Какие существуют основные виды электродвигателей. Чем отличаются двигатели постоянного и переменного тока. Как устроены и работают асинхронные и синхронные электродвигатели. Где применяются различные типы электромоторов.
Классификация электродвигателей по виду тока
Электродвигатели можно разделить на две большие группы по виду используемого тока:
- Двигатели постоянного тока
- Двигатели переменного тока
Двигатели постоянного тока имеют ряд преимуществ:
- Высокий пусковой момент
- Возможность плавного регулирования скорости в широком диапазоне
- Компактные размеры при той же мощности
Однако они сложнее по конструкции и дороже в производстве. Двигатели переменного тока более простые, надежные и дешевые, поэтому получили более широкое распространение.
Основные типы электродвигателей переменного тока
Среди двигателей переменного тока выделяют два основных типа:
- Асинхронные двигатели
- Синхронные двигатели
Чем отличаются эти два типа электродвигателей?

Асинхронные двигатели
В асинхронных двигателях частота вращения ротора не совпадает с частотой вращения магнитного поля статора. Основные особенности:
- Простая и надежная конструкция
- Низкая стоимость
- Высокий КПД (до 95%)
- Способность работать с большими перегрузками
Благодаря этим преимуществам асинхронные двигатели получили наиболее широкое применение в промышленности.
Синхронные двигатели
В синхронных двигателях частота вращения ротора в точности совпадает с частотой вращения магнитного поля статора. Их отличительные черты:
- Высокая точность поддержания скорости вращения
- Способность работать с опережающим коэффициентом мощности
- Высокий КПД при больших мощностях
- Сложность конструкции
- Необходимость в устройствах пуска и синхронизации
Синхронные двигатели применяются в основном в мощных приводах, где требуется точное поддержание скорости.
Конструкция и принцип действия асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть с обмотками
- Ротор — вращающаяся часть
Как работает асинхронный двигатель?

- Трехфазный переменный ток в обмотках статора создает вращающееся магнитное поле
- Это поле наводит ЭДС в обмотке ротора
- Взаимодействие магнитного поля статора и тока ротора создает вращающий момент
- Ротор начинает вращаться вслед за полем статора, но с некоторым отставанием (скольжением)
Частота вращения ротора всегда меньше частоты вращения магнитного поля. Отсюда и название «асинхронный».
Виды роторов асинхронных двигателей
Существует два основных типа роторов асинхронных двигателей:
Короткозамкнутый ротор
- Простая конструкция в виде «беличьей клетки»
- Высокая надежность
- Низкая стоимость
- Малый пусковой момент
Фазный ротор
Отличительные черты:
- Наличие обмотки, выведенной на контактные кольца
- Возможность регулирования пусковых характеристик
- Более сложная и дорогая конструкция
- Повышенный пусковой момент
Какой тип ротора выбрать? Короткозамкнутые двигатели проще и надежнее, поэтому применяются чаще. Фазные роторы используют там, где нужен высокий пусковой момент.

Области применения различных типов электродвигателей
Где применяются разные виды электродвигателей?
Асинхронные двигатели с короткозамкнутым ротором
- Насосы и вентиляторы
- Компрессоры
- Конвейеры
- Подъемно-транспортные механизмы
- Металлообрабатывающие станки
Асинхронные двигатели с фазным ротором
- Краны и лифты
- Прокатные станы
- Экскаваторы
- Тяговые двигатели электротранспорта
Синхронные двигатели
- Мощные насосы и компрессоры
- Прокатные станы
- Дробилки
- Мельницы
- Гребные электродвигатели судов
Двигатели постоянного тока
- Электротранспорт
- Станки с ЧПУ
- Роботы и манипуляторы
- Прецизионные приводы
Способы управления скоростью вращения электродвигателей
Как можно регулировать скорость вращения разных типов электродвигателей?
Асинхронные двигатели
- Изменение частоты питающего напряжения (частотное регулирование)
- Изменение числа пар полюсов
- Изменение скольжения (реостатное регулирование для двигателей с фазным ротором)
Синхронные двигатели
- Изменение частоты питающего напряжения
- Изменение тока возбуждения
Двигатели постоянного тока
- Изменение напряжения якоря
- Изменение тока возбуждения
- Импульсное регулирование
Наиболее распространенным в настоящее время является частотное регулирование асинхронных двигателей с помощью преобразователей частоты.

Сравнение характеристик основных типов электродвигателей
Как выбрать оптимальный тип электродвигателя для конкретного применения? Рассмотрим сравнительные характеристики:
| Характеристика | Асинхронный с КЗ ротором | Асинхронный с фазным ротором | Синхронный | Постоянного тока |
|---|---|---|---|---|
| Конструкция | Простая | Средняя | Сложная | Сложная |
| Стоимость | Низкая | Средняя | Высокая | Высокая |
| КПД | Средний | Средний | Высокий | Высокий |
| Пусковой момент | Низкий | Высокий | Низкий | Высокий |
| Регулирование скорости | Среднее | Хорошее | Среднее | Отличное |
Как видно из таблицы, каждый тип имеет свои преимущества и недостатки. Выбор зависит от конкретных требований применения.
Современные тенденции в области электродвигателей
Какие направления развития электродвигателей наблюдаются в последнее время?
- Повышение энергоэффективности
- Применение новых магнитных материалов
- Интеграция преобразователей частоты
- Развитие вентильных двигателей
- Создание специализированных двигателей для электротранспорта
- Миниатюризация двигателей для робототехники
Эти тенденции направлены на повышение эффективности, расширение функциональности и освоение новых областей применения электродвигателей.

Для чего нужен электродвигатель и чем они отличаются
Что из себя представляет электродвигатель
Говоря техническим языком, электродвигатель является элементом, который преобразует электричество в механическую энергию, что приводит в движение весь механизм. Поэтому двигатель и называют главным составляющим. Давайте же разберемся подробнее, для чего нужен электродвигатель, из чего он состоит и как работает.Первые модели были произведены еще в 19 ст. Но перед этим была четко сформулирована цель – получить механическую энергию для передвижения и других действий с помощью электричества.
Разберемся, из чего состоит электродвигатель. Главными элементами считаются статор – неподвижная часть (корпус) и ротор – подвижная часть механизма. Помимо этого, в состав двигателя входят еще десятки мелких деталей, таких как подшипники, обмотка из медной проволоки и так далее. На этой странице можно посмотреть все электрические характеристики электродвигателей.
Теперь давайте рассмотрим виды электрических двигателей. В основном они классифицируются по типу питания – это двигатели постоянного тока и переменного, и по принципу работы – синхронные и асинхронные. Двигатели постоянного тока так называются, так как работают от различных блоков питания, аккумуляторов и прочих батарей. Переменного, потому что соединяются напрямую с электрической сетью.
В основном они классифицируются по типу питания – это двигатели постоянного тока и переменного, и по принципу работы – синхронные и асинхронные. Двигатели постоянного тока так называются, так как работают от различных блоков питания, аккумуляторов и прочих батарей. Переменного, потому что соединяются напрямую с электрической сетью.
Синхронные механизмы имеют обмотки на роторе и подают на них напряжение для работы двигателя. Асинхронные – не имеют данных компонентов. Поэтому скорость вращения будет заметно медленнее, так отсутствует магнитное поле, созданного в статоре.
Как работает и что делает электродвигатель
Когда механизм соединяется с источником питания, на обмотке возникает магнитное поле, которое и вращает ротор в статоре. Это происходит по закону Ампера. Ведь создается отталкивающая сила, способная вращать вал и приводить в движение другие детали. Частота оборотов ротора напрямую зависит от частоты приходящего на витки электричества, а также от количества пар магнитных полюсов. Кстати, название данной разновидности пошло от того факта, что скорость вращения ротора различалась с частотой оборотов магнитного поля, то есть эти показатели были асинхронными.
Кстати, название данной разновидности пошло от того факта, что скорость вращения ротора различалась с частотой оборотов магнитного поля, то есть эти показатели были асинхронными.
Синхронные же двигатели немного отличаются строением ротора. В таком типе электродвигателей, ротор играет роль магнита, который и создает поле для вращения. Здесь магнитное поле статора и сам ротор вращаются с одинаковой частотой. Но есть один, очень значимый минус. Чтобы запустить синхронный электродвигатель, нужно воспользоваться помощью асинхронного. Ведь после простого подключения механизма к сети, ничего не произойдет.
К этому недостатку можно прибавить низкую скорость оборотов. К примеру, если взять асинхронный и синхронный двигатели и подключить их к источнику электричества одинакового напряжения, то первый тип будет вращаться заметно быстрее второго.
Где используют электродвигатели
Они имеют множество неоспоримых преимуществ и особенностей, что делают механизм уникальным и незаменимым. В современном мире данный тип двигателя широко используется практически во всех сферах жизнедеятельности человека. Приобрести электродвигатели можно в каталоге электродвигателей аир.
В современном мире данный тип двигателя широко используется практически во всех сферах жизнедеятельности человека. Приобрести электродвигатели можно в каталоге электродвигателей аир.
Применение электрических двигателей начинается от небольших игрушек, и заканчивается большими предприятиями и народными хозяйствами. С помощью этого механизма стало возможно поднимать и передвигать огромные предметы.
Если коротко резюмировать данную статью, то хочется еще раз подчеркнуть значимость таких двигателей в жизни человека. Без них, многие сферы просто не смогли бы нормально функционировать и развиваться. Поэтому нужно тщательно подходить к выбору электродвигателя, ведь его поломка чревата остановкой производства или другого важного процесса, что повлечет за собой материальные и нематериальные убытки. Быстро подобрать необходимый мотор помогут наши специалисты.
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| АИР56В2 | 0,25 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 |
| АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 0,91 | 4,7 | |
| АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,3 | 1,77 | 8,7 | |
| АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| АИР71В4 | 0,75 | 1390 | 73,0 |
Типы и виды электродвигателей — переменного и постоянного тока, коллекторные, асинхронные, прямого привода
Одним из основных стимулов к широкой электрификации, начавшейся в XX веке, стала возможность легкого преобразования энергии электрического тока в механическую — к тому времени уже был известен коллекторный электродвигатель, изобретенный Якоби еще в первой половине XIX века.
Изобретение асинхронного двигателя переменного тока стало еще большим шагом вперед.
Электромотор лишился механически трущихся и искрящих узлов (щеток и коллектора), превзойдя по бесшумности и ресурсу любой другой существовавший в то время тип привода.
Независимо от конструкции, любой электродвигатель устроен одинаково: внутри цилиндрической проточки в неподвижной обмотке (статоре) вращается ротор, в котором возбуждается магнитное поле, приводящее к отталкиванию его полюсов от статора.
Поддержание постоянного отталкивания требует:
- перекоммутации обмоток ротора, как это делается на коллекторных электродвигателях;
- создания вращающегося магнитного поля в самом статоре (классический пример – асинхронный трехфазный двигатель).
Достоинства электродвигателей переоценить трудно. Это:
- Крайняя простота.
- Электродвигатель состоит из минимального количества узлов, поэтому ломаться в нем практически нечему.
- Самостоятельный запуск.

- Электродвигателю не нужен пусковой импульс, он начинает вращаться сам при включении питания (исключение – однофазные электродвигатели с пусковой обмоткой, но они практически вышли из употребления). Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
- Отсутствие вибраций.
- Так как в электродвигателях энергия магнитного поля непосредственно преобразуется во вращение, при должной балансировке ротора они полностью бесшумны и не создают вибрации.
- Легкость управления оборотами и крутящим моментом.
- Несмотря на то, что на разных типах электродвигателей это достигается разными способами, управление ими в любом случае достаточно просто и надежно.
- Возможность реверса.
- На коллекторном двигателе достаточно поменять местами полюса якоря, на трехфазном электромоторе – изменить порядок включения фаз.
- Обратимость.
- Коллекторные электродвигатели при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Так как постоянный ток не способен создать изменяющееся магнитное поле, обеспечение непрерывного вращения ротора требует принудительной перекоммутации обмоток, или дискретного изменения направления магнитного поля.
Старейший из известных способов – это использование электромеханического коллектора. В этом случае якорь электродвигателя имеет несколько разнонаправленных обмоток, соединенных с находящимися в соответствующем положении относительно щеток ламелями коллектора.
В момент включения питания возникает импульс в обмотке, соединенной со щетками, после чего ротор проворачивается, и в том же месте относительно полюсов статора включается новая обмотка.
Так как намагниченность статора во время работы коллекторного электродвигателя постоянного тока не изменяется, вместо сердечника с обмотками могут использоваться мощные постоянные магниты, что сделает мотор компактнее и легче.
Коллекторный двигатель не лишен ряда недостатков. Это:
- высокий уровень помех, как передаваемых в питающую сеть при переключении обмоток якоря, так и возбуждаемых искрением щеток;
- неизбежный износ коллектора и щеток;
- повышенная шумность при работе.
Современная силовая электроника позволила избавиться от этих недостатков, применяя так называемый шаговый двигатель – в нем ротор имеет постоянную намагниченность, а внешнее устройство последовательно меняет направление тока в нескольких обмотках статора.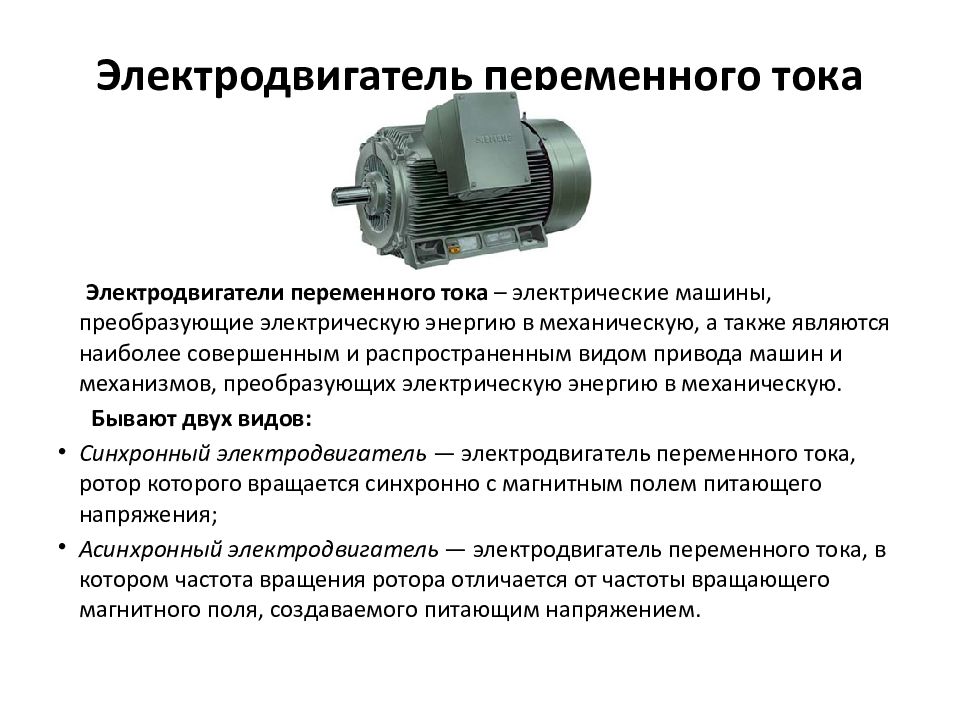
Фактически за единичный импульс тока ротор проворачивается на фиксированный угол (шаг), откуда и пошло название электромоторов такого типа.
Шаговые электродвигатели бесшумны, а также позволяют в широчайших пределах регулировать как крутящий момент (амплитудой импульсов), так и обороты (частотой), а также легко реверсируются изменением порядка следования сигналов.
По этой причине они широко используются в сервоприводах и автоматике, однако их максимальная мощность определяется возможностями силовой управляющей схемы, без которой шаговые двигатели неработоспособны.
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Электродвигатель работает на основе принципа электромагнитной индукции.
Двигатели разделяются на:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока
Различают следующие виды электродвигателей:
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей. Чем больше габарит двигателя – тем меньше производителей на рынке.
Чем больше габарит двигателя – тем меньше производителей на рынке.
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |

3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Электродвигатели, преобразование энергии – РегионПривод
Электродвигатель – это механизм, который служит для преобразования электрической энергии в механическую. В основе принципа работы любого электродвигателя находится закон электромагнитной индукции. Обычно электродвигатель состоит из неподвижной части (статора) и ротора (или якоря), в которых создаются неподвижные или вращающиеся магнитные поля. Электродвигатели бывают самых различных типов и модификаций, широко применяются во многих отраслях человеческой деятельности, и представляют собой один из главных компонентов в механизмах и приводах самого различного назначения. ОТ характеристик электродвигателя напрямую зависит эффективность производства.
Классификация электродвигателей
Главными частями, из которых состоит Электродвигатели, являются статор и ротор. Ротор — та часть двигателя, которая вращается, а статор – которая остается неподвижной. Принцип работы электродвигателя заключен во взаимодействии вращающегося магнитного поля, создаваемого обмоткой статора и электрического тока, который находится в замкнутой обмотке ротора. Этот процесс инициирует вращение ротора в направлении поля.
Принцип работы электродвигателя заключен во взаимодействии вращающегося магнитного поля, создаваемого обмоткой статора и электрического тока, который находится в замкнутой обмотке ротора. Этот процесс инициирует вращение ротора в направлении поля.
Основные виды электродвигателей:
- Двигатель переменного тока;
- Двигатель постоянного тока;
- Многофазный двигатель;
- Однофазный двигатель;
- Вентильный двигатель;
- Шаговый двигатель;
- Универсальный коллекторный двигатель.
Если говорить о таких электродвигателях как асинхронные электродвигатели, то они относятся к виду двигателей переменного тока. Такие двигатели бывают как однофазные электродвигатели, так и двух- и трехфазные. В асинхронных электродвигателях частота переменного тока в обмотке не совпадает с частотой вращения ротора. Процесс работы асинхронного электродвигателя обеспечивается разницей во времени генерации магнитных полей статора и ротора. Вращение ротора из-за этого задерживается относительно поля статора. Купить электродвигатель асинхронного типа можно для машин, в которых не требуются особые условия работы пускового механизма.
Процесс работы асинхронного электродвигателя обеспечивается разницей во времени генерации магнитных полей статора и ротора. Вращение ротора из-за этого задерживается относительно поля статора. Купить электродвигатель асинхронного типа можно для машин, в которых не требуются особые условия работы пускового механизма.
Виды электродвигателей по степени защищенности от внешней среды:
- Взрывозащищенные;
- Защищенные;
- Закрытые.
Взрывозащищенные электродвигатели имеют прочный корпус, который если случится взрыв двигатели, предотвратит поражение всех других частей механизма и воспрепятствует возникновению пожара.
Защищенные электродвигатели при эксплуатации закрыты специальными заслонками и сетками, которые защищают механизм от попадания инородных предметов. Используются в среде, где нет повышенной влажности воздуха и примесей газов, пыли, дыма и химических веществ.
Закрытые электродвигатели имеют специальную оболочку, которая не дает проникать пыли, газам, влаге и другим веществам и элементам, которые способны причинить вред механизму двигателя. Такие электродвигатели бывают герметичными и негерметичными.
Электродвигатели siemens и электродвигатели able выпускаются в большинстве вышеперечисленных видов электродвигателей, и среди них довольно просто выбрать самый оптимальный вариант.
Электродвигатели с тормозом
Тормозные электродвигатели обычно устанавливаются на таком оборудовании, которому необходимо иметь возможность осуществить мгновенную остановку. Это может быть конвейерное или станочное оборудование, или другое оборудование, где остановка обусловлена требованиями техники безопасности. Они активно применяются в транспортных лифтах, подъемных кранах, складских укладочных машинах, прокатном и швейном оборудовании, эскалаторах, станках для дерева и металла, задвижках, прокатном оборудовании – одним словом везде, где необходима быстрая остановка системы в определенном положении и в определенное время.
Если не вдаваться в подробности, электродвигатель с тормозом представляет собой обычный промышленный асинхронный электродвигатель, в котором установлен электромагнитная тормозная система. Это обуславливает тот факт, что от обычных двигателей электродвигатель с тормозом отличается только длиной, тогда как все посадочные и соединительные элементы остаются на прежнем месте. Длина изменяется из-за необходимости установки на двигатель специального кожуха. Как и обычные двигатели, в зависимости от типа питания, электродвигатели с тормозом делятся на двигатели, питаемые переменным током, и электродвигатели, питаемые постоянным током.
Главными элементами тормозной системы электродвигателя являются:
- Электромагнит, состоящий из корпуса, в котором находятся катушка или набор катушек;
- Якорь, представляющий собой исполнительный элемент, или поверхность для тормозного диска;
- Сам тормозной диск, который перемещается по зубчатой втулке, закрепленной на валу заторможенного привода или двигателя.

Когда двигатель находится в состоянии покоя, он заторможен. Пружинный нажим на якорь оказывает, в свою очередь, давление на тормозной диск, в связи с чем возникает его блокировка. Когда на катушку электромагнита подается электрический ток, возбужденный электромагнит притягивает к себе якорь, и происходит разблокировка тормоза. Нажим якоря снимается, и возникает свободное вращение вала электрического двигателя. Электродвигатели с тормозом маркируются буквой «Е», или «Е2» (для двигателей с ручной системой торможения).
Регулирование скорости вращения электродвигателя
Вопрос регулирования скорости вращения электродвигателя очень актуален, ведь снижение и повышение оборотов электродвигателя может понадобится в самых разнообразных механизмах, от бытовых приборов, таких как швейных машин или кухонной техники, до промышленных механизмов и станкового оборудования. Казалось бы, самый простой способ – просто понизить питающее напряжение электродвигателя. Это подходит для двигателей постоянного тока, регуляторы напряжения постоянного тока достаточно просты в производстве и доступны. Однако, в настоящее время основная масса приборов, механизмов и инструментов, занятых в производстве, базируются на асинхронных двигателях переменного тока. В этом случае при понижении напряжения электродвигатель резко снижает количество оборотов, теряет мощность и полностью останавливается. Как понизить обороты электродвигателя, или как увеличить их? Для регулировки скорости вращения таких электродвигателей и были разработаны частотные инверторные преобразователи, или как их чаще называют – частотники.
Это подходит для двигателей постоянного тока, регуляторы напряжения постоянного тока достаточно просты в производстве и доступны. Однако, в настоящее время основная масса приборов, механизмов и инструментов, занятых в производстве, базируются на асинхронных двигателях переменного тока. В этом случае при понижении напряжения электродвигатель резко снижает количество оборотов, теряет мощность и полностью останавливается. Как понизить обороты электродвигателя, или как увеличить их? Для регулировки скорости вращения таких электродвигателей и были разработаны частотные инверторные преобразователи, или как их чаще называют – частотники.
Область применения частотных преобразователей достаточно обширна. Они востребованы в станках и электроприводах промышленных механизмов, конвейерах, системах вытяжной вентиляции и так далее. Принцип работы частотника заключается в правиле вычисления угловой скорости вращения вала, которое включает в себя такой фактор как частота питающей сети. Таким образом, меняя частоту питания обмотки электродвигателя, можно регулировать скорость вращения ротора двигателя в прямой зависимости, таким образом уменьшить обороты электродвигателя или повысить их. Эти приборы имеют также название «инверторы», благодаря методу, при помощи которого решается задача одновременного регулирования частоты и напряжения на выходе преобразователя. Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
Таким образом, меняя частоту питания обмотки электродвигателя, можно регулировать скорость вращения ротора двигателя в прямой зависимости, таким образом уменьшить обороты электродвигателя или повысить их. Эти приборы имеют также название «инверторы», благодаря методу, при помощи которого решается задача одновременного регулирования частоты и напряжения на выходе преобразователя. Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
- Максимально возможная мощность электродвигателя;
- Напряжение запитывающей сети;
- Количество фаз (однофазный, трехфазный).
Большинство промышленных частотных преобразователей предназначены для работы в трехфазных сетях переменного тока, однако встречаются и другие модели, например частотники для однофазных двигателей.
Применение электродвигателя
Жизнь современного человека тяжело представить без такого механизма как электродвигатель. Оглянитесь вокруг – они получил практически повсеместное распространение. Сегодня они используются не только во всех отраслях промышленности, но и в транспорте, предметах и устройствах, окружающих в повседневной жизни, на работе и дома. Фены, вентиляторы, швейные машины, строительные инструменты – вот далеко не полный перечень устройств, где используются электродвигатели.
Оглянитесь вокруг – они получил практически повсеместное распространение. Сегодня они используются не только во всех отраслях промышленности, но и в транспорте, предметах и устройствах, окружающих в повседневной жизни, на работе и дома. Фены, вентиляторы, швейные машины, строительные инструменты – вот далеко не полный перечень устройств, где используются электродвигатели.
Особой надежностью отличаются именно асинхронные электродвигатели, благодаря чему они находят широкое применение в приводах металлообрабатывающих, деревообрабатывающих станков и других промышленных станков, в кузнечных прессах, грузоподъёмных машинах, лифтах, ткацких, швейных и землеройных машинах, промышленных вентиляторах, компрессорах, насосах, центрифугах, бетономешалках. Крановые электродвигатели используются в капитальном, промышленном и гражданском строительстве, в горнодобывающей, металлургической отраслях, энергетике, транспорте.
Метро, трамвай, троллейбус – все эти виды транспорта обязаны своему существованию электродвигателю. Любой офис или жилой дом сегодня невозможно представить без кондиционера или системы очистки воздуха – в них тоже применяются электродвигатели. Функционирование большинства современного оборудования невозможно без электродвигателя, в связи с чем очень многое зависит от качества и надежности этого механизма. Его поломка может привести к очень печальным результатам, вплоть до остановки производства и огромным финансовым убыткам. Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Любой офис или жилой дом сегодня невозможно представить без кондиционера или системы очистки воздуха – в них тоже применяются электродвигатели. Функционирование большинства современного оборудования невозможно без электродвигателя, в связи с чем очень многое зависит от качества и надежности этого механизма. Его поломка может привести к очень печальным результатам, вплоть до остановки производства и огромным финансовым убыткам. Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Принцип работы электродвигателя
Принцип работы электродвигателя заключается в эффекте магнетизма, который позволяет эффективно преобразовывать электрическую энергию в механическую. Принцип преобразования энергии в разных типах электродвигателей одинаковый, для всех типов электродвигателей, но конструкция двигателей и способы контроля скорости вращающегося момента могут различаться. Всем со школьной скамьи известен простейший пример электродвигателя – когда рамка вращается между полюсами постоянного магнита. Разумеется, устройство электродвигателя, который применяется в промышленных механизмах или бытовых приборах намного сложнее. Давайте рассмотрим как работает асинхронный электродвигатель, который получил наибольшее распространение в промышленности.
Разумеется, устройство электродвигателя, который применяется в промышленных механизмах или бытовых приборах намного сложнее. Давайте рассмотрим как работает асинхронный электродвигатель, который получил наибольшее распространение в промышленности.
Принцип работы асинхронного электродвигателя.
Принцип действия асинхронного двигателя, как и прочих, основан на использовании вращающегося магнитного поля. Скорость вращения магнитного поля принято называть синхронной, так как она соответствует скорости вращения магнита. При этом скорость вращения цилиндра принято называть асинхронной, то есть не совпадающей со скоростью вращения магнита. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением. Чтобы заставить заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора обычно используется трехфазный ток.
Устройство электродвигателя
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя, размещаются три обмотки, сети трехфазного тока расположенные одна относительно другой под углом 120°. Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя. Если обмотки соединить между собой и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся. Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя. Если обмотки соединить между собой и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся. Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Обмотки статора могут быть соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником». Если поменять местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное. Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора. Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Подключение электродвигателя
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой. Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе. В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя, подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка. В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором. Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Расчёт мощности электродвигателя
Выбирая электродвигатель необходимо ориентироваться на потребляемую оборудованием мощность. Определить мощность можно расчетным путем, используя следующие формулы и коэффициенты:
Мощность на валу электродвигателя определяется по следующей формуле:
, где
Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов. При выборе электродвигателя запас должен быть небольшой мощности. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Расчет пускового тока электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток:
Номинальный ток трехфазных электродвигателей переменного тока:
, где
PH – номинальная мощность электродвигателя;
UH — номинальное напряжение электродвигателя,
ηH — КПД электродвигателя;
cosφH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя. Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей.
, где
IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Асинхронный двигатель | Строение и принцип работы
Асинхронный двигатель – электрическая машина, работающая в двигательном режиме, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит также от нагрузки. Основа работы электродвигателя – преобразование электрической энергии в механическую. Трехфазный асинхронный электродвигатель был разработан и впервые создан в 1889 году русским ученым-электротехником М. О. Доливо-Добровольским. Совместно с разработкой двигателя Михаил Осипович разработал и осуществил впервые в мире в 1891 году систему передачи трехфазного тока на расстояние.
О. Доливо-Добровольским. Совместно с разработкой двигателя Михаил Осипович разработал и осуществил впервые в мире в 1891 году систему передачи трехфазного тока на расстояние.
Строение асинхронного двигателя
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.
- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три “куска” медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.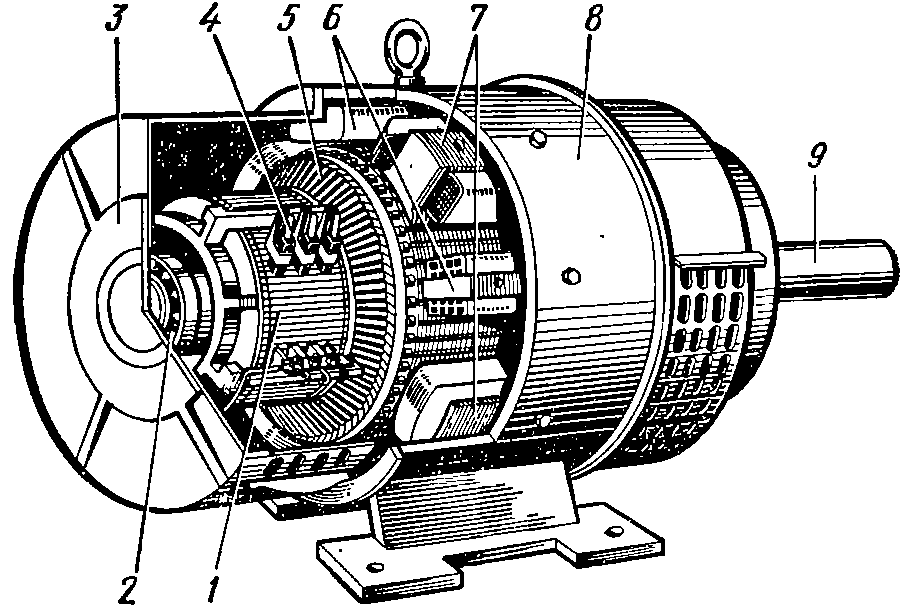
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
Самая главная часть – это вал. Иначе, как бы происходило вращение?
На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.
Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
Однофазные электродвигатели. Виды, принцип действия, схемы включения однофазных электродвигателей.
Однофазные электродвигатели
Зачастую основное внимание уделяется изучению трёхфазных электродвигателей, частично в связи с тем, что трёхфазные электродвигатели применяются чаще, чем однофазные. Однофазные электродвигатели имеют тот же принцип действия, что и трёхфазные электродвигатели, только с более низкими пусковыми моментами. Они подразделяются по типам в зависимости от способа пуска.
Они подразделяются по типам в зависимости от способа пуска.
Стандартный однофазный статор имеет две обмотки, расположенные под углом 90° по отношению друг к другу. Одна из них считается главной обмоткой, другая — вспомогательной, или пусковой. В соответствии с количеством полюсов каждая обмотка может делиться не несколько секций.
На рисунке приведен пример двухполюсной однофазной обмотки с четырьмя секциями в главной обмотке и двумя секциями во вспомогательной.
Следует помнить, что использование однофазного электродвигателя — это всегда, своего рода, компромисс. Конструкция того или иного двигателя зависит, прежде всего, от поставленной задачи. Это значит, что все электродвигатели разрабатываются в соответствии с тем, что наиболее важно в каждом конкретном случае: например, КПД, вращающий момент, рабочий цикл и т.д. Из-за пульсирующего поля однофазные электродвигатели CSIR и RSIR могут иметь более высокий уровень шума по сравнению с двухфазными электродвигателями PSC и CSCR, которые работают намного тише, так как в них используется пусковой конденсатор. Конденсатор, через который производится пуск электродвигателя, способствует его плавной работе.
Конденсатор, через который производится пуск электродвигателя, способствует его плавной работе.
Основные типы однофазных индукционных электродвигателей
Бытовая техника и приборы низкой мощности работают от однофазного переменного тока, кроме того, не везде может быть обеспечено трёхфазное электропитание. Поэтому однофазные электродвигатели переменного тока получили широкое распространение, особенно в США. Очень часто электродвигателям переменного тока отдают предпочтение, так как их отличает прочная конструкция, низкая стоимость, к тому же они не требуют технического обслуживания.
Как видно из названия, однофазный индукционный электродвигатель работает по принципу индукции; тот же принцип действует и для трёхфазных электродвигателей. Однако между ними есть различия: однофазные электродвигатели, как правило, работают при переменном токе и напряжении 110 -240 В, поле статора этих двигателей не вращается. Вместо этого каждый раз при скачке синусоидального напряжения от отрицательного к положительному меняются полюса.
В однофазных электродвигателях поле статора постоянно выравнивается в одном направлении, а полюса меняют своё положение один раз в каждом цикле. Это означает, что однофазный индукционный электродвигатель не может быть пущен самостоятельно.
Теоретически, однофазный электродвигатель можно было бы запустить при помощи механического вращения двигателя с последующим немедленным подключением питания. Однако на практике пуск всех электродвигателей осуществляется автоматически.
Выделяют четыре основных типа электродвигателей:
• индукционный двигатель с пуском через конденсатор / работа через обмотку (индуктивность) (CSIR),
• индукционный двигатель с пуском через конденсатор/работа через конденсатор (CSCR),
• индукционный двигатель с реостатным пуском (RSIR) и
• двигатель с постоянным разделением емкости (PSC).
На приведённом ниже рисунке показаны типичные кривые соотношения вращающий момент/частота вращения для четырёх основных типов однофазных электродвигателей переменного тока.
Однофазный электродвигатель с пуском через конденсатор/работа через обмотку (CSIR)
Индукционные двигатели с пуском через конденсатор, которые также известны как электродвигатели CSIR, составляют самую большую группу однофазных электродвигателей.
Двигатели CSIR представлены несколькими типоразмерами: от самых маломощных до 1,1 кВт. В электродвигателях CSIR конденсатор последовательно соединён с пусковой обмоткой. Конденсатор вызывает некоторое отставание между током в пусковой обмотке и в главной обмотке.
Это способствует задержке намагничивания пусковой обмотки, что приводит к появлению вращающегося поля, которое влияет на возникновение вращающего момента. После того как электродвигатель наберёт скорость и приблизится к рабочей частоте вращения, открывается пускатель. Далее электродвигатель будет работать в обычном для индукционного электродвигателя режиме. Пускатель может быть центробежным или электронным.
Двигатели CSIR имеют относительно высокий пусковой момент, в диапазоне от 50 до 250 процентов от вращающего момента при полной нагрузке. Поэтому из всех однофазных электродвигателей эти двигатели лучше всего подходят для случаев, когда пусковые нагрузки велики, например для конвейеров, воздушных компрессоров и холодильных компрессоров.
Поэтому из всех однофазных электродвигателей эти двигатели лучше всего подходят для случаев, когда пусковые нагрузки велики, например для конвейеров, воздушных компрессоров и холодильных компрессоров.
Однофазный электродвигатель с пуском через конденсатор/ работа через конденсатор (CSCR)
Этот тип двигателей, которые коротко называются «электродвигатели CSCR», сочетает в себе лучшие свойства индукционного двигателя с пуском через конденсатор и двигателя с постоянно подключённым конденсатором. Несмотря на то, что из-за своей конструкции эти двигатели несколько дороже других однофазных электродвигателей, они остаются наилучшим вариантом для применения в сложных условиях. Пусковой конденсатор электродвигателя CSCR последовательно соединён с пусковой обмоткой, как и в электродвигателе с пуском через конденсатор. Это обеспечивает высокий пусковой момент.
Электродвигатели CSCR также имеют сходство с двигателями с постоянным разделением емкости (PSC), так как у них пуск тоже осуществляется через конденсатор, который последовательно соединён с пусковой обмоткой, если пусковой конденсатор отключен от сети. Это означает, что двигатель справляется с максимальной нагрузкой или перегрузкой.
Это означает, что двигатель справляется с максимальной нагрузкой или перегрузкой.
Электродвигатели CSCR могут использоваться для работы с низким током полной нагрузки и при более высоком КПД. Это даёт некоторые преимущества, в том числе обеспечивает работу двигателя с меньшими скачками температуры, в сравнении с другими подобными однофазными электродвигателями.
Электродвигатели CSCR — самые мощные однофазные электродвигатели, которые могут использоваться в сложных условиях, например, в насосах для перекачивания воды под высоким давлением и в вакуумных насосах, а также в других высокомоментных процессах. Выходная мощность таких электродвигателей лежит в диапазоне от 1,1 до 11 кВт.
Однофазный электродвигатель с пуском через сопротивление/работа через обмотку (индуктивность) (RSIR)
Данный тип двигателей ещё известен как «электродвигатели с расщеплённой фазой». Они, как правило, дешевле однофазных электродвигателей других типов, используемых в промышленности, но у них также есть некоторые ограничения по производительности.
Пусковое устройство электродвигателей RSIR включает в себя две отдельные обмотки статора. Одна из них используется исключительно для пуска, диаметр проволоки данной обмотки меньше, а электрическое сопротивление — выше, чем у главных обмоток. Это вызывает отставание вращающегося поля, что, в свою очередь, приводит в движение двигатель. Центробежный или электронный пускатель отсоединяет пусковую обмотку, когда частота вращения двигателя достигает, приблизительно, 75% от номинальной величины. После этого электродвигатель продолжит работу в соответствии со стандартными принципами действия индукционного электродвигателя.
Как уже говорилось раньше, для электродвигателей RSIR есть некоторые ограничения. У них низкие пусковые моменты, часто в диапазоне от 50 до 150 процентов от номинальной нагрузки. Кроме того, электродвигатель создаёт высокие пусковые токи, приблизительно от 700 до 1000% от номинального тока. В результате продолжительное время пуска будет вызывать перегрев и разрушение пусковой обмотки. Это означает, что электродвигатели данного типа нельзя использовать там, где необходимы большие пусковые моменты.
Это означает, что электродвигатели данного типа нельзя использовать там, где необходимы большие пусковые моменты.
Электродвигатели RSIR рассчитаны на узкий диапазон напряжения питания, что, естественно, ограничивает области их применения. Их максимальные вращающие моменты варьируются в пределах от 100 до 250% от расчетной величины. Необходимо также отметить, что дополнительной трудностью является установка тепловой защиты, так как довольно сложно найти защитное устройство, которое срабатывало бы достаточно быстро, чтобы не допустить прогорания пусковой обмотки. Электродвигатели RSIR подходят для использования в небольших приборах для рубки и перемалывания, вентиляторах, а также для применения в других областях, в которых допускается низкий пусковой момент и требуемая выходная мощность на валу от 0,06 кВт до 0,25 кВт. Они не используются там, где должны быть высокие вращающие моменты или продолжительные циклы.
Однофазный электродвигатель с постоянным разделение емкости (PSC)
Как видно из названия, двигатели с постоянным разделением емкости (PSC) оснащены конденсатором, который во время работы постоянно включен и последовательно соединён с пусковой обмоткой. Это значит, что эти двигатели не имеют пускателя или конденсатора, который используется только для пуска. Таким образом, пусковая обмотка становится вспомогательной обмоткой, когда электродвигатель достигает рабочей частоты вращения.
Это значит, что эти двигатели не имеют пускателя или конденсатора, который используется только для пуска. Таким образом, пусковая обмотка становится вспомогательной обмоткой, когда электродвигатель достигает рабочей частоты вращения.
Конструкция электродвигателей PSC такова, что они не могут обеспечить такой же пусковой момент, как электродвигатели с пусковыми конденсаторами. Их пусковые моменты достаточно низкие: 30-90% от номинальной нагрузки, поэтому они не используются в системах с большой пусковой нагрузкой. Это компенсируется за счёт низких пусковых токов — обычно меньше 200% от номинального тока нагрузки, — что делает их наиболее подходящими двигателями для областей применения с продолжительным рабочим циклом.
Двигатели с постоянным разделением емкости имеют ряд преимуществ. Рабочие параметры и частоту вращения таких двигателей можно подбирать в соответствии с поставленными задачами, к тому же они могут быть изготовлены для оптимального КПД и высокого коэффициента мощности при номинальной нагрузке. Так как они не требуют специального устройства пуска, их можно легко реверсировать (изменить направление вращения на обратное). В дополнение ко всему вышесказанному, они являются самыми надёжными из всех однофазных электродвигателей. Вот почему Grundfos использует однофазные электродвигатели PSC в стандартном исполнении для всех областей применения с мощностями до 2,2 кВт (2-полюсные) или 1,5 кВт (4-полюсные).
Так как они не требуют специального устройства пуска, их можно легко реверсировать (изменить направление вращения на обратное). В дополнение ко всему вышесказанному, они являются самыми надёжными из всех однофазных электродвигателей. Вот почему Grundfos использует однофазные электродвигатели PSC в стандартном исполнении для всех областей применения с мощностями до 2,2 кВт (2-полюсные) или 1,5 кВт (4-полюсные).
Двигатели с постоянным разделением емкости могут использоваться для выполнения целого ряда различных задач в зависимости от их конструкции. Типичным примером являются низкоинерционные нагрузки, например вентиляторы и насосы.
Двухпроводные однофазные электродвигатели
Двухпроводные однофазные электродвигатели имеют две главные обмотки, пусковую обмотку и рабочий конденсатор. Они широко используются в США с однофазными источниками питания: 1 ½ 115 В / 60 Гц или 1 ½ 230 В / 60 Гц. При правильном подключении данный тип электродвигателей можно использовать для обоих видов электропитания.
Ограничения однофазных электродвигателей
В отличие от трёхфазных для однофазных электродвигателей существуют некоторые ограничения. Однофазные электродвигатели ни в коем случае не должны работать в режиме холостого хода, так как при малых нагрузках они сильно нагреваются, также рекомендуется эксплуатировать двигатель при нагрузке меньшей 25% от полной нагрузки.
Электродвигатели PSC и CSCR имеют симметричное/ круговое вращающееся поле в одной точке приложения нагрузки; это значит, что во всех остальных точках приложения нагрузки вращающееся поле асимметричное/эллиптическое. Когда электродвигатель работает с асимметричным вращающимся полем, сила тока в одной или обеих обмотках может превышать силу тока в сети. Такие избыточные токи вызывают потери, в связи с этим одна или обе обмотки (что чаще происходит при полном отсутствии нагрузки) нагреваются, даже если ток в сети относительно небольшой. Смотрите примеры.
О напряжении в однофазных электродвигателях
Важно помнить о том, что напряжение на пусковой обмотке электродвигателя может быть выше сетевого напряжения питания электродвигателя. Это относится и к симметричному режиму работы. Смотрите пример.
Это относится и к симметричному режиму работы. Смотрите пример.
Изменение напряжения питания
Нужно отметить, что однофазные электродвигатели обычно не используются для больших интервалов напряжения, в отличие от трёхфазных электродвигателей. В связи с этим может возникнуть потребность в двигателях, которые могут работать с другими видами напряжения. Для этого необходимо внести некоторые конструкционные изменения, например, нужна дополнительная обмотка и конденсаторы различной ёмкости. Теоретически, ёмкость конденсатора для различного сетевого напряжения (с одной и той же частотой) должна быть равна квадрату отношения напряжений:
Таким образом, в электродвигателе, рассчитанном на питание от сети в 230 В, используется конденсатор 25µФ/400 В, для модели электродвигателя на 115 В необходим конденсатор ёмкостью 100µФ с маркировкой более низкого напряжения — например 200 В.
Иногда выбирают конденсаторы меньшей ёмкости, например 60µФ. Они дешевле и занимают меньше места. В таких случаях обмотка должна подходить для определённого конденсатора. Нужно учитывать, что производительность электродвигателя при этом будет меньше, чем с конденсатором ёмкостью 100µФ — например, пусковой момент будет ниже.
Они дешевле и занимают меньше места. В таких случаях обмотка должна подходить для определённого конденсатора. Нужно учитывать, что производительность электродвигателя при этом будет меньше, чем с конденсатором ёмкостью 100µФ — например, пусковой момент будет ниже.
Заключение
Однофазные электродвигатели работают по тому же принципу, что и трёхфазные. Однако у них более низкие пусковые моменты и значения напряжения питания (110-240В).
Однофазные электродвигатели не должны работать в режиме холостого хода, многие из них не должны эксплуатироваться при нагрузке меньше 25 % от максимальной, так как это вызывает повышение температуры внутри электродвигателя, что может привести к его поломке.
типов электродвигателей | Блог об управлении движением
Электродвигатели теперь более разнообразны и адаптируемы, чем когда-либо прежде. При планировании системы управления движением чрезвычайно важен выбор двигателя. Двигатель должен соответствовать назначению и общим рабочим характеристикам системы. К счастью, существует конструкция двигателя, подходящая для любых мыслимых целей.
К счастью, существует конструкция двигателя, подходящая для любых мыслимых целей.
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
Бесщеточные двигатели переменного тока
Бесщеточные двигатели переменного токаявляются одними из самых популярных в управлении движением.Они используют индукцию вращающегося магнитного поля, генерируемого в статоре, чтобы вращать как статор, так и ротор с синхронной скоростью. Они полагаются на постоянные электромагниты для работы.
Щеточные двигатели постоянного тока
В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток. В некоторых моделях решающее значение имеет ориентация щетки относительно сегментов стержня ротора. Коммутатор особенно важен в любой конструкции щеточного двигателя постоянного тока.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока были впервые разработаны для достижения более высоких характеристик в меньшем пространстве, чем щеточные двигатели постоянного тока, и они меньше, чем сопоставимые модели переменного тока. Встроенный контроллер используется для облегчения работы при отсутствии контактного кольца или коммутатора.
Встроенный контроллер используется для облегчения работы при отсутствии контактного кольца или коммутатора.
Прямой привод
Прямой привод — это высокоэффективная технология с низким уровнем износа, которая заменяет обычные серводвигатели и соответствующие трансмиссии. Эти двигатели не только намного легче обслуживать в течение длительного периода времени, но и ускоряются быстрее.
Линейные двигатели
Эти электродвигатели имеют раскрученный статор и двигатель, создающий линейную силу по длине устройства.В отличие от цилиндрических моделей, они имеют плоскую активную секцию с двумя торцами. Как правило, они быстрее и точнее вращающихся двигателей.
Серводвигатели
Серводвигатель — это любой двигатель, соединенный с датчиком обратной связи для облегчения позиционирования; Таким образом, серводвигатели являются основой робототехники. Используются как поворотные, так и линейные приводы. Недорогие щеточные двигатели постоянного тока широко распространены, но их заменяют бесщеточные двигатели переменного тока для высокопроизводительных приложений.
Шаговые двигатели
В шаговых двигателяхиспользуется внутренний ротор, управляемый электроникой с помощью внешних магнитов. Ротор может быть выполнен на постоянных магнитах или из мягкого металла. Когда обмотки находятся под напряжением, зубья ротора выравниваются по магнитному полю. Это позволяет им перемещаться от точки к точке с фиксированным шагом.
Перед тем, как начать работу над какой-либо новой системой, тщательно подумайте о конкурирующих свойствах различных двигателей. Выбор правильного двигателя позволяет лучше начать любой проект.
Готовы узнать больше? Ознакомьтесь с курсом «Основы проектирования электродвигателей», предлагаемым колледжем MCMA Motion & Motor College.
Присоединяйтесь к нам 11-13 октября на TechCon в Новом Орлеане. Нажмите сюда, чтобы узнать больше!
электромобилей и их различные типы
В связи с ростом загрязнения окружающей среды и цен на топливо, возникла острая необходимость перейти на более чистый вид транспорта. Это привело к тому, что автопроизводители начали инвестировать исследования и капитал в сегмент электромобилей.Но как именно работает электромобиль? Используются ли разные типы двигателей? Есть ли типы электромобилей? Если у вас есть эти вопросы, вы попали в нужное место. Расшифруем электрическую революцию.
Это привело к тому, что автопроизводители начали инвестировать исследования и капитал в сегмент электромобилей.Но как именно работает электромобиль? Используются ли разные типы двигателей? Есть ли типы электромобилей? Если у вас есть эти вопросы, вы попали в нужное место. Расшифруем электрическую революцию.
Как работает электромобиль?
Работа электромобиляЭлектромобиль работает по основному научному принципу: преобразованию энергии. Электрическая энергия преобразуется в механическую. В электрической системе используется двигатель, выполняющий эту функцию преобразования.Моторы бывают разных типов. Двигатель для электромобиля — это то же самое, что двигатель для автомобиля IC. Давайте посмотрим на различные типы двигателей, используемых в электромобилях.
Типы электродвигателей
В настоящее время в электромобилях используются различные типы двигателей:
Двигатель серии постоянного тока
Это был широко используемый мотор еще в 1990-х годах.
 Этот двигатель способен создавать высокий начальный крутящий момент. Легкое регулирование скорости и резкое увеличение несущей способности делают эти двигатели хорошим выбором.Но серьезным недостатком двигателей постоянного тока, также известных как щеточные двигатели постоянного тока, является необходимость в высоком техническом обслуживании щеток и коммутаторов. Эти двигатели до сих пор используются индийскими железными дорогами.
Этот двигатель способен создавать высокий начальный крутящий момент. Легкое регулирование скорости и резкое увеличение несущей способности делают эти двигатели хорошим выбором.Но серьезным недостатком двигателей постоянного тока, также известных как щеточные двигатели постоянного тока, является необходимость в высоком техническом обслуживании щеток и коммутаторов. Эти двигатели до сих пор используются индийскими железными дорогами.Бесщеточный двигатель постоянного тока (BLDC)
BLDC, используемый в Aether ScootersЭти двигатели представляют собой технически усовершенствованные версии двигателей серии DC. Они не используют щетки и коммутаторы. Вместо этого используются постоянные магниты. BLDC имеют высокий пусковой момент, высокую эффективность и низкие эксплуатационные расходы.В наши дни BLDC широко используются либо в качестве ступичного двигателя, либо с ременным приводом.
Синхронный двигатель с постоянными магнитами (PMSM)
PMSM в Toyota PriusОн очень похож по конструкции на BLDC.
 Но главное отличие заключается в обратной ЭДС. PMSM имеет синусоидальную обратную ЭДС, а BLDC — трапециевидную. Они обладают высокой мощностью и могут использоваться в высокопроизводительных приложениях, таких как спортивные автомобили, автобусы и т. Д. Nissan Leaf использует PMSM для приведения в движение.
Но главное отличие заключается в обратной ЭДС. PMSM имеет синусоидальную обратную ЭДС, а BLDC — трапециевидную. Они обладают высокой мощностью и могут использоваться в высокопроизводительных приложениях, таких как спортивные автомобили, автобусы и т. Д. Nissan Leaf использует PMSM для приведения в движение.Трехфазный асинхронный двигатель
Асинхронный двигатель в электромобиляхВ отличие от двигателей постоянного тока, асинхронные двигатели не обладают высоким пусковым моментом. Это дешево по сравнению с другими доступными вариантами. Но не соглашайтесь с ценой. Он по-прежнему имеет очень высокий КПД и может выдерживать суровые условия окружающей среды. Tesla Model S использует этот тип двигателя. Даже Tata и TVS планируют использовать асинхронные двигатели в своих электромобилях. Индийские железные дороги также начали использовать асинхронные двигатели вместо двигателей постоянного тока.
Но откуда у электродвигателя мощность?
Ответ простой, от аккума. Ага! Но что интересно, так это то, что существуют разные типы батарей. Давайте сравним типы по некоторым основным параметрам, связанным с батареями.
Ага! Но что интересно, так это то, что существуют разные типы батарей. Давайте сравним типы по некоторым основным параметрам, связанным с батареями.
| Параметры | Литий-ионный | Никель-металл | Свинцово-кислотный | Суперконденсаторы |
| Низкая стоимость | ✔ | ✖ | ✔ | ✖ |
| Энергоэффективность | ✔ | ✔ | ✔ | ✔ |
| Темп.Производительность | ✔ | ✖ | ✖ | ✔ |
| Малый вес | ✔ | ✔ | ✔ | ✔ |
| Жизненный цикл | ✔ | ✖ | ✔ | ✖ |
Литий-ионные батареи используются повсеместно, потому что они надежны, просты в использовании, дешевле и энергоэффективны.
Я вижу разные виды электромобилей! Кто они такие?
Вы наверняка встречали на рынке разные типы электрики. Некоторые из них полностью электрические, а некоторые — с двигателями ic. Итак, в какие именно категории они попадают? Электромобили подразделяются на три основные категории: электромобили с аккумулятором (BEV), гибридные электромобили (PHEV) и гибридные электромобили (HEV). Давайте глубже погрузимся в мир типов электромобилей.
Аккумулятор для электромобиля (BEV)
Компоненты полностью электрического автомобиля | кредиты: afdc.energy.gov
Это те, которые вы называете полностью электрическим транспортным средством. Этот тип электромобиля не содержит никаких других источников срабатывания, кроме двигателей и аккумуляторов. В этих транспортных средствах нет выбросов. Аккумулятор заряжается от внешнего источника питания, такого как быстрое зарядное устройство постоянного тока или зарядные устройства переменного тока.

В среднем BEV требуется около 8 часов для полной зарядки с помощью зарядного устройства переменного тока.Это время можно сократить до 1 часа, используя быстрое зарядное устройство постоянного тока.
Эти электромобили имеют диапазон от 250 до 500 км в зависимости от емкости аккумулятора и двигателя. Некоторые из четырехколесных транспортных средств BEV в Индии — это Tata Nexon EV, Hyundai Kona Electric, Mahindra eKUV100, MG ZS EV и другие. Двухколесные BEV в Индии включают Ather 450, TVS iQube, Bajaj Chetak Electric и многие другие стартапы, которые планируют запустить к концу этого года.
Посмотрите: Tata Nexon EV против MG ZS EV против Hyundai Kona Electric: подробное сравнениеГибридный электромобиль (HEV)
Гибридный электромобиль | Типы электромобилей | кредиты: afdc.energy.govЭлектромобили этого типа питаются как от топлива, так и от электричества. Электроэнергия вырабатывается собственной тормозной системой автомобиля.
 Тепло, выделяемое тормозами, преобразуется в электрическую энергию. Этот процесс преобразования называется рекуперативным торможением.
Тепло, выделяемое тормозами, преобразуется в электрическую энергию. Этот процесс преобразования называется рекуперативным торможением.
Электродвигатель используется для запуска HEV. Затем двигателем занимается двигатель внутреннего сгорания. Это обеспечивает лучшую экономию топлива. Работа двигателя, а также двигателя контролируется ЭБУ.Некоторые HEV в Индии — это Toyota Prius Hybrid, Honda Civic Hybrid и Toyota Camry Hybrid. Maruti Suzuki также недавно представила свою гибридную систему в нескольких моделях.Подключаемый гибридный электромобиль (PHEV)
PHEV | Типы электромобилейЭто типы гибридных электромобилей, которые могут заряжать батареи посредством рекуперативного торможения или от внешнего источника энергии. HEV перемещаются примерно за 3-4 км / сек до включения двигателя, PHEV могут разгоняться до 65 км / сек, прежде чем двигатель предоставит необходимую помощь для движения транспортного средства.В Индии доступны следующие варианты PHEV: Mahindra e-Verito, BMW i8 и Volvo XC90 T8.
Это все, что вам нужно знать о работе электромобиля, его типах и компонентах. Мы что-нибудь пропустили? Расскажите нам в разделе комментариев ниже.
Электродвигатель
Электродвигатель преобразует электрическую энергию в механическую энергию .
Большинство электродвигателей работают за счет взаимодействия магнитных полей и проводников с током для создания силы.Обратный процесс, производящий электрическую энергию из механической энергии, осуществляется генераторами, такими как генератор переменного тока или динамо-машина; некоторые электродвигатели также могут использоваться в качестве генераторов, например, тяговый двигатель на транспортном средстве может выполнять обе задачи. Электродвигатели и генераторы обычно называют электрическими машинами.
Электродвигатели используются в самых разных областях, таких как промышленные вентиляторы, нагнетатели и насосы, станки, бытовая техника, электроинструменты и дисководы.Они могут питаться от постоянного тока, например, . , портативное устройство или автомобиль с батарейным питанием, или переменным током от центральной распределительной сети или инвертора. Самые маленькие моторы можно найти в наручных электрических часах. Двигатели среднего размера с строго стандартизованными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования. Самые большие электродвигатели используются для приведения в движение судов, трубопроводных компрессоров и водяных насосов мощностью в миллионы ватт.Электродвигатели можно классифицировать по источнику электроэнергии, по их внутренней конструкции, по их применению или по типу движения, которое они создают.
Физический принцип производства механической силы за счет взаимодействия электрического тока и магнитного поля был известен еще в 1821 году. Электродвигатели с повышенным КПД создавались на протяжении всего 19 века, но коммерческое использование электродвигателей в больших масштабах требовало эффективные электрические генераторы и электрические распределительные сети.
Некоторые устройства преобразуют электричество в движение, но не генерируют полезную механическую энергию в качестве основной цели, поэтому их обычно не называют электродвигателями. Например, магнитные соленоиды и громкоговорители обычно описываются как приводы и преобразователи, [1] соответственно, а не двигатели. Некоторые электродвигатели используются для создания крутящего момента или силы. [2]
История и развитие
Электромагнитный эксперимент Фарадея, 1821 [3]Преобразование электрической энергии в механическую с помощью электромагнитных средств было продемонстрировано британским ученым Майклом Фарадеем в 1821 году.Свободно висящий провод погружали в бассейн с ртутью, на который помещали постоянный магнит. Когда через провод пропускали ток, он вращался вокруг магнита, показывая, что ток вызывает близкое круговое магнитное поле вокруг провода. [4] Этот двигатель часто демонстрируется на школьных уроках физики, но вместо токсичной ртути иногда используется рассол (соленая вода). Это простейшая форма класса устройств, называемых униполярными двигателями. Более поздняя доработка — колесо Барлоу.Это были только демонстрационные устройства, непригодные для практического применения из-за своей примитивной конструкции. [ необходима ссылка ]
«Электромагнитный ротор» Джедлика, 1827 г. (Музей прикладного искусства, Будапешт. Исторический двигатель прекрасно работает и сегодня. [5] )В 1827 году венгерский физик Аньош Йедлик начал экспериментировать с устройствами, которые он назвал «электромагнитными самовращающимися роторами». Хотя они использовались только в учебных целях, в 1828 году Джедлик продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока: статор, ротор и коммутатор.В устройстве не использовались постоянные магниты, так как магнитные поля как стационарных, так и вращающихся компонентов создавались исключительно токами, протекающими через их обмотки. [6] [7] [8] [9] [10] [11]
Первые электродвигатели
Первый электродвигатель постоянного тока коммутаторного типа, способный вращать механизмы, был изобретен британским ученым Уильямом Стердженом в 1832 году. [12] Следуя работе Стерджена, электродвигатель постоянного тока коммутаторного типа был разработан с намерением коммерческого использования был построен американцами Эмили и Томасом Давенпортами и запатентован в 1837 году.Их двигатели работали со скоростью до 600 оборотов в минуту, они приводили в действие станки и печатный станок. [13] Из-за высокой стоимости цинковых электродов, необходимых для питания первичной батареи, двигатели не имели коммерческого успеха, и Davenports обанкротились. Несколько изобретателей последовали за Sturgeon в разработке двигателей постоянного тока, но все столкнулись с одними и теми же проблемами стоимости с питанием от первичной батареи. В то время не было развито распределение электроэнергии. Как и в случае с двигателем Стерджена, эти двигатели не имели практического коммерческого рынка. [ необходима ссылка ]
В 1855 году Джедлик построил устройство, использующее принципы, аналогичные тем, которые использовались в его электромагнитных самовращающихся роторах, которое было способно выполнять полезную работу. [6] [8] В том же году он построил модель автомобиля с электродвигателем. [14]
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил изобретенную им динамо-машину со вторым аналогичным устройством, управляя им как двигателем. Машина Gramme была первым электродвигателем, получившим успех в отрасли. [ необходима ссылка ]
В 1886 году Фрэнк Джулиан Спраг изобрел первый практический двигатель постоянного тока, неискрящий двигатель, способный работать с постоянной скоростью при переменных нагрузках. Другие электрические изобретения Sprague примерно в это время значительно улучшили распределение электроэнергии в сети (предыдущая работа была проделана, когда использовалась Томасом Эдисоном), позволили вернуть энергию от электродвигателей в электрическую сеть, обеспечив ее распределение между тележками через воздушные провода и опору троллейбуса. и предоставил системы управления для электрических операций.Это позволило Спрэгу использовать электродвигатели для изобретения первой системы электрических тележек в 1887–88 годах в Ричмонде, штат Вирджиния, электрического лифта и системы управления в 1892 году, а также электрического метро с вагонами с автономным приводом и централизованным управлением, которое было впервые установлено в 1892 году в Чикаго. около южной стороны надземной железной дороги, где он стал широко известен как «L». Двигатель Спрага и связанные с ним изобретения привели к взрыву интереса к электродвигателям и их использованию в промышленности, в то время как почти одновременно с этим другой великий изобретатель разрабатывал своего основного конкурента, который стал бы гораздо более распространенным.
В 1888 году Никола Тесла изобрел первый реально работающий двигатель переменного тока, а вместе с ним и многофазную систему передачи энергии. Тесла продолжил свою работу над двигателем переменного тока в последующие годы в компании Westinghouse.
Разработка электродвигателей приемлемого КПД была отложена на несколько десятилетий из-за непонимания чрезвычайной важности относительно небольшого воздушного зазора между ротором и статором. Эффективные конструкции имеют сравнительно небольшой воздушный зазор. [15]
Отель St.Мотор Луи, долгое время использовавшийся в классах для демонстрации моторных принципов, крайне неэффективен по той же причине, а также совершенно не похож на современный мотор. Фотография традиционной формы мотора Сент-Луиса: [4]
Применение электродвигателей произвело революцию в отрасли. Промышленные процессы больше не ограничивались передачей энергии с использованием линейных валов, ремней, сжатого воздуха или гидравлического давления. Вместо этого каждая машина может быть оснащена собственным электродвигателем, обеспечивающим простое управление в месте использования и повышающим эффективность передачи энергии.Электродвигатели, применяемые в сельском хозяйстве, избавили людей и животных от таких задач, как обработка зерна или перекачивание воды. Использование электродвигателей в домашних условиях сократило объем тяжелого домашнего труда и сделало возможными более высокие стандарты удобства, комфорта и безопасности. Сегодня электродвигатели потребляют более половины всей производимой электроэнергии. [16] [17]
Терминология
В электродвигателе подвижная часть называется ротором , а неподвижная часть называется статором .Магнитные поля создаются на полюсах , и это могут быть выступающих полюса , где они возбуждаются обмотками электрического провода. Заштрихованный полюс содержит индуктор для задержки фазы магнитного поля для этого полюса.
Коммутатор переключает ток на обмотки ротора в зависимости от угла ротора.
Двигатель постоянного тока питается от постоянного тока, хотя почти всегда имеется внутренний механизм (например, коммутатор), преобразующий постоянный ток в переменный для части двигателя.Электродвигатель переменного тока питается переменным током, что часто позволяет избежать использования коммутатора. Синхронный двигатель — это двигатель переменного тока, который работает со скоростью, фиксированной на долю частоты источника питания, а асинхронный двигатель — это двигатель переменного тока, обычно асинхронный двигатель, скорость которого замедляется с увеличением крутящего момента до немного меньше синхронная скорость. Универсальные двигатели могут работать как от переменного, так и от постоянного тока, хотя максимальная частота переменного тока может быть ограничена.
Принцип действия
Для изготовления электродвигателей используются как минимум 3 различных принципа работы: магнетизм, электростатика, пьезоэлектрический. Безусловно, наиболее распространенным является магнитный.
Магнитный
Почти все электродвигатели основаны на магнетизме. В этих двигателях магнитные поля образуются как в роторе, так и в статоре. Продукт между этими двумя полями создает силу и, следовательно, крутящий момент на валу двигателя. Одно или оба из этих полей должны изменяться при вращении двигателя.Это делается путем включения и выключения шестов в нужное время или изменения силы шеста.
Категоризация
Основными типами являются двигатели постоянного и переменного тока, хотя продолжающаяся тенденция к электронному управлению несколько смягчает различие, [ необходима цитата ] [ сомнительно — обсудить ] , поскольку современные драйверы переместили коммутатор из кожух двигателя для некоторых типов двигателей постоянного тока.
Учитывая, что все вращающиеся (или линейные) электродвигатели требуют синхронизма между движущимся магнитным полем и движущимся токовым слоем для создания среднего крутящего момента, существует четкое различие между асинхронным двигателем и синхронным типом.Асинхронный двигатель требует скольжения — относительного движения между магнитным полем (создаваемым статором) и набором обмоток (ротором) для индукции тока в роторе за счет взаимной индуктивности. Самый распространенный пример асинхронных двигателей — это обычный асинхронный двигатель переменного тока, который должен проскальзывать для создания крутящего момента.
В синхронных типах индукция (или скольжение) не является обязательным условием для создания магнитного поля или тока (например, двигатели с постоянными магнитами, синхронные бесщеточные электрические машины с двойным питанием ротора).
Номинальная выходная мощность также используется для классификации двигателей. Например, двигатели мощностью менее 746 Вт часто называют двигателями с дробной мощностью (FHP) в соответствии со старыми имперскими мерками.
Примечания:
- Универсальные двигатели могут также работать с частотой сети переменного тока (вращение не зависит от частоты переменного напряжения).
- Вращение синхронно с частотой переменного напряжения
- Вращение всегда медленнее синхронного.
Двигатели постоянного тока
Двигатель постоянного тока предназначен для работы от постоянного тока. Двумя примерами чистых конструкций постоянного тока являются униполярный двигатель Майкла Фарадея (что необычно) и двигатель на шариковых подшипниках, который (пока) является новинкой. Безусловно, наиболее распространенными типами двигателей постоянного тока являются щеточные и бесщеточные типы, в которых используется внутренняя и внешняя коммутация соответственно для реверсирования тока в обмотках синхронно с вращением.
Двигатели с постоянными магнитами
Основная статья: Электродвигатель с постоянными магнитами
Двигатель с постоянными магнитами не имеет обмотки возбуждения на раме статора, вместо этого используются постоянные магниты, которые создают магнитное поле, с которым поле ротора взаимодействует для создания крутящего момента.Компенсирующие обмотки, включенные последовательно с якорем, могут использоваться на больших двигателях для улучшения коммутации под нагрузкой. Поскольку это поле является фиксированным, его нельзя настроить для управления скоростью. Поля с постоянными магнитами (статоры) удобны в миниатюрных двигателях, так как они исключают потребление энергии обмоткой возбуждения. Большинство более крупных двигателей постоянного тока относятся к типу «динамо», которые имеют обмотки статора. Исторически сложилось так, что постоянные магниты нельзя было заставить сохранять высокий магнитный поток, если бы они были разобраны; обмотки возбуждения были более практичными для получения необходимого количества магнитного потока.Однако большие постоянные магниты дороги, опасны и сложны в сборке; это благоприятствует намотанным полям для больших машин.
Для минимизации общего веса и размера в миниатюрных двигателях с постоянными магнитами могут использоваться высокоэнергетические магниты, сделанные из неодима или других стратегических элементов; большинство из них — сплав неодим-железо-бор. Благодаря более высокой плотности потока электрические машины с высокоэнергетическими постоянными магнитами, по крайней мере, конкурентоспособны со всеми оптимально сконструированными синхронными и индукционными электрическими машинами с однополярным питанием.Миниатюрные двигатели напоминают структуру на иллюстрации, за исключением того, что у них есть по крайней мере три полюса ротора (для обеспечения запуска, независимо от положения ротора), а их внешний корпус представляет собой стальную трубку, которая магнитно связывает внешние части изогнутых магнитов поля.
Двигатели постоянного тока с щетками
Основная статья: Матовый электродвигатель постоянного тока Работа щеточного электродвигателя с двухполюсным ротором и статором на постоянных магнитах. («N» и «S» обозначают полярности на внутренних сторонах магнитов; внешние грани имеют противоположные полярности.) Электродвигателипостоянного тока имеют переменный ток в фазном роторе, также называемом якорем, с разъемным кольцевым коммутатором и статором с фазным или постоянным магнитом. Коммутатор и щетки представляют собой долговечный поворотный переключатель. Ротор состоит из одной или нескольких катушек проволоки, намотанных на ламинированный «мягкий» ферромагнитный сердечник на валу; источник электроэнергии питает обмотки ротора через коммутатор и его щетки, временно намагничивая сердечник ротора в определенном направлении. Коммутатор переключает питание на катушки по мере вращения ротора, предотвращая полное совпадение магнитных полюсов ротора с магнитными полюсами поля статора, так что ротор никогда не останавливается (как это делает стрелка компаса), а скорее продолжает вращаться. пока подано питание.
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. Искры создаются щетками, замыкая и размыкая цепи через катушки ротора, когда щетки пересекают изолирующие промежутки между секциями коллектора. В зависимости от конструкции коммутатора, это может включать в себя замыкание щеток между соседними секциями — и, следовательно, концами катушки — на мгновение при пересечении промежутков. Кроме того, индуктивность катушек ротора заставляет напряжение на каждой из них повышаться при размыкании цепи, увеличивая искрение щеток.Это искрение ограничивает максимальную скорость машины, так как слишком быстрое искрение приведет к перегреву, разрушению или даже расплавлению коллектора. Плотность тока на единицу площади щеток в сочетании с их удельным сопротивлением ограничивает мощность двигателя. Замыкание и размыкание электрического контакта также вызывает электрический шум; искрение порождает радиопомехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию (на более крупных двигателях) или замене (на небольших двигателях).Сборка коммутатора на большом двигателе — дорогостоящий элемент, требующий точной сборки многих деталей. В небольших двигателях коммутатор обычно постоянно встроен в ротор, поэтому его замена обычно требует замены всего ротора.
Хотя большинство коммутаторов имеют цилиндрическую форму, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (обычно не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щеток, чтобы максимизировать мощность двигателя, но маленькие щетки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать без чрезмерного подпрыгивания щеток и искрения (сравнимо с проблемой «смещения клапана» «в двигателях внутреннего сгорания).(Маленькие щетки также желательны для более низкой стоимости.) Более жесткие щеточные пружины также могут использоваться, чтобы заставить щетки заданной массы работать с более высокой скоростью, но за счет больших потерь на трение (более низкая эффективность) и ускоренного износа щеток и коллектора. Следовательно, конструкция щетки двигателя постоянного тока предполагает компромисс между выходной мощностью, скоростью и эффективностью / износом.
- Терминологические пояснения
- Первыми практическими электродвигателями, использовавшимися для уличных железных дорог, были электродвигатели постоянного тока с коммутаторами.Электроэнергия подавалась на коммутаторы (сделанные из меди) с помощью медных щеток, но разница напряжений между соседними шинами коллектора, отличная проводимость медных щеток и искрение вызвали значительный ущерб уже после довольно короткого периода работы. Инженер-электрик понял, что замена медных щеток электрически резистивными твердыми угольными блоками продлит срок службы. Хотя этот термин больше не является описательным, угольные блоки продолжают называть «щетками» и по сей день.
- Скульпторы, работающие с глиной, нуждаются в опорных конструкциях, называемых арматурами, чтобы предотвратить проседание больших изделий под действием силы тяжести. Магнитные пластинки в роторе с обмотками также поддерживают катушки из изолированной медной проволоки. По аналогии, намотанные роторы стали называть «якорями». [ необходима ссылка ]
- Коммутаторы, по крайней мере среди некоторых людей, которые работают с ними ежедневно, стали настолько привычными, что некоторые даже не осознают, что они представляют собой лишь особую разновидность поворотных электрических переключателей.Учитывая, как часто возникают и разрываются связи, у них очень долгий срок службы.
Существует пять типов щеточных двигателей постоянного тока:
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой Составной двигатель постоянного тока
- (две конфигурации):
- Суммарное соединение
- Дифференциально сложенный
- Двигатель постоянного тока с постоянными магнитами (не показан)
- Отдельно возбужденный (не показан)
Бесщеточные двигатели постоянного тока
Основная статья: Бесщеточный электродвигатель постоянного токаНекоторые проблемы щеточного двигателя постоянного тока устранены в бесщеточной конструкции.В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора. Бесщеточные двигатели обычно имеют КПД 85–90% или более, КПД бесщеточного электродвигателя достигает 96,5%, как сообщалось [18] , тогда как двигатели постоянного тока с щеточной передачей обычно имеют КПД 75–80%.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные по принципу, очень похожему на шаговые двигатели, они часто используют внешний ротор с постоянными магнитами, три фазы приводных катушек, могут использовать датчики эффекта Холла для определения положения ротора и соответствующую приводную электронику.Катушки активируются, одна фаза за другой, управляющей электроникой в соответствии с сигналами либо от датчиков эффекта Холла, либо от обратной ЭДС (электродвижущей силы) неприведенных катушек. Фактически, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода. Специализированный класс контроллеров бесщеточных двигателей постоянного тока использует обратную связь по ЭДС через основные фазовые соединения вместо датчиков Холла для определения положения и скорости. Эти двигатели широко используются в электромобилях с радиоуправлением.Когда они сконфигурированы с магнитами снаружи, разработчики моделей называют их двигателями внешнего хода.
Бесщеточные двигатели постоянного токаобычно используются там, где требуется точное управление скоростью, например, в дисководах компьютеров или кассетных видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. и копировальные аппараты. Они имеют ряд преимуществ перед обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока.Эта холодная операция приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; Бесщеточный двигатель без коммутатора или щеток может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же датчики на эффекте Холла, которые обеспечивают коммутацию, могут также обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением).В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен», а также для обеспечения обратной связи по скорости вращения.
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Бесщеточные двигатели не имеют шансов на искрение, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом. Кроме того, искрение генерирует озон, который может накапливаться в плохо вентилируемых зданиях, опасаясь причинения вреда здоровью людей.
- Бесщеточные двигатели обычно используются в небольшом оборудовании, таком как компьютеры, и обычно используются в вентиляторах, чтобы избавиться от нежелательного тепла.
- Это также очень тихие двигатели с акустической точки зрения, что является преимуществом при использовании в оборудовании, подверженном вибрации.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Импульсные реактивные двигатели
6/4 полюсный реактивный электродвигательОсновная статья: Импульсный реактивный двигатель
Импульсный реактивный электродвигатель (SRM) не имеет щеток или постоянных магнитов, а в роторе нет электрических токов. Вместо этого крутящий момент возникает из-за небольшого несовпадения полюсов ротора с полюсами статора. Ротор выравнивается с магнитным полем статора, в то время как обмотки статора поля статора последовательно возбуждаются для вращения поля статора.
Магнитный поток, создаваемый обмотками возбуждения, следует по пути наименьшего магнитного сопротивления, что означает, что поток будет проходить через полюса ротора, которые находятся ближе всего к возбужденным полюсам статора, тем самым увеличивая эти полюса ротора и создавая крутящий момент. Когда ротор вращается, различные обмотки будут запитаны, поддерживая вращение ротора.
Импульсные реактивные электродвигатели теперь используются в некоторых устройствах. [19] .
Двигатели постоянного тока без сердечника или железа
Миниатюрный двигатель без сердечникаПринципиально ни один из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора действительно вращались.Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Этим фактом пользуется двигатель постоянного тока без сердечника или железа , специализированная форма щеточного или бесщеточного двигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму цилиндра, заполненного обмоткой, или самонесущей конструкции, содержащей только магнитный провод и связующий материал.Ротор может помещаться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во второй конструкции корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитомягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для магнитного потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника.
Среди этих типов есть типы дискового ротора, более подробно описанные в следующем разделе.
Вибрационные двигатели для сотовых телефонов иногда представляют собой крошечные цилиндрические типы с постоянным магнитным полем, но есть также дисковые типы, которые имеют тонкий многополярный дисковый магнит поля и преднамеренно несбалансированную структуру ротора из формованного пластика с двумя связанными без сердечника катушками.Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и катушки, размещенной между полюсами тонких постоянных магнитов с высокой магнитной индукцией. Это быстрые позиционеры головки для жестких дисков («жестких дисков»). Хотя современный дизайн значительно отличается от громкоговорителей, он все еще свободно (и неправильно) называется структурой «звуковой катушки», потому что некоторые более ранние головки жесткого диска двигались по прямым линиям и имели структуру привода, очень похожую на это громкоговоритель.
Двигатели постоянного тока с печатным рисунком якоря или блинчика
Основная статья: блин (игровая машина)Двигатель довольно необычной конструкции, якорь с печатным рисунком, или двигатель-блинчик, имеет обмотки в форме диска, перемещающегося между группами магнитов с большим магнитным потоком. Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее чрезвычайно плоского профиля, хотя с момента ее создания у технологии было много торговых марок, таких как ServoDisc.
Якорь с печатным рисунком (первоначально сформированный на печатной плате) в двигателе с печатным рисунком якоря изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитных материалов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию очень компактной.
Альтернативный метод производства заключается в использовании намотанного медного провода, уложенного плоско с центральным обычным коммутатором, в форме цветка и лепестка.Обмотки обычно стабилизируются путем пропитки систем электролитической эпоксидной заливки. Это эпоксидные смолы с наполнителем, которые имеют умеренную смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низким экзотермическим эффектом и, как правило, признаны UL 1446 в качестве заливочного компаунда для использования при температуре до 180 ° C (класс H) (файл UL № E 210549).
Уникальное преимущество двигателей постоянного тока без железа состоит в том, что они не имеют зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами).Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью не содержит железа, хотя железные роторы являются слоистыми. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую частоту переключения (> 40 кГц) или постоянный ток из-за уменьшения электромагнитной индукции.
Эти двигатели были первоначально изобретены для привода приводов магнитных лентопротяжных устройств в быстрорастущей компьютерной индустрии, где минимальное время для достижения рабочей скорости и минимальный тормозной путь были критическими.Блинные двигатели до сих пор широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах гуманоидов, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию конструкций, доступных в настоящее время, технология используется в приложениях, от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Универсальные двигатели
Современный недорогой универсальный мотор от пылесоса. Обмотки возбуждения окрашены в темно-медный цвет по направлению к задней части с обеих сторон. Ламинированный сердечник ротора серый металлик с темными прорезями для намотки катушек.Коммутатор (частично скрыт) потемнел от использования; это впереди. Большая коричневая деталь из формованного пластика на переднем плане поддерживает направляющие и щетки (с обеих сторон), а также передний подшипник двигателя.Двигатель с последовательной обмоткой называется универсальным двигателем , если он был разработан для работы от источника переменного или постоянного тока. Он может хорошо работать на переменном токе, потому что ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) синхронно, и, следовательно, результирующая механическая сила будет возникать в постоянном направлении вращения.
Универсальные двигатели, работающие на обычных частотах линии электропередачи, часто имеют диапазон, редко превышающий 1000 Вт. Универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя в электрических железных дорогах. В этом приложении использование переменного тока для питания двигателя, изначально предназначенного для работы на постоянном токе, привело бы к потерям эффективности из-за нагрева их магнитных компонентов вихревыми токами, особенно полюсных наконечников поля двигателя, которые для постоянного тока использовали бы твердые ( ламинированный) утюг.Хотя эффекты нагрева уменьшаются за счет использования многослойных полюсных наконечников, используемых для сердечников трансформаторов, и использования пластин из электротехнической стали с высокой проницаемостью, одним из решений, доступных в начале 20-го века, было использование электродвигателей от низкочастотные источники переменного тока, обычно с частотой 25 и 16,7 Гц. Поскольку они использовали универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса или воздушного провода с питанием от постоянного тока.Кроме того, учитывая, что паровые двигатели напрямую приводили в действие многие генераторы переменного тока, их относительно низкие частоты вращения благоприятствовали низким частотам, потому что требовалось сравнительно мало полюсов статора.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют некоторые характеристики, более общие для двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и недолгий срок службы коммутатора.Такие двигатели используются в таких устройствах, как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами и часто требуют высокого пускового момента. Непрерывное управление скоростью универсального двигателя, работающего от переменного тока, легко достигается с помощью тиристорной схемы, в то время как несколько отводов на катушке возбуждения обеспечивают (неточное) ступенчатое управление скоростью. Бытовые блендеры, рекламирующие множество скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает от полуволнового выпрямленного переменного тока).
В прошлом двигатели с отталкивающим пуском с фазным ротором обеспечивали высокий пусковой момент, но с дополнительной сложностью. Их роторы были похожи на роторы универсальных двигателей, но их щетки были связаны только друг с другом. Трансформатор индуцировал ток в ротор. Положение щетки относительно полюсов поля означало, что пусковой момент создавался отталкиванием ротора от полюсов поля. Центробежный механизм, когда он близок к рабочей скорости, соединил все стержни коллектора вместе, чтобы создать эквивалент ротора с короткозамкнутым ротором.К тому же, когда скорость была близка к рабочей, более совершенные двигатели поднимали щетки вне контакта.
Асинхронные двигатели не могут вращать вал быстрее, чем разрешено частотой сети. В отличие от этого универсальные двигатели обычно работают на высоких скоростях, что делает их полезными для таких устройств, как блендеры, пылесосы и фены, где желательны высокая скорость и легкий вес. Они также обычно используются в портативных электроинструментах, таких как дрели, шлифовальные машины, циркулярные и лобзиковые пилы, где характеристики двигателя хорошо работают.Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, в то время как Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об / мин.
Универсальные двигателитакже подходят для электронного управления скоростью и, как таковые, являются идеальным выбором для бытовых стиральных машин. Двигатель можно использовать для перемешивания барабана (как вперед, так и назад), переключая обмотку возбуждения относительно якоря. Двигатель также может работать до высоких скоростей, необходимых для цикла отжима.
Двигатель может выйти из строя из-за превышения скорости (работа с частотой вращения, превышающей расчетные пределы), если агрегат работает без значительной нагрузки.На более мощных двигателях следует избегать внезапной потери нагрузки, и возможность такого явления включена в схемы защиты и управления двигателя. В некоторых небольших приложениях лопасть вентилятора, прикрепленная к валу, часто действует как искусственная нагрузка, чтобы ограничить скорость двигателя до безопасного уровня, а также как средство для циркуляции охлаждающего воздуха по якорю и обмоткам возбуждения.
Двигатели переменного тока
В 1882 году Никола Тесла открыл вращающееся магнитное поле и впервые применил вращающееся силовое поле для работы машин.Он использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. В 1885 году Галилео Феррарис независимо исследовал эту концепцию. В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
Тесла предположил, что коммутаторы из машины могут быть удалены, и устройство может работать во вращающемся силовом поле. Его учитель профессор Пошель заявил, что это было бы похоже на создание вечного двигателя. [20] Тесла позже достигнет U.S. Патент 0,416,194, Электродвигатель (декабрь 1889 г.), который напоминает двигатель, изображенный на многих фотографиях Теслы. Этот классический электромагнитный двигатель переменного тока был асинхронным.
Михаил Осипович Доливо-Добровольский позже в 1890 году изобрел трехфазный «клеточный ротор». Сейчас этот тип двигателя используется в подавляющем большинстве коммерческих приложений.
Двигатель переменного тока состоит из двух частей: неподвижного статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и ротора, прикрепленного к выходному валу, которому крутящий момент создается вращающимся полем.
Электродвигатель переменного тока со скользящим ротором
Тормозной двигатель с коническим ротором включает тормоз как неотъемлемую часть конического скользящего ротора. Когда двигатель находится в состоянии покоя, пружина воздействует на скользящий ротор и прижимает тормозное кольцо к тормозной крышке в двигателе, удерживая ротор в неподвижном состоянии. Когда двигатель находится под напряжением, его магнитное поле создает как осевую, так и радиальную составляющую. Осевой компонент преодолевает силу пружины, освобождая тормоз; в то время как радиальный компонент заставляет ротор вращаться.Дополнительного управления тормозом не требуется.
Синхронный электродвигатель
Основная статья: Синхронный двигательСинхронный электродвигатель — это электродвигатель переменного тока, отличающийся тем, что ротор вращается с катушками, пропускающими магниты с той же скоростью, что и переменный ток, и возникающим магнитным полем, которое его приводит в действие. Другими словами, он имеет нулевое скольжение в обычных условиях эксплуатации. Сравните это с асинхронным двигателем, который должен проскальзывать для создания крутящего момента. Один тип синхронного двигателя похож на асинхронный двигатель, за исключением того, что ротор возбуждается полем постоянного тока.Контактные кольца и щетки используются для подачи тока на ротор. Полюса ротора соединяются друг с другом и движутся с одинаковой скоростью, отсюда и название синхронный двигатель. Другой тип, для низкого крутящего момента нагрузки, имеет лыски, притертые к обычному ротору с короткозамкнутым ротором для создания дискретных полюсов. Еще один, например, сделанный Hammond для своих часов до Второй мировой войны, и в более старых органах Hammond, не имеет обмоток ротора и дискретных полюсов. Это не запускается автоматически. Часы требуют ручного запуска с помощью небольшой ручки на задней панели, в то время как старые органы Hammond имели вспомогательный пусковой двигатель, подключенный с помощью подпружиненного переключателя с ручным управлением.
Наконец, гистерезисные синхронные двигатели обычно (по существу) двухфазные двигатели с фазосдвигающим конденсатором для одной фазы. Они запускаются как асинхронные двигатели, но когда скорость скольжения значительно уменьшается, ротор (гладкий цилиндр) временно намагничивается. Благодаря распределенным полюсам он действует как синхронный двигатель с постоянным магнитом и ротором. Материал ротора, как и у обычного гвоздя, останется намагниченным, но его также можно размагнитить без особых усилий. После запуска полюса ротора остаются на месте; они не дрейфуют.
Маломощные синхронные синхронизирующие двигатели (например, для традиционных электрических часов) могут иметь многополюсные внешние чашечные роторы с постоянными магнитами и использовать затеняющие катушки для обеспечения пускового момента. Двигатели с часами Telechron ™ имеют затененные полюса для пускового момента и двухспицевый кольцевой ротор, который работает как дискретный двухполюсный ротор.
Асинхронный двигатель
Основная статья: Асинхронный двигательАсинхронный двигатель — это асинхронный двигатель переменного тока, в котором мощность передается на ротор за счет электромагнитной индукции, подобно действию трансформатора.Асинхронный двигатель напоминает вращающийся трансформатор, потому что статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор (вращающаяся часть) — вторичной стороной. Многофазные асинхронные двигатели широко используются в промышленности.
Асинхронные двигатели можно разделить на двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Двигатели с короткозамкнутым ротором имеют тяжелую обмотку, состоящую из сплошных стержней, обычно из алюминия или меди, соединенных кольцами на концах ротора. Если рассматривать только стержни и кольца в целом, они очень похожи на вращающуюся клетку для упражнений животного, отсюда и название.
Наведенные в эту обмотку токи создают магнитное поле ротора. Форма стержней ротора определяет скоростные характеристики. На низких скоростях ток, индуцируемый в короткозамкнутой клетке, близок к линейной частоте и имеет тенденцию быть во внешних частях клетки ротора. По мере ускорения двигателя частота скольжения становится ниже, и внутри обмотки проходит больший ток. Путем придания стержням формы для изменения сопротивления частей обмотки во внутренней и внешней частях клетки, эффективно вводится переменное сопротивление в цепь ротора.Однако у большинства таких моторов стержни одинаковые.
В двигателе с фазным ротором обмотка ротора состоит из множества витков изолированного провода и соединена с контактными кольцами на валу двигателя. В цепь ротора можно подключить внешний резистор или другие устройства управления. Резисторы позволяют управлять скоростью двигателя, хотя значительная мощность рассеивается на внешнем сопротивлении. Преобразователь может питаться от цепи ротора и возвращать энергию со скользящей частотой, которая иначе была бы потрачена впустую, обратно в систему питания через инвертор или отдельный двигатель-генератор.
Асинхронный двигатель с фазным ротором используется в основном для пуска нагрузки с высоким моментом инерции или нагрузки, требующей очень высокого пускового момента во всем диапазоне скоростей. При правильном выборе резисторов, используемых во вторичном резисторе или пускателе с контактным кольцом, двигатель может создавать максимальный крутящий момент при относительно низком токе питания от нулевой до полной скорости. Этот тип двигателя также обеспечивает регулируемую скорость.
Скорость двигателя можно изменить, поскольку кривая крутящего момента двигателя эффективно изменяется за счет величины сопротивления, подключенного к цепи ротора.Увеличение значения сопротивления приведет к снижению скорости максимального крутящего момента. Если сопротивление, подключенное к ротору, увеличивается за пределами точки, где максимальный крутящий момент возникает при нулевой скорости, крутящий момент будет еще больше уменьшен.
При использовании с нагрузкой, кривая крутящего момента которой увеличивается с увеличением скорости, двигатель будет работать на скорости, при которой крутящий момент, развиваемый двигателем, равен крутящему моменту нагрузки. Уменьшение нагрузки приведет к ускорению двигателя, а увеличение нагрузки приведет к замедлению двигателя до тех пор, пока нагрузка и крутящий момент двигателя не станут равными.При таком использовании потери скольжения рассеиваются на вторичных резисторах и могут быть очень значительными. Регулировка скорости и чистая эффективность также очень плохие.
Электродвигатель с двойным питанием
Основная статья: Электромашина с двойным питаниемЭлектродвигатели с двойным питанием имеют два независимых набора многофазных обмоток, которые вносят активную (т. Е. Рабочую) мощность в процесс преобразования энергии, при этом по крайней мере один из наборов обмоток имеет электронное управление для работы с переменной скоростью.Два независимых набора многофазных обмоток (т. Е. Двойной якорь) — это максимум, предусмотренный в одном корпусе без дублирования топологии. Электродвигатели с двойным питанием — это машины с эффективным диапазоном скорости вращения с постоянным крутящим моментом, который в два раза превышает синхронную скорость для данной частоты возбуждения. Это в два раза больше диапазона скоростей с постоянным крутящим моментом, чем у электрических машин с однополярным питанием, у которых есть только одна активная обмотка.
Двигатель с двойным питанием позволяет использовать электронный преобразователь меньшего размера, но стоимость обмотки ротора и контактных колец может компенсировать экономию на компонентах силовой электроники.Трудности с контролем скорости в приложениях с ограничением синхронной скорости. [21]
Электродвигатель с однополярным питанием
Основная статья: Электромашина с одиночным питанием
Большинство двигателей переменного тока питаются отдельно. Электродвигатели с однополярным питанием имеют одну многофазную обмотку, подключенную к источнику питания. Электромашины с одиночным питанием могут быть индукционными или синхронными. Комплект активной обмотки может управляться электроникой. Электрические машины с однополярным питанием имеют эффективный диапазон скоростей с постоянным крутящим моментом до синхронной скорости для данной частоты возбуждения.
Моментные двигатели
Моментный двигатель (также известный как двигатель с ограниченным крутящим моментом) — это специализированная разновидность асинхронного двигателя, который способен работать неограниченное время при остановке, то есть с блокировкой вращения ротора без повреждения. В этом режиме работы двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название).
Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимом в действие низким напряжением, характеристики этих двигателей позволяют приложить к ленте относительно постоянное легкое натяжение независимо от того, протягивает ли ведущая лента мимо головок ленты.Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты. В мире компьютерных игр моментные двигатели используются в рулевых колесах с обратной связью по усилию.
Еще одно распространенное применение — управление дроссельной заслонкой двигателя внутреннего сгорания в сочетании с электронным регулятором. В этом случае двигатель работает против возвратной пружины, чтобы перемещать дроссельную заслонку в соответствии с выходом регулятора.Последний контролирует частоту вращения двигателя путем подсчета электрических импульсов от системы зажигания или от магнитного датчика [22] и, в зависимости от скорости, делает небольшие корректировки величины тока, подаваемого на двигатель. Если двигатель начинает замедляться относительно желаемой скорости, ток будет увеличиваться, двигатель будет развивать больший крутящий момент, натягиваясь на возвратную пружину и открывая дроссельную заслонку. Если двигатель работает слишком быстро, регулятор снизит ток, подаваемый на двигатель, в результате чего возвратная пружина отодвинется и закроет дроссельную заслонку.
Шаговые двигатели
Основная статья: шаговый двигательПо конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явными полюсами управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается и затем быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности, ротор может вращаться вперед или назад, и он может произвольно менять направление, останавливаться, ускоряться или замедляться в любое время.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками шестерен и, таким образом, вращаться чрезвычайно плавно.Этот режим работы часто называют микрошагом. Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателимогут легко поворачиваться на определенный угол дискретными шагами, поэтому шаговые двигатели используются для позиционирования головки чтения / записи в дисководах компьютерных гибких дисков. Они использовались с той же целью в компьютерных дисковых накопителях до гигабайтной эры, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи жесткого диска.По мере увеличения плотности накопителей, ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — таким образом, в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре в типичном (конусном) громкоговорителе. Эта структура некоторое время использовалась для размещения головок. Современные приводы имеют поворотное крепление катушки; катушка вращается вперед-назад, что-то вроде лопасти вращающегося вентилятора.Тем не менее, подобно звуковой катушке, современные проводники катушки исполнительного механизма (магнитный провод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (точечных матричных и струйных принтеров), а также валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х были заменены широкоформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для перемещения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; у них одна катушка, они потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
Шаговые двигатели были модернизированы для использования в электромобилях под термином SRM (Switched Reluctance Motor).
Сравнение
| Тип | Преимущества | Недостатки | Типичное приложение | Типовой привод |
|---|---|---|---|---|
| Многофазная индукционная беличья клетка переменного тока | Низкая стоимость, длительный срок службы, высокий КПД, доступны большие мощности (до 1 МВт и более), большое количество стандартизованных типов | Пусковой пусковой ток может быть большим, для регулирования скорости требуется источник переменной частоты | Насосы, вентиляторы, нагнетатели, конвейеры, компрессоры | Многофазный переменный ток, переменный ток переменной частоты |
| Электродвигатель с расщепленными полюсами | Низкая стоимость Длительный срок службы | Частота вращения немного ниже синхронной Низкий пусковой крутящий момент Малые характеристики Низкий КПД | Вентиляторы, техника, проигрыватели | Однофазный переменный ток |
| Индукция переменного тока — Беличья клетка, двухфазный конденсатор-пуск | Высокая мощность Высокий пусковой крутящий момент | Скорость немного ниже синхронной Требуется пусковой выключатель или реле | Приборы Стационарные электроинструменты | Однофазный переменный ток |
| Индукция переменного тока — Беличья клетка, двухфазный конденсатор | Умеренная мощность Высокий пусковой крутящий момент Без пускового переключателя Сравнительно долгий срок службы | Скорость немного ниже синхронной Немного дороже | Промышленные воздуходувки Промышленное оборудование | Однофазный переменный ток |
| Асинхронный двигатель переменного тока — Двигатель с короткозамкнутым ротором, расщепленная фаза, вспомогательная пусковая обмотка | Средняя мощность Низкий пусковой крутящий момент | Скорость немного ниже синхронной Требуется пусковой выключатель или реле | Приборы Стационарные электроинструменты | Однофазный переменный ток |
| Универсальный двигатель | Высокий пусковой момент, компактность, высокая скорость. | Техническое обслуживание (щетки) Меньший срок службы Обычно шумит акустически Экономичны только небольшие номиналы | Ручной электроинструмент, блендеры, пылесосы, воздуходувки для изоляции | Однофазный переменный или постоянный ток |
| AC синхронный | Синхронная скорость | Дороже | Промышленные двигатели Часы Проигрыватели виниловых пластинок Ленточные приводы | Одно- или многофазный переменный ток (конденсаторный для однофазного) |
| Шаговый DC | Точное позиционирование Высокий удерживающий момент | Некоторые могут быть дорогостоящими Требуется контроллер | Позиционирование в принтерах и дисководах гибких дисков; промышленные станки | DC |
| Бесщеточный DC | Длительный срок службы Низкие затраты на обслуживание Высокая эффективность | Более высокая начальная стоимость Требуется контроллер | Жесткие («жесткие») дисководы CD / DVD-плееры Электромобили Радиоуправляемые автомобили БПЛА | DC или PWM |
| Реактивный реактивный двигатель | Длительный срок службы Низкие затраты на обслуживание Высокая эффективность Без постоянных магнитов Низкая стоимость Простая конструкция | Требуется контроллер | Приборы Электромобили Текстильные фабрики Применение в самолетах | DC или PWM |
| Матовый DC | Простое регулирование скорости | Техническое обслуживание (щетки) Средний срок службы Дорогой коммутатор и щетки | Сталелитейные заводы Бумагоделательные машины Беговые тренажеры Автомобильные аксессуары | Прямой постоянный ток или ШИМ |
| Блинчики DC | Компактная конструкция Простое регулирование скорости | Средняя стоимость Средняя продолжительность жизни | Office Equip Вентиляторы / насосы, быстрые промышленные и военные сервоприводы | Прямой постоянный ток или ШИМ |
Коэффициент качества
Основная статья: Фактор качества
Профессор Эрик Лэйтуэйт предложил метрику для определения «качества» электродвигателя: [24]
Где:
- G — коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)
- A m , A e — поперечные сечения магнитной и электрической цепи
- l m , l e — длины магнитной и электрической цепей
- мкм — проницаемость сердечника
- ω — угловая частота, при которой двигатель приводится в движение
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям с непостоянными магнитами.
электростатический
Основная статья: Электростатический двигательПолный размер
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями с катушками. Обычно для них требуется источник питания высокого напряжения, хотя в очень маленьких двигателях используется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют высокого тока при низких напряжениях.В 1750-х годах Бенджамин Франклин и Эндрю Гордон разработали первые электростатические двигатели. Сегодня электростатический двигатель часто используется в микромеханических (MEMS) системах, где их управляющее напряжение ниже 100 вольт и где движущиеся заряженные пластины гораздо проще изготовить, чем катушки и железные сердечники. Кроме того, молекулярные механизмы, управляющие живыми клетками, часто основаны на линейных и вращающихся электростатических двигателях.
Наномотор с нанотрубками
Основная статья: наномотор с нанотрубкамиИсследователи из Калифорнийского университета в Беркли недавно разработали подшипники вращения на основе многослойных углеродных нанотрубок.Прикрепив золотую пластину (с размерами порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (как вложенные углеродные цилиндры), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра. Эти подшипники очень прочные; устройства колебались тысячи раз без признаков износа. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации и могут найти свое применение в коммерческих приложениях в будущем.
См. Также:
Пьезоэлектрический
Основная статья: Пьезоэлектрический двигательПьезоэлектрический двигатель или пьезодвигатель — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
Использование и стили
Стандартные электродвигатели часто используются во многих современных машинах, но определенные типы электродвигателей предназначены для конкретных применений.
Поворотный
Применяется во вращающихся машинах, таких как вентиляторы, турбины, дрели, колеса электромобилей, локомотивы и конвейерные ленты. Кроме того, во многих вибрирующих или колеблющихся машинах электродвигатель раскручивает неуравновешенную массу, заставляя электродвигатель (и его монтажную конструкцию) вибрировать. Знакомое приложение — это вибросигналы сотового телефона, которые используются, когда пользователь отключил акустический «звонок».
Электродвигатели также популярны в робототехнике. Они вращают колеса автомобильных роботов, а серводвигатели управляют руками промышленных роботов; они также двигают руками и ногами у человекоподобных роботов.В летающих роботах, наряду с вертолетами, двигатель вращает пропеллер или аэродинамические лопасти несущего винта для создания управляемой подъемной силы.
Электродвигатели заменяют гидроцилиндры в самолетах и военной технике. [25] [26]
На промышленных предприятиях электродвигатели вращают пилы и полотна в процессах резки и нарезки; они вращают детали, обрабатываемые на токарных и других станках, и вращают шлифовальные круги. Быстрые и точные серводвигатели позиционируют инструменты и работают на современных станках с ЧПУ.Миксеры с приводом от двигателя очень распространены в пищевой промышленности. Линейные двигатели часто используются для горизонтального выталкивания продуктов в контейнеры.
Во многих кухонных приборах также используются электродвигатели. Кухонные комбайны и кофемолки вращают лезвия, чтобы измельчать и измельчать продукты. Блендеры используют электродвигатели для смешивания жидкостей, а микроволновые печи используют электродвигатели, чтобы вращать поднос с едой, на которой стоит еда. В тостерах также используются электродвигатели, которые вращают конвейер для перемещения пищи по нагревательным элементам.
Серводвигатель
Основная статья: Серводвигатель
Серводвигатель — это двигатель, который очень часто продается в виде готового модуля, который используется в системе управления положением или скоростью с обратной связью.Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие системы управления. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна. Также важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервоприводов могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости на двигателе.По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника.
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению работает непрерывно, пока двигатель работает; Шаговая система полагается на двигатель, который не «пропускает шаги» для кратковременной точности, хотя шаговая система может включать в себя «исходный» переключатель или другой элемент для обеспечения долговременной стабильности управления. [27] Например, когда запускается струйный компьютерный принтер, его контроллер заставляет шаговый двигатель печатающей головки перемещаться в крайнее левое положение, где датчик положения определяет исходное положение и останавливает шаг.Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Линейный двигатель
Основная статья: линейный двигательЛинейный двигатель — это, по сути, любой электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно встречаются во многих американских горках, где быстрое движение безмоторного железнодорожного вагона контролируется рельсом.Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе по крайней мере один перьевой плоттер XY для компьютерной графики формата Letter (8,5 x 11 дюймов) производства Hewlett-Packard (с конца 1970-х до середины 1980-х) использовал два линейных шаговых двигателя для перемещения пера по двум направлениям. ортогональные оси.
Двигатели космические
Основная статья: двигатель космического корабля с электрическим приводом
Движительная система космического корабля с электрическим приводом представляет собой любую из множества форм электродвигателей, которые космический корабль может использовать для получения механической энергии в космическом пространстве.Большинство этих видов движителей космических аппаратов работают за счет электрического питания топлива до высокой скорости, но электродинамические тросы работают, взаимодействуя с магнитосферой планеты. [28]
Генератор
Основная статья: электрический генераторМногие электродвигатели используются в качестве генераторов либо частично (например, с рекуперативным торможением), либо в течение всего срока их службы. При механическом приводе магнитные электродвигатели вырабатывают мощность за счет своей обратной ЭДС.
Производительность
Преобразование энергии электродвигателем
Используя математические модели в терминах магнитного диполя, Рибарич и Шуштершич [29] рассматривают, как в случае синхронного двигателя и асинхронного двигателя внешний источник подает электрическую энергию на статор, чтобы поддерживать его вращающееся магнитное поле; эта энергия затем передается вращающимся магнитным полем магнитному диполю ротора; там она преобразуется в механическую энергию и механически передается посредством вращающегося вала внешнему пользователю.С другой стороны, в случае коллекторного двигателя внешний источник подает электрическую энергию непосредственно на магнитный диполь ротора для преобразования в механическую энергию.
Мощность
Выходная мощность роторного электродвигателя:
Где P в лошадиных силах, об / мин — это скорость вала в оборотах в минуту, а T — крутящий момент в фут-фунтах.
А для линейного двигателя:
Где P — мощность в ваттах, F — в ньютонах, а v — скорость в метрах в секунду.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую мощность:, где η — эффективность преобразования энергии, P e — входная электрическая мощность, а P m — механическая выходная мощность.
В простейшем случае P e = В I и P м = T ω, где В — входное напряжение, I — входной ток, T — выходной крутящий момент, а ω — выходная угловая скорость.Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Крутящий момент типов двигателей
При оптимальном проектировании в пределах заданного ограничения насыщения сердечника и для заданного активного тока (т. Е. Тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности потока в воздушном зазоре, все категории электрических двигатели или генераторы будут демонстрировать практически одинаковый максимальный постоянный крутящий момент на валу (т.е.е., рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной задней части, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность выдерживать скачки крутящего момента сверх максимального рабочего крутящего момента существенно различается между категориями электродвигателей или генераторов.
Способность к скачкам крутящего момента не следует путать со способностью ослабления поля, присущей полностью электромагнитным электрическим машинам (электрические машины с постоянным магнитом (PM) исключены). Ослабление поля, недоступное для электрических машин с ПМ, позволяет электрической машине работать за пределами расчетной частоты возбуждения.
Электрические машины без топологии цепи трансформатора, такие как полевые машины (например, электромагнит) или постоянные магниты (PM). Синхронные электрические машины не могут реализовать всплески крутящего момента, превышающие максимально расчетный крутящий момент, без насыщения магнитного сердечника и увеличения тока. как бесполезный.Кроме того, узел постоянного магнита синхронных электрических машин с ПМ может быть непоправимо поврежден, если будут предприняты попытки увеличения крутящего момента, превышающего максимально допустимый рабочий крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как индукционные (т. Е. Асинхронные) электрические машины, индукционные электрические машины с двойной подачей питания и индукционные или синхронные электрические машины с двойной подачей ротора (WRDF), демонстрируют очень высокие всплески крутящего момента из-за активного текущий (т.е., Магнитодвижущая сила или произведение тока и витки обмотки), индуцированные с обеих сторон трансформатора, противостоят друг другу, и в результате активный ток не влияет на плотность потока магнитного сердечника трансформатора, что в противном случае привело бы к насыщение керна.
Электрические машины, основанные на принципах индукции или асинхронности, закорачивают один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т.е.е., реальный) ток. Тем не менее, всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент, возможны.
Синхронная электрическая машина WRDF — единственная электрическая машина с действительно двухпортовой топологией трансформаторной схемы (т. Е. Оба порта независимо возбуждаются без короткозамкнутого порта). Топология схемы с двумя портами трансформатора, как известно, нестабильна и требует многофазного узла контактного кольца-щетки для передачи ограниченной мощности на обмотку ротора.Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и проскальзыванием для синхронной работы во время движения или генерации, одновременно обеспечивая бесщеточную мощность для набора обмоток ротора (см. Бесщеточная электрическая машина с двойным питанием из обмотки ротора), активный ток синхронного электрического привода WRDF Машина не будет зависеть от реактивного сопротивления цепи трансформатора, и всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины, будут возможны.Были рассчитаны всплески крутящего момента, превышающие рабочий крутящий момент в восемь раз.
Постоянная плотность крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером области воздушного зазора и глубиной задней части, которые определяются номинальной мощностью комплекта обмотки якоря, скоростью машины и достижимым воздухом. -зазорная магнитная индукция до насыщения активной зоны. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, постоянная плотность крутящего момента практически одинакова для электрических машин с оптимально спроектированными наборами обмоток якоря.Никогда не следует путать постоянную плотность крутящего момента с пиковой плотностью крутящего момента, которая связана с выбранным производителем методом охлаждения, доступным для всех, или периодом работы до разрушения из-за перегрева обмоток или даже повреждения постоянного магнита.
Непрерывная плотность мощности
Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента на диапазон скорости постоянного крутящего момента электрической машины.
Стандарты двигателей
Ниже приведены основные стандарты проектирования и производства электродвигателей:
Ссылки и дополнительная литература
- Цитаты
- ^ Шенхерр, Стивен Ф. [Рибарич М. и Шуштершич Л. Движущиеся точечные заряды, электрические и магнитные диполи, AM.J.Phys.60 (6), июнь 1992 г.]
- Общие ссылки
- Дональд Г. Финк и Х. Уэйн Бити, Стандартное руководство для инженеров-электриков, одиннадцатое издание , МакГроу-Хилл, Нью-Йорк, 1978, ISBN 0-07-020974-X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано П.Ф. Коллиер и сыновья, Нью-Йорк, 1902 г.,
- Купхальдт, Тони Р. (2000–2006). «Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА». Уроки электрических цепей — Том II . http://www.ibiblio.org/obp/electricCircuits/AC/AC_13.html. Проверено 11 апреля 2006.
- «А.О. Смит: переменного и постоянного тока электродвигателей» (PDF). http://www.aosmithmotors.com/uploadedFiles/AC-DC%20manual.pdf. Проверено 7 декабря 2009.
- Resenblat & Frienman Оборудование постоянного и переменного тока
- http://www.streetdirectory.com/travel_guide/115541/technology/understanding_electric_motors_and_their_uses.HTML
- Дополнительная литература
- Шейнфилд Д. Дж., Промышленная электроника для инженеров, химиков и техников, William Andrew Publishing, Norwich, NY, 2001.
- Фитцджеральд / Кингсли / Куско (Фитцджеральд / Кингсли / Уман в более поздние годы), Электрические машины , классический текст для младших и старших студентов-электриков. Первоначально опубликовано в 1952 году, 6-е издание вышло в 2002 году.
- Bedford, B.D .; Хофт, Р.G. et al. (1964). Принципы инверторных схем . Нью-Йорк: John Wiley & Sons, Inc .. ISBN 0 471 06134 4. (Для управления скоростью двигателя с регулируемой частотой используются схемы инвертора)
- Б. Р. Пелли, «Тиристорные преобразователи с фазовым управлением и циклоконвертеры: работа, управление и производительность» (Нью-Йорк: Джон Вили, 1971).
- Джон Н. Чиассон, Моделирование и высокопроизводительное управление электрическими машинами , Wiley-IEEE Press, Нью-Йорк, 2005, ISBN 0-471-68449-X.
