Что такое ротор электродвигателя. Как устроены и работают синхронные и асинхронные электродвигатели. Чем отличаются синхронные двигатели от асинхронных. Какие преимущества и недостатки имеют разные типы электродвигателей.
Ротор — вращающаяся часть электродвигателя
Ротор является ключевым элементом любого электродвигателя. Это вращающаяся часть двигателя, которая преобразует электрическую энергию в механическую работу. Конструкция ротора во многом определяет характеристики и принцип действия электродвигателя.
В зависимости от типа двигателя, ротор может иметь различное устройство:
- В синхронных двигателях ротор представляет собой постоянный магнит или электромагнит
- В асинхронных двигателях используется так называемый короткозамкнутый ротор в виде «беличьей клетки»
- В коллекторных двигателях ротор содержит обмотку с выводами на коллектор
Рассмотрим подробнее устройство и принцип работы роторов в синхронных и асинхронных двигателях.
Устройство и принцип работы синхронного двигателя
Синхронный двигатель состоит из следующих основных частей:
- Статор с трехфазной обмоткой
- Ротор с обмоткой возбуждения или постоянными магнитами
- Контактные кольца для подачи тока в обмотку ротора (в двигателях с электромагнитным возбуждением)
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с магнитным полем ротора. При подаче трехфазного напряжения на обмотку статора создается вращающееся магнитное поле. Магнитное поле ротора, создаваемое постоянными магнитами или электромагнитами, взаимодействует с полем статора, что приводит к появлению вращающего момента.
Особенности работы асинхронного двигателя
Асинхронный двигатель имеет следующую конструкцию:
- Статор с трехфазной обмоткой
- Короткозамкнутый ротор типа «беличья клетка»
Принцип действия асинхронного двигателя основан на явлении электромагнитной индукции. Вращающееся магнитное поле статора наводит ЭДС в обмотке ротора. Взаимодействие индуцированных токов ротора с магнитным полем статора создает вращающий момент.
Главное отличие от синхронного двигателя — наличие скольжения, то есть отставания скорости вращения ротора от скорости вращения магнитного поля статора.
Основные отличия синхронных и асинхронных двигателей
Синхронные и асинхронные двигатели имеют ряд принципиальных различий:
- Конструкция ротора:
- Синхронный — с явно выраженными полюсами или постоянными магнитами
- Асинхронный — короткозамкнутый типа «беличья клетка»
- Скорость вращения:
- Синхронный — строго синхронна с частотой сети
- Асинхронный — меньше синхронной из-за скольжения
- Пусковые свойства:
- Синхронный — не имеет пускового момента, требует раскрутки
- Асинхронный — самозапускается при подаче напряжения
Преимущества синхронных электродвигателей
Синхронные двигатели обладают рядом достоинств:
- Высокий КПД (до 98-99%)
- Стабильная скорость вращения независимо от нагрузки
- Возможность работы с опережающим коэффициентом мощности
- Высокая перегрузочная способность
Благодаря этим качествам синхронные двигатели широко применяются в мощных приводах, где требуется точное поддержание скорости.

Достоинства асинхронных электродвигателей
Асинхронные двигатели имеют следующие преимущества:
- Простая и надежная конструкция
- Низкая стоимость
- Хорошие пусковые свойства
- Возможность прямого пуска от сети
- Высокая ремонтопригодность
Эти качества обусловили широкое распространение асинхронных двигателей в промышленности и быту.
Сравнение эффективности синхронных и асинхронных двигателей
При выборе типа электродвигателя важно учитывать эффективность его работы в конкретных условиях. Сравним КПД синхронных и асинхронных двигателей:
- Синхронные двигатели имеют более высокий КПД во всем диапазоне мощностей (на 1-2% выше)
- КПД синхронных двигателей мало зависит от нагрузки
- Асинхронные двигатели имеют максимальный КПД при нагрузке 70-80% от номинальной
- При малых мощностях (до 1 кВт) разница в КПД незначительна
Таким образом, синхронные двигатели более эффективны при больших мощностях и переменных нагрузках. Асинхронные двигатели оптимальны для маломощных приводов со стабильной нагрузкой.

Области применения разных типов электродвигателей
Синхронные и асинхронные двигатели имеют свои оптимальные сферы использования:
Синхронные двигатели применяются:
- В мощных промышленных приводах (компрессоры, насосы, вентиляторы)
- В генераторах электростанций
- В прецизионных приводах станков
- В тяговых двигателях электротранспорта
Асинхронные двигатели используются:
- В бытовой технике (стиральные машины, холодильники)
- В станочном оборудовании средней мощности
- В вентиляционных системах
- В подъемно-транспортных механизмах
Выбор типа двигателя определяется требованиями к приводу и экономической целесообразностью.
Чем отличается синхронный двигатель от асинхронного для чайников кратко, простыми словами, сравнение по конструкции и принципу действия
Электрический двигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую. Конструктивно агрегат состоит из статора (фиксирован) и ротора (вращается). Первый создает магнитный поток, а второй крутится под действием электродвижущей силы (ЭДС).
Отличие – кратко простыми словами
Если говорить кратко и простыми словами, синхронный и асинхронный двигателя отличаются конструкцией роторов. Внешне понять какой перед вам электродвигатель практически невозможно, за исключением наличия дополнительных ребер охлаждения у асинхронных электродвигателях.
В устройстве, работающем на синхронном принципе, на роторе предусмотрена обмотка с независимой подачей напряжения.
У асинхронного мотора ток на ротор не подается, а формируется с помощью магнитного статорного поля. При этом статоры обоих агрегатов идентичны по конструкции и несут аналогичную функцию — создание магнитного поля.
Дополнительно в синхронном двигателе магнитные поля статора и ротора взаимодействуют друг с другом и имеют равную скорость.
У асинхронных агрегатов в роторных пазах имеются короткозамкнутые пластинки из металла или контактные кольца, обеспечивающие разность магнитного поля роторного и статорного механизма на величину скольжения.
Несмотря на видимую простоту, разобраться с этим вопросом сразу вряд ли получится, поэтому рассмотрим вопрос более подробно. Поговорим об особенностях и отличиях асинхронных и синхронных машин.
Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм). Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
Конструктивно роторы бывают разными устройством и по конструкции.
В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно.
 Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.
Принцип работы
Сначала к обмоткам возбуждения подводится ток постоянно величины. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.
С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
Сфера применения
Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т.
 д.
д.
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь эля этого нужные специальные устройства: возбудитель, выпрямитель.

- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.
Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000ВАсинхронный двигатель (АД)
Асинхронный (индукционный) электродвигатель, имеющий разную частоту вращения магнитного поля в статоре и скорости ротора. В зависимости от типа и настройки может работать в двигательном или генераторном режиме, режиме ХХ или электромагнитного тормоза.
Конструктивные особенности
Конструктивно асинхронные механизмы трудно отличить от синхронных. Они также состоят из двух основных узлов: статора и ротора. При этом роторный узел может быть фазным или короткозамкнутым. Но небольшие конструктивные отличия все-таки имеются.
Рассмотрим, из чего состоит асинхронный двигатель:
- сердечник;
- вентилятор с корпусом;
- подшипник;
- коробка с клеммами;
- тройная обмотка;
- контактные кольца.
С учетом сказанного одним из главных отличий является отсутствие обмоток на якоре (исключением являются фазные АД). Вместо обмотки в роторе находятся стержни, закороченные между собой.
Принцип действия
В асинхронном двигателе магнитное поле создается, благодаря току в статорной обмотке, находящейся на специальных пазах. На роторе, как отмечалось выше, обмоток нет, а вместо них накоротко объединенные стержни. Такая особенность характерна для короткозамкнутого роторного механизма.
Во втором типе ротора (фазном) на роторе предусмотрены обмотки, ток и сопротивление которых могут регулироваться реостатным узлом.
Простыми словами, принцип действия можно разложить на несколько составляющих:
- При подаче напряжения в статоре создается магнитное поле.
- В роторе появляется ток, взаимодействующий с ЭДС статора.
- Роторный механизм вращается в том же направлении, но с отставанием (скольжением) размером от 1 до 8 процентов.
Сфера применения
Асинхронные электромоторы пользуются большим спросом в быту, благодаря простоте конструкции и надежности в эксплуатации.
Они часто применяются в бытовой аппаратуре:
- стиральных машинках;
- вентиляторе;
- вытяжке;
- бетономешалках;
- газонокосилках и т. д.
Также применяются они и в производстве, где подключаются к 3-фазной сети.
К этой категории относятся следующие механизмы:
- компрессоры;
- вентиляция;
- насосы;
- задвижки автоматического типа;
- краны и лебедки;
- станки для обработки дерева и т. д.
Асинхронные машины применяются в электрическом транспорте и других сферах. Они нашли применение в башенных кранах, лифтах и т. д.
Пример Трехфазный АИР 315S2 660В 160кВт 3000об/мин.
Трехфазный АИР 315S2 660В 160кВт 3000об/минПреимущества и недостатки
Электродвигатель асинхронного тип имеет слабые и сильные места, о которых необходимо помнить.
Преимущества:
- Простая конструкция, которая обусловлена трехфазной схемой подключения и простым принципом действия.
- Более низкая стоимость, по сравнению с синхронным аналогом.
- Возможность прямого пуска.
- Низкое потребление энергии, что делает двигатель более экономичным.
- Высокая степень надежности, благодаря упрощенной конструкции.
- Универсальность и возможность применения в сферах, где нет необходимости в поддержке частоты вращения, или имеет место схема управления с обратной связью.
- Возможность применения при подключении к одной фазе.
- Успешный самозапуск группы АД в случае потери и последующей подачи на них напряжения.
- Минимальные расходы на эксплуатацию. Все, что требуется — периодически чистить механизма от пыли и протягивать контактные соединения. При соблюдении требований производителей менять подшипники можно с периодичностью раз в 15-20 лет.
Недостатки:
- Наличие эффекта скольжения, обеспечивающего отставание вращения ротора от частоты вращения поля внутри механизма.
- Потери на тепло. Асинхронные моторы имеют свойство перегреваться, особенно при большой нагрузке. По этой причине корпус изделия делают ребристым для увеличения площади охлаждения (у СД такое применяется не на всех моделях). Дополнительно может устанавливаться вентилятор для обдува поверхности.
- Напряжение только на 220 В и выше. Из-за конструктивных особенностей такие электродвигатели не производятся для рабочего напряжения меньше 220 В. В качестве замены часто применяются гидро- или пневмоприводы.
- Небольшой КПД в момент пуска и высокая реактивность. По этой причине мотор может перегреваться уже при пуске. Это ограничивает количество пусков в определенный временной промежуток.
- Синхронная частота вращения не может быть больше 3000 об/мин, ведь в ином случае требуется использование турбированного привода или повышающего редуктора.
- Трудности регулирования устройств, которые приводятся в движение «синхронниками».
- Повышенный пусковой ток — одна из главных проблем асинхронных моторов, имеющих мощность свыше 10 кВт.
 В момент пуска токовая нагрузка может превышать номинальную в шесть-восемь раз и длиться до 5-10 секунд. По этой причине для «асинхронников» не рекомендуется прямое подключение.
В момент пуска токовая нагрузка может превышать номинальную в шесть-восемь раз и длиться до 5-10 секунд. По этой причине для «асинхронников» не рекомендуется прямое подключение. - При появлении КЗ возле шин с работающим двигателем появляется подпитка тока.
- Чувствительность к изменениям напряжения. При отклонении этого параметра более, чем на 5% показатели электродвигателя отклоняются от номинальных. В случае снижения напряжения уменьшается момент АД.
Сравнение синхронного и асинхронного двигателей
В завершение можно подвести итог, в чем главные отличия асинхронных (АД) и синхронных (СД) моторов.
Выделим базовые моменты:
- Ротору асинхронных моторов не требуется питание по току, а индукция на полюсах зависит от статорного магнитного поля.
- Обороты АД под нагрузкой отстают на 1-8% от скорости вращения поля статора. В СД количество оборотов одинаково.
- В «синхроннике» предусмотрена обмотка возбуждения.
- Конструктивно ротор СД представляет собой магнит: постоянный, электрический.
 У АД магнитное поле в роторном механизме наводится с помощью индукции.
У АД магнитное поле в роторном механизме наводится с помощью индукции. - У синхронной машины нет пускового момента, поэтому для достижения синхронизации нужен асинхронный пуск.
- «Синхронники» применяются в случаях, когда необходимо обеспечить непрерывность производственного процесса и нет необходимости частого перезапуска. АД нужны там, где требуется большой пусковой момент и имеют место частые остановки.
- СД нуждается в дополнительном источнике тока.
- «Асинхронники» медленнее изнашиваются, ведь в их конструкции нет контактных колец со щетками.
- Для АД, как правило, характерно не круглое количество оборотов, а для СД — округленное.
Про реактивную мощность
Синхронные электродвигатели генерируют и одновременно потребляют реактивную мощность. Особенности и параметры «реактива» зависит от тока в возбуждающей обмотке. При полной нагрузке косинус Фи равен 1. В таком режим СД не потребляет «реактив» из сети, а ток в статорной обмотке минимален.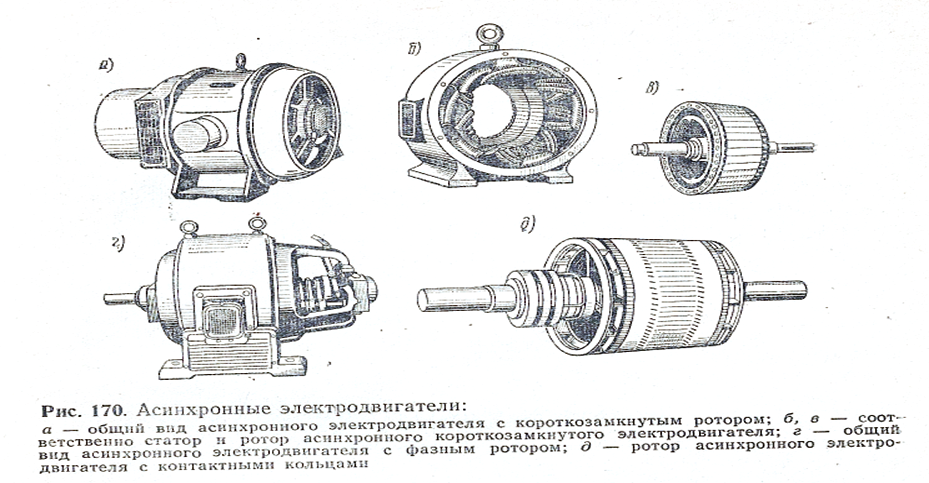
Здесь важно понимать, что реактивная мощность ухудшает параметры энергосистемы. Большой параметр неактивных токов приводит к повышению расхода топлива, увеличению потерь и снижению напряжения.
Кроме того, «реактив» грузит линии передач электроэнергии, что ведет к необходимости увеличения сечения кабелей и проводов, а, соответственно, повышению капитальных расходов.
Сегодня одна из главных задач энергетиков — компенсация реактивной мощности. К основным ее потребителям относят АД, потребляющие 40% «реактива», электрические печи, преобразователи, ЛЭП и силовые трансформаторы.
Какой лучше
При сравнении асинхронного и синхронного электродвигателей трудно ответить, какой лучше. По конструкции и надежности выигрывает АД, который при умеренной нагрузке имеет более продолжительный срок службы. У СД щетки быстро изнашиваются, что требует их замены.
В остальном это два схожих по конструкции, но отличающихся по принципу действия механизма, имеющих индивидуальные сферы применения.
Появление электродвигателей переменного тока — Control Engineering Russia
АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
В предыдущих статьях [1, 2] описывались первые электрические двигатели с питанием от гальванических батарей. Однако во второй половине XIX века в связи с развитием электрического освещения и дальней передачи электроэнергии появились сети однофазного переменного тока [3]. Это и дало толчок к изобретению электродвигателей переменного тока.
Рис. 1. Двигатель Уитстона
Первый однофазный двигатель был предложен в 1841 г. английским физиком Чарльзом Уитстоном (Charles Wheatstone), известным также своими изобретениями в области электрогенераторов и измерительной техники. Такой двигатель подключается к источнику переменного тока и содержит (рис. 1) статор с шестью электромагнитами (1) и ротор (2) в виде медного диска с тремя подковообразными магнитами (3) полярностью N и S.
Все электромагниты включены последовательно так, что при любой полярности питающего напряжения в промежутках между ними формируются магнитные потоки или полюса чередующейся полярности n и s, показанные на рис. 1 в начальный момент времени t1 для положительного полупериода питающего напряжения. Предположим, что ротор вращается против часовой стрелки, и рассмотрим силы, действующие на верхний магнит ротора (аналогично работают и остальные магниты). Поскольку разноименные полюса магнитов притягиваются, а одноименные отталкиваются, вращающий момент ротора будет направлен против часовой стрелки, поддерживая его вращение. Если ротор двигателя успеет за полупериод напряжения повернуться на 60°, то в следующий полупериод все полюса статора поменяют полярность и ротор повернется еще на 60°. Таким образом, ротор будет поворачиваться синхронно с частотой перемагничивания электромагнитов (частотой сети), отчего подобные двигатели по предложению Чарльза Штейнмеца и получили название синхронных.
Рис. 2. Векторная диаграмма двигателя
Магнитное поле статора такого двигателя можно изобразить в виде вектора (рис. 2), где Ф1, Ф2,… Ф6 — магнитные потоки статора, взаимодействующие с ротором в последовательные моменты времени t1, t2, … t6, когда питающее напряжение меняет свой знак. Получается, что вектор магнитного потока статора шагает по окружности синхронно с ротором, поэтому такое магнитное поле можно назвать шагающим.
При реальных частотах сети 50–60 Гц такой двигатель, конечно, запуститься не сможет, но если его ротор раскрутить, например, вручную или другим двигателем до синхронной скорости, то он будет устойчиво работать с частотой вращения, пропорциональной частоте сети. При электрификации Лондона посредством однофазного напряжения в 1889 г. в качестве такого «раскруточного» двигателя применили так называемый универсальный двигатель (рис. 3) с обмотками якоря (1) и возбуждения (2). Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
Рис. 3. Универсальный двигатель
Универсальные двигатели до сих пор широко применяются при мощности до нескольких киловатт, особенно в бытовой технике. Они привлекают производителей легкостью изменения скорости с помощью регулирования напряжения, как в обычном двигателе постоянного тока. Однако для мощных приводов такое регулирование было в то время затруднительным. Поэтому для электрической тяги на железных дорогах и в лифтах с питанием от сети переменного тока стали применять так называемый репульсионный двигатель, изобретенный в 1885 г. знаменитым американским электротехником Илайю Томсоном (Elihu Thomson) и усовершенствованный позднее Микша Дери [3, 5, 6].
Рис. 4. Репульсионный двигатель
Илайю Томсон (1853–1937), родом из Англии, соединял в себе таланты блестящего университетского профессора, крупного инженера, плодовитого изобретателя (696 патентов) и успешного предпринимателя [7].
По конструкции репульсионный двигатель, схема которого показана на рис. 4, похож на универсальный двигатель с якорем (1) и возбуждением в виде электромагнита (2). Отличие состоит в том, что щетки двигателя (3) закорочены и могут вручную поворачиваться [8]. При питании переменным напряжением в закороченной обмотке якоря наводится ЭДС и идет ток, направление которого, в соответствии с законом Ленца, таково, что создаваемый им поток противодействует магнитному потоку статора.
Тогда, если в некоторый полупериод питающего напряжения электромагнит (2) имеет полюс  4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
Тем не менее проблемы всех коллекторных двигателей, связанные с искрением, помехами и быстрым износом, были решены лишь после создания асинхронного двигателя. По своему устройству он гораздо проще любого двигателя постоянного тока, поэтому удивительно, что он был изобретен почти на полстолетия позже, несмотря на то, что, как отмечал Илайю Томсон: «Трудно составить такую комбинацию из магнитов переменного тока и кусков меди, которая не имела бы тенденции к вращению» [5].
Рис. 5. Галилео Феррарис (1847–1897)
Асинхронный двигатель базируется на концепции вращающегося магнитного поля, выдвинутой практически одновременно в середине 1880-х гг. двумя выдающимися учеными — Николой Теслой [3] и итальянским профессором физики Галилео Феррарисом (Galileo Ferraris) (рис. 5). Последний родился на севере Италии в семье фармацевта и после окончания Туринского университета стал профессором Музея индустрии, где изучал трансформаторы, многофазные цепи, линии передачи переменного тока, а также оптические приборы. Он прожил короткую жизнь, но успел заслужить в Европе звание «отца трехфазного тока» [5, 9, 10].
Если вернуться к концепции, то во вращающемся магнитном поле вектор магнитного потока статора постоянен по величине, но, в отличие от шагающего поля (рис. 2), непрерывно (равномерно) вращается с синхронной скоростью. Тогда очевидно, что ротор в виде магнита, помещенный внутри такого поля, будет вовлекаться им в синхронное вращение, что и происходит в рассмотренном выше двигателе Уитстона. Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Рис. 6. Опыт Араго
Диск (1) из меди или стали на стеклянной пластине (2) вращался в том же направлении, что и вращающийся магнит (3). Объяснение этому загадочному явлению нашел Майкл Фарадей в 1831 г. после открытия закона электромагнитной индукции (закона Фарадея). Согласно ему, вращающееся магнитное поле магнита индуцирует в диске вихревые токи, создающие собственное магнитное поле, взаимодействующее с вращающимся.
Рис. 7. Опыт Бейли
Этот принцип и лежит в основе современных асинхронных двигателей (в английской литературе — индукционных), имеющих металлический ротор и отличающихся только тем, что в них вращающееся магнитное поле образуется неподвижной обмоткой статора. Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
На этот вопрос ответил вышеупомянутый Феррарис в 1888 г. в докладе Туринской академии наук, математически сформулировав два условия [5, 10]:
- Обмотка двигателя должна содержать две независимые части (называемые теперь фазами), магнитные потоки которых геометрически взаимно перпендикулярны.
- Фазы должны быть запитаны двумя гармоническими напряжениями, сдвинутыми на четверть периода (синус и косинус).
Позднее Михаил Осипович Доливо-Добровольский предложил называть такую систему токов Drehstrom, что в дословном переводе с немецкого означает «вращательный ток» [6].
Рис. 8. Двухфазный двигатель Феррариса
Свою теорию Феррарис блестяще подтвердил макетом двигателя мощностью 3 Вт (рис. 8), имеющего ротор (1) в виде полого медного стаканчика и статор (2) с фазами A и B. Фазы разделены на две секции с разным числом витков, намотанных проводом разного диаметра так, чтобы создавать индуктивный сдвиг фаз токов в 90° при питании от однофазной сети.
В 1890 г. французские инженеры Морис Хитин (Maurice Hutin) и Морис Леблан (Maurice Leblanc) предложили использовать для сдвига фаз токов конденсатор [6]. В таком виде двухфазный двигатель дожил до наших дней под названием конденсаторного двигателя. При этом габариты конденсатора соизмеримы с размерами самого двигателя, поэтому данное техническое решение пригодно только для маломощных двигателей.
Сам Феррарис также заявлял, что «…аппарат, основанный на исследованном нами принципе, не может иметь никакого промышленного значения как двигатель» [10]. Поэтому он его не запатентовал (как, впрочем, и остальные свои открытия) и отклонил, в отличие от Теслы, предложение Вестингауза о сотрудничестве. Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Рис. 9. Двигатель Теслы
Совершенно по другому пути пошел Тесла, предложив в 1887 г. многофазные системы, где сдвинутые напряжения питания фаз вырабатывались питающим генератором, как показано, например, на рис. 9, где: 1 — генератор, 2 — двухфазный двигатель, 3 — контактные кольца генератора, 4 — обмотка ротора (кольца двигателя не показаны) [5, 10].
При положении переключателя ON ротор запитывается постоянным напряжением, и это двухфазный синхронный двигатель с электромагнитным возбуждением. В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
Рис. 10. Макет двигателя Теслы
Двигатели Теслы и Феррариса легко запускались от питающей сети, однако с увеличением нагрузки их скорость падала, что подтверждается принципиальным отличием асинхронного двигателя от синхронного. Действительно, асинхронный двигатель развивает вращающий момент лишь при наличии тока, а следовательно, и ЭДС, индуцируемой в роторе. А, по закону Фарадея, это возможно лишь тогда, когда ротор пересекает силовые линии поля статора, т. е. когда скорости их вращения не одинаковы (не синхронны).
Как описано в статье [3], Тесла вместе с Вестингаузом начали активно внедрять асинхронные двигатели в жизнь, однако они были доведены до совершенства и приняли современный вид лишь благодаря трудам нашего соотечественника Михаила Осиповича Доливо-Добровольского, которые будут рассмотрены в следующих статьях.
Что касается многофазных синхронных двигателей, то они нашли широкое применение там, где требуется стабильная скорость вращения, например в компрессорах, приводах генераторов и т. д. Синхронные двигатели с постоянными магнитами входят в состав современных вентильных двигателей, создающих все большую конкуренцию пока еще наиболее распространенным электродвигателям постоянного тока.
-
Потребность в двигателях переменного тока возникла при внедрении однофазных осветительных сетей. Первым стал синхронный двигатель Уитстона с постоянными магнитами (1841 г.).
-
Однако такие двигатели не имели пускового момента, поэтому на практике применялись универсальные двигатели Сименса и репульсионные двигатели Томсона (1884-5 гг).
-
Достаточно мощные двигатели для промышленности были созданы только в середине 1880-х гг., после того как концепция вращающегося магнитного поля была математически сформулирована Феррарисом и реализована в многофазных синхронных и асинхронных двигателях Теслы, запущенных в производство на заводах Вестингауза.
Вконтакте
Google+
Электрические двигатели в автомобиле | Автомобильный справочник
Электрические двигатели в автомобиле — это электрические машины (электромеханические преобразователи), в которых электрическая энергия преобразуется в механическую. В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Вот о том, что представляют собой электрические двигатели, мы и поговорим в этой статье.
Систематика роторных электрических машин
Электрические двигатели в автомобиле являются электро-магнето-механическими преобразователями энергии. При энергии Wm, имеющейся в магнитном поле, разряд, согласно углу вращения γ, создает магнитную силу Ft:
Ft = δ Wm / δ γ
Она служит тангенциальной силой для создания крутящего момента, вычисляемого по радиусу ротора r (рис. «Принцип работы роторных электрических машин» ). Это можно описать выражением:
«Принцип работы роторных электрических машин» ). Это можно описать выражением:
М = Ft r.
Электрические машины можно поделить на категории по их управлению (табл. «Систематический подход к электрическим двигателям»). Часть этой систематизации взята из стандарта DIN 42027.
Двигатели постоянного тока
Для работы в качестве двигателей часто выбираются двигатели постоянного тока. Они используются, например, в качестве приводов для электрических топливных насосов, вентиляторных электродвигателей, пусковых электродвигателей, электродвигателей стеклоочистителей ветрового стекла и стеклоподъемников.
Двигатель постоянного тока (рис. «Структура двухполюсного эектродвигателя переменного тока» ) состоит из статора с возбуждающей, компенсирующей и коллекторной обмотками, а также ротора (якоря) с роторной обмоткой. Ротор запитывается через коллекторные щетки и коллекторные пластины. Обмотки можно соединять параллельно или последовательно.
Обмотки можно соединять параллельно или последовательно.
Двигатели постоянного тока классифицируются по различным характеристикам (с последовательным или параллельным возбуждением). Приведенные вычисления относятся к самокоммутирующимся двигателям. Схемы соединений двигателей постоянного тока регламентируются стандартом DIN EN 60034, часть 8.
Коммутация в двигателе постоянного тока
Для работы двигателя постоянного тока необходимо, чтобы направление тока в роторе оставалось постоянным относительно полюсов статора (рис. «Принцип коммутации тока» ). Процесс изменения направления тока в роторе происходит в нейтральной зоне и называется коммутацией. Коммутатор получает ток IR через коллекторные щетки. Он делится на токи ветвей Izw. Напряжение, наводимое в обмотках, вычисляется по формуле:
u = -L di / dt
Тангенциальная скорость vt поверхности коллектора:
vt = ω dc / 2
Для определения длительности цикла Тс учитывается количество коллекторных пластин:
Тс = πdc / vt K
Изменение тока в коллекторной обмотке происходит за время Тс. Если учесть, что имеет место лишь ток Izw, то для наведенного напряжения применяется следующее:
Если учесть, что имеет место лишь ток Izw, то для наведенного напряжения применяется следующее:
u = -L (Izw vt K / πdc)
Обозначения берутся из DIN 1304. часть 7.
Коммутирующая и компенсирующая обмотки
Распределение поля
Главное поле, беспрепятственно проникающее в ротор при отсутствии тока, имеет симметричное распределение (рис. а, «Наложение полей» ). Аналогично, имеется симметричное разделение потока, когда ток подается только на ротор (рис. Ь, «Наложение полей» ).
При наложении этих полей нейтральная зона отклоняется на угол β (рис. с, «Наложение полей» ). Таким образом, эта магнитно-нейтральная зона больше не соответствует геометрически нейтральной зоне (положение коллекторных щеток).
В геометрически нейтральной зоне это создает магнитное поле, которое в процессе коммутации наводит напряжение в обмотке ротора, вызывая искрение между щеткой и движущейся коллекторной пластиной. Во избежание этого в процессе коммутации в этой обмотке наводится другое напряжение, где амплитуда и направление компенсируют эффект изначально наведенного напряжения. Это достигается с помощью коммутирующей обмотки (рис. «Структура двухполюсного электродвигателя переменного тока» ). Коммутирующая обмотка последовательно подключается к обмотке ротора. Она использует обратную реакцию ротора для противодействия смещению в магнитно-нейтральной зоне.
В случае с двигателями без коммутирующей обмотки щетки нужно смещать в магнитно-нейтральную зону. Возмущение основного поля, возникающее в области полюсного башмака, ведет к снижению доступной поверхности клеммы вкупе с ростом магнитного сопротивления. Вот почему у более крупных двигателей имеется компенсирующая обмотка, встроенная как полюсный башмак (рис. «Структура двухполюсного электродвигателя переменного тока» ). Компенсирующая обмотка последовательно соединяется с обмоткой ротора, и ее размеры таковы, чтобы компенсировать поперечное поле ротора.
Эффект коммутирующей и компенсирующей обмоток
Последовательность изображений на рис. «Эффект компенсирующей и коммутирующей обмоток» описывает эффект обеих обмоток. Показаны распределения полей в воздушном зазоре. Расположение полюсов с обмоткой и нейтральной зоной показано на рис. а. Распределение поля возбуждения ВE(х) под полюсным башмаком, а также полюсное деление τР показаны на рис. Ь. На рис. с показано распределение поперечного поля ротора Br(x). Наложение обоих распределений полей можно увидеть на рис. d. Компенсирующая индукция Bk(x) (рис.5е) и наложение из рис. d показаны на рис. f. Если коммутирующая индукция Bw(x) на рис. g накладывается на распределение поля из рис. f, то получаем желаемое распределение поля согласно рис. h.
h.
Расчет тангенциальной силы ротора
Для создания крутящего момента на роторе необходима тангенциальная сила. Объекты исследования — статор и ротор с канавкой (рис. «Расположение статора и ротора» ), в которой находится токоведущий проводник (прядь обмотки). Ротор перемещается из положения 1 в положение 2. Поток статора Фs создает индукцию Bs в воздушном зазоре, а проводник в роторе, через который протекает ток, вызывает индукцию ВR. С левой стороны канавки образуется деструктивное, а с правой стороны — конструктивное наложение этих двух индукций. Энергия, накопленная в воздушном зазоре с левой стороны канавки, равна:
dW2 = (δIL/2μ0) (Bs2-BR2)dx (уравнение 1).
С правой стороны канавки она равна:
dW1 = (δIL/2μ0) (Bs2+BR2)dx (уравнение 2).
Работа dW, выполняемая в этой части, получается из разности между энергиями dW1 и dW2:
dW = dW1- dW2 = Ft dx (уравнение 3).
Уравнения 1, 2 и 3 можно использовать для вычисления силы Ft. Это можно описать выражением:
Ft dx = (lRδ/2μ0) [(Bs2-BR2)-(Bs2+ BR2)]dx.
Это значит, что:
Ft = (lRδ/2μ0) BR2
Магнитно-эффективная длина ротора равна lR. Сила Ft — это квадратичная функция индукции провода, по которому протекает ток. Влияния индукции статора компенсируют друг друга. Поскольку силы на пограничных слоях всегда воздействуют в направлении низкой проницаемости, то они влияют на крутящий момент из-за потоков, возникающих по бокам от канавки.
Электродвигатель параллельного возбуждения
Особенностью электродвигателя параллельного возбуждения является то, что обмотка ротора параллельно соединяется с обмоткой возбуждения. Для электродвигателя параллельного возбуждения действуют следующие условия подключения (рис. «Обозначение подключений электродвигателя с параллельным возбуждением» ):
- А — обмотка ротора:
- А — коммутирующая обмотка;
- С — Компенсирующая обмотка;
- Е — обмотка возбуждения.
Расчет электродвигателя параллельного возбуждения базируется на сопротивлении ротора RA и напряжении, наводимом обмоткой ротора. Напряжение на клеммах UKl составляется из напряжения ротора UA = IА RA и наведенного напряжения Uind = c1 n ФS:
UKl = IА RA + c1 n ФS (уравнение 4).
Здесь с1 обозначает конструктивно определяемую константу двигателя, зависящую от количества катушек в обмотке ротора, n — частота вращения, ФS — поток статора, IА — ток ротора.
Решение уравнения 4 для n дает скорость вращения (уравнение частоты вращения — тока ротора):
n = (- RA /c1ФS) IА + UKl /c1ФS (уравнение 5).
Если момент двигателя Мм = с2ФS IАвставить в уравнение частоты вращения — тока ротора (уравнение 5), то получим уравнение частоты вращения — крутящего момента
n = (- RA /c1·с2·ФS2) Мм + UKl /c1·ФS (уравнение 6).
с2 — это тоже конструктивно определяемая константа двигателя, зависящая от количества катушек в обмотке ротора.
На рис. «Зависимость частоты вращения от крутящего момента электродвигателя с параллельным возбуждением» показаны рабочие характеристики электродвигателя параллельного возбуждения. Для преодоления трения двигатель должен развивать фрикционный момент MR. В момент включения частота вращения равна нулю. Это позволяет вычислить пусковой момент
MA = UKl c2ФS /RA
в уравнении 6. При теоретически самой высокой частоте вращения на характеристической кривой (холостые обороты), двигатель не развивает крутящий момент. Холостые обороты n0 равны
n0 = UKl /c1ФS
Электродвигатель с последовательным возбуждением
У электродвигателя с последовательным возбуждением коммутирующая, компенсирующая, возбуждающая обмотки статора и обмотка ротора соединяются последовательно (рис. «Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
«Обозначение подключений электродвигателя с последовательным возбуждением» ). D обозначает обмотку возбуждения электродвигателя с последовательным возбуждением. Чтобы определить рабочие характеристики, суммируем сопротивления обмоток, и получаем сопротивление RA.
Точно таким же образом, как и в случае с электродвигателем параллельного возбуждения, напряжение на клеммах UKL складывается из напряжения ротора и наведенного напряжения:
UKl = IА RA + c1 n ФS (уравнение 7).
В результате получаем уравнение скорости вращения:
n = (- RA /c1Ф) IА + UKl /c1ФS (уравнение 8).
Магнитный поток можно вычислить с помощью другой константы двигателя с3:
Ф = с3 IА (уравнение 9).
Константа двигателя с3 имеет единицу индуктивности и поэтому зависит от геометрии, количества катушек и проницаемости. Крутящий момент двигателя Мм вычисляется по формуле
Мм = с2с3IА2 (уравнение 10).
Если уравнение 10 скорректировать согласно IА, это выражение будет действительно в уравнении 9 и оно, в свою очередь, в уравнении частоты вращения — тока (уравнение 8). В результате получаем:
n = (- RA/c1·с3) + (UKl √с2·с3/с1·с3) (1/√Мм ) (уравнение 11).
В отличие от электродвигателя с параллельным возбуждением, здесь частота вращения пропорциональна соответствующему значению корня крутящего момента (рис. «Зависимость частоты вращения от крутящего момента электродвигателя с последовательным возбуждением» ). Двигатель характеризуется значительным падением частоты вращения при малой нагрузке. Если внешняя нагрузка на двигатель будет равна нулю, то частота вращения теоретически будет стремиться к бесконечности.
«Зависимость частоты вращения от крутящего момента электродвигателя с последовательным возбуждением» ). Двигатель характеризуется значительным падением частоты вращения при малой нагрузке. Если внешняя нагрузка на двигатель будет равна нулю, то частота вращения теоретически будет стремиться к бесконечности.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Типы электродвигателей. Какие бывают электродвигатели
Современный мир сложно представить без электродвигателей. Экологичные, эффективные, компактные моторы устанавливают в автомобильный и железнодорожный транспорт, станки, бытовое и промышленное оборудование, инструмент. При выборе модели электродвигателя учитывают конструктивные особенности, от которых зависят мощностные характеристики электропривода, уровень производимого шума, эксплуатационные характеристики.
Что такое электродвигатель
По сути, это машина, преобразующая электрическую энергию в механическую. Происходит вращение электрического контура в магнитном поле под силой магнитной индукции. Из определения понятно, что в каждом из двигателей имеется:
Происходит вращение электрического контура в магнитном поле под силой магнитной индукции. Из определения понятно, что в каждом из двигателей имеется:
- неподвижный элемент, называемый статором, он создаёт электромагнитное поле;
- подвижная конструкция (ротор) – это рамка или катушка, на которую действует вращательный момент магнитного поля.
Движение ротора относительно статора бывает:
- линейным, вернее, возвратно-поступательным, в этом случае ротор и статор располагаются в одной плоскости;
- вращательным, механическое усилие можно измерить числом оборотов в минуту.
Имея одинаковый принцип преобразования энергии, электродвигатели различаются строением роторной и статорной части, способу создания электромагнитного поля.
Какие бывают электродвигатели
Все электроприводы классифицируют на две основные группы по типу электропитания: работающие от постоянного и переменного тока:
- Двигатели постоянного тока устанавливаются на транспорт, буровые установки, грузовые подъёмники, пассажирские лифты, электроинструмент, станки, экскаваторы, другую спецтехнику, где необходимо регулировать скорость вращения приводного вала в большом диапазоне. Моторы отличаются высоким КПД, большой мощностью, нагружаемостью, обычно оснащаются электроникой для управления.
- Двигатели переменного тока считаются универсальными, по конструкции проще, чем электродвигатели постоянного тока, надёжны, неприхотливы. В бытовой и промышленной технике, где постоянная нагрузка, устанавливают практичные приводы переменного тока.
Наибольшей популярностью пользуются приводы, подключаемые к стандартной электросети.
Двигатели постоянного тока
Классифицируются по типу коллекторно-щеточного узла и характеру возбуждения.
- В коллекторных переключение полярности обмоток осуществляется специальным механизмом с контактными щётками, которые быстро изнашиваются, перегреваются, обгорают. К тому же при использовании щёточных контактов возникают искры и электропомехи.
- В бесколлекторных происходит самосинхронизация частотности крутящего момента, электродвигатели более экономичные, в них нет щёточных контактов.
- При независимом возбуждении контакты обмотки подключаются к аккумулятору или выпрямителю. Скорость вращения рамки регулируется реостатом, вмонтированным в обмотки возбуждения. Двигатели рассчитаны на небольшую нагрузку, при резком снижении сопротивления выходят из строя.
- Параллельное подключение ротора и обмотки, возбуждающей электромагнитное поле, практикуется в приводах с жёсткими режимами эксплуатации за счёт разницы силы тока в обмотке и якоре. Двигатель подключают к вентиляторам, продолжительно работающим станкам.
- Двигатели с последовательным возбуждением рекомендуются для электротранспорта. Электродвигатель запускается только под нагрузкой, не работает на холостых оборотах.
- Смешанное возбуждение подразумевает монтаж двух обмоток на каждом из полюсов. Отличительный признак такого двигателя – реверсивное движение при смене полярности. Для регулировки в электросхему включают резисторы.
- Серводвигатели действуют по принципу использования отрицательной обратной связи, способны выдавать высокие обороты. Разработаны для поточных линий, высокопроизводительных станков.
- Линейные двигатели с возвратно-поступательным движением ротора устанавливаются в прессах, молотах, механизмах подачи. Помогают избежать установки передаточных устройств, червячных передач.
Коллекторно-щёточные узлы в современных моделях модифицированы, для контактов используют износостойкие композиты.
Двигатели переменного тока
Широкий модельный ряд включает моторы, работающие от однофазной и трёхфазной электрической сети.
Основные виды:
- Синхронные отличаются одинаковой частотой вращения магнитного момента и рамки, поэтому работают с постоянной скоростью. Приводы подключают к нагнетателям, компрессорному оборудованию, насосам.
- В асинхронных разная частота вращения создаётся за счёт фазного и короткозамкнутого подключения возбуждающих обмоток и ротора. За счёт частотной разницы можно регулировать скорость вращения приводного вала.
- Шаговые двигатели преобразуют электроимпульсы дискретно, с определённым шагом. Моторы при незначительных размерах характеризуются высокой продуктивностью. Устанавливаются в процессорные вентиляторы, другую офисную технику.
Зная особенности электродвигателей, можно выбрать надёжную бытовую технику или электроинструмент.
Что такое двигатель переменного тока? Определение и типы
Определение: Двигатель, преобразующий переменный ток в механическую энергию с помощью явления электромагнитной индукции, называется двигателем переменного тока. Этот двигатель приводится в действие переменным током. Статор и ротор — две наиболее важные части двигателей переменного тока. Статор — это неподвижная часть двигателя, а ротор — это вращающаяся часть двигателя. Двигатель переменного тока может быть однофазным или трехфазным.
Трехфазные двигатели переменного тока в основном используются в промышленности для преобразования большой мощности с электрической в механическую.Для преобразования малой мощности в основном используются однофазные двигатели переменного тока. Однофазные двигатели переменного тока почти малы по размеру и обеспечивают широкий спектр услуг в доме, офисе, на предприятиях, на фабриках и т. Д. Почти все бытовые приборы например, холодильники, вентиляторы, стиральные машины, фены, миксеры и т. д. используют однофазный двигатель переменного тока.
Электродвигатели переменного тока в основном делятся на два типа. Это синхронный двигатель и асинхронный двигатель.
Синхронный двигатель
Двигатель, преобразующий электрическую мощность переменного тока в механическую энергию и работающий только с синхронной скоростью, известен как синхронный двигатель.
Принцип работы синхронного двигателя
Когда питание подается на синхронный двигатель, создается вращающееся поле. Это поле пытается увлечь за собой ротор, но не может этого сделать из-за инерции ротора. Следовательно, пусковой крутящий момент не создается. Таким образом, синхронный двигатель по своей сути не запускается автоматически.
Асинхронный двигатель или асинхронный двигатель
Машина, которая преобразует электрическую энергию переменного тока в механическую энергию с помощью явления электромагнитной индукции, называемого асинхронным двигателем.Асинхронный двигатель в основном подразделяется на два типа: однофазный асинхронный двигатель и трехфазный асинхронный двигатель.
Принцип работы асинхронного двигателя
В индукционной машине обмотка якоря служит одновременно обмоткой якоря и обмоткой возбуждения. Когда обмотки статора подключены к питающему переменному току, в воздушном зазоре создается поток. Поток вращается с фиксированной скоростью, называемой синхронной скоростью. Этот вращающийся поток индуцирует напряжения в обмотке статора и ротора.Если цепь ротора замкнута, ток течет через обмотку ротора и реагирует с вращающимся потоком, создавая крутящий момент. В установившемся режиме ротор вращается со скоростью, очень близкой к синхронной.
VI. Сопоставьте компоненты 1-8 с их функциями a-h с помощью этой упрощенной схемы ветряной турбины.
| А | В |
| 1 ступица | передает мощность на генератор |
| 2 лезвия | b связывает лопасти с низкооборотным валом |
| 3 передачи | c содержит основные компоненты |
| 4 быстроходных вала | d останавливает турбину |
| 5 генератор | e захват энергии ветра |
| 6 корпус (гондола) | f увеличивает скорость вала |
| 7 тормоз | г реле питания зубчатой передачи |
| 8 тихоходных валов | ч производит электричество |
VII. Прочтите веб-страницу и ответьте на вопросы ниже.
ТЕХНОКАНАЛ: телеканал для тех, кто любит технологии
Techno Channel взял интервью у эксперта по ветряным турбинам, доктора Роджера Джонса.
Как работает ветряная турбина?
Ветер дует на лопасти и заставляет их вращаться. Это заставляет вал вращаться со скоростью примерно 30-60 об / мин.
Но разве это не слишком медленно? Вал генератора должен вращаться со скоростью 1200-1400 об / мин.
Верно. Есть два вала. Есть тихоходный вал и высокоскоростной вал. Тихоходная прикреплена к большой передаче. Быстроходный прикреплен к маленькой шестерне. Большая шестерня заставляет маленькую шестерню вращаться, а маленькая шестерня заставляет вращаться высокоскоростной вал. Этот вал вращается со скоростью 1200-1400 об / мин.
Ага, понятно. И он заводит генератор на такой скорости?
Верно. А затем генератор вырабатывает электричество переменного тока.
Что произойдет, если ветер будет слишком сильным?
Анемометр измеряет скорость ветра. Он отправляет эти данные контроллеру. (Контроллер представляет собой небольшой компьютер.) Если скорость ветра превышает 90 км / ч, контроллер автоматически выключает ветряную турбину. Это предотвращает повреждение турбины.
1. Какая часть вращает тихоходный вал?
2. Каковы две основные функции контроллера?
3.Какая часть передает вращение генератору?
Разговорная
Роторы и турбины
VIII Пройдите эту викторину. Что вы знаете о ветряных турбинах?
| 1. Какова высота башни самой высокой ветряной турбины в мире? а) около 100 м б) около 180 м в) около 200 м 2. Насколько высока самая высокая турбина в мире? а) около 1800 м б) около 2300 м в) около 2600 м 3.Какая минимальная скорость ветра для большой ветряной турбины? а) примерно 15 км / ч б) примерно 20 км / ч в) примерно 25 км / ч 4. Какова максимальная скорость ветра для большой ветряной турбины? а) около 45 км / ч б) около 70 км / ч в) около 90 км / ч |
Электродвигатели
Чтение
I. Прочтите следующие слова:
механический, двигатель, утилизировать, преобразовать, бытовой, желательно, взаимозаменяемость, стандартизированный, синхронный, единообразие, тем не менее.
Дата: 11.12.2015; просмотреть: 1709
Символы электродвигателей — AC / DC, однофазные / трехфазные двигатели
Символы AC / DC, однофазные и трехфазные электродвигатели
Список всех символов электродвигателей на одном изображении приведен ниже в качестве ссылки в конце этого сообщения.
Обмотка / катушка электродвигателя
Этот символ представляет обмотку или катушку электродвигателя.Обмотка внутри двигателя создает необходимое магнитное поле при возбуждении электрическим током.
Обмотка серии
Обмотка возбуждения, подключенная последовательно к обмотке якоря двигателя, называется последовательной обмоткой. Ток, потребляемый в таком двигателе, огромен, так как он работает последовательно и производит довольно большой крутящий момент.
Шунтирующая обмотка
Обмотка возбуждения, подключенная параллельно обмотке якоря двигателя, называется шунтирующей обмоткой.Сопротивление шунтирующей обмотки обычно велико, чтобы предотвратить протекание сильного тока.
Угольная щетка
Это компонент внутри электродвигателя, который передает электрический ток между статором (неподвижная часть) и ротором (вращающаяся часть). Обычно он сделан из графита, и его можно заменить во время технического обслуживания после износа.
Общий двигатель
Это обозначение общего электродвигателя, используемого в электрических схемах.Двигатель преобразует электрическую энергию в механическую.
Двухскоростной двигатель
Этот символ обозначает двухскоростной двигатель. Такие двигатели имеют две отдельные обмотки для разного передаточного числа. Каждая обмотка одновременно обеспечивает разную скорость и крутящий момент.
Двигатель переменного тока
Этот символ представляет двигатель переменного тока. Этот тип двигателя работает только от переменного тока. Он преобразует электрическую энергию переменного тока в механическую.
Двигатель постоянного тока
Этот символ используется для обозначения двигателя постоянного тока на любой электрической схеме. Он преобразует электрическую энергию постоянного тока в механическую. Работает только на постоянном токе.
Линейный двигатель
Это общий символ, используемый для обозначения линейного двигателя. У линейного двигателя статор развернут, что приводит к созданию линейной силы вместо вращающего момента.
Шаговый двигатель
300+ TOP INDUCTION MOTOR Интервью Вопросы и ответы
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ Вопросы для интервью: —
1.Как работает асинхронный двигатель? (ИЛИ) Почему вращается ротор?
- Когда трехфазные обмотки статора питаются от трехфазного источника питания, создается магнитный поток постоянной величины, который вращается с синхронной скоростью.
- Поток проходит через воздушный зазор и проходит мимо поверхности ротора, таким образом разрезая проводники ротора.
Из-за относительной скорости между вращающимся потоком и неподвижными проводниками ротора в неподвижных проводниках ротора индуцируется ЭДС в соответствии с законами электромагнитной индукции Фарадея. - Частота наведенной ЭДС совпадает с частотой питающей сети.
- Его величина пропорциональна относительной скорости между потоком и проводниками.
- Его направление будет соответствовать правилу правой руки Флеминга.
- Так как проводники ротора образуют замкнутую цепь, в роторе вырабатывается ток.
- Направление этого потока будет противостоять самой причине, вызывающей его (согласно закону Лена)
- Здесь причиной является относительная скорость между вращающимся потоком статора и неподвижными проводниками ротора.
- Следовательно, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся магнитный поток, и пытается догнать вращающийся поток. Таким образом, ротор асинхронного двигателя начинает вращаться.
2. Каков общий принцип работы асинхронного двигателя?
- Преобразование электрической энергии в механическую происходит во вращающейся части электродвигателя.
- В двигателях постоянного тока электрическая мощность передается непосредственно на якорь через щетки и коммутатор.
Таким образом, двигатель постоянного тока можно назвать кондуктивным. Но в случае двигателей переменного тока ротор получает электроэнергию не по проводимости, а по индукции. - Это точно так же, как вторичная обмотка двухобмоточного трансформатора получает питание от первичной обмотки.
- Вот почему такие двигатели называют асинхронными.
- Таким образом, асинхронный двигатель также известен как вращающийся трансформатор (т.е. двигатель, в котором первичная обмотка неподвижна, а вторичная может свободно вращаться)
3.В чем преимущество скошенных пазов статора в роторе асинхронных двигателей?
- В конструкции асинхронного двигателя пазы ротора специально выполнены с небольшим перекосом. Он не будет параллелен валу.
- Это сделано для уменьшения магнитной блокировки или уменьшения магнитного притяжения между статором и зубьями ротора.
- Кроме того, такое расположение поможет уменьшить магнитный гул и шум.
4.Что означает зубчатая передача в асинхронном двигателе? Как предотвратить зубчатость?
Когда количество зубцов в статоре и роторе одинаково, зубья статора и ротора имеют тенденцию выравниваться точно напротив друг друга, поскольку это соответствует положению минимального сопротивления. В этом случае ротор может отказаться ускоряться. Это явление называется магнитным запиранием или зазубриной.
Эту проблему можно предотвратить правильным выбором пазов статора и ротора, а также смещением пазов ротора на один шаг паза.
5. Какие существуют методы измерения скольжения?
- По фактическому измерению частоты вращения ротора
- Путем измерения частоты ротора
- Стробоскопический метод
6. Каковы различные методы регулирования скорости в трехфазных асинхронных двигателях?
(i) Управление со стороны статора
1. Путем изменения частоты питания
2. Путем изменения количества полюсов статора
3.Изменяя напряжение питания
(ii) Управление со стороны ротора
1. Добавляя сопротивление в цепь ротора
2. Посредством различных способов каскадного соединения
3. Путем введения ЭДС в цепь ротора.
7. Что означает тяга в асинхронном двигателе?
В асинхронных двигателях, особенно в асинхронных двигателях с короткозамкнутым ротором, иногда наблюдается тенденция к стабильной работе на скоростях, составляющих всего одну седьмую от их синхронной скорости Ns. Это явление известно как медленное движение асинхронного двигателя, а скорость называется замедленной скоростью.
8. Что такое асинхронный двигатель?
Асинхронный двигатель (IM) — это тип асинхронного двигателя переменного тока, в котором энергия подается на вращающееся устройство посредством электромагнитной индукции.
9. Что такое электродвигатель?
Электродвигатель преобразует электрическую энергию в механическую в своем роторе.
10. Как запитать ротор?
В двигателе постоянного тока эта мощность подается на якорь непосредственно от источника постоянного тока, в то время как в двигателе переменного тока эта мощность индуцируется во вращающемся устройстве.
11. Почему асинхронный двигатель иногда называют вращающимся трансформатором?
Асинхронный двигатель иногда называют вращающимся трансформатором, потому что статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор (вращающаяся часть) — вторичной стороной.
12. Кто изобрел асинхронный двигатель?
Никола Тесла.
13. В чем основное отличие синхронного двигателя от асинхронного?
Основное различие между асинхронным двигателем и синхронным двигателем переменного тока состоит в том, что в последнем на ротор подается ток.Затем это создает магнитное поле, которое посредством магнитного взаимодействия связывается с вращающимся магнитным полем в статоре, которое, в свою очередь, вызывает вращение ротора. Это называется синхронным, потому что в установившемся режиме скорость ротора такая же, как и скорость вращающегося магнитного поля в статоре.
14. Почему обмотки статора расположены вокруг ротора?
асинхронный двигатель не имеет прямого питания на роторе; вместо этого в роторе индуцируется вторичный ток.Для этого обмотки статора расположены вокруг ротора таким образом, что при подаче многофазного питания они создают вращающийся рисунок магнитного поля, который проходит мимо ротора. Эта изменяющаяся картина магнитного поля может индуцировать токи в проводниках ротора. Эти токи взаимодействуют с вращающимся магнитным полем, создаваемым статором, и ротор вращается.
15. Почему скорость физического ротора и скорость вращающегося магнитного поля в статоре должны быть разными?
скорость физического ротора и скорость вращающегося магнитного поля в статоре должны быть разными, иначе магнитное поле не будет перемещаться относительно проводников ротора и не будут индуцироваться токи.
16. Что такое SLIP?
Эта разница между скоростью ротора и скоростью вращающегося магнитного поля в статоре называется скольжением. Он не имеет единицы измерения и представляет собой отношение относительной скорости магнитного поля, видимого ротором, к скорости вращающегося поля. Из-за этого асинхронный двигатель иногда называют асинхронной машиной.
17. Сколько типов асинхронных двигателей?
В зависимости от типа источника питания
Трехфазный асинхронный двигатель (самозапускающийся по своей природе)
Однофазный асинхронный двигатель (не самозапускающийся)
Другое
Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом
18.Какова взаимосвязь между числом полюсов частоты питания и синхронной скоростью?
f = Pns / 2
19. Что такое синхронная скорость?
\ mbox {Синхронная скорость,} n_s = \ frac {120f} {P} \ quad [\ mbox {об / мин}]
20. Что такое скорость ротора?
Скорость ротора, nr = нс (1-с)
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ Вопросы Pdf ::
21. Как рассчитать скольжение?
Пробуксовка рассчитывается по формуле:
с = [нс-нс] / нс
22.Что такое статор?
Статор состоит из намотанных «полюсов», по которым протекает ток питания, который индуцирует магнитное поле в проводнике. Число «полюсов» может варьироваться в зависимости от типа двигателя, но полюса всегда попарно (т.е. 2, 4, 6 и т. Д.).
23. Сколько существует типов ротора?
Есть два типа роторов
- Ротор с короткозамкнутым ротором.
- Контактное кольцо ротора.
24. Какие методы используются для достижения желаемой скорости?
Наиболее часто используемый метод — широтно-импульсная модуляция, при которой сигнал постоянного тока включается и выключается очень быстро, создавая последовательность электрических импульсов на обмотках индуктора.
25. В чем разница между двигателями постоянного тока и асинхронными двигателями?
Асинхронный двигатель не имеет щеток и прост в управлении. Многие старые двигатели постоянного тока заменяются асинхронными двигателями и соответствующими инверторами в промышленных приложениях.
26. Как запускается асинхронный двигатель? Почему используется стартер?
Когда двигатель запускается, скольжение равно 1, поскольку скорость ротора равна нулю, поэтому наведенная ЭДС в роторе велика. В результате через ротор протекает очень сильный ток.Это похоже на трансформатор с короткозамкнутой вторичной обмоткой, в результате чего первичная обмотка потребляет большой ток из сети. Аналогичным образом, когда запускается асинхронный двигатель, статор потребляет очень высокий ток, в 5–9 раз превышающий ток полной нагрузки. Этот высокий ток может повредить обмотки двигателя и, поскольку он вызывает сильное падение напряжения в сети, колебания напряжения могут повлиять на другие устройства, подключенные к той же линии. Чтобы избежать таких эффектов, следует ограничить пусковой ток.Устройство плавного пуска — это устройство, ограничивающее пусковой ток за счет подачи на двигатель пониженного напряжения. Как только частота вращения ротора увеличивается, на него подается полное номинальное напряжение.
27. Что такое ротор?
Ротор — это нестационарная часть вращающегося электродвигателя или генератора переменного тока, которая вращается, потому что провода и магнитное поле двигателя расположены так, что вокруг оси ротора создается крутящий момент. В некоторых конструкциях ротор может выступать в качестве якоря двигателя, на который подается входное напряжение.Неподвижной частью электродвигателя является статор. Распространенная проблема называется зубчатым моментом.
28. Что такое статор?
Статор — это неподвижная часть электрогенератора или электродвигателя. Нестационарной частью электродвигателя является ротор.
В зависимости от конфигурации вращающегося электродвижущего устройства статор может действовать как полевой магнит, взаимодействуя с якорем для создания движения, или он может действовать как якорь, получая свое влияние от движущихся катушек возбуждения на роторе.
29. Что такое коммутатор?
Коммутатор — это электрический переключатель, который периодически меняет направление тока в электродвигателе или электрическом генераторе. Коммутатор — обычная особенность вращающихся машин постоянного тока. За счет изменения направления тока в подвижной катушке якоря двигателя создается постоянная вращающая сила (крутящий момент). Точно так же в генераторе реверсирование подключения катушки к внешней цепи создает однонаправленный ток в цепи.Первая машина постоянного тока коммутаторного типа была построена Ипполитом Пикси в 1832 году,
30. Что такое арматура?
Якорь — это один из двух основных электрических компонентов электромеханической машины — двигателя или генератора. Другой — обмотка возбуждения, магнит возбуждения. Роль компонента «поля» заключается в простом создании магнитного поля (магнитного потока) для взаимодействия якоря, поэтому этот компонент может содержать либо постоянные магниты, либо электромагниты, образованные проводящей катушкой.Якорь, напротив, должен проводить ток, поэтому он всегда представляет собой проводник или проводящую катушку, ориентированную перпендикулярно как полю, так и направлению движения, крутящего момента (вращающаяся машина) или силы (линейная машина). Роль якоря двоякая: (а) переносить ток, пересекающий поле, таким образом создавая крутящий момент на валу (во вращающейся машине) или силу (в линейной машине), и (б) создавать электродвижущую силу («ЭДС» ).
31. Что такое момент зубчатого зацепления?
Крутящий момент электродвигателя — это крутящий момент, возникающий из-за взаимодействия между постоянными магнитами ротора и пазами статора машины с постоянными магнитами (PM).Также называемый фиксированным или «обесточенным» крутящим моментом, он является нежелательным компонентом для работы такого двигателя. Это особенно заметно на низких скоростях с симптомом рывков.
32. Каковы преимущества и недостатки асинхронных двигателей?
Преимущества:
- Простой и прочный по конструкции
- Относительно дешево
- Асинхронные двигатели требуют меньшего обслуживания
- Асинхронный двигатель имеет высокий КПД и достаточно хороший коэффициент мощности
- Машины индукционные трехфазные самозапускающиеся
Недостатки:
- Асинхронные двигатели по сути являются двигателями с постоянной скоростью, и их скорость не может быть легко изменена
- Асинхронные двигатели всегда работают с отстающим коэффициентом мощности, а в условиях небольшой нагрузки они работают с очень худшим коэффициентом мощности (0.От 2 до 0,4). Некоторыми из недостатков плохой мощности являются увеличение потерь I2R в системе, снижение КПД системы. Следовательно, рядом с этими двигателями следует размещать некоторое оборудование для коррекции коэффициента мощности, такое как батареи статических конденсаторов, чтобы передавать им реактивную мощность.
- Одним из основных недостатков асинхронных двигателей является то, что регулирование скорости асинхронных двигателей затруднено. Следовательно, для точного регулирования скорости вместо асинхронных двигателей используются двигатели постоянного тока.Благодаря прогрессу в силовой электронике, преобразователи частоты с асинхронными двигателями теперь используются в промышленности для регулирования скорости.
34. Преимущества и недостатки асинхронного двигателя с контактным кольцом по сравнению с двигателями с короткозамкнутым ротором?
Преимущества:
- Высокий пусковой момент при низком пусковом токе
- Плавное ускорение при больших нагрузках
- Нет аномального нагрева при запуске
- Хорошие рабочие характеристики после отключения внешних сопротивлений ротора
- Регулируемая скорость
Недостатки:
- Первоначальные затраты и затраты на техническое обслуживание выше, чем у двигателей с короткозамкнутым ротором
- Плохое регулирование скорости при работе с сопротивлением в цепи ротора
35.Способы управления скоростью двигателей с фазным ротором?
Ответ: Скорость двигателей с фазным ротором изменяется путем изменения скольжения двигателя. Этого можно достичь:
- Изменение линейного напряжения статора
- Изменение сопротивления в цепи ротора
- Включение и изменение постороннего источника напряжения в цепи ротора
36. Объясните, как изменяются характеристики скольжения крутящего момента при добавлении сопротивления в цепь ротора?
Ответ: Добавление сопротивления к цепи ротора не изменяет значение максимального крутящего момента, а только изменяет значение скольжения, при котором возникает максимальный крутящий момент
37.Недостатки пуска асинхронного двигателя звезда-треугольник?
Ответ: При пуске по схеме звезда-треугольник статор асинхронного двигателя соединен звездой, для пуска после набора скорости он соединен треугольником. Когда асинхронный двигатель подключен по схеме звезды, фазное напряжение статора уменьшается в 1 / (31/2) раза от напряжения сети.
