§7. Основополагающие принципы устройства ЭВМ
Планирование уроков на учебный год (ФГОС)
Главная | Информатика и информационно-коммуникационные технологии | Планирование уроков и материалы к урокам | 10 классы | Планирование уроков на учебный год (ФГОС) | §7. Основополагающие принципы устройства ЭВМ
Содержание урока:
7.1. Принципы Неймана-Лебедева
7.1. Принципы Неймана-Лебедева (продолжение)
7.2. Архитектура персонального компьютера
7.3. Перспективные направления развития компьютеров
САМОЕ ГЛАВНОЕ. Вопросы и задания
Материалы к уроку
| 7.2. Архитектура персонального компьютера | ||||
7. |
7.3. Перспективные направления развития компьютеров |
7.2. Архитектура персонального компьютера
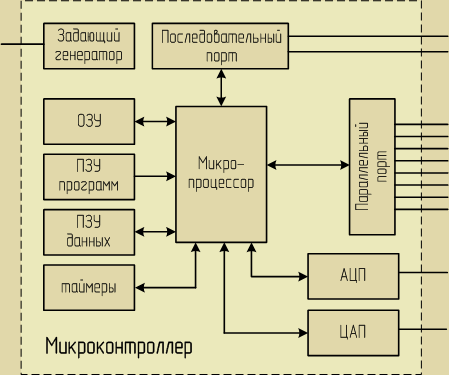
Современные персональные компьютеры различаются по своим размерам, конструкции, разновидностям используемых микросхем и модулей памяти, другим характеристикам. В то же время все они имеют единое функциональное устройство, единую архитектуру — основные узлы и способы взаимодействия между ними (рис. 2.7).
Архитектура — это наиболее общие принципы построения компьютера, отражающие программное управление работой и взаимодействием его основных функциональных узлов.
На рисунке 2.7 изображены хорошо известные вам узлы современного компьютера:
процессор,
внутренняя память,
устройства ввода,
устройства вывода и внешняя память.
Рис. 2.7. Функциональная схема компьютера (К — контроллер)
2.7. Функциональная схема компьютера (К — контроллер)
Обмен данными между устройствами компьютера осуществляется с помощью магистрали.
Магистраль (шина) — устройство для обмена данными между устройствами компьютера.
Магистраль состоит из трёх линий связи:
• шины адреса, используемой для указания физического адреса, к которому устройство может обратиться для проведения операции чтения или записи;
• шины данных, предназначенной для передачи данных между узлами компьютера;
• шины управления, по которой передаются сигналы, управляющие обменом информацией между устройствами и синхронизирующие этот обмен.
В компьютерах, имевших классическую фон-неймановскую архитектуру, процессор контролировал все процессы ввода/вывода. При этом быстродействующий процессор затрачивал много времени на ожидание результатов работы от значительно более медленных внешних устройств.
Контроллер — это специальный микропроцессор, предназначенный для управления внешними устройствами: накопителями, мониторами, принтерами и т. д.
Благодаря контроллерам данные по магистрали могут передаваться между внешними устройствами и внутренней памятью напрямую, минуя процессор. Это приводит к существенному снижению нагрузки на центральный процессор и повышает эффективность работы всей вычислительной системы.
Современные компьютеры обладают магистрально-модульной архитектурой, главное достоинство которой заключается в возможности легко изменить конфигурацию компьютера путём подключения к шине новых или замены старых внешних устройств.
Если спецификация на шину (детальное описание всех её параметров) является открытой (опубликованной), то производители могут разработать и предложить пользователям разнообразные дополнительные устройства для компьютеров с такой шиной. Подобный подход называют принципом открытой архитектуры. Благодаря ему пользователь может собрать именно такую компьютерную систему, которая ему нужна.
Подобный подход называют принципом открытой архитектуры. Благодаря ему пользователь может собрать именно такую компьютерную систему, которая ему нужна.
Cкачать материалы урока
| ||||||
Для выбора нужного контроллера перейдите в каталог товаров: 1. Программируемые логические контроллеры ПЛК 2. Панели и контроллеры оператора 3. Контроллеры для систем отопления и ГВС 4. Контроллеры для систем вентиляции и климата Контроллеры систем автоматизацииКонтроллеры в структуре системы автоматизации
Контроллеры являются основой многих систем автоматизации. Еще большая специализация микропроцессорных контроллеров наблюдается в «интеллектуальных» контроллерах для управления асинхронными двигателями: там все функции контроля, управления, реакции на аварийные ситуации сосредоточены в простейшем чипе, который выдает исполнительные сигналы на силовые элементы схемы. В противоположность специализированным программируемым контроллерам, универсальные ПЛК можно применить для решения разнообразного круга задач управления и контроля. Обычно, описывая контроллеры, обращают внимание на программируемость, возможности замены любого из дискретных устройств. Все это справедливо. Возможности контроллеров системы автоматизации
Проанализируем на сколько контроллеры с классической модульной архитектурой и параллельной шиной соответствуют требованиям систем автоматизации.
Купить контроллеры систем автоматизации по выгодной цене Купить по низкой цене контроллеры для автоматизации в Ростове-на-Дону, Ростовской области, в Краснодаре и Краснодарском Крае, Ставрополе и Ставропольском Крае, Волгограде и Волгоградской области, в городах:Владикавказ, Грозный, Махачкала, Нальчик и других городах Юга России можно в нашей компании. Все покупатели могут получить бонусы и подарки! Доставка контроллеров и других приборов автоматизации в города Юга России
Мы доставим любые контроллеры и приборы автоматизации и автоматики в города: Ростов, Краснодар, Волгоград, Элиста, Астрахань, Ставрополь, Невинномысск, Минеральные Воды, Кисловодск, Таганрог, Новочеркасск, Азов, Шахты, Сочи, Новороссийск, Анапа, Туапсе, Геленджик, Ейск, Майкоп, Армавир, Пятигорск, Железноводск, Черкесск, Нальчик, Владикавказ, Грозный, Махачкала, Волгодонск, Сальск, Тихорецк, Тимашевск. Возможна доставка до двери предприятия. | ||||||
 Программируемые контроллеры бывают универсальные и специализированные. К специализированным контроллерам можно отнести изделия, ориентированные, например, на компенсацию реактивной электрической энергии. Количество входных сигналов и их назначение определены «прошивкой» памяти контроллера и его схемой. Реакция определена логикой управления и количеством выходных исполнительных сигналов.
Программируемые контроллеры бывают универсальные и специализированные. К специализированным контроллерам можно отнести изделия, ориентированные, например, на компенсацию реактивной электрической энергии. Количество входных сигналов и их назначение определены «прошивкой» памяти контроллера и его схемой. Реакция определена логикой управления и количеством выходных исполнительных сигналов.

Coding Electronics — Ориентированное на человека руководство по демистификации технологии
Перейти к содержимому
Оранжевый модуль: запуск, ориентированный на человека
4D: Coding Electronics
В качестве последнего упражнения для этого модуля мы принесем оборудование вместе с программным обеспечением для реализации кода Python для включения или выключения светодиодных индикаторов. Затем мы поиграем в контристории с Raspberry Pi.До сих пор ваши светодиоды и мгновенные выключатели работали вместе непосредственно как часть изолированных цепей. Но в этом заключительном упражнении давайте перемонтируем их для связи с приложением, которое мы загрузим в операционную систему Raspberry Pi и запустим с помощью Python.
За пределами земли, контакты 5 В и 3,3 В на Raspberry Pi, у нас есть широкий спектр других контактов, к которым мы можем подключиться, как видно на изображении ниже. Те, которые помечены знаком решетки (#), имеют особый приоритет для использования в качестве входных и выходных данных в программах. Но то, как они используются, зависит от решения кодеров.
Те, которые помечены знаком решетки (#), имеют особый приоритет для использования в качестве входных и выходных данных в программах. Но то, как они используются, зависит от решения кодеров.
В этом упражнении мы будем использовать GPIO № 12 и GPIO № 16 для переключателей мгновенного действия и GPIO № 20 и № 21 для светодиодов, которые будут интегрированы в программный код. Основные причины такого выбора включают:
- Они размещаются на стороне, противоположной тому, куда наклоняется ленточный кабель, что улучшает видимость этикеток Cobbler.
- Они находятся рядом с электронными компонентами.
- Это объединяет переключатели (№ 12 и № 16) и светодиоды (№ 20 и № 21) в одном порядке (№ 12 и № 20 в «системе белых светодиодов» ближе к GPIO; № 16 и № 21 в «система синих светодиодов» дальше от GPIO).
Часть 1. Действия по перемонтажу цепей
Вот конфигурация наших текущих цепей в качестве напоминания о том, с чего мы начинаем. [1]
-
Снимите нижний синий 10-мм светодиод из ряда I, столбцы 9 и 10.

Также удалите провод заземления и 5-вольтовую перемычку и резистор 560 Ом для этого светодиода.
- Оставьте верхний синий 10-мм светодиод на месте вместе с заземляющей перемычкой.
Но удалите 5-вольтовую перемычку из ряда D, столбцов 3 и 9.
- Снимите нижний белый 3-мм светодиод из ряда H, столбцы 27 и 28.
Также удалите провод заземления и 5-вольтовую перемычку для этого светодиода.
- Оставьте верхние белые 3-мм светодиоды на месте вместе с проводами заземления.
Но удалите 5-вольтовую перемычку из ряда A, столбцов 20 и 28.
- Поместите заземляющую перемычку от верхней синей направляющей к столбцу 17, ряд A.
- Поместите резистор 560 Ом в ряд D между столбцами 5 и 9.
 , анодная ножка синего светодиода 10мм.
, анодная ножка синего светодиода 10мм.
- Поместите резистор 560 Ом в ряд A между столбцами 28, анодной ножкой одного из белых 3-мм светодиодов и столбцом 32.
- Установите соединение между № 16 GPIO и правым переключателем мгновенного действия.
Для этого оставьте заземляющую перемычку для правого выключателя мгновенного действия, подключенную к столбцу 1 ряда A. Но подключите другой конец перемычки к столбцу 46 ряда A.
- Установите соединение между #12 GPIO и левым переключателем мгновенного действия.
Для этого проложите перемычку от столбца 20, ряд A, до столбца 48, ряд A.
- Установите соединение между № 20 GPIO и белыми 3-мм светодиодами.
Для этого проложите перемычку от столбца 32, ряд B, до столбца 45, ряд B.
- Установите соединение между № 21 GPIO и синим 10-мм светодиодом.
Для этого проложите перемычку от столбца 5, ряд A, до столбца 44, ряд A.
Часть 2. Действия по запуску кода
На этом этапе упражнение будет варьироваться в зависимости от выбранного вами метода приключения, Quickstart или Headless, для настройки Raspberry Pi. Для этого шага перейдите к соответствующему упражнению ниже:
Для этого шага перейдите к соответствующему упражнению ниже:
- Краткое упражнение
- Упражнение без головы
Быстрый запуск
Когда наши схемы завершены, мы настроены использовать программное обеспечение для определения того, нажаты или нет переключатели мгновенного действия, подключенные к контактам GPIO № 12 и № 16. Затем мы можем использовать это программное обеспечение, чтобы также определить, подавать ли ток на светодиоды, подключенные к контактам GPIO № 20 и № 21.
В течение 7 минут просмотрите следующее видео, а затем выполните указанные ниже действия.
- Откройте веб-браузер Chromium.
- На вкладке местоположения браузера введите: https://uofi.box.com/s/i41htorftqpwnpmhoyd6dh6hjyrwjckl, чтобы открыть файл Python pushButton.py
- Взгляните на код, но самое главное, щелкните правой кнопкой мыши в окне, чтобы сохранить программу как
pushButton.py(НЕ как pushButton.txt, который автоматически отображается на многих компьютерах).
- Открыть окно терминала.
- В командной строке введите:
python3 Downloads/pushButton.py
- Следуйте напечатанным инструкциям, чтобы включать и выключать светодиоды и выходить из программы по завершении.
Без головы
Вот как использовать консоль для настройки и запуска кода Python на Raspberry Pi. Это предполагает, что вы уже подключили Raspberry Pi к ноутбуку с помощью кабеля USB-TTL и использовали терминал (на Mac) или PuTTY (в Windows) для удаленного доступа к интерфейсу командной строки Raspberry Pi. Если вам нужно освежить знания, в Варианте 2: руководство без головы в оранжевом модуле «4C: Начало работы с Raspberry Pi» содержатся подробные инструкции.
- На ноутбуке откройте интернет-браузер. В веб-браузере введите: https://uofi.box.com/s/i41htorftqpwnpmhoyd6dh6hjyrwjckl
- Кратко просмотрите код.
- Выделить все и скопировать код.
- Перейдите к окну терминала, подключенному к Raspberry Pi, введите:
nano pushButton. py
py - Это создаст новый файл Python на Raspberry Pi с именем pushButton и откроет текстовый редактор Nano. Вставьте скопированный код в Nano. 9Х (CTRL+Х).
- Чтобы запустить код Python, в окне терминала введите:
python3 pushButton.py
Основные выводы
Уделите 10 минут просмотру видео «Ускоренный курс компьютерных наук» от Кэрри Энн Филбин, в котором рассказывается, как «Инструкции и программы» могут служить первым шагом от аппаратного к программному обеспечению.
На предыдущих сессиях Оранжевого отряда схемы были построены с использованием электронных компонентов без кода.
В этих схемах мы могли бы использовать макетную плату с широким диапазоном источников тока и заземления для Cobbler, помимо источника питания Raspberry Pi.
Как упоминалось в начале этого упражнения, мы решили использовать GPIO #12 и GPIO #16 Raspberry Pi для считывания состояния переключателей мгновенного действия, а GPIO #20 и #21 управляют состоянием светодиодов. В этом случае GPIO Raspberry Pi, связанная с ним электроника и встроенный код вместе образуют одну более сложную схему. 9Код 0035, в данном случае с использованием языка программирования Python, используется для определения действий на основе состояния переключателей мгновенного действия и проектных решений, управляющих состоянием светодиодов.
Среди основных причин такого выбора:
- Они размещаются на стороне, противоположной тому, куда наклоняется ленточный кабель, что улучшает видимость этикеток Cobbler.
- Они находятся рядом с электронными компонентами.
- Это объединяет переключатели (№ 12 и № 16) и светодиоды (№ 20 и № 21) в одном порядке (№ 12 и № 20 в «системе белых светодиодов» ближе к GPIO; № 16 и № 21 в «система синих светодиодов» дальше от GPIO).

Как вы могли бы спроектировать его по-другому?
Правда или ложь? По мере того, как мы переходим от схем, состоящих исключительно из физических электронных частей, к схемам, которые также включают в себя программный код, открываются большие возможности для инноваций в использовании.
Хотя мы, возможно, уже использовали приложение на наших персональных компьютерах для воспроизведения наших контристорий, давайте посмотрим, на что это может быть похоже, если вместо этого использовать микрокомпьютер Raspberry Pi. Позже в этой книге мы перейдем к использованию Circuit Playground Express для воспроизведения выбранных историй. А затем мы установим веб-сервер Apache на Raspberry Pi, чтобы мы могли воспроизводить их также через веб-страницу. Но сначала давайте перейдем к копированию файлов на Raspberry Pi и воспроизведению звука с помощью приложения OMXPlayer, которое есть на Raspberry Pi.
В рамках этого упражнения мы предпримем следующие шаги:
ШАГ 1: Создайте рабочую область на своем ноутбуке. Эта папка будет использоваться для четкой идентификации мультимедийных данных, которые будут передаваться на Raspberry Pi и обратно по мере необходимости. Скопируйте эту папку на флешку.
Эта папка будет использоваться для четкой идентификации мультимедийных данных, которые будут передаваться на Raspberry Pi и обратно по мере необходимости. Скопируйте эту папку на флешку.
ШАГ 2. Перенесите файлы данных между ноутбуком и Raspberry Pi с помощью USB-накопителя.
ШАГ 3. Проверьте воспроизведение звука на Raspberry Pi. Хотя существует множество способов воспроизведения аудио и видео с помощью Raspberry Pi, мы выберем встроенный OMXPlayer.
Шаг 1. Создайте рабочее пространство Counterstory на своем ноутбуке
На ноутбуке настройте компоненты цифровой контристории:
- Создайте папку cstories для хранения MP3-файлов counterstory.
- Сохраните один или несколько черновиков контристории в виде файлов MP3 в папке cstories.
- Возьмите флэш-накопитель USB и вставьте его в свой ноутбук.
- Скопируйте папку cstories и ее содержимое на USB-накопитель.
Шаг 2. Перенесите файлы с ноутбука на Raspberry Pi
- Установите окно терминала Raspberry Pi.
 Когда у вас открыто окно терминала, последующие шаги точно такие же.
Когда у вас открыто окно терминала, последующие шаги точно такие же.
- ПУТЬ 1: Если у вас есть подключение клавиатуры, монитора и мыши к Raspberry Pi, используйте вкладку «Пуск», чтобы открыть новое окно терминала.
- ПУТЬ 2: Если вы используете Raspberry Pi без головы (то есть без клавиатуры, монитора и мыши), используйте последовательный кабель TTL/USB для подключения Raspberry Pi к компьютеру. (Перейдите к последнему сеансу, если вам нужно освежить в памяти!)
- В этом случае мы видим «~», указывающий, что мы находимся в домашнем каталоге. Для практики мы сначала убедимся, что находимся в домашнем каталоге пользователя «pi», используя команду «cd», чтобы перейти в «~» или домашний каталог пользователя:
pi@raspberrypi:~ $ cd ~
pi@raspberrypi:~ $ - Вставьте флэш-накопитель USB в порт USB на Raspberry Pi.
- Далее нам нужно узнать имя флешки. Введите эту команду, которая покажет все подключенные «диски» (например, загрузочные) и их доступное дисковое пространство в удобочитаемом формате.
 Обратите внимание, что команды чувствительны к регистру.
Обратите внимание, что команды чувствительны к регистру.
pi@raspberrypi:~ $ df -H - Найдите в столбце «Файловая система» строку, начинающуюся с
/dev/sda. Имя USB-накопителя будет указано в столбце «Mounted on» после/media/pi. - Как только вы узнаете имя USB-накопителя, вы можете скопировать папку cstories и ее содержимое с диска в домашний каталог вашего Raspberry Pi. В следующей команде замените имя флешки на свое.
pi@raspberrypi:~ $ cp –r /media/pi/NameOfUSBdrive/cstories ~/cstories/
Обратите внимание, что между/cstoriesи~/cstories/ .- 4 есть один пробел.
- Если вам кажется, что после выполнения команды ничего не происходит, значит, она сработала! Введите
ls –F, чтобы просмотреть содержимое вашего домашнего каталога, указав папки с косой чертой в конце. Надеюсь, вы увидитеcstories/указана папка! Оставайтесь в системе на своем терминале Raspberry Pi, так как мы вернемся к этому через минуту.
Введение в окно терминала можно найти в конце книги: Использование командной строки Unix.
Шаг 3. Тестирование воспроизведения аудио MP3 на Raspberry Pi
OMXPlayer — аудио- и видеоплеер, созданный специально для Raspberry Pi. Он предустановлен в ОС Raspberry Pi. Мы будем использовать это как наш цифровой инструмент «Маленькая бесплатная библиотека». Чтобы узнать больше о возможностях OMXPlayer и получить инструкции по многочисленным пользовательским командам, посетите веб-сайт OMXPlayer.
Для проверки воспроизведения звука Raspberry Pi:
- Подключите наушники или динамик к аудиоразъему на Raspberry Pi.
- Вернитесь в окно терминала Raspberry Pi. Перейдите в папку cstories/, также называемую сменой каталогов, а затем перечислите файлы MP3 с помощью следующих команд:
pi@raspberrypi:~ $ cd cstories
pi@raspberrypi:~ $ ls
- Запустите OMXPlayer для одного из файлов MP3, которые вы скопировали со своего ноутбука.
 Например, если ваш файл MP3 называется
Например, если ваш файл MP3 называется AQuickCounterStoryTest-1.mp3, введите:
pi@raspberrypi:~/cstories$ omxplayer AQuickCounterStoryTest-1.mp3 - Если вы подключены к монитору HDMI и не слышите звука, попробуйте добавить
-o localперед именем файла MP3. Это обеспечит воспроизведение звука через аудиопорт, а не через порт HDMI.
Мы перешли от простых параллельных схем светодиодов, использующих разные уровни сопротивления и разные напряжения, к последовательно подключенным светодиодам, управляемым переключателями мгновенного действия, к интегральным схемам и схемам на основе кода. Мы также впервые погрузились в пруд микрокомпьютеров Raspberry Pi, чтобы увидеть, как эти электронные части вместе с рядом другой электроники объединяются для создания больших и сложных систем, таких как компьютеры.
Широкий спектр отдельных электронных компонентов может быть объединен с использованием источников питания и заземления, а также проводников для создания отдельных цепей, таких как три различных светодиодных схемы, которые мы создали. Используя печатную плату, эти электронные компоненты можно собрать вместе для создания интегральной схемы, такой как интегральная схема Sequin LED. Интегральные схемы и дополнительные электронные компоненты могут быть дополнительно объединены с кодом для создания микроконтроллеров ограниченного назначения, таких как Circuit Playground Express, который мы будем использовать в Blue Unit, и микрокомпьютеров общего назначения, таких как Raspberry Pi.
Используя печатную плату, эти электронные компоненты можно собрать вместе для создания интегральной схемы, такой как интегральная схема Sequin LED. Интегральные схемы и дополнительные электронные компоненты могут быть дополнительно объединены с кодом для создания микроконтроллеров ограниченного назначения, таких как Circuit Playground Express, который мы будем использовать в Blue Unit, и микрокомпьютеров общего назначения, таких как Raspberry Pi.
Как упоминалось в видеоролике в начале этого занятия, моя история с компьютерами восходит к середине 1970-х годов, когда я учился в средней школе, а моя работа с общей электроникой еще длиннее, поскольку я вырос на лесопилке моей семьи. В этом следующем видео я делюсь своими воспоминаниями об электронике и программировании в конце 1980-х и начале 1990-х годов, когда я работал над своим исследованием в качестве аспиранта в Rutgers. Вы можете найти некоторое сходство с работой, которую мы только что сделали!
Проверка понимания
- Макетная графика Fritzing находится под лицензией CC-BY-SA 3.
 0. ↵
0. ↵
Лицензия
Ориентированное на человека руководство по демистификации технологий, авторское право © Martin Wolske, 2020. Авторское право «Придумывание и итерация кода: пример с нуля» © 2020 Betty Bayer and Stephanie Shallcross. Copyright «Введение в командную строку Unix» © 2020 Мартин Вольске, Динеш Рати, Генри Гроб и Вандана Сингх. Copyright «Безопасность и конфиденциальность» © 2020 Сара Расмуссен. находится под лицензией Creative Commons Attribution-ShareAlike 4.0 International License, если не указано иное.
Поделиться этой книгой
Поделиться в Твиттере
Что такое силовая электроника? - Как это работает
-
Как работает силовая электроника?
-
Типы силовых электронных схем
-
Важность силовой электроники
-
Преимущества силовой электроники
-
Силовая электроника и Синопсис
При производстве электроэнергии, особенно в возобновляемых источниках энергии, генерируемая мощность должна обрабатываться в соответствии со спецификацией напряжения переменного тока энергосистемы. Например, солнечный элемент генерирует мощность постоянного тока, выходная мощность которой зависит от рабочего напряжения и падающего солнечного излучения. Важно извлекать максимальную мощность, доступную на выходе ячейки, и передавать ее в сеть с максимально возможным КПД. Таким образом, интерфейс, который соединяет солнечную батарею с сетью, должен обеспечивать питание переменного тока, соответствующее спецификациям сети, и потреблять входную мощность, которая обеспечивает работу солнечной батареи в точке ее максимальной мощности. В дополнение к этому, преобразование этой мощности постоянного тока в мощность переменного тока должно быть с более высокой эффективностью, чтобы минимизировать потери при выработке электроэнергии. Это возможно при использовании силовых полупроводниковых приборов с развитыми механизмами управления, которые контролируют выходные и входные параметры и управляют переключателями.
Например, солнечный элемент генерирует мощность постоянного тока, выходная мощность которой зависит от рабочего напряжения и падающего солнечного излучения. Важно извлекать максимальную мощность, доступную на выходе ячейки, и передавать ее в сеть с максимально возможным КПД. Таким образом, интерфейс, который соединяет солнечную батарею с сетью, должен обеспечивать питание переменного тока, соответствующее спецификациям сети, и потреблять входную мощность, которая обеспечивает работу солнечной батареи в точке ее максимальной мощности. В дополнение к этому, преобразование этой мощности постоянного тока в мощность переменного тока должно быть с более высокой эффективностью, чтобы минимизировать потери при выработке электроэнергии. Это возможно при использовании силовых полупроводниковых приборов с развитыми механизмами управления, которые контролируют выходные и входные параметры и управляют переключателями.
Достижения в области силовых полупроводниковых устройств проложили путь для более новых устройств, таких как карбид кремния, полевые транзисторы на основе нитрида галлия (FET) и силовые диоды. Эти устройства имеют превосходные характеристики с точки зрения широкой запрещенной зоны, что позволяет работать при высоком напряжении, управлять температурным режимом и эффективностью. Это привело к широкому использованию силовой электроники даже в чувствительных к шуму областях, заменяя линейные источники питания и регуляторы напряжения с потерями. Основным преимуществом этих устройств является то, что они могут выдерживать высокое напряжение по сравнению с кремниевыми устройствами. Таким образом, системы могут быть спроектированы с возможностью работы с высоким напряжением, что, в свою очередь, снижает ток и повышает эффективность при подаче той же мощности. В дополнение к этому, работа устройств на более высоких частотах переключения помогает уменьшить размер пассивных компонентов, делая системы компактными. Способность выдерживать более высокие температуры упрощает теплотехнические конструкции.
Эти устройства имеют превосходные характеристики с точки зрения широкой запрещенной зоны, что позволяет работать при высоком напряжении, управлять температурным режимом и эффективностью. Это привело к широкому использованию силовой электроники даже в чувствительных к шуму областях, заменяя линейные источники питания и регуляторы напряжения с потерями. Основным преимуществом этих устройств является то, что они могут выдерживать высокое напряжение по сравнению с кремниевыми устройствами. Таким образом, системы могут быть спроектированы с возможностью работы с высоким напряжением, что, в свою очередь, снижает ток и повышает эффективность при подаче той же мощности. В дополнение к этому, работа устройств на более высоких частотах переключения помогает уменьшить размер пассивных компонентов, делая системы компактными. Способность выдерживать более высокие температуры упрощает теплотехнические конструкции.
Как работает силовая электроника?
Первичным элементом силовой электронной системы является импульсный преобразователь мощности. Силовой преобразователь состоит из силовых полупроводниковых приборов, которые включаются и выключаются на высоких частотах. Эта операция переключает напряжение и ток через устройства, обеспечивая контролируемую мощность на выходе. В дополнение к этому, мощность, потребляемая от входа, также может контролироваться. Идеальное устройство мгновенно переключает напряжение и ток и обеспечивает нулевое сопротивление при включении и бесконечное сопротивление при выключении. Но в реальном мире ни одно устройство не может быть переключено мгновенно. Импульсные преобразователи связаны с двумя видами потерь мощности в устройствах:
Силовой преобразователь состоит из силовых полупроводниковых приборов, которые включаются и выключаются на высоких частотах. Эта операция переключает напряжение и ток через устройства, обеспечивая контролируемую мощность на выходе. В дополнение к этому, мощность, потребляемая от входа, также может контролироваться. Идеальное устройство мгновенно переключает напряжение и ток и обеспечивает нулевое сопротивление при включении и бесконечное сопротивление при выключении. Но в реальном мире ни одно устройство не может быть переключено мгновенно. Импульсные преобразователи связаны с двумя видами потерь мощности в устройствах:
- Коммутационные потери
- Потери проводимости
Потери при переключении возникают при включении и выключении. Например, когда переключатель включается, напряжение на переключателе снижается до низкого значения по сравнению с напряжением, которое блокировалось, когда он находился в выключенном состоянии. При этом ток через устройство идет от нуля до уровня тока нагрузки.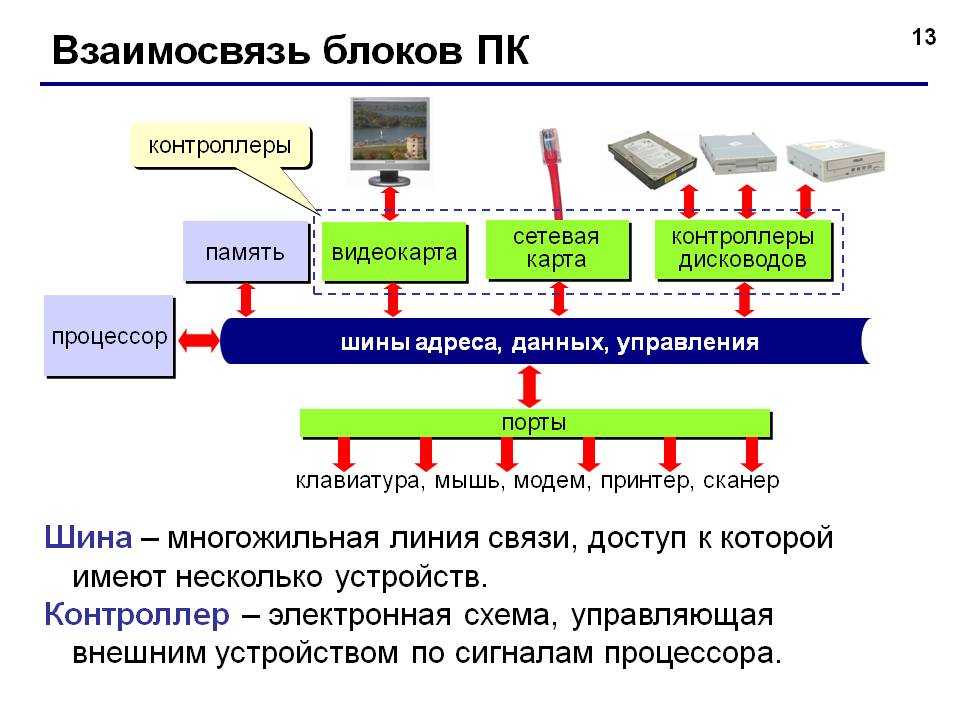 Поскольку этот процесс занимает конечное время, а напряжение и ток меняются, происходит потеря мощности. Переход обратный, когда переключатель выключается. Эти потери составляют коммутационные потери. Коммутационные потери увеличиваются с увеличением частоты коммутации. Чтобы свести к минимуму эти потери, реализовано несколько методов, таких как коммутация при нулевом напряжении и коммутация при нулевом токе, с использованием дополнительных конденсаторов и катушек индуктивности.
Поскольку этот процесс занимает конечное время, а напряжение и ток меняются, происходит потеря мощности. Переход обратный, когда переключатель выключается. Эти потери составляют коммутационные потери. Коммутационные потери увеличиваются с увеличением частоты коммутации. Чтобы свести к минимуму эти потери, реализовано несколько методов, таких как коммутация при нулевом напряжении и коммутация при нулевом токе, с использованием дополнительных конденсаторов и катушек индуктивности.
Потери проводимости являются результатом конечного падения напряжения во включенном состоянии на переключателях во время проводимости. Наличие новых полупроводниковых устройств и усовершенствований в конструкции устройств помогает снизить потери проводимости.
Для управления переключателями используется схема управления, известная как компенсационная схема. Этот блок играет ключевую роль в минимизации потерь, эффективной и качественной передаче мощности. Блок управления получает сигналы задания и обратной связи в качестве входных данных и выдает сигналы переключения в качестве выходных сигналов. Современные контроллеры в основном цифровые, в которых обратная связь преобразуется из аналогового сигнала в цифровой и вводится в процессор сигналов. Логика компенсации реализована в программном обеспечении, работающем на процессоре, и генерируются соответствующие сигналы переключения. Эти сигналы проходят через драйверы, чтобы обеспечить достаточную мощность для управления переключающими устройствами. Традиционно в компенсационных схемах используются аналоговые схемы с использованием операционных усилителей и компараторов. Подавая соответствующие управляющие сигналы на переключатели, схемы управления также следят за состоянием системы и блокируют выходную мощность при возникновении неисправностей.
Современные контроллеры в основном цифровые, в которых обратная связь преобразуется из аналогового сигнала в цифровой и вводится в процессор сигналов. Логика компенсации реализована в программном обеспечении, работающем на процессоре, и генерируются соответствующие сигналы переключения. Эти сигналы проходят через драйверы, чтобы обеспечить достаточную мощность для управления переключающими устройствами. Традиционно в компенсационных схемах используются аналоговые схемы с использованием операционных усилителей и компараторов. Подавая соответствующие управляющие сигналы на переключатели, схемы управления также следят за состоянием системы и блокируют выходную мощность при возникновении неисправностей.
Типы силовых электронных схем
1. Преобразователи переменного тока в постоянный
Входное переменное напряжение преобразуется в постоянное напряжение на требуемом уровне. Для этих приложений традиционно используется диодный мостовой выпрямитель. Но эта конфигурация приводит к токам с высокими пиковыми значениями и высоким содержанием гармоник. Повышающие преобразователи обычно используются для получения токов, которые находятся в фазе с переменным напряжением.
Но эта конфигурация приводит к токам с высокими пиковыми значениями и высоким содержанием гармоник. Повышающие преобразователи обычно используются для получения токов, которые находятся в фазе с переменным напряжением.
2. Преобразователи постоянного тока
Входная мощность постоянного тока, будь то нерегулируемая или регулируемая, на выходе преобразуется в регулируемую мощность постоянного тока. Без силовых электронных преобразователей очень сложно генерировать переменную мощность постоянного тока. Благодаря наличию различных конфигураций преобразователей постоянного тока, мощность постоянного тока на требуемом уровне стала незаменимой. Понижающий, повышающий и повышающе-понижающий преобразователи — это три основных преобразователя, которые могут понижать, повышать и обеспечивать оба уровня соответственно.
3. Преобразователи постоянного тока в переменный (обычно называемые инверторами)
Входная мощность постоянного тока от батарей инвертируется для обеспечения питания переменного тока.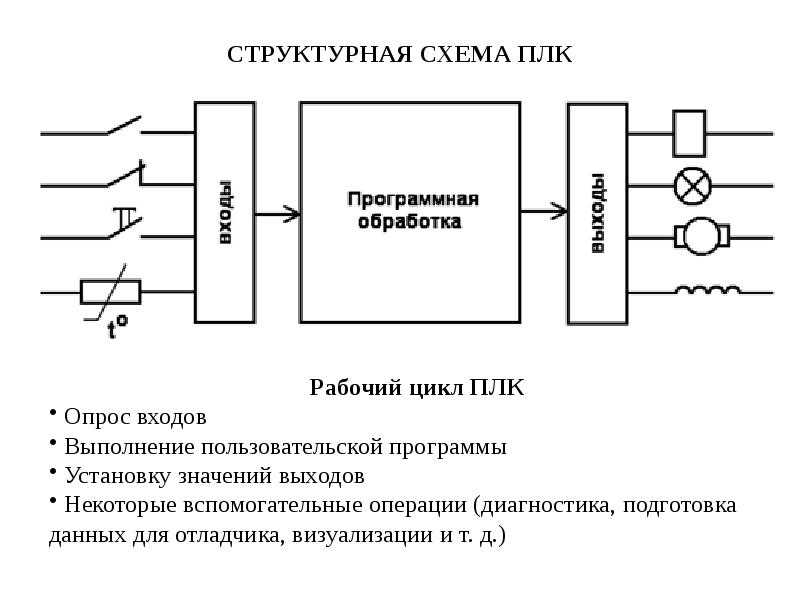 Эта мощность переменного тока используется для точного и эффективного управления двигателями переменного тока. Комбинация преобразователей переменного тока в постоянный и постоянного в переменный используется при передаче большой мощности, когда две разные сети соединяются, не беспокоясь о синхронизации.
Эта мощность переменного тока используется для точного и эффективного управления двигателями переменного тока. Комбинация преобразователей переменного тока в постоянный и постоянного в переменный используется при передаче большой мощности, когда две разные сети соединяются, не беспокоясь о синхронизации.
4. Преобразователи переменного тока в переменный (известные как циклопреобразователи)
Входной переменный ток с переменной амплитудой и частотой обрабатывается для получения выходного переменного тока с регулируемой амплитудой и частотой. Генерация энергии ветра - популярное применение этих типов преобразователей. Выходная мощность ветрогенератора изменяется как по величине, так и по частоте в зависимости от скорости ветра. Чтобы подключить эту мощность к сети или нагрузке, необходимо регулирование напряжения и частоты. Эту функциональность обеспечивают преобразователи переменного тока в переменный.
Другие классификации силовых преобразователей включают следующее:
1. На основе изоляции между входом и выходом:
На основе изоляции между входом и выходом:
- Неизолированные преобразователи
- Изолированные преобразователи
2. В зависимости от типа коммутации:
- Преобразователи с жесткой коммутацией
- Преобразователи с программным переключением
3. В зависимости от подключения к электросети:
- Преобразователи, подключенные к сети
- Автономные конвертеры
Важность силовой электроники
Стремление к большей электрификации привело к потребности в большем количестве электроэнергии. Помимо производства электроэнергии, обработка энергии играет ключевую роль в эффективном использовании доступной мощности. Важно, чтобы необработанная мощность была преобразована в форму, пригодную для использования в различных приложениях. Силовая электроника играет ключевую роль в обеспечении питания в соответствии с требуемыми характеристиками. Основным приложением, демонстрирующим значение силовой электроники в нашей повседневной жизни, является регулятор вентилятора. До появления полупроводниковых регуляторов вентиляторов использовались громоздкие резистивные регуляторы вентиляторов с потерями. Для управления скоростью вращения вентилятора сетевое напряжение переменного тока пропускается через резистор, включенный последовательно с вентилятором. Таким образом, при включенном вентиляторе происходит постоянное рассеивание мощности на последовательном резисторе. В исследованиях были предложены более инновационные способы управления вентиляторами или двигателями, в основном, путем управления напряжением и частотой. Это возможно при наличии силовых полупроводниковых приборов.
Основным приложением, демонстрирующим значение силовой электроники в нашей повседневной жизни, является регулятор вентилятора. До появления полупроводниковых регуляторов вентиляторов использовались громоздкие резистивные регуляторы вентиляторов с потерями. Для управления скоростью вращения вентилятора сетевое напряжение переменного тока пропускается через резистор, включенный последовательно с вентилятором. Таким образом, при включенном вентиляторе происходит постоянное рассеивание мощности на последовательном резисторе. В исследованиях были предложены более инновационные способы управления вентиляторами или двигателями, в основном, путем управления напряжением и частотой. Это возможно при наличии силовых полупроводниковых приборов.
В аэрокосмических приложениях, особенно в космических приложениях, размер, вес и надежность являются критическими параметрами. Если мощность обрабатывается на низких частотах, трансформаторы и другие элементы хранения энергии занимают огромное пространство. Импульсные преобразователи, работающие на высоких частотах коммутации, значительно уменьшают размеры элементов накопления энергии. Размер этих составляющих обратно пропорционален частоте коммутации. Таким образом, устройства с более коротким временем переключения помогают уменьшить общий размер и вес систем.
Импульсные преобразователи, работающие на высоких частотах коммутации, значительно уменьшают размеры элементов накопления энергии. Размер этих составляющих обратно пропорционален частоте коммутации. Таким образом, устройства с более коротким временем переключения помогают уменьшить общий размер и вес систем.
Современные силовые электронные системы способны работать с мощностью от нескольких ватт до нескольких мегаватт, обеспечивая эффективный и надежный интерфейс между необработанной и регулируемой мощностью. В результате гидравлические и механические приводы заменяются электродвигателями, которыми можно точно управлять с помощью силовых электронных интерфейсов.
Преимущества силовой электроники
Электроэнергии не хватает, и первостепенное значение имеет подача мощности на нагрузки с минимальными потерями. Успехи в исследованиях силовых полупроводников привели к созданию более эффективных химических элементов, таких как карбид кремния и нитрид галлия.