатели
Вариант обмотки Двигатель постоянного тока — универсальный двигатель . Название происходит от того факта, что он может использовать переменный ток или постоянный ток, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении. . На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель DC .При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя. В этом приложении для поддержания высокого электрического КПД они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2 / 3 Гц. Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами. Непрерывное управление скоростью универсального двигателя, работающего на переменном токе, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может быть выполнено с использованием нескольких отводов на катушке возбуждения.Бытовые блендеры, рекламирующие множество скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с 0,707 среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превышать один оборот за цикл сетевого тока. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные измельчители часто превышают 30 000 об / мин.Теоретический универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению. В реальной жизни, однако, различное трение подшипников, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора — все это предотвращает превышение скорости.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, в которых раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных установок. На достаточно низких частотах характеристики двигателя примерно такие же, как если бы двигатель работал от постоянного тока.
Двигатели переменного тока (переменного тока)
В 1882 году Никола Тесла определил принцип вращающегося магнитного поля и впервые применил вращающееся силовое поле для работы машин.Он использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. В 1885 году Галилео Феррарис независимо исследовал эту концепцию. В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
Введение двигателя Теслы с 1888 г. и далее положило начало тому, что известно как Вторая промышленная революция, сделав возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретенной Тесла (1888 г.).До изобретения вращающегося магнитного поля двигатели работали, непрерывно пропуская проводник через постоянное магнитное поле (как в униполярных двигателях).
Тесла предположил, что коммутаторы из машины могут быть удалены, и устройство может работать во вращающемся силовом поле. Его учитель профессор Пошель заявил, что это было бы похоже на создание вечного двигателя. [1] Tesla позже получит патент США 0416194 (PDF), Electric Motor (декабрь 1889 г.), который напоминает двигатель, изображенный на многих фотографиях Теслы.Этим классическим электромагнитным двигателем переменного тока был асинхронный двигатель .
| Энергия статора | Энергия ротора | Общая потребляемая энергия | Развиваемая мощность |
|---|---|---|---|
| 10 | 90 | 100 | 900 |
| 50 100 |
В асинхронном двигателе , поле и якорь в идеале имели одинаковую напряженность поля, а сердечники поля и якоря были одинакового размера.Полная энергия, потребляемая для работы устройства, равнялась сумме энергии, затраченной на якорь и катушку возбуждения. [2] Мощность, развиваемая при работе устройства, равна произведению энергии, затрачиваемой в катушках якоря и возбуждения. [3]
Михаил Осипович Доливо-Добровольский позже изобрел трехфазный «клеть-ротор» в 1890 году. Успешная коммерческая многофазная система генерации и передачи на большие расстояния была спроектирована Алмерианом Декером в Mill Creek No.1 [4] в Редлендс, Калифорния. [5]
Компоненты и типы
Типичный двигатель переменного тока состоит из двух частей:
- Внешний стационарный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
В зависимости от типа используемого ротора существует два основных типа электродвигателей переменного тока:
- Синхронный электродвигатель, который вращается точно с частотой питания или долей частоты питания, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и головки считывающего устройства привода CD / DVDЕсли имеется многофазное электропитание, Обычно используется трехфазный (или многофазный) асинхронный двигатель переменного тока, особенно для двигателей большей мощности. Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Посредством электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля.Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигатели являются рабочими лошадками промышленности, и двигатели мощностью до 500 кВт (670 лошадиных сил) производятся в строго стандартизированных типоразмерах, что делает их почти полностью взаимозаменяемыми между производителями (хотя стандартные размеры в Европе и Северной Америке различаются). Очень большие синхронные двигатели могут иметь выходную мощность в десятки тысяч кВт для трубопроводных компрессоров, приводов в аэродинамической трубе и наземных преобразовательных систем.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Беличья клетка получила свое название от своей формы — кольца на обоих концах ротора, с перемычками, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитые между железными пластинами ротора, и обычно видны только концевые кольца.Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и концевых колец; В двигателях с высоким КПД часто используется литая медь для уменьшения сопротивления ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора.Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой. Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, двигатель вентилятора с короткозамкнутым ротором может приглушать свет в доме при запуске, но не затемняет свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается.Кроме того, остановившийся двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничивает ток (или не отключает его полностью), вероятным результатом является перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости.В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств.Транзисторные инверторы с частотно-регулируемым приводом теперь можно использовать для управления скоростью, а двигатели с фазным ротором становятся все реже. (Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток, но это никогда не используется в бытовых приборах, потому что это может вызвать электрические помехи и из-за высоких требований к мощности.)
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы (Direct-on-line, DOL).Если необходимо ограничить пусковой пусковой ток (если мощность двигателя больше, чем у источника питания при коротком замыкании), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости. Этот метод более распространен в Европе, чем в Северной Америке.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока
Если соединения с обмотками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнит), результат называется синхронным двигателем, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться как генератор переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами.Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, ток в обмотке с короткозамкнутым ротором не индуцируется, поэтому он мало влияет на синхронную работу двигателя. , помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей.
Двухфазные серводвигатели переменного тока
Типичный двухфазный серводвигатель переменного тока имеет короткозамкнутый ротор и поле, состоящее из двух обмоток: 1) главной обмотки постоянного напряжения (переменного тока) и 2) управляющей обмотка напряжения (переменного тока) находится в квадратуре с основной обмоткой, чтобы создать вращающееся магнитное поле.Электрическое сопротивление ротора намеренно повышено, чтобы кривая скорость-крутящий момент была достаточно линейной. Двухфазные серводвигатели по своей сути являются высокоскоростными устройствами с низким крутящим моментом, которые в значительной степени приспособлены для управления нагрузкой.
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле должно создаваться другими способами. Обычно используются несколько методов.
Обычным однофазным двигателем является двигатель с экранированными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы.В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле, создавая необходимое вращающееся магнитное поле.
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой , обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды.По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В электродвигателях с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель.
Фаза магнитного поля в этой пусковой обмотке смещена по сравнению с фазой сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель. Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. Тогда двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В пусковом двигателе с конденсатором , пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, которая способна к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту). Конденсатор, естественно, увеличивает стоимость таких двигателей.
Еще одна разновидность — двигатель с постоянным разделенным конденсатором (PSC) (также известный как конденсаторный двигатель запуска и запуска). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания.Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость.
Отталкивающие двигатели — это однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В отталкивающем двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было изготовлено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском (RS-IR).Двигатель RS-IR имеет центробежный переключатель, который закорачивает все сегменты коммутатора, так что двигатель работает как асинхронный двигатель после разгона до полной скорости. Двигатели RS-IR используются для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 год было продано немного отталкивающих двигателей любого типа.
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи).Роторы в этих двигателях не требуют индуцированного тока, поэтому они не скользят назад против частоты сети. Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых дисков и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопов. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Моментные двигатели
Моментные двигатели — это особая разновидность асинхронных двигателей, которые могут работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений.В этом режиме двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название). Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимые в действие низким напряжением, характеристики этих двигателей позволяют приложить к ленте относительно постоянное легкое натяжение независимо от того, протягивает ли ведущую ленту мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.В компьютерном мире моментные двигатели используются с рулевыми колесами с обратной связью по усилию.
Шаговые двигатели
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Двигатель с постоянными магнитами
Двигатель с постоянными магнитами аналогичен обычному двигателю постоянного тока, за исключением того факта, что обмотка возбуждения заменена постоянными магнитами. Таким образом, двигатель будет действовать как двигатель постоянного тока с постоянным возбуждением (двигатель постоянного тока с независимым возбуждением).
Эти двигатели обычно имеют небольшую мощность, до нескольких лошадиных сил. Они используются в небольших приборах, транспортных средствах с батарейным питанием, в медицинских целях, в другом медицинском оборудовании, таком как рентгеновские аппараты. Эти двигатели также используются в игрушках и в автомобилях в качестве вспомогательных двигателей для регулировки сиденья, электрических стеклоподъемников, люка в крыше, регулировки зеркал, электродвигателей вентилятора, вентиляторов охлаждения двигателя и т.п.
Последние разработки — двигатели ПСМ для электромобилей.- Высокая эффективность — Минимальный фиксирующий момент и крутящий момент неровности поверхности — Небольшая занимаемая площадь, компактные размеры — Малый вес источник [3]
Бесщеточные двигатели постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины.Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора.Бесщеточные двигатели обычно имеют КПД 85-90 процентов, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80 процентов.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные аналогично шаговым двигателям, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через основные фазовые соединения вместо датчиков Холла.Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах и обозначаются моделистами как двигатели outrunner (поскольку магниты находятся снаружи).
Бесщеточные двигатели постоянного тока обычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных изделий, таких как вентиляторы, лазерные принтеры и копировальные аппараты. . У них есть несколько преимуществ перед обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока.Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока с использованием щеток и коммутатора. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без переключателя или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением).В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Бесщеточные двигатели не имеют шансов на искрение, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт.Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов. Этим фактом пользуется бесщеточный электродвигатель постоянного тока , специализированная форма щеточного электродвигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника.Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блинчика (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лент и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Линейные двигатели
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
Электродвигатель с двойным питанием
Электродвигатели с двойным питанием или Электромашины с двойным питанием включают в себя два набора многофазных обмоток с независимым питанием, которые активно участвуют в процессе преобразования энергии (т. Е. С двойным питанием), по крайней мере, с одним из комплекты обмоток с электронным управлением для синхронной работы от субсинхронных до сверхсинхронных скоростей.В результате электродвигатели с двойным питанием представляют собой синхронные машины с эффективным диапазоном скоростей с постоянным крутящим моментом, который в два раза превышает синхронную скорость для данной частоты возбуждения. Это вдвое больше диапазона скоростей с постоянным крутящим моментом, чем у электрических машин с одиночным питанием, в которых используется одна активная обмотка. Теоретически этот атрибут имеет привлекательные разветвления по стоимости, размеру и эффективности по сравнению с электрическими машинами с одинарным питанием, но двигатели с двойным питанием трудно реализовать на практике.
Электромашины с двойным питанием и бесщеточным ротором с двойным питанием и так называемые бесщеточные электрические машины с двойным питанием — единственные примеры синхронных электрических машин с двойным питанием.
Электродвигатель с одинарным питанием
Электродвигатели с одиночным питанием или Электромашины с одиночным питанием включают одну многофазную обмотку, которая активно участвует в процессе преобразования энергии (т. Е. С одинарным питанием). Электромашины с однополярным питанием работают либо по индукционным (т.е. асинхронным), либо по синхронным принципам. Комплект активной обмотки может управляться электроникой для оптимальной производительности. Индукционные машины демонстрируют пусковой момент и могут работать как автономные машины, но синхронные машины должны иметь вспомогательные средства для запуска и практической работы, такие как электронный контроллер.
Асинхронные двигатели (т. Е. С короткозамкнутым ротором или ротор с обмоткой), синхронные двигатели (т. Е. С возбуждением от поля, двигатели с постоянными магнитами или бесщеточные двигатели постоянного тока, реактивные двигатели и т. Д.), Которые обсуждаются на этой странице, являются примеры двигателей с однополярным питанием. Безусловно, двигатели с однополярным питанием — это преимущественно устанавливаемые двигатели.
Двигатель с двумя механическими портами
Электродвигатели с двумя механическими портами (или электродвигатель DMP) считается новой концепцией электродвигателей.Точнее, электродвигатели DMP — это на самом деле два электродвигателя (или генератора), занимающие один и тот же корпус. Каждый двигатель работает по традиционным принципам электродвигателя. Электрические порты, которые могут включать в себя электронную опору электродвигателей, связаны с одним электрическим портом, в то время как два механических порта (вала) доступны снаружи. Теоретически ожидается, что физическая интеграция двух двигателей в один увеличит удельную мощность за счет эффективного использования в противном случае ненужной площади магнитного сердечника.Механика интеграции, например, для двух механических валов, может быть довольно экзотической.
Наномотор с нанотрубками
Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многослойных углеродных нанотрубок. Прикрепив золотую пластину (размером порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (например, вложенных углеродных цилиндров), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра.Эти подшипники очень прочные; Устройства колебались тысячи раз без признаков износа. Работа была сделана на месте в SEM. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации, которая в будущем может найти свое применение в коммерческих целях.
На этом рендере можно увидеть процесс и технологию.
Пускатели двигателей
Противо-ЭДС помогает сопротивлению якоря ограничивать ток через якорь. При первом подаче питания на двигатель якорь не вращается.В этот момент противоэдс равна нулю, и единственным фактором, ограничивающим ток якоря, является сопротивление якоря. Обычно сопротивление якоря двигателя меньше одного Ом; поэтому ток через якорь при подаче питания будет очень большим. Этот ток может вызвать чрезмерное падение напряжения, что повлияет на другое оборудование в цепи. Или просто отключите устройства защиты от перегрузки.
- Следовательно, возникает необходимость в дополнительном сопротивлении, включенном последовательно с якорем, для ограничения тока до тех пор, пока вращение двигателя не создаст противоэдс.По мере увеличения скорости вращения двигателя сопротивление постепенно снижается.
Трехточечный пускатель
Входящая мощность обозначается как L1 и L2. Компоненты, обозначенные пунктирными линиями, образуют трехточечный стартер. Как следует из названия, есть только три соединения с пускателем. Подключения к якорю обозначены как A1 и A2. Концы катушки возбуждения (возбуждения) обозначены как F1. и F2. Для управления скоростью полевой реостат соединен последовательно с шунтирующим полем.Одна сторона линии соединена с рычагом стартера (на схеме обозначена стрелкой). Рычаг подпружинен, поэтому он вернется в положение «Выкл.», Которое не удерживается ни в каком другом положении.
- На первом этапе плеча полное линейное напряжение прикладывается к полю шунта. Поскольку полевой реостат обычно устанавливается на минимальное сопротивление, скорость двигателя не будет чрезмерной; кроме того, двигатель будет развивать большой пусковой крутящий момент.
- Пускатель также соединяет электромагнит последовательно с шунтирующим полем.Он будет удерживать рычаг в положении, когда рычаг соприкасается с магнитом.
- Между тем это напряжение подается на шунтирующее поле, а пусковое сопротивление ограничивает прохождение тока к якорю.
- По мере того, как двигатель набирает скорость, нарастает противоэдс, рычаг медленно перемещается в положение короткого замыкания.
Четырехточечный стартер
Четырехточечный стартер устраняет недостаток трехточечного стартера. В дополнение к тем же трем точкам, которые использовались с трехточечным стартером, другая сторона линии, L1, является четвертой точкой, подведенной к стартеру.Когда рычаг перемещается из положения «Выкл.», Катушка удерживающего магнита подключается к линии. Удерживающий магнит и пусковые резисторы работают так же, как и в трехпозиционном пускателе.
- Возможность случайного размыкания цепи возбуждения весьма мала. Четырехточечный пускатель обеспечивает защиту двигателя от обесточивания. В случае сбоя питания двигатель отключается от сети.
См. Также
Компоненты:
- Центробежный переключатель
- Коммутатор (электрический)
- Контактное кольцо
Ученые и инженеры:
Применения:
- Настольная пила
- Электромобиль
- Коррекция коэффициента мощности
Прочее:
- Электротехника
- Электрический элемент
- Электрогенератор
- Список тем по электронике
- Список технологий
- Теорема максимальной мощности
- Мотор-генератор
- Контроллер двигателя
- Метод движения
- Однофазный электроэнергия
- Хронология развития двигателей и двигателестроения
Примечания
Ссылки
- Бедфорд, Б.Д., Р. Г. Хофт и др. 1964. Принципы инверторных цепей. Нью-Йорк: John Wiley & Sons, Inc. ISBN 0471061344. (Для управления скоростью двигателя с переменной частотой используются схемы инвертора)
- Чиассон, Джон Н. 2005. Моделирование и высокопроизводительное управление электрическими машинами , Нью-Йорк, Нью-Йорк: Wiley-IEEE Press. ISBN 047168449X.
- Fink, Donald G .; Бити, Х. Уэйн (1978). Стандартное руководство для инженеров-электриков, одиннадцатое издание. Нью-Йорк, Нью-Йорк: Макгроу-Хилл.ISBN 007020974X.
- Фицджеральд, А. Э., Чарльз Кингсли младший, Стивен Д. Уманс. 2002. Электрические машины. Колумбус, Огайо: McGraw-Hill Science / Engineering / Math. ISBN 0073660094.
- Houston, Edwin J .; Артур Кеннелли, (1902) Последние типы динамо-электрических машин. , авторское право American Technical Book Company 1897, Нью-Йорк, Нью-Йорк: P.F. Кольер и сыновья. ASIN: B000874XH6
- Купхальдт, Тони Р. Уроки электрических цепей — Том II. 2000-2006.Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА. дата обращения 11 апреля 2006 г.
- Пелли Б. Р. (1971). Тиристорные преобразователи с фазовым управлением и циклоконвертеры. Хобокен, Нью-Джерси: John Wiley & Sons. ISBN 0471677906
- Шейнфилд Д. Дж. (2001). Промышленная электроника для инженеров, химиков и техников. Норвич, Нью-Йорк: Издательство Уильяма Эндрю. ISBN 0815514670.
- Smith, A.O. Электродвигатели переменного и постоянного тока. [4]. accessdate 11 апреля 2006 г.
Внешние ссылки
Все ссылки получены 18 сентября 2017 г.
Кредиты
Энциклопедия Нового Света Писатели и редакторы переписали и завершили статью Википедия в соответствии со стандартами New World Encyclopedia . Эта статья соответствует условиям лицензии Creative Commons CC-by-sa 3.0 (CC-by-sa), которая может использоваться и распространяться с указанием авторства. Кредит предоставляется в соответствии с условиями этой лицензии, которая может ссылаться как на участников New World Encyclopedia , так и на самоотверженных добровольцев Фонда Викимедиа.Чтобы процитировать эту статью, щелкните здесь, чтобы просмотреть список допустимых форматов цитирования. История более ранних вкладов википедистов доступна исследователям здесь:
История этой статьи с момента ее импорта в Энциклопедия Нового Света :
Примечание. могут применяться ограничения на использование отдельных изображений, на которые распространяется отдельная лицензия.
Строительство, работа, типы и применение
Преобразование энергии из электрической в механическую было объяснено Майклом Фарадеем, британским ученым в 1821 году.Преобразование энергии может быть выполнено путем размещения проводника с током внутри магнитного поля. Таким образом, проводник начинает вращаться из-за крутящего момента, создаваемого магнитным полем и электрическим током. Британский ученый Уильям Стерджен сконструировал машину постоянного тока в 1832 году на основе своего закона. Однако это было дорого и не подходило ни для каких приложений. Итак, наконец, первый электродвигатель был изобретен в 1886 году Фрэнком Джулианом Спрагом.
Что такое электродвигатель?
Электродвигатель можно определить как; это один из видов машин, используемых для преобразования энергии из электрической в механическую.Большинство двигателей работают за счет связи между электрическим током и магнитным полем обмотки двигателя для создания силы в форме вращения вала. Эти двигатели могут запускаться от источника постоянного или переменного тока. Генератор механически аналогичен электродвигателю, однако работает в противоположном направлении, преобразуя механическую энергию в электрическую. Схема электродвигателя представлена ниже.
Классификация электродвигателей может быть сделана на основе таких соображений, как тип источника питания, конструкция, тип выходного сигнала движения и применение.Они бывают переменного тока, постоянного тока, бесщеточные, щеточные, фазного типа, например, однофазные, двух- или трехфазные и т. Д. Двигатели с типичными характеристиками и размерами могут обеспечивать подходящую механическую мощность для использования в промышленности. Эти двигатели применимы в насосах, промышленных вентиляторах, станках, воздуходувках, электроинструментах, дисковых накопителях.
электродвигательКонструкция электродвигателя
Конструкция электродвигателя может быть выполнена с использованием ротора, подшипников, статора, воздушного зазора, обмоток, коммутатора и т. Д.
конструкция электродвигателяРотор
Ротор в электродвигателе является подвижной частью, и его основная функция заключается во вращении вала для выработки механической энергии. Как правило, ротор включает в себя проводники, которые проложены для проведения токов и сообщаются с магнитным полем в статоре.
Подшипники
Подшипники в двигателе в основном служат опорой для ротора для активации его оси. Вал двигателя расширяется с помощью подшипников под нагрузку двигателя.Поскольку силы нагрузки используются за пределами подшипника, эта нагрузка называется консольной.
Статор
Статор в двигателе является неактивной частью электромагнитной цепи. Он включает в себя постоянные магниты или обмотки. Статор может быть изготовлен из различных тонких металлических листов, которые известны как ламинаты. В основном они используются для снижения потерь энергии.
Воздушный зазор
Воздушный зазор — это пространство между статором и ротором. Эффект воздушного зазора в основном зависит от зазора.Это основной источник низкого коэффициента мощности двигателя. Когда воздушный зазор между статором и ротором увеличивается, ток намагничивания также увеличивается. По этой причине воздушный зазор должен быть меньше.
Обмотки
Обмотки в двигателях — это провода, проложенные внутри катушек, обычно покрытые вокруг гибкого железного магнитного сердечника, чтобы образовывать магнитные полюса при подаче тока. Для обмоток двигателя медь является наиболее часто используемым материалом.Медь является наиболее распространенным материалом для обмоток, также используется алюминий, хотя он должен быть твердым, чтобы надежно выдерживать аналогичную электрическую нагрузку.
Коммутатор
Коммутатор представляет собой полукольцо в двигателе, которое изготовлено из меди. Основная функция этого — связать щетки с катушкой. Кольца коммутатора используются для обеспечения того, чтобы направление тока внутри катушки менялось на противоположное каждый полупериод, поэтому одна поверхность катушки часто толкается вверх, а другая поверхность катушки толкается вниз.
Работа электродвигателя
В основном, большинство электродвигателей работают по принципу электромагнитной индукции, однако существуют различные типы двигателей, в которых используются другие электромеханические методы, а именно пьезоэлектрический эффект и электростатическая сила.
Основной принцип работы электромагнитных двигателей может зависеть от механической энергии, которая воздействует на проводник, используя поток электрического тока, и он помещается в магнитное поле. Направление механической силы перпендикулярно магнитному полю, проводнику и магнитному полю.
Типы электродвигателей
В настоящее время наиболее часто используемые электродвигатели включают электродвигатели переменного тока и электродвигатели постоянного тока
Электродвигатели переменного тока
Двигатели переменного тока подразделяются на три типа, а именно: асинхронные, синхронные и линейные двигатели
- Асинхронные двигатели подразделяются на два типа, а именно однофазные и трехфазные двигатели
- Синхронные двигатели подразделяются на два типа, а именно гистерезисные и реактивные двигатели
Двигатель постоянного тока
Двигатели постоянного тока подразделяются на два типа: двигатели с самовозбуждением и двигатели с независимым возбуждением.
- Самовозбуждающиеся двигатели подразделяются на три типа, а именно: серийные, составные и параллельные двигатели.
- Составные двигатели подразделяются на два типа, а именно: короткие и длинные параллельные двигатели.
Применение электродвигателя
Применение электродвигателя включает следующие.
- Применения электродвигателей в основном включают нагнетатели, вентиляторы, станки, насосы, турбины, электроинструменты, генераторы переменного тока, компрессоры, прокатные станы, корабли, грузчики, бумажные фабрики.
- Электродвигатель является важным устройством в различных приложениях, таких как HVAC- отопление, вентиляционное и охлаждающее оборудование, бытовая техника и автомобили.
Преимущества электродвигателя
Электродвигатели имеют несколько преимуществ по сравнению с обычными двигателями, которые включают следующее.
- Первичная стоимость этих двигателей невысока по сравнению с двигателями, работающими на ископаемом топливе, но их номинальная мощность в лошадиных силах одинакова.
- Эти двигатели содержат движущиеся части, поэтому срок службы этих двигателей больше.
- При надлежащем обслуживании мощность этих двигателей составляет до 30 000 часов. Таким образом, каждый двигатель не требует особого обслуживания.
- Эти двигатели чрезвычайно эффективны и обеспечивают автоматическое управление функциями автоматического пуска и останова.
- Эти двигатели не используют топливо, потому что не требуют обслуживания моторным маслом или аккумулятором.
Недостатки электродвигателя
К недостаткам этих электродвигателей можно отнести следующее.
- Большие электродвигатели нелегко перемещать, и следует учитывать точное напряжение и ток питания.
- В некоторых ситуациях дорогостоящее расширение линии является обязательным для изолированных областей, где электрическая энергия недоступна.
- Обычно эти двигатели работают более эффективно.
Таким образом, все дело в электродвигателе, и его основная функция — преобразование энергии из электрической в механическую.Эти двигатели очень тихие и удобные, в них используется переменный ток или постоянный ток. Эти двигатели доступны везде, где механическое движение может происходить с использованием переменного или постоянного тока. Вот вам вопрос, как сделать электродвигатель?
Как работает мотор электромобиля
Типы электродвигателей
В автомобильной промышленности существуют два типа двигателей переменного тока: синхронные и асинхронные.Когда дело доходит до электромобиля, у синхронных и асинхронных двигателей есть свои сильные стороны — один не обязательно «лучше» другого.
Двигатели синхронные и асинхронные
Асинхронный двигатель, также называемый асинхронным двигателем, основан на статоре с электрическим приводом для создания вращающегося магнитного поля. Это влечет ротор в бесконечную погоню, как если бы он безуспешно пытался догнать магнитное поле. Асинхронный двигатель часто используется в электромобилях, которые в основном используются для движения на повышенных скоростях в течение длительных периодов времени.
В синхронном двигателе ротор сам действует как электромагнит, активно участвуя в создании магнитного поля. Таким образом, его скорость вращения прямо пропорциональна частоте тока, который питает двигатель. Это делает синхронный двигатель идеальным для городского движения, которое обычно требует регулярной остановки и запуска на низких скоростях.
И синхронные, и асинхронные двигатели работают в обратном порядке, что означает, что они могут преобразовывать механическую энергию в электричество во время замедления.Это принцип рекуперативного торможения, который исходит от генератора.
Детали электродвигателей
Давайте теперь подробнее рассмотрим некоторые из различных частей двигателя электромобиля: от магнитов электродвигателей или синхронных двигателей с внешним возбуждением (EESM) до силового агрегата в целом.
Постоянные магниты
В некоторых синхронных двигателях в качестве ротора используется двигатель с постоянными магнитами.Эти постоянные магниты встроены в стальной ротор, создавая постоянное магнитное поле. Преимущество постоянного электромотора в том, что он работает без источника питания, но требует использования металлов или сплавов, таких как неодим или диспрозий. Эти «редкоземельные элементы» являются ферромагнитными, что означает, что они могут быть намагничены, чтобы стать постоянными магнитами. Они используются в различных промышленных целях: от ветряных генераторов, аккумуляторных инструментов и наушников до велосипедных динамо-машин и… тяговых двигателей для некоторых электромобилей!
Проблема в том, что цены на эти «редкие земли» очень волатильны.Несмотря на свое название, на самом деле они не обязательно такие редкие, но встречаются почти исключительно в Китае, который, следовательно, имеет квазимонополию на их производство, продажу и распространение. Это объясняет, почему производители упорно работали, чтобы найти альтернативные решения для электродвигателей транспортных средств.
Синхронные двигатели с внешним возбуждением
Одно из этих решений, которое Renault использовало для New ZOE, включает сборку магнита электродвигателя из медной катушки. Это требует более сложного производственного процесса, но позволяет избежать проблем с питанием при сохранении отличного соотношения между массой двигателя и передаваемым крутящим моментом.
Гийом Фори, руководитель отдела проектирования завода Renault Cléon во Франции, дает представление о сложности и изобретательности двигателя New ZOE: «Производство EESM требует специальных процессов намотки катушек и пропитки. Ограничения ожидаемых характеристик продукта, цель снижения отношения веса к мощности и высокая скорость производства требуют от нас эффективного использования самых современных технологий для выполнения этих процессов ».
Электротрансмиссия
В электрическом транспортном средстве двигатель, состоящий из ротора и статора, является частью более крупного блока, электрической трансмиссии, ансамбля, который заставляет электродвигатель работать.
Также в этом устройстве силовой электронный контроллер (PEC) объединяет всю силовую электронику, отвечающую за управление питанием двигателя и зарядку аккумулятора. Наконец, он включает в себя редукторный двигатель, часть, отвечающую за регулировку крутящего момента и скорости вращения, передаваемых двигателем на колеса.
Вместе эти элементы обеспечивают плавную и эффективную работу электродвигателя. И результат? Ваш электромобиль бесшумный, надежный, менее дорогой и приятный в управлении!
Авторские права: Pagecran
Как работают электродвигатели и генераторы
Электромобили используют исключительно электродвигатели для движения, а гибриды используют электродвигатели, чтобы помочь своим двигателям внутреннего сгорания при передвижении.Но это не все. Эти самые двигатели могут использоваться и используются для выработки электроэнергии (в процессе рекуперативного торможения) для зарядки бортовых аккумуляторов этих транспортных средств.
Самый частый вопрос: «Как это может быть … как это работает?» Большинство людей понимают, что для работы двигатель работает от электричества — они каждый день видят это в своей бытовой технике (стиральных машинах, пылесосах, кухонных комбайнах).
Но идея о том, что двигатель может «вращаться в обратном направлении», фактически вырабатывая электричество, а не потребляя его, кажется почти магией.Но как только связь между магнитами и электричеством (электромагнетизм) и концепция сохранения энергии становится понятной, загадка исчезает.
Электромагнетизм
Электроэнергия и выработка электроэнергии начинаются со свойства электромагнетизма — физических отношений между магнитом и электричеством. Электромагнит — это устройство, которое действует как магнит, но его магнитная сила проявляется и контролируется электричеством.
Когда провод, сделанный из проводящего материала (например, меди), движется через магнитное поле, в проводе создается ток (элементарный генератор).И наоборот, когда электричество проходит через провод, намотанный вокруг железного сердечника, и этот сердечник находится в присутствии магнитного поля, он будет двигаться и скручиваться (очень простой двигатель).
Моторы / генераторы
Мотор / генераторы — это действительно одно устройство, которое может работать в двух противоположных режимах. Вопреки тому, что иногда думают люди, это не означает, что два режима двигателя / генератора работают в обратном направлении друг от друга (что в качестве двигателя устройство вращается в одном направлении, а в качестве генератора оно вращается в противоположном направлении).
Вал всегда вращается одинаково. «Смена направления» заключается в потоке электричества. В качестве двигателя он потребляет электричество (поступает) для производства механической энергии, а в качестве генератора он потребляет механическую энергию для производства электроэнергии (вытекает).
Электромеханическое вращение
Электродвигатели / генераторы обычно бывают двух типов: переменного (переменного тока) или постоянного (постоянного тока), и эти обозначения указывают на тип электроэнергии, которую они потребляют и генерируют.
Если не вдаваться в подробности и не затушевывать проблему, то вот разница: переменный ток меняет направление (чередуется) по мере прохождения через цепь. Постоянный ток течет в одном направлении (остается неизменным) при прохождении через цепь.
Тип используемого тока в основном зависит от стоимости устройства и его эффективности (двигатель / генератор переменного тока, как правило, дороже, но также намного эффективнее). Достаточно сказать, что в большинстве гибридов и во многих более крупных полностью электрических транспортных средствах используются двигатели / генераторы переменного тока — так что это тип, на котором мы сосредоточимся в этом объяснении.
Электродвигатель / генератор переменного тока состоит из 4 основных частей:
- Якорь с проволочной обмоткой (ротор) на валу
- Поле магнитов, которые индуцируют электрическую энергию, уложенную бок о бок в корпусе (статоре)
- Контактные кольца, пропускающие переменный ток к / от якоря
- Щетки, которые контактируют с контактными кольцами и передают ток в / от электрической цепи
Генератор переменного тока в действии
Якорь приводится в движение механическим источником энергии (например, при промышленном производстве электроэнергии это будет паровая турбина).Когда этот намотанный ротор вращается, его проволочная катушка проходит над постоянными магнитами в статоре, и в проводах якоря создается электрический ток.
Но поскольку каждая отдельная петля в катушке сначала проходит через северный полюс, а затем через южный полюс каждого магнита по мере его вращения вокруг своей оси, индуцированный ток постоянно и быстро меняет направление. Каждое изменение направления называется циклом и измеряется в циклах в секунду или герцах (Гц).
В Соединенных Штатах частота цикла составляет 60 Гц (60 раз в секунду), тогда как в большинстве других развитых стран мира она составляет 50 Гц.Отдельные контактные кольца установлены на каждом из двух концов проволочной петли ротора, чтобы обеспечить путь для выхода тока из якоря. Щетки (которые на самом деле являются угольными контактами) скользят по контактным кольцам и завершают путь для тока в цепь, к которой подключен генератор.
Двигатель переменного тока в действии
Действие двигателя (подача механической энергии), по сути, противоположно действию генератора. Вместо того, чтобы вращать якорь для выработки электричества, ток подается по цепи через щетки и контактные кольца в якорь.Этот ток, протекающий через ротор (якорь) с обмоткой, превращает его в электромагнит. Постоянные магниты в статоре отражают эту электромагнитную силу, заставляя якорь вращаться. Пока через цепь течет электричество, двигатель будет работать.
Электродвигатель вилочного погрузчика: краткое, но полезное руководство
Основной принцип работы электродвигателя — это правило магнетизма. Противоположные полюса притягиваются, а подобные полюса отталкиваются.
Что такое электродвигатель вилочного погрузчика?
Электродвигатель вилочного погрузчика — это устройство, которое преобразует электрохимическую энергию, вырабатываемую промышленным аккумулятором, в механическую энергию.Электродвигатель вилочного погрузчика должен обеспечивать движение агрегата — вперед, назад, вверх и вниз — а также приводить в действие другие элементы, такие как гидравлические насосы и электрические компоненты.
Понимание деталей электродвигателя: правило магнетизма
Основным принципом работы двигателя электрического погрузчика является правило магнетизма. Противоположные полюса притягиваются, а подобные полюса отталкиваются.
Вообразите стержневой магнит, установленный на валу так, чтобы он мог вращать его северный и южный полюса. Если вы направите другой магнит с такими же полюсами на установленный на валу магнит, он отодвинется, а противоположный полюс переместится в сторону указывающего магнита.
Если перевернуть магнит на валу, он снова отгонится. Это метод электродвигателя вилочного электрического погрузчика; однако электродвигатель вилочного электрического погрузчика использует магнитное поле, создаваемое электрическим током, присутствующим в промышленной батарее. Когда проволока наматывается на железный сердечник, она создает магнитное поле и ведет себя так же, как обычный магнит. Это принцип конструкции электродвигателя вилочного погрузчика.
Механизм вилочного погрузчика и работа электродвигателя
- Катушка возбуждения / статор действует как магнит в вашей руке.Ток проходит в провод в одном направлении, что определяет, что эта часть имеет фиксированные северный и южный полюса, способные отражать противоположные полюса.
- Коммутатор / якорь представляет собой установленный на валу магнит. Как и статор, он имеет магнитное поле, которое создается при подаче тока на проволочную обмотку. Поскольку он может вращаться, он будет двигаться, пытаясь сопоставить разные полюса с полюсами статора.
- Щетки обеспечивают реверсивное действие, подобное действию вращения магнита на валу.Действие этого поворота заставило вращающийся магнит снова уйти, когда он попытался перестроить полюса, отличные от полюсов статора. Коммутатор постоянно меняет полярность ротора, так что он всегда будет действовать как полюс, противоположный фиксированным полюсам статора.
Эти действия производят плавную, но мощную и эффективную механическую энергию или число оборотов в минуту (об / мин). В погрузчике мотор подключен непосредственно к ведущему мосту — трансмиссии или приводного вала нет.Таким образом, шлицевой или рифленый конец якоря приводит в движение шестерню оси, регулируя скорость и мощность в соответствии с током, подаваемым из цепи ускорителя электрической системы.
Некоторые электродвигатели вилочных электропогрузчиков могут работать от аккумуляторов на 36 или 48 В. Аккумулятор на 36 В подходит для большинства работ; однако, когда необходимы более высокие скорости движения и подъема, или когда вилочный погрузчик должен выдерживать более длительные рабочие смены, к тому же двигателю можно подключить 48-вольтовую батарею.
Твердотельные органы управления для работы моторизованного вилочного погрузчика
Двигатель электрического вилочного погрузчика является частью электрической системы, которая управляется кремниевым выпрямителем (управление тиристором) или транзисторным управлением. Система управления является «мозгом» вилочного электропогрузчика и выполняет несколько функций:
- Управляет величиной тока, подаваемого от аккумулятора к приводным двигателям через цепи ускорителя.
- Дополнительные полупроводниковые элементы управления доступны для управления током в цепях гидравлического насоса для рулевого управления с усилителем и / или подъема, наклона и вспомогательных операций.
Большинство современных полупроводниковых элементов управления имеют диагностические возможности, которые позволяют отображать код неисправности в случае возникновения проблемы. Кроме того, они могут быть запрограммированы специалистами по индивидуальному заказу, чтобы разрешить изменение производительности погрузчика для удобства оператора.
Есть вопросы по двигателю электрического погрузчика? Свяжитесь с ProLift для обслуживания и поддержки запасных частей!
Связаться с ProLiftИзмерение и анализ мощности электродвигателя
Билл Гэтеридж, менеджер по продукции, Power Measuring Instruments, Yokogawa Corporation of America
Часть 1: Основные измерения электрической мощности
Электродвигатели — это электромеханические машины, преобразующие электрическую энергию в механическую.Несмотря на различия в размере и типе, все электродвигатели работают примерно одинаково: электрический ток, протекающий через катушку с проволокой в магнитном поле, создает силу, которая вращает катушку, создавая крутящий момент.
Понимание выработки электроэнергии, потерь мощности и различных типов измеряемой мощности может быть пугающим, поэтому давайте начнем с обзора основных измерений электрической и механической мощности.
Что такое мощность? В самом простом виде мощность — это работа, выполняемая в течение определенного периода времени.В двигателе мощность передается на нагрузку путем преобразования электрической энергии в соответствии со следующими законами науки.
В электрических системах напряжение — это сила, необходимая для перемещения электронов. Ток — это скорость потока заряда в секунду через материал, к которому приложено определенное напряжение. Умножив напряжение на соответствующий ток, можно определить мощность.
P = V * I, где мощность (P) в ваттах, напряжение (V) в вольтах, а ток (I) в амперах
Ватт (Вт) — единица мощности, определяемая как один джоуль в секунду.Для источника постоянного тока расчет — это просто напряжение, умноженное на ток: W = V x A. Однако определение мощности в ваттах для источника переменного тока должно включать коэффициент мощности (PF), поэтому W = V x A x PF для переменного тока. системы.
Коэффициент мощности представляет собой безразмерное отношение в диапазоне от -1 до 1 и представляет собой количество реальной мощности, выполняемой при работе с нагрузкой. При коэффициенте мощности меньше единицы, что почти всегда имеет место, будут потери в реальной мощности. Это связано с тем, что напряжение и ток цепи переменного тока имеют синусоидальную природу, а амплитуда тока и напряжения цепи переменного тока постоянно смещается и обычно не идеально совмещена.
Поскольку мощность равна напряжению, умноженному на ток (P = V * I), мощность является максимальной, когда напряжение и ток выстраиваются вместе, так что пики и нулевые точки на сигналах напряжения и тока возникают одновременно. Это типично для простой резистивной нагрузки. В этой ситуации две формы сигнала находятся «в фазе» друг с другом, а коэффициент мощности будет равен 1. Это редкий случай, поскольку почти все нагрузки не просто обладают идеальным сопротивлением.
Говорят, что два сигнала «не в фазе» или «сдвинуты по фазе», если два сигнала не коррелируют от точки к точке.Это может быть вызвано индуктивными или нелинейными нагрузками. В этой ситуации коэффициент мощности будет меньше 1, и реальная мощность будет меньше.
Из-за возможных колебаний тока и напряжения в цепях переменного тока мощность измеряется несколькими способами.
Реальная или истинная мощность — это фактическая мощность, используемая в цепи, и измеряется в ваттах. В цифровых анализаторах мощности используются методы оцифровки сигналов входящего напряжения и тока для расчета истинной мощности в соответствии с методом, показанным на Рисунке 1.
В этом примере мгновенное напряжение умножается на мгновенный ток (I), а затем интегрируется за определенный период времени (t). Истинный расчет мощности будет работать с любым типом сигнала независимо от коэффициента мощности (рисунок 2).
Гармоники создают дополнительную сложность. Несмотря на то, что энергосистема номинально работает на частоте 60 Гц, существует много других частот или гармоник, которые потенциально могут существовать в цепи, а также может присутствовать составляющая постоянного или постоянного тока.Общая мощность рассчитывается путем рассмотрения и суммирования всего содержимого, включая гармоники.
Методы расчета, показанные на Рисунке 2, используются для обеспечения истинного измерения мощности и истинных измерений среднеквадратичного значения для любого типа сигнала, включая все гармонические составляющие, вплоть до полосы пропускания прибора.
Измерение мощности
Далее мы посмотрим, как на самом деле измерить мощность в данной цепи. Ваттметр — это прибор, который использует напряжение и ток для определения мощности в ваттах.Теория Блонделя утверждает, что общая мощность измеряется минимум на один ваттметр меньше, чем количество проводов. Например, однофазная двухпроводная схема будет использовать один ваттметр с одним измерением напряжения и одним измерением тока.
Однофазная трехпроводная двухфазная система часто встречается в проводке общего корпуса. Эти системы требуют двух ваттметров для измерения мощности.
В большинстве промышленных двигателей используются трехфазные трехпроводные схемы, которые измеряются двумя ваттметрами.Таким же образом потребуются три ваттметра для трехфазной четырехпроводной схемы, при этом четвертый провод является нейтралью.
На рисунке 3 показана трехфазная трехпроводная система с нагрузкой, подключенной с использованием метода измерения двух ваттметров. Измеряются два линейных напряжения и два связанных фазных тока (с помощью ваттметров Wa и Wc). Четыре измерения (линейный и фазный ток и напряжение) используются для достижения общего измерения.
Поскольку этот метод требует контроля только двух токов и двух напряжений вместо трех, установка и конфигурация проводки упрощаются.Он также может точно измерять мощность в сбалансированной или несбалансированной системе. Его гибкость и низкая стоимость установки делают его подходящим для производственных испытаний, когда требуется измерение только мощности или нескольких других параметров.
Для инженерных и научно-исследовательских работ лучше всего подходит трехфазный трехпроводной метод с тремя ваттметрами, поскольку он предоставляет дополнительную информацию, которая может использоваться для балансировки нагрузки и определения истинного коэффициента мощности. В этом методе используются все три напряжения и все три тока.Измеряются все три напряжения (от a до b, от b до c, от c до a), и контролируются все три тока.
Рис. 4. При проектировании двигателей и приводов ключевым моментом является просмотр всех трех значений напряжения и тока, что делает метод трех ваттметров на рисунке выше лучшим выбором.
Измерение коэффициента мощности
При определении коэффициента мощности для синусоидальных волн коэффициент мощности равен косинусу угла между напряжением и током (Cos Ø). Это определяется как коэффициент мощности «смещения» и подходит только для синусоидальных волн.Для всех других форм сигналов (несинусоидальных волн) коэффициент мощности определяется как активная мощность в ваттах, деленная на полную мощность в напряжении-амперах. Это называется «истинным» коэффициентом мощности и может использоваться для всех форм сигналов, как синусоидальных, так и несинусоидальных.
Однако, если нагрузка несимметрична (фазные токи разные), это может привести к ошибке при вычислении коэффициента мощности, поскольку в расчете используются только два измерения ВА. Два VA усредняются, потому что предполагается, что они равны; однако, если это не так, будет получен ошибочный результат.
Следовательно, лучше всего использовать метод трех ваттметров для несимметричных нагрузок, поскольку он обеспечит правильный расчет коэффициента мощности как для сбалансированных, так и для несимметричных нагрузок.
Анализаторы мощностиот Yokogawa и некоторых других компаний используют описанный выше метод, который называется методом подключения 3V-3A (три напряжения и три тока). Это лучший метод для инженерных и проектных работ, поскольку он обеспечивает правильные измерения общего коэффициента мощности и ВА для симметричной или несимметричной трехпроводной системы.
Основные измерения механической мощности
В электродвигателе механическая мощность определяется как скорость, умноженная на крутящий момент. Механическая мощность обычно определяется как киловатты (кВт) или лошадиные силы (л.с.), причем один ватт равен одному джоулю в секунду или одному ньютон-метру в секунду.
Лошадиная сила — это работа, выполняемая за единицу времени. Один л.с. равен 33 000 фунт-футов в минуту. Преобразование л.с. в ватты достигается с использованием этого соотношения: 1 л.с. = 745,69987 Вт.Однако преобразование часто упрощается за счет использования 746 Вт на л.с. (Рисунок 9).
Для асинхронных двигателей переменного тока фактическая скорость вращения ротора — это скорость вращения вала (ротора), обычно измеряемая с помощью тахометра. Синхронная скорость — это скорость вращения магнитного поля статора, рассчитанная как 120-кратная частота сети, деленная на количество полюсов в двигателе. Синхронная скорость — это теоретическая максимальная скорость двигателя, но ротор всегда будет вращаться немного медленнее, чем синхронная скорость из-за потерь, и эта разница скоростей определяется как скольжение.
Скольжение — это разница в скорости ротора и синхронной скорости. Для определения процента скольжения используется простой процентный расчет синхронной скорости минус скорость ротора, деленная на синхронную скорость.
КПД можно выразить в простейшей форме как отношение выходной мощности к общей входной мощности или КПД = выходная мощность / входная мощность. Для двигателя с электрическим приводом выходная мощность является механической, в то время как входная мощность является электрической, поэтому уравнение эффективности выглядит следующим образом: КПД = механическая мощность / входная электрическая мощность.
Часть 2: Выбор приборов для измерения и анализа мощности электродвигателя
Различные ассоциации разработали стандарты тестирования, которые определяют точность приборов, необходимых для соответствия их стандарту: IEEE 112 2004, NVLAP 160 и CSA C390. Все три включают стандарты для измерения входной мощности, напряжения и тока, датчиков крутящего момента, скорости двигателя и т. Д. Трансформаторы тока (CT) и трансформаторы напряжения (PT) являются одними из основных контрольно-измерительных приборов, используемых для выполнения этих измерений.
Соответствующие стандарты очень похожи, за некоторыми исключениями. Допустимые инструментальные ошибки для стандартов IEEE 112 2004 и NVLAP 150 идентичны; однако CSA C390 2006 имеет некоторые отличия в отношении температуры и показаний.
Например, входная мощность, необходимая для CSA C390 2006, составляет ± 0,5% от показания и должна включать ошибки CT и PT, тогда как для IEEE 112 2004 и NVLAP 150 требуется только ± 0,5% от полной шкалы.
Датчики тока
Датчики тока обычно требуются для тестирования, потому что сильный ток не может быть подан непосредственно в измерительное оборудование.Существует множество датчиков, подходящих для конкретных приложений. Накладные датчики могут использоваться с анализаторами мощности. Также можно использовать щупы для осциллографа, но при их использовании следует соблюдать осторожность, чтобы убедиться, что прибор не подвергается воздействию высоких токов.
Для трансформаторов тока подводящий провод может быть подключен через окно (трансформаторы тока обычно имеют форму пончика или продолговатую, с отверстием или внутренней частью, называемыми окном), или слаботочные соединения могут быть выполнены с клеммами в верхней части устройство.Шунты обычно используются для приложений постоянного тока, но не переменного тока или искаженных частот, хотя их можно использовать для синхронных двигателей с частотой до нескольких сотен Гц. Доступны специализированные трансформаторы тока, которые хорошо работают на высоких частотах, которые чаще встречаются в осветительных приборах, а не в двигателях и приводах.
Yokogawa вместе с LEM Instruments разработали уникальную систему трансформаторов тока, которая обеспечивает высокую точность в диапазоне от постоянного тока до кГц. Это трансформатор активного типа, использующий блок кондиционирования источника питания и обеспечивающий точность около 0.05 до 0,02% от показания. Этот тип системы трансформатора тока обеспечивает очень высокую точность измерений, особенно для частотно-регулируемых приводов, которая может изменяться от 0 Гц до рабочей скорости подключенного двигателя.
Трансформаторы напряжения просто преобразуют напряжение с одного уровня на другой. В измерительных приложениях иногда требуются понижающие трансформаторы для снижения напряжения, подаваемого на измерительный прибор, хотя многие приборы могут работать с относительно высокими напряжениями и не требуют понижающего трансформатора.
Измерительные трансформаторы обычно представляют собой комбинацию трансформатора тока и трансформатора напряжения и могут уменьшить количество требуемых преобразователей в некоторых измерительных приложениях.
Рекомендации по выбору и меры предосторожности
При принятии решения, какое устройство использовать, первым вопросом является частотный диапазон измеряемых параметров. Для синусоидальных волн постоянного тока можно использовать шунты постоянного тока, которые обеспечивают высокую точность и простую установку. Для приложений переменного и постоянного тока можно использовать эффект Холла или измерительный трансформатор активного типа.Технология эффекта Холла имеет более низкий уровень точности, в то время как активный тип обеспечивает большую точность. Различные измерительные трансформаторы могут работать на высоких частотах 30 Гц и более, но их нельзя использовать для постоянного тока.
Следующее соображение — требуемый уровень точности. Для измерительного трансформатора это обычно указывается как точность передаточного числа витков. Фазовый сдвиг — еще один важный фактор, и он очень важен, потому что многие трансформаторы предназначены только для измерения тока и не имеют компенсации фазового сдвига.
Фазовый сдвиг в основном зависит от коэффициента мощности для измерения мощности и, таким образом, влияет на расчет мощности. Например, трансформатор тока, который имеет максимальный фазовый сдвиг 2 ° как часть своей спецификации, внесет ошибку косинуса (2 °) или ошибку 0,06%. Пользователь должен решить, приемлем ли этот процент ошибок для приложения.
Источником тока является трансформатор тока. Согласно закону Ома, напряжение (E) равно току через проводник (I), умноженному на сопротивление (R) проводника в омах.Открытие вторичной обмотки трансформатора тока эффективно увеличивает сопротивление до бесконечности. Это означает, что внутренний ток насыщает катушку, напряжение также стремится к бесконечности, и устройство повреждается или разрушается. Что еще хуже, трансформатор тока со случайно разомкнутой вторичной обмоткой может серьезно травмировать рабочих.
Никогда не размыкайте вторичную обмотку трансформатора тока. Пользователи могут получить серьезные травмы, а CT может быть поврежден или разрушен.
Совместимость приборов
Для определения совместимости прибора необходимо определить выходной уровень ТТ.Клеммные и другие трансформаторы тока обычно имеют выходную мощность, указанную в милливольтах на ампер, миллиампер на ампер или в амперах. Типичный выходной ток измерительного ТТ может быть указан в диапазоне от 0 до 5 ампер.
Необходимо учитывать импеданс и нагрузку на ТТ, которые являются факторами, на которые влияет количество проводов, используемых для подключения ТТ к прибору. Эта проводка является сопротивлением или нагрузкой на прибор и, следовательно, может повлиять на измерения.
Пробникипри неправильном использовании могут создавать собственный набор проблем.Многие пробники осциллографа рассчитаны на работу с входным сопротивлением осциллографа, но диапазоны входного сопротивления анализатора мощности могут отличаться, и это необходимо учитывать.
Еще один аспект, который следует учитывать при определении совместимости прибора, — это физические требования к устройству. Размер необходимо учитывать вместе с типом трансформатора тока, например, зажимного или кольцевого типа, каждый из которых будет лучше работать в конкретной ситуации.
Пример системы трехфазного двигателя
Теперь мы рассмотрим типичное трехфазное трехпроводное измерение мощности двигателя с использованием метода двух ваттметров.Теорема Блонделя утверждает, что количество требуемых измерительных элементов на единицу меньше количества токонесущих проводников. Это позволяет измерять мощность в трехфазной трехпроводной системе с использованием двух преобразователей при отсутствии нейтрали. Однако, когда есть нейтраль, используются три преобразователя, поскольку теперь имеется четыре проводника.
Трехфазное питание используется в основном в коммерческих и промышленных средах, особенно для питания двигателей и приводов, поскольку более экономично эксплуатировать большое оборудование с трехфазным питанием.Для расчета трехфазной мощности напряжение каждой фазы умножается на ток каждой фазы, который затем умножается на коэффициент мощности, и это значение умножается на квадратный корень из трех (квадратный корень из 3 равен равно 1,732).
Для измерения трехфазной мощности, потребляемой нагруженным двигателем, подключается анализатор мощности. На рисунке 1 показано типичное соединение с дисплеем, на котором показаны все три напряжения, все три тока, общая мощность и коэффициент мощности.
На рисунке 2 показано трехфазное трехпроводное измерение мощности, выполненное с использованием метода двух ваттметров.Перечислены все три тока и напряжения, а также общие ВА и ВАР. Эта конфигурация может отображать отдельные показания мощности фазы, но их не следует использовать напрямую, потому что для этого метода измерения только полная мощность является точным показанием.
В основном, при использовании метода двух ваттметров в трехпроводной трехфазной системе невозможно измерить мощность отдельной фазы, а также невозможно измерить какие-либо параметры фазы, включая коэффициенты мощности фазы. Однако можно измерить все параметры фазы.
Для трехфазного двигателя с трехпроводным соединением в треугольник можно измерять линейные напряжения и токи отдельных фаз. Поскольку нейтрали нет, измерять фазные напряжения невозможно. Эта ситуация приводит к некоторым показаниям, которые необходимо пояснить.
Глядя на отображение формы сигнала на Рисунке 3, можно увидеть линейные напряжения Vab, Vbc и Vac. Линейные напряжения, измеряемые прибором, в сбалансированной системе разнесены на 60 °. Токи — это фазные токи, которые приборы видят под углом 120 °.
Другое представление этой системы изображено на векторной диаграмме Phasor, показанной на рисунке 4. Треугольник в верхней части этого рисунка показывает измерения линейного напряжения черным цветом, значения фазного напряжения — красным (но это теоретические потому что нейтрали нет), а фазные токи синим цветом.
В нижней части рисунка показаны разности фаз между напряжениями и токами. Опять же, обратите внимание, что линейные напряжения разнесены на 60 °, а фазные токи разнесены на 120 °.Еще одна деталь заключается в том, что если бы верхняя диаграмма представляла чисто резистивную нагрузку, то синие токи были бы синхронизированы с красными напряжениями. Однако при индуктивной нагрузке (например, в двигателе) синие векторы тока не совпадают по фазе с напряжениями.
Кроме того, для этого метода измерения на нижней диаграмме векторы тока всегда будут иметь дополнительный сдвиг на 30 ° по сравнению с напряжениями. Суть в том, что правильно настроенный анализатор мощности учтет все эти условия.
Что, если фазовая мощность и фазовый коэффициент мощности должны быть точно измерены в трехфазной трехпроводной системе, а не просто приблизительно? На рисунке 5 показан метод, позволяющий измерять фазовые параметры трехфазного трехпроводного двигателя путем создания плавающей нейтрали.
Однако у этой техники есть ограничения. Он будет хорошо работать на входе асинхронного двигателя, синхронного двигателя или аналогичного двигателя без привода с регулируемой скоростью. Следует соблюдать осторожность при использовании этого метода в системе привода с регулируемой скоростью, поскольку высокочастотные искаженные формы сигналов и гармоники могут привести к несогласованным измерениям.
Более того, метод плавающей нейтрали работает только для оборудования с сигналами синусоидального типа. С помощью привода с широтно-импульсной модуляцией (ШИМ) можно включить линейный фильтр 500 Гц (фильтр нижних частот), который затем позволит отображать показания для основной частоты, но не для общей частоты.
Трехпроводные и четырехпроводные измерения мощности
Важно понимать, что мощность будет считываться одинаково независимо от того, измерена ли она трехфазным трехпроводным или трехфазным четырехпроводным методом.Однако при трехфазном четырехпроводном соединении измеряемые значения напряжения представляют собой фазные напряжения от линии к нейтрали.
Рисунок 6 — снимок экрана анализатора мощности, который показывает, насколько похожи показания мощности и коэффициента мощности для ШИМ-привода, работающего с двигателем, сравнивая трехфазный трехпроводной вход с фильтром 500 Гц с трехфазным четырехпроводным. вход с плавающей нейтралью.
В альтернативном решении используется функция измерения дельты, которая есть в анализаторах мощности Yokogawa.Функция измерения дельты использует мгновенные измерения линейного напряжения и фазного тока для получения истинного межфазного напряжения, даже если фазы не сбалансированы. Это возможно благодаря вычислению векторной амплитуды внутри процессора. Эта функция также обеспечивает измерения фазной мощности в трехпроводной цепи. Решение для измерения дельты также обеспечивает нейтральный ток.
Часть 3: Измерения электрической мощности для трехфазного двигателя переменного тока
Полное тестирование системы привода и двигателя на основе ШИМ (широтно-импульсной модуляции) представляет собой трехэтапный процесс.Шаг 1 — это точное измерение входной и выходной мощности привода с регулируемой скоростью ШИМ для определения эффективности привода и потерь мощности. Шаг 2 — это точное измерение входной мощности двигателя, а шаг 3 — точное измерение механической мощности двигателя.
Оптимальный метод — объединить все три этапа с помощью одного анализатора мощности, чтобы исключить временной сдвиг. Это также обеспечивает отличные расчеты эффективности, все в едином программно-аппаратном решении.
Рисунок 7: Этот снимок экрана анализатора мощности показывает, как функцию измерения дельты можно использовать для получения истинных показаний и мощности фазы, даже если фазы не сбалансированы.
Некоторые анализаторы мощности имеют опцию двигателя, в которой сигналы скорости и момента могут быть интегрированы таким образом. Эти анализаторы мощности могут измерять электрическую мощность и механическую мощность и отправлять данные на ПК с запущенным программным обеспечением от оригинального производителя анализатора или заказным программным обеспечением от системного интегратора.
Измерения привода ШИМ для двигателей переменного тока
При использовании частотно-регулируемого привода с ШИМ для управления двигателем часто бывает необходимо измерить как входной, так и выходной сигнал частотно-регулируемого привода с помощью шестифазного анализатора мощности.Эта установка может не только измерять трехфазную мощность, она также может измерять мощность постоянного или однофазного тока. См. Рисунок 1.
В зависимости от анализатора, режим настройки будет выполняться в нормальном или среднеквадратичном режиме. Конфигурация проводки должна соответствовать применению, например, трехфазный вход и трехфазный выход.
Любой линейный фильтр или фильтр нижних частот должны быть отключены, потому что фильтрация затрудняет измерения. Однако фильтр пересечения нуля или частотный фильтр должен быть включен, потому что он будет фильтровать высокочастотный шум, чтобы можно было измерить основную частоту.Это измерение необходимо при отслеживании частоты привода.
На рис. 2 показан сигнал выходного напряжения ШИМ с сильно искаженным напряжением, срезанными высокими частотами и с большим количеством шумов на токовой стороне, что затрудняет измерение. Высокочастотное переключение сигнала напряжения создает сильно искаженную форму волны с высоким содержанием гармоник. Частота варьируется от 0 Гц до рабочей скорости.
Для такого зашумленного сигнала нужны специальные датчики тока для измерения.Для точных измерений мощности с ШИМ также необходимы анализаторы мощности с широкой полосой пропускания, способные измерять эти сложные сигналы.
На рисунке 3 показан пример содержания гармоник напряжения на выходе ШИМ. Присутствуют частоты биений, а содержание гармоник напряжения превышает 500 порядков (примерно 30 кГц). Большая часть гармоник приходится на нижние частоты на токовой стороне.
Проблемы измерения привода двигателя с ШИМ
Напряжение инвертора обычно измеряется одним из двух способов.Можно использовать истинное среднеквадратичное измерение, которое включает полное содержание гармоник. Однако, поскольку основная форма волны — это в первую очередь то, что способствует крутящему моменту двигателя, можно выполнить и использовать более простые измерения. В большинстве приложений требуется только измерение основной формы волны.
Существует два основных метода измерения основной амплитуды волны напряжения. Первый и самый простой — использовать фильтр нижних частот для удаления высоких частот. Если в анализаторе мощности есть этот фильтр, просто включите его.Правильная фильтрация даст среднеквадратичное значение напряжения основной частоты инвертора. Однако этот тип фильтрации не обеспечивает истинного измерения полной мощности, поэтому фильтрация — не самый требовательный метод.
Второй метод — это метод измерения выпрямленного среднего, который выдает среднеквадратичное значение напряжения основной волны без фильтрации с использованием определения среднего значения напряжения, масштабированного до среднеквадратичного напряжения. Алгоритм выпрямленного среднего среднего за цикл обеспечит эквивалент основного напряжения, который будет очень близок к среднеквадратичному значению основной волны.
С помощью этого метода можно измерить общую мощность, общий ток и напряжение основной гармоники.
Измерение амплитуды основной волны с помощью гармонического анализа
Функцию гармонического анализа можно использовать для определения истинного основного напряжения с помощью быстрого преобразования Фурье (БПФ) для определения амплитуды каждой гармонической составляющей, включая основную волну. Это дает точное измерение среднеквадратичного напряжения основной волны. Новейшие анализаторы мощности могут выполнять одновременные измерения истинных среднеквадратичных значений и гармонических составляющих.
На рисунке 4 Urms2 (среднеквадратичное значение на выходе ШИМ) является очень большим числом, а F2 (среднее значение основной гармоники) несколько ниже. Значение Urms3 (фильтрация основного) дает аналогичный результат. Наконец, U2 (1) получается из анализа гармоник или вычислений FFT основной гармоники. F2, Urms3 и U2 (1) дают очень близкие результаты, но расчет U2 (1) FFT считается наиболее точным.
Инверторный ток обычно измеряется только в одном направлении, и это как истинный среднеквадратичный сигнал, потому что все гармонические токи способствуют повышению температуры в двигателе и ответственны за него, поэтому все они должны быть измерены.
Еще одно важное измерение включает напряжение привода В / Гц (Вольт-на-Герц). Привод с ШИМ должен поддерживать постоянное соотношение В / Гц по сравнению с рабочей скоростью двигателя. Анализатор мощности может рассчитывать В / Гц, используя среднеквадратичное значение или значение основного напряжения. Определенная пользователем математическая функция анализатора используется для построения уравнения для этого измерения.
Измерение напряжения шины постоянного тока
Напряжение на шине постоянного тока в ШИМ может быть измерено для проверки условий повышенного и пониженного напряжения.Это измерение может быть выполнено внутри привода на клеммах конденсаторной батареи. Однако более простой способ — использовать отображение формы сигнала анализатора мощности с измерением курсора.
При отображении формы сигнала с помощью курсорного измерения необходимо убедиться, что курсор не находится прямо над небольшими выступами на дисплее. Вместо этого курсор должен находиться поперек осциллограммы, чтобы выполнить точное измерение. На рисунке 5 показано измерение напряжения ШИМ с высокоскоростным переключением.Курсор устанавливается для чтения значения, например 302,81 В.
Измерения механической мощности
Механическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя. На рынке существует множество различных типов датчиков скорости и крутящего момента, которые работают с различными двигателями. Хотя анализаторы Yokogawa могут взаимодействовать с большинством датчиков скорости и крутящего момента, все же целесообразно подтверждать совместимость в каждом случае. Эти датчики могут использоваться для предоставления информации о механических измерениях для расчета измерений механической мощности в анализаторе мощности.
Многие датчики поставляются с интерфейсной электроникой для правильной обработки сигнала для работы с анализаторами мощности или другим оборудованием. Кондиционированный сигнал может быть аналоговым выходом или выходом последовательной связи, который идет на ПК и его прикладное системное программное обеспечение.
Одним из вариантов измерения механической мощности является использование как датчика, так и соответствующего измерительного прибора от данного производителя. Такой подход имеет преимущества, поскольку датчики будут точно согласованы с прибором.Будут доступны показатели крутящего момента, скорости и мощности, и, вероятно, будут варианты подключения к ПК вместе с соответствующим прикладным программным обеспечением.
Более интегрированный подход изображен на рисунке 6. В этой конфигурации выходные сигналы скорости и крутящего момента от измерительных приборов датчика подключаются непосредственно к входам скорости и крутящего момента анализатора мощности. Это дает большое преимущество, заключающееся в том, что измерения электрической и механической мощности могут оцениваться одновременно, а расчеты эффективности могут выполняться непрерывно.
КПД двигателя, привода и системы
КПД инвертора в простейшей форме рассчитывается как выходная мощность, деленная на входную мощность, и выражается в процентах. Один из методов, используемых для измерения входной и выходной мощности, заключается в простом подключении измерителей мощности на входе и выходе, при этом показания двух измерителей используются для расчета эффективности.
Более комплексный метод — использовать анализатор мощности с несколькими входами для одновременного измерения входа и выхода, как показано на рисунке 1.Это приводит к более точному расчету эффективности, поскольку он использует один анализатор мощности для устранения потенциальных ошибок, вызванных измерениями временного сдвига.
С помощью внутренних математических вычислений, предоставляемых анализатором, можно настроить очень простое вычисление через меню для расчета потерь привода и эффективности привода.
Какой метод мне следует использовать?
IEEE 112 — это промышленный стандарт США для тестирования двигателей, в котором описаны несколько методов.На рисунке 7 показан дисплей анализатора мощности, поддерживающий «Метод A» стандарта IEEE 112, в котором вся механическая мощность делится на общую потребляемую мощность двигателя. Стандарт определяет многие параметры, помимо измерений тока и напряжения двигателя, и предоставляет инструкции по проведению общепринятых испытаний многофазных и асинхронных двигателей и генераторов и составлению отчетов по ним. Кроме того, стандарт содержит 11 методов испытаний, чтобы определить, как проводить измерения эффективности двигателей.
Метод испытаний A — ввод-вывод, определенный в IEEE 112: КПД рассчитывается как отношение выходной мощности измерения к измеренной входной мощности после корректировки температуры и динамометра, если применимо.Испытания проводятся при номинальной нагрузке с помощью механического тормоза или динамометра. Этот рейтинг должен быть ограничен двигателями с номинальной полной нагрузкой не более 1 кВт.
Метод испытаний B — ввод-вывод с разделением потерь: в методе B выполняются измерения как входной, так и выходной мощности, но различные потери разделяются. Большинство этих потерь просто производят тепло, которое должно рассеиваться двигателем в сборе, и представляют собой энергию, недоступную для выполнения работы. Этот метод является признанным стандартом тестирования U.S. автомобилестроение для двигателей с полной нагрузкой от 1 до 300 кВт.
Хотя оба метода A и B работают, метод B требует большого количества приборов и обычно выполняется только производителями двигателей. Поскольку большинство производителей используют метод B, а большинство пользователей предпочитают метод A, расчеты эффективности между ними могут отличаться. Данные производителей двигателей и приводов могут использовать разные скорости двигателя, испытательные нагрузки или другие условия испытаний.
Заключение
При измерении мощности электродвигателя необходимо учитывать множество факторов, например, полный и истинный коэффициент мощности.Эти измерения включают сложные уравнения, поэтому большинство компаний используют анализаторы мощности для автоматического получения результатов.
После принятия решения об использовании анализатора мощности необходимо принять решение о частотном диапазоне и уровне точности. Совместимость приборов — еще один важный аспект безопасного получения точных показаний, особенно с трансформаторами тока, и это та область, где необходимо учитывать ввод / опции анализатора. При правильных входных сигналах датчиков измерения механической мощности также можно проводить с помощью анализатора мощности.Выбор правильных датчиков скорости и крутящего момента — это первый шаг в определении механической мощности.
Некоторые анализаторы мощности также позволяют выполнять измерения с широтно-импульсной модуляцией. Однако настройка анализатора для измерения ШИМ также требует знания о том, как токи и напряжения будут влиять на измерения мощности.
Прецизионный высокочастотный анализатор мощности — важный инструмент для измерения как механической, так и электрической мощности. Его функции анализа и показания могут помочь улучшить работу и даже продлить срок службы двигателя.Выбор подходящего анализатора и его правильная реализация требуют знаний; однако при правильном использовании данные анализатора мощности предоставят точные и очень ценные данные.
.
