Как устроен асинхронный двигатель. Какие основные части входят в его конструкцию. Как работает асинхронный двигатель. Какие существуют типы асинхронных двигателей. Каковы преимущества асинхронных двигателей.
Основные части асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
Статор и ротор разделены воздушным зазором. Каждая из этих частей имеет сердечник и обмотку.
Устройство статора
Статор асинхронного двигателя включает в себя:
- Корпус — изготавливается из алюминиевого сплава, чугуна или стали
- Сердечник статора — собран из тонких листов электротехнической стали
- Обмотка статора — размещается в пазах сердечника
Сердечник статора имеет цилиндрическую форму с продольными пазами на внутренней поверхности. В эти пазы укладывается трехфазная обмотка статора.
Устройство ротора
Существует два основных типа роторов асинхронных двигателей:

- Короткозамкнутый ротор
- Фазный ротор
Короткозамкнутый ротор имеет следующую конструкцию:
- Сердечник из шихтованной электротехнической стали
- Обмотка в виде «беличьей клетки» из медных или алюминиевых стержней
- Короткозамыкающие кольца на торцах ротора
Фазный ротор отличается наличием трехфазной обмотки, выведенной на контактные кольца.
Принцип работы асинхронного двигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.
Основные этапы работы асинхронного двигателя:
- При подключении обмотки статора к трехфазной сети создается вращающееся магнитное поле
- Магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС
- Под действием ЭДС в обмотке ротора возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент
- Ротор начинает вращаться в сторону вращения магнитного поля статора
Типы асинхронных двигателей
Существует несколько основных типов асинхронных двигателей:

По числу фаз питающего напряжения:
- Трехфазные
- Однофазные
По типу ротора:
- С короткозамкнутым ротором
- С фазным ротором
По числу пар полюсов:
- Двухполюсные
- Четырехполюсные
- Многополюсные
Наиболее распространенными являются трехфазные асинхронные двигатели с короткозамкнутым ротором.
Преимущества асинхронных двигателей
Асинхронные двигатели имеют ряд важных преимуществ:
- Простая и надежная конструкция
- Низкая стоимость
- Высокий КПД (до 95%)
- Минимальные эксплуатационные расходы
- Возможность работы напрямую от сети
- Стабильная частота вращения
Эти преимущества обусловили широкое применение асинхронных двигателей в промышленности и быту.
Области применения асинхронных двигателей
Благодаря своим достоинствам асинхронные двигатели нашли применение во многих сферах:
- Промышленные приводы станков и механизмов
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортные машины
- Бытовая техника (холодильники, стиральные машины)
- Электротранспорт
- Электроинструмент
Широкий диапазон мощностей от долей ватта до нескольких мегаватт позволяет использовать асинхронные двигатели практически во всех отраслях.

Устройство обмотки статора асинхронного двигателя
Обмотка статора асинхронного двигателя играет ключевую роль в его работе. Рассмотрим ее устройство подробнее:
Основные элементы обмотки статора:
- Пазовая часть — расположена в пазах сердечника статора
- Лобовые части — находятся за пределами сердечника
- Выводные концы — для подключения к питающей сети
Обмотка статора обычно выполняется трехфазной и состоит из трех отдельных обмоток, сдвинутых в пространстве на 120 электрических градусов.
Способы соединения фаз обмотки статора:
- Звезда — концы фаз соединяются в общую точку
- Треугольник — конец каждой фазы соединяется с началом следующей
Выбор схемы соединения зависит от напряжения сети и параметров двигателя.
Характерные неисправности асинхронных двигателей
Несмотря на высокую надежность, асинхронные двигатели могут выходить из строя. Основные неисправности:
Неисправности статора:
- Межвитковые замыкания в обмотке
- Пробой изоляции на корпус
- Обрыв фазы обмотки
Неисправности ротора:
- Обрыв стержней короткозамкнутой обмотки
- Ослабление крепления стержней к короткозамыкающим кольцам
- Эксцентриситет ротора
Неисправности подшипников:
- Износ рабочих поверхностей
- Разрушение сепаратора
- Повреждение уплотнений
Для выявления неисправностей применяются различные методы диагностики, включая анализ вибрации и спектральный анализ токов статора.

Способы пуска асинхронных двигателей
Существует несколько способов пуска асинхронных двигателей в зависимости от их мощности и условий эксплуатации:
Прямой пуск
Самый простой способ — подключение обмотки статора напрямую к сети. Применяется для двигателей небольшой мощности.
Пуск переключением со звезды на треугольник
При пуске обмотки соединяются звездой, а затем переключаются на треугольник. Позволяет снизить пусковой ток.
Пуск с помощью автотрансформатора
Используется пониженное напряжение от автотрансформатора, которое постепенно повышается.
Частотный пуск
Применение преобразователя частоты позволяет плавно регулировать скорость и момент при пуске.
Реостатный пуск
Для двигателей с фазным ротором используются пусковые реостаты в цепи ротора.
Выбор способа пуска зависит от требований к пусковому току и моменту, а также от условий работы электропривода.
Устройство асинхронного двигателя. Принцип работы
Автор Alexey На чтение 7 мин Просмотров 1.7к. Опубликовано Обновлено
Содержание
- Назначение основных частей трехфазных асиннхронных двигателей
- Виды асинхронных электродвигателей
- Устройство статора асинхронных двигателей
- Соединения обмоток статора
- Устройство короткозамкнутого ротора
- Устройство фазного ротора
- Характерные поломки асинхронных двигателей
- Однофазный асинхронный двигатель
Без электрических двигателей совершенно нереально представить себе функционирование современной жизни. Наиболее популярным и востребованным является асинхронный трёхфазный асинхронный электродвигатель с короткозамкнутым ротором в виду его простой и надёжной конструкции, которая обеспечивает отличные механические характеристики.
Внутреннее устройство электромотора и его принцип работы вызывает резонный интерес, как в познавательном плане, так и с практической точки зрения — знание конструктивных особенностей асинхронного двигателя, влияющих на его параметры, поможет при выборе электродвигателя, его эксплуатации и обслуживании. Подробнее о теории работы асинхронного двигателя я объясняю и описываю в статье Принцип работы асинхронного электрического двигателя
Назначение основных частей трехфазных асиннхронных двигателей
В любом двигателе есть две основные составляющие – неподвижный статор, закрепляемый на станине, и вращающийся ротор, через вал которого осуществляется передача механической энергии.
В отношении электродвигателей и трансформаторов катушки с проводом принято называть обмотками из-за технологических процессов при их создании. Магнитопровод статора (сердечника), в котором укладываются обмотки, помещается в защитный металлический кожух, служащий также теплоотводом с ребристой поверхностью.
Ротор нигде не соприкасается со статором и вращается на подшипниках, закрепляемых на торцевых крышках, или отдельно на станине. Торцевые крышки крепятся к кожуху при помощи болтов. Механическая энергия снимается с вала в передней части двигателя при помощи шкива, шестерни или муфты.
Схема устройства асинхронного трёхфазного двигателяНа вал ротора с тыльной стороны мотора крепится защищённый кожухом вентилятор для обдува ребристого корпуса, на котором находится клеммник подключения вводного кабеля, питающего электромотор.
Виды асинхронных электродвигателей
Узнав кратко, из чего состоит большинство электродвигателей, можно перейти к рассмотрению асинхронных двигателей. Описание электромагнитных взаимодействий, происходящих в асинхронном двигателе, не входит в рамки данной статьи, но коротко можно сказать, что в статоре создаётся вращающееся магнитное поле, взаимодействующее с полем ротора.
Схема принципа действия асинхронного двигателяАсинхронный – означает, что вал ротора не вращается синхронно с вращающимся магнитным полем статора. Широко используются две разновидности данного типа трехфазных электромоторов, которые имеют такие официальные названия:
Широко используются две разновидности данного типа трехфазных электромоторов, которые имеют такие официальные названия:
- асинхронный двигатель с короткозамкнутым ротором;
- асинхронный двигатель с фазным ротором.
Конструкции статора данных типов электродвигателей являются идентичными, а различия заключаются в конструктивном исполнении ротора.
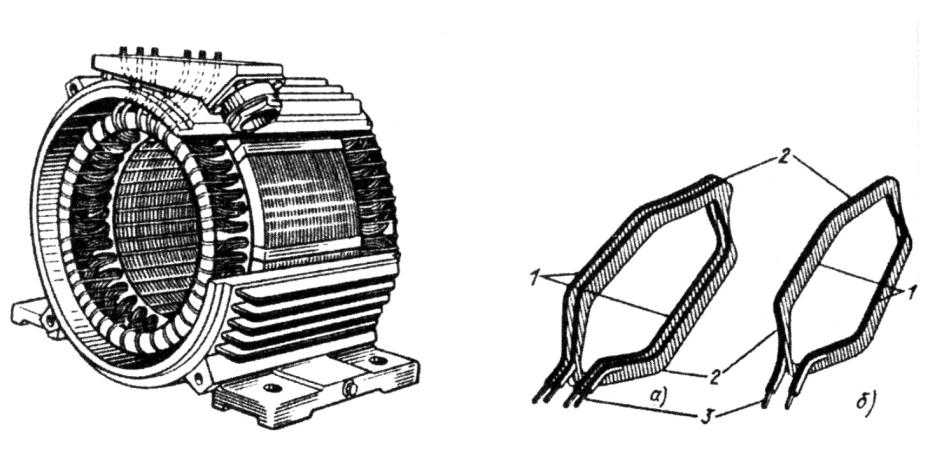
Для недопущения образования вихревых токов, возникающих при переменном электромагнитном поле, магнитопровод статора набирают из одинаковых колец специальной электротехнической стали методом шихтовки (от немецкого Schicht — набор). В кольцах с внутренней стороны на специальном оборудовании выбивают пазы сложной формы.
а) статор в сборе с обмотками , б) магнитопровод и кольцо эл. сталиПри укладке колец в пакет статора добиваются полного совпадения данных пазов, предназначенных для укладки обмоток.
Набор сложенных пластинчатых колец фиксируют при помощи специальных скоб и запрессовывают в защитный кожух двигателя, который также несёт механические нагрузки и служит для охлаждения.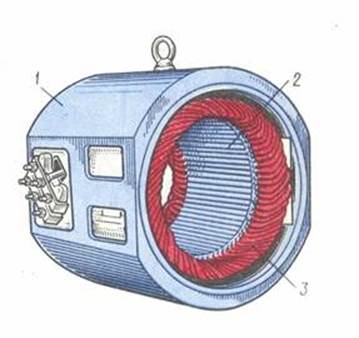 Обмотки статора мотают на специальном станке в виде рамок, укладываемых в определённые пазы статорного магнитопровода.
Обмотки статора мотают на специальном станке в виде рамок, укладываемых в определённые пазы статорного магнитопровода.
Перед укладкой обмотки паз изолируют при помощи диэлектрической прокладки.
диэлектрическая прокладка в пазуРабочие осторожно помещают рамки обмоток в пазы, не допуская повреждения эмалированной изоляции проводов.
рамки статораВ зависимости от конструктивных особенностей статора, в один паз может быть помещено несколько рамок – в этом случае их также изолируют друг от друга диэлектрическими прокладками
продолговатый клин из стекловолокнаУложенные обмотки в каждом пазу фиксируют при помощи специальной вставки в форме продолговатого клина из стекловолокна.
Каждую уложенную в пазы обмотку проверяют на обрыв, пробой и межвитковое замыкание. После этого выводы рамок соединяют в фазные обмотки, в зависимости требуемого от количества пар полюсов.
Асинхронные электродвигатели с одной парой полюсов вращающегося магнитного поля имеют максимально возможные для частоты 50 Гц обороты идеального холостого хода – 3000 в минуту.
При помощи параллельных и последовательных подключений рамок обмоток определённым способом создают дополнительные полюсы вращающегося электромагнитного поля для уменьшения оборотов вала ротора. Все электрические соединения проводов обмоток выполняют при помощи сварки, реже – пайки.
Таким способом формируют фазные обмотки, геометрические оси которых располагаются под углом 120º. Выводы от фазных обмоток выводят в коробку подключения. По другому данный клеммник называется блоком распределения начал обмоток (БРНО). Петли обмоток, выходящие из пазов магнитопровода статора, называют лобовыми обмоточными частями.
Провода обмоток в лобовой части обматывают бандажными лентами для механической фиксации.
обмотка монтажной лентой проводовПосле выполнения всех работ, статор погружают в лак, который высыхая, придает конструкции электрическую и дополнительную механическую прочность.
Устройство короткозамкнутого ротора
Короткозамкнутый ротор также состоит их шихтованных колец, в которых по внешней окружности пробивают пазы для укладки короткозамкнутых витков, которые делают из меди (для мощных двигателей более 50 кВт) и алюминия.
С торцов ротора данные витки замыкаются накоротко при помощи колец (медных или алюминиевых).
Принципиальная схема короткозамкнутого ротораВизуально обмотка короткозамкнутого ротора без магнитопровода похожа на беличье колесо.
В данных витках благодаря трансформации индуцируется ток, возбуждающий электромагнитное поле ротора, взаимодействующее с вращающимся полем статора. Для упрощения процесса изготовления витков сложной формы используют заливку расплавленного алюминия в пазы ротора.
От формы поперечного сечения короткозамкнутых витков ротора зависит такая механическая характеристика асинхронного двигателя как начальный вращательный момент запуска, увеличения которого добиваются путём добавления дополнительных пусковых витков.
Используя особенности распределения силовых линий электромагнитного поля, добиваются больших токов в пусковых обмотках ротора при запуске двигателя, которые уменьшаются при наборе оборотов. Вал ротора запрессовывается в магнитопровод по его оси.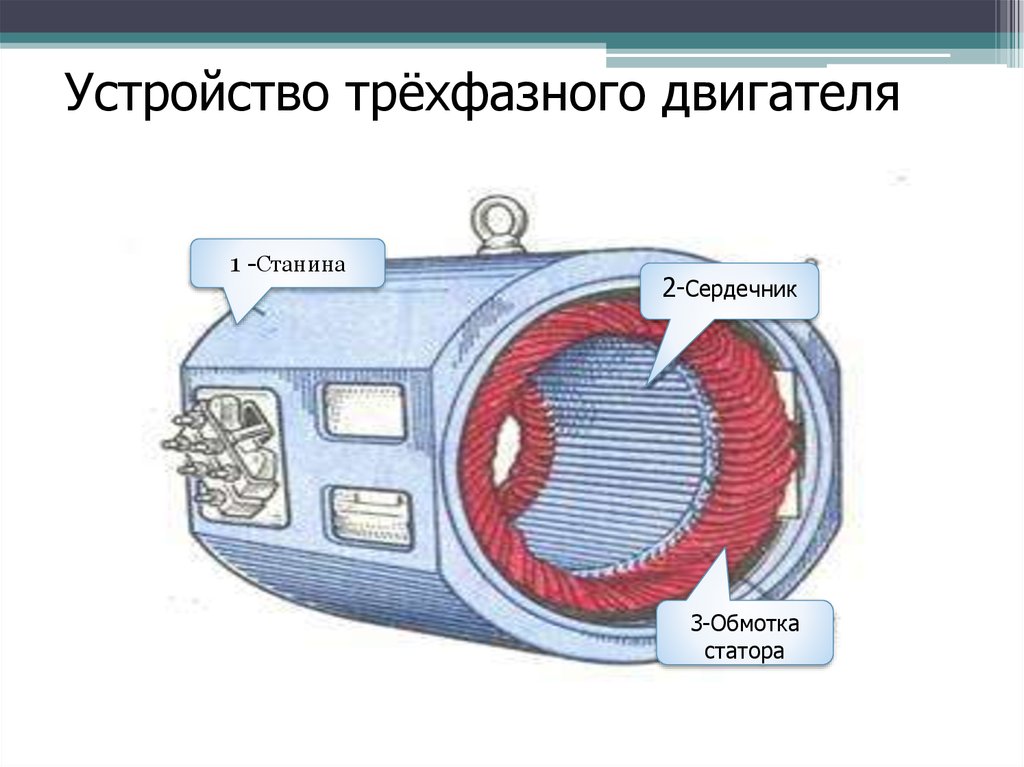 Замыкающие кольца часто имеют лопатки, которые выполняют функцию внутреннего вентилятора, обеспечивающего циркуляцию воздуха внутри электромотора.
Замыкающие кольца часто имеют лопатки, которые выполняют функцию внутреннего вентилятора, обеспечивающего циркуляцию воздуха внутри электромотора.
Из-за того, что роторная электрическая цепь не контактирует с внешними цепями, не требуется контактных узлов, что делает асинхронный двигатель с короткозамкнутым ротором наиболее износоустойчивым по сравнению с другими типами электродвигателей.
Устройство фазного ротора
В пазах фазного ротора укладываются фазные обмотки, соединённые звездой, и подключённые к контактным кольцам, через которые осуществляется включение в регулирующую внешнюю цепь.
Асинхронный двигатель с фазным ротором, благодаря добавлению обмоток, в зависимости от внешней регулирующей цепи может использоваться:
- Для плавного запуска электродвигателя и уменьшения пусковых токов при помощи реостатов, подключённых к контактным кольцам. По мере запуска двигателя сопротивление реостатов уменьшается одновременно для всех фаз ротора. При наборе оборотов реостаты отключаются и кольца замыкаются.
- Для поддержания постоянных оборотов двигателя при включении в цепи фазных обмоток ротора дросселей, реактивное сопротивление которых увеличивается с увеличением оборотов, что уменьшает магнитное поле ротора и вращательный момент;
- Для увеличения пускового момента на фазные обмотки подают постоянное или переменное напряжение в противофазе статору.
Характерные поломки асинхронных двигателей
От точности выполнения ротора и статора зависит воздушный магнитный зазор, увеличение которого негативно влияет на производительность и коэффициент полезного действия электродвигателя. Поэтому, стараются данный зазор максимально уменьшить.
поперечный разрез двигателяДля предотвращения вибраций и биений ротора, его тщательно центрируют перед помещением в статор. Износ подшипников, и в частности, выход из строя сепаратора шарикоподшипников, приводит к перекосу ротора и его трению об магнитопровод статора.
укладка обмоток в пазы ротораКак правило, после замены подшипников данные повреждения не имеют значительного влияния на работоспособность мотора, но увеличится вибрация из-за разбалансировки ротора.
Обмотки статора наиболее часто подвержены межвитковому замыканию, которое происходит из-за повреждения эмалевой изоляции проводов из-за перегрева. Можно самостоятельно прозвонить обмотки и даже выявить место пробоя между витками, но перемотать обмотки в кустарных условиях не представляется возможным, и при такой поломке двигатель нужно отдавать на перемотку.
Видео: устройство трехфазного асинхронного электродвигателяОднофазный асинхронный двигатель
В однофазном двигателе используется две обмотки. Одна рабочая, другая стартова. Стартовая нужна для того, чтобы придать первоначальное вращение ротора, затем она отключается. Более подробно принцип работы такого двигателя, смотрите в видео ниже
5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
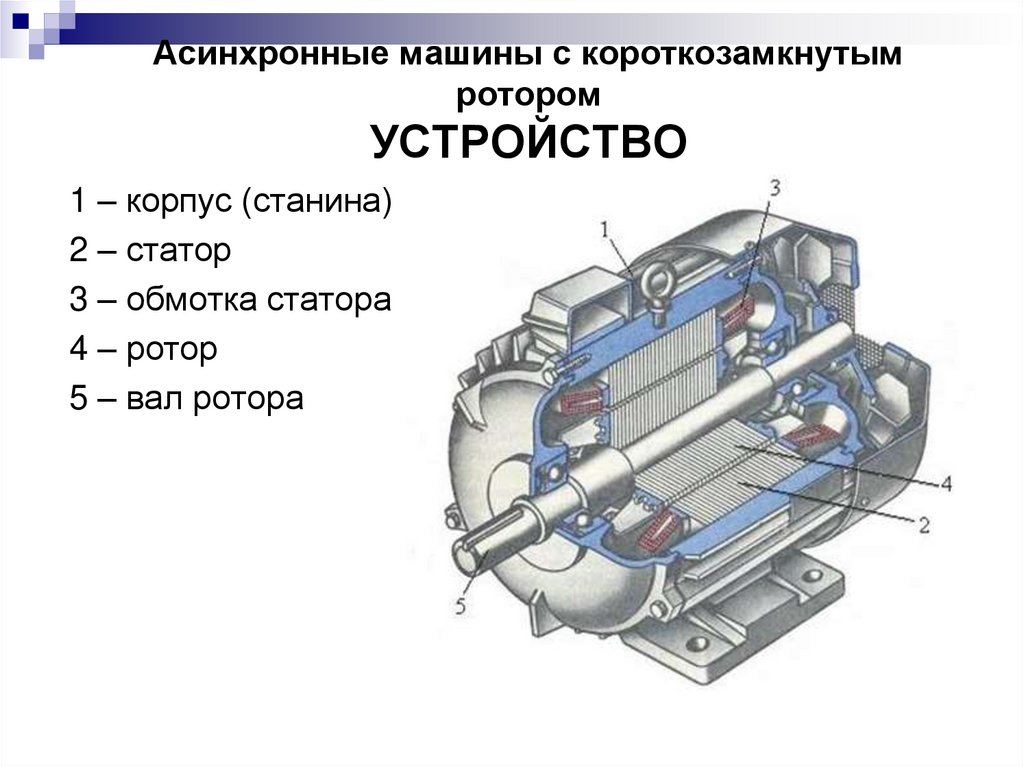
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор
— состоит из корпуса // и сердечника 10
с трехфазной обмоткой. Корпус двигателя
отливают из алюминиевого сплава или
из чугуна либо делают сварным.
Рассматриваемый двигатель имеет закрытое
обдуваемое исполнение. Поэтому поверхность
его корпуса имеет ряд продольных ребер,
назначение которых состоит в том, чтобы
увеличить поверхность охлаждения
двигателя.
Корпус двигателя
отливают из алюминиевого сплава или
из чугуна либо делают сварным.
Рассматриваемый двигатель имеет закрытое
обдуваемое исполнение. Поэтому поверхность
его корпуса имеет ряд продольных ребер,
назначение которых состоит в том, чтобы
увеличить поверхность охлаждения
двигателя.
В корпусе расположен сердечник статора
10, имеющий шихтованную конструкцию:
отштампованные листы из тонколистовой
электротехнической стали толщиной
обычно 0,5 мм покрыты слоем изоляционного
лака, собраны в пакет и скреплены
специальными скобами или продольными
сварными швами по наружной поверхности
пакета. Такая конструкция Сердечника
способствует значительному уменьшению
вихревых токов, возникающих в процессе
перемагничивания сердечника вращающимся
магнитным полем. На внутренней поверхности
сердечника статора имеются продольные
пазы, в которых расположены пазовые
части обмотки статора, соединенные
в определенном порядке лобовыми частями,
находящимися за пределами сердечника
по его торцовым сторонам.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
Принцип образования вращающегося
магнитного поля рассмотрим на примере
простейшей трехфазной двухполюсной
обмотки, каждая фаза которой состоит
из одной секции, фазы обмотки соединены
звездой (рис.5.5). При этом секции тока в
фазных обмотках (по времени) относительно
друг друга на электрический угол 120°
(рис. 5.5, б). Проведем ряд построений
вектора МДС трехфазной обмотки Fm,
соответствующих различным моментам
времениt0, t1,
t2,t3отмеченным на графике рис.5.5, б.
5.5, б). Проведем ряд построений
вектора МДС трехфазной обмотки Fm,
соответствующих различным моментам
времениt0, t1,
t2,t3отмеченным на графике рис.5.5, б.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление
тока от начала обмотки к ее концу и
обозначается х, а, следовательно,
отрицательное направление тока в обмотке
соответствует направлению тока от конца
к началу и обозначается •.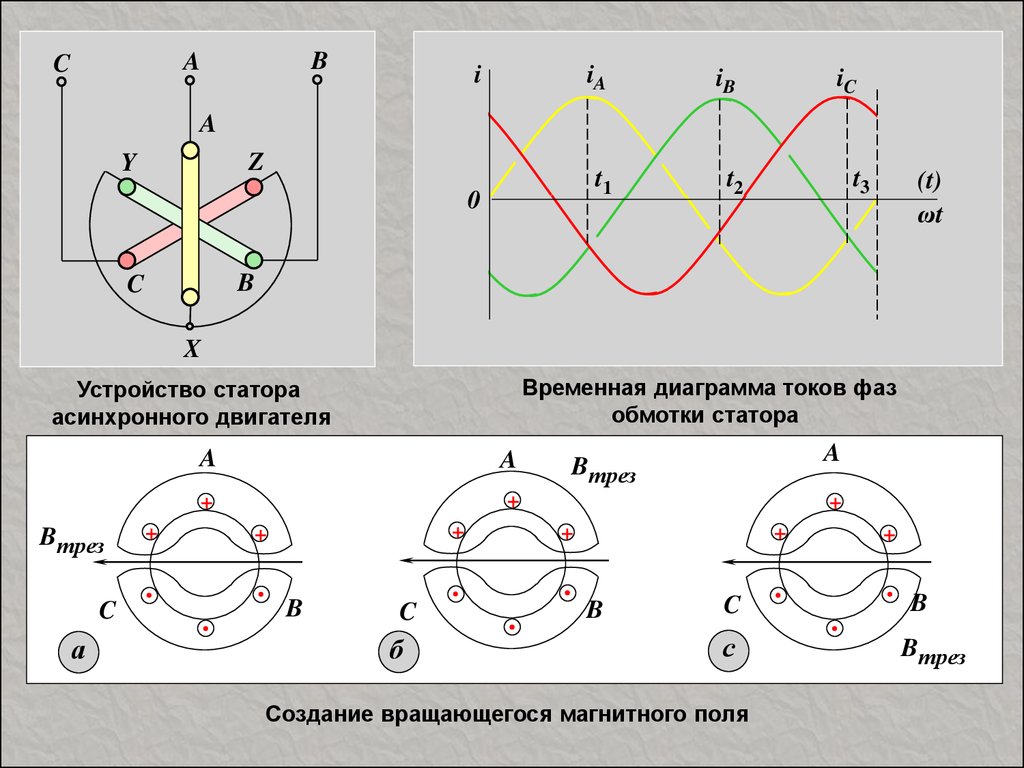 Затем в
соответствии с указанными на рис. 5, б
направлениями токов определяем (по
правилу буравчика) направление вектора
МДС трехфазной обмотки статора (вектор
Fmнаправлен вниз).
Затем в
соответствии с указанными на рис. 5, б
направлениями токов определяем (по
правилу буравчика) направление вектора
МДС трехфазной обмотки статора (вектор
Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора
МДС обмотки статора для момента t2и t3, видим, что каждый раз при
переходе от одного момента времени к
другому вектор Fmповорачивается на 120°, а за один период
изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и
будет, таким образом, вращающимся.
Вращающаяся МДС создает вращающееся
магнитное поле, эквивалентное полю
магнита N — S с индукцией Во (рис. 5, в).
Это поле вращается с синхронной частотойn0которая
пропорциональна частоте переменного
токаfи обратно
пропорциональна числу пар полюсов
обмоток статора р, т.е.
5, в).
Это поле вращается с синхронной частотойn0которая
пропорциональна частоте переменного
токаfи обратно
пропорциональна числу пар полюсов
обмоток статора р, т.е.
,
Зависимость n0 от р и f представлена в табл.5.2.
Таблица 5.2
|
f = 50 Гц |
Р |
1 |
2 |
3 |
4 |
5 |
6 |
|
n0, об/мин |
3000 |
1500 |
1000 |
750 |
600 |
500 | |
|
р=1 |
f. |
50 |
100 |
200 |
400 |
500 |
1000 |
 ГЦ
ГЦКруговое вращающееся магнитное поле характеризуется тем, что пространственный вектор магнитной индукции этого поля Во вращается равномерно (n0= const).
При необходимости изменить направление вращения магнитного поля статора нужно поменять порядок следования токов в фазных обмотках статора, для чего переключают фазы на зажимах двигателя (рис.5.6).
Рис.5.6. Изменение направления вращения магнитного поля.
Асинхронный двигатель или асинхронный двигатель, как это работает?
Асинхронный двигатель представляет собой электродвигатель, работающий от переменного тока, в котором скорость вращения ротора отличается от скорости магнитного поля статора. Этот тип двигателя также известен как асинхронный двигатель.
Этот тип двигателя также известен как асинхронный двигатель.
Асинхронный двигатель состоит из ротора и статора, в которых расположены катушки индуктивности. Катушки индуктивности трехфазные и сдвинуты по фазе на 120º относительно друг друга.
Асинхронный двигатель основан на токах, индуцируемых в роторе магнитным полем статора; вот почему это называется индукционной машиной.
Чтобы индуцировать электрический ток в роторе, необходимо, чтобы ротор подвергался изменению магнитного потока, создаваемого статором на частоте питания, или синхронизму. Следовательно, ротор размагничивается, когда он достигает синхронизма, поскольку он не видит изменения магнитного потока.
По этой причине ротор вращается с другой скоростью, чем поле статора, и поэтому вращается асинхронно. В этих двигателях вращающееся магнитное поле имеет синхронную скорость, соответствующую частоте питающей линии.
Важной характеристикой асинхронного или асинхронного двигателя является то, что скорость вращения ротора и, следовательно, мощность нельзя изменять постепенно.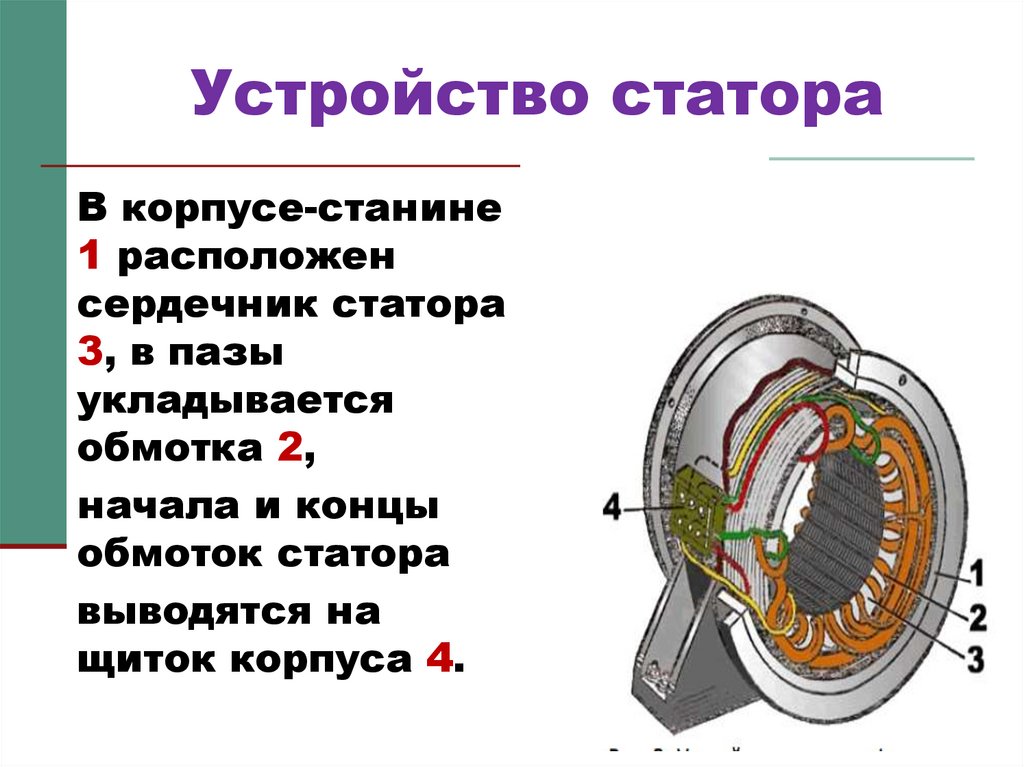 Рабочая скорость асинхронных двигателей зависит от частоты питания и количества полюсов.
Рабочая скорость асинхронных двигателей зависит от частоты питания и количества полюсов.
Почему асинхронные двигатели наиболее широко используются в промышленности?
Асинхронные двигатели являются наиболее широко используемыми двигателями в промышленности из-за их надежности и цены, особенно трехфазный асинхронный двигатель. Этот успех в основном объясняется следующими причинами:
- По сравнению с другими электродвигателями той же мощности его стоимость ниже.
- Это очень простые двигатели с очень простым обслуживанием.
- Асинхронный двигатель имеет лучшую производительность по сравнению с однофазным двигателем. По этой причине однофазный двигатель относят к приборам малой мощности и бытовой технике.
Асинхронные двигатели также широко используются в конструкции электромобилей.
Как работает асинхронный двигатель?
Катушка статора питается переменным током. Благодаря расположению пар полюсов, противофазных друг другу, ток создает общее магнитное поле, которое вращается в пространстве с той же частотой, что и питающий ток.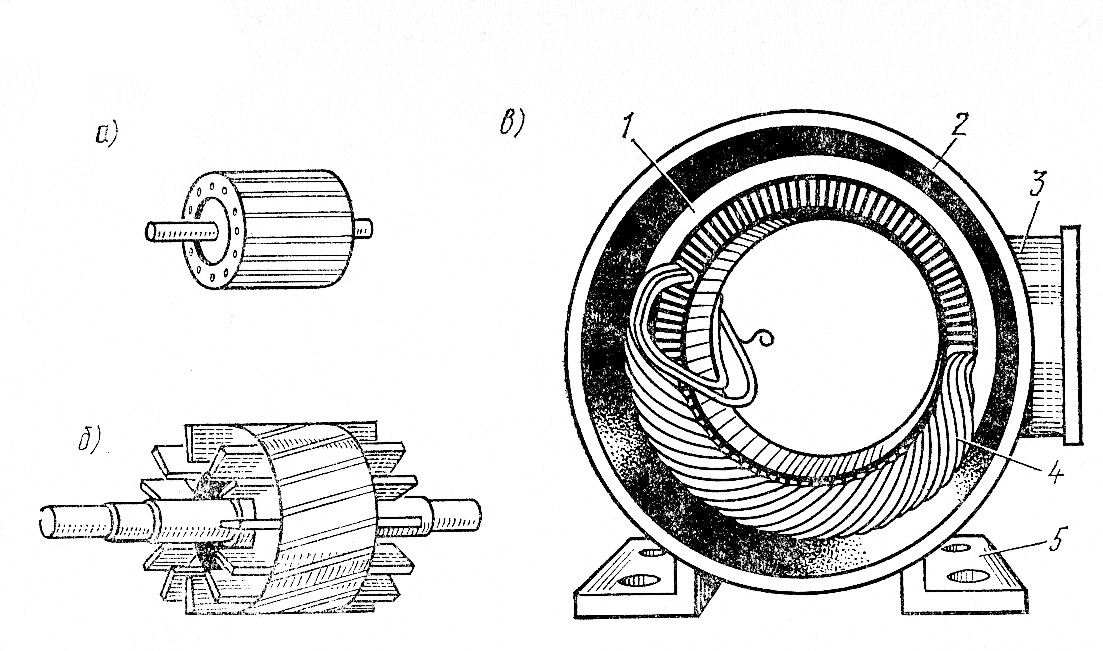 Это магнитное поле называется полем статора или вращающимся полем.
Это магнитное поле называется полем статора или вращающимся полем.
Обмотка ротора погружена в это вращающееся магнитное поле. Поскольку ротор вращается медленнее, чем поле статора, магнитный поток, создаваемый обмоткой ротора, изменяется; следовательно, вращающееся магнитное поле индуцирует токи в роторе за счет магнитной индукции (закон Фарадея).
Эти индуцированные токи, в свою очередь, генерируют магнитное поле ротора, которое противодействует изменениям потока. Магнитное поле ротора взаимодействует с полем статора, создавая крутящий момент в обмотке ротора, который заставляет ротор вращаться. Вращение ротора обеспечивает механическую энергию, которой мы можем воспользоваться.
На самом деле, согласно закону Ленца, наведенное магнитное поле в роторе всегда имеет противоположное направление по отношению к статору.
Индукция в роторе может возникнуть только в том случае, если относительные скорости полей статора и ротора различны. По этой причине ротор всегда вращается со скоростью меньшей, чем у вращающегося поля.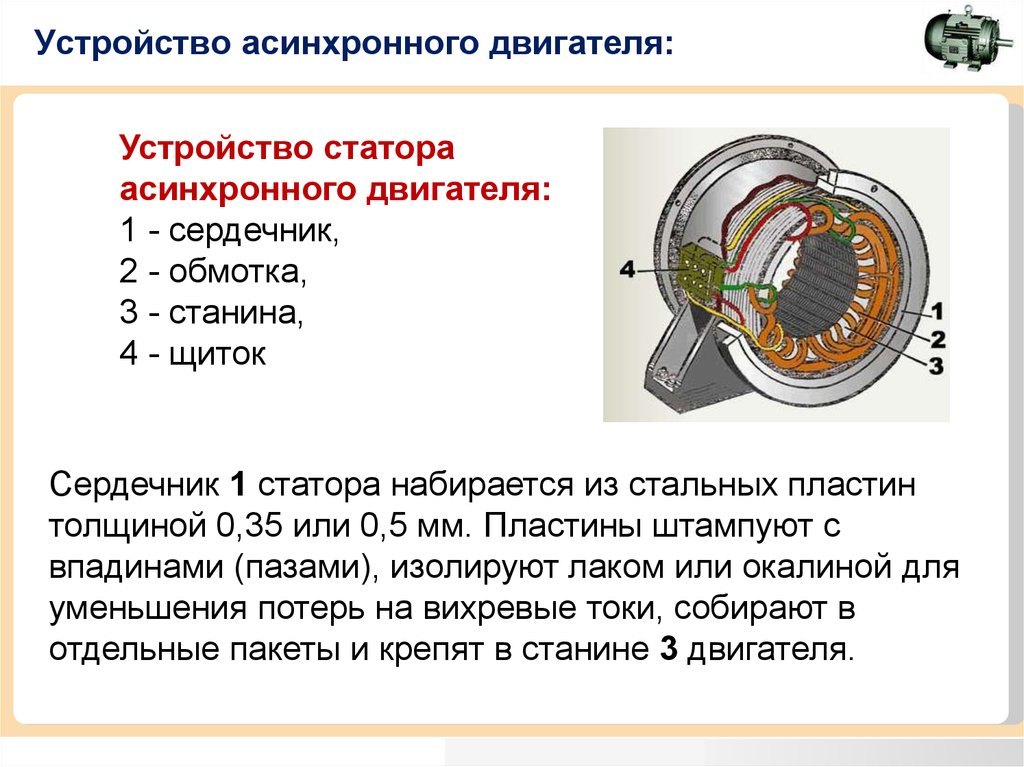
Типы асинхронных двигателей
Классификация асинхронных двигателей различных типов зависит от используемого напряжения переменного тока:
- Трехфазный асинхронный двигатель. Этот тип двигателя использует трехфазный ток 400 вольт.
- Однофазный асинхронный двигатель. Этот тип двигателя использует одиночный ток 230 вольт.
Трехфазные двигатели
Трехфазный двигатель — это двигатель надежного типа, для которого не требуется коммутатор. Большинство трехфазных асинхронных двигателей имеют сбалансированную нагрузку. Это двигатели, потребляющие одинаково во всех трех фазах, независимо от того, соединены они звездой или треугольником.
Для трехфазного асинхронного двигателя его можно запустить разными способами: звезда-треугольник, с преобразователем частоты, резисторами статора или резисторами ротора.
Напряжения в каждой фазе в этом случае равны результату деления линейного напряжения на корень из трех. Например, если линейное напряжение 400 вольт, то напряжение каждой фазы 230 вольт.
Двигатель с короткозамкнутым ротором
Двигатель с короткозамкнутым ротором — это тип асинхронного двигателя, в котором используется ротор, называемый ротором с короткозамкнутым ротором. Этот тип ротора состоит из ряда стержней, расположенных в канавках кольца ротора, соединенных на концах с двумя кольцами. Пусковой момент мал, а ток, который они поглощают, высок.
Подавляющее большинство асинхронных двигателей представляют собой двигатели с короткозамкнутым ротором.
Двигатель с фазным ротором
Двигатель с фазным ротором представляет собой тип электродвигателя переменного тока. В этом типе двигателя кольцевые канавки ротора вставлены в обмотки, соединенные общей точкой. Этот тип двигателя имеет медные кольца, называемые контактными кольцами, которые вращаются вместе с валом, соприкасающимся между собой и некоторыми щетками, которые позволяют соединить обмотки ротора с внешней стороной.
Преимущество фазного ротора заключается в том, что они позволяют плавный пуск с помощью резисторов ротора.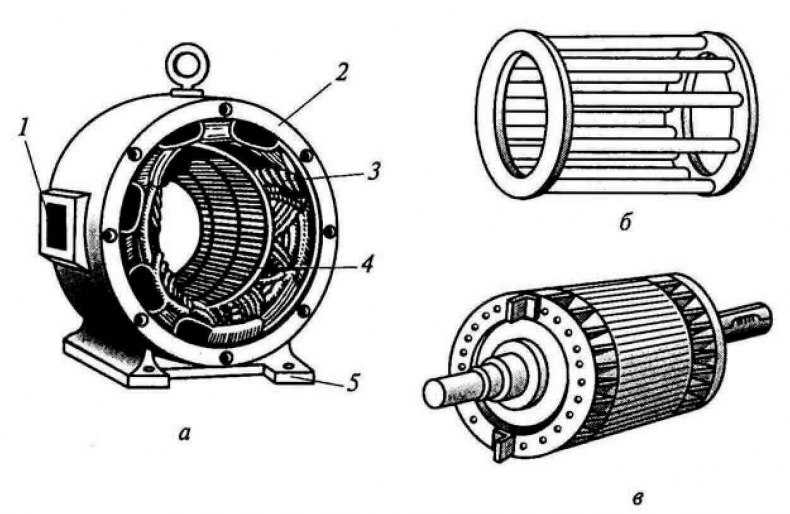 Однако в настоящее время с применением электронных стартеров и вариаторов в них нет необходимости и их производство весьма ограничено.
Однако в настоящее время с применением электронных стартеров и вариаторов в них нет необходимости и их производство весьма ограничено.
Неисправности и диагностика асинхронных двигателей — Управление активами
Асинхронные двигатели являются наиболее распространенным типом используемых двигателей. Они известны своими преимуществами, такими как низкая закупочная цена, высокая эффективность, простота регулирования и простая, но прочная конструкция.
Несмотря на высокую надежность, асинхронные двигатели имеют некоторые неисправности деталей машин. Мы можем разделить отказы в асинхронном двигателе на отказы механического и электрического происхождения, а также на отказы статора, ротора и подшипников.
Неисправности статора
Неисправности обмотки статора являются основной проблемой статоров. Наиболее частым источником неисправностей из-за обмотки является нарушение изоляции. Термический стресс оказывает наибольшее влияние на срок службы и качество изоляции. Другим нежелательным эффектом является электрическое напряжение переходного напряжения. В случае все более частого использования инверторов для плавного пуска на выходе инвертора модулируются прямоугольные импульсы напряжения.
Другим нежелательным эффектом является электрическое напряжение переходного напряжения. В случае все более частого использования инверторов для плавного пуска на выходе инвертора модулируются прямоугольные импульсы напряжения.
Неисправности ротора
Ротор асинхронного двигателя состоит из вала, напрессованных на вал изолированных листов, образующих магнитопровод ротора и обмотки. В основном обмотка ротора состоит из клеточной конструкции, которая образована стержнями, соединенными на концах.
Эксцентриситет ротора (неравномерность расстояния между ротором и статором) является наиболее распространенной неисправностью, за которой следует обрыв стержней ротора. Причиной этих неисправностей может быть использование некачественных материалов, перегрузка или тяжелый пуск. В случае стержней ротора неисправность может увеличить сопротивление стержня или полностью разорвать электрическую цепь стержня. Отказы стержней ротора приводят в основном к ухудшению запуска двигателя и возникновению паразитных моментов. Также сломанный стержень вызывает дополнительные неисправности в других стержнях, потому что ток в них больше из-за отсутствия на стержне (сломанном) пути тока.
Также сломанный стержень вызывает дополнительные неисправности в других стержнях, потому что ток в них больше из-за отсутствия на стержне (сломанном) пути тока.
Неисправности подшипников
Все детали подшипника подвержены износу. Причиной отказов подшипников можно считать механические напряжения при вращательном движении и подшипниковые токи. Механическое напряжение может быть вызвано плохой установкой, сборкой или эксплуатацией и обслуживанием. Подшипниковые токи могут быть вызваны индукцией (из-за асимметричной электрической цепи или источника питания) и частыми изменениями напряжения (из-за питания от полупроводниковых преобразователей).
Обнаружение неисправностей подшипников почти полностью покрывается анализом вибрации. Все механические (и некоторые электрические) неисправности имеют уникальную характеристику в спектре вибрации машины, и анализ вибрации может их распознать.
Электрические (и некоторые механические) неисправности двигателя имеют уникальную характеристику в частотном спектре тока двигателя. И метод MCSA может их распознать. Аббревиатура MCSA означает: Анализ сигнатуры тока двигателя.
И метод MCSA может их распознать. Аббревиатура MCSA означает: Анализ сигнатуры тока двигателя.
В двигателях с неисправностями создаются избыточные боковые полосы, которые искажают частотный спектр. Каждая неисправность имеет свою специфическую сигнатуру. Отдельные дефекты можно отличить друг от друга по амплитудным полосам и частоте.
В основе этого метода лежит измерение хода статорного тока одной или нескольких фаз во временной области (с достаточным разрешением) и его последующий спектральный анализ.
Анализатор вибрации ADASH VA5Pro предлагает уникальную возможность анализа вибрации и тока в одном устройстве. Модуль MCSA позволяет вам анализировать текущую сигнатуру из спектра, основываясь на ваших знаниях и опыте. Или вы можете использовать функцию автоматического обнаружения. Это та же идея, что и в автоматическом инструменте идентификации источника неисправности ADASH (FASIT) для анализа вибрации. Устройство может автоматически распознавать основные причины отказов, такие как дисбаланс, люфт, несоосность и неисправности подшипников. Модуль MCSA устройства VA5Pro способен автоматически определять неисправности ротора и статора, эксцентриситет и качество электроэнергии.
Модуль MCSA устройства VA5Pro способен автоматически определять неисправности ротора и статора, эксцентриситет и качество электроэнергии.
До Adash
Основатели ADASH Адам Бойко и Радомир Сглунда впервые встретились в Физико-техническом испытательном институте в Остраве в конце 1980-х годов.
ИХ ПЕРВЫЕ РАБОТЫ были связаны с сейсмическими измерениями в угольных шахтах. Это был первый опыт использования виброанализатора, в сопроводительных письменных материалах которого говорилось об «анализе вращающихся машин».
Дальнейшее изучение этой темы привело к различным дополнительным работам, таким как модальный анализ, рабочие формы отклонения, балансировка на месте, анализ вибрации и т. д., в то время как все еще работая в качестве государственных служащих.
Радим Сглунда
Нажмите на изображение, чтобы увеличить
www.adash.com
[email protected]
Управление активами | 19.10.2020
Возникновение нежелательных выбросов является головной болью для обрабатывающей промышленности из-за потери сырья, рисков для безопасности и ущерба окружающей среде.
