Как устроены импульсные регуляторы напряжения. Какие преимущества они имеют перед линейными стабилизаторами. Какие основные схемы импульсных регуляторов существуют. Каковы их ключевые характеристики и области применения.
Принцип работы импульсных регуляторов напряжения
Импульсные регуляторы напряжения основаны на принципе широтно-импульсной модуляции (ШИМ). В отличие от линейных стабилизаторов, работающих в аналоговом режиме, импульсные регуляторы используют ключевой режим работы силовых элементов.
Основные компоненты импульсного регулятора:
- Силовой ключ (обычно транзистор)
- Индуктивный накопитель энергии (дроссель)
- Выпрямительный диод
- Выходной конденсатор
- Схема управления ключом
Принцип работы заключается в периодическом накоплении энергии в индуктивности при замкнутом ключе и передаче ее в нагрузку при разомкнутом. Изменяя скважность импульсов управления ключом, можно регулировать выходное напряжение.
Преимущества импульсных регуляторов напряжения
- Высокий КПД (до 95% и выше)
- Малые габариты и вес
- Возможность как понижения, так и повышения напряжения
- Широкий диапазон входных напряжений
- Низкое тепловыделение
Благодаря этим преимуществам импульсные регуляторы находят широкое применение в современной электронике, особенно в портативных устройствах с батарейным питанием.
Основные типы импульсных регуляторов напряжения
Выделяют три основных типа импульсных регуляторов:
1. Понижающий (buck)
Преобразует входное напряжение в более низкое выходное. Используется, например, для получения напряжения питания процессора из напряжения шины питания.
2. Повышающий (boost)
Преобразует входное напряжение в более высокое выходное. Применяется, например, в LED-драйверах для питания светодиодных лент.
3. Инвертирующий (buck-boost)
Может как понижать, так и повышать напряжение. Полезен в системах с широким диапазоном входных напряжений.
Ключевые характеристики импульсных регуляторов
При выборе импульсного регулятора напряжения следует обращать внимание на следующие параметры:
- Диапазон входных напряжений
- Максимальный выходной ток
- КПД при различных нагрузках
- Частота преобразования
- Точность стабилизации выходного напряжения
- Уровень пульсаций выходного напряжения
Эти характеристики определяют эффективность работы регулятора и его пригодность для конкретного применения.
Схемы импульсных регуляторов напряжения
Рассмотрим несколько практических схем импульсных регуляторов напряжения:
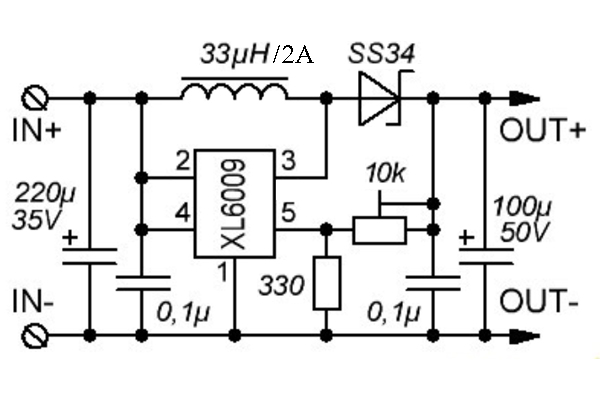
Понижающий регулятор на микросхеме LM2596
LM2596 — популярная микросхема для построения понижающих импульсных регуляторов. Рассмотрим типовую схему на ее основе:
Основные элементы схемы:
- Микросхема LM2596
- Индуктивность L (обычно 33-100 мкГн)
- Диод Шоттки D
- Выходной конденсатор C (обычно 220-470 мкФ)
Эта схема обеспечивает стабильное выходное напряжение при входном напряжении до 40В и токе нагрузки до 3А.
Применение импульсных регуляторов напряжения
Импульсные регуляторы напряжения широко используются в различных областях электроники:
- Источники питания компьютеров и ноутбуков
- Зарядные устройства для мобильных телефонов и планшетов
- Автомобильная электроника
- Светодиодные драйверы
- Системы питания промышленного оборудования
- Источники бесперебойного питания (ИБП)
Их применение позволяет создавать компактные и энергоэффективные устройства с длительным временем автономной работы.
Проектирование импульсных регуляторов напряжения
При разработке импульсного регулятора напряжения необходимо учитывать следующие аспекты:
- Выбор топологии схемы в зависимости от требований к входному и выходному напряжению
- Расчет параметров силовых компонентов (индуктивности, конденсаторов)
- Выбор силовых полупроводниковых элементов (транзисторов, диодов)
- Проектирование цепей обратной связи и компенсации
- Учет тепловых режимов работы компонентов
- Разработка печатной платы с учетом высокочастотных токов
Правильный подход к проектированию позволяет создать надежный и эффективный импульсный регулятор напряжения.
Проблемы и их решения при использовании импульсных регуляторов
Несмотря на множество преимуществ, импульсные регуляторы напряжения имеют ряд особенностей, которые необходимо учитывать:

Электромагнитные помехи (ЭМП)
Из-за высокочастотного переключения силовых элементов импульсные регуляторы могут создавать значительные электромагнитные помехи. Для их снижения применяют следующие меры:
- Экранирование компонентов
- Использование фильтров на входе и выходе
- Оптимизация разводки печатной платы
- Применение технологии мягкого переключения (soft-switching)
Пульсации выходного напряжения
Для уменьшения пульсаций выходного напряжения используют:
- Увеличение емкости выходного конденсатора
- Применение многофазных топологий
- Использование LC-фильтров на выходе
Стабильность работы при малых нагрузках
Некоторые импульсные регуляторы могут работать нестабильно при малых токах нагрузки. Для решения этой проблемы применяют:
- Режим прерывистых токов (Discontinuous Conduction Mode, DCM)
- Адаптивное изменение частоты преобразования
- Использование синхронных выпрямителей
Современные тенденции в развитии импульсных регуляторов
Технологии импульсных регуляторов напряжения постоянно совершенствуются. Основные направления развития:

- Повышение рабочих частот для уменьшения габаритов
- Интеграция силовых компонентов в микросхему
- Улучшение алгоритмов управления для повышения КПД
- Развитие цифровых методов управления
- Применение новых материалов (GaN, SiC) для силовых ключей
Эти тенденции позволяют создавать все более эффективные и компактные источники питания для современной электроники.
7 схем импульсных стабилизаторов напряжения
Благодаря высокому КПД импульсные стабилизаторы напряжения получают в последнее время все более широкое распространение, хотя они, как правило, сложнее и содержат большее число элементов. Поскольку в тепловую энергию преобразуется лишь малая доля подводимой к импульсному стабилизатору энергии, его выходные транзисторы меньше нагреваются, следовательно, за счет снижения площади теплоотводов снижаются масса и размеры устройства.
Ощутимым недостатком импульсных стабилизаторов является наличие на выходе высокочастотных пульсаций, что заметно сужает область их практического использования чаще всего импульсные стабилизаторы используют для питания устройств на цифровых микросхемах.
Стабилизатор с выходным напряжением, меньшим входного, можно собрать на трех транзисторах (рис. 6.1), два из которых (VT1, VT2) образуют ключевой регулирующий элемент, а третий (ѴТЗ) является усилителем сигнала рассогласования.
Рис. 6. 1. Схема импульсного стабилизатора напряжения с КПД 84%.
1. Схема импульсного стабилизатора напряжения с КПД 84%.
Устройство работает в автоколебательном режиме. Напряжение положительной обратной связи с коллектора составного транзистора ѴТ1 через конденсатор С2 поступает в цепь базы транзистора ѴТ2.
Элементом сравнения и усилителем сигнала рассогласования является каскад на транзисторе ѴТЗ. Его эмиттер подключен к источнику опорного напряжения стабилитрону VD2, а база к делителю выходного напряжения R5 R7.
В импульсных стабилизаторах регулирующий элемент работает в ключевом режиме, поэтому выходное напряжение регулируется изменением скважности работы ключа. Включением/выключением транзистора VT1 по сигналу транзистора ѴТЗ управляет транзистор ѴТ2. В моменты, когда транзистор ѴТ1 открыт, в дросселе L1, благодаря протеканию тока нагрузки, запасается электромагнитная энергия. После закрывания транзистора запасенная энергия через диод VD1 отдается в нагрузку. Пульсации выходного напряжения стабилизатора сглаживаются фильтром L1, СЗ.
Характеристики стабилизатора целиком определяются свойствами транзистора ѴТ1 и диода VD1, быстродействие которых должно быть максимальным. При входном напряжении 24 В, выходном 15 В и токе нагрузки 1 А измеренное значение КПД было равно 84%.
Дроссель L1 имеет 100 витков провода диаметром 0,63 мм на кольце К26х16х12 из феррита с магнитной проницаемостью 100. Его индуктивность при токе подмагничивания 1 А около 1 мГн.
Схема простого импульсного стабилизатора показана на рис. 6.2. Дроссели L1 и L2 намотаны на пластмассовых каркасах, помещенных в броневые магнитопроводы Б22 из феррита М2000НМ. Дроссель L1 содержит 18 витков жгута из 7 проводов ПЭВ-1 0,35. Между чашками его магнитопровода вложена прокладка толщиной 0,8 мм. Активное сопротивление обмотки дросселя L1 27 мОм. Дроссель L2 имеет 9 витков жгута из 10 проводов ПЭВ-1 0,35. Зазор между его чашками 0,2 мм, активное сопротивление обмотки 13 мОм. Прокладки можно изготовить из жесткого теплостойкого материала текстолита, слюды, электрокартона. Винт, скрепляющий чашки магнитопровода, должен быть из немагнитного материала.
Винт, скрепляющий чашки магнитопровода, должен быть из немагнитного материала.
Рис. 6.2. Схема простого ключевого стабилизатора напряжения с КПД 60%.
Для налаживания стабилизатора к его выходу подключают нагрузку сопротивлением 5…7 Ом и мощностью 10 Вт. Подбором резистора R7 устанавливают номинальное выходное напряжение, затем увеличивают ток нагрузки до 3 А и, подбирая величину конденсатора С4, устанавливают такую частоту генерации (примерно 18…20 кГц), при которой высокочастотные выбросы напряжения на конденсаторе СЗ минимальны.
Выходное напряжение стабилизатора можно довести до 8…10В, увеличив величину резистора R7 и установив новое значение рабочей частоты. При этом мощность, рассеиваемая на транзисторе ѴТЗ, также увеличится.
В схемах импульсных стабилизаторов желательно использовать электролитические конденсаторы К52-1. Необходимую величину емкости получают параллельным включением конденсаторов.
Основные технические характеристики:
Входное напряжение, В 15.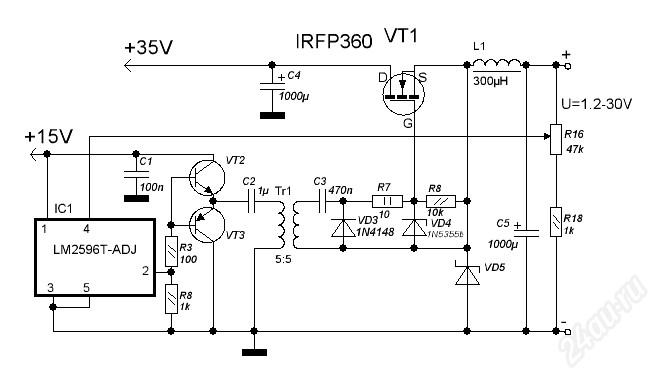 ..25.
..25.
Выходное напряжение, В 5.
Максимальный ток нагрузки, А 4.
Пульсации выходного напряжения при токе нагрузки 4 А во всем диапазоне входных напряжений, мВ, не более 50.
КПД, %, не ниже 60.
Рабочая частота при входном напряжении 20 б и токе нагрузки 3А, кГц—20.
В сравнении с предыдущим вариантом импульсного стабилизатора в новой конструкции А. А. Миронова (рис. 6.3) усовершенствованы и улучшены такие его характеристики, как КПД, стабильность выходного напряжения, длительность и характер переходного процесса при воздействии импульсной нагрузки.
Рис. 6.3. Схема импульсного стабилизатора напряжения.
Оказалось, что при работе прототипа (рис. 6.2) возникает так называемый сквозной ток через составной ключевой транзистор. Этот ток появляется в те моменты, когда по сигналу узла сравнения ключевой транзистор открывается, а коммутирующий диод еще не успел закрыться. Наличие такого тока вызывает дополнительные потери на нагревание транзистора и диода и уменьшает КПД устройства.
Еще один недостаток значительная пульсация выходного напряжения при токе нагрузки, близком к предельному. Для борьбы с пульсациями в стабилизатор (рис. 6.2) был введен дополнительный выходной LC-фильтр (L2, С5). Уменьшить нестабильность выходного напряжения от изменения тока нагрузки можно только уменьшением активного сопротивления дросселя L2. Улучшение динамики переходного процесса (в частности, уменьшение его длительности) связано с необходимостью уменьшения индуктивности дросселя, но при этом неизбежно увеличится пульсация выходного напряжения.
Поэтому оказалось целесообразным исключить этот выходной фильтр, а емкость конденсатора С2 увеличить в 5… 10 раз (параллельным соединением нескольких конденсаторов в батарею).
Цепь R2, С2 в исходном стабилизаторе (рис. 6.2) практически не изменяет длительности спада выходного тока, поэтому ее можно удалить (замкнуть резистор R2), а сопротивление резистора R3 увеличить до 820 Ом. Но тогда при увеличении входного напряжения с 15 6 до 25 6 ток, протекающий через резистор R3 (в исходном устройстве), будет увеличиваться в 1,7 раза, а мощность рассеивания в 3 раза (до 0,7 Вт). Подключением нижнего по схеме вывода резистора R3 (на схеме доработанного стабилизатора это резистор R2) к плюсовому выводу конденсатора С2 этот эффект можно ослабить, но при этом сопротивление R2 (рис. 6.3) должно быть уменьшено до 620 Ом.
Подключением нижнего по схеме вывода резистора R3 (на схеме доработанного стабилизатора это резистор R2) к плюсовому выводу конденсатора С2 этот эффект можно ослабить, но при этом сопротивление R2 (рис. 6.3) должно быть уменьшено до 620 Ом.
Один из эффективных путей борьбы со сквозным током увеличение времени нарастания тока через открывшийся ключевой транзистор. Тогда при полном открывании транзистора ток через диод VD1 уменьшится почти до нуля. Этого можно достигнуть, если форма тока через ключевой транзистор будет близка к треугольной. Как показывает расчет, для получения такой формы тока индуктивность накопительного дросселя L1 не должна превышать 30 мкГч.
Еще один путь применение более быстродействующего коммутирующего диода VD1, например, КД219Б (с барьером Шотки). У таких диодов выше быстродействие и меньше падение напряжения при одном и том же значении прямого тока по сравнению с обычными кремниевыми высокочастотными диодами. Конденсатор С2 типа К52-1.
Улучшение параметров устройства может быть получено и при изменении режима работы ключевого транзистора. Особенность работы мощного транзистора ѴТЗ в исходном и улучшенном стабилизаторах состоит в том, что он работает в активном режиме, а не в насыщенном, и поэтому имеет высокое значение коэффициента передачи тока и быстро закрывается. Однако из-за повышенного напряжения на нем в открытом состоянии рассеиваемая мощность в 1,5…2 раза превышает минимально достижимое значение.
Особенность работы мощного транзистора ѴТЗ в исходном и улучшенном стабилизаторах состоит в том, что он работает в активном режиме, а не в насыщенном, и поэтому имеет высокое значение коэффициента передачи тока и быстро закрывается. Однако из-за повышенного напряжения на нем в открытом состоянии рассеиваемая мощность в 1,5…2 раза превышает минимально достижимое значение.
Уменьшить напряжение на ключевом транзисторе можно подачей положительного (относительно плюсового провода питания) напряжения смещения на эмиттер транзистора ѴТ2 (см. рис. 6.3). Необходимую величину напряжения смещения подбирают при налаживании стабилизатора. Если он питается от выпрямителя, подключенного к сетевому трансформатору, то для получения напряжения смещения можно предусмотреть отдельную обмотку на трансформаторе. Однако при этом напряжение смещения будет изменяться вместе с сетевым.
Для получения стабильного напряжения смещения стабилизатор надо доработать (рис. 6.4), а дроссель превратить в трансформатор Т1, намотав дополнительную обмотку II. Когда ключевой транзистор закрыт, а диод VD1 открыт, напряжение на обмотке I определяется из выражения: U1=UBыx + U VD1. Поскольку напряжение на выходе и на диоде в это время меняется незначительно, то независимо от значения входного напряжения на обмотке II напряжение практически стабильно. После выпрямления его подают на эмиттер транзистора VT2 (и VT1).
Когда ключевой транзистор закрыт, а диод VD1 открыт, напряжение на обмотке I определяется из выражения: U1=UBыx + U VD1. Поскольку напряжение на выходе и на диоде в это время меняется незначительно, то независимо от значения входного напряжения на обмотке II напряжение практически стабильно. После выпрямления его подают на эмиттер транзистора VT2 (и VT1).
Рис. 6.4. Схема модифицированного импульсного стабилизатора напряжения.
Потери на нагрев снизились в первом варианте доработанного стабилизатора на 14,7%, а во втором на 24,2%, что позволяет им работать при токе нагрузки до 4 А без установки ключевого транзистора на теплоотвод.
В стабилизаторе варианта 1 (рис. 6.3) дроссель L1 содержит 11 витков, намотанных жгутом из восьми проводов ПЭВ-1 0,35. Обмотку помещают в броневой магнитопровод Б22 из феррита 2000НМ. Между чашками нужно заложить прокладку из текстолита толщиной 0,25 мм. В стабилизаторе варианта 2 (рис. 6.4) трансформатор Т1 образован намоткой поверх катушки дросселя L1 двух витков провода ПЭВ-1 0,35. Вместо германиевого диода Д310 можно использовать кремниевый, например, КД212А или КД212Б, при этом число витков обмотки II нужно увеличить до трех.
Вместо германиевого диода Д310 можно использовать кремниевый, например, КД212А или КД212Б, при этом число витков обмотки II нужно увеличить до трех.
Стабилизатор с широтно-импульсным управлением (рис. 6.5) по принципу действия близок к стабилизатору, описанному в, но, в отличие от него, имеет две цепи обратной связи, соединенные таким образом, что ключевой элемент закрывается при превышении напряжения на нагрузке или увеличении тока, потребляемого нагрузкой.
При подаче питания на вход устройства ток, текущий через резистор R3, открывает ключевой элемент, образованный транзисторами VT.1, VT2, в результате чего в цепи транзистор VT1 дроссель L1 нагрузка резистор R9 возникает ток. Происходит заряд конденсатора С4 и накопление энергии дросселем L1. Если сопротивление нагрузки достаточно большое, то напряжение на ней достигает 12 Б, и стабилитрон VD4 открывается. Это приводит к открыванию транзисторов VT5, ѴТЗ и закрыванию ключевого элемента, а благодаря наличию диода VD3 дроссель L1 отдает накопленную энергию нагрузке.
Рис. 6.5. Схема стабилизатора с широтно-импульсным управлением с КПД до 89%.
Технические характеристики стабилизатора:
Входное напряжение 15…25 В.
Выходное напряжение 12 6.
Номинальный ток загрузки 1 А.
Пульсации выходного напряжения при токе нагрузки 1 А 0,2 В. КПД (при UBX =18 6, Ін=1 А) 89%.
Потребляемый ток при UBX=18 В в режиме замыкания цепи нагрузки 0,4 А.
Выходной ток короткого замыкания (при UBX =18 6) 2,5 А.
По мере уменьшения тока через дроссель и разряда конденсатора С4 напряжение на нагрузке также уменьшится, что приведет к закрыванию транзисторов VT5, ѴТЗ и открыванию ключевого элемента. Далее процесс работы стабилизатора повторяется.
Конденсатор С3, снижающий частоту колебательного процесса, повышает эффективность стабилизатора.
При малом сопротивлении нагрузки колебательный процесс в стабилизаторе происходит иначе. Нарастание тока нагрузки приводит к увеличению падения напряжения на резисторе R9, открыванию транзистора ѴТ4 и закрыванию ключевого элемента. Далее процесс протекает аналогично описанному выше. Диоды VD1 и VD2 способствуют более резкому переходу устройства из режима стабилизации напряжения в режим ограничения тока.
Далее процесс протекает аналогично описанному выше. Диоды VD1 и VD2 способствуют более резкому переходу устройства из режима стабилизации напряжения в режим ограничения тока.
Во всех режимах работы стабилизатора потребляемый им ток меньше тока нагрузки. Транзистор ѴТ1 следует установить на теплоотводе размерами 40×25 мм.
Дроссель L1 представляет собой 20 витков жгута из трех проводов ПЭВ-2 0,47, помещенных в чашечный магнитопровод Б22 из феррита 1500НМЗ. Магнитопровод имеет зазор толщиной 0,5 мм из немагнитного материала.
Стабилизатор несложно перестроить на другое выходное напряжение и ток нагрузки. Выходное напряжение устанавливают выбором типа стабилитрона VD4, а максимальный ток нагрузки пропорциональным изменением сопротивления резистора R9 или подачей на базу транзистора ѴТ4 небольшого тока от отдельного параметрического стабилизатора через переменный резистор.
Для снижения уровня пульсаций выходного напряжения целесообразно применить LC-фильтр, аналогичный используемому в схеме на рис. 6.2.
6.2.
Рис. 6.6. Схема импульсного стабилизатора напряжения с КПД преобразования 69…72%.
Рис. 6.7. Схема импульсного стабилизатора напряжения с малыми пульсациями.
Импульсный стабилизатор напряжения (рис. 6.6) состоит из узла запуска (R3, VD1, ѴТ1, VD2), источника опорного напряжения и устройства сравнения (DD1.1, R1), усилителя постоянного тока (ѴТ2, DD1.2, ѴТ5), транзисторного ключа (ѴТЗ, ѴТ4), индуктивного накопителя энергии с коммутирующим диодом (VD3, L2) и фильтров входного (L1, С1, С2) и выходного (С4, С5, L3, С6). Частота переключения индуктивного накопителя энергии в зависимости от тока нагрузки находится в пределах 1,3…48 кГц.
Все катушки индуктивности L1 L3 одинаковы и намотаны в броневых магнитопроводах Б20 из феррита 2000НМ с зазором между чашками около 0,2 мм. Обмотки содержат по 20 витков жгута из четырех проводов ПЭВ-2 0,41. Можно применить также кольцевые ферритовые магнитопроводы с зазором.
Номинальное выходное напряжение 5 В при изменении входного от 8 до 60 б и КПД преобразования 69. ..72%. Коэффициент стабилизации 500. Амплитуда пульсаций выходного напряжения при токе нагрузки 0,7 А не более 5 мВ. Выходное сопротивление 20 мОм. Максимальный ток нагрузки (без теплоотводов для транзистора VT4 и диода VD3) 2 А.
..72%. Коэффициент стабилизации 500. Амплитуда пульсаций выходного напряжения при токе нагрузки 0,7 А не более 5 мВ. Выходное сопротивление 20 мОм. Максимальный ток нагрузки (без теплоотводов для транзистора VT4 и диода VD3) 2 А.
Импульсный стабилизатор напряжения (рис. 6.7) при входном напряжении 20…25 В обеспечивает на выходе стабильное напряжение 12 В при токе нагрузки 1,2 А. Пульсации на выходе до 2 мВ. Благодаря высокому КПД в устройстве не используются теплоотводы. Индуктивность дросселя L1 470 мкГч.
Аналоги транзисторов: ВС547 КТ3102А] ВС548В КТ3102В. Приблизительные аналоги транзисторов ВС807 КТ3107; BD244 КТ816.
Источник: Шустов М. А. Практическая схемотехника. Преобразователи напряжения.
Полупроводниковая схемотехника
Полупроводниковая схемотехника
ОглавлениеПредисловие редактора переводаЧасть I. Основные положения 1. Пояснение применяемых величин 2. Пассивные RC- и LRC- цепи 2.1. ФИЛЬТР НИЖНИХ ЧАСТОТ 2.1.3. ДЛИТЕЛЬНОСТЬ ФРОНТА ИМПУЛЬСА И ЧАСТОТА СРЕЗА ФИЛЬТРА 2.2. ФИЛЬТР ВЕРХНИХ ЧАСТОТ 2.4. ПАССИВНЫЙ ПОЛОСОВОЙ RC-ФИЛЬТР 2.5. МОСТ ВИНА-РОБИНСОНА 2.6. 2.7. КОЛЕБАТЕЛЬНЫЙ КОНТУР 3. Диоды 3.2. СТАБИЛИТРОНЫ 3.3. ВАРИКАПЫ 4. Транзистор и схемы на его основе 4.2. СХЕМА С ОБЩИМ ЭМИТТЕРОМ 4.2.2. НЕЛИНЕЙНЫЕ ИСКАЖЕНИЯ 4.2.3. СХЕМА С ОБЩИМ ЭМИТТЕРОМ И ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ТОКУ 4.2.4. ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ПО НАПРЯЖЕНИЮ 4.2.5. УСТАНОВКА РАБОЧЕЙ ТОЧКИ 4.3. СХЕМА С ОБЩЕЙ БАЗОЙ 4.4. СХЕМА С ОБЩИМ КОЛЛЕКТОРОМ, ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ 4.5. ТРАНЗИСТОР КАК ИСТОЧНИК СТАБИЛЬНОГО ТОКА 4.5.2. БИПОЛЯРНЫЙ ИСТОЧНИК ПИТАНИЯ 4.5.3. СХЕМА «ТОКОВОГО ЗЕРКАЛА» 4.6. СХЕМА ДАРЛИНГТОНА 4.7. ДИФФЕРЕНЦИАЛЬНЫЕ УСИЛИТЕЛИ 4.7.2. РЕЖИМ БОЛЬШОГО СИГНАЛА 4.7.3. ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ С ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ТОКУ 4.7.4. НАПРЯЖЕНИЕ РАЗБАЛАНСА 4.8. ИЗМЕРЕНИЕ НЕКОТОРЫХ ПАРАМЕТРОВ ПРИ МАЛОМ СИГНАЛЕ 4.9. ШУМЫ ТРАНЗИСТОРА 4.10. ПРЕДЕЛЬНЫЕ ПАРАМЕТРЫ 5. Полевые транзисторы 5.2. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ МАЛЫХ СИГНАЛОВ 5.3.  ПРЕДЕЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ ПАРАМЕТРЫ ПРЕДЕЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ ПАРАМЕТРЫ5.4. ОСНОВНЫЕ СХЕМЫ ВКЛЮЧЕНИЯ 5.4.1. СХЕМА С ОБЩИМ ИСТОКОМ 5.4.2. СХЕМА С ОБЩИМ ЗАТВОРОМ 5.4.3. СХЕМА С ОБЩИМ СТОКОМ, ИСТОКОВЫЙ ПОВТОРИТЕЛЬ 5.5. ПОЛЕВОЙ ТРАНЗИСТОР КАК СТАБИЛИЗАТОР ТОКА 5.6. ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ НА ПОЛЕВЫХ ТРАНЗИСТОРАХ 5.7. ПОЛЕВОЙ ТРАНЗИСТОР В КАЧЕСТВЕ УПРАВЛЯЕМОГО СОПРОТИВЛЕНИЯ 6. Операционный усилитель 6.1. СВОЙСТВА ОПЕРАЦИОННОГО УСИЛИТЕЛЯ 6.2. ПРИНЦИП ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗИ 6.3. НЕИНВЕРТИРУЮЩИЙ УСИЛИТЕЛЬ 6.4. ИНВЕРТИРУЮЩИЙ УСИЛИТЕЛЬ 7. Внутренняя структура операционных усилителей 7.3. СТАНДАРТНАЯ СХЕМА ИНТЕГРАЛЬНОГО ОПЕРАЦИОННОГО УСИЛИТЕЛЯ 7.4. КОРРЕКЦИЯ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ 7.4.2. ПОЛНАЯ ЧАСТОТНАЯ КОРРЕКЦИЯ 7.4.3. ПОДСТРАИВАЕМАЯ ЧАСТОТНАЯ КОРРЕКЦИЯ 7.4.4. СКОРОСТЬ НАРАСТАНИЯ 7.4.5. КОМПЕНСАЦИЯ ЕМКОСТНОЙ НАГРУЗКИ 7.5. ИЗМЕРЕНИЕ ПАРАМЕТРОВ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ 8. Простейшие переключающие схемы 8.  1. ТРАНЗИСТОРНЫЙ КЛЮЧ 1. ТРАНЗИСТОРНЫЙ КЛЮЧ8.2. БИСТАБИЛЬНЫЕ РЕЛАКСАЦИОННЫЕ СХЕМЫ 8.2.2. ТРИГГЕР ШМИТТА 8.3. МОНОСТАБИЛЬНАЯ РЕЛАКСАЦИОННАЯ СХЕМА 8.4. НЕСТАБИЛЬНАЯ РЕЛАКСАЦИОННАЯ СХЕМА 9. Базовые логические схемы 9.1. ОСНОВНЫЕ ЛОГИЧЕСКИЕ ФУНКЦИИ 9.2. СОСТАВЛЕНИЕ ЛОГИЧЕСКИХ ФУНКЦИЙ 9.2.1. ТАБЛИЦА КАРНО 9.3. ПРОИЗВОДНЫЕ ОСНОВНЫХ ЛОГИЧЕСКИХ ФУНКЦИЙ 9.4. СХЕМОТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ ОСНОВНЫХ ЛОГИЧЕСКИХ ФУНКЦИЙ 9.4.1. РЕЗИСТИВНО-ТРАНЗИСТОРНАЯ ЛОГИКА (РТЛ) 9.4.2. ДИОДНО-ТРАНЗИСТОРНАЯ ЛОГИКА (ДТЛ) 9.4.3. ТРАНЗИСТОРНО-ТРАНЗИСТОРНАЯ ЛОГИКА (ТТЛ) 9.4.4. ИНТЕГРАЛЬНАЯ ИНЖЕКЦИОННАЯ ЛОГИКА 9.4.5. ЭМИТТЕРНО-СВЯЗАННАЯ ЛОГИКА (ЭСЛ) 9.4.6. n-КАНАЛЬНАЯ МОП-ЛОГИКА 9.4.7. КОМПЛЕМЕНТАРНАЯ МОП-ЛОГИКА (КМОП) 9.4.8. ОБЗОР 9.4.9. СПЕЦИАЛЬНЫЕ СХЕМЫ ВЫХОДНЫХ КАСКАДОВ 9.5. ИНТЕГРАЛЬНЫЕ ТРИГГЕРЫ 9.5.2. ТРИГГЕРЫ ТИПА M-S (MASTER-SLAVE) 9.5.3. ДИНАМИЧЕСКИЙ ТРИГГЕР 9.6. ПОЛУПРОВОДНИКОВЫЕ ЗАПОМИНАЮЩИЕ УСТРОЙСТВА 9.6.2. ПОСТОЯННЫЕ ЗАПОМИНАЮЩИЕ УСТРОЙСТВА (ПЗУ) 9.  6.3. ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ МАТРИЦЫ (ПЛМ) 6.3. ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ МАТРИЦЫ (ПЛМ)10. Оптоэлектронные приборы 10.1. ОСНОВНЫЕ ПОНЯТИЯ ФОТОМЕТРИИ 10.2. ФОТОРЕЗИСТОР 10.3. ФОТОДИОДЫ 10.4. ФОТОТРАНЗИСТОРЫ 10.5. СВЕТОДИОДЫ 10.6. ОПТРОНЫ Часть II. Применения 11. Линейные и нелинейные аналоговые вычислительные схемы 11.1. СХЕМА СУММИРОВАНИЯ 11.2. СХЕМЫ ВЫЧИТАНИЯ 11.2.2. СХЕМА ВЫЧИТАНИЯ НА ОПЕРАЦИОННОМ УСИЛИТЕЛЕ 11.3. БИПОЛЯРНОЕ УСИЛИТЕЛЬНОЕ ЗВЕНО 11.4. СХЕМЫ ИНТЕГРИРОВАНИЯ 11.4.1. ИНВЕРТИРУЮЩИЙ ИНТЕГРАТОР 11.4.2. ЗАДАНИЕ НАЧАЛЬНЫХ УСЛОВИЙ 11.4.3. СУММИРУЮЩИЙ ИНТЕГРАТОР 11.4.4. НЕИНВЕРТИРУЮЩИЙ ИНТЕГРАТОР 11.5. СХЕМЫ ДИФФЕРЕНЦИРОВАНИЯ 11.5.3. СХЕМА ДИФФЕРЕНЦИРОВАНИЯ С ВЫСОКИМ ВХОДНЫМ СОПРОТИВЛЕНИЕМ 11.6. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 11.7. ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ 11.7.2. ЭКСПОНЕНТА 11.7.3. ВЫЧИСЛЕНИЕ СТЕПЕННЫХ ФУНКЦИЙ С ПОМОЩЬЮ ЛОГАРИФМОВ 11.7.4. ФУНКЦИИ SIN X И COS X 11.7.5. ПЕРЕСТРАИВАЕМЫЕ ФУНКЦИОНАЛЬНЫЕ СХЕМЫ 11.  8. АНАЛОГОВЫЕ СХЕМЫ УМНОЖЕНИЯ 8. АНАЛОГОВЫЕ СХЕМЫ УМНОЖЕНИЯ11.8.2. УМНОЖЕНИЕ С ПОМОЩЬЮ ЛОГАРИФМИЧЕСКИХ ФУНКЦИОНАЛЬНЫХ ГЕНЕРАТОРОВ 11.8.3. СХЕМА УМНОЖЕНИЯ, ИСПОЛЬЗУЮЩАЯ ИЗМЕНЕНИЕ КРУТИЗНЫ ХАРАКТЕРИСТИКИ ТРАНЗИСТОРОВ 11.8.4. СХЕМА УМНОЖЕНИЯ С ИЗОЛИРОВАННЫМИ ЗВЕНЬЯМИ 11.8.5. БАЛАНСИРОВКА СХЕМ УМНОЖЕНИЯ 11.8.6. СХЕМЫ ЧЕТЫРЕХКВАДРАНТНОГО УМНОЖЕНИЯ 11.8.7. ПРИМЕНЕНИЕ СХЕМЫ УМНОЖЕНИЯ ДЛЯ ДЕЛЕНИЯ И ИЗВЛЕЧЕНИЯ КВАДРАТНЫХ КОРНЕЙ 11.9. ПРЕОБРАЗОВАНИЕ КООРДИНАТ 11.9.2. ПРЕОБРАЗОВАНИЕ ДЕКАРТОВЫХ КООРДИНАТ В ПОЛЯРНЫЕ 12. Управляемые источники и схемы преобразования полного сопротивления 12.1. ИСТОЧНИКИ НАПРЯЖЕНИЯ, УПРАВЛЯЕМЫЕ НАПРЯЖЕНИЕМ 12.2. ИСТОЧНИКИ НАПРЯЖЕНИЯ, УПРАВЛЯЕМЫЕ ТОКОМ 12.3. ИСТОЧНИКИ ТОКА, УПРАВЛЯЕМЫЕ НАПРЯЖЕНИЕМ 12.3.2. ИСТОЧНИКИ ТОКА С ЗАЗЕМЛЕННОЙ НАГРУЗКОЙ 12.3.3. ЭТАЛОННЫЕ ИСТОЧНИКИ ТОКА НА ТРАНЗИСТОРАХ 12.3.4. ПЛАВАЮЩИЕ ИСТОЧНИКИ ТОКА 12.4. ИСТОЧНИКИ ТОКА, УПРАВЛЯЕМЫЕ ТОКОМ 12.5. ПРЕОБРАЗОВАТЕЛЬ ОТРИЦАТЕЛЬНОГО СОПРОТИВЛЕНИЯ (NIC) 12.6. ГИРАТОР 12.  7. ЦИРКУЛЯТОР 7. ЦИРКУЛЯТОР13. Активные фильтры 13.1. ТЕОРЕТИЧЕСКОЕ ОПИСАНИЕ ФИЛЬТРОВ НИЖНИХ ЧАСТОТ 13.1.1. ФИЛЬТР БАТТЕРВОРТА 13.1.2. ФИЛЬТР ЧЕБЫШЕВА 13.1.3. ФИЛЬТРЫ БЕССЕЛЯ 13.1.4. ОБОБЩЕННОЕ ОПИСАНИЕ ФИЛЬТРОВ 13.2. ПРЕОБРАЗОВАНИЕ НИЖНИХ ЧАСТОТ В ВЕРХНИЕ 13.3. РЕАЛИЗАЦИЯ ФИЛЬТРОВ НИЖНИХ И ВЕРХНИХ ЧАСТОТ ПЕРВОГО ПОРЯДКА 13.4. РЕАЛИЗАЦИЯ ФИЛЬТРОВ НИЖНИХ И ВЕРХНИХ ЧАСТОТ ВТОРОГО ПОРЯДКА 13.4.2. ФИЛЬТР СО СЛОЖНОЙ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 13.4.3. ФИЛЬТР С ПОЛОЖИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 13.4.4. ФИЛЬТР НИЖНИХ ЧАСТОТ С ОМИЧЕСКОЙ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 13.5. РЕАЛИЗАЦИЯ ФИЛЬТРОВ ВЕРХНИХ И НИЖНИХ ЧАСТОТ БОЛЕЕ ВЫСОКОГО ПОРЯДКА 13.6. ПРЕОБРАЗОВАНИЕ ФИЛЬТРА НИЖНИХ ЧАСТОТ В ПОЛОСОВОЙ ФИЛЬТР 13.6.1. ПОЛОСОВОЙ ФИЛЬТР ВТОРОГО ПОРЯДКА 13.6.2. ПОЛОСОВОЙ ФИЛЬТР ЧЕТВЕРТОГО ПОРЯДКА 13.7. РЕАЛИЗАЦИЯ ПОЛОСОВЫХ ФИЛЬТРОВ ВТОРОГО ПОРЯДКА 13.7.2. ПОЛОСОВОЙ ФИЛЬТР СО СЛОЖНОЙ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 13.7.3. ПОЛОСОВОЙ ФИЛЬТР С ПОЛОЖИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 13. 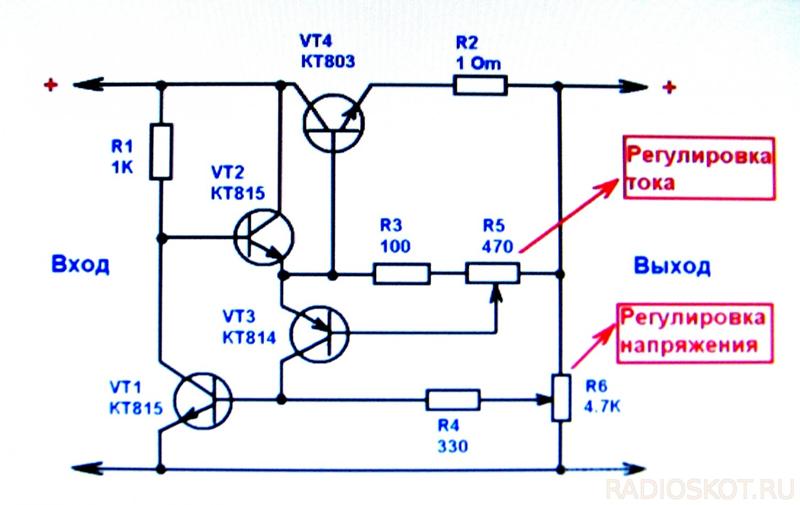 7.4. ПОЛОСОВОЙ ФИЛЬТР С ОМИЧЕСКОЙ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 7.4. ПОЛОСОВОЙ ФИЛЬТР С ОМИЧЕСКОЙ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ13.8. ПРЕОБРАЗОВАНИЕ ФИЛЬТРОВ НИЖНИХ ЧАСТОТ В ЗАГРАЖДАЮЩИЕ ПОЛОСОВЫЕ ФИЛЬТРЫ 13.9. РЕАЛИЗАЦИЯ ЗАГРАЖДАЮЩИХ ФИЛЬТРОВ ВТОРОГО ПОРЯДКА 13.9.1. ЗАГРАЖДАЮЩИЙ LRC-ФИЛЬТР 13.9.2. АКТИВНЫЙ ЗАГРАЖДАЮЩИЙ ФИЛЬТР С ДВОЙНЫМ Т-ОБРАЗНЫМ МОСТОМ 13.9.3. АКТИВНЫЙ ЗАГРАЖДАЮЩИЙ ФИЛЬТР С МОСТОМ ВИНА-РОБИНСОНА 13.10. ФАЗОВЫЙ ФИЛЬТР 13.10.2. РЕАЛИЗАЦИЯ ФАЗОВОГО ФИЛЬТРА ПЕРВОГО ПОРЯДКА 13.10.3. РЕАЛИЗАЦИЯ ФАЗОВОГО ФИЛЬТРА ВТОРОГО ПОРЯДКА 13.11. ПЕРЕСТРАИВАЕМЫЙ УНИВЕРСАЛЬНЫЙ ФИЛЬТР 14. Широкополосные усилители 14.1. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА УСИЛЕНИЯ ПО ТОКУ ОТ ЧАСТОТЫ 14.2. ВЛИЯНИЕ ВНУТРЕННИХ ЕМКОСТЕЙ ТРАНЗИСТОРА И ЕМКОСТЕЙ МОНТАЖА 14.3. КАСКОДНАЯ СХЕМА 14.4. ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ КАК ШИРОКОПОЛОСНЫЙ УСИЛИТЕЛЬ 14.5. СИММЕТРИЧНЫЙ ШИРОКОПОЛОСНЫЙ УСИЛИТЕЛЬ 14.5.2. ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ С ИНВЕРТОРОМ 14.5.3. ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ С КОМПЛЕМЕНТАРНОЙ КАСКОДНОЙ СХЕМОЙ 14.5.  4. ДВУХТАКТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ 4. ДВУХТАКТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ14.6. ШИРОКОПОЛОСНЫЙ ПОВТОРИТЕЛЬ НАПРЯЖЕНИЯ 14.6.2. ДВУХТАКТНЫЙ ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ 14.7. ШИРОКОПОЛОСНЫЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ 15. Усилители мощности 15.1. ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ КАК УСИЛИТЕЛЬ МОЩНОСТИ 15.2. КОМПЛЕМЕНТАРНЫЙ ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ 15.2.2. КОМПЛЕМЕНТАРНЫЙ ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ В РЕЖИМЕ AB 15.2.3. СПОСОБЫ ЗАДАНИЯ НАПРЯЖЕНИЯ СМЕЩЕНИЯ 15.3. СХЕМЫ ОГРАНИЧЕНИЯ ТОКА 15.4. КОМПЛЕМЕНТАРНЫЙ ЭМИТТЕРНЫЙ ПОВТОРИТЕЛЬ ПО СХЕМЕ ДАРЛИНГТОНА 15.5. РАСЧЕТ МОЩНОГО ОКОНЕЧНОГО КАСКАДА 15.6. СХЕМЫ ПРЕДВАРИТЕЛЬНЫХ УСИЛИТЕЛЕЙ НАПРЯЖЕНИЯ 15.7. ПОВЫШЕНИЕ НАГРУЗОЧНОЙ СПОСОБНОСТИ ИНТЕГРАЛЬНЫХ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ 16. Источники питания 16.1. СВОЙСТВА СЕТЕВЫХ ТРАНСФОРМАТОРОВ 16.2. ВЫПРЯМИТЕЛИ 16.2.1. ОДНОПОЛУПЕРИОДНЫЙ ВЫПРЯМИТЕЛЬ 16.2.2. МОСТОВОЙ ВЫПРЯМИТЕЛЬ 16.2.3. МОСТОВОЙ ВЫПРЯМИТЕЛЬ ДЛЯ ДВУХ СИММЕТРИЧНЫХ ОТНОСИТЕЛЬНО ЗЕМЛИ ВЫХОДНЫХ НАПРЯЖЕНИЙ 16.3. ПОСЛЕДОВАТЕЛЬНАЯ СТАБИЛИЗАЦИЯ НАПРЯЖЕНИЯ 16.  3.2. СХЕМА С РЕГУЛИРУЮЩИМ УСИЛИТЕЛЕМ 3.2. СХЕМА С РЕГУЛИРУЮЩИМ УСИЛИТЕЛЕМ16.3.3. ИНТЕГРАЛЬНЫЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ 16.3.4. СТАБИЛИЗАТОР С МАЛЫМ НАПРЯЖЕНИЕМ ПОТЕРЬ 16.3.5. СТАБИЛИЗАЦИЯ НАПРЯЖЕНИЙ, СИММЕТРИЧНЫХ ОТНОСИТЕЛЬНО ЗЕМЛИ 16.3.6. СТАБИЛИЗАТОР НАПРЯЖЕНИЯ С ИЗМЕРИТЕЛЬНЫМИ ВЫВОДАМИ 16.3.7. ЛАБОРАТОРНЫЕ ИСТОЧНИКИ ПИТАНИЯ 16.3.8. ОКОНЕЧНЫЙ КАСКАД ЛАБОРАТОРНОГО ИСТОЧНИКА ПИТАНИЯ С БОЛЬШОЙ ВЫХОДНОЙ МОЩНОСТЬЮ 16.4. ПОЛУЧЕНИЕ ОПОРНОГО НАПРЯЖЕНИЯ 16.4.2. ПОЛУЧЕНИЕ МАЛЫХ ОПОРНЫХ НАПРЯЖЕНИЙ 16.5. ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ 16.5.2. ПЕРВИЧНЫЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ 17. Аналоговые коммутаторы и компараторы 17.2. ЭЛЕКТРОННЫЕ КОММУТАТОРЫ 17.2.2. ДИОДНЫЙ КОММУТАТОР 17.2.3. КОММУТАТОР НА БИПОЛЯРНЫХ ТРАНЗИСТОРАХ 17.3. АНАЛОГОВЫЕ КОММУТАТОРЫ НА БАЗЕ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ 17.3.2. КОММУТАТОР НА ПОЛЕВОМ ТРАНЗИСТОРЕ С ПЕРЕМЕНОЙ ЗНАКА ВЫХОДНОГО НАПРЯЖЕНИЯ 17.3.3. КОММУТАТОР НА БАЗЕ ДИФФЕРЕНЦИАЛЬНОГО УСИЛИТЕЛЯ 17.4. АНАЛОГОВЫЕ КОММУТАТОРЫ С ПАМЯТЬЮ 17.5. КОМПАРАТОРЫ 17.  5.2. КОМПАРАТОР С ПРЕЦИЗИОННЫМ ВЫХОДНЫМ НАПРЯЖЕНИЕМ 5.2. КОМПАРАТОР С ПРЕЦИЗИОННЫМ ВЫХОДНЫМ НАПРЯЖЕНИЕМ17.5.3. ДВУХПОРОГОВЫЙ КОМПАРАТОР 17.6. ТРИГГЕР ШМИТТА 17.6.1. ИНВЕРТИРУЮЩИЙ ТРИГГЕР ШМИТТА 17.6.2. НЕИНВЕРТИРУЮЩИЙ ТРИГГЕР ШМИТТА 17.6.3. ПРЕЦИЗИОННЫЙ ТРИГГЕР ШМИТТА 18. Генераторы сигналов 18.1. LC-ГЕНЕРАТОРЫ 18.1.2. ГЕНЕРАТОР С ТРАНСФОРМАТОРНОЙ СВЯЗЬЮ (СХЕМА МАЙССНЕРА) 18.1.3. ТРЕХТОЧЕЧНАЯ СХЕМА С ИНДУKТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ (СХЕМА ХАРТЛИ) 18.1.4. ТРЕХТОЧЕЧНАЯ СХЕМА С ЕМКОСТНОЙ ОБРАТНОЙ СВЯЗЬЮ (СХЕМА КОЛПИТЦА) 18.1.5. LC-ГЕНЕРАТОР С ЭМИТТЕРНОЙ СВЯЗЬЮ 18.1.6. ДВУХТАКТНЫЕ ГЕНЕРАТОРЫ 18.2. КВАРЦЕВЫЕ ГЕНЕРАТОРЫ 18.2.1. ЭЛЕКТРИЧЕСКИЕ СВОЙСТВА КВАРЦЕВОГО РЕЗОНАТОРА 18.2.2. КВАРЦЕВЫЕ ГЕНЕРАТОРЫ С LC-КОЛЕБАТЕЛЬНЫМ КОНТУРОМ 18.2.3. КВАРЦЕВЫЕ ГЕНЕРАТОРЫ БЕЗ LC-КОНТУРА 18.3. СИНУСОИДАЛЬНЫЕ RC-ГЕНЕРАТОРЫ 18.3.2. МОДЕЛИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ СИНУСОИДАЛЬНЫХ КОЛЕБАНИЙ 18.4. ГЕНЕРАТОРЫ СИГНАЛОВ СПЕЦИАЛЬНОЙ ФОРМЫ (ФУНКЦИОНАЛЬНЫЕ ГЕНЕРАТОРЫ) 18.4.2. ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР С УПРАВЛЯЕМОЙ ЧАСТОТОЙ ВЫХОДНОГО СИГНАЛА 18.  4.3. ВЫСОКОЧАСТОТНЫЙ ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР 4.3. ВЫСОКОЧАСТОТНЫЙ ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР18.5. МУЛЬТИВИБРАТОРЫ 18.5.1. НИЗКОЧАСТОТНЫЕ МУЛЬТИВИБРАТОРЫ 18.5.2. ВЫСОКОЧАСТОТНЫЕ МУЛЬТИВИБРАТОРЫ 19. Комбинационные логические схемы 19.1. ПРЕОБРАЗОВАТЕЛИ КОДОВ 19.1.2. ДВОИЧНО-ДЕСЯТИЧНЫЕ КОДЫ 19.1.3. КОД ГРЕЯ 19.2. МУЛЬТИПЛЕКСОР И ДЕМУЛЬТИПЛЕКСОР 19.3. КОМБИНАЦИОННОЕ УСТРОЙСТВО СДВИГА 19.4. КОМПАРАТОРЫ 19.5. СУММАТОРЫ 19.5.1. ПОЛУСУММАТОР 19.5.2. ПОЛНЫЙ СУММАТОР 19.5.3. СУММАТОРЫ С ПАРАЛЛЕЛЬНЫМ ПЕРЕНОСОМ 19.5.4. СЛОЖЕНИЕ ДВОИЧНО-ДЕСЯТИЧНЫХ ЧИСЕЛ 19.5.5. ВЫЧИТАНИЕ 19.5.6. СЛОЖЕНИЕ ЧИСЕЛ С ЛЮБЫМИ ЗНАКАМИ 19.6. УМНОЖИТЕЛИ 19.7. ЦИФРОВЫЕ ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ 20. Интегральные схемы со структурами последовательностного типа 20.1. ДВОИЧНЫЕ СЧЕТЧИКИ 20.1.1. АСИНХРОННЫЙ (ПОСЛЕДОВАТЕЛЬНЫЙ) СЧЕТЧИК 20.1.2. СИНХРОННЫЙ (ПАРАЛЛЕЛЬНЫЙ) СЧЕТЧИК 20.2. ДВОИЧНО-ДЕСЯТИЧНЫЙ СЧЕТЧИК В КОДЕ 8421 20.2.1. АСИНХРОННЫЙ ДВОИЧНО-ДЕСЯТИЧНЫЙ СЧЕТЧИК 20.2.  2. СИНХРОННЫЙ ДВОИЧНО-ДЕСЯТИЧНЫЙ СЧЕТЧИК 2. СИНХРОННЫЙ ДВОИЧНО-ДЕСЯТИЧНЫЙ СЧЕТЧИК20.3. СЧЕТЧИК С ПРЕДВАРИТЕЛЬНОЙ УСТАНОВКОЙ 20.4. РЕГИСТРЫ СДВИГА 20.4.2. КОЛЬЦЕВОЙ РЕГИСТР 20.4.3. РЕГИСТР СДВИГА С ПАРАЛЛЕЛЬНЫМ ВВОДОМ 20.4.4. РЕГИСТР СДВИГА С ПЕРЕКЛЮЧАЕМЫМ НАПРАВЛЕНИЕМ СДВИГА 20.5. ПОЛУЧЕНИЕ ПСЕВДОСЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ 20.6. ПЕРВОНАЧАЛЬНАЯ ОБРАБОТКА АСИНХРОННОГО СИГНАЛА 20.6.2. СИНХРОНИЗАЦИЯ ИМПУЛЬСОВ 20.6.3. СИНХРОННЫЙ ОДНОВИБРАТОР 20.6.4. СИНХРОННЫЙ ДЕТЕКТОР ИЗМЕНЕНИЙ 20.6.5. СИНХРОННЫЙ ТАКТОВЫЙ ПЕРЕКЛЮЧАТЕЛЬ 20.7. СИСТЕМАТИЧЕСКИЙ СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОСТНЫХ СХЕМ 20.7.2. ПРИМЕР СИНТЕЗА ПЕРЕКЛЮЧАЕМОГО СЧЕТЧИКА 20.7.3. СОКРАЩЕНИЕ ЕМКОСТИ ПАМЯТИ 21. Микро-ЭВМ 21.1. ОСНОВНАЯ СТРУКТУРА МИКРО-ЭВМ 21.2. ПРИНЦИП ДЕЙСТВИЯ МИКРОПРОЦЕССОРА 21.3. НАБОР КОМАНД 21.4. ОТЛАДОЧНЫЕ СРЕДСТВА 21.5. ОБЗОР МИКРОПРОЦЕССОРОВ РАЗЛИЧНОГО ТИПА 21.6. МОДУЛЬНОЕ ПОСТРОЕНИЕ МИКРО-ЭВМ 21.7. ПЕРИФЕРИЙНЫЕ УСТРОЙСТВА 21.7.1. ПАРАЛЛЕЛЬНЫЙ ИНТЕРФЕЙС 21.7.2. ПОСЛЕДОВАТЕЛЬНЫЙ ИНТЕРФЕЙС 21. 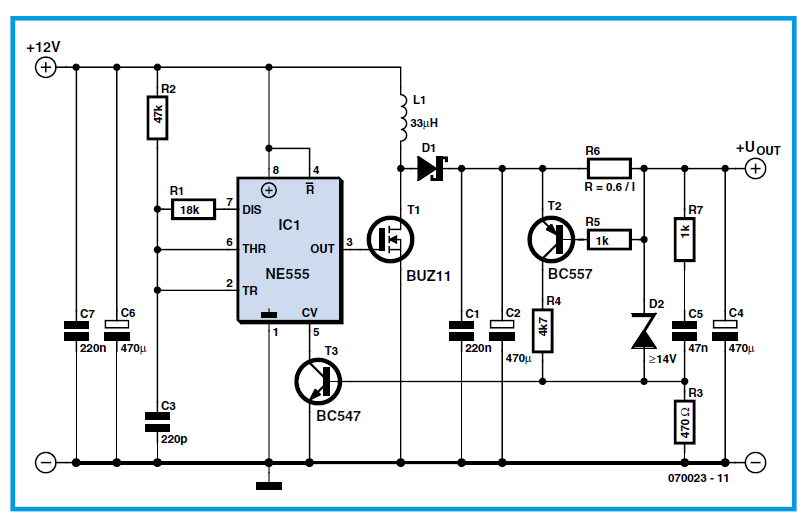 7.3. ИНТЕРФЕЙС МАГИСТРАЛИ «ОБЩАЯ ШИНА» 7.3. ИНТЕРФЕЙС МАГИСТРАЛИ «ОБЩАЯ ШИНА»21.7.4. ПРОГРАММИРУЕМЫЙ СЧЕТЧИК 21.7.5. ПОДКЛЮЧЕНИЕ ПЕРИФЕРИЙНЫХ МОДУЛЕЙ СЕМЕЙСТВА 8080 К МАГИСТРАЛЯМ СЕМЕЙСТВА 6800 21.7.6. ОБЗОР ПЕРИФЕРИЙНЫХ УСТРОЙСТВ 21.8. МИНИМАЛЬНЫЕ СИСТЕМЫ 21.8.2. ОДНОКРИСТАЛЬНАЯ МИКРО-ЭВМ 22. Цифровые фильтры 22.1. ТЕОРЕМА О ДИСКРЕТИЗАЦИИ (ТЕОРЕМА О ВЫБОРКАХ) 22.1.2. ПРАКТИЧЕСКИЕ СООБРАЖЕНИЯ 22.2. ЦИФРОВАЯ ФУНКЦИЯ ПЕРЕДАЧИ ФИЛЬТРА 22.3. БИЛИНЕЙНОЕ ПРЕОБРАЗОВАНИЕ 22.4. РЕАЛИЗАЦИЯ ЦИФРОВЫХ ФИЛЬТРОВ 22.4.2. СТРУКТУРА ЦИФРОВЫХ ФИЛЬТРОВ ВТОРОГО ПОРЯДКА 22.4.3. ПРАКТИЧЕСКИЕ СООБРАЖЕНИЯ 23. Передача данных и индикация 23.1. СОЕДИНИТЕЛЬНЫЕ ЛИНИИ 23.2. ЗАЩИТА ДАННЫХ 23.2.2. КОД ХЕММИНГА 23.3. СТАТИЧЕСКИЕ ЦИФРОВЫЕ ИНДИКАТОРЫ 23.3.1. ДВОИЧНЫЕ ИНДИКАТОРЫ НА СВЕТОДИОДАХ 23.3.2. ДЕКАДНЫЕ ИНДИКАТОРЫ 23.3.3. ИНДИКАЦИЯ В ШЕСТНАДЦАТЕРИЧНОМ КОДЕ 23.4. МУЛЬТИПЛЕКСНЫЕ ИНДИКАТОРЫ 23.4.1. МНОГОРАЗРЯДНЫЕ 7-СЕГМЕНТНЫЕ ИНДИКАТОРЫ 23.4.2. МАТРИЦА ТОЧЕК 24.  Цифро-аналоговые и аналого-цифровые преобразователи Цифро-аналоговые и аналого-цифровые преобразователи24.1. СХЕМОТЕХНИЧЕСКИЕ ПРИНЦИПЫ ЦА-ПРЕОБРАЗОВАТЕЛЕЙ 24.1.2. ЦА-ПРЕОБРАЗОВАТЕЛЬ С ПЕРЕКИДНЫМИ КЛЮЧАМИ 24.1.3. РЕЗИСТИВНАЯ МАТРИЦА ПОСТОЯННОГО ИМПЕДАНСА (МАТРИЦА ТИПА R-2R) 24.1.4. РЕЗИСТИВНАЯ МАТРИЦА ДЛЯ ДЕКАДНЫХ ПРЕОБРАЗОВАТЕЛЕЙ 24.2. ПОСТРОЕНИЕ ЦА-ПРЕОБРАЗОВАТЕЛЕЙ С ЭЛЕКТРОННЫМИ КЛЮЧАМИ 24.2.2. ЦА-ПРЕОБРАЗОВАТЕЛЬ С ТОКОВЫМИ КЛЮЧАМИ 24.3. ЦА-ПРЕОБРАЮВАТЕЛИ ДЛЯ СПЕЦИАЛЬНЫХ ПРИМЕНЕНИЙ 24.3.2. ЦА-ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕЛЕНИЯ 24.3.3. ЦА-ПРЕОБРАЗОВАТЕЛЬ КАК ГЕНЕРАТОР ФУНКЦИЙ 24.4. ОСНОВНЫЕ ПРИНЦИПЫ АЦ-ПРЕОБРАЗОВАНИЯ 24.5. ТОЧНОСТЬ АЦ-ПРЕОБРАЗОВАТЕЛЕЙ 24.6. ПОСТРОЕНИЕ АЦ-ПРЕОБРАЗОВАТЕЛЕЙ 25. Измерительные схемы 25.1. ИЗМЕРЕНИЕ НАПРЯЖЕНИЙ 25.1.2. ИЗМЕРЕНИЕ РАЗНОСТИ ПОТЕНЦИАЛОВ 25.1.3. ИЗОЛИРОВАННЫЙ УСИЛИТЕЛЬ 25.2. ИЗМЕРЕНИЕ ТОКА 25.2.1. ИЗОЛИРОВАННЫЕ ОТ ЗЕМЛИ АМПЕРМЕТРЫ С МАЛЫМ ПАДЕНИЕМ НАПРЯЖЕНИЯ 25.2.2. ИЗМЕРЕНИЕ ТОКА ПРИ ВЫСОКОМ ПОТЕНЦИАЛЕ 25.3. ИЗМЕРИТЕЛЬНЫЙ ВЫПРЯМИТЕЛЬ 25.  3.2. ИЗМЕРЕНИЕ ЭФФЕКТИВНОГО ЗНАЧЕНИЯ 3.2. ИЗМЕРЕНИЕ ЭФФЕКТИВНОГО ЗНАЧЕНИЯ25.3.3. ИЗМЕРЕНИЕ АМПЛИТУДНЫХ ЗНАЧЕНИЙ 25.3.4. СИНХРОННЫЙ ДЕТЕКТОР 26. Электронные регуляторы 26.2. ТИПЫ РЕГУЛЯТОРОВ 26.2.1. П-РЕГУЛЯТОР 26.2.2. ПИ-РЕГУЛЯТОР 26.2.3. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР 26.2.4. НАСТРАИВАЕМЫЕ ПИД-РЕГУЛЯТОРЫ 26.3. УПРАВЛЕНИЕ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ 26.4. ОТСЛЕЖИВАЮЩАЯ СИНХРОНИЗАЦИЯ (АВТОПОДСТРОЙКА) 26.4.1. ЭЛЕМЕНТЫ ВЫБОРКИ-ХРАНЕНИЯ В КАЧЕСТВЕ ФАЗОВОГО ДЕТЕКТОРА 26.4.2. СИНХРОННЫЙ ВЫПРЯМИТЕЛЬ В КАЧЕСТВЕ ФАЗОВОГО ДЕТЕКТОРА 26.4.3. ЧАСТОТНО-ЧУВСТВИТЕЛЬНЫЙ ФАЗОВЫЙ ДЕТЕКТОР 26.4.4. ФАЗОВЫЙ ДЕТЕКТОР С ПРОИЗВОЛЬНО УВЕЛИЧИВАЕМЫМ ДИАПАЗОНОМ ИЗМЕРЕНИЙ 26.4.5. ФАЗОРЕГУЛЯТОР В КАЧЕСТВЕ ПЕРЕМНОЖИТЕЛЯ ЧАСТОТ |
8.4: Импульсные регуляторы — технические библиотеки LibreTexts
-
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 3596
- Джеймс М.
 Фиоре
Фиоре - Муниципальный колледж Mohawk Valley
Основной причиной неэффективности линейного регулятора является то, что его проходной транзистор работает в линейной области. Это означает, что он постоянно видит как большой ток, так и высокое (или хотя бы умеренное) напряжение. Результатом является значительное рассеивание мощности. Напротив, импульсные регуляторы полагаются на эффективность транзисторного ключа. Когда транзистор закрыт, ток не течет и, следовательно, мощность не рассеивается. Когда транзистор включен (в насыщении), протекает большой ток, но напряжение на транзисторе (\(V_{ce(sat)}\)) очень мало. Это приводит к умеренному рассеиванию мощности. Единственное время, когда и ток, и напряжение относительно велики одновременно, — это интервал переключения. Этот период времени относительно короток по сравнению с временем цикла, поэтому, опять же, рассеиваемая мощность довольно мала.
Включение и выключение проходного транзистора может быть очень эффективным, но, к сожалению, результирующие импульсы тока не подходят для большинства нагрузок. Необходим какой-то способ сглаживания импульсов до постоянного уровня. Один из способов сделать это — использовать схему индуктор/конденсатор. Эта концепция важна для импульсного регулятора.
Необходим какой-то способ сглаживания импульсов до постоянного уровня. Один из способов сделать это — использовать схему индуктор/конденсатор. Эта концепция важна для импульсного регулятора.
Хотя импульсный регулятор обеспечивает повышенную эффективность по сравнению с линейным регулятором, он не лишен недостатков. Во-первых, импульсные регуляторы имеют тенденцию быть более сложными, чем линейные регуляторы. Эта сложность может превысить преимущество в эффективности, особенно для маломощных конструкций. Некоторые из новых «одночиповых» импульсных регуляторов делают конструкцию импульсного источника питания почти такой же простой, как и линейную, поэтому эта проблема не так серьезна, как раньше. Другая серьезная проблема заключается в том, что процесс переключения может создавать сильный излучаемый электрический шум. Без надлежащего экранирования и подобных мер предосторожности наведенные шумовые сигналы могут создавать серьезные помехи в близлежащих аналоговых или цифровых цепях. Несмотря на эти препятствия, импульсные источники питания нашли широкое применение в различных областях, включая питание персональных компьютеров.
Несмотря на эти препятствия, импульсные источники питания нашли широкое применение в различных областях, включая питание персональных компьютеров.
Рисунок \(\PageIndex{1}\): Базовый импульсный стабилизатор.
На рисунке \(\PageIndex{1}\) показана базовая схема импульсного регулятора. Еще раз, устройство управления используется для регулировки входящего сигнала. В отличие от линейного регулятора сигнал с управляющего элемента представляет собой серию импульсов. Чтобы получить плавный выход постоянного тока, последовательность импульсов проходит через цепь конденсатор/индуктор. Сердцем схемы является широтно-импульсный модулятор. Эта схема создает импульсный сигнал с переменной скважностью, который попеременно включает и выключает элемент управления. Рабочий цикл импульса пропорционален требуемому току нагрузки. Низкие импедансы нагрузки требуют больших токов и, таким образом, будут создавать последовательности импульсов с длительным временем включения. Пиковое значение импульсов будет иметь тенденцию быть намного больше, чем среднее потребление тока нагрузки, однако, если этот импульс тока усреднить за один цикл, результат будет равен требованию тока нагрузки. По сути, сеть \(LC\) служит для интегрирования импульсов тока. Это показано графически на рисунке \(\PageIndex{2}\). Поскольку более низкий импеданс нагрузки получает пропорционально больший ток, напряжение нагрузки остается постоянным. Это показано графически на рисунке \(\PageIndex{3}\).
По сути, сеть \(LC\) служит для интегрирования импульсов тока. Это показано графически на рисунке \(\PageIndex{2}\). Поскольку более низкий импеданс нагрузки получает пропорционально больший ток, напряжение нагрузки остается постоянным. Это показано графически на рисунке \(\PageIndex{3}\).
Рисунок \(\PageIndex{2}\): Текущие кривые.
Рисунок \(\PageIndex{3}\): кривые напряжения.
Из-за постоянной зарядки и разрядки компонентов \(L\) и \(C\) импульсные стабилизаторы реагируют на изменение нагрузки несколько медленнее, чем линейные стабилизаторы. Кроме того, если частота импульса переключения высока, требуемые размеры для \(L\) и \(C\) могут быть уменьшены, что приведет к уменьшению размера схемы и возможному снижению стоимости. Многие импульсные регуляторы работают в диапазоне от 20 кГц до 100 кГц. Практический верхний предел скорости переключения определяется скоростью элемента управления. Устройства с быстрым временем переключения окажутся более эффективными. Мощные полевые транзисторы очень привлекательны для этого приложения из-за присущей им скорости и низких требований к приводу. Их отрицательный температурный коэффициент крутизны также помогает уменьшить проблемы с тепловым разгоном. Для самых высоких мощностей биполярные устройства часто являются единственным выбором. Наконец, многие переключатели можно настроить на понижение, повышение или работу инвертора. В качестве примера мы рассмотрим конфигурацию понижения или понижения.
Мощные полевые транзисторы очень привлекательны для этого приложения из-за присущей им скорости и низких требований к приводу. Их отрицательный температурный коэффициент крутизны также помогает уменьшить проблемы с тепловым разгоном. Для самых высоких мощностей биполярные устройства часто являются единственным выбором. Наконец, многие переключатели можно настроить на понижение, повышение или работу инвертора. В качестве примера мы рассмотрим конфигурацию понижения или понижения.
Рисунок \(\PageIndex{4a}\): Базовый импульсный понижающий регулятор. а. \(Q\) on: Источник подает ток и заряжает катушку индуктивности.
Блок-схема понижающего импульсного регулятора показана на рисунке \(\PageIndex{4}\). Вот как это работает: когда транзистор \(Q\) открыт, ток протекает через \(Q\), \(L\) и нагрузку. Ток индуктора возрастает со скоростью, равной напряжению индуктора, деленному на индуктивность. Напряжение дросселя равно входному напряжению минус напряжение нагрузки и потенциал насыщения транзистора. Пока \(L\) заряжается (т. е. \(I_L < I_{нагрузка}\)), \(C\) обеспечивает ток нагрузки. Когда \(Q\) выключается, магнитное поле индуктора начинает коллапсировать, вызывая эффективную смену полярности. Другими словами, катушка индуктивности теперь действует как источник тока нагрузки. В этот момент диод \(D\) смещен в прямом направлении, эффективно удаляя левую часть схемы. \(L\) также подает ток на конденсатор \(C\) в течение этого периода времени. В конце концов, ток индуктора упадет ниже значения, требуемого нагрузкой, и \(C\) начнет разряжаться, компенсируя разницу. Прежде чем \(L\) полностью разрядится, транзисторный ключ снова включится, повторяя цикл. Поскольку индуктор никогда не разряжается полностью, это называется непрерывным режимом работы. Возможна также прерывистая работа, хотя мы не будем ее здесь рассматривать. Стоит отметить, что для правильного продолжения этого цикла всегда должно присутствовать некоторое потребление тока нагрузки. Этот минимальный уровень может быть достигнут за счет использования стабилизирующего резистора параллельно нагрузке.
Пока \(L\) заряжается (т. е. \(I_L < I_{нагрузка}\)), \(C\) обеспечивает ток нагрузки. Когда \(Q\) выключается, магнитное поле индуктора начинает коллапсировать, вызывая эффективную смену полярности. Другими словами, катушка индуктивности теперь действует как источник тока нагрузки. В этот момент диод \(D\) смещен в прямом направлении, эффективно удаляя левую часть схемы. \(L\) также подает ток на конденсатор \(C\) в течение этого периода времени. В конце концов, ток индуктора упадет ниже значения, требуемого нагрузкой, и \(C\) начнет разряжаться, компенсируя разницу. Прежде чем \(L\) полностью разрядится, транзисторный ключ снова включится, повторяя цикл. Поскольку индуктор никогда не разряжается полностью, это называется непрерывным режимом работы. Возможна также прерывистая работа, хотя мы не будем ее здесь рассматривать. Стоит отметить, что для правильного продолжения этого цикла всегда должно присутствовать некоторое потребление тока нагрузки. Этот минимальный уровень может быть достигнут за счет использования стабилизирующего резистора параллельно нагрузке.
Рисунок \(\PageIndex{4b}\): Базовый импульсный понижающий регулятор (продолжение). б. \(Q\) выкл.: Индуктор подает ток
Значения \(C\) и \(L\) зависят от входного и выходного напряжения, требуемого выходного тока, частоты переключения и особенностей используемой схемы переключения. Производители обычно предоставляют справочные таблицы и диаграммы для соответствующих значений и/или формул. Более ранние переключающие ИС содержали необходимые базовые компоненты и требовали лишь умеренного количества внешних схем. Новейшие ИС могут иметь не более трех-четырех внешних пассивных частей.
Одним из примеров импульсного стабилизатора является LM3578A. Функциональная схема внутренней работы этой ИС показана на рисунке \(\PageIndex{5}\). Логические элементы И, компаратор, осциллятор и связанные с ними защелки вместе образуют широтно-импульсный модулятор. Обратите внимание, что эта схема включает внутренний источник опорного напряжения и переключающий транзистор средней мощности. Доступны тепловое отключение и ограничение тока. Схема будет работать при входном напряжении до 40 В и может создавать выходные токи до 750 мА. Максимальная частота переключения составляет 100 кГц. С этим устройством возможны конфигурации повышения, понижения и инвертора. Чтобы сделать последовательность проектирования максимально быстрой, производитель включил схему проектирования. Это показано на рисунке \(\PageIndex{6}\). Как и практически во всех узкоспециализированных ИС, конкретные расчетные уравнения применимы только к конкретным устройствам и, вероятно, не могут использоваться с ИС, выполняющими аналогичные функции. Следовательно, рекомендуется не запоминать эти формулы!
Доступны тепловое отключение и ограничение тока. Схема будет работать при входном напряжении до 40 В и может создавать выходные токи до 750 мА. Максимальная частота переключения составляет 100 кГц. С этим устройством возможны конфигурации повышения, понижения и инвертора. Чтобы сделать последовательность проектирования максимально быстрой, производитель включил схему проектирования. Это показано на рисунке \(\PageIndex{6}\). Как и практически во всех узкоспециализированных ИС, конкретные расчетные уравнения применимы только к конкретным устройствам и, вероятно, не могут использоваться с ИС, выполняющими аналогичные функции. Следовательно, рекомендуется не запоминать эти формулы!
Рисунок \(\PageIndex{5}\): Эквивалентная схема LM3578. Перепечатано с разрешения Texas Instruments
.
Рисунок \(\PageIndex{6}\): схема проектирования LM3578. Перепечатано с разрешения Texas Instruments
. Понижающий регулятор, использующий LM3578A, показан на рисунке \(\PageIndex{7}\). \(C_1\) — это конденсатор выбора частоты, его можно найти в таблице производителя. \(C_3\) необходим для непрерывной работы и обычно составляет от 10 до 30 пФ. \(D_1\) должен быть выпрямителем типа Шоттки. \(R_1\) и \(R_2\) задают коэффициент понижения (функционально они аналогичны \(R_f\) и \(R_i\) в предыдущей работе). \(R_3\) устанавливает текущее ограничение. Наконец, \(L_1\) и \(C_2\) используются для окончательной фильтрации вывода. 92 V_{in} V_{пульсация} L_1} \номер\]
\(C_1\) — это конденсатор выбора частоты, его можно найти в таблице производителя. \(C_3\) необходим для непрерывной работы и обычно составляет от 10 до 30 пФ. \(D_1\) должен быть выпрямителем типа Шоттки. \(R_1\) и \(R_2\) задают коэффициент понижения (функционально они аналогичны \(R_f\) и \(R_i\) в предыдущей работе). \(R_3\) устанавливает текущее ограничение. Наконец, \(L_1\) и \(C_2\) используются для окончательной фильтрации вывода. 92 V_{in} V_{пульсация} L_1} \номер\]
\[ L_1 = V_{выход} \frac{V_{вход} — V_{выход}}{\Delta I_{выход} V_{вход} f} \nonumber \]
\[ \Delta I_{out} = 2 I_{out} \ Discontinuity \ Factor \text{ (обычно 0,2)} \nonumber \]
Где \(I_{sw(max)}\) — максимальный ток через переключающий элемент, а \(V_{ripple}\) — в вольтах от пика к пику. Некоторые значения можно найти с помощью метода справочной диаграммы, показанного на рисунке \(\PageIndex{6}\).
Пример \(\PageIndex{1}\)
Используя LM3578A, спроектируйте понижающий стабилизатор, который выдает 12 В от источника 20 В с током нагрузки 200 мА. Используйте частоту генератора 50 кГц и коэффициент дискретности 0,2 (20%). Пульсации должны быть не более 40 мВ.
Используйте частоту генератора 50 кГц и коэффициент дискретности 0,2 (20%). Пульсации должны быть не более 40 мВ.
Сначала определите значения \(R_1\) и \(R_2\). \(R_2\) произвольно выбирается на уровне 10 k\(\Omega\).
\[ V_{out} = \frac{R_1}{R_2} +1 \text{ (в вольтах)} \nonumber \]
\[ R_1 = R_2 (V_{out} − 1V) \nonumber \]
\[ R_1 = 10k (12 В-1 В) \номер \]
\[ R_1 = 110 k \nonumber \]
\[ R_3 = \frac{0.11V}{I_{sw(max)}} \nonumber \]
\[ R_3 = \frac{0.11 V}{ 0,75 А} \нечисло \]
\[ R_3 = 0,15 \Омега \нечисло \]
Обратите внимание, что \(R_3\) всегда будет 0,15 \(\Омега\) для этой формы схемы
Из графика осциллятора, \(C_1\) оценивается в 1700 пФ, а \(C_3\) устанавливается в 20 пФ, как предлагает производитель.
\[ \Delta I_{out} = 2 I_{out} \ Разрыв \ Фактор \nonnumber \] 92 \times 20 V\times 40 mV\times 1.2 mH} \nonumber \]
\[ C_2 \geq 5 \mu F \nonumber \]
Чтобы быть на консервативной стороне, обычно устанавливается \(C_2\) немного выше, поэтому можно использовать стандартные 33 \(\mu\)F или 47 \(\mu\)F.
Базовый инвертирующий коммутатор показан на рисунке \(\PageIndex{8}\). Эта схема создает отрицательный выходной потенциал из положительного входа. Это работает следующим образом: когда транзисторный ключ закрыт, катушка индуктивности L заряжается. Диод \(D\) находится в обратном смещении, так как его анод отрицательный. Когда переключатель размыкается, коллапсирующее поле индуктора заставляет его выглядеть как источник противоположной полярности. Диод смещен в прямом направлении, потому что его катод теперь вынужден быть ниже, чем его анод. Катушка индуктивности теперь может подавать ток на нагрузку. В конце концов, катушка индуктивности разрядится до такой степени, что транзисторный ключ снова включится. Пока катушка индуктивности заряжается, конденсатор \(C\) обеспечивает ток нагрузки. Процесс повторяется, таким образом поддерживая постоянный выходной потенциал.
Рисунок \(\PageIndex{8}\): Базовый инвертирующий коммутатор. а. \(Q\) горит: индуктор заряжается от источника (вверху).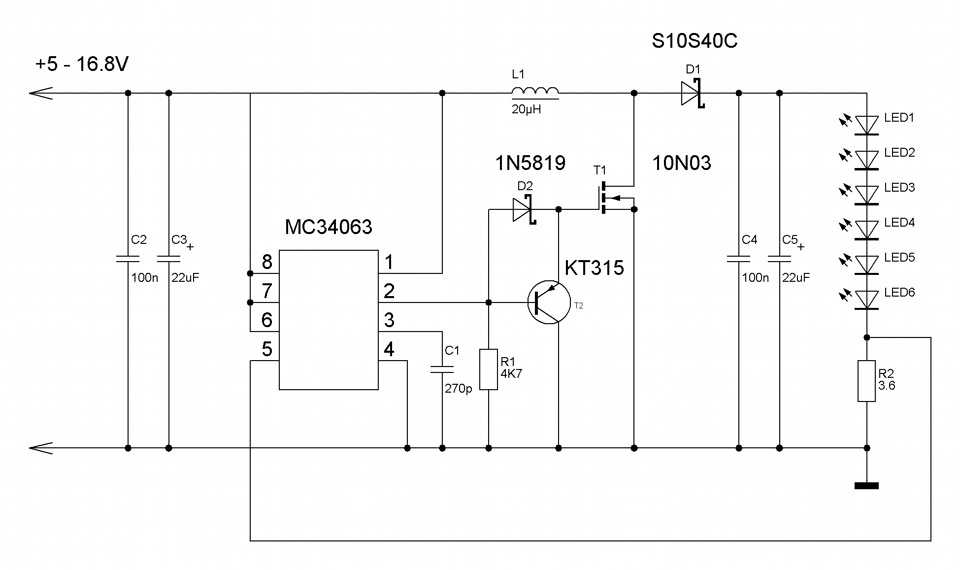 б. \(Q\) выкл.: Индуктор подает ток (внизу).
б. \(Q\) выкл.: Индуктор подает ток (внизу).
На рисунке \(\PageIndex{9}\) показан простой переключатель на повышение. Этот вариант используется, когда требуется потенциал, превышающий входной, например, получение питания 15 В от существующего источника 5 В. Вот как работает схема: когда транзисторный ключ закрыт, катушка индуктивности \(L\) заряжается. В течение этого периода конденсатор \(C\) подает ток нагрузки. Поскольку выходной потенциал будет намного выше, чем напряжение насыщения транзисторного ключа, диод \(D\) будет находиться в обратном смещении. Когда транзистор закрывается, магнитное поле катушки индуктивности разрушается, в результате чего катушка индуктивности выглядит как источник. Этот потенциал добавляется к потенциалу источника возбуждения, так как эти два элемента соединены последовательно. Это комбинированное напряжение и есть то, что видит нагрузка; следовательно, напряжение на нагрузке больше, чем на источнике возбуждения. В конце концов, катушка индуктивности разряжается до точки, в которой транзистор снова включается, тем самым смещая диод в обратном направлении и перезаряжая \(L\). Конденсатор будет продолжать подавать ток нагрузки в течение этого времени. Этот процесс будет продолжаться таким же образом, создавая желаемое выходное напряжение.
Конденсатор будет продолжать подавать ток нагрузки в течение этого времени. Этот процесс будет продолжаться таким же образом, создавая желаемое выходное напряжение.
Рисунок \(\PageIndex{9a}\): Базовый повышающий импульсный стабилизатор. \(Q\) on: Источник заряжает индуктор.
Рисунок \(\PageIndex{9b}\): Базовый повышающий импульсный регулятор. \(Q\) выкл.: Индуктор подает ток.
Для форм повышения и инвертора для LM3578A используются другие наборы уравнений. Хотя последовательность проектирования, безусловно, не так проста, как в схемах линейного регулятора, она также не является серьезной задачей. Если 750 мА недостаточно, к LM3578A можно добавить внешний проходной транзистор. Другие ИС импульсных регуляторов доступны от разных производителей. Каждый блок работает по одному и тому же основному принципу, но реализация проекта может идти по совершенно разным путям. Для каждой модели необходимо сверяться со спецификациями конкретных устройств.
Для конкретных приложений некоторые производители предлагают импульсные регуляторы, которые почти полностью заменяют базовые 3-контактные линейные регуляторы. Однако эти устройства далеко не так гибки, как универсальные микросхемы импульсных стабилизаторов. Хорошим примером является регулятор LM2576. Это 3-амперный понижающий регулятор на выходе (т. е. только в понижающем режиме). Он доступен с различными выходными напряжениями в диапазоне от 3,3 В до 15 В. Также доступна регулируемая версия. Блок-схема и типовая схема показаны на рисунке \(\PageIndex{10}\). Как видите, типичная конструкция с фиксированным выходом требует минимум внешних компонентов: 2 конденсатора, катушка индуктивности и диод. Другие члены этого семейства включают понижающий регулятор LM2574 на 0,5 А и повышающий регулятор LM2577.
Рисунок \(\PageIndex{10}\): Импульсный регулятор LM2576. Перепечатано с разрешения Texas Instruments
. Эта страница под названием 8. 4: Switching Regulators распространяется под лицензией CC BY-NC-SA 4.0 и была создана, изменена и/или курирована Джеймсом М. Фиоре через исходный контент, отредактированный в соответствии со стилем и стандартами LibreTexts. Платформа; подробная история редактирования доступна по запросу.
4: Switching Regulators распространяется под лицензией CC BY-NC-SA 4.0 и была создана, изменена и/или курирована Джеймсом М. Фиоре через исходный контент, отредактированный в соответствии со стилем и стандартами LibreTexts. Платформа; подробная история редактирования доступна по запросу.
- Наверх
-
- Была ли эта статья полезной?
-
- Тип изделия
- Раздел или Страница
- Автор
- Джеймс М. Фиоре
- Лицензия
- CC BY-NC-SA
- Версия лицензии
- 4,0
- Показать оглавление
- нет
-
- Теги
-
- source@http://www.
 dissidents.com/resources/OperationalAmplifiersAndLinearICs_3E.pdf
dissidents.com/resources/OperationalAmplifiersAndLinearICs_3E.pdf
- source@http://www.
Основы схемотехники и эффективность
В электронике регулятор — это устройство или механизм, который может постоянно регулировать выходную мощность. Существуют различные виды регуляторов, доступных в области электропитания. Но в основном в случае Преобразование постоянного тока в постоянный , доступны два типа регуляторов: Линейный или Переключающий .
Линейный регулятор регулирует выход с помощью резистивного падения напряжения, из-за чего линейные регуляторы имеют более низкий КПД и теряют мощность в виде тепла.
С другой стороны Импульсный регулятор использует индуктор, диод и выключатель питания для передачи энергии от источника к выходу.
Доступны три типа импульсных регуляторов.
1. Step-up converter (Boost Regulator)
2. Step-Down converter (Buck regulator)
Step-Down converter (Buck regulator)
3. Inverter (Flyback)
In this учебник мы описываем схему переключения повышающего регулятора . Мы уже описали конструкцию повышающего регулятора в предыдущем уроке. Здесь мы обсудим различные аспекты преобразователя Boost и , как повысить его эффективность .
Основы проектирования схемы повышающего преобразователя
Во многих случаях нам необходимо преобразовать более низкое напряжение в более высокое в зависимости от требований. Повышающий регулятор повышает напряжение от более низкого потенциала до более высокого потенциала.
На изображении выше показана простая схема повышающего регулятора , в которой используются индуктор, диод, конденсатор и переключатель.
Катушка индуктивности предназначена для ограничения скорости нарастания тока, протекающего через выключатель питания. Это ограничит избыточный высокий пиковый ток, который неизбежен при индивидуальном сопротивлении переключателя.
Это ограничит избыточный высокий пиковый ток, который неизбежен при индивидуальном сопротивлении переключателя.
Кроме того, индуктор хранит энергию, энергия измеряется в джоулях E = (L * I 2 / 2)
Мы поймем, как индукторы передают энергию, на следующих изображениях и графиках.
В случае импульсных регуляторов повышения давления есть две фазы, одна из которых — фаза заряда индуктора или фаза включения (переключатель фактически замкнут), а другая — Фаза разряда или фаза выключения (переключатель открыт).
Если предположить, что переключатель долгое время находился в разомкнутом положении , то падение напряжения на диоде отрицательно, а напряжение на конденсаторе равно входному напряжению. В этой ситуации, если переключатель вплотную подходит к Вин пугается через дроссель. Диод предотвращает разрядку конденсатора через переключатель на землю.
Ток через катушку индуктивности увеличивается линейно со временем. Скорость нарастания линейного тока пропорциональна входному напряжению, деленному на индуктивность di / dt = Напряжение на индукторе / индуктивность
На верхнем графике показана фаза зарядки индуктора. Ось x обозначает t (время), а ось Y обозначает I (ток через индуктор). Ток увеличивается линейно со временем, когда переключатель замкнут или включен.
Теперь, , когда переключатель снова срабатывает или становится разомкнутым, ток катушки индуктивности протекает через диод и заряжает выходной конденсатор. Когда выходное напряжение возрастает, наклон тока через катушку индуктивности меняется на противоположный. Выходное напряжение возрастает до Напряжение через дроссель = L * (di / dt ) достигнуто.
Скорость падения тока катушки индуктивности со временем прямо пропорциональна напряжению катушки индуктивности. Чем выше напряжение индуктора, тем быстрее падает ток через индуктор.
Чем выше напряжение индуктора, тем быстрее падает ток через индуктор.
На приведенном выше графике ток дросселя падает со временем, когда переключатель отключается .
Когда импульсный регулятор находится в установившемся режиме работы, среднее напряжение дросселя равно нулю в течение всего цикла переключения. Для этого условия средний ток через индуктор также находится в установившемся режиме.
Если предположить, что время заряда катушки индуктивности равно Ton, а схема имеет входное напряжение, то для выходного напряжения будет определенное время Toff или время разряда.
Поскольку среднее напряжение индуктора равно нулю в установившемся режиме, мы можем построить повышающую схему, используя следующие термины
Вин Х Тон = Тофф х ВЛ VL = Vin x (Ton / Toff)
Поскольку выходное напряжение равно входному напряжению и среднему напряжению индуктора (Vout = Vin + VL)
Можно сказать, что
Vout = Vin + Vin x (Ton/Toff) Vout = Vin x (1 + Ton / Toff)
Мы также можем рассчитать Vout, используя рабочий цикл.
Рабочий цикл (D) = тонна / (тонна + Toff)
Для повышающего импульсного стабилизатора Vout будет Vin / (1 – D)
ШИМ и рабочий цикл для цепи повышающего преобразователя
выход повышающего преобразователя. Таким образом, для изменения рабочего цикла мы используем схему управления на переключателе.
Таким образом, для полной базовой схемы повышающего регулятора нам нужна дополнительная схема, которая будет изменять рабочий цикл и, следовательно, количество времени, в течение которого индуктор получает энергию от источника.
На изображении выше виден усилитель ошибки , который измеряет выходное напряжение на нагрузке с помощью пути обратной связи и управляет переключателем. Наиболее распространенная технология управления включает в себя технику ШИМ или широтно-импульсной модуляции, которая используется для управления рабочим циклом схемы.
Цепь управления управляет временем, в течение которого переключатель остается разомкнутым или замкнутым, в зависимости от тока, потребляемого нагрузкой. Эта схема также используется для непрерывной работы в установившемся режиме. Он возьмет образец выходного напряжения и вычитает его из опорного напряжения и создаст небольшой сигнал ошибки, затем этот сигнал ошибки будет сравниваться с линейным сигналом генератора, а с выхода компаратора ШИМ-сигнал будет управлять переключателем. схема.
Когда выходное напряжение изменяется, это также влияет на напряжение ошибки. Из-за изменения напряжения ошибки компаратор управляет выходом ШИМ. ШИМ также изменился в положение, когда выходное напряжение создает нулевое напряжение ошибки, и, делая это, система с замкнутым контуром управления выполняет работу.
К счастью, в большинстве современных импульсных регуляторов повышения давления эта штука встроена в корпус микросхемы. Таким образом достигается простота схемотехники с использованием современных импульсных стабилизаторов.
Опорное напряжение обратной связи создается с помощью цепи резисторного делителя. Это дополнительная схема, которая необходима вместе с катушкой индуктивности, диодами и конденсаторами.
Повышение эффективности схемы повышающего преобразователя
Теперь, если мы исследуем эффективность, это то, сколько энергии мы обеспечиваем внутри схемы и сколько мы получаем на выходе.
(Pout / Pin) * 100%
Поскольку энергию нельзя ни создать, ни уничтожить, ее можно только преобразовать, большинство электрических энергий теряет неиспользуемые мощности, преобразуемые в тепло. Кроме того, на практике не бывает идеальной ситуации, эффективность является более важным фактором при выборе регуляторов напряжения.
Одним из основных факторов потерь мощности импульсного стабилизатора является диод. Падение прямого напряжения, умноженное на ток (Vf x i), представляет собой неиспользованную мощность, которая преобразуется в тепло и снижает эффективность схемы импульсного стабилизатора. Кроме того, это дополнительные затраты на схемы для методов управления температурой / теплом с использованием радиатора или вентиляторов для охлаждения схемы от рассеиваемого тепла. Не только прямое падение напряжения, но и обратное восстановление для кремниевых диодов также приводят к ненужным потерям мощности и снижению общего КПД.
Кроме того, это дополнительные затраты на схемы для методов управления температурой / теплом с использованием радиатора или вентиляторов для охлаждения схемы от рассеиваемого тепла. Не только прямое падение напряжения, но и обратное восстановление для кремниевых диодов также приводят к ненужным потерям мощности и снижению общего КПД.
Одним из лучших способов избежать стандартного восстанавливающего диода является использование диодов Шоттки вместо диодов, которые имеют низкое прямое падение напряжения и лучшее обратное восстановление. Когда требуется максимальная эффективность, диод можно заменить на полевые МОП-транзисторы. В современных технологиях существует множество вариантов, доступных в разделе «Переключение наддувочного регулятора», которые легко обеспечивают эффективность более 90% .
Также имеется функция «Режим пропуска», которая используется во многих современных устройствах, что позволяет регулятору пропускать циклы переключения, когда нет необходимости в переключении при очень малых нагрузках. Это отличный способ повысить эффективность в условиях легкой нагрузки. В режиме пропуска цикл переключения запускается только тогда, когда выходное напряжение падает ниже порога регулирования.
Это отличный способ повысить эффективность в условиях легкой нагрузки. В режиме пропуска цикл переключения запускается только тогда, когда выходное напряжение падает ниже порога регулирования.
Несмотря на более высокий КПД, стационарную технику конструкции, меньший размер компонентов, импульсные регуляторы шумнее, чем линейные регуляторы. Тем не менее, они широко популярны.
Пример конструкции повышающего преобразователя
Ранее мы создали схему повышающего регулятора с использованием MC34063, в которой выходное напряжение 5 В генерируется из входного напряжения 3,7 В. MC34063 — импульсный регулятор, который использовался в конфигурации повышающего регулятора. Мы использовали индуктор, диод Шоттки и конденсаторы.
На изображении выше Cout — это выходной конденсатор, также мы использовали катушку индуктивности и диод Шоттки, которые являются основными компонентами импульсного стабилизатора. Также используется сеть обратной связи.