Какие бывают основные виды электродвигателей. Чем отличаются двигатели постоянного и переменного тока. Каковы особенности асинхронных и синхронных двигателей. Где применяются различные типы электродвигателей.
Основные виды электродвигателей
Электродвигатели являются одним из самых распространенных типов электрических машин, применяемых во всех сферах жизни — от бытовой техники до промышленного оборудования. Существует несколько основных видов электродвигателей, различающихся по принципу действия и характеристикам:
- Двигатели постоянного тока
- Двигатели переменного тока:
- Асинхронные
- Синхронные
- Шаговые двигатели
- Линейные двигатели
Каждый тип имеет свои преимущества и недостатки, определяющие области применения. Рассмотрим подробнее основные виды электродвигателей и их особенности.
Двигатели постоянного тока
Двигатели постоянного тока (ДПТ) работают от источника постоянного напряжения. Их основными преимуществами являются:

- Простота регулирования скорости вращения
- Высокий пусковой момент
- Компактные размеры при высокой мощности
По конструкции ДПТ делятся на коллекторные и бесколлекторные. Коллекторные имеют механический узел коммутации — щеточно-коллекторный узел. Бесколлекторные используют электронную коммутацию, что повышает надежность.
Основные области применения ДПТ:
- Электротранспорт (электромобили, электропогрузчики)
- Станкостроение
- Подъемно-транспортные механизмы
- Сервоприводы
Асинхронные двигатели переменного тока
Асинхронные двигатели являются самым распространенным типом электродвигателей. Их основные достоинства:
- Простота конструкции и высокая надежность
- Низкая стоимость
- Высокий КПД
- Возможность работы напрямую от сети переменного тока
Принцип действия асинхронных двигателей основан на взаимодействии вращающегося магнитного поля статора с током, индуцированным в роторе. Скорость вращения ротора всегда меньше скорости магнитного поля (отсюда название «асинхронный»).
Где применяются асинхронные двигатели?

- Насосы, вентиляторы, компрессоры
- Подъемно-транспортное оборудование
- Станки и промышленные механизмы
- Бытовая техника
Синхронные двигатели переменного тока
Синхронные двигатели отличаются от асинхронных тем, что скорость вращения ротора в точности равна скорости вращения магнитного поля статора. Их особенности:
- Высокая стабильность скорости вращения
- Возможность работы с опережающим коэффициентом мощности
- Высокий КПД при больших мощностях
Основные сферы применения синхронных двигателей:
- Генераторы электростанций
- Системы точного позиционирования
Шаговые двигатели
Шаговые двигатели поворачивают вал на фиксированный угол (шаг) при подаче импульса управления. Их ключевые преимущества:
- Высокая точность позиционирования
- Возможность работы без датчика положения
- Высокий момент в режиме удержания
Где используются шаговые двигатели?
- Станки с ЧПУ
- 3D-принтеры
- Роботы и манипуляторы
- Системы точного позиционирования
Линейные двигатели
Линейные двигатели создают поступательное движение без использования передаточных механизмов. Их особенности:

- Высокое быстродействие
- Отсутствие люфтов и механического износа
- Возможность создания больших усилий
Основные области применения линейных двигателей:
- Высокоскоростные транспортные системы
- Прецизионные станки
- Промышленные роботы и манипуляторы
Сравнительные характеристики электродвигателей
При выборе электродвигателя для конкретного применения необходимо учитывать множество факторов. Рассмотрим сравнительные характеристики основных типов двигателей:
| Тип двигателя | Преимущества | Недостатки |
|---|---|---|
| Двигатели постоянного тока |
— Легкость регулирования скорости — Высокий пусковой момент — Компактность |
— Наличие щеточно-коллекторного узла — Сложность конструкции — Высокая стоимость |
| Асинхронные двигатели |
— Простота и надежность — Низкая стоимость — Высокий КПД |
— Сложность регулирования скорости — Низкий пусковой момент |
| Синхронные двигатели |
— Стабильная скорость вращения — Высокий КПД при больших мощностях — Возможность улучшения коэффициента мощности сети |
— Сложность конструкции — Необходимость в системе возбуждения — Высокая стоимость |
Критерии выбора электродвигателя
При выборе электродвигателя для конкретного применения необходимо учитывать следующие основные критерии:

- Требуемая мощность и крутящий момент
- Диапазон и точность регулирования скорости
- Режим работы (продолжительный, повторно-кратковременный)
- Условия эксплуатации (температура, влажность, запыленность)
- Требования к динамическим характеристикам
- Габаритные ограничения
- Стоимость двигателя и системы управления
Правильный выбор типа и характеристик электродвигателя позволяет оптимизировать работу оборудования, снизить энергопотребление и повысить надежность системы в целом.
Тенденции развития электродвигателей
Современные тенденции в области электродвигателей направлены на повышение их эффективности и расширение функциональности. Основные направления развития:
- Применение новых магнитных материалов для повышения КПД
- Интеграция электронных систем управления в конструкцию двигателя
- Разработка высокоскоростных электродвигателей
- Создание специализированных двигателей для электротранспорта
- Миниатюризация двигателей для робототехники и медицинского оборудования
Развитие технологий производства и новых материалов позволяет создавать все более эффективные и компактные электродвигатели, расширяя сферы их применения.

Заключение
Электродвигатели играют ключевую роль в современной технике, обеспечивая преобразование электрической энергии в механическую. Разнообразие типов и конструкций электродвигателей позволяет подобрать оптимальное решение практически для любой задачи — от микроприводов в бытовой технике до мощных промышленных установок.
Правильный выбор типа электродвигателя с учетом особенностей применения позволяет создавать эффективные и надежные системы электропривода. Развитие технологий в области электромашиностроения открывает новые возможности для совершенствования характеристик электродвигателей и расширения сфер их использования.
✔ Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т. д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Типы и виды электродвигателей — переменного и постоянного тока, коллекторные, асинхронные, прямого привода
электрика, сигнализация, видеонаблюдение, контроль доступа (СКУД), инженерно технические системы (ИТС)
Одним из основных стимулов к широкой электрификации, начавшейся в XX веке, стала возможность легкого преобразования энергии электрического тока в механическую — к тому времени уже был известен коллекторный электродвигатель, изобретенный Якоби еще в первой половине XIX века.
Изобретение асинхронного двигателя переменного тока стало еще большим шагом вперед.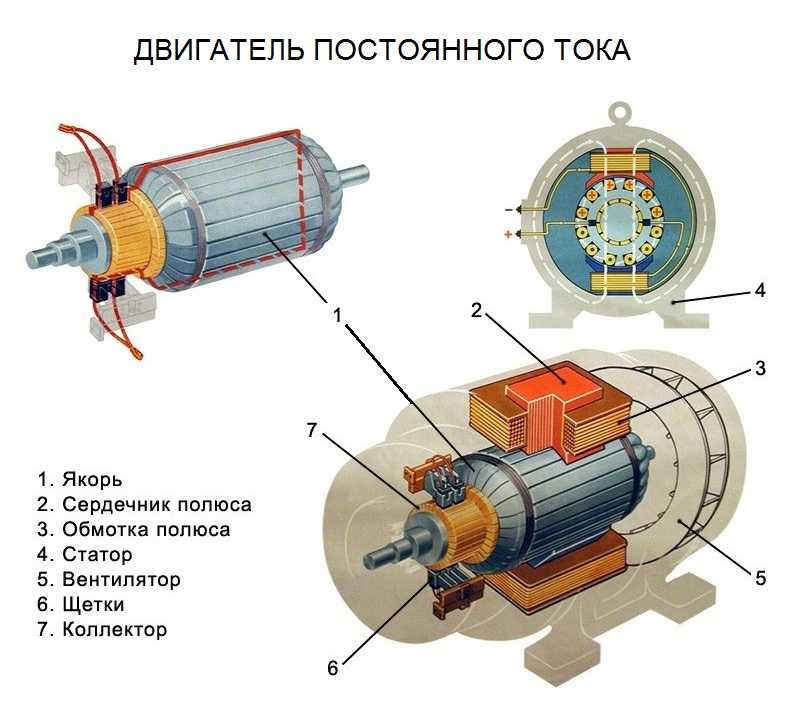
Электромотор лишился механически трущихся и искрящих узлов (щеток и коллектора), превзойдя по бесшумности и ресурсу любой другой существовавший в то время тип привода.
Независимо от конструкции, любой электродвигатель устроен одинаково: внутри цилиндрической проточки в неподвижной обмотке (статоре) вращается ротор, в котором возбуждается магнитное поле, приводящее к отталкиванию его полюсов от статора.
Поддержание постоянного отталкивания требует:
- перекоммутации обмоток ротора, как это делается на коллекторных электродвигателях;
- создания вращающегося магнитного поля в самом статоре (классический пример – асинхронный трехфазный двигатель).
Достоинства электродвигателей переоценить трудно. Это:
- Крайняя простота.
- Электродвигатель состоит из минимального количества узлов, поэтому ломаться в нем практически нечему.
- Самостоятельный запуск.
-
Электродвигателю не нужен пусковой импульс, он начинает вращаться сам при включении питания (исключение – однофазные электродвигатели с пусковой обмоткой, но они практически вышли из употребления).
 Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
- Отсутствие вибраций.
- Так как в электродвигателях энергия магнитного поля непосредственно преобразуется во вращение, при должной балансировке ротора они полностью бесшумны и не создают вибрации.
- Легкость управления оборотами и крутящим моментом.
- Несмотря на то, что на разных типах электродвигателей это достигается разными способами, управление ими в любом случае достаточно просто и надежно.
- Возможность реверса.
- На коллекторном двигателе достаточно поменять местами полюса якоря, на трехфазном электромоторе – изменить порядок включения фаз.
- Обратимость.
- Коллекторные электродвигатели при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.

Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Так как постоянный ток не способен создать изменяющееся магнитное поле, обеспечение непрерывного вращения ротора требует принудительной перекоммутации обмоток, или дискретного изменения направления магнитного поля.
Старейший из известных способов – это использование электромеханического коллектора. В этом случае якорь электродвигателя имеет несколько разнонаправленных обмоток, соединенных с находящимися в соответствующем положении относительно щеток ламелями коллектора.
В момент включения питания возникает импульс в обмотке, соединенной со щетками, после чего ротор проворачивается, и в том же месте относительно полюсов статора включается новая обмотка.
Так как намагниченность статора во время работы коллекторного электродвигателя постоянного тока не изменяется, вместо сердечника с обмотками могут использоваться мощные постоянные магниты, что сделает мотор компактнее и легче.
Коллекторный двигатель не лишен ряда недостатков. Это:
- высокий уровень помех, как передаваемых в питающую сеть при переключении обмоток якоря, так и возбуждаемых искрением щеток;
- неизбежный износ коллектора и щеток;
- повышенная шумность при работе.
Современная силовая электроника позволила избавиться от этих недостатков, применяя так называемый шаговый двигатель – в нем ротор имеет постоянную намагниченность, а внешнее устройство последовательно меняет направление тока в нескольких обмотках статора.
Фактически за единичный импульс тока ротор проворачивается на фиксированный угол (шаг), откуда и пошло название электромоторов такого типа.
Шаговые электродвигатели бесшумны, а также позволяют в широчайших пределах регулировать как крутящий момент (амплитудой импульсов), так и обороты (частотой), а также легко реверсируются изменением порядка следования сигналов.
По этой причине они широко используются в сервоприводах и автоматике, однако их максимальная мощность определяется возможностями силовой управляющей схемы, без которой шаговые двигатели неработоспособны.
© 2012-2023 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Какие существуют типы электродвигателей?
Электродвигатели бывают различных размеров и мощностей и производятся для различных применений. Существует два основных типа электродвигателей: двигатели переменного тока (переменного тока) и двигатели постоянного тока (постоянного тока). Они используются в большинстве приложений с электродвигателями и адаптированы к отрасли и требованиям продукта. Это может означать, что электродвигатель может быть щеточным, бесщеточным, синхронным или даже использовать постоянные магниты.
Двигатели переменного тока
Двигатели переменного тока используют переменный ток для преобразования электрической энергии в механическую. Им требуется только небольшая мощность при запуске, и они позволяют контролировать ускорение, что означает, что они могут поддерживать постоянную скорость и производительность. Именно эти особенности делают двигатели переменного тока идеальными для приложений, требующих стабильной работы, таких как конвейерные системы или кондиционеры. Эти виды использования не требуют постоянного изменения скорости, а это означает, что износ двигателя менее распространен. Соедините это с тем фактом, что двигатели переменного тока не имеют щеток, и вы обнаружите, что это очень прочный тип электродвигателя.
Им требуется только небольшая мощность при запуске, и они позволяют контролировать ускорение, что означает, что они могут поддерживать постоянную скорость и производительность. Именно эти особенности делают двигатели переменного тока идеальными для приложений, требующих стабильной работы, таких как конвейерные системы или кондиционеры. Эти виды использования не требуют постоянного изменения скорости, а это означает, что износ двигателя менее распространен. Соедините это с тем фактом, что двигатели переменного тока не имеют щеток, и вы обнаружите, что это очень прочный тип электродвигателя.
Типы двигателей переменного тока
Существует два основных типа двигателей переменного тока: синхронные и асинхронные. В синхронном двигателе переменного тока вращение ротора соответствует частоте питающего тока. Таким образом, скорость остается постоянной независимо от нагрузки, что делает его идеальным для высокоточных устройств позиционирования, таких как роботизированные решения.
Асинхронные двигатели являются наиболее распространенным типом двигателей переменного тока и могут использоваться во всем, от грузоподъемного оборудования до бытовой техники. Они также известны как асинхронные двигатели, потому что они используют электромагнитную индукцию от магнитного поля в обмотке статора, что создает ток в роторе.
Типы двигателей постоянного тока
Все двигатели постоянного тока используют постоянный ток, двигатели постоянного тока также имеют хорошее регулирование скорости и высокий пусковой момент. Это делает их идеальными для приложений с электродвигателями, которые должны перемещать более тяжелые грузы в различных условиях, например, системы стеклоочистителей для железнодорожной, морской и транспортной промышленности.
Двигатели постоянного тока используются в самых разных областях, от электробритв до автомобилей, и существует несколько различных типов двигателей постоянного тока для этих целей. Parvalux специализируется на нестандартных двигателях BLDC и PMDC.
Двигатели постоянного тока
Двигатели постоянного тока можно купить как щеточные электродвигатели или как бесщеточные (двигатели постоянного тока). Как уже говорилось, щеточный двигатель может потребовать большего обслуживания из-за износа щеток. Однако они часто используются в приложениях, требующих более дешевого решения, и популярны в промышленных условиях.
Бесщеточный электродвигатель, как правило, более эффективен, так как скорость не теряется из-за щеток, и поэтому он работает тише. Двигатели BLDC должны быть подключены к электронному регулятору скорости, чтобы ток мог течь к электромагнитам. Следовательно, они, как правило, более дорогие для покупки.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (двигатели с постоянными магнитами) — это еще один тип двигателей постоянного тока, которые обычно используются в здравоохранении и индустрии развлечений. Основное различие между этими и другими типами электродвигателей заключается в том, что магнитное поле создается в статоре с помощью неподвижных магнитов, а не в обмотках статора.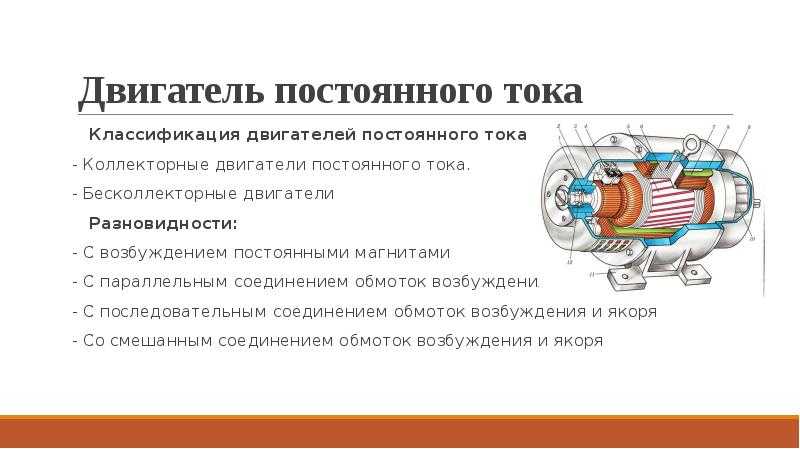
Двигатели постоянного тока с постоянным током обычно меньше других типов двигателей постоянного тока, что упрощает их транспортировку по всему миру и делает их более рентабельными. Это означает, что их можно найти во всех предметах повседневного обихода, включая детские игрушки и электрические зубные щетки.
Электродвигатель жизненно необходим для бесчисленного множества применений по всему миру. Независимо от того, выберете ли вы двигатель переменного или постоянного тока, всегда найдется решение, которое даст вам наилучшие результаты. Parvalux разрабатывает и производит электродвигатели, которые являются инновационными и долговечными, гарантируя, что продукты ваших клиентов всегда будут в движении. Узнайте больше об электродвигателях Parvalux, связавшись здесь: Ваше местное контактное лицо — Parvalux
Основы выбора двигателя: Типы двигателей переменного/постоянного тока
Какой тип электродвигателя вы выбираете для своего конвейера, стола XYZ или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) или постоянного тока (постоянного тока).
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации. Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы внутри этих категорий.
Помните, что некоторые производители могут предлагать как двигатели, так и драйверы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
| Двигатели переменного тока |
Двигатели переменного тока можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с пусковым конденсатором, с пусковым конденсатором/рабочим конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами с разделенным конденсатором, мы рассмотрим только двигатели PSC.
Каждый тип двигателя PSC похож по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Различные типы двигателей переменного тока «PSC»
|
Асинхронные двигатели / асинхронные двигатели
Асинхронные двигатели являются наиболее распространенными и рассчитаны на непрерывную работу. Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показаны конструкция и конструкция асинхронного двигателя.
|
① Фланцевый кронштейн |
Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре. На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
В этой записи блога можно найти дополнительную информацию об асинхронных двигателях переменного тока.
Асинхронные двигатели надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть выполнены за счет комбинации трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
|
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. |
 Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость, преодолев нестабильную область, и установится на «P» в стабильной области, где нагрузка и крутящий момент сбалансированы. Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость, преодолев нестабильную область, и установится на «P» в стабильной области, где нагрузка и крутящий момент сбалансированы. Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для операций пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками. Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.
|
В задней части реверсивного двигателя установлен фрикционный тормозной механизм. Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. |
|
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Двигатели с электромагнитным тормозом сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания. По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым отпуская тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Двигатели с электромагнитным тормозом используются в вертикальных приложениях, где необходимо удерживать груз, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели предназначены для обеспечения высокого пускового крутящего момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постоянно уменьшается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
|
Простая регулировка крутящего момента для натяжения
|
Синхронные двигатели
Синхронные двигатели называются «синхронными», поскольку они используют специальный ротор для синхронизации своей скорости с частотой входной мощности. Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы. Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут работать от источника переменного тока и обеспечивают превосходные характеристики пуска и остановки, их иногда называют «шаговыми двигателями переменного тока».
| Двигатели постоянного тока |
Двигатели постоянного тока используют постоянный ток для питания угольных щеток и коллектора или для электрической коммутации обмоток с драйвером. Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Электродвигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Различные типы двигателей постоянного тока
|
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри щеточного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания. Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются нескольких типов: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные. Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку компания Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и замкнутой обратной связи, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя. Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Узнайте больше о различиях между щеточными и бесщеточными двигателями
Бесщеточные двигатели и приводные системы часто сравнивают с двигателями переменного тока и системами с частотно-регулируемым приводом. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным типоразмером.
| Бесколлекторный двигатель + драйвер | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели имеют ряд преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Бесколлекторные двигатели Oriental Motor комплектуются собственными драйверами для обеспечения гарантированных технических характеристик и быстрой настройки. Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Преимущество бесщеточного двигателя (по сравнению с двигателями переменного тока)
| Преимущества по сравнению с щеточными двигателями | Преимуществапо сравнению с двигателями переменного тока |
|
|
Шаговые двигатели
С технической точки зрения бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для приложений позиционирования благодаря их превосходной способности останавливаться в точных местах. Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
| Зубчатый ротор и статор с постоянным магнитом | Двухфазный метод возбуждения (упрощенная схема) |
Точность остановки шагового двигателя обеспечивается зубчатым намагниченным ротором и зубчатым электромагнитным статором. Другими словами, вместо 4 полюсов в приведенном выше примере бесщеточного двигателя стандартный шаговый двигатель 1,8° имеет 50 полюсов с 50 зубьями.
Благодаря конструкции ротора и статора шаговый двигатель перемещается на четверть шага зуба за каждый прямоугольный импульс, получаемый его драйвером, а скорость регулируется входной частотой импульсов, поэтому очень легко контролировать пройденное расстояние и скорость. с помощью шагового двигателя. Шаговый двигатель также создает удерживающий момент в состоянии покоя, что важно для поддержания точности позиционирования.
Шаговых двигателей с разомкнутым контуром может быть достаточно для обычных приложений с повторяющимся позиционированием. Тем не менее, шаговые двигатели с обратной связью доступны для расширенных приложений позиционирования, требующих как точности, так и проверки положения.
|
Характеристики скорости и крутящего момента шагового двигателя
|
Кривая скорости и крутящего момента шагового двигателя обычно имеет нисходящий наклон; с самым высоким крутящим моментом, возникающим на низкой скорости, что означает, что его можно использовать для ускорения и замедления. В отличие от системы бесщеточного двигателя, шаговый двигатель не имеет области с ограниченным режимом работы. |
Если вы хотите узнать больше, я написал отдельные заметки о шаговых двигателях.
Узнайте о различиях между гибридными шаговыми двигателями, двигателями с постоянными магнитами и VR
Узнайте больше о различиях между серводвигателями и шаговыми двигателями
Совет по выбору двигателя: практическое правило (для всех двигателей) |
|
|

В этом сообщении блога представлено общее представление о многих типах двигателей переменного/постоянного тока, представленных на рынке. В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка. Очень важно найти поставщика двигателей, который может гарантировать качество работы, предоставлять экспертную поддержку для широкого спектра продуктов и поставлять его в разумно короткие сроки.
