Как сделать металлоискатель своими руками. Какие бывают типы металлоискателей. Как работают металлоискатели. Пошаговая инструкция по сборке простого металлоискателя. Какие компоненты нужны для создания металлоискателя.
Принцип работы металлоискателя
Металлоискатель — это электронный прибор, предназначенный для обнаружения металлических предметов в различных средах. Принцип его работы основан на электромагнитной индукции.
Основные компоненты металлоискателя:
- Генератор переменного тока
- Передающая катушка
- Приемная катушка
- Электронный блок обработки сигнала
- Индикатор (звуковой и/или визуальный)
Как работает металлоискатель.
- Генератор вырабатывает переменный ток
- Ток подается на передающую катушку, которая создает переменное магнитное поле
- При наличии металлического предмета в зоне действия поля в нем возникают вихревые токи
- Вихревые токи создают собственное магнитное поле
- Это поле наводит ЭДС в приемной катушке
- Сигнал с приемной катушки обрабатывается электронным блоком
- При обнаружении металла срабатывает индикатор
Основные типы металлоискателей
Существует несколько основных типов металлоискателей, различающихся по принципу действия:

1. Индукционно-балансные металлоискатели
Принцип работы основан на измерении разбаланса между передающей и приемной катушками при появлении металлического предмета. Отличаются высокой чувствительностью.
2. Импульсные металлоискатели
Работают путем генерации коротких импульсов тока и анализа отраженного сигнала. Хорошо обнаруживают крупные объекты на большой глубине.
3. Металлоискатели на биениях
Используют два генератора с близкими частотами. При появлении металла частота одного генератора меняется, что фиксируется по изменению звука биений.
4. Металлоискатели с передачей частоты
Принцип основан на изменении частоты колебательного контура при внесении в его поле металлического предмета.
Схема простого металлоискателя на биениях
Рассмотрим схему простейшего металлоискателя на биениях, который можно собрать своими руками:
«` «`Основные компоненты схемы:
- Г1, Г2 — генераторы высокой частоты
- СМ — смеситель
- УНЧ — усилитель низкой частоты
- Д — динамик
Принцип работы данной схемы:
- Генераторы Г1 и Г2 вырабатывают сигналы с близкими частотами
- Сигналы подаются на смеситель СМ
- На выходе смесителя образуется сигнал с частотой биений
- Этот сигнал усиливается УНЧ и подается на динамик
- При обнаружении металла частота одного из генераторов меняется
- Изменение частоты биений воспринимается на слух
Пошаговая инструкция по сборке простого металлоискателя
Рассмотрим процесс сборки простого металлоискателя на биениях своими руками:
- Подготовьте необходимые компоненты:
- 2 транзистора КТ315 или аналогичных
- 2 конденсатора 100 пФ
- 2 резистора 1 кОм
- 2 катушки индуктивности
- Динамик или наушники
- Источник питания 9В
- Намотайте две одинаковые катушки по 30 витков проводом 0.3-0.5 мм на каркасе диаметром 5-7 см
- Соберите два генератора на транзисторах по схеме емкостной трехточки
- Выходы генераторов соедините через резисторы с базой второго транзистора
- Подключите динамик или наушники к коллектору второго транзистора
- Подключите источник питания
- Настройте частоты генераторов так, чтобы появился звук низкой частоты
- Закрепите одну из катушек на корпусе прибора
Как улучшить чувствительность самодельного металлоискателя
Для повышения чувствительности и стабильности работы самодельного металлоискателя можно предпринять следующие меры:
- Использовать более качественные компоненты с малым разбросом параметров
- Увеличить количество витков в катушках
- Применить экранирование для уменьшения помех
- Добавить схему автоподстройки частоты
- Использовать операционные усилители для обработки сигнала
- Заменить аналоговую схему на микроконтроллер с программной обработкой сигнала
Преимущества и недостатки самодельных металлоискателей
Рассмотрим основные плюсы и минусы создания металлоискателя своими руками:
Преимущества:
- Низкая стоимость по сравнению с готовыми приборами
- Возможность изучить принципы работы устройства
- Получение практических навыков в электронике
- Возможность модификации и улучшения конструкции
Недостатки:
- Уступают по характеристикам профессиональным приборам
- Требуют времени и усилий на изготовление
- Могут быть нестабильны в работе
- Ограниченный функционал
Области применения металлоискателей
Металлоискатели находят применение во многих сферах деятельности:
- Археология — поиск древних артефактов
- Поиск кладов и потерянных ценностей
- Обеспечение безопасности — обнаружение оружия и взрывных устройств
- Строительство — поиск скрытых коммуникаций
- Промышленность — контроль качества продукции
- Геологоразведка — поиск рудных месторождений
- Военное дело — обнаружение мин и неразорвавшихся снарядов
Правовые аспекты использования металлоискателей
При использовании металлоискателей важно учитывать правовые ограничения:
- Запрещено проводить раскопки на территории памятников истории и культуры без соответствующего разрешения
- Найденные исторические ценности подлежат обязательной передаче государству
- Нельзя использовать металлоискатели в местах проведения археологических работ
- Запрещено проводить поиск на частной территории без разрешения владельца
- В некоторых странах требуется лицензия на использование металлоискателя
Перед использованием металлоискателя рекомендуется ознакомиться с местным законодательством, чтобы избежать возможных проблем с законом.
Заключение
Создание металлоискателя своими руками — увлекательный процесс, позволяющий не только получить рабочий прибор, но и углубить знания в области электроники. Хотя самодельные устройства уступают профессиональным моделям, они вполне пригодны для любительского использования и могут стать отличным хобби.
ПРОСТОЙ САМОДЕЛЬНЫЙ МЕТАЛЛОИСКАТЕЛЬ
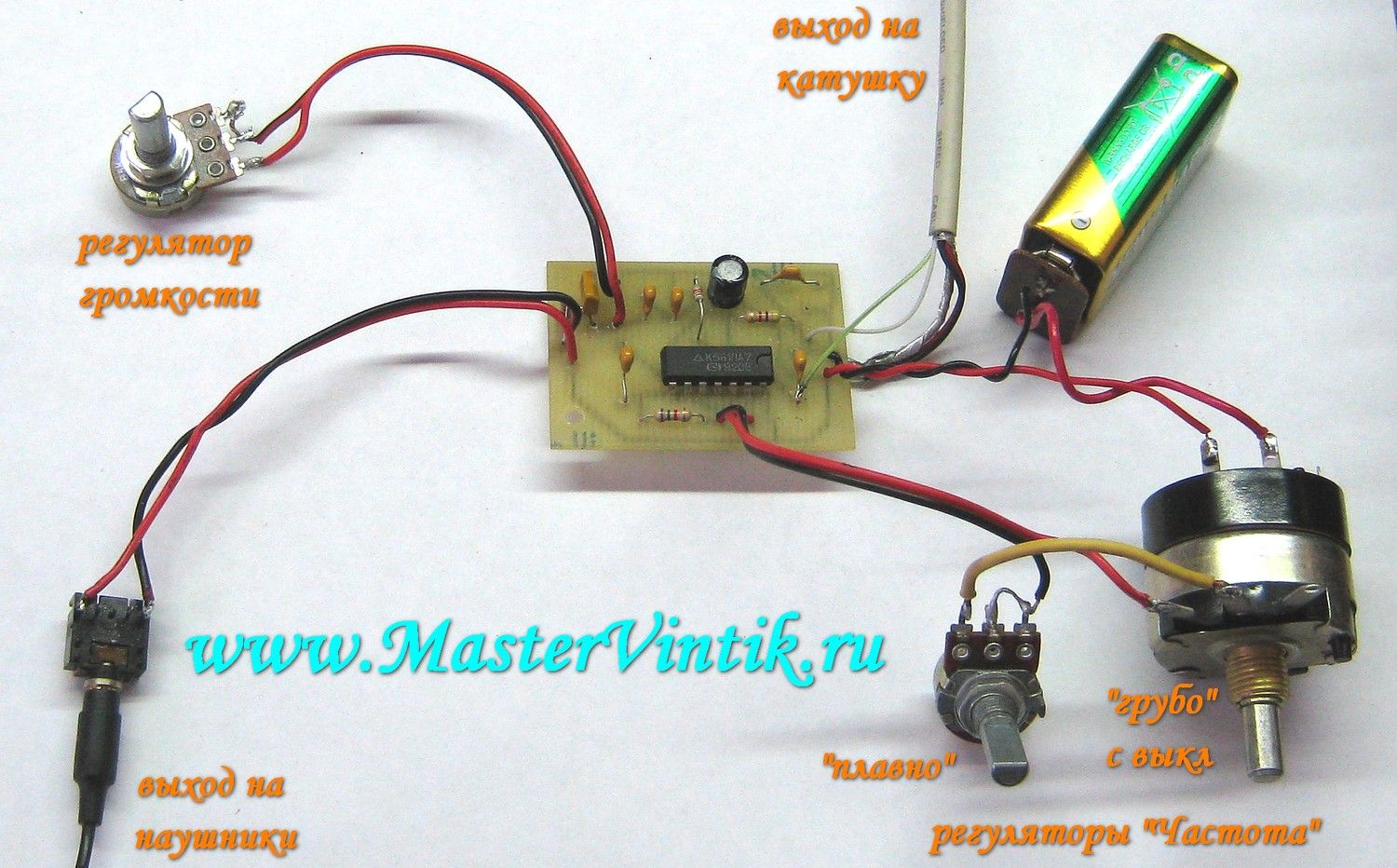
В настоящее время существует множество металлоискателей на микросхемах. Но данная схема металлодетектора не содержит никаких микросхем, а только простые недорогие детали, которые можно легко найти. Ниже смотрите схему самодельного металлоискателя: Предельное расстояние обнаружения по воздуху:5-ти копеечной монеты — 10-15 см
закаточной крышки — 30 см
Конструкция самодельного
металлоискателя
представлена на рисунке.
 В качестве питания МД использовал батарейку от телефона. Включение и выключение металлоискателя происходит с помощью разъема для наушников. Когда наушники вставлены — металлоискатель работает. Фото как подключать наушники показано на рисунке.
В качестве питания МД использовал батарейку от телефона. Включение и выключение металлоискателя происходит с помощью разъема для наушников. Когда наушники вставлены — металлоискатель работает. Фото как подключать наушники показано на рисунке.густой смазкой, чтобы вращение было плавным и не сбивалось от вибраций. Узел подстройки приклеивается рядом с катушкой. Настройка производится вдали от металлических предметов. Подсоединяем наушники — сразу пищит.
 На любую катушку сверху клеим трубочку с ферритом. Перед началом работы подключаем наушники, тем самым включаем металлоискатель. Подстраиваем частоту на грань срыва синхронизации. Желательно, чтобы в наушниках были слышны щелчки, это максимальная чувствительность. При поиске, по изменению звука в наушниках, определяем наличие металлического предмета в грунте. Удачного вам копа!
На любую катушку сверху клеим трубочку с ферритом. Перед началом работы подключаем наушники, тем самым включаем металлоискатель. Подстраиваем частоту на грань срыва синхронизации. Желательно, чтобы в наушниках были слышны щелчки, это максимальная чувствительность. При поиске, по изменению звука в наушниках, определяем наличие металлического предмета в грунте. Удачного вам копа!Форум по металлоискателям
Форум по обсуждению материала ПРОСТОЙ САМОДЕЛЬНЫЙ МЕТАЛЛОИСКАТЕЛЬ
Миноискатель
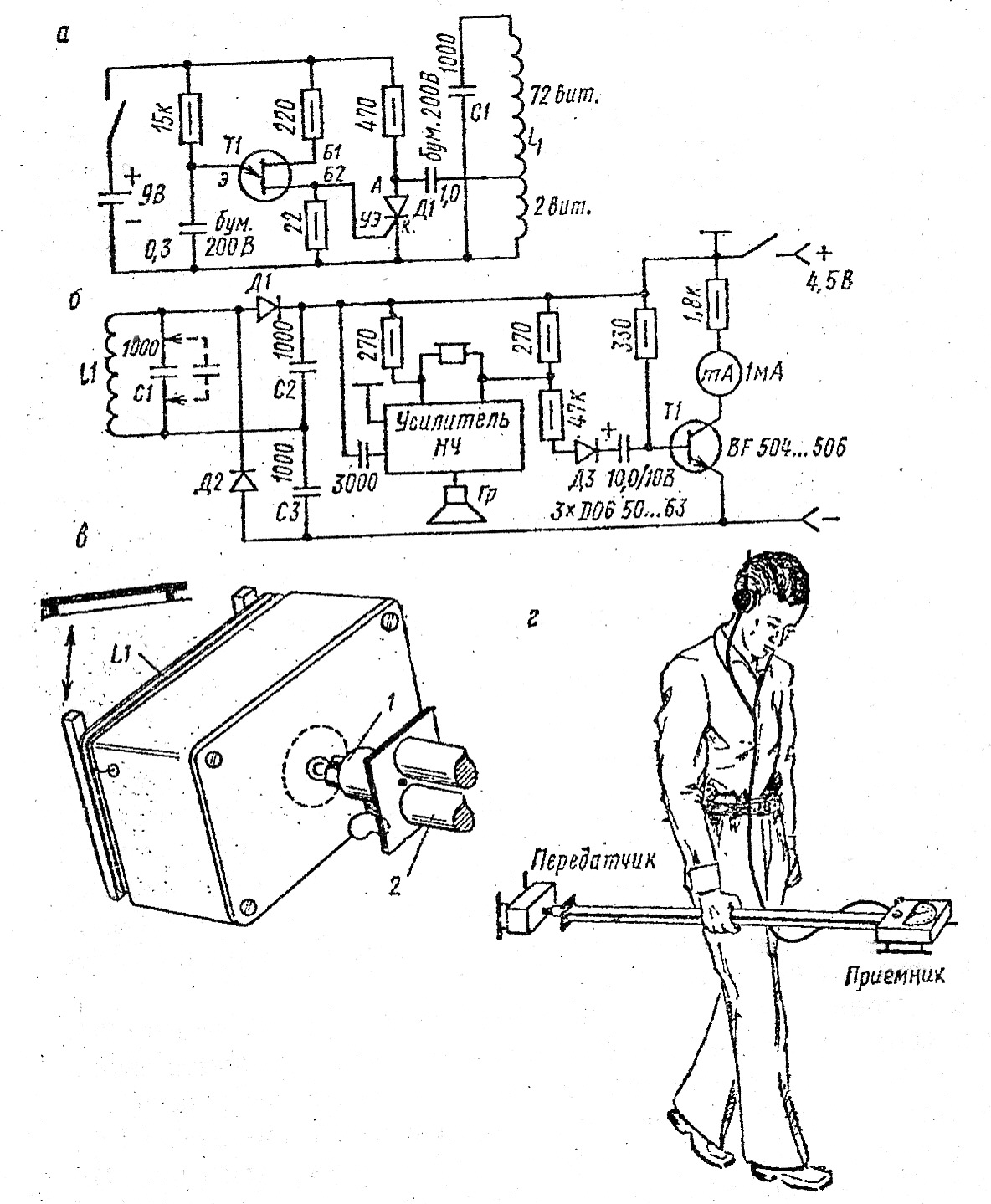
МиноискательВ наше время существует немало миноискателей, но они используются для работы преимущественно саперами. В нашем же испытании в качестве мин послужат различные металлические диски и консервные банки, зарытые на небольшую глубину в землю. Находить такие «мины» будут три устройства: миноискатель на двух транзисторах, миноискатель на трех транзисторах и миноискатель на семи транзисторах.
Принцип работы миноискателя на двух транзисторах
Данный миноискатель был разработан московским радиолюбителем В.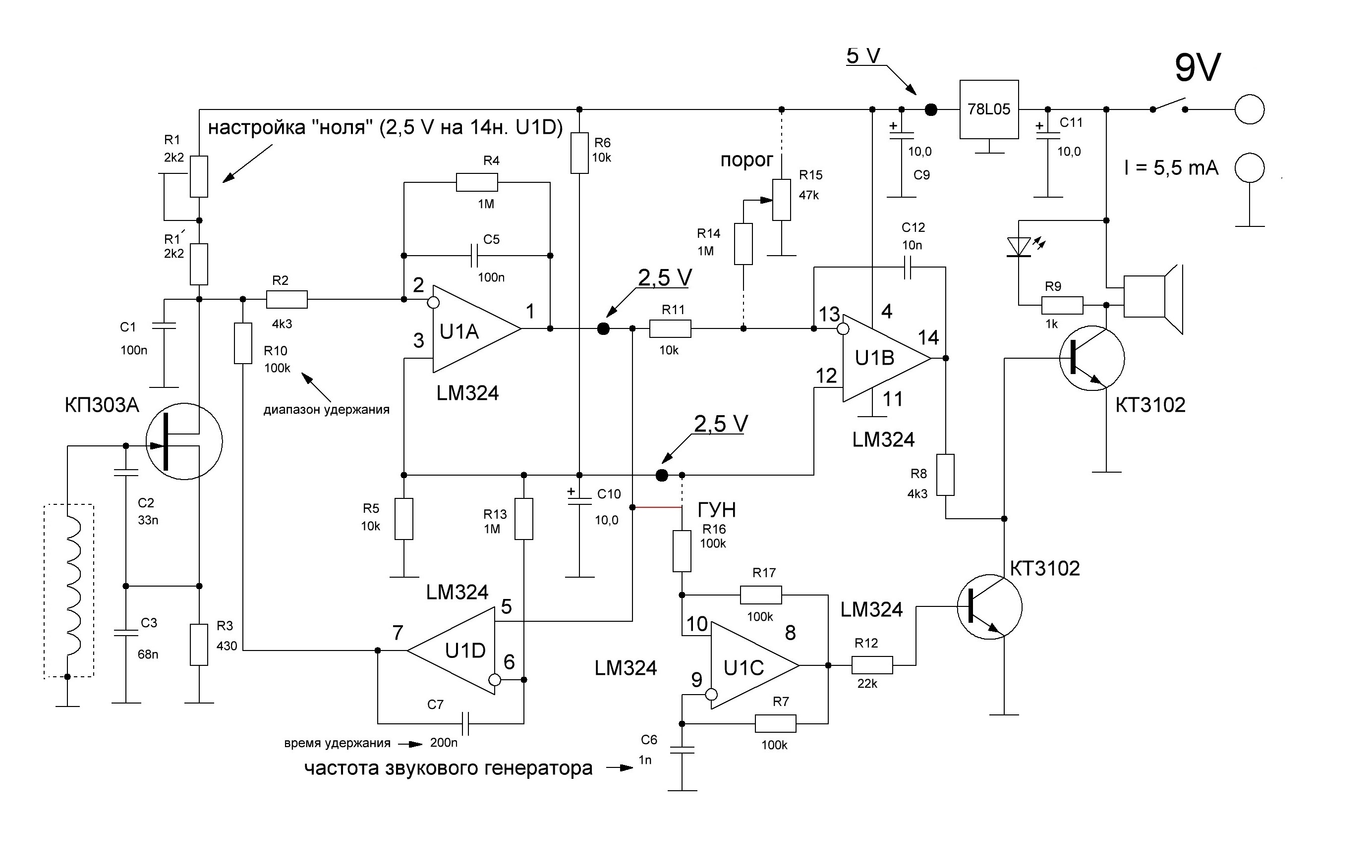 Васильевым. Принцип его работы, как и других миноискателей, основан на изменении частоты генератора по мере приближения к катушке металлического предмета. Чем ближе будет находиться такой предмет, тем большее влияние он будет оказывать на частоту генератора.
Васильевым. Принцип его работы, как и других миноискателей, основан на изменении частоты генератора по мере приближения к катушке металлического предмета. Чем ближе будет находиться такой предмет, тем большее влияние он будет оказывать на частоту генератора.
Конструктивная схема миноискателя на двух транзисторах
Генератор выполнен в соответствии со схемой емкостной трехточки. Генерация создается в результате положительной взаимосвязи эмиттерной и базовой цели транзистора. Частота генератора определяется емкостью конденсаторов и индуктивностью катушки. По мере приближения катушки к металлическому объекту наблюдается изменения в ее индуктивности. Если металл ферромагнитный, индуктивность будет увеличиваться и, соответственно, уменьшаться, когда предмет создан из цветного металла (меди или латуни). За изменениями частоты следит приемник, собранный на втором транзисторе. Частота второго генератора практически не отличается от частотных показателей первого генератора, поэтому разность частот подбирают с помощью подстроечника катушки.
Налаживания работы металлоискателя начинают с изменения параметров работы обоих транзисторов. Включают питание и производят замеры напряжения на первом транзисторе по отношению к общему проводу, т.е. «плюсу» питания. Данный показатель должен быть 2,1 В. Для того, чтобы наиболее точно подобрать напряжение, используют резистор. После этого делают замеры напряжения на втором транзисторе. Здесь показатель должен быть в рамках 1 В.
После того, как налажены все параметры, небыстрым перемещением подстроечника катушки добиваются появления громкого и чистого звука в головных телефонах. Если приблизить к миноискателю консервную банку, можно наблюдать изменения в тоне звучания. Обычно это фиксируется на расстоянии 30-40 см.
Такой миноискатель способен успешно обнаруживать банки, спрятанные на глубине до 30 см..jpg) Процесс генерации базируется на возникновении обратной связи между двумя катушками, что подключены к главной базе транзистора. Частота колебаний определяется индуктивностью первой катушки и емкостью конденсатора.
Процесс генерации базируется на возникновении обратной связи между двумя катушками, что подключены к главной базе транзистора. Частота колебаний определяется индуктивностью первой катушки и емкостью конденсатора.
Конструктивная схема миноискателя на трех транзисторах
На первом транзисторе размещается генератор, способный вырабатывать колебания с частотными показателями 80 – 100 кГц. Частота этого генератора неизменна (разумеется, если вблизи нет предмета из металла), а частота второго генератора изменяется в результате подстройки индуктивности катушки.
Переменные токи с частотами от обоих генераторов будут протекать через головные телефоны. Если частоту второго генератора подстроить под частоту первого, то можно будет услышать сначала звук низкой тональности, а потом так званые «нулевые биения». Однако, стоит теперь только поднести первый генератор к металлическому объекту, как в телефонах сразу же станут слышны соответствующие звуки.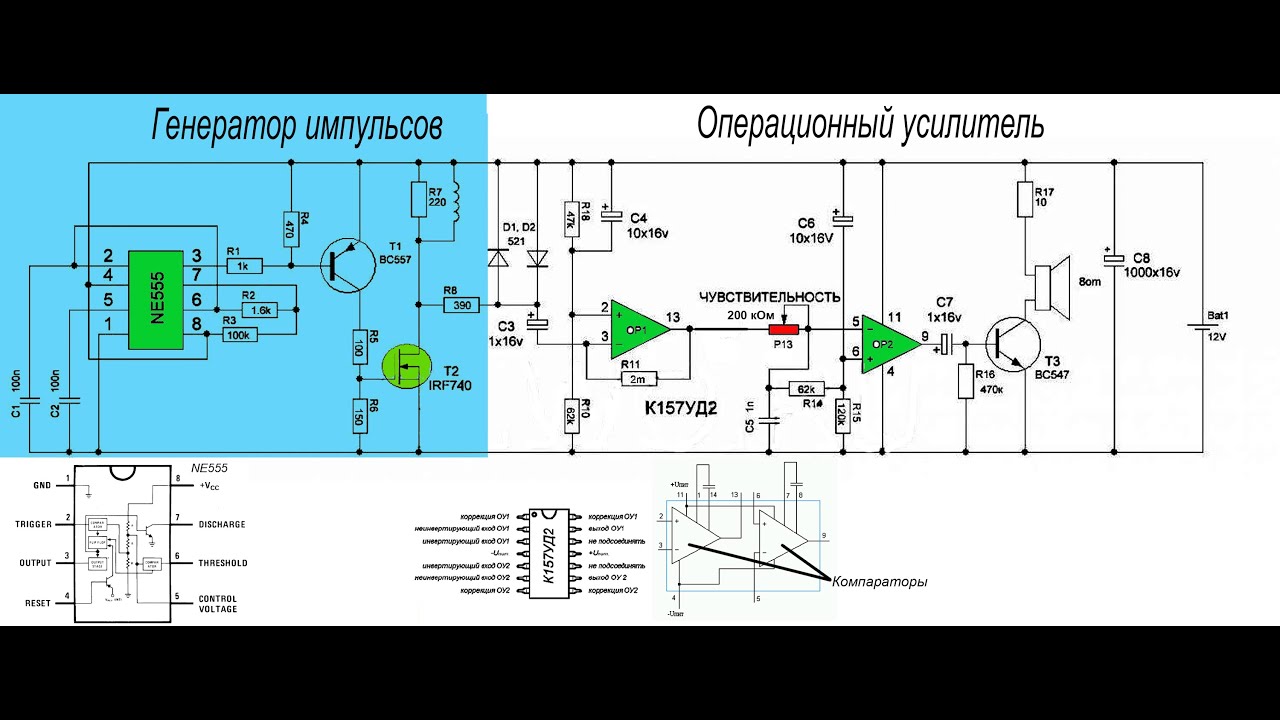
Как мы видим, налаживание работы миноискателя сводится к наиболее точному определению частоты первого генератора и аккуратной подстройке второго. Во время работы миноискатель нужно носить на близком расстоянии от земли и по изменениям тона в телефонах определять месторасположение «мин».
Принцип работы миноискателя на семи транзисторахМиноискатель на семи транзисторах был разработан А. Степановым. Такое количество транзисторов было использовано, чтобы получить прибор с очень высокой чувствительностью и возможностью четко отличать черные металлы от цветных.
Конструктивная схема миноискателя на семи транзисторах
Основывается работа прибора на принципе биения частот двух генераторов (один – опорный, второй – перестраиваемый). По мере приближения выносной катушки к металлическому предмету можно наблюдать изменения в ее индуктивности. В результате, меняется и частота генератора. Объект из цветного металла увеличивает частоту генератора и уменьшает индуктивность катушки, а предмет из черного металла – наоборот.
В результате, меняется и частота генератора. Объект из цветного металла увеличивает частоту генератора и уменьшает индуктивность катушки, а предмет из черного металла – наоборот.
Поскольку в миноискателе на семи транзисторах акцент сделан на стабильной частоте генератора, то прибор может работать на частоте биений от 1 до 10 Гц. Таким образом, значительно повышается чувствительность устройства и снижается уровень потребления ним тока от источника питания. Например, крупные предметы миноискатель успешно находит на глубине до полуметра, а гвозди – до 15 см.
Магазин металлоискателейКак работает индукционный миноискатель ИМП
Принцип работы миноискателя ИМП
В основе работы миноискателя ИМП лежит принцип индуктивного (или индукционного) баланса. Основа индукционного баланса — несколько катушек индуктивности, одна передающая и одна или две приёмные, образующие индуктивный датчик. Все катушки размещены в пространстве таким образом, что бы сигнал с передающей катушки при отсутствии поблизости металлических предметов не наводился на приёмные (или наводился, но сигнал, наведённый в одной катушке, вычитался бы из сигнала другой катушки), то есть вся система была бы сбалансирована и сигнал на выходе был бы равен нулю. Если теперь поблизости от датчика появится металлический объект, то баланс нарушится и на выходе появится сигнал рассогласования, который можно будет усилить. Более подробно принцип индукционного баланса описан в статье История металлоискателей.
Если теперь поблизости от датчика появится металлический объект, то баланс нарушится и на выходе появится сигнал рассогласования, который можно будет усилить. Более подробно принцип индукционного баланса описан в статье История металлоискателей.
В миноискателе ИМП применён цилиндрический датчик, содержащий три катушки — передающую TX, расположенную в центре датчика, и две приёмные RX (рис. 1.). Все катушки расположены в одной плоскости, обе приёмные катушки размещены симметрично относительно передающей. В тот момент, когда ток в передающей катушке направлен по часовой стрелке, то токи в приёмных катушках будут направлены в противоположную сторону. Это происходит из-за того, что наводки тока между ближайшими частями витков двух рядом находящихся катушек будут сильнее, чем между более удалёнными частями витков катушек.
Рис. 1. Схема расположения катушек в датчике миноискателя ИМП
Для того, что бы получить нулевой сигнал, сигналы с приёмных катушек следует подать на сумматор, как показано на рисунке 2. Здесь обе приёмные катушки включены противофазно — начало одной катушки и конец другой соединены с общим проводом, так что на суммирующий резистор подаются противофазные сигналы, которые взаимно компенсируются. При малейшем нарушении баланса системы на сумматоре появляется сигнал рассогласования, этот сигнал усиливается резонансным усилителем и подаётся на головные телефоны.
Рис. 2. Упрощённая схема металлодетектора, поясняющая принцип индукционного баланса.
В реальной схеме миноискателя ИМП (рис. 3.) используется несколько иной принцип компенсации остаточного сигнала. Здесь вместо суммирующего резистора применён трансформатор, и небольшая часть сигнала с задающего генератора подмешивается в остаточный сигнал. Величину и фазу сигнала, поступающего с задающего генератора можно регулировать переменными резисторами таким образом, что бы этот сигнал был равен по амплитуде и противоположен по фазе остаточному сигналу, так что на выходе системы установится нулевой сигнал.
Рис. 3. Упрощённая схема миноискателя ИМП
Такой способ позволяет компенсировать не только дисбаланс катушек, но и наводки задающего генератора на входные цепи усилителя.
Электронная схема миноискателя ИМП
Рабочая частота миноискателя ИМП — 1,5 кГц. Потребляемый ток — не более 28 мА. Напряжение питания — от 5,0 до 6,2 В (4 элемента 373). Время непрерывной работы от одного комплекта свежих элементов питания — 100 часов.
На рисунке 4 изображена электрическая схема миноискателя. Она состоит из генератора, вырабатывающего частоту 1,5 кГц, устройства компенсации и резонансного усилителя с рабочей частотой 1,5 кГц и с коэффициентом усиления по напряжению примерно 1000 раз.
Генератор выполнен по двухтактной схеме на двух транзисторах Т1 и Т2 типа МП15. Генераторная катушка частично включена в коллекторные цепи транзисторов. Индуктивность передающей катушки составляет 45 мГн, число витков — 970 провода ПЭВ-0,33, отводы сделаны примерно от четверти витков, считая с каждой стороны. Сопротивление обмотки — 13 Ом. Катушка имеет стальной сердечник. Рабочая частота генератора зависит от индуктивности этой катушки и ёмкости конденсатора С1.
Сопротивление обмотки — 13 Ом. Катушка имеет стальной сердечник. Рабочая частота генератора зависит от индуктивности этой катушки и ёмкости конденсатора С1.
Приёмные катушки имеют индуктивность по 400 мГн, они содержат по 3500 витков провода ПЭВ-0,1, намотанного на каркасе диаметром примерно 35 мм.
Использование двухтактного генератора в схеме миноискателя ИМП обусловлено несколькими причинами — во-первых, в то время, когда разрабатывался этот миноискатель, в наличии были только транзисторы одной структуры — p-n-p. Во-вторых, для питания схемы двухтактного генератора на транзисторах одной структуры потребуется меньшее напряжение по сравнению с другими схемами генераторов.
Схема компенсации выполнена на резисторах R1 — R8 и конденсаторах С1 и С2. Переменными резисторами R5, R8 осуществляется грубая регулировка амплитуды и фазы, а резисторами R2, R7 — плавная.
Переменное напряжение поступает в схему компенсации с одного из отводов генераторной катушки.
Рис 4. Принципиальная электрическая схема миноискателя ИМП:
Принципиальная электрическая схема миноискателя ИМП:
ПК — приёмная катушка — 400 мГн; ГК — генераторные катушки — по 45 мГн; Т1, Т2 — МП15; Т3..Т5 — МП13Б;
R1, R3 — 39к; R2 — 22к; R4,R6 — 4,7мОм; R5 — 100к; R7,R8 — 47к; R9 — 3к; R10 — 6,2к; R11 — 2,2к; R12 — 240; R13 — 5,6к;
R14 — 4,3к; R15 — 10к; R16 — 120; R17,R18 — 8,2к; R19 — 4,3к; R20,R29 — 82; R21,R26 — 4,7к;
R22,R27 — 1к; R23 — 270; R24 — 2,7к; R25 — 39; R28 — 120;
C1 — 5,1пФ; C2 — 27пФ; C3,C4 — 3,3нФ; C5 — 10нФ; C6 — 25мкФ; C7,C9 — 680пФ; C8,C10,C13 — 0,25мкФ; C12 — 3,3нФ;
Тф — Телефоны головные ТА-56М
На транзисторах Т3..Т5 типа МП13Б выполнен резонансный усилитель. Сигнал на его вход поступает со вторичной обмотки понижающего трансформатора Тр, коэффициент трансформации которого составляет примерно 3:1. Так как входное сопротивление первого каскада усилителя, выполненного на транзисторе Т1 относительно невысоко, то применение понижающего трансформатора позволяет согласовать низкоомный вход усилителя с высоким выходным сопротивлением приёмных катушек. Так же осуществляется согласование других каскадов — здесь используются трансформаторы с коэффициентом трансформации 1:8, первичные обмотки которых включены частично в цепи коллекторов транзисторов Т4, Т5. Такое частичное включение (включена 1/4 часть витков) позволяет избежать ухудшения добротности. Совместно с конденсаторами С7, С9 первичные обмотки обоих трансформаторов образуют резонансные контуры, настроенные на частоту 1,5 кГц. Головные телефоны ТА-56М, включённые в коллекторную цепь транзистора Т5 совместно с конденсатором С12 образуют резонансный контур, настроенный на ту же частоту, что позволяет повысить громкость звука в наушниках.
Так же осуществляется согласование других каскадов — здесь используются трансформаторы с коэффициентом трансформации 1:8, первичные обмотки которых включены частично в цепи коллекторов транзисторов Т4, Т5. Такое частичное включение (включена 1/4 часть витков) позволяет избежать ухудшения добротности. Совместно с конденсаторами С7, С9 первичные обмотки обоих трансформаторов образуют резонансные контуры, настроенные на частоту 1,5 кГц. Головные телефоны ТА-56М, включённые в коллекторную цепь транзистора Т5 совместно с конденсатором С12 образуют резонансный контур, настроенный на ту же частоту, что позволяет повысить громкость звука в наушниках.
При подаче напряжения питания на схему запускается задающий генератор, и вокруг генераторной катушки образуется переменное магнитное поле. Это поле наводится в обоих приёмных катушках, в результате чего в них начинает течь переменный ток. Приёмные катушки соединены таким образом, что бы токи, протекающие в них, взаимно компенсировались и система была бы сбалансирована.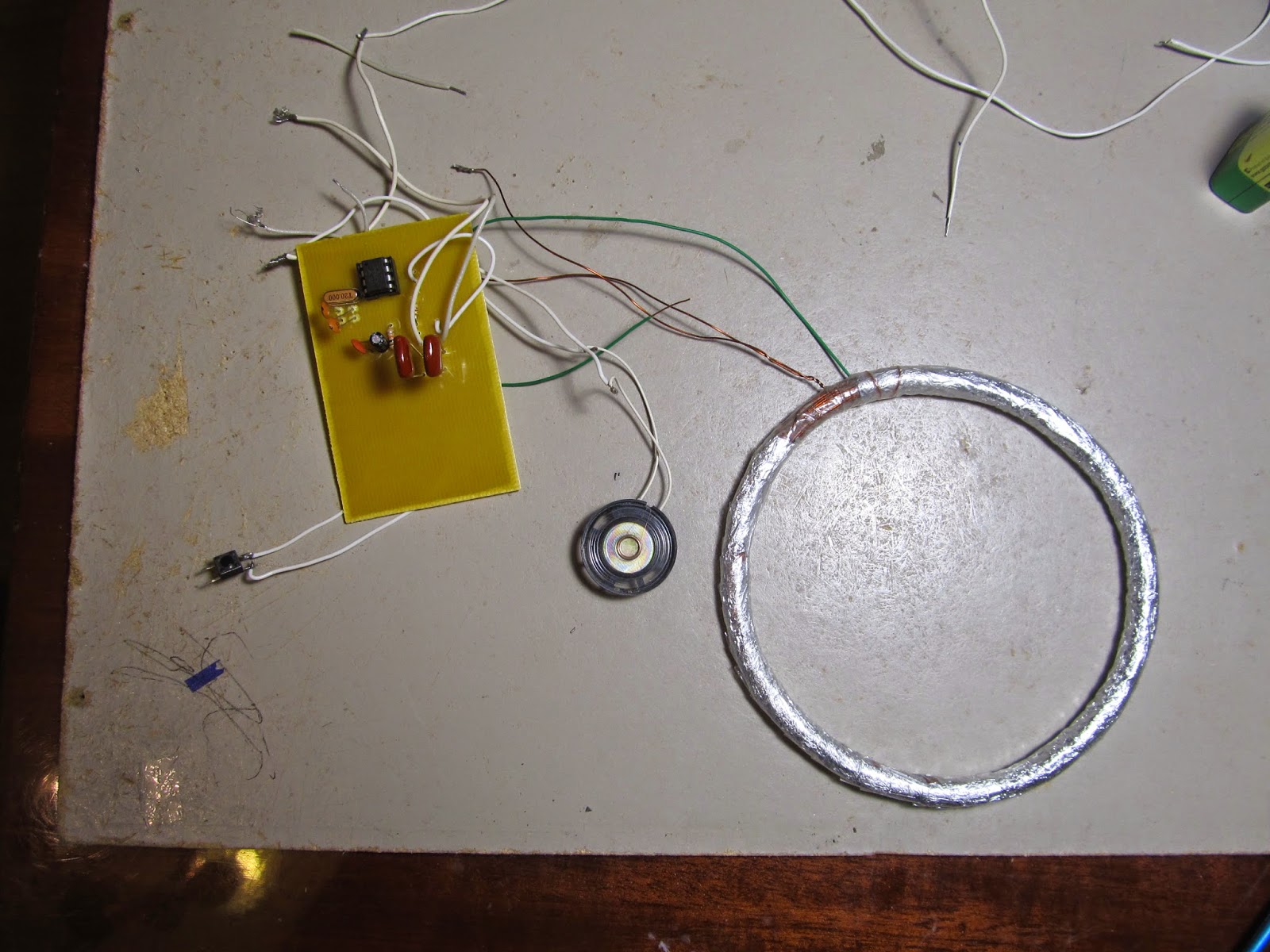 Из-за технических трудностей, не позволяющих изготовить поисковый элемент с идеально правильным взаимным расположением приёмных катушек и из-за разброса величин индуктивностей, во встречно включённых катушках всегда будет присутствовать какой-то остаточный сигнал. Что бы его подавить, применяется схема компенсации.
Из-за технических трудностей, не позволяющих изготовить поисковый элемент с идеально правильным взаимным расположением приёмных катушек и из-за разброса величин индуктивностей, во встречно включённых катушках всегда будет присутствовать какой-то остаточный сигнал. Что бы его подавить, применяется схема компенсации.
Если рядом с датчиком миноискателя отсутствуют металлические предметы и системой компенсации подавлен остаточный сигнал, то на входе резонансного усилителя сигнал будет отсутствовать. Если теперь поблизости от поискового датчика появится металлический объект, то из-за возмущения магнитного поля система разбалансируется, и на входе усилителя появится сигнал, который можно будет услышать в наушниках.
Подробнее о миноискателе ИМП можно прочитать здесь
BACK
Импульсный металлоискатель (044)
Начинающим, радиоконструктор: Импульсный металлоискатель. (044)
В этом варианте представлена принципиально новая схема металлоискателя в отличие от
вариантов (015-Б) и (043-М). Это устройство содержит больше деталей, сложнее функционально. Схема состоит из: генератора импульсов с частотой около 140Гц на микросхеме таймере КР1006ВИ1 или её импортном аналоге NE555; усилителе импульсов на транзисторах VT1,VT2;
Это устройство содержит больше деталей, сложнее функционально. Схема состоит из: генератора импульсов с частотой около 140Гц на микросхеме таймере КР1006ВИ1 или её импортном аналоге NE555; усилителе импульсов на транзисторах VT1,VT2;
приёмо-передающей катушки L1; ограничителя на диодах VD1,VD2, в качестве которых можно применить любые маломощные кремниевые диоды; двух малошумящих операционных усилителей (ОУ), входящих в состав микросхемы К157УД2; приёмного усилителя на транзисторе VT3. Рассмотрим принцип работы металлоискателя: микросхема таймер DD1 вырабатывает короткие (около 130мкс) импульсы с частотой 140Гц. С выхода 3 через резистор R1 импульсы поступают на базу транзистора VT1, усиливаются и через резистор R5 приходят
на затвор мощного полевого транзистора VT2, выполняющего роль транзисторного ключа.
Вместо указанного на схеме можно применить другой полевой транзистор с аналогичной структурой, например, IRF720, IRF540, IRFZ44, IRFZ48, FS5KM10 и др. Главное, чтобы сопротивление канала в открытом состоянии было минимальным (единицы Ом). Далее усиленный импульс поступает на катушку. Проходящий через её обмотку ток возбуждает вокруг катушки магнитное поле, которое в свою очередь при наличии в зоне поиска металлических предметов, наводит в них затухающие вихревые токи, которые в свою очередь возбуждают магнитное поле, наводящее ток в катушке. В результате этого сигнал с выхода катушки меняет свою форму и длительность. Через резистор R8 сигнал поступает на ограничитель VD1,VD2 – диоды, включенные встречно-параллельно. Они защищают вход ОУ DD2.1 от мощного импульса в катушке и не дают напряжению на входе подняться выше 0,5 вольт. Через С3 принятый сигнал поступает на инвертирующий вход 2 ОУ DD2.1, выполняющего функцию дифференциального усилителя. На неинвертирующий вход 3 подаётся напряжение смещения ОУ. Усиленный сигнал с выхода 13 через переменные резисторы R12,R13 поступает на вход 5 и через R14 на вход 6 ОУ DD2.2, который выполняет функцию компаратора. С его выхода 9 сигнал через С7 поступает на приёмный усилитель VT3.
Далее усиленный импульс поступает на катушку. Проходящий через её обмотку ток возбуждает вокруг катушки магнитное поле, которое в свою очередь при наличии в зоне поиска металлических предметов, наводит в них затухающие вихревые токи, которые в свою очередь возбуждают магнитное поле, наводящее ток в катушке. В результате этого сигнал с выхода катушки меняет свою форму и длительность. Через резистор R8 сигнал поступает на ограничитель VD1,VD2 – диоды, включенные встречно-параллельно. Они защищают вход ОУ DD2.1 от мощного импульса в катушке и не дают напряжению на входе подняться выше 0,5 вольт. Через С3 принятый сигнал поступает на инвертирующий вход 2 ОУ DD2.1, выполняющего функцию дифференциального усилителя. На неинвертирующий вход 3 подаётся напряжение смещения ОУ. Усиленный сигнал с выхода 13 через переменные резисторы R12,R13 поступает на вход 5 и через R14 на вход 6 ОУ DD2.2, который выполняет функцию компаратора. С его выхода 9 сигнал через С7 поступает на приёмный усилитель VT3. Если схема собрана правильно, необходимо только установить уровень чувствительности прибора. Катушку размещаем так, чтобы возле неё не было металлических предметов. Выводим ручку R13 в среднее положение, а R12 выводим положение минимального сопротивления. Подаём на схему напряжение, в динамике будет звучать жужжание с частотой генератора. Резистор R12 выводим в положение, при котором звук генератора в динамике начнёт пропадать, появятся щелчки (реакция компаратора на изменение параметров принимаемого сигнала). Это будет рабочим режимом металлоискателя. Дальнейшие настройки осуществляются резистором R13. Прибор наиболее чувствителен при прослушивании минимального количества щелчков в динамике. Далее подносим металлический предмет к катушке, частота щелчков в динамике должна увеличиваться. Далее экспериментируем с поиском предметов, крупные обнаруживаются на глубине более 1 метра.
Если схема собрана правильно, необходимо только установить уровень чувствительности прибора. Катушку размещаем так, чтобы возле неё не было металлических предметов. Выводим ручку R13 в среднее положение, а R12 выводим положение минимального сопротивления. Подаём на схему напряжение, в динамике будет звучать жужжание с частотой генератора. Резистор R12 выводим в положение, при котором звук генератора в динамике начнёт пропадать, появятся щелчки (реакция компаратора на изменение параметров принимаемого сигнала). Это будет рабочим режимом металлоискателя. Дальнейшие настройки осуществляются резистором R13. Прибор наиболее чувствителен при прослушивании минимального количества щелчков в динамике. Далее подносим металлический предмет к катушке, частота щелчков в динамике должна увеличиваться. Далее экспериментируем с поиском предметов, крупные обнаруживаются на глубине более 1 метра.
Содержание 044:
1. Микросхема КР1006ВИ1 (NE555),
2. Панелька для микросхемы DIP8,
3.
 Микросхема К157УД2,
Микросхема К157УД2,4. Панелька для микросхемы DIP14,
5. Печатная плата,
6. Динамик,
7. Поисковая катушка (25 витков),
8. Полевой транзистор VT2 — IRF740(540, 720),
9. Транзистор VT1 – КТ361,
10. Транзистор VT3 – КТ315,
11. Диоды VD1, VD2 – 1N4148 (КД521, КД522) (2 шт.),
12. Подстроечный резистор R12 – 50к,
13. Переменный резистор R13 – 20к,
14. Ручка для переменного резистора,
15. Резисторы постоянные:
R1 – 1к (Кч/Ч/Кр),
R2 – 1,5к (Кч/Зел/Кр),
R3 – 100к (Кч/Ч/Ж),
R4 – 510 Ом (Зел/Кч/Кч),
R5 – 100 Ом (Кч/Ч/Кч),
R6 – 150 Ом (Кч/Зел/Кч),
R7 – 240 Ом (Кр/Ж/Кч),
R8 – 330 Ом (Ор/Ор/Кч),
R9 – 51к (Зел/Кч/Ор),
R10, R14 – 68к (Гол/Кр/Ор) (2 шт.),
R11 – 2,2М (Кр/Кр/Зел),
R15 – 120к (Кч/Кр/Ж),
R16 – 470к (Ж/Ф/Ж),
R17 – 10 Ом (Кч/Ч/Ч),
16. Конденсаторы:
С1, С2 – 0,1МкФ (100Н, 104) (2 шт.),
С3, С7 – 1МкФ (2 шт.),
С4, С6 – 10МкФ (2 шт.),
С5 – 1Н (1000пФ, 102),
С8 – 1000МкФ,
17. Схема и описание.
Схема и описание.
Время непрерывной пайки одной точки не должно превышать трёх секунд
При сборке схемы соблюдайте полярность подключения питания, стрелочного прибора,
электролитического конденсатора, выпрямительных диодов и цоколёвку при установке микросхемы в панельку!
Простой металлоискатель «Метелик» | NiceTV
Схема простого металлоискателя
Схема второй версии металлоискателя
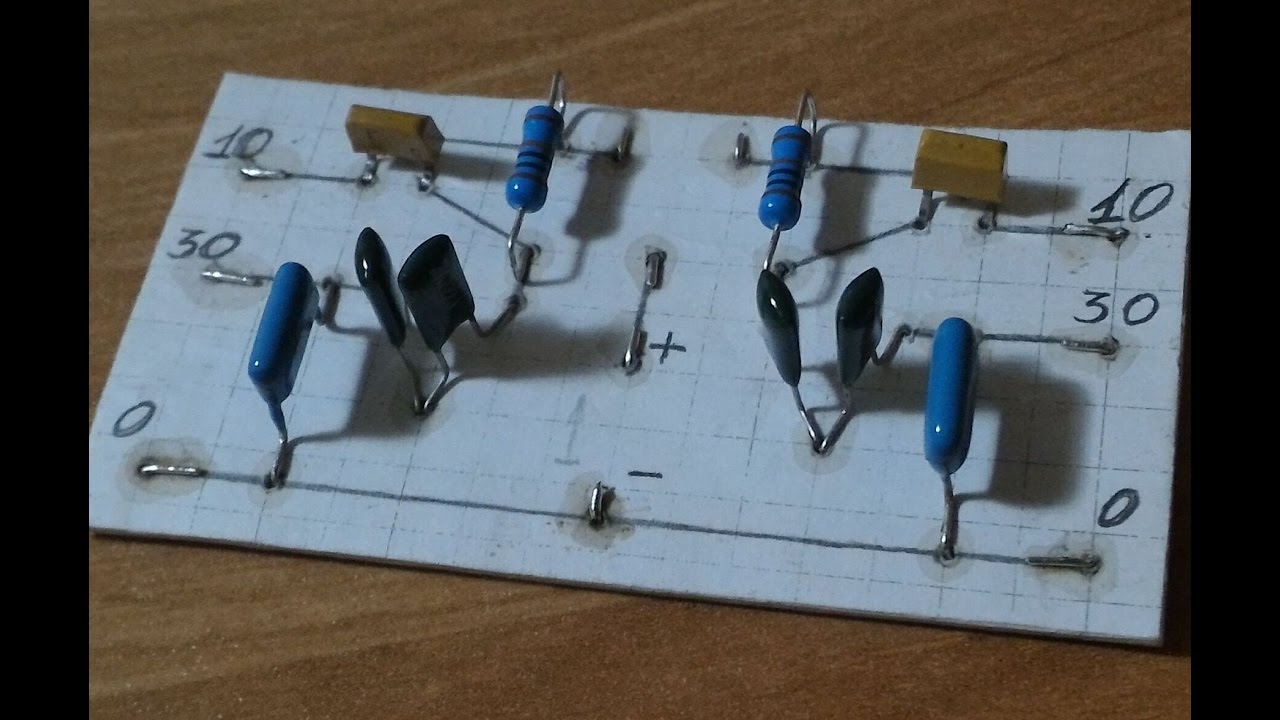
Прислана схема очень простого металлоискателя «Метелик». Состоит из двух генераторов на кт315. Можно использовать и другой высокочастотный транзистор. Рабочая частота составляет не более 0,5 МГц (по-видимому 150-200кГц). В спокойном состоянии генераторы вырабатывают одну и ту же частоту. Разность которой даёт модуляцию. Это довольно сложно добиться — синхроной работы генераторов, поэтому девиация (скорее всего) будет присутствовать постоянно — низкочастотный писк. Но как только рамку-антенну подведут к металлическому предмету изменится частота одного из генераторов (частота снижается). Эта разность между двумя генераторами будет смодулирована в динамик. Чем ближе к металлу, тем больше меняется тональность звука. По звуку можно определить о металлическом предмете в зоне действия металлоискателя. Схему питают от аккумуляторной батареи, хватает до 20-30 часов работы. Используются обычные низкоомные наушники.
Но как только рамку-антенну подведут к металлическому предмету изменится частота одного из генераторов (частота снижается). Эта разность между двумя генераторами будет смодулирована в динамик. Чем ближе к металлу, тем больше меняется тональность звука. По звуку можно определить о металлическом предмете в зоне действия металлоискателя. Схему питают от аккумуляторной батареи, хватает до 20-30 часов работы. Используются обычные низкоомные наушники.
Конструкция металлоисктеля
Рамка-антенна в диаметре 15 см, мотают 30 + 10 витков. Количество витков может быть и больше, но рамки должны быть одинаковыми. Схема собирается и устанавливается «навесным монтажем». Её приклеивают к куску легкого и прочного пластика, либо картона, но его нужно обработать водонепроинциаемым лаком.
Монтаж деталей
Детали распологают как можно меньшим растоянием друг от друга. Желательно чтобы детали генераторов были одинаковыми.
Фото металлискателя.
Конструкцию крепят на пластмассовую трубу, либо можно использовать деревянную палку. Вероятно возникнет необходимость настройки генераторов. Без осциллографа такую настройку трудно произвести. Главное чтобы разность между генераторами в спокойном состоянии была как можно меньше.
Владимир.
Металлоискатель Fisher CZ21-10
Подводные металлодетекторы от Fisher – не такая новость, но новый FISHER CZ21-10 заслуживает внимания, это, поистине, уникальный металлоискатель, которому покорятся и морские глубины и просторы полей, детектор, который ждали поисковики многих стран – мощный, надежный, универсальный! Возможность работы в двух средах, несколько рабочих частот, три режима поиска – все это новый FISHER CZ21!
Уникальные технологии, которые реализованы в этом приборе, позволят любому поисковику извлечь из земли множество потрясающих артефактов, при этом настройка и функционал металлоискателя FISHER CZ21-10 просты и не занимают много времени. Все в металлоискателе FISHER CZ21-10 необычно. Конечно тому, кто был знаком с FISHER CZ20-10, предшественником нашего прибора, многое в новичке покажется таким же, или очень похожим, но FISHER CZ21-10 сильно отличается от 20-й серии. Конструктив штанг необычен для грунтовых металлоискателей – это связано с тем, что конструкторы старались максимально снизить общий вес прибора, поэтому решили применить двухсекционную Т-образную штангу. Верхняя штанга алюминиевая и покрашена в белый цвет, нижняя штанга сделана из высокопрочного пластика – карбона, который противостоит серьезным нагрузкам и спокойно несет на себе большую 10 дюймовую катушку, идущую в комплекте с прибором.
Все в металлоискателе FISHER CZ21-10 необычно. Конечно тому, кто был знаком с FISHER CZ20-10, предшественником нашего прибора, многое в новичке покажется таким же, или очень похожим, но FISHER CZ21-10 сильно отличается от 20-й серии. Конструктив штанг необычен для грунтовых металлоискателей – это связано с тем, что конструкторы старались максимально снизить общий вес прибора, поэтому решили применить двухсекционную Т-образную штангу. Верхняя штанга алюминиевая и покрашена в белый цвет, нижняя штанга сделана из высокопрочного пластика – карбона, который противостоит серьезным нагрузкам и спокойно несет на себе большую 10 дюймовую катушку, идущую в комплекте с прибором.
Соединение штанг между собой осуществляется только посредством одной пружинной кнопки – так сделано специально, чтобы в условиях подводного поиска оператор-дайвер мог легко изменять геометрию прибора за считанные секунды. Большое количество регулировочных отверстий на верхней штанге обеспечивает регулировку размера металлоискателя в широком диапазоне. Глубокий подлокотник снабжен мягким вкладышем из пористого пластика, в нем имеются прорези для крепления лямки, поставляющейся опционально. Ручка прибора обтянута специальным покрытием, сама ручка большая, что позволяет работать металлоискателем в подводных перчатках, не испытывая дискомфорта, впрочем, в полевых условиях она не менее комфортна и делает долговременную работу с прибором удовольствием.
Глубокий подлокотник снабжен мягким вкладышем из пористого пластика, в нем имеются прорези для крепления лямки, поставляющейся опционально. Ручка прибора обтянута специальным покрытием, сама ручка большая, что позволяет работать металлоискателем в подводных перчатках, не испытывая дискомфорта, впрочем, в полевых условиях она не менее комфортна и делает долговременную работу с прибором удовольствием.
Катушка FISHER CZ21-10 – уникальна, она была специально разработана для этого прибора и помогает беспрепятственно вести поиск на больших глубинах в морях, пресноводных водоемах, а также пляжах и в любых других местах, которые выберет для изысканий владелец металлоискателя. Катушка изготовлена в DD формате, прочный пластик корпуса в сочетании со специальным наполнителем и новейшие технологии при изготовлении являются гарантией того, что датчик будет обладать превосходными качествами во время длительной эксплуатации. Четкость работы этого датчика поражает – отсутствие ложных срабатываний, прекрасная идентификация при определении металла обнаруженного предмета, точный пинпоинтинг – стоит взять в руки FISHER CZ21-10, чтобы убедиться в верности этих слов, ведь этот металлоискатель уже успел завоевать сердца многих поисковиков!
Кабель катушки достаточно длинный, чтобы использовать металлоискатель в нескольких вариантах сборки.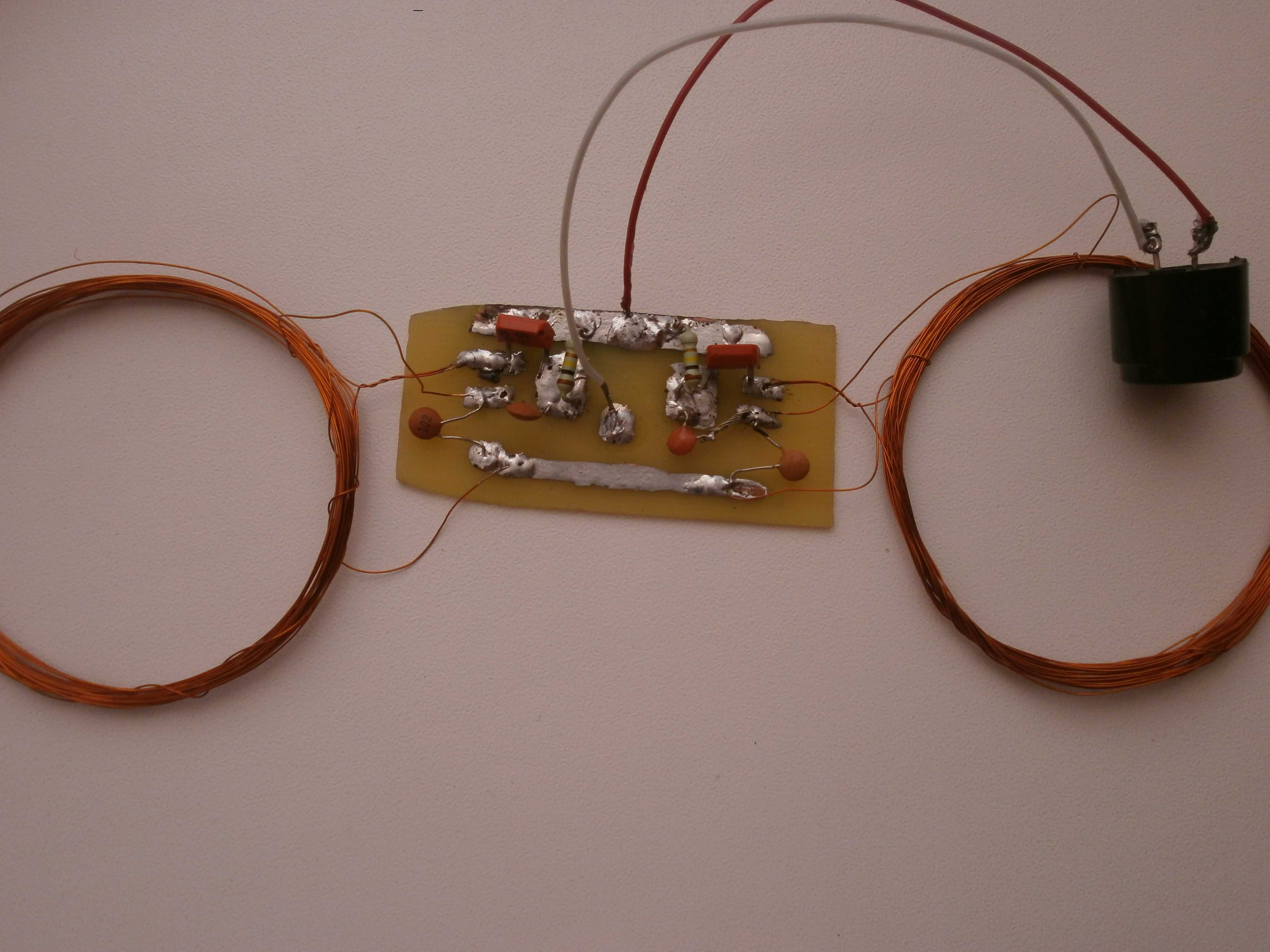 При подводном поиске используется схема, при которой блок управления размещается на верхней штанге, а при наземном поиске его можно перенести на пояс, тем самым существенно облегчив конструкцию. В комплект поставки входит специальный пластиковый зацеп, при помощи которого блок управления удобно крепится на ремне. Для исключения болтания шнура на штанге применяются два хомутика, входящих в комплект поставки металлоискателя. Нужно отметить, что FISHER CZ21-10 не может быть модернизирован заменой катушки – из-за того, что прибор может быть использован на больших глубинах, конструкторы решили выполнить штекер катушки неразъемным. В комплект поставки входят и наушники, которые также нельзя отсоединить от блока управления. Пьезонаушники актуальны во всех поисковых ситуациях, и менять их нет необходимости. Наушники очень качественные, ведь FISHER CZ21-10 – это металлоискатель, у которого нет визуальной индикации о найденном предмете, оператор ориентируется только на звук, поэтому крайне важно обеспечить такое его качество, при котором поисковик может с точностью определять найденный предмет.
При подводном поиске используется схема, при которой блок управления размещается на верхней штанге, а при наземном поиске его можно перенести на пояс, тем самым существенно облегчив конструкцию. В комплект поставки входит специальный пластиковый зацеп, при помощи которого блок управления удобно крепится на ремне. Для исключения болтания шнура на штанге применяются два хомутика, входящих в комплект поставки металлоискателя. Нужно отметить, что FISHER CZ21-10 не может быть модернизирован заменой катушки – из-за того, что прибор может быть использован на больших глубинах, конструкторы решили выполнить штекер катушки неразъемным. В комплект поставки входят и наушники, которые также нельзя отсоединить от блока управления. Пьезонаушники актуальны во всех поисковых ситуациях, и менять их нет необходимости. Наушники очень качественные, ведь FISHER CZ21-10 – это металлоискатель, у которого нет визуальной индикации о найденном предмете, оператор ориентируется только на звук, поэтому крайне важно обеспечить такое его качество, при котором поисковик может с точностью определять найденный предмет.
Блок управления металлоискателя крепится на ручке верхней штанги. На задней его стороне расположены два штекера – катушки и наушников, а также крышка батарейного отсека. Металлоискатель работает от четырех 9-и вольтовых батарей типа «Крона», энергии которых достаточно для более чем 40-ка часового поиска. Производитель советует использовать только качественные алкалиновые батареи, или аккумуляторы. Крышка батарейного отсека и сам батарейный отсек необычны. Крышка батарейного отсека крепится при помощи двух болтов и имеет специальную эластичную прокладку, которая защищает отсек от проникновения воды. А сам отсек отделен от электроники, поэтому даже если обстоятельства окажутся сильнее и в батарейный отсек попадет вода, необходимо будет всего лишь вынуть батареи, промыть его и удалить остатки влаги, чтобы продолжить подводную охоту! Металлоискатель может работать на глубине 76 метров, поэтому и способы защитить его электронную начинку особые.
Панель управления металлоискателя FISHER CZ21-10 имеет всего четыре переключателя и одну кнопку. Конструкторы позаботились о тех, кто решил приступить к поиску немедленно, и пометили красными кружочками на каждой из четырех шкал потенциометров те позиции, которые позволяют настроить детектор на быстрый поиск, для тех, кто хочет проникнуть в самые тонкости поиска и находить ценные предметы на максимальной глубине, существуют формулы тонкой настройки, подробно и в то же время просто описанные в инструкции. Металлоискатель FISHER CZ21-10 уникален тем, что он работает на двух частотах – глубинной частоте 3 кГц и частоте, позволяющей обнаруживать очень мелкие цветные цели – 15 кГц. Такое уникальное сочетание в комплексе с принципом анализа сигнала с применением рядов Фурье дает возможность точно идентифицировать любые металлические предметы – будь то монеты или золотые самородки. У металлодетектора имеются три режима работы – бесшумный динамический режим с дискриминацией, динамический режим все металлы с пороговым шумом и статический режим все металлы, используемый при включении функции определения точного местоположения цели (пинпоинтинг).
Конструкторы позаботились о тех, кто решил приступить к поиску немедленно, и пометили красными кружочками на каждой из четырех шкал потенциометров те позиции, которые позволяют настроить детектор на быстрый поиск, для тех, кто хочет проникнуть в самые тонкости поиска и находить ценные предметы на максимальной глубине, существуют формулы тонкой настройки, подробно и в то же время просто описанные в инструкции. Металлоискатель FISHER CZ21-10 уникален тем, что он работает на двух частотах – глубинной частоте 3 кГц и частоте, позволяющей обнаруживать очень мелкие цветные цели – 15 кГц. Такое уникальное сочетание в комплексе с принципом анализа сигнала с применением рядов Фурье дает возможность точно идентифицировать любые металлические предметы – будь то монеты или золотые самородки. У металлодетектора имеются три режима работы – бесшумный динамический режим с дискриминацией, динамический режим все металлы с пороговым шумом и статический режим все металлы, используемый при включении функции определения точного местоположения цели (пинпоинтинг). Потенциометр VOLUME служит для включения металлоискателя и для регулировки громкости отклика, но конструкторы пошли дальше и разделили шкалу громкости на два сектора. В диапазоне делений от 1 до 5 происходит усиление громкости от любых целей, а в диапазоне от 6 до 10 отклик от крупных целей остается постоянным, но происходит усиление отклика от мелких и очень глубоких целей. Это сделано специально, поскольку поиск в поле существенно отличается от поиска под водой, когда есть вероятность пропуска глубоких и мелких целей. Отметка 5 обведена красным кружком – производитель советует использовать это положение потенциометра для быстрого поиска без предварительных настроек.
Потенциометр VOLUME служит для включения металлоискателя и для регулировки громкости отклика, но конструкторы пошли дальше и разделили шкалу громкости на два сектора. В диапазоне делений от 1 до 5 происходит усиление громкости от любых целей, а в диапазоне от 6 до 10 отклик от крупных целей остается постоянным, но происходит усиление отклика от мелких и очень глубоких целей. Это сделано специально, поскольку поиск в поле существенно отличается от поиска под водой, когда есть вероятность пропуска глубоких и мелких целей. Отметка 5 обведена красным кружком – производитель советует использовать это положение потенциометра для быстрого поиска без предварительных настроек.
Как уже было сказано, FISHER CZ21-10 имеет только звуковую индикацию, поэтому конструкторы сделали ее предельно простой и понятной: звук имеет три тональности отклика, где низкий тон обозначает предметы из железа, а средний и высокий тона – предметы из различных цветных металлов. Сочетание из двух рабочих частот и качественная обработка сигнала от цели приводит к тому, что оператор слышит совершенно чистый звук отклика, время на идентификацию каждой обнаруженной цели сведено к минимуму! Есть и еще один тип отклика, который появляется, когда под катушкой оказывается неглубокий и большой объект. Этот отклик обозначает перегрузку прибора и требует от поисковика приподнять катушку над целью для ее идентификации.
Этот отклик обозначает перегрузку прибора и требует от поисковика приподнять катушку над целью для ее идентификации.
Регулятор DISC, расположенный на панели управления внизу слева, отвечает за уровень дискриминации. Положения от 0 до 6 отвечают за регулировку уровня дискриминации в режиме бесшумного динамического поиска, отметка AUTO TUNE предназначена для переключения металлоискателя врежим поиска все металлы с пороговым шумом. Система дискриминации FISHER CZ21-10 – последовательная, то есть нельзя исключить из поиска некоторые объекты с высокой проводимостью, оставив в зоне приема железные артефакты, на практике это означает, что вы последовательно исключаете из поиска сначала низкопроводящие цели, такие, как железо, потом фольгу, а затем уж и мелкие цели из цветных металлов, поэтому, в идеале, лучше работать на минимальных уровнях дискриминации, чтобы не пропустить сигнал от ценного предмета. Если поисковая площадка чиста от металломусора, лучше перейти в режим все металлы, который, благодаря тому, что сигнал минует фильтры, обладает предельной чувствительностью к мелким предметам и позволяет находить цели очень глубоко, гораздо глубже, чем в режиме дискриминации.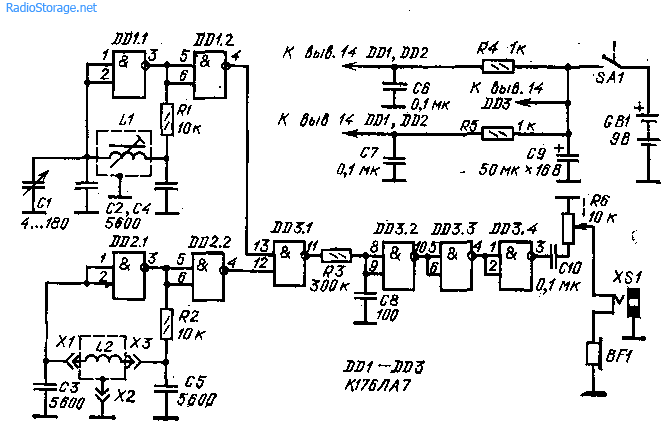 Этот режим будет полезен и золотоискателям и археологам, проводящим глубинную разведку местности и тем, кого интересуют любые металлические находки. В режиме все металлы нет разделения тонов отклика, оператор слышит один тон отклика, отличающийся только интенсивностью, которая позволяет судить о размере цели и глубине ее залегания. На нижней стороне блока управления нанесена удобная шкала, благодаря которой можно быстро сориентироваться, какие цели становятся «невидимыми» при конкретных положениях дискриминатора.
Этот режим будет полезен и золотоискателям и археологам, проводящим глубинную разведку местности и тем, кого интересуют любые металлические находки. В режиме все металлы нет разделения тонов отклика, оператор слышит один тон отклика, отличающийся только интенсивностью, которая позволяет судить о размере цели и глубине ее залегания. На нижней стороне блока управления нанесена удобная шкала, благодаря которой можно быстро сориентироваться, какие цели становятся «невидимыми» при конкретных положениях дискриминатора.
Потенциометр SENS отвечает за настройку уровня чувствительности металлоискателя и позволяет регулировать настройку металлоискателя под конкретные условия поиска. Конечно, с увеличением уровня чувствительности растет глубина обнаружения, но высокоминерализованные почвы не дают возможности вести поиск на предельных позициях потенциометра, однако это совсем не означает, что вы не сможете вести активный поиск на начальных отметках шкалы чувствительности: FISHER CZ21-10 мощный прибор и настроив его правильно, вы получите отличные результаты! При помощи регулятора SENS можно контролировать и уровень заряда батарей, для этого необходимо перевести потенциометр в положение BATT TEST. Расположенный под потенциометром SENS потенциометр GROUND, отвечает, как вы уже догадались, за настройку металлоискателя на грунт. Можно воспользоваться отметкой 5 на шкале, чтобы начать быстрый поиск, а можно «заточить» металлоискатель на самый глубинный поиск, воспользовавшись ручной настройкой баланса грунта. Для точной настройки на грунт можно использовать два способа, подробно описанных в инструкции к детектору, скажем лишь, что один из них производится в режиме статического определения центра цели, а другой – в режиме все металлы.
Расположенный под потенциометром SENS потенциометр GROUND, отвечает, как вы уже догадались, за настройку металлоискателя на грунт. Можно воспользоваться отметкой 5 на шкале, чтобы начать быстрый поиск, а можно «заточить» металлоискатель на самый глубинный поиск, воспользовавшись ручной настройкой баланса грунта. Для точной настройки на грунт можно использовать два способа, подробно описанных в инструкции к детектору, скажем лишь, что один из них производится в режиме статического определения центра цели, а другой – в режиме все металлы.
В середине панели управления расположилась сенсорная кнопка PINPOINT, нажатие на которую переводит металлоискатель в статический режим все металлы, и по интенсивности сигнала можно судить о приближении предмета к катушке и ее центру. Настроить FISHER CZ21-10 не представляет труда, после чего вы получаете полный доступ к сокровищам, спрятавшимся на дне морском, или в любом другом месте – по вашему усмотрению. Высокая чувствительность к золотым самородкам и возможность активного противодействия сильно минерализованной почве делает этот детектор востребованным не только поисковиками-дайверами, но и золотодобытчиками. Простота настройки, легкость управления, применение двухчастотной технологии и особой системы обработки сигнала позволяют сделать поиск производительным, а время, затрачиваемое на идентификацию каждой цели минимальным. FISHER CZ21-10 это настоящий профессиональный прибор для тех, кто хочет попробовать себя в подводном поиске или поиске древних артефактов. Надежный, экономичный прибор для глубокого поиска – все это FISHER CZ21-10!
Простота настройки, легкость управления, применение двухчастотной технологии и особой системы обработки сигнала позволяют сделать поиск производительным, а время, затрачиваемое на идентификацию каждой цели минимальным. FISHER CZ21-10 это настоящий профессиональный прибор для тех, кто хочет попробовать себя в подводном поиске или поиске древних артефактов. Надежный, экономичный прибор для глубокого поиска – все это FISHER CZ21-10!
Обмен металлодетектора, поменять старый металлоискатель на новый, трейд-ин, trade-in, обмен, замена металлоискателя
Кладоискательство — увлечение интересное и заманчивое, но далеко не самое дешёвое. И всегда наступает момент, когда хочется свой первый и «простой» металоискатель заменить на более функциональный и мощный.
В таких случаях всегда встаёт вопрос — что делать со старым и где взять деньги на новый детектор?
Можно попробовать продать старый и, добавив немного денег, купить новый. Но если Вы не знаете как, где и, главное, быстрее и проще это сделать, то потратите много нервов, сил и времени впустую.
Но если Вы не знаете как, где и, главное, быстрее и проще это сделать, то потратите много нервов, сил и времени впустую.
К счастью!
Для таких случаев в наших магазинах действует система Trade In — обмен старого металлоискателя на новый с небольшой доплатой.
Как воспользоваться системой Trade-In?
Схема проста:
- Вы приносите или присылаете ваш металлоискатель к нам в офис (чтоб не ездить лишний раз можно прислать фотографии по электронной почте), при необходимости получаете консультацию о новом желаемом вами приборе;
- Мы оцениваем его и в случае, если сумма вас устраивает, оставляете Ваш прибор в счёт стоимости нового (также возможен зачёт вашего старого прибора как первого взноса при рассрочке или кредите).

Фактически получается, что Вы покупаете новый прибор, отдавая при этом часть суммы вашим старым металлоискателем.
Самым важным преимуществом нашей компании является то, что Вам нет совершенно никакой необходимости ждать продажи вашего старого металлоискателя. Вы сможете наслаждаться работой с новым детектором уже сразу после обмена!
Тратить время и ломать голову над дальнейшей судьбой Вашего старого прибора теперь будем мы!
Критерии оценки металлоискателя:
- внешний вид сдаваемого прибора
- наличие гарантии
- комплектация
- рабочее состояние
Процесс обмена происходит в офисе продаж, в максимально сжатые сроки.
В случае, когда Вы присылаете фотографии прибора, окончательная сумма оценки будет известна только после того, как прибор окажется у нас в офисе.
Приведём простой пример:
Вы счастливый обладатель прибора Minelab X-TERRA 305.
Отличный прибор за свои деньги, но Вы уже чувствуете, что научились с ним всему, чему он способен научить и уже исчерпал себя. Есть желание искать глубже, копать меньше мусора, разнообразить свои находки более мелкими, вам мешают ложные срабатывания от минерализации грунта.
Ваш выбор пал на Minelab VANQUISH 540 Pro-Pack — богатая комплектация, мультичастотность, беспроводные наушники, легкий и т.д.
Приносите нам ваш X-TERRA 305 и, немного доплатив, уходите с долгожданным Minelab VANQUISH 540 Pro-Pack.
В дополнение ко всему получаете дисконтную карту со скидкой на все последующие покупки! А если у Вас она уже есть, то обмен для Вас станет еще более выгодным.Найди свой клад!
Система COMRADE для автономного обнаружения наземных мин с использованием нескольких роботов в постконфликтных регионах
Мы рассматриваем задачу автономного обнаружения наземных мин с помощью группы мобильных роботов.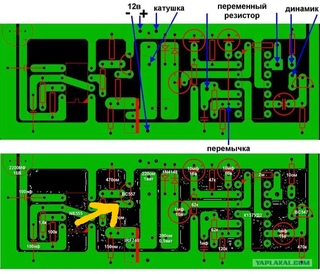 В предыдущих исследованиях роботизированного обнаружения наземных мин в основном использовался один робот, оснащенный датчиком обнаружения наземных мин для обнаружения наземных мин. Мы предполагаем, что качество обнаружения наземных мин может быть значительно улучшено, если несколько роботов скоординированы для совместного обнаружения наземных мин путем постепенного объединения собранной ими информации датчиков, связанных с наземными минами, а затем использовать эту информацию для посещения мест потенциальных наземных мин.Для достижения этой цели мы описываем систему мультироботов под названием COMRADES для решения различных аспектов проблемы автономного обнаружения наземных мин, включая распределенную зону покрытия для обнаружения и определения местоположения наземных мин, агрегацию информации для объединения сенсорной информации, полученной разными роботами, и распределение задач мультироботов (MRTA) чтобы позволить различным роботам определять подходящую последовательность посещения мест потенциальных мин, сокращая при этом необходимое время и расход батареи.
В предыдущих исследованиях роботизированного обнаружения наземных мин в основном использовался один робот, оснащенный датчиком обнаружения наземных мин для обнаружения наземных мин. Мы предполагаем, что качество обнаружения наземных мин может быть значительно улучшено, если несколько роботов скоординированы для совместного обнаружения наземных мин путем постепенного объединения собранной ими информации датчиков, связанных с наземными минами, а затем использовать эту информацию для посещения мест потенциальных наземных мин.Для достижения этой цели мы описываем систему мультироботов под названием COMRADES для решения различных аспектов проблемы автономного обнаружения наземных мин, включая распределенную зону покрытия для обнаружения и определения местоположения наземных мин, агрегацию информации для объединения сенсорной информации, полученной разными роботами, и распределение задач мультироботов (MRTA) чтобы позволить различным роботам определять подходящую последовательность посещения мест потенциальных мин, сокращая при этом необходимое время и расход батареи.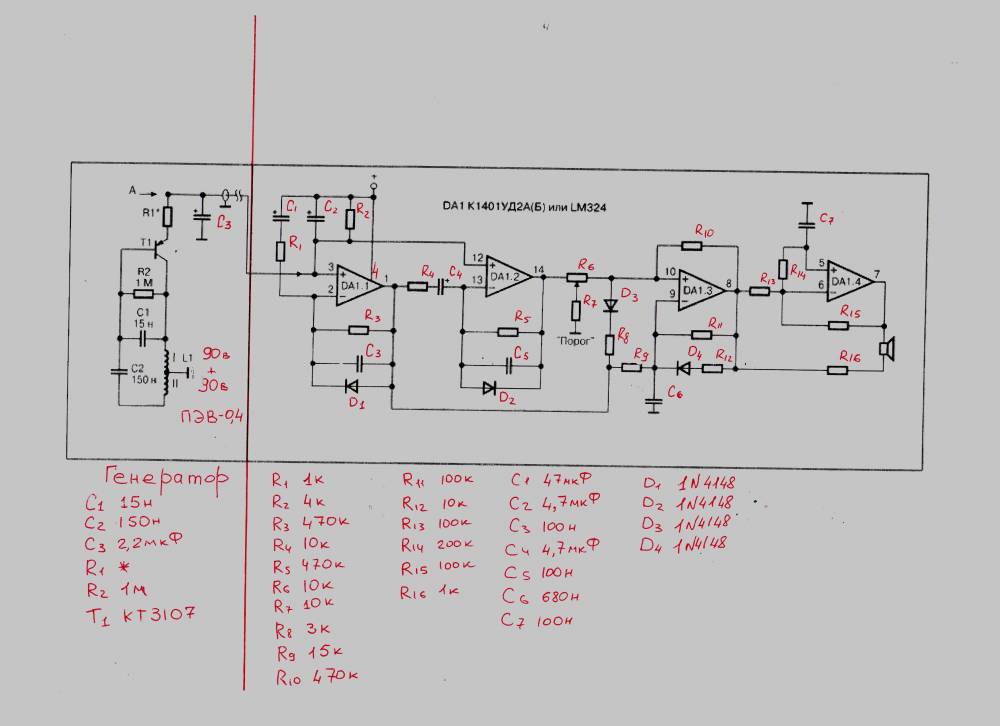 Мы использовали коммерчески доступных вездеходных роботов под названием Coroware Explorer, которые настроены с помощью металлоискателя для обнаружения металлических объектов, включая наземные мины, а также внутренних роботов Corobot, как в моделировании, так и в физических экспериментах, чтобы протестировать различные методы в COMRADES.
Мы использовали коммерчески доступных вездеходных роботов под названием Coroware Explorer, которые настроены с помощью металлоискателя для обнаружения металлических объектов, включая наземные мины, а также внутренних роботов Corobot, как в моделировании, так и в физических экспериментах, чтобы протестировать различные методы в COMRADES.
1. Введение
Гуманитарное разминирование — важнейшая задача для обеспечения безопасности и жизнеобеспечения людей в постконфликтных регионах. К сожалению, недавние исследования по мониторингу наземных мин показывают, что усилия по гуманитарному разминированию значительно отстают от мероприятий по установке противопехотных мин по ряду технологических и экономических причин [1]. Это приводит к огромным человеческим жертвам; например, только в 2010 году взрывы мин и аналогичных устройств привели к человеческим жертвам, жертвами стали мирные жители.Одной из основных технологических проблем в гуманитарном разминировании является быстрое и с разумной точностью обнаружение наземных мин при одновременном сокращении количества ложных срабатываний.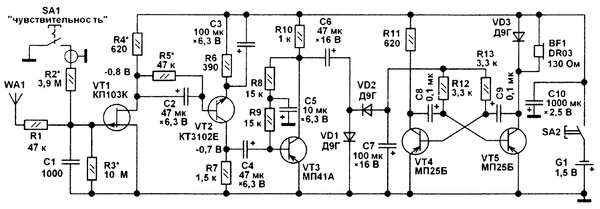 Мы предполагаем, что автоматизация операций по обнаружению наземных мин с использованием нескольких стандартных автономных роботов обеспечит достаточно точное, но экономичное решение проблемы обнаружения наземных мин. Для достижения этой цели мы описываем систему мультироботов, называемую COMRADE (Cooperative Multirobot Automated Detection), для гуманитарного разминирования.Основная цель COMRADES — разработать новые методы координации между несколькими недорогими мобильными роботами, которые позволяют им автономно и совместно обнаруживать наземные мины с высокой точностью в постконфликтных регионах. COMRADES включает в себя методы, которые позволяют каждому роботу исследовать изначально неизвестный регион при поиске мин, распознавать объекты, похожие на наземные мины на своих датчиках, делиться и объединять информацию датчиков, связанных с наземными минами, с другими роботами и координировать свои действия с другими роботами, чтобы несколько роботов могут собраться на объекте, чтобы проанализировать его и подтвердить, что это мина.
Мы предполагаем, что автоматизация операций по обнаружению наземных мин с использованием нескольких стандартных автономных роботов обеспечит достаточно точное, но экономичное решение проблемы обнаружения наземных мин. Для достижения этой цели мы описываем систему мультироботов, называемую COMRADE (Cooperative Multirobot Automated Detection), для гуманитарного разминирования.Основная цель COMRADES — разработать новые методы координации между несколькими недорогими мобильными роботами, которые позволяют им автономно и совместно обнаруживать наземные мины с высокой точностью в постконфликтных регионах. COMRADES включает в себя методы, которые позволяют каждому роботу исследовать изначально неизвестный регион при поиске мин, распознавать объекты, похожие на наземные мины на своих датчиках, делиться и объединять информацию датчиков, связанных с наземными минами, с другими роботами и координировать свои действия с другими роботами, чтобы несколько роботов могут собраться на объекте, чтобы проанализировать его и подтвердить, что это мина. В этой статье мы представляем описание и экспериментальные результаты различных методов охвата, распределения задач, агрегации мультисенсорной информации и планирования сенсоров с использованием нескольких роботов, которые мы разработали как часть COMRADES. В частности, мы описываем следующие аспекты автономного обнаружения наземных мин несколькими роботами в COMRADES. (I) Метод охвата распределенной зоны позволяет набору роботов динамически разделять первоначально неизвестную среду на набор неперекрывающихся регионов и искать наземные мины в каждом регионе.Эти методы устойчивы к сбоям отдельных роботов и могут масштабироваться в зависимости от количества роботов и размера окружающей среды. (Ii) Метод слияния распределенной информации объединяет информацию датчиков, связанных с наземными минами, от различных роботов с использованием рыночной техники прогнозирования и метод принятия решений, который использует объединенную информацию для выделения дополнительных роботов (датчиков) для быстрой классификации объекта.
В этой статье мы представляем описание и экспериментальные результаты различных методов охвата, распределения задач, агрегации мультисенсорной информации и планирования сенсоров с использованием нескольких роботов, которые мы разработали как часть COMRADES. В частности, мы описываем следующие аспекты автономного обнаружения наземных мин несколькими роботами в COMRADES. (I) Метод охвата распределенной зоны позволяет набору роботов динамически разделять первоначально неизвестную среду на набор неперекрывающихся регионов и искать наземные мины в каждом регионе.Эти методы устойчивы к сбоям отдельных роботов и могут масштабироваться в зависимости от количества роботов и размера окружающей среды. (Ii) Метод слияния распределенной информации объединяет информацию датчиков, связанных с наземными минами, от различных роботов с использованием рыночной техники прогнозирования и метод принятия решений, который использует объединенную информацию для выделения дополнительных роботов (датчиков) для быстрой классификации объекта. (iii) Метод распределения задач для нескольких роботов (MRTA) использует модель пространственной организации очередей, которая позволяет набору роботов определять подходящий порядок или выполнять комплекс задач, связанных с обнаружением наземных мин, при одновременном сокращении времени и энергии, затрачиваемых на выполнение этих задач.Чтобы реализовать вышеупомянутые методы, мы настроили коммерчески доступных вездеходных роботов под названием Coroware Explorer с металлоискателем, чтобы они могли обнаруживать металлические объекты, включая наземные мины. Мы также разработали пользовательский интерфейс, который обеспечивает общую автономию между роботами и людьми. Люди могут визуализировать информацию о здоровье и статусе роботов и их прогрессе в операции по обнаружению наземных мин на станции управления и выборочно заменять свои автономные операции, дистанционно управляя движением и некоторыми операциями роботов.Мы проверили работу роботов на разных типах открытой местности и в разных условиях эксплуатации.
(iii) Метод распределения задач для нескольких роботов (MRTA) использует модель пространственной организации очередей, которая позволяет набору роботов определять подходящий порядок или выполнять комплекс задач, связанных с обнаружением наземных мин, при одновременном сокращении времени и энергии, затрачиваемых на выполнение этих задач.Чтобы реализовать вышеупомянутые методы, мы настроили коммерчески доступных вездеходных роботов под названием Coroware Explorer с металлоискателем, чтобы они могли обнаруживать металлические объекты, включая наземные мины. Мы также разработали пользовательский интерфейс, который обеспечивает общую автономию между роботами и людьми. Люди могут визуализировать информацию о здоровье и статусе роботов и их прогрессе в операции по обнаружению наземных мин на станции управления и выборочно заменять свои автономные операции, дистанционно управляя движением и некоторыми операциями роботов.Мы проверили работу роботов на разных типах открытой местности и в разных условиях эксплуатации. Мы также использовали комнатных роботов, называемых Coroware Corobots, которые имеют очень похожие функции с уличными роботами Explorer, как в моделировании, так и на внутренней арене, чтобы протестировать различные методы, используемые в COMRADES. Наши результаты показывают, что предлагаемые нами методы предлагают подходящие средства для быстрого автономного обнаружения наземных мин с помощью недорогих роботов.
Мы также использовали комнатных роботов, называемых Coroware Corobots, которые имеют очень похожие функции с уличными роботами Explorer, как в моделировании, так и на внутренней арене, чтобы протестировать различные методы, используемые в COMRADES. Наши результаты показывают, что предлагаемые нами методы предлагают подходящие средства для быстрого автономного обнаружения наземных мин с помощью недорогих роботов.
Остальная часть нашей статьи построена следующим образом.В следующем разделе мы даем обзор существующих исследований по роботизированному обнаружению наземных мин. В Разделе 3 мы описываем основные особенности предлагаемой нами системы, используемых роботов и детектор наземных мин, а также пользовательский интерфейс. Конкретные алгоритмы, методы и результаты, относящиеся к трем основным техническим аспектам COMRADES, охвату распределенной области, распределению задач и объединению информации, рассматриваются в разделе 4, и, наконец, мы обсуждаем будущие направления нашей работы и делаем выводы.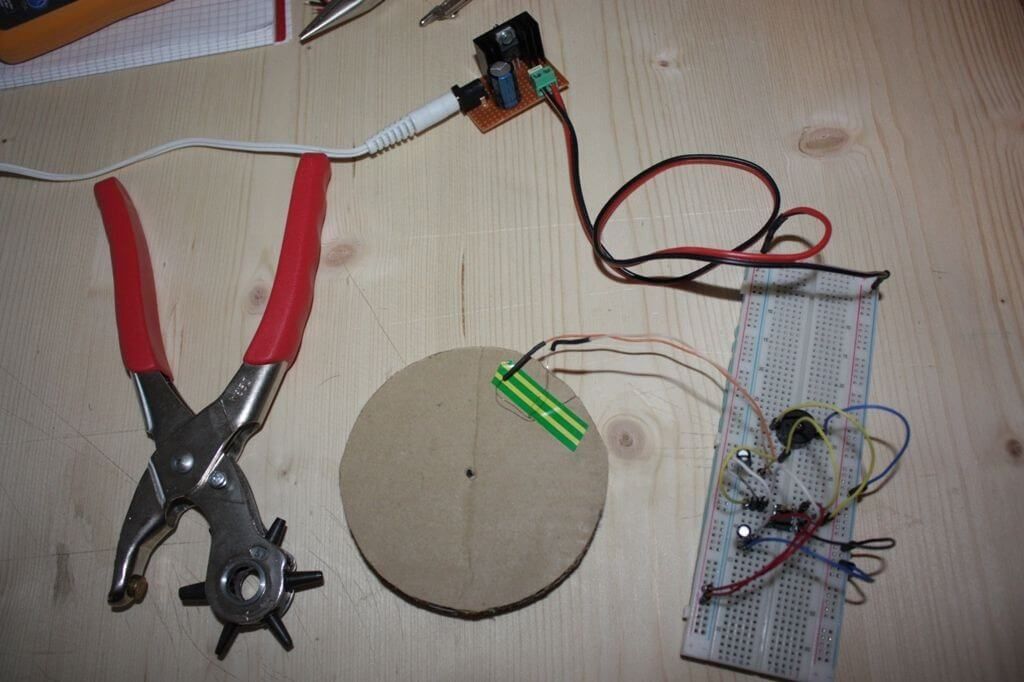
2. Сопутствующие работы
Автономное обнаружение мин с использованием роботизированных систем было активной темой исследований в последнее десятилетие. Превосходные обзоры современных методов роботизированного обнаружения наземных мин доступны в [2, 3]. Исследования по этой теме можно разделить на три основных направления: проектирование роботов с соответствующими сенсорными устройствами для обнаружения и возможного извлечения наземных мин, разработка методов объединения данных и информации для повышения точности обнаружения наземных мин, а также вычислительные методы для координации нескольких роботов и представления информации. информация, собранная роботами, в структурированном и визуализируемом формате для человека-руководителя.
Большая часть недавних исследований автономного обнаружения наземных мин была сосредоточена на разработке роботизированных систем для обнаружения наземных мин; большинство этих систем состоит из одного робота, к которому прикреплены соответствующие датчики для обнаружения наземных мин.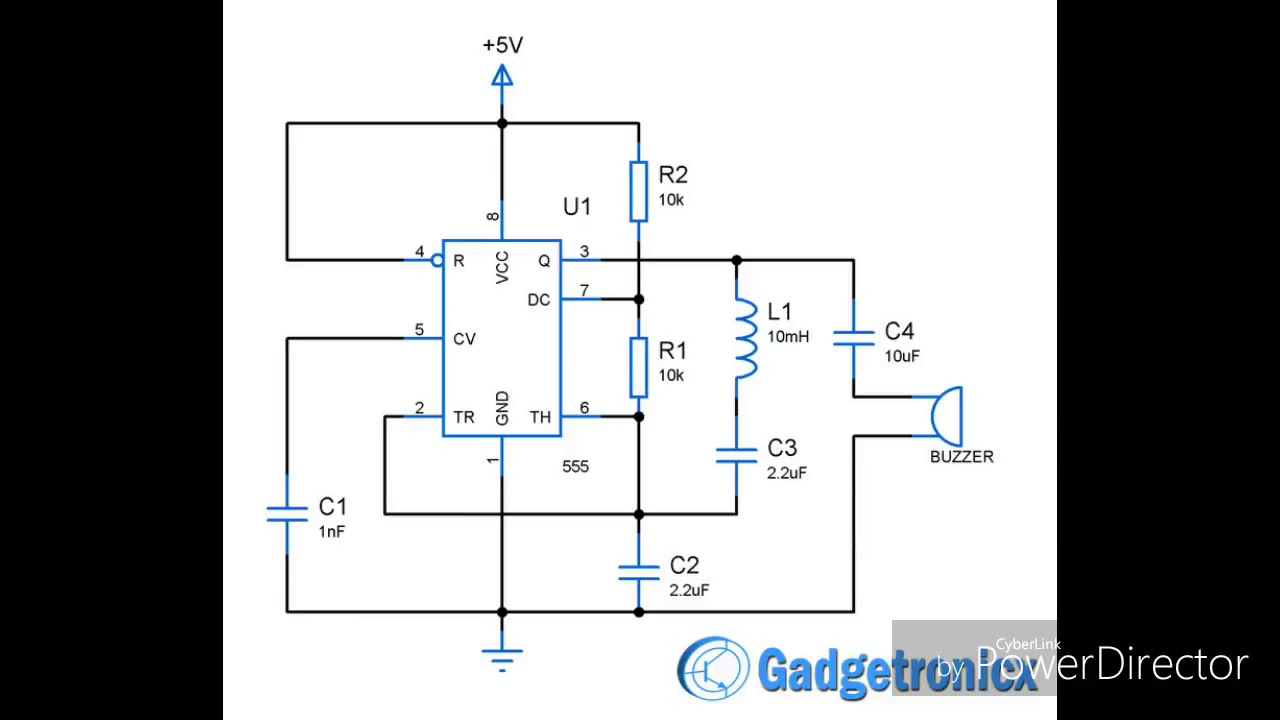 Например, некоторые из этих роботов включают в себя механизм, установленный на небольших роботизированных платформах, чтобы взрывать землю и взрывать мины вместе с инструментами для очистки растительности [4]. Многие развернутые роботизированные системы для обнаружения наземных мин полагаются на дистанционное управление, а не на автономность.Примеры таких систем включают дистанционно управляемое транспортное средство под названием MR-, усовершенствованную дистанционно управляемую систему обезвреживания боеприпасов (ETODS) и робота TEMPEST. Эти роботы извлекают выгоду из повышенной точности обнаружения и нейтрализации наземных мин из-за присутствия человека в контуре, но они требуют, чтобы люди находились поблизости от наземных мин для дистанционного управления транспортным средством. Более поздние усовершенствования некоторых из этих систем, таких как MR-, добавили частичную автономию в навигации и увеличили дальность дистанционного управления до км с использованием датчиков обратной связи.
Например, некоторые из этих роботов включают в себя механизм, установленный на небольших роботизированных платформах, чтобы взрывать землю и взрывать мины вместе с инструментами для очистки растительности [4]. Многие развернутые роботизированные системы для обнаружения наземных мин полагаются на дистанционное управление, а не на автономность.Примеры таких систем включают дистанционно управляемое транспортное средство под названием MR-, усовершенствованную дистанционно управляемую систему обезвреживания боеприпасов (ETODS) и робота TEMPEST. Эти роботы извлекают выгоду из повышенной точности обнаружения и нейтрализации наземных мин из-за присутствия человека в контуре, но они требуют, чтобы люди находились поблизости от наземных мин для дистанционного управления транспортным средством. Более поздние усовершенствования некоторых из этих систем, таких как MR-, добавили частичную автономию в навигации и увеличили дальность дистанционного управления до км с использованием датчиков обратной связи. В отличие от этих более крупных роботов, исследователи также исследовали более мелких роботов, которые обладают высокой маневренностью, небольшими размерами и малым весом, чтобы снизить риск случайного взрыва мины. Примерами таких роботов являются роботы Ares, Shrimps, Pemexs, Dervishs и Tridem, а также роботы на ногах, такие как AMRU, Shadow Deminer и COMET [3]. Несмотря на свою маневренность, меньшие роботы имеют ограниченный вес датчиков, которые они могут носить на борту, и не подходят для более тяжелых и надежных датчиков, таких как георадар или металлоискатели с большой катушкой.Для размещения таких датчиков были разработаны такие роботы, как Titan [5], Gryphon [6], робот для обнаружения мин и машина для поиска мин (MHV) [3]. Большинство рассмотренных выше роботов предназначены для обнаружения и обнаружения наземных мин. Напротив, робот PEACE [7] и механическая рука под названием Minehand [6] были разработаны в основном для раскопок обнаруженных наземных мин. Исследователи также предложили беспилотные летательные аппараты (БПЛА) в роботизированных системах обнаружения наземных мин для помощи в картографировании местности перед развертыванием наземных роботов [2] или для незаметного обнаружения наземных мин с использованием концептуальной системы датчиков, прикрепленных к кабелям, подвешенным к БПЛА [8].
В отличие от этих более крупных роботов, исследователи также исследовали более мелких роботов, которые обладают высокой маневренностью, небольшими размерами и малым весом, чтобы снизить риск случайного взрыва мины. Примерами таких роботов являются роботы Ares, Shrimps, Pemexs, Dervishs и Tridem, а также роботы на ногах, такие как AMRU, Shadow Deminer и COMET [3]. Несмотря на свою маневренность, меньшие роботы имеют ограниченный вес датчиков, которые они могут носить на борту, и не подходят для более тяжелых и надежных датчиков, таких как георадар или металлоискатели с большой катушкой.Для размещения таких датчиков были разработаны такие роботы, как Titan [5], Gryphon [6], робот для обнаружения мин и машина для поиска мин (MHV) [3]. Большинство рассмотренных выше роботов предназначены для обнаружения и обнаружения наземных мин. Напротив, робот PEACE [7] и механическая рука под названием Minehand [6] были разработаны в основном для раскопок обнаруженных наземных мин. Исследователи также предложили беспилотные летательные аппараты (БПЛА) в роботизированных системах обнаружения наземных мин для помощи в картографировании местности перед развертыванием наземных роботов [2] или для незаметного обнаружения наземных мин с использованием концептуальной системы датчиков, прикрепленных к кабелям, подвешенным к БПЛА [8].
Для обнаружения наземных мин используется широкий спектр датчиков, включая металлодетекторы (MD) [9], георадар (GPR) [10, 11], инфракрасные камеры [12] и химические датчики для обнаружения шлейфов, исходящих от наземных мин [13] ] Были предложены. Для большинства исследований, а также для коммерческих приложений, металлодетекторы, по отдельности или в сочетании с георадаром [6, 14], являются предпочтительными датчиками, поскольку они обеспечивают достаточно точную локализацию источника и относительно просты для обнаружения вне сети. полочные компоненты и интегрируются в роботов.По этой причине мы использовали металлоискатели на роботах для обнаружения мин в нашей системе.
Еще одним важным аспектом обнаружения наземных мин является объединение показаний датчиков, полученных несколькими датчиками. Проект Joint Multisensor Mine-Signatures был одним из первых исследовательских проектов по сбору данных обнаружения наземных мин с использованием нескольких датчиков [15]. Bloch et al. [16] предложили несколько методов слияния датчиков, основанных на теории Демпстера-Шафера, включая методы включения значений достоверности человека в данные, собранные датчиками [17].Мультисенсорный робот для разминирования, состоящий из металлоискателя, инфракрасного сенсора и химического сенсора, описан в [18]. В [11] авторы сообщают, что методы байесовского вывода для объединения данных с использованием нескольких датчиков, металлоискателя, георадара, инфракрасной камеры и магнитометра могут значительно повысить скорость обнаружения наземных мин. Усовершенствованная система визуализации наземных мин (ALIS) использует сигнатуры металлоискателей и георадара для более точного обнаружения глубоких шахт, хотя датчики управляются вручную, и их сигнатуры также проверяются вручную.Эта идея была расширена до роботизированного обнаружения наземных мин путем сбора данных с массива металлоискателей и георадара, установленных на одном роботе, и использования комбинации байесовских алгоритмов логического вывода и кластеризации в зависимости от контекста собранных данных для повышения скорости обнаружения наземных мин. [19]. Во всем мире несколько недавних проектов по гуманитарному разминированию с использованием роботов также используют несколько датчиков для более точного обнаружения наземных мин. Текущий проект TIRAMISU в Европейском Союзе [20] предлагает использовать методы слияния мультисенсорных данных для объединения информации от металлоискателя и химического датчика [21], чтобы улучшить местоположение и точность обнаружения наземных мин.В [22] авторы описывают полевые испытания с системами ALIS и Gryphon с использованием только металлоискателей и металлоискателей вместе с георадаром, для наземных мин, заложенных в различных типах почвы на испытательных минных полях в Хорватии. Аналогичным образом в [23] автор описывает механическую систему, оснащенную ядерными детекторами для измерения гамма-излучения и обратных тепловых нейтронов, которую планируется развернуть в Ливии. Проблемы, о которых сообщалось в этих проектах, включают точное определение глубины залегания наземной мины и снижение частоты ложных срабатываний с учетом вероятности обнаружения датчика, используемого для обнаружения наземной мины.Состав почвы и беспорядок в ней также являются важными факторами, влияющими на точность обнаружения наземных мин [22].
[16] предложили несколько методов слияния датчиков, основанных на теории Демпстера-Шафера, включая методы включения значений достоверности человека в данные, собранные датчиками [17].Мультисенсорный робот для разминирования, состоящий из металлоискателя, инфракрасного сенсора и химического сенсора, описан в [18]. В [11] авторы сообщают, что методы байесовского вывода для объединения данных с использованием нескольких датчиков, металлоискателя, георадара, инфракрасной камеры и магнитометра могут значительно повысить скорость обнаружения наземных мин. Усовершенствованная система визуализации наземных мин (ALIS) использует сигнатуры металлоискателей и георадара для более точного обнаружения глубоких шахт, хотя датчики управляются вручную, и их сигнатуры также проверяются вручную.Эта идея была расширена до роботизированного обнаружения наземных мин путем сбора данных с массива металлоискателей и георадара, установленных на одном роботе, и использования комбинации байесовских алгоритмов логического вывода и кластеризации в зависимости от контекста собранных данных для повышения скорости обнаружения наземных мин. [19]. Во всем мире несколько недавних проектов по гуманитарному разминированию с использованием роботов также используют несколько датчиков для более точного обнаружения наземных мин. Текущий проект TIRAMISU в Европейском Союзе [20] предлагает использовать методы слияния мультисенсорных данных для объединения информации от металлоискателя и химического датчика [21], чтобы улучшить местоположение и точность обнаружения наземных мин.В [22] авторы описывают полевые испытания с системами ALIS и Gryphon с использованием только металлоискателей и металлоискателей вместе с георадаром, для наземных мин, заложенных в различных типах почвы на испытательных минных полях в Хорватии. Аналогичным образом в [23] автор описывает механическую систему, оснащенную ядерными детекторами для измерения гамма-излучения и обратных тепловых нейтронов, которую планируется развернуть в Ливии. Проблемы, о которых сообщалось в этих проектах, включают точное определение глубины залегания наземной мины и снижение частоты ложных срабатываний с учетом вероятности обнаружения датчика, используемого для обнаружения наземной мины.Состав почвы и беспорядок в ней также являются важными факторами, влияющими на точность обнаружения наземных мин [22].
Недавно некоторые исследователи предложили использовать системы мультироботов для обнаружения мин [22, 24, 25]. Явным преимуществом, предоставляемым несколькими роботами, является возможность включать датчики разных типов на разные платформы роботов и делать систему устойчивой к сбоям одного или нескольких роботов. В этом направлении в распределенной архитектуре полевого робота (DFRA) [25] была предложена программная среда для согласованной работы воздушного и колесного наземного робота с визуальными и тепловыми датчиками для обнаружения мин, а в [24] авторы включили колесный , ножные и воздушные роботы, использующие комбинацию георадара, металлоискателей и датчиков пара для обнаружения наземных мин.Обе эти работы упоминаются как предварительные исследования и в основном сосредоточены на подходящей программной архитектуре для интеграции нескольких роботов в единую систему обнаружения наземных мин. Наша работа в этой статье в основном идет в этом направлении координации нескольких роботов для обнаружения наземных мин с упором на конкретные методы и алгоритмы, которые могут использоваться роботами для выполнения различных аспектов автономного обнаружения наземных мин.
3. Описание системы COMRADE
Основной целью системы COMRADE (COoperative Multi-Robot Automated DEtection) для гуманитарного разминирования является разработка новых методов координации между несколькими недорогими автономными мобильными роботами, которые позволяют им совместно обнаруживать наземные мины в постконфликтных регионах.Роботы, используемые в системе COMRADE, представляют собой стандартные, относительно недорогие автономные роботы, оснащенные соответствующими датчиками для обнаружения мин. Мы рассматриваем три основных кандидата на роль датчиков: металлоискатели (МД), мультилокаторное устройство на основе ИК-излучения и георадар. Стоимость, точность и возможности различных датчиков приведены в таблице 1. Из-за различий между датчиками по этим трем факторам важно размещать датчики в регионе, учитывая возможность наличия наземных мин и рисков для человека. живет в этом регионе.Например, в областях с низким уровнем риска и низкой вероятностью можно развернуть больше роботов с датчиками низкой стоимости / низкой точности (например, только MD) с помощью слабо скоординированных команд роботов, которые предлагают очень грубые гарантии времени, необходимого для подтверждения обнаруженного объекта. как мина. С другой стороны, в зоне с высоким риском и высокой степенью поражения имело бы смысл включить более точные и более дорогие датчики, используя тесно связанные команды роботов, чтобы можно было быстро подтвердить потенциальную наземную мину. Для достижения этого в системе COMRADE область интересов (AOI) классифицируется экспертами-людьми на подрайоны на основе вероятности попадания наземных мин и рисков для жизни человека, и роботы с соответствующими датчиками размещаются в каждом подрайоне.Пример классификации AOI приведен в Таблице 2, а диаграмма, показывающая развертывание команд роботов на основе классификации AOI, показана на Рисунке 1. Как показано на Рисунке 1, для зон высокого риска весь AOI покрывается с использованием всех типы датчиков. Для зон со средней степенью риска в качестве компромисса между затратами на обнаружение наземных мин (время и энергия, затрачиваемые на обнаружение) и точностью датчики с более высокой точностью развертываются в определенном месте только тогда, когда датчик с более низкой точностью обнаруживает подозрительный объект в этом месте.Если требуется обнаружение, весь AOI можно классифицировать как зону повышенного риска, чтобы гарантировать, что он хотя бы один раз покрывается каждым датчиком. Для наглядности в остальной части документа мы ссылаемся на подобласть, в которой развернута команда роботов, как на их среду, и рассматриваем алгоритмы для координации роботов, которые находятся только в этой подобласти.
| |||||||||||||||||||||
| ||||||||||||||||||
Мы рассматриваем изначально неизвестную среду, границы которой известны, но местоположения препятствий в этой среде изначально неизвестны или известны с неточностями.Окружающая среда содержит как наземные мины, так и объекты, не являющиеся наземными минами, которые закопаны под землей и могут быть обнаружены датчиками обнаружения наземных мин на роботах. Эти объекты вместе называются объектами интереса, и их местонахождение неизвестно априори . Когда робот находится поблизости от интересующего объекта, мы предполагаем, что робот расположен надлежащим образом, так что сигнатуру объекта можно зарегистрировать на его датчике обнаружения. Мы ссылаемся на операции, выполняемые роботом для определения сигнатуры интересующего объекта под землей, используя его датчик обнаружения наземных мин как задачу.Задача роботов — искать наземные мины с помощью датчиков обнаружения наземных мин. Когда интересующий объект обнаруживается датчиком робота, он вызывает других роботов в то место, где был обнаружен объект, для анализа сигнатуры объекта с помощью датчиков других роботов. Наконец, данные, собранные роботами с интересующего объекта, должны быть объединены, чтобы объект можно было классифицировать как противопехотную или не являющуюся наземной миной. Для реализации этих действий роботы в COMRADES должны выполнять три основные функции.Распределенно покрывайте свободное пространство в среде для поиска интересующих объектов. Для каждого робота определите расписание или порядок выполнения задач, о которых он знает, чтобы снизить стоимость общего расписания с точки зрения энергии, затрачиваемой роботами. Набор задач может динамически меняться по мере обнаружения роботами новых интересных объектов. Объедините информацию об интересующем объекте, полученную разными роботами, чтобы классифицировать его как наземную или не наземную мину. Алгоритмы реализации этих функций в COMRADES описаны в Разделе 4.
3.1. COMRADES Robots
Мы использовали двух роботов, названных Explorer и Corobot, производства Coroware Inc. Оба робота четырехколесные и для маневрирования используют бортовой механизм. Робот Explorer имеет прочную конструкцию с большим клиренсом и подходит для навигации на открытом воздухе по пересеченной местности, в то время как робот Corobot представляет собой более легкую, уменьшенную версию робота Explorer и больше подходит для использования в помещении и в целях тестирования. Фотографии роботов Explorer и Corobot, используемых в COMRADES, показаны на рисунке 2.Каждый робот оснащен бортовым компьютером, двухъядерным процессором AMD Athlon, работающим на частоте ГГц с ГБ ОЗУ под Windows XP. Бортовые датчики обоих роботов включают в себя цветную веб-камеру VGA с разрешением MP, Wi-Fi для связи со станцией управления и лазерный дальномер Hokuyo URG-04LX-UG01 с дальностью обнаружения от см до м и углом обзора .
Робот Corobot оснащен устройством определения местоположения Hagisonic Stargazer, которое использует ИК-позиционирование с использованием верхних маркеров для определения местоположения и направления робота с точностью ± 2 см.Чтобы избежать препятствий в непосредственной близости, робот Corobot также оснащен двумя поперечными ИК-датчиками, установленными на переднем бампере, по одному ИК-датчику с каждой стороны, ориентированным на шестьдесят градусов от передней части транспортного средства; ИК-датчики обеспечивают измерение расстояния в диапазоне 10–80 см. Что касается роботов Corobot, мы использовали их веб-камеры для обнаружения определенных объектов или меток на земле, соответствующих виртуальным наземным минам, из-за сложностей при использовании детекторов наземных мин, таких как металлодетекторы, в помещениях (например.г., внутри зданий с металлическими каркасами).
Дополнительные бортовые датчики робота Explorer включают инерциальный измерительный блок (IMU) и дифференциальный GPS-модуль Garmin GPS16x LVS, обеспечивающий определение местоположения с точностью ± 3 м. Чтобы локализовать робота, использовалась методика фильтрации Калмана для объединения показаний GPS, IMU и кодировщика, в результате чего точность локализации составила ± 1 м. (Методы объединения данных о местоположении от нескольких датчиков [19] могут использоваться для дальнейшего повышения точности определения местоположения обнаруженных наземных мин.Роботы Explorer были также настроены с помощью металлоискателя, прикрепленного с помощью фиксированной руки к передней части робота, как показано на рисунке 2.
3.2. Система металлоискателя
Система металлоискателя (MD), используемая в COMRADES, состоит из металлоискателя Infinium LS производства Garrett Inc., прикрепленного к неподвижной, обращенной вперед руке робота Explorer. MD разработан для работы во влажных и сильно минерализованных средах. Устройство было настроено и интегрировано в робота Explorer через интерфейс USB для обнаружения наземных мин в различных средах, таких как трава, снег и каменистые поверхности, как показано на рисунке 3.В металлоискателе реализована технология импульсной индукции (PI), которая работает, посылая короткие (50 с), сильноточные (20 А) импульсы на поисковую катушку. Затем он прослушивает «эхо» от металлического объекта. Это эхо на самом деле является остаточным магнитным полем, индуцированным в объекте рядом с катушкой, и изменяет скорость затухания от естественного разрушения катушки. Если рядом с катушкой нет металла, импульс будет быстро и предсказуемо затухать. Когда металл находится рядом с катушкой, он распадается с другой скоростью, чем при естественном распаде.Разница между этими двумя временами указывает на присутствие металла. Скорость наклона кривой покажет, насколько силен сигнал от металла. Преимущество импульсной индукционной технологии перед другими сопоставимыми технологиями заключается в том, что на нее очень мало влияет минерализация почвы и воды, что означает, что ее можно использовать в более широком диапазоне типов почв и мест.
Для проверки работы МД был проведен простой эксперимент; мы использовали макет наземной мины с очень небольшим количеством металла в ее конструкции, показанной на Рисунке 4 (а).На рис. 4 (б) показана катушка металлоискателя, помещенная на фугас, когда она размещается на поверхности и под землей. На рисунках 4 (c) и 4 (d) показаны мощность сигнала от металлоискателя и ошибка стандартного отклонения, когда макет наземной мины размещается на разной глубине под землей в диапазоне от 0 до 100 мм, непосредственно под катушкой MD. Сила сигналов показывает, что используемый MD способен обнаруживать фугас и изолировать его от неметаллического материала, несмотря на его низкое содержание металла.
Контроллеры для набора низкоуровневых поведений, таких как уклонение от препятствий, блуждание или случайное блуждание, следование границам (как физическим, так и виртуальным границам) и предотвращение мин, были запрограммированы на C ++ для каждого робота. Это поведение используется для реализации более сложных скоординированных операций по охвату и распределению задач на нескольких роботах, которые описаны ниже.
3.3. Графический интерфейс пользователя
Графический интерфейс пользователя (GUI) был разработан с использованием Java для взаимодействия с группой физических роботов во время миссии коллективного обнаружения наземных мин.Основная цель графического интерфейса пользователя — визуализировать в режиме реального времени состояние миссии, включая положение и текущий статус роботов, доступную мощность их батарей и местоположение потенциальных мин, обнаруженных роботами, как показано на Рисунке 5 (a ). Оператор также может командовать роботами для выполнения определенных действий через графический интерфейс, например, прервать текущую операцию и перейти в определенное место в среде, вызвать роботов на базовую станцию, а также остановить и перезапустить роботов. На рисунке 5 (а) показан снимок эксперимента с двумя физическими роботами, развернутыми в помещении площадью квадратные метры, и соответствующее состояние графического интерфейса пользователя.Пути, по которым следуют роботы, динамически записываются и выделяются, а обнаруженные роботами объекты, похожие на наземные мины, отображаются в графическом интерфейсе пользователя красными точками.
Каждые две секунды каждый робот передает данные, такие как его поза и состояние батареи, на станцию управления. При обнаружении объекта, похожего на мину, робот отправляет предполагаемое положение такого объекта. В экспериментах в помещениях объекты, похожие на наземные мины, представлены красными листами бумаги, обнаруживаемыми камерой роботов. Связь между сервером роботов и графическим интерфейсом устанавливается через TCP-порты.Сервер роботов периодически обновляет состояние роботов в графическом интерфейсе. Каждый робот получает и передает данные на сервер роботов, расположенный на станции управления, через Wi-Fi, как показано на рисунке 5 (b). Видео, демонстрирующие работу COMRADES вместе с его графическим интерфейсом, доступны по адресу [26].
4. Методы планирования роботов в COMRADES
Методы планирования составляют центральную часть COMRADES, позволяя развернутым роботам автономно перемещаться и достигать объектов интересов (потенциальных мин), избегая при этом препятствий, а также других роботов.В COMRADES мы рассматриваем две категории планирования: планирование пути покрытия, чтобы гарантировать, что роботы покрывают все свободное пространство в окружающей среде, используя свои датчики обнаружения наземных мин во время поиска наземных мин, и планирование задач или распределение задач, чтобы определить порядок, в котором робот будет посещать локации, в которых объекты интересов были обнаружены другими роботами.
4.1. Распределенное покрытие местности в COMRADES
Методы планирования пути покрытия [27] позволяют роботам планировать свои пути так, чтобы они могли покрыть все свободное пространство своей среды, используя свои датчики покрытия.Распределенное покрытие с несколькими роботами дает несколько преимуществ по сравнению с использованием одного робота для выполнения покрытия, например сокращение времени на полное покрытие и повышенную устойчивость к сбоям одного или нескольких роботов. Однако сложная проблема в распределенном покрытии с участием нескольких роботов состоит в том, чтобы гарантировать, что разные роботы не препятствуют движению друг друга или роботы с одним и тем же набором датчиков многократно покрывают одну и ту же область, оставляя при этом части окружающей среды открытыми. Предыдущие подходы к распределенному покрытию с участием нескольких роботов предполагают, что среда разбивается на ячеистую или сетчатую структуру перед развертыванием роботов [28–31].Затем они используют методы обхода графа, чтобы полностью покрыть среду. Роботы отправляют друг другу сообщения с информацией о своем покрытии, чтобы гарантировать, что они покрывают непересекающиеся регионы. В нашем исследовании мы использовали разбиение Вороного [32], чтобы разделить свободное пространство в окружающей среде на непересекающиеся ячейки или области. Исходные позиции роботов используются в качестве сайтов для создания раздела. После разделения каждый робот отвечает за покрытие области Вороного, в которой он находится. Это устраняет накладные расходы, позволяющие избежать повторного покрытия и столкновений между роботами.Одна проблема с разделением Вороного заключается в том, что размер областей Вороного зависит от начального положения роботов, и плохое начальное пространственное распределение роботов (например, роботы, находящиеся очень близко друг к другу) может привести к непропорциональным областям. Чтобы облегчить эту ситуацию, мы предлагаем использовать простые стратегии рассредоточения [33] между роботами для достижения хорошо разнесенного начального пространственного распределения.
4.1.1. Алгоритм покрытия разделов Вороного (VPC)
Основным вкладом нашего исследования покрытия в COMRADES является алгоритм, называемый покрытием на основе разделов Вороного (VPC).Подробное описание алгоритма доступно в [34]; здесь мы даем обзор ключевых аспектов алгоритма. В алгоритме VPC каждый робот сначала разбивает среду на набор непересекающихся областей, заданных разбиением среды Вороного, используя начальные положения роботов [35, 36]. Роботы в соседних областях Вороного робота называются его соседями Вороного. В [37] мы описали полностью распределенную технику для вычисления раздела Вороного с использованием связи между набором роботов.Как только перегородки определены, каждый робот переходит к покрытию той области, в которой он находится. Для этого робот разбивает свободное пространство своей области, используя клеточную декомпозицию в виде сетки; каждая ячейка сетки соответствует четырехкратному размеру зоны покрытия робота (датчик обнаружения наземных мин).
Затем робот использует метод покрытия сотовой связи под названием Spanning Tree Coverage (STC) [38] для покрытия ячеек (хотя мы использовали STC для реализации нашего алгоритма, любой другой алгоритм покрытия с одним роботом может использоваться в сочетании с VPC) .Алгоритм STC позволяет роботу покрывать последовательные ячейки в направлении своего движения. Когда встречается препятствие, робот выбирает ранее непокрытую ячейку среди соседей своей текущей ячейки, одновременно проверяя соседей по часовой стрелке от своей текущей ячейки. Если свободная соседняя ячейка не найдена (например, робот находится в пещере), робот возвращается к предыдущей ячейке, из которой он прибыл в текущую ячейку. Алгоритм STC завершается, когда робот достигает своей начальной ячейки путем обратного отслеживания.Когда робот завершает покрытие своей области Вороного, он передает сообщение о завершении покрытия своим соседям по Вороному. Мы проверили работу алгоритма VPC с помощью роботов Corobot на симуляторе Webots. На рисунках 6 (a) и 6 (b) показаны снимки из моделирования с использованием роботов в среде без препятствий и с X-образным препятствием, соответственно; пути покрытия, по которым следуют разные роботы, отмечены цветными следами.
Алгоритм VPC также устойчив к сбоям одного или нескольких роботов.Для обеспечения устойчивости каждый робот периодически обменивается живыми сообщениями со своими соседями Вороного. Если обнаруживается неотвечающий сосед, который не завершил свое покрытие, он помечается как отказавший робот. Области Вороного пересчитываются при отбрасывании отказавшего робота, а соседи Вороного отказавшего робота затем переходят к покрытию своих новых областей Вороного после исключения уже покрытых частей в регионе. На рисунке 6 (c) показано, что когда робот с фиолетовым следом выходит из строя, один из его соседей по Вороному (робот с красным следом) берет на себя и завершает покрытие незавершенного участка Вороного.Этот процесс гарантирует, что вся среда будет охвачена, пока хотя бы один робот остается в рабочем состоянии. Мы также показали аналитически, что алгоритм VPC обеспечивает полное неперекрывающееся покрытие при условии, что алгоритм покрытия с одним роботом обеспечивает полное неперекрывающееся покрытие [34].
4.1.2. Алгоритм перераспределения покрытия
В COMRADES, поскольку среда изначально неизвестна, мы предполагаем, что роботы не осведомлены о местоположении и геометрии препятствий.Потенциальная проблема при использовании алгоритма VPC в таком сценарии заключается в том, что робот может обнаружить, что часть его области Вороного закрыта препятствиями, как показано на рисунке 7 (а). Затем робот должен использовать методы планирования пути, чтобы найти путь для достижения недоступных частей его области Вороного; такой метод планирования пути может включать сложные вычисления [27] и увеличивать потребности роботов во времени и энергии. Чтобы избежать чрезмерных затрат на планирование пути, мы исследовали подход, который адаптивно перераспределяет области, где покрытие затруднено препятствиями, и перераспределяет перераспределенные части другим роботам, которые могут завершить покрытие, как показано на рисунке 7 (b).
В основе нашего подхода к перераспределению лежит алгоритм, называемый перераспределением покрытия [39]. Основная идея этого алгоритма заключается в том, что даже если область Вороного, которую покрывает робот, отключается из-за препятствий, потому что свободное пространство связано, недоступная часть области должна примыкать хотя бы к одной из соседних областей и быть доступной. к роботу в этом регионе. Следовательно, у робота, выполняющего покрытие в соседней соседней области, может быть запрошено увеличить его охват недоступной частью отключенной области, как показано на рисунке 7 (b).При использовании алгоритма VPC, если робот определяет, что он не может достичь части своей области покрытия из-за препятствий, он использует протокол аукциона для систематического перераспределения и перераспределения недоступных областей другим роботам. Мы показали аналитически, что алгоритм перераспределения покрытия гарантирует полное, неперекрывающееся покрытие и что он сходится к завершению за конечное число шагов, определяемых количеством роботов в среде. Производительность алгоритма также была проверена в Webots для различных сред и различной геометрии препятствий, чтобы проверить его полноту и время охвата для сред разного размера и различной геометрии препятствий.Некоторые результаты показаны на Рисунке 8.
4.2. Распределение задач мультироботов в COMRADES
В COMRADES, когда роботы обнаруживают интересующие объекты, они запрашивают других роботов, возможно, с другими типами датчиков, посетить местоположение объекта и проверить его с помощью своих датчиков. Следовательно, каждый робот может получать запросы на посещение интересующих объектов в разных местах от нескольких роботов. Чтобы избежать чрезмерных затрат энергии и времени на посещение этих мест и анализ объекта, роботам необходимо определить подходящий маршрут для посещения этих мест.Методы распределения задач для нескольких роботов (MRTA) предоставляют структурированный метод решения этой проблемы: как найти подходящее распределение задач для роботов, чтобы задачи, выполняемые роботами, могли быть выполнены эффективным образом с точки зрения времени и энергии, затрачиваемых роботы. Мы рассматриваем категорию задач MRTA под названием ST-MR-TA (однозадачный робот, мультироботные задачи, продленное по времени назначение) [40], где ST означает однозадачных роботов, то есть каждый робот может выполнить не более одного Задача за раз, MR означает задачи с участием нескольких роботов, задачи, которые требуют выполнения нескольких роботов, а TA означает продленное по времени назначение, проблемы, при которых информация для распределения задач между роботами поступает с течением времени.Задача в сценарии COMRADES соответствует посещению робота места потенциальной мины (не обязательно одновременно с другими роботами) для анализа объекта с помощью датчиков роботов. Местоположение потенциальных наземных мин определяется динамически по мере их обнаружения с использованием методов прикрытия, описанных в разделе 4.1. MRTA в таком сценарии соответствует задаче нескольких коммивояжеров (mTSP), которая оказалась NP-сложной [41]. Предыдущая работа в MRTA по проблеме ST-MR-TA рассматривает локальную или рыночную эвристику [42–44].В COMRADES мы использовали методику на основе стохастической организации очередей для решения проблемы MRTA [45, 46]. Использование пространственных очередей привлекательно для нашей проблемы MRTA ST-MR-TA, поскольку оно обеспечивает формальную основу для распределенного принятия решений роботами, чтобы они могли эффективно реагировать на динамические изменения в распределении задач. В следующем разделе мы даем обзор алгоритма MRTA на основе пространственной организации очередей, используемого в COMRADES; детали алгоритма вместе с обширными результатами моделирования доступны в [47, 48].
4.2.1. Пространственная организация очереди для распределения задач мультироботов
Чтобы мотивировать нашу проблему MRTA, мы рассматриваем сценарий автоматического обнаружения наземных мин, в котором набор роботов развертывается в ограниченной 2D-среде с потенциальными наземными минами. Местонахождение мин не известно априори . Роботы оснащены датчиками, способными обнаруживать объекты, похожие на наземные мины, хотя и с определенной степенью неопределенности из-за шума датчиков. Роботы первоначально исследуют окружающую среду, и когда робот находит интересующий объект, который потенциально может быть наземной миной, он запрашивает других роботов, возможно, с другими типами датчиков, чтобы посетить место обнаружения и подтвердить объект с помощью своих датчиков.В рамках этой настройки задача соответствует набору роботов, посещающих местоположение интересующего объекта и записывающих сигнатуру объекта на своих датчиках. Для наглядности мы называем посещение каждым роботом местоположения объекта и снятие его показаний роботом, выполняющим свою часть задачи. Роботы могут выполнять задачу асинхронно, выполняя свою часть задачи в разное время. Задача считается выполненной, когда желаемое количество роботов выполнило свою часть задачи.Наконец, задачи могут поступать динамически, когда роботы исследуют окружающую среду и находят интересующие объекты. В этом контексте проблема MRTA соответствует поиску подходящего распределения задач для роботов, так что общее время, необходимое для выполнения задач, сокращается.
Проблема MRTA, описанная выше, соответствует настройке MR-ST-TA [42], где MR (задача с несколькими роботами) означает, что для выполнения задачи требуется несколько роботов, ST (робот с одной задачей) означает, что каждый робот может выполнить одну задачу. задача за раз, а TA (увеличенное по времени назначение) означает, что каждый робот может определять и обновлять свое расписание или порядок задач для выполнения в течение конечного временного окна, в отличие от мгновенного определения расписания задач.
Мы рассматриваем набор мобильных роботов, развернутых в ограниченной среде. Мы предполагаем, что каждый робот способен локализоваться по отношению к окружающей среде, и его поза в любой момент задается выражением. Среда также содержит набор задач, которые произвольно распределяются внутри среды; расположение задачи обозначается значком. Позиции роботов и задач изначально распределяются между роботами и считаются общеизвестными. Задача роботов — посетить место выполнения каждой задачи и выполнить определенные операции, связанные с задачей.Мы предполагаем, что задача требует, чтобы операции выполнялись разными роботами. Поскольку основное внимание в этой статье уделяется алгоритму распределения задач, мы предполагаем, что методы для надлежащего позиционирования роботов для выполнения операций в местах выполнения задач уже доступны. Расстояние между двумя задачами, и, обозначается, а расстояние между роботом и задачей обозначается. Кроме того, мы позволяем обозначать начальное положение робота и позволяем обозначать первую задачу, выбранную роботом.В рамках этой постановки проблему MRTA можно формально определить следующим образом.
Определение 1 (распределение задач для нескольких роботов). Для данного набора роботов и набора задач найдите подходящее распределение, такое, что:
Приведенная выше формулировка задачи MRTA пытается найти такое распределение для каждого робота, чтобы минимизировать расстояние, пройденное роботами для выполнения задач. Два ограничения проблемы гарантируют, что одна и та же задача не будет назначена одному и тому же роботу более одного раза, а общее количество роботов, выделенных для выполнения задачи, будет равняться спросу на задачу.
Было показано, что решение проблемы MRTA является примером динамической задачи коммивояжера и оказалось NP-трудным [49]. В этой статье мы предлагаем решение проблемы MRTA на основе пространственной очереди [50] с использованием эвристики, которая представляет расстояния между роботами и задачами в виде упорядоченной очереди на основе местоположения роботов и расстояний между задачами. Чтобы достичь этого систематическим образом, каждый робот использует следующие четыре математические конструкции.
(1) Матрица переходов между задачами .Межзадачные расстояния составляют основу нашего метода, поскольку цель метода MRTA состоит в том, чтобы позволить роботам найти подходящее расписание или порядок навигации между задачами, чтобы сократить общее пройденное ими расстояние. Межзадачные расстояния представлены в виде матрицы переходов. Матрица перехода на временном шаге обозначается и задается нормализованными обратными евклидовыми расстояниями между каждой парой задач, как показано на где .
Каждая запись представляет вероятность того, что робот выберет следующую задачу, в зависимости от расстояния между местоположениями задач.Обратите внимание, что и поэтому диагональные элементы матрицы равны нулю. Значения матрицы перехода вычисляются независимо всеми роботами. Первоначально матрица перехода вычисляется для всех пар задач, но со временем каждый робот пересчитывает матрицу, когда он завершает задачу или когда он получает информацию о том, что задача была завершена другими роботами. Вероятности перехода для выполненных задач устанавливаются равными нулю, а значения вероятности перенормируются.
(2) Вектор состояния робота .Вектор состояния робота включает обратные евклидовы расстояния между роботом и каждой задачей в окружающей среде. Вектор состояния робота на временном шаге определяется выражением где и — расстояние между роботом и задачей на временном шаге.
(3) Вектор близости задачи . Вектор близости задачи робота представляет его предпочтения для каждой задачи в среде на основе выполнения задачи сначала, а затем остальных задач. Он рассчитывается как произведение вектора состояния робота и матрицы межзадачных переходов.Вектор близости задачи для робота на временном шаге, определяется выражением
(4) Очередь пространственных задач робота. Пространственная очередь задач робота обозначает порядок, в котором робот планирует выполнять задачи в среде. Он вычисляется путем удаления всех задач из вектора близости задачи, которые заняты или завершены, и сортировки оставшихся задач в порядке убывания на основе значений их вектора близости. Очередь задач для робота на временном шаге, задается выражением
Роботы используют структуру пространственной очереди для выбора задач с помощью алгоритма пространственной очереди MRTA (SQ-MRTA).В алгоритме SQ-MRTA каждый робот сортирует доступные задачи, используя (2) — (4). Затем робот выбирает задачу в начале пространственной очереди и объявляет ставку для этой задачи на основе ее стоимости (расстояния) для выполнения этой задачи. Затем он ожидает в течение определенного периода времени, чтобы получить заявки на ту же задачу от других роботов. Если он предлагает самую высокую цену и задача все еще доступна, он приступает к выполнению задачи; в противном случае он выбирает следующую доступную задачу из своей пространственной очереди и повторяет процесс торгов.Когда он завершает выполнение задачи, робот передает сообщение о выполнении задачи. Когда роботы получают сообщение о выполнении задачи от другого робота, которое приводит к выполнению задачи (достаточное количество роботов посетило задачу), они восстанавливают свою локальную копию матрицы перехода.
Мы проверили производительность алгоритма SQ-MRTA (SQ) и сравнили его с тремя современными алгоритмами MRTA: алгоритмом на основе венгерского присвоения (HA) [51], алгоритмом децентрализованного жадного (DG) распределения. [47] и алгоритм повторных аукционов (RA) [52].Как и прежде, алгоритм был реализован на роботах Corobot в симуляторе Webots. Мы использовали,, или роботов с,, или задачами в среде. Каждую задачу требовалось выполнить 3–5 роботами. Все результаты были усреднены по результатам моделирования. Мы оценили различные показатели, включая общее время, необходимое для выполнения задач, и среднее расстояние, пройденное одним роботом. Два иллюстративных графика нашего моделирования показаны на рисунках 9 и 10. На рисунке 9 мы видим, что алгоритм SQ-MRTA работает сравнимо с алгоритмом повторных аукционов (RA).Для большего количества комбинаций роботов и задач на рис. 10 показано, что наш алгоритм SQ-MRTA работает очень близко по сравнению с алгоритмом повторных аукционов (RA), время моделирования которых не совпадает друг с другом. С другой стороны, алгоритм высокой доступности работает плохо по мере увеличения количества роботов и задач, потому что он назначает роботов задачам на основе начального размещения роботов и задач; задержки в достижении роботами задач из-за предотвращения столкновений между роботами не учитываются при определении роботов для назначений задач.Алгоритм DG неэффективен с точки зрения времени выполнения задачи, когда количество задач значительно превышает количество роботов, поскольку он назначает самую близкую задачу роботу и не может рассчитать подходящее расписание, когда каждому роботу необходимо выполнить несколько задач.
4.3. Методы агрегирования информации в COMRADES
2 Центральным аспектом автономного обнаружения наземных мин с участием нескольких роботов является объединение информации о характеристиках потенциальной наземной мины от различных типов датчиков и принятие решения о том, действительно ли объект является наземной миной, и определение его характеристик, если это действительно одно.Предыдущие исследователи [17] рассматривали эту проблему со статической точки зрения, когда предполагается, что вся информация о характеристиках наземных мин доступна, а основная концепция заключается в использовании методов статистического вывода для точной классификации характеристик наземных мин. Однако в ТОВАРИЩАХ процесс обнаружения мин не является мгновенным; она продолжается в течение периода времени, в течение которого роботы с соответствующими датчиками, соответствующими первоначально предполагаемым характеристикам потенциальной мины, должны быть развернуты в потенциальном местоположении мины, чтобы совокупная информация, собранная датчиками роботов, могла повысить точность обнаружения мин. обнаружение.Из-за такого динамического характера обнаружения наземных мин мы рассматриваем следующую проблему агрегации мультисенсорной информации и планирования работы датчиков в COMRADES, учитывая начальную сигнатуру, воспринимаемую датчиком определенного типа от потенциальной мины, которая является подходящим набором датчиков (роботов) для дополнительно развернуть к месту потенциальной мины, чтобы мина была обнаружена с большей точностью. Подробности работы метода агрегации информации, а также аналитические и экспериментальные результаты его работы приведены в [53]; в следующем разделе мы дадим обзор его основных функций и некоторые важные результаты.
Чтобы решить проблему агрегации информации и планирования датчиков в COMRADES, мы предложили новую технику, которая использует рыночный механизм агрегации информации, называемый рынком предсказаний . Каждому роботу, участвующему в задаче обнаружения наземных мин, предоставляется программный агент, который использует сенсорную информацию робота от потенциальной наземной мины и выполняет расчеты рыночной техники прогнозирования. Схема, описывающая методику, показана на рисунке 11.Когда агент регистрирует показания потенциальной наземной мины на своих датчиках, он связывает значение вероятности, называемое верой , , чтобы обозначить уверенность агента в идентификации обнаруженного объекта как наземной мины. Убеждения обусловлены прошлыми значениями убеждений, чтобы предотвратить большие отклонения от предыдущих показаний объекта из-за шума датчика или окружающих условий с использованием байесовской сети. Затем каждый агент стратегически рассчитывает отчет датчика, исходя из своих убеждений и ожидаемых вознаграждений от составления отчета, используя метод максимизации полезности.Затем он отправляет этот отчет в центральное место, называемое агрегатором , или агентом маркет-мейкера. Агрегирование или слияние информации осуществляется с помощью механизма агрегирования, который использует метод, называемый логарифмическим правилом рыночной оценки (LMSR). В этом методе используется основанная на полезности формулировка стоимости и ценности каждого датчика (робота) для идентификации интересующего объекта как наземной мины. Затем он присваивает оценку или виртуальное вознаграждение каждому датчику (роботу), если он правильно сообщает о распределении вероятностей для различных типов объектов интересов, таких как наземные мины, металл, но не наземные мины, и не наземные мины.Подробности этого метода приведены в [53]. Механизм агрегации выводит единственное агрегированное значение доверия,. Механизм агрегации также выборочно включает веса отчетов датчиков от эксперта-человека о точности отчетов датчиков на основе условий окружающей среды датчиков. Затем агрегированное значение достоверности передается агенту, принимающему решение, который принимает решения о том, какие другие роботы (типы датчиков) должны быть развернуты в потенциальном местоположении наземной мины, используя технику на основе байесовского вывода, чтобы можно было быстро и точно подтвердить факт наличия наземной мины [ 53].
Мы смоделировали наш алгоритм, используя три различных типа датчиков: MD, GPR и мультисенсорное устройство на основе ИК-излучения. Мы провели разные эксперименты с данными из разных типов источников (металлических, низкометаллических и неметаллических), собранными разными датчиками в разное время. Некоторые экспериментальные результаты нашего алгоритма при использовании идентичных распределений данных и настроек выделены на рисунках 12–14. На рисунке 12 показаны относительные затраты на развертывание датчиков и соответствующие среднеквадратичные ошибки (RMSE) по показаниям при использовании одного типа датчика.Рисунки 13 (a) –13 (d) показывают влияние развертывания нескольких датчиков разных типов с течением времени. Для этих экспериментов предполагалось, что данные поступают от одного и того же интересующего объекта-источника. С течением времени развертывались разные наборы датчиков. Мы замечаем, что при использовании MD (на рисунке 13 (a)) RMSE сокращается до временных шагов, но с комбинацией MD, IR и GPR (на рисунке 13 (d)) объединенное RMSE из объединенных данных из этих Датчики уменьшены гораздо больше, чтобы вокруг. Наконец, рисунки 14 (a) –14 (c) иллюстрируют сравнение предлагаемых нами рыночных методов прогнозирования для агрегирования информации с двумя методами.Результаты показывают, что объединение информации, выполняемое с использованием нашей методики, снижает RMSE на 5–13% по сравнению с ранее изученным методом объединения данных о наземных минах с использованием теории Демпстера-Шафера [17] и на 3–8% с использованием метода объединения распределенных данных [54]. Мы также провели несколько экспериментов, чтобы проверить влияние различных параметров в нашей модели, и обнаружили, что использование комбинации различных датчиков в окружающей среде дает наилучшую точность для определения типа объекта.
5. Выводы и направления на будущее
В этой статье мы описали наш опыт работы с системой COMRADE для автономного обнаружения наземных мин с использованием нескольких роботов. Мы настроили робота Coroware Explorer с металлоискателем для обнаружения мин и провели с ним испытания на различных участках. Мы также рассмотрели различные аспекты обнаружения наземных мин, такие как поиск и охват нескольких роботов, распределение задач для нескольких роботов и слияние мультисенсорных данных с использованием различных алгоритмов и подтвердили наши результаты с использованием имитированных внутренних роботов Corobot.
В рамках будущей работы мы рассматриваем несколько направлений улучшения предлагаемых нами методов. Интеграция более широкого набора сенсорных устройств, таких как термодатчики, георадары и химические датчики, на открытых роботизированных платформах, а также проверка правильной комбинации датчиков для различных условий окружающей среды, таких как температура окружающей среды, солнечный свет, глубина залегания мин, — постоянная работа в нашей исследовать. Мы также изучаем способы улучшения нашего алгоритма покрытия путем обмена картами между роботами, планирования путей покрытия на основе ожидаемого получения информации о наземных минах и улучшенных методов объединения информации для объединения данных с нескольких датчиков.Наконец, мы также рассматриваем возможность использования воздушных роботов, чтобы помочь наземным роботам более разумно ориентироваться в окружающей среде. В целом, мы предполагаем, что наши исследования заложат основу для дальнейших исследований и распространения систем с несколькими роботами для обнаружения наземных мин, обнаружения ядерных источников, беспилотного поиска и спасания, служб экстренного реагирования и других приложений с высоким риском.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарность
Проект COMRADES был поддержан Управлением военно-морских исследований США, грант No. N0001404.
Поиск золота | Как найти золото в США
На главную »Золото» Поиск золота в США
Переиздано из «Поиска золота в Соединенных Штатах»,
— публикации Гарольда Киркемо, представляющей общий интерес для Геологической службы США.
Жидкое золото: Золотая руда из эпитермального месторождения Олингхаус.Когда золото обнаруживается в породах, где оно кристаллизовалось, оно называется «жильными отложениями». Изображение USGS.
Множество наград за поиск золота
Любой, кто занимается поиском золота, надеется быть вознагражден блеском красок в тонком материале, собранном на дне кастрюли. Хотя физические упражнения и активный отдых на открытом воздухе полезны, есть немного острых ощущений, сравнимых с поиском золота. Даже отчет об анализе, показывающий заметное содержание золота в образце, взятом из залежи залежи, впечатляет.Тем не менее, потенциальный старатель, надеющийся на финансовую выгоду, должен тщательно рассмотреть все относящиеся к делу факты, прежде чем принимать решение о поисковом предприятии.
Немногие разведчики находят ценные месторождения золота
Только несколько старателей из многих тысяч, которые искали в западной части Соединенных Штатов, когда-либо нашли ценное месторождение. Большинство районов добычи золота на Западе были построены пионерами, многие из которых были опытными золотоискателями из южных Аппалачей, но даже в колониальные времена лишь небольшая часть искателей золота добивалась успеха.
Гидрогеохимическая разведка золота: Подземные воды, собранные из колодцев, источников и буровых скважин, могут дать ключ к разгадке наличия подземных залежей золота. Когда грунтовые воды проходят через месторождение, из горных пород выщелачиваются ничтожные количества золота. Иногда их можно обнаружить в пробах подземных вод, взятых из скважин, расположенных ниже уклона от месторождения. Изображение USGS.
В США ведутся крупные разведки
За последние несколько веков страна подверглась тщательным поискам изыскателей.Во время депрессии 1930-х годов старатели искали наиболее известные золотодобывающие районы по всей стране, особенно на Западе, а также малоизвестные районы. Результаты их деятельности никогда не были полностью задокументированы, но неполные записи показывают, что чрезвычайно небольшой процент от общего числа активных старателей обеспечивал себя добычей золота. Из немногих значительных открытий, о которых сообщалось, почти все были сделаны изыскателями с большим опытом, которые были знакомы с регионами, в которых они работали.
Золотое панорамирование стало проще: Гэри Смит, мойщик золота из Британской Колумбии с 40-летним опытом, демонстрирует свои методы панорамирования и дает советы. Больше видео с панорамированием золота.
Проспект, где золото было найдено до
Отсутствие выдающихся успехов, несмотря на резкое увеличение объемов разведки во время депрессии 1930-х годов, подтверждает мнение тех, кто наиболее знаком с месторождением золота и развитием золотодобывающих районов, о том, что наилучшие шансы на успех лежат в систематических исследованиях известные производственные районы, а не в попытках обнаружить золото в ранее непродуктивных областях.
Развитие новых, высокочувствительных и относительно недорогих методов обнаружения золота, однако, значительно увеличило возможность обнаружения месторождений золота с слишком низким содержанием золота, чтобы их мог раньше распознать изыскатель, используя только золотую чашу. Они могут быть достаточно большими, чтобы их можно было использовать с помощью современных горнодобывающих и металлургических технологий. На руднике Карлин около Карлина, штат Невада, золото добывали из крупного месторождения с низким содержанием золота, которое было открыто в 1965 году после завершения интенсивных научно-технических работ.Подобные исследования привели к открытию месторождения золота типа Карлин в каньоне Джерритт, штат Невада.
Золотое панорамирование стало проще: Гэри Смит, мойщик золота из Британской Колумбии с 40-летним опытом, демонстрирует свои методы панорамирования и дает советы. Больше видео с панорамированием золота.
ОБЪЯВЛЕНИЕ
Золотой земснаряд: Плавучий земснаряд, работающий недалеко от Фэрплея, Колорадо, в 1950 году.Подобные машины могут выкапывать сотни тонн осадка в день и обрабатывать его для удаления золота. Изображение USGS.
Было отработано много россыпных месторождений — дважды
Многие считают, что можно получать заработную плату или лучше, промывая золото в потоках Запада, особенно в регионах, где раньше процветала россыпная добыча. Однако большинство россыпных месторождений подвергались тщательной переработке как минимум дважды — сначала китайскими рабочими, которые прибыли вскоре после начальных периодов бума и извлекли золото из месторождений более низкого качества и хвостов, оставленных первыми горняками, а затем странствующими горняками во время периода экономического подъема. 1930-е гг.
Геологи и инженеры, которые систематически исследуют отдаленные районы страны, находят небольшие раскопки россыпей и старые разведочные карьеры, количество и широкое распространение которых подразумевает наличие нескольких, если таковые имеются, распознаваемых поверхностных признаков залежей металлов, которые не были замечены ранее шахтерами и изыскателями.
Сходящиеся границы плит представляют собой тектоническую структуру плит многих месторождений золота. Там магма, образованная плавлением нисходящей литосферы, поднимается в виде магматических очагов и кристаллизуется близко к поверхности.Золото в этих горячих средах часто растворяется в перегретой воде и уносится из магматического очага по разломам и трещинам. Температура воды рядом с магматическим очагом очень высока, но с увеличением расстояния падает. По мере того, как вода перемещается дальше от магматической камеры, золото начинает кристаллизоваться внутри трещины, образуя жильное месторождение золота. Изображение USGS.
Финансовые проблемы поиска золота
Тот, кто задумывается о поиске золота, должен понимать, что успешное предприятие не обязательно означает большую прибыль, даже если открытие превращается в добывающую шахту.Хотя цена на золото значительно выросла с 1967 года, когда была отменена фиксированная цена в 35 долларов за унцию, рост стоимости практически всех предметов снабжения и услуг, необходимых для геологоразведочных и горнодобывающих предприятий, сохранил маржу прибыли на умеренном уровне, особенно для оператор небольшой шахты. В целом, большие колебания цен на золото не редкость, тогда как инфляционное давление более устойчиво. Таким образом, производитель золота сталкивается с неопределенными экономическими проблемами и должен осознавать их влияние на его деятельность.
Карта конвергентной границы: Современная сходящаяся граница расположена вдоль тихоокеанской северо-западной части Соединенных Штатов и простирается на север вдоль побережья Канады. Вулканическая активность здесь создаст месторождения золота будущего. Золотые месторождения, добываемые сегодня, были произведены древней деятельностью на нынешних границах плит или древней деятельностью на границах, которые больше не действуют. Изображение USGS.
Знание законов и право собственности
Сегодняшний изыскатель должен определить, где разрешена разведка, и знать правила, согласно которым ему разрешается искать золото и другие металлы.Разрешение на владение землей в частной собственности должно быть получено от землевладельца. Определение права собственности на землю и ее местоположения, а также контакты с владельцем могут потребовать много времени, но это необходимо сделать до того, как можно будет начать поисковые работы.
Определение местоположения и площади государственных земель, открытых для входа полезных ископаемых для разведки и добычи, также требует много времени, но необходимо. Национальные парки, например, закрыты для разведки. Некоторые земли, находящиеся под юрисдикцией Лесной службы и Бюро землеустройства, могут быть допущены к разведке, но въезд регулируется набором правил и положений.Следующее заявление из брошюры, выпущенной в 1978 году Министерством внутренних дел США и озаглавленной «Заявка на добычу полезных ископаемых на федеральных землях», является ответом на вопрос «Где я могу вести разведку?»
«Есть еще районы, где вы можете вести разведку, и если будет обнаружен ценный, доступный минерал, вы можете заявить претензию. Эти районы в основном находятся на Аляске, Аризоне, Арканзасе, Калифорнии, Колорадо, Флориде, Айдахо, Луизиане. , Миссисипи, Монтана, Небраска, Невада, Нью-Мексико, Северная Дакота, Орегон, Южная Дакота, Юта, Вашингтон и Вайоминг.Такие районы в основном представляют собой незарезервированные, не присвоенные федеральные государственные земли, находящиеся в ведении Бюро землеустройства (BLM) Министерства внутренних дел США, и в национальных лесах, находящихся в ведении Лесной службы Министерства сельского хозяйства США. Государственные земельные записи в соответствующем государственном управлении BLM покажут вам, какие земли закрыты для доступа к минералам в соответствии с законами о добыче полезных ископаемых. Эти офисы постоянно обновляют таблички со статусом земли, которые доступны для ознакомления. BLM публикует серию карт владения землей и полезными ископаемыми, которые отображают общую структуру собственности на государственные земли.Эти карты можно приобрести в большинстве офисов BLM. Для конкретного участка земли рекомендуется проверить официальные земельные записи в соответствующем государственном управлении BLM ».
Колонковое бурение для добычи золота: Колонковое бурение массивного сульфидного месторождения Бенд, расположенного в районе Медфорд национального заповедника Чеквамегон, штат Мичиган. Это небольшое, богатое металлами сульфидное тело, расположенное в вулканических породах раннепротерозойского возраста. Минерализованный горизонт располагается под ледниковым покровом на глубине 100–120 футов и состоит из массивного пирита с различным количеством халькопирита, тетраэдрита-тенантита, борнита, арсенопирита, халькоцита и редких теллуридов золота и серебра.Изображение USGS.
Мелкие изыскатели и общая добыча золота
Успешная добыча золота в нынешних условиях — это крупномасштабная операция с использованием дорогостоящего и сложного оборудования, способного ежедневно обрабатывать много тонн руды с низким содержанием золота. Седоватый старатель с осликом больше не является значительным участником поисков месторождений полезных ископаемых, а на мелкий производитель приходится лишь незначительная доля от общего объема добычи металлов, включая золото.
Золотой керн в лаборатории: Керн, извлеченный из массивного сульфидного месторождения Бенд (см. Фото бурения выше), имел 3 дюйма в диаметре и был извлечен 10-футовыми секциями. Секции были извлечены из буровой штанги в пластиковые мешки и доставлены в лабораторию для тщательного изучения, отбора проб и анализа. USGS image.
Учеба, настойчивость и финансовая поддержка
Некоторый успех в поиске золота все еще остается для тех, кто выбирает благоприятные районы после тщательного изучения горных документов и геологии горных районов.Никто не должен предпринимать серьезных попыток разведки без достаточного капитала для поддержки длительной и, возможно, обескураживающей кампании предварительных работ. У потенциального искателя золота должно быть достаточно средств для поездок в регион и из региона, который он выбирает для поиска и поддержки предприятия. Он должен быть готов к физическим трудностям, иметь машину, способную путешествовать по самым трудным и крутым дорогам, и не унывать из-за повторяющихся разочарований. Даже если ценное открытие не будет найдено, предприятие будет интересным и трудным.
На руднике Fortitude в Неваде в период с 1984 по 1993 год было добыто около 2 миллионов унций золота. USGS image.
Общественная информация для золотоискателей
Местоположение важных золотодобывающих районов США показано в некоторых отчетах Геологической службы США, перечисленных в нижней части этой страницы. Также перечислены геологические исследования основных золотодобывающих государств, по которым можно получить дополнительную информацию.Информацию также можно получить в офисах по связям с государствами Горного бюро США, расположенных в столицах большинства штатов. Существует также большое количество книг о золоте для неспециалистов, в которых описываются месторождения золота и поиск золота.
Гидравлическая разработка россыпи на руднике Лост Чикен Хилл, недалеко от Чикена, Аляска. Шланг взрывает обнажение наносов, смывая песок, глину, гравий и частицы золота. Затем материал обрабатывается для удаления золота. Изображение USGS.
Геология россыпных отложений
Россыпные отложения — это скопления природного материала, накопившиеся в рыхлых отложениях русла ручья, пляжа или остаточных отложений. Золото, полученное в результате выветривания или других процессов из залежей залежей, вероятно, будет накапливаться в россыпных отложениях из-за своего веса и устойчивости к коррозии. Кроме того, характерный солнечно-желтый цвет делает его легко и быстро узнаваемым даже в очень небольших количествах.Золотая чаша или шахтерская чаша — это неглубокий сосуд из листового железа с наклонными сторонами и плоским дном, используемый для мытья золотосодержащего гравия или другого материала, содержащего тяжелые минералы. Процесс промывки материала в поддоне, называемый «отливкой», является самым простым и наиболее часто используемым и наименее дорогим методом для старателей отделить золото от ила, песка и гравия в отложениях ручья. Это утомительная, изнурительная работа, и только с практикой можно овладеть ею.
Россыпные месторождения Калифорнии
Многие россыпные районы Калифорнии были добыты в больших масштабах еще в середине 1950-х годов.В ручьях, истощающих богатый регион Матери-Лоде — Реки Перо, Мокелумне, Америка, Косумнес, Калаверас и Юба, а также в реке Тринити в северной Калифорнии, в гравии сконцентрировано значительное количество золота. Кроме того, россыпи, связанные с гравием, которые являются остатками ручьев от более старого цикла эрозии, встречаются в той же общей области.
Россыпные месторождения Аляски
Большая часть золота, добываемого на Аляске, была добыта из россыпей. Эти отложения широко распространены и встречаются вдоль многих крупных рек и их притоков.Некоторые песчаные пляжи океана также были продуктивными. Основным регионом добычи россыпей был бассейн реки Юкон, которая пересекает центральную часть Аляски. Дноуглубительные работы в районе Фэрбенкс были самыми продуктивными в штате. Береговые отложения в районе Ном в южно-центральной части полуострова Сьюард занимают второе место среди продуктивных россыпных месторождений Аляски. Другие высокопродуктивные россыпи были обнаружены в бассейне реки Медь и реки Кускоквим.
Россыпные месторождения Монтаны
В Монтане основные районы добычи россыпей находятся в юго-западной части штата.Самое продуктивное россыпное месторождение в штате было в Олдер-Галч около Вирджиния-Сити в округе Мэдисон. Другие важные россыпи находятся на реке Миссури в горнодобывающем районе Хелена. Знаменитый Ущелье Последнего Шанса — это место, где находится город Елена. Дальше на юг, в верховьях и притоках реки Миссури, есть много округов, особенно в округе Мэдисон, который занимает третье место по общему объему добычи золота в штате. Золото добывали во многих местах в верховьях Кларк-Форк реки Колумбия, особенно в окрестностях Бьютта.Однако добыча россыпей в районе Бьютт затмевается общим объемом производства побочного золота, извлеченного при разработке залежей меди, свинца и цинка.
Россыпные месторождения Айдахо
Айдахо когда-то был ведущим штатом по добыче россыпей. Одна из основных дноуглубительных работ находится в бассейне Бойсе, в нескольких милях к северо-востоку от Бойсе, в западно-центральной части штата. Другие россыпные месторождения расположены вдоль реки Салмон, реки Клируотер и ее притоков, особенно в Элк-Сити, Пирсе и Орофино.Чрезвычайно мелкозернистое (или «мучное») золото встречается в песчаных отложениях вдоль реки Снейк в южном Айдахо.
Россыпные месторождения Колорадо
Россыпей в Колорадо было добыто в районе Фэйрплей в округе Парк и в районе Брекенридж в округе Саммит. В обоих районах большие земснаряды использовались во время пика активности в 1930-х годах.
Россыпные месторождения Орегона
Наиболее важные горнодобывающие регионы Орегона находятся в северо-восточной части штата, где были обнаружены месторождения золота и россыпи.Россыпное золото встречается во многих ручьях, истощающих Голубые и Валловские горы. Один из самых продуктивных россыпных районов в этом районе находится в районе Самптера, в верховьях Паудер-Ривер. Сгоревшая река и ее притоки дали золото. Дальше на запад в долине реки Джон Дэй в течение многих лет ведется разработка россыпей (в частности, дноуглубительные работы). В юго-западном Орегоне притоки реки Роуг и соседние ручьи в горах Кламат были источниками россыпного золота.Среди основных производственных районов в этом регионе — район Гринбэк в округе Джозефин и округ Эпплгейт в округе Джексон.
Южная Дакота и Вашингтон
Незначительное количество россыпного золота было добыто в Южной Дакоте (регион Блэк-Хиллз, особенно в районе Дедвуда, и на Французском ручье, недалеко от Кастера) и в Вашингтоне (на реках Колумбия и Снейк и их притоках).
Невада, Аризона, Нью-Мексико
Помимо этих мест, россыпное золото встречается вдоль многих прерывистых и эфемерных потоков засушливых регионов Невады, Аризоны, Нью-Мексико и южной Калифорнии.Во многих из этих мест могут существовать большие запасы россыпного золота с низким содержанием, но отсутствие постоянного водоснабжения для традиционных операций по добыче россыпи требует использования дорогостоящих методов сухого или полусухого обогащения для извлечения золота.
Россыпные месторождения на востоке США
В восточных штатах небольшое количество золота было вымыто из некоторых ручьев, дренирующих восточный склон южных Аппалачей в Мэриленде, Вирджинии, Северной Каролине, Южной Каролине, Джорджии и Алабаме.Многие месторождения сапролита (разложившаяся несколько разложившаяся порода, лежащая на своем первоначальном месте) в этом районе также были добыты россыпными методами. Небольшие количества золота добывались россыпными методами в некоторых штатах Новой Англии. На Востоке могут быть обнаружены дополнительные россыпные месторождения, но поиски потребуют значительных затрат времени и денег. Месторождения, вероятно, будут низкосортными, трудно распознаваемыми и дорогостоящими для изучения и отбора проб. Более того, большая часть земли на Востоке находится в частной собственности, и разведка может проводиться только с предварительного разрешения и согласия землевладельца.
Золото Книги и принадлежности для мытья посуды
Лод Голд
Жидкое золото встречается в твердой породе, в которой оно было отложено.Области, которые могут содержать ценные залежи золота, были исследованы настолько тщательно, что неопытный старатель без достаточного капитала имеет мало шансов обнаружить новую залежь, достойную разработки. Большинство будущих открытий пригодных для использования руд золота, вероятно, будет результатом продолжающихся исследований в областях, которые, как известно, были продуктивными в прошлом. Районы, в которых могут быть возможны такие новые открытия золота, слишком многочисленны, чтобы их подробно перечислять в этой брошюре. Вот некоторые из известных районов: в Калифорнии районы Аллегани, Сьерра-Сити, Грасс-Вэлли и Невада-Сити, а также пояс Матери-Лод; в Колорадо, округах Крипл-Крик, Теллурайд, Сильвертон и Орей; в Неваде — округах Голдфилд, Тонопа и Комсток; в Южной Дакоте, ведущий район Блэк-Хиллз; а на Аляске — районы Джуно и Фэрбенкс.Месторождения в этих районах обычно представляют собой золото-кварцевые залежи.
| Источники информации о золоте |
|
Есть много публикаций, представляющих интерес для тех, кто ищет больше информации о золоте. Геологическая служба США опубликовала множество отчетов об общей геологии и минеральных ресурсах большинства основных золотодобывающих районов. Кроме того, большинство государственных геологических служб, в которых производилась добыча золота, составили отчеты и карты для документирования общей геологии, месторождений и горнодобывающей деятельности.Есть также много путеводителей и карт, предназначенных для старателей-любителей. |
Тщательно разведаны месторождения золота
Разведка залежей золота — не такая относительно простая задача, как раньше, потому что большинство обнажений или обнажений минерализованной породы были исследованы и взяты образцы. Сегодняшний старатель должен исследовать не только эти обнажения, но и обломки горных пород на отвалах и обнажения минерализованной породы в доступных горных выработках.
Неоткрытое золото тонкораспространено
Золото, если оно присутствует, может не быть видимым в породе, и его обнаружение будет зависеть от результатов лабораторных анализов. Обычно образцы от 3 до 5 фунтов типичной минерализованной породы отправляются в коммерческую аналитическую лабораторию или пробирный офис для анализа. Очевидно, что знание геологической природы месторождений золота и, в частности, горных пород и залежей в интересующей области поможет разведчику.
Найдите другие темы на Geology.com:
|
| ||
|
| ||
|
| ||
|
Разработка геномов коронавируса для разгадки истоков вспышки | Наука
В рамках длительной попытки выяснить, какие вирусы скрывают летучие мыши, исследователи в Китае исследуют один, временно захваченный в пещере в Гуандуне.
EcoHealth AllianceАвтор: Джон Коэн,
attaaaggtt tataccttcc caggtaacaa accaaccaac tttcgatctc ttgtagatct…
Эта цепочка очевидной тарабарщины совсем не похожа: это фрагмент последовательности ДНК вирусного патогена, получившего название нового коронавируса 2019 года (2019-nCoV), который подавляет Китай и пугает весь мир.Ученые публично делятся постоянно растущим числом полных последовательностей вируса от пациентов — 53, по последним подсчетам в базе данных Глобальной инициативы по обмену всеми данными о гриппе. Эти вирусные геномы интенсивно изучаются, чтобы попытаться понять происхождение 2019-nCoV и то, как он вписывается в генеалогическое древо родственных вирусов, обнаруженных у летучих мышей и других видов. Они также получили представление о том, как этот недавно обнаруженный вирус физически выглядит, как он меняется и как его можно остановить.
«Один из самых важных выводов [из вирусных последовательностей] заключается в том, что было однократное внедрение в организм человека, а затем распространение от человека к человеку», — говорит Тревор Бедфорд, специалист по биоинформатике из Вашингтонского университета и Исследовательского центра рака Фреда Хатчинсона Центр. Роль оптового рынка морепродуктов Хуанань в Ухане, Китай, в распространении 2019-nCoV остается неясной, хотя такое секвенирование в сочетании с отбором образцов рыночной среды на наличие вируса проясняет, что оно действительно сыграло важную раннюю роль в усилении вспышка.По словам большинства исследователей, вирусные последовательности также опровергают идею о том, что возбудитель пришел из института вирусологии в Ухане.
В целом, 2019-nCoV содержит около 29000 нуклеотидных оснований, на которых хранится книга генетических инструкций по производству вируса. Хотя это один из многих вирусов, гены которых представлены в форме РНК, ученые конвертируют вирусный геном в ДНК с основаниями, сокращенно называемыми A, T, C и G, для облегчения изучения. Многие анализы последовательностей 2019-nCoV уже появились в вирусологических исследованиях.org, nextstrain.org, серверы препринтов, такие как bioRxiv, и даже в рецензируемых журналах. Обмен последовательностями китайских исследователей позволил лабораториям общественного здравоохранения по всему миру разработать собственные средства диагностики вируса, который теперь был обнаружен в 18 других странах. (Новости Science о вспышке болезни можно найти здесь.)
Когда стала доступна первая последовательность 2019-nCoV, исследователи поместили ее в генеалогическое древо известных коронавирусов, которые многочисленны и инфицируют многие виды, и обнаружили, что она наиболее тесно связана с родственниками, обнаруженными у летучих мышей.Команда под руководством Ши Чжэн-Ли, специалиста по коронавирусу из Уханьского института вирусологии, сообщила 23 января на сайте bioRxiv, что последовательность 2019-nCoV на 96,2% похожа на вирус летучих мышей и на 79,5% похожа на коронавирус, вызывающий тяжелую острую болезнь. респираторный синдром (SARS) — заболевание, первоначальная вспышка которого также произошла в Китае более 15 лет назад. Но коронавирус SARS так же тесно связан с вирусами летучих мышей, и данные о последовательности убедительно доказывают, что он проник в людей от коронавируса в циветтах, которые отличались от вирусов SARS человека всего на 10 нуклеотидов.Это одна из причин, по которой многие ученые подозревают, что между летучими мышами и 2019-nCoV существует «промежуточный» вид-хозяин — или несколько.
Согласно анализу Бедфорда, последовательность коронавируса летучих мышей, выделенная командой Ши Чжэн-Ли и получившая название RaTG13, отличается от 2019-nCoV почти на 1100 нуклеотидов. На сайте nextstrain.org, соучредителем которого он является, Бедфорд создал генеалогические деревья коронавируса (пример ниже), которые включают последовательности летучих мышей, циветт, SARS и 2019-nCoV. (Деревья интерактивны — перетащив на них указатель мыши, можно легко увидеть различия и сходства между последовательностями.)
Проведенный Бедфордом анализ RaTG13 и 2019-nCoV предполагает, что два вируса имели общего предка 25-65 лет назад, оценка, к которой он пришел, объединив разницу в нуклеотидах между вирусами с предполагаемой частотой мутаций в других коронавирусах. Таким образом, вероятно, потребовались десятилетия, чтобы RaTG13-подобные вирусы мутировали в 2019-nCoV.
Ближневосточный респираторный синдром (MERS), еще одно заболевание человека, вызываемое коронавирусом, также имеет связь с вирусами летучих мышей.Но исследования убедительно доказали, что люди перескочили с верблюдов. А филогенетическое дерево из статьи Ши bioRxiv (ниже) позволяет легко увидеть связь верблюда-MERS.
Чем дольше вирус циркулирует в человеческой популяции, тем больше у него времени для развития мутаций, которые дифференцируют штаммы у инфицированных людей, и, учитывая, что последовательности 2019-nCoV, проанализированные на сегодняшний день, отличаются друг от друга не более чем на семь нуклеотидов, это говорит о том, что прыгнул в людей совсем недавно.Но остается загадкой, какое животное распространило вирус среди людей. «Существует очень большая серая зона между вирусами, обнаруженными у летучих мышей, и вирусом, который сейчас изолирован у людей», — говорит Винсент Мюнстер, вирусолог из Национального института аллергии и инфекционных заболеваний США, изучающий коронавирусы у летучих мышей, верблюдов и других видов.
Убедительные данные свидетельствуют о том, что рынок сыграл одну из первых ролей в распространении 2019-nCoV, но остается неясным, был ли он причиной вспышки. Многие из первоначально подтвержденных случаев 2019-нКоВ — 27 из первых 41 в одном отчете и 26 из 47 в другом — были связаны с рынком Ухани, но до 45%, включая самые ранние, не были.Это повышает вероятность того, что первоначальный прыжок в людей произошел где-то в другом месте.
По данным государственного информационного агентства «Синьхуа», «отбор проб окружающей среды» на рынке морепродуктов в Ухане обнаружил доказательства 2019-nCoV. Из 585 протестированных образцов 33 оказались положительными на 2019-nCoV, и все они относились к западной части огромного рынка, где продавались дикие животные. «Положительные тесты на влажном рынке чрезвычайно важны», — говорит Эдвард Холмс, биолог-эволюционист из Сиднейского университета, который сотрудничал с первой группой, которая публично выпустила последовательность 2019-nCoV.«Такой высокий уровень положительных результатов тестов может означать, что животные на рынке сыграли ключевую роль в появлении вируса».
Тем не менее, не было никаких препринтов или официальных научных отчетов об отборе проб, поэтому неясно, у каких животных был положительный результат, если таковые были. «До тех пор, пока вы не будете последовательно изолировать вирус от одного вида, будет действительно очень сложно определить, что является естественным хозяином», — говорит Кристиан Андерсен, биолог-эволюционист Scripps Research.
Одно из возможных объяснений путаницы в отношении того, где вирус впервые попал в людей, заключается в том, что на разных рынках продавалась партия недавно инфицированных животных. Или зараженный торговец животными мог передать вирус разным людям на разных рынках. Или, как предполагает Бедфорд, эти ранние случаи могли быть инфицированы вирусами, которые нелегко передавались и распространялись. «Было бы очень полезно получить хотя бы одну или две последовательности из рыночных данных [отбор проб окружающей среды], которые могли бы пролить свет на то, сколько зоонозов произошло и когда они произошли», — говорит Бедфорд.
Исследовательская группа отправила образцы фекалий и других тел от летучих мышей, которых они поймали в пещерах, в Уханьский институт вирусологии для поиска коронавирусов.
EcoHealth AllianceВвиду отсутствия четких выводов о происхождении вспышки теории процветают, а некоторые из них оказались шаткими с научной точки зрения. Анализ последовательности, проведенный Вей Цзи из Пекинского университета и опубликованный в Интернете в журнале Journal of Medical Virology , получил широкое освещение в прессе, когда он предположил, что «змея является наиболее вероятным резервуаром среди диких животных для 2019-nCoV.Специалисты по секвенированию, однако, осудили это.
Теорий заговора тоже предостаточно. Сообщение CBC News о депортации канадским правительством китайских ученых, которые работали в лаборатории Виннипега, изучающей опасные патогены, было искажено в социальных сетях, чтобы предположить, что они были шпионами, которые контрабандой вывозили коронавирусы. Уханьский институт вирусологии, ведущая лаборатория в Китае, изучающая коронавирусы летучих мышей и человека, также подвергся критике. «Эксперты опровергают маргинальную теорию, связывающую коронавирус в Китае с исследованиями в области оружия», — гласил заголовок статьи The Washington Post , посвященной объекту.
Опасения по поводу института возникли еще до этой вспышки. Nature опубликовал в 2017 году статью о строительстве новой лаборатории уровня биобезопасности 4, в которую вошел молекулярный биолог Ричард Эбрайт из Университета Рутгерса, Пискатауэй, который выразил обеспокоенность по поводу случайных инфекций, которые, как он отметил, неоднократно происходили с сотрудниками лаборатории, работающими с SARS в Пекине. Эбрайт, который имеет долгую историю появления красных флажков в отношении исследований с опасными патогенами, также в 2015 году раскритиковал эксперимент, в котором были внесены изменения в вирус, похожий на атипичную пневмонию, циркулирующий у китайских летучих мышей, чтобы выяснить, может ли он вызывать заболевание у людей. .Ранее на этой неделе Эбрайт поставил под сомнение точность расчетов Бедфорда, согласно которым существует не менее 25 лет эволюционного расстояния между RaTG13 — вирусом, хранящимся в Уханьском институте вирусологии, — и 2019-nCoV, утверждая, что частота мутаций могла быть другой по мере его прохождения. через разных хозяев до людей. Эбрайт сообщает Science Insider, что данные о 2019-nCoV «согласуются с проникновением в человеческую популяцию как в результате стихийного бедствия или лабораторной аварии».
Ши не ответила на электронные письма от Science , но ее давний соратник, эколог Питер Дасзак из EcoHealth Alliance, отверг предположение Эбрайт.«Каждый раз, когда возникает новая болезнь, новый вирус, всплывает одна и та же история: это распространение или выброс агента или биоинженерного вируса», — говорит Дашак. «Это просто позор. Кажется, что люди не могут сопротивляться противоречиям и этим мифам, но это смотрит нам прямо в глаза. В дикой природе существует невероятное разнообразие вирусов, и мы только прикоснулись к нему поверхностно. В пределах этого разнообразия будут некоторые, которые могут заразить людей, а в этой группе будут некоторые, вызывающие болезни ».
Группа исследователей из Уханьского института вирусологии и EcoHealth Alliance заперла летучих мышей в пещерах по всему Китаю, например, в этой в Гуандуне, чтобы проверить их на наличие коронавирусов.
EcoHealth AllianceГруппа Дашака и Ши в течение 8 лет отлавливала летучих мышей в пещерах по всему Китаю, чтобы взять образцы их фекалий и крови на вирусы. Он говорит, что они собрали образцы более 10 000 летучих мышей и 2 000 других видов. Они обнаружили около 500 новых коронавирусов, около 50 из которых относительно близки к вирусу атипичной пневмонии на генеалогическом древе, в том числе RaTG13 — он был выловлен из образца фекалий летучих мышей, который они собрали в 2013 году в пещере в Модзян в провинции Юньнань.«Мы не можем предположить, что только потому, что этот вирус из Юньнани имеет высокую идентичность последовательности с новым вирусом, который является источником», — говорит Дашак, отмечая, что была обнаружена лишь крошечная часть коронавирусов, заражающих летучих мышей. «Я ожидаю, что после того, как мы соберем пробы, пробы и пробы на юге Китая и в центральном Китае, мы обнаружим много других вирусов, и некоторые из них будут ближе [к 2019-nCoV]».
Это не просто «любопытный интерес», чтобы выяснить, что спровоцировало нынешнюю вспышку, — говорит Дашак.«Если мы не найдем источник, это может быть бушующая инфекция где-то на ферме, и как только эта вспышка прекратится, может возникнуть дальнейшее распространение, которое действительно трудно остановить. Но до сих пор неясно, каковы настоящие истоки этого ».
Связанные
jbaskauf / minesweeper: реализация мобильного приложения Android Minesweeper
Это Android-приложение Minesweeper является классным проектом компании Mobile Software Development (преподаватель Петер Эклер в AIT в Будапеште).Это реализация классической игры, оптимизированная для мобильных телефонов.
Характеристики
Это приложение реализует основные функции Minesweeper. Игровая доска — это настраиваемый вид, который реагирует на события касания пользователя и взаимодействует с базовым классом модели, чтобы отслеживать текущее состояние игры. Это позволяет пользователю открывать квадраты, отображая количество мин, окружающих этот квадрат. Когда пользователь нажимает на квадрат, вокруг которого нет мин, все квадраты вокруг него автоматически открываются.Если квадрат — это мина, он обнаруживает все мины на доске и показывает пользователю Snackbar, указывающий на то, что игра окончена.
Когда пользователь идентифицирует мину, он может пометить квадрат, переключив переключатель флажка и щелкнув квадрат, где находится мина. Количество флагов точно такое же, как и у мин, поэтому пользователь не может разместить больше флагов, если они закончатся. Пользователь не обязан ставить флажки на все мины (они все равно могут выиграть игру, если все не-минные квадраты открыты, а все квадраты мин по-прежнему закрыты).
Простой пользовательский интерфейс приложения позволяет пользователю легко анализировать текущее состояние игры, отмечать мины и перезапускать игру, если они проиграли. Кроме того, в базовом классе модели размеры доски и количество мин можно легко настроить, не влияя на общее функционирование приложения (но в настоящее время это невозможно изменить из пользовательского интерфейса).
Структура репо
Для простоты, только соответствующие файлы и каталоги (т.е.е. файлы, созданные или измененные мной, а не автоматически созданные Android Studio) включены в эту диаграмму.
├── README.md: Описание этого репозитория
│
└── Minesweeper / app: файлы проекта
├── src / main
│ ├── java /.../ minesweeper: основные классы Kotlin для проекта
│ │ ├── модель: MinesweeperModel.kt
│ │ ├── ui: MinesweeperView.kt
│ │ └── MainActivity.kt: класс Kotlin для основного Activity
│ │
│ ├── res: сопутствующие файлы ресурсов для проекта
│ │ ├── drawable: XML-файлы для настраиваемой дорожки и ползунок для флажкового переключателя, настраиваемая кнопка перезапуска
│ │ ├── layout: XML-файл для макета MainActivity
│ │ └── значения: файлы xml для извлеченных строк и настроенных стилей.
│ │
│ └── AndroidManifest.xml: файл манифеста для приложения
│
└── сборка.gradle: файл gradle для модуля приложения
Будущие улучшения
Поскольку код можно легко изменить, чтобы изменить размер доски и количество мин, это приложение может быть изменено в будущем, чтобы включить несколько уровней или различные трудности с досками разных размеров.
Я хотел бы немного изменить способ случайной генерации мин, чтобы они размещались после первого щелчка пользователя. Это помешает пользователю каждый раз нажимать на мину на своем первом ходу, когда у него еще нет никаких подсказок относительно того, где могут быть спрятаны мины.
Я также хотел бы сделать это приложение адаптируемым к разным размерам экрана. В частности, макет экрана не оптимизирован для планшетов или альбомной ориентации.
Авторы
Джесси Баскауф
Ледяная шахта Coudersport — Coudersport, Пенсильвания
Летом 1894 года незадачливый искатель удачи прочесал склоны того, что сейчас является Ледяной горой, с помощью волшебного жезла, намереваясь найти сказочные месторождения серебра, которые, как он (по какой-то причине) полагали, были похоронены под ними.Когда волшебная палка наконец показала ему место, он принялся копать. Однако в отличие от того, как обычно разыгрывается этот тип сценария, он пришел не с пустыми руками.
Вместо этого он ударил в глубокую подземную шахту, причудливо полную льда.
Ледяная шахта Кудерспорт — интригующая и загадочная геологическая аномалия. Весной, когда тает остальная часть северного полушария, в этой пещере глубиной 40 футов начинает формироваться лед, объем которого увеличивается по мере того, как температура снаружи становится все более и более жаркой; Вы можете посетить его в жаркий летний день, встать за пределами шахты и почувствовать прохладный ветерок от льда, который образуется внутри скал.Затем осенью лед начинает таять, превращаясь в ничто в течение зимы, только для того, чтобы снова начать цикл, как только холод, наконец, начнет покидать воздух.
Динамика этого нелогичного процесса еще не до конца понятна, но преобладающая в настоящее время теория утверждает, что трещины в горных вершинах втягивают холодный воздух зимой, а затем вытесняют его летом. Благодаря случайному расположению этих трещин, процесс выталкивания направляет весь холодный зимний воздух в ледовую шахту Coudersport, где сверхохлажденная среда вытягивает влагу из влажного наружного воздуха, образуя лед.
По мере того, как в пещеру поступает воздух прошлой зимы, трещины заполняются теплым летним воздухом, который впоследствии будет выталкиваться в пещеру зимой, растапливая лед. Есть и другие подобные ледяные пещеры — особенно в других геологически подобных местах в Пенсильвании, Западной Вирджинии и Нью-Йорке, — но ледяная шахта Кудерспорт — самая большая такая пещера к востоку от Миссисипи.
Пещера фактически использовалась для хранения еды и других материалов вскоре после ее открытия, но с начала 20 века она была просто любопытной местной достопримечательностью.Сегодня смотровая площадка наверху Ледяной шахты позволяет посетителям заглянуть в странную ледяную шахту внизу. Температура постоянно отслеживается в течение года, и геологи в настоящее время изучают шахту, чтобы узнать больше о природных явлениях, происходящих в пещере.
Создайте систему подготовки учеников в своей церкви
Четыре года назад я столкнулся с жестокими фактами об обучении в нашей церкви. Мы добавляли новые группы. Мы даже подготавливали учеников. Однако нам не удалось создать систему подготовки учеников, которая делала бы воспроизводящих учеников.
Сотни воспроизводящих лидеров были разработаны с того болезненного момента. Наше движение по воспитанию учеников растет в геометрической прогрессии без какого-либо общественного давления. Пять ключевых усилий привели к изменениям. Я считаю, что каждый из них может быть реализован в вашем окружении.
1. Сделайте воспитание учеников миссией вашей церкви
Иисус повелел нам подготавливать учеников. Это основная миссия церкви. Чтобы отразить примат этого мандата, формулировка миссии нашей церкви представляет собой определение зрелого ученика (см. Диаграмму A).
У первой церкви, которой я служил, была очень широкая миссия. У меня не было полномочий или влияния, чтобы изменить это. Если вы оказались в такой ситуации, подумайте о том, чтобы использовать часть заявления о миссии вашей церкви, посвященную ученичеству, в качестве стартовой площадки для создания полезного заявления о миссии, которое определяет зрелого ученика для вашего отдела. Публичное определение зрелого ученика необходимо для построения системы подготовки учеников.
2. Предоставьте карту подготовки учеников
После того, как вы определили, как выглядит ученик, очень важно предоставить карту, которая поможет людям расти к зрелости (см. Диаграмму B).Наша церковь выделяет четыре фазы духовного развития: ищущий, верующий, последователь и лидер. Я считаю, что задача воспитателя учеников — помочь людям оценить их текущую фазу развития и дать им возможность сделать следующий шаг.
Честная оценка важна для здорового роста. Установка флажков рядом с практиками на каждом этапе была гораздо полезнее, чем определения. Люди склонны переоценивать свой прогресс. Например, мы считаем, что невозможно быть последователем, не читая регулярно Библию.Деятельность не гарантирует духовной зрелости, но ее отсутствие является хорошим показателем степени зрелости человека.
После определения фаз зрелости вы начинаете решать, какой опыт вы будете использовать на каждой фазе, чтобы подготовить людей к следующему шагу. Например, программа «Сделанные последователи» дает верующим возможность стать активными последователями. Leaders Made помогает последователям стать духовными влиятельными лицами.
Когда я впервые приехал в нашу церковь, подавляющее большинство наших людей застряли в фазе веры.Мы были великолепны в достижении заблудших. К сожалению, мы одинаково хорошо умели терять находки. Отсутствие подготовки к продвинутому духовному образованию мешало дальнейшему развитию. Добавление этого опыта привело к тому, что сотни верующих стали движимыми Духом миссионерами дома, на работе и на отдыхе. Если вы заинтересованы в использовании этих готовых решений, посетите веб-сайт schemelesmade.com.
3. Disciple Disciple-Makers
Иисус лично не учил сотни людей.Вместо этого Иисус сделал учениками горстку людей, которые присоединились к Нему в построении движения ученика. Я считаю, что следовать примеру Иисуса очень важно. Как это переводится в современное ученичество?
Движение ученичества в Вестсайде [Семейная церковь] началось с одного ключевого решения: я перестал возглавлять небольшую группу. В течение четырех лет я руководил только группами продвинутого ученичества, которые были заполнены только людьми, которые руководили небольшими группами.
Сделать этот переход было простым решением, но осуществить переход было сложно.Я забочусь о людях. Я люблю инвестировать в их жизнь. Однако я обнаружил, что прямое инвестирование в 10 лидеров косвенно означает вложение в 100 человек. В это трудно поверить, но с тех пор, как я совершил этот переход, я лично выработал 100 лидеров. Поскольку многие из этих лидеров сами стали лидерами лидеров, косвенное прикосновение достигло тысяч. Я никогда не проводил больше трех или четырех часов в неделю, руководя этими группами. Умножение может произойти, когда вы больше не являетесь своей системой воспитания учеников.
4. Следуй за Иисусом вместо формулы
Доступно множество формул для малых групп и ученичества. Я многому у них научился. Однако ничто не повлияло на наш процесс больше, чем пошаговое руководство Иисуса. Моим первым шагом после того, как я столкнулся с жестокими фактами, было признаться Иисусу в том, что я не способен развить необходимую систему ученичества. Я обязался сделать любой шаг, который Он сказал мне сделать, чтобы построить его. Послушание, а не интеллект, построило нашу систему подготовки учеников.
5. Станьте учеником, прежде чем пытаться подготавливать учеников
Вы можете воспроизвести только то, что вы есть. Ученики регулярно слышат от Бога через регулярное чтение Библии, ведение дневника, молитву и ответственность. Ученики регулярно оттачивают свои духовные дары во славу Бога. Если вы попытаетесь быть наставником, не будучи учеником, вы разочаруете себя и тех, кого связываете, чтобы вести.
Будь смелым! Иисус повелел нам подготавливать учеников. Иисус дал нам Свой Дух, чтобы дать нам силы делать это.Он дал нам Свою власть осуществить это. Опирайтесь на Его Дух. Утверждайте Его власть. Подчиняйтесь Его команде. Создайте в своей церкви систему подготовки учеников.
Брайан Фиппс служит пастором семейной церкви Вестсайда в качестве пастора «Следующие шаги», принося сильное лидерство и вкладывая средства в отстаивание духовного роста нашего собрания. Брайан имеет опыт основателя церквей, старшего пастора и пастора ученических и малых групп. Он получил степень бакалавра религии в Университете Южной Каролины, а также степень магистра богословия и М.А. в консультировании реформатской теологической семинарии в Орландо. У него и его жены Кэрол трое замечательных детей: Ханна, Сэмми и Калеб.
Характеристика микробиома и транскриптома дренажа кислых пород на участке Ely Copper Mine Superfund
Abstract
Микробное окисление сульфидов металлов играет важную роль в образовании дренажа кислых пород (ARD). Мы стремились широко охарактеризовать ARD в Ely Brook, который осушает участок Ely Copper Mine Superfund в Вермонте, США, используя метагеномику и метатранскриптомику для оценки метаболического потенциала и сезонной экологической роли микроорганизмов в воде и отложениях.Используя центрифугу против базы данных NCBI «nt», ~ 25% считываний в пробах донных отложений и воды были классифицированы как кислотоустойчивые Proteobacteria (61 ± 4%), принадлежащие к родам Pseudomonas (2,6–3,3%), Bradyrhizobium (1,7–4,1%) и Streptomyces (2,9–5,0%). Многие гены (12%) по-разному экспрессировались в зависимости от сезона и играли важную роль в круговороте железа, серы, углерода и азота. Наиболее распространенный РНК-транскрипт кодировал белок множественной лекарственной устойчивости Stp, а наиболее выраженные транскрипты, аннотированные KEGG, участвовали в метаболизме аминокислот.Кластеры биосинтетических генов, участвующие во вторичном метаболизме (BGC, 449), а также гены металлов (133) и устойчивости к антибиотикам (8501) были идентифицированы по всему набору данных. Несколько генов устойчивости к антибиотикам и металлам были совместно локализованы и коэкспрессированы с предполагаемыми BGC, что позволило понять защитную роль молекул, производимых BGC. Наше исследование показывает, что экологические стимулы, такие как концентрация металлов и сезонные колебания, могут побуждать таксоны ARD к производству новых биоактивных метаболитов.
Введение
В течение 19 -х и 20 -х веков горнодобывающая промышленность эксплуатировала медный пояс Вермонта в округе Ориндж (), после чего несколько медных рудников были заброшены и оставлены для накопления дренажа кислых пород (ARD) [1 ]. ARD — это сток кислой воды из горнодобывающих районов, содержащих породы, богатые сульфидами металлов. Когда сульфиды металлов подвергаются воздействию воды и кислорода, образуются ионы гидроксония и сульфат, снижающие pH воды. Токсичные уровни Cu, Fe, Zn и Pb, выщелачиваемые из богатых пирротином сульфидных месторождений типа Бесши [2], отрицательно сказались на качестве воды и водном биоразнообразии в медном поясе [3].Этот процесс дополнительно ускоряется присутствием ацидофильных, серных и / или железоокисляющих бактерий, которые быстро превращают нерастворимые сульфиды в растворимые сульфат-ионы и Fe 2+ в Fe 3+ , преобладающую растворимую форму железа кислый pH. Из-за загрязнения местных водотоков металлами и кислой водой, шахты в этом регионе были включены Агентством по охране окружающей среды (EPA) в Национальный список приоритетов Суперфонда.
Медный пояс Vermont.Карта рудника Элизабет, Медного рудника Эли и Медного рудника Пайк-Хилл (отмечена звездами) [4].Кружками обозначены близлежащие города, а место проведения исследований Эли Брук (EB-90M) обозначено красной стрелкой. На изображениях справа показан участок исследования EB-90M 28 июля -го , 2017 и 14 января -го , 2018.
Микроорганизмы в загрязненной металлами среде развивают уникальные гены, придающие устойчивость к тяжелым металлам [5, 6] и / или антибиотики [7–9] для поддержания клеточного гомеостаза. Гены устойчивости к металлам (MRG), некоторые из которых устойчивы к антибиотикам на основе сходных механизмов действия [8], могут индуцировать биосинтез вторичных метаболитов для поглощения металлов.Например, Cupriavidus Metallidurans , первоначально выделенный из промышленного ила [10], устойчив как к тяжелым металлам, так и к антибиотикам, а также экспрессирует кластеры биосинтетических генов (BGC), участвующие в производстве различных вторичных метаболитов, включая Fe 3+. -связывающий стафилоферрин В [11, 12]. Несколько биоактивных микробных природных продуктов были выделены из горнодобывающей среды [13], таких как беркелейлактон, сильнодействующие грибковые антибиотики, выделенные из богатой медью ямы Беркли в Бьютте, штат Монтана [14].MRG и гены устойчивости к антибиотикам также были идентифицированы в кластерах биосинтетических генов (BGC), предназначенных для вторичного метаболизма [15]. Таким образом, совместная кластеризация этих генов устойчивости может быть использована для биоразведки загрязненной металлами окружающей среды на предмет новых вторичных метаболитов и понимания факторов стресса, запускающих их производство, обеспечивая понимание их биоактивности.
Чтобы оценить способность ARD производить биоактивные вторичные метаболиты, мы охарактеризовали воду и отложения, связанные с ARD, на медном руднике Ely Copper Mine, принадлежащем Superfund.И вода, и отложения в этой шахте подверглись воздействию ARD (pH> 3) и высоким концентрациям металлов (например, до 1560 мкг / л Cu) [3]. В 2010 г. концентрации растворенной меди в воде и отложениях на медном руднике Эли превысили критерии здоровья водной среды в 45–222 и 7–40 раз, соответственно [3]. Таким образом, мы взяли пробы воды и донных отложений в ручье Эли, месте слияния чистой воды и вышележащих притоков, истощающих шахту [3], и использовали метагеномику дробовика и метатранскриптомику, чтобы охарактеризовать микробиом ARD, включая структуру и разнообразие сообществ, а также задействованные гены. во вторичном метаболизме, а также устойчивости к тяжелым металлам и антибиотикам.
Участки дренирования кислых пород, богатые медными хвостами, обычно населены ацидофильными микроорганизмами, окисляющими железо и серу, такими как виды Leptospirillum , Acidithiobacillus , Acidiphilium и Thiobacillus [16–18]. Основываясь на высокой кислотности и концентрациях металлов в ручье Эли [3], мы предположили, что аналогичные виды будут доминировать в ручье Эли. В этом исследовании мы стремились: 1) описать ацидофильных, окисляющих железо и серу хемолитоавтотрофов и гетеротрофов, которые, вероятно, доминируют в воде и отложениях в Эли-Брук, и 2) связать микробиом с активно экспрессируемыми генами, особенно теми, которые участвуют в транспорте металлов и производство биоактивных вторичных метаболитов в этой богатой металлами экстремальной среде.Образцы собирались летом и зимой, чтобы определить сезонные различия, которые влияют на динамику сообщества, а также на то, как стимулы окружающей среды влияют на экспрессию генов. Эта работа представляет собой первое метагеномное и метатранскриптомическое исследование микробиома кислой породы в пределах медного пояса Вермонта.
Материалы и методы
Место исследования и сбор образцов
28 июля -е , 2017 и 14 января -е , 2018, Эли-Брук (43 ° 55’9 ”северной широты, 72 ° 17’11” западной долготы) В 90 м выше устья ручья (ЕВ-90М) отбирали вместе с ненасыщенными наносами (глубиной 10 см) с берега.Пять образцов воды в EB-90M были профильтрованы через 0,22 мкм полиэтиленсульфоновые фильтры Sterivex-GP (MilliporeSigma; Сент-Луис, Миссури) с использованием варистальтического насоса для сбора ДНК для секвенирования и заморожены на сухом льду. Дополнительные пробы воды были собраны в аппаратах HPDE Packers (Thermofisher; Waltham, MA), а часть была отфильтрована и / или консервирована либо серной кислотой (для анализа органического углерода), либо азотной кислотой (для элементного анализа). Три образца осадка были также собраны в стерильные контейнеры и заморожены на сухом льду для экстракции РНК и ДНК.Осадок также собирался для элементного анализа, а физико-химические свойства образцов анализировались на месте или в лаборатории. Всего в июле и январе было отобрано 16 проб. См. Вспомогательную информацию (данные S1).
Экстракция ДНК и РНК, построение библиотеки, метагеномное и метатранскриптомное секвенирование
ДНКэкстрагировали из воды (≥1 л) и образцов осадка (0,25 г) с использованием наборов DNeasy PowerWater Sterivex ® и PowerSoil ® для выделения ДНК ( Mo Bio Laboratories, Inc.; Carlsbad, CA) в соответствии с инструкциями производителя. РНК экстрагировали из осадка (2,0 г) с использованием набора для выделения общей РНК RNeasy PowerSoil ® (Mo Bio Laboratories, Inc.; Карлсбад, Калифорния). Подготовка библиотеки и секвенирование были выполнены в Университете Иллинойса в Чикагском центре секвенирования (UICSQC). Подробную информацию об извлечении нуклеотидов и подготовке библиотеки, секвенировании и оценке качества можно найти во вспомогательной информации. Секвенирование библиотек ДНК и РНК проводили на высокопроизводительных наборах Illumina NextSeq500 и NextSeq500, соответственно, с считыванием парных концевых 150 оснований.
Таксономическая аннотация и количественная оценка
Считываний были сопоставлены с базой данных нуклеотидов NCBI (nt) с помощью центрифуги [19] с использованием нуклеотида BLAST (v2.2.29 +), сохраняя выравнивания не менее 500 п.н. и значение E <10 — 4 [20, 21]. Таксономические аннотации для каждого фрагмента ДНК (пара считывания) были получены и суммированы по всем парам считывания для создания подсчетов на таксон. Алгоритм наименьшего общего предка (LCA) компании MEGAN (то есть инструмент blast2lca) [22] использовался для определения таксономической аннотации для каждой пары считывания, а таксономические сводки были созданы от суперкарлинга до уровней видов.Исходные подсчеты были нормализованы к дробным подсчетам относительной численности.
Дифференциальный анализ микробных таксономических сводок
Для оценки сезонных микробных различий таксономические сводки были разделены на следующие суперкоролевства (sk) и царства (k), соответственно: sk_Bacteria, sk_Archaea и k_Fungi. Редкие или редкие таксоны с общим числом последовательностей <1000 во всех образцах и десятью счетами в по крайней мере трех образцах были отфильтрованы из каждой таблицы «для конкретного царства». Перед фильтрацией данные были нормализованы к общему количеству последовательностей, а дифференциальный анализ каждой таксономической сводки проводился отдельно в edgeR [23].Дифференциальная статистика (log 2 кратных изменений и p-значений) была рассчитана для каждого таксона, сравнивая сезон и тип выборки отдельно, используя необработанные подсчеты из таксономической аннотации и количественной оценки. Во всех случаях p-значения были скорректированы для множественного тестирования с использованием поправки на коэффициент ложного обнаружения (FDR) (q-значения) Бенджамини и Хохберга [24].
Метагеномная сборка и аннотация открытых рамок считывания
Метагеномная сборка была выполнена с использованием ассемблера Spades v3.11.1 [25] на необработанных данных Illumina считывает все образцы ДНК с указанным параметром множественной метагеномики «—мета». Если не указано иное, использовались параметры по умолчанию. Уровни покрытия оценивались путем сопоставления необработанных считываний Illumina с контигами с помощью BWA-MEM v0.7.15 [26] с использованием параметров по умолчанию и вычисления покрытия как числа выравниваемых считываний на контиг, умноженного на длину каждого считывания, деленную на длину контига. . Контиги были отфильтрованы так, чтобы иметь минимальную длину 1000 п.н., содержащие неповторяющиеся последовательности (энтропия Шеннона с двумя основаниями> 0.85), а также покрытие больше нуля (0) от независимого выравнивания необработанных чтений. Предполагаемая таксономическая аннотация была выполнена с использованием локального поиска blastn, v2.2.29 +, с параметрами по умолчанию для NCBI «nt», сохраняя выравнивания не менее 500 п.н. и значение E <10 -4 [20, 21]. Затем результаты анализа BLAST были обобщены с помощью инструмента blast2lca от MEGAN [22] с использованием параметров по умолчанию.
Prokka [27] был использован для обнаружения и аннотирования функциональных генов / открытых рамок считывания (ORF), присутствующих в контигах, с использованием параметра наиболее доминирующего царства, «бактерий».Полученный файл характеристик гена позже использовался при количественной оценке экспрессии гена. Предсказанная аминокислотная последовательность для каждой открытой рамки считывания была использована для определения аннотаций ортологии Киотской энциклопедии генов и геномов (KEGG) (www.kegg.jp) [28, 29]. Прогнозируемые аминокислотные последовательности искали в базе данных Swiss-Prot [30] с использованием DIAMOND в режиме blastp [31]. KO-аннотации были определены для каждой прогнозируемой ORF консенсусным способом (т.е. согласование> 50% совпадающих ссылок) с использованием KOs, указанных в базе данных отображения идентификаторов Uniprot [32].Сводки KEGG более высокого уровня были также созданы для аннотаций путей и модулей KEGG, а также для уровней 1–3 BRITE.
Количественная оценка экспрессии ORF
Активная экспрессия гена в осадке была определена количественно путем сравнения количества транскриптов РНК по отношению к количеству ДНК из метагеномной сборки. Количественная информация для ORF, аннотированных Prokka, была определена путем сопоставления исходных считываний Illumina образцов ДНК и РНК с контигами с помощью BWA-MEM v0.7.15 [26] с использованием параметров по умолчанию -k 19, -w 100, -d 100, — г 1.5, -y 20, -c 500, -D 0.50, -W 0 и -m 50. Необработанные подсчеты чтения (т. Е. Уровни экспрессии) каждой ORF в каждом образце были количественно определены с использованием FeatureCounts [33] с использованием параметров по умолчанию, и файл характеристик гена (GFF) был создан во время аннотации контигов через Prokka. Гены были отфильтрованы, чтобы сохранить те, которые имели в общей сложности 100 отсчетов во всех образцах и имели не менее 10 отсчетов в трех или более образцах. Данные были нормализованы с использованием нормализации количества отсчетов на миллион с общим выровненным количеством отсчетов для каждого образца в качестве размера образца.
Что касается анализов KO, нормализованные подсчеты для каждого аннотированного KO были суммированы по всем аннотированным ORF, принадлежащим конкретному пути, модулю или категории BRITE. Сначала данные были отфильтрованы, чтобы сохранить отдельные KO с общим количеством ≥100 отсчетов по всем образцам и десятью отсчетами по крайней мере в трех образцах. Сводки по путям, модулям и BRITE были впоследствии отфильтрованы, чтобы иметь в общей сложности ≥1000 отсчетов последовательностей во всех образцах и десять отсчетов как минимум в трех образцах. Данные подсчета нокаутов были нормализованы с использованием количества отсчетов на миллион с общим выровненным отсчетом для каждого образца в качестве размера образца.
Статистическое сравнение микробных сообществ, ДНК и РНК
Альфа-разнообразие таксономических результатов, основанных на чтении, было оценено с помощью индекса разнообразия Шеннона [34] путем 1) уточнения таблиц для конкретных королевств до глубины на основе общего подсчета последовательностей, 2 ) создание таксономических обзоров для каждой таблицы с разреженными данными / подвыборками; 3) оценка каждого отчета отдельно; 4) проверка статистически значимых различий с помощью теста Краскела-Уоллиса [35]. Бета-разнообразие оценивали с помощью меры несходства Брея-Кертиса [36] с использованием параметров по умолчанию в R в веганской библиотеке [37].Перед анализом данные были преобразованы в log 10 (x + 1), и полученные индексы несходства были смоделированы и проверены на значимость сезона с использованием теста Адониса. Тепловые карты и иерархические кластеры были созданы в Partek Flow v8.0 с использованием следующего, соответственно: 1) нормализованного количества таксонов из метагенома и предсказанных открытых рамок считывания (ORF) по образцам и 2) индекса евклидова несходства и метода среднего связывания с сгруппируйте аналогичные паттерны экспрессии и численность таксонов.
Дифференциальный анализ данных экспрессии ORF
Статистические данные дифференциальной экспрессии (log 2 кратных изменений и p-значений) были вычислены для каждой ORF, аннотированной Prokka [27], Киотская энциклопедия генов и геномов (KEGG [28]; www.kegg.jp) и ортологию KEGG (KO) с использованием нормализованных данных подсчета ДНК (численность) и РНК (экспрессия) в осадках из каждой таксономической группы (т. е. бактерий, архей и грибов). Используя edgeR [38], данные выражения были подогнаны к линейной модели, предполагая отрицательное биномиальное распределение, которое включало сезон (т.е., зима по сравнению с летом), тип молекулы (т.е. РНК по сравнению с ДНК), а также взаимодействие сезона и типа молекулы (р-взаимодействие). Значимость определялась путем проведения парных сравнительных тестов сезона в пределах каждого типа данных и между ними, а значения p были скорректированы FDR [24]. P-взаимодействие ≤ 0,05 указывает на значительную дифференциальную экспрессию генов между сезонами, основанную на взаимодействии сезона и данных подсчета типов молекул, а не только на изменении сезона или типа молекулы. Затем данные были дополнительно отфильтрованы по скорректированному FDR-значению (значение РНК q-зима / лето) ≤ 0.05 связано с разницей между зимним и летним уровнями транскриптов РНК.
Увеличение или уменьшение количества транскриптов по сравнению с таксономически неаннотированной ДНК считалось дифференциально распространенным зимой или летом, соответственно, при соблюдении следующих критериев: значение p-взаимодействия было ≤0,05 с последующим q-winter / летнее значение РНК ≤ 0,05. Мы также определили дифференциальную экспрессию КО как увеличение или уменьшение экспрессии функции ортологичного гена по сравнению с количественным подсчетом последовательностей для соответствующих ортологов в зимних или летних образцах ДНК, соответственно, так что p-сезон ≤ 0.05. Строгое попарное значение p не использовалось в этом случае, чтобы получить представление об экспрессии генов всех путей KEGG. Однако значимо дифференциально экспрессируемые КО соответствовали следующим критериям: p-взаимодействие ≤ 0,05 в сочетании с q-зимней / летней РНК ≤ 0,05, соответственно.
Анализ генов, участвующих в биосинтезе природных продуктов, устойчивости к металлам и устойчивости к антибиотикам
Контиги были добыты для кластеров генов биосинтеза вторичных метаболитов (BGC) в бактериальной и грибковой версии antiSMASH 5.0 [39]. Для идентификации BGC использовались параметры по умолчанию и следующие функции: взрыв известного кластера, взрыв подкластера и средство поиска активных сайтов. Затем аннотированные BGC были отфильтрованы таким образом, чтобы было всего ≥100 отсчетов во всех выборках и ≥10 отсчетов как минимум в трех образцах. Необработанные подсчеты, соответствующие Prokka-аннотированным ORF относительно таковых для ДНК, затем фильтровали для определения дифференциальной экспрессии генов, так что р-взаимодействие с последующей q-зимней / летней РНК ≤ 0,05. База данных BacMet использовалась для добычи ДНК и РНК для экспериментально подтвержденных генов устойчивости к металлам (MRG) [40].Необработанные подсчеты ORF фильтровали таким же образом, как и BGC. Графики градиента были созданы в Partek Flow v8.0 для дифференциально экспрессируемых BGC и тех, которые совместно экспрессируются с MRG. Контиги также были добыты для генов устойчивости к антибиотикам, которые были в непосредственной близости или совместно локализованы с BGC, с использованием Antibiotic Resistant Target Seeker (ARTS) версии 2 [41] с использованием параметров по умолчанию. Были отобраны дублирование и близость БЦЖ, скрины моделей устойчивости и геномы, сопоставленные со следующими типами: актинобактерии и альфапротеобактерии.
Обмен данными и номера доступа нуклеотидов
Необработанные данные последовательности и файлы метаданных были представлены в Архиве чтения последовательностей Национального центра биотехнологической информации (идентификатор BioProject, PRJNA540505). Необработанные данные, использованные для всех анализов, были депонированы в Figshare; DOI: 10.6084 / m9.figshare.c.4864863. URL– https://doi.org/10.6084/m9.figshare.c.4864863). См. Ссылку [42] для дополнительного анализа данных.
Результаты и обсуждение
Физико-химические характеристики
Физико-химические свойства всех образцов менялись в зависимости от сезона (таблица S1).Температура воды составляла -0,36 ° C в январе (зимой) и 16,4 ° C в июле (летом) при pH 3,86 и 3,59 соответственно. PH осадка был в пределах pH воды, но был более кислым зимой (pH 3,56), чем летом (pH 3,78), возможно, из-за того, как отложения накапливали протоны [43], снижая скорость их диссоциации. Несмотря на то, что среди образцов из разных сезонов были разные значения pH, необходимо собрать больше данных, чтобы оценить значимость этой разницы. Были измерены высокие окислительно-восстановительные потенциалы (423–451 мВ), что указывает на окисление воды EB-90M (в аэробных средах окислительно-восстановительные потенциалы ≥-100 мВ; [44]).Уровни сульфата в воде (95–126 мг / л) были в пределах рекомендованных EPA концентраций (<250 мг / л) и соответствовали предыдущим геологическим исследованиям Ely Brook [3], но ниже, чем те, о которых сообщалось в других исследованиях ARD [45]. Большинство питательных веществ, включая нитраты и нитриты (<0,02 мг / л), общий азот по Кьельдалю (<0,7 мг / л), а также химически активный и общий фосфор (<0,15 мг / л) в воде были ниже предела обнаружения. Низкие уровни общего и растворенного органического углерода (1,4–3,1 мг / л) также были обнаружены в воде, что характерно для ARD из-за конкуренции между видами и неспособности окружающей среды удерживать питательные вещества [46, 47].
Высокие концентрации металлов были обнаружены во всех пробах EB-90M. Самыми распространенными элементами в воде были Mg, Al и Fe (3,07–5,89 мг / л;), а количество общих и растворенных элементов было одинаковым во всех пробах воды. Кремнезем (SiO 2 , 49%), Fe 2 O 3 (27%) и Al 2 O 3 (13%) были основными компонентами осадка (), что также подтверждается по высоким уровням Si, Al и Fe, обнаруженным с помощью ICAP-MS (). Весовой процент Fe и Al увеличился на 17% и 4%, соответственно, с тех пор, как Агентство по охране окружающей среды в последний раз проанализировало геохимические свойства донных отложений EB-90M в 2006 г. [4, 48], подчеркивая долгосрочное пагубное воздействие ARD на -рекомендованные сайты.
Таблица 1
Химический состав образцов.
| Образец | Na | Mg | Al | Cr | Mn | Fe | Co | Ni | Cu | 5 Zn C 9085 CSb | |||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Июльская вода (D) | 1,73 (0,04) | 4,17 (0,08) | 4,93 (0.12) | <0,01 | 0,404 (0,003) | 5,22 (0,15) | 0,0882 (0,0022) | 0,0243 (0,0002) | 1,85 (0,01) | 0,369 (0,006) | <0,01 | <0,01 | 0,0170 (0,0002) | <0,01 | <0,01 | ||||||||||||||||||
| Июльская вода (T) | 1,76 (0,02) | 4,24 (0,08) | 5,03 (0,05) | <0,01 | 30,40 (0,004) | 5,62 (0.06) | 0,0918 (0,0010) | 0,0253 (0,0003) | 1,87 (0,02) | 0,360 (0,003) | <0,01 | <0,01 | 0,0172 (0,0002) | <0,01 | <0,01 | ||||||||||||||||||
| Январская вода (D) | 1,33 (0,01) | 3,19 (0,02) | 4,31 (0,25) | <0,01 | 0,286 (0,001) | 5,80 (0,01) | 0,101 (0,001) | 0,0230 (0,0002) | 2.27 (0,01) | 0,321 (0,004) | <0,01 | <0,01 | 0,0119 (0,0002) | <0,01 | <0,01 | ||||||||||||||||||
| Январская вода (T) | 1,31 (0,02) | 3,07 (0,06) | 4,33 (0,08) | <0,01 | 0,278 (0,003) | 5,89 (0,08) | 0,0982 (0,0014) | 0,0223 (0,0004) | 2,22 (0,00) | 0,305 (0,004) ) | <0,01 | <0.01 | 0,0113 (0,0001) | <0,01 | <0,01 | ||||||||||||||||||
| Июльский осадок | 14,3 × 10 3 * | 11,3 × 10 3 * | 66,1 × 10 3 * | 66,1 × 10 3 * | 66,1 × 10 3 * | 137 (1) | 908 *194 × 10 3 * | 20,2 (0,2) | 28,5 (0,3) | 2,21 × 10 3 (26) | 323 (5) | 2,99 (0,21) | 0,195 (0,027) | 471 (1) | 54.6 (0,2) | 4,23 (0,09) | |||||||||||||||||
| Январский осадок | 17,4 × 10 3 * | 10,7 × 10 3 * | 64,3 × 10 3 * | 118 (3 ) | 1,04 × 10 3 * | 181 × 10 3 * | 15,2 (0,2) | 25,6 (0,6) | 1,90 × 10 3 (32) | 609 (10) | 2,44 (0,38) | 0,211 (0,045) | 806 (4) | 52.9 (0,3) | 6,49 (0,65) |
Таблица 2
Химический состав осадка EB-90M в массовых процентах.
| Химический состав, мас.% (Мг / кг) | Летний осадок | Зимний осадок |
|---|---|---|
| Na 2 O | 1,88 (14,3 × 10 3 Na) | (17,4 × 10 3 Na) |
| MgO | 1,98 (11.3 × 10 3 мг) | 1,85 (10,7 × 10 3 мг) |
| Al 2 O 3 | 12,9 (66,1 × 10 3 Al) | 12,2 (64,3 × 10 3 Al) |
| SiO 2 | 48,0 (230 × 10 3 Si) | 51,7 (241 × 10 3 Si) |
| P 2 O 5 | 0,156 (697 P) | 0,168 (748 P) |
| K 2 O | 2.17 (17,5 × 10 3 K) | 2,25 (18,7 × 10 3 K) |
| CaO | 1,56 (122 × 10 3 Ca) | 1,93 (137 × 10 3 Ca ) |
| TiO 2 | 0,763 (4,68 × 10 3 Ti) | 0,803 (4,87 × 10 3 Ti) |
| MnO | 0,0870 (852 Mn) | 0,132 (1,0 × 10 3 Mn) |
| Fe 2 O 3 | 28.4 (194 × 10 3 Fe) | 26,0 (181 × 10 3 Fe) |
Разнообразие и состав микробного сообщества
Примерно 25% парных считываний из 11 из 16 образцов (S2 Table) были таксономически аннотированы с помощью Centrifuge, и 141 тип [42], включая типы кандидатов, был обнаружен во всех доменах. Данные из проб зимней воды были исключены, так как охват секвенированием был значительно ниже из-за низкого выхода ДНК. Все данные таксономической аннотации от Centrifuge доступны по адресу https: // doi.org / 10.6084 / m9.figshare.c.4864863 (FigShare 1). Из аннотированных таксонов бактерий доминировали во всем сообществе EB-90M, за ними следовали Eukaryota и Archaea (), соответственно, а также были обнаружены вирусы. Протеобактерии (50 ± 4%) были наиболее доминирующим филумом, за ним следуют актинобактерии (19 ± 4%), Chordata (7,6 ± 0,2%), неклассифицированные последовательности (19 ± 2%) и Streptophyta (3,4 ± 1%). Если рассматривать только микроорганизмы, Proteobacteria представляли 61 ± 4% сообщества, за которым следовали 23 ± 3% Actinobacteria ().Протеобактерии обычно доминируют над ARD [49, 50] из-за их метаболической пластичности [51], и они включают окислители железа и серы, которые растут в богатых металлами и менее ограничительных условиях pH. Аналогичным образом, актинобактерии были зарегистрированы в других средах ARD, включая 90 микробных сообществ в медных хвостохранилищах в провинции Аньхой, Китай [50, 52, 53]. И протеобактерии, и актинобактерии процветают в различных отложениях и выработали механизмы обитания в богатой металлами среде [54].
Таксономическая аннотация.Сезонный профиль A) всех типов и B) микробных типов по всем образцам в EB-90M. Таксоны помечаются суперкольцом, за которым следует тип. «Другой» представляет типы, которые составляют менее 2% и 1% процентов данных для всех организмов и микроорганизмов, соответственно.
Показатели разнообразия Шеннона (H) таксонов были сходными для видов бактерий (H = 6,8–7,0), архей (H = 4,0–4,9) и грибов (H = 5,4–5,5) независимо от типа образца (S3 – S5). Таблицы) и указали на большее бактериальное разнообразие.Бета-разнообразие бактерий, архей и эукариот в образцах было значительным между летней водой и осадками (p <0,05). Однако не было значительных различий между отложениями из разных сезонов (таблицы S6 – S8). Неметрические графики многомерного масштабирования (NMDS) и анализ главных компонентов (PCA) ДНК в воде и отложениях также не показали четких различий на уровне родов между таксонами в зимних и летних отложениях [42]. Сезон объяснил 66–92% различий видов в отложениях, но значение p было равно 0.1 с альфа-уровнем 0,05 (таблицы S6 – S8). Таким образом, необходимо проанализировать больше образцов, чтобы подтвердить это несходство, поскольку сезон может влиять на таксономическое разнообразие ARD из-за изменений температуры, pH и концентраций металлов [55–57]. Тем не менее, бета-разнообразие организмов в летних отложениях и воде различается на всех таксономических уровнях (p <0,05) с большим разбросом (70–87%) в зависимости от типа образца (таблицы S9 – S11).
Pseudomonas (2,6–3,3%), Bradyrhizobium (1.7–4,1%) и Streptomyces (2,9–5,0%) были наиболее аннотированными родами микробов во всех выборках (). Хотя это и не согласуется с нашей гипотезой, кислотоустойчивые бактерии этих родов были изолированы из других шахт [17, 58–64], производя питательные вещества и опосредуя поток ионов металлов [65, 66]. Виды Leptospirillum , Acidithiobacillus , Acidiphilium и Thiobacillus также присутствовали в метагеноме, но в значительно меньшей численности (<0.7%). Учитывая, что не все чтения с парными концами были таксономически аннотированы, другие окислители серы и железа могут доминировать на этом сайте.
Сезонное микробное разнообразие.Относительная численность наиболее массовых родов архей (первые двенадцать), микробных эукариот (верхние одиннадцать) и вироидов / вирусов (верхние одиннадцать), а также 24 наиболее массовых родов бактерий на образец. Наиболее многочисленные таксоны в образце варьировались внутри каждой группы (археи, эукариоты, вироиды / вирусы и бактерии). Красный и синий обозначают соответственно высокую и низкую численность.Incertae sedis соответствует таксономической группе с неизвестными более широкими связями с другими таксонами.
Обилие большинства микроорганизмов в разные сезоны было разным. Например, из 1177 аннотированных родов бактерий 660 дифференциально представлены между сезонами (p-сезон <0,05). Данные для дифференциального анализа аннотированных бактерий, архей и грибов доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 2). Bradyrhizobium , азотфиксирующие эндофиты растений, были немного более многочисленными летом независимо от типа выборки (p-сезон <0.05). Археи также присутствовали, но в меньшем количестве, так как Euryarchaeota составляла 1,3 ± 0,03% наблюдаемых микробных типов (). Эвриархеи также были обнаружены в небольшом количестве в медном карьере Байинь в Китае [18]. Самым распространенным видом архей был « Candidatus Nitrosotalea», ацидофил, участвующий в нитрификации, окисляя аммиак до нитрита в кислых осадках [67]. Этот род также был более распространен летом независимо от типа выборки (). Из 93 аннотированных родов архей 55 были представлены по-разному между сезонами (p-сезон <0.05).
Chordata были наиболее многочисленным типом эукариот () в метагеноме EB-90M. В эукариотическом микробном сообществе грибы Ascomycota, за которыми следовали Basidiomycota, были наиболее многочисленными типами эукариот (). Наиболее представлены следующие роды: Aspergillus , Rhodotorula и Colletotrichum , причем Rhototorula немного более многочисленны летом (p-сезон <0,05) (). Аскомикоты были обнаружены на участках добычи [68], особенно в биопленках на руднике Ричмонд в Айрон-Маунтин [69–71], где гифы грибов обеспечивают поверхность для прикрепления симбионтов к пиритовым отложениям [72, 73].Кроме того, несколько типов были водорослями, населяющими ARD или богатую металлами среду (например, Bacillariophyta [74], Xanthophyceae [75] и Euglenida [76]). Однако все последующие анализы были сосредоточены на прокариотах и грибах, самой большой популяции одноклеточных эукариот в этом наборе данных. Из 174 идентифицированных родов грибов 89 были представлены по-разному между сезонами (p-сезон <0,05).
Сезонная метаболическая и функциональная активность таксонов
Помимо сезонных колебаний среди таксонов, на EB-90M наблюдались значительные сезонные различия в экспрессии генов, основанные на относительной численности предсказанных ORF.PCA продемонстрировал однородные, но различные молекулярные фенотипы в зависимости от типа образца (ДНК) и сезона (ORF) [42]. Экспрессию активного гена в осадке количественно оценивали путем сравнения количества ORF, аннотированных Prokka (таблица S12), с количеством ДНК, использованной для сборки метагенома (таблица S13). Все дифференциально выраженные функционально аннотированные данные ORF доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 3). Приблизительно 104 772 из 296 476 генов достоверно дифференциально экспрессировались на основе p-взаимодействия ≤ 0.05. Многие предсказанные ORF (35037) имели значение p-взаимодействия и скорректированное на FDR p-значение (q-зимнее / летнее значение РНК) ≤ 0,05, что указывает на то, что несколько генов по-разному экспрессировались между сезонами, что согласуется с другими ARD. исследования, в которых было обнаружено, что физико-химические свойства влияют на экспрессию генов [77].
Предсказанные функции и относительное количество транскриптов РНК предоставили понимание роли таксонов, поскольку многие контиги не выровнялись с последовательностями NCBI «nt» в нашем конвейере таксономической аннотации на основе сборки.В будущем следует использовать дополнительные таксономические классификаторы для увеличения таксономических аннотаций функционально аннотированных генов. Большинство дифференциально распространенных транскриптов кодируют гипотетические белки. перечисляет первую десятку дифференциально экспрессируемых аннотированных генов между сезонами, а также их продуцирующие таксоны. Эти гены участвовали в метаболизме аминокислот и кофакторов, синтезе белков, транспорте, вирулентности [78], гомеостазе / организации клеточной стенки, метаболизме нуклеотидов, углеводов и липидов, передаче сигналов клеток и транскрипции, которые важны для выживания и, как сообщалось, в ARD [45, 49, 79].Интересно, что comEC , ген, участвующий в горизонтальном переносе генов (HGT), сильно экспрессировался зимой. ГПГ или поглощение ДНК через клеточные мембраны участвует в эволюции и адаптации видов, что в значительной степени определяется окружающей средой и составом сообщества [80] и, вероятно, играет важную роль в адаптации к этой суровой среде. Кроме того, большинство генов экспрессируется видами Bradyrhizobium , Streptomyces , Aromatoleum , Methylococcus и « Candidatus Solibacter», которые являются обычными для загрязненных сред [81–84].Самым распространенным геном во всем наборе данных, особенно зимой, был stp , кодирующий отток спектиномицин-тетрациклинового насоса, принадлежащий к суперсемейству основных фасилитаторов [85], который, как сообщается, экспрессируется в сточных водах Acidimicrobium [86]. Оттокные насосы способствуют детоксикации и гомеостазу клеток, и их экспрессия может быть запущена ионами тяжелых металлов, которых много в EB-90M (Таблицы и) [87, 88].
Таблица 3
Сезонная экспрессия генов.
| Функция белка, ген | Биологический процесс | Организм | ||
|---|---|---|---|---|
| Зима с высокой степенью экспрессии | ||||
| Трегалогидлоза / трегалоза 5905 биосинтез, вирулентность | Aromatoleum aromaticum | |||
| тРНК-2-метилтио- N (6) -диметилаллиладенозинсинтаза, miaB | ТРНК метилирование | Устойчивость к антибиотикам | Methylococcus capsulatus | |
| Белок множественной лекарственной устойчивости, stp | Регуляция EF-tu, вирулентности, синтеза клеточной стенки и множественной лекарственной устойчивости | Acidimicrobium 900P27 X33890 d. пир офосфатаза, rdgB | Катаболизм пуриновых нуклеозидов | |
| Токсин, fitB | Вирулентность, стрессовая реакция | |||
| Энамидаза Ena 33 Ena izium катаболизмS23321 | ||||
| Белок оперона ComE, comEC | Компетентность для трансформации | |||
| Предполагаемая сахарная трансфераза, epsL | Организация клеточной стенки | |||
| Сенсор гистидин тинмо-сенсор Двухкомпонентная регуляторная система | ||||
| Недоэкспрессируется зимой | ||||
| Лейцин-, изолейцин-, валин-, треонин- и аланин-связывающий белок, braC | Транспорт аминокислот | |||
| 6-оксоциклогекс-1-ен-1-карбонил-КоА гидролаза, bamA | Бензоил-КоА катаболизм | |||
| Предполагаемая фосфосерин фосфатаза 2, pspB 900 биосинтез 903 900 биосинтез 900 Белок синтеза коэнзима PQQ, pqqD | Cof актор биосинтеза | |||
| UDP-N-ацетил-D-глюкозамин 6-дегидрогеназа, wbpA | Организация клеточной стенки | |||
| Белок регуляции захвата железа, мех | Регуляция транскрипции Streptomyces avermitilis | |||
| Глицерофосфодиэфирфосфодиэстераза, glpQ | Глицерин и метаболизм липидов | |||
| ABC-транспортер пермеаза, ytrF1533 900-гидротранспортер, ytrF9033, 900-гидротранспортер, 900-гидротранспортер, 900-гидротрансфертер, 900-гидротрансфертер, 900-гидрат, 900 , aroQ | Биосинтез ароматических аминокислот | |||
| Симпортер сукцинат-ацетат / протон, satP | Транспортер захвата ацетата | Candidatus Solibacter usitatus является метагеномом и метатранскриптомом KEGG аннотировал 1 048 574 чтения кодирования белка с помощью КО, обеспечивая понимание экологической и метаболической роли активных таксонов в отложениях.Все аннотационные данные KEGG доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 4). Хотя функция большинства ORF была неизвестна, 442 447 аннотированных ORF были назначены на 6 997 KO, которые затем были назначены на пути KEGG, иерархии BRITE и модули. Справочные карты путей KEGG и справочные иерархии BRITE применимы к любому организму с помощью функциональных ортологов, определяемых числами K, которые могут использоваться для реконструкции путей из явно неполных наборов данных [89].Наиболее многочисленные РНК-транскрипты участвовали в иерархии и метаболизме BRITE [42]. Было идентифицировано четыреста пятнадцать метаболических путей, которые в основном участвуют в метаболизме углеводов, энергетическом метаболизме и метаболизме аминокислот, подобно ORF, идентифицированным Prokka в отложениях EB-90M, а также в других сайтах ARD [45, 90]. Из 6 997 КО, представляющих аннотированные ORF, 2532 были выражены по-разному между сезонами на основе p-значения, связанного со значимостью сезона (p-сезон) <0.05. Зимой некоторые из наиболее дифференциально экспрессируемых путей KEGG были связаны с перевариванием и абсорбцией белка, а также с биосинтезом феназина [42]. В то время как KOs могут принадлежать нескольким путям, модулям и иерархиям BRITE, большинство дифференциально экспрессируемых KOs были связаны с семействами белков: передачей сигналов и клеточными процессами (BRITE Level 2, 09183). Большинство уровней транскриптов снижалось зимой / повышалось летом, возможно, из-за летних температур, повышающих метаболические потребности сообщества, как показано на модельных биопленках ARD, выращенных при разных температурах [91].Несколько путей, включая те, которые участвуют в метаболизме серы (), азота и углерода (см. FigShare 5-6; https://doi.org/10.6084/m9.figshare.c.4864863), были выражены по-разному (p-season < 0,05) [42]. Экспериментальное исследование этих ортологичных функций и отдельных генов необходимо для подтверждения уровня экспрессии генов в зависимости от сезона. Экспрессия гена метаболизма серы.Схема контрольных путей метаболизма серы KEGG (https: //www.kegg.jp / pathway / map00920) с градацией цвета, выделяющей аннотированную KEGG экспрессию гена, которая меняется от сезона к сезону. Синий и красный цвета обозначают уменьшение и увеличение количества транскриптов РНК зимой соответственно. Гены, которые не изменились, имеют светло-серый цвет, а необнаруженные гены — белые. Значительно дифференциально экспрессируемые гены отмечены звездочкой и соответствуют следующим критериям: p-взаимодействие ≤ 0,05 в сочетании с q-зимней / летней РНК ≤ 0,05 соответственно. Активно экспрессируемые гены, участвующие в круговороте железа и серыВ то время как обычные окислители железа и серы не преобладали над EB-90M, несколько ORF из осадка EB-90M участвовали в круговороте железа и серы.Данные по экспрессии дифференциально экспрессируемых КО, участвующих в метаболизме железа и серы, доступны на https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 7-8). Были идентифицированы КО, связанные с ключевыми генами окисления и восстановления железа, такими как гены cox и mtr . Уникальные ORF (584), сопоставленные с КО, кодирующими генов coxABC (K02274, {«type»: «entrez-нуклеотид», «attrs»: {«text»: «K02275», «term_id»: «188926»}} K02275 , и {«type»: «entrez-нуклеотид», «attrs»: {«text»: «K02276», «term_id»: «188927»}} K02276), участвующие в окислении Fe 2+ , были немного более выражены в зима.Эти данные согласуются с присутствием в осадке восстановителей Fe 3+ , таких как виды Granulicella . Хотя всего 483 транскрипта участвовали в восстановлении Fe 3+ до Fe 2+ , в частности mtrCAB (K03585, K07670 и K07654), KO не экспрессировались дифференциально. Однако аннотированные Prokka ORF mtrCAB дифференциально экспрессировались летом. Некоторые ацидофилы восстанавливают железо в субоксических условиях [92], являются факультативными анаэробами (напр.g., Bradyrhizobium ), или обитают в бескислородных микрозонах в отложениях, где происходит биотическое восстановление Fe 3+ . Несколько организмов участвовали в круговороте серы, процессе, включающем перемещение серы между камнями, водой и организмами. показывает дифференциально экспрессируемые КО, связанные с путем метаболизма серы KEGG. KO (24 из 104) по-разному экспрессировались летом, особенно те, которые участвовали в диссимиляционных путях восстановления сульфата и окисления, таких как aprBA (68 ORF сопоставлены с {«type»: «entrez-нуклеотид», «attrs»: {«text»: «K00394», «term_id»: «209811»}} K00394 и {«type»: «entrez-нуклеотид», «attrs»: {«text»: «K00395», «term_id»: «209811 «}} K00395).Организмы, экспрессирующие эти гены, можно использовать для биоремедиации путем удаления избытка токсичного сульфата из окружающей среды с помощью этого обратимого пути [93]. Диссимиляционные пути генерируют энергию и либо производят сульфиды анаэробно, либо сульфат аэробно, тогда как ассимиляционные пути могут восстанавливать неорганический сульфат до сульфида для синтеза серосодержащих аминокислот и метаболитов в присутствии кислорода. КО, участвующие в ассимиляционном восстановлении сульфатов, такие как cysH (184 ORF, сопоставленные с {«type»: «entrez-нуклеотид», «attrs»: {«text»: «K00390», «term_id»: «204729»}} K00390), дифференциально экспрессировались зимой.Семьдесят пять генов sox (т.е. soxAB ; {«type»: «entrez-nucleotide», «attrs»: {«text»: «K00301», «term_id»: «175763»}} K00301, {» type «:» entrez-нуклеотид «,» attrs «: {» text «:» K00302 «,» term_id «:» 48086 «}} K00302 и {» type «:» entrez-нуклеотид «,» attrs «: { «text»: «K00303», «term_id»: «13561»}} K00303) были вовлечены в окисление серы и по-разному выражались летом. sox гены окисляют тиосульфат, продукт растворения сульфида металла, до промежуточного сульфата для выработки энергии или уменьшения углерода.Таким образом, ген sox может быть экспрессирован у видов, которые процветают при более высоких температурах, поскольку другие переменные, такие как pH и уровни металлов, были одинаковыми между сезонами. В целом эти данные KO демонстрируют, что, хотя обычные окислители железа и серы не преобладали над EB-90M, организмы активно участвуют в круговороте железа и серы. Активно экспрессируемые гены, участвующие в метаболизме азотаОбилие транскриптов, участвующих в метаболизме азота, согласуется с азотфиксирующими Bradyrhizobium , которые являются наиболее многочисленными таксонами микробов, обнаруженными на EB-90M.Данные по экспрессии всех КО, участвующих в метаболизме азота, доступны на https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 7-8). Виды Bradyrhizobium фиксируют азот в корневых клубеньках для роста растений, особенно в кислой [94] и богатой пиритом [63] почве. В летних отложениях виды Bradyrhizobium по-разному экспрессировали ген нитрогеназы nifH ({«type»: «entrez-нуклеотид», «attrs»: {«text»: «K02588», «term_id»: «192885»}} } K02588; 28 ORF), биомаркер азотфиксации, превращения молекулярного азота в аммиак [42].Учитывая, что субнабор РНК-транскриптов, аннотированный как nifH , не имеет таксономической аннотации, nifH может также экспрессироваться растениями, обнаруженными в нашем наборе данных, которым требуется больше азота для роста в это время года [95]. Аммиак также может быть получен из нитрата или ассимилирован путем восстановления нитрата. Ассимиляционные гены, такие как narB /1.7.7.2 ({«type»: «entrez-нуклеотид», «attrs»: {«text»: «K00367», «term_id»: «176442»}} K00367) и NR (K010534) (всего 52 ORF), которые превращают нитрат в нитрит, экспрессировались дифференциально [42].Транскриптов, кодирующих narB ({«type»: «entrez-нуклеотид», «attrs»: {«text»: «K00367», «term_id»: «176442»}} K00367), зимой было значительно больше, тогда как кодирующих NR (K010534) летом были дифференциально многочисленны. Таким образом, отдельные микроорганизмы вместе с другими растениями, вероятно, регулируют уровень нитратов в отложениях между сезонами. Эта дифференциальная экспрессия может быть связана с обилием азотфиксирующих бактерий и обилием транскриптов, кодирующих nifH , что приводит к образованию избытка аммиака летом. Активно экспрессируемые гены, участвующие в углеродном метаболизме в фотосинтезирующих организмахФиксация углерода может происходить через цикл Кальвина-Бенсона-Бассема у растений, водорослей и типов бактерий, таких как Cyanobacteria, Chlorobi, Proteobacteria, Firmicutes, Acidobacteria и Chloroflexi . Некоторые из этих бактериальных типов доминировали на EB-90M и снижали экспрессию ключевых генов в этом цикле, таких как rbcL и rbcS ( RuBisCo , 4.1.1.39 [42]), а также prkB ( 2.7.1.19 [42]) зимой, вероятно, из-за меньшего количества солнечного света [96]. Данные по экспрессии для всех КО, участвующих в фиксации углерода, доступны на https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 7-8). Летом было значительно больше транскриптов RuBisCo (144 ORF) и prkB (51 ORF), кодирующих ферменты, которые связывают диоксид углерода с рибулозо-1,5-бисфосфатом с образованием 3-фосфоглицерата и фосфорилируют рибулозу-5. -фосфат [97] соответственно. Другие пути фиксации углерода также были представлены в EB-90M ARD.Например, организмы экспрессируют гены восстановительной трикарбоновой кислоты, принадлежащие к пути C4-дикарбоновой кислоты [42], который превращает диоксид углерода в ацетил-КоА. ORF (271 из mdh , 1.1.1.82), кодирующие малатдегидрогеназу, фермент, который превращает оксалоацетат в малат в этом пути [42], были экспрессированы летом для преобразования оксалоацетата в глюкозу для получения энергии. Метаногены, прокариоты, которые восстанавливают углекислый газ с образованием метана, также были идентифицированы на основе экспрессии метаногенных генов mcrA [98] (пять ORF; K07451) и mcrB (11 ORF; K07452) в оба сезона. Вторичные метаболические путиВсего 1589 BGC были аннотированы antiSMASH 5.0 [39], но только 449 соответствовали критериям фильтрации [42]. Аннотации antiSMASH и связанные данные по экспрессии доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 9–10). Большинство BGC участвуют в биосинтезе нерибосомных пептидов (33%), за которыми следуют терпены (27%) (). Поскольку в этом наборе данных присутствуют актиномицеты, в частности, Streptomyces , которые являются продуктивными продуцентами вторичных метаболитов [99], мы ожидали найти BGC, предназначенные для вторичного метаболизма.Однако большинство BGC было обнаружено в контигах без таксономической аннотации. Подмножество BGC идентично тем, которые участвуют в производстве каротиноидов, анабаенопептин NZ 857 / ностамид A, ризомид A – C (цитотоксический [100]), ксенотетрапептид, n -ацилаланин, алкилрезорцин, 1-гептадецен, биказорнутин. (цитотоксический [101]), микромонолактам, геосмин и фомопсин (ингибитор полимеризации тубулина [102]). Эти данные согласуются с нашей гипотезой о том, что EB-90M может быть источником биоактивных метаболитов, поскольку в производстве биоактивных соединений участвуют BGC.Примечательно, что есть возможность найти больше, поскольку многие продукты BGC неизвестны. Процент генов, предназначенных для производства различных классов вторичных метаболитов.Пи-диаграмма аннотированных анти-SMASH BGC, участвующих в производстве вторичных метаболитов во всех образцах ДНК EB-90M (осадок и вода). Классы, составляющие менее 2% от 449 BGC, классифицируются как «Прочие». В наборах метатранскриптомных данных 65 из 449 транскриптов, кодирующих гены в BGC, были в разной степени многочисленны летом (39 генов), чем зимой (26 генов), в зависимости от p-взаимодействия и значений РНК q-winter / summer <0.05 (). Экспрессия гена фитоэнсинтазы, crtB , летом увеличивалась у одних организмов и снижалась у других (таблица S14), что позволяет предположить, что отдельные микроорганизмы могут изменять свой метаболизм в зависимости от наличия других таксонов и экологических факторов, требующих определенных метаболиты. В целом, летом было произведено больше аннотированных терпенов и нерибосомных пептидов. Сезонная экспрессия терпеновых BGC, терпен- и NRP-аннотированных BGC.Градиентный график, демонстрирующий экспрессию BGC в пробах отложений зимой (голубой) и летом (оранжевый).NRP, нерибосомальный пептид; ПК, поликетид. Все данные соответствовали следующим критериям: p-взаимодействие ≤ 0,05 с последующим q-зимним / летним РНК ≤ 0,05. Гены устойчивости к металлам (MRG)Из 285 экспериментально подтвержденных MRG в базе данных BacMet 133 были идентифицированы в метагеноме, что составляет 7021 уникальную ORF из 161984. Все данные аннотаций и выражений BacMet доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 11). Эти данные согласуются с нашей гипотезой, поскольку микроорганизмы, придающие устойчивость к металлам, обычно обнаруживаются при ARD для связывания или химического преобразования токсичных тяжелых металлов.Летом восемь из 133 генов BacMet не экспрессировались [42], а 719 из 7021 ORF дифференциально экспрессировались [42]. В основном транскрипты без таксономической аннотации и протеобактерии рода Burkholderia придают устойчивость к тяжелым металлам Cu, Cd, Co, Zn, Fe, Ag, Pb, Hg, As, Sb и Ni. Протеобактерии экспрессировали MRG в кислой среде [103–106] и были исследованы для биоремедиации загрязненной металлами среды с помощью оттока, биоабсорбции и преобразования металлов в менее токсичные формы [107].Некоторые из наиболее дифференциально экспрессируемых MRG были вовлечены в Cu ( dnaK ) [104], Cu / Te ( actP ) [108], Cd / Co / Zn / Cu ( czcA / B ; actP) [105, 109], Cu / Zn / As ( pstA ) [110, 111], Mn / Zn / Fe / Cd / Co ( mntH ) [112] и Zn ( zraR ) [113] сопротивление. Гены, относящиеся к устойчивости к As- и Sb-содержащим соединениям ( pgpA; acr3 ), экспрессировались по-разному, хотя Sb и As почти не определялись (). Основываясь на большом количестве генов без функциональной аннотации, в EB-90M, вероятно, существует больше белков с уникальными механизмами и свойствами связывания металлов. Механизмы устойчивости и вторичный метаболизмБогатые металлами среды отбирают для MRG, а также совместно отбирают гены устойчивости к антибиотикам на основе сходных генетических механизмов [8]. Эти гены устойчивости могут быть использованы для биоразведки загрязненной металлами окружающей среды на предмет новой химии и биологической активности. Стратегии определения приоритетов BGC, продуцирующих антибиотики, основаны на обнаружении BGC, содержащих дублированные основные гены, гены устойчивости или генетические доказательства HGT [114]. Кроме того, существуют MRG, кодирующие белки (например,g., переносчики семейства резистентность-клубенько-деление, такие как CzcA), которые катализируют отток антибиотиков и химиотерапевтических средств [115], и подмножество также функционируют как гены устойчивости к антибиотикам, которые можно использовать для поиска новых биологически активных соединений [114]. Используя веб-сервер ARTS [41], платформу, которая определяет приоритетность антибиотиков BGC на основе этих гипотез, ряда основных (6358–8289) и дублированных (5595–7395) генов, а также известных моделей устойчивости (8501), аннотированы преимущественно резистентность к биотин-липоильным доменам (1585 из 8501) [42].Данные аннотации ART доступны по адресу https://doi.org/10.6084/m9.figshare.c.4864863 (FigShare 12). Некоторые дублированные гены совместно локализованы с BGC, в основном (5–12 из 258–325) сигма-фактор 70 РНК-полимеразы и триггерный фактор, демонстрируя потенциал микробиома ARD как источника антибиотиков. MRG могут колокализоваться с BGC и играть роль в устойчивости к антибиотикам [116]. Мы идентифицировали шесть BGC, которые колокализовались с BacMet-аннотированными MRG на контигах () [42]. показывает совместную локализацию и коэкспрессию гена транспорта фосфата pitA с аннотированным гомосериновым лактоном нерибосомным пептидом BGC летом ().PitA переносит фосфат вместе с другими катионами, такими как ионы токсичных металлов [117], и может по-разному экспрессироваться летом в ответ на избыток фосфата или металла. Избыточные ионы металлов могут запускать производство вторичных метаболитов, таких как металл-связывающие лактоны гомосерина [100] или нерибосомные пептиды, называемые сидерофорами [118]. Cu- и Zn-экспрессируемый ген устойчивости к антибиотикам mdtA , кодирующий слитый с мембраной белок комплексного множественного лекарственного оттока MdtABC, также колокализуется и коэкспрессируется с геном поликетидсинтазы, ppsE [42].Оба гена по-разному экспрессировались летом; однако и MRG, и BGC не соответствовали q-зимней / летней РНК ≤ 0,05 для, но они встречали РНК p-зима / лето ≤ 0,05 [42]. Подмножеством ARTS-аннотированных генов устойчивости также были MRG (т.е. металлопептидазы, HflB [119] и RseP [120]), которые совместно локализовались с BGC. Таким образом, совместная локализация и коэкспрессия MRG и BGC могут быть использованы для определения приоритета антибиотик-продуцирующих BGC (например, ppsE ) и поиска новых регуляторных механизмов вторичного метаболизма. Колокализация и коэкспрессия генов устойчивости к металлам и вторичных метаболитов.Градиентный график дифференциальной коэкспрессии pitA , MRG, кодирующего транспортный белок с захватом фосфата, с аннотированными генами, участвующими в биосинтезе вторичного метаболита, гомосеринового лактон-нерибосомного пептида в контиге 4689 (длиной 20406 нуклеотидов) , летом (оранжевый) и зимой (синий). Все данные соответствовали следующим критериям: р-взаимодействие ≤ 0,05 в сочетании с РНК q-зима / лето ≤ 0.05 соответственно. Положения нуклеотидов в контиге показаны в скобках. Дополнительная информацияS1 ТаблицаГеохимия водных проб.Физико-химические характеристики проб воды, отобранных 28 июля 2017 г. и 14 января 2018 г. на ЭБ-90М. Значения со стандартными ошибками представляют собой среднее значение трех различных образцов, собранных в один и тот же день. N / A означает, что эти параметры не измерялись. (DOCX) S2 ТаблицаАннотация необработанных чтений.Обработка данных последовательности с аннотированной таксономией. Никакие последовательности не были обрезаны. Сделанные аннотации исключают неклассифицированные или неназначенные типы, роды, виды и гены. (DOCX) S3 ТаблицаАльфа-разнообразие бактериальных таксонов в летней воде и донных отложениях.Индексы разнообразия Шеннона, оценивающие альфа-разнообразие бактериальных таксонов в июльских и январских пробах донных отложений и июльских пробах воды. (DOCX) S4 ТаблицаАльфа-разнообразие таксонов архей в летних водах и отложениях.Индексы разнообразия Шеннона, оценивающие альфа-разнообразие таксонов архей в июльских и январских пробах отложений и июльских пробах воды. (DOCX) S5 ТаблицаАльфа-разнообразие таксонов бактерий, архей и грибов в летних водах и отложениях.Индексы разнообразия Шеннона, оценивающие альфа-разнообразие таксонов грибов в июльских и январских пробах отложений и июльских пробах воды. (DOCX) S6 ТаблицаАнализ альфа-разнообразия бактериальных таксонов в пробах донных отложений и бета-разнообразия во всех пробах отложений.Анализ альфа-разнообразия бактериальных таксонов в пробах донных отложений, а также анализ бета-разнообразия во всех пробах отложений на разных уровнях аннотации. Индекс разнообразия Шеннона был определен для оценки альфа-разнообразия, а анализы ADONIS и ANOSIM использовались для определения бета-разнообразия среди донных отложений с января 2018 года по сравнению с июлем 2017 года. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0,001. (DOCX) S7 ТаблицаАнализ альфа-разнообразия таксонов архей в пробах отложений и бета-разнообразия во всех пробах отложений.Анализ альфа-разнообразия таксонов архей в пробах отложений, а также анализ бета-разнообразия во всех пробах отложений на разных уровнях аннотации. Индекс разнообразия Шеннона был определен для оценки альфа-разнообразия, а анализы ADONIS и ANOSIM использовались для определения бета-разнообразия среди донных отложений с января 2018 года по сравнению с июлем 2017 года. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0,001. (DOCX) S8 ТаблицаАнализ альфа-разнообразия грибковых таксонов в пробах донных отложений и бета-разнообразия во всех пробах отложений.Анализ альфа-разнообразия таксонов грибов в пробах донных отложений, а также анализ бета-разнообразия во всех пробах отложений на разных уровнях аннотации. Индекс разнообразия Шеннона был определен для оценки альфа-разнообразия, а анализы ADONIS и ANOSIM использовались для определения бета-разнообразия среди донных отложений с января 2018 года по сравнению с июлем 2017 года. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0,001. (DOCX) S9 ТаблицаАнализ альфа-разнообразия и бета-разнообразия бактериальных таксонов в летних пробах воды и донных отложений и между ними, соответственно.Анализ альфа-разнообразия бактерий, а также анализ бета-разнообразия для всех летних проб (т.е. воды и донных отложений) на разных уровнях аннотации. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0,001. (DOCX) S10 ТаблицаАнализ альфа-разнообразия и бета-разнообразия таксонов архей в летних пробах воды и донных отложений и между ними, соответственно.Анализ альфа-разнообразия архей, а также анализ бета-разнообразия по всем летним образцам (т.е., вода и осадок) на разных уровнях аннотации. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0,001. (DOCX) S11 ТаблицаАнализ альфа-разнообразия и бета-разнообразия грибных таксонов в летних пробах воды и донных отложений и между ними, соответственно.Анализ альфа-разнообразия грибов, а также анализ бета-разнообразия для всех летних проб (т.е. воды и донных отложений) на разных уровнях аннотации. Значимость * ≤ 0,05, ** ≤ 0,01, *** ≤ 0.001. (DOCX) S12 ТаблицаСводка генов, аннотированных Prokka.Резюме аннотированных Prokka генов в пробах воды и донных отложений. Все образцы имели 0 генов, которые не были назначены из-за множественного картирования, дупликации, несоединений, вторичной структуры, химер, длины фрагментов и качества картирования. (DOCX) S13 ТаблицаСогласование необработанных чтений с метагеномной сборкой.Статистика согласования необработанных считываний (т.е. ДНК и РНК) с метагеномной сборкой в образцах воды и донных отложений. (DOCX) S14 ТаблицаЭкспрессия гена фитоинсинтазы crtB.Таксоны с избыточной или недостаточной экспрессией различных генов фитоинсинтазы crtB с соответствующими изменениями в логарифмическом масштабе и p-значениями взаимодействия (Тип: Сезон). Похожие записи
| ||