Принцип работы мостовой схемы
Работаем в обычном режиме! Оформляйте заказы через «Корзину» на сайте!
Корзина: Пусто
if ($_SERVER[‘PHP_SELF’] !== «/configurator/») { // сворачиваем на странице конфигуратора ?>
} ?>
- Как применяют измерительные мосты
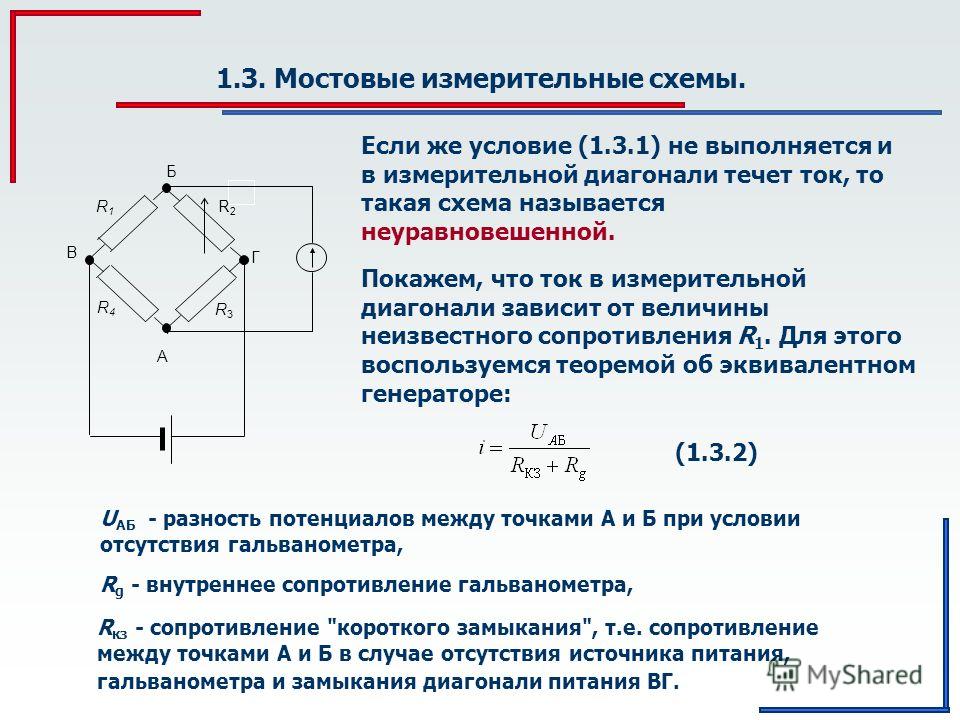
Принцип работы мостовой схемы измерения продемонстрирован на рисунке 1, а способ ее применения на практике — на рисунке 2.
Рис. 1.
Сопротивление R1 вычисляется исходя из полученного при балансировке измерительно моста соотношения R4/R3, в качестве R2 используется резистор с известным значением. Конечно, сказанное дает только самое общее представление об измерительной схеме моста. На самом деле он устроен гораздо сложнее — современные мосты создаются на основе цифровых процессоров. Микропроцессорное ядро позволяет автоматизировать процедуру измерения (в первых моделях оператор должен был пользоваться калькулятором, сегодня же все расчеты выполняются аппаратурой), обеспечить многофункциональность устройства (многие мосты интегрированы с другими измерительными приборами — мультиметрами, рефлектометрами и т. п.), устранить помехи (посторонние постоянные и переменные напряжения почти всегда присутствуют на жилах кабелей), организовать дальнейшую обработку накопленных результатов измерений (хранение, обмен с компьютером, печать протоколов) и др.
Рис. 2.
Рассмотренный выше мост, используемый для измерения сопротивления, носит имя Уитстона (Wheatstone).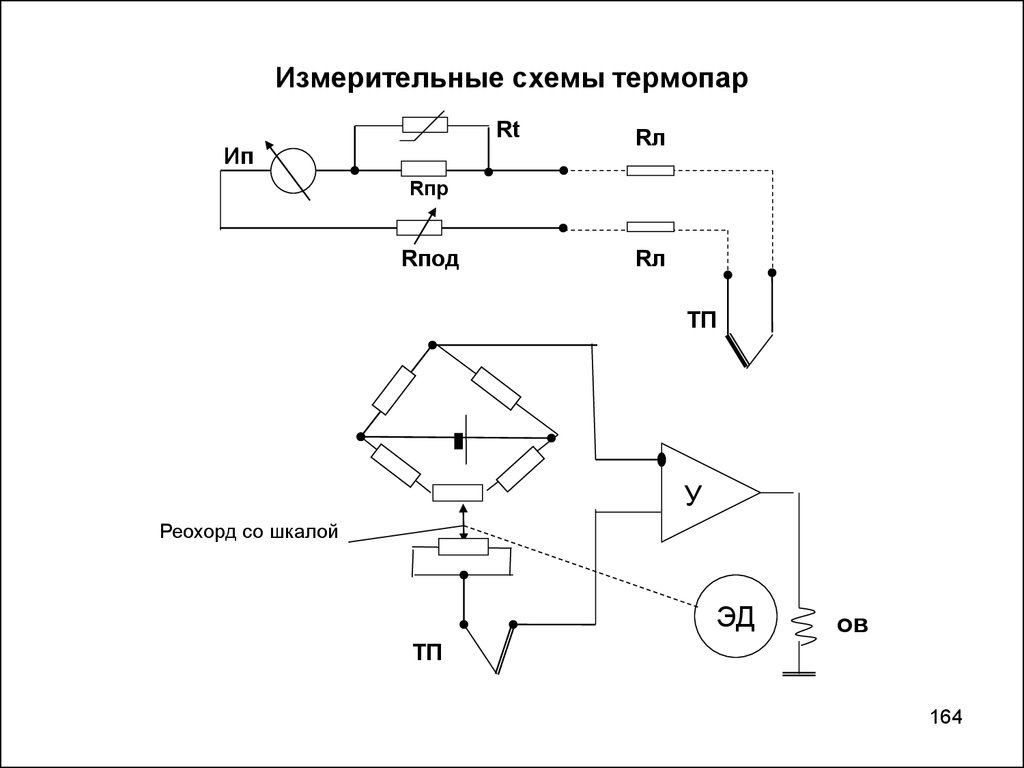 Для подключения измеряемых цепей в нем применяются всего две клеммы (B и C). Более сложные схемы реализованы в двух других мостах — Муррея (Murray) и Купфмюллера (Kupfmuller) (рис.3). Здесь измеряемые цепи подключаются с помощью трех клемм (A, B и C). В более сложных схемах Хилборна/Графа (Hilborn/Graf) задействуются четыре клеммы (A, B, B’ и C). Смысл увеличения числа точек подключения станет понятен при рассмотрении схем измерения с применением мостов.
Для подключения измеряемых цепей в нем применяются всего две клеммы (B и C). Более сложные схемы реализованы в двух других мостах — Муррея (Murray) и Купфмюллера (Kupfmuller) (рис.3). Здесь измеряемые цепи подключаются с помощью трех клемм (A, B и C). В более сложных схемах Хилборна/Графа (Hilborn/Graf) задействуются четыре клеммы (A, B, B’ и C). Смысл увеличения числа точек подключения станет понятен при рассмотрении схем измерения с применением мостов.
Рис. 3.
Еще один момент. Все упомянутые мостовые схемы используются для измерений при постоянном токе (определяются величины активных сопротивлений, подключенных к клеммам). Кроме того, мостовые схемы Уитстона и Муррея используются для измерений при переменном токе — определяются величины емкостей, подключенных к клеммам (рис. 4). В таких мостах источником напряжения служит генератор синусоидального напряжения.
Рис. 4.
- Методики измерений с помощью мостовых приборов
- Полезные советы
- Сравнительная таблица измерительных мостов
Подпишитесь на рассылку новых материалов!
Имя
E-mail *
Согласие на отправку персональных данных *
* — Обязательное для заполнения
Выберите направление, по которому Вы хотите переговорить:
Метрология и стандартизация
Поможем написать любую работу на аналогичную тему
-
Реферат
Метрология и стандартизация
От 250 руб
-
Контрольная работа
Метрология и стандартизация
От 250 руб
-
Курсовая работа
Метрология и стандартизация
От 700 руб
Получить выполненную работу или консультацию специалиста по вашему учебному проекту
Узнать стоимость
Метроло́гия — наука об измерениях, методах и средствах обеспечения их единства и способах достижения требуемой точности. Предметом метрологии является извлечение количественной информации о свойствах объектов с заданной точностью и достоверностью; нормативная база для этого — метрологические стандарты.
Предметом метрологии является извлечение количественной информации о свойствах объектов с заданной точностью и достоверностью; нормативная база для этого — метрологические стандарты.
Метрология состоит из трёх основных разделов:
- Теоретическая или фундаментальная — рассматривает общие теоретические проблемы (разработка теории и проблем измерений физических величин, их единиц, методов измерений).
- Прикладная — изучает вопросы практического применения разработок теоретической метрологии. В её ведении находятся все вопросы метрологического обеспечения.
- Законодательная — устанавливает обязательные технические и юридические требования по применению единиц физической величины, методов и средств измерений.
Стандартиза́ция — деятельность по разработке, опубликованию и применению стандартов, по установлению норм, правил и характеристик в целях обеспечения безопасности продукции, работ и услуг для окружающей среды, жизни, здоровья и имущества, технической и информационной совместимости, взаимозаменяемости и качества продукции, работ и услуг в соответствии с уровнем развития науки, техники и технологии, единства измерений, экономии всех видов ресурсов, безопасности хозяйственных объектов с учётом риска возникновения природных и техногенных катастроф и других чрезвычайных ситуаций, обороноспособности и мобилизационной готовности страны.
Стандартизация направлена на достижение оптимальной степени упорядочения в определенной области посредством установления положений для всеобщего и многократного применения в отношении реально существующих или потенциальных задач.
За реализацию норм стандартизации отвечают органы стандартизации, наделенные законным правом руководить разработкой и утверждать нормативные документы и другие правила, придавая им статус стандартов.
В области промышленности стандартизация ведет к снижению себестоимости продукции, поскольку:
- позволяет экономить время и средства за счет применения уже разработанных типовых ситуаций и объектов;
- повышает надежность изделия или результатов расчетов, поскольку применяемые технические решения уже неоднократно проверены на практике;
- упрощает ремонт и обслуживание изделий, так как стандартные узлы и детали — взаимозаменяемые (при условии, что сборка осуществлялась без пригоночных операций).
На нашем сайте предоставлены учебные материалы для студентов, по метрологии и стандартизации. Суммарно около
Внимание!
Если вам нужна помощь в написании работы, то рекомендуем обратиться к профессионалам. Более 70 000 авторов готовы помочь вам прямо сейчас. Бесплатные корректировки и доработки. Узнайте стоимость своей работы.
Расчет стоимостиГарантииОтзывы
an117: Основные схемы моста
Преамбула
Мостовые схемы используются уже более 150 лет.
На сегодняшний день мост по-прежнему остается самой экономичной трассой.
метод точного измерения сопротивления.
Исходная топология мостовой схемы имела много уникальных
модификаций и был применен к таким приложениям, как
Измерения переменного тока, автоматическая балансировка, генераторы и
усилители. Пожалуй, самое известное приложение для Самуэля.
Схема Хантера Кристи представляет собой мостовой тензодатчик для
измерения типа деформации в механических узлах и
строительные конструкции.
В данном примечании по применению основное внимание уделяется некоторым тонкости возбуждения по мостовой схеме и связанные с этим производительность. Анализ всех многочисленных топологий мостов которые компенсируют небольшие эффекты второго порядка, выходят за рамки сфера применения данного указания по применению. Читатели, заинтересованные в подробные сведения о сложных топологиях мостов и приложения для тензодатчиков должны исследовать Интернет, который содержит тысячи сайтов, посвященных таким деталям. В Кроме того, читателям рекомендуется изучить полная линейка модулей формирования сигнала (SCM) посвященный приложениям тензометрического моста, ссылка 1.
Основные схемы моста
В следующих примерах основное внимание уделяется только типу, показанному на рисунке 1.
топологии мостовой схемы с одной резистивной переменной
элемент. Выходные реакции, включая эффекты
сопротивление линии возбуждения по напряжению и току
возбуждение моста, а также линейность моста. Ошибки из-за сопротивлений плохо замкнутых контактов и
коррозионным действием разнородных металлов пренебрегают.
Кроме того, сопротивлениями выходных линий пренебрегают, т.к.
Стандартной практикой является измерение выходного напряжения моста.
с устройствами с высоким импедансом (обычно >
Ошибки из-за сопротивлений плохо замкнутых контактов и
коррозионным действием разнородных металлов пренебрегают.
Кроме того, сопротивлениями выходных линий пренебрегают, т.к.
Стандартной практикой является измерение выходного напряжения моста.
с устройствами с высоким импедансом (обычно >
Аналитические исследования в этом документе сосредоточены на мосте типа R-ом, что означает все мостовые резисторы равны «R» Ом, когда они не подвергаются воздействию поля переменные процесса. На рисунке 1 представлен R-омный мост. датчик поля типа со всеми мостовыми резисторами (R1, R2, R3, Rx) расположен в точке измерения поля; однако, как резистор Rx — мостовой резистивный чувствительный элемент, он варьируется с параметрами процесса, такими как температура, расход, давление, уровень, влажность, деформация и т. д. В R-ом мосту топологии, R1, R2, R3 равны R и Rx = (R+∆R) где ∆R — функция переменных процесса.
Примеры
Будут представлены две категории топологий R-омного моста. осмотрел. Мосты категории 1 определяются как мосты
топологии со всеми мостовыми резисторами, расположенными в поле
с одним или несколькими элементами, подвергаемыми процессу
переменная; Мосты категории 2 определяются как имеющие один или
больше мостовых резистивных сенсорных элементов, которые расположены в
поле, доступное для переменных процесса, с
остальные мостовые резисторы, расположенные в точке электрического
возбуждение. Мосты с одной или двумя переменными процесса
элементы часто называют четверть- и полумостами,
соответственно.
осмотрел. Мосты категории 1 определяются как мосты
топологии со всеми мостовыми резисторами, расположенными в поле
с одним или несколькими элементами, подвергаемыми процессу
переменная; Мосты категории 2 определяются как имеющие один или
больше мостовых резистивных сенсорных элементов, которые расположены в
поле, доступное для переменных процесса, с
остальные мостовые резисторы, расположенные в точке электрического
возбуждение. Мосты с одной или двумя переменными процесса
элементы часто называют четверть- и полумостами,
соответственно.
Мост сопротивления сопротивления категории 1 с возбуждением по напряжению
Этот пример основан на рис. 1, где возбуждение
источником является напряжение V12. Фактическое возбуждение моста
напряжение, Vxy, непостоянно из-за падений напряжения в
сопротивление линии возбуждения. Выходное напряжение моста
Vвых = (Ва-Вб) = Ваб. Если Vab всегда измеряется
устройство с высоким импедансом (обычно> 1 МОм), затем чувствительная линия
сопротивлениями можно пренебречь и Vab = Va’b’.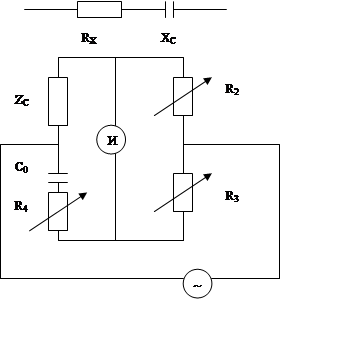 Как
пример эффектов сопротивления линии считывания, предположим
сопротивление линии 10 Ом, вольтметр с входом 1 МОм
импеданс и мост 120 Ом. Вольтметр загружается
клеммы a’-b’ составляет примерно 0,99988, тогда как
нагрузка на клеммы а-б составляет примерно 0,99987 или а
разница -0,001%.
Как
пример эффектов сопротивления линии считывания, предположим
сопротивление линии 10 Ом, вольтметр с входом 1 МОм
импеданс и мост 120 Ом. Вольтметр загружается
клеммы a’-b’ составляет примерно 0,99988, тогда как
нагрузка на клеммы а-б составляет примерно 0,99987 или а
разница -0,001%.
Уравнение 1 иллюстрирует выходное напряжение, Vout = Vab, Рисунок 1, без учета всех сопротивлений линии.
Уравнение 1 иллюстрирует классическое уравнение баланса моста, который определяет набор номиналов резисторов, который уравновешивает моста, что приводит к нулевому выходному напряжению моста, Vab = 0. Это условие возникает, когда R1*Rx = R2*R3. Обратите внимание условие баланса классического бриджа действует независимо от сопротивление линии и значение напряжения возбуждения. Ясно, что это делает мост полезной топологией схемы для баланса измерительные приложения.
Работа Кристи 1833 года показала, что если Rx является неизвестным
и R2 = R1, то выход моста будет равен нулю (было
легко измерить ноль в 1833 году), когда R3 настроен на
равно неизвестному сопротивлению, Rx. Многие промышленные
преобразователи используют мостовые схемы с одним или несколькими мостами
сопротивления, которые являются функциями переменных процесса, таких как
температура, расход, давление, деформация, влажность и т. д. В этих
ситуации, датчики на основе мостовой топологии не могут быть
удобно (или экономично) сбалансировано на поле
расположение; следовательно, ненулевые выходные мостовые напряжения равны
измерено. В отличие от балансовых измерений, мостовой
возбуждения и сопротивления линии будут способствовать
погрешности измерений.
Многие промышленные
преобразователи используют мостовые схемы с одним или несколькими мостами
сопротивления, которые являются функциями переменных процесса, таких как
температура, расход, давление, деформация, влажность и т. д. В этих
ситуации, датчики на основе мостовой топологии не могут быть
удобно (или экономично) сбалансировано на поле
расположение; следовательно, ненулевые выходные мостовые напряжения равны
измерено. В отличие от балансовых измерений, мостовой
возбуждения и сопротивления линии будут способствовать
погрешности измерений.
Промышленные преобразователи с топологией мостовой схемы имеют
наборы резисторов, которые уравновешивают мост при установившемся значении
определяется параметрическим полем стационарного состояния
вход. При изменении этих стационарных параметров мост
становится несбалансированным, и выходной сигнал не равен нулю.
Измерение этого несбалансированного напряжения с помощью
применяемый масштабный коэффициент является прямым указанием на изменение
переменная поля. Полезный диапазон этих напряжений находится в
категория от микровольта до милливольта; следовательно, низкий
необходимо использовать методы измерения напряжения.
Полезный диапазон этих напряжений находится в
категория от микровольта до милливольта; следовательно, низкий
необходимо использовать методы измерения напряжения.
Уравнение 2 представляет собой выходное напряжение резисторной мостовой схемы. топологии, показанные на рисунке 1, с возбуждением напряжением включая сопротивление линии возбуждения.
Если сопротивления линии возбуждения пренебрежимо малы, это уравнение сводится к:
На рис. 2 показана выходная характеристика 120-омного моста. топологии, показанной на рисунке 1, к изменениям в Rx. В этом имитация, возбуждение 5 В постоянного тока, Rx колеблется от 20 Ом до 220 Ом и три различных сопротивления линии возбуждения – ноль, 5 Ом и 20 Ом – используются. Сопротивление выходной линии равно пренебрегают, что является допустимой техникой, как и ранее показано.
Рисунок 2 и уравнение 2 раскрывают некоторые важные факты. о мостах 1 категории.
- Мостовой выход чувствителен к сопротивлению линии возбуждения
и всегда будет чувствителен к напряжению возбуждения, V12.

- Выходное напряжение моста нелинейно для номинального изменения Rx независимо от сопротивления линии возбуждения и напряжение возбуждения.
- При уменьшении диапазона Rx выходное напряжение моста начинает приближаться к нулю и становится более линейный. См. кружок на рис. 2.
На рис. 2а показано, что выходное напряжение моста по-прежнему кажется, что является линейным для очень малых изменений Rx и остается чувствительным к сопротивлению линии возбуждения.
Возникает вопрос. Выходное напряжение моста топология на рис. 1 когда-либо была линейной? Чтобы ответить на это, уравнение 3 — частная производная R-омного моста Vout в Уравнение 2a относительно Rx (изменение Vout для изменение Rx) при том, что все остальные переменные считаются постоянными и отсутствие сопротивления линии возбуждения.
Ясно, что уравнение 3 является нелинейной функцией и
не постоянна, что является условием, необходимым для того, чтобы Vout
быть линейной функцией от Rx. Таким образом, мост типа Рисунок 1
схемы не могут иметь выходы, которые являются линейными функциями
Rx. См. рис. 3.
Таким образом, мост типа Рисунок 1
схемы не могут иметь выходы, которые являются линейными функциями
Rx. См. рис. 3.
Для диапазона Rx от 110 до 130 Ом изменения в Vout с изменениями в Rx (уравнение 3 и рисунок 3) диапазоне от -11,3 до -9,6 мВ на Ом со средним значение -10,5 мВ на Ом при балансе.
Хотя эти цифры интересны, но непрактичны использовать частные производные при расчете выходных сигналов моста. Общепринятой практикой является признание того, что мостовые схемы нелинейные выходы, на которые влияет линия возбуждения сопротивление, и принять указанный производителями переход функциональные данные и инструкции по установке их моста датчики.
Мост R-ом категории 1 с токовым возбуждением
Уже более века топологии моста с напряжением
используются возбуждения. Сегодня с современным
технология полупроводниковых схем, источник тока
возбуждение — тоже вариант. Уравнение 4 представляет
выход по току, Iexc, возбужденный резистивно-омный мост (рисунок 1)
при пренебрежении сопротивлением линии выходного напряжения и отсутствии
сопротивление линии возбуждения.
Уравнение 4 становится уравнением 4а, когда ток возбуждение настраивается на Iexc = (V12 / R).
Обратите внимание на сходство между уравнениями 2а и 4а.
Уравнение 5 представляет собой частную производную R-омного моста. Vout в уравнении 4a по отношению к Rx (изменение Vout для изменения Rx) со всеми другими предполагаемыми переменными постоянный.
Где V12 = R*Iexc
На рисунках 4 и 5 показано визуальное сравнение выходных данных. напряжения для R-омного моста категории 1 с обоими напряжение и ток возбуждения.
На рис. 4 показаны характеристики моста 120 Ом.
схема, показанная на рисунке 1, с возбуждением от источника тока
на клеммах 1 и 2, где сопротивление линии равно нулю.
значение этого источника тока было выбрано равным 41,667 мА,
что составляет 5 В постоянного тока / 120 Ом. Это значение тока обеспечивает
Возбуждение 5 В постоянного тока на клеммах моста, когда Rx
120 Ом, условие отсутствия параметрических входов поля.
На рис. 5 показано, что поведение выхода для 120 Ом топология моста, показанная на рис. 1, с током возбуждения, в том числе с различными сопротивлениями линий нулевой, 5, и 10 Ом, не зависит от сопротивлений линии возбуждения. В этом случае изменение Vвых на изменение Rx варьируется от -10 до -10,8 мВ на Ом при среднем -10,4 мВ на Ом, что примерно так же, как для напряжение возбуждения, но явно еще не постоянное.
Сравнение категории 1 возбуждения резисторного моста
Приведенный ниже список наблюдений основан на 120-омном
топология моста на рисунке 1 с напряжением 5 В постоянного тока
возбуждения или тока возбуждения 41,67 мА с возбуждением
включены линейные сопротивления 0, 5 и 10 Ом и
Сопротивлением линии выходного напряжения пренебрегаем.
- Уравнения 4, 4a и рисунок 5 (черная кривая) показывают, что
для токового возбуждения выхода R-омного моста
топология, показанная на рисунке 1, не зависит от
сопротивление линии возбуждения.

- На рис. 4 показано, что если пренебречь сопротивлением линии 4-проводной мостовой выход R-Ом более линеен в большой диапазон Rx для текущего возбуждения (синяя кривая) чем при возбуждении напряжением (красная кривая).
- Уравнение 6 и рисунок 4 (черная кривая) показывают, что мостовые выходы, как показано возбуждением по напряжению (уравнение 2а) и текущее возбуждение (уравнение 4а) по существу идентичны вблизи баланса. Почти баланс, один можно считать, что R >> Δ R. Обратите внимание, что Rx = (R + Δ R) а Iexc определяется как V12/R.
Интересное примечание : На рисунке 1 показано применение тензометрических датчиков. где изменения R1, Rx положительно равны, а изменения в R2, R3 отрицательно равны, уравнение 6 становится
Выбор возбуждения
Сопротивления линии возбуждения по-разному влияют на мост.
выходные напряжения в зависимости от категории моста
(категория 1 или 2) и какое возбуждение (текущее или
напряжение). Рисунки 6 и 7 иллюстрируют вывод
поведение R-омных мостов категории 2 с одиночным
мостовой резистор, расположенный в поле, подключенном к
остаток моста с двумя и тремя проводами,
соответственно.
Рисунки 6 и 7 иллюстрируют вывод
поведение R-омных мостов категории 2 с одиночным
мостовой резистор, расположенный в поле, подключенном к
остаток моста с двумя и тремя проводами,
соответственно.
Обзор
На следующем рисунке 1 выходное напряжение моста выражения, R1 = R2 = R3 = R и Rx = (R+ΔR). Возбуждение по напряжению V12, возбуждение по току Iexc. в терминал 1. Для удобства поведенческий уравнения для моста, показанного на рисунке 1, пересматриваются здесь. Напомним, что сопротивления линии выходного напряжения равны на рисунке 1 пренебрегают и что Rx = (R + ∆R).
Рис. 1 Уравнения (4-проводная категория 1)
Напряжение возбуждения V12:
Токовое возбуждение, при Iexc = V12 / R:
Рисунок 6 Уравнения (2-проводная категория 2)
Напряжение возбуждения V12:
Токовое возбуждение, при Iexc = V12 / R:
6 Рисунок 6 7 уравнений (3-проводная категория 2)
Напряжение возбуждения V12:
Токовое возбуждение, при Iexc = V12 / R:
Выводы
Следующие наблюдения сделаны на основе рисунка 6.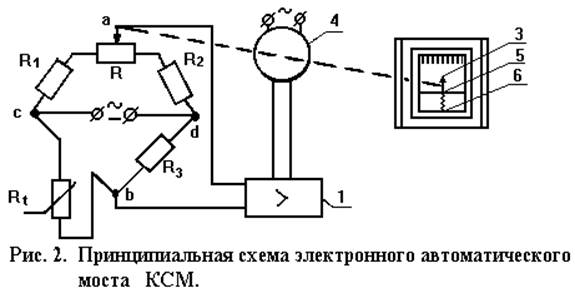 и топологии на Рисунке 7:
и топологии на Рисунке 7:
- Выходы мостового напряжения нелинейны независимо от используется ли возбуждение током или напряжением.
- Мостовые топологии категории 1 имеют выходные напряжения, не зависят от сопротивления линии, когда ток используется возбуждение.
- Мостовые топологии категории 2 имеют выходные напряжения, всегда зависят от сопротивления линии независимо от используется ли возбуждение током или напряжением.
- Если т. е. если сопротивления линии всегда могут
можно пренебречь, и если изменения в чувствительном резисторе Rx
очень мало по сравнению с R, то выход моста
то же самое для возбуждения напряжением или током.
Выходные характеристики для схем R-моста, содержащих более
чем один переменный резистивный элемент, с равным, но
противоположные изменения переменных процесса, распространены в
тензометрические мостовые схемы. Эти схемы обсуждаются в
Рекомендации Dataforth по применению тензорезисторов.
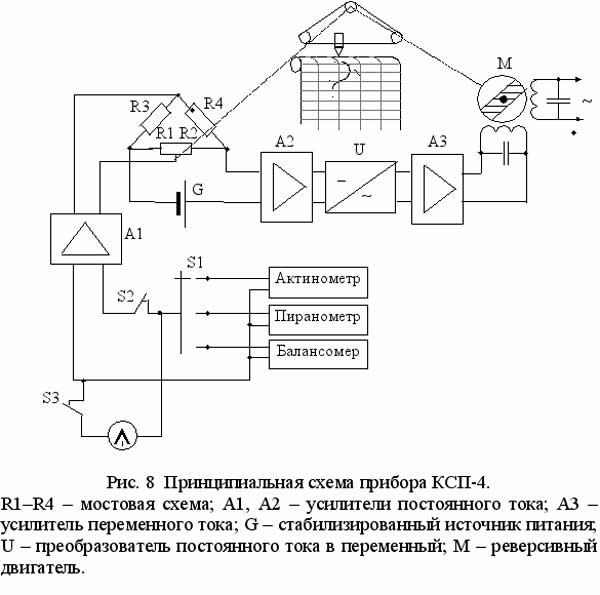
На рис. 8 представлена блок-схема модуля формирования сигналов моста Dataforth серии SCM5B38. Эти модули предназначен для взаимодействия с полными мостовыми схемами категории 1 с вариантами полумостовых и четвертьмостовых топологий категории 2. Этот преобладающее применение модуля — промышленные тензодатчики; тем не менее, он хорошо подходит для любого Применение измерительных приборов мостового типа.
Модули SCM моста Dataforth SCM5B38 (узкая полоса пропускания), SCM5B38 (широкая полоса пропускания) и DSCA38 имеют несколько (обычно 5-7) полюсных фильтров со сглаживающей фильтрацией на
сторона поля. Кроме того, эти модули имеют четырехстороннюю изоляцию, которая включает прецизионное изолированное напряжение для возбуждения поля,
изолированное питание на стороне поля, изолированное питание на стороне компьютера и изоляция сигнала. DIN-рейка Dataforth серии модулей DSCA38
имеет как узкополосные, так и широкополосные фильтры для широкого спектра применений. Кроме того, серия DSCA38
имеет +/- 5% регулировки нуля и диапазона на передней панели. Регулировка нуля особенно полезна для балансировки мостовых схем.
Читателю предлагается посетить веб-сайт Dataforth, ссылка 1, и изучить все варианты для SCM5B38 и
Мостовые модули DSCA38, а также полная линейка SCM от Dataforth.
Регулировка нуля особенно полезна для балансировки мостовых схем.
Читателю предлагается посетить веб-сайт Dataforth, ссылка 1, и изучить все варианты для SCM5B38 и
Мостовые модули DSCA38, а также полная линейка SCM от Dataforth.
Ссылки Dataforth
1. Корпорация «Датафорт», http://www.dataforth.com
Основы резистивного моста: часть первая
Скачать PDF
Abstract
Мостовые схемы — проверенный временем способ точного измерения сопротивления и других аналоговых величин. В этой статье рассматриваются основы мостовых схем и показано, как их использовать для выполнения точных измерений в практических условиях. В нем подробно описаны основные аспекты применения мостовой схемы, такие как шум, напряжения смещения и дрейф напряжения смещения, синфазное напряжение и напряжение возбуждения. В нем описывается, как подключать мосты к аналого-цифровым преобразователям (АЦП) высокого разрешения, а также способы максимального использования возможностей АЦП.
В нем описывается, как подключать мосты к аналого-цифровым преобразователям (АЦП) высокого разрешения, а также способы максимального использования возможностей АЦП.
Введение
Мост Уитстона был разработан на заре развития электроники как способ точного измерения номинала резисторов без использования точного опорного напряжения или измерителя высокого импеданса. Хотя резистивные мосты редко используются для этой первоначальной цели, они по-прежнему широко используются в датчиках. Эта статья покажет, почему мосты до сих пор так популярны, и обсудит некоторые ключевые аспекты измерения выходной мощности моста.
ПРИМЕЧАНИЕ. Эта статья состоит из двух частей. В первой части рассматривается базовый мост и основное внимание уделяется мостам с низким выходным сигналом, например, из тензометрических датчиков с приклеенной проволокой или фольгой. Часть вторая, примечания по применению 3545, «Основы резистивного моста: часть вторая», посвящена мостам с высокой выходной мощностью, например тем, в которых используются кремниевые резисторы.
Базовые конфигурации моста
На рис. 1 показан классический мост Уитстона, в котором выход моста Vo представляет собой дифференциальное напряжение между Vo+ и Vo-. При использовании в датчике значение одного или нескольких резисторов будет меняться в зависимости от интенсивности измеряемого свойства. Эти изменения сопротивления вызывают изменение выходного напряжения. Уравнение 1 показывает выходное напряжение Vo как функцию напряжения возбуждения и всех резисторов моста.
Рис. 1. Схема основного моста из пшеничного камня.
Vo = Ve(R2/(R1 + R2) — R3/(R3 + R4))
Уравнение 1 не является элегантным, но его можно упростить для большинства широко используемых мостов. Мостовые выходы наиболее чувствительны к изменениям сопротивления, когда Vo+ и Vo- равны 1/2 от Ve. Этого условия легко достичь, используя одинаковое номинальное значение R для всех четырех резисторов. Изменения сопротивления, вызванные измеряемым свойством, учитываются с помощью дельта R или dR. Резисторы с термином dR называются «активными» резисторами. В следующих четырех случаях все резисторы имеют одинаковое номинальное значение R. Один, два или четыре резистора будут активными или будут иметь термин dR. При выводе этих уравнений dR считается положительным. Если сопротивление действительно уменьшается, то используется -dR. В особых случаях, описанных ниже, величина dR одинакова для всех активных резисторов.
Резисторы с термином dR называются «активными» резисторами. В следующих четырех случаях все резисторы имеют одинаковое номинальное значение R. Один, два или четыре резистора будут активными или будут иметь термин dR. При выводе этих уравнений dR считается положительным. Если сопротивление действительно уменьшается, то используется -dR. В особых случаях, описанных ниже, величина dR одинакова для всех активных резисторов.
Четыре активных элемента
В первом случае активны все четыре мостовых резистора. Сопротивление R2 и R4 увеличивается с интенсивностью измеряемого свойства, а сопротивление R1 и R3 уменьшается. Этот случай типичен для тензодатчика, использующего четыре тензодатчика. Физическая ориентация тензорезисторов определяет, будет ли их значение увеличиваться или уменьшаться при приложении нагрузки. Уравнение 2 показывает, что эта конфигурация обеспечивает простую линейную зависимость между выходным напряжением (Vo) и изменением сопротивления (dR). Эта конфигурация также обеспечивает наибольший выходной сигнал. Стоит отметить, что выход — это не просто линейная функция dR, это линейная функция dR/R. Это тонкое, но важное отличие, поскольку изменение сопротивления большинства чувствительных элементов пропорционально их объемному сопротивлению.
Стоит отметить, что выход — это не просто линейная функция dR, это линейная функция dR/R. Это тонкое, но важное отличие, поскольку изменение сопротивления большинства чувствительных элементов пропорционально их объемному сопротивлению.
Vo = Ve(dR/R) Мост с четырьмя активными элементами.
Один активный элемент
Второй случай — один активный элемент (уравнение 3). Это часто используется, когда соображения стоимости или проводки более важны, чем амплитуда сигнала.
Vo = Ve(dR/(4R + 2dR)) Мост с одним активным элементом.
Как и следовало ожидать, мост с одним активным элементом имеет в 4 раза больший выходной сигнал, чем мост с четырьмя активными элементами. Другой важной характеристикой этой конфигурации является нелинейный выходной сигнал, вызванный добавлением члена dR в знаменатель. Эта нелинейность мала и предсказуема. При необходимости это можно исправить программно.
Два активных элемента с противоположным откликом
Третий случай, показанный в уравнении 4, имеет два активных элемента с сопротивлениями, изменяющимися в противоположных направлениях (dR и -dR). Оба резистора размещаются на одной стороне моста (R1 и R2 или R3 и R4). Как и ожидалось, чувствительность вдвое выше, чем у моста с одним активным элементом, и вдвое меньше, чем у моста с четырьмя активными элементами. Выход для этой конфигурации является линейной функцией dR и dR/R. Члены dR в знаменателе отсутствуют.
Оба резистора размещаются на одной стороне моста (R1 и R2 или R3 и R4). Как и ожидалось, чувствительность вдвое выше, чем у моста с одним активным элементом, и вдвое меньше, чем у моста с четырьмя активными элементами. Выход для этой конфигурации является линейной функцией dR и dR/R. Члены dR в знаменателе отсутствуют.
Vo = Ve(dR/(2R)) Два активных элемента с противоположным откликом.
И во втором, и в третьем случаях активна только половина моста. Другая половина просто обеспечивает опорное напряжение, равное 1/2 Ve. Следовательно, нет необходимости, чтобы все четыре резистора имели одинаковое номинальное значение. Важно только, чтобы оба резистора на левой половине моста совпадали, и оба резистора на правой половине моста совпадали.
Два идентичных активных элемента
В четвертом случае также используются два активных элемента, но эти элементы имеют одинаковую реакцию — они оба увеличивают значение или уменьшают значение. Чтобы быть эффективными, эти резисторы должны располагаться по диагонали моста (R1 и R3 или R2 и R4). Очевидным преимуществом такой конфигурации является то, что в обоих местах можно использовать чувствительный элемент одного и того же типа. Недостатком является нелинейный выходной сигнал, являющийся следствием члена dR в знаменателе уравнения 5.
Очевидным преимуществом такой конфигурации является то, что в обоих местах можно использовать чувствительный элемент одного и того же типа. Недостатком является нелинейный выходной сигнал, являющийся следствием члена dR в знаменателе уравнения 5.
Vo = Ve(dR/(2R + dR) Два идентичных активных элемента в мостовой схеме, управляемой напряжением.
Эта нелинейность предсказуема, и ее можно устранить с помощью программного обеспечения или устранить, управляя мостом с источником тока, а не с источником напряжения. В уравнении 6 Ie представляет собой ток возбуждения. Следует отметить, что Vo в уравнении 6 является функцией только dR, а не отношения dR/R, как это было в предыдущих случаях.
Vo = Ie(dR/2) Два идентичных активных элемента в токоуправляемом мосту
Понимание четырех описанных выше особых случаев полезно при работе с отдельными чувствительными элементами. Однако во многих случаях датчик имеет внутреннюю перемычку с неизвестной конфигурацией. В этих случаях знание точной конфигурации не очень важно. Производитель предоставит необходимую информацию, такую как погрешность линейности чувствительности, синфазное напряжение и т. д. Но зачем вообще использовать мост? На этот вопрос легко ответить, рассмотрев следующий пример.
Производитель предоставит необходимую информацию, такую как погрешность линейности чувствительности, синфазное напряжение и т. д. Но зачем вообще использовать мост? На этот вопрос легко ответить, рассмотрев следующий пример.
Пример тензодатчика
Одним из распространенных примеров резистивного моста является тензодатчик с четырьмя активными элементами. Четыре тензорезистора расположены в виде моста и прикреплены к жесткой конструкции, которая слегка деформируется при приложении нагрузки. По мере приложения нагрузки значение двух тензодатчиков увеличивается, а значение двух других тензодатчиков уменьшается. Эти изменения сопротивления очень малы. Полномасштабный выход типичного тензодатчика составляет 2 мВ на вольт возбуждения. Из уравнения 2 видно, что это эквивалентно полномасштабному изменению сопротивления всего на 0,2%. Если выход тензодатчика должен быть измерен с точностью до 12 бит, то изменения сопротивления должны быть точно измерены на 1/2 ppm. Для прямого измерения изменений на 1/2 ppm потребуется 21-разрядный АЦП. Помимо АЦП с очень высоким разрешением, эталонный АЦП должен быть сверхстабильным. Оно не могло измениться более чем на 1/2 части на миллион в зависимости от температуры. Эти две причины обеспечивают достаточную мотивацию для использования моста, но есть еще более весомая причина.
Помимо АЦП с очень высоким разрешением, эталонный АЦП должен быть сверхстабильным. Оно не могло измениться более чем на 1/2 части на миллион в зависимости от температуры. Эти две причины обеспечивают достаточную мотивацию для использования моста, но есть еще более весомая причина.
Резисторы в тензодатчике реагируют не только на приложенную нагрузку. Термическое расширение конструкции, к которой они прикреплены, и TCR самого материала датчика вызовут изменения сопротивления. Эти нежелательные изменения сопротивления могут быть такими же большими или даже больше, чем изменение, вызванное предполагаемой нагрузкой. Если же эти нежелательные изменения происходят одинаково во всех резисторах моста, то их влияние незначительно или отсутствует. Например, нежелательное изменение на 200 частей на миллион эквивалентно 10% полной шкалы в этом примере. Но в уравнении 2 изменение R на 200 частей на миллион создает разницу менее чем в 1 младший бит при 12-битном измерении. Во многих случаях желаемое изменение сопротивления, dR, прямо пропорционально объемному сопротивлению, R. В этих случаях изменение R на 200 частей на миллион не должно иметь никакого эффекта, поскольку отношение dR/R остается прежним. Значение R может удвоиться, а выходное напряжение не пострадает, поскольку dR также удвоится.
В этих случаях изменение R на 200 частей на миллион не должно иметь никакого эффекта, поскольку отношение dR/R остается прежним. Значение R может удвоиться, а выходное напряжение не пострадает, поскольку dR также удвоится.
Приведенный выше пример показывает, как использование моста может облегчить задачу измерения очень малых изменений сопротивления. В следующем разделе рассматриваются основные проблемы схемы при измерении моста.
Пять ключевых проблем в мостовых схемах
Есть много соображений при измерении мостов с низкой выходной мощностью. Пять наиболее важных проблем:
- Напряжение возбуждения
- Синфазное напряжение
- Напряжение смещения
- Смещение дрейфа
- Шум
Напряжение возбуждения
Уравнение 1 показывает, что выход любого моста прямо пропорционален напряжению его питания. Следовательно, схема должна либо поддерживать постоянное напряжение питания с той же точностью, что и желаемое измерение, либо компенсировать изменения напряжения питания.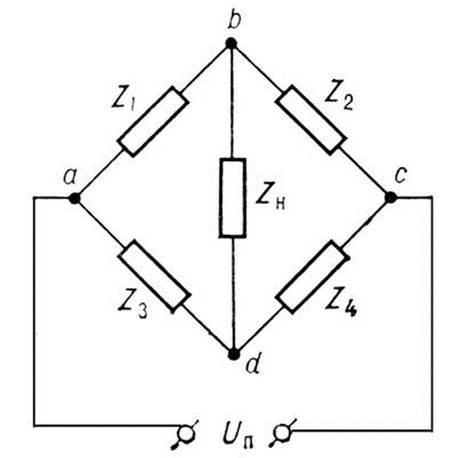 Самый простой способ компенсировать изменения напряжения питания — получить опорное напряжение АЦП из возбуждения моста. На рис. 2 опорное напряжение АЦП поступает от делителя напряжения, включенного параллельно мосту. Это приводит к отклонению изменений напряжения питания, поскольку разрешение АЦП по напряжению будет меняться вместе с чувствительностью моста.
Самый простой способ компенсировать изменения напряжения питания — получить опорное напряжение АЦП из возбуждения моста. На рис. 2 опорное напряжение АЦП поступает от делителя напряжения, включенного параллельно мосту. Это приводит к отклонению изменений напряжения питания, поскольку разрешение АЦП по напряжению будет меняться вместе с чувствительностью моста.
Рис. 2. Опорное напряжение для АЦП пропорционально Ve. Это устраняет ошибки усиления из-за изменений в Ve.
Альтернативный подход использует дополнительный входной канал на АЦП для измерения напряжения возбуждения моста. Затем программное обеспечение может компенсировать изменения напряжения моста. Уравнение 7 показывает скорректированное выходное напряжение (Voc) как функцию измеренного выходного напряжения (Vom), измеренного напряжения возбуждения (Vem) и напряжения возбуждения во время калибровки (Veo).
Вок = ВомВео/Вем
Синфазное напряжение
Одним из недостатков моста является то, что на выходе получается дифференциальный сигнал с синфазным напряжением, равным половине напряжения питания. Часто этот дифференциальный сигнал необходимо сдвинуть по уровню и преобразовать в сигнал относительно земли перед подачей на АЦП. Если это необходимо, обратите пристальное внимание на отклонение синфазного сигнала системы и на то, как на синфазное напряжение влияют изменения Ve. Возвращаясь к приведенному выше примеру с тензодатчиком, рассмотрим влияние изменения Ve, если инструментальный усилитель используется для преобразования дифференциального сигнала от моста в несимметричный сигнал. Если Ve позволить измениться на 2 %, синфазное напряжение на выходе моста изменится на 1 % от Ve. Если влияние этого сдвига синфазного сигнала ограничено 1/4 спецификации точности, то усилитель должен иметь подавление синфазного сигнала 98,3 дБ или выше. (20log[0,01Ве/(0,002Ве/(40964))] = 98,27). Этот уровень производительности, безусловно, достижим, но он выходит за рамки многих недорогих или дискретных инструментальных усилителей.
Часто этот дифференциальный сигнал необходимо сдвинуть по уровню и преобразовать в сигнал относительно земли перед подачей на АЦП. Если это необходимо, обратите пристальное внимание на отклонение синфазного сигнала системы и на то, как на синфазное напряжение влияют изменения Ve. Возвращаясь к приведенному выше примеру с тензодатчиком, рассмотрим влияние изменения Ve, если инструментальный усилитель используется для преобразования дифференциального сигнала от моста в несимметричный сигнал. Если Ve позволить измениться на 2 %, синфазное напряжение на выходе моста изменится на 1 % от Ve. Если влияние этого сдвига синфазного сигнала ограничено 1/4 спецификации точности, то усилитель должен иметь подавление синфазного сигнала 98,3 дБ или выше. (20log[0,01Ве/(0,002Ве/(40964))] = 98,27). Этот уровень производительности, безусловно, достижим, но он выходит за рамки многих недорогих или дискретных инструментальных усилителей.
Напряжение смещения
Смещения моста и измерительной электроники сдвигают желаемый сигнал вверх или вниз. Компенсировать эти сдвиги во время калибровки несложно, пока сигнал остается в пределах активного диапазона электроники. Если сигнал дифференциального моста преобразуется в сигнал относительно земли, смещение моста и усилителей может легко создать сигнал, который теоретически находится под землей. Когда это происходит, создается мертвая зона. Выходной сигнал АЦП остается равным нулю до тех пор, пока выходной сигнал моста не станет достаточно положительным, чтобы преодолеть все отрицательные смещения в системе. Чтобы предотвратить это, в схему необходимо предусмотреть положительное смещение. Это смещение гарантирует, что выходной сигнал будет в активном диапазоне, даже если мост и электроника имеют отрицательное смещение. Меньшая проблема со смещением — уменьшение динамического диапазона. В этом случае могут потребоваться компоненты более высокого качества или электронная регулировка смещения. Регулировку смещения можно выполнить с помощью механических потенциометров, цифровых потенциометров или даже путем подключения резисторов к битам GPIO на АЦП.
Компенсировать эти сдвиги во время калибровки несложно, пока сигнал остается в пределах активного диапазона электроники. Если сигнал дифференциального моста преобразуется в сигнал относительно земли, смещение моста и усилителей может легко создать сигнал, который теоретически находится под землей. Когда это происходит, создается мертвая зона. Выходной сигнал АЦП остается равным нулю до тех пор, пока выходной сигнал моста не станет достаточно положительным, чтобы преодолеть все отрицательные смещения в системе. Чтобы предотвратить это, в схему необходимо предусмотреть положительное смещение. Это смещение гарантирует, что выходной сигнал будет в активном диапазоне, даже если мост и электроника имеют отрицательное смещение. Меньшая проблема со смещением — уменьшение динамического диапазона. В этом случае могут потребоваться компоненты более высокого качества или электронная регулировка смещения. Регулировку смещения можно выполнить с помощью механических потенциометров, цифровых потенциометров или даже путем подключения резисторов к битам GPIO на АЦП.
Смещение дрейфа электроники
Дрейф смещения и шум, безусловно, являются самыми большими проблемами, связанными с мостовыми схемами. В приведенном выше примере с тензодатчиком выходной сигнал полной шкалы моста составляет 2 мВ/В, а требуемая точность — 12 бит. Если тензодатчик питается от источника питания 5 В, то выходное напряжение полной шкалы будет равно 10 мВ, а точность измерения должна быть не ниже 2,5 мкВ. Проще говоря, смещение смещения всего на 2,5 мкВ создаст ошибку в 1 младший бит на 12-битном уровне. Это сложное требование для высококачественных обычных операционных усилителей. Например, OP07 имеет максимальное смещение TC 1,3 мкВ/Кл и максимальный долгосрочный дрейф 1,5 мкВ в месяц. Чтобы поддерживать очень низкий дрейф смещения, необходимый для мостов, необходима некоторая активная регулировка смещения. Это может быть сделано с помощью аппаратного обеспечения, программного обеспечения или их комбинации.
Аппаратная регулировка смещения : Усилители, стабилизированные прерывателем или автоматически обнуляющие, представляют собой чисто аппаратное решение. В усилитель встроена специальная схема, которая постоянно производит выборку входного сигнала и подстраивается таким образом, чтобы поддерживать минимальную разницу в напряжении между входными контактами. Поскольку эти регулировки непрерывны, дрейф во времени и температуре становится функцией схемы коррекции, а не фактическим смещением усилителя. Типичные дрейфы смещения MAX4238 и MAX4239 составляют 10 нВ/°C и 50 нВ/1000 часов.
В усилитель встроена специальная схема, которая постоянно производит выборку входного сигнала и подстраивается таким образом, чтобы поддерживать минимальную разницу в напряжении между входными контактами. Поскольку эти регулировки непрерывны, дрейф во времени и температуре становится функцией схемы коррекции, а не фактическим смещением усилителя. Типичные дрейфы смещения MAX4238 и MAX4239 составляют 10 нВ/°C и 50 нВ/1000 часов.
Корректировка смещения с помощью программного обеспечения : Калибровка нуля или измерение веса тары являются примерами корректировки смещения с помощью программного обеспечения. Выход моста измеряется, когда мост находится в одном состоянии, например, без нагрузки на ячейку. Затем к ячейке прикладывается нагрузка и снимаются другие показания. Разница в двух показаниях связана только с примененным стимулом. Взятие разницы в показаниях снимает не только смещение электроники, но и смещение моста. Это чрезвычайно эффективная техника, но ее можно использовать только тогда, когда желаемый результат основан на изменении выходного сигнала моста.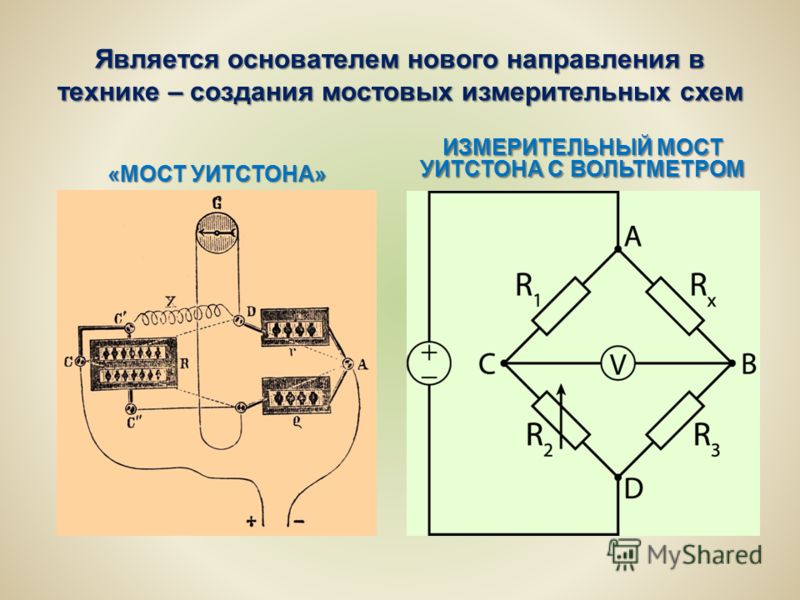 Если требуется абсолютное показание выходного сигнала моста, этот метод использовать нельзя.
Если требуется абсолютное показание выходного сигнала моста, этот метод использовать нельзя.
Аппаратная/программная регулировка смещения: добавление в схему двухполюсного аналогового переключателя позволяет выполнять программную калибровку практически в любом приложении. На рис. 3 переключатель используется для отключения одной стороны моста от усилителя и замыкания входов усилителя. Если оставить другую сторону моста подключенной к входу усилителя, поддерживается синфазное входное напряжение, что устраняет любые ошибки, которые могут быть вызваны изменениями синфазного напряжения. Замыкание входа усилителя позволяет выполнить измерение системного смещения. Это показание затем вычитается из последующих нормальных показаний, чтобы удалить смещение всей электроники. К сожалению, этот метод не может устранить смещение мостовидного протеза.
Рис. 3. Добавление переключателя позволяет выполнить калибровку программного обеспечения.
Этот тип автоматической калибровки нуля встроен во многие современные АЦП и чрезвычайно эффективен при устранении смещения АЦП.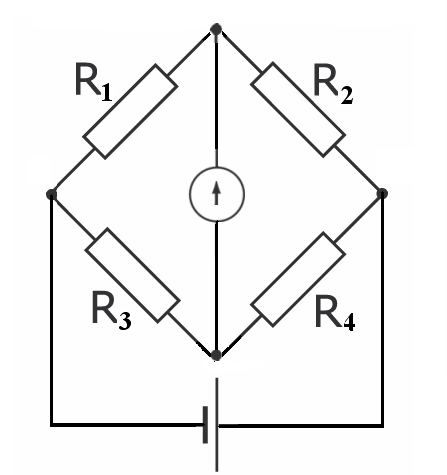 Однако это не устраняет смещения моста или смещения какой-либо электроники между мостом и АЦП.
Однако это не устраняет смещения моста или смещения какой-либо электроники между мостом и АЦП.
Немного более сложная форма коррекции смещения использует двухполюсный двухпозиционный переключатель между мостом и электроникой (см. рис. 4). Переключение переключателя из положения A в положение B меняет полярность соединения между мостом и усилителем. Если показание АЦП, снятое, когда переключатель находится в положении B, вычесть из показания АЦП, снятого, когда переключатель находится в положении A, результатом будет 2VoGain. Срок зачета отсутствует. Этот метод не только устраняет смещение электроники, но и улучшает отношение сигнал/шум в два раза.
Рис. 4. Иллюстрация добавления двухполюсного переключателя на два направления для расширенной калибровки программного обеспечения.
Мостовое возбуждение переменным током : хотя сегодня оно редко используется, в течение многих лет возбуждение резистивных мостов переменным током было распространенным и эффективным способом устранения ошибок смещения постоянного тока в электронике. Если мост управляется напряжением переменного тока, на выходе моста также будет сигнал переменного тока. Этот сигнал может быть емкостно связан, усилен, смещен по уровню и т. д., и амплитуда переменного тока конечного сигнала не будет зависеть от каких-либо смещений постоянного тока в электронике. Амплитуда сигнала переменного тока затем измеряется с использованием стандартных методов измерения переменного тока. Когда используется возбуждение переменным током, это должно быть достигнуто за счет минимизации изменений синфазного напряжения моста. Это значительно снижает требования схемы к подавлению синфазных помех.
Если мост управляется напряжением переменного тока, на выходе моста также будет сигнал переменного тока. Этот сигнал может быть емкостно связан, усилен, смещен по уровню и т. д., и амплитуда переменного тока конечного сигнала не будет зависеть от каких-либо смещений постоянного тока в электронике. Амплитуда сигнала переменного тока затем измеряется с использованием стандартных методов измерения переменного тока. Когда используется возбуждение переменным током, это должно быть достигнуто за счет минимизации изменений синфазного напряжения моста. Это значительно снижает требования схемы к подавлению синфазных помех.
Шум
Как упоминалось выше, шум является одной из самых больших проблем при работе с маломощными мостами. Кроме того, низкочастотный характер многих мостовых приложений означает, что также необходимо учитывать «мерцание» или шум 1/F. Подробное обсуждение шума выходит далеко за рамки этой статьи, и на эту тему уже написано много статей. Здесь достаточно сказать, что в любом хорошем проекте следует учитывать четыре источника шумоподавления.
- Предотвращение помех в системе (правильное заземление, экранирование и электропроводка)
- Уменьшение шума, создаваемого в системе (архитектура, выбор компонентов и уровни смещения)
- Уменьшение электронного шума (аналоговые фильтры, подавление синфазных помех)
- Программная компенсация или DSP (алгоритмы, использующие множественные измерения для улучшения полезного сигнала и подавления нежелательных сигналов)
Разработанные в последние годы сигма-дельта преобразователи высокого разрешения значительно упростили задачу оцифровки мостовых сигналов. В следующем разделе будет показано, как эти преобразователи решают пять проблем, связанных с шумом, которые обсуждались выше.
Сигма-дельта преобразователи высокого разрешения (АЦП)
Современные 24- и 16-разрядные сигма-дельта АЦП с малошумящими PGA почти идеально подходят для измерения резистивных мостов в низкоскоростных приложениях. Они решают пять основных проблем (см. обсуждение выше, рис. 2 и далее), связанных с попыткой оцифровать аналоговый выход моста.
обсуждение выше, рис. 2 и далее), связанных с попыткой оцифровать аналоговый выход моста.
Изменения напряжения возбуждения, Ve
Буферизованные входы опорного напряжения упрощают задачу построения логометрической системы. Резистор-делитель и шумоподавляющий конденсатор — единственные компоненты, необходимые для создания опорного напряжения, которое отслеживает Ve. (См. рис. 2.) В логометрической системе выходной сигнал нечувствителен к небольшим изменениям Ve, и отпадает необходимость в высокоточном эталонном напряжении.
Если логометрическая система не подходит, эти многоканальные АЦП являются альтернативным решением. Один канал АЦП можно использовать для измерения выходного сигнала моста, а второй входной канал — для измерения напряжения возбуждения моста. Уравнение 7, приведенное выше, затем можно использовать для корректировки изменений Ve.
Синфазное напряжение
Если мост и АЦП питаются от одного источника, то на выходе моста будет дифференциальный сигнал 1/2 В DD .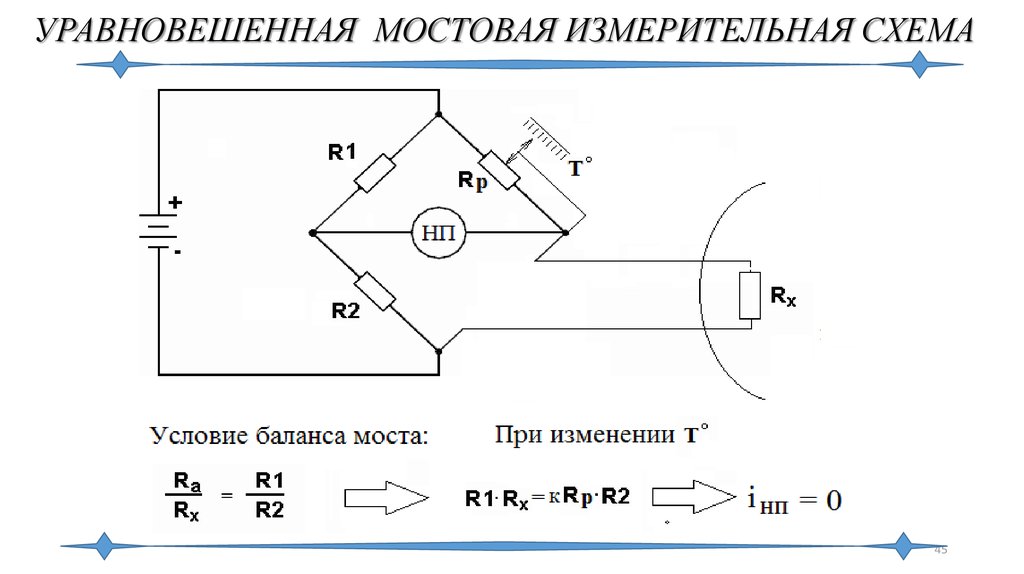 Эти входные условия идеальны для большинства сигма-дельта преобразователей с высоким разрешением. Кроме того, их превосходное подавление синфазного сигнала (более 100 дБ) устраняет опасения по поводу небольших изменений синфазного напряжения.
Эти входные условия идеальны для большинства сигма-дельта преобразователей с высоким разрешением. Кроме того, их превосходное подавление синфазного сигнала (более 100 дБ) устраняет опасения по поводу небольших изменений синфазного напряжения.
Напряжение смещения
При разрешении по напряжению в диапазоне субмкВ выход моста может быть подключен непосредственно к входу АЦП. При условии отсутствия эффектов термопары единственным источником ошибки смещения является сам АЦП. Чтобы уменьшить ошибку смещения, большинство этих преобразователей имеют внутренние переключатели, которые позволяют им подавать на вход нулевое напряжение и проводить измерения. Затем это измерение можно вычесть из последующих измерений моста, чтобы удалить любое смещение в АЦП. Многие АЦП выполняют эту калибровку нуля автоматически; в других случаях пользователь должен намеренно корректировать смещение АЦП. Этот метод коррекции смещения уменьшает ошибки смещения до уровня шума АЦП, который может быть менее 1 мкВ PP .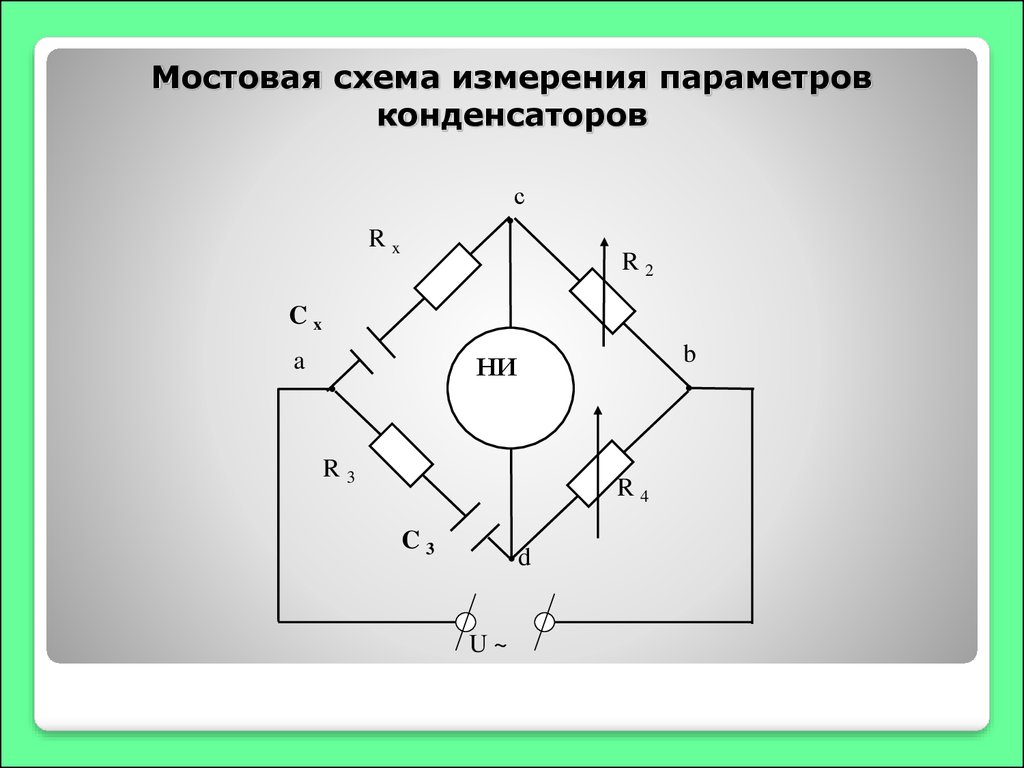
Смещение оправки
Использование калибровки нуля на АЦП постоянно или достаточно часто, чтобы температура не могла существенно измениться между циклами калибровки, эффективно устраняет любые изменения смещения из-за изменения температуры или долговременного дрейфа. Следует отметить, что изменения показаний смещения могут равняться размаху шума АЦП. Если целью является обнаружение небольших изменений выходного сигнала моста в течение относительно короткого периода времени, возможно, будет лучше отключить функцию автоматической калибровки, поскольку это устранит один источник шума.
Шум
Шум устраняется тремя способами, наиболее очевидным из которых является внутренний цифровой фильтр. Этот фильтр практически устраняет влияние высокочастотного шума, а также может обеспечивать подавление низкочастотного шума, улавливаемого линиями электропередач. В нормальном режиме подавление частот линии электропередач обычно лучше 100 дБ. Вторая форма шумоподавления связана с высоким подавлением синфазного сигнала, опять же, как правило, более 100 дБ. Подавление синфазного сигнала уменьшает нежелательный шум, улавливаемый проводами моста, и уменьшает влияние шума на напряжение возбуждения моста. Наконец, непрерывная калибровка нуля уменьшает мерцание или шум 1/F на частотах ниже частоты обновления калибровки.
Подавление синфазного сигнала уменьшает нежелательный шум, улавливаемый проводами моста, и уменьшает влияние шума на напряжение возбуждения моста. Наконец, непрерывная калибровка нуля уменьшает мерцание или шум 1/F на частотах ниже частоты обновления калибровки.
Недорогие трюки
Подключение выхода моста напрямую ко входу сигма-дельта АЦП с высоким разрешением не является решением всех проблем. В некоторых приложениях требуется преобразование сигнала для согласования выхода моста со входом используемого АЦП. Это преобразование сигнала относится к одной из трех основных категорий: усиление, сдвиг уровня и преобразование дифференциального сигнала в несимметричный. Хороший инструментальный усилитель справится со всеми этими задачами, но может быть дорогим, и ему может не хватать дрейфа смещения. Следующие схемы могут обеспечить адекватное преобразование сигнала по более низкой цене, чем инструментальный усилитель.
Одиночный операционный усилитель
Если требуется только усиление, то может работать простая схема, показанная на рис. 5. На первый взгляд это плохой выбор, потому что он не сбалансирован и создает нагрузку на мост. Однако загрузка моста (хотя и нежелательная) не обязательно является проблемой. Многие мосты имеют низкий импеданс; 350 Ом довольно распространены. Импеданс каждого выхода будет вдвое меньше, или 150 Ом. Эти 150 Ом сопротивления немного снижают усиление, добавляя к сопротивлению R1. Компенсацию этого дополнительного сопротивления легко выполнить, выбрав значение R1 на 150 Ом меньше. Конечно, будет некоторая погрешность в значении 150 Ом, а температурный коэффициент сопротивления (TCR) моста может не точно соответствовать TCR R1 и R2. Тем не менее, если R1 намного больше 150 Ом, эти эффекты будут весьма незначительными. Переключатель для калибровки нуля также показан на рис. 5.
5. На первый взгляд это плохой выбор, потому что он не сбалансирован и создает нагрузку на мост. Однако загрузка моста (хотя и нежелательная) не обязательно является проблемой. Многие мосты имеют низкий импеданс; 350 Ом довольно распространены. Импеданс каждого выхода будет вдвое меньше, или 150 Ом. Эти 150 Ом сопротивления немного снижают усиление, добавляя к сопротивлению R1. Компенсацию этого дополнительного сопротивления легко выполнить, выбрав значение R1 на 150 Ом меньше. Конечно, будет некоторая погрешность в значении 150 Ом, а температурный коэффициент сопротивления (TCR) моста может не точно соответствовать TCR R1 и R2. Тем не менее, если R1 намного больше 150 Ом, эти эффекты будут весьма незначительными. Переключатель для калибровки нуля также показан на рис. 5.
Рис. 5. Пример сопряжения с мостом с низким импедансом.
Дифференциал по сравнению с приборами
Во многих случаях вместо инструментального усилителя можно использовать дифференциальный усилитель.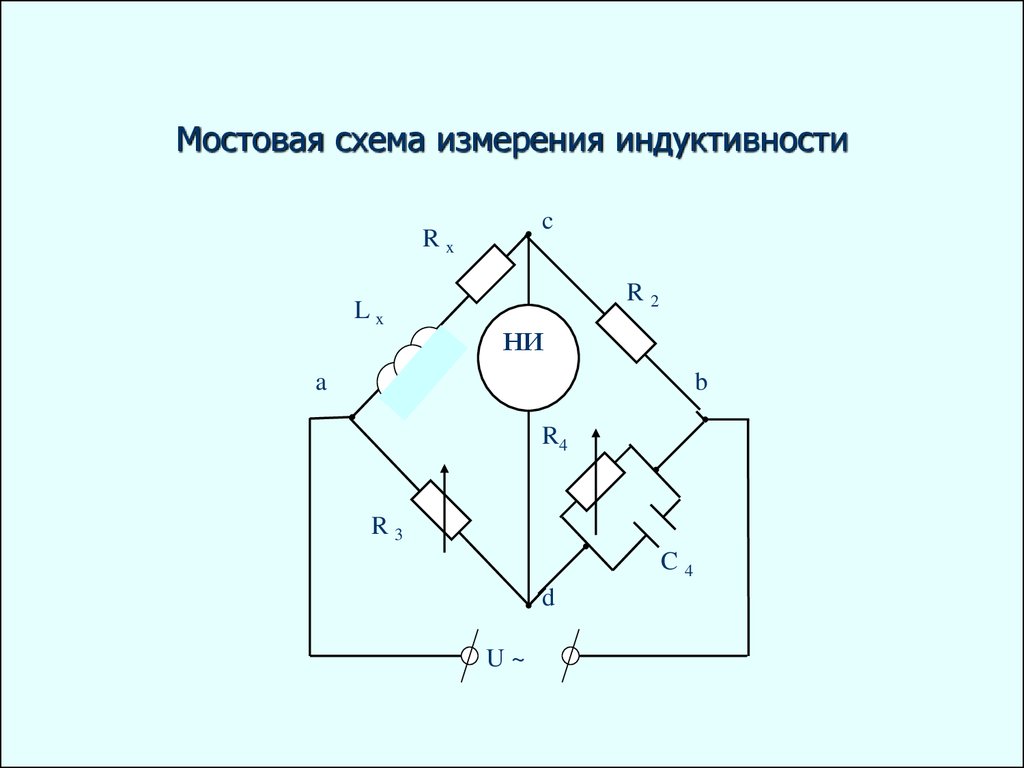 Это не только снижает стоимость, но также уменьшает количество источников шума и источников дрейфа смещения. Как и в случае усилителя выше, необходимо учитывать значение и TRC резисторов моста.
Это не только снижает стоимость, но также уменьшает количество источников шума и источников дрейфа смещения. Как и в случае усилителя выше, необходимо учитывать значение и TRC резисторов моста.
Двойной источник питания
Схема на рис. 6 заслуживает упоминания из-за ее простоты. Выходной сигнал моста усиливается, сдвигается по уровню и преобразуется в сигнал относительно земли с использованием всего двух операционных усилителей и двух резисторов. Кроме того, эта схема удваивает напряжение на мосту, что удваивает выходной сигнал. Однако у этого подхода есть недостаток — он требует отрицательного источника питания и дает слегка нелинейный выходной сигнал при использовании полностью активного моста. Для мостов с активными элементами только на одной стороне этой ошибки линейности можно избежать, используя пассивную сторону моста в контуре обратной связи, который генерирует -Ve.
Рис. 6. Иллюстрация альтернативной схемы сопряжения с низкоимпедансным мостом.